赤外線位置天文観測衛星
(JASMINE) 計画
第2回検討報告書
∼Japan Astrometry Satellite Mission
for INfrared Exploration∼
JASMINE ワーキンググループ
2008 年 5 月
3
目次
第 I 部 総論
13
第1章
序文
15
第2章
ミッション概要
17
2.1
ミッション目標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.2
期待される科学的成果 . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
解析手法
25
3.1
観測手法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.2
位置天文パラメータ導出のための解析手法 . . . . . . . . . . . . . . . .
32
観測装置および衛星システムのデザイン
37
4.1
衛星のデザイン概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.2
望遠鏡・光学系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
4.3
検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.4
ジオメトリーモニター . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
4.5
姿勢軌道制御系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.6
熱・構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
4.7
素材 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.8
質量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
4.9
通信 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.10
電源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.11
運用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
誤差配分
69
5.1
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.2
ランダム誤差要因
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.3
システム誤差要因
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
第3章
第4章
第5章
第6章
技術的課題
79
6.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
6.2
光学系の課題と実証手順 . . . . . . . . . . . . . . . . . . . . . . . . . .
79
6.3
星像中心解析に関する課題と実証手順 . . . . . . . . . . . . . . . . . . .
80
4
目次
6.4
検出器に関する課題と実証手順 . . . . . . . . . . . . . . . . . . . . . .
80
6.5
モニター装置の課題と実証手順 . . . . . . . . . . . . . . . . . . . . . .
81
6.6
放射線の影響に関する課題と実証手順 . . . . . . . . . . . . . . . . . . .
87
6.7
衛星システム検討
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
6.8
課題リスト . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
マイルストーン
95
7.1
概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
7.2
Nano-JASMINE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
96
第7章
第8章
海外での評価
103
8.1
掲載文書 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
8.2
Position Formulated by the Scientific Organising Committee . . . . . 103
8.3
Comments of Jasmine report . . . . . . . . . . . . . . . . . . . . . . . 104
第9章
組織と体制
107
第 10 章
まとめ
109
第 II 部 位置天文の歴史とサイエンス
111
第 11 章
113
位置天文学の発展
11.1
地上からスペースへ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
11.2
高精度アストロメトリの時代へ . . . . . . . . . . . . . . . . . . . . . . 114
11.3
スペースアストロメトリ計画と VERA 計画 . . . . . . . . . . . . . . . . 116
11.4
近赤外線スペースアストロメトリ計画の必要性 . . . . . . . . . . . . . . 116
第 12 章
期待される科学的成果の詳細
119
12.1
バルジの形成・進化と力学構造 . . . . . . . . . . . . . . . . . . . . . . 119
12.2
バルジと巨大ブラックホールの共進化 . . . . . . . . . . . . . . . . . . . 120
12.3
長距離力系の統計物理学 . . . . . . . . . . . . . . . . . . . . . . . . . . 120
12.4
力学構造の構築 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
12.5
高精度距離決定による高精度化学組成決定 . . . . . . . . . . . . . . . . 125
12.6
星の初期質量関数
12.7
系外惑星探査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
12.8
重力レンズ天体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
第 III 部 技術的課題と仕様の最適化
145
第 13 章
147
位置天文観測の要求分析
13.1
システムエンジニアリングと要求分析 . . . . . . . . . . . . . . . . . . . 147
13.2
位置天文観測の要求 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
第 14 章
基本仕様と共通課題
157
5
14.1
目標精度の根拠 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
14.2
基本仕様の導出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
14.3
誤差要因の列挙 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
14.4
データ転送量の検討 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
14.5
解析手法の考えかたに関する一考察 . . . . . . . . . . . . . . . . . . . . 167
14.6
観測・解析手法、測光観測、問題点と帯法 . . . . . . . . . . . . . . . . 169
第 15 章
データ解析と位置天文パラメータの精度とバイアス
175
15.1
Malmquist バイアス . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
15.2
単純な変数変換によるバイアス . . . . . . . . . . . . . . . . . . . . . . 176
15.3
Lutz Kelker バイアス . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
第 16 章
各ステージごとの誤差
181
16.1
Stage1:星像中心決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
16.2
Stage2:大フレームの構築 . . . . . . . . . . . . . . . . . . . . . . . . . 184
16.3
Stage3:大フレームの結合 . . . . . . . . . . . . . . . . . . . . . . . . . 199
16.4
Stage4:座標系の固定など . . . . . . . . . . . . . . . . . . . . . . . . . 204
第 IV 部 付録:データ解析・データハンドリング・システムシミュレー
ション
205
付録 A
Simulator の設計
207
A.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
A.2
情報科学の手法の導入 . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
A.3
JASMINE Simulator の機能の分析 . . . . . . . . . . . . . . . . . . . . 216
A.4
JASMINE Simulator の設計–フレームワークの構築 . . . . . . . . . . . 217
A.5
JASMINE Simulator の実装 . . . . . . . . . . . . . . . . . . . . . . . 224
A.6
応用例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
A.7
設計および実装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
A.8
コード開発上の既約など . . . . . . . . . . . . . . . . . . . . . . . . . . 241
A.9
動作例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
A.10
まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
A.11
謝辞 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
A.12
用語集 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
付録 B
データ圧縮
251
B.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
B.2
データ圧縮の分類と原理 . . . . . . . . . . . . . . . . . . . . . . . . . . 253
B.3
Karhunen-Loeve 変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
B.4
Golomb(-Rice) 符号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
B.5
まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
付録 C
位置天文観観測データの解析と感度解析
263
6
目次
C.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
C.2
位置天文パラメータの推定 . . . . . . . . . . . . . . . . . . . . . . . . . 263
C.3
カルマンフィルターと行列の逐次反転の類似性 . . . . . . . . . . . . . . 268
C.4
位置天文パラメータの拘束条件の構築 . . . . . . . . . . . . . . . . . . . 270
C.5
位置天文パラメータの逐次解法 . . . . . . . . . . . . . . . . . . . . . . 272
C.6
トイモデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
C.7
位置天文観測の adjustment parameter . . . . . . . . . . . . . . . . . . 288
C.8
本分析に関連する行列の定理
C.9
本分析に関連する統計学の基礎事項 . . . . . . . . . . . . . . . . . . . . 301
C.10
本分析に関連する線形推定問題に関する定理 . . . . . . . . . . . . . . . 302
C.11
行列反転の逐次更新に関する定理 . . . . . . . . . . . . . . . . . . . . . 309
C.12
まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
. . . . . . . . . . . . . . . . . . . . . . . 290
参考文献
325
索引
333
7
図目次
2.1
バルジ・太陽系の銀河系内の位置関係 . . . . . . . . . . . . . . . . . . .
17
2.2
年周視差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.3
固有運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
2.4
サーベイ領域 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
2.5
survey-region . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.6
銀河系バルジと中心部の模式図 . . . . . . . . . . . . . . . . . . . . . .
24
3.1
フレーム連結の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
4.1
デザイン . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.2
JASMINE の望遠鏡概念図
. . . . . . . . . . . . . . . . . . . . . . . .
38
4.3
設計光学系の評価
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
4.4
レーザー干渉計型高精度ジオメトリーモニター装置の概要 . . . . . . . .
43
4.5
ヘテロダイン型マッハ・ツェンダーレーザー干渉計: 概略図 . . . . . . .
44
4.6
ヘテロダイン型マッハ・ツェンダーレーザー干渉計: 光検出器からの出力
信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.7
位相比較器の測定雑音のパワースペクトル密度 . . . . . . . . . . . . . .
45
4.8
姿勢変更手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.9
軌道候補 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.10
HISO の場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.11
HCPO の場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4.12
蝕に入る可能性のある地球位置 . . . . . . . . . . . . . . . . . . . . . .
50
4.13
蝕に入る JASMINE 位置 . . . . . . . . . . . . . . . . . . . . . . . . .
50
4.14
熱モデルの概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
4.15
放射放射結合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
4.16
放射伝熱結合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
4.17
放射伝熱結合が共存する場合
. . . . . . . . . . . . . . . . . . . . . . .
54
4.18
単純な熱解析の結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.19
問題となる周波数
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.20
衛星構造の概念図
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.21
鏡面材料の特性比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
4.22
SiC の熱膨張率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
4.23
ゼロ膨張ガラスの熱膨張率 . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.24
CFRP の熱膨張率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
8
図目次
4.25
参考資料 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.26
JASMINE 形状案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.27
JASMINE による観測の様子 . . . . . . . . . . . . . . . . . . . . . . .
62
4.28
熱経路概念図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.29
CFRP 熱伝導率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.30
A6061 比熱 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
4.31
鏡面凹凸及び鏡サイズ変動量
. . . . . . . . . . . . . . . . . . . . . . .
66
4.32
運用モード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
5.1
Table of Error Budget . . . . . . . . . . . . . . . . . . . . . . . . . .
78
6.1
モニター装置の主な開発要素 3 項目 . . . . . . . . . . . . . . . . . . . .
82
6.2
鏡の動きに対する 3 自由度同時測定のための光学系デザイン . . . . . . .
84
6.3
鏡の動きに対する 3 自由度同時測定のための光学系セットアップ . . . .
84
6.4
リファレンス信号の位相安定度のパワースペクトル密度 . . . . . . . . .
85
6.5
マッハツェンダーレーザー干渉計の変位量の時系列データ . . . . . . . .
86
6.6
マッハ・ツェンダーレーザー干渉計変位量時系列のパワースペクトル密度
86
6.7
概念図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
6.8
概念図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
7.1
Nano-JASMINE 概念図 . . . . . . . . . . . . . . . . . . . . . . . . . .
96
7.2
Nano-JASMINE の軌道 . . . . . . . . . . . . . . . . . . . . . . . . . .
97
7.3
Nano-JASMINE 望遠鏡 . . . . . . . . . . . . . . . . . . . . . . . . . .
97
7.4
撮像試験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
7.5
星像切り出し回路
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
7.6
Nano-JASMINE バス機器 . . . . . . . . . . . . . . . . . . . . . . . . .
99
7.7
Nano-JASMINE バス機器の環境試験 . . . . . . . . . . . . . . . . . . . 100
7.8
Nano-JASMINE 通信系 . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.1
アストロメトリ観測で高精度情報が得られる銀河系の範囲 . . . . . . . . 115
12.1
ハロー、thick disk、thin disk に属する星々の金属量の進化 . . . . . . . 126
12.2
さまざまな星形成領域における観測された α の分布。 . . . . . . . . . . 128
12.3
星の数が減少したときの初期質量関数の揺らぎ。 . . . . . . . . . . . . . 129
12.4
星の数が減少したときの α の揺らぎ。
12.5
マイクロ重力レンズによる星像中心位置の変化 . . . . . . . . . . . . . . 135
12.6
マイクロ重力レンズイベント検出効率のシミュレーションの結果
12.7
レンズ天体と光源の位置及び+像、−像、その重心の軌道。 . . . . . . . 139
12.8
重心 (太線) と+像 (破線) の軌道と各点での時間。 . . . . . . . . . . . . 139
12.9
θcrit± の u0 依存性とタイプ A、B、C の分類。 . . . . . . . . . . . . . . 140
12.10
タイプ A、B、C の (θx , θy ) の時間依存性。 . . . . . . . . . . . . . . . 140
12.11
タイプ A、B、C の軌道。 . . . . . . . . . . . . . . . . . . . . . . . . . 140
12.12
3 種のレンズ天体の諸量 . . . . . . . . . . . . . . . . . . . . . . . . . . 143
. . . . . . . . . . . . . . . . . . 130
. . . . 136
9
12.13
3 種のレンズ天体の諸量 . . . . . . . . . . . . . . . . . . . . . . . . . . 143
13.1
要求整理。赤い線で示したものはオプションで、黒い線を実現するのに
どれか一つのうすい線を実現すればよい。濃い線で示したものは要求で
あり、上流 (図左側) のオプション (うすい線) を実現するにはつながった
濃い線 (要求) がすべて満たされる必要がある。 . . . . . . . . . . . . . . 149
13.2
フォールトツリー書式で書いた JASMINE の要求整理 . . . . . . . . . . 155
14.1
仕様を検討するパラメータ同志の関係 . . . . . . . . . . . . . . . . . . . 158
14.2
姿勢制御による誤差 Vatt と読み出しノイズ Vreadout
14.3
parallax factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
14.4
大フレーム構築の視野結合による誤差 VLF . . . . . . . . . . . . . . . . 163
14.5
各ステージでの誤差要因と推定精度と時間配分 . . . . . . . . . . . . . . 164
14.6
推定に伴う誤差要因と時間配分の積算 . . . . . . . . . . . . . . . . . . . 165
14.7
焦点面に密に検出器を実装する場合 . . . . . . . . . . . . . . . . . . . . 165
14.8
「面積」-「面積あたり観測時間」図上での JASMINE の解析パス . . . . 167
14.9
「面積」-「面積あたり観測時間」時間一定線 . . . . . . . . . . . . . . . 168
14.10
ランダム誤差および要求値 . . . . . . . . . . . . . . . . . . . . . . . . . 170
14.12
Focal plane assembly for photometry observation . . . . . . . . . . . 170
14.11
静定時間と熱安定時間の制約
14.13
strip method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
14.14
種々の方法の比較
15.1
Malmquist Bias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
15.2
合成データの特性
15.3
Lutz Kelker bias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
15.4
2000 個の sinthetic data に対する様々な値の分布 . . . . . . . . . . . . 179
16.1
連結精度と画角サイズの関係
16.2
観測領域における星の個数密度分布 . . . . . . . . . . . . . . . . . . . . 187
16.3
観測領域における星の個数密度分布 (対数マップ) . . . . . . . . . . . . 187
16.4
望遠鏡主鏡副鏡と支柱 . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
16.5
各支柱の平均温度の時間変化
16.6
tilt を抑える構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
16.7
図 16.6 による tilt と decenter の変動 . . . . . . . . . . . . . . . . . . . 191
16.8
図 16.6 による温度変動
16.9
主鏡面温度分布 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
16.10
開発予定のモニター装置 . . . . . . . . . . . . . . . . . . . . . . . . . . 193
16.11
開発予定のモニター装置 . . . . . . . . . . . . . . . . . . . . . . . . . . 194
16.12
衛星姿勢制御で熱環境安定を実現する方法 . . . . . . . . . . . . . . . . 198
16.13
画角サイズ変動がない場合の必要星密度 . . . . . . . . . . . . . . . . . . 200
16.14
画角サイズと個数密度の関係
16.15
QSO 候補天体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
. . . . . . . . . . . 160
. . . . . . . . . . . . . . . . . . . . . . . 171
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
. . . . . . . . . . . . . . . . . . . . . . . 186
. . . . . . . . . . . . . . . . . . . . . . . 190
. . . . . . . . . . . . . . . . . . . . . . . . . . 191
. . . . . . . . . . . . . . . . . . . . . . . 201
10
図目次
A.1
クラス . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
A.2
状態図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
A.3
オブジェクトの階層構造 . . . . . . . . . . . . . . . . . . . . . . . . . . 214
A.4
Composite パターンの例 . . . . . . . . . . . . . . . . . . . . . . . . . . 214
A.5
JASMINE Simulator の仕様決定の流れ。 . . . . . . . . . . . . . . . . 216
A.6
JASMINE Simulator の機能を検討するためのプロトタイプ。
A.7
JASMINE Simulator のクラス図 . . . . . . . . . . . . . . . . . . . . . 221
A.8
状態図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
A.9
JASMINE Simulator の起動画面 . . . . . . . . . . . . . . . . . . . . . 224
A.10
イベント処理機構のクラス図。 . . . . . . . . . . . . . . . . . . . . . . 228
A.11
イベント処理機構の協調図。
A.12
イベント処理機構のシーケンス図 . . . . . . . . . . . . . . . . . . . . . 230
A.13
イベント処理機構のオブジェクト図 . . . . . . . . . . . . . . . . . . . . 231
A.14
座標取り扱いに関するクラス図 . . . . . . . . . . . . . . . . . . . . . . 232
A.15
天体を表すクラス
A.16
FITS に関連するクラス図 . . . . . . . . . . . . . . . . . . . . . . . . . 235
A.17
Simulator バス部のシステムブロック図 . . . . . . . . . . . . . . . . . . 236
A.18
Simulator バス部の UML 図 . . . . . . . . . . . . . . . . . . . . . . . . 238
A.19
制御前の星像イメージ . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
A.20
制御の様子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
A.21
制御後の星像イメージ . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
B.1
Huffmann 木の作り方 . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
B.2
JASMINE Pixel データの主成分 . . . . . . . . . . . . . . . . . . . . . 259
. . . . . 218
. . . . . . . . . . . . . . . . . . . . . . . 229
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
11
表目次
3.1
解析の各手順ごとの誤差要因とその対策 . . . . . . . . . . . . . . . . . .
28
3.2
JASMINE 仕様クイックシート . . . . . . . . . . . . . . . . . . . . . .
31
4.1
Summary of the optical parameters for JASMINE . . . . . . . . . . .
40
4.2
HgCdTe 検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.3
出力トルクと最短時間制御の関係 . . . . . . . . . . . . . . . . . . . . .
46
4.4
蝕を避ける HCPO . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
4.5
熱検討 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
4.6
コンセプト比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
4.7
多層構造各部のサイズ . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.8
その他部位のサイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.9
熱制御材の特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.10
定常熱解析結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
4.11
非定常熱解析条件
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.12
非定常熱解析結果
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.1
理想的な場合の仕様検討表 . . . . . . . . . . . . . . . . . . . . . . . . .
70
5.2
1 撮像における誤差要因 . . . . . . . . . . . . . . . . . . . . . . . . . .
70
5.3
小フレーム構築 (stage1) の誤差要因 . . . . . . . . . . . . . . . . . . . .
71
5.5
大フレーム構築 (stage2) の誤差要因 . . . . . . . . . . . . . . . . . . . .
72
5.4
ひずみ (打ち上げ前の測定値を打ち上げ後にどの程度再現可能であれば
よいか) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
5.6
大フレーム構築 (stage2) の誤差要因 . . . . . . . . . . . . . . . . . . . .
73
5.7
誤差要因と達成値目標値。 . . . . . . . . . . . . . . . . . . . . . . . . .
76
6.1
軌道トレードオフ。JAXA 集中検討資料より必要部分を抜粋。 . . . . .
88
6.2
数値例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
7.1
JASMINE プロジェクトのマイルストーン . . . . . . . . . . . . . . . .
96
7.2
Nano-JASMINE 仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
12.1
星の大気モデルの fundamental parameters
12.2
2 つの星における化学組成比 . . . . . . . . . . . . . . . . . . . . . . . . 127
13.1
位置天文解析ステップの抽象化 . . . . . . . . . . . . . . . . . . . . . . 151
. . . . . . . . . . . . . . . 126
12
表目次
14.1
誤差要因 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
15.1
Lutz Kelker バイアスによる絶対等級の誤差 . . . . . . . . . . . . . . . 179
16.1
光学系変動許容値
16.2
SiC の物性値 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
16.3
鏡素材候補の物性値。[Iye, 2006, 須山章子 et al., 2003] . . . . . . . . . 196
B.1
JASMINE におけるデータ伝送量の制限と必要な通信量 . . . . . . . . . 252
B.2
Huffmann 符号化の例。 . . . . . . . . . . . . . . . . . . . . . . . . . . 256
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
B.3
既存圧縮手法による JASMINE 星像データの圧縮率 . . . . . . . . . . . 257
B.4
Golomb-Rice 符号化と主成分分析を組み合わせた手法での圧縮率 . . . . 260
第I部
総論
15
第1章
序文
世界で唯一の赤外線位置天文観測衛星である JASMINE(ジャスミン)計画を日本でス
タートさせてかれこれ 9 年間がたとうとしている。位置天文観測は星の天球上の位置とそ
の動きを測定する天文学において最も古い分野であり、脈々と続けられてきている人類の
営みである。ただ、地上観測においては、大気ゆらぎや装置の重力変形などの影響もあり、
20 世紀には測定精度に限界がきていた。そのため、分光、測光、高分解イメージなどの他
の観測手段に比べて、天体物理学や宇宙物理学へのインパクトが弱いものになっていた。
ところが、20 世紀の末、ヨーロッパ宇宙機関 (ESA) が世界で初めての位置天文観測衛星
HIPPRCOS(ヒッパルコス)を打ち上げ、地上の観測精度に比べて一桁以上もの精度向上
を果たした。これは、画期的な進展であり、位置天文観測を用いた新たな天文学、天体物
理学の幕開けとなった。ただ残念なことにヒッパルコス衛星の精度は、年周視差では、1
ミリ秒角であり、この精度ではまだ、我々から高々 100pc 以内の星までの距離しか年周
視差で正確に求めることはできていないのである。銀河系全体に比べればはるかに小さい
スケールである。そこで、当然ながら、世界の位置天文コミュニティは、ヒッパルコス衛
星よりもさらに 2 桁も高精度な測定を目指して、あらたな位置天文観測衛星の計画に乗り
だした。ESA は GAIA、NASA は SIM という可視光での位置天文観測衛星計画が進ん
でいる。ところで、日本では、電波干渉計を用いた地上での位置天文観測である VERA
計画が国立天文台を中心として進展し、現在、稼働を行っている。年周視差で測定できる
もっとも遠い天体のレコードまで打ち出しつつある。VERA は、電波であるため、可視
光観測が苦手とする天の川面の観測にも適している。しかし、VERA はメーザー源とな
る天体、約 1000 個に観測が限られている。そこで、もっと多くの星自体、特に、可視光
測定の GAIA や SIM では、十分多数の星を高精度で観測できない、銀河系中心付近のバ
ルジ構造に含まれる多くの星の年周視差や固有運動を手に入れたいが、JASMINE は、ま
さにバルジにターゲットを絞り、バルジに属する多数の星の位置とその変動を測定するこ
とを目標とするミッションである。世界の位置天文コミュニティも GAIA や SIM の補完
となる JASMINE 計画に関してその科学的意義を高く評価し、実現にむけてのサポート
を公式に表明した。
さて、1999 年頃から JASMINE の検討を宇宙科学研究所(当時)の協力を得ながら
国立天文台の有志のメンバーを中心として検討が開始された。その後、京都大学やその
他の大学、さらに宇宙開発事業団(当時)の方達のご協力も徐々に得つつ、検討を進めて
いった。2003 年 7 月には、JASMINE 計画の第一回検討報告書を出版することができ、
多くの皆様にお配りすることができた。その後、宇宙科学研究所の宇宙理学委員会にワー
16
第 1 章 序文
キンググループの設置をお認めいただけるとともに、法人化した国立天文台において、あ
らたに JASMINE 検討室というプロジェクト室が設置され、JASMINE の検討が組織と
して正式に認められた。引き続き JAXA 宇宙科学研究本部や筑波宇宙センターのシステ
ムズエンジニアリング推進室 (SE 推進室)の方達のご協力も得ながら検討、開発を進め
てきた。しかし、JASMINE が当初目標としていた天の川全面のサーベイは大きな望遠鏡
(主鏡口径 1.5m クラス)を必要とし、衛星自体が大きくなる。このため、予算や技術的な
ことを考えたときに、このまま進むのがいいのか、見直しを行うのがいいのかの考慮を迫
られることとなった。JASMINE チームはもとより、各方面の皆様のお考えを参考にし、
2006 年には、オリジナルより小さな衛星に転換し(主鏡口径は 80cm クラス)、サーベイ
する領域をバルジ方向に限るミッション目標への決断を行った。そのため、オリジナルと
も異なる観測手法を考案するに至り、観測装置や衛星システムを見直し、あらたな検討を
開始するに至った。そして、2007 年度からは、国立天文台、京大、JAXA(SE 推進室、総
合技術研究本部)のメンバーを中心として、小型化された JASMINE の集中検討を行っ
た。JASMINE のミッション目標を達成するためには、様々な技術課題が存在し、衛星シ
ステムにも大変厳しい要求を課している。JASMINE の目標を達成できるような衛星シ
ステムは目標の年数で今後作りうるのかどうか、そこに焦点を当てて検討を行った。その
問いに答えるため、つまり実現可能であることを示すためには、まだまだこれからいくつ
もの課題を乗り越え、実証していかなくてはいけないが、1 年間程度行った集中検討の一
つの締めくくりとして、JASMINE ミッションの全容、現在考えている仕様、重要課題の
整理、その課題に対する今後の方向性などをまとめて資料としたものである。なお、この
検討結果をもとに、宇宙理学委員会で、JASMINE ワーキンググループを中型衛星のワー
キンググループとして再定義することを 2008 年 3 月にご審議いただき、お認め頂いた。
JASMINE の実現に向けては、いくつもの課題を乗り越えねばならないが、関係者一
同、益々の精進していく所存であり、今後とも皆様のご協力、ご支援をお願い申し上げる
次第である。
JASMINE Working Group 主査
国立天文台 JASMINE 検討室長
郷田直輝
17
第2章
ミッション概要
2.1 ミッション目標
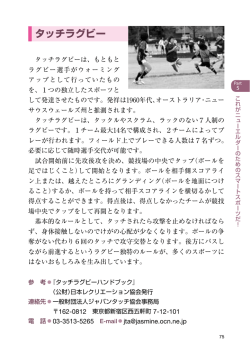
図 2.1 銀河系 (天の川銀河) の全体像とバルジの位置、太陽系の位置の関係。バルジは
銀河系中心のまわりの膨らみを持った部分を指し、差し渡しは約 1 万光年である。太
陽系は銀河系中心から約 2 万 7 千光年離れている。
JASMINE ミッションは、天の川銀河の中心方向にあるバルジ構造 (図 2.1 参照) の領域
(20◦ × 10◦ 領域内)を近赤外線 (K-バンドを含む JASMINE 特有の KW バンドを使用:
中心波長が 2.0µm、バンド領域は、1.5µm から 2.5µm) でサーベイし、我々から 10kpc
以内にある星々の距離や横断速度を高い信頼度で求める。そのために、10 万分の 1 秒角
(10µ 秒角) という高精度で星の年周視差、固有運動、天球上での位置 (用語の意味は、以
下で説明を記述してある)を測定する。高精度(距離を正確に求めるのに必要とされる年
周視差の相対誤差が 10% 以内)で測定できるバルジの星が約 100 万個にものぼる。銀河
系の“核心”をつくバルジのサーベイは、後述するように大きな科学的成果が期待できる。
さて、JASMINE のように星の天球上での位置とその時間変化を観測する天文学の分野
を位置天文学 (アストロメトリ)と呼ぶ。星の位置の時間変動は、地球が太陽の周りを公
転することに由来する見かけの楕円運動(図 2.2 参照)と各々の星が独自に持っている速
度によって天球上を横断していく直線運動*1 の組み合わせとなる。単位時間当たりの横断
*1
加速度成分は非常に小さいので、通常測定不可能で、位置と速度だけが測定可能である。そのため、固有
18
第2章
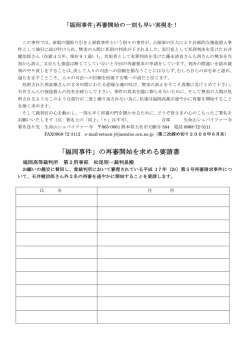
図 2.2
ミッション概要
年周視差は、地球が太陽の周りを公転することによる天球上の星の見かけの楕
円運動の長半径をさす。
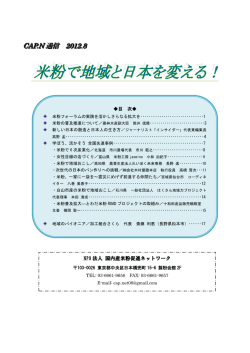
角速度は、固有運動と呼ばれる(図 2.3 参照)。
地球が太陽の周りを公転することに由来する星の見かけの楕円運動の長半径 (角度)は、
年周視差(π:図 2.2 参照) とよばれ、三角測量の原理を用いて、その星までの距離を直接的
に評価できる。つまり、この年周視差を秒角であらわすとき、年周視差が 1 秒角の場合、
星までの距離は 1pc(パーセク)(約 3.26 光年)と定義され、年周視差の逆数が、パーセク
単位での星までの距離を表すこととなる。
さて、星の天球上の位置とは、ある基準時刻での年周楕円の中心の天球上の位置を表す
2 つの座標 (例えば赤経赤緯 (α, δ) あるいは黄経黄緯 (λ, β)) を示す。また、固有運動は、
年周楕円の中心の天球上での速度を表す二つの値、(µα , µδ ) あるいは (µβ , µλ ) で通常示
される。これに、年周視差 π を加えて、以上の 5 つの成分が位置天文パラメータと呼ば
れる。JASMINE では、KW = 11 等級より明るい星に対して、年周視差の精度を 10µas、
固有運動の精度を 4µas/yr、天球上での位置を 10µas で決めることを目標とする (年周視
差の精度が 10µas という目標精度の根拠は、15 章参照。)。
ところで、星の位置の時間変化は、地球の年周運動に伴う楕円運動と固有運動以外の
原因でも起こりうる。例えば、連星系の場合だとか、惑星系をもつ場合などである、さら
に、重力レンズ効果を受ける場合である。逆にこういう運動を検知できれば、連星、惑星
系、重力レンズの物理的情報を得ることができる。
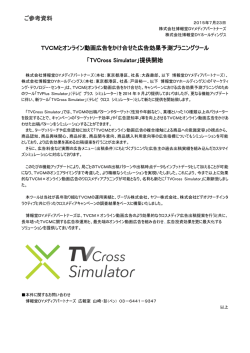
前述したように、JASMINE は、大きな科学的成果が期待でき、銀河系の “核心” をつ
くバルジ領域の位置天文観測を行う(図 2.4 参照)。バルジの構造やバルジ内の天体の研
究を進めるためには、バルジ内の星の距離を、モデルや仮定など無しに直接評価できるこ
とが重要である。ところで、年周視差の観測的相対誤差が 10% を越すといくつかのバイ
アス効果が効き (詳細は 15 章参照)、距離を直接的に求めることが出来なくなる。そこで、
年周視差の相対誤差が 10% 以下になる必要がある。バルジ構造の太陽系から遠い領域は、
約 10kpc 離れているが、これは年周視差で 100µas に対応する。相対誤差が、10% 以下で
運動は、天球上で事実上等速直線運動となる。
2.1 ミッション目標
図 2.3
銀河系内の星の位置, 視線速度,接線速度,固有運動.星までの距離に固有運
動をかけると,実際の接線速度が導き出される.固有運動が図中では大きく描かれてい
るが,実際の大きさはごくわずかである。
図 2.4 JASMINE が観測する方向と高精度で測定できる範囲 (白抜きの三角で示した領域)。
あるためには、年周視差の誤差は 10µas 以下になることが望まれる。さらに、力学構造の
構築や、多くの天体を研究対象とできるためにも、なるべく多くの星を 10µ 秒角以下の
精度で観測ができることが望ましい。そこで、JASMINE では、バルジに属する広い範囲
の 100 万個の星 (バルジのすべての重力物質による位相分布関数の構築に必要な個数)が
少なくとも 10µ 秒角で観測できるように、KW ≤ 11 mag に対して年周視差の誤差が 10µ
秒角以下になる仕様を考えている。
なお、JASMINE では、KW = 14 等までの星の完全なカタログを構築する。JASMINE
が観測するパラメータは天文学の基礎的データとなるため、天文学の広い分野に貢献でき
19
20
第2章
ミッション概要
るミッションである。先行する HIPPARCOS ミッションは、V = 12 等*2 までの 12 万
星のカタログを構築した (V = 10 等までの精度は 1mas)。JASMINE はそれに続くミッ
ションとなる。現在検討中の位置天文観測計画としては、ESA の GAIA、NASA の SIM
*3
が先行している (以上、位置天文観測の発展に関して、11 を参照)。
GAIA は V = 15 等までの星を 20µas で、V = 20 等までの星の完全な全天数億個の星
のカタログを構築することを目標としている。SIM は干渉計を用いることで、目標精度を
4µas と高い精度としているが、干渉計では観測時間がかかることから観測可能な星の数は
約 1 万個に限られる。GAIA および SIM はいずれも可視域の観測であるが、JASMINE
は近赤外線を用いることが特徴である。銀河系バルジ付近はダストが多いため、可視域で
は光が吸収されて、星が暗くなり、精度が出せない。近赤外線を用いることで、吸収が弱
くなる。このため、バルジに属する (20◦ × 10◦ 領域、距離約 2 万光年から 3 万光年) で
σπ /π < 0.1(σπ は π の誤差分散) の星は、GAIA(G バンド) では約 400 個 ([Safa, 2006]
のスペックをもとに [Wainscoat et al., 1992, Cohen, 1992] 銀河モデルに基づいて推定)
だが JASMINE(K バンド) では約 100 万個 ([Wainscoat et al., 1992, Cohen, 1992] 銀
河モデルに基づいて推定) 観測できる。これが、JASMINE のユニークな特徴であり、
大きなメリットでもある。JASMINE のこの意義は、2006 年に開かれた IAU 総会
の JD(Joint Discussion)13 での Tim de Zeeuw による concluding remarks の
中での次の言葉にも表されている。“The Japanese space astrometry plans are
exciting as they focus on an infrared study of the Bulge, which cannot
be reached by Gaia other than in low-extinction windows.(Mem.S.A.It.
Vol.77,1155, 2006.)”
さらに、特筆すべきこととして、2007 年 10 月 15 日∼19 日に上海で行われた
IAU シンポジウム No.248(A Giant Step: From Mill- to Micro-Arcsecond
Astrometry)の SOC により、引き続き進展すべき位置天文分野にとって非常に重要と
考えられ、特に本質的な科学領域として銀河系バルジの赤外線位置天文観測があげられ、
それを実行する JASMINE がこの国際的なメンバーで構成される SOC によって強く
サポートされた。(8.2 章参照)
一般に、位置天文観測には望遠鏡による方法と干渉計*4 による方法がある。JASMINE
では、HIPPARCOS 及び GAIA の方法と同様に長焦点距離の望遠鏡を用いて瞬時瞬時の
星の天球上の位置を観測し、天球上の位置の時間変化から上の 5 つのパラメータを推定
する。しかし、HIPPARCOS や GAIA は大円上をサーベイし、大円上の大角度離れた2
つの視野を同時に観測する手法を採用する。これは、全天サーベイであること、視野に写
る星数が必ずしも多くないことから採用される手法である。一方、JASMINE は、バルジ
方向という限られた領域のサーベイに特化し、また、バルジ方向は非常に多くの星が視野
内に写ることから、フレーム連結法と我々が呼ぶ、スペースでは独自の方法を採用する
(3.1 章参照)。望遠鏡の1視野内に写った星の集団を小フレームと定義し、隣同士の小フ
レームは約半分づつ星が共通に写るように視野を動かしていく。こうして、隣り合った小
フレームを共通に写った星を合わせることにより、連結していく。こうして、サーベイ領
*2
*3
*4
V 等級は可視域に相当し、中心波長 550nm、波長幅 90nm である。
他に、米海軍天文台の OBSS、ロシアの OSIRIS がある。
干渉計のスペースアストロメトリ計画として SIM がある。基線長は 9m である。次世代のスペース光赤
外干渉計へのプリカーサー的な役割を持っている。
2.2 期待される科学的成果
域を小フレームの連結で作成する。このプロセスをミッションライフの間繰り返し、多数
の大フレームを作成していく。大フレームには、異なった時刻の星の位置が写っているた
め、星の位置の変動が分かり、年周視差や固有運動を導出することが可能となる (3.2 章
参照)。
また、バルジに集中したサーベイ観測としての JASMINE の科学的意義を十分に発揮
するため、およびデータ解析の観点から、星の色情報が必要であり、複数のバンドでの測
光用の検出器を 6 個から 12 個並べる。現在測光観測に関してはどのバンドの検出器を何
個並べるのが適当かは、十分検討を行っておらず、今後の課題ではあるが、使用を予定し
ている HgCdTe 検出器は広い感度領域を持っているので、同じ検出器の上でフィルター
を用いることで、J、H バンドなどのバンドでの測光観測を行うことができる。古くはバ
ルジは古い星の集まりと考えられてきたが、近年バルジにも新しい星が多く存在すること
が指摘されている。これらは当然異なる力学的歴史をもつものであるため、測光観測で星
のタイプを同定しつつ位置天文観測で運動パラメータを推定することにより、バルジの力
学史に新たな知見を得ることが期待される。
JASMINE の科学目標、詳細な観測手法、観測装置の仕様、重要な技術課題の整理、そ
の課題に対する今後の対策など以下でまとめてある。
2.2 期待される科学的成果
先ず、JASMINE のようなアストロメトリで行われる星の位置天文情報の科学的意義に
ついて述べる。
星の距離を、モデルや仮定無しに直接的に求めることができるのは、天文学にとって非
常に重要である。星までの距離が分かることによって、星の本当の明るさや放射している
エネルギーの絶対量を知ることができるからである。これは、恒星物理学の進展のみなら
ず、多くの天文学の研究に関わる基本情報である。そのような星の基本情報である星まで
の距離が、アストロメトリによってのみモデルや仮定なしで高精度で求めることができ、
その意義は非常に大きい。JASMINE は、銀河系バルジ内の多くの星 (約 100 万個)の距
離をモデルや仮定無しで求めることができ、その基本情報は天文学、宇宙物理学の多くの
分野の進展に寄与できる。
星の固有運動に視線速度の情報を加味すると、星の 3 次元運動が分かる。これに、アス
トロメトリによって得られる星の 3 次元的位置の情報を加えることにより、星の軌道が分
かる。これは、観測された星の分布や運動が分かるということにみならず、多くの情報を
もたらす。例えば、“天の川銀河の中心付近での暗黒物質や見えていない天体を含むすべ
ての天体の地図と立体的な動きが初めて分かる” ということである。少し詳しく言うと、
暗黒物質やすべての天体が作り出す “重力場” を “見つめる” ことができるのである。こ
れが、いかに画期的であり、また天文学、宇宙物理学にとって重要であるかを以下で説明
する。
宇宙を観測するとき、様々な波長の電磁波を用いる。ご存じのように人間の眼は、太陽
光(表面温度が 6000 度程度であり、その温度の熱源から出てくる電磁波、つまり可視光)
を受けるように最適化されている。しかし、可視光がすべての天体や天体現象の観測に適
しているわけではない。低い温度の星や、低温状態での天体現象を観測するときには、そ
のエネルギーに見合った赤外線や電波が向く。一方、高温な星や高エネルギー現象を観測
21
22
第2章
ミッション概要
するときには、X 線やガンマ線による観測が適している。つまり、銀河系や宇宙を観測す
るに当たって、どれか一つの波長帯で観測すればいいのではなくて、多くの波長帯での観
測情報が全体を理解する上で重要である。しかしながら、電磁波で観測できない物質、ま
たは原理的には観測可能だが暗すぎて実際の観測では受からない天体も含めて、すべての
物質の像を直接 “見る”ことは、不可能である。しかし、すべての物質の情報がなければ、
宇宙を知る上で不完全である。例えば、銀河の本当の形やサイズも分からない。つまり、
何らかの方法で “すべての物質” の情報を知ることが基本的かつ必要不可欠である。しか
も、星の温度や天体の状態に依らずに見ることができることが必要である。それが可能と
なる唯一の方法は、物質が作り出す重力場を知ることである。すべての物質は質量をも
つ。質量があれば重力を作り出す。つまり、重力場の情報には、そこに含まれる物質の情
報が含まれているのである。
では、どうやって重力場の情報が分かるのか?重力場により、星の軌道は決まる。逆に
言うと、星の軌道情報があれば、重力場を知ることができる。しかし、一つの星の位置と
運動が分かればユニークに重力場が決まるわけではなく、なるべく多数の軌道情報が必要
となる (詳細は 12.4 章参照)。それゆえに、星の位置や速度を知ることが重要であり、そ
のような測定を行うのがまさに位置天文学(アストロメトリ)である。人類は、アストロ
メトリの “眼” を手にすることにより、はじめて、重力を作り出すすべての物質が織りな
す天体構造の実態を掴むことが可能となるのである。アストロメトリは、星までの距離と
天球上の位置を測定することにより、星の立体的な場所を決めることができる。さらに、
固有運動(2.1 章参照) と距離から視線方向に垂直方向の速度、つまり天球上の横断速度が
分かる。これに視線速度の情報を加えれば、3次元速度が分かる。以上の星の軌道情報が
多くの星に対して分かれば、電磁波では見えない暗黒物質(ダークマター)や暗すぎて見
えない天体を含むすべての物質が作り出す重力場(重力ポテンシャルの場)が分かる。さ
らに、そのようなすべての物質に対する軌道構造も知ることが可能となる (12.4 章参照)。
文字通り、形や大きさといった配置構造、さらには運動状態も分かる。これらの力学構造
を知ること自体も物理的に興味深いものであるが (詳細は 12.3 章参照)、力学構造にはそ
の天体の進化の歴史も刻まれている(12.1 章と 12.2 章参照)。例えば、天の川銀河の力
学構造には、天の川銀河の形成、進化の情報も含まれている可能性があり、力学構造は形
成・進化の解明にも重要であると言えよう。
以上、アストロメトリの “眼” は、他の天文観測ではうかがい知ることができない、ダー
クマターも含む物質が作り出す重力場を知ることができ、それにともなって、物質が織り
なす真の構造、そして物質の立体的な動きまで “見る” ことができる。これは、星の距離
と速度を測るアストロメトリだけがなしえる技であり、アストロメトリの重要性の一つで
ある。
さらに、星の位置の時間変化が、地球公転に伴う楕円運動と固有運動との組み合わせ運
動からのずれが検知できれば、連星系、惑星系、重力レンズの物理的情報を得ることがで
きる。これらも、高精度なアストロメトリではじめて可能となる興味深い、期待できる科
学的成果である。
さて、JASMINE の観測対象は、天の川銀河(銀河系)のバルジと呼ばれる銀河系中心
付近に存在する構造である (図 2.1 参照)。先ず、なぜ天の川銀河(銀河系)を対象とする
のか、その意義について説明する。
他の銀河に比べて、銀河系内は当然ながら圧倒的に距離が近く、銀河系は、もっとも詳
2.2 期待される科学的成果
23
細かつ精密に調べることができる銀河である。また、多種多様な天体や銀河系中心に巨大
ブッラクホールも存在し、様々な天体現象も起こる。まさに、銀河系は天文学、天体物理
学の精密測定ができる一大実験室となりうる。銀河系研究は、このような何事にも代え難
い魅力がある。さらに、銀河系は典型的な渦巻き銀河であり、銀河系の研究成果はテンプ
レートとして、系外銀河の解析に大いに活かすことができる。これも銀河系を研究する大
きな意義である。
しかしながら、位置天文測定で今までの最高精度を出している HIPPARCOS 衛星によ
る観測データでさえ、太陽系から高々 100pc(約 326 光年)以内しか、年周視差による直
接的な距離測定で信頼できる値を出すことができていないのである。この範囲は、銀河系
全体にははるかに及ばない。
図 2.5 JASMINE のサーベイ領域
そこで、JASMINE では、銀河系の“核心”をつくため、バルジ方向のみ (20◦ × 10◦ )
のサーベイに特化し、バルジ構造のもっとも遠方である 10kpc の距離 (年周視差で 100 マ
イクロ秒角)までも高精度で距離を評価できるように、年周視差の誤差が、視差の 10%、
つまり 10 万分の 1 秒角 (10 マイクロ秒角)の精度達成を目標とする。目標が達成される
と、バルジに属する星に対して高精度で年周視差が測定可能な星の数は、GAIA より約3
桁も多くなる(バルジに属する星のうち、年周視差を誤差が 10% 以内で測定できる星の
数は JASMINE が約 100 万個であるのに対して、GAIA は 400 個程度である)。ここに、
海外の位置天文観測衛星に比べての JASMINE の優位性がある。
一方、バルジにある星々の高精度な位置天文情報を得ることは様々な観点から非常に重
要であり、科学目標としてバルジ方向のサーベイに特化することは意義がある。バルジに
関しては、以下で述べるように多くの有用な情報を含むと考えられているが、その力学
構造、形成、進化に関してはほとんど解決されていない。むしろ、最近の観測結果によれ
ば、今までのイメージとは異なっている様相もある。従って、今までにはない精度の高い
大量の観測情報をもとに(新しい性質、または統計的傾向が見つかる)、一から虚心坦懐
に、バルジを見つめ直す必要が出てきている。
バルジの研究が有用な理由としては、例えばバルジは、楕円銀河との類似点もあり、バ
ルジの力学構造(ダークマターも含むすべての重力物質の位相分布関数)の解明は楕円銀
河の力学構造の解明にもつながる。また、バルジは多種多様な星が密集しており、銀河系
24
第2章
ミッション概要
の形成史の痕跡を多く残している可能性も高い (12.1 参照)。バルジは単に古い星のみな
らず最近も星形成が行われていることが示唆され、バルジは“成長”’をしている。バル
ジの成長は、円盤銀河から楕円銀河への進化等とも関わり、そのメカニズムを究明するこ
とは銀河の形態進化の解明にとっても重要である。標準的な銀河形成モデルによれば、矮
小銀河が衝突合体し、バルジに落ち込んでいる可能性もあり、それがバルジの成長や星形
成の原因となっているとも考えられるが、まだ確認はされていない。
図 2.6
左図は、銀河系バルジの模式図: バー構造をしていると考えられており、周辺
の銀河系円盤部からバー構造によってガスが流入してくると考えられている。バルジ
のサイズは、1kpc から 4kpc 程度と考えられている。右図は、銀河系中心部を拡大し
た模式図:銀河系中心には巨大ブラックホール (SgrA*) が存在する。そのまわりに、
SgrB や SgrC などの X 線反射星雲、内部バーやリング状の分子雲などが存在する。
さらに、銀河系中心において、その存在が明らかになりつつある巨大ブラックホールの
成長とバルジの構造、成長とは密着した関係にあると考えられている (12.2 参照)。巨大
ブラックホールは、銀河系活動の根源であり、過去に大爆発していた形跡も発見されてい
る。また、最近も小規模ながら爆発を起こしている形跡もみつかりつつあり、銀河系や系
外銀河の活動性を探る上でも銀河系中心の巨大ブラックホールとそれを包む銀河系バルジ
を解析することが非常に重要である。
また、バルジにある多様な星々の形成・進化のメカニズムを明らかにすることにより、
バルジの化学組成とその進化 (12.5 参照)、恒星物理学、星形成のモデルの構築、検証
(12.6 参照)を行うことができる。
このように科学目標としてバルジの解析は、宇宙初期での銀河形成・進化のモデル、銀
河の活動性と巨大ブラックホールの成長、星形成・進化モデルの検証のための“実験場”
としても非常に重要であるが、その際に必要不可欠な情報がバルジ内の星々までの距離や
運動速度である。もちろん、視線速度や金属量も重要な情報であり、それらの量は他の観
測によって得る必要があるが、距離や横断速度を高い信頼度で提供できるのは、近赤外線
でバルジ方向のサーベイを行い、距離や横断速度を高い信頼度で導出するに当たって必要
な 10 μ秒角の精度で多数の星の位置天文測定できる JASMINE が世界で唯一のものであ
り、ハローや近傍円盤部の位置天文情報を高精度で提供できる GAIA や SIM と銀河系全
体の解明に対しては相補的なものとなる。この点に JASMINE 計画の大きな意義がある。
さらに、JASMINE の新しいバージョンでは、同じ天体を約 1 日間隔に観測していく。一
方、GAIA などは、一ヶ月に一度の割合である。つまり、時間分解能で JASMINE は優
れており、連星系や惑星系 (12.7 参照)
、ならびに重力レンズの観測 (12.8 参照)にとって
も優位である。
25
第3章
解析手法
3.1 観測手法
3.1.1 位置天文の精度のスケール則
本章では、JASMINE の基本仕様と解析手法について述べる。まず、本サブセクション
で理想的な観測によって得られる精度を評価し、小型の装置で観測可能なミッションを定
義するためにどのような要素が必要かを考察する。次に解析手法の概要を、3.2 章で解析
の各段階で何を行うかについて記述し、14.2 章でランダム誤差がミッションに与える効果
とその対処方法について述べる。実際のミッションにおけるランダム誤差と系統誤差の分
類と対処方法については、5 章で記述する。
理想的な (Photon noise limit での) 観測で得られる位置天文パラメータの精度 σpnl は、
口径を D 、観測に割く事ができる総時間を T (衛星システムを安定させる時間や装置の調
整に必要な時間などを含まない、真に観測データを取得するための総時間を指す)、視野
の広さを ΩFOV 、本ミッションで観測する領域を Ωmisshon 、フィルターの幅を ∆λ/λ、光
学系と検出器を併せた総効率を ϵtot で表すと、
(
)−4 (
)−1 (
)−1 (
)(
)2
D
T
ΩFOV
Ωmission
λ
80cm
0.26yr
0.98◦ × 0.98◦
20◦ × 10◦
2µm
(
)−1 (
)
∆λ/λ
ϵtot −1
(3.1)
0.5
0.7
2
σpnl
= (10µas)
2
式 (3.1) で表される。この式から分かるように、ミッションで観測する領域を狭くするこ
とも精度を向上する効果がある。JASMINE はバルジを中心とする観測ミッションであ
るため、出来る限りバルジ領域に限定して観測することは、より小型の装置でミッション
を成功させるために重要である。
3.1.2 観測方法・基本仕様
JASMINE をはじめとする位置天文のミッションは、高精度化している。これを達成す
る技術レベルは非常に高度なものとなっており、どのようなトレードオフを行い、どのよ
うなシステム要求を検討すればよいかを考えることが、非常に困難になり始めている。そ
こで、JASMINE では抽象的な意味でのミッションの要求の抽出 (要求分析) を行うとこ
ろから始めて、JASMINE に適した観測手法に基づいたシステム要求を考える試みを行っ
てきた。要求を抽出する作業は非常に難しいが、要求をちゃんと分析せずに仕様から議論
26
第3章
解析手法
図 3.1 JASMINE で行うフレーム連結の概要。観測は、上図のように銀河系中心付近
を約 1◦ 平方程度の視野で行う。このようにして得られた複数のパッチ (中左図、小フ
レームと呼ぶ) から、共通に写っている星は同じ位置にあることをよりどころに、連続
な全体図 (中右図、大フレームと呼ぶ) を再構築する手法。さらに、年周楕円運動と画
角サイズの拡大縮小を分離するため、QSO を観測する。JASMINE 解析の後段では、
こうして得た大フレームを複数毎張り合わせて (下図) 位置天文パラメータを解析する。
(矢野氏図)
をはじめると、システムの最適化に制約がかかってしまい、実現困難なミッションになっ
てしまう。そのため、このような高精度ミッションでは、抽象的なレベルでの要求の分析
は非常に重要である。この章では、そこで得られた結果のみを紹介する。分析の詳細は、
13 章を参照。
まず、JASMINE の観測原理を以下に記述する (詳細は 14.2 章参照)。
JASMINE で用いる望遠鏡は、長焦点距離 (14.4m, F 値は 18)・広視野 (1◦ × 1◦ ) が特
徴である。長焦点距離であるため、星を焦点面上の半径にして 2.2 pixel に広がった像と
して撮像でき、このため星像中心位置をサブピクセル精度 (1/309 pixel 程度) で決めるこ
とが出来る。pixel on the sky が 286mas であるのに対し、一回の撮像 (約 2.24 秒 ) で
3.1 観測手法
の星像中心決定精度は photon noise limit では約 1mas となる。JASMINE では、同じ
視野での撮像を 8 回繰り返すことで、0.5mas 程度の星像中心精度を得る。これを、
「小フ
レーム」と呼ぶ。*1 なお、一部の検出器にはフィルターを掛けることにより、測光観測を
同時に行う。
JASMINE の望遠鏡は広視野であるとはいえ、小フレームのサイズは観測領域のサイ
ズ (20◦ × 10◦ ) に比べると狭い。観測領域全体のマップを作るには、この小フレームを精
度良く結合する必要がある。銀河系バルジ付近の星が密集した領域での撮像であること
と、広視野の望遠鏡をつかうことにより、視野の中に約 1 万個 (KW ≤ 11mag、2µm 程
度では 11 等より若干暗い星が必要) 程度の星が入ってくる。従って、例えば小フレーム
の領域の長さ半分程度が重複している隣接四つの小フレームでは、2400 個弱の星が共通
して写っている。十分短い時間の間にはこの星が動かないことを利用すれば、小フレーム
を精度良く結合することが出来る。約半視野ずつずれた視野を用意すると、約 1000 視野
で観測領域全体を覆うことが出来る。実際には、同じ視野を 8 回ずつ観測しながら隣の
視野に移って行くという観測手法をとる。これは、隣の視野に移動する時に姿勢安定を達
成するのに時間がかかるため、この時間が総ミッション時間中の観測可能時間の比率を短
くする効果を小さく抑えるとともに、長時間の露出では衛星姿勢に対する要求が厳しくな
るので、短時間露出を繰返し行なうことで衛星姿勢に対する要求を緩和することの目的を
持つ。短時間 (約 10 時間) の、観測領域全体をカバーする小フレームの集まりを、「大フ
レーム」と呼ぶ (16.3.3 章参照)。大フレームでは、各星は約 4 つの小フレームに含まれて
おり、小フレーム同士を結合することによる誤差を考慮しても、0.32mas 程度の精度で領
域全体の地図を描くことが出来ることになる。
この「大フレーム」の観測を、ミッション期間中連続して行う。統計的にミッション目
標に到達するためには、このような「大フレーム」を 3000 個程度重ね合わせればよい。
「大フレーム」同士の張り合わせには、星の運動パラメータや衛星の姿勢などのパラメー
タを考慮する。
3.1.3 JASMINE の解析手法
JASMINE 自体の解析は次の 4 段階に分けられる。
1. 一つの観測視野 (小フレーム) 内で、星の相対距離を 0.5mas 程度の精度で求める。
2. 小フレームを結合し、広視野かつ短時間 (大フレーム) での星の相対距離を 0.32mas
程度の精度で求める。
3. ミッション期間内の約 3000 大フレームを結合し、絶対年周視差を 10µas で求める。
4. 外部参照天体を用いて、絶対固有運動と絶対座標を決めて、JASMINE 座標系を
ICRS 基準座標系に結合する。
ここでは、それぞれの段階での解析手法について述べる。
*1
JASMINE の現仕様のように単一望遠鏡を用いた観測では、「フレーム」と「視野」は区別しない。
HIPPARCOS のようにビーム混合鏡を用いる場合は、混合鏡が向くそれぞれの「視野」が混合鏡を通じ
て一つの焦点面に結ぶ像を「フレーム」と呼び、この二つを区別する。
27
28
第3章
概要
小フレーム内星像
中心間距離導出
⇒
2.24 秒
手順
系統誤差と対策
フォトン重心を用
検出器 flat(モデル
いて星像の有限性
お よ び pixel の 離
⇒
↓
ランダム誤差と対策
星像ボケ
(1) 光 学 系 の ず れ
(アクチュエータで
調節、2µm、OK)
(2) 姿勢安定
化で補正)
宇 宙 線 (複 数 枚 撮
像で補正)
散化の誤差を補正
↓
解析手法
↓
小フレーム毎の歪
み、サイズ変動 (モ
重複領域の星の位
ニター、モデル化、
重要事項)
連 結 (重 複 領 域 の
衛星位置 (150km,
星の数はバルジな
小フレーム毎のサ
OK)
ので OK)
イズと歪の変動を
衛
補正し連結。
(1.5mm/s, OK)
相対論補正 (OK)
置情報をもとに連
大フレーム内の星
の角距離導出
隣接小フレームの
⇒
約 10 時間
↓
⇒
結。
星
速
度
↓
↓
大フレームの共通
基準点の見積も
絶対年周視差、絶対
固有運動導出
大フレームの共通
⇒
≥ 1.5 年
の 基 準 点・長 さ ス
⇒
ケールの導出、
星の運動のモデル
り (バ ル ジ な の で
OK)
化により補正可
大フレーム毎の拡
大縮小の見積り
(QSO を基準とし
て OK)
↓
↓
座標系の照合
⇒
VERA,
GAIA,
SIM などで観測さ
れ た 天 体 、ICRF
↓
⇒
他ミッションの観
測誤差
天体とリンク
表 3.1
解析の各手順ごとの誤差要因とその対策。ランダム誤差は V 値で表現できる
もので、明るい星については達成、目標等級を変えなければ口径を増やしたりミッショ
ン時間を増やすなどの解決もある。
3.1.4 第一段:小フレーム内の星の相対位置導出
望遠鏡で撮像した一枚の画像を「小フレーム」と呼ぶ。この段階では、単一望遠鏡で視
野角 1◦ × 1◦ の小フレームを、2.24 秒で撮像する。この時、小フレーム内の各星像同士の
中心位置の距離を精密に求める。このため、重心法 (16.1.3 参照) を用いることで、星像
領域が有限であること及び星像が pixel で離散化されていることにより発生する、各 pixel
の光子数の算術的な重心と実際の PSF の中心のずれを補正する。
より良質の画像データを得ることは、後段の解析精度を向上させる。そのため、焦点距
離を最適に調節することにより良像を得る他、光学系の変動を抑えるかモニター装置でモ
ニターする。また、色による PSF 形状の違いや装置変動による PSF 形状の変動は、PSF
形状を解析するか重心法にパラメータを導入することで補正される。検出器の伸び縮みも
画像サイズを変動させるため、読み出し量を常に一定に保つようにして検出器を流れる電
流を一定とし検出器の伸び縮みを最小限に抑え、かつモニターする。より高次の小フレー
3.1 観測手法
ム内座標の歪みは、解析により取り除かれる (実験で検証済み)。こうして得られた星像中
心座標のセットには、各小フレームの中心位置と回転の不定性が残っており、次の「張り
合わせ」で最適化されることになる。
11 等級の星の星像には 2.24 秒間の露出で約 10 万個の光子が含まれる。小フレームは
8 回撮像の合計で決められるので、統計的には回折限界に対して約 1/900 (1mas 以下) の
精度で中心を決定できることとなる。一つの小フレームの中に、11 等級以上の星は約 1
万個撮像される。従って、星像中心同士の距離が短時間で変化しないことを利用すれば、
星の色による星像中心位置の補正パラメータ、distortion に代表されるフレームの変形パ
ラメータの推定も、数十程度 (2500 に比べて十分小さい数の) のパラメータ数なら精度を
ほぼ犠牲にすること無しに推定可能となる。
3.1.5 第二段:大フレーム構築
科学的対象の観測領域である 20◦ × 10◦ を「大フレーム」と呼ぶ。この段階では、撮像
された小フレームですき間無く半フレームづつ重複させながら、約 10 時間で大フレーム
領域を覆い尽くすように観測を行なって行く。小フレーム同士は、重複した領域の星を頼
りに無矛盾に連結させる。連結に必要な精度に応じて十分な数の星があれば、系統誤差を
要求した精度で補正できた場合は、大フレームを目標精度で構築できる。
大フレームの構築にあたっては、小フレーム毎にその画角サイズや歪みパラメータが変
動すると、連結精度が確保できず、誤差が入る。これは、モデル化誤差という意味で系統
誤差に分類される。この誤差を目標値以内に抑えることが出来るかどうかが、大フレーム
構築を成功させる鍵となる。そこで、小フレームのずれに対しては、16.2.1 章に書かれた
ようなモデル化を行なう。
小フレームを張り合わせて大フレームを構築する際、各小フレームの位置と方向、小
フレームの画角や歪みの変動といったパラメータが考えられる。検出器や望遠鏡起源の
画角や歪みの変動をモニターし、大フレームを構築する約 10 時間の間の変動は既知とす
る。位置と方向については、星が十分多数あれば十分な精度で解くことが出来る。一つの
小フレームの中に、11 等級以上の星は約 1 万個撮像される。小フレームの縦横それぞれ
半分程度を重ねて撮像すれば、2400 個強の星が同時に撮像されることとなるため、小フ
レーム同士の位置は星像中心決定精度に比べて 1/40 以上の精度で推定可能である。実際
には、1◦ の視野を 44 枚張り合わせて約 20 度の領域をカバーするため、誤差が蓄積する。
後に、誤差の蓄積を更正し、絶対基準と結びつけるため、各大フレームごとに観測領域
内にある K=15mag もしくはそれより明るい QSO を 4 個(もしくはそれ以上)撮像す
る。すなわち、大フレーム作成時、観測する QSO を含む小フレーム撮像時には、2.24 秒
8 回の撮像に加えて、基準となる 11 等より 4 等暗い QSO をターゲットにしているので、
40 倍の撮像時間をとる。
この段階の解析が終了した後、張り合わせ後の共通原点・回転・スケール、およびその
時間一次の変動の自由度が残る。
29
30
第3章
解析手法
3.1.6 第三段:位置天文パラメータ構築
第一段及び第二段の手続きをミッション期間中続けることで、大約 3000 枚作成する。
これらを、星の位置天文パラメータの導出と同時に時間的に無矛盾に張り合わせるのが、
第三段の手続きである (16.3.1 章参照)。大フレーム構築時間より長時間の変動成分は、こ
の張り合わせ精度を低下させる。ここでは、画角サイズや位置の長時間での変動と星の運
動を自身のデータから解くため、大フレーム作成時に同時に撮像された QSO のデータを
用いる (16.3.3 参照)。これにより、JASMINE では原点・回転・スケールおよびその時間
一次変動成分を含めて無矛盾な座標系を構築できる。
大フレームを 3000 個張り合わせることで、星の位置に関して約 55 倍の精度向上が期
待される。従って、photon noise limit では 2.6µas での位置推定が可能である。
3.1.7 第四段:標準座標系との照合
第四段は、JASMINE で得られた無矛盾な座標系を標準座標系に照合する段階である。
これは、ICRF 天体もしくは、GAIA、VERA、SIM など今後計画されている観測が成
功していれば、それらとの共通の天体と結びつける事により、ICRS 準拠の座標系に結び
付けられる。
3.1 観測手法
31
3.1.8 仕様概要
全般
10µas
目標精度
1.5 ∼ 2.5µm
波長
11 mag
目標等級
20◦ × 10◦
目標観測領域
光学系
80cm
口径
14.4m
焦点距離
F値
検出器
18
pixel サイズ
20µm
2048 × 2048
ピクセル数
4.096cm × 4.096cm
検出器サイズ
pixel on the sky
285mas
◦
0.163 × 0.163◦
検出器 on the sky
150, 000
ポテンシャルウェル
検出器 + 光学系
総効率
焦点面
焦点面検出器個数
6 × 6 = 36
焦点面 on the sky
0.98◦ × 0.98◦
1 小フレーム作成
0.7
saturate 等級
9 mag
1 回撮像時間
2.24 秒
1 小フレーム誤差 (光子数統計)
検出器上の 1 フレーム誤差
約 290µas
1/309 pixel
−
Readout ノイズ (18e )、姿勢擾乱を考慮
474µas
した 1 フレームの星像中心決定誤差
1 大フレーム作成
22 × 44
縦横連結フレーム枚数
20◦ × 10◦
観測領域
1 枚の大フレーム観測時間
約 10.4 時間
大フレーム精度 (光子数統計)
237µas
Readout ノイズ、姿勢擾乱、連結精度を
320µas
考慮した大フレーム精度
パラメータの導出
大フレーム必要枚数
3000 枚
総ミッション時間
約 4.7yr
表 3.2 JASMINE 仕様の概要。
JASMINE の仕様は、表 3.2 にまとめたとおりである。JASMINE は、口径 D = 80cm
の長焦点距離望遠鏡により星の位置と運動を正確に測定するミッションであり、ミッ
ション部は望遠鏡と焦点面に 36 個配列したアレイ検出器からなる。望遠鏡部分はおよそ
1200mm × 1200mm × 2000mm 程度のサイズとなる。望遠鏡を含む光学系の質量は、素
材にもよるが数十 kg から 300kg 程度、これに太陽からの輻射を避けるための遮蔽板持つ
構造となる。以下、ミッションに critical な点から順に、スペックを示す。
32
第3章
解析手法
3.2 位置天文パラメータ導出のための解析手法
データ解析は、次の 4 ステップで行う。
1. 小フレームを構成する 8 枚の撮像データから視野内の星の相対位置を解く (centroiding)
2. 短時間では星が動かないことを利用して、視野の位置を推定し、大フレームを無矛
盾に構築し、瞬時の星の位置を解く。
3. 複数の大フレームから、大フレームの位置と伸び縮みを推定パラメータに含め、星
の位置天文パラメータを解く。位置と伸び縮みの推定には、QSO をたよりにする。
4. QSO などの基準天体をもとに、ICRS などの基準座標と照合する。
各段で実際どのような手順で解析を行うかは、3.1 章に記述されている。
この解析では、以下の誤差要因があり、これらを正確に把握する必要がある。各段での
要求を明確にするため、この章では第 4 ステップから第 1 ステップへの順番で、誤差要因
をまとめることにする。
3.2.1 JASMINE フレームと標準座標系の照合するステップ
このステップが、JASMINE のデータから作られるカタログの絶対精度を決めることに
なる。しかしながら、約 15 年後になるカタログ出版時期にどのような標準座標が採用さ
れているかは現段階で予想できないので、この段階での誤差評価はここでは割愛する。
3.2.2 大フレームを結合して位置天文パラメータを導出するステップ
このステップの目的
10µas より精度の良い位置天文パラメータを得るため、全体に無矛盾な 10µas 精度
の時間空間座標系を構築する。
各大フレームの原点の位置、座標の向きのほか、絶対長さ尺度も不定であるとして、以下
の観測方程式
(
x + µx,i t + πi sin ωtj
(1 + δj ) i
yi + µy,i t + πi cos ωtj
)
( ) (
a
cos θj
− j =
bj
− sin θj
sin θj
cos θj
)(
ξij
ηij
)
(3.2)
を解く。ここで、i は星の index, xi , yi は星 i の基準時刻での位置、µx,i , µy,i は星 i の固
有運動、πi は星 i の固有運動、j は大フレームの index、aj , bj は大フレームの原点の位
置、θj は大フレームの向き、δj は大フレームの長さスケールの補正を表す。大フレーム
内の星の位置 (Step 2 の結果) は ξij , ηij で表わされている。
300
µas ∼ 5.5µas
3000
程度の精度でパラメータが推定できる。parallax factor を考慮して、7.7µas 程度の精度
統計的には、約 3000 の大フレームは 300µas 程度で観測されており、√
が必要であるため、システム誤差を 5µas 以下に押さえれば、各大フレームの位置誤差は
√
7.5µas =
2
2
σrandom
+ σsystematic
程度が期待され、位置天文パラメータを目標の 10µas
で導出することができる。ただし、ここのステップでの統計的議論は、銀河モデルから導
出される星がすべて観測方程式 (3.2) で使うことができる星であることを仮定している。
3.2 位置天文パラメータ導出のための解析手法
33
しかし、実際には連星や重力レンズ効果を強く受けている星などは、この式が仮定してい
る運動をしないため、「単一星」が十分な比率で存在するかどうかは確認する必要がある。
通常の星だけを頼りにすれば、aj , bj , δj について時間に線形および年周期の変動と、固
有運動および年周視差のゼロ点を分離することはできない。これらの変動を分離する方法
として、以下のような方法が提案されている。
普遍的事実を用いる
HIPPARCOS では、大円を周回するように観測を行い、一周が
◦
360 であるという普遍的事実をよりどころに、長さスケールを校正することが試
みられた。しかし、JASMINE のような限定された部分観測では、一周が 360◦ で
あるである事実を使うことはできない。同様に、大角度 θ 離れた領域で、目標精度
σ に対して σ sin θ 程度の精度で校正された観測が行えれば、この縮退を解くこと
ができる。
装置を校正する
一年スケールで機器の校正が可能であれば、その結果を用いて年周期、
時間に線形な変動などを校正できる。しかし、実際的に機器を 1 年スケールの長時
間にわたって校正することは、不可能である。
既知の天体を用いる
位置天文パラメータが既知の天体の運動を制約条件すれば、構成が
可能である。JASMINE では、サーベイ領域には QSO が約 4 個観測される予定で
あり、QSO が π = 0、µ = 0 であることを制約条件として、この両者を分離する
計画である。
2 番目の方法は技術的に困難であり、残る 1 番目と 3 番目の方法をトレードオフした結
果、JASMINE では 3 番目の方法を採用することとしている。
もし、大フレーム内の座標の等間隔性が保障されていない場合、不等間隔性の線形にあ
るいは年周期での変動は、年周視差や固有運動と縮退して解くことができない。そこで、
大フレーム内の座標が正しく等間隔に振られていることが、このステップで正しい位置天
文パラメータを導出する条件となる。
このステップの要求
各大フレーム内の座標は、どこでも 10µas 精度で等間隔であるよう校正されている。
3.2.3 小フレームを結合して大フレームを構築するステップ
前のステップでの要求は、このステップの目的となる。
このステップの目的
各大フレーム内の座標は、どこでも 10µas 精度で等間隔であるよう校正されている。
このステップは、高速度星や太陽系内天体などを除く通常の星が止まっていると考えてよ
い約 10 時間の間で、大フレーム領域での星の相対位置を正確に導くステップである。小
フレームのプレートモデルとして直交モデルを用いると
( )
(
) X
ξ
a b c
Y
=
η ij
d e f j
1
(
) (
) i
a b
cos θ
sin θ
=
d e
− sin θ cos θ
(3.3)
(3.4)
34
第3章
解析手法
の観測方程式を解くことになる。ここで、i は星の index、j は小フレームの index、c, f, θ
は小フレームのパラメータ、X, Y は星の位置、ξ, η は小フレーム内の星の位置 (Step 1 の
結果) である。もし、式 (3.4) の制約がなく、式 (3.3) の a, b, c, d, e, f がすべて自由に変
わりえるパラメータであるとすると (affine model)、情報量が不足するため、観測方程式
(3.3) からこれらのパラメータを解くにはより大きな鏡を用いるか、ミッション期間を長
くするなどの方法をとる必要があり、現在の 80cm 主鏡、5 年ミッションの制約の中では
解くことができない。したがって、星の観測結果に頼らない他の方法で像面の長さ変動を
推定するか、像面の変形を抑える必要がある。
JASMINE ではフレーム連結により小フレームから大フレームを構築している。一般
的には、フレーム連結では誤差が蓄積する。HIPPARCOS では、ビーム混合鏡を用いて
大角度離れた領域を同時に観測することで、この誤差の蓄積を抑えた (詳細は 16.2.1 章、
図 16.1)。しかし、バルジ領域という特殊な条件下では、星の密度が高いため、フレーム
連結による誤差は蓄積しない。そこで、このステップの要求は、プレートモデルが「直交
モデル」であることを正当化するための要求となる。すなわち、大フレーム構築中の 10
時間程度の時間の間で、小フレームのサイズの変動や像面の歪み変形が起こらないことを
保証する必要がある。具体的には、以下のような方法が提案された。
同時に距離指標を撮像する
レーザー光源などで、焦点面上に観測と同時に距離一定の点
像を撮像し、この像のイメージ上の距離の変化から撮像イメージの変形を推定す
る。あるいは、鏡面上に grating grid を切って、干渉パターンを同時に撮像する。
PSF 形状の推定 主鏡の両端の長さを正確に一定にすれば、PSF 角サイズは変化しない。
したがって、これを基準にすれば、検出器・望遠鏡など装置の変形に伴う画像変動
をすべてまとめて推定することが可能かもしれない。
いずれもアイディアの段階で、詳細な検討は行っていない。
具体的には、3.5◦ 程度の長さスケールで 5µas 程度に変形を抑えたい。ここで、3.5◦ と
いうのは以下のような根拠に基づく。今、サーベイ領域に nq = 4 個の QSO があるとす
√
A
で与えら
nq
れる。 両端が固定された変形の場合、中央付近が最も変動が大きく、従って ℓ/2 程度の
◦
◦
る。このとき、サーベイ領域 A = 20 × 10 での平均 QSO 間隔は、ℓ =
長さスケールで、変形を押さえれば良いことになる。
像面のサイズや変形を起こし得る要因としては、熱的・構造的な望遠鏡の変形のほか、
衛星の位置や速度の推定誤差に伴う視点のずれや光行差の推定誤差、太陽系内天体による
相対論効果の光の曲がりの推定誤差、検出器自身の伸び縮みなどが考えられ、これらすべ
てを適切に排除する必要がある。
光行差
10µas を達成するために、衛星の移動に伴う見かけの位置の変動の誤差をその 10% 程
度に抑えるとすると、光行差を 1µas 程度にする必要がある。光速度が約 3 × 108 m/s で
あることから、衛星の速度を 1.5mm/s で推定する必要がある。
3.2 位置天文パラメータ導出のための解析手法
35
*GAIA: 同様。数年以内に 0.1mm/sec より良い精度が現実のものとなると書かれている
[Perryman et al., 2001]。
衛星の位置
衛星の位置の変化に伴う星の見かけの位置の変化が知られている必要がある。誤差を
10µas に対して 10% という制約を課すと、位置決定精度に対する要求値はおよそ 150km
となる。これは、後から軌道解析で分かればよく、リアルタイムで分かっている必要はな
い。既存の衛星では 1km 程度の位置決定精度があるので、十分達成している。
相対論効果
木星などの巨大惑星や、太陽の場合は太陽近傍だけでなく太陽から十分大きな角度離れ
た領域でも、10µas 精度では、相対性理論に基づく光線のゆがみの効果が影響する。これ
らを補正する必要があり、弘前大学の浅田氏の協力のものと、定式化と解析手法の構築を
進めている。
このステップの要求をまとめると、以下のようになる。
このステップの要求
一つの大フレームに属する全ての小フレームの座標は、3.5◦ 程度の長さの間で 10µas
精度で校正されている。長さに変動を与える熱環境や構造系が、この要求を満たすよ
うに構築されている。
3.2.4 撮像イメージから小フレームを構築するステップ
このステップの目的
一つの大フレームに属する全ての小フレームの座標は、3.5◦ 程度の長さの間で 10µas
精度で校正されている。
このステップでは、熱環境など既に校正済みのもの以外の誤差要因を、十分に押さえてお
く必要がある。具体的には、星像中心推定において、色や等級に伴い系統的に星像中心推
定に誤差を発生するような場合は要注意である。また、検出器の flatness などの補正も適
宜行っておく必要がある。
このステップの要求
Centroid に伴う誤差は、系統的には 10µas 以下に抑えられている必要がある。具体
的には、PSF の系統的な変形、たとえば色や等級に伴う変形を、十分な精度で推定
可能であることが必要である。
37
第4章
観測装置および衛星システムのデザ
イン
4.1 衛星のデザイン概要
図 4.1 JASMINE のデザイン。
JASMINE 衛星は、他の観測衛星と同様に、観測装置とそれをサポートするバス部に大
きく分かれる。観測装置は、望遠鏡、検出器等の焦点面装置、観測装置の geometry の時
間変動を測定するレーザー干渉計型モニタから主として構成される。搭載される望遠鏡
は、図 4.2 のような望遠鏡である。星像中心を精度良く求めるために、星像をある程度広
げる必要があり、そのため焦点距離を長くする必要がある。そのため、光路を折り返すた
めの平面鏡を多数搭載する、図 4.2 のような形状となる。概観はほとんど変わらないが、
現在 3 種類の光学系オプションを並行して検討している (4.2 章参照)。
38
第 4 章 観測装置および衛星システムのデザイン
図 4.2 JASMINE の望遠鏡。曲率を持った鏡は主鏡、第一副鏡、第二副鏡の三枚だが、
長焦点距離望遠鏡であるために、途中で光路折り曲げのための平面鏡が 3 枚加わる。
近赤外線領域での観測を行うため、検出器は 0.85µm から 2.5µm までの広い波長域に
感度を持つ HgCdTe を用いる (4.3 章参照)。位置測定の精度を高めるためには、星の光
子数をなるべく多く蓄える必要がある。限られたミッションライフの中で光子数をなるべ
く多く蓄えるためには、なるべく視野を大きくし、一度に見られる星を多くする方が望ま
しい。また、小フレームから大フレームを作成する際に、なるべく連結の誤差を小さく
するためにも小フレームのサイズを大きく、つまり視野の大きさが大きい方が望ましい。
JASMINE では、光学系として約 1°× 1°の視野をデザインしており、そのため、検出
器を 6 × 6 個並べる仕様としている。一方、測光観測が、科学的観点及びデータ改正上
の観点から重要である。そのため、視野の一部は測光用に用いられる。HgCdTe 検出器は
非常に広い波長域に感度を持つため、JASMINE の位置天文観測波長 KW バンド以外に、
適切にフィルターを用いることで、J,H,K といった波長域の検出器として使うことが可能
である。全体の何個くらいの検出器を、どういったバンドでの測光観測にあてるか、位置
天文用検出器を置く予定の像の性質の良い検出器の一部を測光用検出器に置き換えるの
か、あるいは像の周辺部にあらたに追加するかなど、詳細については今後の課題である。
さて、バス部は、通常の衛星同様に、衛星の姿勢制御系、熱構造体、通信、電源系など
から構成される。ところで、JASMINE のミッションの目標精度を達成するためには、重
大な誤差要因からくるノイズを極力小さくする必要がある。JASMINE では、最も重要な
課題が望遠鏡等の観測装置の geometry の時間変動を極力小さくする必要がある。そのた
め、観測装置周りの温度変動を小さくし、構造が変化しにくい望遠鏡の素材と構造体を工
夫する必要がある。また、観測装置の変動が小さいことを実証するため、さらに宇宙軌道
上で変動の小ささを監視するために必要なレーザー干渉計型高精度モニタも必要で、その
開発も重要な課題の一つである。
また、視野をすばやく動かして、次の視野で静止させること、静止した後は、星像がぶ
れないように、望遠鏡の指向を高精度で安定させることも重要な課題の一つである。
軌道は、温度安定性のことを考慮すると、太陽ー地球系のラグランジュポイント L2 周
4.2 望遠鏡・光学系
りのリサージュ軌道が有力候補の一つであるが、通信レート等を考慮すると地球周回軌道
も候補として残っている。
以上が、JASMINE 衛星の全体像である。
4.2 望遠鏡・光学系
アストロメトリー観測における最重要課題は星像位置決定である。そのためには、非常
に長焦点の光学系が必要である。一方で、一定の観測期間内に必要な観測領域を観測する
必要がある。従って、非常に広視野の光学系が必要である。アストロメトリー観測用の光
学系はこの相反する要求を満たす必要がある。
現在最も一般的な光学系は 2 枚鏡であり、特に Ritchey-Chretien 系が非常に良く用い
られる。Ritchey-Chretien 系は主鏡、副鏡ともに双曲面をもつ 2 枚鏡の系である。この光
学系はシンプルでありながら、球面収差、コマ収差が同時に取り除かれるので、「すばる」
をはじめとして HST など多くの光学系に採用されており、光学系の主流となっている。
しかし、Ritchey-Chretien 系で広視野にすると像面湾曲が強く表れる。JASMINE 光
学系は非常に広視野を要求しているので、像面湾曲の問題は深刻である。そこで、3 枚鏡
の光学系を考えると、2 枚鏡に比べて自由度が増えるので球面収差、コマ収差に加えて像
面湾曲も同時に補正できる可能性がある。さらに、補正レンズ系を用いずに補正が出来れ
ば、色収差からも完全に解放される。そこで、我々は 3 枚鏡を基本にした光学設計を考え
ることにした。
3 枚鏡の光学系として、Korsch は 1977 年、モデルを一つ提案した。この光学系は比
較的広視野で長焦点の光学系で、JASMINE の要求を満たす光学系の候補となり得る。
しかし、Korsch 系の焦点面の中央で、像の欠落が存在する。Korsch 系は広視野である
が、distortion などの収差の小さい中心部が使えず、星の位置決定が重要なアストロメト
リー観測には特に不利である。以上で述べた Korsch 系の長所、短所を踏まえて、我々は
Korsch 系を改良し、長焦点、広視野でかつ視野中心の欠落のない光学系の検討をおこな
い、実際そのような光学系が設計された。
定められたミッション期間内に目標精度を達成するため、JASMINE 光学系の仕様要求
は、観測の中心波長が 2.0µm で、主鏡の口径は、既存の設備で製作可能な大きさとするた
め、80cm とする。この場合、観測視野としては、およそ 1 度四方以上を要求する。焦点
距離に関しては検出器上で星像全体のサイズがおよそ 5 ピクセルにわたるよう設計する必
要がある。具体的には、Point Spread Function(PSF) の典型的な大きさである λ/D が焦
点面上で 1.8 ピクセルになるよう設計する。そのため、焦点距離 f は非常に長く、14.4m
となる。F 数は 18 である。焦点面に関しては、アストロメトリー観測用として、1画素
w = 20µm で 2K × 2K の検出器を 36(6 × 6)個並べる。従って、焦点面サイズとして
は 25cm × 25cm となり実視野 0.98°× 0.98°(視野半径 0.7 度)となる。視野半径 0.7
度範囲において回折限界で決まる良像が得られるようにする。焦点面は検出器を多数並べ
る事を考えているので、できるだけフラットが望ましいが、より良い性能のまま、よりコ
ンパクトにするため若干の曲率は許すことにする。また、アストロメトリー観測では星の
位置を正確に決めることが重要なので、distortion はできるだけ小さいのが望ましい。以
上でのべた仕様要求を満たすように、光学設計をおこなった。encircled energy fraction
を十分に保つためには、視野面積を十分にとるのが困難であったが、主鏡に F1 の明るい
39
40
第 4 章 観測装置および衛星システムのデザイン
図 4.3
左上は光学系の概観を表す。また、右上はスポットダイアグラムである。左下
は焦点面の湾曲とディストーションを表す。右下は波面誤差を表す。
光学系を用い、第 3 鏡で、合成 F が 18 になるまで拡大させると広い視野が実現できた。
4.2.1 光学系の設計まとめ
ここで、JASMINE 光学系設計を整理する。最終的に回折限界の 3 枚鏡が得られてい
る。以下、パラメータを示す。
光学系
3 枚鏡 (改良 Korsch 型)
波長 λ
2.0 µm
口径 D
80 cm
焦点距離 f
14.4 m
視野角
0.98× 0.98◦
焦点面サイズ
25× 25cm
検出器 HgCdTe 検出器
ピクセル数
2K × 2K
検出器個数
36 (6 × 6)
ピクセルサイズ w
20 µm
Pixel on sky
286 mas
表 4.1 Summary of the optical parameters for JASMINE
最後に設計された光学系の性能評価の結果を示す。図 4.3 の左上は光学系の概観を表
す。また、右上はスポットダイアグラムである。左下は焦点面の湾曲とディストーション
を表す。右下は波面誤差を表す。
4.3 検出器
41
感度波長
type 1
0.85 ∼ 1.74µm
type 2
0.85 ∼ 2.55µm
pixel 数
2048 × 2048
pixel サイズ
20 or 25 µm
読み出しチャンネル
4 ∼ 16
量子効率
75 ∼ 90%
読み出し速度
8Hz(最大)
bad pixel の比率
0.9%
full well
150,000e−
読み出しノイズ
18e−
暗電流
1.7e− /sec
最適動作温度
type 1
140K
type 2
77K
表 4.2 HgCdTe 二次元アレイ検出器の仕様。有感波長の違う二種類のタイプがある
が、有感波長の広いタイプを用いる。この報告書では、pixel サイズは 20µm のものを
想定している。
4.3 検出器
検出器としては、HgCdTe の赤外線アレイ検出器を用いる。仕様は表 4.2 に示すとおり
である。
従来のバージョンの JASMINE では、完全空乏裏面照射型 CCD 検出器を使う予定で
あった。すでに、宇宙線、読み出し電子回路、星像中心推定などに関して、CCD 検出器
による実験を進めてきた。しかし、CCD 検出器と赤外線検出器とではこういった特性が
異なる可能性があるため、再度検討を行う必要がある。このタイプの検出器は、JWST で
使用が決まっており、宇宙使用における対策などが検討されている。読み出しクロックは
8Hz まで可能だが、電力や発熱の問題があり、最高速度での読み出しが最適かどうかは今
後ほかの項目とトレードオフが必要である。
JASMINE ミッションでは、6 × 6 検出器のモザイク配列技術が必要である。すでに、
VISTA 広視野望遠鏡では 4 × 4 のモザイク配列技術の実績があり、配列技術に関しては
この技術の延長線上にあると考えられる。
より精度よく星像中心を求めるため、flat や感度の長期変動などが問題になる可能性が
ある。通常地上では、星の無いくらい領域を撮像することで、検出器の校正が行われる。
AKARI 衛星では黄道光を観測することで検出器の校正を行っている。具体的な観測スケ
ジュールの中で、どのように校正観測を組み入れて行き、実際にどのように補正を行うか
について、今後検討が必要である。
また、色情報を得るために複数バンドでの測光観測が必要である。サイエンスの観点お
よびデータ解析の観点から最適なフィルターバンドを設計する必要がある。また、位置天
文用検出器を配列する予定の像の性質の良い像の中心部の検出器の一部にフィルターを掛
けるか、周辺部に 6 × 6 の検出器以外に測光用検出器に追加するか、メインバンドともう
42
第 4 章 観測装置および衛星システムのデザイン
一色で良いか数色必要かなど、今後解析手法・観測手法を含めたトレードオフが必要で
ある。
4.4 ジオメトリーモニター
4.4.1 レーザー干渉計型高精度ジオメトリーモニター
新しいバージョン(従来のものより、サーベイ領域を絞り、小型化を目指したもの)に
変更した JASMINE の観測手法では、1 つの観測視野内で撮像された小さな画像 (小フ
レーム) を連結させて 1 枚の大きな画像 (大フレーム) を構築する作業を繰り返し行うこ
とで、大フレーム内にある星の絶対年周視差を導出する。JASMINE 計画の目標位置測定
精度を達成するためには、大フレームを構築する 10 時間の間、小フレームの拡大縮小や
歪みの時間変動を 10 pm 以内に抑える必要があるが、それを打ち上げ前に地上で実証す
る実験が必要である。さらには打ち上げ後に宇宙軌道上で実際に時間変動が望み通りに小
さいことを保証する必要もある。そのためには、10pm 相当の微小変動の高精度測定が必
要不可欠である。小フレームの拡大・縮小や歪みの変動成分を 10pm の精度で知るために
は、次のようなモニター装置の開発が必要である。
• 赤外線検出器や鏡のサイズ変動を 10 時間の RMS 値で、10pm の精度で測定する
「歪みモニター」
• 望遠鏡の光学素子間の幾何学的な配置の時間変動を 10 時間の RMS 値で、10pm
の精度で測定する「望遠鏡ジオメトリモニター」
そこで、このように極めて微小な変動量を非常に長いタイムスケールでモニターする方法
として、レーザー干渉計の技術の応用を考えている。具体的には、Fig.4.4 のように、レー
ザー干渉計を用いた測定系を複数セット用意し、モニターが必要な部分の距離や角度の変
動を高精度で多自由度測定する。
4.4 ジオメトリーモニター
図 4.4
レーザー干渉計型高精度ジオメトリーモニター装置の概要:
「望遠鏡ジオメトリーモニター」主鏡と副鏡間の位置関係をモニターする構成になって
おり、1 本のビームで 1 自由度の変位を測定するとして、6 本のビームを使うことで、
6 自由度の変位をすべてモニターする装置となっている。
「レーザー歪みモニター」=検出器面の縦方向と横方向の長さ変動量をモニターするこ
とで、検出器面の歪みの変動量をモニターする装置となっている。
4.4.2 ヘテロダイン型レーザー干渉計
4.4.1 では、レーザー干渉計型のモニター装置の概要を述べた。4.4.2 では、レーザー干
渉計を用いた測距方法について述べる。微小変動量測定方法として、ヘテロダイン型レー
ザー干渉計を用いて、2 本の光路長の差動変動量を測定する方法を用いる。ヘテロダイン
方式での変動量測定の特徴は、測距信号検出の際、干渉計の光路長を制御する必要がない
点である。干渉計を用いた微小変動量測定で、主に良く使われてきた手法は、ミッドフリ
ンジやダークフリンジ付近での測距信号検出やファブリーペロー共振器の使用等である
が、これらの測定では、測距信号を読み出すために、干渉計の光路長をアクチュエーター
を用いて、制御しなければならない。ヘテロダイン方式の信号検出方法で測距を行った場
合には、干渉光の位相情報が連続的に取り出せることから、信号を読み出すために干渉計
の光路長が干渉条件を満たすように制御する必要がない。また、測定のダイナミックレ
ンジに関して、アクチュエーターのダイナミックレンジによる制限を受けない。従って、
JASMINE で微小変位量の測定手法として、ヘテロダイン型干渉計を用いた測距方法を採
用した場合、以下のような利点があると考えられる。
1. 望遠鏡のジオメトリーを測定するような多自由度測定を行う際、複雑な制御システ
ムを構築する必要が無い。
2. 測定のダイナミックレンジが広いため、人の手で直に修理や調整ができない宇宙軌
道上でも長期間、連続的に測距を行うことができる。
43
44
第 4 章 観測装置および衛星システムのデザイン
図 4.5 ヘテロダイン型マッハ・ツェンダーレーザー干渉計: 概略図
複数自由度の
測定に拡張することを想定して、マッハ・ツェンダー型にしている。片方の光路中に設
置された鏡の位置が
図 4.6
δL
2
変位すると、2 本の光路長の差は δL だけ変化する。
ヘテロダイン型マッハ・ツェンダーレーザー干渉計: 光検出器からの出力信号
マッハ・ツェンダー干渉計の 2 本の光路間に差動変動 δL が生じた場合、その変動量の
大きさは、ヘテロダイン信号の位相変化 δϕ として表れる。
ヘテロダイン型レーザー干渉計の動作原理を Fig.4.5 と Fig.4.6 に示した。レーザー
ヘッドから出射されたビームは、ビームスプリッターによって、2 本に分けられ、それぞ
れ別々に、音響光学素子 (AOM) によって、光周波数がシフトされる。2 つの AOM がシ
フトさせる周波数は互いに fh だけ異なっており、その差周波数 fh をヘテロダイン周波数
と呼ぶ。2 本に分かれて進んでいたビームは、ビームスプリッターによって再結合され、
フリンジパターンが生成される。フリンジパターンは、光検出器によって電気信号に変え
られる。このとき、得られる電気信号は、ヘテロダイン周波数 fh で振動するサイン波と
なる。この信号は、ヘテロダイン信号と呼ばれ、その時間変化は次のようになる。
cos(2πfh t +
2πL
)
λ
(4.1)
L は、2 本の光路の光路長差、λ は、レーザーの波長である。2 本の光路の光路長差に
変動量 δL が生じた場合、その大きさは、ヘテロダイン信号の位相変化 δϕ として以下の
ように表れる。
4.5 姿勢軌道制御系
45
δϕ =
2πδL
λ
(4.2)
この位相変化量 δϕ は、別に用意したリファレンス干渉計からの出力として得られたヘテ
ロダイン信号の位相と比較することで測定される。リファレンス干渉計とは、位相の基
準となるヘテロダイン信号を得るための干渉計で、測距を行う干渉計とは別に、安定な
環境下に設置される。従って、2 本の光路のどちらかに、互いの間の距離変動量を知りた
い 2 枚の鏡を配置すれば、その変動量の大きさは、位相変化 δϕ として検出されるので、
ヘテロダイン型レーザー干渉計で測距を行うことができる。また、2 本の光路を枝分かれ
させ、それぞれ再結合させることで、2 台の AOM を用いて、複数のヘテロダイン型レー
ザー干渉計を構成することができるので、容易に多自由度測定へと拡張させることができ
る。JASMINE の望遠鏡ジオメトリーモニターに対する測定精度の要求値は、10 時間の
RMS 値で 10pm であるが、その変位量を位相変動量に読み替えると、使用するレーザー
を Nd:YAG レーザー、波長 λ=1064nm とした場合、およそ 10−4 rad に相当する。すな
わち、JASMINE の要求精度で、変位量をモニターするためには、10−4 rad の測定精度
の位相比較器が必要である。これまでに、位相比較器として、市販のデジタルロックイン
アンプの動作テストを行っており、10 時間の RMS 値で 6×10−5 rad の位相測定精度があ
ることを確認した。従って、地上でのモニターの動作に関しては、検出器の性能として、
JASMINE の要求する精度で変位量を測定することは可能である。なお、衛星機器搭載用
の位相比較器に関しては、今後の研究開発が必要である。
図 4.7
位相比較器の測定雑音のパワースペクトル密度。なめらかな太線 は 1Hz から
各周波数までの帯域での RMS 値を示している。
4.5 姿勢軌道制御系
4.5.1 姿勢
JASMINE は天の川銀河のバルジ領域、20 度× 10 度の領域を観測する。また、その
20◦ × 10◦ の観測領域に対して、隙間無く撮像された多数の画像を連結し観測領域全体の
46
第 4 章 観測装置および衛星システムのデザイン
表 4.3
出力トルクと最短時間制御の関係。JAXA における集中検討レポート (2008
年 3 月) より。
出力トルク [Nm]
最短時間制御 [s]
PD 制御 [s]
0.1
13
47.5
0.4
6.5
23.8
0.5
5.8
21.2
1
4.1
15
2
2.9
10.6
3
2.4
8.7
40
0.7
2.4
画像を構築する。撮像方法は、以下の通りである。観測領域の、ある方向に望遠鏡を向
け、静止させる。その方向で、撮像を 8 回行なう。撮像後、姿勢を変更し、視野半分だけ
移動させる。その後、静定するのを待ち、その新たな方向で撮像を 8 回繰り返す。以上の
操作を繰り返し、観測領域を覆いつくす。
図 4.8
姿勢変更手順
望遠鏡部の熱環境は、10 時間の間では要求の範囲内の変動を抑え、その間は温度は変化
しないと見なせるようにしている。そこで、全観測領域を覆うのを 10 時間以内で行なう
ようにする。そのためには、次のような姿勢制御を行なう必要がある。ある方向の撮像が
終わって次の撮像が始まるまでに、姿勢変更と静定を 8 秒間で実施する。その後、ティッ
プティルトミラーにより 10 の− 5 乗度程度にまで検出器面上の像を安定化させ、次の撮
像に移る。ティップティルトミラーによる像の安定化の所要時間は 1 秒より十分に短いの
で無視できる。従って、姿勢変更と、静定にトータル 8 秒間隔を必要とし、この時間であ
れば 10 時間で観測領域全体を覆いつくす事が可能である。
姿勢変更のためのアクチュエーターとしては、RW(リアクションホイール)と CMG
(コントロールモーメンタムジャイロ)が候補となっている。RW は比較的擾乱が少ない
が、トルクが十分に大きくないので、姿勢変更に時間がかかる。その一方で、CMG は
RW の 100 倍程度のトルクを発生させる事が出来、応答速度が速い。実際、CMG の搭
載で 40 Nm トルクを出すことは可能で、要求の時間内での姿勢マヌーバに必要なトルク
は十分に得られる。しかし、擾乱が大きいというデメリットがある。JASMINE の場合、
8 秒程度で姿勢変更と静定を行ないたい。CMG があれば、十分可能だが、擾乱が問題と
なる。
ここで、SPICA、TPF の「バス部+ミッション部」の形状を参考にして、JASMINE
衛星全体質量は、500kg、慣性モーメントを、1000 kgm2 と仮定すると、次のようなトル
クと制御時間の関係が得られる。
現状の RW でも、0.5∼1 Nm のトルクを出すことは可能であり、ミッションの要求で
4.5 姿勢軌道制御系
ある 8 秒の範囲で、姿勢マヌーバを行なうことが出来るレベルに迫る。更に、現在 JAXA
総研本部で開発中の将来型 RW を搭載できるとすると、2∼3 Nm 出すことが可能とな
る。この将来型 RW を開発でき、徹底的な擾乱管理等の対策を施せば、ミッション要求
の 8[sec] を満たすことは可能であると思われる。もしくは、多数の RW を用いる事も考
えられる。
4.5.2 軌道
JASMINE の観測目標を達成する軌道に対する要求として、以下のような項目を上げる
ことが出来る。
• 温度安定性を満たす
• 通信量を確保すること、アンテナ可視時間を確保すること
• 重量の上で打ち上げ可能な軌道であること
• 地球や太陽の方向との関係から、観測時間を確保すること
• 衛星の速度推定精度は 1.5mm/sec 以下
• 衛星の位置推定精度は 150km 以下
• 打ち上げ機会
以上のうち、特に、最重要項目である熱環境、データ転送率の観点を中心に決定される。
熱環境
10 時間で、光学系部分を 20mK の温度変動に抑える必要がある。地球から遠いほど、地
球からの熱やその変動を受けずに安定化できる。更に太陽と地球はともに熱源となるので
熱を管理するには同じ方向に見えている方が都合良い。
通信量
JASMINE の場合、観測に平均でおよそ2 Mbps の転送速度が必要である。この観点で
言えば、転送率は距離の 2 乗に反比例するので、地球から近い方が大容量のデータの通信
が容易である。
衛星の軌道として、いくつかの候補がある。その候補軌道は太陽-地球系のL2ポイン
トのリサージュ軌道、2 種類の高高度略円極軌道、そして黄道傾斜角が 90 度に近い静止
高度の軌道である。
太陽-地球系のL2ポイントのリサージュ軌道
L2ポイントでは地球の見える方角は太陽と同じである。また地球までの距離が大きいの
で要求する熱環境を満たすのが比較的容易である。この観点に立てばL2軌道は候補軌道
の中でもっとも都合が良い。しかし、地球までの距離が最も大きいために、データ転送速
度はかなり小さい。
高度 600000 km の高高度略円極軌道
この軌道の衛星はL2軌道に比べてそれ程遠くはない。従って、データ転送速度の観点か
らいえば、優位性がある。L2軌道に比べて転送速度は 6 倍程度になる。
高度 170000 km の高高度略円極軌道
この軌道では、衛星と地球の距離は上の 2 つの軌道と比べて更に近くなる。従って、より
多くのデータを送るのが容易になる。しかし、その一方で、地球からの熱輻射、アルベド
47
48
第 4 章 観測装置および衛星システムのデザイン
図 4.9
軌道候補
図 4.10 HISO の場合。JAXA における集中検討レポート (2008 年 3 月) より。白黒に変更。
の影響が大きくなってくる。
黄道傾斜角が 90 度に近い静止高度の軌道
この軌道を用いれば、地球までの距離が候補軌道の中で一番小さい上に、地球の自転速度
と同期しているので、候補軌道の中で、データ転送が最も容易となる。この観点では最良
の軌道であるが、一方で、地球の熱輻射の影響は相当に大きい。従って、熱環境の要求を
満たす事は非常に困難である。
各軌道の検討の詳細
黄道傾斜角が 90 度に近い静止高度の軌道
静止軌道をとった場合、赤道面と黄道面の交点である春と秋に蝕となる。その春と秋に
それぞれ 45 日間地球の影に入ってしまう。年周視差の導出に重要な秋と春に 2 ヶ月近い
期間観測不能となるため、適した軌道といえない。一方で、軌道半径を静止半径と同じに
4.5 姿勢軌道制御系
図 4.11 HCPO の場合。JAXA における集中検討レポート (2008 年 3 月) より。白黒に変更。
したまま、軌道面を傾けることを考える。このように地球自転と同期させると通信の観点
から有利といえる。いずれにしても、蝕は避けられないので、観測に重要な春と秋からず
らし、蝕の起こる期間を短くする事を考える。そこで、軌道面を黄道面にほぼ垂直にす
る。さらに、図 4.10 のように春秋ラインから約 45 度回転させる。どちらに回転させるか
には任意性があるが、蝕時期のすぐ後に春及び秋の重要な観測時期の来ない図 4.10 の設
定が良い。こうすると、蝕の時期は、5 月と 11 月となる。
このように、黄道面垂直の軌道面にすると、蝕の期間は約 18 日となる。1 回の蝕時間
は最大約 1.2 時間。これらの蝕の後も、蝕前と同じ精度の観測を継続できる事が、この軌
道を採る場合の必須条件である。
HISO 軌道面を黄道面垂直にしておくと、月太陽の潮汐力は HISO の軌道面を長期的に
は変化させない。従って、HISO は 5 年程度の期間では軌道保持制御は不要か僅かで済む
と考えられる。
高高度略円極軌道
L2 点周りのリサジュ軌道では 6 年間蝕なしを実現でき、有力な候補であるが、地球から
の距離が遠いため、通信に不利である。そこで、地球に近い軌道を検討したい。高高度略
円極軌道で地心半径を約 14 万 km 以上とした場合、図 4.11 のような、蝕を受けることな
い軌道を設定できる。軌道面に関しては、地球が観測の邪魔にならないように春秋方向に
してある。
この軌道面方向の場合、春と秋に蝕の可能性があるが、図 4.12 における角θの範囲に
地球が存在する場合だけ蝕の可能性がある。さらに、図 4.13 のように、JASMINE が地
球の裏側の角φの範囲にはいらないと蝕の可能性はない。地球が角θの範囲に存在する期
間を T1、φの領域外に存在する期間を T2 とすると、T 1 < T 2 であれば、蝕を避ける事
ができる。更に、半年が HCPO 軌道周期の半整数倍 (26.5 等) に近ければ、春と秋のどち
らでも蝕を避ける事ができる。
HCPO の軌道半径を変えて、軌道周期、T1、T2、半年と軌道周期の比を表 4.4 に記し
た。地球の球対称重力のみを考慮した二体問題近似である。表のとおり、約 14 万 km 以
49
50
第 4 章 観測装置および衛星システムのデザイン
図 4.12 蝕に入る可能性のある地球位置。JAXA における集中検討レポート (2008 年
3 月) より。白黒に変更。
図 4.13
蝕に入る JASMINE 位置。JAXA における集中検討レポート (2008 年 3 月)
より。白黒に変更
上の軌道半径であれば、初期条件を適切に調整する事により、蝕を避けられる。軌道半径
が 15 万 km∼20 万 km の HCPO に対して、月太陽潮汐力の影響を検討したところ、9∼
6 年は軌道制御なしでも問題ない。
一方、HCPO の軌道半径を 60 万 km 程度まで大きくした場合の問題点は離心率の増
大であるが、1000 日間程度は無制御で観測軌道として利用できる結果を得ている。但し、
その後は 0.1 程度の離心率制御 (所要Δ V は 50m/s 程度) を行なって面内形状をリセット
する必要がある。
4.6 熱・構造
4.6.1 単純な熱モデルによる評価
現在の JASMINE の仕様では、大フレームのスケールや位置の変動は、同時に撮像さ
れる 4 個の QSO の年周視差と固有運動がともに 0 であることを用いて固定される。この
ことを利用して正確に年周視差などの位置天文パラメータを決めるためには、QSO の間
の距離 ℓ 程度の間で、撮像される像の上の物差しが等間隔に振られていることが必要で
ある。今、この条件を、両端が固定されている場合の変動の最大値がほぼ中央程度に来
るとして、長さスケールとして ℓ/2 を採用する。今、QSO の数 nQSO = 4、撮像領域が
20◦ × 10◦ であるとすると、QSO の平均間隔は
20◦ × 10◦
= 7◦ →
ℓ =
ns
2
( )
ℓ
∼ 3.5◦
2
程度となる。光子ノイズ限界での誤差とシステム変動による誤差はともに 5µas 程度に割
り振ったので、望遠鏡の熱変動などに由来する像の伸び縮みは 7◦ スケールで 5µas 以内
に抑えることが、システムに対する要求となる。像面のスケールが 0.98◦ であることから
焦点面上で
1.39µas
5µas
=
以下の変動であることが要求され、焦点距離が 14.4m であ
◦
3.54
0.98◦
4.6 熱・構造
51
表 4.4 蝕を避ける HCPO。JAXA における集中検討レポート (2008 年 3 月) より。
軌道半径 (万 km)
軌道周期 (日)
T1(日)
T2(日)
半年/軌道周期
4.2166
0.9973
17.6540
0.9491
183.117
5
1.2878
14.8714
1.2354
141.814
6
1.6929
12.3824
1.6355
107.881
7
2.1333
10.6082
2.0713
85.610
8
2.6063
9.2791
2.5401
70.071
9
3.1100
8.2463
3.0398
58.723
10
3.6425
7.4205
3.5685
50.139
11
4.2023
6.7451
4.1247
43.459
12
4.7882
6.1824
4.7071
38.142
13
5.3990
5.7065
5.3146
33.827
13.63
5.7962
5.4425
5.7098
31.509
14.24
6.1896
5.2092
6.1013
29.506
14.57
6.4060
5.0911
6.3167
28.509
14.92
6.6382
4.9716
6.5479
27.512
15.3
6.8934
4.8481
6.8019
26.493
15.7
7.1655
4.7245
7.0728
25.487
16.12
7.4550
4.6013
7.3610
24.498
16.57
7.7693
4.4763
7.6741
23.507
17.06
8.1164
4.3477
8.0198
22.501
17.58
8.4904
4.2190
8.3923
21.510
18.15
8.9066
4.0865
8.8070
20.505
18.77
9.3669
3.9514
9.2655
19.497
19.44
9.8728
3.8152
9.7697
18.498
20.17
10.4341
3.6771
10.3291
17.503
ることから焦点面上の変動は 14.4 × 6.72prad = 97pm 以下であることが要求される。
焦点距離を F [m]、ノミナルなサイズを L[m] 、構造体の線膨張率を α 、温度の変動を
∆T [K] とすると、画素のずれ δ[m] は次のようになる。
δ = ∆T × α × F ×
C
L
= ∆T × α ×
2F
2
4.2 章の分析から、像面上の変動を約 100 pm 以下に抑えるには、約 1m の主鏡副鏡間距
離の影響が最も大きく、これを約 200pm 以下に抑える必要がある。そこで、熱変動の要
求として、
∆L
< 2 × 10−10
L
という条件が出てくる。支持材として、今 SiC(Silicon Carbide) が有力候補とされてい
るが、温度 50K の環境での熱線膨張率は、α ∼ 10−8 程度であるから、大フレーム構築の
約 10 時間の間に 20mK 以内の変動に収まれば、この条件が達成されることになる。
52
第 4 章 観測装置および衛星システムのデザイン
図 4.14 熱モデルの概要
図 4.15 放射放射結合
まず、太陽熱入力変動は、大フレーム構築時に姿勢が ±10◦ 程度変動することに伴っ
て、20% 程度変動する。この変動のもとで、JASMINE の望遠鏡が 50K の並行温度を保
つように熱管理されているとして、変動がどの程度あるかを考察する。このとき、何らか
2
の方法で望遠鏡に対する熱入力が ±2mW/m 以下に抑えられていれば、この条件は成立
する。
4.6.2 断熱材の外側でのヒーター制御
20mK という要求条件は、SIM や GAIA に比べて困難なものではないので、SIM が採
用している方法について検討する。SIM は、図 4.15 に示すように、断熱材の外側にヒー
ターを置いてこのヒーターで熱制御することにより、干渉計装置全体の温度制御を行って
いる。これにより、温度制御精度は温度安定度要求に比べて緩和される。遮蔽板の外部温
度は、太陽からの熱入力変動でヒーター無しに実現される温度範囲の高い方の温度に合
わせて、ヒーター制御される。これは、冷却より加熱の方が制御が簡単だからである。ま
た、バス機器を一番内側の遮蔽板より外側に設置することで、バス機器の発熱による影響
を排除することができる。断熱材の外側でヒーターをたくため、電力は余分に必要である
点は問題点として指摘されていた。
この方法では、断熱材の外側からの熱流入と断熱材の内側への熱流出が同じ T のべき
に従う (双方が輻射である、あるいは双方が伝導である場合) ものとして、エネルギーをあ
る小さい一定の比率で透過させるような非常に単純なモデルを用いれば、ヒーター制御で
実現できる制御範囲に対して、断熱材の外側 (Tout ) と内側の温度比分 (Tin ) だけ断熱材内
4.6 熱・構造
53
Sun
W = 1.3kW/m2 → T ∼ 400K
thermal shield(4 × 10−2 )
W = 30 ∼ 50W/m2 → T = 150 ∼ 175K
← heater
W = 50 ± 1W/m2 → T = 175 ± 1K
thermal shield(2 × 10−3 )
∆T = 2mK/1h → W = 100mW/m2 ± 2mW/m2
表 4.5
JASMINE での従来の検討では一気にエネルギーで 1.5 × 10−5 倍の熱遮蔽を
行い、外界の熱変動の影響をもろに受ける。外界の変動には太陽指向の変動とバス機器
の発熱量変動があるが、一枚遮蔽板を通すことによって、光学装置側の熱環境を格段
に安定化させることが可能となっている。この考え方は、JASMINE にも応用可能で
ある。
図 4.16
放射伝熱結合
側の温度制御精度が向上するという結論が得られる。すなわち、∆Tin /Tin = ∆Tout /Tout
に従う。この結果は、図 4.18 の一点鎖線で示してある。今、JASMINE の温度制御要
求は 20mK であるのにたいして、JAXA から示された制御可能温度精度の実績値は 1K
程度であるから、30 倍の開きがある。すなわち、JASMINE のノミナル温度 50K の 30
倍、1500K 程度に温める必要があるという単純な結果になるが、これは非現実的な値で
ある。もし制御精度が 0.18K 程度まで向上できれば、300K 程度、常温での温度管理で
JASMINE の熱安定要求が実現可能になる。
しかし輻射入力・伝導出力の場合は ∆Tin /Tin = ∆Tout /4Tout に従うので条件は緩和
される。
単純なオーダー計算では、輻射で流入して伝導で流出すれば、両者のべきの比である係
数 4 が稼げるので、常温で 0.7K の精度で制御できれば断熱材の内側では 50mK が達成さ
れている計算となる。ただし、実際にはもう少し詳細なモデルが必要である。
伝導を無視して放射だけで 50K を実現するとして、ϵ ∼ 0.03 のオーダーなら、遮蔽板
の温度は 180K 程度まで冷却する必要がある。伝熱結合があるので、さらに低い領域での
管理となる可能性がある。一方、望遠鏡の遮蔽板側と深宇宙側で別の塗料を塗るなどして
さらに高温での平衡解が可能かもしれない。
54
第 4 章 観測装置および衛星システムのデザイン
図 4.17 放射伝熱結合が共存する場合の熱モデル
4.6.3 放射結合と伝熱結合が共存する場合の熱モデル
そ こ で 、図 4.17 の よ う な 熱 モ デ ル を 考 え る 。今 、放 射 に よ る 結 合 だ け の 場 合 は
∆T0 /T0 = ∆T1 /T1 であり、一方伝導による結合だけの場合はで ∆T0 /T0 = ∆T1 /4T1 で
ある。これらが混在する状況を考えると、図中に示したような熱の流れがある。素材の物
性や表面特性・幾何学形状で決まる係数 a = a′ /c に対して、
aT14 + b(T1 − T0 ) = T04
(4.3)
となるよう熱抵抗 b = b′ /c を調整する。このとき、T0 の安定度要求 ∆T0 に対して T1 の
安定度要求 ∆T1 は、Tmax = a1/4 T0 、d = a1/4 、x = T1 /Tmax として d と x だけで書け
る。ここで、Tmax は放射 100% の場合の平衡温度である。 ∆T0 と ∆T1 の関係は、
∆T0 =
3x4 − 4dx3 + 1
∆T1
−x4 + 4x/d + 3
となる。これを、 T0 = 50K 、 ∆T0 20mK の場合に T1 と ∆T1 の関係としてグラフに書
くと、4.18 図の破線のようになる。
例えば温度比で 10 倍 (エネルギーで 1 万倍) の断熱が可能であれば、常温で 0.5K 精度
の温度管理でシステムが成立する。
4.6.4 熱容量を考慮した評価
上で考えているモデルでは、外の環境が変化した場合にそれに追随して平衡に達した場
合に、内部の温度がどの程度変化するかを評価している。しかし、SiC の物性値や質量な
どを考慮すると、平衡に達するには 100 時間程度の時間がかかる。JASMINE の温度変
動要求は、大フレーム作成中の約 10 時間であるため、実際には上で評価した値の 10 倍程
度、要求が緩和される。
この場合、式 (4.3) は比熱容量 C 及び質量 M を用いて
CM
dT1
= a′ T14 + b′ (T1 − T0 ) − cT04
dt
(4.4)
のように変更され、この積分を大フレーム構築時間程度実行したときに ∆T0 < 20mK
となる条件を満たすための、∆T1 と T1 の関係を見ることになる。ここで、a′ およ
4.6 熱・構造
図 4.18
単純な熱解析の結果。一点鎖線は放射結合のみを考えて平衡に達する場合の、
遮蔽板外側の温度 T1 と温度安定度要求 ∆T1 の関係。波線は放射伝熱結合の共存の場
合で、平衡状態に達する場合。実線は熱容量を考慮した非平衡解での条件。いずれも、
望遠鏡の温度は T0 = 50K および安定度は ∆T0 = 20mK を達成するための条件。
び c はそれぞれ effective な放射面積 Aa 、Ac と係数 ϵ1 、ϵ0 、Stefan Boltzman 定数
σ = 5.67 × 10−8 W/m2 /K4 を用いて a′ = Aa ϵ1 σ 、c′ = Ac ϵ0 σ となる。仮に現実的な範
囲の値として A = 2m2 、C = 50J/kg/K、M = 60kg の値を置いてこれを計算したのが、
図 4.18 の実線である。以上をまとめると、
• 熱結合として放射のみを考慮して定常状態に達するのに必要な安定度を検討する
と、内部で 50K で 20mK の安定度を達成するのに常温程度の遮蔽板を用いると、
120mK 程度の精度で制御する必要がある。これは、従来の衛星の温度制御の実績
値 1K に比べて一桁厳しく、開発の難易度は高い。
• 放射結合と伝熱結合が共存する場合は、同様の条件で 0.5K 程度の温度制御で良い。
これは、従来の温度制御の実績値からわずか 2 倍厳しい値で、JASMINE 打ち上げ
までの開発での実現性が高い。
• さらに、大フレーム構築時間を約 10 時間としてその間に 50K に冷やされた内部で
の温度変動が 20mK 以下という条件を考慮すると、常温の遮蔽板で 1 度以上の変
化が許容される。この制御は実績値の範囲であり、現在の技術で実現可能である。
ただし、この計算の前提となる放射結合と伝熱結合の強度が実現可能かについては
今後の課題である。
55
56
第 4 章 観測装置および衛星システムのデザイン
4.6.5 温度センサーの検討
熱制御に関しては、
http://www.sankyointernational.co.jp/sensa/ondo/ondo.html
に以下の型番の機器が紹介されていて、地上では mK 以下の測定は可能である。またセ
ンサーには白金、熱電対、RhFe などの抵抗素子があり、特に RhFe は線形性もよく放射
線にも強く、400◦ 以下で使うには最適な素子と考えられる。これをスペースに応用する
ことが可能かどうかを検討する。
型番
精度
分解能
◦
◦
F200
0.01
F300
5mK
F700
1ppm
F900
20ppb(50µK)
0.001
レンジ
◦
備考
◦
−200 ∼ 962
0.1mK
交流ブリッジ
◦
◦
−272 ∼ 1064
〃
0.5ppb
4.6.6 周期の制約
最大熱入力変動量(振幅)は同じにして、さまざまな周期のサイン波で熱入力をおこな
い、影響量を熱入力変動の周期の関数として表すことを考える。モデルは、以下の条件で
計算した。
1. 熱伝導は考えない。無限大とする。∆Q = C∆T = T ∆L/(αL) の関係で変化する。
2. 熱入力変動量の積分量に応じて小フレーム画角サイズが変動。小フレームの変動は
1 枚の大フレームの画角歪みとなる。
3. 大フレーム作成時間 Tg=10 時間 [正確には 10h ×(1+1/876)。10 時間との
わずかなずれは 1 年で 10 時間分、すなわち1周期分に達し、年周楕円運動と同期]
熱入力変動の角振動数が 10 時間の周期の場合の整数倍となる場合に画角変動の影響が
強く出る。またそれらのピークは周期の長さに比例する。その理由は熱入力変動量の振幅
が同じ場合、1 回の振動で出入りするエネルギーは周期に比例するからである。
熱入力の周期 Tint = Tg = 10hours 周期で 0.2mW が許容範囲だとすると、熱入力の周
期 Tint のときの許容熱入力は
W = (Tg /Tint [h]) × 0.2[mW ]
である。
周期が 1 枚の撮像時間より短い場合には上述の効果に加えて次の効果により更に条件が
ゆるい。
積分時間 T0 = 1.2sec より短い周期の熱入力変動は 1 枚の小フレームの撮像時間以内で
あり、効果がキャンセルされる。それ以上の周期をもつ入力の場合はキャンセルされず熱
入力がそのままのこる。角振動数 ω で熱入力変動を与える場合、1.2 秒間のウインドウを
かけたものが 1 フレームのトータル熱入力変動量である。定量的には以下のとおり。
4.6 熱・構造
57
図 4.19
熱安定実現に対して問題になる周波数の分布。
熱入力の角振動数 ω = 2π/Tint 、積分時間 T0 = 1.2s
∫
t+T0 /2
I=
A sin ωt dt
t−T0 /2
A
t+T /2
[cos ωt] 0
T ω { t−T0 /2 }
sin(ωT0 /2)
= A sin ωt
(ωT0 /2)
=−
ω = 2π/Tint より高周波の熱入力は係数 {sin(πT0 /Tint )/(πT0 /Tint )} で減衰する。熱
入力の振動数の小さい時は {sin(πT0 /Tint )/(πT0 /Tint )} → 1 となり、熱入力量がそのま
ま寄与する。
従って許容熱入力変動量は
W = (Tg /Tint ) × {(πT0 /Tint )/ sin(πT0 /Tint )} × 0.2[mW ] > (Tg /Tint [h]) × 0.2[mW ]
以 上 よ り 、い ず れ の 周 期 で も W = (Tg /Tint [h]) × 0.2[mW ] を 許 容 範 囲 と す れ ば
十 分 で あ る 。周 期 を 秒 で 表 し た 場 合 の 許 容 熱 入 力 変 動 量 は 以 下 の と お り 。W W =
(0.7/Tint [s])[W ]
周期 Tint が Tg = 10hours 以上の場合は画角の系統的な誤差はあらわれない。各大フ
レームの誤差が相殺するため。
まとめると、許容熱入力変動量 Tint < Tg = 10h で W = (0.7/Tint [s])[W ] Tint >
Tg = 10h では許容量は十分緩い。
58
第 4 章 観測装置および衛星システムのデザイン
図 4.20 衛星構造の概念図。JAXA における集中検討レポート (2008 年 3 月) より。白黒に変更
4.6.7 構造・材料からの検討
JASMINE は大フレーム観測時間中に 20◦ 程度姿勢を変更するため、太陽方位角が変
化し、熱入力変動が発生する。この場合、passive な熱制御では要求されるような熱安定
を実現するのは難しい。そこで、SIM の熱管理の概念を応用し、適切な放熱を考えつつ多
層の断熱材を配置してその間のヒーター制御用いるような active 制御を導入する。これ
により外部熱入力変動を安定化し、温度管理が実現可能な範囲に入ることになる。断熱材
を多層にしても適切に放熱しなければ冷却されない。そこで、図 4.20 のように望遠鏡開
口部側で熱遮蔽板を開いて熱を逃がすようにすること、あるいは遮蔽板にラジエータ部を
つけることなどが考えられる。シールドの層数や形状などは、詳細な熱解析によって決定
されることとなる。
さらに、望遠鏡の素材としては、バス系との断熱特性と擾乱を防止する支持機構である
ことの双方の特性が要求される。これらはしばしば相反する特性を持つことがある。図
4.21 において比弾性率(弾性率/密度)が荷重に対する変形抵抗、熱膨張率/熱伝導率が温
度に対する変形抵抗を示す。アルミを 1 とした場合の常温と 100K の物性値を比較してあ
る。極低温では SiC が優れた特性を持つことが判る。ミラー材料としてはゼロ膨張ガラ
ス(ULE、Zerodur)が最も実績があるが、通常は常温近傍でゼロ膨張特性を持つよう調
整されている。CFRP は最も優れた材料特性を持ち軽量化が容易な特長があるが、複合
材料なのでそのままでは必要な表面粗さ(数 nmRMS)の鏡面とすることが困難である。
オプティカルベンチや鏡筒の構造材料の候補である。
具体的な構造検討を行うにあたり、代表的な二つのタイプの衛星熱管理コンセプトを
比較すると、表 4.6 のようになる。 JASMINE は低温で運用されるため、基本的には
SPICA タイプが望ましいと思われる。そこで、図 4.26 のような形状を考える。内側か
ら、鏡部 (バッフル)、鏡筒、熱シールド#1、熱シールド#2、熱シールド#3、サンシール
ドから成る。各部材は、サンシールドから伸びる低熱伝導率 CFRP 支持部材 (鉛直方向
に 8 本、円周方向に 8 本) によって支えられているものとする。鏡筒、熱シールド、サン
シールドは A6061 パネルの両面に MLI を貼付したものとする。また、サンシールドの太
陽側の MLI には銀蒸着 PEI を貼付し、シールドのラジエータ部には黒色ペイントを施し
4.6 熱・構造
表 4.6
59
コンセプト比較。JAXA における集中検討レポート (2008 年 3 月) より。図
は白黒に修正。
■ SPICA タイプ
■ ALOS/PRISM タイプ
(要求温度レベル)
・極低温要求の光学系が前提
・光 学 系 の 温 度 レ ベ ル は 常 温 2 0
degC (低温要求のミッションであ
れば冷却系が必要)
(熱制御系コンセプト)
・光学系低温要求のため深宇宙への
・ヒータ制御により外部からの熱侵入
排熱パスのコンダクタンスが大きく
を遮断・断熱保温設計・Active 熱制御
確保・排熱パスのコンダクタンスに
より光学系への熱変動の軽減が期待・
Passive 熱制御
(熱制御系の概要)
・サンシールドによる太陽光熱侵入を
・光学系を囲むようにヒータパネル
遮断・3層のサーマルシールド(ML
を設置・ヒータパネルの周りにはML
I施工のアルミ板)により光学系と低
Iを施工して断熱(外部との熱結合を
輻射結合・サーマルシールドの一部が
弱くする)・サーマルシールドの最外
ラジエータとして機能し、深宇宙への
表面は高εの熱制御材(銀蒸着テフロ
排熱パスを確保・衛星バス部とは低熱
ン、OSR)により深宇宙への排熱パ
伝導率トラスで支持
スを確保
(課題)
・姿勢制御時、軌道周回時に安定した
・姿勢制御時、軌道周回時に安定した
太陽光照射、排熱環境が実現できる
太陽光照射、排熱環境が実現できる
か・熱シールド、ラジエータに割り当
か・光学系の均一加熱・ヒータパネル
てられる重量リソースの確保
の温度制御性
(その他)
・光学系に対する熱擾乱は検出器自身
・光学系に対する熱擾乱は検出器自身
の発熱、太陽光照射、放熱条件、バス
の発熱、ヒータパネルの温度変動が主
機器の発熱の変動が主要因・熱シール
要因
ド熱容量を温度安定に積極的に利用
60
第 4 章 観測装置および衛星システムのデザイン
図 4.21
鏡面材料の特性比較(アルミを1とした場合)。JAXA における集中検討レ
ポート (2008 年 3 月) より。白黒に変更
図 4.22
SiC の熱膨張率。JAXA における集中検討レポート (2008 年 3 月) より。白黒に変更。
ている。また、鏡筒先端の傾斜を 55deg としている。これは、要求 (3) 観測期間を満たす
ため、観測のための首振り (± 10deg) を行った場合でも、春秋において太陽光を直接鏡部
へ入射させないための処置である (図 4.27)。
熱経路の概念図を図 4.28 に示す。平衡状態では熱入力と放熱量がひとしい。これをも
とに、平衡状態及び非定常状態での熱解析を行った。使用した物性値は表 4.9 に示すとお
りである。
まず定常熱解析では、面間の熱放射の実効熱放射率は
(
ϵef f =
)−1
1
1
+
−1
ϵ1
ϵ2
となる。面間の熱放射に対応する面積は、両面の表面積の平均と近似する。鏡部絶対温度
50K を満たす条件で解析を行った結果が表 4.10 である。
4.6 熱・構造
61
図 4.23 ゼロ膨張ガラスの熱膨張率。JAXA における集中検討レポート (2008 年 3 月) より。
図 4.24
CFRP(炭素繊維強化プラスチック)の熱膨張率(XN70A/RS-3、擬似等方
積層板)。JAXA における集中検討レポート (2008 年 3 月) より。図は白黒に修正。
図 4.25 参考資料。JAXA における集中検討レポート (2008 年 3 月) より。白黒に修正。
表 4.7
多層構造各部のサイズ。JAXA における集中検討レポート (2008 年 3 月) より。
熱シールド
鏡部
鏡筒
#1
#2
#3
サンシールド
-
0.1
0.1
0.1
0.1
0.1
底面直径 [m]
1.2
1.4
1.5
1.6
1.7
1.8
太陽側高さ [m]
3.11
3.40
3.69
3.97
4.26
4.54
深宇宙側高さ [m]
1.4
1.4
-
-
-
-
ラジエータ幅 [m]
-
-
0.05
0.05
0.37
-
内側部との間隔 [m]
62
第 4 章 観測装置および衛星システムのデザイン
図 4.26 JASMINE 形状案 (SPICA 類似)。JAXA における集中検討レポート (2008
年 3 月) より。図は白黒に修正。
表 4.8 その他部位のサイズ。JAXA における集中検討レポート (2008 年 3 月) より。
鏡直径 [m]
0.8
支持部材断面直径 [mm]
50(SPICA の平均サイズ)
支持部材厚さ [mm]
3(SPICA の平均サイズ)
支持部材の数
16
各部間の支持部材の長さ [m]
0.1(表1、内側部との間隔の値と等しい)
図 4.27 JASMINE による観測の様子。JAXA における集中検討レポート (2008 年 3
月) より。白黒に変更。
4.6 熱・構造
図 4.28
63
熱経路概念図。JAXA における集中検討レポート (2008 年 3 月) より。白黒に変更。
表 4.9
熱制御材の特性。JAXA における集中検討レポート (2008 年 3 月) より。
名称
放射率
太陽光吸収率
MLI
0.2
N/A(計算で使用していない)
銀蒸着 PEI
0.82
0.2
黒色ペイント
0.82
N/A(計算で使用していない)
図 4.29 CFRP 熱伝導率。JAXA における集中検討レポート (2008 年 3 月) より。図
は白黒に修正。
64
第 4 章 観測装置および衛星システムのデザイン
図 4.30 A6061 比熱。JAXA における集中検討レポート (2008 年 3 月) より。図は白黒に修正。
表 4.10 定常熱解析結果。JAXA における集中検討レポート (2008 年 3 月) より。
熱シールド
温度 [K]
深宇宙への熱放射面積 [m2]
面間の熱放射面積 [m2]
深宇宙への熱放射 [mW]
内側部への熱放射 [mW]
内側部への熱伝導 [mW]
総熱入力 [mW]
総熱出力 [mW]
鏡部
鏡筒
50.00
0.50
146.07
146.07
146.07
58.30
3.37
10.87
1812.12
33.00
113.07
1958.51
1958.51
#1
108.34
0.23
9.51
1468.59
687.43
1271.08
3427.10
3427.10
#2
144.47
0.25
10.92
5077.03
1861.93
1565.17
8507.64
8507.64
#3
187.63
0.20
12.41
11697.71
5713.84
2793.80
20204.65
20204.65
サンシールド
236.58
15.02
14.06
2187171.20
15250.53
4954.13
2207375.85
2207375.85
非定常熱解析では、鏡部の質量は 40kg とし、比熱は他の部位と同じ CFRP のものを用
いる。熱平衡方程式は
Ci mi
( 4
)
dT
= ai+1,j Ti+1
− Ti4 + bi+1,i (Ti+1 − Ti )
dt
(
)
4
−ai,S Ti4 − ai,i−1 Ti4 − Ti−1
− bi,i−1 (Ti − Ti−1 )
(4.5)
を線形化した
Ci mi
{
}
∆Ti
4
= ai+1,j (Ti+1 + ∆Ti+1 ) − Ti4 + bi+1,j {(Ti+1 + ∆Ti+1 ) − Ti }
∆t
(
)
4
−ai,s Ti4 − ai,i−1 Ti4 − Ti−1
(4.6)
− bi,i−1 (Ti − Ti−1 )
を用いている (JAXA における集中検討レポート (2008 年 3 月) より)。ここで、Ci :比
熱、mi :質量、Ti :温度、t:時間であり、添字 i は i 番目の部位のものであることを示
している。また、ai+1,i :i + 1 番目の部位から i 番目の部位への熱放射コンダクタンス、
bi+1,i:i + 1 番目の部位から i 番目の部位への熱伝導コンダクタンス、ai,s:i 番目の部位
4.7 素材
65
表 4.11 非定常熱解析条件。JAXA における集中検討レポート (2008 年 3 月) より。
鏡部温度変動 [K]:Δ T0
0.004(要求 (1) 鏡部温度安定度)
時間 [h]:Δ t
10
太陽からの熱放射の変動 [W/m2]
20(入射角度が観測範囲 10[deg] だけ変動する)
シールド (A6061) 密度 [kg/m3]
2700
表 4.12 非定常熱解析結果。JAXA における集中検討レポート (2008 年 3 月) より。
熱シールド
鏡部
鏡筒
#1
#2
#3
サンシールド
50.00
58.30
108.34
144.47
187.63
236.58
-
1.9
1.9
1.9
1.9
1.898
40
62.04
52.83
60.34
68.31
76.96
比熱 [W/kg/K]
148.84
205.84
529.04
688.60
804.99
878.99
温度変動 [K]:Δ T
0.004
0.036
0.232
1.500
6.577
17.40
許容熱変動 [mW]
0.6615
12.64
179.86
1731.32
10046.63
32701.86
入力熱変動 [mW]
0.6615
12.64
179.86
1731.32
10046.63
32701.86
温度 [K]
シールド厚さ [mm]
質量 [kg]
鏡筒およびシールドの質量和= 360kg
から深宇宙への熱放射コンダクタンスである。 本来は、式 (4.5) を解析的にもしくは差
分方程式に直して、∆Ti に対する ∆Ti+1 を求めるが、今回は計算の簡便化のために、下
記の式を満たすように ∆Ti+1 を求めている。
従って、360kg 程度の熱遮蔽材を用いることで、この衛星が要求する温度安定を達成す
ることが可能な解がみつかった。ただし、L-2 点での外部熱環境を仮定しており、打ち上
げ機会や通信レートなどを考慮してさらに近い軌道を採用した場合にこの解析結果がどの
程度変更されるかは、今後詳細に検討する必要がある。
4.7 素材
JASMINE では、高精度位置決定をおこなうため、望遠鏡の鏡や構造体の歪みは最小限
に抑える必要がある。したがって、素材選びは鏡や構造体の歪みと強く結びつき、重要な
検討課題である。10 時間観測を行なう間、望遠鏡部の変動を、およそ 100 pm以内に抑
える必要がある。JASMINE ではおよそ 50[K] あたりの低温での運用を行なうので、低
温における物性の特性が良いものが有利である。
CFRP は低温から高温領域にかけて膨張率が小さく、膨張率の観点から言えば、すぐ
れた素材の一つである。従って、構造体などに用いる候補の一つとなる。ただし、非等方
的な性質をもち、直接研磨が出来ないので鏡に用いるほど、開発は進んでいないと考えら
れる。
ガラスセラミックスの zerodur は常温で膨張率を小さく抑えられている超低膨張素材で
あるが、ターゲットとする温度を外れると膨張率は大きくなる。また、熱伝導性がわるく
66
第 4 章 観測装置および衛星システムのデザイン
温度むらの影響がある。これは鏡面の歪みに影響し、問題となる。重量も重く軽量化する
のは非常に困難である。
一方、SiC の場合、低温において膨張率がかなり小さくなり、候補の一つといえる。ま
た、鏡、構造体ともに同一の材質での製作が可能となり、熱変形は理想的には相似的変形
となるので、影響を受けにくくする事が可能である。
今後詳細に検討をする必要があるが、現段階では SiC が有力候補となっている。その
SiC にも様々な種類が存在するが、それに関しても今後検討の必要がある。
最後に図 4.31 で鏡材ごとの鏡面凹凸と、鏡サイズ変動量を表す。zerodur、ULE は鏡
サイズ変動量は小さいが、熱伝導が小さいため、鏡面凹凸が大きくなる。CFRP は良い特
性を示すが、鏡材としては、研磨できないなど、まだ課題が残る。SiC を低温のもとで用
いると鏡サイズ変動、鏡面凹凸ともに良い。
図 4.31 鏡面凹凸及び鏡サイズ変動量。各鏡材における鏡サイズ変動と、鏡面凹凸を
表す。薄い網掛けの領域が両者とも要求を満たす。濃い網掛けの領域は鏡サイズ変動
が要求を超えているが、変動量をモニターし、補正できる可能性のある領域。
4.8 質量
ミッション機器の中で質量の大半を占めるのは、望遠鏡である。現在望遠鏡の素材とし
ては 3 種類の候補を検討している。*1 。素材については 16.2.3 章を参照。
*1
質量推定の根拠は、SiC の場合は NGST で 30kg/m2 を達成していることから、使用する全ての鏡の面
積の総合計を算出して 30kg/m2 を適用すると、27.7kg となる。ただし、NGST は 6m 鏡であり、80cm
鏡と比べて m2 あたりの重量が同じとしたのは過大評価である。6m 鏡の重さを 80cm に D 3 でスケー
ルさせれば主鏡のみで 2.5kg 程度である。
4.9 通信
ただし、現在の検討では、熱環境を達成するために、遮蔽板にかなりの質量を割くこと
になるという検討報告がされている。
光学ベンチも熱設計と構造設計を考慮しつつ素材依存、電子回路、モニター装置、調節
機構などについては早急に検討する。
4.9 通信
視野に 1 万個程度の星が入り、2.4 秒程度でこれらの星像のデータをダウンリンクす
る必要がある。各星像は 5 × 5 × 16 = 400bit に多少付加情報を付け加えたものとなる。
従って、平均 2Mbit/s 程度の通信が必要である。
実際には、2.3 秒露出、0.13 秒読み出しを 8 回繰り返し、8 秒程度の姿勢制御をおこな
う、約 27 秒が一サイクルとなる。centroiding の処理を機上でできれば、1 万個の星の情
報を 2.4 秒で取得するという要求は、1 万個の星の情報を 27 秒で取得するという要求に
緩和される。この場合、150kbit/s の通信量で良い。
上の評価には、可視時間の割合は考慮していない。したがって、これらの数値を可視時
間の割合で割ったものが、必要な通信回線速度となる。
もし、1Gbps 程度の常時通信回線が確保可能なら、常時全画像をダウンロードすること
ができる。こうすることが可能なら、さまざまな誤差要因を地上で詳細に検討できる可能
性もある。
4.10 電源
ミッション系の電力は、検出器および OBC が主である。いずれも TBD。
電源系は検出器および制御基盤などについては他ミッションで現在試作品があるもの
の、低電力化が進行中である。VPU の必要電源については、ミッションの時期のプロセッ
サ事情が現在は予測できないので数年後に検討するが、現状での他のミッションを参考に
する限り大きな問題となるものではない。調節機構は高圧系が必要かどうかを早急に検討
する。高圧系に対する要求以外は、電力的には常時稼動するものではないので対応可能。
ULE の場合は Solar-B が 55cm 鏡が 15kg であることと赤外シミュレーターが 1.6m 鏡で 983kg で
あることから、ほぼ D 4 でスケールするとした場合が 86kg、55cm での重量を D 3 で 75cm にスケール
すると 55kg となる。ZPF の場合は TBD。
67
68
第 4 章 観測装置および衛星システムのデザイン
4.11 運用
図 4.32 運用モードの状態遷移図
大まかな運用イメージは、図 4.32 のようになる。各運用モードは、以下のようなもの
である。
打ち上げ (launch) 衛星を打ち上げてから軌道投入するまでの運用
初期運用 (Initial Operation)
予定軌道に投入されたのち、機器の初期チェックアウトな
どを行う期間
通常観測 (Normal Observation)
通常の観測を行う。現仕様では連続的に小フレームを
作成する。ミッション機器のキャリブレーションのモードは、通常観測モードの中
で検討する必要がある。
ミッション機器キャリブレーション (Instrument calibration mode) 黄道光の観測などを
行って、ミッション機器の校正を行う。
システムチェックアウト (System check out)
定期的にホイールの巻き戻しや機器のチェ
ックなどを行う
緊急モード (Emergency mode)
機器に異常が発生した時に、これを修正したり、ソフト
ウエアの書き換えを行う
冬季観測モード (Winter Observation)
冬季間はバルジが見えないので、他の観測を行う。
69
第5章
誤差配分
5.1 概要
5.1.1 概要
3.2 章で述べたように、JASMINE 自体の解析は 3 段階となる。この順序に従って、エ
ラーバジェットを評価してゆく。詳細は、章末の表 5.7 および appendix 参照 (G.2, H.2,
I.2, J.2)。誤差はランダム誤差と系統誤差に分けることが出来る。ランダム誤差は、統計
的処理により減少させることができるもので、ここでは、光子数をより多く獲得すること
によって減少できるものである。つまり、望遠鏡の口径や視野サイズ、観測年数を大きく
とることで対処する可能性が残されているものである。誤差がランダム誤差であることを
判定する基準は、光子数を無限大とした極限で誤差がゼロになることが期待できるもので
ある。一方、系統誤差は、”校正”により減少させることができるものであり、「測定」や
「制御」などの方法をとる場合がある。
本章ではランダム誤差と系統誤差に分けて、それぞれの誤差に対して観測手法の各ス
テージ毎での誤差要因を説明する。
5.2 ランダム誤差要因
5.2.1 全体
統計誤差は、観測装置の仕様や観測時間の配分などから定まる。これは、以下の式 (3.1)
に示すとおりである。
)−4 (
)−1 (
)−1 (
)(
)2
T
ΩFOV
Ωmission
λ
D
80cm
0.26yr
0.98◦ × 0.98◦
20◦ × 10◦
2µm
(
)−1 (
)
−1
∆λ/λ
ϵ
(
2
σpnl
= (10µas)
2
tot
0.5
0.7
これを表にあらわすと、図 14.1 及び表 5.1 のようになる。
実際には、さまざまな誤差要因によって、ここで示される観測時間 t0 = 0.12yr では目
標の年周視差精度 10µas を出すことはできない。
そこで、観測各ステップごとにどの程度の誤差があり、どの程度の精度が出せ、それを
達成するためにそれぞれのステップにどの程度の時間が必要かるかについて、以下のサブ
セクションで簡単にまとめる。詳細は 14 章に記述する。
70
第5章
誤差配分
1.5µm ∼ 2.5µ
波長
E0 = 740Jy を仮定
目標等級
11
星像内に入る光子の比率 (Rw )
0.63
光子流束
スループット
0.7
Fm = 4.4 × 104 個/s
口径/内径比
80cm / 0.35
分散 (光子あたり)
光子分散係数 ca
0.5
σ1 = 258mas
λ/D/pixel
1.8
焦点距離
pixel サイズ
20µm
f = 14.4m
pixel 数/検出器
2048 × 2048
視野サイズ
検出器数
6×6
0.98◦ × 0.98◦
目標精度
10µas
理想的時間
撮像領域
◦
10 × 20
連結数
視野移動比率
0.5 × 0.5
22 × 44
中心 pixel 比率
Rc = 0.24
撮像時間
full well
Ne = 150000
2.24s
サチる等級
ms = 9
t0 = 0.12yr
◦
表 5.1 理想的な場合の仕様検討表
5.2.2 Stage1
光子の分散
波面誤差
姿勢擾乱誤差
読み出しノイズ誤差
Voptics
Vatt
Vreadout
∏
Vtotal = V
σin
258mas
波面誤差 λ/8
1.051
100mas/2.4sec
1.16
18e
−
1.055
1.29
9.9 × 104 個
光子の数
N
星像中心推定精度
σout
光子の頻度
t
2.3 × 10−5 sec
読み出し時間/露出時間
tread
0.125 秒
合計
tN + tread
2.37 sec
√
= σin V /N
929µas
表 5.2 1 撮像における誤差要因
stage1 は、統計誤差としては 1 回撮像における誤差と数回の撮像データから星像中心
を求める誤差が含まれている。最初に 1 回の撮像に伴う誤差を表 5.2 にまとめる。ここ
で、V は rigidity の逆数で、1 より大きな数でパラメータの選択と解析手法から決まる量
2
2
である。出力パラメータの統計的な推定分散 σout
が、入力パラメータの分散 σin
とデー
5.2 ランダム誤差要因
2
タ数 N に対して σout
=
71
V 2
σ で決まることをあらわす係数である。
N in
σin
929µas
0.003pixel
1.86
小フレーム数/撮像
N
8
精度
σout
452µas
撮像時間 (含読み出し)
t
2.37sec
静定時間
tsettle
8sec
tN + tsettle − tread
26.8 sec
centroid システム誤差
合計
Vcentroid
※
表 5.3 小フレーム構築 (stage1) の誤差要因。※最後の一回の読み出しは姿勢制御と
同時に行うので、撮像 8 回、読み出し 7 回、静定 1 回の合計。
次に、centroid に伴う誤差は、表 5.3 のようになる。
姿勢安定度
ランダムノイズの中で最も大きな要因である。星像中心を求める際、望遠鏡の指向安
定度に起因する星像のボケによる誤差がもっとも厳しいものである。姿勢安定度要求は、
星像の中心を精度良く求めるために、およそ pixel on the sky の 0.4 倍程度を要求する。
D = 80cm の時、pixel on the sky は約 287mas なので、要求値は 1σ = 103mas である。
安定度要求の時間スケールは、一回の撮像時間程度、約 2.2 秒 である。
JASMINE の仕様に対して、望遠鏡の指向安定性がどこまで達成できるかは、今後の検
討課題であるが、Solar-B(ひので)で実現している指向安定度(3σ で 300mas/10 秒)と
比較的近く、Solar-B の方法が参考となる。Tip-Tilt Mirror を用いることにより、実現
可能ではないかと見込んでいるが、詳細はこれからの重要課題の一つである。
しかし、安定度の達成そのものがミッションクリティカルではなく、安定度の悪さは
JASMINE の観測においてはランダム誤差に繰り込むことの出来る性質のもので、主鏡口
径を大きくするなど、他の仕様とのトレードオフによる対処方法はありうる。
*GAIA: 姿 勢 ノ イ ズ の パ ワ ー ス ペ ク ト ル 分 布 は f > 0.05Hz で PSD <
(
)2
0.05
1000
(µarcsec)2 /Hz を 達 成 し た と し て い る [project team et al., 2002]。ま た 、
f
FEEP を使うことで 1µN の精度 [project team et al., 2002] で推力を発生し、姿勢制御精度
はスキャン垂直方向に 0.01arcsec/s(3σ)、スキャン方向に 1 arcsec/s(3σ) の精度で制御可能
としている [Perryman, 2004]。
Readout noise
検出器の readout noise は、σe = 18 を想定している。この誤差は、星像中心を決める
上で大きくは効かない(エラーバジェット表を参照)。
望遠鏡の歪みによる星像ボケ
望遠鏡の歪みによる星像ボケは、打ち上げ後に、アクチュエータによる調整を行う。必
要な調整精度は、調整箇所によるが、例えば主鏡副鏡間では、2µm 程度と見込んでいる。
72
第5章
姿勢制御誤差
Vattc
大フレーム連結誤差
VLF
QSO 基準位置誤差
VQSO
σin
452µas
TBD
(1)
誤差配分
1.81
TBD
(1.01)
同じ領域で小フレームが重なる数
N
4個
精度
σout
305µas
小フレーム構築時間
t
26.8sec
小フレームの全数
N
968 個
短期運用時間
rshort
TBD
(0)
QSO 観測時間/星観測時間
rQSO
15 等、4 個
0.66
10.4hr
合計
表 5.5 大フレーム構築 (stage2) の誤差要因
調整機構など詳細は今後検討の予定。
スポットが回折限界以内に収まる Tolerance
Parameter
Value in µm
主鏡副鏡間距離
2
その他の距離
15
主鏡に対する副鏡の decenter
20
全ての tilt(鏡端)
20
表 5.4 ひずみ (打ち上げ前の測定値を打ち上げ後にどの程度再現可能であればよいか)
*GAIA: 参考資料 [project team et al., 2002] の 74–75 ページ参照。M2 の後にアクチュ
エーターを入れて調整している ([Safa, 2006] 参照)。
5.2.3 Stage2
小フレームの張り合わせによる大フレームの構築精度
小フレームを連結し、大フレームを構築する際は、小フレームどうしの重複領域にある
星の個数が小さいと photon 数ノイズで連結がうまくできない。ただ、JASMINE が観測
するバルジ領域は目標とする精度 (張り合わせの要求精度 3.5 マイクロ秒角以内) で連結
できるだけの十分な星の数があり、必要条件は満たしている(16.2.1 参照)。
姿勢制御
姿勢制御要求は、焦点面内に目的の星が入ることと、少しづつ視野をずらしたときに必
要な数だけ星が重複することから決まる。およそ視野の 1/5 程度あればよく、約 0.2◦ つ
まり約 12 分角程度である。ノミナル値は恒星センサーや太陽センサーで得られる。この
精度のセンサーは十分手に入る。
5.3 システム誤差要因
73
σin
305µas
30mK/10hr
熱安定
Vsystem
衛星位置精度
150km
2
1.5mm/s
衛星速度精度
parallax factor
Vpar
9 か月観測
1.65
TBD
(1)
数
N
3000 個
精度
10σout
µas
大フレーム構築時間
t
10.4hr
大フレームから全ミッション誤差
VLF2mission
rs
季節の係数
0.3333
4.9 yr
合計
表 5.6 大フレーム構築 (stage2) の誤差要因
5.2.4 Stage3
位置天文パラメータの導出精度
異なった大フレームの原点、方向を合わせて、位置天文パラメータを導出するが、stage2
と同様に、合わせるための必要な星の数は十分ある。
5.3 システム誤差要因
5.3.1 Stage1
離散化と打ち切りに伴う星像中心誤差
重心法による方法は確立 (16.1.1 参照)。
星の色による PSF のズレ
重心法でパラメータを追加することにより、推定可能である見込みがある。PSF 依存
のためより詳細な検討が必要だが、PSF をフィッティングするなど、より自由度の大きな
推定手法もあり、解決の見込みはついている。
宇宙線イベントの分離
系統誤差である。星像周辺に宇宙線を撮像することにより、星の中心位置を誤って推定
する効果が考えられる。同じ領域の撮像を短い時間に分けて複数回行う等の工夫を行い、
宇宙線による像の分離が可能。 5.3.2 Stage2
小フレーム毎のサイズと歪の誤差
系統誤差の中で最も大きな要因となる。1 の観測手法の stage 2 で前述したように、小
フレーム毎のサイズと歪みの変動が系統的な誤差として入る。この誤差を望みの値以内に
74
第5章
誤差配分
抑えられるかどうかが、大フレーム構築を成功させる、つまり、最終的に位置天文精度が
目標精度に達成できるかどうかの鍵となる。これを望遠鏡の geometry 変動に対する要求
に直すと、大フレームの構築時間以内(10 時間以内)に例えば、主鏡と副鏡間の時間変
動が約 200pm 以内に抑えると最終的には精度目標を達成することができる。検出器のサ
イズ変化に関しては、約 100pm 以内の変動を要求する。望遠鏡の構造変化に関しては、
望遠鏡周辺の温度変動に伴う、望遠鏡 geometry の変動と、構造体のゆっくりとした変形
(構造部分の放射線、オフガス等による劣化、加工、組み立て時に生じた応力の解放、重
力傾斜の影響など)にともなう geometry 変動が考えられる。
温度
温度要求は動作条件で誤差と係わらないが、温度安定性要求は上の項目のサイズのズレ
に係わる要求であるので、ここに記述する。
■温度要求
検出器のノミナル温度は HgCdTe の動作に最適な温度からきまる。動作温
度は、50K∼100K が最適温度である。
■温度安定度要求
◦
JASMINE では、視野 (小フレーム) を張り合わせることにより、
◦
20 × 10 領域全体の高精度なマップを構築する。この際、フレームの歪みや伸び縮み
があると、各小フレームから全体のマップを作る際の精度低下の大きな原因となる。こ
のため、小フレームの歪みや伸び縮みを抑える必要があるが、小フレームの歪みや伸び
縮みの大きな原因の一つが望遠鏡の歪みに由来するため、システムに対しては望遠鏡の
geometory 変動を抑えることを要求する。(検出器自体の発熱変動に伴う小フレームの歪
みや伸び縮みの変動もあり得る。16.2.2 章参照)
このように、温度安定度要求は望遠鏡の geometry 変動を抑えるという要求から来るも
のであり、さらに許容される温度変動要求は小フレームの歪みや伸び縮みの要求からくる
ものなので、使用する光学系の特性や素材の選択などに依存して変化し得る。おおまかな
計算によると、望遠鏡の主鏡副鏡間や副鏡焦点面間の距離、傾き、中心のずれの変動が数
十 pm オーダーになることを要求する。
現在、鏡の素材として SiC を考えている。熱膨張率は、50K で約 10−8 を達成している
SiC の種類も存在する。その場合、温度変動要求は、大フレーム構成時間以内に約 20mK
以内となる。
*GAIA: 一体型製作が可能であり温度管理が楽なことと軽量性から SiC を採用している。
熱モデル (数値解析) より、45µK の温度安定化が可能であると結論ている。この数値は、
80cm(GAIA の illumination system の腕の長さ) で 3.9pm(角度にして 1µarcsec) を達成す
るために必要な温度安定度 100µK を安全係数 2 で達成している [Perryman, 2004]。
衛星の速度
衛星が運動していることに伴う光行差の効果を補正する必要があるが、衛星の運動速度
の測定誤差が誤差要因となる。L2 軌道では、要求に満たす十分な精度で軌道推定が可能
である。近地球軌道を用いる場合、レンジングを用いた測定、GPS を用いた測定と軌道推
定を併用することで、位置精度は現状で 1km 程度まで可能、速度精度は 1.7mm/s 程度ま
5.3 システム誤差要因
で可能であるので、ほぼ目標精度は達成されている。従って、目標精度である 1.5mm/sec
は、達成精度から考えて十分達成可能だと思われる。なお、衛星の速度は目標精度で瞬時
瞬時に知る必要はなく、後からの解析で分かることで十分である。 衛星の位置
衛 星 の 位 置 が 変 わ る こ と に よ り 、星 の 見 か け の 位 置 が 変 動 す る が( 近 く の 星 ほ
ど 動 く )、そ の 動 き が 近 い 星 で も 誤 差 が 目 標 値 よ り も 十 分 小 さ く な る た め に は 、
衛 星 の 位 置 が 150km 以 内 の 誤 差 で 測 定 で き れ ば い い が 、現 在 の 技 術 で 達 成 見 込
み で あ る 。[歌島昌由, 2004k, 歌島昌由, 2004n, 歌島昌由, 2004a, 歌島昌由, 2004g,
歌島昌由, 2004m, 歌島昌由, 2004b, 歌島昌由, 2004j, 歌島昌由, 2004h, 歌島昌由, 2004i,
歌島昌由, 2004c, 歌島昌由, 2004l, 歌島昌由, 2004d, 歌島昌由, 2004e, 歌島昌由, 2004f]
(図 4.9 参照) なお、衛星の位置は目標精度で瞬時瞬時に知る必要はなく、後からの解析で
分かることで十分である。
太陽系内天体による重力レンズ効果
太陽系内天体による重力レンズ効果に伴う光路変更を補正する必要がある。補正には、
相対論的補正を行う形式構築と惑星軌道の情報が必要であるが、形式構築は整いつつある。
5.3.3 Stage3
星の運動モデル
星の運動モデルは、通常は、年周楕円と固有運動を取りいれたモデルを考える。ただ、
連星系、惑星系や重力レンズ効果を受けた星は違う運動が入るため、そのような場合は
(通常モデルによる統計解析後の誤差分散が大きくなることによって判別)、モデルを拡張
し、他の運動も取り入れ補正を行う。
QSO 光学中心の移動
観測手法で示したように、天球上での不動点としての QSO を使うことが、JASMINE
では大フレームの構築や位置天文パラメータの導出の際に重要である。詳しくは、QSO
の光学中心を不動とみなすが、この光学中心が、もし不動点ではなくて天球上を移動する
とすれば、それは、最終的には系統誤差で入ることになる。QSO の光学中心が移動する
原因としては、QSO の内部構造に起因するもの(例えば、QSO のジェット構造の変化)
や、重力レンズ効果によるものが考えられる。QSO の内部構造に起因するものは、赤外
線でのジェット構造の変化の度合いの研究や他波長での QSO の観測情報などをもとに校
正を試みる必要があるだろう。また、重力レンズ効果を受ける可能性は、約 1/1000 と小
さい。また、重力レンズ効果を受けている場合、他の QSO との位置の相対関係の移動か
ら校正をすることが可能な場合もある。しかし、一般にはその校正は困難と思われる。
75
76
第5章
誤差配分
5.3.4 誤差要因一覧
項目
達成値
目標値
備考
stage1 ランダム誤差
姿勢安定
Readout noise
>100mas/10s
103mas/2.2s
−
−
18e
18e
2µm
望遠鏡性能
達成値は SolarB(※ 2)
調節機構の精度、調査
中、推定可能
stage2 ランダム誤差
張り合わせ精度
3.5µas
3.5µas
◦
◦
視野内の星の個数に依
存
姿勢制御
0.12
0.12
stage3 ランダム誤差
大フレーム同士の合
3.5µas
3.5µas
星の数は十分
致
stage1 系統誤差
星像中心決定(切り
860µas
860µas
除去可能
<< 860µas
既存手法で可能
出しと色効果)
宇宙線
PSF の観測情報や同一
フレームの複数撮像な
どで Hot Spot を除去可
能
stage2 系統誤差
望 遠 鏡 geometory
200pm
変動
温度変動抑制、構造変化
のモデル化、変動のモニ
ター
100pm
検出器熱変動
長さで 10pm
モニター装置の誤差
衛星位置推定精度
変動モニター
1km
150km
L2 の場合、S バンドレ
ンジ& レンジレート
衛星速度推定精度
1.7mm/sec
1.5mm/sec
太陽系内天体の重力
光行差として効く (※ 1)
モデル化
レンズ効果
stage3 系統誤差
星の運動のモデル化
< 5µas
惑星系、連成系、重力レ
ンズ効果
QSO の 光 学 中 心 移
< 5µas
動
ジェット構造、重力レン
ズ効果
表 5.7 誤差要因と達成値目標値。
5.3 システム誤差要因
※1
値は静止軌道で GPS を用いる場合。レンジ& レンジレートを用いる場合は
5mm/sec 程度。L2 では 1mm/sec 達成 [歌島昌由, 2006]。
※2
3σ で 10 秒で 0.3arcsec をもとにして、我々の要求値は 1σ であることからこれを
1/3 したものである。
77
78
第5章
図 5.1 エラーバジェットのまとめ
誤差配分
79
第6章
技術的課題
6.1 はじめに
2007 年度は JAXA システムエンジニアリング推進室と総合技術研究本部のメンバーに
ご参加いただき、「集中検討」を行ってきた。その中で、装置・サイエンス・衛星システ
ム全般にわたる幅広い検討を行ってきた。この章では、ここで議論されてきた課題をまと
める。
6.2 から 6.6 までは、おもにミッション機器について、ミッション側の検討をまとめた
ものである。6.7 は、おもに衛星システム、姿勢系、軌道、熱・構造系などに関する検討の
報告である。この部分は、宇宙航空研究開発機構総合技術研究本部・宇宙構造技術グルー
プ・宇宙熱技術グループ・誘導・制御技術グループ・システムズエンジニアリング推進室
エンジニアリンググループミッションデザイン支援グループの方々に執筆いただいたもの
である。
これらを、最後にリストとしてまとめた。
6.2 光学系の課題と実証手順
光学設計
JASMINE の光学系の候補として、on-axis 光学系と off-axis 光学系の両方から検討を進
めている。on-axis は光学系が対称的な事から収差も対称的となる。また、光軸に近い部
分を用いるので、性能も出やすい。しかし、3 枚鏡における on-axis 光学系は光路を確保
するのが困難である。従って、広視野の光学系を設計するのが非常に困難である。また、
副鏡などにより、光路が遮蔽されるとエネルギーのロスにつながる。一方、off-axis 光学
系は副鏡による PSF の劣化もなくエネルギーのロスも少ない。その上、焦点面サイズに
ついては on-axis と比較して、鏡や検出器の配置において物理的な制限が弱い。しかし、
収差は非対称であり、光路は光軸からは離れるので収差も大きり補正するのが困難であ
る。両者一長一短ではあるが、現在のところ、on-axis の方が、要求を満たす光学系を設
計しやすい状況であり、今後詳細に検討をすすめ決定する。
材料
JASMINE 望遠鏡の材質は重要課題の一つである。鏡材として、SiC が最も有力な候補の
一つである。それは、JASMINE の望遠鏡部の運用温度である 50K で膨張係数が十分に
小さい事があげられる。最近低温での SiC の膨張率が精密に測定され始めている。その
80
第 6 章 技術的課題
他、SiC の場合には鏡と望遠鏡構造体を同一の材質で製作が可能となる。そうすると、熱
変形の際、相似的変形をするので、熱膨張の影響を受けにくくする事が可能だからである。
SiC に関しては、多くの種類があり、今後、様々な観点から最も適した SiC を選び出す
必要がある。
鏡の製作
JASMINE の要求を満たすために、長焦点広視野の光学系が必要となる。以上の仕様を達
成するためには 3 枚鏡の光学系が必須となる。現在中心に検討を進めている on-axis 光学
系では光路がうまく取れるようにするため、F 1 という焦点距離が短い主鏡を必要とす
る。このような短焦点の主鏡が作れるかどうかが今後課題となる。サジェムではすでにF
1の鏡を製作した実績を持っている。したがって、この会社が JASMINE の鏡を作る候
補の一つとなり得る。
望遠鏡の組立
リッチークレチアン望遠鏡のような 2 枚鏡の光学系は多くの天文台や、HSTをはじめと
するスペースの望遠鏡などで広く用いられている。しかし、JASMINE は長焦点、広視野
の光学系が必要なので、3 枚鏡を採用している。その結果、2 枚鏡に比べて、3 枚鏡は望
遠鏡の組立が非常に困難になる。従って、今後、組立の方法、手順など、課題となる。し
かし、3 枚鏡はすでに GAIA でも採用されている。したがって GAIA の光学系の組立が
良い参考となるだろう。
6.3 星像中心解析に関する課題と実証手順
JASMINE では K-band を含む、2.0µm を中心としたバンド幅 1.5µm ≤ λ ≤ 2.5µm
で観測を行なう予定である。このような広いバンド幅を用いた観測では星像中心を測定す
る際の色の影響が問題となる。そこで、星像中心決定の際にどのような色の誤差が発生
し、どのようにその誤差を補正するかを検討する。また、その色による系統誤差を取り除
くためのアルゴリズムを開発する事が課題となる。最終的に星像中心決定の実験をおこな
い、実際に色の誤差が取り除けるかどうかを確かめる予定である。
6.4 検出器に関する課題と実証手順
検出器として、赤外線アレイ検出器を利用する予定である。この検出器を制御するため
の電子系の開発が必要である。画像データを落とした後の処理については、CCD 検出器
を使った Nano-JASMINE ミッションで開発中である。したがって、JASMINE 固有の
部分は赤外線検出器特有の読み出し部分に関する開発となる。
JASMINE では、焦点面上にこの検出器を 6 × 6 程度並べる予定である。狭い焦点面を
できるだけ有効に利用するため、密に精度よく検出器を配列するための技術開発が必要で
ある。実際に、VISTA と呼ばれる広視野望遠鏡で、4 × 4 の配列実績がある。JASMINE
の開発項目は、この延長上にある。
HgCdTe アレイ検出器は、日本でも広く地上望遠鏡に利用されているが、スペースでの
利用は今のところ日本では未経験である。そのため、宇宙線対策など、スペース特有の問
題については、検討する必要がある。
検出器のキャリブレーションについては、地上では空の散乱光などを観測することに
6.5 モニター装置の課題と実証手順
よって行うが、スペースの場合は黄道光を観測するなどしてキャリブレーションを行う。
これについては、運用スケジュールと関連して、必要なキャリブレーションの頻度などを
検討する必要がある。
6.5 モニター装置の課題と実証手順
6.5.1 モニター装置の開発要素
望遠鏡の変形のよる視野の歪みや伸び縮みは、星の位置推定に悪影響を与える。そのた
め、モニター装置によって望遠鏡の変形をモニターする必要がある。どの部分をどの程度
の精度でモニターすれば良いかは、構造や熱設計と絡んだ詳細なものは現在光学系シミュ
レーションで検討中であるが、見込みは付けられている。さらに、その精度が開発するモ
ニター装置で実現可能かは、今後モニター装置の誤差をどこまで低くできるかの検討にか
かっている。モニター装置の開発は、現在順調に行なわれている。最終的に 10 μ秒角の
位置天文精度を出すためには、小フレームの拡大・縮小や歪みの変動成分を必要な精度で
モニターすることが非常に重要な課題である。我々の解析によれば、主鏡と副鏡間等の長
さ変動、鏡の口径変動と焦点面上での検出器に対する長さ変動を約 10pm の精度でモニ
ターする必要がある。このような高精度でモニターできる装置としては、レーザー干渉計
を用いたものが有力候補である。開発すべき技術要素としては
• 赤外線検出器や鏡のサイズ変動を測定する「レーザー干渉計型歪みモニター」
• 望遠鏡の光学素子間の幾何学的な配置の時間変動を測定する「レーザー干渉計型望
遠鏡ジオメトリモニター」
• これらの測定を高精度で行うことを可能にする周波数安定化レーザー
が必要となる(図 6.1 参照)。最終的には JASMINE の要求精度を実現するための地上実
証機を開発し、そこへ各要素を組み込んでいく。
81
82
第 6 章 技術的課題
図 6.1
モニター装置の主な開発要素 3 項目
ここであげた各項目は、周波数標準の研究やレーザー干渉計型重力波検出器の開発と
いった分野で既に実績のある技術を応用しており、原理的には JASMINE で要求される
精度を満たすものである。実際、従来の JASMINE でビーム混合鏡角を 10 μ秒角以内の
精度で計測するために開発を行ってきたレーザー干渉計型ベーシックアングルモニタで
も、同様のレーザー周波数安定化技術、干渉波面位相差の検出技術を用いて来た。新しい
バージョンの干渉計型モニターはそれらの基礎技術を延長することで実現できるもので
ある。
しかしながら、JASMINE に特化した部分については、独自の研究開発を進めなければ
ならない。これまでに確認されている干渉計の性能・レーザー安定度の性能は、JASMINE
の大フレーム観測時間スケール (10 時間) という長時間では要求精度に達していない。ま
た、JASMINE の観測スキーム中で「知りたい」情報は、具体的にどのような装置方式を
とることで得られるのか、という点についても実際に実験をして示していく必要がある。
現在のモニター装置の開発状況であるが、2007 年度より「望遠鏡ジオメトリモニター」
の実証実験を開始している。これは望遠鏡のような大構造物に干渉計型モニターを取り付
け、その位置や姿勢の変動を実際的なセットアップで実証することを目的とする実験であ
る。同様の光学系安定化システムは NASA で計画されている JWST 衛星の地上試験、も
しくは TPF-C 衛星の機上での副鏡安定化などで検討されているが、装置方式については
まだ確定しておらず、やはり我々独自の研究が必要となる項目である。「望遠鏡ジオメト
リモニター」開発手順として、
1. レーザー干渉計を用いた多自由度測定の実証
2. レーザー干渉計を用いた 1 自由度測定による JASMINE 要求精度の実証
3. レーザー干渉計を用いた 1m スケールの構造物の JASMINE の要求精度での実測
6.5 モニター装置の課題と実証手順
の順番に実験を進めていく予定である。
6.5.2 モニター装置の開発状況
モニター装置の開発として、これまでに望遠鏡ジオメトリーモニターの開発を進めてき
た。その進捗状況をまとめる。
3 自由度望遠鏡ジオメトリー変動モニター動作実験
レーザー干渉計型望遠鏡ジオメトリーモニターの動作実験として、高さ 0.5m の構造体
にマウントされた鏡の動きに対して、3 自由度 (Yaw、Pitch、Length) でモニターする実
験を行った。具体的には、光学ベンチ上に 4 組のヘテロダイン型干渉計を配置し、ター
ゲットとなる鏡と光学ベンチ間の長さ変動を同時に 4 箇所で測定した。このとき、測定が
冗長となるが、これは、4 箇所の測定が測定精度以内で無矛盾であることを確認するため
である。光学系のデザインと実際にセットアップした光学系を Fig.6.2 と Fig.6.3 に示し
た。光学系の概要は以下のとおりである。
• 光学系は 300mm × 300mm のレーザーベンチと 600mm × 600mm の光学ベンチ
上に設置。
• レーザーベンチ上には、光源として Nd:YAG レーザー、波長 1064nm を設置。ま
た、AOM を 2 台使用して、互いに周波数差 50kHz を持つ 2 本のレーザーを生成。
• 光学ベンチ上では、リファレンス信号取得のための干渉計 1 つ、ターゲットの鏡の
動きをモニターするための干渉計 4 つ、周波数雑音を測定するための干渉計 1 つ、
計 6 つのヘテロダイン型マッハ・ツェンダーレーザー干渉計を配置。
• ターゲットの鏡の動きをモニターするための干渉計の総光路長は 2.5m。
ターゲットの鏡には、PZT アクチュエータがとりつけてあり、既知の量だけあたえられ
た変動に対して、その大きさをモニターするデモンストレーションを行った。実験の結
果、Length 方向、Pitch 方向、Yaw 方向、各方向に対して正常にその動きがモニターさ
れることがわかった。
83
84
第 6 章 技術的課題
図 6.2
図 6.3
鏡の動きに対する 3 自由度同時測定のための光学系デザイン
鏡の動きに対する 3 自由度同時測定のための光学系セットアップ
リファレンス信号の安定化
望遠鏡ジオメトリーの微小変動量測定方法として、ヘテロダイン型レーザー干渉計を用
いて、2 本の光路長の差動変動量を測定する方法を用いる。ヘテロダイン型レーザー干渉
計を用いて測距を行う場合には、光路長の差動変動の情報を位相変化として持っている
ヘテロダイン信号とその情報を読み出すために位相比較をするリファレンス信号が必要
である。また、その信号の位相安定度に対しては、変位に換算すると、JASMINE で必
6.5 モニター装置の課題と実証手順
要なモニター精度 10 pm と同等、すなわち 10−4 rad の安定度が要求される。そこで、リ
ファレンス信号の位相を安定化するために、Phase-locked loop(PLL) と呼ばれるフィー
ドバック制御を行い、位相の安定化を試みた。これまでに、1 秒から 10 時間の RMS 値
で、10−3 rad の位相安定度 (変位測定精度に換算すると 100 pm に相当する) を達成して
いる。
図 6.4 リファレンス信号の位相安定度のパワースペクトル密度。濃い色の線は 1Hz
から各周波数までの帯域での RMS 値を示している。
レーザー干渉計型モニター性能テスト
レーザー干渉計型モニターの性能をテストするために、光学ベンチ上に設置している 4
つのヘテロダイン型マッハ・ツェンダーレーザー干渉計のうちの 1 つを用いて、長時間で
の変位量測定を行った。なお、測定は、大気中で行い、干渉計周りの温度制御は行ってい
ない。測定された変位量の時系列データとスペクトルデータを Fig.6.5 と Fig.6.6 にそれ
ぞれ示す。1 秒から 10 時間の間の変位の RMS 値は、0.86 μ m だった。Fig.6.5 には、
同時に測定した温度変動のデータも示しているが、変位量のデータとの間には、強い相関
が見られる。従って、測定された変位量は、温度変動にともなう光学ベンチの膨張、収縮
に因るところが大きいと推定される。従って、今後、JASMINE の要求精度を達成するた
めには、このような雑音の大きさを小さくする、あるいは、雑音の影響を受けないような
構成にするといった工夫が必要である。まずは、外乱の影響を受けないように干渉計のサ
イズを小型化し、温度安定化システム導入した上で、真空中での測定を行うことを考えて
いる。
85
86
第 6 章 技術的課題
図 6.5 光学ベンチ上に設置している 4 つのヘテロダイン型マッハ・ツェンダーレー
ザー干渉計のうちの 1 つを用いて測定された変位量の時系列データを length flux の線
で示している。tmp fluc の線は、同時に測定した光学ベンチの温度勾配。
図 6.6 光学ベンチ上に設置している 4 つのヘテロダイン型マッハ・ツェンダーレー
ザー干渉計のうちの 1 つを用いて測定された変位量の時系列データをパワースペクト
ル密度に変換したものを線で示している。なめらかな色の濃い線は 1Hz から各周波数
までの帯域での RMS 値を示している。
6.5.3 モニター装置の今後の開発
レーザー干渉計型望遠鏡ジオメトリモニター
レーザー干渉計を用いた望遠鏡ジオメトリモニターの開発は、2007 年度より始めらて
おり、これまでに、多自由度測定の実証実験として、鏡の動きに対する、3 自由度同時測
定の検証が行われ、目論見どおり、そのような測定が可能であることが確認された。ま
た、今後さらに多自由度の測定が必要となった場合でも、容易に拡張できることがわかっ
6.6 放射線の影響に関する課題と実証手順
た。2008 年度より「レーザー干渉計の感度実証実験」に取り組む。望遠鏡ジオメトリモ
ニターに使用するヘテロダイン型レーザー干渉計の感度が、10 時間のタイムスケールで
JASMINE の要求精度 10pm に到達することの実証を目指す。長時間の測定では、温度
変動によるドリフトが干渉計の感度を悪化させるので、その対策として、低熱膨張率ガラ
ス製の光学ベンチに光学系を化学的に融着させた干渉計を構築する。干渉計のデザイン
は、できるだけ外乱の影響を受けないように、できるだけ小さなサイズにしたり、対称な
形にするなどの工夫をする。また、干渉計全体を真空槽内に設置し、さらに多層熱シール
ドで囲むことで受動的に熱絶縁する。加えて、この真空槽自体を能動温度制御された安定
な環境に設置し、測定を行う。
レーザー干渉計型歪みモニター
赤外線検出器開発グループと共同で行う計画である。
レーザー周波数安定化
レーザー光源としてはこれまでのモニター開発で使用してきた Nd:YAG レーザーをそ
のまま利用するため、レーザー周波数安定化システムはそのまま流用できるが、JASMINE
の要求レベルを満たす安定度は得られず、その点は今後の開発にゆだねられる。 今後の
開発では、大フレーム構築のタイムスケールである、1 秒から 10 時間の間で 10−11 の周
波数安定度
δν
δλ
ν (波長安定度 λ )
を持つレーザーとして、アセチレンまたはヨウ素のガス吸
収線で安定化したレーザーの検討・開発を行う。
6.6 放射線の影響に関する課題と実証手順
望遠鏡の構造部材、鏡面 (反射率など)、検出器、オンボード電子回路系の放射線の影響
について評価が必要である。オンボード計算機については、Nano-JASMINE ではすでに
FPGA の評価を開始しており、比較的高性能な FPGA が利用可能であれば、JASMINE
処理系に応用できる。しかしながら、JASMINE の運用軌道は Nano-JASMINE(LEO)
と異なって、最低でも静止軌道、場合によっては太陽-地球 L2 軌道での運用となり、放射
線環境も異なり、また運用期間も 5 年以上にわたるため、さらに詳細な検討が必要となる。
6.7 衛星システム検討
2007 年度の約一年間をかけて、JAXA システムズエンジニアリング推進室および総
合技術研究本部のメンバー約 10 名にご協力いただき、集中検討を行った。その結果、
JASMINE を実現するための問題点は、熱膨張率の低い素材を使い、さらに温度安定を実
現する、いわゆる熱管理の問題にほぼ集約できることが分かった。熱変動の問題は、シス
テム誤差に関連するもので、目標精度の 10µas のオーダーの要求値になる。
姿勢制御も同様に厳しい要求ではあるが、こちらは統計誤差に係わるものであり、現状
の高精度の天文衛星の要求値とほぼ同じオーダーのものであり、実現可能な範囲にある。
熱の要求は大フレーム構築時間 (約 10 時間) 以内に望遠鏡構造の変動を 50pm 程度に
抑えるという要求であり、これは熱膨張率 10−8 /K の素材を用いれば 40mK、10−7 /K 程
度の素材を用いると 4mK 程度という要求値になる。これを実現するためには外部熱入力
87
88
第 6 章 技術的課題
HISO (静止高
度)
← 難しい
数 nm
軌道
温度安定
系統誤差
通 信 速 度 (L2
1265 倍
HCPO (17 万
km)
HCPO (60 万
km)
L2
数 百 pm 程
数十 pm∼数百
数十 pm
度?
pm 程度?
6倍
1 倍 (※)
→ 容易
–
56 倍
との比)
姿勢
静定時間要求実現に、チップチルトを開発が必要
運用
打上 (相乗り)
科学的成果
課題
← 容易
–
△(打上げ制約
△(打上げ制約
→ 臼田占有など要検討
△/○ (軌 道 面 ×(他の L2 衛
は、地球との角
は、地球との角
は衛星で制御
度関係に依存)
度関係に依存)
可能)
←(QSO 付近は正確に取れる)
–
星を探す)
→(バルジ全領域)
系統誤差を抑
温度安定性が
やや高コスト。 コ ス ト お よ び
える熱制御の
やや懸念
アンテナや運
改善など
通信系
用面
(※):ハイゲインパラボラアンテナが必要。姿勢擾乱とトレードオフ
表 6.1
軌道トレードオフ。JAXA 集中検討資料より必要部分を抜粋。
変動を小さく抑えるための軌道選択が必要だが、これは一方でデータ転送量を制約するこ
とになり、トレードオフ項目となる。姿勢制御に要する時間を短くすることは運用デュー
ティーの上で重要だが、現状で 0.5◦ 程度の姿勢制御後十分安定な状態に衛星姿勢を止め
る (静定) ためには、約 8∼15 秒程度かかる。位置天文観測で精度を出すためには光子を
たくさん集めることが重要であり、このためには運用デューティーを高くしなければなら
ない。この 8 秒という時間が運用デューティーを大きく低下させないためには、小フレー
ムの撮像にある程度時間をかけ、姿勢変更の頻度を小さくする必要がある。これは、大フ
レーム構築時間を長くすることになり、これをトレードオフした結果、大フレーム構築時
間約 10 時間とする現在のオプションが最適な解であることが分かった。
JASMINE ミッションは、基本要求は解析後の精度が目標精度に達することであり、こ
れは解析の手法にも依存し、また軌道・熱・姿勢・通信・運用デューティーなどが複雑に
絡み合っており、今後も継続的に検討を進める必要があることが認識された。
さらに、JASMINE 非常に高精度なミッションであるため、従来の衛星では問題にな
らなかったような変形要因をについても問題になるかどうかの評価が必要であると指
摘された。たとえば衛星に働く潮汐力の変形や、素材の永年変形などがそれにあたる。
JASMINE の要求である 10 時間で 50pm という値は、1 年間で 40nm 程度となり、メー
トル原器の精度に匹敵するものである。
潮汐力の影響による変形の評価をすると、以下のようになる。静止軌道上の重力と遠心
力のつりあいの式
m
mνc2
−µ 2 =0
r
r
r = 42164 × 103 [m]
µ = 3.986 × 1014 [m3 /s2 ]
√
µ
νc =
= 3075[m/s]
r
6.7 衛星システム検討
図 6.7
89
概念図。JAXA における集中検討レポート (2008 年 3 月) より。鏡筒姿勢角
を θ とし、衛星重心から鏡筒長手方向に沿う方向を x 軸とする。鏡筒上の位置 x にお
ける軌道からの距離 ∆r は、x sin θ である。
より、遠心力と重力の差を r(地球重心からの距離)で微分する。
d
dr
(
mνc2
m
−µ 2
r
r
)
(
= −m
(
= −m
νc2
2µ
+ 3
2
r
r
)
30752
2
(42168 × 103 )
+
2 × 3.986 × 1014
3
(42164 × 103 )
)
= 1.6 × 108 m = am
静止軌道から軌道半径方向に 1m 離れると、1kg あたり 1.6 × 10−8 [N] の力が作用するこ
とになる。
単純に、JASMINE の鏡筒を均一断面の図 6.7 のようなカンチレバー(密度 rho、断面
積 S )でモデル化するとき、位置の微小長さ部分に働く潮汐力のうち、カンチレバーを曲
げる方向の成分は、
am∆r cos θ = aρS∆x(x sin θ) cos θ =
1
aρSx∆x sin 2θ
2
であらわされる。これより、θ = 45◦ のときに潮汐力が最大の曲げモーメントを生じるこ
とがわかる。
θ = 45◦ の場合、潮汐力は、鏡筒長手方向に対して線形に増加するので、カンチレバー
に図 6.8 のような分布荷重が作用する時の先端のたわみを求ればよい。このとき、先端の
たわみは以下で表せる。
νmax =
11w1 + 4w2 4
l
120EI
l = 2[m], x1 = 2.5[m], x2 = 0.5[m] とすると、
1
aρSx1 = 2 × 10−11 ρS
2
1
w2 = aρSx2 = 4 × 10−12 ρS
2
ρS
νmax = 3.1 × 10−8
EI
w1 =
24 時間周期でこのオーダーの変形が生じるとすると、その値は無視できなくなり、特に
衛星重心から離れた位置に重量物(副鏡など)がある場合には注意を要する。
90
第 6 章 技術的課題
図 6.8
概念図。JAXA における集中検討レポート (2008 年 3 月) より。
表 6.2
数値例。JAXA における集中検討レポート (2008 年 3 月) より。
アルミ棒 正方形
アルミ角パイプ
CFRP 角パイプ
断面 一辺 5cm
正方形断面 一辺
正方形断面 一辺
5cm, t=2mm
5cm, t=2mm
密度ρ [kg/m3 ]
2700
2700
1700
ヤング率 E[Pa]
7.00E+10
7.00E+10
1.20E+11
2.50E-03
3.84E-04
3.84E-04
5.21E-07
1.48E-07
1.48E-07
5.8
3.1
1.2
2
断面積 S[m ]
4
断面2次モーメント I[m ]
先端たわみ [pm]
6.8 課題リスト
• 熱・構造
安定性
どのように熱安定を達成するかを引き続き検討する。
感度解析
熱変形による画像の変形の応答性を、KW バンド光学系で再解析する。
潮汐力など 特に、JASMINE では今までの衛星では問題にならないようなさまざ
まな変形が、誤差要因となりえる。こういった要因をすべてリストアップし、
対策が必要なものとそうでないものを分離する。また、十分な精度で推定する
ための数学モデルを構築し、推定手順を確立する。
構造安定
従来問題にならなかったような長時間でのゆっくりした構造変動が問題
となる可能性がある。10 時間で 100pm の要求は 1 年でも 100nm 程度の変形
であり、原器の変動に匹敵する量である。アウトガスや放射線による素材の変
質によって、この程度の変動が無いことを保証することは難しい。変動のモデ
ル化などを適切に行って、推定を行うことが必要かもしれない。
• 軌道・姿勢制御系
軌道
熱・構造設計・通信と関連した軌道トレードオフ
マヌーバ
速く、かつ安定な姿勢制御アルゴリズムの検討が必要である。
姿勢安定性 姿勢安定は、バス系である程度追い込みをかけ、その後チップチルト
鏡を用いて目標精度を達成する方式になる。このためのアルゴリズム検討およ
6.8 課題リスト
91
び安定達成時間の短縮化が課題である。
姿勢制御精度 姿勢制御精度は大フレーム構築時の張り合わせ精度に影響を与え
る。この応答感度はまだ評価しておらず、今後の課題である。
tip tilt 鏡の制御 tip tilt 鏡は、ひので衛星で実績があり、必要精度もほぼ達成し
ている。しかしながら、太陽の辺縁など明るいところでの制御であり、太陽に
比べて暗い通常の天体を用いて、十分高速に tip tilt 鏡を制御できるかどうか
は今後の検討課題である。ガイドに使える明るい星のリストを作成する必要が
ある。また、具体的な tip tilt 鏡の制御アルゴリズムを検討するには、望遠鏡
の力学モデルを構築する必要がある。
静定時間
静定時間に関しては以下のトレードオフ項目が発生する (1) 静定時間が
長い場合は連続撮像 (TDI) を行う。この場合、検出器軸と衛星機軸のアライ
ンメント要求が発生する。(2) 静定時間を短く抑える
• 望遠鏡
素材
熱安定性を達成するための素材の検討を引き続き行う。
制作
望遠鏡、特に F = 1 鏡の製作工程を検討する。
光学系
素子
光学系のトレードオフ。特に、軸外し光学系とのトレードオフを行う。
光学素子の位置安定性がどの程度確保可能か、位置不安定が像面にどういう
影響を与えるかを具体的に評価する必要がある。
• Centroid
補正
星像中心推定における色補正・等級補正の手法
アルゴリズム 現在、重心法以外の検討を行っていないが、PSF fitting 法とのト
レードオフを行う必要がある。
• 検出器
宇宙線・電子機器
JWST で検討が進んでいるので、その方法を調査する。
flat の変動 検出器、特に flatness 補正の方法、その他の誤差要因の検討を行う。
配列技術
VISTA 広視野カメラで実績があるので、その方法を調査する。VISTA
は 4 × 4 のモザイク配列であり、JASMINE の 6 × 6 のモザイク配列はその自
然な延長線上にある。
熱変動
推定
検出器の熱変動のモデル化を行い、対策が必要かどうかを早急に検討する。
上にあげた様々な効果を個別に推定する手順を、解析手法の中に組み込んで
ゆく必要がある。
• モニター装置
多自由度
感度
多自由度同時測定によって、光学系の変形を推定可能かどうかを調べる。
目標感度を達成する。
長時間
JASMINE の 10 時間程度の安定性を測定できるよう、誤差などを低減
する。
• 宇宙線対策
使用機器の選定
機器候補を選定し、早急に実験を行う。
• 解析手法
単一星比率 バルジにおける単一星比率を調査する。星が密なこの領域では多くの
星は複雑な動きをすると予想される。
92
第 6 章 技術的課題
バンド幅など バンド幅、E0 の適切な選択、使用バンドにおける星密度のモデル
計算を行う。
測光バンド 科学的観点およびデータ解析の観点の双方から、最適な測光ようの
フィルターを設計する必要がある。
必要な星の数 バルジの重力モデルを作るために必要な星の数を調べる
QSO サーベイ バルジ付近で、観測に適した QSO を同定するための観測を行う。
QSO が適切な場所にない、あるいは数が足りない場合は、60◦ 程度の幅のあ
る領域を観測して座標系を固定する方法や、他の推定方法など、今まで検討さ
れてきた方法を再度検討する必要がある。
ノイズ除去 背景の暗い星や diffuse 成分 (黄道光など) の影響を除去するために、
星像以外にどの領域のデータが必要か検討する。全画像を取得できると良い
が、このためには通信やオンボード処理 (圧縮) に制約を与えることになる。
通信の制約は軌道制約となり、熱環境とも密接に関連する。
黄道光・変光星
K バンドで、黄道光および変光星の変動幅がどのようになってい
るかを調べる必要がある。
測光観測を含めた最適化
現在の仕様は位置天文観測には最適化されているが、測
光観測に関する検討は今後の課題となっている。観測手法・解析手法につい
て、位置天文観測・測光観測双方を考慮した最適化を行う必要がある。
• その他
科学目標
科学的目標をどこまで緩和可能かを議論する。
星の分布の詳細
バルジより手前の太陽とバルジの間にある星、バルジより奥の星
も含めて、タイプごと、等級ごと、距離ごとに星の数分布を計算する必要が
ある。
手法
解析
特に大フレーム構築時のフレームの変動を推定する方法について、必要があ
れば解析手法の見直しを行う。
長さ推定
従来検討されてきた方法は以下のとおり。(1) 小フレーム構築時に
同じところを密に観測し、伸び縮みを推定する。この方法では大フレーム
構築時間は長くなる (2) 鏡のサイズを測定し、PSF 形状で他の伸び縮み
を分離して推定する。この方法では、たとえば支柱が伸び縮みしない構造
をとるオプションを併用する可能性がある (3) 鏡の一部に grating grid を
つけて干渉縞で形状の伸び縮みを推定するなどである。どういった方法が
適しているかを検討する。
distorsion Reference frame の構築手順が従来考えていたもので良いのか、あ
らためて検討する必要がある。「大フレーム」という同時 (星の運動に比
べて十分短時間な) 座標を構築したときの歪みで、大フレームを構築した
時に残る成分があると、大フレーム自身が歪みを持っていることになり、
この歪みが年周期で変動すると、年周視差に対して大きなバイアスとな
る。現在使用している distorsion モデルは r3 の単純なものだが、より現
実的な 20 項から 40 項を導入した distorsion モデルでの検討を行う必要
がある。現仕様のように同時座標 (位置 reference frame) を時間的に結合
して一気に座標系を構築する手順だけではなく、同じ季節の同時座標 (位
6.8 課題リスト
置 reference frame) を集めてまず「速度 reference frame」を作成し、異
なる季節でのデータを合わせることで「年周視差 reference frame」を構
築するという手順の検討を合わせて行う必要がある。
その他
長さスケールの推定方法など、これまでに検討されてきた項目を整理し、
現実的な方法であるか、またシステム要求の緩和に役立つかどうかを検討する。
検出器ノイズ 現在、読み出しノイズの制約から、衛星をとめてある程度露出し、
ステップ的に姿勢を変更し、露出するという繰返しを行っている。しかし、技
術の進歩により今後検出器読み出しの FET ノイズが著しく低減する可能性が
ある。1 ミリ秒以下の読み出しが可能になった場合は、1 ミリ秒程度の露出、
ごく短時間の読み出しの連続で、衛星姿勢を連続的にゆっくり動かすような観
測方法も考えられる。
相対論効果 早急に検討する必要がある。
93
95
第7章
マイルストーン
7.1 概要
国立天文台では、基礎的検討開発段階のプロジェクト室を A プロジェクト室、建設
段階のものを B プロジェクト室、運用段階のものを C プロジェクト室と呼んでいる。
JASMINE 検討室は、2004 年度より A プロジェクト室として独立なプロジェクト室とし
て発足した。今後検討が順調に進み、理学委員会ワーキンググループでミッション提案を
行うと、これがミッション定義審査 (MDR) となり、さらにプロジェクト準備審査 (経営
審査)、システム要求審査 (SRR)、システム定義審査 (SDR)、プロジェクト移行審査 (経
営審査) を経て JAXA のプロジェクトと認定されることになる。JAXA のプロジェクト
となった段階で、国立天文台では A プロジェクト室から B プロジェクト室への移行を申
請することとなる。この後、JAXA 内では基本設計審査 (PDR)、詳細設計審査 (CDR)、
開発完了審査、打ち上げ準備完了審査 (LRR) を経て打ち上げとなる。無事打ちあがると、
定常運用移行審査を経て定常運用に入り、国立天文台でも B プロジェクト室から C プロ
ジェクト室への移行を申請する。
一方 ISAS での状況だが、JASMINE は国立天文台での A プロジェクト室発足に先立
ち 2003 年 10 月に、従来の大型判 JASMINE で理学委員会のワーキンググループとして
認められている。ISAS では、川勝氏が JASMINE の担当として 2004 年 2 月よりご協力
いただいている。2008 年 3 月 12 日に、本報告書のバージョンで理学委員会ワーキンググ
ループの再定義をご承認いただいた。
さらにこれに先立って、2003 年 4 月より NASDA(当時) 技術研究本部との間で予備検
討が開始された。約 1 年半にわたる検討から、銀河面全体を観測する従来のデザインで
は ISAS 衛星の枠をはるかに越える大型計画とならざるを得ないことが判明し、小型化
するためのミッション定義の検討を行ってきた。このため、2005 年春ころより要求分析
(13 章参照) を行ない、夏頃よりサイエンスの目標をバルジに絞ることによる小型化 (初
期は JASMINE-light と呼んでいた、本仕様書の JASMINE はこのバージョン) の検討を
行なってきた。2007 年度いっぱいかけて、これまで検討のご協力を行っていただいてい
た SE 推進室のほか、総合技術研究本部のサブシステムのメンバー約 10 名に加わってい
ただき、集中検討を行い、本仕様にたどり着いた。ISAS の用語では、ミッション提案ま
でが Pre PhaseA であるが、今後我々はこのバージョンを完成度の高いものとして Pre
PhaseA を進めてゆき、ミッション提案に結び付けたいと考えている。
なお、GAIA が 2011 年打ち上げを予定している事情がある。GAIA とは相補的なミッ
96
第7章
マイルストーン
ションであると考えているが、銀河系の全体像を解明するためには GAIA では観測が困
難なバルジ付近のデータを JASMINE が出すことが必要である。そのため、GAIA から
あまり遅れない時期に JASMINE の打ち上げ、運用、データ公開を行なうことが求めら
れる。GAIA との相補性を生かすためにも、運用期間が重複していることが望ましい。
我々は、JASMINE の技術実証として、超小型衛星 Nano-JASMINE を計画している。
概念検討は 2003 年 4 月に開始されたが、2008 年度から東大側人員を増強し、本格的な
開発の体制に移行している。これについては概要を 7.2 章にまとめたが、詳細は中須賀研
究室のホームページ http://www.space.t.u-tokyo.ac.jp/nanojasmine/index.htm
を参照。
なお、何名かの専門家の方の Nano-JASMINE と JASMINE の間に小型衛星 (宇宙科
学研究所の共通バスを用いた小型衛星の規模のものを想定) を入れるよう suggestion を受
けている。
表 7.1
JASMINE プロジェクトのマイルストーン
JASMINE
2010
2011
打ち上げ (予定)
ミッション提案
2012
2010 年代後半
Nano-JASMINE
カタログ公開
打ち上げ (目標)
運用 5 年
2020 年代
データ解析 2-3 年
カタログ公開
JASMINE プロジェクト全体のマイルストーンを、表 7.1 にまとめた。
7.2 Nano-JASMINE
図 7.1 Nano-JASMINE 概念図
7.2 Nano-JASMINE
97
図 7.2 Nano-JASMINE の軌道
図 7.3
Nano-JASMINE 望遠鏡の熱シミュレーションと Nano-JASMINE 望遠鏡 BBM
現在我々は、Nano-JASMINE の打ち上げを計画している。これは、JASMINE に先
立って日本でもスペースからの位置天文観測を経験するとともに、JASMINE に関する
いくつかの技術実証を行ってゆくことを目的とする。東京大学工学系研究科中須賀研究室
そ中心にいくつかの大学の工学系研究室がバス系を担当、国立天文台は京都大学や東海大
学などと共同でミッション系を担当する。図 7.1 は Nano-JASMINE の現在の概念図で
ある。
Nano-JASMINE はピギーバック衛星を目指すため、L2 点や観測に最適化された NanoJASMINE 特有の軌道を選択することは難しい。そこで、現在地球観測衛星などに良くつ
かわれる太陽同期軌道 (図 7.2 を最有力候補とし、この軌道で運用可能な衛星として設計
を進めている。Nano-JASMINE はビーム混合鏡を持つ HIPPARCOS タイプの衛星であ
るが、観測する二視野の方向は常に地球と反対側を向くようにする。このため、衛星スピ
ン周期は軌道周期と同期する必要がある。また、太陽との相対角がいつもほぼ一定となる
よう、衛星を歳差運動させる。(図 7.2)
現在、望遠鏡の BBM が完成している (図 7.3)。シミュレーションでは、ノミナルの太
陽同期軌道の外部熱入力変動を仮定して、ビーム混合鏡の相対角度は 1mas 以下に抑える
98
第7章
図 7.4
マイルストーン
撮像試験
図 7.5 星像切り出し回路
ことができることが示されている。これから熱真空試験を行って、シミュレーション結果
の検証を行い、その結果をフィードバックして EM 開発に移行する。
すでにこの望遠鏡を用いた撮像試験を行っている。汎用 CCD を接続して撮像試験を
行った結果、ほぼ設計通りの PSF を得ている。さらに、TDI 撮像の試験を行うための試
験装置を構築し、人工光源を用いた撮像試験を行っている。これは、メガトルクモーター
の上に望遠鏡と検出器一式を載せ、TDI に同期して望遠鏡一式をゆっくりと回転させな
がら撮像するものである。
Nano-JASMINE 検出器からはおよそ 2Mbps の連続データが吐き出されるが、小型衛
星でこのデータを転送することは現実的ではない。小型衛星の通信機 (現在開発中) のス
ペックとして現実的な値、100Kbps 程度を仮定し、可視時間 5% 程度とすれば、5Kbps
程度までデータ量を減らす必要がある。このため、Nano-JASMINE では検出器画像全体
ではなく、星の周りの 9 × 5pixel 分のイメージだけを落とすこととしている。星像切り出
しは地上での星の天文学ではよくおこなわれるものであるが、衛星搭載のコンピューター
は非常に低速であるため、そのアルゴリズムをそのまま衛星に搭載することはできない。
このための星像切り出し回路を新規開発している。z バンドでのサーベイ観測は初めての
7.2 Nano-JASMINE
図 7.6 Nano-JASMINE バス機器。上左はリアクションホイールと制御回路、上中は
光ジャイロ、上右はスタートラッカー、下左は搭載無線機、下右は搭載アンテナの外
観。ミッション期間中は、光ジャイロで衛星の角速度を、スタートラッカーで衛星の角
度を計測し、制御側に基づいてリアクションホイールを駆動することで衛星の姿勢制御
を行う予定である。このため、ミッション期間中に必要なセンサやアクチュエータを一
式そろえることができた。また、開発した搭載無線機の性能評価や地上局との適合性試
験を行った。
試みで、星の密度の評価もモデルに頼らざるを得ない。この評価が誤っていて星像付近だ
けのデータを切り出してもまだデータ量が多すぎる場合は、付録 B 章に記述した衛星搭
載コンピューターでバイナリーを可逆圧縮可能な手法を併用することも検討している。
星像の形状は、バス系が姿勢を推定するのにも使われる。星像切り出しおよびこれを用
いた姿勢制御アルゴリズムについては、シミュレーション上は検証済みである (付録 A.9
章参照)。ミッションデータをバス系に渡して制御に用いることは、新しい試みである。
このためにも、星像切り出しは重要である。2008 年中に電機系結合試験を行うよう、準
備を進めている。
Nano-JASMINE バス部開発は、東京大学工学系研究科中須賀研究室を中心に行ってい
る。今までに、衛星搭載コンポーネントの開発を行うとともに、コンポーネントの環境試
験に取りかかった。
まず、衛星の姿勢制御に必要なアクチュエータとして小型リアクションホイールおよび
その駆動回路を開発し、センサーとして光ジャイロおよびスタートラッカーを開発した。
また、これらのコンポーネントの性能を評価するとともに、得られた性能に基づいて姿勢
制御則全般の取りまとめを行った。これにより、姿勢制御の際に最も重要なコンポーネン
ト(センサ・アクチュエータ・コントローラ)をそろえることができた。つぎに、衛星に
搭載する通信系として、小型無線機と搭載アンテナを開発し、単体での性能を確認した。
また、環境試験用モデルにアンテナを搭載することで、衛星に搭載した際のアンテナパ
ターンの計測作業に取りかかった。さらに、BBM級データ処理系の開発と電源系サブシ
ステムのアーキテクチャ検討を開始した。
このように、各種コンポーネントを開発する一方で、開発したコンポーネントが宇宙空
間での使用に耐えられるかを評価するために環境試験を行った。特に今年度は搭載する電
99
100
第7章
マイルストーン
図 7.7 左は光ジャイロの耐放射線試験の様子、右は環境試験用ダミーコンポーネン
ト。ガンマ線をミッション期間の2年分照射することにより性能の劣化の様子を確認
した。この試験により問題点を洗い出し、対応策を検討した。衛星全体の振動特性の把
握や熱特性の把握を目的として現在設計を進めている。Nano-JASMINE は特に熱安
定性が要求されるため、この試験によって熱安定性の実証が行えると考えられる。
図 7.8 上右は灯台に整備された地上局、左は地上局系統図、下右は地上局アンテナイ
ンターフェース、左はアンテナ設計図を示す。Nano-JASMINE へのコマンドアップ
リンク、テレメトリの取得を目的とする東大地上局の整備を行った。また、前述の衛星
搭載用無線機との適合性試験を行った。
子部品と光ジャイロの耐放射線特性の評価を行うことで問題のある素子を洗い出し、対
応策を検討した。また、衛星全体の振動試験および熱試験を目的とした環境試験用モデル
(Structure Thermal Model, STM)の製作に取りかかった。
東大設置地上局用の無線機を開発し配備するとともに、衛星搭載無線機と簡易的な適合
性試験を実施した。また、東大設置用のパラボラアンテナの設計、地上局の整備を行っ
た。水沢VERA観測所については現状の開発状況を報告した。引き続き水沢局利用につ
いて調整を行う。
衛星全体の熱設計を固めるため、2008 年夏までに熱構造試験を行うべく準備を進めて
いる。実験自体は国立天文台 ATC の施設をお借りして行う予定であるが、ミッション系
7.2 Nano-JASMINE
101
外寸
508 × 508 × 504mm
重量
約 20kg
軌道
太陽同期軌道
打ち上げ予定
2010 年 7 月 (予定)
望遠鏡主鏡口径
5cm
焦点距離
1.67m
視野角
0.5◦ × 0.5◦
検出器
完全空乏裏面照射型 CCD
ピクセルサイズ
15µm
ピクセル数
1024 × 1024pixels
観測精度
13.5mas/撮 像 、1.8mas(達
成精度)@7.5 等
姿勢決定精度
0.05◦
姿勢安定度
720mas/8sec
ビーム混合鏡相対角安定度
1mas/2 時間
衛星に対するスピン軸 alignment 精度
0.05◦
表 7.2 Nano-JASMINE 仕様
STM(熱構造モデル) は国立天文台で、バス部およびミッション系取り付け部など衛星全
体の STM は中須賀研究室で製作を行っている。
周波数調整は、総務省への申請は完了し、現在クレーム処理が進行中である。打ち上げ
ロケットに関しては、相互協力に関する覚え書き (MOU) の取り交わしが最終段階に来て
おり、これが済めば本契約に向けての準備作業に入ることになる。
今後は、サブシステム単体開発の残作業項目を解決し、データ処理系の統合試験を行
う。また、姿勢制御系については閉ループ試験と性能確認、外乱評価を行う。また、熱・
構造試験で使う STM をもとに、振動試験、分離衝撃試験、質量特性試験、アンテナパ
ターン試験、迷光調査を行い、これらの試験データをもとに、EM 機を開発し、全体のイ
ンテグレーションおよび検証試験を行う。通信機一式の整備および必要機器の水沢局への
配備、試験もあわせて進めてゆく。
2009 年にはミッション系・バス系とも FM 開発に移行し、2009 年度中にシップメント
の準備をすべて完了することを目標としている。
表 7.2 に仕様をまとめた。
103
第8章
海外での評価
8.1 掲載文書
2007 年 10 月に上海で行われた IAU コロキウム 248 において、今後世界の位置天文分
野で推進すべき 4 つのプロジェクトのうちの一つとして、JASMINE が強い推薦を受け
た。会議集録に掲載される予定の文章 (ドラフト) を、8.2 章に掲載する。このドラフト
は、SOC の全員から賛同されたものである。
また、2008 年 3 月に、HIPPARCOS や GAIA の中心メンバーの一人であるイギリス
ケンブリッジ大学の Floor van Leeuwen 氏に、現在の JASMINE の仕様案についての
レビューを行っていただいた。このときにまとめていただいたレポートを、8.3 章に掲載
する。
8.2 Position Formulated by the Scientific Organising
Committee
++++++++++++++++++++++++++++++++++++
IAU Symposium No. 248, ‘A Giant Step: From Milli- to Micro-Arcsecond Astrometry’, was held in Shanghai between 15–19 October 2007. It represented a gathering
of 200 international scientists involved in all aspects of astrometry, ranging from involvement in completed and planned ground and space instrumentation in the optical,
infrared, and radio, as well as those involved in the modeling and astrophysical interpretation of advanced astrometric data, now and in the future.
Over the coming years, funding and support will be required for all aspects of this
fundamental and rapidly developing field, including maintenance and improvement
of the International Celestial Reference Frame in the optical and radio, continued
provision of state-of-the-art Solar System ephemerides, relativistic modeling, plate
scanning machines, advanced data processing and archiving tools, theoretical and
numerical modeling, provision of basic infrastructure, education, and other related
areas. Approved facilities, and those in an advanced stage of development, such as
Gaia, astrometric VLBI, VLTI (and other ground-based interferometers), and the
wide-field CCD surveys such as Pan-STARRS and LSST, will all play central roles in
these much-anticipated developments.
104
第 8 章 海外での評価
During the course of the symposium, the Scientific Organising Committee identified
and took note of four particularly substantial scientific areas, considered of great
importance for the continued development of the field. In each case, ‘non-overlapping’
plans exist across the international scene. However, current funding constraints might
inhibit their timely development, to the potential detriment of the field as a whole.
Not representing any particular priority order, these are:
(a) microarcsec-level infrared astrometry of the Galactic bulge, from
which large-scale distances and dynamics of the central region of the
Galaxy would become uniquely accessible; this scientific domain is exemplified by the Japanese-led JASMINE space mission concept;
(b) microarcsec-level optical astrometry focused on tens of thousands of selected
targets over the 10-20 mag range (exo-planets, individual objects in external galaxies, primary distance calibrators, etc); this scientific domain is exemplified by the
NASA/JPL-led SIM PlanetQuest space mission concept;
(c) microarcsec-level radio astrometry on hundreds of objects, crucial for the maintenance and extension of the International Celestial Reference Frame, and other projects
for the calibration of fundamental distance indicators in the Milky Way and for galaxies in the Hubble flow; this scientific domain is exemplified by the existing and highlysuccessful VLBA radio telescope;
(d) the densification of the ICRF in the visible, which must be continued and
extended to fainter magnitudes. This requires the complex, computationally-intensive
organisation and ICRF-based calibration of world-wide astrometric survey data into
appropriate end-user forms (e.g. as curated by the VO). Already but imperfectly
extending to 20 mag, demands for such calibrations to considerably fainter magnitudes
will be driven by wide-field surveys such as the VST, Pan-STARRS, LSST, URAT,
etc. Such work is currently undertaken by a small team at the US Naval Observatory,
yielding catalogues such as the USNO B2, UCAC, and NOMAD. The effort will
assume even greater importance and complexity in the future, as more and higher
accuracy surveys will become routine tools, demanded across all of astronomy.
Relevant funding and decision-making bodies are invited to take note of the central
importance of these programmes, as assessed by the international Scientific Organising
Committee during the course of the symposium.
Michael Perryman, Mark Reid, and Francois Mignard
on behalf of the Scientific Organising Committee
8.3 Comments of Jasmine report
Comments of Jasmine report as issued on 22 February 2008 by the Jasmine team,
and the subsequent discussions that took place at the Institute of Astronomy, Cambridge, UK, on 4 and 5 March 2008.
8.3 Comments of Jasmine report
8.3.1 Scientific program
The core of the science case for Jasmine is the study of the Galactic Bulge area and
as such this study will provide crucial information on the formation and history of
the Milky Way. The science case is, however, very strong for many reasons:
1. The study of the populations and kinematics of the galactic bulge are an essential element in the study of the structure and history of the Milky Way.
This kind of study can only de performed in the Infra-Red wavelength band.
In optical band interstellar extinction is too high to detect sufficient numbers
of stars bright enough to be observed in an astrometric survey.
2. The astrometric observations have a realistic and effective accuracy target for
the most crucial measurements, those of the stellar parallaxes. Such accuracies
are not obtainable from the ground even in visual wavelength due to atmospheric disturbances.
3. The survey can, with small enhancements such as adding a filter to some of
the detectors, provide a distinction for the measurements of an only recently
discovered and rather unexpected population the bulge region, namely very
young and massive stars. Those stars were not expected to be able to form
as near to the galactic centre as they have been observed, and a large scale
inventory of those stars and a description of their kinematics can shed some
light on their history.
4. The survey offers further possibilities to study both the area between the Sun
and the Bulge for a study of the population and kinematic of the disc population, and the are behind the bulge to see for the first time the extent of this
area on the far side of our galaxy.
5. The survey will allow for the detection of substantial numbers of lensing events,
with higher spatial resolution and much better epoch coverage than obtained
by dedicated ground-based surveys.
8.3.2 Hardware
The hardware for this mission is challenging. Building a long-focal-length telescope
in a relatively small satellite, and being able to keep the entire system temperature
controlled to a high degree, will not be simple, but as has been shown in the proposal,
realistic solutions are within reach. The detectors are expensive but available. The
pointing control needs still further study, and the same applies to the tip-tilt mirror
system proposed for eliminating residual motions from the focal image. Expert advisers in these areas have been identified. The pointing possibilities and characteristics
(residual noise after pointing, typical frequencies) need to be studied to assess the
means by which the image in the focal plane can be sufficiently stabilized within a
105
106
第 8 章 海外での評価
few seconds.
8.3.3 Orbit
There is a natural conflict for the orbit requirements between a relatively near-Earth
orbit for a very high telemetry flow, so that entire detector images can be down loaded,
and a high-altitude orbit that provides more protection from the Earth’s radiation at
IR wavelengths. There may be ways possible to reduce the telemetry requirements
and still download complete images.
8.3.4 The survey
The survey can still be further optimized to incorporate colour information from
detectors and to improve the spectral window function for variability analysis. Already in the current proposal the window function for variability analysis is very good
for a wide range of variability studies, and in particular for semi-regular long-period
type of variability that occurs among the luminosity class III stars that will be the
main target of the Bulge survey.
8.3.5 Data processing
Ways of reducing the astrometric data with minimal accuracy loss as caused by
calibrations have been identified. Although the methods proposed will be tedious
and laborious, they are sufficiently realistic to be confidently executed. The data
volume is not by any means excessive. Processing of entire detector images is identified as having the potential to provide a significantly better mission outcome. This
would be created through extending the dynamic (or magnitude) range of the mission, procedures to deal with image-blending, expected to be quite common at the
galactic centre, and generally to provide significantly better means for calibration of
instrument parameters.
Floor van Leeuwen
Cambridge 5 March 2008
107
第9章
組織と体制
ここに掲載した組織と体制は、19 年度までのものである。
全体像
国立天文台
JASMINE 検討室スタッフ:郷田(室長、教授)、小林(教授)、辻本(助教)、矢野(助教)
研究員、院生:丹羽(受託院生・京大)牛山(東海大)
、菅沼(研究員)
、山内(東大院生)
協力メンバー
京大:山田=>毎週、三鷹で活動(JASMINE、Nano-JASMINE の全般に渡って)
国立天文台:新井(重力波推進室)、上田(ALMA 推進室)=>レーザー干渉計型モニ
ター開発
国立天文台:河野、佐々木、花田、荒木、鶴田、浅利、田澤、野田==>星像中心決定
の共同実験、衛星開発の情報交換
ISAS/JAXA:川勝、松原=>衛星システムの検討、観測装置へのアドバイス
SE 推進室/JAXA:野田、對木、歌島、今村(俊)、今村(裕)=>衛星システムの検討
総技研本部:杉田、佐藤、宇都宮、安田、大谷、川井=>衛星システムの検討
東大工学部:中須賀、酒匂、初鳥 (2008 年度より国立天文台)、田中、片岸、小野、相
田、稲守 (20 年度より 10 名程度のメンバーが加わる予定) => Nano-JASMINE の衛星
システムの開発
名大:住=> JASMINE のための QSO サーベイ
元オリンパス:鹿島=> JASMINE の光学系の設計
サイエンス(力学構造構築方法の開発)
:秋田大:上田、東大:樽谷、お茶大:森川、名
大:小山、京大:山田
サイエンス(銀河系のダイナミックス):東大天文学教育研究センター:吉井グループ
国立天文台:中島、宮崎、高遠、宮内=>定例会参加、適時のアドバイスなど。
一ツ橋大学:中島
京大:阪上=>モニター開発、篠本=>データ解析
三重大:奥村=>データ圧縮
109
第 10 章
まとめ
1999 年ころより検討を続けてきた JASMINE だが、2003 年 10 月に理学委員会ワーキ
ンググループにお認めいただき、その後数年にわたり検討を重ねてきた。このなかで、宇
宙科学研究本部長、JAXA システムエンジニアリング推進室のご承諾を得て、2007 年度
は JAXA システムエンジニアリング推進室と総合技術研究本部のメンバーにご参加いた
だいて、「集中検討」として装置・サイエンス・システム全般にわたる検討を行ってきた。
本ドキュメントは、その検討のまとめである。
日本では X 線や赤外線などでの衛星観測がおこなわれてきたが、位置天文分野はこの
JASMINE で初めて本格的な衛星観測にチャレンジする。JAXA の方々との検討では、
多くの方々にご参加いただいて、衛星観測の経験がない我々ミッション側の研究者に対
し、日本での衛星事業をリードしてきた立場から、多くのアドバイスをいただくことが
できた。このような報告書を作成することができたのは、こういったご協力のおかげで
ある。
技術的検討の一方で、ミッション側の活動の中では世界からの JASMINE に対する高
い期待と支持を得ることができた。また、日本ではまだ位置天文コミュニティーは少ない
が、位置天文観測により得られるデータはすべての天文学の基本情報になるという認識が
徐々に浸透し、次第に天文学コミュニティー全体からの関心が高まりつつある。位置天文
に特化した研究会の開催、広報誌「アストロメトリーニュース」の発刊などの活動も行っ
てきた。
このように、世界および国内での期待が高まるなか、ますます JASMINE の成功は重要
性を増してきている。2007 年 10 月の上海での国際会議 (IAU シンポジウム No.248) で
は、「スペースで赤外線領域での位置天文観測を行うことは今後の位置天文観測の進むべ
き方向であり、JASMINE が世界に先立ってその技術的課題の解決の方向性を示すであろ
う」と総括されている。
一方、本検討書の中で示されているとおり、技術的な課題は多い。熱的構造的な安定性
の確保、姿勢制御についてチャレンジングな課題を残している。ただ、この集中検討の中
で、critical な技術的課題は、ほぼ前述した項目に整理されてきた。検討すべき内容が明
らかにされ、少しずつ具体的な計算が開始されている。そして、天文観測は、今後ますま
す高解像度かつ暗い天体の観測 (長時間露出による観測) の方向性を持つと考えられる。
すなわち、これらの技術的課題は現在進行中のスペースからの天文観測ミッションおよび
今後提案されるであろう新たな天文観測ミッションにも生きる、共通の技術的課題であ
る。これを解決することは JASMINE のみならず衛星による天文観測全般にとって重要
110
第 10 章
まとめ
な資産となり、開発する意義があると考えられる。
JASMINE ワーキンググループとしては、今後もこれらの技術的課題の解決に向けて、
JAXA、HIPPARCOS を成功させた経験をもち、また先行して GAIA や SIM をリード
してきた国外の研究者、企業などに幅広く協力を求めるとともに、天文学コミュニティー
からの幅広い支援を得るため、精力的に活動を続けて行きたいと考えている。そして、よ
り良いミッションとして行くため、サイエンス・ミッション目標も含めて今後も検討を深
めて行く所存である。
第 II 部
位置天文の歴史とサイエンス
113
第 11 章
位置天文学の発展
11.1 地上からスペースへ
初期の天文学は位置天文学であったと言っても過言ではないだろう。星の位置とその
時間変化は、やはり天文学の基礎情報であった。最初の体系的な恒星カタログを作った
のは、ヒッパルコス (Hipparchus:190-120BC) である。精度は、1500 秒角ほどであった。
19 世紀の終わりまでは、すべての天文観測は、天体の位置測定そのものであった。ところ
が、その後、量子物理学の勃興などにより、いわゆる天体物理学が、天文学の大きな地位
を占めるようになる。例えば、星のスペクトル情報などにより星の内部構造や進化の研究
が画期的に発展してきた。さらに、電波からガンマ線に至るまで広範囲の電磁波による天
文観測が発展してきた。ところで、天体の年周視差や固有運動は多くの天体物理学の分野
においても重要な基礎情報であったが、1970 年ぐらいまでは、位置天文は、天体物理のよ
うな大いなる発展を行えていなかった。他の情報の精度に比べ、位置天文情報は非常に不
確かなままであった。しかし、1970 年頃以降から位置天文学も新しい時代を迎えてきた。
光学、電波の新しい技術、検出器やコンピューターの発展によって、失われた時代を取り
戻すがごとく、位置天文も進歩を開始した。1990 年代中頃までは、地上観測で得られた
FK5 星表 (the Fifth Fundamental Catalogue:FK stands for Fundamental-Katalog) が
もっとも進んだカタログであった [Fricke, 1988]。過去 1 世紀以上にわたる子午環観測の
結果到達できたものであり、V 等級で 7.5 等より明るい 1535 個の星に対して、位置と固
有運動の平均精度は、±35 ミリ秒角 (mas), ±1mas/yr である。さらに、FK5 Extension
カタログでは、11 等より明るい 3117 個の星が収められている [Fricke, 1991]。だが、地
上の測定では、大気ゆらぎや装置の重力変形などに起因する観測精度の限界があり、ほ
ぼそれに達成してきた。そこで、ヨーロッパ宇宙機関 (ESA) ではヒッパルコス観測衛星
(HIPPARCOS:HIgh Precision PARallax COllecting Satellite) を計画し、いよいよス
ペースでの位置天文観測の時代に突入した。位置天文もいよいよ革命的なサイエンスと
なってきたのである。
ところで位置天文観測は、我々の宇宙における天体の幾何、運動学、力学を決め、様々
な天文学の重要な基礎情報を提供するとともに、もう一方は、基本座標系(天文座標系)を
構築する目的もある。地上では、前述した FK5 星表がその1つである。しかし、FK5 で
は、J2000.0 時点 (2000 年 1 月 1 日 12h 力学時) での春分点の方向が基準軸方向であるが、
春分点は地球の一般歳差により、背景空間の中を移動してしまうし、そもそもその基準点
の精度が数十ミリ秒角というもので、今後の高精度観測の時代には対応できない。とこ
114
第 11 章
位置天文学の発展
ろで一方、1970 年代より、VLBI による固有運動が無視できるほど遠方の銀河系外天体、
QSO を天球上の固定点として、電波源の高精度位置観測 (1mas より高精度) が行われる
ようになってきた。その結果、天球上の実質的な不動点と考えられる QSO や AGN を三
角点網とする電波座標系を構築して、天文学会共通の国際天文基準座標系 (International
Celestial Reference System=ICRS ) とすることが 1992 年の IAU 総会で決議され、そ
の後作業を経て、1997 年の IAU 総会で基準系が承認された。ちなみに ICRS の基準面と
基準点としての J2000.0 の瞬時の赤道面と春分点は、不動と見なされる系外天体の三角点
網に固定されており、天球上に凍結されることとなっている。さて、ヒッパルコス衛星で
は、QSO は暗すぎて観測できていないので、絶対的な座標系を張れていない。つまり、
ヒッパルコス星表はあくまでも、星々の天球上の相対的な位置である。天球の向きと回転
の 6 つの自由度が不定である。そこで、天球上の不動点で張られている ICRS とヒッパル
コス星表を結びつけることにより、絶対座標系を構築することができる。このようにして
できたヒッパルコス座標系は ICRS を可視光域で具体化した光学基準座標系となってい
る。しかし、こうやってできてきた座標系も星が固有運動で動くことにより、固有運動の
誤差が起因して曖昧なものとなっていく。そこで、引き続き高精度な観測を続け、基準系
のバージョンアップが必要である。*1
11.2 高精度アストロメトリの時代へ
前節で述べたように、1989 年にヨーロッパ宇宙機関(ESA)が打ち上げたヒッパルコ
ス衛星によって、アストロメトリ観測はいよいよスペースの時代に突入した (1992 年に
ミッションは終了。1997 年にその成果をカタログにしたヒッパルコスカタログがリリー
スされた)[ESA, 1997a]。位置測定に支障をもたらす地球大気の影響がないスペースに飛
び出したわけである。ヒッパルコス衛星以前は地上での年周視差の精度が最も良いカタロ
グでも、精度が約 35 mas であったのに対し、ヒッパルコス衛星では、1mas を達成した。
1桁以上の精度向上であった。このことにより、天文学での様々な分野で画期的な進展が
みられた(例えば、[ESA, 1997b] を参照)。ある意味で革命的であった。しかしながら、
ヒッパルコス衛星の観測の精度(位置精度、年周視差や1年当たりの固有運動は、約 1 ミ
リ秒角 (1mas)) は、まだ決して十分なものとはいえない。年周視差によって、距離が精度
良く(年周視差で約 10% 以内の精度が必要。これ以上だと、距離評価の際にバイアス効
果を受ける)決まるのは、1mas の精度だと我々から高々 100pc 以内なのである (15 章を
参照)。銀河系全体(我々から銀河中心まで約 8kpc ある)に比べれば、はるかに小さい領
域しか見渡せていない。ヒッパルコス衛星はアストロメトリ観測にとって、革命的であっ
たが、それは小さな革命でしかなかった。例えば、ヒッパルコス衛星だと我々から 100pc
以内しか精度良く距離を求めることができず、その範囲以内にはセファイド変光星など距
離指標としても興味ある天体はほとんど存在しない。そこで、100pc 以上の距離にある精
度が比較的悪いデータも用いて、統計的な解析を行い、変光星の明るさと周期関係のゼロ
点を求めている。その統計方法の違いなどにより、大マゼラン星雲までの距離に約 20%
の開きが出ている。遠くの銀河までの距離は、この大マゼラン星雲を基準として測定して
*1
この章では、文中の参考文献の他、[Walter and Sovers, 2000, Kovalevsky, 2002, 宮本昌典, 1997] を
参考にした。
11.2 高精度アストロメトリの時代へ
図 11.1 天の川を我々の銀河系にみたてた模擬図。太陽系の位置を仮に定めて、そこ
からの位置天文(アストロメトリ)の観測によって、太陽系からどこまでの範囲でどの
程度のことが分かるかを記してある。例えば、ヒッパルコス衛星によって得られた観
測データの場合、星の年周視差による距離測定が 10% の誤差以内で得られている領域
が太陽の周りの小さな円で示されている。また、今後の高精度アストロメトリ観測で、
もし 10 万分の一秒角 (10µas) の精度で星の年周視差や一年あたりの固有運動が測定で
きた場合、 距離測定が 10% 以内の誤差、横断速度が 1km/s 以内の誤差になる領域も
各々示してある(郷田、天文月報 2000 年 2 月号)。
いる場合も多く、その場合、遠くの銀河までの距離も 20% の誤差を含むことになる。す
ると、それを用いてハッブル定数といった宇宙論パラメータにも誤差が入る。また、変光
星の絶対等級に誤差が入ると球状星団の年齢にも数十億年といった誤差がはいり、宇宙の
年齢の下限値が定まらなかった。このようにヒッパルコス衛星の結果では、宇宙距離指標
の例でもまだまだ精度不足でさらなる精度アップを必要としている。
そこで、次は、銀河系全体のスケールを精度良く見渡す必要がある。そのためには、10
万分の 1 秒角 (10µas) 以上という高精度なアストロメトリ観測を要求する。この精度があ
れば、我々から 10kpc 以内の星を年周視差によって、10% 以内の誤差によって距離を評
価でき、また、20kpc 以内の星の横断速度を 1km/s 以内の誤差で決定できる (図 11.1 を
115
116
第 11 章
位置天文学の発展
参照)。この精度まで得られれば、銀河系のかなりのことは解明できるであろうし、さら
に系外銀河も target に入ってくる。これらが天文学、宇宙物理学の多くの分野に break
through をもたらすことは間違いない。つまり、今度こそ大革命の時代が訪れるのであ
る。そこで、JASMINE も 10 万分の 1 秒角の高精度な位置測定達成を目標とする。
11.3 スペースアストロメトリ計画と VERA 計画
ヒッパルコス衛星の成功を受けて、欧米でも高精度観測を睨んだ将来計画が始まってい
る。詳細は、次章で記述するが、ヨーロッパ宇宙機関 (ESA) は、ヒッパルコスの後継と
して GAIA 計画を進行させている。GAIA は V-band で 15 等級の星を約 10∼25 マイク
ロ秒角の高精度で測定する。約 10 億個の 20 等級までの星を測定する。2011 年の打ち上
げ予定である。アメリカは、NASA を中心として Origins 計画の一環として SIM 計画を
進行中である。SIM は他のアストロメトリ衛星とは違って、干渉計である。暗い星まで
超高精度 (4 マイクロ秒角)で測定可能となる。ただ、他の計画が、サーベイ型であり大
量の天体を観測するのに対しては、SIM は、選ばれた少数の天体 (約 1 万個)のみの観測
となる。また、SIM は初めてのスペース干渉計の実現としても期待されている。打ち上
げ予定は 2015 年であったが、NASA の予算問題でさらに延期される見込みである。ま
た、米国海軍天文台が計画している OBSS がある。OBSS 計画は、GAIA と同様な全天
サーベイミッションであり、V-band で 14 等級の星を約 10 マイクロ秒角の誤差で測定予
定である。さらに、次のような計画も有ったが、残念ながら予算上の問題もあり、凍結さ
れた。ドイツは 2006 年の打ち上げを目標とした DIVA 計画があった。精度は、ヒッパル
コスより約 5 倍の向上に過ぎないが、ヒッパルコスと次世代の高精度観測衛星(約 10 マ
イクロ秒角の高精度観測)との間をつなぐものとして期待されていたが、予算が獲得でき
ずに 2003 年 2 月にキャンセルとなった。アメリカも海軍天文台を中心として FAME 計
画を検討していた。これは、約 50 マイクロ秒角の精度達成を目標としたもので、ヒッパ
ルコスと次世代の間をつなぐものとして期待されていた。しかし、予算上の問題、および
CCD 製作上の問題から、2002 年 1 月に NASA がこの計画より撤退したことにより、開
発はキャンセルされた。
スペースアストロメトリ計画ではないが、地上の電波位置天文観測計画として日本で
は国立天文台を中心とした VERA 計画が稼働しており、現在 50 マイクロ秒角程度の精
度を達成し、年周視差ではかった星の距離の最高記録を出していることは注目に値する。
2008 年頃には 10 マイクロ秒角という超高精度を世界ではじめて達成することが期待され
ている。観測対象は、メーザー源であり、約 1000 個程度に限られはするが、銀河系中心
までの距離や、銀河回転速度など、銀河系の基本定数を高精度ではじめて決定できる可能
性がある。
11.4 近赤外線スペースアストロメトリ計画の必要性
高精度アストロメトリ観測の重要性が世界では認識されていることは、前節で述べた
ように欧米で 3 つのスペースアストロメトリ計画が進行中であることからも伺い知れる
(ESA の GAIA、NASA の SIM、USNO の OBSS)。また、日本でも国立天文台が中心
となって建設した、地上の電波位置天文観測望遠鏡である VERA が稼働をはじめ成果が
11.4 近赤外線スペースアストロメトリ計画の必要性
出し始めていることも説明した。ただ、欧米のスペースアストロメトリ計画はすべて可視
光領域の観測であるため、興味ある銀河中心や、バルジ、遠くの銀河面はダストによる減
光効果でほとんど観測することができない。そこで、ダストによる吸収の効果が少ない近
赤外線による観測が有効である。さらに、(メーザー源をみる)電波観測とは違って星自
体を大量に観測することができる。この観測によって、バルジ、銀河面(ディスク)の構
造を解明できることはもとより、ダストに覆い隠されている星形成領域での星のアスト
ロメトリ情報も得ることが可能となる。ここに JASMINE 計画の意義がある。日本では、
VERA 計画の次のステップとして、JASMINE 計画を位置づけられると思われる。
117
119
第 12 章
期待される科学的成果の詳細
12.1 バルジの形成・進化と力学構造
渦巻き銀河の中央部にあるふくらみがある構造はバルジと呼ばれている。基本的には古
い星で構成されているが、平均重元素量は太陽系付近とほぼ同様であり、さらに最近も星
形成が行われていることが分かってきた。しかし、星形成史や現在の星形成のメカニズム
はほとんど分かっていない。さらに、バルジの力学的構造もほとんど分かっていない。つ
まり、全体が棒状の 3 軸不等楕円体(バー構造)であることが示唆されてはいるが、全重
力物質がつくる密度分布や重力ポテンシャルの空間構造、星の軌道構造は全く分かっては
いない。また、中心部には 100pc スケールのバー構造(内部バー)も存在していると言
われているが詳細は分からない。さらに、バルジの形成や進化も未解決な問題である。例
えば、バルジ内の星の運動の特徴の一つとして、単位質量あたりの角運動量は、ハローの
星々と同様に小さい。このようにバルジの特徴は、ディスクともハローとも異なってい
る。では、このようなバルジの形成史はどうなるのだろうか? ディスクの不安定性で生
じたものなのか? ハローより以前に出来たのか、それとも後か? はたまた、銀河の合体
した後に生じたものなのか? 矮小銀河が降ってきて、ディスクと同時に出来たのか? そ
れともバーの力学的進化として、ディスクのあとに出来たのか? これらの問題は解明さ
れていない。さらに、ディスクとバルジの明るさの関係は、銀河の形態分類に密着してい
る。つまり、楕円銀河と渦巻き銀河との区分に関係している。従って、バルジ形成を明ら
かにすることは、銀河の形態の起源に解明につながる重要な課題である。この課題の解明
のためには、
、バルジの正確な形状(つまり、3 次元的な位置分布)やバルジ内の天体の運
動を知ることが必要であるが、これからはまさに JASMINE のような近赤外線による高
精度なアストロメトリ観測によって提供されるものである。
また、バルジの力学構造を知ることは、上述したような銀河系や銀河の進化を知るため
だけではなくてそれ自身が興味深いものである。つまり、自己重力多体系の(準)定常状
態の解明である。バルジにはバーがあり、しかも figure rotation の存在が示唆されてい
る。3 軸不等な形状で、なおかつ回転がある場合、力学構造としてはいかなる状態なので
あろうか? その重力ポテンシャルや個々の星々の軌道がどのようなものであり、どうし
て(準)定常状態、もしくはそれに近い状態を維持しているのか、または非定常的に進化
しているのか、非常に興味深い課題である (12.3 も参照)。
さらに最近では、銀河中心にある巨大ブラックホールの質量形成とバルジの質量とが比
例関係にあることが示唆され、バルジの形成・成長と巨大ブラックホールの成長が密着し
120
第 12 章 期待される科学的成果の詳細
ていることは間違いない。また、バルジの成長は、銀河円盤や銀河全体とも関わってお
り、そう言う意味では、銀河中心の活動は銀河進化全体と関わると言って良い。この点
は、12.2 章を参照されたい。
12.2 バルジと巨大ブラックホールの共進化
我々の住む太陽系を含む約 2000 億個の恒星からなる大集団、天の川銀河(銀河系)は
ごく普通の渦巻き銀河である。だが、主に赤外線の観測により、銀河系中心には巨大ブ
ラックホール(太陽質量の約 300 万倍)が存在する確かな証拠が見つかった。このよう
に、巨大ブラックホールは、活動銀河中心に限らず、大半の普通の銀河の中心に存在する
ことが明らかになってきた。さらに最近の X 線と電波の観測は、銀河系中心では過去に
大爆発を起こし、比較的最近(約 300 年前)でも小規模ながら爆発を起こしていたことま
でも明らかになってきた。巨大ブラックホールの質量はその母銀河のバルジ(中央部のふ
くらみをもった構造)の質量によく比例している。すなわち巨大ブラックホールの形成進
化と銀河バルジでの星形成の間に物理的関係が示唆されるのである。
ところで、銀河系中心の爆発の源は、巨大ブラックホールの周りのガスや星がブラック
ホールに落ち込む際に解放される重力エネルギーと考えられる。つまり、爆発を起こすた
めには、その燃料となるガスや星がブラックホールの周りに必要となる。では、そのよう
なガスはどこから与えられるのだろうか?また、星は銀河系中心付近のガスから形成され
たものなのか、それともバルジから落ちてきたものなのか、という疑問に答えることが長
期(100 億年程度前から現在まで)に渡る銀河系中心の爆発に対する解明には必要である。
実際、バルジはバー構造 (3軸不等楕円体) をしていると考えられており、そのため銀河
円盤部とバー構造との相互作用により、大量のガスを含む円盤部からバルジへガスを供給
しているという説がある(バーの力学構造により、ガスに衝撃波が生じ、角運動量やエネ
ルギーが減少し、円盤部からより内部にあるバルジへとガスが落ち込める)。さらに、銀
河系中心付近にもバー構造(内部バー)が存在し、バルジ内のガスが銀河系中心に流入し
ていると考えられている。この銀河系中心に流入されるガスが、巨大ブラックホールに落
ち込むとき解放する重力エネルギーが爆発のエネルギーと考えられている。従って、円盤
部からバルジへ、そしてバルジから銀河系中心部へのガスの降着率が銀河系中心の爆発活
動の長期的な様相を決める。ところが、降着率を決めるバー構造に関してはいくつかの観
測的証拠はあっても詳細はまだ不明である、そこで、バルジ内の星の位置と運動情報から
バルジ内のダークマターも含む全重力物質がつくる密度分布、重力ポテンシャルの空間構
造を明らかにし、バー構造の解明が必要である。このためにも JASMINE による位置天
文情報は必要不可欠となる。また、バルジへのガス流入に関しては、矮小銀河が合体して
きたことによるという説もある。矮小銀河が合体した痕跡があるかどうかは、星の位置、
運動情報をもとに明らかにできる。これも JASMINE の観測結果によって、是非を判明
できる可能性がある。
12.3 長距離力系の統計物理学
通常の気体や流体などのような短距離力系では、統計力学が確立され広く応用されてい
ることは周知の事実である。短距離力系では、衝突過程を通じて、強いカオスが効いてお
12.4 力学構造の構築
り、系のミキシングが効率的に起こっていく(混合性)[中野藤生・服部眞澄, 1994]。その
結果、緩和が起こり、系は熱平衡状態へと向かう。そして、緩和後は、マックスウェル・ボ
ルツマン分布が達成されている(いつみても、ほとんどその状態)
。しかし、長距離力系の
場合、粒子数が多くなればなるほど、短距離での衝突の効果よりも平均場の効果が大きく
なってくる。そのため、カオス性は弱まり、系はなかなか緩和しない。しかも、長距離力で
あるため、系全体がコヒーレントに集団運動を行う場合もあり、グローバルな状態が変遷
していく [郷田直輝, 2000]。また、十分長時間たって、系のエルゴード性が達成された後、
確かに長時間平均すれば、マックスウェル・ボルツマン分布なのだが、“いつみても” その
分布をしているわけではない。短距離力系の場合は、系をお互いが独立と見なせる部分系
(その中の粒子数は十分多い)に分けることができる。したがって、観測すると、その部分
系のアンサンブル平均を見ることになる [丹羽敏雄, 1981]。緩和後は、エルゴードが成立
しているので、アンサンブル平均は長時間平均に等しい。従って、緩和後、観測すると、
長時間平均状態、つまり熱平衡分布を常に観測できることになる。ところが、長距離力系
の場合、そうはいかない。長距離力という性質のため、お互いが独立とみなせる部分系に
分けることができない。従って、観測は、部分系のアンサンブル平均をみることにはなら
ない。よって、緩和後は確かに長時間平均すれば、熱平衡分布をしているが、短時間の観
測では熱平衡状態は見られないのである。実際、1 次元重力多体系(シート系)で準平衡
状態を遷移続ける [Tsuchiya et al., 1994, Tsuchiya et al., 1996, Tsuchiya et al., 1997]。
エルゴードが成立した後でもある。しかし、全くでたらめではなく、その遷移の仕方にあ
る種の普遍的な規則性がみられる。実際は、力学系はハミルトニアンが与えれれば、原理
的にはその系の力学的振る舞いはすべて決まっているはずである。完全にでたらめで、早
く緩和すれば、ミクロな運動は実際的に予測不可能でもマクロな状態は、その後は熱平衡
分布を使い、評価は可能である。しかし、前述したように重力系は熱平衡状態がいつも実
現はしていないが、全体が集団的運動を行い続け、そこに規則性がある。その規則性は、
ハミルトニアンから実は決まっている、その関係を見つけることが興味深い。そのヒント
は、位相空間 (全エネルギー一定の Γ 空間)のトポロジーにある。その位相空間上に現れ
る、トーラス領域とカオス領域の比率とそのサイズ分布などが規則性を見つける鍵だと考
えられる。このように、自己重力系のような長距離力系での集団運動の規則性をいちいち
数値実験するのではなく、何か原理的な法則性から導き出すことができるのかどうか、そ
の新しい統計物理学とも言うべきものの構築が重要であると考える [郷田直輝, 2000]。そ
の際、カオスなどの物理的概念の発展や N 体計算等による数値実験は確かに重要かつ必
要である。しかし、現実の系で実際どのように成っているのかを知ることは理論のさらな
る進展にとって重要である。自然科学の分野では、観測結果や実験結果があってこそ画期
的な進歩が見られる。そういう意味では、我々はまだ実際の自己重力多体系がどのような
(準)定常状態にあるのかも知らない状況である。先ずは、JASMINE 等のアストロメト
リ情報をもとに、銀河系の力学構造を構築し、そこを見定めることが今後の進展の礎にな
ると期待される。
12.4 力学構造の構築
銀河系の力学構造を知ることは、何度か前述したように、バルジの構造そのものを理解
するとともに、それらの形成史をも明らかにし、銀河系形成史、ひいては銀河全般の形成
121
122
第 12 章 期待される科学的成果の詳細
史解明に結びつくものである。また、力学構造を知ることは、自己重力多体系の緩和過程
や定常状態の物理的解明というアカデミックな研究にとっても重要である。では、力学構
造とはなんだろうか。その構成要素の星々の密度分布、速度分布、全重力物質による重力
ポテンシャルなどがあげられるが、一番基本的なものは、その構造の重力を形成してい
る構成要素(重力物質)の位相分布関数である。位相分布関数が出せれば、それを用いて
(ポアッソン方程式を通じて)重力ポテンシャルや速度分布、密度分布などが導出できる。
さて、この位相分布関数をアストロメトリから得られる情報(天球上の星の位置、つま
り2次元的位置、天体までの距離(年周視差による)
、固有運動(視線に垂直方向の速度)
)
の5次元情報、および視線速度を加えた6次元情報(つまり、3次元的な位置と3次元
速度ベクトル)から構成物質(重力を担うすべての物質、つまり重力物質)の分布関数を
導出しなくてはいけない。ただ、アストロメトリや視線速度観測により、“星” の6次元
位相分布関数が分かるからといって、これがそのまま力学構造を知ること、つまり “重力
物質” の重力ポテンシャルや位相分布関数を知ることにはならないことを注意すべきであ
る。先ず、星の位置と速度の情報だけでは、その星の場所の重力ポテンシャルが分からな
いことは容易に分かるであろう。もし、星の加速度が分かれば、その地点での重力ポテン
シャルは容易に分かる。しかし、速度だけでは分からない。さらにもう一つ課題がある。
それは、観測されるのは、重力物質のうちのごく一部だということである。つまり、観測
される星以外にも観測限界より暗い星、さらには星以外のダークマターが存在すると思わ
れる。力学構造の構築とは、こういったすべての重力物質の位相分布関数やそれらが作る
重力ポテンシャルを知ることにある。つまり、観測されている一部の星のデータから見え
ていないすべての物質がつくる位相分布関数や重力ポテンシャルを構築する必要がある。
では、どのように構築するのか、その方法について以下で記述する。
(1) モデルとの比較
上述したように、観測される一部の有限の星のデータから、すべての重力物質による重
力ポテンシャルや位相分布関数を求めるにはどのようにしたら良いのだろうか。そのため
には、先ず理論的なモデルによる力学構造のテンプレートを用意する。そのモデルでは、
重力ポテンシャルの形状が仮定され、それをもとに位相分布関数は理論的に評価されてい
る。このようなテンプレートを考え得るだけ多く用意しておく。そして、そのテンプレー
ト、つまり理論的に評価された位相分布関数(確率分布関数)と観測値とを比較すること
によって(相関をとる)、どのテンプレートが一番観測データをうまく説明できるかを統
計的解析によって見つける。そうやって、得られたテンプレートが、観測事実をもっとも
よく説明できる力学構造となる。このような手法により力学構造の構築を行う必要があ
る。では、どのようにテンプレートを作るのだろうか。以下で詳しく述べていく。
(2) 定常状態モデルについて
力学構造のモデル作りにおいて、基本的な仮定として構造は定常状態だと考える。この
仮定は、近似的に正しいと思われる。銀河系は、その力学的時間尺度は宇宙年齢に比べて
極めて短い。従って、今の時期が、非常に特別な時期であるとは考えにくいからである。
しかしながら、定常と矛盾するような観測事実が見つかってくる可能性もある。1つは、
バー構造である。バーを通じての角運動量のやりとりなど非定常になっているかもしれな
い。しかし、銀河系のバーは他の銀河とも共通しているので、その進化はかなり遅く、定
常からのずれは小さいと推測される。また、そのずれは観測にかかると期待される。さら
に、銀河系の渦巻き構造は、角運動量の再配分やヒートアップを行っている可能性もあ
12.4 力学構造の構築
123
る。また、近づく、もしくは衝突してきた矮小銀河から潮汐力で物質をはぎ取って、その
残骸があり、非定常である可能性も強い。以上のように、現実的には銀河系は非定常であ
るかもしれないが、そのずれは小さいと仮定できること、またそうだとすれば定常状態か
らの摂動で構築できる。従って、先ずは、定常状態を仮定し、そのモデルの構築を考える
のが最善であると考える。さらに、定常状態を考えるメリットはもう1つある。それは、
一般に、位相分布関数は、3次元的位置、3次元運動量、時間の7つの関数であるが、定
常状態の場合は、最大でも3つの関数で済む。つまり、定常状態の場合、ほとんど規則軌
道で銀河は形成されていると考えられるので(粒子数が無限大の極限、つまり、無衝突系
では、平均場の影響が、カオス運動の起因となる短距離での衝突過程より強いため、集団
的な規則運動をすると考えられる)
、その位相分布関数は “強いジーンズ定理” により、位
相分布関数か、孤立積分量で書かれている [Binney and Tremaine, 1987]。3自由度の系
であるので、孤立積分量の数は、最大で3つである。このように、定常状態を考えると変
数の数が少なくて済む大きなメリットがある。たとえて言うならば、3次元的な人間の体
(銀河系という6次元系)が、実は DNA という1次元情報(3つの積分量でかける関数)
で形作られているようなものである。
(3) トーラス構築法
では、実際にどうやって、定常的な重力ポテンシャル中の位相分布関数を構築して
いけばいのだろうか。先ず、前述したように定常ポテンシャル中の位相分布関数は、一
般的に3つの孤立積分量の関数となっている。つまり、まずやるべきことは、定常ポ
テンシャル中でのこの積分量を見つけることである。その方法の1つとして、トーラ
ス構築法と呼ばれる方法がある [McGill and Binney, 1990, Binney and Kumar, 1993,
Kaasalainen and Binney, 1994]。それを以下で紹介する。
先ず、なにかある積分可能なハミルトニアン H0 (J) を考える。J は、この系の積分量
(作用変数)である。また、作用ー角変数 (J, θ) が (q, p) の関数として解析的に解けるも
のとする。それに対して、与えられた定常ポテンシャルに対応するハミルトニアンを H
とする。このハミルトニアンが、新しい作用変数 J′ のみでかけていれば、この J′ が孤立
積分である。このような J′ を見つけることがトーラス構築法である。この方法では、H0
の作用ー角変数 (J, θ) から、H の作用ー角変数 (J′ , θ ’) への変換の母関数 Sn を求める。
母関数とは次の変換式を満たすものである。
S(θ, J′ ) = θ · J′ − i
∑
Sn (J′ )ein·θ
(12.1)
n̸=0
ここで、n は正数の組である。
この母関数によって、作用ー角変数は次のように変換される。
J = ∇θ S(θ, J′ ) = J′ +
∑
nSn (J′ )
(12.2)
n̸=0
θ′ = ∇J′ S(θ, J′ )
(12.3)
次にこの変換の母関数をどうやって求めるかであるが、H が J′ だけにしか依存しないと
いう条件を課すことで以下のように逐次的に求めていく。
(i) 各 (θ, J′ ) について、trial の Sn を用いて 12.2 式を使って、対応する J を求める。
(ii)q(θ, J), p(θ, J) から H(q, p) を求める。
124
第 12 章 期待される科学的成果の詳細
(iii) 同一の J′ に対して、θ を変えていき、Np 点をサンプルとして選ぶ。そのサンプルに
対して、
χ2 [Sn (J′ )] =
1 ∑
(H − H̄)2 ,
Np
を最小にするように Sn (J′ ) を各 J′ 毎に決める。ここで、H̄ ≡
′
(12.4)
1
Np
∑
θ
H である。こう
′
やって、Sn (J ) が求まったので、各 (θ, J ) から、(θ, J) が求まり、それを経て、(q, p) に
変換することが可能である。
(iv) 実際の解析方法
次にやるべきことは、この J′ の関数となる位相分布関数を仮定することである。実際
は、バルジやディスクなど要素構造によって異なるので、それを α という index で表し、
その位相分布関数を fα (J′ ) とする。この関数形を仮定する。すると、この関数は、(iii) で
(q, p) を計算できるので、任意の位相空間 (q, p) に存在する確率分布関数を与えるもの
である。さらにこれらの分布関数を用いれば、様々な観測量が計算可能である。従って、
この確率分布関数と観測データとの相関をとり、最も確からしいものを選ぶ。さらに、異
なった重力ポテンシャルでも同様の手続きを踏み、観測データをもっとも説明できる重力
ポテンシャルと位相分布関数の組み合わせを求める。
以上が力学構造構築方法の骨組みである。しかし、ここで2点ばかり注意しておくこと
がある。先ず第一点は、位相分布関数から求めた密度分布が、ポアッソン方程式を通じ
て、最初に与えた重力ポテンシャルと無矛盾になっていなくてはいけない。この条件を満
たすものだけを選ぶ必要がある。
もう一点は、実際の観測データは、明るさや色で選択された特定の星々だけであるとい
うことである。今までは、純粋に力学的な観点しか考えていなかったが観測の選択効果に
よって、力学的にある偏ったデータのみ抽出されている可能性もある。この選択効果を考
慮した、確率分布関数を考えなくてはいけない。そのためには、星の初期質量関数や星の
形成史を仮定し、モデル化が必要である。そのモデルを使って、現在の星の色や明るさを
評価しておく必要がある。この情報をもとに、ある星のタイプ(色、明るさ)を観測する
選択確率を計算し、力学的に求めた位相分布関数と組み合わせたものが、本当の観測に対
する確率分布関数を与える。調べるモデルやパラメータの数が増えることになり、解析は
難しくなるが、大量の観測データとの比較によって、これらの量が求まった場合は、現在
の力学構造のみならず、星の初期質量関数や星形成史という銀河系の形成史に関わること
まで求めることができるという利点がある。
あと、現実は最初に述べたように、非定常である可能性がある。その場合は、観測デー
タには定常モデルとの比較だけでは消せない残差が残るはずである。その際は、定常モデ
ルから摂動的に非定常状態へ拡張していく工夫が必要となろう。
(5) トーラス構築法以外の他の方法:シュバルツシルトの方法
説明したトーラス構築法以外にも観測データと比べるテンプレートを作る別の方法があ
る。その一つが、シュバルツシルトの方法である [Schwarzschild, 1979]。この方法は次の
通りである。先ず、重力ポテンシャルを与える(ポアッソン方程式を通じて、密度分布を
計算する)。その定常ポテンシャルのもとで、初期条件を変えて、たくさんのテスト粒子
に対して軌道を計算する。ある粒子が、ある場所に滞在する存在確率を求めると、密度分
布はそれに比例する。各々の軌道に対応するこの存在確率をある重みで足しあげて、最初
に仮定した密度分布を再現できるようにする。この方法が、シュバルツシルトの方法であ
12.5 高精度距離決定による高精度化学組成決定
る。実は、この重みが分布関数に対応している。与えられた重力ポテンシャル中で、どう
ような軌道で構造が形成されているか、無矛盾に軌道を構築できる。
この方法は、トーラス構築法に比べて、計算は容易である。しかし、軌道など多くの量
を記憶しておく必要があり、トーラス構築法に比べて記憶容量が圧倒的に多くなる。ま
た、位相空間の分解能も軌道の数で決まるという制限があり、位相空間をくまなく一様に
覆うことは困難である。従って、任意の位相空間点での確率分布関数は求めることはでき
ず、観測データとの比較が直接的にはできないデメリットがある。ただし、今後、この方
法についても吟味し、トーラス構築法との比較検討や、場合によっては両者の併用を考慮
する必要はあると思われる。
(6) 今後の戦略
JASMINE をはじめ、VERA, GAIA といった高精度アストロメトリ観測が予定され、
精度良い情報が大量に出てくることになる。データが出てくる前に、ここで説明した方法
であらかじめ多数の理論のテンプレートを用意しておく必要がある。なるべく早急に検討
して、手法の完成が肝要である。実際にこの手法がうまくいくのか、答えを知っている
銀河系の模擬カタログにこの方法を適用して、どれぐらい正しい答えを引き出すことが
出来るのか、試験を行っておく必要もあるだろう。国内でも Japan Torus Construction
Project チームを作って検討を行っている。
12.5 高精度距離決定による高精度化学組成決定
星の化学組成はいうまでもなく銀河系の形成、進化を探る強力なツールである。さら
に、この化学組成情報に星の速度情報を組み合わすことができれば、化学組成と速度間
に成り立つ相関が明らかになり、さらなる強力なツールになりうる。また、金属量欠乏
星の化学組成パターンは個々の超新星における元素合成の情報を保持していることから
(e.g., [Shigeyama and Tsujimoto, 1998])、元素合成の理論と観測された組成パターンか
ら、様々な元素の起源を明らかにすることができる。そしてさらにその結果が、化学組
成から銀河の進化を探る研究へとフィードバックされていく。例えば、太陽近傍で観測
されている星の [Mg/Fe]-[Fe/H] 図 を見てみると (図 12.1)、基本的に [Mg/Fe] の値は
[Fe/H] が少ないハロー星ではほぼ +0.4 の値を取り、ある値を境にして [Fe/H] の増加
とともに [Mg/Fe] の値は減少していく傾向が見られる。その減少をし始める [Fe/H] が
実は thin disk 星と thick disk 星で異なることが明らかになってきた。thin disk 星では
[Fe/H]> −1 で [Mg/Fe] が減少をし始めるが、thick disk 星は [Fe/H]=–0.4 辺りまで減
少を始めることはないのである。これは thin disk と thick disk の形成のタイムスケール
の違いを反映していると解釈できる。[Mg/Fe] が減少するのは、Ia 型超新星から大量の鉄
が放出されることによるものだが、この Ia 型超新星の親星の寿命が 10 億年ほどと II 型
超新星に比べてかなり長いことから、[Mg/Fe] の値が宇宙時計として機能する。図 12.1
が示す [Mg/Fe] 値の振る舞いは、thin disk が数 10 億年のタイムスケールで形成された
のに対し、thick disk はわずか数億年という短い時間で形成されたことを示唆する。
ところが、星の化学組成の決定にはいまだ大きな不定性を伴う。ここで、最近脚光を
浴びている 2 つの星を例に挙げて、化学組成決定の現状を考察してみる。これらの星
(CS22949-037, CS29498-043) は、マグネシウムやシリコンといった軽い元素の量が鉄に
比べて異常に高い星であり、これまでの星では決して見られなかった化学組成パターンを
125
126
第 12 章 期待される科学的成果の詳細
持っている ([Depagne et al., 2002, Aoki et al., 2002, Israelian et al., 2003])。星の化学
組成を導出する際の基本的なパラメータは 3 つある。effective temperature (Teff ) 、表面
重力 (log g)、metallicity ([Fe/H]) である。これら 3 つのパラメータが 3 者によって求め
られた結果を表 12.1 に示した。
図 12.1 ハロー、thick disk、thin disk に属する星々の [Fe/H]([Mg/H]) に対する
[Mg/Fe]([Mg/Fe]) 値の進化 ([Fuhrmann, 1998] Astronomy and Astrophysics 338
161–183(1998) より, p.171 Fig.11 の引用)。
star
CS22949-037
CS29498-043
Teff
4900
4900
4300
4400
log g
2.5
1.5
1.5
0.6
[Fe/H]
–3.54
–3.9
–3.44
–3.75
author
Israelian (2003)
Depagne (2002)
Israelian (2003)
Aoki (2002)
表 12.1 星の大気モデルの fundamental parameters
Teff 、[Fe/H] の値はそれほど結果に違いは見られないが、表面重力においてはおよそ一
桁もの違いがでている。この表面重力の評価の大きな違いを反映して、導出された化学組
成比は表 3.2.2 に示されているように大きく異なる結果になっている。表面重力は一般に
鉄の ionization equilibrium の情報から計算される。その場合、non-LTE 効果をどのよ
うに取り入れるかによって大きな違いが生じてしまう。ところが、星までの距離が正確
に測られていれば表面重力を絶対等級(および Teff )から直接導出することができ、表面
重力の評価の不定性は著しく減少する。実際、現在正確に表面重力が測られている星は
12.6 星の初期質量関数
127
CS22949-037
CS29498-043
[O/Fe]
3.26
1.98
[O/Fe]
3.26
1.98
[Ca/Fe]
-0.01
0.35
[Ca/Fe]
-0.01
0.35
[Na/Fe]
0.69
2.09
[Na/Fe]
0.69
2.09
Israelian
Depagne
Israelian
Aoki (2002)
(2003)
(2002)
(2003)
表 12.2 2 つの星における化学組成比
Hipparcos によって精度良く距離の測られた太陽から数 10pc 内にある星に限られる。
このように星の化学組成を正確に評価するためには、星の距離を高精度に求めることが
要求される。JASMINE によって銀河面上の 10kpc 内の星について、高精度距離決定が実
現した場合の化学組成分野に与えるインパクトは計り知れないほどのものがあると言えよ
う。またさらに、星の高精度距離決定は星の正体を、つまり星の evolutionary stage を押
さえる意味でも極めて重要である。[Christlieb et al., 2002] によって、[Fe/H]=–5.3 とい
う超金属量欠乏星の存在が明らかになった。その星の大きな特徴は炭素や窒素が極端に多
いということである。特に、炭素は鉄に対して太陽比の約 1 万倍もの値を示している。実
はこの炭素や窒素の起源がこの超金属量欠乏星がどのようにして生まれた星かを解く鍵を
担っているのである。これらの元素は星の進化過程の中で作られていったものなのか、あ
るいはもともとそれらの元素を豊富に含むガスからこの星が生まれたのか? 前者の場合、
この超金属量欠乏星は種族 III 星であることを強く示唆する ([Shigeyama et al., 2003])。
その答えを得るためには、この星がどのような進化段階にあるのかを突き詰めることが不
可欠である。そしてそのために、この星までのおよそ 10kpc という距離を正確に測り、そ
れより星の絶対等級、表面重力を高精度に評価することが求められる。
12.6 星の初期質量関数
銀河は,多数の星を主要天体として含む。そして,銀河の観測的性質は構成要素として
どういう質量の星がどれだけあるかに強く依存ずる。そればかりか,星は紫外線や可視光
赤外線などの電磁波の放射源であるばかりでなく,進化の最終段階における超新星爆発や
質量放出などにより,銀河内のガスの進化に対して強く影響するが,その効果は星の質
量によって大きく異なる。そのため,星の初期質量関数は,星形成率と並んで,銀河の形
成・進化を研究する上で非常に重要なのである。
ところが,星の初期質量関数の研究はかなり不充分であると言わざるを得ない。観測的
には,我々の銀河系の中での平均的な初期質量関数はある程度わかってきているが,星形
成領域や環境効果による違いがあるかどうかについては依然として確たる答えは得られて
いない。また,理論的に初期質量関数を説明する試みは過去数十年間にわたって行われて
きたにもかかわらず,いまだに説得力をもつ理論モデルは得られていない。そのため,銀
河形成過程や初期進化を研究する場合や爆発的星形成が起きている他の銀河を研究する場
合など,現在の我々の銀河系と大きく異なる環境下での星形成を知る必要がある場合に,
どういう初期質量関数を用いるべきかはっきりしない。また,確固とした理論モデルの構
築のためにも,星形成領域での違いの有無は重要な情報である。
128
第 12 章 期待される科学的成果の詳細
ここでは,JASMINE による観測によって,星の初期質量関数の研究においてブレイク
スルーになる重要な情報が得られる可能性について議論する。
12.6.1 星の初期質量関数の観測の現状
星の初期質量関数を次のように,質量範囲でいくつかに区切ってパワーローで近似して
表現する。[Kroupa, 2001]
ξ(m) ∝ m−αi = mγi .
(12.5)
ここで,m は形成時の星の質量であり,ξ(m) は質量範囲 m から m + dm に形成された
星の数を表す。α についての観測結果をまとめたのが,図 12.2 である。[Kroupa, 2001]
図 12.2 さまざまな星形成領域における観測された α の分布。横軸は各観測領域
での星の平均質量を表す。黒丸および黒三角はそれぞれ我々の銀河系と大マゼラン
星雲の星形成領域に関する観測を Scalo(1998)[Scalo, 1998] がまとめたもの。白三
角は Muench, Lada & Lada (2000)[Muench et al., 2000] によるトラペジウム星団
の観測。図は [Kroupa, 2001], Monthly Notice of roial Astronomical Sciety, 323,
p.231–246(2001), p.233, Fig.1 の引用。
これらの観測の平均をとると以下のようにまとめることができる。
α0 = +0.3 ± 0.7 (0.01 ≤ m/M⊙ < 0.08)
(12.6)
α1 = +1.3 ± 0.5 (0.08 ≤ m/M⊙ < 0.50)
α2 = +2.3 ± 0.3 (0.50 ≤ m/M⊙ < 1.00)
(12.7)
(12.8)
α3 = +2.3 ± 0.7 (1.00 ≤ m/M⊙ ).
(12.9)
12.6 星の初期質量関数
図 12.2 を見ると,星形成領域による alpha の変化が大きく,環境効果があきらかにあ
るように感じる。しかし,それぞれの星形成領域で観測されている星の数は通常数百個以
下であることに注意する必要がある。この数は十分ではなく,統計的な揺らぎの効果が無
視できない。統計誤差の影響は図 12.3 と図 12.4 から見ることができる。
図 12.3
星の数が減少したときの初期質量関数の揺らぎ。初期質量関数としては,
(12.6)-(12.9) 式を仮定した。実線は星の個数が 106 個の場合。点線は星の個数が 103
個の場合についての2回別々の試行の結果。図は [Kroupa, 2001], Monthly Notice of
roial Astronomical Sciety, 323, p.231–246(2001), p.235, Fig.2 の引用。
図 12.3 は,初期質量関数として (12.6)-(12.9) 式を仮定した場合の統計的揺らぎの効果
を入れた数分布である。実線は星の個数が 106 個の場合であり,点線は星の個数が 103 個
の場合についての2回別々の試行の結果である。103 個の場合には,ある程度の揺らぎが
見えるが,全体的な印象はそれほど大きく違うわけではない。しかし,α に直すために
は,微分することになり,値は大きく異なる。質量範囲を図 12.3 の b1 から b6 に区切っ
て,星の個数を 102 個から 106 個の間で変化させながら,初期質量の分布をつくり α を
計算したのが図 12.4 である。
星の個数が 103 個以下になると,α が大きく揺らぐことがわかる。統計的な α の揺ら
ぎは観測点のばらつきと同程度の大きさであり,星形成領域によって α が異なるかどうか
は,はっきりしない。
また,観測を解析する場合には,個々の星が星団に属するかどうかの判定や,星形成
領域においては,前主系列段階での進化モデルの不定性など,他の問題も多く存在する。
[Hillenbrand, 2000] また,フィールドで観測する場合には L-K バイアスの問題が深刻に
なる。
129
130
第 12 章 期待される科学的成果の詳細
図 12.4 星の数が減少したときの α の揺らぎ。白い小さな丸印は図 12.2 の観測点。
図は [Kroupa, 2001], Monthly Notice of roial Astronomical Sciety, 323, p.231–
246(2001), p.235, Fig.3 の引用。
12.6.2 JASMINE による星の初期質量関数の観測
JASMINE によって,我々の銀河系のバルジの星の質量関数は厳密に求められる。個々
の星の距離がはっきり測定されるために,星団の場合の帰属問題や,フィールド星におけ
る L-K バイアスの問題がなくなる。また,サーベイされる星の個数が非常に大きいため
に,前述したような統計誤差の問題がほとんどなくなる。
また,星形成は大半が巨大分子雲において集団的に起きていると考えられていること
から,フィールド星も形成時には個々の星団として形成されたものが多いと思われる。
JASMINE は,距離のみならず固有運動のデータももたらすために,星の位相空間での分
布がわかる。星団が破壊されてフィールド星になっても位相空間では星団の名残をとどめ
ている可能性が強い。このことを利用すると,フィールド星を用いても,星形成領域によ
る初期質量の違いが存在するかどうかについての研究が可能になるだろう。これが可能に
なるとサンプル数が多いことや,銀河の星の多数を占める円盤部のフィールド星について
の星形成時の環境効果が調べられることになり,その意義は大きい。
以上のように,非常に重要であるにもかかわらず,現在でも完全な理解にいたっていな
い星の初期質量関数の問題に対して,JASMINE のデータはブレイクスルーをもたらす可
能性が十分にあると考えられる。
12.7 系外惑星探査
12.7 系外惑星探査
太陽系外の惑星を探すことが盛んになってきている。1つには、太陽系以外の惑星の物
理的特徴を探ることによって、惑星系形成の研究を発展させることにある。今までは太陽
系内の惑星しか知られていなかったが、他の恒星にある惑星系を探ることができれば、惑
星系形成に関しては非常に多くのサンプルが集まることになり、より普遍的な法則が見つ
かる可能性がある。もう1つは、やはり、太陽系外での生命体の発見であろう。太陽系内
の惑星ではまだ生命体は発見されていないが、太陽系外の惑星ではどうなのか。これは、
生命の起源や人類の存在意義にも関わる興味深い問題である。
以上の観点などから広く系外惑星探査が行われている。そして、将来の衛星計画として
は、NASA と ESA などが協力して行う TPF(Terrestial Planet Finder) 計画がある。こ
の計画では惑星のイメージを直接観測し、分光観測によって、そこに存在する元素をはか
り、生命体があるのかどうかも探る。2015 年当たりの打ち上げを目指している。日本で
も同様な計画 (JTPF) が検討され始めている。だが、この計画の前に、あらかじめどこに
惑星があるのか、そのターゲットを探っておく必要がある。また、惑星系を探査し、多く
の惑星系のサンプルを集めておくことは、前述したように惑星系形成の解明にとっても重
要である。そこで、系外惑星探査が盛んに行われるようになってきた。その方法として
は、transit、重力レンズ、視線速度測定などがあるが、それらに加えてアストロメトリに
よる方法もある [Perryman, 2000]。実際、NASA の SIM 計画も、SIM により惑星を探
し、それを TPF で詳細に観測するという流れにも成っている。
では、アストロメトリによってどうやって惑星を探すことができるのだろうか? それ
は、恒星運動のふらつきを見つける方法である。分解能が悪い場合、惑星がある場合で
も、恒星と惑星は分離できない。その場合、アストロメトリで観測されるのは、恒星と惑
星の光学中心である。惑星がない場合は、恒星の天球上での運動は、一般的には固有運動
による直線運動と年周運動による楕円運動の組み合わせになるが、惑星がある場合は、惑
星運動の効果により通常の組み合わせ運動からのずれが起こる。そのずれを測定するので
ある。このずれは、もちろん、恒星の視線速度からも測定できる(ドップラー法)。これ
が視線速度での惑星探査の方法である。そして、アストロメトリによる方法とは、このず
れの運動を天球上の星の運動から測定するものである。
この分光による視線速度の方法とアストロメトリの方法は、同じ運動のずれを測定する
ものであるが、2つの方法には以下のような違いがある。
(i) 視線速度による方法:
精度は星までの距離によらない。
惑星軌道の inclination に依存。したがって、求まるのは、惑星質量の下限値。
星の振動、回転によるドップラーシフト効果が混じる可能性がある。
(ii) アストロメトリによる方法
惑星軌道の inclination に依存しない。
星の振動、回転の影響はない。
星までの距離が遠いほど、精度が悪くなる。
以上のように、方法によって長所、短所があるが、この2つの方法を組み合わせること
によって有効な物理情報を取り出すことができる [Mazeh et al., 1999]。ただ、両者の方
131
132
第 12 章 期待される科学的成果の詳細
法とも、惑星の公転周期の約半分以上の観測時間は必要であることは注意すべきである。
さて、アストロメトリによる方法では、今までヒッパルコスのデーや HST のデータ
を用いて惑星の質量の評価などに関しての結果が出されている [Perryman et al., 1996,
Mazeh et al., 1999, Benedict et al., 2002]。しかし、より軽い惑星、または我々から遠い
距離にある惑星を探すためにはより高精度なアストロメトリ観測が必要である。運動のず
れの大きさ α は、以下のように表される。
α=
Mp a
.
M∗ d
ここで、Mp , M∗ はそれぞれ惑星と恒星の質量を表す。また、a は Mp と M∗ の間の距
離、d は太陽系から恒星までの距離を表す。すると、例えば、M∗ = 1M⊙ , Mp = MJ =
0.001M⊙ , a =5AU, d=100pc とすると、α = 50µas となる。従って、このような場合は、
やはり 10µas オーダーの高精度アストロメトリ観測が必要である。このように 100pc の
範囲内で木星質量程度の惑星を探す場合は、GAIA、SIM、JASMINE といった高精度ス
ペースアストロメトリ観測が必要であり、JASMINE でもこのような惑星系は多く検出
できる可能性がある。ただ、地球型惑星は、GAIA や JASMINE でもかなり困難であり、
サブマイクロ秒角オーダーの超高精度観測が必要となってくる。しかし、この場合でも、
主星表面の非一様性(黒点による)の方が、光度中心の移動よりも大きい場合があり、光
度中心のずれを測定するのは困難という問題点は残る。
12.8 重力レンズ天体
12.8.1 位置天文的重力レンズへのブレークスルー
時として、量的変化は質的変化をもたらす。実際、数マイクロ秒の精度に到達すると、
マイクロ重力レンズはマクロレンズに変貌する。
例えば、我々の銀河内の星もしくは MACHO が、LMC や銀河中心といった 10 kpc
オーダーの距離にある光源に対して、レンズとして働く場合を考えてみる。重力レンズの
典型的なスケールはアインシュタイン・リング半径で、角度にすると、およそミリ秒であ
る。これは通常の光学望遠鏡での角度分解能の限界を大きく下回る。よって、明るさの変
化だけが観測可能なので、いわゆる「光度曲線」だけでレンズに関する情報を決める必要
があった。MACHO の場合、「相対速度 (の視線に垂直な成分)」、「レンズ質量」、「レン
ズまでの距離」、「視線に対する最近接距離」の 4 つのパラメータに対して、光度曲線は
「増光率」と「増光時間」の 2 個の情報しか持ち合わせない。よって、パラメータ空間に
縮退があった。これまでは、銀河の質量分布モデルを用いて、確率的に最も確からしい
MACHO 質量の「推定」にとどまっていた。アストロメトリの観測量である光中心位置
は、重力レンズ効果により楕円運動する ([Walker, 1995, Jeong et al., 1999])。この楕円
(2 つのパラメータ) がサブミリ秒の大きさなので、高精度アストロメトリ衛星により観測
可能である。その結果、レンズパラメータ間の縮退が解ける。つまり、MACHO 等のレ
ンズパラメータ、特に、質量が確定できる。
ケプラー運動による楕円運動は周期運動であるが、重力レンズによる楕円運動は全く違
う。よって、多数回の観測をすれば、これらは区別出来る。最適な回数は観測対象天体の
等級・個数等に依存するので、この検討は今後の課題である。
12.8 重力レンズ天体
なお、SIM、GAIA は可視光であるが、近赤外の JASMINE の場合、銀河中心方向の
レンズに対して圧倒的に有利である。よって、JASMINE を用いた観測によって、褐色矮
星型の MACHO だけでなく、銀河中心方向の巨星崩壊型のブラック・ホールの発見そし
て、存在確率の議論ができるようになる。頻度等の詳しい評価を今後行ないたい。
12.8.2 系外惑星による重力レンズ
我々が暮らす地球のような環境は、宇宙において特別なのか、ありふれたものなのか、
という古くからの疑問に答えるのが、系外惑星科学である。この系外惑星科学は、間違い
なく、21 世紀の天文学の主流の一つになるであろう。従来からのドップラー法は、木星
のような大型惑星かつ、水星のような短い公転軌道のものに制限されていた。さらに、食
をおこす場合を除き、軌道面の傾きの不定性のため、質量は下限値しか与える事が出来な
かった。位置天文観測では、主星の視線に対する横の動き (楕円になる) から、惑星の存
在を知ることができる。これにより、長周期の系外惑星の発見が可能となる。軽い惑星の
場合、主星の運動がなす楕円は極めて小さい。
こういった状況に対しても、重力レンズ効果が期待できる。重要なのは、銀河内の星が
作る重力レンズの典型的大きさであるアインシュタイン・リング半径がおよそ 1 天文単
位である事である ([Mao and Paczynski, 1991, Gould and Loeb, 1992])。よって、地球
軌道程度の系外惑星でさえ重力レンズ効果に大きな寄与をする事が最近の研究により明ら
かにされてきた。具体的には、最近接距離がアインシュタイン・リング半径程度の「強レ
ンズ」の場合、地球質量程度でも、数十マイクロ秒程度の大きな歪みが楕円運動に生じる
([Safizadeh et al., 1999])。よって、JASMINE 等によりじゅうぶん検出出来る。最近接
距離が大きな「弱レンズ」の場合、効果は惑星の質量に正比例するので、木星質量程度で
さえマイクロ秒程度にとどまる ([Asada, 2002])。よって、検出は大変困難であるが、大
きな最近接距離のため確率が大きいので、考慮に値するかもしれない。褐色矮星なら数十
マイクロ秒の効果になるので、恒星・褐色矮星の連星の検出は大いに期待できる。重力レ
ンズ効果は質量に直接依存するので、ドップラー法のような軌道面の傾きの不定性による
問題がない事を付け加えたい。
12.8.3 重力理論の検証
基礎物理学へのインパクト
重力レンズ効果はもともと銀河の星によるものだけではない。我々太陽系の重力も大変
重要である。太陽による重力レンズ (時間遅れ) は、およそ 1.7 秒の曲がり角を作る。現
在では、VLBI 観測 (約 500 マイクロ秒の精度) により、アインシュタインの一般相対性
理論が 0.01% の精度で確かめられている (レビューとしては、[Will, 1993])。数マイクロ
秒では、0.0001% の精度で検証可能である。アインシュタイン理論の有力な対抗馬である
スカラー・テンソル理論は、多くの素粒子理論家によって精力的に研究されている「超弦
理論」から、その低エネルギー極限での自然な帰結として示唆されている。そして、重力
レンズ効果の精密測定によって、このスカラー・テンソル理論への強い制限を与える事が
できるので、素粒子物理学へのインパクトも大きい。場合によっては、一般相対性理論か
らのずれという大発見の可能性も秘めている。この場合、アストロメトリという天文学観
133
134
第 12 章 期待される科学的成果の詳細
測によって、新しい物理学の扉を開く事になる。事実、低エネルギー極限とはいえ、スカ
ラー・テンソル理論を地上の高エネルギー加速器で検証するのは、特殊なシナリオ (高次
元理論等) を持ち込まない限り、現時点のエネルギーレベルではとても期待できない。こ
うして、重力理論の検証に関して、JASMINE のような高精度アストロメトリは高い潜在
能力を備えている。
12.8.4 Astrometric Microlensing と JASMINE
JASMINE データの解析においては、太陽系内・系外の天体の重力レンズ効果によ
る、位置のずれの効果が一般に無視できない。太陽系内天体については位置のずれを
予測し、修正することが一般に可能である。一方、太陽系外の天体、特に銀河ディス
ク・バルジに存在する、JASMINE の限界等級よりも暗い星による重力レンズ効果 (e.g.
[Miyamoto, 1995]) では、暗い星の位置を特定できないので、ある星の天球上の位置が真
の位置なのか、それとも暗い星によるマイクロ重力レンズによって位置がずれているのか
が問題となる。すなわち、マイクロ重力レンズは一般には、位置決定へのノイズとして
の、ネガティブな側面をもつ。
一方、見方を変えれば、マイクロ重力レンズ効果はポジティブな側面も持つ。観測して
いる星たちの、マイクロ重力レンズ効果による天体位置のずれを検出することが出来れ
ば、その頻度分布の統計から、銀河系内の暗い星の分布や運動に対する、アストロメトリ
観測とは独立な議論が可能となるからである。
ポジティブ・ネガティブのどちらの側面が強いかは、観測される星の光がマイクロ重力
レンズを受ける確率 τA に依存している。τA ∼ 1、つまりほとんどすべての星がマイクロ
重力レンズ効果を受けていると、見かけの位置が常に揺らいでいることになるので、星の
相対位置が精度よく決定できないことになる。つまりネガティブな側面が強くなる。逆に
τA ≪ 1 ならば、ほとんどの星の位置は揺らいでいないので、ネガティブな側面は問題と
ならない。むしろ、あるひとつの星のマイクロ重力レンズ効果による位置ずれを、位置の
ずれていない他の星との相対位置の比較によって検出することが可能となる。このように
して検出できるマイクロ重力レンズ効果の数が十分多ければ、ポジティブな側面が強くな
ることになる。
τA の見積もりを以下に示す。観測しているひとつの星からの光が、もうひとつの暗い
星によって重力レンズをうけると、一般には増光あるいは減光された複数の像ができる。
ただ、JASMINE の場合、これらの星の像を直接分解することはできない。その代わり
に、各星像の増光率を重みとした平均の星像中心位置の位置ずれが観測される。いま観測
天体が距離 DS にあって、観測者と観測天体の間の距離 DL のところに、質量 M の暗い
星 (レンズ天体) があるものとする。観測者からの観測天体への視線と、レンズ天体との
距離を b とすると、星像中心の位置ずれの大きさは
δ=
1 RE
u RE
≃
u2 + 2 DL
u DL
(12.10)
と計算される。ただし、u = b/RE 、RE はアインシュタイン半径と呼ばれる、重力レンズ
12.8 重力レンズ天体
135
12.5 マ イ ク ロ 重 力 レ ン ズ に よ る 星 像 中 心 位 置 の 変 化 (from
[Dominik and Sahu, 2000])。δ|| と δ⊥ は そ れ ぞ れ v⊥ に 平 行 な 方 向 と 垂 直 な
方向へのずれを表す。Astrophysical Journal 534, 213-226 より、p220 Fig.4 を引用。
図
の特徴的スケールで、
√
RE =
x=
4GM
DS x(1 − x)
c2
(12.11)
DL
DS
(12.12)
で与えられる。u は観測天体とレンズ天体との相対運動によって時間的に変化する。時刻
を t、相対運動の速度の視線方向に垂直な成分を v⊥ 、レンズ天体が視線に最も近づくとき
の時刻を t0 、そのときの u を u0 、tE = RE /v⊥ とすると、u(t) =
√
u20 + (t − t0 )2 /tE で
ある。この場合の星像中心位置のずれの時間変化を図 12.5 に示す。
いま JASMINE が角度 δA の位置ずれを検出できるものとすると、概算では u ≤ uA ≃
RE /(DS δA ) の範囲の u のマイクロ重力レンズイベントが観測可能となる。レンズの質量
関数を ψ(M )、レンズの密度分布を ρ として、光学的厚み τA は
∫
∫
1
∞
ρ(x)
π(uA RE )2
(12.13)
M
0
0
)−2 (
)(
)
(
M̄
DS
δA
≪1
≃ 5 × 10−3
(12.14)
10µas
0.5M⊙
8.5kpc
∫
と見積もられる。ただし M̄ = M ψ(M )dM である。銀河系ディスクの質量密度のモデ
τA =
DS dx
ψ(M )dM
ルとして、スケール半径 3.5kpc、スケール高さ 300pc、太陽近傍での質量面密度 50M⊙
pc−2 の指数関数的ディスクを仮定すると、銀緯 <2°では銀河面全域で 1 × 10−3 < τA <
5 × 10−3 、銀緯 <7°では銀河面全域で τA > 1 × 10−4 と計算される。したがって、マイ
クロ重力レンズの、位置決定へのノイズとしてのネガティブな影響は、ほとんどの星で問
題にならない。
JASMINE での典型的な値として、δA = 10µas、M ≃ 0.5M⊙ 、DS = 8.5kpc とする
と、uA ≃ 200 となり、RE よりかなり大きい b をレンズ天体が通過しても、位置ずれ
136
第 12 章 期待される科学的成果の詳細
図 12.6 マイクロ重力レンズイベント検出効率のシミュレーションの結果。uA > 20
では検出効率は非常に小さくなることがわかる。
を理想的には検出できる。また、図 12.5 のような軌道を描いて位置がずれている期間
= uA tE = 20 年程度である。このような長いイベントでは、パララックス効果、つまり地
球の公転によって位置が図 12.5 の軌道からさらにずれる効果も観測できる。
ただ、JASMINE の観測期間は数年しかないので、位置ずれの軌道がすべて見られる
わけではない。そこでイベント検出効率のシミュレーションを行った。星像中心位置が
20µas の精度で求まったものとして、マイクロ重力レンズによる星像中心の位置ずれを、
パララックス効果も考慮に入れて、軌道の最小自乗法フィッティングによって検出できる
効率を求めたところ、図 12.6 のような結果を得た。uA > 20 では検出効率は非常に小さ
くなることがわかる。この制約のため、理想的な場合に比べ、マイクロ重力レンズイベン
トとして検出できるイベント数は 2 桁程度下がることになる。JASMINE は数億個の星
を観測するので、マイクロ重力レンズ効果が観測できる星の数は 103∼4 個程度と見積もら
れる。これだけの数の重力レンズが検出できれば、銀河面内の質量分布に対し、従来の重
力レンズ観測よりも詳細な統計的議論ができると期待される。
以上に見たように、10µas スケールの位置天文観測におけるマイクロ重力レンズ効果
は、ポジティブな側面が強く、検出の意義は大きい。JASMINE のデータから、この効果
12.8 重力レンズ天体
を考慮に入れて解析していくことが重要である。今後さらに詳細なシミュレーションを進
めていく。
12.8.5 位置マイクロレンズ現象によるダークマターの質量とサイズの
決定
導入
ダークマターの大部分は非バリオン的物質であることが CMB 観測や複数の元素
量 の 観 測 と 初 期 宇 宙 の 元 素 合 成理 論 か ら 強 く 示 唆 さ れ て い る [Spergel et al., 2003,
Benoı̂t et al., 2003, O’Meara et al., 2001] 現実には、バリオン的物質の構成について
も決着はついていない [Fukugita et al., 1998] 。バリオン的物質の中でブラックホー
ルや褐色矮星のように高密度でコンパクトな天体 (MACHOと呼ばれる) は、マイク
ロレンズ効果によって検出できるということが 1986 年に Paczyński によって提案され
[Paczyński, 1986] 、1990 年代に実際に光度曲線が複数のグループによって観測された
[Alcock et al., 2000, Lasserre et al., 2000] 。一方で、極限散乱現象の観測を説明する天
体として、0.1 から 10 木星質量で 1-100AU 程度の大きさを持つ低温ガス雲の存在が指摘さ
れている [Gerhard and Silk, 1996, Kamaya and Silk, 2002, Walker and Wardle, 1999]
。
一方、JASMINE 計画をはじめとする位置決定精度 10µ 秒角を目指した観測プロジェ
クトが計画されている (電波観測では VERA 計画 [日本]、可視光観測では SIM[米国]
や GAIA[欧州])。これらの計画に触発され、1990 年代中ごろから位置マイクロレンズ
レンズ効果を利用したレンズ天体や光源に関する研究が増加しはじめた。レンズ天体
の質量、インパクト・パラメータ、横断速度を位置マイクロレンズ効果を受けた光源の
軌道から求める方法は過去に多くの研究者によって研究されている [Paczyński, 1995,
Paczyński, 1998, Miralda-Escudé, 1996] 。しかし、ここでレンズ天体の正体を知ること
を目的とした場合、その質量のみを求めるのでは不十分である。理由は同じ質量を持った
複数のレンズ天体の候補 (ブラックホール、白色矮星、褐色矮星、低温ガス雲など) を区別
できないからである。レンズ天体の質量の他にサイズを観測的に求めることができれば、
密度を求めることができこれらの候補をすべて区別することが可能となる。そこで、次の
セクション以降ではレンズ天体のサイズの効果を考慮した位置マイクロレンズ現象の光源
の軌道を求め、その観測可能性を議論する。そこでは、球対称で光学的に厚いレンズ天体
を考える。一般に、レンズ天体のサイズの効果が観測可能な量として現われるのはまれで
あるのだが、過去の観測により運動が特定されている天体 (ヒッパルコス天体など) の中
にレンズ天体のサイズの効果が観測可能な量として現われる天体が 49 天体見つかってい
る [Takahashi, 2003] 。
有限の大きさを持つレンズ天体による位置マイクロレンズ効果
像の軌道
次のような無次元距離ベクトルを定義する:⃗
u = (⃗
φs − φ
⃗ l )/θE 。ここで、φ
⃗ s 及び
φ
⃗ s はそれぞれレンズ天体と光源の角位置、θE は角アインシュタイン半径で θE =
137
138
第 12 章 期待される科学的成果の詳細
√
(4GM/c2 )(Dls /Dl Ds ) で定義される。ここで、M はレンズ天体の質量、 G は重力定
数、c は光速で、Dl 、Ds 、Dls はそれぞれレンズ天体までの距離、光源までの距離、レ
ンズ天体と光源間の距離である。レンズ天体と光源が最接近時を時間の原点 t = t0 とす
る。角アインシュタイン半径で規格化したインパクトパラメータを u0 とする。このとき、
u = |⃗u| で定義される無次元距離 u は次のようになる。
√
t − t0
u = u20 + τE2 , ただし τE =
。
tE
(12.15)
ここで、tE は角アインシュタイン半径の横断に要する時間であり、µ をレンズ天体と光源
の相対角速度とすると tE = θE /µ となる。まず、点状のレンズ天体が横断する際に+像
と−像の重心、+像、−像の軌道を求める。
レンズを受けていないときの光源の位置からのずれを現す+像と−像の重心の位置ベク
⃗c は [Dominik and Sahu, 2000]、
トル θ
θ⃗c =
u
û
u2 + 2
(12.16)
と現される。ただし、û = ⃗
u/u である。この式は角アインシュタイン半径で規格化してあ
⃗c の、レンズ進行方向の成分 θcx とそれに垂直な方向の成分
る。この重心位置ベクトル θ
θcy は
(
=
θ⃗c = (θcx , θcy )
)
−τE
u0
,
。
u2 + 2 u2 + 2
(12.17)
(12.18)
(θx , θy ) 空 間 上 で 図 12.7 の よ う に 現 さ れ 、軌 道 は 次 の 式 で 記 述 さ れ る 楕 円 と な る
[Walker, 1995] 。
θcx 2
(θcy − b)2
+
= 1,
2
a
b2
(12.19)
ここで a と b はそれぞれ楕円の長軸と短軸であり、
1
a= √ 2
,
2 u0 + 2
b=
u0
+ 2)
2(u20
(12.20)
である。図 12.8 では、重心の軌道は太線で表している。θx 軸方向の最大変位は τE =
√
±τc = ± u20 + 2 のときに実現される。τE = −τc のとき、重心位置ベクトル θ⃗c は
(θcx (τc ), θcy (τc )) = (a, b) である。θy 軸方向の最大変位は τE = 0 のときに実現され、こ
⃗c (θcx (τE = 0), θcy (τE = 0)) = (0, 2b) である。
のときの重心位置ベクトルは θ
同様に、レンズを受けていないときの光源の位置からのずれを現す+像位置ベクトル
θ⃗+ は次のようになる。
−u +
θ⃗+ =
√
u2 + 4
û。
2
(12.21)
⃗+ の (θx , θy )
これは角アインシュタイン半径で規格化されている。この+位置ベクトル θ
空間での成分は
θ⃗+ = (θ+x , θ+y )
)
(
√
√
−u + u2 + 4
−u + u2 + 4
, u0
, .
= −τE
2u
2u
(12.22)
(12.23)
12.8 重力レンズ天体
139
図 12.8 重心 (太線) と+像 (破線)
図 12.7 レンズ天体と光源の位置
の軌道と各点での時間。
及び+像、−像、その重心の軌道。
である。式 (12.22) と式 (12.23) から、u2 = u20 [1 + (θ+x /θ+y )2 ] を得、この式と式 (12.22)
の θ+y から u2 を消すと 2θ+y + u0 =
√
u20 + 4/((θ+x /θ+y )2 + 1) を得る。よって、+像
の軌道は
2
2
−
+ θ+y
θ+x
θ+y
= 0,
θ+y + u0
(for 2θ+y + u0 > 0).
(12.24)
となる。θ+ 軸方向の最大変位は τE = ±τ+ のときに実現し、
{ (
τ+ =
√ )1/3 ( 4 √ )1/3
4
− Q
2u
√ 0 + Q( + 2u0√
)
2
1
2 3 u0 cos 3 arccos(6 3u0 )
ifQ ≥ 0
ifQ < 0
(12.25)
である。ここで、Q = (4u20 − 8/27)u60 である。式 (12.25) は、∂θ+x /∂τE = 0 から得ら
れる u2 の3次方程式 u2 as u6 − 2u20 u2 − 4u40 = 0 の u2 > 0 を満たす解から得られる。
τE = −τ+ のとき、+像位置ベクトル θ⃗+ は (θ+x (τE = τ+ ), θ+y (τE = τ+ )) = (a1 , b1 ) と
なり、これは図 12.8 で破線で表されている。θy 軸方向の最大変位は τE = 0 の時に実現さ
⃗+ は (θ+x (τE = 0), θ+y (τE = 0)) = (0, b1 + b2 ) である (図 12.8)。
れる。τE = 0 のとき、θ
⃗−
次に、レンズを受けていないときの光源の位置からのずれを現す−像位置ベクトル θ
は次のようになる。
−u −
θ⃗− =
√
2
u2 + 4
û。
(12.26)
⃗+ の (θx , θy ) 空間で
これは、角アインシュタイン半径で規格化してある。このベクトル θ
の成分はそれぞれ、
θ⃗− = (θ−x , θ−y )
)
(
√
√
u + u2 + 4
u + u2 + 4
, −u0
.
= τE
2u
2u
(12.27)
(12.28)
となり (図 12.7)、軌道は次のようになる。
2
2
θ−x
+ θ−y
−
θ−y
= 0,
θ−y + u0
(for 2θ−y + u0 < 0)
(12.29)
ここから、角半径 θlens をもつ球対称レンズ天体を考える。このレンズ天体は光学的に
深い物質で構成されているものとし、光源は点状のものを考える。θl を角アインシュタイ
140
第 12 章 期待される科学的成果の詳細
図 12.9 θcrit± の u0 依存
性とタイプ A、B、C の
分類。
図 12.10 タイプ A、B、C
図 12.11 タイプ A、B、C
の (θx , θy ) の時間依存性。
の軌道。
ン半径で規格化したレンズ天体の半径とする。即ち、θl = θlens /θE である。光源からの光
子の軌道が有限の大きさを持つレンズ天体にぶつからない限りは、上で記述した点状のレ
ンズ天体の場合の計算はそのまま適用できる。レンズ天体にぶつかった光子は観測者に届
かない。レンズ天体の角半径が角アインシュタイン半径よりも小さいか小さくないかの2
通りの場合が考えられる:(i) θl < 1 及び (ii) θl ≥ 1。(i) の場合、次の2通りの軌道があ
る:(A) θl < θcrit− and (B-1) θcrit− < θl < 1。同様に、(ii) の場合には次の2通りの軌
道がある:(B-2) 1 ≥ θl < θcrit+ 及び (C) θcrit+ ≥ θl 。ここで、θcrit+ はレンズ天体と+
像の最接近時の角距離であり、θcrit− はレンズ天体と−像の最接近時の角距離である。両
者とも角アインシュタイン半径で規格化すると、次のようにインパクトパラメータ u0 を
用いて表わされる。
θcrit+
√
√
u20 + 4 + u0
u20 + 4 − u0
=
, θcrit− =
2
2
(12.30)
B-1 と B-2 は同じタイプの軌道を作るので、両方をあわせてタイプ B とする。図 12.9 に
θcrit± を u0 の関数としてプロットしている。まずタイプ A 軌道の場合、有限サイズの
レンズ天体が |τE | > τA の間、−像を隠し、+像のみが現われている。τE = ±τA のと
きに、レンズ天体と−像の距離がレンズ天体の半径に等しくなる。τA は、 式 (12.15) と
θl = |(u −
√
u2 + 4)/2| から計算され、
√(
τA =
1
− θl
θl
)2
− u20 .
(12.31)
となる。−τA < τE < τA の間は、+像と−像の両方が現われている。次にタイプ B 軌道
の場合、有限サイズのレンズ天体が常に−像を隠している。+像は常に現われている。最
後にタイプ C 軌道の場合、有限サイズのレンズ天体が−像を常に隠し、|τE | < τC の間だ
け+像を隠す。τE = ±τC のとき、レンズ天体と+像の距離がレンズ天体の半径に等しく
12.8 重力レンズ天体
141
なる。タイプ A の場合と同様に、式 (12.15) と θl = (u +
√(
τC =
1
θl −
θl
√
u2 + 4)/2 から、τC は
)2
− u20 .
(12.32)
と計算される。|τE | > τC のとき、+像が現われている。
図 12.10 にタイプ A、B、C の θx と θy の時間変化を太線で示している。点線と破線は
それぞれ点状レンズ天体の場合の重心像と+像の時間変化を表わしている。図 12.11 にタ
イプ A(上図)、B(中図)、C(下図) の場合の軌道を太線で表わしている。点線と破線はそれ
ぞれ点状レンズ天体の場合の重心像と+像の軌道を表わしている。タイプ A 軌道では不
連続点が軌道上にあり、この不連続点では像が一方の点から他方の点に一瞬で移動する。
しかし、これは光源の大きさを無視したためで、有限の大きさの光源を考えるとこの不連
続性はならされる。タイプ C 軌道にも不連続点が存在し、この不連続点の間は+像と−
像の両方が隠されている。この間、光源は完全に隠されているので何も観測されない。タ
イプ A と同様に有限の大きさの光源を考えるとこの不連続性はならされる。
物理量の縮退関係
球対称有限サイズのレンズ天体と点状の光源を考える場合、像位置の軌道は次の4つの
物理量で決定される:θE 、u0 、µ、θl 。θE と u0 は重心軌道 (楕円軌道) の全体のスケー
ル (例:a、b) から、または+像軌道の全体のスケール (例:a1 、b1 、b2 ) から決定される
[Dominik and Sahu, 2000] 。レンズ天体の角速度 µ は像の時間変化から決められ、角ア
インシュタイン半径で規格化されたレンズ天体の半径 θl は、軌道の不連続点から決定さ
れる。
点状のレンズ天体を扱った数多くの論文で、軌道からの θE 、u0 、µ の決定法が述べら
れている。例えば、インパクトパラメータ u0 は b/a または b1 /a1 から決まる。a/b から
は u0 は次のように決まる。
√
2
.
(a/b)2 − 1
u0 =
(12.33)
同様に、a1 /b1 から u0 を決めることもできる。
ここでは、過去の研究で述べられていない軌道上の不連続点からのレンズ天体の角半径
θl の決定について述べる。レンズ天体からの+像と−像までの角アインシュタイン半径
で規格化した距離 θp と θm は次の関係を満たしている。
θp · θm = −1,
θp + θm = u,
(12.34)
同様に、レンズ天体からの+像と−像までの角アインシュタイン半径で規格化した距離
θ+ (= θp − u) と θ− (= θm − u) は次の関係を満たしている。
θ+ · θ− = −1,
θ+ + θ− = −u.
(12.35)
タイプ A 軌道の場合は、τE = τA のときレンズ天体の半径とレンズ天体と+像の距離が
等しい (i.e. θl = −θm )。式 (12.34) と式 (12.35) から
θl = θ+ .
(12.36)
を得る。−像が現われる直前は像の位置は θ+ である。同様にタイプ C 軌道の場合、
τE = τC のときレンズ天体の半径とレンズ天体と+像の距離が等しい (i.e. θl = −θp )。式
142
第 12 章 期待される科学的成果の詳細
(12.34) と式 (12.35) から
θl = 1/θ+ .
(12.37)
を得る。+像が現われる直前は像の位置は θ+ である。θE が決められていれば、式 (12.36)
と式 (12.37) からレンズ天体の角半径が観測量になっていることがわかる。
タイプ A 軌道とタイプ C 軌道の場合は θl を観測的に唯一に定めることができるのであ
るが、タイプ B 軌道の場合には θl の上限 θl,upper と下限 θl,lower のみを軌道から決めるこ
とができる。これは、タイプ B の軌道 ( θl,lower < θl < θl,upper ) では軌道はレンズ天体
の半径に独立であるからである。図 12.9 からもこれは読み取ることができる。式 (12.30)
より、θl,lower = θcrit− と θl,upper = θcrit+ となる。
像の視差が測定されていない場合には、縮退のない観測量は角アインシュタイン半径
θE 、レンズ天体と光源のインパクトパラメータ u0 、レンズ天体の天球上の角速度 µ、レン
ズ天体の角半径 θl である。視差は衛星と地球からの観測またはレンズ天体が近い場合に
は地球の公転を利用することによって測定できる場合がある。もし、レンズ天体と光源間
の視差が測定された場合は、縮退のない観測量はレンズ天体の質量、(実際の) 横断速度、
レンズ天体と光源の実際のインパクトパラメータ、レンズ天体の実際の大きさとなる。
観測可能性ここでは、レンズ天体の半径の情報を持つ位置マイクロレンズ効果を受けた像
の軌道の観測可能性について議論する。図 12.12 は、角アインシュタイン半径 θE (上図)、
角アインシュタイン半径 θE で規格化したレンズ天体の角半径 (中図)、軌道のタイプ (A、
B、C) の境界を示すインパクト・パラメータ u0 を表した図である。横軸はレンズ天体ま
での距離 (10−3 ∼ 10 kpc) で、光源までの距離は 100Mpc としている (光源までの距離を
50kpc としても図はほとんど変わらない)。点線、破線、実線はそれぞれ太陽タイプ、木星
タイプ、低温ガス雲タイプ (質量は 1 木星質量でサイズは 1AU) のレンズ天体の場合を示
している。レンズ天体の角半径を軌道から求めようとした場合、軌道の正確な形状がとら
えられる必要がある。まず、タイプAの軌道の場合、 軌道上の不連続点が観測される必要
がある。これは、−像がレンズ天体に隠されるときや現われるときに、レンズのサイズの
効果が観測される像の位置が+像の軌道上から+像と−像の重心の軌道上へ (またはその
逆) の移動として現われるからである。この移動は τE = ±τA の時に起こる。この不連続
点間の角距離 |θ+ − θc | は、次の式で現されるように角アインシュタイン半径で規格化し
たレンズ天体の角半径 θl (= θlens /θE ) のみの関数である。
|θ+ − θc |τE =τA =
θl3 (θl2 + 1)
.
θl4 + 1
(12.38)
⃗+ |、θc = |θ⃗c | である。図 12.13(上図) に、横軸をレンズ天体までの距離
ここで、θ+ = |θ
として 3 種のレンズ天体の |θ+ − θc |τE =τA をプロットしている。
タイプ B の軌道の形は+像の軌道を表す式 (12.24) で記述される。+像と−像の重心
の軌道は楕円形をしているのであるが、+像の軌道は楕円に似ているが楕円ではない。故
に、軌道がタイプ B であるかを判定するためには、タイプ B 軌道を観測的に楕円と区別
することが必要である。図 12.8 からわかるとおり、b1 の値は b2 とは異なる (b1 ̸= b2 )。
であるので、タイプ B 軌道を判別するには、例えば b1 と b2 の差 (|b1 − b2 |) が観測的に
とらえられればよい。前のセクションで述べたように、タイプ B の軌道からはレンズ天
体の角半径の上限と下限のみを求めることができる。図 12.13(中図) に3種のレンズ天体
12.8 重力レンズ天体
143
について |b1 − b2 | をインパクト・パラメータ u0 とレンズ天体までの距離 Dl の関数とし
てプロットした。
タイプ C の軌道の場合には、タイプ A の場合と同様に軌道上の不連続点をとらえるこ
とによりレンズ天体の角半径を求めることができる。不連続点は τE = ±τC の時に起こ
る。不連続点間の距離 2|θ+x |τE =τC は次の式のように現される。
√
|2θ+x |τE =τC = 2(θl + 1)
1
u2
− 2 0 2.
2
θl
(θl − 1)
(12.39)
これは、角アインシュタイン半径で規格化されたレンズ天体の角半径 θl とインパク
ト・パラメータ u0 のみによって決まる。図 12.13(下図) に3種のレンズ天体の場合の
2|θ+x |τE =τC をプロットした。
図 12.13 から、レンズ天体が非常に近い (1-100pc) 場合以外は、タイプ A に分類される
星、惑星、白色矮星、褐色矮星などは 10µ 秒角の位置決定精度では一般にサイズの効果を
とらえるのは難しいことがわかる。しかし、低温ガス雲状の天体であれば、10µ 秒角の位
置決定精度で十分とらえることが可能である。*1
solar-type
Jupiter-type
cold gas
図 12.12
*1
3 種のレンズ天体の諸量
solar-type
Jupiter-type
cold gas
図 12.13
3 種のレンズ天体の諸量
こ の 章 で は 、文 中 の 参 考 文 献 の 他 、[Alcock et al., 1998]、[Belokurov and Evans, 2002]、
[Honma, 2001]、[Lawrence, 2001]、[Paczyński, 1996]、[Urban et al., 1998] を参考にした。
第 III 部
技術的課題と仕様の最適化
147
第 13 章
位置天文観測の要求分析
13.1 システムエンジニアリングと要求分析
近年、製造分野ではシステムエンジニアリングあるいは Model Driven Architecture、
Model Driven System Engineering などという考え方が適用され始めている。複雑な
システムを設計するうえで、システムの要求を十分に分析して、まず設計を行い、仕様を
策定し、実装を行うという順序を踏むべきであるという考え方である。自動車や家電製品
など製造分野で作られるあらゆるものは、近年様々な機能が付け加えられるようになり、
高度に複雑化している。そういった機能の中には、単純に実装すれば実現することが技術
的に困難であったり、非常に高コストになる場合が少なくない。そういったところに要求
分析を取り入れ、本当に必要な要求だけを実現するいくつかの仕様案を提示してゆくこと
で、技術的困難を回避して設計・製造を可能にすることが、このアプローチの役割である。
早い段階で仕様に落としてしまうと、設計を制限することになり、システムを実現する解
が見つからない。そこで、Model Driven な考え方に従うと、次のようなステップを踏む
ことになる。
1. 仕様とか実装から離れた抽象的な「要求」の抽出を行い、「要求モデル」を作る。
2. 十分に練られた要求に基づいて「仕様モデル」を作る。
3. この仕様を実現するための「設計モデル」を作る。
4. 最後に「実装モデル」に落とし、実際にものを作り始める。
こういうプロセスを踏むことで、複雑かつ困難に見えるサイエンスミッションにおいても
実現可能な解が見つかると期待される。
この作業の中で最も困難なのは、要求を抽出することである。システムエンジニアリン
グの入門書には、「要求を仕様に落としてはいけない」といった内容が必ず書いてある
が、では真に要求は何かを見極めることは、分析作業を進めて行く上でもっとも困難な作
業のひとつである。つい「仕様」に落としてしまい、実現が困難な要求しか出てこないこ
とになってしまう。また、入門書には「大抵の客は真の要求を知らない」 とも書かれて
いる。開発は顧客の依頼に基づく商品開発であることを仮定していて、科学衛星では客は
ミッションを行う科学者である。
148
第 13 章
位置天文観測の要求分析
うまく要求を抽出した例として、ここで新幹線の改札機の例をあげる。この話は、実際
の新幹線改札機*1 を開発した会社の社員から聞いた話である。新幹線の改札機が他の在来
線や地下鉄の改札機に比べて長いことに気が付いているだろうか。この理由はなんだろう
か。地下鉄や在来線の改札機は一枚のみの切符を処理すればよいが、新幹線の改札機で
は、回数券では一枚、乗車券と特急券が分かれていれば二枚、在来線からの乗り継ぎがあ
ると三枚の切符を処理する必要がある。一般的な例として乗車券と特急券を入れる場合を
考えても、客が乗車券を上に重ねて入れるか特急券を上に重ねて入れるかは分からない。
改札機の中には乗車券を処理する装置と特急券を処理する装置があるが、これらの装置に
適切に切符を送り込んでやらなければ処理ができない。そのため、
1. 二枚の切符を分ける
2. それぞれが乗車券か特急券かを判断する
3. 必要に応じて切符の上下を入れ替えて、乗車券は乗車券処理装置に、特急券は特急
券処理装置の送り込む
4. 乗車券と特急券が valid なものかどうかを判断する
5. 二枚の切符を再び重ねる
6. 両方の切符が valid であればゲートを open に、どちらか一方でも valid でなけれ
ばゲートを closed にする
7. 切符を取り出し口から出す。
という複雑な処理になる。
実際に試作品を作ってみたところ、改札機が遅いという苦情が挙げられた。解決策とし
て、以下のようなものが考えられる。
1. 革新的な技術開発によって高速化する
2. 遅いと言っても約 2 秒強程度で、現実的にたとえば処理しきれない客がいるとか、
この遅延で乗り遅れる客が多発するというような、問題になる遅さではないと、購
入者 (JR) を説得する
3. そもそも紙の切符を使うことが問題なので、紙以外の手段を用いる
1 番目の解は、当時の技術では困難であった。2 の解決策を取っていたとしたら、顧客は
別の会社に改札機を注文することになっただろう。3 の解は現代的にはあり得るだろう
が、IC カードの利用が可能になったのはつい先日、2008 年 3 月 29 日であり、また完全
に紙の切符を失くさなければならないということだから、さらにまだ時間がかかるであろ
う。しかし、この会社は上記 3 つ以外画期的な解を考え出した。それが、
4
改札機を長くする
というものである。改札機の中を歩く時間と処理に必要な時間をほぼ同じにして、乗客に
「待たされている」という感覚を与えないという解決である。つまり、乗客の真の要求は
機械の処理を速くすることではなく、改札機を通過する際に待たないことであったことに
気が付き、そういう形で困難な開発課題を解決した例である。
*1
2008 年 3 月まで稼動していたタイプ。2008 年 3 月 29 日より IC-EX サービスが開始され、このタイプ
の改札機は新しいものに置き換えられた。
13.2 位置天文観測の要求
149
図 13.1 要求整理。赤い線で示したものはオプションで、黒い線を実現するのにどれ
か一つのうすい線を実現すればよい。濃い線で示したものは要求であり、上流 (図左側)
のオプション (うすい線) を実現するにはつながった濃い線 (要求) がすべて満たされる
必要がある。
13.2 位置天文観測の要求
JASMINE をはじめとする近年の天文ミッションも要求が高度であるため、要求を十分
に分析せずに仕様案を作れば実装可能なシステムが設計できないという点で、こういった
アプローチをとることが重要であると考えられる。
JASMINE では、HIPPARCOS をはじめとするスペースの位置天文ミッションでの解
析手法を分析し、また他の地上での観測・解析手法と比較検討して、図 13.1 のように位
置天文観測に必要な要求分析をしてきた [山田良透, 2005]。
JASMINE は、バルジの力学構造などのサイエンスを行うことが目標である。そこで、
要求 1 (星の数と相対精度) バルジの星 N 個程度の位置と運動を 10% 程度で決
める。
という要求が出てくる。このサイエンス目標と観測バンドを指定すれば、バルジの力学モ
デルより目標とすべき星の数 N が決まり、約 N ∼ 106 個程度あれば十分である。また、
バルジの星と吸収の分布モデルから、バンドを指定すると目標とすべき星の等級が決ま
る。また、バルジの距離はまだ不定性があるがオーダーとして 10kpc 程度であり、従って
年周視差は 100µas 程度である。また 15 章に示すとおり、年周視差から距離を推定する
場合のバイアス効果から精度が 10% という critical な基準がある。これから、目標とす
べき精度は 10µas となる。
精度良く位置を求めるためには、より多くの光子を集めることが必要である。この考え
方に基づいて、簡単に精度を評価した式が、式 (3.1) である。観測波長に関して、銀河バ
ルジ付近を観測する場合、ダストの吸収を避けるため、ダストからの吸収を受けにくい波
150
第 13 章
位置天文観測の要求分析
長が望ましい。このためには、ある程度長い波長が望ましいが、一方で長波長になるほど
回折限界は長くなるし、星からの光子数も少なくなり、不利となる。そこで、z 、I 、J 、K
などのバンドが候補となる。われわれのミッション目標の一つであるバルジの力学構造を
決めるには、バルジに含まれる星の数が約 100 万程度必要である。バンドを決めると、そ
のバンドで何等級まで観測すればよいかが評価できる。銀河モデル [Cohen, 1992] から観
測可能な星の数を評価したところ、z バンドでは約 14 等、K バンドでは約 11 等という評
価が得られている。JASMINE が考えている 2µm 帯の広いバンドで、11 等程度まで観測
すれば十分であろうと予測している (小数点以下の要求等級については今後検討)。また、
観測領域をバルジ領域に絞ったのも、小さい光学系で限られた時間の間で十分な精度を達
成するための選択である。
位置天文では、天球上での星の運動 (ξi (t), ηi (t)) を正確に測定することによって、
αi + µα,i t + πi sin ωtj = ξi (t)
δi + µδ,i t + πi cos ωtj = ηi (t)
の式から各星々の位置天文パラメータ (α, δ, µα , µδ , π)i を最終的に目標精度で求める。
このとき、星の運動を記述する観測装置の座標を同時に校正する必要がある。星の天球上
での運動の時間スケールは約 1 年であるから、1 年の時間スケールで天球上の座標 (ξ, η)i
を目標精度でキャリブレーションする方法を確立することが、位置天文における問題と
なる。
さらに、今回要求分析作業でこの要求をさらに分割した。年周視差、固有運動、位置と
いう 3 種類の位置天文パラメータは、同時に解かれるため、当初は個別の精度を議論する
ことに意味がないと考えてきた。しかし、システム誤差要因を議論する際に、たとえば縦
方向と横方向で異なる精度を持たせるなどの最適化の余地を残すほうが、より実現可能な
解の範囲が広がることが分かってきた。また、年周視差を 10µas で求めたとしてもその
誤差は 1kpc 程度残る。位置天文をカタログ作成ととらえるなら、すべてのパラメータに
ついて 10µas という目標を掲げる意義は大きいが、サイエンスを行うにあたっては、位置
や固有運動の精度は年周視差の精度と同じでなくてもよい。そこで、次のような要求が抽
出される。
要求 2 (精度) 10µas より精度良く年周視差を求める。このため、
• 星の位置の時系列データを最終的に 10µas 精度で年周視差を得ることが可能
な精度で求める。
• 全体に無矛盾な 10µas 精度の時間空間座標系を構築する。
最終的に位置天文パラメータを導出するのに必要なデータは時系列位置データであり、
これを時間的に結合することにより、位置天文パラメータを導出する。星の運動モデルは
太陽系重心座標系で書かれるが、これを精度良く観測データに変換することが必要であ
る。望遠鏡に入射する星からの光の方向を左右する要素は、(1) 衛星の姿勢、(2) 衛星の
位置、(3) 衛星の速度の 3 つである。これらの影響がそれぞれ 10µas 以下であることが要
求される。これらの影響は、星の位置推定の方程式に加算的に加わるため、この三要素の
うち 1 つだけは観測データから推定可能だが、残りの二つは観測データから推定すること
は出来ず、観測データ以外のものから測定・制御・あるいは推定される必要がある。そこ
13.2 位置天文観測の要求
HIPPARCOS
151
ステップの機能
IDT 解析
視野内で星の中心を精度良く求める
大円解析
視野より広い領域で瞬時での星の位置を精度良
JASMINE
Centroid
大フレーム構築
く求める
球面構築
星の位置の時系列データから位置天文パラメー
大フレームの結合
タを推定
座標系固定
天文学の基準座標に照合
座標系固定
表 13.1 位置天文解析ステップの抽象化
で、要求は以下のようなものになる。
要求 3 (生データ) 衛星の位置・速度・姿勢のうち二つの成分が十分な精度で求めら
れている。
それぞれの要求値は、姿勢は天体の位置精度に直接効いてきて 10µas となる。位置は
10µas を出す必要がある最も近い天体の距離を d として 10µas × d となり、たとえば
d = 1pc とすれば、10% の安全率を見込んで 150km が要求値となる。速度推定は、光行
差として効いてくるので光速度に対して 10µas という要求値となり、同じく 10% の安全
率を見込んで 1.5mm/sec となる。これらのうち、姿勢を観測データによらず 10µas で測
定することは非現実的であるため、姿勢は星の位置とともに観測データから推定し、位置
と速度は観測データ以外のものから要求精度で測定あるいは推定することとなる。従っ
て、位置と速度は系統誤差であり、姿勢推定は第一義的にはランダム誤差となる。当然の
ことながら、姿勢推定に何かの測定値が混入すれば、測定手法に依存して姿勢の推定値に
も系統誤差が混入することとなる。
位置天文のデータ解析は、多段階の推定問題である。ここから先の分析は、解析の手法
に依存することになる。以下、3.2 章での分析と同様、位置天文観測のシステム要求を考
察するため最終的なデータから遡って行く。ただ、この段階でも「要求」を安易に「仕様」
に落とさないよう注意することが重要である。ハードウエアに依存しない抽象的な要求を
絞り出した上で、最後にハードウエアに結びつけて行く方法がとれることが望ましい。要
求 2 を満たす統計的に可能なバリエーションは多数あり得る。この中で、推定問題とし
て、統計誤差要因とシステム誤差要因を合わせて考慮する必要がある。HIPPARCOS の
仕様を見ると、解析手法は表 13.1 にあらわされるように抽象化できる。各ステップで何
を既知とし、何を推定するかによって、最終的なハードウエアに課されるシステム要求は
異なったものになるだろう。また、位置天文では最終的な推定における統計的なゆらぎと
誤差 (バイアス) が目標精度以下になればよいのであって、あらゆる装置的な誤差を拒否
するものではない。画期的な推定法が開発されればハードウエアに対する要求は著しく緩
和される余地が残っているし、安易にハードウエア要求に落としてしまえば技術的に実現
不可能な要求になる。
152
第 13 章
位置天文観測の要求分析
要求 4 (時間・空間座標系精度) 10µas 精度の基準座標上で JASMINE の観測結果
を記述するために
1. 時間空間的に無矛盾な 10muas 精度の座標系を構築する
2. 共通原点の絶対的位置と方向を固定する (星の位置の原点のとり方と縮退)
3. 共通原点と方向の時間一次の変化を固定する (星の固有運動のゼロ点のとり方
と縮退)
4. 年周楕円運動に相当する成分を固定する (年周楕円運動のゼロ点のとり方と
縮退)
ノミナルな星の運動を頼りに構築された最終的に無矛盾な座標系は、6 つの不定成分を
持っている。天球の極の位置 (2 成分)、極方向を固定した場合の回転自由度、およびこれ
ら三成分の時間一時変動である。時間一時までしか出てこないのは、星の運動が時間一時
までで記述されていると仮定しているからである。これらは、内部的には解くことができ
ない。HIPPARCOS では、(1) と (2) は外部天体を参照して定め、(3) は大角度はなれた
星を同時に観測することで求めている。JASMINE では、これら 3 つの要素をすべて外
部参照天体に頼るか、あるいは (3) についてはミッション領域が 20◦ 程度あることを利用
して解くか、二つのオプションが考えられる。しかしながら、JASMINE の観測するバル
ジ領域では黄経の差はたかだか 15◦ 程度であり、この領域内にある星の相対位置の年変
動から絶対年周視差を推定するには、目標精度 10µas に対して 10µas × sin 15◦ ∼ 2.5µas
程度の精度で位置を決める必要があり、非現実的である。そこで、サーベイ領域内にある
QSO を利用し、QSO の年周視差と固有運動がゼロであることを利用して、座標系全体の
スケールの年周期および線形での変動成分を、他の星の年周楕円運動と分離することによ
り、推定可能量とする。すなわち、最小二乗推定において、対象となるいくつかの QSO
の年周視差と固有運動がゼロであるという制約条件を付加することになる。可能な解をま
とめておくと、
1. 約 60°程度の広い領域を観測して年周楕円運動の位相の違いから高精度に推定す
る。領域の幅に応じて推定精度が異なる。
2. サーベイ領域の最大の黄経差約 15◦ を利用して、年周楕円運動の位相の違いを
2.5µas の精度で求める。
3. あるいは QSO のような不動の天体を用いる。観測精度に応じて必要な QSO 数が
異なる。
となる。
要求 5 (時間・空間座標系精度) 全体に無矛盾な 10µas 精度の時間空間座標系を構
築するため、
1. 各時刻毎に 10µas 精度の座標系を構築する
2. それぞれの座標を、時間的に無矛盾に結合する
次に、時系列データを記述している座標系の校正をどのようにして行うかを考える。この
ステップでは、すでに各時刻で精度の良い座標系が張られていることを前提にする。こう
13.2 位置天文観測の要求
153
して構築した座標系は、各時刻ごとにサーベイ領域全体に共通の長さと位置が不定とな
る。これを、星の位置天文パラメータと同時に推定することになるが、最終的には、要求
4 で示される三つの成分は推定不可能な量として残ることを許容する。したがって、この
ステップの要求は、サーベイ領域内の相対位置天文パラメータが精度良く求められると言
い換えても良い。
このステップでの精度の分析結果で重要なことは、上の三つの成分と直接かかわらない
不定性 (装置変動などで推定できないものなど) は統計誤差に繰り込むことが可能である
ということである。
この他、スケールと高次歪み (広い意味での distorsion) をこの段階で補正するか、次
(データ解析的には前) の段階で補正するかはオプションとなる。補正の仕方の候補案に
ついては、次で述べる。いずれにしても、これらの基準が詳細な係数を除いて 10µ のオー
ダーでずれるとバイアスとなり、正確な位置天文パラメータを求めることはできない。一
方、必要なのはこの 3 つのモードであり、一年周期での変化と線形変化以外の時間変化は
ランダム誤差と考えて良い。同時刻の座標の校正はこの次のステップの要求となるが、た
とえば HIPPARCOS は大円の一周をあらわす座標のうち 1/6 の長さ周期を持つ成分の校
正精度はあまり良くなく、このステップで校正している。
要求 6 (瞬時座標系精度) 各時刻毎に 10µas 精度の座標系を構築する
次に、観測データから瞬時瞬時の精度良いミッション座標をどのように作成するかを考え
る。ここでは、二次元撮像器を仮定する。一般に、測定には校正が必要である。その要素
は、およそ次のようなものである。
1. ゼロ点と方向
2. スケール
3. 座標の高次歪み
このうち、瞬時の座標系の原点と方向は、前の段階で共通成分を除いて解くので、ここで
問題としているのは瞬時瞬時の座標系を構成する観測センサー座標系の原点同士の関係で
ある。また、スケールも共通成分が残ることが予測されるが、観測センサー座標系同士
のスケールを合わせることがどの程度出来るかが、ミッション到達精度をきめることと
なる。
HIPPARCOS では、大円観測と呼ばれる方法を採用した。これは、大角度離れた二視
野を観測し、年周楕円運動の位相の違いを利用することで、独自に年周視差を求めること
を成功させた。大円上の座標は視野の張り合わせによって求められるが、この精度は高く
ない。ただし、大角度離れた二視野を用いて張り合わせ精度を確保し、さらに二視野の間
の角度 (ベーシックアングル) は大円一周ごとに高精度でキャリブレーションされるため、
ミッション期間にわたって大角度離れた星の相対距離を、精度よく求めることができた。
実際に観測装置を高精度で 1 年の時間スケールでキャリブレーションするかあるいは安定
性を実現するのは技術的に困難だが、この方法を採用することで装置の安定度要求の時間
スケールは大円一周分で済むことになる。ベーシックアングルのキャリブレーションを行
うためには、大円一周が 360◦ であるという普遍的事実を利用している。
JASMINE では、観測フレームを単純に張り合わせることで瞬時のミッション座標を構
154
第 13 章
位置天文観測の要求分析
築することとしているが、これが可能なのは、観測フレーム内に十分多くの星があるから
である。HIPPARCOS では、観測フレーム内には高々 4 つ程度の星しかなく、隣接する
観測フレームの相対位置精度は一回の星の観測精度に対して星の数のルート程度、高々 2
倍程度となる。そこで、ビーム混合鏡を用いることは必須要件であった。JASMINE では
隣接フレームとの間に数千個の星があるので、隣接フレーム同士の位置推定精度は一回の
観測精度約 900µas の
√
5000 ∼ 70 倍程度は向上するはずである。従って、ビーム混合鏡
を使わなくても隣接視野同士の関連は高精度でつけることができる。ただし、ミッション
領域全域を覆う場合、連続して連結を行なうことにより誤差が蓄積する効果を考慮する必
要がある。ビーム混合鏡は主鏡程度の大きな構造物となり、これが主鏡と対面する形で配
置されることは、構造設計を著しく難しいものにする。したがって、サーベイ領域をバル
ジ領域に限定することでビーム混合鏡を排除できたことは、JASMINE の実現性を高める
ことになる。
もし、フレーム連結精度が十分高くできない場合は、観測視野内のある程度長いスト
リップを連続観測し、衛星運動モデルと照合するという、HIPPARCOS が用いた手段を
併用する必要がある可能性もある。連続観測には CCD の場合は TDI モードの動作が必
要であり、このオプションが必須オプションとなるかどうかは張り合わせの精度評価の結
果に依存する。今の所、TDI は必須のオプションとならない見込みである。JASMINE
の場合の具体的な推定精度については、次章で述べる。
要求 5 で推定可能ならば、各時刻の空間座標が張る範囲はサーベイ領域の任意の部分領
域でかまわない。SIM ではたとえば 8 視野を観測する間の熱安定を要求し、これを超え
る時間についてはパラメータを推定している。可能な解としては
1. サーベイ領域のある部分をカバーする間、装置を十分に安定化させる
2. 基準天体や位置天文パラメータが既知の天体を用いて、校正する
3. 装置の変動を推定する
などである。サーベイ領域全体にわたる熱安定が要求でいれば最も安心であるが、このた
めのシステム要求は非常に厳しい。適切な推定と組み合わせて要求を緩和することが望ま
しい。
また、ここで必要なのは、年周視差を精度良く導出するすることである。各点で年周視
差が正しく推定できるのであれば、ほかの位置天文パラメータの精度は多少落ちてもかま
わない。このためには、たとえば視野の連結や装置の熱安定を要求する範囲は、黄道に
沿ったある領域であれば十分である可能性があり、これは十分検討する必要がある。(例
えば 14.6 章参照。)
最後に、観測場所としては地上か軌道上の選択肢があるが、地上観測では大気揺らぎな
どの制限を受けるため、装置を大型化しても精度向上は限定的である。そこで、大気の少
ない軌道上での観測が望ましい。軌道の選択は、熱や通信などの要素を考慮してトレード
オフされる。月や他の天体上という可能性もあるが、軌道上で行うことに比べて特に有利
な要素が見つからない限りは、選択肢にはならないと予想される。
13.2 位置天文観測の要求
図 13.2 フォールトツリー書式で書いた JASMINE の要求整理
さらに、具体的にしたのが図 13.2 である。
155
157
第 14 章
基本仕様と共通課題
14.1 目標精度の根拠
年周視差とは、地球が太陽の回りを公転運動することによる、星の天球上の見かけの
楕円運動の長半径である。この視差は、慣習的に π と書かれるが、これは距離と反比例
関係にある。天文学では、年周視差を秒角 (arcsec、通常は補助単位をつけて mas ある
いは µas を使う) で表すが、年周視差が 1 秒角である距離を、天文学では 1pc と定義し
ていて、これは約 3.26 光年に相当する。例えば、年周視差を π(mas) で表せば、距離は
D(kpc) = 1/π となる。
年周視差から距離を推定する場合、距離と年周視差が反比例関係にあることから、年周
視差の精度が悪くなれば、推定される距離の誤差分散だけでなく、分布の中心もずれる、
即ちバイアスが発生する。このバイアスは、年周視差の精度が 10% より悪くなると無視
できなくなる。このため、距離を推定するには年周視差を 10% 以内で決定する必要があ
る。バルジ全体 (遠方の端は約 10kpc 先) 付近の距離を決定するには、10kpc に対応する
年周視差 (100µas) の 10% 、即ち 10µas の精度の観測が必要となる (15 章参照)。
14.2 基本仕様の導出
図 14.1 及び表 5.1 に、JASMINE の仕様検討に利用されるパラメータがどのような前
提条件できまり、どのように相互に関連しているかを示した。以下、仕様を導出する方法
を順次示す。
位置天文の観測精度は、集めることのできる光子数 N と望遠鏡の口径 D、波長 λ より、
σ = ca
で与えられる。ここで、ca
λ
√
D N
(14.1)
λ
は光子一個当たりの分散を表し、これを便宜的に σ1 と書く
D
ことにする。ca は、PSF 内に分布する光子から星像中心を決定できる精度を表す係数で
あり、値は星像の取り方や中心決定の手法に依存するがおよそ 0.5 である。
今、全ミッション期間を T とすると、光子流束 Fm 、サーベイ領域の角面積を Ωmission 、
視野角面積を ΩFOV として、ひとつの星あたりでは
(
N = Fm T
ΩFOV
Ωmission
)
の光子を集めることができる。Fm 、ΩFOV 、Ωmission が決まれば、この式を逆に用いて、
158
第 14 章 基本仕様と共通課題
図 14.1
仕様を検討するパラメータ同志の関係
理想的な (擾乱や誤差要因が全くなく推定が理想的に行える) 場合に目標精度を達成でき
る時間を決めることができる。これを、理想ミッション時間と呼び、t0 と書くことにする。
光子流束 Fm を評価するには、観測バンド λmin < λ < λmax 、目標等級 m、望遠鏡
aparture のサイズと形状、星像 Window に入る光子の数の比率 Rw などを決める必要が
ある。表 5.1 に示した数値を適用すると、光子流束は 4.4 × 104 個/s となる。ここでは、
∫
λmax
Fm =
λmin
Ap ϵf (740Jy)10−0.4m Rw
dν
hν
を用いているが*1 、詳細は星のスペクトルに依存して 10% 程度の誤差がある。これに一
つの星あたりの観測時間を乗ずれば光子数が算出される。一つの星を観測することができ
る時間と前ミッション領域の比率はおよそ視野とミッション領域の面積比である。
視野サイズは、光学系から決まる。光学系の基本量である焦点距離は、PSF の分布か
ら星像中心を光子統計で得るためには、PSF がが数 pixel に広がっている必要があること
から導出される。ここでは、λ/D が ca = 1.8pixel になる条件から、以下のように焦点距
離を決める。
f = 1.8w
D
= 14.4
λ
現在設計中の光学系では、焦点面として直径 1◦ の円形領域を取ることができる。ここに
正方形的に検出器を並べると、現在の検討中の検出器では 6 × 6 個ならべることができ、
これから視野面積が算出される。
一方、検出器のポテンシャルウェルが Ne = 150, 000e− であることから、中心 pixel エ
ネルギー率 Rc = 0.24(星から星像ウインドーに入る放射エネルギーのうち、最も光子の
*1
1Jy は 10−26 W/m2 · Hz
14.3 誤差要因の列挙
159
密度が高い中心の 1pixel 内に入るエネルギーの比率) を用いて、ms = 9 等級の星までサ
チらずに像を得ようとすれば、一回撮像でとれる最大積分時間が計算でき、
t = 2.24sec
となる。
14.3 誤差要因の列挙
次に、誤差要因の検討を行う。解析は、最小二乗推定で行われる。通常のデータ解析で
は、おおまかな誤差評価に
√
N 則が用いられる。すなわち、入力データの精度を σ 、デー
タ数を N 、推定パラメータ数を M 、出力パラメータの精度を Σ として、
Σ2 =
M 2
σ
N
(14.2)
という式が用いられる。一般的な最小二乗推定では、式 (14.2) は観測方程式の性質など
により係数 V ≥ 1 がかかり、
Σ2 = V
M 2
σ
N
(14.3)
と変更される。線形化された最小二乗問題では、この V は行列の rigidity の逆数に対応
する量である。
通常、この推定問題は連続的な最小二乗法の適用になるので、V は各ステップでの誤差
係数と考えられ、それぞれのステップでの V を掛け算することで、全体の誤差を得るこ
とができる、便利な量である。システム誤差にこの V のような表現をとることは、厳密
ではないが、便利なので、ここでは統一して V を使って誤差を表すことにする。
現在の仕様でのこれらの量は、表 14.1 にまとめた。表 5.1 に示すように、光子一個当た
りの分散を σ1 とあらわす。シミュレーションや簡単な解析的計算などから、
σ1 = ca
λ
, ca ∼ 0.5
D
である。星像あたりの光子数を Nphoton ∼ 8×105 、小フレーム中の露出の数を Nsf ∼ 8、大
フレーム一枚の中で重なり合う小フレームの数を No ∼ 4、大フレームの数を Nlf ∼ 3000
として、最終的に達成される精度 σ は
σ12
Vtotal
Nphoton Nsf No Nlf
∏
= i Vi である。また、ミッション時間 t は、光子流束を
σ2 ∼
で表わされる。ここで、Vtotal
F とすると、
1
Nphoton Nsf No Nlf (1 + rstl + rQt + rread ) (1 + rs )
F
1 σ12
=
Vtotal (1 + rstl + rQt + rread ) (1 + rs ) .
F σ2
t=
で表わされる。
次に、個別の誤差の効果をみる。
まず、光学系が非理想的である場合の誤差であるが、これは波面誤差 λ/8 の場合にお
よそ
Vopt = 1 +
2 ( π )2
∼ 1.051
3! 8
160
第 14 章 基本仕様と共通課題
理想的ミッション時間
−
0.12 yr
波面誤差 λ/8
1.051
100mas/2.4sec
1.16
0.003pixel
1.86
V の値
Voptics
波面誤差
姿勢擾乱誤差
Vatt
centroid 誤差
Vcentroid
30mK/10hr
熱安定
Vsystem
衛星位置精度
150km
2
1.5mm/s
衛星速度精度
Vattc
姿勢制御誤差
TBD
(1)
読み出しノイズ誤差
Vreadout
大フレーム連結誤差
VLF
QSO 基準位置誤差
VQSO
TBD
(1.01)
parallax factor
Vpar
9 か月観測
1.65
TBD
(1)
大フレームから全ミッション連結誤差
VLF2mission
18e
−
1.055
1.81
Vtotal
14.4
時間比率
短期運用時間
rshort
TBD
(0)
静定時間係数
rstl
8秒
0.44
QSO 観測時間/星観測時間
rQSO
15 等、4 個
0.66
読み出し時間/露出時間
rread
0.125 秒
0.055
rs
季節の係数
Vtotal (1 + rstl + rQSO + rread + rs )
0.3333
41.4
表 14.1 誤差要因
図 14.2 姿勢制御による誤差 Vatt の、姿勢安定度に対する依存性。撮像時間内の移動
量が光子の分散程度以上になると、顕著になる。読み出しノイズ Vreadout の依存性。
これは十分小さく、読み出しノイズの低減より読み出し時間の低減のほうが効果が大
きい。
14.3 誤差要因の列挙
161
となる。
姿勢擾乱による誤差は、姿勢擾乱による星像のボケの効果としてあらわれる。姿勢擾乱
の大きさ v と撮像時間 t で
(
Vatt = 1 +
⟨vt⟩
σ1
)
とあらわされる。ここで ⟨vt⟩ は 1σ 値で良いので、線形的な姿勢擾乱が卓越している場合
は ⟨vt⟩ ∼ 0.5vt である。
読み出しノイズは、現在検討中の検出器の場合 0.125 秒 (8Hz) で読みだして、σe = 18e−
である。この効果は、星像内の光子分布が読み出しノイズによりふらついている場合の星
像中心決定精度への影響として評価され、星像 Window のピクセル数を nw = 25、光子
数を N = F t(光子流速を F 、撮像時間を t) として
Vreadout = 1 +
nw σe2
3ca N
とあらわされる。
星像中心推定において、0.003 pixel を超える推定は pixel ムラなどの影響を受けるた
√
め、光子数 N に対して 1/ N でスケールしなくなる。この効果は焦点距離 f と pixel サ
イズ w に対して
σp2
σwith centroid =
+
Fm t
(
2
0.003w
f
)2
と与えられるが、これを V で記述すれば
(
Vcentroid = 1 + N
0.003w
f σp
)2
∼ 1.51
とあらわされる。ここで σp は、centroid 処理をする前のすべての誤差を含むものであ
るべきである。すなわち、σp = σ1 Vopt Vatt であり、Vcentroid = 1.86 となる。しかし
ながら、オーダー評価を行う場合、σp ∼ σ1 は良い近似で、これを用いて計算しても
Vcentroid ∼ 2.1 程度である。
システム的な誤差には、熱的な像の伸び縮み、衛星の位置および速度の推定精度が含ま
れ、これは Vsys = 2 と決めている。
最終的に基準位置を合わせる必要があり、これは QSO を頼りに行われる。この効果は
未評価であり、現在
VQSO = 1.01
としている。
大フレーム同志を連結して位置天文パラメータを出す段階での推定誤差は非常に小
さく、
VLF2mission = 1
で良い。
parallax factor は、観測データから年周視差を求めるプロセスでの誤差である。他の
V は 1 より大きい値だが、parallax factor に関しては best effort で V = 2 である。この
量は、以下のように評価される。観測フェーズを θ で表わす。このとき、星の運動の年周
楕円成分は π sin θ のようになる。この運動から年周視差 π を求める精度は、π 2 sin2 θ の
積分である。今、一年を −π から π までで表わし、π および −π 付近は太陽がバルジ付近
162
第 14 章 基本仕様と共通課題
にいて観測できない領域であるとし、観測は 0 < θ0 < π である θ で −θ から θ の時期だ
け行われるとする。このとき、
1
Vparallax
∼
1
θ1 − θ0
∫
θ1
sin θ2 dθ.
θ0
である。分子は規格化定数である。θ0 = 135◦ ととれば、V = 1.65 である。
図 14.3 観測期間による parallax factor の依存性。バルジに太陽が来る冬期間を避
け、対照的にある期間観測した場合。図の縦軸は、Vparallax (1 + rs ) を表す。
熱変動などのシステム誤差により、5µas 程度の大フレーム領域の伸び縮みを許すとす
ると、これが誤差要因になりえる。年周視差を 10µas の精度で求めるなら、位置精度は
7µas であり、これに対して 5µas のシステム誤差を許容するとすれば
(
Vsystem =
7µas
5µas
)2
=2
となる。
大フレームを構築する際の連結誤差は、平均星密度 ρ = 10120 個、視野サイズを θc ×θs 、
視野移動の視野サイズに対する比率を rs , rc 、最大連結数を n とすれば、
2
VLF = 1 +
(n/2)
ρθs (1 − rs )θc (1 − rc )rs rd
となる。ただし、n2 に比例するという結果は、4 × 4 程度の視野の連結から外挿により評
価した結果である。別の評価を行うと n3 に比例する項があり (付録 C 章の手法での解析、
モデル化は付録 C.6.4 章)、n が大きくなればその項が leading term になる可能性がある。
14.3 誤差要因の列挙
図 14.4
163
大フレーム構築の視野結合による誤差 VLF の依存性。左は張り合わせ枚数の
依存性。現在は数値計算の結果に基づき枚数 n にたいして n2 の依存性を持つとしてい
るが、計算は n < 4 に限られる。他の評価からは n3 の項があることが示唆され、この
効果を入れるとさらに誤差が大きくなる (グラフ上)。右は、同じ視野の 20 倍の長さを
張り合わせるが、張り合わせのときの重ね合わせの比率を変化させた場合。たとえば測
光観測を併用する必要がある場合は、これを大きくする必要があるが、その場合、誤差
が増大する。
この V による表記は、必要観測時間に対して 1 次で効いてくる。したがって、何かの
要因で観測が不可能な時間が発生する場合、観測時間に対する全時間の比率を V として
あらわしておけば、他の V と一緒にこれらを掛け合わせることで、必要なミッション時
間を見積もることが可能である。
短期的に運用を停止する必要がある時間はない。
Vshort = 1
静定時間、読み出し時間の間は観測ができない。また QSO 観測に extra な時間を要す
る。これらの要因は観測可能時間に比べて十分大きく、足し算で効いてくるので、単純
に V の掛け合わせで表記することは適切ではない。そこで、静定時間と観測時間の比率
を rstat 、読み出し時間と観測時間の比率を rread 、QSO 観測時間と星観測時間の比率を
rQSO として、
1 + rstat + rread + rQSO
を乗ずると、最終的に観測に必要な年数が導かれる。
本章のこれまでの議論で検討された数値をもとに、各ステージでの誤差要因と推定精度
の推移と観測やその他の運用に必要な時間配分を、図 14.5 にまとめた。
V で表わされる推定に伴う誤差と、時間配分に伴う 1 + r はおよそ積で積算されてく
る。そこで、これらを log スケールで表示したのが図 14.6 である。1 + r が厳密に積で効
いてこないことの補正は、この図の中ですでに行われている。
この図の左端は、表 14.1 にある理想的ミッション時間であり、V や 1 + r で表わされ
る係数を積み重ねると、右端はほぼミッション期間の 5 年になっている。したがって、
グラフの全体の幅は log10 V ∼ 1.6 すなわち
∏
V ∼ 40 となる。さらに推定を重ねるた
めには、必要な V 値の積算が増大するため、このグラフで示されている領域の幅全体を
164
第 14 章 基本仕様と共通課題
図 14.5
各ステージでの誤差要因と推定精度と時間配分
広げる必要がある。これには、5 年のミッションの制約をはずすか、あるいは式 (3.1) で
表わされている基本仕様を決める要素を変更する必要がある。たとえば、検出器感度は
0.85µ ∼ 2.55µm まであるので、KW バンドをさらに広げることが一つのオプションとな
る。また、検出器数は 6 × 6 個を想定しているが、1◦ の焦点面には 48 個の検出器を並べ
ることができる (図 14.7)。
ここでは、関連ある誤差および時間配分係数を並べて記述している。parallax factor と
観測可能な季節は、関連する要素である。式 (3.1) で用いられている理想的な場合の必要
14.3 誤差要因の列挙
図 14.6
推定に伴う誤差要因と時間配分の積算。関連するものを並べて書いてある (詳
細は本文)。SF to LF は小フレームを張り合わせて大フレームを構築する際の連結誤
差、LF to survey area は大フレームを重ね合わせて位置天文パラメータを得る際の、
連結誤差の部分 (ここに列挙されている parallax factor と QSO 基準位置誤差を除く)
を記している。後者は未評価。
ϕ1◦ の焦点面に密に検出器を実装すると、48 個並べることができる。基本仕
様の 6 × 6 = 36 個に比べて、3 割たくさんの光子を集めることができる。
図 14.7
165
166
第 14 章 基本仕様と共通課題
観測時間 0.26 年は、この係数を考慮している。また、QSO 観測に割くべき時間も、この
方式をとる以上動かせない係数である。wave front error は鏡の制作制度にかかわるが、
現状の技術でベストを尽くせば、この項目の寄与は無視できる程度に収まることが分か
る。centroid 誤差は、検出器の非一様性などに依存する係数である。検出器が高価なた
め、実際に使用する検出器でこの係数は評価されていないが、アルゴリズムの改良や検出
器の適切なモデル化などによりここの部分を圧縮できれば、その効果は大きい。衛星の位
置・速度推定精度は、現状の技術で十分である。
読み出し時間を遅くすれば読み出しノイズを減らすことができる。そういう観点から、
読み出し時間と読み出しノイズを並べて表示してある。この組み合わせで最適解を得よう
と思うと、多少誤差が大きくても早く読みだした方が良いという結論が得られる。
姿勢擾乱・熱安定・静定時間の三つの係数は、バス系の中でのトレードオフとなる。こ
の三つの係数の積が最小になるような最適化をかける必要がある。
最後に、 “SF to LF”、すなわち小フレームを張り合わせて大フレームを構築する際
の連結誤差 VLF だが、現在は小フレームの熱安定をシステムに要請することによって、
VLF = 1.81 程度ならミッションが成立すると考えている。もし、長さの変動を推定する
アルゴリズムがあれば、熱安定を要求する必要がなくなり、その場合 Vsystem = 1 と考え
て良い。この図から、そういうアルゴリズムを作る考えるは、V < VLF × Vsystem = 3.35
なら成立する可能性があることが読み取れる。
14.4 データ転送量の検討
14.4.1 星像データ
現在、焦点面の星の周囲の 5 × 5pixel 程度の領域を「星像ウィンドー」として切り出し
転送する方法を考えている。CCD のデータは pixel あたり 16bits であり、星の数は焦点
面全体で約 1 万個程度なので、焦点面全体で必要なデータは 16 × 5 × 5 × 104 bit にウィー
ンドーの座標値を表す若干の付加データをつけたものとなる。これが、撮像時間は 2.3 秒
毎にでてくるので、およそ 2Mbps 程度となる。口径が大きくなると、撮像時間が D −2
で短くなるので、データレートはこれに応じて増大する。これに HK を付加することと
なる。
データ圧縮を行う場合、星像ウィンドーは、およそ 1/3 程度に、かつ低コストで圧縮可
能であると見込んでいる。
14.4.2 全データ
本来は、全データを取得したい。この場合、pixel あたり 16bit、焦点面上の総 pixel 数
は 6 × 6 × 2K × 2K となり、これを撮像時間ごとに吐き出す必要があるので、約 2Gbps
のデータ量となる。暗い領域が多いので、適切な圧縮を考慮すれば、10 倍程度の圧縮が可
能かもしれない (未検討)。しかしながら、焦点面全領域のデータを圧縮するには CPU パ
ワーも必要である。
この検討では、可視時間について考慮していない。衛星の可視時間割合が β であれば、
データ伝送速度に対する要求は、上の数値に対して 1/β 倍になる。
14.5 解析手法の考えかたに関する一考察
図 14.8 「面積」-「面積あたり観測時間」図上での JASMINE の解析パス。縦線右側
が 200 平方度の JASMINE 全ミッション領域、左側は 0.7 度四方の視野、左下隅が一
視野で 8 秒撮像に相当する。下の右上がりの線は小フレームから大フレームを作る際
に平均 4 回撮像することに相当、縦線の長さはミッション期間中に大フレーム 7000 枚
を集めることに相当する。
14.5 解析手法の考えかたに関する一考察
この章の記述は古い仕様に基づいて行われており、数値が若干本報告書の仕様と
異なるが、考え方は基本的に同じであるので、そのまま掲載する。この章の記述は
カラーの図 をもとにし て いるが 、白黒印刷のため記述が分かりにくくなっている。
http://www.jasmine-galaxy.org/pub/report3.pdf にこのレポート全体が掲載さ
れているので、参照されたい。
この附録では、上のような解析パスを探すための方法を考案したので紹介する。ただ
し、附録で示すものは 2 次元の両方向に同じ精度を持つ場合に、二次元のほぼ正方形の領
域を中間段階として採用した場合であり、上で示した一次元方向のみに感度があって帯状
領域を観測する場合とは異なっている。
14.5.1 手法の検討手順
下の図 14.8 は縦軸に観測時間を「秒/平方度」の単位で、横軸には観測領域の面積を
「平方度」の単位であらわした。このグラフ上の各点は、小フレーム、大フレーム、ミッ
ション領域などに相当する解析の単位を表わす。この中に、JASMINE で検討している解
析パスを示した。黄緑色は「空間時間法」、紫色は「時間空間法」である。左下の出発点
は、小フレームに対応する点で、望遠鏡の口径や視野など観測装置の制約から決まるもの
である。右上の点は、横軸はミッションでカバーする領域、縦軸はミッションに割くこと
のできる時間できまり、今は5年ミッションのおよそ半分強の 3 年が観測時間として割り
当て可能として点を打っている。このグラフの縦の間隔は、同じ領域を何回観測するかの
回数に相当する。ここに書かれているグラフでは、大フレーム構築時に 4 回ずつ同じ領域
を観測し、この大フレームを約 7000 枚重ね合わせるという仕様から、同じ領域を 30000
回観測していることが図上に示されている。したがって、図左下の観測精度と図右上の達
成精度は理想的な統計上は 170 倍程度向上するはずである。0.7mas の星像中心決定精度
167
168
第 14 章 基本仕様と共通課題
図 14.9
同じ図で、時間一定線は、勾配 1 の右下がりの線となる。
から、4 μ as が達成する計算となる。しかしながら、実際には理想的な値は叩きだせない
ので、解析の手法や推定可能性が問題となる。
このグラフの特性から、時間一定線は傾き−1の右下がりの直線となる。1 年、および
10 時間の線を図 14.9 中央付近右下がりの破線で示す。10 時間は、およそこれ以上の長時
間では、星が止まっているという近似が使えないため、星の運動も考慮した推定を行う必
要があるという目安である。
このグラフの中に、図 14.10 上のようにいくつかの線を引いてみる。この図のタイト
ルで、「誤差 30pm」は小フレームの長さの誤差が 30pm に抑えられている場合を、「推定
0.9nm」は大フレームでの長さなどのプレートパラメータの誤差を、推定を含めて 0.9nm
で抑えられることを意味している。
まず、長さ精度の要求値が一定となる線は、20 度領域で約 10µas という要求からきま
る。この要求は領域の長さに比例的に減少し、領域全体の長さに対して 1.4 × 10−10 倍で、
このグラフ上では縦の線として現れる。左に行くほど要求精度が高く、右が安全領域で、
たとえば 0.9nm(10µas に相当) の精度があれば後での解析が可能な領域は、この右側の
縦線の右側である。
ある領域内でシステム誤差が無視できるとした場合に、その領域を特定するパラメー
タ (たとえば小フレームの位置など) の推定精度 σ は、一つの星の星像中心決定精度 σc
√
と領域内の星の数 N に対して σ ∝ σc / N で表わされる。N は観測領域 A に比例し、
σc と一つの星の観測時間 t の平方根に逆比例する。ここで A は横軸、t は縦軸なので、
√
σ ∝ 1/ tA 一定の線は図上で右下がりの直線となる。上に行くほど、右に行くほど推定
精度は上がり、たとえば領域パラメータを 0.9nm で推定可能な領域は、の一点鎖線の右
上側である。
システム誤差 σ が系統的に悪化すると考えた場合、最悪値は時間及び空間のスケール
に対して線形の蓄積である。領域の長さ l と観測時間 t に対して σ ∝ lt となる。系の長
さl∝
√
√
A とすれば、σ 一定の線は t ∝ 1/ A の右下がりの直線となり、直線の上側に
行くほど誤差が大きい。例えば、視野サイズに対して 30pm/10h の誤差があるとすれば、
0.9nm のシステム誤差に抑えられるのは図の中央付近右下がりの実線の下側となる。し
かしながら、システム誤差のトレンド的変化は無視できて、統計的な平均だけが意味を持
√
つのであれば、同じ場所を多数回観測すると誤差は σ ∝ 1/ t で減少する。長さ方向に対
14.6 観測・解析手法、測光観測、問題点と帯法
しては相対比できまるから、σ ∝
√
A であろう。従って、誤差がランダムとみなせる場合
は誤差一定の線が図上で t ∝ A の右上がりの直線となり、上側は誤差が小さい。0.9nm
のシステム誤差が統計的に許容される範囲は、図の一点鎖線の上側となる (この図では右
下に少しだけ見えている)。
これに、星が動かない 10 時間以下という時間スケールを示す中央付近の右下がりの破
線の下、ミッション全体で同じ領域を 10 回程度撮像しなければ年周視差が求まらないと
いう条件を表わす図中の右上がりの実線のうち上の線の下側という条件を課せば、解析パ
スが通るべき点の候補が選択できる。
図 14.10 上を見る限り、30pm の精度で大フレームパラメータを 0.9nm の推定という
条件では、ぎりぎり大フレームの点が解析パスの通るべき点として許容されている。
システムの誤差として 1nm のオーダーになれば実現性が高まるとの意見があった。そ
こで、その場合の推定可能性を考慮するため、視野領域でのシステム精度は 1nm 程度だ
が、これを 70pm 程度まで推定する方法を検討する (図 14.10 中)。この場合、2 平方度、
10 時間程度のところに候補点があらわれる。すなわち、矩形の左下からたくさんの線の
交点を通過して矩形の右上に向かうような解析パスを通過すれば、目標が達成できる可能
性がある。ただし、問題は二点残る。一つは、領域があまりせますぎるので、貼り合わせ
誤差の蓄積や解析手法の特徴などの議論をより詳細化した時に、解が残るかどうかは不明
である点。もう一点は、この点で、図左下に少し見えている右下がりの実線と交点を通る
右上がりの一点鎖線は「or」で結ばれるが、一点鎖線の方を採用して良いか、すなわちシ
ステム誤差のトレンド的蓄積を無視して統計的に改善するという仮定を採用して良いか、
という点である。
もし、よりシステム誤差が抑えられる場合にどうなるかを見てみる (図 14.10 下)。この
場合は、中央付近にやや広い窓が開くので (図中で中央付近の三角形で示した領域)、議論
を詳細化した時にこの点が消える可能性は、前の場合に比べると少ないのではないかと期
待される。
以上、推定可能性を考慮したとしても、やはり視野あたり 1nm という値はぎりぎりの
ところであって、これで解があるかどうかは確かではない。ただし、多少でも改善されれ
ば、可能性が増大する。?
14.6 観測・解析手法、測光観測、問題点と帯法
図 14.11 は、静定時間と熱安定時間に対する制約をしるしたものである。現在の仕様で
は大フレーム構築時間の間熱安定することを要求している。実線は、現在の大フレーム
を用いる仕様で、5 年のミッション (上) および 7 年のミッション (下) の場合のせいやく
じょうけんである。静定時間を現在 8 秒としているが、これが伸びると、20mK で安定
を保たなければならない時間が長くなり、大フレーム構築にも時間を要することになり、
レーザー干渉計モニター装置の安定性に対する要求も厳しくなる。7 年のミッションが許
されれば、その条件は若干緩和される。
169
170
第 14 章 基本仕様と共通課題
図 14.10 ランダム誤差および要求値 (各線の詳細は本文参照)。矢印の方向が安全領
域、下中央および右の二つのうち一方を選ぶ。上は誤差 30pm、推定 0.9nm の場合、中
は誤差 1nm、推定 70pm の場合、下はシステム誤差 500pm、70pm の推定の場合。
図 14.12 Focal plane assembly for photometry observation
14.6 観測・解析手法、測光観測、問題点と帯法
図 14.11 静定時間と熱安定時間の制約
GAIA では、毎撮像毎に測光観測を行っている。測光観測を行うためには、その分検出
器スペースを割く必要がある。そのため、たとえば図 14.12 左のように検出器を配置すれ
ば視野の移動は 1/6 づつとなり、それだけ連結誤差の増大を生む。右のように配置した
場合は視野の移動は 1/3 づつで済むが、一方 astrometry に使用できる検出器は少なくな
る。左の場合は約 10 年が最低のミッション期間となり、右の場合でも 7 年程度でやっと
解があり、図 14.11 の一点鎖線のようになる。
この問題は、サーベイエリア全体を一度掃く間熱安定を要求することから起こる。も
し、この要求を緩和できれば、静定時間と熱安定性の要求を緩和することができる。
171
172
第 14 章 基本仕様と共通課題
図 14.13
strip method.
HIPPARCOS の球面構築に類似した方法として、他の観測手法を提案する。これは、
視野と同じ幅の帯状の領域を掃く間だけ熱安定を要求するものである。ミッション期間
中に撮像される ±30◦ 程度傾きの異なる複数の帯を結合して、球面構築のように位置天
文パラメータを導出する。静定時間の影響を最小化するため、この方法では現在 8 回と
している小フレーム構築中の露出回数をより大きなものにできる。そうすることにより、
帯に撮像されている星の星像中心推定精度が向上し、その結果帯同志の結合が容易に行
えるようになる。たとえば 40 回を採用すれば、帯での centoird 誤差は 130µas 程度とな
る。また、一次元方向のみのフレーム連結で済むため、誤差は連結数 n の
√
n 倍でしか
増えない。このようにして、精度良い一次元帯を構築することができる。帯同志の長さス
ケールの変化だけを考慮すればよい。小フレーム同志の傾きの違いは、帯方向の長さには
δl ∝ 1 − cos θ ∼ θ2 でしか効かないので、難しい小フレームの orientation の推定の誤差
の効果を最小に抑えられる。また、それ以外の長さスケールのちがいも、帯同志の重なっ
ている部分に 10000 ∼ 20000 個の星がそんざいするため、5µas/6◦ 程度で推定可能であ
る。7000 の帯を結合するばあい、ひとつの帯と複数の帯が複雑に絡み合っている。この
結果、詳細は省略するが、ミッションを構成する帯の長さスケールの年変化、および時間
線形の成分は、0.1µas/10◦ のオーダーとなり、全体に共通の長さスケールの変動のみが
残る。この部分は、大フレームを用いた方法と同様、QSO の年周視差と固有運動がゼロ
であることから固定できる。
14.6 観測・解析手法、測光観測、問題点と帯法
図 14.14 種々の方法の比較
HIPPARCOS で示された位置天文観測の解析は、
1. 第一段階と第二段階でプレート内の星の相対位置を正確に求める。
2. 第二段階で少し広い領域の星の瞬時の位置を、プレートパラメータとともに正確に
求める。
3. 第三段階で星の運動モデルのパラメータを異なる時刻のプレートパラメータととも
に求める
4. 最終的に座標系を ICRS などの基準座標系と照合する
という手順である。HIPPARCOS は大円という「同時座標」を構築し、これらを無矛盾
に結合することで全球の位置天文パラメータを決める。JASMINE では、「同時座標」は
「大フレーム」である。
「同時」とみなせるのは、星の運動が観測目標精度に比べて十分無視できることからき
まる。年周楕円運動では、これはおよそ
1
radianyr ∼ 20hours である。固有運動成分
400
についても同じ評価を行い、その小さいほうの制約から、「大フレーム」を構築する最大
(あるいは大円) の時間の制約が決まる。帯の方法は、この「同時」座標としてサーベイエ
リア全体を取るか、その一部を取るかの違いである。
173
175
第 15 章
データ解析と位置天文パラメータの
精度とバイアス
15.1 Malmquist バイアス
Malmquist[Malmquist, 1936] は、選択効果によるバイアスの存在について議論した。
天文学のデータにはかならず magnitude limit はあるので、 magnitude limited sample
を扱う場合に出てくるこのバイアスは重要である。距離によらず等級の平均値が一定で
あっても、観測限界があるために観測されたオブジェクトだけから単純な平均値をとれ
ば、遠方のオブジェクトがより明るく見える。図 15.1 に、その典型例を示す。
図 15.1 Malmquist bias。絶対等級は平均値が距離によらず σM = 3 の Gauß分布で
分布し、観測限界は m < ⟨M ⟩ + 5 である場合を示す。下の線は観測限界、上の誤差棒
は観測されたサンプルだけの単純平均値と分散。遠方に行くほど平均値が明るいほう
にずれていることが分かる。
176
第 15 章 データ解析と位置天文パラメータの精度とバイアス
図 15.2 20000 個の平均値 3.0 mas, 分散 1.0mas の π のデータを振り、これから
π > 0 のものだけを選択して距離 (pc) と絶対等級の分布を示した。絶対等級の計算に
は、実視等級 5 等、av = 0 を仮定した。π の平均値から期待されるそれぞれの値を破
線の縦棒で、データから計算される平均と分散 (1σ) を実線の十字でそれぞれ示した。
この分布は、本文中に示す数学的に得られる分布に良く一致する。
15.2 単純な変数変換によるバイアス
直接的には、視差の逆数を直接距離にして、Pogson の法則から PL 関係を求める。
Pont(1999)[Pont, 1999] は直接法の危険性を指摘しているが、これは変数変換を行なうと
ピークがずれるというバイアスである。
mV − MV = 5 log
1
− 5 + aV
π
(15.1)
し か し 、1/π か ら 距 離 を 求 め る こ と は 、σπ /π > 20% で は 極 度 に バ イ ア ス を 入 れ
る こ と に な る 。も し 視 差 の 分 布 が ガ ウ ス 分 布 だ と す る と 、視 差 の 逆 数 で あ る 距 離 、
そ こ か ら 求 め ら れ る mag の 分 布 は 非 対 称 で 、バ イ ア ス が 入 る (Luri and Arenou
1997[Luri and Arenou, 1997])。したがって、この方法では絶対等級にも大きなバイアス
が入る。
15.3 Lutz Kelker バイアス
177
• 最小二乗法が有効なのは、対称分布の場合である
• 視差がマイナスになる場合もあるので、σπ /π にカットを入れることになる。この
選択規則が、さらにバイアスを導入する。
モンテカルロ法からは、HIPPARCOS のデータからこの方法で求めたゼロ点は、0.2
mag のバイアスが入ることが予想される。(Pont(1999)[Pont, 1999])
実際にはピークのずれる方向とデータの平均値がずれる方向は、単純に重みを等しいと
して解析すると逆になる。というのは、ピークがずれる方向とは反対に大きく値がずれた
データが少数あって、それが平均値に影響を及ぼすからである。図 15.2 は、20000 個の
平均値 3.0 mas, 分散 1.0mas の π のデータを振り、これから π > 0 のものだけを選択し
て距離 (pc) と絶対等級の分布を表したものである。絶対等級の計算には、実視等級 5 等、
av = 0 を仮定した。π の平均値から期待されるそれぞれの値を破線で、重みはすべての
データに関して同じと仮定してデータから計算される平均と分散 (1σ) を十字で示した。
このことは、ガウス分布の解析的取扱からも理解できる。今、視差は平均値 π0 、分散
σπ の正規分布をすると仮定している。
f (π) = G (π, π0 , σπ )
(15.2)
上の図 15.2 の例に従えば、距離 r の分布 g(r) と等級 M の分布 h(M ) は
r = c1 /π (c1 = 1)
)
c1 ( c1
g(r) = 2 G
, π0 , σπ
r
r
5
M = c2 log π + c2 (c2 =
, c3 = −5)
ln 10
(
(
)
)2
M −c3
exp
−
π
0
c2
1
M − c3
h(M ) = √
exp
−
2
c
2σ
2Πσπ c2
2
π
(15.3)
(15.4)
(15.5)
(15.6)
となるはずで、これは Monte Carlo 計算と良く一致している。ここで注意すべきは、距
離の平均値は数学的には ⟨r⟩ = 1/ ⟨c1 /π⟩ に一致するはずなのだが、π が正規分布をする
場合、⟨1/π⟩ は数学的には不定である。π のカットオフをどこに与えるかでこの期待値
が決まるので、この期待値を議論することは意味が無い。等級については、式 (15.5) か
ら log π の期待値を計算することになるが、この値は log ⟨π⟩ にはならない。この例では
m/σ = 3.0 だから
⟨ln π⟩ = ln ⟨π⟩ − 0.001196 ln ⟨π⟩ − 0.067276
となる。これを等級で表すと、-0.15 等級程度のバイアスがはいることになるが、そのほ
とんどは変数変換に由来する。
15.3 Lutz Kelker バイアス
Lutz と Kelker[Lutz and Kelker, 1973] は、視差のデータによるバイアスの存在につい
て議論した。
今、 parallax が Gauß分布をするとする。すなわち真の parallax πtrue に対して、観
測される parallax πobs は
1
G (πobs , πtrue , σ)
g(πobs |πtrue ) = √
2Πσ
(15.7)
178
第 15 章 データ解析と位置天文パラメータの精度とバイアス
図 15.3 Lutz Kelker bias, σ/πobs = 0.05, 0.15, 0.25 の場合について、本文中の式
(15.8) に示される関数 G1 の値を示した。
と分布するとする。この時、観測された parallax から真の parallax の分布を評価した
い。星の分布が球対称である、すなわち
N (r)dr = 4Πr2 dr
であるとすると、これを parallax 空間で書けば
N (πtrue ) dπtrue =
4Π dπtrue
4
πtrue
となる。この時、式 (15.7) から逆に観測される parallax πobs が分かっている時の真の
parallax πobs の値の分布関数は
(
)4
(
)
πobs
(πobs − πtrue )2
exp −
πtrue
2σ 2
(
)
(Z − 1)2
1
∝ 4 exp −
Z
2(σ/πobs )2
= G1 (Z)
πtrue
Z=
πobs
g(πtrue |πobs ) ∝
(15.8)
と表される。すなわち、これは σ/πobs だけをパラメーターとする Z の関数として表され
て、図 15.3 のようになる。
ただし、この積分は発散するので、確率分布としては規格化不可能である。いま、Lutz
と Kelker は、これを絶対等級の評価に関するバイアスの存在を示すために利用した。こ
の場合も積分は発散するので、パラメーター ϵ を導入し、
⟨∆M (ϵ)⟩ =
5
∫∞
log ZG1 (Z)dZ
ϵ∫
∞
G1 (Z)dZ
ϵ
15.3 Lutz Kelker バイアス
179
σ/πobs
0.0
0.025
0.050
0.075
0.100
0.125
0.150
0.175
⟨∆M ⟩
0.0
-0.01
-0.02
-0.06
-0.11
-0.18
-0.28
-0.43
表 15.1 Lutz Kelker バイアスによる絶対等級の誤差を示す表。σ/πobs の値が 0.1 を
越えると、⟨∆M ⟩ の値の大きくなり方は急激であることが分かる。
図 15.4 2000 個の sinthetic data に対する分布。σπ = 1mas, 左上は距離の分布、右
上は誤差を与えた parallaxπ の分布、左下は 1/π の分布、右下は評価された絶対等級
の分布である。それぞれ、期待される値が破線の縦棒で、データから求めた平均と分散
は実線の十字で示してある。この図には、σπ = 1.0 および σm = 1.0 を採用した。
と置くと、この値が ϵ に対して安定するのは σ/πobs < 0.175 であり、これ以下のそれぞ
れの値について絶対等級のバイアスは表 15.1 のようであると結論している。
単純に、σπ を定数として生成されたデータと、それから計算したいくつかの量の分布
を図 15.4 に示す。理想的には、距離分布と 1/π の分布は同じにならなければならないが、
誤差を導入しているために分布に大きな偏りが見られる。等級の分布は、周期が対数正規
分布をするのでこのパラメータから分散 1.75 等の正規分布になることが期待される。実
線の曲線は、この分布を示している。これに、観測誤差 1 等級を与えて、分布を見ている
ことになる。しかし、我々はマゼラン星雲までの距離を 10% の誤差で決定したいと考え
ているのだから、等級を 0.2 等の精度で求める必要があることに注意したい。
181
第 16 章
各ステージごとの誤差
16.1 Stage1:星像中心決定
16.1.1 手法概要
星像中心決定
JASMINE の観測手法は観測領域の中のある場所に望遠鏡を向け、静止させ、2.24 秒の
撮像を 8 回連続行なう。その後、8 秒かけておよそ半視野ずらし、同様の撮像を繰り返す。
Stage1 では、観測領域内のある領域を望遠鏡で 8 回連続撮像した画像のなかの星像の
相対位置を正確に定める作業である。我々は重心法を用いて星像中心位置決定をおこなう
予定である。この方法は星像の中心まわり 5×5 ピクセルのサブセットをまずとりだす。
これは星像がおよそ 5 ピクセル程度にわたって広がるように設計されているからである。
この星像の広がりに対するピクセル数は大きくする程問題なく星像中心が求まるが観測視
野が小さくなる。一方、小さくすると十分な精度が得られない。また、サブセットのサイ
ズと星像の大きさはだいたい同じである方が誤差が小さく抑えられる。サブセット内で、
各ピクセルの中心をフォトン数で加重平均を取ったものをフォトン重心とよび、一般には
そのフォトン重心は星像中心とは異なった位置となる。原因は、サブセット内の有限領域
で重心を取っていることと、ピクセルの不連続性から来るものである。この重心法はフォ
トン重心と真の中心位置とのずれがピクセル中心からフォトン重心までの距離に比例する
と仮定して、星像中心位置を求める手法である。すなわち、真の中心位置 (xa , ya )、フォ
トン重心 (xc , yc ) として、
xa − xc = kxc ,
ya − yc = kyc
(16.1)
と表される。ここで、k は星の位置補正のための係数である。ここで表される k が求まれ
ば、フォトン重心から星像中心が求まる事になる。この k は、8 枚の画像中の星々の互い
の相対的位置関係が、撮像された十分短い時間では変化しないとして、最小 2 乗法を用い
て解かれる。
また画像歪みの補正に関しては隣接する小フレームの共通して撮像される星の位置情報
を用いて補正される。その際には隣接する画像が同じ歪みを受けていて、更に、先程と同
様、星々の互いの相対的位置関係は撮像された十分短い時間では変化しないとして、画像
歪みを解く。
以上の手続きにより、画像内の星の相対的位置関係を導き出す。
182
第 16 章 各ステージごとの誤差
16.1.2 誤差要因
望遠鏡性能
JASMINE 光学系が回折限界性能を満たすトレランスは、表 5.4 参照。
*GAIA: 参考資料 [project team et al., 2002] の 74–75 ページ参照。M2 の後にアクチュ
エーターを入れて調整している ([Safa, 2006] 参照)。
姿勢安定
姿勢安定度は、星像の理想的な像からの伸びが、縦横ともおよそ 1pixel 以内に収まるこ
とが要求値となる。
姿勢安定度 (後述する TDI 撮像を行なう場合は alignment を含む) は、姿勢擾乱により
星像が広がるため、検出器の露出時間に比べて短周期のものは V で評価できる。一方長
周期のものは、星像の形状や、星像中心位置の推定とあわせて推定することとなる。この
短周期姿勢擾乱に対応する VAttitude は式 (16.2) で評価できて、姿勢安定度が 1pixel 程度
におさまれば良い。振動上限の半幅の要求値 ∆x = 100mas(0.4 pixel 程度) にすれば、
(
VAttitude = 1 +
∆x
xPSF
)2
(16.2)
のように評価される。ここで、xPSF = 258mas は PSF の分散で、およそ 0.5λ/D とな
る。現在、焦点距離は PSF が pixel の数倍程度になるように決められている。
*GAIA: 姿 勢 ノ イ ズ の パ ワ ー ス ペ ク ト ル 分 布 は f > 0.05Hz で PSD <
(
)2
0.05
1000
(µarcsec)2 /Hz を 達 成 し た と し て い る [project team et al., 2002]。ま た 、
f
FEEP を使うことで 1µN の精度 [project team et al., 2002] で推力を発生し、姿勢制御精度
はスキャン垂直方向に 0.01arcsec/s(3σ)、スキャン方向に 1 arcsec/s(3σ) の精度で制御可能
としている [Perryman, 2004]。
R.O.N.
Readout noise によって星像がゆがみ、星像中心推定精度が下がる効果は、noise が統
計的性質を持つことから V で評価できる。この VR.O.N. は、星像 pixel 数を npixel = 25、
Readout noise 電子数を ne,ron 、係数 ca ∼ 0.5 は式 (14.1) の係数、蓄積される光子数を
Fma tint と書けば、式 (16.3) で評価できる。readout noise は 18e− は達成可能である。
(16.3)
VR.O.N. = 1 +
npixel n2e,ron
3ca Fma tint
(16.3)
npixel は星像に含まれる総 pixel 数、ne,ron は読みとりノイズ、ca = 0.5、Fma tint は観測
で得られる光子数である。
TDI を行わない KW -band 仕様の時、読み出し時間がデッドタイムとなるので、姿勢
制御など他の観測プログラム上の調整とうまく組み合わせる必要がある。しかし、現状で
は、撮像時間 1 枚 2.24s に対して、readout 時間が 0.125s であり、デッドタイムはそれほ
ど影響していない。
16.1 Stage1:星像中心決定
183
*GAIA:TDI 観測を行なっている。読みだしノイズに関しては、オンチップ binning などを
活用して読みだしレートを下げている。
CTI(charge transfer inefficiency)
CTI の増大は星像を劣化させるため、星像中心決定精度に影響を与える。CTI が劣化
した場合の PSF をモデル化して解く。これは、経年変化があるという困難さもあるが、
systematic なので解ける見込みである。
Nε
CTI 値を ε、転送方向の pixel 数を N = 2048 とすると、centroid が
程度伸びる。
2
*GAIA: ε ∼ 10−5 として 500µas 程度と評価している。また、CTI 値は運用初期で 10−5 程
度だが運用後期では 10−4 程度まで悪化すると予想している [Perryman et al., 2001]。ただ
し、この効果は推定可能な効果なので、データ解析で推定することとしている。
宇宙線
宇宙線イベントを適切に分離可能かが問題となる。hot spot の存在が星像中心の推定
にどう影響を与えるのか、宇宙線による検出器の劣化 (CTI の変化や感度ムラの発生) が
星像中心推定にどう影響を与えるのかなどの点である。短時間の間の複数の画像を撮像、
比較することにより、宇宙線イベントが撮像されている画像は除去するなどの対応方法が
あり、除去された画像があることで統計精度が落ちるが、問題はない。頻度、即ち統計的
に十分かについては、宇宙線の環境と係わることであり、軌道が決まった後に再度検討
する。
星像の取り出し
星像を取り出す際に、星像まわりにどの程度の大きさの領域を取り出せば良いのかが問
題である。星像に対して切り取る領域が狭いと星からの光を取りこぼす事になり不利であ
る。また、大きく切り取りすぎると星からの光がほとんど来ない周辺部においてノイズ
が卓越し、やはり誤差が増える。星像の大きさと同程度の領域を切り出す必要があるが、
JASMINE では、5 × 5pixel の領域を用いる事になっている。
*GAIA:星の等級に応じてかなり複雑な読み出しを検討していたが、現バージョンではかなり
簡略化された [Safa, 2006]。それでも、単純に読み出すわけではなく、等級に応じて on chip
binning の程度を変えて、readout noise との最適化を行なっている。
16.1.3 トレードオフ項目
星像中心決定手法
重心法と平行して、PSF 推定による方法を比較検討している。
現在、重心法では静止画像に対しては十分な精度が得られているが、TDI を使った場合
に十分な精度を達成するに至っていない。また、衛星姿勢安定が不十分な場合、望遠鏡の
歪みなどにより画像が大きくゆがむ場合などについて精度が得られない場合のため、より
184
第 16 章 各ステージごとの誤差
自由度の大きい PSF 推定を検討している。
姿勢安定性要求が達成されない場合の方針として、姿勢安定精度を向上する技術開発を
行う、短い撮像で多数回撮像を行う、望遠鏡口径を大きくする、ミッション期間を長くす
るなどのトレードオフを行う。
16.2 Stage2:大フレームの構築
この章の記述の中には、古い検討の内容が含まれており、現在の仕様と若干異なる数値
が使われている個所がある。しかし、検討結果そのものが大きく変わるものではなく、こ
の検討をベースに現在の仕様が定まってきたので、そのままここに掲載する。
16.2.1 手法概要
小フレームのモデル化
小フレームどうしを連結して大フレームを作成する際、小フレームで共通して撮像され
る星の相対位置関係からフレームの変形パラメータを推定することが可能である。しかし
ながら、全ての変形パラメータを推定すると、V 値が非常に大きくなってしまい、現実的
なミッションとならない。特に、画角のサイズに関連するパラメータは小フレームの基準
点推定と密に関連するため、この双方を精度良く推定することは難しい。そこで、画角サ
イズを変化させる要因を、装置の測定値から推定することが望ましい。
ここで問題となるのは、画角サイズの小フレーム構築時間より長く大フレーム構築時間
より短い時間スケールでの変動である。画角サイズの変動の要因としては、検出器のサイ
ズと望遠鏡の変形がある。さらに、変形には熱変形と構造変形がある。構造変形の要因と
しては、ホイールの擾乱は通常数 Hz 以上の高周波帯で、小フレーム撮像時間の 2.24 秒
より十分短周期になる。ハイゲインアンテナなどの可動部の擾乱は大きいが、現在の方法
では観測時には可動部を動かさないようにできるので、これらの擾乱の影響は観測精度に
影響しない。ソーラーパドルなどの柔構造は、衛星姿勢が大きく動くときには関係する
が、大フレームを構築する 10 時間の間の姿勢制御量は小さく、また構造の固有振動数を
適切に作成することにより問題となる周波数帯域の外に逃がすように設計することが可能
である見込みがついている。このような方法で構造変形の観測精度に対する影響は小さく
出来るので、ここでは望遠鏡と検出器の熱変形に着目したモデル化を行う。望遠鏡の変動
には、鏡間および鏡と焦点面の間の距離 (thickness)、中心位置のずれ (decenter)、傾き
(tilt) のパラメータがあるが、これらの量を直接測定することは出来ないので、望遠鏡の
測定可能な場所を測定し、thickness, decenter, tilt を可観測量にする必要がある。画像歪
には、このほかに検出器の伸び縮み、鏡の伸び縮みが関係する。
そこで、主鏡副鏡を支える 3 本の支柱間距離をそれぞれ L1 , L2 , L3 、検出器サイズが
x, y 方向にそれぞれ L4 , L5 、望遠鏡の鏡のサイズを L6 , L7 , L8 として、Lm , m = 1, . . . , 8
16.2 Stage2:大フレームの構築
185
の変化を dLm とし、画像変形を以下のようにモデル化する。
(
)
1 dL1
dL2
dL3
+
+
3 L1
L2
L3
dLm
=
− d0 , (m = 1, 2, 3)
Lm
dLm
=
, (m = 4, . . . , 8)
Lm
d0 =
dm
dm
(16.4)
(16.5)
(16.6)
において小フレームのサイズ、歪みは以下の式で補正する。
(
X = x + a0 + a1
1+
8
∑
fm1 dm
x + a2
)
(
fm4 dm
m=0
(
+a7
1+
8
∑
xy + a5
(
Y = y + b0 + b1
m=0
(
1+
8
∑
1+
8
∑
fm2 dm
8
∑
1+
gm1 dm
x + b2
y + a6
)
(
xy + b5
1+
x y + b8
8
∑
gm5 dm
m=0
1+
m=0
8
∑
m=0
1+
y + b3
y + b6
1+
)
gm8 dm
(
2
)
fm9 dm (16.7)
y3
1+
8
∑
)
gm3 dm
m=0
(
2
xy + b9
x3
fm6 dm
8
∑
8
∑
gm6 dm
1+
x3
)
gm9 dm
3
y(16.8)
m=0
こ こ で 、(x, y) は 検 出 器 上 で 測 定 さ れ た 座 標 、(X, Y ) は 標 準 座 標 で あ る 。ま た 、
ai , bi , fmi , gmi はパラメターである。
x および y については、一般には多項式展開されるが、この係数は高次に行くほど小
さくなる。これらの係数は厳密には望遠鏡に依存するが、JASMINE 光学系は歪みの少
ない設計となっている (distortion、即ち 3 次の係数で 0.02% 程度) ので、最大のズレは
1pixel 程度となっている。焦点面の大きさや光学系が異なるが、やはり最大の distortion
が 1pixel 程度となっている光学系での水沢における実験で、1/300pixel 程度の精度で星
像中心間距離を求めるためには x および y について 3 次の項まで取れば十分であること
を確かめている。展開次数については、今後数値シミュレーションや実験で検証する必要
があるが、より高次な項まで必要となった場合においても展開次数が上がりパラメータ数
は増えるが、モデル化の方針は変わらない。
また、今望遠鏡の観測量として 3 つの長さ Lm , m = 1, 2, 3 の変動 dLm をとっている
が、一般に先にあげた望遠鏡のパラメータは、tilt と decenter は 2 自由度ずつあるので合
計 5 自由度ある。光学系に影響しない光軸周りの回転自由度も含めると、二つの面の関
係を規定する自由度は 6 自由度である。今後、有限要素法などの構造計算や地上実験に
より、測定値から望遠鏡パラメータが的確に推定できているかどうかを検証する必要があ
るが、これを 3 つのパラメータから望遠鏡の構造を推定できる構造の候補を考えている
(16.2.2 章参照)。モニター箇所が増えることはシステムの構築を難しくする要因となるた
め、構造的工夫からできるだけ少ない点をモニターすることで実現可能なシステムを構築
するのが望ましいオプションであると考えているが、ヘキサポッド構造で 6 成分をモニ
ターする候補も残されている。
x2
)
m=0
8
∑
x2
)
m=0
(
)
fm3 dm
m=0
(
gm2 dm
8
∑
1+
)
m=0
(
2
8
∑
)
m=0
xy 2 + a9
fm8 dm
8
∑
1+
(
)
8
∑
1+
y + a3
2
fm5 dm
(
(
)
m=0
)
gm7 dm
)
m=0
(
)
gm4 dm
m=0
(
+b7
1+
8
∑
8
∑
m=0
x2 y + a8
fm7 dm
1+
1+
)
m=0
+b4
(
m=0
(
+a4
1+
)
8
∑
186
第 16 章 各ステージごとの誤差
図 16.1 連結精度と画角サイズの関係
さらに、鏡自体の熱変形による小フレーム毎のサイズや歪みの変動を考える。鏡の熱
変形に関しては、zernike 多項式の曲率成分を除く各成分が 10pm の精度で抑えられてい
る必要があるが、例えば SiC を用いた場合、温度にして 0.1mK の温度むらに相当する。
50K 程度の熱環境におくことで数値計算上、この範囲内の温度むらに抑えられる見込み
が立っている (仕様書案の 16.2.2 参照)。しかし、曲率成分を抑えるためには温度変動を
0.1mK 以内に抑える必要があり、これは困難な見通しである。したがって、曲率成分は
鏡の口径変動をモニターすることにより推測する。
20 度 ×10 度四方内の小フレームの連結
バルジ観測領域の 2 次元連結誤差は連結の枚数や観測する領域の星の数に依る。シミュ
レーションによると誤差は連結の枚数に比例して増大し、隣接する 2 枚のフレームの共有
部分の星の数の平方根に反比例して減少する。図 16.1 に画角サイズに対する必要な個数
密度のグラフを示す。
図より 1 × 104 程度の個数密度があれば 20°以下の範囲で2次元的連結が可能となる。
なお、連結のために用いる星は 1 枚の小フレームの積分時間という短期的スケールで止
まっていれば良いので連星であってもかまわないし、暗い星を含めて連結を施せば良い。
図は K=12 等までの星の個数密度を表しており、この等級まで連結に用いれば、必要個
数が達成されている事が分かる。ただし、ここで、連結の精度は厳密には星の個数ではな
く、フォトン数に依るので、基準等級である K=11 等より暗い星の個数に関しては、同じ
フォトン数となる K=11 等の星の個数に換算しており、実際の星の個数とは異なる。こ
の換算された個数を”Effective”という用語で表すとする。図 16.2、図 16.3 に K=12 等
(Effective) の個数分布を示す。観測領域のほとんど全ての領域で 1 × 104 以上の個数密度
16.2 Stage2:大フレームの構築
図 16.2 観測領域における星の個数密度分布
図 16.3 観測領域における星の個数密度分布 (対数マップ)
が達成されている。
16.2.2 誤差要因
星の個数
JASMINE では、瞬時瞬時の位置およびその変化を解析するために、空間的・時間的に
限られた視野を重ね合わせて解析する。この時、星像中心の位置推定精度は、異なる視野
同士の原点 (あるいは検出器上の位置を天球上の位置に結びつけるためのパラメータ) の
推定精度と視野内での位置推定精度の両方に関わってくる。原点の推定精度が悪ければ、
星の位置推定精度は一つの星の観測で得られる光子の数から期待される理想的統計精度に
比べて悪くなる。銀河系バルジ付近程度の星の密度の場合は、視野のゆがみと伸び縮みが
変化しないあるいはモニターされている場合は、理想統計誤差と実際に達成される誤差
の σ 2 の比率は約 2 程度となる。なお、システムの構造や熱に対する critical な要求をせ
ず、望遠鏡の変形による視野ゆがみやのび縮みの変化を許容して星の位置を推定する場合
は、比率が大きくなり、口径やミッション時間などが非現実的なものとなってしまう。そ
こで、推定精度を向上させるため、適切なモデル化により推定できる方策を考えたい。ひ
187
188
第 16 章 各ステージごとの誤差
ずみを目標精度に抑えることは困難なため、望遠鏡や検出器の伸び縮みの要因をモデル化
し、これらの要因となる部分を適切に高精度にモニターすることにより、画角のサイズや
ゆがみの変動を推定し、この推定値を用いて張り合わせ精度を向上させる。このモデル化
の妥当性は、地上実験や冗長モニターによる軌道上測定などによって、保証される方法を
考慮している。
現仕様では、星が動かない、あるいは決まった運動をすることを仮定して、視野を張り
合わせて全体の精度を出すこととしている。この場合、視野の張りあわせが精度良く行え
るかどうかがミッションの成立性を左右する。
張り合わせ精度は、張り合わせ前後のパラメータの選択に強く依存するが、視野の歪み
がないと仮定できる場合は、視野の原点と向きのみがパラメータとなる。この場合、バル
ジ付近での平均的な星の密度を考慮すれば現実的に張り合わせによる解があるが、小フ
レームの歪みや伸び縮みをパラメータ化する場合、これらのパラメータが視野原点と縮退
してうまく分離できないため、ミッション成立性を著しく低くする。従って、画角の変化
や小フレームの歪みを熱管理などにより十分低く維持することが、ミッションの成立に
とって欠かせない要件となる。
望遠鏡熱変動のモデル化とモニター
大フレームを構築する際、小フレームの画角サイズや歪みの変動が系統誤差として残る
ことを指摘した。この変動を起こす要因は、主に検出器の伸び縮みと望遠鏡の熱変形であ
る。検出器の伸び縮みは直接的に測定できるが、望遠鏡の変形による焦点面画像の歪みは
直接測定できないので、小フレームのモデル化が必要となることを 16.2.1 章で見た。
本章では、まず光学系の歪みの許容値を thickness, tilt, decenter と呼ばれる光学系が
持つ基本量で議論し、次に想定される熱環境から予想される変動値を示し、その後にこれ
ら基本量の測定方法について考察する。
まず、光学系の変形は、鏡あるいは焦点面の面の配置の変化で表現される。これは、面
の位置を表す 1 成分の thickness と、面の傾きを表す tilt 及び面の光軸中心からのズレを
表す decenter が各 2 成分、合計三種類 5 成分の量である。JASMINE 光学系は 3 枚鏡系
と呼ばれるもので、主鏡、第一副鏡、第二副鏡、焦点面の四つの「面」を持つ。これら四
つ面について、それぞれこれら 5 成分の量が定義される。面の配置を表す成分は一般に 6
成分あるが、軸周りの回転は光学系に影響を与えないので、光学系に影響する量としては
これら 5 成分で良い。
これらの基本量が画像の歪みにどう影響するかは、光学系を決めれば厳密にきまるもの
である。
観測領域の端で 10µas のずれに抑えるためには、これら基本量の許容変動量は表 16.1
のとおりとなる。実際には、この精度で動かないように作ってもよいし、この精度で制御
してもよいし、この精度で測定されていればその測定値から画像のズレを補正可能であ
る。しかし、動かないように作るとか、制御することは非常に困難であると見込まれ、測
定による補正を考えることが先ずは正攻法であると考える。
先ず、thickness 等の量がどの程度変動するかを見るため、図 16.4 に示すモデルによっ
て熱変動を計算してみる。
JASMINE では、検出器の温度は 170K 程度が適切である。望遠鏡が同じ熱管理シス
テムの下にあると仮定すると、放射冷却でこの温度を維持するためには、支柱への熱入力
16.2 Stage2:大フレームの構築
189
Thickness
Decenter
Tilt
主鏡
77pm
210pm
28pm
副鏡 1
34pm
530pm
52pm
副鏡 2
56pm
340pm
45pm
焦点面
500pm
10000pm
830pm
※焦点面拡大縮小 10pm
※鏡の口径の拡大縮小 10pm
表 16.1
図 16.4
光学系変動許容値
望遠鏡主鏡副鏡と支柱
密度
熱容量
3
3200kg/m
730J/kgK
熱伝導率
198W/mK
熱膨張率
2.4 × 10−6 /K
表 16.2 SiC の物性値
は 0.237[W] になるよう管理されていることになる。大フレームを作成する時間スケール
16h の間で、この熱入力値がノミナル値に対して 10% 程度の変動があるとすれば、支柱
1の熱入力の変動成分は、
Fin = 0.024 sin(2πt/ts )[W]
となる。ここで、ts = 16hours にとった。支柱の物性値として例えば表 16.2 に示す SiC
の物性値をとり、鏡が熱的に影響しない場合を仮定すれば、各支柱の平均温度の時間変化
は図 16.5 左で表され、これを支柱の長さに換算すると同図右となる。長さそのものの変
化は thickness に、長さの差は tilt と decenter として効く。
190
第 16 章 各ステージごとの誤差
図 16.5 各支柱の平均温度の時間変化
図 16.6 tilt を抑える構造
上のモデルでは、支柱の長さが観測されていることになる。このモデル化の範囲では、
本来面の変動は 6 成分あるのに 3 成分しか観測しておらず、観測値から基本量を導くこと
は出来ない。すなわち基本量は可観測量になっていない。この解決方法としては、直接 6
成分を観測して基本量を導く方法もあるが、モニター装置を多数つけることは、システム
構造を複雑にして望ましくない。
そこで、構造を工夫することにより変動を制限し、3 成分の観測で基本量を可観測量に
近づける可能性を考察する。表 16.1 から、tilt に比べて decenter の要求値は一桁低いた
め、tilt を起こしにくい図 16.6 のような構造を考える。これに基づいて計算したのが図
16.7 である。この構造は、支柱が均一に膨張すれば原理的に tilt はゼロであるはずだが、
実際に変形は tilt 成分が decenter 成分の 1/20 程度まで減少している。
ただ、この 1/20 という係数は熱入力変動に依存性はあるものの、図 16.7 を見ればは
tilt と decenter の相関は非常に良く、今後詳細な熱構造シミュレーション行なって行くこ
とで、tilt と decenter が十分良い可観測量になるものと見込まれるので、3 成分の測定か
ら tilt および decenter を推定でき、これから光学系焦点面での像の歪みを推定できる。
16.2 Stage2:大フレームの構築
図 16.7
図 16.6 による tilt と decenter の変動
図 16.8 図 16.6 による温度変動
これらの変動を抑える手法として、熱入力の不定性を低く抑える方法と、鏡のノミナル
温度を低く抑える方法の二つが考えられる。10% 与えていた熱変動を3 % の熱変動に抑
え、光学系ノミナル温度も 170K から 100K にできれば、図 16.5 右は図 16.8 のようにな
り、20 倍程度変動をおさえることができる。
そこで、本章では熱解析を行い、望遠鏡光学系配置の熱変動に対する対策の候補を示す。
なお、望遠鏡を構成する鏡自身の歪みも当然光学系変動となるが、素材を適切に選択して
温度管理を行うなどの方法で、鏡自身の歪みは十分な精度で抑えられる見込みである。鏡
の熱変形に対する影響に関しては zernike 多項式の各成分が 10pm の精度で抑えられる必
要があるが、例えば SiC を用いた場合、温度にして 0.1mK の温度むらに相当する。50K
191
192
第 16 章 各ステージごとの誤差
図 16.9 主鏡面温度分布
程度の熱環境におく事で数値計算上、この範囲内の温度むらに抑えられる見込みが立って
いる (図 16.9 の数値計算結果参照)。配置の誤差の問題との違いは、鏡面素材については
低膨張素材の研究が進んでおり、支柱に比べると鏡面の素材の方が選択の自由度が大きい
ことである。これについては、複数の素材の候補を挙げて、今後シミュレーションを行っ
てゆく。
*GAIA: 参考資料 [project team et al., 2002] の 74–75 ページ参照。
その他の熱変動
16.2.1 章参照。
16.2 Stage2:大フレームの構築
モニター装置の誤差
図 16.10 開発予定のモニター装置
望遠鏡の変形のよる視野の歪みや伸び縮みは、星の位置推定に悪影響を与える。そのた
め、モニター装置によって望遠鏡の変形をモニターする必要がある。どの部分をどの程度
の精度でモニターすれば良いかは、構造や熱設計と絡んだ詳細なものは現在光学系シミュ
レーションで検討中であるが、見込みは付けられている。さらに、その精度が開発するモ
ニター装置で実現可能かは、今後モニター装置の誤差をどこまで低くできるかの検討にか
かっている。モニター装置の開発は、現在順調に行なわれている。
最終的に 10 μ秒角の位置天文精度を出すためには、小フレームの拡大・縮小や歪みの
変動成分を必要な精度でモニターすることが非常に重要な課題である。我々の解析によれ
ば、主鏡と副鏡間等の長さ変動、鏡の口径変動と焦点面上での検出器に対する長さ変動を
約 10pm の精度でモニターする必要がある。このような高精度でモニターできる装置と
しては、レーザー干渉計を用いたものが有力候補である。開発すべき技術要素としては
• CCD 検出器や鏡のサイズ変動を測定する「レーザー歪み計」
• 望遠鏡の姿勢や距離をモニターする「望遠鏡ジオメトリモニター」
• これらの測定を高精度で行うことを可能にする周波数安定化レーザー
が必要となる(図 16.10 参照)。最終的には JASMINE の要求精度を実現するための地上
実証機を開発し、そこへ各要素を組み込んでいく。
ここであげた各項目は、周波数標準の研究やレーザー干渉計型重力波検出器の開発と
いった分野で既に実績のある技術を応用しており、原理的には JASMINE で要求される
精度を満たすものである。実際、従来の JASMINE でビーム混合鏡角を 10 μ秒角以内の
精度で計測するために開発を行ってきたレーザー干渉計型ベーシックアングルモニタで
も、同様のレーザー周波数安定化技術、干渉波面位相差の検出技術を用いて来た。新しい
バージョンの干渉計型モニターはそれらの基礎技術を延長することで実現できるもので
ある。
193
194
第 16 章 各ステージごとの誤差
しかしながら、JASMINE に特化した部分については、独自の研究開発を進めなければ
ならない。これまでに確認されている干渉計の性能・レーザー安定度の性能は、JASMINE
の大フレーム観測時間スケール (16 時間) という長時間では要求精度に達していない。ま
た、JASMINE の観測スキーム中で「知りたい」情報は、具体的にどのような装置方式を
とることで得られるのか、という点についても実際に実験をして示していく必要がある。
図 16.11
開発予定のモニター装置
本年度はとくに「望遠鏡ジオメトリモニター」の実証実験を行う。これは望遠鏡のよう
な大構造物に干渉計モニターを取り付け、その位置や姿勢の変動を実際的なセットアップ
で実証することを目的とする実験である。同様の光学系安定化システムは NASA で計画
されている JWST 衛星の地上試験、もしくは TPF-C 衛星の機上での副鏡安定化などで
検討されているが、装置方式についてはまだ確定しておらず、やはり我々独自の研究が必
要となる項目である。
具体的には、望遠鏡を模した 2 枚の鏡板の向かい合う 3 点の距離をレーザーで測定し、
2 枚の鏡板の相対位置・姿勢変動を知るというものである(図 16.11 参照)。測距方法と
しては、非対称マイケルソン干渉計を用いる。鏡板の片方はピエゾアクチュエータで支持
し、これを駆動して人工的にジオメトリを変動させ、その変動が測定できていることを
実証する。レーザー光源としてはこれまでのモニター開発で使用してきた Nd:YAG レー
ザーをそのまま利用するため、レーザー周波数安定化システムはそのまま流用できるが、
JASMINE の要求レベルを満たす安定度は得られず、その点は次年度以降の開発にゆだね
られる。 次年度以降は、小フレーム観測の時間スケールである 12 秒から 16 時間の間で 10−11
の周波数安定度 d ν/ν (波長安定度 d λ/λ) を持つレーザーとして、アセチレンまたは
ヨウ素のガス吸収線で安定化したレーザーの検討・開発を行う。また、この安定化レー
ザーによる CCD 検出器の歪みモニタのー適用を検出器開発グループと共同で行う計画で
ある。
*GAIA: [Perryman, 2004] および、[van Veggel et al., 2004] 参照。
16.2 Stage2:大フレームの構築
195
光行差
10µas を達成するために、衛星の移動に伴う見かけの位置の変動の誤差をその 10% 程
度に抑えるとすると、光行差を 1µas 程度にする必要がある。光速度が約 3 × 108 m/s で
あることから、衛星の速度を 1.5mm/s で推定する必要がある。
*GAIA: 同様。数年以内に 0.1mm/sec より良い精度が現実のものとなると書かれている
[Perryman et al., 2001]。
衛星の位置
衛星の位置の変化に伴う星の見かけの位置の変化が知られている必要がある。誤差を
10µas に対して 10% という制約を課すと、位置決定精度に対する要求値はおよそ 150km
となる。これは、後から軌道解析で分かればよく、リアルタイムで分かっている必要はな
い。既存の衛星では 1km 程度の位置決定精度があるので、十分達成している。
16.2.3 トレードオフ項目
光学系のオプション
現在主に検討している光学系は、3 枚鏡*1 の軸対称光学系である。このほかに、軸はず
し三枚鏡系および軸対称二枚鏡系を検討している。
■軸対称三枚鏡系 この光学系は、単純で PSF が全視野に渡ってきれいであるメリット
がある反面、副鏡と光路折り曲げ鏡が視野をさえぎるため、有効視野サイズに限界があ
り、また encircled energy fraction が小さくなるデメリットがある。
■軸はずし三枚鏡系
この光学系は軸対称光学系に比べて焦点面を大きくすることが出
来、encircled energy fraction も大きくすることが出来、より効率が良い観測が可能とな
るメリットがある。しかしながら、制作上の困難などについて、更に検討が必要となる。
■軸対称二枚鏡系
リッチークレチアンと呼ばれる 2 枚鏡の方式で光学系を組むことを
検討している。この方式の望遠鏡は多数製作されており、鏡面研磨などの点では実績があ
り、大型地上望遠鏡などでも採用されている方式である。PSF 形状は 3 枚鏡系に比べて
悪いが、この点が問題になるレベルかどうか検討中である。
また、像面は R = 800mm 程度の湾曲を持っている。ここに検出器を配置できるかは
新規開発事項となる。
*1
実際には光路折り曲げの平面鏡を含み、7 枚の鏡を使う。望遠鏡の分野では、鏡の枚数は曲率を持った鏡
の枚数のことを言う。
196
第 16 章 各ステージごとの誤差
望遠鏡素材
CVD
SiC
C/SiC
3.1
3.21
2.55
1.5
1200
400
−
150
800
400
410
466
238
高
強
度 RS密
度
SiC
3.1
常圧焼
結 SiC
CFRP Glass
ZPF
ULE
2.53
2.54
2.21
80
240
ρ(MG/m3 )
曲 げ 強 度
(MPa)
ヤ ン グ 率
67
(GPa)
弾性係数 E
120
90
150
(GPa)
破 壊 靱 性
3.3
3.0
3.4
6.5
(MPa · m1/2 )
硬さ (Hv)
熱伝導率 Λ
(W/m · K)
2000
130
2200
65
250
130
50
1.6
5.3
1.31
6.8
7.1
7.33
7.00
−
8.2
8.0
7.66
3.9(※ 1)
3.9(※ 1)
2.2
1.5−2.2
0.03
0.02
0.02
0.03
比
熱
(102 J/kg · K)
熱膨張係数 α
(10−6 /K)
4.3(※ 2) 4.6(※ 2)
roughness rms
1
4
(nm)
Stiffness/mass
80
35
60
(E/ρ)
Thermal sta1700
80
260
bility (Λ/α)
※ 1:室温 ∼1073K
※ 2:室温 ∼1473K
CMC:Ceramic Material Composite, Glass(Zerodur), ZPF(Zero-expansion Pore
Free ceramics
表 16.3 鏡素材候補の物性値。[Iye, 2006, 須山章子 et al., 2003]
現在、望遠鏡素材として ASTRO-F に用いられた SiC 系の新しい素材である東芝の高
強度反応焼結型 SiC、Solar-B で用いられている低膨張ガラス素材 ULE、次世代地上大型
望遠鏡や NASA の TOPS で検討されているゼロ膨張セラミックの ZPF を検討している。
従来 JASMINE は、1.5m という大口径でかつビーム混合鏡を持ち、L2 点ミッション
を検討していたため、軽量鏡素材である SiC が必須であると考えていたが、小型化の検討
においてはガラス素材の可能性も考えられる。
ZPF は素材の配合によって最適温度が変えられるが、低温側で −30◦ 程度が限界とさ
れ、検出器の最適温度と異なるため、検出器と鏡とが独立の温度で適切な温度管理が可能
であることが条件となる。
素材の選択には、熱膨張率が小さいことは重要だが、熱伝導率・熱容量が大きいことも
16.2 Stage2:大フレームの構築
重要である。構体とあわせた総合的な検討が必要である。
TDI 観測
GAIA では、TDI(Time delayed integration) と呼ばれる CCD の駆動モードを用いて
いる。このモードは、電荷の移動速度を衛星の自転周期に同期化させることにより、観測
を行いながら読み出しを行うことが出来る。このため、読み出し時間がデッドタイムとな
らず、観測デューティーを向上させている。
TDI 撮像が可能なのは、視野が一つの場合、および複数の視野があるときに焦点面上で
の像の流れる方向が同一の場合に限られる。ビーム混合鏡を用いる場合、どういった領域
をどの方向で撮像するかによっては、TDI が使用できない場合がある。
また、本ドキュメントに提示した視野座標 (衛星姿勢) 推定は、得られた像のみから行
うことを仮定しているが、HIPPARCOS の場合はこの推定精度が不足しており、像から
推定された衛星姿勢を衛星運動モデルを用いて補正している。このような補正が必要な場
合は、衛星の制御無しに連続する視野を撮像する必要があり、この場合、TDI は必須要件
となる。
一方、TDI 観測を行う場合は、姿勢の安定度要求だけでなく、検出器軸と衛星軸の
alignment 要求が加わることとなり、システム的な困難を増大させる。
なお、TDI を行う場合は、
「小フレーム」の概念は仮想的なものになる。HIPPARCOS
の場合は、視野に入っている星のひとつが視野から出て行って新しい星が入ってくる (ほ
ぼ等間隔に星が分布していれば、この二つの事象はほぼ同時に起こる) タイミングで仮想
的な「小フレーム」をとっている。TDI 観測の場合、およそ CCD 一つ分のデータを読み
出すタイミングが仮想的な「小フレーム」と考えられる。現仕様では、CCD が横に 8 つ
並べられるので、
「小フレーム」はここに書いた視野を 50% ずらしたものではなく、12%
ずらしたものとなる。
TDI モードを用いる場合と用いない場合での運用上の制約は、以下のようになる。
■TDI を用いる場合
姿勢安定度要求に加えて、検出器軸と星像が流れる方向の align-
ment 要求が発生する。要求精度は姿勢安定度要求と同程度となる。
■TDI を用いない場合
読みだし時間が全てデッドタイムになるため、観測 duty が下が
る。もちろん、TDI を用いない場合は露出時間と読みだし時間とは関係が無いので、ゆっ
くり読み出すことによる read out noise 低減のメリットと観測デューティー減少のデメ
リットがトレードオフされる必要がある。また、読み出し中に露光してはいけないので、
TDI を用いない観測を考える場合はシャッター機構を装備する必要がある。メリットと
しては、alignment 要求が緩和されること、また読みだし時間を衛星の姿勢制御などに使
うこととすれば、観測時に姿勢制御やアンテナ指向変更などに伴う擾乱を与えること無く
観測することが出来る可能性がある点である。
衛星姿勢
姿勢制御系は、ある程度長時間安定していることと、0.3°程度視野を振った後に十分
早く緩和することの二点がある。
前者の要求について、要求値は 49.5mas/12 秒と現在の SolarB の達成値 100mas/10
秒より数倍厳しい値となっている。ただ、対処方法として、より短時間の複数撮像を繰り
197
198
第 16 章 各ステージごとの誤差
返す方法がある。この方法では、シグナルが減少するために S/N 比が悪くなるが、例え
ば現在の 12 秒撮像を二回繰り返す方式から約 5 秒撮像を 5 回繰り返す方式にした場合、
49.5mas/4.84 秒となり、姿勢制御へのシステム要求は緩和される。なお、この方法での
S/N 比の劣化については、ミッション時間を約 2 割のばすか望遠鏡口径を 80cm にする
ことで対応可能であり、今後のトレードオフ事項となる。
さて、姿勢制御系の要求としては、ある程度の長時間安定性以外に、できるだけ短時間
で安定状態に緩和して欲しいという要求がある。VSOP2 のような柔構造をもったもので
も 2 秒以内で 1 秒角/15 秒 (VSOP2 の安定度要求の約 1/20) 以内まで緩和しているので、
VSPO2 同様の CMG 搭載を考えればこれは大きな要因とはならないと思われる。しか
し、安定度要求は VSPO2 では 20 秒角程度、シミュレーションによる予測値が 1 秒角/15
秒程度に対し、JASMINE の場合は 50mas/(数秒から 20 秒程度) と、要求値自身が厳し
いので、姿勢制御系と構造を考察する際には安定度自身の他に緩和時間は重要なファク
ターとなる。今後、構造計算と練成した計算で詰めてゆく必要がある。
姿勢制御の併用
図 16.12 衛星姿勢制御により、太陽輻射による外部熱入力を一定化するための方法。
遮蔽板の形状モデル (上)、および記号の説明 (下)。
衛星の遮蔽板の形状は、実際には 16.12 図上左 (赤矢印は観測方向) のようなものにな
ると思われる。望遠鏡の側面と底面が太陽方向を向く可能性があるので、ここからの熱入
力を抑えることが、遮蔽板の役割である。ここでは原理を理解するために計算を簡略化す
ることを考え、上図中の 遮蔽板の形状をさらに円形にした図 16.12 上右のモデルを考え
る。こうすることにより、遮蔽板と太陽指向のパラメータを一つにすることができるが、
それ以外の形状でも、二枚の遮蔽板の面積や太陽指向を表す角度パラメータを二つ用いる
などの改善の必要は生じるが、原理的に同じ制御が可能である。ここでは、唯一のパラ
メータとして、望遠鏡指向と遮蔽板の相対角度 α を用いた議論を行う。
図 16.12 下左は円形遮蔽板を真横から見た図、これを衛星軸に近い方向から見た図を図
16.12 下右に示す。この簡単化を受け入れると、遮蔽板が太陽を見込む面積は、観測指向
方向と太陽の方向の相対角度 θ と、この二つの指向を決める面からの望遠鏡のロール角
ϕ を用いて sin(θ − α) cos ϕ に比例した変化をする。この式が一定となるように ϕ を調整
すれば、遮蔽板はいつでも太陽方位角一定の姿勢を保て、熱入力は安定する。この安定度
16.3 Stage3:大フレームの結合
は、ϕ の制御精度できまる。
この量を一定に保とうと思うと、θ の変化する範囲に sin(θ − α) がゼロになるところが
あると、解を探すことができない。 θ = 180◦ はあり得る条件だが、 α ̸= 0 としておけば
θ − α は 0 や π にならない自由度が残る。θ > 45◦ が現在のノミナル観測領域だから、観
測指向方向が太陽にもっとも近い場合と太陽の反対側を向いたときとで同じ程度の θ − α
の値をとるようにすれば、遮蔽板のサイズを最も小さくできる。すなわち、α はノミナル
観測領域と太陽の最少角度の半分、22.5◦ 程度が最適となる。
問題点は、この条件では望遠鏡の高さの 5.2 倍 (= 2/ sin 22.5◦ ) 以上のサイズの遮蔽板
が必要となり、遮蔽板が大きくなりすぎる点である。しかしながら、たとえば大フレーム
構築時の 20 度程度の首ふり時の安定性だけを考えるなら、小さなシールドで対応可能な
パラメータを算出することは可能である。
16.3 Stage3:大フレームの結合
この章の記述の中には、古い検討の内容が含まれており、現在の仕様と若干異なる数値
が使われている個所がある。しかし、検討結果そのものが大きく変わるものではなく、こ
の検討をベースに現在の仕様が定まってきたので、そのままここに掲載する。
16.3.1 手法概要
これまでの段階で、大フレーム内の座標系は十分精度良く張られており、この上での星
像中心間距離は十分精度良く求められている。次の段階は、これらの大フレームを時間的
に結合して、位置天文パラメータを求める操作である。
ここまでの段階で解かれていない各大フレームの座標系の自由度は、「原点の位置」「座
標系の方向」「スケール」である。これらを時間的に張り合わせ、単一星においてはその
運動が 5 つの位置天文パラメータで記述できることを仮定し、星の運動と座標系の自由度
を同時に解くことで、年周視差を導出することが出来る。
一般に、narrow field では field 内での年周楕円運動はほぼ同一であるため、絶対年周視
差が求まらないと言われている。そのため、HIPPARCOS や GAIA では大角度離れた領
域にある異なる位相で年周楕円運動をする星を同時に観測することによって、絶対年周視
差を解く方法を採用している。しかしながら、観測領域に十分多くの星が撮像されている
場合は、統計的に年周楕円運動の位相を分離することが可能となる [Yano et al., 2006]。
つまり、年周楕円運動がほぼ同一といっても多少の違いがあり、一つの星に対して、多く
の星とのペアをとって解析することにより、統計的に分離可能となる。JASMINE では、
この性質を利用して 20◦ × 10◦ の限られた領域で、絶対年周視差を導出する。これらの推
定精度は、大フレーム内の星の数に応じて向上する。大フレームのサイズ変動がない場合
には、解析的考察によれば IX 2 /6 ≫ 1 もしくは ρX 4 /6 ≫ 1(I :星の数 ρ:個数密度
X :画角)を満たすと絶対年周視差が求まる [Yano et al., 2006]。数値実験したものを
図 16.13 に示す。例えば、星が 10 個/平方度程度あれば、10◦ 程度の画角でも絶対年周視
差はでる。これはほとんど問題なく達成される星の数である。
さて、ここで分離された各々の年周楕円の半径、つまり、年周視差の絶対的なサイズ
がどのようにして分かるのか、という疑問があるかもしれない。HIPPARCOS や GAIA
199
200
第 16 章 各ステージごとの誤差
図 16.13
画角サイズ変動がない場合の必要星密度
の場合、大円に沿う観測を行っており、大フレームに相当する「参照大円」のスケール
は一周が 360◦ であるという条件からキャリブレーションされる。しかし、サーベイする
領域を狭めることも小型の装置で高精度を得るための重要な条件であり、360◦ の大円領
域を観測することは困難である。したがって、JASMINE の採用する部分的な観測では、
360◦ というスケールを利用したキャリブレーションはできない。つまり、JASMINE の
方法では絶対的なサイズは分からない。ところが、HIPPARCOS の観測で星々の位置は
すでに 1mas の精度では決まっている。従って、およそ画角サイズ 20◦ のスケールに対し
て 1mas で決まっているのだから画角の誤差は 5 × 10−9 の精度で決まっている。つまり、
年周楕円の絶対的なサイズは定まらないといってもその誤差は非常に小さい。例えば、こ
の画角サイズ不定性による年周視差の誤差は 1 パーセク(年周視差 1 秒角)の星ですら
5 × 10−3 µas の誤差しかなく、目標とする 10µas より十分小さく、事実上この誤差は問題
にならない。
さて、現実には、大フレームのサイズは変動するはずである。この変動を知る必要があ
るが、ミッション時間の数年と言うタイムスケールで変動をモニターし続けることは非常
に困難である。そこで、観測データから大フレームのスケール変動を推定する方法を考え
る。ここで、大フレーム 1 枚を作る時間スケールでは画角が安定化されていることは仮定
する。なお、画角が変動すると言っても、その変動量は極めて小さい。
大フレームのサイズ変動を推定する方法としては、大フレームのサイズ変動は線形運動
であり、星の年周楕円運動と区別が可能であることを利用する。しかし、大フレームの画
角サイズ変動を星の運動と同時に解く場合、狭い画角では、星の年周楕円運動との区別を
精度よく分離できず、年周視差が精度良く解けない。そこで、黄道面方向に 1 次元的に”
腕”をのばし、画角サイズを広げる工夫を行う。黄道面方向のみでよいのは、年周楕円運
16.3 Stage3:大フレームの結合
図 16.14 実線は、拡大率誤差とは視野の端での位置のずれを角度であらわしたものである。
動がこの方向にもっとも顕著であり、年周楕円運動と大フレームのサイズ変動に伴う線形
運動との区別にとって最適であり、その方向だけで十分だからである。さて、腕にどの程
度の画角サイズが必要であるのか、10µas の誤差に抑えるという条件に対して、画角の大
きさに応じて必要な星の数がどの程度なのかを数値計算した (図 16.14 実線)。画角に応じ
て劇的に誤差が改善される。画角を大きく取るに従い、必要な個数密度は少なくてすむ。
画角 20 度では星の数は1平方度あたり 107 程度必要であるが、しかし画角に応じて必
要な星の数は劇的に下がる。画角に応じて劇的に下がるのは画角を広く取ることで拡大率
が精度良く求まり、それにより、原点が精度よく求まるので絶対年周視差が求まるともい
える。
一方、広い画角の観測を行う場合、連結枚数が大きくなるので、それによる精度低下と
のトレードオフが必要である。望遠鏡視野角 0.65 度四方の場合、連結方向の誤差を 10µas
に押さえるための大フレームの画角に対する必要な個数密度は図 16.14 の一番下の線のよ
うになる。連結の長さに応じて必要な個数密度が増加する (ただし、2 次元連結した場
合の連結誤差は縦方向横方向ともに目標精度を達成する必要があるので必要個数密度が大
きいが、この腕のように 1 次元方向のみ必要精度を満たせばよい場合は必要個数密度が小
さい)。
以上の条件と銀河系モデルから計算された星の個数密度から、腕は 60 度以上の視野角
があれば目標が達成されることが分かる。
16.3.2 誤差要因
望遠鏡自身の拡大率 (個別の小フレームの一辺の長さ) が十分安定あるいはモニターさ
れているとしても、小フレーム張り合わせを行なった場合、大フレームのパラメータとし
て拡大率に相当するパラメータが残ってしまうことが考えられる。
201
202
第 16 章 各ステージごとの誤差
性質の良い星の数
大フレームでの長時間の張り合わせによる運動パラメータの推定には、連星や重力レン
ズを強く受けた星など、運動の性質が良くない星を除去しなければならない。16.3.1 章か
ら、星の数が十分あることで、統計的には問題はない。性質の悪い星を確実に除去するア
ルゴリズムを得られるかどうかという点について検討をすすめているが、JASMINE の場
合は一日程度の間隔で星の位置を観測しており、単一星と異なる運動をする星を分類する
ことにはてきしている。
*GAIA: 連星に関する検討チームがある。
相対論的補正の誤差
太陽系内の重力場に基づく重力レンズ効果により、星の位置が見かけ上変化するという
相対論的効果の補正の精度について、検討を開始した。
具体的な要因として、太陽系天体 (惑星や小惑星など) の位置の推定精度と太陽系内を
光が通ってくるときの曲がり角の推定精度の関係、太陽の主に四重極による変形度合と太
陽の横方向レンズ効果による光線の曲がりの大きさの関係などについて、形式化を検討中
だが、見込みはついている。また、他にも海外で複数のグループが同様の検討をしてお
り、検討のキャリブレーションも可能である。
*GAIA: 相対論チームで検討。
16.3.3 トレードオフ項目
大フレームの選択
この仕様では、大フレームは領域としてミッション観測領域と同じ、時間は約 10 時間
分のデータの集まりと考えた。
HIPPARCOS の手法を分析すると、全観測フレームの一部を取り出して結合すること
で中間段階のデータを導出し、この中間段階のデータをさらに結合して全ミッション領域
の無矛盾解を得るという、二段階の解析を行っている。この理由は、
• 一度に全体解を得るためには、問題のサイズ (反転すべき行列のサイズあるいは最
小二乗法で解くべきパラメータ数) が大きくなりすぎて、問題が manageable でな
いため、manageable なサイズに問題を分割する必要がある。
• 宇宙にはかなりの比率の連星が存在し、従って運動パラメータを考慮した解析が可
能な十分位置天文的に性質の良い星を、小フレームパラメータを解くに十分な数確
保することは難しい。そこで、星が短時間では不動である仮定が成立する程度短時
間の小フレーム同士の結合を行うことで、小フレームパラメータを十分精度良く解
くことが出来る。
• 短時間の小フレーム結合操作の中では、装置安定性も十分な精度で仮定できる。装
置パラメータは定数として解くことが許される。
ところで、HIPPARCOS では中間データは約 10 時間分の大円である。中間データは、
16.3 Stage3:大フレームの結合
203
図 16.15
QSO 候補天体
この仕様における大フレームにとらわれず、領域、時間とも、柔軟に考えてよい。
小フレームを張り合わせる誤差に由来する V 値が大フレームの選択にどの程度
依 存 す る か に つ い て は 現 在 検 討 中 で あ る 。V 値 が 大 フ レ ー ム の 選 択 に あ ま り 依 存
しなければ、大フレームは装置安定性やキャリブレーションの手法などの条件から
最適化されるものである。HIPPARCOS の大円解析に関して、隣接した視野同士の
張り合わせに由来する誤差を評価したものは [Høyer et al., 1981] にある。また、視
野同士の張り合わせによって全体の位置情報を得る方法は、地上の位置天文観測で
は古くより研究されており [Eichhorn and Jeffreys, 1971, Eichhorn and Clary, 1974,
Einchhorn and Russell, 1976, Eichhorn, 1993]、この方法を応用した地上位置天文観測
が中国で計画されている [Yu et al., 2004, Peng et al., 2004]。
大フレームの精度確保の方法
大フレームのスケールの年周期および時間線形の変動は、年周視差および固有運動の場
所による線形的な原点のずれと縮退する。これを解くため、JASMINE では 4 つの QSO
を用いる。現在、OGLE などの観測によって、バルジ付近の QSO の観測が進められてい
る。JASMINE では、名古屋大学の住氏の協力を得て、QSO を特定する予定である。
QSO の候補と思われる天体は、JASMINE の観測領域で約 50 ほど見つかっている (図
16.15)。ただ、候補の選択は、変光によるものや、2MASS・X 線・電波のカタログに頼っ
て絞り込む間接的な証拠によるもので、これらのなかにどの程度本当の QSO があるかは、
詳細な分光追観測を行わなければわからない。LMC や SMC では、こうして見つけた候
補天体の約 40% が実際の QSO だが、バルジ領域で同様の比率で QSO が存在するとすれ
ば、JASMINE の座標系構築に使える QSO は十分ある。現在、候補天体の中で K < 11
のものが 5 つ、K < 14 だと 20 個以上となる。これに単純に 40% の係数を掛ければ、た
とえば K < 12 程度で十分だが、明るいものは QSO 以外の星である可能性もあるので、
現在の JASMINE の仕様は K < 14 の QSO を 4 つ利用するということで検討を進めて
いる。
今後、候補天体の分光観測を進めて、必要な数の QSO を見つける必要がある。ま
た、地上からの QSO サーチはバルジの中でも吸収の低い南東がわにかたよっているが、
JASMINE の座標系固定のためにはサーベイ領域全体にわたって均一に QSO があること
204
第 16 章 各ステージごとの誤差
が望ましい。今までサーベイされていない領域で QSO の候補天体を絞り込む作業も同時
に進める予定である。
16.4 Stage4:座標系の固定など
16.4.1 手法概要
これまでの段階で構築された座標系は、星の運動と座標系のパラメータを連立して解い
てきた。星の運動と縮退する成分は、不定パラメータとして残る。具体的には、視差楕円
運動に相当する成分は解かれているが、座標系の位置と方向、その時間一次変動成分は、
ミッション内部で原理的に無矛盾に解けないものであり、外部天体を参照する必要があ
る。JASMINE では、すでに Stage3 で QSO を用いてスケールと原点の変動を止めてい
るので、残る自由度は絶対的な場所になる。
そこで、他の観測データを用いて ICRS 座標などの標準的な座標と結合しなければなら
ない。
16.4.2 誤差要因
16.4.3 トレードオフ項目
第 IV 部
付録:データ解析・データハンドリ
ング・システムシミュレーション
207
付録 A
Simulator の設計
*1
A.1 はじめに
国立天文台を中心として、人工衛星を用いたプロジェクトである赤外線位置天文観測衛
星 (JASMINE)[Gouda et al., 2003] が計画されている。人工衛星を用いた場合、地上の
プロジェクトとは異なるいくつかの特徴がある [山田良透 et al., 2004]。
• 装置の運用期間は搭載機器の機械的寿命や放射線による劣化などのため、地上観測
機器に比べて極端に短い。この期間内に、効率的な観測を行う必要がある。
• 一度装置を宇宙に打ち上げてしまうと、予めプログラムで想定されている機器の調
整以外は不可能である。何か予想外の不具合が発生しても、現場で修正することは
不可能である。
• 天文学者以外に、ロケット・衛星などの専門家とのディスカッションが必要となる。
• 一部の機器は地上環境では完全な予備実験が困難である。
このため、天文学・観測装置・ロケット・衛星の要求をクリアーにして、あらかじめ予想
できることは万全の準備を行うとともに、予想外のことが起こった場合も対処しやすい
ようにしておく必要がある。このため、計算機を用いて、衛星の軌道から観測、データ転
送にいたるまでのシミュレーションが有効となる。JASMINE と同様の位置天文観測衛
星プロジェクトに、ESA の GAIA や NASA の SIM があるが、GAIA には Simulator
Working Group(SWG) があり、また SIM でもこういったシミュレーションが行われて
おり、その重要性が認識されている [O’Mullane and Lindegren, 1999]。
ところで、シミュレーションといえば、従来でも装置開発において、また理論研究にお
いても盛んに行われてきた手法である。従来のシミュレーションや数値計算では、計算性
能だけが重視されてきた。一方、ここ 10 年から 20 年のソフトウエア工学では、ソフトウ
エアをどうしたら「より保守性が高く」「より再利用性が高く」できるかということが研
究されてきた。
例えば人工衛星の場合、上で述べたように、シミュレーションシステムに関係する知識
は天文学以外に装置、ロケットのような輸送系、姿勢制御系や通信、電力などの衛星シス
*1
この章は、国立天文台報 [山田良透 et al., 2004, 山田良透 et al., 2007] に報告された論文の要約である
208
付録 A
Simulator の設計
テムまで多岐にわたる。一人の研究者がこれらのすべてにわたって精通することは不可能
である。シミュレーションの一部にはこういった分野の専門知識を組み込む必要が生じ
る。そこで、個別の研究者は部分的にコード開発を行い、これを「再利用」して全体を構
築するというスタイル、共同開発が必要となる。
そこで、ソフトウエアの共同開発に関しては、ここ 10 年フリーソフトウエアや企業で
のソフトウエア開発などの現場において、さまざまな蓄積ができた。こういったものを積
極的に導入して、効率よい共同開発を行ってゆく必要がある。天文学において、ソフトウ
エア工学で進歩した技術の導入は不十分であり、今後積極的に行ってゆくべきだという
認識は、GAIA Simulator グループの認識と一致している [Luri and Babusiaux, 2001]。
JASMINE において、このようなソフトウエア工学における新しい技術を導入してゆく開
発スタイルが必要となってくる事情は、プロジェクト自身の規模が時間的にも人数的にも
大きくなることによる。今後の天文学におけるビッグプロジェクトでは、同様な技術導入
が必要になると予想される。
A.2 情報科学の手法の導入
JASMINE Simulator はプログラムの規模も大きくなり、またプログラムの一部は実際
のデータ解析に利用することも視野に入れており、時間的にも長期にわたるソフトウエア
プロジェクトとなる。このため、プログラミング言語のみならず、開発手法やソフトウエ
アの保守・管理の方法についても、以下に示すようなここ 10 年で発展してきた最新のソ
フトウエア技術を導入する必要がある。
JASMINE Simulator は、銀河モデル、観測装置、衛星システム、解析手法から得られ
るサイエンスに至るまでの、観測にかかわる全体をまとめてシミュレーションすることに
よってその相互の関連を明らかにすることを目的としている。従って Simulator 全体は
巨大なものとなるが、その中身は小さな部品から構成される。それぞれは、従来の科学シ
ミュレーションや装置シミュレーションなどで作られているような部品である。従来で
も、こういった部品を少数組み合わせて行った計算もあった。しかしながら、こういった
部品を多数組み合わせる際には、ある部品と他の部品の独立性を高めることが重要とな
る。例えば、観測装置にかかわるプログラムを修正したとしても、その効果が銀河モデル
から解析手法のモデルまで、プログラム全体に波及するのでは、このような大きなプログ
ラムの保守や開発が困難となる。
このような細かい部品を寄せ集めて、しかも部品同士の独立性を高めることによって、
プログラムの開発や保守を容易にしようという考え方が、オブジェクト指向と呼ばれる考
え方である。オブジェクト指向では、プログラムは「オブジェクト」と呼ばれる単位で構
築される。オブジェクトは、例えば光学系・検出器など、現実の「もの」を計算機の上に
適切にモデル化したものである。JASMINE の場合、銀河モデル・光学系・検出器・デー
タ処理系などがオブジェクトになる。システム全体としてはこれらは複雑に絡み合うが、
全体をまとめてプログラムすることはいたずらに問題を複雑にする。光学系のプログラム
を考える時は光学系のことだけを、検出器のプログラムを考える時には検出器のことだけ
を考えられれば、問題を多少単純化することができる。これが、問題を「オブジェクト」
に分割することの意義となる。
また、こういった装置の動作自体は複雑であるが、外から見れば
A.2 情報科学の手法の導入
銀河モデル
光を発するもの (天体からの光)
光学系
光が入ってきて光が出てくるもの
検出器
光が入ってきて電気信号が出てくるもの
データ処理系
検出器の電気信号を数値に変換するもの
というような役割を持つものとして単純化できる。こういった装置を組み合わせてサイエ
ンスを行なうためのシステムを考える時、ある装置の他の装置に対する影響は多くの場合
単純化できる。考慮すべき影響は、次のような点だけである。つまり、個別の装置の誤差
がシステム全体の性能にどのように影響するのかということ、衛星システムの場合は電
力、実装の位置などによる熱や振動の影響と言った少数の影響を考慮すれば良いはずであ
る。従って、複雑なプログラムの中身のうち外に対してオープンでなければならない要素
は限定されるであろう。オブジェクト指向では、外部プログラムから変更可能なもの、外
部プログラムから参照できるけれども変更できないもの、外プログラムから参照できない
ものを区別することによって、オブジェクト (部品) 同士の独立性を高めることが可能で
ある。
もちろん従来型のプログラム言語 (FORTRAN など) でも、気を付けてプログラムすれ
ばこう言ったことが全て可能である。例えば、上述の「変更できない」ものは、「変更し
ない」ように気を付けてプログラミングすれば良い。即ち、言語仕様の上でのさまざまな
機能は、これ無しでは原理的にプログラミング不可能であることを意味するものではな
い。あくまでもプログラミングをよりやりやすくするためのものである。しかし、言語仕
様のなかで巨大なプログラムを開発する場合に必要な機能が与えられていることが、プロ
グラミングの効率を高める。オブジェクト指向言語には長年の歴史があり、その中でさま
ざまな蓄積 (第 2.2 章参照) もある。こういった蓄積が、従来型の言語ではなくオブジェ
クト指向の枠組で語られてきていることも、オブジェクト指向を利用するメリットであ
る。Simulator 構築の説明に必要なオブジェクト指向の概念は、第 2.1 章で説明する。現
在は、C++ や ruby など多数のオブジェクト指向言語がある。この中で、我々は第 5 章
で示す理由より JAVA 言語を選択する。
オブジェクト指向プログラミングでは、部品同士の独立性を高めることが重要であると
述べた。しかし、部品同士がまったく関連しないわけではなく、プログラム上必要最低限
の関連は持っている。オブジェクト指向プログラムを設計する際には、こういったこまか
な部品同士の関連や状態の変化などを把握しておくことが重要である。このために開発さ
れた言語が UML(Unified Modeling Languate:統一モデリング言語) である。UML は、
部品同士の関連のしかたや動作を図で示すものである。オブジェクト指向では、プログラ
ムを細かな部品に分けることが多く、部品の種類や数が多くなる。これらの関連のしかた
や動作をプログラムのソースコードを読んで理解することは困難な作業となる。そこで、
図を用いることで、プログラムの全体像を把握することが容易となる。また、図に表示す
るクラスを適切に限定することで様々な詳細度でプログラムを把握することを可能にし、
プログラムの部品同士の関連性が適切に考慮されているかなど、プログラムの保守性や再
利用性についての検討も可能になる。JASMINE Simulator も大規模なプログラムとな
り、この設計を説明するには UML が必要なので、これを第 2.2 章で解説する。また、オ
ブジェクト指向は「再利用性の向上」や「保守性の向上」などをその意義としてうたって
いるが、オブジェクト指向言語を用いたからといってそういった目標が達成されるわけで
209
210
付録 A
Simulator の設計
はない。オブジェクト指向を使って再利用性や保守性を高めるためのノーハウの蓄積がパ
ターンと呼ばれる。これを、あわせて第 2.2 章で解説する。
JASMINE Simulator は、共同開発である。共同開発においては、開発途上の変化し続
けるコードを開発者の間で共有する技術が必要となる。JASMINE では、このコード共有
技術として、オープンソースの世界で広く用いられている技術である CVS を用いている
が、これを第 2.3 章で紹介する。
開発者においてもユーザーにおいてもプログラムに関する文書化は必須である。計算
コードが開発途上で変化しつつある場合、文書とコードが整合しないことがしばしば起こ
る。そこで、JASMINE において用いた文書化技術を第 2.4 章で解説する。また、重い処
理を分割して複数の計算機で実行するための分散処理技術として CORBA を導入したの
で、これを第 2.5 章で紹介する。
A.2.1 オブジェクト指向技術
フリーソフトウエアや企業のソフトウエア開発で進められてきた蓄積の一つは、オブ
ジェクト指向技術の発展である。オブジェクト指向とは、プログラムを「オブジェクト」
と呼ばれるもので構成する考え方である。そもそもオブジェクト指向は実際のもの (装置
や組織、システムなど) をシミュレーションするプログラムを開発する手段として発生し
た。シミュレーションすべき対象の構成要素として、基本的な単位となるものを、計算機
の上で「オブジェクト」と呼ばれるもので表現し、「オブジェクト」同士が情報をやりと
りすることでシミュレーションを構成しようというのが、基本的な考え方である。
オブジェクト
現実のものを計算機上で表現するもので、オブジェクト指向プログラミン
グではプログラムの基本要素となる。計算機の上でのオブジェクトの役割は、「状
態」と「振舞い」をもつものと規定される。状態は、たとえば装置が ON になって
いるとか OFF になっているとか、より複雑な装置では多数のモードを持っている
うちのどのモードになっているかというようなことを表す。振舞いは、パルスが一
つはいってくると「1」を、二つはいってくると「2」を返すというような、動作
を表す概念である。
属性
オブジェクトの状態を表すもの。プログラム上は、変数に適切な値を保持すること
で、属性を表現する。例えば装置などの「もの」の大きさや重さ・位置、物性値な
どを表す属性がある。
メソッド (操作)
オブジェクトの振舞いを表すもの。プログラム上で具体的なものの動
作を表す場合、必要に応じて外から与えられた情報に基づいて自身の状態を変更し
たり、必要な計算を行なって値を返す必要がある。こういった動作は、プログラム
上は関数を作成して行なう。
クラス
実世界では、同じ種類の多くのオブジェクトが存在する。このオブジェクトの設
計図、あるいは雛型をクラスと呼ぶ。クラスから見ると、個々のオブジェクトは
「インスタンス」(実例) と呼び、雛型であるクラスからオブジェクトを作ることを
インスタンス化と呼ぶ。例えば C 言語や Fortran 90 では構造体と呼ばれる複数の
変数を一括りにまとめて一つの変数のように扱う方法が使えるが、構造体の型定義
がクラスに対応する。一方、プログラムの中には実際に同じ構造体に対応する複数
A.2 情報科学の手法の導入
の変数が存在するが、これらの各変数がオブジェクトに対応する。
それ自身はインスタンスを作れず、このクラスから継承されたクラスだけがインスタンス
を生成することが出来るような、特別のクラスを導入する方が、プログラムがきれいにま
とまることがある。このような特別なクラスを抽象クラスと呼ぶ。
オブジェクト指向の重要な性質は、以下の 4 点にまとめられる。
抽象化
対象を表現するのに必要なデータ (属性) を一括りにすること。例えば星を表現
するのに必要な光度、色指数、半径、質量といったデータを一括りに扱って、「星」
という概念を構築することができる。
カプセル化
属性とメソッドの組を作ることによって、あるデータを扱うための手続きが
プログラム全体に散在することを防ぐ。また、オブジェクトの状態を変更するため
の内部的な手続きを隠して、外部からは決められた手段によってのみ変更可能であ
るようにすることで、情報を隠蔽する。例えば測定装置のスイッチを入れるた場
合、内部的にはどの回路にどの順番で電流を流すといった複雑な手続きがあるが、
外からは「スイッチを押す」ということしか見えないようにすることで、装置は使
いやすくなる。装置を「使えない」状態から「使える」状態に変更するには、これ
で十分である。
継承
抽象化・カプセル化されたデータと操作の組の性質を、他の同様なデータと操作の
組に受け継ぐ機構を持つこと。例えば、変光星は星の全ての性質を持っており、さ
らに変光周期などの変光星独自の性質を持つ。つまり、プログラミングの上では
「変光星」は「星」を継承して作ることが出来る。「変光星」クラスは「光度を取得
する」など「星」が通常持っているほとんどのメソッドを使うことが出来る。更に、
「変光周期を取得する」など変光星独自のメソッドを追加することが出来る。通常
の「星」と「変光星」で共通するメソッドは、これを呼び出す側は相手のオブジェク
トが「星」のインスタンスか「変光星」のインスタンスかを意識する必要がない。
多相性
クラスが継承された場合に、同じ名前のメソッドで内部的に異なった処理を行な
えるようにすること。例えば通常の星の光度は属性として持つ光度を返せば良い
が、ある時刻に観測される変光星の光度は適当な関数によって計算されるはずであ
る。このように、実際に内部で行なう処理は異なっているが、外から見れば、実際
に処理の対象となっているオブジェクトは「変光星」なのかそうでない一般の「星」
なのかをを知らなくても「光度を取得する」という同一の処理で行なうことができ
るような機構のことを、「多相性」と呼ぶ。
巨大なシミュレーションプログラムを開発した経験がある研究者なら、部品の独立性を
高めたり、再利用性を高める試みをした経験があるはずである。FORTRAN プログラム
なら、メインプログラムだけで組まれたプログラムを適切にサブルーチンに分割するとい
うような作業である。情報科学の分野では、このレベルの再利用性を高める試みを、「構
造化プログラミング」という名前で呼ぶ。オブジェクト指向は、構造化プログラミングの
後に誕生した技術であり、構造化プログラミングで不足している部分を補っている。例え
ば、FORTRAN 90 や C では属性を「構造体」という形で一括りにできるが属性とメソッ
ドの組を作ることができない。すなわち、FORTRAN 90 や C でプログラミングを行う
場合、上であげたオブジェクト指向の重要な性質である 4 点、
「抽象化」
「カプセル化」
「継
211
212
付録 A
<<XeI^Cv>>
NX¼
<<type>>
class¼
-®«
#®«
+®«
Simulator の設計
SuperClass
Wñ
®«Xg
«Í-(private)A#(protected)A+(public)
+ì()
Ä»
subclass
図 A.1
1
1
classB
-a : classB
ì
クラス図の例:クラスは三つの箱で表される。上段がクラスの名前と、記述し
ておくと便利なクラスの特性 (ステレオタイプ)、中断が属性、下段がメソッドを表す。
クラス同士の関係は、矢印付きの線で表す。可視性は、自身以外のクラスから参照・変
更できないものを private、継承された子クラスと自身以外のクラスから参照・変更で
きないものを protected、自身以外の任意のクラスから参照・変更可能なものを public
と呼ぶ。参照できるが変更できないようにするためには、属性を private にして参照す
るメソッドを public で定義することで実現する。継承されるクラスは、子クラスから
親クラスへ白抜き三角の矢印を付けて表す。また、別のクラスをクラスの属性として持
つ場合、線の根本に菱形を付けて表す。菱形が図のように黒塗の場合は線の根もと (菱
形のついている側) オブジェクトが消滅すると線の先のオブジェクトも同時に消滅する
ことを表し、白抜きの場合は根もとのオブジェクトが消滅しても先のオブジェクトは消
滅しないことを表す。線の上に付けられた数字は多重度を表す。すなわち、図では根も
とのオブジェクトが一つに対して先のオブジェクトが一つ存在する。数が定まってい
る場合は数字を、複数で数が不定である場合は数のかわりに*印を記述する。図では属
性欄に classB のインスタンス名が書かれているが、属性欄に書かずに線の上にインス
タンス名を書くことも出来る。
[
o^]
üúÌvZ
図 A.2
õxÌvZ
状態図の例:オブジェクトの状態の変化を表す。始状態を黒丸で、終状態は黒
丸の周りを白丸で囲ったもので表す。途中にいくつかの状態を持つ場合、その状態と状
態間を遷移する理由 (どのメソッドが呼ばれた場合等) を矢印で示す。図では始状態か
ら「登録」というメソッドが呼ばれると「周期の計算」という状態に移ることを表す。
承」
「多相性」のうち、
「抽象化」だけが可能である。一方他の 3 点の概念は、言語仕様に
含まれていない。カプセル化は計算コードとデータを局在化する効果があり、継承や多相
性は「構造体」の定義をより意味論的な側面から構築しやすくする効果があるという意味
で、オブジェクト指向言語の導入は FORTRAN や C に比べて優れていると言える。一
方で、オブジェクト指向は計算機に対して非常に重い処理を要求する。コードの実行効率
という意味においてオブジェクト指向言語が従来言語に劣るとしても、コードの開発を含
めた全体の時間的な短縮となることは間違えない。さらに、実行速度の問題はハードウエ
アの進展により時間とともに解消してゆくと予想される。
A.2.2 UML とパターン
このようなオブジェクト指向の概念、「クラス」や「オブジェクト」を用いたプログラ
ムの設計において、共通の言語 (図式) が作られている。これは、UML (統一モデリン
グ言語、Unified Modeling Language) と呼ばれている。継承や委譲 (あるクラスのイン
A.2 情報科学の手法の導入
スタンスが別のクラスの属性となっている) のような、クラス同士の関係を図式的に表
すものである。プログラムの全体像を視覚的にとらえることができるため、細部にとら
らわれずに短時間で全体を把握することができ、複数の開発者がプログラムの設計につ
いて議論するために UML が活用される。JASMINE Simulator の規模のプログラムに
なると、UML 図無しに開発するのは難しい。UML の解説書は多いが、例えば具志堅他
[具志堅隆児 et al., 2002] などがある。UML には全部で 9 種類の図があるが、良く使わ
れる図として、ここでは二種類の図を紹介する。クラス図 (図 A.1) は、クラスの属性とメ
ソッドの名前を示すとともに、クラス同士の継承やあるクラスが別のクラスを属性として
持つ等の関係を示す図である。状態図 (図 A.2) は、ある一つのクラスに注目して、クラ
スが持ちうる状態を列挙し、ある状態から別の状態へ移行する条件 (呼び出される関数の
名前) を示す図である。フローチャートはアクティビティー図という名前で UML の 9 種
類の図のうちの一つとして存在している。この他、クラスではなくオブジェクトがどのよ
うに構築されているかを見るためのオブジェクト図、複数のクラスの状態変化の時間的な
変化に着目した状態遷移図などが、よく使われる UML 図である。こういった図を編集す
る機能を有するソフトウエアを、CASE(Computer Aided System Engineering) ツール
と呼ぶ。CASE ツールでは、さらに UML 図からプログラムのテンプレート (クラス宣言
文のほか、属性名と関数の宣言文) を生成したり、逆に既存のプログラムから UML 図を
生成したりする機能を持つ。
言語がサポートしている抽象化やカプセル化の機能だけでは、再利用性や独立性が高い
プログラムは書けない。あるクラスの中の少しの変更が別のクラスにも影響し、それが波
及して結局コード全体に影響を及ぼしてしまう場合がある。こういうコードを「クラスの
結合性が高い」コードと呼び、逆に「クラスの結合性を下げる」ことが、保守性と再利用
性を向上する。プログラム上のある種の目的を与えた時に、クラスやオブジェクトをどの
ように組み合わせれば便利なのかをまとめたものに、デザインパターンがある。Gamma
et al. 1995[Gamma et al., 1995] の中には、目的毎に整理された 23 のパターン (クラス
やオブジェクトの組合せ方) が掲載されており、同じ目的を実現するための他の解決方法
と比較して、そのメリット・デメリットや実際にどういったプログラムのどういう部分で
利用されているかという経験がきれいに整理されている。パターンは、オブジェクト指向
がメリットであると唱っているオブジェクトの再利用性や独立性を最大限に引き出すため
の、いわば経験を分析し、まとめたものとして、有用である。
例えば、図 A.3 のようなオブジェクトの階層的な構造が必要になったとしよう。衛星で
は、ある対象が幾つかの部品の組合せで出来ている。衛星自身は「光学系」や「検出器」
という部品の組合せであるが、さらに「光学系」は複数の鏡・架台・支柱などを構成要素
として持つ。「検出器」は複数の CCD 検出器やそれを処理するための A/D 変換器などの
回路から構成される。そうすると、複数の部品の組合せであることを表す「Composite」
なクラス (集約クラス) と、これ以上分割できない「Leaf」なクラスを用意することで、
この構造が実現できる。具体的には、図 A.4 のようなクラスの構造を用意すれば良い。
これは、Composite パターンと呼ばれるパターンの適用例である。composite パターン
は、children を複数持つだけでなく、図のようなツリー構造を作ったり変更したりする
ために Add や Remove というメソッドを持つ。この図の中の Operation というメソッ
ドは、Composite クラスではツリーを走査して自身の子である Component クラスの
Operation メソッドを順次呼び出して適切な処理をするように作られるものである。例え
213
214
付録 A
Simulator の設計
aComposite
aLeaf
aLeaf
aComposite
aLeaf
aLeaf
aLeaf
図 A.3 オブジェクトの階層構造。aComposite および aLeaf と書かれたものは、
図 A.4 に書かれる Composite クラスおよび Leaf クラスのインスタンスである。
aComposite のオブジェクトは aLeaf あるいは aComposite オブジェクトを任意の個
数持つことが出来る。aLeaf オブジェクトは以下にオブジェクトを持たない。これによ
り、木構造の階層が生成できる。
Component
Client
*
+Operation()
+Add(in i : Component)
+Remove(in i : Component)
+GetChild(in j : int)
Leaf
+Operation()
図 A.4
Composite
+Operation()
+Add(in i : Component)
+Remove(in i : Component)
+GetChild(in j : int)
-children
1
forall i in children
i.Operation()
図 A.3 で示すオブジェクトの階層構造を実現するためには、この図に示すよ
うなクラス構造を用意すれば良い。Composite クラスは Component クラスを複数持
つことが出来、children という名前でアクセスできる。例えば衛星全体の装置を全て
Component という親クラスからの継承で用意し、電力や重量の計算を行なうメソッド
を親クラスで定義しておく。Leaf クラスは自身の消費電力や重量を返す。Composite
クラスは配下にある Component クラスでの電力や重量の計算を行ない、これを足し
算したものを返すように設計しておくと、クライアントからは階層の任意のレベルでこ
のメソッドを呼ぶことにより、部分あるいは全体の消費電力や重量を計算することが出
来る。
ば、電力や重量など全体の総和に相当する量を計算するような場合に用いることもできる
し、ツリーを走査して適切な Component だけを取り出すなど、一般にツリーを走査する
ことが必要になる操作の実装に使われる。例えば電力や重量の計算などは、各部品の合計
として計算される。Composite クラスでは、配下にある Leaf クラスの電力や重量を計算
した上で、その総合計を返すようにしておけば良い。これにより、例えば設計により鏡が
一つ増えたとか、検出器が二つ減ったとかいうことは、階層クラスからオブジェクト構造
が適切に生成されていれば、重量や電力の計算の部分に何ら変更を加える必要はない。
A.2 情報科学の手法の導入
JASMINE シミュレーターにおいてオブジェクト指向性が重要である理由は、複数の分
野の専門家があつまって、大規模なコードを、共同で開発するところにある。適切なカプ
セル化によって、自分の専門外の部分には変更を加えずに、自分の専門の部分のコードの
修正だけを行なって行くことが出来るような仕組みが望ましい。この意味で、オブジェク
ト指向の利点を最大限度に生かすため、随所にパターンを適用している。
A.2.3 CVS
コードの共有技術も進歩している。異なる研究機関に所属する複数の研究者によって、
コンピュータープログラムを共同開発する場合、ネットワークを利用して、複数の開発者
がコードに機能の追加やバグの修正などの変更を加えて行き、それが整合的に行なわれる
必要がある。企業では企業毎に独立のシステムを利用している場合も多いようだが、フ
リーソフトウエアの世界で標準的に利用されているのが、cvs と呼ばれるバージョン管理
システムである。我々は、京都大学に設置した計算機の上に cvs と呼ばれるサーバープロ
グラムを走らせて、コードを共有している。
A.2.4 文書化
また、我々は JAVA 言語での開発を行なっているが、文書化は JAVA 附属の javadoc
と呼ばれるプログラムによって行なうようにしている。これは、プログラムの中にコメン
トとして説明を書き込むことによって、プログラムの説明文書をプログラムと一緒に保管
する形式である。マニュアルなどの文章を別の文章として管理する手法はあり得るが、プ
ログラムの更新と文章の更新を同期することが難しく、すぐにやくにたたない文章となっ
てしまう。これを避けるために、プログラムの中に説明文書を入れることが行なわれてい
る。C++ では doc++ と呼ばれるツールがある。
A.2.5 分散オブジェクト
分散処理には、国立天文台等の研究所に設置された並列計算機などの上で利用可能なも
のもあるので、多くの天文研究者には馴染み深いものである。しかしながら、これらは直
接コードの中で並列計算を行なう部位を指定して、例えば一つのループ計算に含まれる数
行のソースコードを、ループを分割していくつかの CPU で実行するというように用いら
れる。分割して個別の CPU に渡される処理量が比較的小さいので、「粒度の小さい分散
処理」と呼ばれる。この場合、複数の CPU の間をつなぐ通信は高速なものを仮定してお
り、専用の並列計算機が無ければパフォーマンスは出せない場合が多い。
一方、オブジェクトという単位で並列化を行なうための、分散オブジェクト技術があ
る。並列計算機の上の並列化は、プログラム言語のコンパイラが計算をどの CPU に割り
振るかを判断するけれども、分散オブジェクト技術では使用する言語に依存しない通信
手段だけを定めている。並列計算機はもとより、ネットワーク上に分散する複数のコン
ピューターでの並列などにも対応する柔軟性がある。また、言語に依存しないので、別の
言語で書かれたプログラム同士を結合するためにも使うことができる。
215
216
付録 A
Simulator の設計
図 A.5 JASMINE Simulator の仕様決定の流れ。仕様決定では、検出器の pixel サ
イズをもとに最適な光学系の焦点距離を決める。実際の観測における情報の流れは光
学系を通過した光が検出器に落ちるので、仕様決定における情報の流れと観測シミュ
レーションの情報の流れは反対向きになる。
A.3 JASMINE Simulator の機能の分析
前述の通り、JASMINE と同様の位置天文観測では、GAIA が同じような計画をもっ
て、Simulator Working Group(SWG) を立ち上げている。
GAIA では、まずシミュレーションすべき対象を「衛星システム」「光学系」「検出器」
「観測対象である宇宙」などのコンポーネントに分類した。GAIA SWG が示しているク
ラス図を見ると、これらの対象は抽象クラスで定義され、検討の進展に従って各コンポー
ネントの具象クラスの詳細度を上げるような形の設計を行っているようである。これらの
関連のしかたは実際の観測における情報の流れに沿って予め規定している。即ち、銀河モ
デルの中にある星が光を発し、この光が光学系を通過し、検出器で電気信号に変換され、
テレメトリ・データに変換され、生データが生成される。光学系と検出器の姿勢を決める
ために、衛星モデルが利用される。しかしながら、JASMINE で検討を進めたところ、こ
のような枠組みでは JASMINE の検討を十分に支援できないことが分かってきた。
JASMINE の現段階で最も重要な作業は、JASMINE 自体の仕様を決めることである。
図 A.5 に、仕様決定の流れを示した [JASMINE チーム, 2003]。一例をとると、現段階の
検討では JASMINE の光学系の焦点距離は検出器の pixel サイズと光学系の口径と観測
A.4 JASMINE Simulator の設計–フレームワークの構築
波長から決めている。口径と焦点距離は光学系の属性、pixel サイズは検出器の属性と考
えるのが自然だが、光学系の属性の一つである焦点距離を決めるために、光学系自身のほ
かの属性 (口径) との整合性だけでなく、検出器の属性 (pixel サイズ) が必要となる。こ
れは、実際の観測の時の情報の流れの上流に位置するものの属性値を決めるために、下流
に位置するものの属性値が必要となる場合があることを意味している。実際の観測におけ
る情報の流れに従ってプログラムが動作する GAIA Simulator のような設計では、この
ような場合には対応できない。
そこで、実際の情報の流れに沿っている場合にも、その逆の場合にも情報の受渡しを可
能にするようにするため、入口と出口が定義されていて中身に関係ない情報受渡しの手段
を提供することが必要となる。このため、検出器や光学系などのコンポーネントをまとめ
て扱えるような「モデル」という抽象概念を導入する。こういった枠組を作った後に、検
出器や光学系、データ転送、衛星軌道や振動擾乱源などをモデル化して、コンポーネント
として作り上げれば良いことになる。この抽象化によって、もちろん情報の流れに沿った
通常の評価を行なうことは可能だし、それ以外の問題にも対応する柔軟なシミュレーショ
ンの枠組を構築することが可能となる。
大規模シミュレーションなどを行った経験があるユーザーは、例えば AVS などのグラ
フィックソフトウエアと同様の設計といえば理解しやすいかも知れない。等高線を書く、
ベクトル場を表示するなど、さまざまなコンポーネントが用意され、これらのコンポーネ
ントの間に情報を流す仕組みが用意されている。従って、一見 AVS などのソフトウエア
をベースにしてそのプラグインを組み立てればよいように思われる。実際こういった大規
模な作図ソフトウエアは、ユーザーによってプラグインを作る手段が示されていて、ユー
ザーが機能を拡張することが出来る。しかしながら、通常のグラフィックソフトウエア
で可能なことは、これらの作図用「コンポーネント」を拡張することである。データ自身
は拡張できない。メッシュの上に与えられたスカラー場やベクトル場のデータ、時系列
データ、スカラーパラメータなどをコンポーネント間で流すことは可能だが、予め用意
されたグラフィック用のデータ形式とは異なる情報を流すことは出来ない。この制限は、
JASMINE Simulator を AVS の拡張として構築することを難しくしている。
このため、我々はまずモデルの間に情報を流すというレベルの抽象化を行ったソフトウ
エアを構築することとする。その上で、モデルを具体化したものとして JASMINE 用の
コンポーネント、検出器や光学系・衛星システムなどを構築してゆく。利用方法は、AVS
などの使用方法に慣れているユーザーならほとんど迷うことは無いだろう。
A.4 JASMINE Simulator の設計–フレームワークの構築
A.4.1 プログラミングにおける設計の位置付け
前の章で、JASMINE Simulator が持つべき機能について分析した。この章では、
JASMINE Simulator の設計について議論する。現代のソフトウエアの開発は「モデリン
グ」、
「設計」
、
「実装」の順で行なわれる。出来上がったものを見て、問題点を洗い出して
更に「設計」、「実装」のプロセスが繰り返され、より洗練されたソフトウエアとなる。情
報科学の方法論は、実際のもの作りの経験をプログラム開発に焼き直して整理している。
もの作りで言えば、
「モデリング」はポンチ絵を書く段階、
「設計」は設計図面を書く段階、
217
218
付録 A
図 A.6
Simulator の設計
JASMINE Simulator の 機 能 を 検 討 す る た め の プ ロ ト タ イ プ 。こ れ は 、
「CCD」「光学系」「観測手法」「仕様計算独自のモデル」の 4 つの「モデル」から
構築されている。それぞれのモデルの持つ属性値が、右側のウインドー内に四角で囲っ
て表示されている。それぞれの「モデル」の一部の属性は他の「モデル」より与えられ
る。また一部の属性は、右側のウインドーに示されるスライダー部品や選択部品によ
り、ユーザーが設定できる。依存性グラフは、このバージョンでは表示されていない。
「実装」は実際に材料を加工してものを作る段階にそれぞれ相当する。
モデリングのポイントは、機能を明確化することにある。前の章で行なったように、機
能を分析して必要な部品を洗い出したところで、おおよその「モデリング」が完了してい
ると考えられる。実装はプログラムを一行一行書いてゆく作業に相当し、従来的なプログ
ラミングではモデリングが出来たら実装に取り掛かる。当然、実装では同じ機能を実現す
るのに複数の手段をとり得る。例えば、繰返しを表現するのにループを用いるか再帰を用
いるかというような判断が随所に現れる。従来的なプログラミングの経験から考えると、
「モデリング」と「実装」の間に入っている「設計」は新しい概念である。端的に言うな
らば、設計段階で考えるべきことは、ループを用いるか再帰を用いるかなどの実装の詳細
に依存しないレベルでの、全体の組み立てかたを考える作業である。多少不正確だが大胆
な説明をするなら、「モデリング」は機能の分析・明確化の作業であり、「設計」は必要な
クラスを選定してそれらのクラス同士の関係をつける作業であり、「実装」はクラスの中
身を作りこんで行く作業となる。以下では、具体的に JASMINE Simulator の設計を見
て行くことにする。
A.4.2 JASMINE Simulator の全体設計
JASMINE Simulator のフレームワークを構築するため、まず前章で示した仕様計算を
行うための、具体的なプログラムを作成してみる。我々が行っている仕様検討の流れは、
光学系のパラメータとして主鏡口径・PSF の特性によるいくつかの数値、検出器のパラ
A.4 JASMINE Simulator の設計–フレームワークの構築
メータとして pixel サイズや pixel 数・full well electron の数・感度など、観測手法のパ
ラメータとして天球上で実際に観測を行うエリアやミッション時間など、サイエンスのパ
ラメータとして目標精度など、約 20 ほどのパラメータを与え、最終的には必要な検出器
の数を計算する。手で入力する 20 ほどのパラメータについては、ユーザーが柔軟に値を
変更できるようにしたい。また、最終結果としての検出器の数だけでなく、計算の途中で
光学系の焦点距離や検出器が見込む天球上の角度など、重要なパラメータで他のパラメー
タから決められる数値があるので、これらの数値をあわせて表示したい。
こういった要求を満たすように作ったテストプログラムの起動画面を、図 A.6 に示す。
ユーザーの入力値変更を支援するために、左側にスライダー (スライドして数値を変更す
る) やコンボボックス (リストで示された数値や文字列などをマウスで選択する) と呼ばれ
る入力ウィジェット (入力を支援するための Graphic User Interface 部品) を配置し、結
果は右側に表示される。この程度の計算であれば、入力値のどれか一つでも変更を受けれ
ば全体を再計算しても、それほど重い計算とはならない。しかしながら、検討が複雑化し
て計算量が増えてくると、変更されたパラメータによって影響を受ける式だけを再計算す
るような機構が望ましい。さらに、新たな検討課題が生じた場合に、同じようなプログラ
ムをいちいち作るのでは、間違えが混入しやすい。できるだけ再利用可能な形でプログラ
ムを構築してゆくことが望ましい。
再利用できるまとまりとして、具体的なものに対応させて検出器・光学系などで括って
おくことが、計算内容をイメージしやすい。例えば光学系をとると、口径・焦点距離・扱
う波長・回折限界などの属性がある。これらのパラメータのすべてが独立であるわけでは
ない。仕様検討においては、口径は利用者が入力可能なパラメータであり、波長は観測要
求から決まるパラメータである。このほか、PSF に由来するパラメータを 2 つ導入して
いるが、これらは本来光学系のデザインが決まれば計算可能なものである。しかしなが
ら、この計算は複雑であるため、現在は手で入力するパラメータとして扱っている。これ
らに対して、回折限界は口径と波長の二つのパラメータから決められるものであり、焦点
距離は、検出器の pixel サイズと観測要求 (回折限界が 2pixel となる) で決めているため、
pixel サイズを与えれば焦点距離を自動的に計算したい。
プログラム全体の整合性を考えた場合は、次のような要求がある。もし光学系の口径が
変更された場合、光学系の焦点距離という属性を利用するほかの部品に対しては、焦点距
離を自身で再計算した後に、焦点距離が変更されたことを通知する必要がある。
計算の中で光学系という部品の入力と出力に注目すると、シミュレーターの全体設計の
中で、シミュレーションに必要な部品が満たすべき条件は以下のようになる。
• 入力可能な属性が複数個有る
• 入力は手で行われることもあるし、他の部品から行われることもある。
• 自身で整合性を確保できる、他の属性がある
• いずれの属性も、他から参照される場合がある。
• 入力可能な属性の一部が変更を受けた場合、自身の整合性を確保した後に、他の部
品に属性の変更を通知する必要がある。
「機能の分析」の章でも見たように、検出器や光学系など JASMINE Simulator に必要な
部品同士の属性値の依存性は検討項目ごとに異なるため、これに柔軟に対応するためにこ
れらの部品に共通の抽象物「モデル」を導入する。上で見た項目は、この「モデル」が持
219
220
付録 A
Simulator の設計
つべ共通の条件であり、「モデル」を具体化した光学系や検出器といったものは、入力可
能なものは何か、属性として持つべきものは何か、属性値同士の関係はどのように規定さ
れるかといった点を具体化することにより、「モデル」を拡張する。
ここで、光学系とか検出器とかといった内容を限定しない「モデル」のレベルの抽象ク
ラスを作る意義は、入力や出力を管理し、依存性グラフ (点を線で結んだものをグラフと
呼ぶ) を描くレベルにおいて必要かつ十分な機能を抽出することにある。実際の計算には
具体的な検出器や光学系といった情報が必要だが、依存性グラフの中では「ここでこのタ
イミングで必要な計算をする」ということが分かっていれば十分であって、その計算の中
身が何であるかは知らなくて良い。そこで、抽象レベルの「モデル」をあらわすクラスで
は呼び出される関数 (メソッド) の名前や型だけが定義されていて、その実態は具体的な
クラスの中で定義される。
今の例は第ゼロ次的な単純な「仕様計算」に限定されているが、実際には様々な検討
を行ってゆかなければならない。そこで、Simulator 全体としては、あらかじめ用意さ
れた部品の属性値の依存性を示す「グラフ」を編集する手段が必要となる。ここで考え
るべきグラフは依存性を示すのであるから A から B へというような方向性を持ってお
り、さらにループを持たないものに限定してよい (情報科学の言葉では、有向非巡回グラ
フ-Directed Acyclic Graph-と呼び、DAG と略す)。編集する機能に加え、構築したグラ
フを保存、あるいは読み込む手段も必要となる。
更に、図 A.6 の例では入力用の部品としてのスライダーやコンボボックス、出力部品と
して文字を表示する機能を提供している。これらは、依存性グラフの始点および終端に位
置しなければならないという点を除けば、検出器や光学系と同じように依存性グラフの中
に現れて、「モデル」の一種と考えてることができる。出力部品はこの例では文字の表示
だけだが、検討のある段階において複数のパラメータの関係を示す折れ線グラフが必要に
なったり、CCD 画像等に対応する画像が必要になる可能性もあり、こういったものへの
拡張可能性を残さなければならない。
さて、上で見た機能を実際にクラス図として構築してみる。こういったある程度汎用性
を意識したライブラリを構築する場合、他のライブラリと組み合わせたときに名前が競
合しないように、クラスの名称にはある種の規則を作るのが一般的である (name space
convention と呼ぶ)。我々は、クラスの名称の前二文字が必ず Js(Jasmine Simulator の意
味) であることとしている。クラス名は内容を表すものが良いので、例えばモデルをあら
わすクラス名は JsModel とするというように、Js の後ろにクラスの内容をあらわす英語
名を付ける。この name space convention は、ライブラリ部分に適用される。即ち、main
ルーチンとして起動時に呼び出されるユーザーインターフェースクラス (JasmineUI) や、
汎用性を意識していない JASMINE 固有のクラス (UniverseModel, OpticsModel など)
の名称に関しては、このルールに従っていない場合がある。
A.4.3 箱の設計–JsContainer/JsScheduler/JsSchedulerItem–
JsModel クラスは実際に計算するためのある程度高機能なクラスである。他のモデル
との間でデータを授受するための機構や依存性通知機構は、抽象クラス JsModel で持っ
てもよいし、そういった機構を持ったクラスが JsModel を保持するという構築の仕方も
ある。一般に、プログラミングの柔軟性を確保するためには、クラスを継承するよりク
A.4 JASMINE Simulator の設計–フレームワークの構築
図 A.7 JASMINE Simulator のクラス図の一部。クラス図の書式は図 A.1 とその
caption を参照。ユーザーインターフェースが JasmineUI というクラスに治めら
れている。JASMINE Simulator のユーザーインターフェースはユーザーインター
フェースの形式によって JasmineCUI クラス及び JasmineGUI クラスとして実装
したが、図では簡単のために JasmineUI クラスとして示した。実際に計算を行な
うための部品は JsModel クラスであるが、JsModel から入出力機能だけを適切に
抜き出すため、JsModel は必ず JsContainer クラスの中に保持されるよう設計され
る。JsContainer クラスは Composite パターンで実装され、JsContainer クラスは
JsScheduler クラスで集約される。JsModel は抽象クラスであり、UniverseModel、
DetectorModel、OpticsModel など、それぞれの機能に応じた具象クラスがサブクラ
スとして構築される。Container 同士の接続には JsConnector クラスが用いられる。
一つの JsContainer からは複数 JsContainer に対する接続がある場合が想定されるの
で、多重度は JsContainer が 1 に対して JsConnector が複数である。JsConnector
は接続だけを表し、実際にその中で交換されるデータの形式については別のクラス、
JsData が担当する。JsData もそのデータ型によって、複数の具象サブクラスを持つ
ことになる。Composite パターンに対する操作は別のクラスである JsProject から行
なわれる。
ラスのメンバーとしてクラスを持たせるほうが優れている場合が多い。そこで、Jasmine
Simulator でもデータ授受機構や依存性通知機構は抽象クラス JsModel の機能として持
たせるのではなく、JsModel を保持する別のクラスが持つように設計する。このクラス
は「モデル」を入れる「箱」としての意味を持つので、JsContainer クラスと名づける。
実際のシミュレーションでは、この「箱」が複数あって、それらが依存性を表す「線」で
つながれている。この「箱」のつながりは、依存性グラフの示す順番に従って順次計算を
行ってゆく必要があり、また依存性グラフの構築においては「箱」を追加したり削除した
221
222
付録 A
Simulator の設計
図 A.8 JsModel の状態図。それぞれの属性が持つ値の違いにまで状態の違いと考え
れば、JsModel は無数の状態を持つクラスである。しかしながら、JsModel の次の側
面に注目すると、JsModel は二つの状態を持つクラスであると考えられる。すなわち、
JsModel は外部から自身の属性の一部の変更を許し、変更が加えられれば一旦属性値
が不整合状態となるが、この整合性を自身で回復する機能をもつクラスである。
り、あるいは「箱」同士を「線」でつなぐなどの操作が必要となる。つまり、複数の「箱」
には構造を構築、保持、変更するなどの高度な機能が必要となり、集約クラスを作る必
要がある。このクラスは、計算全体をスケジューリングするクラスであり、JsScheduler
と名づける。ここに composite pattern を適用すると、集約クラスと Leaf クラスである
「箱」の共通の親クラスが必要となるので、これを JsSchedulerItem と名づける。
A.4.4 線の設計–JsConnector–
「箱」同士を結ぶ「線」は、JsConnector クラスであらわされる。「箱」には入力 (in) と
出力 (out) があり、それぞれが複数の「箱」につながる可能性もあるので、JsContainer の
in 属性と out 属性がそれぞれ JsConnector であり、JsContainer 一つに対して複数 (図で
は*で表示) の JsConnector がつながる。一方 JsConnector 側から見れば、有向線分は終
端を in と out(図ではこれに対応する in と out の名前は示していない) の二つ持つので、
JsConnector の in 属性と out 属性にそれぞれ一つの JsContainer が接続される。
A.4.5 データの設計–JsData/JsDataInt/JsDataArray–
この「線」は「データ」を流すための道である。「データ」の形式は、単純な数値であ
ることもあるが、物理次元などの付加情報を持った数値、pixel データのような複数の数
値の集合など、様々な形式を持つことが想定される。しかしながら、JsConnector はデー
タ形式にかかわらず、データを入力側から出力側へ運べばよい。そのため、JASMINE
Simulator で扱うすべてのデータは JsData という抽象クラスの継承として構築すること
にする。
JASMINE Simulator で扱うデータは、整数、実数、文字列などの基本的なもの、実数
に物理次元の属性を付与したものがある。また、時系列データや pixel などのアレイデー
タのように、これらの集約も考えられる。集約には、今まで何度か出てきた Composite
パターンを使う。また、物理次元の付与には物理次元を取り扱うためのクラスを別に定義
して、Decorator パターンを用いるのが便利である。(Decorator パターンの内容につい
ては [Gamma et al., 1995])
A.5 JASMINE Simulator の実装
A.4.6 モデル (JsModel) の設計
実際に衛星を使った観測をシミュレーションするには、当然のことながら宇宙・光学系・
検出器などの動作を表す細かな機能が必要となる。第 3 章でも述べたように、これらは抽
象的な「モデル」を表すクラスのサブクラスとして実装される。言い換えれば、「モデル」
を具体化したもの、
「具体的なモデル」が必要となる。抽象的な「モデル」は、図 A.7 では
JsModel として表され、具体的なモデルを表す UniverseModel クラス、DetectorModel
クラス、OpticsModel クラスなどはこれを継承して作られる。JsModel は JsContainer
に保持されていて、JsModel のレベルでは適切に情報を受け渡す手段だけを決めておく。
他のモデルとのつながりは、JsContainer が JsConnector を使って処理する。従って、
JsModel は JsContainer との情報のやりとりにだけ気を付ければ良く、他の JsModel と
は直接つながらないので、他の JsModel の構造を知る必要はない。
また、複数の JsModel が情報を伝達するという視点で見ると、例えば光学系において
口径や回折限界、焦点距離などの数値を任意に設定することができるし、こういった状態
を表す値を外部から取得することもできる。JsModel は非常に多様な「状態」を持ち得
る。一方、たとえば光学系の口径を変更すれば回折限界が変化する。属性一つ一つに対し
て個別に外部から変更可能な手段を提供するとすれば、一つの属性だけが変更されれば属
性が不整合な状態が出現する。例えば外部から口径だけを変更されると、状態が不整合な
状態になる。そこで、回折限界を自身によって変更することで、「整合」した状態に戻す
必要がある。すなわち、外部との情報のやりとりという観点で見れば、多様な状態は、図
A.8 で示すように、状態を表す変数の値が「整合している」状態と「整合していない状態」
の二つの状態に単純化できる。値を設定したり取得したりすることを許すのは、「整合し
ている」状態の時だけであり、「整合していない」状態になれば自分自身で「整合してい
る状態」に戻す機能が必要である。
値の整合性を確保する方法は JsModel のサブクラスである具体的なモデルのクラスの
作成者しかわからない。従って、整合性を確保するための関数は、サブクラスの作成者
が実装することになる。JsModel と JsContainer という二つのオブジェクトに分離した
メリットは、この関数がどのようなタイミングで呼び出されるべきかは JsContainer が
管理しているので、具体的なモデルのクラスの作成者はそのことを考える必要がないこ
とである。外部から値を設定する操作は必ず JsContainer を介するので、JsContainer が
値を設定した後から次に JsContainer が値を読み出す前までの間の適切なタイミングで、
JsModel にたいして「値を整合させる」よう指示すれば良い。従って、光学系や検出器な
どを表す JsModel のサブクラスの作成者は、
• どのような値が外部から設定あるいは参照されるのか
• 値を整合するための手段
だけに集中し、それをどのように受け渡し、どのタイミングで実行するのかということを
考えることから解放される。
223
224
付録 A
図 A.9
Simulator の設計
JASMINE Simulator の起動画面。中央に、依存性グラフが表示される。グ
ラフの構築には、左側のウインドーにある部品一覧の表示が利用できる。ここから必
要な部品を持ってきて、中央の画面に置く。選択された部品については、右側のウイン
ドーで属性値を入力することが出来る。ツールバーには、以前に構築したシミュレー
ションのグラフを読み込んだり、編集した結果を保存したり、現在開いている依存性グ
ラフから計算を実行するための機能が割り当てられている。
A.5 JASMINE Simulator の実装
前の章でも説明したとおり、実装段階は設計に則して具体的にプログラムを構築する段
階である。ここでは、必要な機能をどのような形で実現するかについて考える。
編集内容の保存形式としては XML を採用する。編集された生成物 (JASMINE Simu-
lator ではプロジェクトと名付けている) は、「箱」と「線」のつながりを表していて、ど
ういった機能を持った箱かは「箱」の属性として、流れるデータの種類は「線」の属性と
して位置付けることが出来る。こういった構造化されたデータを記述するのに、XML は
非常に適している。
シミュレーションを制御するにはスライダーや選択ボックスといった入力機構が必要で
ある。編集機構を実装すると、編集画面がある。値を入力する場合、編集画面の中の「箱」
を選択すると、この箱に対応する入力可能な値が、適切な入力機構とともに表示されると
いうのが自然である。そこで、図 A.9 に示すように編集画面を中央に、値を設定する画
面を画面右側に配置する。画面左側は、編集をサポートするために、多くの種類の「箱」
が用意されている。出力機構は、必要な場合に新たに画面を開いて出力を行なうようにす
る。出力内容は、単純なテキストで示されるものもあれば、グラフや画像になる場合も
ある。
分散処理の実装にはいろいろ考えられるが、他のシステムとの互換性や標準化動向など
を考慮して、CORBA を採用している。
こういった実装上の便を考慮して、開発言語は java を選択した。java を選択した理
A.6 応用例
由は、
• 大きな計算に使用される標準的な言語の中では他の言語に比較して Objsect 指向
性が優れていること、
• 実行プラットフォームを選ばないこと、
• 描画・ウィジェット・XML 処理・分散処理などに必要な仕組みが提供されている
である。
A.6 応用例
「JASMINE」は、口径 75cm 程度の望遠鏡による位置天文衛星観測プロジェクトであ
る。一方我々は、技術実証衛星として「Nano-JASMINE」を計画している。この Nano-
JASMINE は、日本で初めての人工衛星による位置天文観測である。ESA が 1989 年に
打ち上げた HIPPARCOS は光電管を用いた観測を行ったが、これに続く ESA の計画は
CCD の TDI モードを用いた観測を行うことになっている。Nano-JASMINE は、これに
先駆けて世界で始めて衛星に搭載した CCD の TDI モードを用いた、位置天文観測を行
う。また、現在海外で計画されている衛星による位置天文観測は全て可視光によるものだ
が、日本で計画されている JASMINE は赤外線 (z-バンド、中心波長 0.9µm) を用いる点
が特徴的である。Nano-JASMINE は、JASMINE に搭載予定の z バンドの CCD の小型
のものを搭載する点から、z バンド CCD の衛星上での特性の検証ともなる。また、我々
は JASMINE と Nano-JASMINE の二つの計画を同時に進行させながら、装置のスペッ
クなどを検討している。Nano-JASMINE が検討どおりのスペックを出すことが出来る
かどうかは、JASMINE の検討に不足した点がないことを確認するためにも重要である。
[山田良透 et al., 2007]
Nano-JASMINE Simulator は、この Nano-JASMINE 計画のために、搭載される観測
機器と衛星システムの双方に渡る幅広い機能を、物理量の幅広いダイナミックレンジに渡
り同時にシミュレーションすることにより、Nano-JASMINE の動作を検証し、解析手法
を含めた衛星設計全体に反映し、ミッションフィージビリティーを確認することを目的と
するソフトウエアである。さらに、解析手法を確立し、衛星が打ちあがったときの解析ソ
フトウエアとしてすぐに使用可能なものを予め構築するため、観測模擬データを作成した
り、可能なサイエンスの評価に役立てる役割も持つ。また、ソフトウエアのシミュレー
ターを手元に用意しておくことで、衛星打ち上げ後の予期しない不具合に迅速に対応する
ためのツールとしても用いることが出来る。
我々のシミュレーター構築は、オブジェクト指向技術を用いることにより、必要なパー
ツをモデル化して組み合わせている。このため、単独星、望遠鏡、検出器、オンボードコ
ンピューターなどに相当する基本的なソフトウエア部品を作っている。天文観測は一般に
望遠鏡と検出器を用いて行われ、これらは他のミッションにも利用可能である。即ち、他
のミッションにおいて望遠鏡や CCD 以外のミッション独自の装置を使用する場合でも、
独自の装置のモデル化を適切に行ってソフトウエア部品を追加することによって、シミュ
レーター自身の基本構造と既存のソフトウエア部品はそのまま適用可能であり、幅広い
ミッションに適用可能なシミュレーターとなる。
我々は、兼ねてより「JASMINE」のためのシミュレーションシステムの検討を行なっ
225
226
付録 A
Simulator の設計
てきた [山田良透 et al., 2004, 山田良透, 2004]。JASMINE Simulator の骨格は数値の依
存性を非巡回有向グラフ (DAG) で記述し、このグラフを利用してシミュレーションを行
うものとして報告されたが、本論文で報告される Nano-JASMINE Simulator は、基本的
にこのソフトウエアの枠組みを踏襲している。本実装では、観測に関連する装置の状態変
化を引き起こす原因である光子やノイズなどを「イベント」という形で抽象化し、グラフ
上に「イベント」を流す点が、以前報告された JASMINE Simulator からソフトウエア
の枠組みに機能が追加された部分である。イベントと言う具体物をグラフ上に流すため、
ノードの結合構造は DAG ではなくイベントのソース側に開いた木構造に制限される。ま
た、以前の Simulator では抽象的に扱われていた観測装置の具体的な実装を行った。これ
により、Nano-JASMINE Simulator は衛星システムや搭載機器に対応するいくつかのク
ラスを置き換えることにより、親ミッションである JASMINE の Simulator としても使
うことが出来るものとして設計されている。
本論文では、この Simulator の設計・実装に関わるソフトウエア的な議論と、実際に衛
星設計のための使用が開始されているのでその結果と使用例の報告を行なう。ソフトウエ
アに関する議論では、全体的なソフトウエア設計上の枠組に加え、天文、特に位置天文観
測をサポートするためのソフトウエア部品の具体的な設計と実装、衛星バス部の実装につ
いて述べる。使用例としては、ミッション画像を用いた衛星姿勢制御について紹介する。
A.7 設計および実装
(Nano-)JASMINE Simulator では、観測に関わる装置の状態変化を起こす事象を「イ
ベント」として抽象化している。ここで、イベントとは次のようなものである。
• 天体が発する光子
• TDI 信号
• シミュレーション終了信号
• 視野更新信号
• 検出器により変換された電気信号 (イベントとしては未実装)
• 光学系や検出器に影響を与える放射線などのノイズ (未実装)
Simulator の基本設計は、連続するイベントを時間順序に従って処理してゆくものである。
光学系は天体が発生する「光子」イベントを監視し、イベントが発生すると回折や反射な
どの動作を行ない、検出器は光学系が処理した「光子」イベントが検出器に到着するのを
監視し、露出を行なう。また同時に検出器は TDI 信号を監視し、信号を受けると TDI 動
作を行なうといった具合である。ここで光学系から監視される天体は視野に含まれる天体
に限ってよく、そのため、視野を適切なタイミングで変更し、視野に含まれる天体のリス
トを更新しているのが視野更新信号の役割となる。この他にも、観測に影響を与える宇宙
線やさまざまなノイズは、イベントとしてこの枠組の中で取り扱うことが可能である。
なお、衛星の軌道・姿勢制御擾乱はイベントとしての取り扱いも可能だが、光子に比べ
て時間スケールが非常に長いこと、および衛星システム側とミッション側の開発の独立性
を確保することから、このシミュレーターに含まれるイベント処理とは独立に考慮するこ
ととした。
A.7 設計および実装
現在のシミュレータの構造は、擬似的なイベント駆動型であるが、厳密な意味でイベン
ト駆動型ではない。いわゆるイベント駆動型は外部から与えられるイベントでプログラム
が駆動されるものだが、現実装ではイベント発生源とイベント処理機構を分離しておら
ず、シミュレーター自身がイベントを発生させながらこのイベントを処理しているため、
厳密な意味でのイベント駆動型とは異なる実装となっている。
A.7.1 イベントとイベント処理機構
ミッション系では、天体が発する光子の方向やエネルギーなどの属性を、光学系が反
射・屈折・回折などにより変更し、検出器がこれを受け取って A/D 変換を行うことによ
り最終的に数値に変換することを模擬する機構を実装する。このため、光子やこれが変換
された電気信号などを「イベント」として抽象化し、これを光学系・検出器・オンボード
コンピューターなどイベントを処理する装置を順次通過するというモデル化を行なう。同
じ光子 (あるいはその副産物) が同じ装置を二度通過することは無いと仮定する。この場
合、イベント処理装置どうしはソース側に開いた木構造で結ばれている「ノード」として
記述することが可能となる。本シミュレーターでは、グラフが DAG で書けているという
仮定のもとで、各処理装置ではイベントを発生時刻の順序に処理することが可能であるよ
うな処理を行なう。
ミッション部は、天体から放出される光子を望遠鏡や検出器で検出する機構の実装、お
よびそれに伴う擾乱や誤差の取り扱いである。この実装において、光子および擾乱を「イ
ベント」として抽象化し、望遠鏡や検出器を「イベント処理装置」として抽象化した。こ
こで、イベント処理装置の役割は、上流で発生したイベントを受け取り、処理し、下流の
イベント処理装置に引き渡すことであり、この一連の流れのなかで引き渡されるものがイ
ベントである。
この機構の抽象クラスの基本構造は、図 A.10 に示すとおりである。この機構の最上
位クラスは Observer および Observable であり、これは GoF[Gamma et al., 1995] の
Observer パターンの応用である。設計上は、イベントの処理はその発生だけを担当する
EventSource クラスと、イベントを受け付けて処理を行う EventAcceptor クラスから
なる。EventAcceptor は Observer、EventSource は Observable である。多くのイベ
ント処理装置は、その両者を多重継承した JsEventHandler クラスのサブクラスとなる。
java が多重継承を認めない仕様から EventAcceptor クラスは実装されず、必要なメソッ
ドや属性は JsEventHandler クラスの中で実装されている。実際のイベントの受渡し順
序は、シミュレーション開始時に JsEventHandler クラスの連鎖を定義することで決めら
れる。
イベント取り扱いの設計方針として、イベント処理装置の相互関連に関する取り扱
いおよびキューイングについては図 A.10 に示すように JsEventHandler クラスおよび
JasmineEvent クラスで完結し、イベントの詳細な取り扱いについてはそれぞれのサブ
クラスにまかせる設計となっている。これにより、新たな種類のイベントを追加しても、
Simulator の全体構造に影響を与えること無くソフトウエアが拡張可能となる。
JsEventHandler クラスのサブクラスとしては、天体、光学系 (ビーム混合鏡、望遠鏡)、
検出器、検出器制御装置、データ読取装置などが実装される。検出器制御信号および視野
変更信号は、衛星姿勢と連動するため、このタイミングを衛星バス部から取得したり、バ
227
228
付録 A
図 A.10
Simulator の設計
イベント処理機構のクラス図。EventAcceptor クラスはイベントのキュー
イングと時刻順序への整列を、EventSource クラスは要求に応じたイベントの引き渡
しを担当する。これら両者の特性を継承した JaEventHandler クラスが継承され、光
学系や検出器などのイベント処理装置を構成する。
ス部からタイミングを制御する必要がある。また、画像データは最後のデータ読取装置か
らバス部へ引き渡される。これらは、信号の上流側を Observable、下流側を Observer と
して順次結合され、上流で発生したイベントが順次下流に引き継がれてゆく。この様子を
図 2 に示す。
イベントの処理順序を時間順序と整列するため、イベント処理装置は上流の複数のイベ
ント処理装置からのイベントを蓄え、下流装置からの要求があれば時間順序でこれを引き
渡すためのキューを実装している。また、自身のキューが消費されると、必要なイベント
を上流にとりに行く。キューイングの流れは、図 A.12 に示す通りである。
イベントとイベント処理装置の関係は、イベントが acceptor、イベント処理機構
が Visitor となっている。これは、イベントの受け渡し自体は JasmineEvent および
JsEventHandler クラスのレベルで行いたいが、イベントとイベント処理装置の双方の型
の解決後に実際の処理の内容が決まるため、型解決が必要となるためである。実装は、以
下のようになり、JasmineEvent クラスの具象クラスが処理装置の process メソッドを呼
ぶ際に、自身の型を通知する、GoF[Gamma et al., 1995] の Visitor パターンの応用と
なっている。以下に実例を示す。
class JsEventHandler{
abstract protected void process(ConcreteEvent e);
}
abstract class JasmineEvent{
abstract void accept(JsEventHandler h);
A.7 設計および実装
図 A.11 イベント処理機構の協調図。例では、天体、光学系、検出器の3種類のイベ
ント処理装置の間に順次光子「イベント」が受け渡されて行く様子を示している。「天
体」の位置は BRS 座標系 (太陽系重心基準座標系) で保持されていて、「光子」が「天
体」に保持されている時その位置は BRS 座標系で与えられる。「天体」が視野に入る
と「天体」は「光子」を出す。これが「光学系」に捉えられると、
「光学系」は「衛星」
に位置を問い合わせ、
「光子」の座標を SRS 座標系 (衛星基準座標系、BRS 座標の並行
移動) へ、さらに衛星姿勢を問い合わせて JRS 座標系 (JASMINE 基準座標系、SRS
座標系を回転変換したもの) に変換する。「光学系」は、自身が保持する法線面ベクト
ルと解説パターンの情報をもとに、JRS 座標系で光子の方向と位置を変化させる。そ
の「光子」が「検出器」に捉えられると、
「検出器」が保持する法線面ベクトルをもとに
IRS 座標系 (検出器基準座標系) に変更し、「光子」があたる「検出器」面上の座標値を
計算し、対応する pixel 値を 1 増加させる。座標系の記述については 2.2 章を参照。順
次イベントを処理するため、最終段の「Director」はイベントを順次取り出して行く役
割を持つ。
}
class ConcreteEvent{
void accept(JsEventHandler h){ h.process(this); }
}
鏡が光子を反射し、検出器が光子を蓄積するなどの処理装置個別の処理は、イベン
ト処理装置の process メソッド内で実装される。処理装置が処理しないイベントに対
する process メソッドは、空メソッドとなる。新たな種類のイベントを追加する場合
は、JasmineEvent クラスの子クラスとして新たなイベントを担当するクラスを追加し、
JsEventHandler クラスに抽象メソッドまたは空メソッドを追加しすればよい。NanoJASMINE Simulator では、図 A.13 のようにイベント処理装置を配置する。
229
230
付録 A
図 A.12
Simulator の設計
イベント処理機構の、図 2 に対応するシーケンス図。
「AstroObject」が「天
体」に、「Optics」が「光学系」に、
「Detector」が「検出器」に対応する。
シミュレーションをコントロールするためのいくつかのイベントを発生するため、「観
測モード」と呼ばれる処理装置を作成する。観測モードのイベント処理装置は、衛星のノ
ミナルな回転などの情報から視野更新信号を、シミュレーションを行なう総時間の情報か
らシミュレーション終了信号を生成する。シミュレーション終了信号を検出すると、全
ての処理装置の Observer-Observable 関係は解消される。星 (天体) は Photon を生成す
る。CCD は TDI 信号を生成し、Photon を検出する。光学系は Photon を反射、回折す
る役割を持つ。オンボード処理装置は、TDI 信号を検出すると検出器から 1 カラムを読
みだし、オンボード処理装置に蓄積する。
将来は、星は光子を出すクラスと位置通知イベントを出すクラスに分けられるであろ
う。光子レベルのシミュレーションは、現実をより忠実に反映している反面、計算コスト
ががかかるため、ミッション全体をシミュレーションすることは難しい。そこで、発生す
るイベントを位置通知に置き換えることにより、ミッション全体のシミュレーションに対
応する。
A.7 設計および実装
図 A.13
イベント処理機構のオブジェクト図。Nano-JASMINE をシミュレートす
る場合のイベント処理装置オブジェクトの関係を示す。破線で示されるのが JsEven-
tHandler クラスの Observer-Observable 関係であり、それぞれのオブジェクトは担
当するいくつかのオブジェクトと関連を持ち、処理を行なう。視野が二つあっても、こ
のような結びつけ方をすれば DAG の構造を壊さずに実装可能である。
装置擾乱は、時間スケールが大きくことなるため、本実装ではイベントとして扱わない
こととした。また、検出器や光学系・OBC に対する放射線イベントの影響を取り扱う場
合、これらもイベントとして追加される。
A.7.2 座標
ミッション機器は、自身の姿勢情報や位置情報を得るため、衛星システム側の情報を要
求する。衛星システム側は、要求に応じて Matrix の形で位置情報と姿勢情報を返却する。
光子が光学系と検出器を通過する時間は非常に短いので、観測機器毎に衛星システムに
値を要求ことはオーバーヘッドを上げる。ベンチ等の熱変動と姿勢情報は独立に計算でき
るはずである。また、相対的な位置関係が重要であり、この量の精度に着目すれば、姿勢
情報と熱変動は独立に返却されることが望ましい。
座標系は 3 次元ベクトルとして、座標変換は 3 次元直交行列として表現され、天体観
測のための衛星シミュレーションに用いる座標の種類は非常に多い。天体の位置を表す太
陽系重心座標、衛星の軌道に座標を平行移動した衛星基準座標、衛星機軸に回転変換した
JASMINE 座標、検出器面など装置面に射影された装置座標などがこれにあたる。行列や
ベクトルの演算を利用するため National Institute of Standards and Technology が提供
する Matrix クラス (math.nist.gov/javanumerics/jama/) を利用しているが、それ
ぞれの座標がどの座標であるかを認識し、また演算を安全に行うためには、型付けが便利
である。このために、それぞれの座標クラスや変換行列のクラスは Matrix クラスを継承
している。
231
232
付録 A
図 A.14
Simulator の設計
座標取り扱いに関するクラス図。座標系は抽象クラス CoordinateDirection
クラスに括られており、一方反射や回折などを行なう光学系クラスなどは具象クラスの
Visitor として実装され、visit メソッドを持つ。
Photon が JsEventHandler の acceptor として作用する部分では、Photon の方向の変
化を扱わなければならない。本来なら、Photon クラス内で
newC = c.toJRS(o, this);
setCoord(newC);
としたいところだが、Photon クラスの accept メソッドは抽象イベント処理装置型であ
るため、光学系特有のパラメータを持つ toJRS 関数の特性は使えない。process メソッド
に引き渡された後、JsEventHandler::Optics から JasmineEvent::Photon.setCoord() を
呼ぶ方法も考えられるが、この場合 setCoord() 関数は外部から呼び出される必要があり、
public にする必要がある。setCoord() を package private にするには Photon を optics
パッケージに移動する方法もあるが、他の visitor/acceptor の安全性と矛盾するのでこの
解決は別の危険性を生み出すだけである。座標系を replace するためのメソッドを用意し
て Optics::process メソッド から呼ぶ方法は、replace なら座標の視点を変えただけで意
味は変えないから public にしても安全である。しかし、同様に反射・回折でも座標系の
変更が必要となる。従って、いずれにしても座標を変更する方法が必要となる。そこで、
Photon に diffract や relfect 関数を用意し、Optics からこれを呼び出す仕様を採用する
のが、安全性と利便性から最も適切である。
そこで、座標系の変換に図 A.14 のように Visitor[Gamma et al., 1995] を適用する。
Photon は方向を持っているが、これを抽象化するのが CoordinateDirection クラスであ
る。実際には、BRS(太陽系重心) 座標から軌道情報を用いて SRS (衛星重心) 座標へ、更
に姿勢情報を用いて JRS(JASMINE 基準) 座標へ、さらに焦点距離情報を用いて IRS(装
置基準) 座標へ変換される。これらの変更は必ずこの順番に行われるが、今 Photon が保
持する座標が何であるかを保障するものは CoordinateDirection の具象型だけである。こ
の型を解決するため、visitor パターンを用いている。Optics が visitor、座標が acceptor
となる。この場合は、visitor 側は階層化される必要は無い。
A.7 設計および実装
233
なお、年周視差がゼロである場合のシミュレーションが多用されるため、このクラスに
実装する関数は年周視差がゼロの場合 (距離無限大) に特異にならないよう配慮するべき
である。このため、星の等級も実視等級を保持する。
BRS Coordinate は、位置天文パラメータを用いて以下のように与えられる。
(b, l, π) = (λ + tµλ , β + tµβ , π)
SRS Coodinate は BRSCoord を衛星軌道に平行移動した座標。現在光行差は未実装だ
が、このクラスで対応すべきである。衛星の位置を b、BRS 座標の単位ベクトルを c とす
ると、SRS 座標の三次元座標は
π
b−c
AU
を規格化したものとなる。
SRSCoord に衛星の姿勢を考慮して直交変換したもの。衛星姿勢を現す行列を M、
SRS 座標の単位ベクトルを c として、JRS 座標は
Mc
で与えられる。
JRSCoord を装置面基準に直交変換したものを、IRS 座標として用意する。
これらの他、三次元直交変換を表すクラス、相互に変換する行列クラス、各座標に対応
したベクトルのクラス、位置のクラスなどを用意し、型解決で変換を可能にしておく。
A.7.3 天体および宇宙
天体および宇宙は、composite パターンにより実装される。Leaf クラスとして、現在
SingleStar が実装されている。binary や NEO などを表すクラスを追加実装する予定で
ある。
宇宙モデルは天体の集約として表現される。現在、天体の Leaf クラスは光子を出す。
しかし、光子レベルでのシミュレーションは実際の観測の数倍の時間を要するため、大円
一周程度のシミュレーションは可能でもミッション全体にわたるシミュレーションは不可
能である。そのため、個別の光子ではなく光子の個数と平均位置、分散だけを示すような
Leaf クラスを新たに実装することが望ましい。そのため、集約の生成には builder により
実装される。
宇宙モデルに対して、走査・検索やカタログ生成などは、天体クラスの visitor として
実装される。
天体は、光子イベントあるは位置通知イベントのソースとしての意味を持つ。JsEv-
entSource の直系サブクラスとなる。光子イベントを持つか位置通知イベントを持つか
は、シミュレーションの粒度により選択される。
宇宙は天体の collection クラスとして実装される。構造を表現するクラスの構造は図
A.15 上に、構造を生成するクラスの構造は図 A.15 の下に示す。
collection クラスである宇宙モデルの生成は、Builder および Factory を用いて実装す
る (図 A.15 左)。天体は、異なる種類のイベントに対して異なる具象クラスを持つ。従っ
て、Factory クラスは Abstract Factory[Gamma et al., 1995] で実装する。
234
付録 A
図 A.15
Simulator の設計
天体を表すクラス。個別の天体として、現在 SingleStar クラスが実装されて
いる。宇宙モデルや視野内に入る星などの天体の集約クラスとして、AOCollection ク
ラスが実装されている。これは、Composite パターンの応用である。これらを生成す
るための Builder くらすおよび処理を行なうための Visitor クラスが別途存在する。
走査は Visitor[Gamma et al., 1995] クラスが担当する (図 A.15 下)。光子イベントを
用いる場合に視野に入るかどうかを判定する方法、および位置通知イベントを用いる場合
に観測時刻を返す方法は、Visitor が内部クラスとして実装する。
A.7.4 定数
定数は、インターフェース内で static final で記述されている。
A.7.5 入出力
天文データの入出力として、fits フォーマットを実装している。現実装では simple fits
のみに対応しているが、設計上は normal fits への拡張を考慮している。
また、複数種類のシミュレーションを実行したり、それぞれのシミュレーション独自の
パラメータを入力するための GUI、画像を画面に出力する機構を実装する。
FITS を扱うクラスは、構造を表すクラス (図 A.16 下にクラス図を示す) とこれを生成
するためのクラス (図 A.16 上にクラス図を示す) からなる。
A.7.6 視野
実際には、観測にかからない多くの方向に光子が放出されている。しかし、これらを
全てシミュレーションすることは非現実的で、見えるものだけを予め select する必要が
ある。
まず、装置側からみた視野は、装置の視野情報を用いて観測対象となる星を選択する形
で行われる。
逆に星側から見た装置は、自ら放出する光子の頻度を決めるため、視野の大きさに関す
る情報を知っている必要がある。
A.7 設計および実装
図 A.16 FITS の生成を行なうクラス (上) と構造を表すクラス (下) から成る。
A.7.7 パラメータ
ここで言うパラメータは、解析・推定されるものである。パラメータセットと推定手法
を組み合わせて一つのクラスとして実装する。推定アルゴリズムを樹柔軟に変更するた
め、アルゴリズムについては Strategy[Gamma et al., 1995] パターンを適用するべきで
ある。
A.7.8 ミッション系とバス系の結合
ミッション系からバス系を制御する必要は無いが、シミュレーションにおいてはミッ
ション系は衛星姿勢を知る必要がある。そこで、バス系の衛星は AbstractSatellite クラ
スを継承した具象クラスを持ち、ミッション系から姿勢情報などを得るためのメソッドを
実装する必要がある。
一方バス系からはミッション系に対する制御信号が送られる。これは、実際の衛星の場
合はミッション OBC を介して行われるものである。このクラスは Obdh クラスで実装
される。
235
236
付録 A
Simulator の設計
図 A.17 Simulator バス部のシステムブロック図
即 ち 、ミ ッ シ ョ ン 系 側 は Obdh ク ラ ス 、バ ス 系 は AbstractSatellite ク ラ ス が
Facade[Gamma et al., 1995] になっている。双方が相手の具象クラスを持たなければな
らないので、次の手順でこれを行う。
1. バス系のクラスをインスタンス化する。
2. ミッション系のクラスのインスタンス化で、バス系クラスを引き渡す。
3. バス系クラスのインスタンス sat において、sat.setObdh(o::Obdh) を呼び出すこ
とにより、バス系にミッション系の Facade クラス情報を与える。
A.7.9 バス部実装機能
Simulator バス部の実装機能について述べる。Simulator は衛星のフィージビリティー
確認だけでなく、衛星打ち上げ後の挙動解析、不具合対策にも用いることを想定している
ため、一般的な衛星の姿勢運動、軌道運動だけでなく、各種コンポーネントレベルまで
詳細に記述する必要がある。図 A.17 に Simulator バス部に実装される機能のシステムブ
ロック図を示す。Simulator 内部では図 A.17 のシステムブロック図に記されたクラスご
とに実装されている。
A.7 設計および実装
衛星の軌道運動
衛星の軌道運動は Orbit クラスとして処理される。Orbit クラスは BRS(太陽系重心)
座標を基準として記述されており、地球の扁平性に基づく軌道運動学を取り扱う。ミッ
ション系から位置情報の要求があった場合には、軌道六要素により定まる衛星の位置情報
を、インターフェイスを介してミッション系に返却する。また、解析手法の確立や観測
模擬データの作成のために、GPS 受信機の動作を模擬した位置情報取得クラスが実装さ
れる。
衛星の姿勢運動
Satellite クラスは衛星の動力学と運動学に関する部分を処理する。衛星の状態量は衛星
姿勢角を示す Quaternion と角速度を用いて記述されており、それぞれの微分方程式を数
値積分によって解くことで状態量の更新を行う。
衛星コンポーネント
衛星コンポーネントはセンサである STT(Star Tracker)やアクチュエータの RW
(Reaction Wheel)といったハードウェアと、OBC(OnBoard Computer)によるソフ
トウェア処理部分からなり、それぞれの機能ごとのクラスに分けられ実装されている。ま
ず、センサクラスには地球センサ、ジャイロ、地球センサ、磁気センサ、恒星センサ、太
陽センサが実装されており、それぞれのコンポーネントに関して精度や更新周期などのパ
ラメータを設定できるようになっている。フィージビリティスタディの際には搭載を考え
ているセンサのパラメータを代入することで、搭載の可否を決定することができる。つぎ
に、フィルタクラスでは各種センサより得られる情報から、より正確に衛星の状態量を推
定するために、最尤推定法の一つであるカルマンフィルタによる姿勢推定フィルタが実装
される。コントローラ、アクチュエータクラスでは、フィルタクラスによる状態量推定結
果を用いて制御トルクの指令値の計算を行い、アクチュエータの運動学、伝達特性を考慮
した上で Satellite クラスへ制御トルクを返す機能が実装されている。Nano-JASMINE
のように極めて高い姿勢安定度が要求される衛星ではセンサやアクチュエータの選定だけ
ではなく制御則も十分に検討する必要があり、コントローラクラス内部を書き換えること
で各種制御則の適応の可能性について検討することができる。最後に、電源、通信、地上
局、温度、構造については、衛星−地球−太陽の幾何学的関係から、通信可能時間の算出、
衛星内部の温度状態の時間変化、電力収支の確認を行う昨日が実装される。これらのクラ
スの実装により、打ち上げ−運用−解析といったプロジェクト一連の流れをシステムレベ
ルで詳細に検討可能な Simulator となり、概念検討のみならず,観測模擬データの作成や
打ち上げ後の不具合対策にも使用可能な汎用的 Simulator として用いることができる。
A.7.10 バス部実装
バス部実装概要
Nano-JASMINE シミュレータにおいてバスシステム側のシミュレータは次の機能を
担う。
• 衛星の運動方程式を解くことで、ミッション側から要求された時刻における衛星の
237
238
付録 A
図 A.18
Simulator の設計
Simulator バス部の UML 図
位置情報、速度情報、姿勢情報をミッション側シミュレータに渡す。
• 衛星に搭載される ADCS 機器をモデル化し、各種センサー出力から衛星の状態量
を推定し、各種アクチュエータを用いて衛星の姿勢や温度を制御する過程を模擬
する。
ミッション側シミュレータとバスシステム側シミュレータは開発の独立性を高めるため
に、両者の間のインターフェイスは最小限にとどめてある。また、ここで Nano-JASMIN
用に開発されたシミュレータの基本構造を将来 JASMINE シミュレータに容易に転用で
きるようにするため、JAVA のオブジェクト指向性を利用して汎用性のあるフレームワー
クを構築することが望ましい。
クラス関係
Parameter クラスと Status クラス Parameter クラスはシミュレーションに必要と
なる基本定数(物理定数や衛星の質量など、シミュレーションを通じて値が変化しないも
の)を主に public final のアクセス修飾子で記述している。一方 Status クラスはシミュ
レーションを通して絶えず変化する値(衛星の姿勢や温度などの状態量)を保持し、これ
らをカプセル化している。これら2つのクラスはともに Singleton[Gamma et al., 1995]
を実装したコンストラクタを持ち、それぞれシミュレーション全体を通じてオブジェクト
は常に1つだけ存在する。Parameter オブジェクト内の変数を final で宣言することによ
り、これを利用するクラスが不用意に定数の値を変更する事を防いでいる。同様に Status
オブジェクト内の変数を private で宣言することでカプセル化し、一定の手続きに従わな
い限り状態量の更新が許されないようにすることで、意図しない箇所から値が変更される
ことを防いでいる。これらのオブジェクトを Singleton にすることにより、次のメリット
A.7 設計および実装
があると考えられる。
• 状態量を保持したオブジェクトが複数存在すると、状態量を変更する際にすべての
オブジェクトにアクセスしなければならず、間違いが発生しやすくなる。オブジェ
クトが唯一であることを保証することでこういった間違いをなくすことができる。
• ともに大きなメモリ領域を必要とするオブジェクトであるため、シミュレーション
中に何度も生成と消滅を繰り返すことがあると計算負荷になる可能性がある。
SetStatus クラスカプセル化された Status クラス内の状態量を更新するためには更新
後の状態量を SetStatus 型のオブジェクトに格納して、これを Status クラスに渡す必要が
ある。実際には状態量の種類ごとに、抽象クラス SetStatus を継承した OrbitValueSetter
(軌道に関する状態量の更新値を保持)や PowerValueSetter(電力に関する状態量の更新
値を保持)などにまとめられ、Status クラスへ渡される。すなわち SetStatus クラスはフ
レームワークで OrbitValueSetter や PowerValueSetter は実装であるといえる。
OrbitValueSetter や PowerValueSetter などの SetStatus クラスを継承したオブジェ
クト群は、以下に述べる StatusUpdater クラスを継承したクラス群(それぞれ軌道に関す
る状態量や電力に関する状態量などを計算するモジュールである)によって生成される。
StatusUpdater クラス本シミュレータでは、あらゆる変数(姿勢の真値を表す変数
群、温度を表す変数群、各種センサー出力を表す変数群、姿勢推定値を表す変数群など)
は Status オブジェクトに保持されており、これらを更新する一連の流れはすべて同じ枠
組みの中で行われる。
たとえばこれらの変数のうち軌道情報に関する変数群を更新したい場合、抽象クラス
StatusUpdater クラスを継承した Orbit オブジェクトを用いる。StatusUpdater は抽象
メソッド execute() を持っているので Orbit クラスも execute() メソッドをオーバーライ
ドしなければならない。実際の軌道要素を計算するロジックはこの execute() メソッド
に記述する。また抽象メソッド execute() は抽象クラス SetStatus を返り値にとるように
指定してあるので、Orbit クラスでオーバーライドした execute() メソッドも SetStatus
クラスを継承した何らかのオブジェクトを返さなければならない。このときに Orbit の
execute() メソッドでは、SetStatus クラスを継承した OrbitValueSetter オブジェクトを
生成し、軌道要素の計算結果を格納して返すようにする。
同様に衛星の姿勢に関する変数群を更新する場合には Satellite クラスの execute() メ
ソッドを用い、計算結果を SatValueSetter オブジェクトに格納して返すようにする。他
のあらゆる種類の変数についてもこの更新方式で統一する。このように変数の更新方式を
統一することで次のメリットがあると考えられる。
• プログラムの再利用性を高める。
各変数群を更新する計算モジュール(Orbit、Satellite、Power、etc.)を実行し変
数の更新を行うのは AbsUpdaterFactory クラスであるが、AbsUpdaterFactory
クラス内の記述ではその計算モジュールの実態にかかわらず、その上位クラスのみ
を用いて「StatusUpdater オブジェクトを生成して execute() メソッドを実行し、
返ってきた SetStatus オブジェクトを Status オブジェクトに渡す」といった抽象
的な記述が可能となる。これによりあらゆる状態量更新の手続きで同じコードを共
有することができ、この部分での間違いをなくすことができる。
239
240
付録 A
Simulator の設計
• さまざまな実装方法が可能である。
StatusUpdater、SetStatus などの抽象クラスをフレームワークと見ることによっ
て、シミュレータに新たな変数群を加える場合にも、これらの抽象クラスを継承す
ることによって、信頼性の高い既存のコードを利用することができる。このような
拡張性は Nano-JASMINE シミュレータを JASMINE シミュレータに拡張する場
合などに有効であると考えられる。
AbsUpdaterFactory クラス上述の Orbit オブジェクトや Satellite オブジェクト
などを生成し計算モジュールである execute() メソッドを実行するのは、抽象クラス
AbsUpdaterFactory を継承した OrbitUpdaterFactory や SatelliteUpdaterFactory であ
る。こういった具象クラスの共通部分を上位クラスである AbsUpdaterFactory に記述す
ることで、上述のように「StatusUpdater オブジェクトを生成して execute() メソッドを
実行し、返ってきた SetStatus オブジェクトを Status オブジェクトに渡す」といった抽
象的な記述が可能となる。これが AbsUpdaterFactory クラスの第一の機能である。
AbsUpdaterFactory クラスのもう一つの機能は、Orbit オブジェクトや Satellite オブ
ジェクトなど個々の計算モジュールを実行するかどうかの判定である。ミッション側では
光子を一つのイベントとしているが、これはバスシステム側のシミュレータとしてはイベ
ントの間隔が短すぎる。したがってバスシステム側のシミュレータはイベントごとに毎回
計算モジュールを起動せず、ミッション側のシミュレータが要求してきた時刻がある程度
進んだ段階で次のステップを計算することにする。各計算モジュールの実行ステップ間隔
を何秒にするのが適切かについてはモジュールごとに異なるので、AbsUpdaterFactory
の具象クラスである OrbitUpdaterFactory や SatelliteUpdaterFactory に steptime とし
て記述する。バスシステム側の計算実行間隔はミッション側のイベント発生間隔よりもか
なり長いが、要求されてきた時刻における状態量を算出する場合には、その時刻の前後の
ステップでの計算結果を直線近時で内挿した値を返すことにしてある。この機能を実現す
るために、Status は過去の数ステップの状態量を記憶しておく StatusHistory 型のオブ
ジェクトを保持している。このオブジェクトの linearlize() メソッドにより内挿計算が実
現される。
実際に計算モジュールを実行するのは抽象クラス AbsUpdaterFactory を継承した
OrbitUpdaterFactory や SatelliteUpdaterFactory などであるが、以上の機能は各計算モ
ジュールで共通なので、上位の AbsUpdaterFactory クラスに記述してある。
GetStatus クラスこれがミッション側にとってバスシステム側にアクセスする唯一の
インターフェイスとなるクラスである。ミッション側シミュレータはこのクラスをイン
スタンス化したオブジェクトを常に保持しており、メンバ関数である getPosition(double
t)、 getVelocity(double t)、 getAttitude(double t) により、それぞれ衛星の位置情報、
速度情報、姿勢情報を取得する。それぞれの関数ではまずはじめに引数として渡された時
刻から判断し、その時刻の状態量をミッション側に返すために必要な最小限のステップだ
け計算ステップを進める。上述のようにこのときのステップ幅は、各計算モジュールごと
に異なっている。この後、各計算ステップの間を直線近似で線形補完して、任意の時刻に
対する状態量をミッション側に返している。
さらに GetStatus クラスはミッション側の AbstractSatellite クラスを継承しているの
で、ミッション機器の状態量も参照することができる。Nano-JASMINE ではミッション
A.8 コード開発上の既約など
系の CCD データをもとにバスシステム側が姿勢を制御するので、このことは特にバスシ
ステム側がミッション系の保持する星像データを参照するときに利用される。
処理の流れ
以上はバスシステム側シミュレータの各クラスの機能について説明であるが、ここでは
具体的にデータ処理の流れを示す。
1. まず、バスシステム側のシミュレータは、ミッション側シミュレータにより GetStatus クラスの3関数 getPosition(double t)、 getVelocity(double t)、 getAttitude(double t) を呼ばれるところから始まる。
2. 各計算モジュールに対応する UpdaterFactory をインスタンス化する。すなわち
OrbitUpdaterFactory、SatelliteUpdaterFactory などを生成する。これらのメン
バ関数である getNewStatus() を時刻を引数に実行することで、その時刻の状態量
をミッション側に返すために必要な最小限のステップだけ計算ステップを進める。
具体的には、バスシステム側のシミュレーションが、ミッション側から指定された
時刻まで達していないとき、getNewStatus() は true を返し続けるので、この返り
値が false になったことで計算が完了したことを判断している。
3. 要求された時刻まで既に計算が完了している場合、getNewStatus() は、ただ false
を返すだけであるが、完了していない場合、getNewStatus() の内部で相当する計
算モジュール(Orbit,Satellite など)を生成し、結果を Status に格納する。
4. Status に格納されているすべての変数群が最新の状態になったら、StatusHistory
の linearlize() メソッドを実行して、線形補完された状態量を返す。
各計算モジュールの概要
Comm 通信に関する状態量を更新する。
Controller 姿勢制御命令に関する状態量を更新する。
Disturbance 衛星の姿勢外乱に関する状態量を更新する。
Filter 衛星の状態量を推定するカルマンフィルターに関する状態量を更新する。
Orbit 軌道に関する状態量を更新する。
Power 電力に関する状態量を更新する。
Satellite 姿勢に関する状態量を更新する。
SunSensor,STT,MagSensor,Gyro それぞれ太陽センサ、スタートラッカ、磁気センサ、
ジャイロに関する状態量を更新する。
SunShine 日照に関する状態量を更新する。
Temperature 温度に関する状態量を更新する。
A.8 コード開発上の既約など
A.8.1 動作環境
Java 1.5 以上および ant の環境に対応している。また、Eclipse にも対応している。こ
れらが動作する環境では動作する。行列演算のための Jama ライブラリについては、提供
241
242
付録 A
Simulator の設計
されているライブラリは Java 1.5 対応だが、ソースファイルをツリーに組み込むことで
Java 1.4 にも対応出来るよう配慮する。一部の関数の使用法が Java 1.3 には未対応であ
る。Java 1.4 については可能な限り対応する方針で開発をすすめる。
現在確認されている動作環境は、Windows XP Professional SP2 上の Java 1.5、および
Debian Linux 上の Java 1.4、いずれも Intel CPU 環境での動作を確認している。Eclipse
に関しては Eclipse 3.1 の Windows XP Professional 上での動作を確認している。
A.8.2 コードコンベンションその他
日本語 (非 Latin 1 文字) を用いる場合は、utf-8 を用いるものとする。
Sun Java Coding Conventions
(http://java.sun.com/docs/codeconv/html/CodeConvTOC.doc.html) に従う。
トップディレクトリーには src ディレクトリー、build.xml ファイル、ChangeLog ファ
イルを置く。doc にはドキュメントを、lib には結合するライブラリを置く。ThermalLib
は熱関係のファイルを保管する。また、report, doc, build, META-INF, dist, CVS,
.settings の名称は、ant・cvs・Eclipse が使用するディレクトリー名称なので、ユーザーが
この名称でファイルまたはディレクトリーを作成してはいけない。パッケージ名は、src
ディレクトリーをトップにした名前に統一する。
物理量を表現する短精度および倍精度実数型変数の値は、表示のためなど特別の理由が
無い限り SI 単位系での値であると仮定する。また、角度は特に理由が無い限り radian と
する。これに関して例外を設ける場合は、ソースコード中のコメントに必ず使用した単位
系を、理由とともに明記する。
A.8.3 評価、今後の課題、展望
• 検出器のノイズなどの適切なモデル化
• 現実的な PSF の導入や、視野の場所による PSF 形状の違いなど、光学系の詳細な
モデル化
• 視野内に入る天体のサーチの高速化⇒天体を階層化
• 全ミッションスケジュールのシミュレーションに向け、位置通知イベントを持つ星
の実装
• ObservationMode をミッション部全体の builder[Gamma et al., 1995] クラスに
する。
• 複数の検出器を同時に搭載する場合に対応した検出器クラスの階層化
• 解析手法を組み込む
• 熱構造モデルの実装
シミュレータの高速化現状、計算時間が実時間の約 100 倍掛かっている。この原因とし
て以下の項目が考えられる。
• シミュレータ内のいたるところで Jama.Matrix クラスが多用されているため。
Matrix の初期化に計算時間が割かれている。
• バスシステム側シミュレータは新たなステップを計算するかどうかを判断すると
A.9 動作例
図 A.19
243
制御前の星像イメージ。衛星搭載の標準的なセンサーの情報だけから姿勢制
御を行なった場合、衛星姿勢は十分な精度が得られず、回転速度や軸方向がずれている
ために、斜めに伸びたようなイメージとなる。
きに AbsUpdaterFactory を継承した個々の UpdaterFactory をインスタンス化し
なければならない。ミッション側のイベントの発生する間隔は、バスシステム側の
計算ステップ間隔よりもかなり短いため、ほとんどの場合新たな計算を実行する必
要がない。にもかかわらず毎回 UpdaterFactory をインスタンス化するのは大きな
オーバーヘッドになっていると考えられる。
1 度に必要なシミュレーション時間はバス側で 200 分、ミッション側では数年である。そ
のため、バス向けには引き続き現在の精度のシミュレータをハードウェアとソフトウェア
の面から高速化することで対応し、ミッション向けには簡易高速版の開発を行う。
シミュレータを開発しつつ、Nano-JASMINE の概念設計に適用することで、頑健な制
御則の開発、衛星パラメータの感度解析などの設計作業が行われている。
A.9 動作例
本シミュレーターはミッション全体に渡り多くの目的に使用される予定だが、緊急性を
要する課題として、ミッション画像を用いた姿勢制御の可能性を検証する問題がある。位
置天文観測は、通常衛星の姿勢を知るために使われる恒星の位置そのものを測定するミッ
ションであり、そのためには衛星に通常搭載されるセンサーよりはるかに高精度の姿勢安
定性が要求される。このレベルの姿勢擾乱を検出できる装置として最も有効なのは、ミッ
ション側の望遠鏡である。そこで、ミッション側の望遠鏡の画像を処理することで、衛星
姿勢のノミナル値からのずれを推定し、微弱な制御をかけて、ミッションが目標とする姿
勢に落しこんで行く手法を考えているが、この方法が本当にうまく行くかどうかについて
検証を行なう必要があった。
244
付録 A
図 A.20
Simulator の設計
制御の様子。軸の動く速度のノミナル値からのずれを示す。上が x、下が y 、
ゼロで示された直線は回転速度成分 z を示す。回転速度成分は、衛生姿勢制御ではな
く TDI 速度の変更で制御されるため、この図では常にノミナル値であるように示され
ている。x および y 成分は、微小なトルクを発生して制御を行なう。画像からは、ずれ
の絶対値は推定可能だが符号は推定不可能なため、制御を行なった結果を見て制御を行
なった方向が正しいかどうかを判定し、さらに制御を続ける。約 500 秒程度の間に制
御が完了し、撮像に十分な姿勢精度に達していることが分かる。
衛星に搭載するセンサーで追い込んだ衛星の運動状態では、図 A.19 の状態の画像が得
られる。回転速度や回転軸がノミナル値と若干ずれているため、星像は図のように歪んだ
ものとなる。
そこで、この歪みを推定し、ずれを定量化して、制御をかける。制御の様子は図 A.20
のように、微弱なトルクを発生することで衛星の回転軸や回転速度を制御する。得られて
いる画像は約 8 秒程度積分されたものであり、画像からずれを推定する手法をとる限り、
ずれの絶対量を推定する可能性はあるが、ずれの符号を知ることは出来ない。すなわち、
例えば星像が画面の左下から右上に延びている場合、星が画面の左下から右上へ移動した
のか右上から左下に移動したのかを知ることは出来ない。そこで、本制御では、最初にず
れの符号を仮定して制御を行ない、この結果画像がより良質のものになるなら同じ方向へ
制御をかけ、画像が更に悪化するならあらためて逆符号の制御をかけることにより、制御
を行なっている。この例では最初の符号推定が誤っていたため、図 A.20 では一度悪い方
向に推移し、後にゼロ付近に収束している。この数値実験では、符号情報が不定のまま制
御を行なっても、500 秒程度でほぼ期待通りの姿勢に追い込むことが出来ることを示して
いる。
A.10 まとめ
図 A.21 制御後の星像イメージ。最初の斜めに伸びたイメージから、期待するおよそ
5 × 9pixel 程度に広がった、まっすぐなイメージが得られる。
その結果、図 A.21 のような画像が得られ、ミッション画像を用いた姿勢制御が可能で
あることが、このシミュレーターを用いて検証された。
A.10 まとめ
我々は、従来の JASMINE Simulator の抽象的枠組みを発展させて、より具体的な観
測を模擬するための Nano-JASMINE Simulator を開発した。観測装置の状態を変化さ
せる要因として、光子だけでなくさまざまな制御信号やノイズなどを「イベント」という
抽象化で統一的に扱うことで、観測の模擬が容易になった点が、本シミュレーターの新し
い点である。Nano-JASMINE の特徴として、衛星搭載姿勢センサーでは十分な姿勢安定
度を達成できず、ミッション画像を用いることが必要となる。この「ミッション画像の処
理による衛星姿勢制御」の可能性はミッションフィージビリティーに係わる重要な点で、
この検証をシミュレーターを用いて行ったので、このシミュレーターの動作例として示
した。
Nano-JASMINE は、2008 年の打ち上げを目指している。このため、現在の 1 万秒程
度までのシミュレーションに加えて、約 1.5 年のミッション全期間のデータを集めて十分
な精度を出せるかどうかの検証まで含めて、早急に行う必要が在る。そこで、今後はより
現実的な誤差要因を採り入れたシミュレーションシステムに改良し、全体の解析精度の評
価、予期しない問題が発生した場合の対処方法などの検討に役立てられるよう、改良され
る予定である。
245
246
付録 A
Simulator の設計
A.11 謝辞
本研究では、IBM 東京基礎研究所の宮下尚氏にもアドバイザーとして加わって頂き、大
変有益な意見を頂いた。また、この研究は、国立天文台共同研究及び文部科学省科学研究
費補助金基盤研究 (B)(2)(課題番号 15340066)、並びに東レ科学技術研究助成金によるサ
ポートを受けたものである。
A.12 用語集
ここでは、本稿に用いられている専門用語に関して、カテゴリーに分けて簡単な解説を
与える。
A.12.1 情報技術・データ解析技術
プログラミングのスタイルや技法、プログラミングのためのプロジェクトにおける既約
などに関する用語は以下のとおりである。
イベント駆動型プログラム
起動するとともにイベントを待機し、起こったイベントにし
たがって処理を行なうプログラミングスタイルを言う。通常の GUI プログラミン
グはマウスやキーボードからのイベントを処理するイベント駆動型で書かれる。
キューイング
送信すべきデータをいったん保管しておき、受信側の処理の完了を待たず
に次の処理を行なう処理方式。
コードコンベンション
タブの数とか改行の方法、大文字と小文字の使い分けなど、コー
ドを見やすくするために規約を設けることがある。この既約を言う。
JAVA オブジェクト指向言語の一つ。
ant
JAVA の自動ビルド機能を提供する。apache グループのオープンソースソフト
ウェア。
Eclipse JAVA の統合開発環境の一つ。オープンソースソフトウエア。
Jama National Institute of Standards and Technology が提供する、行列演算用の Java
ライブラリ
Windows XP OS の一種、MicroSoft 社の商標。
Debian Linux OS の一種
utf-8 文字コードの一種。世界中の多くの文字種を計算機上で統一的に表現しようとす
る Unicode という動きがあり、この枠組の中で日本語を 16bit で表現するような
表現の一種。日本語には従来から Shift JIS、EUC-JP、ISO-2022-JP(JIS コード)
など多くの文字コードがあるが、そういったものの一種だと考えて良い。utf-8 は
Java で標準でサポートされている。
非 Latin-1 文字 アルファベットにウムラウトやアクサンターギューがついた文字などを
集めた ISO-8859-1 に規定される文字セットを Latin-1 文字と言う。欧米系の文字
は、アスキーコードと Latin-1 文字を合わせてすべて 1 バイトで記述できる。日本
語を含む、この枠に収まらない文字種を総称して、非 Latin-1 と呼ぶ。
cvs
concurent versions system の略、サーバークライアント形式で動作するバージョ
A.12 用語集
247
ン管理システムのオープンソースソフトウエア。
データ解析やデータフローの表示方法については、以下の用語が使われている。
カルマンフィルター
フィルター
フィルターの一種。1960 年、カルマン氏により提唱された。
時系列観測データからの状態パラメータ推定において、現在までの観測デー
タをもとに状態パラメータを推定する方法。現在と離れた過去のある時点以前の観
測データから現在の状態を推定する方法を prediction、現在を含む過去から未来ま
での観測データを元に現在の状態推定する方法を smoothing と呼び、状態推定は
prediction、filtering、smoothin の三つに分類される。
DAG Directed Acyclic graph、有向非巡回グラフの略。複数のものの関係をノードと
線で表現する方法を、グラフと呼ぶ。このグラフの中で、線が向きを持っていて、
かつこの向きにしたがって線をたどった時に巡回するものがないようなグラフを
DAG と言う。
A.12.2 オブジェクト指向プログラミング
本稿では、「オブジェクト指向」技術を用いたコード開発を紹介している。オブジェク
ト指向の概念は、以下に示される。
オブジェクト
現実のものを計算機上で表現するもので、オブジェクト指向プログラミン
グではプログラムの基本要素となる。計算機の上でのオブジェクトの役割は、「状
態」と「振舞い」をもつものと規定される。状態は、たとえば装置が ON になって
いるとか OFF になっているとか、より複雑な装置では多数のモードを持っている
うちのどのモードになっているかというようなことを表す。振舞いは、パルスが一
つはいってくると「1」を、二つはいってくると「2」を返すというような、動作
を表す概念である。
メソッド (操作)
オブジェクトの振舞いを表すもの。プログラム上で具体的なものの動
作を表す場合、必要に応じて外から与えられた情報に基づいて自身の状態を変更し
たり、必要な計算を行なって値を返す必要がある。こういった動作は、プログラム
上は関数を作成して行なう。
属性
オブジェクトの状態を表すもの。プログラム上は、変数に適切な値を保持すること
で、属性を表現する。例えば装置などの「もの」の大きさや重さ・位置、物性値な
どを表す属性がある。
クラス
実世界では、同じ種類の多くのオブジェクトが存在する。このオブジェクトの設
計図、あるいは雛型をクラスと呼ぶ。クラスから見ると、個々のオブジェクトは
「インスタンス」(実例) と呼び、雛型であるクラスからオブジェクトを作ることを
インスタンス化と呼ぶ。例えば C 言語や Fortran 90 では構造体と呼ばれる複数の
変数を一括りにまとめて一つの変数のように扱う方法が使えるが、構造体の型定義
がクラスに対応する。一方、プログラムの中には実際に同じ構造体に対応する複数
の変数が存在するが、これらの各変数がオブジェクトに対応する。
抽象クラス
それ自身はインスタンスを作れず、このクラスから継承されたクラスだけが
インスタンスを生成することが出来るような、特別のクラスを導入する方が、プロ
248
付録 A
Simulator の設計
グラムがきれいにまとまることがある。このような特別なクラスを呼ぶ。
::
JasmineEvent::Photon.setCoord() などと書いた場合、Photon クラスのインス
タンスがメソッドを実行するが、実際には Photon クラスの親クラスである
JasmineEvent クラスでそのメソッドを定義していることを表す。
また、オブジェクト指向言語とは言語仕様として以下の機能を持った言語を言い、これ
らを使って現実の系を計算機上に再現して行く。
抽象化
対象を計算機上のオブジェクトとして表現するのに必要なデータ (属性) を一括
りにすること。例えば星を表現するのに必要な光度、色指数、半径、質量といった
データを一括りに扱って、「星」という概念を構築することができる。
カプセル化
属性とメソッドの組を作ることによって、あるデータを扱うための手続きが
プログラム全体に散在することを防ぐ。また、オブジェクトの状態を変更するため
の内部的な手続きを隠して、外部からは決められた手段によってのみ変更可能であ
るようにすることで、情報を隠蔽する。例えば測定装置のスイッチを入れるた場
合、内部的にはどの回路にどの順番で電流を流すといった複雑な手続きがあるが、
外からは「スイッチを押す」ということしか見えないようにすることで、装置は使
いやすくなる。装置を「使えない」状態から「使える」状態に変更するには、これ
で十分である。
継承
抽象化・カプセル化されたデータと操作の組の性質を、他の同様なデータと操作の
組に受け継ぐ機構を持つこと。例えば、変光星は星の全ての性質を持っており、さ
らに変光周期などの変光星独自の性質を持つ。つまり、プログラミングの上では
「変光星」は「星」を継承して作ることが出来る。「変光星」クラスは「光度を取得
する」など「星」が通常持っているほとんどのメソッドを使うことが出来る。更に、
「変光周期を取得する」など変光星独自のメソッドを追加することが出来る。通常
の「星」と「変光星」で共通するメソッドは、これを呼び出す側は相手のオブジェク
トが「星」のインスタンスか「変光星」のインスタンスかを意識する必要がない。
多相性
クラスが継承された場合に、同じ名前のメソッドで内部的に異なった処理を行な
えるようにすること。例えば通常の星の光度は属性として持つ光度を返せば良い
が、ある時刻に観測される変光星の光度は適当な関数によって計算されるはずであ
る。このように、実際に内部で行なう処理は異なっているが、外から見れば、実際
に処理の対象となっているオブジェクトは「変光星」なのかそうでない一般の「星」
なのかをを知らなくても「光度を取得する」という同一の処理で行なうことができ
るような機構のことを、「多相性」と呼ぶ。Visitor パターンは、多相性を利用した
パターンである。
オブジェクト指向プログラムの開発においては、設計と実装は区別される。
設計
プログラム開発において、プログラムの動作や属性について、コードの記述のまえ
に、プログラミング言語の文法などと独立にプランを練る段階を経ることが効率的
であるとする立場がある。この立場に立ち、プランを練る段階を設計と言う。この
段階では、現実の系を計算機上で実現するにあたり、何をオブジェクトとして採用
するか、オブジェクトの役割をどう割り振るか、オブジェクト同士の通信仕様をど
う定めるかなどが検討される。
A.12 用語集
実装
249
プログラム開発において、実際にコードを記述する段階。
オブジェクト指向開発においては、オブジェクト同士あるいはクラス同士の関係を図
に表すことによって、設計作業の効率化が行なわれている。1997 年 1 月に、この図の
統一した書式を定めたものが UML 1.0 として発表された。UML は Unified Modeling
Language の略である。最新バージョンは、2004 年 10 月の UML 2.0 である。この定め
にしたがって描かれた図を UML 図と呼ぶ。UML 図には、ユースケース図、クラス図、
オブジェクト図、シーケンス図、コラボレーション図、アクティビティー図、状態図、コ
ンポーネント図、配置図の 9 種類の図がある。本稿で用いられている UML 図は以下の 4
種類である。
クラス図 クラスどうしの継承や、クラスの属性が別のクラスである場合その関連性な
ど、クラスのレベルで記述できるクラス同士の関連性を書く。「クラス」はプログ
ラムを書けば決まるもので、実行時の状態により変化することはないことから、静
的構造図とも呼ばれる。
オブジェクト図
実際の動作状況におけるオブジェクト同士の関連を記述する図。オブ
ジェクトが実際にプログラム上に存在するか、どういった関連を持っているかは、
プログラムの実行状況により変化するため、動的な図である。
シーケンス図
プログラムの実行順序に従って、オブジェクト同士の通信の様子を示す図。
コラボレーション図 (協調図)
オブジェクト同士の通信の様子に注目した図。実行順序
を示すことは出来ないが、シーケンス図に比べて多くのオブジェクトの間の関連を
示すことが出来る。
また、オブジェクト指向の枠組の中で得られた経験は、「デザインパターン」と呼ばれ
る形でまとめられている。これに関連して、本稿に関連する以下の事項がある。
デザインパターン
オブジェクト指向プログラミングにおいて、システムプログラムなど
を分析して実際のプログラミングに有用なオブジェクトやクラスの使い方を選択し
たものを言う。Pattern Language of Program Design 誌で現在でも多数のデザイ
ンパターンが提唱されているが、Gamma[Gamma et al., 1995] らがまとめた 23
のパターンが有名。著者らが自らを 4 人組と称したことから、GoF(Gang of four、
4 人組) パターンなどと呼ばれる。JASMINE Simulator でもさまざまなパターン
が用いられている。本稿では、以下のパターン名が現れている。AbstractFactory、
Builder、Composite、Observer、Singleton、Strategy、Visitor。また、Composite
および Leaf は Composite パターンに現れる、Observer と Observable は Observer
パターンに現れる、Visitor と Acceptor は Visitor パターンに現れる、それぞれ特
定の役割を持ったクラスを表すのに通常用いられる用語である。
A.12.3 クラス名、メソッド名
本稿で紹介している (Nano-)JASMINE Simulator に現れる固有の概念を表す用語とし
て、イベント、イベント処理装置がある。また、以下は本稿のシミュレーターで実装さ
250
付録 A
Simulator の設計
れているクラス名の一部である。AbstractSatellite(setObdh、getPosition、getVelocity、
getAttitude はこのクラスのメソッド名)、AbsUpdaterFactory(getNewStatus はこのクラ
スのメソッド名)、BRSCoord、Comm、Controller、Disturbance、EventSource、EventAc-
ceptor、Filter、GetStatus、Gyro、IRSCoord、JasmineEvent、JsEventHandler(process
メソッドはこのクラスが持つ visit メソッド)、JRSCoord、MagSensor、Obdh、Observa-
tionMode、Optics、Orbit、OrbitUpdaterFactory、OrbitValueSette、Photon(diffract
メソッドおよび reflect メソッドを持つ)、Power、PowerValueSetter、Satellite、Satellite-
UpdaterFactory、SetStatus、SingleStar、SRSCoord、Status、StatusHistory(linearlize
はこのクラスのメソッド名)、StatusUpdater(execute はこのクラスのメソッド名)、STT、
SunSensor、SunShine、Temperature。Matrix は、Jama ライブラリに含まれるクラス
名である。
A.12.4 人工衛星
人工衛星に関しては、以下の略語が用いられている。
ADCS Attitude Determination and Control System
GPS Global Positioning System
OBC オンボードコンピューター
RW
Reaction Wheel。コマのような円盤の回転速度を変化させることによりトルクを
発生する姿勢制御装置
STT Star Tracker の略。恒星を観測し、自身が保持している星表から衛星の姿勢を
知る。
A.12.5 その他
その他、以下の用語が用いられている。
FITS 天文学で用いられる画像ファイルフォーマット
TDI モード CCD デバイスにおいては、読み出しのための転送は最終列の pixel 毎の読
みだしと、一列を隣の列に転送する転送の二種類がある。このうち、列の転送のタ
イミングを自在に制御することにより、視野内を移動する物体の運動と同期させ、
長時間露出を可能にする動作モード。
251
付録 B
データ圧縮
*1
B.1 はじめに
近年の衛星プロジェクトは、大型化や観測装置の進歩によって、取り扱うデータ量が増
大している。増大するデータ量に対応して、大量のデータを地上へ転送しなければならな
い。一方で、人工衛星プロジェクトに特有の制限として、データ転送量の制限とデータ処
理能力を考慮する必要がある。データ転送量に関して、地上のネットワークでは 10Gbps
程度の高速通信が可能だが、衛星からのデータ転送は衛星の軌道や使用するアンテナに依
存して通信速度は数 Mbps から数十 Mbps 程度に制限される。また、宇宙では放射線環
境が厳しいため、使用可能な CPU は非常に処理能力の低いものに制限される。圧縮に関
して言えば、地上のパソコンでは可能なほんの数倍程度の圧縮でも、衛星機上で行なうの
は容易なことではない。本稿では、CPU の処理能力が低いと言う前提のもとで、すばや
く大量のデータを転送するために必要なデータ圧縮手法について、具体的に JASMINE
計画 [Gouda et al., 2003] での検討に沿って議論する。
まず、データ転送量の制限を考察する。JASMINE(高精度赤外線位置天文観測衛星計
画) や SPICA(大型宇宙赤外線望遠鏡計画) などにおいては、さまざまな観点から地球–太
陽が作る L2 点周りでの観測が望ましい。現在 JASMINE でも L2 点周りの軌道を軌道候
補としているが、ここは地球から 150 万 km も離れている。地球から遠いために、大量
のデータを送るためには大型の機械駆動式パラボラアンテナを搭載する必要がある。パラ
ボラアンテナおよび地上局設備などの技術的制約からは、およそ 30Mbps 程度が可能と
なる (旧 NASDA の評価による)。しかしながら、JASMINE は高度な姿勢安定を要求し、
パラボラアンテナの駆動が姿勢擾乱の原因となる。そこで、JASMINE では電気的に指向
性を変化させるフェーズドアレイアンテナの使用を検討しているが、この場合の通信帯域
は旧 NASDA で評価いただいた結果は 0.7Mbps 程度、GAIA(ヨーロッパ宇宙機関で検
討中の可視光位置天文衛星) の評価は多少これより多いがそれでも 1 ∼ 3Mbps 程度にな
る [Perryman, 2004]。例えば JASMINE を例にとると (表 B.1 参照)、CCD から出力さ
れる生データはおよそ 3.5Gbps である。この生データから転送のためにサイエンスに必
*1
この章は、国立天文台報 [山田良透 et al., 2005] に投稿した初版の原稿である。台報では、レフェリーの
求めに応じて入門的な記述を一切削除したが、本報告書では初めてこういった分野に触れる人たちのため
に、初版の原稿のまま掲載する。
252
付録 B
生データ
3.5Gbps
パラボラアンテナ転送限界
30Mbps
2D データ転送量 (平均値)
9Mbps
1D データ転送量 (平均値)
1.19Mbps
フェーズドアレイアンテナ転送限界
表 B.1
データ圧縮
0.7Mbps
データ伝送量の制限と必要な通信量。JASMINE の現仕様では、4096 ×
2048pixels の CCD を 7 × 14 個搭載し、イメージの CCD 通過時間は 3.5 秒である
ことから、生データ量が算出される。2 次元星像イメージを転送するには星像ごとに
720bit のデータが必要。星像数は、Cohen[Cohen, 1992] の銀河系モデルに吸収の見
積りに COBE と DIRBE のデータを採り入れて我々が独自に作ったモデルにより推定
すると、先のイメージが検出器を通過する時間を用いて、サーベイ領域の平均で 4380
個/s 程度となる。星像イメージのスキャン垂直方向を積分してスキャン水平方向の
データ列だけを転送する場合、星像あたり 95bit 程度が必要となる。転送量の評価に
は、アンテナからの衛星可視時間が 8 時間であることを仮定している。
要なデータである星像データを切り出すと、出力データ量は平均で 9Mbps 程度になる。
従って、このデータをさらに 2 ∼ 3 倍程度に圧縮しなければ、転送不可能という結論が得
られる。
衛星機上データ処理量に対する制限も、人工衛星プロジェクトでは非常に厳しい。地
上の CPU は、近年パソコンの急速な進歩によって高速化している。CPU の処理速度を
表す単位もここ数年変遷しているが、従来良く使われてきた MIPS 値であらわすと近年
の CPU の処理能力は 1000MIPS を越えている。しかしながら、この高速化は集積度の
向上によって実現されている。集積度の高い電子デバイスは放射線に弱いことから、衛
星に搭載した場合に正常に動作する保証が無い。たとえばここ 1 ∼ 2 年の間に打ち上げ
られる予定の衛星では、ASTRO-F 衛星では 80186 相当の CPU の搭載が決まっており、
SELENE 衛星では SH-3 三重冗長系の使用が決定している。80186 は、地上では今から
20 年以上前、1982 年に登場した CPU で、MIPS 値は 1MIPS 以下である。SH-3 はもう
少し処理能力が高いが、放射線耐性から三重冗長系を使用するため、データ処理系として
のトータルの処理速度はやはり 2 ∼ 3MIPS 程度と推定される。JASMINE は、今のとこ
ろ 2014 年頃の打ち上げを目標としているので、地上でその 10 年から 20 年前、すなわち
1995 年頃から現在にかけてに開発された CPU 程度の処理能力を持つ CPU が使用でき
ると想定している。JASMINE のミッション提案の時期までに十分な放射線対策の目処
がたつと見込まれる範囲の CPU の処理能力は、MIPS 値で最大 200MIPS 程度と予想さ
れる。データ転送量の制限からはデータの圧縮が必要だが、このデータ圧縮を非常に限れ
た CPU 資源で実現するアルゴリズムを考えなければならない。
次の章で詳しく述べるが、データの圧縮には、圧縮したデータを完全に復元できる可
逆圧縮 (lossless compression) と呼ばれる方法と、近似的にしか復元できない非可逆圧縮
(lossy compression) と呼ばれる方法があり、通常の科学データでは、可逆圧縮が必要と
なる。また、データの種類でテキストデータとバイナリーデータがあるが、科学データは
通常バイナリーデータになる。一般にテキストデータは可逆圧縮を用いても効率良く圧縮
可能だが、バイナリーデータは可逆圧縮の場合、現在の地上のパソコンに搭載されている
ような処理能力の高い CPU を使った場合にようやく容量で 1/2 ∼ 1/3 程度の圧縮が可能
B.2 データ圧縮の分類と原理
になる。衛星に搭載可能な程度の処理能力の CPU を使った場合、大量のデータを高速に
効率良く圧縮することは不可能であり、今後の衛星プロジェクトにおいてはこう言った技
術を新たに開発する必要がある。
そこで、我々は、JASMINE のデータの特徴を検討し、既存の圧縮技術について比較
検討した。第 2 章で詳しく述べるように、圧縮にはモデル化と符号化の二段階がある
が、モデル化に Karhunen-Loeve 変換を、符号化に Golomb-Rice 符号を用いる組合せが
JASMINE の星像データに適していることを見出したので、報告する。Karhunen-Loeve
変換は、複数のデータからのパターンの抽出を線形操作で行なうことができる点におい
て、制限された処理能力のものとで行なえる優れたモデル化手法であり、多くのサイエン
スミッションへの応用が期待される。また、Golomb-Rice 符号化は、一般に小さな数の
出現頻度が高く大きな数の出現頻度が低い場合に適用される。天文画像などは背景レベル
は低く、シグナルレベルが高いため、この符号化が適している。また、Golomb-Rice 符
号化は数値の出現頻度が指数関数的に分布する場合には効率良い圧縮が行なえるという特
徴を持っている。科学データは、自身の出現頻度がこれに従っていなくても、順次近似関
数を差し引いた残差列は指数関数的分布になることが多く、適当なモデル化のもとでは高
効率な圧縮が期待できる手法である。さらに、一般の圧縮における符号テーブルに相当
する符号化パラメータは Golomb-Rice 符号においては 4bit であり、小さいデータでも
効率良く圧縮可能である点で優れている。小さなデータを効率良く圧縮できる特徴は通
信エラーにたいする堅牢性を与え、Golomb-Rice 符号化に要する処理は非常に軽く、特
に衛星プロジェクト一般への応用が期待される。第 2 章では、本検討の基礎となる既存
の圧縮技術に関するサーベイを行なう。第 3 章では、星の CCD 画像などに適した符号
化の手法として、Golomb-Rice 符号化について述べる。第 4 章ではモデル化技術として
Karhunen-Loeve 変換を紹介する。第 5 章は、議論と今後の課題についてまとめる。
B.2 データ圧縮の分類と原理
B.2.1 可逆圧縮と非可逆圧縮
前章で述べた、JASMINE に要求される圧縮の要件を整理すると、以下のようになる。
• 可逆圧縮であること
• 比較的小さなデータでも高効率で圧縮可能であること
• 圧縮に必要なデータ処理量が比較的小さいこと
この章では、まず圧縮技術の基礎的事項を整理し、現在広く用いられている圧縮技術を紹
介し、既存技術が科学衛星プロジェクトにおいてどういう点が問題となるかを整理する。
最初に、ここで用いる圧縮率の定義を述べておく。本稿では、
(圧縮率) = (1 − (圧縮後の容量) / (圧縮前の容量))
を圧縮率と呼ぶことにする。つまり、圧縮する前と圧縮した後でデータの容量が違わなけ
れば圧縮率は 0% 、データが半分になれば 50% 、データが 1/10 になれば 90% と表すこ
とにする。この表記では、数字が大きいほどより効率良く圧縮していることになる。文献
によっては
253
254
付録 B
データ圧縮
(圧縮率) = (圧縮後の容量) / (圧縮前の容量)
を圧縮率と表現している場合もあるので、他の文献のデータと数値を比較する場合には、
圧縮率の定義に注意を要する。
前章で触れたように、データ圧縮には可逆圧縮と非可逆圧縮がある。また、データの種
類には、テキストデータ (文字情報) と、コンピューター上の実行可能プログラムや画像・
音声・数値などのバイナリーデータがある。通常、圧縮アルゴリズム自体はテキストデー
タとバイナリーデータの区別無く使用できるが、テキストデータに適した方法とバイナ
リーデータに適した方法の違いがあるので、データの種類の違いに注意しておく。可逆圧
縮技術は、従来主にテキストデータの圧縮に用いられてきた。テキストの場合は、個別の
文字だけでなくそのつながり方 (単語など) に注目することで、可逆でも圧縮率を 90% 程
度まで向上させることができる。一方バイナリーデータの圧縮は、可逆圧縮では圧縮率は
50% 程度に留まるため、近年はバイナリーデータの圧縮技術のほとんどは、非可逆圧縮で
ある。
インターネットや携帯電話でやりとりする画像データや音声データは非可逆に圧縮され
ており、この技術は音声や画像のデジタル技術及びインターネットや携帯端末の発達に
伴って近年急速に進歩した。静止画像の JPEG や動画の MPEG、音声データに利用され
る MP3(MPEG1 audio layer 3) はいずれも非可逆圧縮技術であり、圧縮率も 90% は普
通であり、場合によっては 95% 以上の圧縮率を示すこともある。
しかしながら、科学データでは可逆圧縮が必要となる。そもそも非可逆圧縮は、音声や
画像などのデータがもともとアナログデータであり、計算機上で扱う音声・画像データは
これをデジタル化したものであるため、離散化誤差以上の精度でデータを正確に復元する
必要が無いという着想で考えられたものである。例えば画像データは、連続的な空間を
pixel に離散化し、pixel 毎の明るさも本来連続的なものであるけれどもデジタルデータに
する時に離散化した整数値を持たせている。音声データでは波形を離散化するわけだが、
振幅と時間間隔の双方の離散化を行なっている。例えば音楽 CD に使われているデータ
は、時間方向は 44.1kHz のサンプリングを行ない、振幅方向は 16bit で離散化されてい
る。動画は静止画像の離散化に加えて時間方向の離散化を行なっている。通常のビデオで
は、1 秒間 30 フレームの離散化が使われている。被写体を pixel に分割する時にすこし
だけ位置がずれることによって生ずるデータの違い、音声を離散化する時の時間原点が少
しだけずれたことによるデータの違いにいたるまで正確に再現しなくても、画像や音とし
て離散化誤差の範囲内で同じものを再現できればそれで十分であるというのが、これらの
データを非可逆に圧縮する時の基本的な考え方である。
そもそも連続的なアナログデータを離散化してデジタルデータにしたという事情は天文
学で扱う画像でも同じように思えるが、事情は大きく異なる。多くの科学データは通常複
数回データ取得を行なう。天体写真でも、複数枚の CCD 画像を取得し、これらから統計
処理を行なう際に、ノイズの性質にまで立ち入って処理を行なっている。また、さまざま
なシステム誤差も、データの数値から計算される。即ち、一見ノイズに思えるようなデー
タも、処理をする上で科学的に意味があるデータとなり得るのである。そのため、科学
データの圧縮を考える際には、可逆圧縮は是非とも必要である。
近年コンピューターの実行可能プログラムを配布する技術として、バイナリーデータ
の可逆圧縮が再び進歩している。コンピューター上でプログラムが実行可能であるため
B.2 データ圧縮の分類と原理
に、可逆であることが必要なのがその理由である。フリーのソフトウエアの配布などにお
いて、バイナリーデータが 60% 程度で圧縮できる方法が利用されている。LHA では LZ
圧縮技術と呼ばれる方法が、bzip2 では Block Sorting 圧縮技術が用いられている。し
かしながら、これらの方法では、数 MB 程度のまとまったデータを圧縮しなければ、高
効率な圧縮はできない。一方 JASMINE の星像データは、2 次元情報を転送する場合は
5 × 9pixel のウインドーを用い、pixel あたり 16bit でデジタル化するとして 90 バイトに
なる。1 次元情報のみを転送する場合は、5 列を 19bit 程度で転送するので 12 バイト程度
となる。bzip2 圧縮を用いて 100 バイト程度のデータを圧縮すると、大抵は圧縮率が負、
即ちもとのデータよりも大きくなってしまう。さらに、必要な星像データをいくつか連
結した大容量のデータを圧縮しようとすると、60% 程度の圧縮率を得ることができるが、
CPU パワーも必要となる。
上で見たような近年発展してきた圧縮技術は汎用性の高い圧縮技術である一方、画像や
音声の圧縮に用いられるものの多くは非可逆であり、バイナリーデータを高効率で圧縮す
る技術も、大量のデータを同時に圧縮することが必要となり、CPU パワーが必要となる。
従って、科学衛星プロジェクトに利用するには不適切である。科学衛星プロジェクトの場
合、汎用性を犠牲にしても良いので、このサブセクションの最初で述べた三つの条件を満
たすような圧縮手法を考慮することが必要になる。
B.2.2 最小冗長符号と Huffmann 符号化
データ圧縮は、符号化とモデル化を組み合わせて行なう。このサブセクションでは符号
化について解説し、次のサブセクションでモデル化について解説する。
通常良く使われる符号化には、Huffmann 符号化、算術符号化、RangeCoder などがあ
る。ここでは、JASMINE で使用する Golomb-Rice 符号化と関連が深い Huffmann 符号
化について、衛星プロジェクトに利用する観点から利点および欠点をまとめる。
通常のデータは、処理の簡単のために、データの種類に応じた固定のビット数が割り
当てられる。文字なら 8bit(英文字) から 24bit(多国語文字)、数値では精度や桁数に応じ
て 16bit から 64bit 程度である。しかしながら、出現頻度が異なるため、出現頻度の多い
データを少ないビット数で表現することにより、データの量を減らすことができる。これ
が、符号化と呼ばれる操作である。例えば通常英文字データは一文字あたり 8bit だが、出
現頻度の高い文字を少ない bit で表現するような bit 表現を考えるわけである。当然のこ
とながら、出現頻度の低い文字は 8bit より沢山の bit 数を必要とすることになるが、出現
頻度の違いから、出現頻度の高い文字のビット数が小さいメリットの方が出現頻度の低い
文字のビット数が大きくなるデメリットより大きいので、全体としてデータを圧縮するこ
とができのである。
通常は 8bit 単位の情報を扱うとデータの種類は 28 = 256 種類となるが、説明の簡単
のため今 3bit で表される 5 種類の文字 ABCDE からなるデータの圧縮を考える。今、
“AEADCABABDCCEDAAABACAABADCAADABAEBE” の 35 文字の並びを考え
ると、固定長 3bit の表現では 105bit が必要となる。今、出現確率の高いものには短い bit
表現を、出現確率の低いものには長い bit 表現を、表 B.2 のように割り当てたとすると、
この文字列は 75bit で表現できる。
このビット表現は、次のように作っている。ABCDE の中で出現確率の低いものから二
255
256
付録 B
文字種
固定長表現
出現回数
可変長表現
A
000
15
0
B
001
6
100
C
001
5
101
D
001
5
110
E
100
4
111
データ圧縮
表 B.2
Huffmann 符号化の例。A,B,C,D,E の 5 つの文字種を固定ビットで表現した
場合と、出現確率に応じて Huffmann 符号化した場合のビット表現の違い。
1
(20)
0
0
(11)
1
(9)
0
1 0
1
B
C D E
A
(15) (6) (5) (5) (4)
図 B.1 Huffmann 木の作り方。表 B.2 で示された出現頻度に従って、Huffmann 木
を構築する様子。文字および文字をまとめた各ノードの横にカッコつきで示されてい
る数値は出現数、各枝の横に書かれている 0 と 1 の数値が枝に割り振られた符号、ルー
トノード (木構造の一番上) から順に各文字にたどり着くように進む枝に割り当てられ
た符号を並べて、この文字の符号とする。
つを選び、これに 1 と 0 の符号を割り当てる。この場合だと、最も出現確率の低い E に
1、二番目に出現確率の低い D に 0 の符号を割り当てる。次に、ABC の 3 文字、および
D と E をセットにした 4 種類の出現確率を比較し、この中から出現確率の低いものから
二つに順番に 1 と 0 の符号を割り当てる。この繰返しで、図 B.1 のような木構造ができ
る。最後に割り当てた符号が最も上位に、最初に割り当てた符号が最も下位になるような
順番に、それぞれの文字に符号を割り当てる。
固定ビット長のデータを可変ビット長のデータに変換する際に、一意に複号できること
が必要である。この条件を満たすためには、長いビットを持つ符号の前方部分列で、短い
ビットを持つ符号と一致するものが存在しなければ良い。表 B.2 のビット列は、この性質
を満たしている。
さらに、この符号化には最小冗長符号になっているという特徴がある [Huffman, 1952]。
情報量を表す単位に、情報エントロピーという概念がある。
(文字のエントロピー) = − log2 (出現確率)
として、メッセージ全体のエントロピーは文字のエントロピーの総和であるとする。例え
ば 1 と 0 が等確率で現れるならば、文字 “0” および文字 “1” のエントロピーは 1 であり、
この二種類の文字 n 文字から表されるメッセージ全体のエントロピーは n となる。情報
B.2 データ圧縮の分類と原理
257
圧縮率
星像数
gzip
bzip2
1
−36%
−92%
10
−4%
−27%
100
0.6%
−5%
1000
1%
0.06%
10
31%
40%
100
43%
54%
1000
45%
59%
表 B.3 既存の圧縮手法による場合。連続した 1 個から 1000 個の星像データを bzip2
および gzip で圧縮した結果。上の星像 1 個から 1000 個の 4 つのデータは全て中心
pixel が full well で露出する場合、下の 10 個から 1000 個の 3 つのデータは JASMINE
の観測で期待できる Luminosity 分布を持つ場合。
エントロピーは、この情報を表現するのに最低限必要なビット数を表すものであり、情報
エントロピーの単位はビットである。つまり、1 と 0 の二つの符号が等確率で出現するば
あい、この符号 n 個からなるメッセージの情報エントロピーは nbit である。通常これは
圧縮できない。先ほどの ABCDE からなる 35 文字の並びの例では、A は 1.22bit、B は
2.54bit、C と D は 2.81bit、E は 3.13bit でこの総和は 74.2bit となる。これを先ほどの
符号化で 75bit で表現しているので、非常に効率の良い圧縮が行なわれたことになる。
B.2.3 モデル化技術
モデル化は、データの中の同じ並びの出現頻度を上げるために、元に戻すことができる
方法でデータを並べかえる操作であり、通常符号化の前に行なわれる。従って、モデル化
自体ではデータは圧縮されず、効率良く符号化するためのデータの変換を行なうに過ぎな
い。モデル化には、FAX などで使われるランレングス (run length) や、非可逆圧縮手法
である JPEG で利用される離散コサイン変換など、非常に多くの種類がある。これらの
既存のモデル化手法を網羅することは、本論文の目的ではないので省略する。
実際に、模擬的な pixel データを作り、Block Sorting を用いた bzip2 圧縮と LZ 圧縮
を用いた gzip 圧縮を行ってみた。我々の星像 Window は、16bit の精度を持つ pixel が
45pixel から構築される、90 バイトのデータである。星像一つでは、圧縮後の容量は 200
バイト程度、即ち二倍以上に増えてしまっている。この理由は、以下のように説明され
る。これらの圧縮技術は、いずれも Huffmann 符号化あるいは算術符号化による符号化
を行っており、その単位は通常 8bit である。圧縮データの先頭には、8bit で表現される
256 種類のデータの符号化テーブルを付加する必要がある。そのため、実データの部分が
若干圧縮できたとしても、符号化テーブルを付加したことにより、小さなデータが効率よ
く圧縮できないのである。複数の星像をまとめて転送する場合は、数がある程度大きくな
れば圧縮効率は向上する。具体的な数値実験結果は、表 B.3 に示す。
衛星の場合、圧縮率以外に次の二点を考慮する必要がある。第一に衛星搭載可能なプロ
セッサの処理能力が低いこと、第二に宇宙空間でのデータ転送で生じるエラーが運用軌道
258
付録 B
データ圧縮
にもよるが 10−5 程度の確率で発生することである。圧縮率の点において、gzip や zip な
どの現在広く用いられている圧縮技術は、ある程度容量の大きなデータにしか適用できな
いことを見た。大きなデータを圧縮する場合、データ量 n に対して n2 から n3 程度の大
きな処理量が必要となる。すなわち、圧縮する単位が大きいほど、データあたりの処理量
も大きくなる。さらに、容量の大きなデータを圧縮すれば、ビットエラーに対しても脆弱
になる。以上の点から、現在広く用いられている圧縮技術を人工衛星のデータ圧縮に用い
ることは不適切であることが分かる。
B.3 Karhunen-Loeve 変換
上で見たように、データ圧縮はモデル化と符号化から構成される。通常まずモデル化に
よって符号化しやすいデータに変換し、その後に符号化を行なう。この処理の順序に従っ
て、まず JASMINE のデータ圧縮でモデル化として採用できそうな技術に関して述べる。
PSF の形状は光学系によって定まるため、PSF を離散化したものと考えられる pixel
データから Airy 関数のパラメータを推定することが出来れば、これがもっとも良いモデ
ル化となる。しかしながら、この変換は極度に非線形であり、計算量が膨大となる可能性
が大きい。さらに、打ち上げの際の光学系の微妙な変形などによって推定関数が変化する
可能性もあり、変換に必要なパラメータを地上実験から予め確定することも難しい。そこ
で、線形計算で行なえ、データから変換に必要なパラメータを推定できる、主成分分析と
いう方法を応用することを考える。
ここで用いるモデル化は、情報科学では Karhunen-Loeve 変換と呼ばれる変換だが、
これは数学の用語で言えば N 個のデータを N 次元空間の点と見なして、N 次元デー
タ点に対して寄与率の高い軸に直交変換する操作である。JASMINE の星像データは
9 × 5 = 45pixel のデータとなるが、個別の星像を表す 45 次元の点を x = {xk } と表す。
i 番目の星像 xi の各 pixel 値は = xki と表すことにする。今、45 個の直交主軸ベクトル
wj = wjk が与えられていれば、
xki =
44
∑
cji wjk
j=0
と書いた時の係数 cji は
cji =
44
∑
wjk xki = wj · xi
k=0
で求められる。
今、データ x から直交主軸ベクトル wjk は、M 個のデータ列 xi , (i = 0 · · · M ) の分散
共分散行列
slm =
M
1 ∑
(xli − x̄li )(xmi − x̄mi )
M i=0
の固有ベクトルとして求めることが出来る。固有値が寄与率となるため、固有値の大きい
物から順に w0 , w1 , · · · とする。
このような変換を行なった係数 cji と xki はともに同じ数の数値だが、寄与率が高いも
のは大きいビット数での表現が必要だが、寄与率が低い物については少ないビット表現で
足りるため、この変換を予め行なうことは圧縮効率を高める可能性がある。さらに、
B.4 Golomb(-Rice) 符号化
259
0.5
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
4
4
3.5
3.5
3
0
3
2.5
1
2
3
2.5
0
2
1
1.5
4
5
2
1
6
7
2
3
1.5
4
5
0.5
8 0
1
6
7
0.5
8 0
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
4
3.5
3
0
2.5
1
2
2
3
1.5
4
5
1
6
7
0.5
8 0
図 B.2
JASMINE Pixel データの主成分。左から第ゼロ主成分、第一主成分、第二主
成分を表す pixel 値の分布。第一主成分が Airy 関数の形を表し、この係数が近似的に
等級を表すものと解釈できる。第一主成分および第二主成分は Airy 関数を縦横二方向
に微分したものと良く似た形状で、近似的に星像中心の pixel 中心からのずれを表すも
のと解釈できる。
第三番目までの主成分に対応する固有ベクトルを、pixel 値として表現した物を示すと、
図 B.2 のようになる。これを見ると、第ゼロ主成分は PSF の形状を示し、第一主成分は
PSF の中心の 5pixel 側へのずれ、第二主成分は PSF の中心の 9pixel 側へのずれを表す。
従って、こう言ったデータを計算しておくことは、圧縮のためだけでなく衛星上で等級を
求めたり、sub pixel 精度での星像中心を評価するのにも役立つ。
主成分を計算するためには内積だけで良いが、変換行列を求める計算はコストがかか
る。しかしながら、これは頻繁に行なう必要がある計算ではないので、ある程度データが
たまった段階で計算し、光学系や衛星などの安定度をチェックする必要がある頻度で再計
算すれば良い。従って、変換行列の計算コストは全体としては問題にならない。
B.4 Golomb(-Rice) 符号化
第二章で見ように、現在広く用いられているバイナリーデータの可逆圧縮技術に用いら
れる符号化は、人工衛星のデータの処理には不向きである。この理由は、8bit(256 種類)
のデータを符号化するため、実際送信する必要があるデータに比較して参照テーブルが大
きくなってしまう点にある。
この問題点を解決するためには、単純にはテーブルそのものを固定とし、これを符号化
側と復号で記憶させておいて使用するものである。しかし、この方法では柔軟性が無い。
本質的には、参照テーブルが少ないパラメータで表される方法があれば良いことになる。
そこで、次のような符号化 (Golomb-Rice 符号化) を考える [Golomb, , Rice, 1979]。
この符号化は、0 に近いほど頻繁に現れ、0 から離れると出現頻度が下がるようなデータ
260
付録 B
主成分数
残差計
主成分
k
計
0
338.527
0
4
342.527
1
247.013
12.247
4
263.260
2
222.109
22.737
4
248.846
3
207.794
31.814
4
243.608
4
203.974
39.257
4
247.231
5
202.063
45.703
4
251.766
6
200.866
51.495
4
256.361
7
199.738
57.001
4
260.739
8
198.485
62.497
4
264.982
データ圧縮
表 B.4
Golomb-Rice 符 号 化 し た 場 合 の 必 要 な bit 数 。も と の デ ー タ は 720bit。
10000 サンプルでの平均値。主成分を取り出さなくても、Golomb-Rice 符号化だ
けで 52% 程度の圧縮が可能、もっとも効率が良い第三主成分まで取り出した場合では
66% 程度の圧縮が可能となっている。
の符号化に適している。今、データ列 ei , (i = 1, · · · , n) を圧縮する場合に
a=
n
∑
|ei |
i=1
に対して
2k < a
を満たす最大の k を計算する。この計算は、
for (k = 0; (n << k) < a; k++);
の一行のコードで計算できる。これに対して、kbit より上位のビットは unary コードで、
下位のビットはそのまま無変換で符号化する。unary コードとは、整数値 x を x 個の 0
並びに stop コード 1 を付加した符号を割り当てる方法である。0 と 1 の役割は完全に逆
転しても良い。unary コードによる木構造は、整数 x の出現頻度が 2−x−1 である場合に
は Huffman 木の木構造と一致することが知られている。今、Golomb-Rice 符号化の場合
は上位ビットと下位ビットを分けていることから、指数関数的な分布をする場合にはほぼ
最小冗長符号となる。
星像の pixel データは PSF で決まり、中心が大きく周辺部が小さい。これを主成分に
分解すると、頻度分布はほぼ指数関数的になる。さらに、星の光度の数分布もほぼ指数関
数的になる。したがって、データは二重の意味で指数関数的に分布することが期待され、
Golomb-Rice 符号化で効率良く圧縮できることが期待できる。数値的に実験したところ、
表 B.4 に示す通りほぼ 1/3 程度に圧縮可能であることがわかる。表は 10000 サンプルで
の平均値である。主成分数 0(すなわち Golomb-Rice 符号化だけを適用する場合) は、サ
ンプル数は統計的な意味を持ち、それ以外の場合は主成分を適切に取り出すことが出来る
かどうかが関係するが、同時に 1000 サンプルの場合の数値実験を行なったが結果は 1%
程度しか違わなかった。
B.5 まとめ
B.5 まとめ
JASMINE の星像を転送するための圧縮手法を検討した。モデル化に Karhunen-Loeve
変換を、符号化に Golomb-Rice 符号を用いる組合せが、JASMINE の星像データに適し
ていることが分かった。星像は PSF により表現されるが、データから PSF のパラメー
タを逆算する計算は極度に非線形であり、処理量が膨大となる。さらに、装置の経年劣化
などがあるため検出器の応答まで含めた PSF は時間的に変化し、これを予想することは
困難である。Karuhnen-Loeve 変換は、パターンの抽出を線形操作で行なうことができる
点において、制限された処理能力のものとで行なえる優れたモデル化手法である。実際、
JASMINE の星像データから Karuhnen-Loeve 変換の変換行列を求めると、寄与率が高
い順に等級、星像の 5pixel 側へのずれ、星像の 9pixel 側へのずれを表す成分を取り出す
ことが出来ることが示された。この操作において、あらかじめ PSF に関する情報を必要
とせず、純粋にデータから主要な 3 成分が取り出せたことは、他の多くのミッションへの
応用可能性を示唆するものである。
また、Golomb-Rice 符号化は、一般に小さな数の出現頻度が高く大きな数の出現頻度
が低い場合に適用され、数値の出現頻度が指数関数的に分布する場合には効率良い圧縮が
行なえる。科学データは、データ自身の出現頻度がこれに従っていなくても、近似に従っ
てテンプレートとなる関数を差し引いた残差列は指数関数的分布になることが多く、こう
いったデータの圧縮に適した方法である。さらに、一般の圧縮における符号テーブルに相
当する符号化パラメータは 4bit であり、小さいデータでも効率良く圧縮可能である点で
優れている。小さなデータを効率良く圧縮できる特徴は通信エラーにたいする堅牢性を与
え、Golomb-Rice 符号化に要する処理は非常に軽く、特に衛星プロジェクト一般への応
用が期待される。
我々の数値実験の結果、JASMINE の星像に相当する 720bit のバイナリーデータを効
率良く 1/3 程度に圧縮出来ることが分かった。現在、コンパイルされた計算機プログラム
の配布などに用いられている優れた可逆圧縮手法である Block Sorting や LZ 圧縮技術を
用いた場合、この圧縮率を得るには 1MB 以上のまとまったデータを高速の CPU で処理
する必要が有るが、Golomb-Rice 符号化を用いれば 90 バイト程度のデータでも十分にこ
れらに匹敵する圧縮率が得られることになる。
この手法によると、等級に相当するデータ、星像中心のサブピクセルレベルでのずれを
表すデータが取得できる。こう言ったデータは、衛星姿勢の把握などに用いることが出来
ることが期待できる。この使用可能性を評価するため、今後はこう言ったデータの信頼性
や衛星搭載機器の機械的なずれや経年変化による性能変化による影響などを評価すること
が必要となる。
261
263
付録 C
位置天文観観測データの解析と感度
解析
C.1 はじめに
我々は、システム工学の「要求分析」の手法を取り入れて位置天文観測の要求を抽象
化することにより、JASMINE の観測の条件下では、HIPPARCOS や GAIA のように
ビーム混合鏡を使う必要はなく、単一望遠鏡での観測が可能であることを明らかにした
[山田良透, 2005]。しかし、解けるパラメータと解けないパラメータを的確に分類してシ
ステムに対する要求を明確化し、また観測をスケジュールや解析手順を最適化するよう
な、さまざまなトレードオフ項目が残されており、これを明確化するには推定精度を正確
に評価することが必要である。また、実際のデータ解析においても、直接最小二乗法を適
用したり巨大行列を直接反転する方法は取扱が極めて困難であり、かつ精度保証もないの
で、逐次解法を構築する必要がある。*1 *2
この章では、拘束条件付きの最小二乗問題の線形化と感度解析、これを逐次近似式に書
き直すいわゆるカルマンフィルターの応用までを、位置天文に関連する例題を交えて記述
する。
C.2 位置天文パラメータの推定
一般に、位置天文観測のデータ解析は巨大な観測方程式を解く問題である。直接観測
量 x(Eichhorn[Eichhorn and Clary, 1974] に従って observations と呼ぶ) は瞬時瞬時の
プレート上の星の位置である。これらは、星の位置天文パラメータ、撮像フレームの原
点・方向・スケールなど、撮像フレームを表すパラメータなどで記述される。これらの一
連のパラメータをまとめて a(Eichhorn[Eichhorn and Clary, 1974] に従って adjustment
parameters または unknowns と呼ぶ) と書く。
具体的には、プレート j での星 i のプレート上の位置 (xij , yij ) は、星の天球上の位置
*1
定理 11 追加、系 26 の追加、補題 15 の記述方法を変更、補題 44, 補題 45, 系 17, 系 46 の関係を整理。
トイモデルの計算。
*2 この章の解析は、山田良透*3 , 篠本滋*4 , 阪上雅昭*5 , で行ったものである。
264
付録 C 位置天文観観測データの解析と感度解析
(ξij , ηij ) を用いて、プレートが原点位置と方向で表されるなら
( ) (
) x
ξij
Aj Bj Cj ij
yij
=
ηij
Dj Ej Fj
1
のように表される。Aj , Bj , Dj , Ej は回転を、Cj , Fj は並進を表し、observations (xij , yij )
がノミナルな回転並進成分は既に補正済みの値であれば、
(
Aj
Dj
Bj
Ej
Cj
Fj
)
(
1
∼
0
0
1
)
0
0
からの微小なずれだけを問題にすれば良い。また、星の天球上の位置は、位置天文パラ
メータにより記述される。
ξij = λi + µλi cos βi tj + πi sin(L − λ)
ηij = βi + µβi tj − πi cos(L − λ) sin β
L は太陽の黄径で、時間の関数である。また、黄道座標以外の座標を用いる場合は、式は
もう少し複雑になる。これらの関係を用いると、直接観測量
(
x = ···
xij
···
yij
···
)
とパラメータ
a = (· · · λi βi µλi µβi πi · · · Aj Bj Cj Dj Ej Fj · · · )
の間には等式関係があり、x について解けば、形式的に
x = f (a)
(C.1)
の形に書くことが出来る。この x を実際の観測値 x0 と比較し、
2
|x0 − f (a)|
の最小値を与えるようなパラメータ a を求めるのが、我々が行ないたいパラメータ推定問
題である。
この観測方程式は、例えば星の位置を表すパラメータと撮像フレームの位置を表すパラ
メータを同じだけ平行移動や回転してもこの式は変わらないなど、縮退を含む。この縮退
を解くために、座標系の固定などの制約を加える。これらの制約は、observations x を含
まない adjustment parameter だけの制約条件、g(a) = 0 の形で書くことが出来る。こ
れと式 (C.1)、あるいは x − f (a) = 0(あるいは x について陽に解かれていない形でも良
い) をまとめて、位置天文の解析の式は
F (x, a) = 0
という形の等式制約条件 (condition equation) のもとでの
|x − x0 |
2
の最小二乗問題とみなすことが出来る。これらをまとめれば、次のような問題設定が可能
である。
C.2 位置天文パラメータの推定
265
問題 7 (パラメータ推定) [Eichhorn and Clary, 1974] 未知量として真値の集合 (a
set of quantities) x = {x}、パラメータの集合 a = {a} に対して、等式制約条件
(f1 , f2 , . . . , fn )T = F 、
fi ({x}i , {a}i ) = 0 or F (x, a) = 0
(C.2)
のもと、観測誤差 (observing errors) v = x − x0 により表される v T σ −1 v を最
小化する最小二乗解から、パラメータの残差 ∆, a = a0 + ∆ を求めよ。ここで、
{x}i ⊂ {x}、{a}i ⊂ {a} であり、いくつかは空集合 (empty set) であっても良い。
また、以下の仮定が成立する。
1. 観測は x の近似値 (推定値) の集合 (approximation set) x0 = {x0 } を与
える。
2. a の推定値 (estimates) a0 を得ることが出来る。
3. x の分布に対する共分散行列 (covariance matrix)σ は既知である。
問題 7 仮定 1 は x0 が通常の観測値であるため成立、問題 7 仮定 2 は等式制約条件 (C.2)
は x0 = x の時 a について解くことが出来るので、(C.2) に適切な連続性の条件があれば
成立する。問題 7 仮定 3 は例えば多変量正規分布 (multivariate normal distribution) で
は観測量 x0 の同時密度関数は
f (x0 ; µ = x, σ) =
1
(2π)p/2 |σ|
1/2
[
]
1
T
exp − (x0 − x) σ −1 (x0 − x)
2
で表され、従って σ は既知量となり成立。x は通常の観測量であり、多変量正規分布は合
理的仮定である。
パラメータ残差や観測誤差が十分小さく、真値のまわりで線形に展開することが妥当で
あるような場合は、問題 7 は行列の反転問題となる。即ち、Brown の補題 (補題 34) を用
いて、次の定理が成立する。
定理 8 (制約付き最小二乗法 (線形)) [Eichhorn and Clary, 1974] 以下の仮定、
1. 誤差 {v} および残差 {∆} は十分に小さい (Taylor 展開可能)
2. 誤差 {v} および残差 {∆} は小さく、二次の項は無視できる (線形化可能)
のもと、問題 7 の解は、
F 0 + XσXT Λ + A∆ = 0
(C.3)
T
A Λ=0
(C.4)
あるいはベクトル形式で書くと
(
XσXT
AT
)( ) ( ) ( )
A
Λ
F0
0
+
=
∆
0
0
0
(C.5)
となる。ここで、添字 0 は x0 , a0 での値を表すとして、
(
F 0 = F (x0 , a0 ),
X=
∂F
∂x
)
(
,
0
and
A=
∂F
∂a
)
0
266
付録 C 位置天文観観測データの解析と感度解析
証明は C.10.1 章 (302 頁)。
簡単のため、各観測から観測フレームより広い領域の瞬時の星の位置を求める問題と、
各時刻の位置から位置天文パラメータを導出する問題とに分離し、前者のみを考える。更
に、簡単のため、以下の仮定を置く。(1) 一次元座標値のみを考える。(2) プレートの延
び縮みは校正済みで、プレートは原点座標のみで特定可能である。(3) 各観測が独立で、
かつ同じ誤差分散 σ を持つ。この時、観測量はプレート j での星 i のプレート上の座標
(
x = ···
)
· · · であり、パラメータは星 i の位置 ai とプレート j での原点位置
(
)
bj 、すなわち a = · · · ai · · · bj · · · となる。等式制約条件は
xij
(
G (x, a) = · · · , xij − ai + bj
,···
)T
=0
となる。共通原点の不定性を固定するため、一つの星の位置が既知である、あるいは全
ての星の共通重心が既知であるというような制約条件が必要となる。例えば後者の場合
では、
F (x, a) =
(
)
G (x, a)
= 0,
H (a)
H (1) (a) =
∑
ai
i
が、上の仮定のもとで完全な制約条件となる。これらを用いると、式 (C.5) に現れる行列
は、星が n 個、プレートが m 枚、観測が k 回として
( 2 (k×k)
σ I
σ=
0
−1 .
. −1
. −1
.
A=
.
.
.
.
.
1
1
)
0
,
0
.
.
.
−1
−1
.
1
)
I(k×k) 0
,
X=
0
0
((k+1)×(n+m))
.
1 . .
.
1 . .
.
. 1 .
.
. 1 .
.
. . 1
−1 . . 1
1
. . .
(
のような行列と考えられる。(A の具体的な形は、n = 4, m = 3, k = 6 の場合。)
パラメータの残差 ∆ を求める問題は、式 (C.5) から逆行列を求める問題となる。部分
行列の正則性から、補題 24、補題 27、補題 29 を適宜用いることで、推定問題の解を得る
ことが出来る。位置天文で使われる制約条件では、通常補題 29 を用いることになる。
以上の記述を一般化すると、次のようになる。最小二乗問題が well defined であるため
条件は、式 (C.5) に現れる行列が正則であることである。観測方程式は等式制約条件の
一部 G(x, a) となり、観測手法を与えた場合共分散行列行列 σ が定まる。G(x, a) から
(
YσYT
∂G
∂G
および B =
が定まる。
Y=
∂x
∂a
BT
)
B
0
が正則ならこれで問題設定は完了
するが、前述の例のように一般にはこの行列は正則でない。そのため、パラメータ間の拘
( )
( )
束条件 H(a) を与える。X =
Y
0
、A =
B
C
となる。ここで、C =
∂H
である。こ
∂a
の拡張により、式 (C.5) が正則になるように H(a) を定めることで、問題を well defined
にすることができる。このような H の構築のため、以下の定理を用いる。
C.2 位置天文パラメータの推定
267
補題 9 (反転可能条件)
G
0
BT
0
0
CT
B
C
0
が正則であるための必要十分条件は、
1.
( )
B
の各列が一次独立、即ち
( )
B
は単射。
C
C
2. CT の各列が一次独立、即ち CT は単射。
3. P⊥ G が im(B) の直交補空間から im(B) の直交補空間への射影として全単射。
ここで、P⊥ は im(B) の直交補空間への射影。
証明は C.8 章 (299 頁)。通常、観測の共分散行列は正則であり、従って G も正則でほぼ
対角であるから、条件 (3) は満たされている。これに観測方程式から導かれる線形写像 B
の性質から条件 (1) 及び (2) を満たす適切な C を選択すれば、問題は well defined にな
る。手続きを具体的にまとめると、以下の定理になる。
系 10 (拘束条件の構築) 正則な観測の共分散行列 σ および観測方程式から与えられ
る制約条件 G(x, a) より、以下の制約条件 H(a) を追加すると、問題が well defined
になる。ただし、行列
∂G B=
,
∂a 0
∂G Y=
∂x 0
に対して PB⊥ YσY T の定義域を im(B) の直交補空間に制限した線形写像は全単射
であるとする。ここで、PB⊥ は B から im(B) の直交補空間への射影、下つき添字
0 は x = x0 , a = a0 での値を意味する。
• H の制約条件の数は、adjustment パラメータの数から rankB を引いた数 n
である。
• 全ての B の行ベクトルと一次独立な、一次独立なベクトルは n 個ある。この
n 個のベクトルを ci , i = 1, . . . , n と書く
• adjustment パラメータを a と書くと、Hi (a) = ci · a である。
証明は C.8 章 (301 頁)。
定理 11 (拘束条件と推定誤差) パラメータを表す線形空間 A の中で、B の各行ベク
トルが張る空間 B と C 各行ベクトルが張る空間 C が直交している場合が、最もパラ
メータ推定精度が高い。
証明は C.8 章 (301 頁)。
精度を評価する問題は、観測の分散共分散行列から推定パラメータの分散共分散行列を
求める問題となる。これには、次の定理が有用である。
268
付録 C 位置天文観観測データの解析と感度解析
定理 12 (等式制約条件) 定理 8 の条件が成立し、推定問題が式 (C.5) で表される場
合、最小化問題 7 の推定パラメータの共分散行列 Σ は、
(
XσXT
AT
で表される。これは、行列
A
0
(
XσXT
AT
)−1
)
A
0
=
(
?
?
)
?
−Σ
が正則の場合に成立する。ここで、X、A
の意味は定理 8 に示すとおりである。
証明は C.10.2 章 (303 頁)。この定理の条件は、式 (C.5) の全行列の正則性のみで、部分
行列の正則性と無関係である。定理 8 では部分行列の正則性の違いにより行列の反転方法
が異なるが、反転された行列の形とこの定理 12 より、反転方法によらず共分散行列は求
められる。(系 35、補題 37、補題 40 参照)
等式制約条件を
F (x, a) = x − f (a) = 0
(
)−1
と書けば、X = I となるので、定理 33 の結果、即ち共分散行列が AT σ −1 A
である
ことが導かれる。これは、ガウス分布の統計を扱う際に良く知られた性質である。
C.3 カルマンフィルターと行列の逐次反転の類似性
位置天文に現れる行列の次数は非常に大きい。行列 A は、列数がパラメータの数であ
り、観測される星の数の 5 倍程度に視野の数の数倍にあたる視野座標を表すパラメータ
を加算したものであり、数千万に及ぶ。また、行数は観測数であり、数億に及ぶ。すなわ
ち、数億次の行列の逆行列を求める問題となる。
巨大行列を直接解析的に反転することは、一般に困難である。数値的に取り扱う場合で
も、次数百を越える巨大行列の数値的な反転精度は、偏微分方程式の差分化などに表れる
一部の特殊な疎行列以外では保証されない [Press et al., 1992]。一般に、位置天文の観測
方程式から得られる行列は、一部に密な部分を含むため、注意を要する。さらに、この数
のパラメータを持つ残差の二乗和の最小値を与えるパラメータ値を直接探索する方法の収
束性は保証されないし、たとえ収束しても得られている解が望む global minimum である
保証はなく、望まない local minimum に落ちている可能性は否定できない。即ち、直接
解析的な行列反転や、数値的な行列反転あるいは最小二乗探索で、星の数やプレートの数
が大きい場合の振る舞いを推定することは、非常に困難である。
そこで、iterative な方法を検討する。
C.3 カルマンフィルターと行列の逐次反転の類似性
269
補題 13 (Filtering) [Einchhorn, 1993] 観測量 {x1 , · · · , xn } にパラメータ a 基づ
く推定値を an と書く。また、等式制約条件も n に依存し、F n と書くことにする。
このとき、パラメータ an−1 の残差 ∆n−1 とその分散共分散行列 Σn−1 が既知であ
る場合、∆n および Σn は以下で与えられる。
((
)
)−1
Σn = Σn−1 − Σn−1 AT XσXT + AΣn−1 AT
AΣn−1
(
)
T
T −1
∆n = −Σn A XσX
F
ここで、
A=
∂F
,
∂a
X=
∂F
,
∂x
(
at x = xn−1
)
x ,
a = an = an−1 + ∆n
である。
証明は C.11.1 章 (309 頁)。 この定理が意味することは、n − 1 段目の平均と共分散行
列が与えられていれば、n 段目で新たな観測を追加しても、追加された観測に対応する小
さい次数の行列の反転だけで、n 段目での平均と共分散行列が求められるということであ
る。従って、観測が必要十分しかなく、共分散行列を簡単に求められる場合を 1 段目とし
てとって、逐次小さな行列だけの反転を含む式を計算してゆくことで、巨大な行列反転問
題をとくことが出来る。
この定理の結果とカルマンフィルター [Kalman, 1960, 赤池弘次 et al., 1998] を比較す
る。カルマンフィルターでは、時系列の状態 z(n) が F で時間発展し、これに外乱 v(n)
が行列 G を通じて影響する。観測値 x(n) は、状態から行列 H を通じて得られ、観測雑
音 w(n) が作用する。
z(n) = F z(n − 1) + Gv(n)
x(n) = Hz(n) + w(n)
カルマンフィルターでは、状態量の初期値、観測雑音、外乱は全てガウス分布であると仮
定する。この仮定より、時系列の全てに対して、状態量・観測量はガウス分布となる。つ
まり、確率分布は平均と分散で一意に決まる。観測量 {x(1), · · · , x(j)} が与えられたと
き、n 番目の状態量の確率分布の平均を z(n|j)、分散を V (n|j) と表すことにする。n − 1
番目の観測値が与えられたときの状態量の平均 z(n|n − 1) 及び分散 V (n|n − 1) が既知で、
さらに n 番目の観測量 x(n) が得られたとき、状態量の平均 z(n|n) および分散 V (n|n) は
以下の式のようになる。
(
)−1
K(n) = V (n|n − 1)H T HV (n|n − 1)H T + R
z(n|n) − z(n|n − 1) = K(n) (x(n) − Hz(n|n − 1))
V (n|n) = (I − K(n)H)V (n|n − 1)
ここで、K(n) がカルマンゲインと呼ばれるものである。Kalman は、この式を Bayes 統
計の考えから導いた。
ここで、adjustment parameter a は Kalman の表現で言えば状態量、observation x
は観測量と考えられる。観測の共分散行列 σ および制約条件に現れる X が正則行列なら
式 (C.18) より
v = −X−1 A∆ − X−1 F 0
270
付録 C 位置天文観観測データの解析と感度解析
が 導 か れ る 。即 ち 、観 測 行 列 H は −X−1 A に 対 応 す る 。X の 正 則 性 を 用 い れ ば 、
(AB)−1 = B−1 A−1 およびに (AB)T = BT AT 注意して共分散行列の漸化式は
(
((
)
)−1 )
Σn = I − Σn−1 AT XσXT + AΣn−1 AT
A Σn−1
)
(
(
)T (
(
)T )−1 ( −1 )
= I − Σn−1 X−1 A
σ + X−1 AΣn−1 X−1 A
X A Σn−1
となる。これは、Σn ∼ V (n|n)、Σn−1 ∼ V (n|n − 1)、X−1 A ∼ H 、σ ∼ R の置き換え
を行えば、カルマンゲインの式と V (n|n − 1) から V (n|n) への逐次更新の式と完全に対
応がつく。また、カルマンゲインの式を整理すれば、
(I − K(n)H) V (n|n − 1)H T = K(n)R,
T −1
··· V (n|n)H R = K(n)
となる。X の正則性を用いて ∆n の式を整理すると、
(
)−1
(
)T
∆n = −Σn AT XσXT
F = −Σn X−1 A σ −1 X−1 F
となり、F はもとの制約条件 F 0 に既知の観測値を代入した上での制約条件の式であり、
即ち既推定値を用いた観測予測値と実際の観測の残差と考えられる。F に X−1 を乗ずる
ということは x−f (a) = 0 の形に整理することであるから、X−1 F ∼ x(n)−Hz(n|n−1)
である。また、∆n ∼ z(n|n) − z(n|n − 1) であることから、z の更新の式と完全に対応関
係がつく。
C.4 位置天文パラメータの拘束条件の構築
位置天文パラメータの推定に最小に情報を用いる場合、星の位置基準をずらすこととプ
レートの位置基準を (反対方向に) ずらすことは同じであり、位置基準などいくつかの量
に明らかな縮退がある。従って、絶対的な位置は後で推定し、最初の段では相対位置だけ
を推定するという手順をとるという特徴がある。本章では、こういった場合の拘束条件の
作成方法について考察する。
C.4.1 定式化
観測量 xij が星の位置 ai とプレートの位置 a′ j で記述されるとする場合の観測方程式は
fij (x, a, a′ ) = xij − ai + a′ j = 0
であらわされる。同じ観測値に対して ai → ai + δ および a′ j → a′ j − δ を同時におこな
う変換を、この観測方程式は区別できない。
最も直観的な解決方法は、ある一つの星の位置が既知であると考えることである。ま
た、別の解決方法としては、すべての星の位置の平均が既知であると考えることである。
この二つの解決方法は、平均値としては同じ値を与えるが、同じ観測方程式でこれらの二
つの異なる拘束条件を与えた場合を考えると、パラメータの共分散行列は異なる。すなわ
ち、値の点では同じ結果を与える異なる拘束条件が、感度解析の観点からは異なる「系」
を考えていることになることに注意が必要である。
このように、位置天文の観測方程式は、星のパラメータとプレートパラメータを相
殺するように変化させるいくつかの縮退する自由度がある。この観測方程式の最小二
C.4 位置天文パラメータの拘束条件の構築
271
1∑
2
(xij − ai + a′ j ) を最小化する問題である。今、仮に ai に着目す
2 ij
乗問題は S =
るとして (a′ j に着目しても同じ議論ができる)、推定近似値 a0i を導入して、以下の
S′ =
1∑
2
(a0i − ai ) の最小化問題と見ることができる。*6
2 i
今、微小変換が観測方程式に縮退を起こすような変換を考える。変換の生成子 δ は不定
であるから、変換 ai (0) → ai (δ) に伴って a0i が変換され、結果として
∂S
= 0 となる。
∂δ
今、ai に拘束条件を与えれば、a′ j にも自動的に拘束条件が与えられることで、縮退が解
けて両方の値を解くことができるという論理構造になっている。そこで、上の式で a0i (観
測値および a′ j を含む) を定数と考えて、S ′ の δ に対する変化を考える。さらに、微小量
δ に対して線形化可能な範囲を考えれば、
∂ai
の部分は δ を含まない定数で、以下の拘束
∂δ
条件を考えればよい。
∑
∂ai
∂S ′
=
(ai (δ) − a0i )
∂δ
∂δ
i
∑ ∂ai
ai
∼
− const = 0
∂δ
i
C.4.2 位置
変換は ai → ai + δ なので、
∑
∂ai
= 1 となる。したがって、
ai の値が決まれば δ を
∂δ
i
決めることができることが分かる。絶対的な位置の不定性は、位置変数の平均値が既知で
あるという条件で決められる。
C.4.3 プレートの回転
プレートの角度 θ の回転は、
( )
(
xi
cos θ
→
yi
− sin θ
*6
2S =
sin θ
cos θ
)( ) (
)
xi
cos θxi + sin θyi
=
yi
− sin θxi + cos θyi
∑(
)2
xij + a′ j − ai
ij
)
∑ ∑ ((
)2
(
)
xij + a′ j − 2 xij + a′ j ai + a2i
=
i
=
∑
i
=
∑
i
j
∑(
∑(
)2
)
1
2
′
′
2
J
xij + a j −
xij + a j ai + ai
J j
J j
∑(
xij + a
′
)2
j
j
2
2
∑ 1 ∑(
)
)
1 ∑ (
′
′
2
xij + a j
+J
−
xij + a j − ai
J
J j
i
j
と変形できる。したがって、
1∑
(a0i − ai )2
2 i
)
1 ∑(
xij + a′ j
a0i =
J j
2
)
)
1
1 ∑ ∑ (
1 ∑ (
′
′
′ 2
S =
S−
xij + a j
xij + a j +
J
2 i
J
j
j
S′ =
272
付録 C 位置天文観観測データの解析と感度解析
で表わされる。
∂
∂θ
より、拘束条件は
∑
)
( )
(
xi yi
=
yi θ=0
−xi
(y0i xi − x0i yi ) = const.
i
となる。
C.4.4 プレートの伸縮
変換は ai → (1 + δ)ai となる。
∂ai
= ai 、拘束条件は
∂θ
∑
a0i ai = const.
i
C.5 位置天文パラメータの逐次解法
C.3 章で述べた定理は、実は位置天文での block adjustment には使えない。その理由
は二点ある。
一点は、この定理は、カルマンフィルターと同様、推定するパラメータが n − 1 段目でも
n 段目でも同じであり、観測が追加された場合に適用できる。しかし、block adjustment
では、観測のみが追加されるとパラメータも追加される。この点は、カルマンフィルター
から拡張カルマンフィルターへの変更で対応される。
二点目は、この定理は同じ制約条件のもとで n を順次増やして行くことを想定してい
る。しかし、制約条件が n により異なる場合がある。例えば全部の星の重心位置に興味が
無い場合には重心位置が既知という制約条件を科すことになるが、星の数が一つ増えれば
制約条件は違った形になる。
そこで、位置天文に使える形に、逐次解法を拡張する必要がある。制約条件は星につけ
てもフレームにつけても、また双方を組み合わせても良い。簡単のため、制約条件を星で
つける場合を考えると、観測プレートが一枚増える場合は観測のみが追加され、既存のプ
レートに新たな星の撮像データを加える場合は観測と制約条件が同時に追加されると見る
ことが出来る。観測のみが追加される場合は、次の定理を用いる。
C.5 位置天文パラメータの逐次解法
273
系 14 (Filtering、1 パラメータ追加) 観測のみが追加される場合、既存パラメー
タを a、新たに追加されるパラメータを b、この観測に伴う制約条件を
x − f (a, b) = 0
と書き、
α=−
∂f
,
∂a
β=−
∂f
∂b
と置き (α は縦ベクトル)、この観測にともなう分散を σ 2 とすれば、
(
Σn =
Σn−1
−αT Σn−1 /β
−Σn−1 α/β
1/β 2 s
)
∆a = 0
1
∆b = − F0
β
となる。ここで、s = σ 2 +
∑
−1
αi αj (Σn−1 )ij
および F0 = x0 − f (a0 , b0 )、a0
ij
は n − 1 番目の観測での a の暫定値、b0 は b の近似値、x0 は n 番目の観測の観測値
である。
証明は C.11.1 章 (314 頁)。
また、観測が追加され、制約条件が変更される場合は、拘束条件を複数加えることは、
過剰条件となる。そこで、
• 共通の拘束条件の下で観測とパラメータを一つ追加する場合の共分散行列の変更
• 拘束条件が変更を受ける場合の共分散行列の変更
に分けて考える。
G
0
BT
0
0
CT
−1
P
B
C = Q T
0
RT
Q
S
TT
R
T
U
のタイプの行列を反転する場合、G, B, C がそれぞれ α ̸= 0 倍された場合に逆行列がどう
変更を受けるかを考えると、次のようになる。
G が α 倍された場合 P, Q, S は α−1 倍、U は α 倍、R, T は変更されない。
B が α 倍された場合 S は α2 倍、Q は α 倍、R は α−1 倍、U は α−2 倍、P, T は変更
されない。
C が α 倍された場合 Q, T は α−1 倍、S は α−2 倍、P, R, U は変更されない
この中で、行列 C を定数倍しても U は変更を受けないので、拘束条件の変更としては、
• C のある行列要素が 0 の場合に 1 に変更する
• C のある行列要素が 1 の場合に 0 に変更する
の二種類を考えればよい。さらに、変更される行列要素は一番最後に追加された行列要素
に限定してよい。
ただし、行列要素を変更する場合、共分散行列を求めるために、共分散行列以外の行列
274
付録 C 位置天文観観測データの解析と感度解析
要素が必要となり、解を求める場合も共分散行列以外の行列要素を知る必要がある。その
ため、まず系 15 を用いて全行列を求め、さらに変更された全行列を用いて拘束条件の変
更に伴う全行列の変更部分を補題 46 を用いて計算することで、全行列の要素を求めるこ
とが出来る。これと、系 14 を適宜用いることで、目的の行列を順次反転することが可能
となる。
補題 15 (共分散が既知の場合の行列再構築) 与えられた正則な対称行列 G および
行列 B、C に対して
G
0
BT
0
0
CT
−1
P
B
C = QT
0
RT
Q
S
TT
R
T
U
の U が既知の場合、CU = 0 が成立する。また、残りの行列要素は
R = −G−1 BU
(
)
P = E − RBT G−1 = G−1 + G−1 BUBT G−1
(
)−1 (
) (
)−1 (
)
T = CCT
C E − BT R = CCT
C E + BT G−1 BU
Q = −G−1 BTT
S = −QT BTT = TBT G−1 BTT
のように求められる。
証明は C.11.2 章 (315 頁)。
系 16 (共分散が既知の場合の解の構築) パラメータの共分散行列 Σ が得られてい
る場合、
G
0
BT
0
0
CT
B
C
0
で与えられる系の残差は CCT と G の逆が求められれば以下で得られる。
(
)
∆ = ΣBT G−1 F 0 + E − ΣBT G−1 B CT (CCT )−1 G0
証明は C.11.2 章 (316 頁)。
C.6 トイモデル
275
系 17 (拘束条件の変更、変更箇所が 1 列の場合) 制約条件行列 C の変更が最後の
(
一列に限定されており、ベクトル d を用いて C′ − C = 0
(
)
場合、、補題 44 の R = R′
G
0
AT
(
(
)
r 、T = T′
t 、U =
−1
P Q
A
·
S
C =
·
·
0
· ···
0
0
CT
(
の各成分のうち、もとの共分散行列
U′
u
uT
U
···
U′
u
T
U
u
R′
T′
U′
uT
0
)
)
d と書ける
と書いて
r
t
u
U
)
(
、およびブロック行列 S、 T′
)
t
が既知ならば、変更後の共分散行列が以下のように求められる。
ξ = dT Sd
τ = dT t + 1 = tT d + 1
1
C= 2
τ − ξU
(
(
U′ + C U T′ ddT T′ − τ T′ duT − τ udT T′ + ξuuT )
T
Σnew =
T
)
−CU T′ d + Cτ u
−CU dT T′ + Cτ uT
T
)
CU
証明は C.11.2 章 (319 頁)。
以上で、位置天文学でのパラメータ推定に利用できる漸化式が導かれた。
C.6 トイモデル
C.6.1 同じ観測を繰り返す場合
このサブセクションでは、補題 13 の適用例を見る。
推定パラメータのベクトルは一次元で a =
( )
a とする。観測値は推定パラメータを
直接測定するものとすると、等式制約条件は xi − a = 0, (i = 1, . . . , n) である。このと
き、A は
(
ATn = −1
)
. . . −1
の一次元列ベクトルだから、新たな拘束条件を設けなくても問題は well defined である
(補題 9)。
今、補題 13 の記号に従って、追加する観測に伴うものは添え字なし、n 番目までの観
測値をあわせたものを下月添え字 n をつけて表すものとする。n 番目の観測の誤差分散は
σn2 、また観測値は xn とする。
一回目の観測は、
より、
( )
X1 = 1 ,
( )
A1 = −1 ,
(
Λ
∆1
となり、
)
( )
Σ1 = σ12 ,
(
=
0 1
1 σ12
)(
( )
σ1 = σ12
F0
0
)
∆1 = a1 − a = x1 − a
276
付録 C 位置天文観観測データの解析と感度解析
となる。仮置きのパラメータ値 a は消されて、一回目の観測によるパラメータの推定値は
観測値そのもの、x1 となる。
第 n 回目の観測を追加することを考える。この場合、
( )
X= 1 ,
( )
A = −1 ,
( )
σ = σn2
である。また、Σn は 1 × 1 行列だから、この要素を Σn と書く。補題 13 の式より
Σ2n−1
=
2
σn + Σn−1
Σn = Σn−1 −
(
1
1
+
σn2
Σn−1
)−1
がでて来る。これと、n = 1 の値より
(
Σn =
n
∑
1
2
σ
i=1 i
)−1
となり、複数の観測での誤差分散の合成としてよく知られた式がでて来る。
次に、推定値は補題 13 の式より
∆n ≡ an − an−1 = Σn
1
(xn − an−1 )
σn2
この式を整理して n = 1 の場合から順次解けば、
an
an−1
an−1
xn
−
= 2 − 2
Σn
Σn
σn
σn
( n
)
∑
1
1
an
an
an−1
an−1 =
−
−
2 − σ2
Σn
σ
Σ
Σ
n
n−1
n
i=1 i
xn
= 2
σn
n
∑
an
xn
=
Σn
σ2
i=1 i
( n
)−1 n
∑ 1
∑ xn
an =
2
σ
σ2
i=1 i
i=1 i
となり、よく知られているように誤差分散の逆数を重みとした各観測値の加重平均と
なる。
C.6.2 張り合わせ方向の誤差蓄積のモデル化
モデル
張り合わせでは、隣接視野の原点を、星を頼りに推定している。張り合わせ方向への誤
差蓄積を、以下のようにモデル化してみる。
C.6 トイモデル
277
問題 18 (張り合わせ方向誤差蓄積のモデル化) 座標値 ai , (i = 0, · · · , n) について、
誤差 σ で ai+1 − ai , (i = 0, · · · , n − 1) の測定を行なう。この時、誤差はどう蓄積す
るか。n に対する依存性と係数を含めて推定せよ。
⟨
⟩
(答え 1) 端の 1 点の座標値を既知とする場合、(Σn )max = nσ 2 、 (Σn )diag = nσ 2 /2
となる。
(答 え 2) 点 の 座 標 値 の 平 均 が 既 知 と す る 場 合 、(Σn )max =
⟨
⟩ n(n + 2)
(Σn )diag =
σ 2 となる。
6(n + 1)
n(2n + 1) 2
σ 、
6(n + 1)
この問題設定は、n + 1 個の星の位置を以下のような観測から推定する問題となる。
• 同じ観測プレートに二点の星がある。
• 隣接するプレートは必ず一つの星を共有する。
• 観測は、星のプレート上の一次元座標値を観測する。従って、同じプレートでの二
つの星の観測が、隣接する星の座標値の差の観測である。これを一セットとして、
n セットの観測が行なわれる。
• 共通する星の位置座標は等しいことを仮定して、隣接するフレーム原点座標の差が
推定可能である。
星が多数あったとしても、3 つの観測プレートにまたがる星がなければ、隣接プレートに
共通する星全体の重心などがここでの推定量だと考えて、観測の精度を共通する星の数 N
√
に対して σ/ N 程度と考えれば、同じ考察が成立する。
単純な統計解析
隣接する視野の張り合わせに対し、張り合わせ方向には N (0, σ 2 ) に従う誤差があるとす
√
る。この σ は、例えば共有する星が N 個あれば一回の観測誤差 σ1obs に対して σ1obs / N
のような数値を対応させれば良い。
張り合わせ方向のプレート原点座標を ai と書く。隣接する視野同士の関係は、
ai+1 − ai = ϵi , ϵi ∈ N (0, σ 2 )
を仮定することに相当する。この式より、
an − a0 =
n−1
∑
(ai+1 − ai )
i=0
=
n−1
∑
ϵi ≡ ϵpara
i=0
と書けば、ϵi の独立性より
となる。
ϵpara ∈ N (0, nσ 2 )
(C.6)
278
付録 C 位置天文観観測データの解析と感度解析
行列生成
推定すべきパラメータは ai , (i = 0, · · · , n) であり、観測量は ai+1 −ai , (i = 0, · · · , n−1)
であるから、等式制約条件は
Gi (x, a) = xi + ai − ai+1 = 0, (i = 0, · · · , n − 1)
となる (xi は観測量)。これに従って、
1
.
∂G
∂G
= Y = I(n×n) ,
=B=
.
∂x
∂a
.
.
−1 .
.
1 −1 .
.
.
.
.
. 1
.
.
.
(n×(n+1))
.
.
.
.
.
.
−1 .
1 −1
となる。
共分散行列が求められるためには、定理 12 に現れる行列、即ち定理 8 の式 (C.5) の行
(
列
XσXT
AT
)
A
0
が正則でなければならない。このためには、A の各列が一次独立であ
ることは必要条件である (補題 9) から、横長の行列 A では共分散行列は求められない。
行列 B の rank を計算すると、n となるので、この等式制約条件の場合は、拘束条件 C を
一つ加えれば問題が well defined になる。
最も機械的な方法は、B の各行に直交するベクトルを作るとである。この場合、全ての
要素が同じ値になる。これは、H(a) =
∑
(
ai + const = 0 であり、CT = 1
)
... 1
i
である。これは、ai の平均値が既知であることを要求している。
一般には、B の各列から作られるベクトルは、要素の総和がゼロであるようなベクトル
に限られる。従って、要素の総和がゼロでないベクトルをとれば、B の各列と一次独立で
ある。例えば、C のどれかの要素が一つだけゼロでない場合も、B の全ての行と一次独立
である (直交はしていない)。簡単のため、a0 が既知である場合を考える。
以下、観測数が n の場合の行列 X、A、σ 、Σ やベクトル a、x、F 、∆ を、下つき添
字で Xn などと書くことにする。
Case 1
まず、a0 が既知である場合を考える。方針としては、
1
0
1
−1
0
0
1
0
1
1
0
0
−1
(
0
−→ Σ1 = 0
0
0
0
0
1
)
に対して新たな観測を
1
0 0 1 −1
0
1 0 0 1
0
0 0 1 0
1
0 1 0 0
−1 1 0 0 0
0 −1 0 0 0
0
−1
0 0
0
0 1
−→
Σ
=
2
0
0 1
0
0
0
1
2
C.6 トイモデル
279
この行列の 2 列目と 6 列目、2 行目と 6 行目のが追加されたものであり、この行列変更に
伴う Σ の変更を、補題 14 を適用して計算する。
(
X1 =
)
(
1 0
1
, A1 =
0 0
1
であり、
(
X1 σ1 XT1
AT1
A1
0
)−1
)
( 2
−1
σ
, σ1 =
0
0
0 0 0
0 0 1
=
0 1 0
−1 0 0
)
0
0
−1
(
1
, Σ1 = 0
0
0
−σ 2
0
σ2
)
となる。
xn − f (a, b) = xn + an+1 − b = 0
β=1
(
)
α = − 0 ... 0 1
(
)−1
s = σ 2 + (Σn−1 )nn
ところで、β = 1 より (Σn )n+1,n+1 = 1/s となる。これと、s の式より、(Σn )n+1,n+1 = n
となる。また、Σn の i ≤ n, j ≤ n 成分は Σn−1 の ij 成分と同じである。
(
Σn
)
i,n+1
(
)
(
)
= − Σn−1 α/β i = Σn−1 in
従って、
0
0
0
2
Σn = σ ·
·
·
0
0 0
1 1
1 2
· ·
· ·
· ·
1 2
···
···
···
···
min(i, j)
···
···
0
1
2
·
·
·
n
となる。
これより、
2
σii
=n
i
σ2
n
1 ⟨ 2⟩
n
1 ∑
σ
i=
=
ii
2
σ
n + 1 i=1
2
max
である。
Case 2
拘束条件が、
n+1
∑
ai = const
i=1
の場合を考える。Case 1 で得られている解
1
0
1
−1
0
0
1
0
1
1
0
0
−1
(
0
−→ Σ1 = 0
0
0
0
0
1
)
280
付録 C 位置天文観観測データの解析と感度解析
から、Σ1 が既知であるから補題 15 により全行列
−1
−1
0 0
0 0
0
=
0 1
0
1 1
0
1 0 1
0 0 1
1 1 0
−1 0 0
1
1
0
−1
0
1
0
0
を求め、これに拘束条件の変更による共分散の変更を計算する補題 44 を適用することに
より、
1
0
1
−1
0 1
0 1
1 0
1 0
−1
(
1
−→ Σ′1 = 1/4
−1/4
0
0
)
−1/4
1/4
を求める。この手続きにより、Σ′n を求める。
Σ1
↓
Σ′1
−→ Σ2
↓
Σ′2
−→ · · ·
−→ Σn
↓
Σ′n
···
まず、Case 1 の場合の逆行列を構成するブロック行列を求める。
σ 2 I(n)
0
T
An
0
0 1
1
0
..
.
An
0 ...
0
−1
0
P
= QT
RT
Q
S
TT
R
T
U
0
(
と書いた場合に、定理 12 により U は Case 1 で求めた −Σn である。また、
X
A
)
AT 0
の逆行列は、A が正則な時には X によらず左上ブロックがゼロ行列になる。A は正方行
列であり、補題 9 の問題が well defined であるための条件が A の正則性を保証するので、
P = 0, Q = 0, S = 0 である。補題 15 の各行列は、
(
B(n×n+1) = An ,
C(1×n+1) = 1 0 · · ·
)
0 ,
G = σ 2 I(n)
である。T は以下のように求められる。
CT T = E + BT G−1 BU
(
)
C1i T1j = E + BT G−1 BU ij
(
)
1 T
T1j = E − 2 B BΣn
σ
1j
∑(
)
T
= δ1j −
B B 1i min(i − 1, j − 1) = 1
(
T= 1
i
...
)
1 = tT
行列 R は共分散行列を求める際は不要なので、ここでは省略する。
C.6 トイモデル
281
次に補題 44 の適用である。
2 (n)
−1
σ I
0
An
0
0 1 . . . 1
1
−
T
..
0
An
.
1
σ 2 I(n)
0
T
An
T
Qd
= − SdT
(
ここで、
(
dT = 0 1
···
−1
An
1 0 ...
0
0
0
)−1 ( T
I + dtT
dQ
RT
−Σn
R
dSdT
tT
I + tdT
−Σn
tdT
0
0
1
0
..
.
dS dtT
t −Σn
)
)
1
である。S = 0 であるから、
(
T
dSd
I + tdT
T
I + dt
−Σn
(
)−1
I + dtT
)−1
(
(
) )−1
(
)−1
T T
I
+
dt
Σn I + dtT
=
(
)−1
I + dtT
1
dtT
=I−
1 + tT d
((
)
T T
I + dt
)−1
0
であり、このサブセクションでの共分散を前サブセクションのものと区別すため Σ′n と書
き、dΣn = Σ′n − Σn と書くと、
(
)−1
(
)−1 T
(
)−1
dΣn = −tdT (I + dtT )T
Σn I + dtT
dt + tdT (I + dtT )T
Σn
(
)
−1
+Σn I + dtT
dtT
)
)
(
(
1
1
T
T
td
dt
dtT
= −tdT I −
Σ
I
−
n
1 + tT d
1 + tT d
)
(
)
(
1
1
T
T
+tdT I −
td
dt
dtT
Σ
+
Σ
I
−
n
n
1 + tT d
1 + tT d
(
)
1
1
T
T
T
T
= −(
td
Σ
dt
+
td
Σ
+
Σ
dt
)
n
n
n
2
1 + tT d
1 + tT d
ここで、tT d = n、
0
1
T
td = 0 ...
0 1
···
..
.
···
1
.. ,
.
)T
(
dtT = tdT
1
これと、Case 1 で求めた Σn の要素の値を用いて、
(
tdT Σn
)
=
ij
∑
k
(Σn )kj =
n(n + 1) (n + 2 − j)(n + 3 − j)
−
2
2
j(j − 1)
= (j − 1)(n + 1) −
2
)
(
∑
=
(Σn )kl = n3 /3 + n2 /2 + n/6
tdT Σn dtT
ij
kl
= (n + 1)3 /3 − (n + 1)2 /2 + (n + 1)/6 − 1
282
付録 C 位置天文観観測データの解析と感度解析
となり、
dΣn = −
2n3 + 3n2 + n
j(j − 1) + i(i − 1)
+ (i + j) − 2 −
2
6(n + 1)
2(n + 1)
より、対角成分は
(Σ′n )ii = −(i − 1) +
2n3 + 3n2 + n i(i − 1)
+
6(n + 1)2
n+1
最大値は両端、即ち i = 1 と i = n + 1 であり、
Σ′n |max =
2n3 + 3n2 + n
6(n + 1)2
また平均値も計算できて、
n+1
1 ∑
1 n(n + 1)
n
(i − 1) =
=
n + 1 i=1
n+1
2
2
n+1
1 ∑
n(n + 2)
1 n(n + 1)(n + 2)
=
i(i − 1) =
n + 1 i=1
n+1
3
3
n 2n3 + 3n2 + n n(n + 2)
+
+
2
6(n + 1)2
3(n + 1)
(
)
n
2
=
−3(n + 1) + 2n2 + 3n + 1 + 2(n + 1)(n + 2)
2
6(n + 1)
n(n + 2)
=
6(n + 1)
⟨Σ′n ⟩ = −
C.6.3 Case 2 の別解
Σ′n − Σn を求めるのではなく、Σ′n − Σ′n−1 を求める方針で考えてみよう。
1 0 1 −1
(
)
0 0 1 1
−→ Σ′1 = 1/4 −1/4
1 1 0 0
−1/4 1/4
−1 1 0 0
に補題 14 を適用し、同じ拘束条件で観測とパラメータを一つ追加する。
1
0 0
0
1 0
0
0 0
1
0 1
−1 1 1
0 −1 0
1 −1
0 1
1 1
0 0
0 0
0 0
0
−1
1 −1
1
0
−→ Σ′′2 = −1 1
0
4
−1 1
0
0
−1
1
5
さらに、補題 15 と補題 44 を適用することにより
1
0 0
0
1 0
0
0
0
1
0
1
−1 1 1
0 −1 1
1 −1
0 1
1 1
0 0
0 0
0 0
0
−1
5 −1 −4
1
1
−→ Σ′2 = −1 2 −1
0
9
−4 −1 5
0
0
C.6 トイモデル
283
を求める。Case 2 の先ほどの場合と比較した利点は、拘束条件の変更数は少ないので、補
題 15 や補題 44 で求めなければならない要素数が少ないことがある。
まず第一段階目は、
Σ′′n
(
=
Σ′n−1
T ′
−α Σn−1 /β
−Σ′n−1 α/β
1/β 2 s
)
である。ここで、
(
α = − 0 ···
0 1
)T
β=1
∑
)
(
1
= σ2 +
αi αj Σ′n−1 ij
s
ij
である。第二段目は、
C.6.4 張り合わせ垂直方向
モデル
張り合わせ垂直方向の誤差を、問題 19 のようにモデル化する。まず、このモデル化の
意味を述べる。
垂直方向の誤差は、垂直方向に張り合わせがずれている効果と、張り合わせの角度を誤
る効果が合わされたものになることに注意を要する。垂直方向に張り合わせがずれている
効果は、張り合わせ方向と同様に評価できる。そので、ここでは角度がずれた効果がどの
ような影響を持つかの評価に集中する。この評価が
誤差は
√
n より緩やかなものであれば全体の
√
√
n で蓄積すると考えられ、 n より急激なものであれば角度のずれの誤差が主要
因となる。
張り合わせ垂直方向の座標測定値の残差を ai と書く。i 番目のプレートの測定で生じる
誤差は、ai+1 − ai で表される。ここには、角度情報が含まれている。この誤った角度を
元に i + 1 番目のプレートを張り合わせることをモデル化すると、角度の基準そのものが
ai+1 − ai であるから、
ai+2 − ai+1 = ϵ′i , ϵ′i ∈ N (ai+1 − ai , σ 2 )
となるはずである。あるいは、ϵi ∈ N (0, σ 2 ) を用いれば、
ai+2 − ai+1 = ai+1 − ai + ϵi
(C.7)
と書かれる。さらに、
a2 − a1 = ϵ1
と考えられる。そこで、パラメータ ai に対する以下のような測定を行った場合の誤差の
蓄積が、張り合わせ垂直方向の誤差の蓄積をモデル化したものと考えられる。
284
付録 C 位置天文観観測データの解析と感度解析
問題 19 (張り合わせ垂直方向誤差蓄積のモデル化) 座標値 ai , (i = 1, · · · , n + 2) に
対して、誤差 σ で ai − 2ai+1 + ai+2 , (i = 1, · · · , n) の測定を行うというモデル化を
行う。このとき、誤差の蓄積を、n 依存性と係数を含めて推定せよ。
1
1
1
(答え 1) 端のプレートを基準にとった場合、max Σii = n + n2 + n3 、⟨Σii ⟩ =
6
2
3
)
(
n
1
5
1 2
1 3
+ n+ n + n
n + 2 6 12
3
12
(答 え ( 2) 星 の 位 置 の 平 均 値 と) 平 均 勾 配 を 抑 え た と き ⟨Σii ⟩ =
n
11
7 2
1 3
1
+
n+
n +
n
n + 2 12 180
360
360
(答 え (3) 拘 束 条 件 を 観 測 方 程 式)と 直 交 す る よ う と っ た と き ⟨Σii ⟩ =
n
3
5
4 2
1 3
+ n+
n +
n
n + 2 35 84
105
420
統計的議論
n
∑
(ai − ai−1 ) =
i=1
an − an−1 =
n
∑
i=2
n
∑
(ai−1 − ai−2 ) +
n
∑
ϵi
i=1
ϵi
i=1
と書かれる。さらにこれを辺々足しあわせて
an − a0 =
n
∑
(aj − aj−1 )
j=1
=
=
=
j
n ∑
∑
j=1 i=1
n ∑
n
∑
ϵi
ϵi
i=1 j=i
n
∑
(n − i + 1) ϵi ≡ ϵperp
i=1
この ϵperp が従う分布の分散 σp は、以下のように評価される。
n
n
∑
∑
σp2
1
1
1
2
=
(n − i + 1)
n2 = n3 + n2 + n
σ2
3
2
6
i=1
i=1
即ち、n が十分大きい時は ϵperp ∈ N (0, n3 σ 2 /3) となる。
行列生成
観測は、
xi = ai+2 − 2ai+1 + ai
であるから、Y = I、σ = σ 2 I
−1 2
. −1
B=
.
.
.
.
−1 .
2 −1
..
..
.
.
.
−1
.
.
..
.
2
.
.
−1
C.6 トイモデル
285
となる。次に、補題 10 を用いて C を構築する。B は n × n + 2 行列で、各行は一次独立
であるから、拘束条件は 2 個必要である。
(
1
C=
1
0 0···
−1 0 · · ·
)
0
0
(C.8)
は一つの解である。これは、一枚目のプレートの原点と方向を正しいと仮定して連結した
ものに相当する。これを Case 1 で検討する。
全ての星の位置の重心と、連結されたプレートの全体の平均的な勾配が既知であること
(
を仮定したケースも解ける場合である。C の二番目の行として 1
0···
0
)
−1 と置
けばよいが、行列の変形を最終列のみに押さえるため、これに C の一番目の行を加えた
(
C=
1 1···
2 1···
1 1
1 0
)
(C.9)
を Case 2 で検討する。
最後に、B の全ての行ベクトルに直交するベクトルを計算する。C の一行をとり、その
成分を ci と書くと、これが B の各行と直行するという条件から、
ci+2 = −ci + 2ci+1
となる。自由度 2 に相当して c1 と c2 を使ってこれらの漸化式を解けば、
ci = −(i − 2)c1 + (i − 1)c2
となる。この式は i ≥ 3 で求めた漸化式だが、i = 1, i = 2 でも成立している。c1 =
1, c2 = 1 ととれば、ci = 1, ∀i である。さらに、このベクトルとも直交する解を求める。
その条件は、
0=
n+2
∑
ci
i=1
=
n+2
∑
(−(i − 2)c1 + (i − 1)c2 )
i=1
(n + 2)(n + 1)
(n + 2)(n − 1)
c1 +
c2
2
2
n+2
=−
((n − 1)c1 − (n + 1)c2 )
2
=−
となる。定数倍の自由度があるので c1 を適当に決めると、ci = −
n+1
+ (i − 1) という
2
解がある。C の二つの行ベクトルは一次独立であればよくて相互に直交している必要は
(
無いので、
C=
の場合を Case 3 で検討する。
1 1 1
0 1 2
···
···
1
1
n n+1
)
(C.10)
286
付録 C 位置天文観観測データの解析と感度解析
Case 1
n = 1 のケース、
1 0
0 0
0 0
−1 1
2 0
−1 0
0 −1 2
0
1
0
0
1 −1
1
0
0
−1 0
0
0
0
0
−1
0
−1
0
0
0
= 0
0
0
0
0
−1
0
0
0
0
1
1
1
0
0
0
0
−1
−2
0 0
1 1
0 −1
0 0
0 0
0 0
−1
1
−2
0
0
−1
から出発する。この場合の結果は、上の統計的考察に一致するはずである。系 14 を、
(
α = 0 ···
0 1
−2
)1×(n+1)
,
β=1
の場合に適用する。また、Case 1 の場合は
(
Σn−1
−αT Σn−1 /β
Σn =
−Σn−1 α/β
1/β 2 s
)
より Σn は Σm , m > n の左上部分行列になっているので、要素の値を議論するときに、
必要の無い限り観測数の index を省略する。
Σn+2,n+2 = s−1 = σ 2 +
∑
αi αj Σij
ij
Σi,n+2
= σ 2 + Σnn − 4Σn,n+1 + 4Σn+1,n+1
= −Σi,n + 2Σi,n+1 ,
i<n+2
最大値は
max Σii = Σn+2,n+2 =
n
∑
i=1
i2 =
1
1
1
n + n2 + n3
6
2
3
今、対角和に興味があるので、
n+2
∑
Σii =
i=1
1
5
1
1
n + n2 + n3 + n4
6
12
3
12
Case 2
1
0
0
−1
2
−1
対角和は
0 0
0 0
0 0
1 1
1 0
1 −1
−1
1
1
0
0
0
n+2
∑
i=1
−1
2 −1
0
0
0
1 1
0
0 −1
0
= 1 0
0 0
36
−6 −6
12 12
0 0
0 0
−6 30
Σii =
0
0
0
18
0
−18
−6 12
−6 12
18
0
−1 2
2 −4
−1 2
11 2
7 3
1 4
1
n+
n +
n +
n
12
180
360
360
−6
30
−18
−1
2
−1
C.6 トイモデル
287
Case 3
1
0
0
−1
2
−1
−1
0
0
0
−1
0
0
0
1
0
1
0
0
2
=
−6
30
−18
0
36
12 12
0
0
−6 −6 18
0
0 −1 2
0 1 1
0 0 1
0 0 0
1 0 0
2 0 0
0
0
0
1
1
1
対角和は
n+2
∑
Σii =
i=1
−6 12 −6
30
12 −6
−18 0
18
−1
2 −1
2
−4 2
−1
2 −1
3
5
4 3
1 4
n + n2 +
n +
n
35
84
105
420
C.6.5 同じ観測
C.6.1 章の議論は、拘束条件がなくて閉じている場合には容易に拡張できるが、拘束条
件がある場合は同様にはいかない。そこで、拘束条件 C を持つ系に関して同じ観測を繰
り返す場合を考えてみよう。星に関するパラメータ d とプレートに関するパラメータ e
に対して制約条件 F (x, d, e) を与え、D =
∂F
∂F
および E =
は各観測で共通である
∂d
∂e
とする。一回の観測では、以下のような行列の反転による共分散行列の導出問題となる。
YσYT
ET
0
DT
このとき、
(
YσYT
ET
E
0
D
0
C
0
E 0
0
0
0
0
0 CT
)−1
(
=
P
QT
Q
R
)
が存在するとので、定理 22 を用いて、
(
S
U
T
V
)−1
(
=
S −1 + S −1 T W −1 U S −1
−W −1 U S −1
−S −1 T W −1
W −1
)
W = V − U S −1 T
(
)
0
C
=
C T −DT P T D
さらに系 24 を使えば
(
0
ST
S
T
(
)−1
=
(
)−1
− ST −1 S T
(
)−1
T −1 S T ST −1 S T
)
)−1
ST −1 S T
ST −1
(
)−1
T −1 − T −1 S T ST −1 S T
ST −1
(
従って、一回の観測に対応する共分散行列は
(
)−1
C(DT P T D)−1
Σ1 = (DT P T D)−1 − (DT P T D)−1 C T C(DT P T D)−1 C T
で与えられる。
288
付録 C 位置天文観観測データの解析と感度解析
同じスケジュールで n 回観測を繰り返すとすれば、
YσYT
ET
.
0
0
0
DT
E
0
.
0
0
0
0
.
.
..
.
0
0
0
0
.
YσYT
ET
0
DT
.
.
···
···
D
0
..
.
D
0
C
0
0
0
..
.
.
E 0
0
0
0
0
0 CT
を反転して共分散行列を求める問題となる。この行列の左上ブロックは
YσYT
ET
.
0
0
E
0
.
0
0
.
.
..
.
.
.
0
0
.
YσYT
ET
−1
P
0
QT
0
=
.
.
0
E
0
0
Q
R
.
.
..
.
.
0
0
0
0
.
P
QT
.
.
0
0
.
Q
R
となる。全行列の逆行列の右下ブロック W −1 は
(
0
CT
W =
(
=
0
CT
C
0
)
(
−
0 ···
0 ···
0
DT
C
−nDT P T D
0
DT
)
従って、
Σn =
P
T
)
Q
0
0 .
0
0
Q
R
.
0
0
.
.
..
.
.
.
0
0
.
P
QT
0
0 D
0
0 0
.. ..
.
. .
Q 0 D
0 0
R
1
σ1
n
となる。この行列の右下ブロックが共分散行列になるので、やはり
√
n 則が成り立つ。
C.7 位置天文観測の adjustment parameter
位置天文観測での adjustment parameter は、星のパラメータとプレートのパラメータ
の二種類がある。我々が興味あるのは星のパラメータであり、プレートパラメータはこれ
を得るための補助的なものである。
C.7.1 観測量に押し込むことは出来ないことの証明
まず、この補助的なパラメータを X の形に押し込むことは出来ないかを検討する。行列
YσYT
0
BT
0
0
CT
B
C
0
の部分行列 B のうち、星のパラメータに由来する行列を D、プレートのパラメータに由
来する行列を E と書く。拘束条件は星のパラメータのみにかかるものとし、行列 C を
C.7 位置天文観測の adjustment parameter
(
C→ C
289
)
0 と再定義する。考える行列は
YσYT
0
DT
ET
D E
C 0
0 0
0 0
0
0
CT
0
となる。このブロック行列の行と列を入れ替え、
YσYT
ET
0
DT
E 0
0
0
0
0
0 CT
D
0
C
0
と書くと、
Zτ ZT
0
FT
0
0
CT
F
C ,
0
Zτ ZT =
(
YσYT
ET
)
E
,
0
F=
( )
D
0
と考えることが出来る。与えられた YσY T 及び E から Z と τ が構築できれば、問題を
別の観測方程式と観測共分散行列に従う観測とみなすことが出来る。
まず、τ は新しい観測セットでの共分散行列となるので、正定値対称行列である。対称
行列は、直交行列で対角化できるので、
τ = S′ L′ S′
と置く。ここで、S′ は対称行列であり、S′ S′
T
T
= E であり、また L′ は対角行列であり、
各対角成分は τ の固有値となる。今、S の各行を適当な定数倍した行列を考えれば、
τ = SLST
として L の対角成分は固有値の符号となる。L は共分散行列であることから半正定値で
なければならず、対角成分は 1, 0 のいずれかであり −1 は含まれない。
(
YσYT
Zτ Z = (ZS) L (ZS) =
ET
T
T
E
0
)
であるような ZS を探す問題となる。
今、τ の正の固有値の数を l、ゼロ固有値の数を m − l とし、l 次の実列ベクトル
ai , (i = 1 · · · n) および m − l 次の実列ベクトル bi , (i = 1 · · · n) を導入し、
(
)
a1 · · · an
T
(ZS) =
b1 · · · bn
と書く。このとき、
T
(ZS) L (ZS) = ai · aj
となる。ii, (i > l) 成分はゼロであることから、ai = 0, (i > l) となり、ij, (i > l > j) 成
分に非ゼロ要素が存在することと矛盾する。従って、共分散行列 τ が負固有値を持たない
という仮定が誤っていることなり、このような観測を想定できない。
290
付録 C 位置天文観観測データの解析と感度解析
T
T
負の固有値を許せば、以下のような解が実際に作れる。
Zτ Z が3 次ので Zτ Z =
σ2 0 1
σ2 0 0
1 . .
0 σ 2 1 の時、τ = 0 0 1 の場合の、Z = . . . の型の解は、
1
1 0
0 1 0
. 1 0
1√
Z = 1 ± 2
0
σ2
0
0
である。また、τ =
0
σ2
0
0
0
0 √
−σ 2 ∓ σ 2 2
1
1
1
0
0
1
0 0
の場合の、Z = 0
0 1
σ −2
1 0
0
1
Z= 0
σ −2
0
1
σ −2
0
0
l
0
0
0
.
.
1
.
σ −2
.
の型の解は、
.
.
−σ −2 /l
である。
C.8 本分析に関連する行列の定理
−1
補題 20 (Sherman-Morrison の公式) 行列 A および D + DCA
BD が正則な
とき、A + BDC も正則で、
(A + BDC)
−1
(
)−1
= A−1 − A−1 BD D + DCA−1 BD
DCA−1
が成り立つ。特に B = b、C = cT , D = 1 のとき
(
A + bcT
)−1
= A−1 −
1
1+
cT A−1 b
(
A−1 b
)(
cT A−1
)
証明:
)
(
(
)−1
DCA−1
(A + BDC) A−1 − A−1 BD D + DCA−1 BD
(
)−1
DCA−1
= E + BDCA−1 − BD D + DCA−1 BD
(
)
−1
DCA−1
−BDCA−1 BD D + DCA−1 BD
(
)(
)−1
DCA−1
= E + BDCA−1 − B D + DCA−1 BD D + DCA−1 BD
=E
C.8 本分析に関連する行列の定理
291
逆も同様。
(
)
(
)−1
A−1 − A−1 BD D + DCA−1 BD
DCA−1 (A + BDC)
(
)−1
= E + A−1 BDC − A−1 BD D + DCA−1 BD
DC
(
)
−1
−A−1 BD D + DCA−1 BD
DCA−1 BDC
(
)−1 (
)
= E + A−1 BDC − A−1 BD D + DCA−1 BD
D + DCA−1 BD C
=E
(証明終り)
系 21 (Inversion lemma) 行列 A、D 及び D + CA
A + BD
−1
B が正則であるとき、
−1
C も正則で、
(
)−1
(
)−1
A + BD−1 C
= A−1 − A−1 B D + CA−1 B
CA−1
が成り立つ。
証明: この補題は補題 20 の特殊な場合である。補題 20 の行列 D を D
−1
と書き換え、D
の正則性を仮定すれば、
(
A + BD−1 C
)−1
(
)−1 −1
= A−1 − A−1 BD−1 D−1 + D−1 CA−1 BD−1
D CA−1
(
)−1 −1
= A−1 − A−1 BD−1 D−1 DD−1 + D−1 CA−1 BD−1
D CA−1
(
)
−1
= A−1 − A−1 BD−1 D D + CA−1 B
DD−1 CA−1
(
)−1
= A−1 − A−1 B D + CA−1 B
CA−1
(証明終り)
補題 22 (ブロック行列の逆行列) 行列全体が正方行列であり、部分行列 A 及び
D − CA−1 B が正則であるブロック行列は正則で、
(
)−1 ( −1
A B
A + A−1 BS−1 CA−1
=
C D
−S−1 CA−1
が成り立つ。ここで、
−A−1 BS−1
S−1
)
S = D − CA−1 B
である。
証明:
(
P00
P10
P01
P11
)
(
≡
A
C
B
D
)(
A−1 + A−1 BS −1 CA−1
−S −1 CA−1
−A−1 BS −1
S −1
)
(
E
=
0
0
E
)
292
付録 C 位置天文観観測データの解析と感度解析
である。なぜなら、
(
)
P00 = A A−1 + A−1 BS −1 CA−1 − BS −1 CA−1
P01
P10
= E + BS −1 CA−1 − BS −1 CA−1 = E
= −AA−1 BS −1 + BS −1 = 0
(
)
= C A−1 + A−1 BS −1 CA−1 − DS −1 CA−1
= CA−1 + CA−1 BS −1 CA−1 − DS −1 CA−1
(
)
= CA−1 − D − CA−1 B S −1 CA−1 = 0
P11 = −CA−1 BS −1 + DS −1
(
)
= D − −CA−1 B S −1 = E
が示される。また、
(
Q00
Q10
Q01
Q11
)
≡
( −1
A + A−1 BS −1 CA−1
−S −1 CA−1
−A−1 BS −1
S −1
)(
A
C
B
D
)
=
(
E
0
0
E
)
について、
(
)
Q00 = A−1 + A−1 BS −1 CA−1 A − A−1 BS −1 C
Q01
= E + A−1 BS −1 C − A−1 BS −1 C = E
(
)
= A−1 + A−1 BS −1 CA−1 B − A−1 BS −1 D
= A−1 B + A−1 BS −1 CA−1 B − A−1 BS −1 D
(
)
= A−1 B − A−1 BS −1 D − CA−1 B = 0
Q10 = −S −1 CA−1 A + S −1 C = 0
Q11 = −S −1 CA−1 B + S −1 D
(
)
= S −1 D − CA−1 B = E
(証明終り)
系 23 (2 次ブロック行列) [Einchhorn and Russell, 1976]
T, U が 正 則 か つ
−1
V − U が正則の場合、
(
)−1
(
)−1 (
T V
T − VU−1 VT
)−1 T −1
= ( T −1
VT U
V T V−U
V T
T
V T
(
)−1 )
T−1 V VT T−1 V − U
(
)−1
U − VT T−1 V
(C.11)
−1
証明: 補題 22 の特殊な場合である。T − VU
A = T,
T
V の正則性は Inversion lemma より。
B = CT = V,
D=U
として、
(
T
VT
V
U
)−1
(
)−1
A B
≡
C D
( −1
T + T −1 V (U − V T T −1 V )−1 V T T −1
=
−(U − V T T −1 V )−1 V T T −1
−T −1 V (U − V T T −1 V )−1
(U − V T T −1 V )−1
となる。また、Inversion Lemma(系 21) より
T −1 + T −1 V (U − V T T −1 V )−1 V T T −1 = (T − V U −1 V T )−1
が成立する。
)
C.8 本分析に関連する行列の定理
293
(証明終り)
系 24 [Einchhorn and Russell, 1976] A が正則かつ BT A−1 B が正則の場合、
(
A
BT
B
0
(
)−1
=
(
)−1 T −1
A−1 − A−1 B BT A−1 B
B A
( T −1 )−1 T −1
B A B
B A
(
)−1 )
A−1 B BT A−1 B
(
)−1
− BT A−1 B
証明: これは、補題 22 の特殊な場合である。
C = BT ,
と置けば、
D=0
S = −B T A−1 B
であることに注意して直接代入すればよい。
さらに、B が正則な正方行列の場合は、
(
)−1 T
E ≡ A−1 B BT A−1 B
B
BT E = BT
( )−1 T
E = BT
B =I
となり、左上ブロックは零行列となる。
(証明終り)
系 25 [Einchhorn and Russell, 1976] A が正則かつ BT A−1 B が正則の場合、
(
A
BT
の時
B
0
)( ) ( )
x
a
=
y
0
y = (BT A−1 B)−1 BT A−1 a
証明: 上の補題に代入すればよい。あるいは
x = −A−1 (By − a)
BT x = −BT A−1 (By − a) = 0
BT A−1 By = BT A−1 a
[
]−1 T −1
B A a
y = BT A−1 B
(証明終り)
補題 26 (2 次ブロック行列の反転 (対角ブロックが特異の場合)) 同じサイズの正方
行列からなる対称な二次ブロック行列で、対角ブロックが正則であることが保証され
(
ていない場合でも、非対角ブロックが正則かつ B − A BT
(
A
BT
(
)−1
)−1 (
B
−(BT )−1 C B − A(BT )−1 C
(
)−1
=
C
B − A(BT )−1 C
)−1
C が正則ならば、
)
( T
)−1
B − CB−1 A
(
)−1
−B−1 A BT − CB−1 A
294
付録 C 位置天文観観測データの解析と感度解析
証明: 今、A, C, P, R が対称なので、
(
A
BT
B
C
)(
P
QT
Q
R
)
=0
P A + QB T = E
P B + QC = 0
AQ + BR = 0
B T Q + CR = E
Q = (B T )−1 − P A(B T )−1
P B = −QC
= −(B T )−1 C + P A(B T )−1 C
P = −(B T )−1 C(B − A(B T )−1 C)−1
Q = (B T )−1 + (B T )−1 C(B − A(B T )−1 C)−1 A(B T )−1
(
)−1
= B T − CB −1 A
R = −B −1 AQ
(
)−1
= −B −1 A B T − CB −1 A
このとき、
B T Q + CR = B T Q − CB −1 AQ
= (B T − CB −1 A)Q = E
となり、全ての式が成立する。
(証明終り)
補題 27 (3 次ブロック行列) [Einchhorn and Russell, 1976] G が 正 則 か つ 対 称 、
(
)−1 T
BT G−1 B が正則、C BT G−1 B
C が正則のとき行列
G B 0
D = BT 0 CT
0 C 0
に対して
D−1
G−1 − HT QH HT Q
QH
−Q
=
−L−1 KH
L−1 K
−HT KT L−1
KT L−1
L−1
(C.12)
である。ここで、
J
HT
K
≡ BT G−1 B
≡
G−1 B
≡
CJ−1
L ≡
CJ−1 CT
−1
Q ≡ J − KT L−1 K
(C.13)
である。
Brown[Brown, 1955] による。証明:
−1
G B
0
G − H T QH
−1
T
T
0 C
QH
DD = B
0 C
0
−L−1 KH
HT Q
−Q
L−1 K
−H T K T L−1
K T L−1
L−1
C.8 本分析に関連する行列の定理
295
に対して、(DD −1 )32 、(DD −1 )33 は G が対称であることから J も対称行列となること
を、利用すると、
(
(
(
(
DD−1
DD−1
DD
DD
)
11
)
)12
−1
)13
−1
21
(
)
= G G−1 − H T QH + BQH
(
)
= E − GH T QH + BQH = E + −GH T + B QH = E
= GH T Q − BQ = (GH T − B)Q = 0
= −GH T K T L−1 + BK T L−1 = (−GH T + B)K T L−1 = 0
(
)
= B T G−1 − H T QH − C T L−1 KH
= B T G−1 − B T H T QH − C T L−1 KH
= H − J(J −1 − K T L−1 K)H − C T L−1 KH
= H − JJ −1 H + JK T L−1 KH − C T L−1 KH
(
DD
= H − H + (JK T − C T )L−1 KH = 0
)
−1
22
= B T H T Q + C T L−1 K
= JQ + C T L−1 K
= J(J −1 − K T L−1 K) + C T L−1 K
(
(
(
DD
)
−1
DD
)
−1
DD
= E − JK T L−1 K + C T L−1 K = E(−JK T + C T )L−1 K = E
23
−1
)31
32
= −B T H T K T L−1 + C T L−1
= −JK T L−1 + C T L−1 = (−JK T + C T )L−1 = 0
(
)
= CQH = − DD−1 32 H = 0
= −CQ = −C(J −1 − K T L−1 K) = −CJ −1 + CK T L−1 K
= −CJ −1 + C(CJ −1 )T L−1 K = −CJ −1 + C(J T )−1 C T L−1 K
(
DD
−1
)
33
= −CJ −1 + CJ −1 C T L−1 K = −CJ −1 + K = 0
(
)
= CK T L−1 = C(J T )−1 C T L−1 = CJ −1 C T L−1 = E
逆に
G−1 − H T QH
−1
QH
D D=
−L−1 KH
HT Q
−Q
L−1 K
G
−H T K T L−1
K T L−1 B T
0
L−1
B
0
C
0
CT
0
296
付録 C 位置天文観観測データの解析と感度解析
に対しても
(
(
D−1 D
D−1 D
)
11
(
)
= G−1 − H T QH G + H T QB T
12
= G−1 G − H T QHG + H T QB T = E − H T Q(HG − B T ) = E
(
)
= G−1 − H T QH B − H T K T L−1 C
)
= G−1 B − H T QHB − H T K T L−1 C
= H T − H T QHB − H T K T L−1 C
= H T − H T (J −1 − K T L−1 K)HB − H T K T L−1 C
= H T − H T (J −1 − K T L−1 K)J − H T K T L−1 C
(
(
(
D−1 D
D−1 D
D−1 D
)
)13
)21
22
= H T − H T + H T K T L−1 KJ − H T K T L−1 C
= H T K T L−1 (KJ − C) = 0
(
)
= H T QC T = −H T D−1 D 23 = 0
= QHG − QB T = Q(HG − B T ) = 0
= QHB + K T L−1 C
= (J −1 − K T L−1 K)HB + K T L−1 C
= (J −1 − K T L−1 K)J + K T L−1 C
(
D−1 D
)
23
= E − K T L−1 (KJ − C) = E
= −QC T
= −(J −1 − K T L−1 K)C T
(
(
(
D−1 D
D−1 D
D−1 D
)
)31
)32
33
= −J −1 C T + K T L−1 KC T = −K T + K T L−1 L = 0
= −L−1 KHG + L−1 KB T = −L−1 K(HG − B T ) = 0
= −L−1 KHB + L−1 C = −L−1 (KHB − C) = −L−1 (KJ − C) = 0
= L−1 KC T = E
(証明終り)
系 28 [Einchhorn and Russell, 1976]
G
BT
0
の解
B 0
x
a
0 CT y = 0
z
b
C 0
y = QHa + KT L−1 b
である。ただし、Q, H, K, L は式 (C.13) で定義されたものである。
C.8 本分析に関連する行列の定理
297
補題 29 (4 次ブロック行列の場合) [Einchhorn and Russell, 1976] 4 次対称ブロッ
ク行列
G
PT
D≡
0
RT
は、
G
Γ = PT
0
P 0
0 ET
E 0
0 ST
0
ET ,
0
P
0
E
(
)−1
と置いて、G、PT G−1 P、E PT G−1 P
R
0
S
0
(C.14)
R
W = 0
S
ET 、WT Γ−1 W が正則の場合、逆行列
が求められる。
Γ−1
g11
T
= g12
T
g13
g12
g22
T
g23
g13
g23 ,
g33
d
Γ−1 W = f
e
(
)−1
χ ≡ WT Γ−1 W
,
と書くと、逆行列は以下の式になる。
D−1
g11 − dχdT
T
g12
− f χdT
=
T
g13
− eχdT
χdT
g12 − dχf T
g22 − f χf T
T
− eχf T
g23
χf T
g13 − dχeT
g23 − f χeT
g33 − eχeT
χeT
dχ
fχ
eχ
−χ
−1
証明: G の対称性より Γ 自身が対称行列となり、従って Γ
−1
に補題 27 を適用すると、補題の Γ
g11
g13
g23
J′
H ′T
K′
が対称行列となるから、Γ
の式のように書ける。ここで、
≡ G−1 − H ′T Q′ H ′
≡ −H ′T K ′T L′−1
≡
K ′T L′−1
≡
P T G−1 P
≡
G−1 P
≡
EJ ′−1
H ′T Q′
−Q′
L′−1
g12
g22
g33
≡
≡
≡
L′
Q′
≡
EJ ′−1 E T
′−1
≡ J
− K ′T L′−1 K ′
である。また、これらを用いて
g11 R + g13 S
d
T
f = g12
R + g23 S
T
e
g13 R + g33 S
である。
G
P T
D≡
0
RT
P
0
E
0
0
ET
0
ST
R
(
0
Γ
=
S
WT
0
W
0
)
となる。これに補題 24 を適用すると、補題の χ の定義を用いて
( −1
)
Γ − Γ−1 W χW T Γ−1 Γ−1 W χ
χW T Γ−1
−χ
T
g11 g12 g13
dχd
dχf T
T
T
g12
g22 g23 − f χd
f χf T
=
T
T
T
T
g13
g23 g(33
eχd
eχf
)
T
T
T
χd
χf
χe
D−1 =
dχeT
dχ
f χeT f χ
eχ
eχeT
−χ
298
付録 C 位置天文観観測データの解析と感度解析
となり、整理すると補題の結果となる。
(証明終り)
補題 30 (反転可能条件) G が対称かつ正則な行列
G
0
BT
0
0
CT
B
C
0
が正則であるための必要十分条件は、
(
−BT G−1 B
C
CT
0
)
が正則であることである。
証明: 行列
G
0
BT
0
0
CT
B
C
0
が正則であることの必要十分条件は、
G
0
BT
0
0
CT
B
p
C q = 0
r
0
が自明な解以外に解を持たないことである。これは、
Gp = −Br
Cr = 0
T
B p = −C T q
(C.15)
が (p = 0, q = 0, r = 0) 以外の解を持たないことと同値である。G の正則性を用いれば、
{
B T G−1 Br = C T q
Cr = 0
が (q = 0, r = 0) 以外の解を持たないことと同値であり、この時 p = −G−1 Br で与えら
れる。
(証明終り)
さらに条件を詰めるために、以下の考察を行う。行列が正則であるための必要条件は、
全ての列ベクトルが一次独立であることである。これと、行列 M の全ての列ベクトルが
C.8 本分析に関連する行列の定理
299
一次独立であれば MT M が正則である事実を用いると、各ブロックについて
G
G 0 B 0 = G2 + BB T
BT
(
) 0
0 0 C 0 = CC T
CT
( T
) B
B
C T 0 C = B T B + C T C
0
(
)
が正則である。これを式 (C.15) に適用すると、
(
)−1 T
r = − BT B + C T C
B Gp
(
)
T −1 T
B p
q = − CC
となる。これと p = −G−1 Br より、
q = 0 ←− p = 0 ←→ r = 0
従って、式 (C.15) の条件下で r = 0 が成り立つ条件を探せばよい。
なお、
G
0
BT
0
0
CT
B
p
x
C q = y
r
z
0
の解は、
(
−BT G−1 B
C
CT
0
)( ) (
)
r
z − BT G−1 x
=
,
q
y
p = −G−1 Br
で与えられる。
補題 9 の証明。
証明: 行列の正則性に関する必要十分条件は、全ての列ベクトルが一次独立であるこ
とである。条件 (1)(2) は、一次独立性の一部である。従って、必要条件となる。これに、
(3) を加えて必要十分となることを示せば良い。
問題となる線形空間を、ブロック行列の構造に合わせて、U, V, W の三つに分割する。
U はパラメータの線形空間、V は観測量の線形空間、W は拘束条件の線形空間に、それ
ぞれ対応する。B、C、G はそれぞれ以下の空間の間の線形作用素である。
C
B
G
W ←− U −→ V −→ V
また、転置行列は双対写像と考えられるので、
CT
BT
GT =G
W ∗ −→ U ∗ ←− V ∗ ←− V ∗
定理に与えられた全行列は、V ⊕ W ⊕ U から自身へ作用する線形写像である。観測 B に
よって得られるパラメータの間には縮退があるので、ベクトル空間 U の零ベクトルだけ
を要素に持つ線形部分空間を OU と書いて、一般に
V ⊃ ker(B) ̸= OV
300
付録 C 位置天文観観測データの解析と感度解析
である。また一般に線形空間 U, V に線形写像 A がある場合、j が U の線形部分空間
W ⊂ U への射影であって、A′ j = A なる A′ が存在する条件は、W ⊂ ker(A) である
(Nickerson et al.[Nickerson et al., 1965]、以下 NSS 定理 II-11.3)。
W⊂
U
j
y
U/W
A
−→ V
↗ A′
また、
U = ker(A)⊕U ′ と直和分解すれば、U ′ と im(A) は同型である (NSS[Nickerson et al., 1965]
定理 II-2.5) から、W = ker(A) ととれば A′ は単射となる (ker(A′ ) = OU /W である。
NSS[Nickerson et al., 1965] 定理 II-7.1 より)。
一方、転置行列が表す写像は双対空間での引き戻しの双対基底での表現である。
A
U
−→
V
↘ AT f yf
R
今、V = im(A) ⊕ V⊥ と直和分解すると、V⊥ の元のみで非 0 の値を持つ関数 f に対して
(AT f )(u) = 0, ∀u ∈ U である。即ち、ker(AT ) = V⊥ ∗ である。即ち、以下の図のような
関係となり、A や AT の定義域と値域を適切に制限すれば、全単射 A′ や A′ を誘導する。
T
U=
ker(A)
⊕
∗
U∗ =
U⊥
⊕
A′
U/ker(A)
im(AT )
−→
im(A)
′T
A
←− V ∗ /ker(AT )
⊕
V⊥
⊕ ker(AT )
=V
= V∗
以上を前提に、問題の線形写像の性質を調べる。
W
j
−→ W ⊃ xim(C)
′
C
U/ker(C)
C
←− U
↙j
B
−→ im(B)
x⊂V
j
↘
B ′
U/ker(B)
j
←− V
線形空間 W へ map する写像は C だけだから、逆写像が存在するためには C が全射
imC = W でなければならない。C ′ は単射、im(C) = imC ′ だから C ′ も全射で、C ′
−1
が存在する。また、B ′ : U/ker(B) −→ im(B) は全単射であり、逆写像が存在する。従っ
て、U = ker(B) ⊕ ker(C) なら
B(b ∈ ker(C)) + C(c ∈ ker(B)) : U −→ im(B) ⊕ W
は全単射である。双対空間に適切な同型関係が誘導されているとして、U ⊕ V ⊕ W から
自身へ以下のような全単射の関係が存在する。
U
yC ↘ B
W
im(B)
V⊥
⊕ V⊥
⊕
im(B)
W
T
T
,
yB
yC
U/ker(B) ⊕ ker(B) = U
V = im(B) ⊕ V
従って、V⊥ から自身への全単射があれば、全体の全単射が定義される。これを G が担当
することが、条件となる。
(証明終り)
C.9 本分析に関連する統計学の基礎事項
301
系 10 の証明。
証明: 補題 9 より、
C=
として D ≡
( )
B
C
∂H ∂a 0
の各列が一次独立でなければならない。これは、ker(D) = O である
ことを意味する。線形写像 B および C の定義域である adjustment parameter の線形空
間を U と書けば、全ての D の行ベクトルと一次独立な、非自明の u ∈ U は存在しない。
一方、全ての B の行ベクトルと一次独立な非自明の u ∈ U は n 個存在するので、この n
個を C の行ベクトルとして採用すれば、D に対する要求が満たされる。
(証明終り)
補題 11 の証明。
説明: 定理 9 より a = b + c, b ∈ B, c ∈ C が A の全体を張れば、問題は well defined
である。しかし、定理 9 を満たすような C の選び方は、一意ではない。この定理は、幾
何学的には以下のように説明可能である。
B は、パラメータの全空間 A 内の超平面である。観測は、空間 B 内での確率分布を与
えるが、これに直交する空間に対して確率的制約を与えない。従って、確率分布一定の曲
面は、B に垂直な、円柱状の形状になる。
一方、拘束条件は c ∈ C を与える。これを空間 C ′ と書くと、B と同じ次元の A 内の超
平面である。この拘束条件のもとで、確率一定の場所は、C ′ と先に求めた B に垂直な円
柱の交わった領域、C ′ 内の楕円である。この楕円が最も小さくなるような C の選び方が、
パラメータを最も良く決める C の選び方になる。これは、C ′ が B の平行移動であること、
即ち C と B が直交することである。
(証明終り)
C.9 本分析に関連する統計学の基礎事項
定理 31 (最尤度法) 独立の観測値 xi が観測される確率が、パラメータ a を持つ確
率密度関数 fi (xi ; a) で与えられる系を考える。観測値 xi が与えられた場合、
L (a) =
∏
fi (xi ; a)
i
の最大値を与える a が最も起こりやすいパラメータ値である。
証明: 観測が独立なので、同時確率密度関数は fi (xi ; a) の積
P (x; a) =
∏
fi (xi ; a)
i
で与えられる。この確率密度関数は、a が与えられたときの x の条件付確率と見ることが
出来るが、これは逆に x が与えられたときの a の条件付確率でもある。これを、a の確
率密度関数 L(a) とすれば、上の定理となる。この L は尤度関数と呼ばれるが、実際には
302
付録 C 位置天文観観測データの解析と感度解析
この対数をとった対数尤度関数を使うと便利な場合が多い。
(証明終り)
定理 32 (パラメータの共分散行列)
Vnm =
])−1
( [
∂ 2 ln L E −
∂an ∂am â
証明:
(証明終り)
(
)T
定理 33 (線形モデル) パラメータ a = a1 , a2 , . . . , am
(
)
(
)T
aij , x = x1 , x2 , . . . , xn
について、x = Aa, A =
, (n ≥ m) の観測を行うことを考える。ただし、観測
誤差は多次元 Gauss 分布に従うものと氏、共分散行列を σ とする。このとき、パラ
(
)−1
メータの共分散行列は AT σ −1 A
で与えられる。
証明: 定理 32 より、
])−1
( [
∂ 2 ln L E −
∂an ∂am â
1
T
− ln L + const = (x − Aa) σ −1 (x − Aa)
2
)
)
(
(
∑
∑
1∑
−1
Aik ak σij xj −
Ajl al
xi −
=
2 ij
k
l
∑
∂ 2 ln L −1
−
=
Ain σij
Ajm
∂an ∂am â
ij
Vnm =
より。
(証明終り)
C.10 本分析に関連する線形推定問題に関する定理
C.10.1 線形推定問題の定式化
定理 8 の証明。
証明: この問題に関しては、[Eichhorn and Clary, 1974] の第 1 章 “The principles of
least squares adjustments” に従って解説。等式制約条件
F (x0 + v, a0 + ∆) = 0
(C.16)
は、定理 8 仮定 1 より {v}、{∆} は十分小さいとして Taylor 展開すれば、式 (C.16) は
F 0 + Xv + A∆ + L + . . . = 0
(C.17)
C.10 本分析に関連する線形推定問題に関する定理
303
となる。L は (v T , ∆T ) の各成分の二次形式 (quadratic form)*7 。
さらに定理 8 仮定 2 が成立すれば、
F 0 + Xv + A∆ = 0
(C.18)
が得られる。
補題 34 に従って、v, ∆ とも変数とする
S(v, ∆) = v T σ −1 v − 2ΛT (Xv + A∆ + F 0 )
の最小化問題と同値である。
∂S
= v T σ −1 − ΛT X
∂v
v = σXT Λ
0=
(C.19)
を式 (C.18) に代入すれば (C.3) が、また
0=
∂S
= −2ΛT A
∂∆
より (C.4) のの二つの正規方程式 (normal equation)
*8 を得る。
(証明終り)
補題 34 (Brown) [Brown, 1955] 等式制約条件
F (x, a) = F 0 + Xv + A∆ = 0
のもとでの v T σ −1 v の最小化問題は、最小化問題は、Lagrange 未定乗数 (Lagrangian
multipliers) Λ を導入し、
S(v, ∆) = v T σ −1 v − 2ΛT F (x, a)
に対して、S の v 及び ∆ に対する最小化問題となる。
証明: Brown[Brown, 1955] に従って、Lagrange 未定乗数 −2Λ を導入する。もともとの
最小化問題は、v だけでなく制約条件の中に含まれるパラメータ残差 ∆ を含む最小化問
題である。これが、未定乗数の導入により v, ∆, Λ の最小化問題となる。ただし、Λ に対
する最小化の部分は制約条件そのものである。
(証明終り)
C.10.2 非特異制約条件の場合
定理 12 の証明。
証明: 最小化問題 7 が定理の式に与えられる線形問題に帰着することは、定理 8 により
示されている。従って、解 ∆ はこの行列を反転することにより得られる。
*7
*8
原文は (v T ∆T )(v T ∆T ) の成分の二次形式。
最小二乗問題において、最小化関数 S(θ) に対して ∂S(θ)/∂θj = 0 を言う。
304
付録 C 位置天文観観測データの解析と感度解析
共分散行列を求めるには、まず定理の式の係数行列の逆行列の性質について調べる。表
記の簡単のため、G ≡ XσXT と記す。共分散行列が対称であることおよび G の定義式
より、G も対称行列となる。逆行列を
(
G
AT
A
0
)−1
(
=
P QT
Q R
)
と書けば、逆行列自信も対称行列なので、P および R は対称行列である。この行列が逆
行列である条件から、
GP + AQ = E,
QA = E
QG + RAT = 0,
PA = 0
これらの関係を利用すると、
−
Q = A
P− = G
R = −QGQT
の関係が得られる。ただし、A− は一般化逆行列で、AA− A = A を満たす行列である。
次に、共分散行列 Σ を導出する。ある (x0 , a0 ) を与えたときに、パラメータの近似値
a0 に対する修正 ∆ と Lagrange 未定乗数 Λ を求める式は、定理の式を逆に解けば良い。
いま観測値 x は確率変数で、一つの観測値は確率変数のひとつの realization である。そ
こで、そのアンサンブルを xi と書くことにし、F (xi , a0 ) = F i と書く。一つの観測値と
パラメータ近似値を与えると、Lagrange 未定乗数とパラメータの修正を計算することが
出来ることが式の意味であった。x の変化が十分小さく、線形化可能条件を満たす範囲内
であれば、観測値としてどういう値を選ぶかは関係なく同じ式が成立する。そこで、観測
値 xi に対する未定乗数とパラメータの修正をそれぞれ Λi , ∆i と書く。いま、xi は狭い
範囲で動いているものとしているので、パラメータ近似値 a0 は固定してよい。即ち、
(
Λi
∆i
)
(
=
P QT
Q R
)(
Fi
0
)
(
=
PF i
QF i
)
となる。
⟨
⟩ ⟨ ⟩⟨
⟩
(⟨
⟩ ⟨ ⟩ ⟨ ⟩)
Σ ≡ ∆∆T − ∆ ∆T = Q F i F Ti − F i F Ti
QT
となる。ここで、xi → x0 + δxi に変化したときの変化は線形化可能条件より
F i = F 0 + Xδxi
である。これを代入すれば、
(⟨
⟩ ⟨ ⟩ ⟨ ⟩)
(⟨
⟩
⟨ ⟩)
F i F Ti − F i F Ti
= X xi xTi − ⟨xi ⟩ xTi XT = XσXT = G
と表すことができる。まとめると、
Σ = QGQT = −R
であり、定理の式が示された。
(証明終り)
C.10 本分析に関連する線形推定問題に関する定理
305
T
系 35 [Einchhorn and Russell, 1976] 定理 12 の等式制約条件 F について、XσX
(
及び AT XσXT
)−1
A が non singular であれば、
(
(
)−1 )−1 T (
)−1
∆ = − AT XσXT
A
A XσXT
F0
(
(
)−1 )−1
Σ = AT XσXT
A
(C.20)
(C.21)
証明: この線形問題を表す定理の条件の元で逆行列を持つことは、行列に関する系
24 及び系 25 を適用することで確かめられる [Brown, 1955, Eichhorn and Clary, 1974,
Einchhorn and Russell, 1976]。共分散行列については、定理 12 及び系 24 より。
(証明終り)
2
系 36 [Einchhorn and Russell, 1976] 補題 35 において、更に X = I、σ = σ I の
場合、
(
)−1 T
∆ = − AT A
A F0
( T )−1
2
Σ=σ A A
証明: 代入する
(証明終り)
306
付録 C 位置天文観観測データの解析と感度解析
C.10.3 制約条件の分離
補題 37 (制約条件が分離可能な場合) [Einchhorn and Russell, 1976] 等式制約条件
fi ({x}i , {a}i = 0 のいくつかの i で {x}i = ∅ の場合には、一般性を失うこと無く等
式制約条件が
G(x, a) = 0
H(a) = 0
(C.22)
(C.23)
に分離できる。このとき、以下の G ≡ YσY T 及び J ≡ BT (YσY T )−1 B が非特異
なら式 (C.5) は
YσYT
BT
0
B
0
C
0
M
G0
0
C T ∆ + 0 = 0
N
H0
0
0
(C.24)
の形となり、解くことが出来る。ここで、M , N はそれぞれ G = 0 および H = 0
に相当する Lagrange 未定乗数である。解と共分散行列は
∆ = −QHG0 − KT L−1 H 0
(C.25)
Σ=Q
(C.26)
となる。ここで、
( )
Y
X=
,
0
および
G
HT
K
(
Y=
∂G
∂x
)
(
,
B=
0
∂G
∂a
)
(
,
C=
0
∂H
∂a
J ≡
BT G−1 B
L ≡
CJ−1 CT
−1
Q ≡ J − KT L−1 K
≡ YσYT
≡ G−1 B
≡ CJ−1
)
0
(C.27)
である。
証明: この場合、補題 38 により、系 35 の式 (C.20) を直接用いることは出来ない。
一般性を失うこと無く、{x}i = ∅ となるのは等式制約条件の最後の n 個であるとでき
る。この時、等式制約条件 (C.2) は定理の (C.22)(C.23) に分離される。そうした場合、
定理 8 の記号との関係は次のようになる。∆ はそのまま、
(
F =
)
G
,
H
Λ=
( )
M
,
N
X=
( )
Y
,
0
A=
( )
B
C
定理に示された記号を用いて、式 (C.5) は
YσYT
0
BT
0
0
CT
B
M
G0
0
C N + H 0 = 0
∆
0
0
0
(C.28)
となる。行と列を適切に入れ替えると、式 (C.24) の形となる。式 (C.24) の行列は、補題
27 の行列と同じとなる。解は系 28 より求められる。共分散行列 [Brown, 1955]*9 は、定
*9
原文では −Q となっているが、Q のはずである。
C.10 本分析に関連する線形推定問題に関する定理
307
理 12 から式 (C.28) の逆行列の (33) 成分に現れることになる。式 (C.28) と式 (C.24) の
形を見比べれば、式 (C.24) の逆行列の (22) 成分に共分散行列があらわれることとなる。
これを、補題 27 の逆行列と比較すれば、示される。共分散行列は、補題 27 と定理 12 よ
り求められる。
(証明終り)
補題 37 は、
• 式 (C.25) は、∆, M , N が G0 , H 0 の線形結合で書けることを示している。
• G = 0, H = 0 であり、x0 ∼ x, a0 ∼ a であるから、G0 , H 0 は小さい。
• これらは v を含まない。
系 35 が使えるのは、XσXT が非特異な場合に限られる。しかし、実際に良く現れ
る例で、補題 38 のような場合には、この補題は使えない。そこで、そのような場合
への拡張を考えたのが、この章の補題 37 である。ただし、もともとある種の縮退が
(
あるために AT XσXT
)−1
A が非特異で、この特異性を回避するためにもとの制約条
件 F をこの章の G としてそのまま用い、条件 H を追加した場合は、補題 37 は使え
ない。なぜならば、この場合補題 37 の仮定、J の非特異性は成り立たないからであ
る。この場合は、補題 40 を使うことになる。[Brown, 1955, Eichhorn and Clary, 1974,
Einchhorn and Russell, 1976]
補題 38 (制約条件が x を含まない場合) [Einchhorn and Russell, 1976] 等 式 制 約
条件 fi ({x}i , {a}i ) = 0 のいくつかの i で {x}i = ∅ の場合には、式 (C.5) の XσXT
が singular になる。
証明: Brown[Brown, 1955] で示されている。
(
XσXT =
YσYT
0
0
0
)
となる。
(証明終り)
系 39 (制約条件 H を含まない場合) [Einchhorn and Russell, 1976] 補 題 37 で 制
約条件 (C.23) を含まない場合、定理の結論は Y = X および B = A とした場
合の系 35 の結論、式 (C.20) に帰着する。
証明: 等式制約条件 (C.23) を含まない場合、C の階数は 0 となる。この場合、L, K も階
数 0 である。
(証明終り)
308
付録 C 位置天文観観測データの解析と感度解析
C.10.4 パラメータの分離
補題 40 (adjustment parameter の分離) [Einchhorn and Russell, 1976] 等 式
制約条件が
G(x, a) = 0
H(a) = 0
の形で書かれ、adjustment parameter が aT =
(
bT , cT
)
のように分離され、その
T
残差が ∆ = (Φ, Ψ)T のように分離される場合を考える。Ψ が既知の場合、YσY T
T
T −1
が非特異かつ
P が非特異であれば、系は解くことが出来る。ただし、
(
) P (YσY ) (
)
∂G
∂x
Y=
、および P =
0
∂G
∂b
である。
0
証明:
(
P=
∂G
∂b
)
(
,
E=
0
∂H
∂b
)
(
,
R=
0
∂G
∂c
)
(
,
S=
0
∂H
∂c
)
(C.29)
0
と定義すると、M , N はそれぞれ G = 0 および H = 0 に相当する Lagrange 未定乗数
として
YσYT
PT
0
RT
P 0
0 ET
E 0
0 ST
R
M
G0
0
Φ 0 0
0
+
=
S N H 0 0
Ψ
0
0
0
(C.30)
となる。
定理 8 の記号との関係は以下の通りである。
(
)
G
F =
,
H
(
)
P R
A=
E S
( )
b
a=
,
c
( )
Φ
∆=
,
Ψ
(
Λ=
M
N
)
,
( )
Y
X=
,
0
Ψは既知だから、(M , N , Φ) に関する式は式 (C.30) のサブシステムで、補題 37 のの
式 (C.24) で B → P、C → E に置き換えたものに相当する。PT G−1 P は非特異だから、
これが ∆ を Φ と Ψ に分離した理由である。系は解ける。共分散行列は、補題 29 と定理
12 より求められる。
(証明終り)
(
)−1
B が特異であることは、問題の解が一意でないことを示すわけで
J ≡ BT YσYT
はない。行列の階数が次数より小さいことを示しているだけで、補題 37 中の行列そのも
のは非特異である。即ち、(C.23) が課せられていない場合は、∆ の subsetΦ(一意に決ま
る) を求める前に、残りの ∆ の subset である Ψ(一意には決まらない) が既知であること
を要求している。
もし、c のどの成分も H = 0 に含まれなければ、S = 0 となる。可能であれば、その
ように Ψ を選ぶ。
C.11 行列反転の逐次更新に関する定理
309
補題 41 (adjustment parameter の分離) [Einchhorn and Russell, 1976]
T
T
ad-
T
justment parameter の残差が ∆ = (Φ, Ψ) のように分離され、YσY が非特異
かつ PT (YσY T )−1 P が非特異かつ WT ΓW が非特異な場合、
(
)
ΩT ≡ M T ΦT N T
[
]
(
)−1 T −1
Ω = Γ−1 W WT Γ−1 W
W Γ − Γ−1 F̄ 0
(
)−1 T −1
Ψ = − WT ΓW
W Γ F̄ 0
(C.31)
(C.32)
となる。ただし、
P 0
0 ET ,
E 0
YσYT
PT
Γ=
0
R
W = 0,
S
G0
F̄ 0 = 0
H0
証明: 式 (C.30) を
(
Γ
WT
W
0
)( ) ( ) ( )
Ω
F̄ 0
0
+
=
Ψ
0
0
(C.33)
と書き直す。ここで、ΩT = (M T ΦT N T ) であり、この置き換えで Γ と W も定まる。
(C.33) から
Ω = −Γ−1 (WΨ + F̄ 0 )
(C.34)
となる。Γ−1 は、式 (C.12) と同様に導くことが出来る。
(証明終り)
定理 42 (共分散行列) [Einchhorn and Russell, 1976] ∆ の共分散行列 Σ は
(
g − f χf T
Σ = − 22 T
χf
fχ
χ
)
(C.35)
である。ここで、
Γ−1
g11
T
= g12
T
g13
g12
g22
T
g23
g13
g23 ,
g33
WT Γ−1 W = χ−1 ,
T
f = g12
R + g23 S
証明: 補題 41 および定理 12 より。
(証明終り)
C.11 行列反転の逐次更新に関する定理
C.11.1 フィルタリング
補題 13 の証明。
証明: パラメータセットを a、観測量の系列を xn とする。観測量の {x1 , · · · , xn } に基
づく a の推定値を an とする。行列 A、X、σ 、ベクトル F 0 も、全て添え字 n をつけた
310
付録 C 位置天文観観測データの解析と感度解析
表記を行う。今、系列 {x1 , · · · , xn−1 } が与えられたとき、系 35 より
)−1
(
)−1
(
)−1
(
An−1
ATn−1 Xn−1 σn−1 XTn−1
F n−1,0
∆n−1 = − ATn−1 Xn−1 σn−1 XTn−1
(
)
−1
(
)−1
Σn−1 = ATn−1 Xn−1 σn−1 XTn−1
An−1
となる。これらが既知であるという条件のものとで、新たに観測が追加された場合に、
(
)−1
(
)−1
(
)−1
∆n = − ATn Xn σn XTn
An
ATn Xn σn XTn
F n,0
(
)
−1
(
)−1
Σn = ATn Xn σn XTn
An
を簡便に求めることが、filterling の考え方となる。
観測が追加されたということは、F と x の要素数、A の行数、X 及び σ の次数が増え
たことを意味する。それぞれの関係は、新たに追加される要素を添え字無しで書くとすれ
ば、形式的に以下のように書き下すことが出来る。
(
)
xn−1
xn =
,
x
(
)
An−1
An =
,
A
an = an−1 + ∆n−1 ,
(
)
Xn−1 0
Xn =
,
0
X
( )
0
Fn =
,
F
(
σn−1
σn =
0
0
σ
)
ここで、
A=
∂F
,
∂a
X=
∂F
,
∂x
at a = an , x = (xn−1 , x),
F n−1 (an , xn−1 ) = 0
である。
これを順次計算する。
(
)
T
T −1
Σ−1
An
n = An Xn σn Xn
((
)(
)( T
))−1 (
)
)
( T
0
Xn−1 0
σn−1 0
Xn−1
An−1
T
= An−1 A
0
X
0
σ
A
0
XT
(
)
(
)
−1
(
) Xn−1 σn−1 XTn−1
0
An−1
= ATn−1 AT
A
0
XσXT
)(
((
)−1
)
T
) Xn−1 σn−1 Xn−1
( T
0
An−1
T
(
)−1
= An−1 A
A
0
XσXT
(
(
)−1
)−1
= ATn−1 Xn−1 σn−1 XTn−1
A
An−1 + AT XσXT
(
)
−1
T
T −1
A
= Σn−1 + A XσX
となる。これに inversion lemma を適用すれば、
)−1
(
(
)
T
T −1
A
Σn = Σ−1
+
A
XσX
n−1
((
)
)−1
AΣn−1
= Σn−1 − Σn−1 AT XσXT + AΣn−1 AT
となる。これから、
(
)
∆n = −Σn ATn Xn σn XTn F n,0
(
)
= −Σn AT XσXT F
C.11 行列反転の逐次更新に関する定理
311
(
補題 13 で示した証明方法は、Σn = An Xn σn XT
n
)−1
An の正則性を仮定している。位
置天文学に現れるより一般な場合には拡張できない。そこで、Eichhorn[Einchhorn, 1993]
による証明方法を紹介する。
別の証明: original parameter estimate ân−1 と共分散行列 Σn−1 が available data
で、条件式は available でないかもしれない。さらに、新しい等式制約条件
F (x, a) = 0
は、前段階のものと同じか同じでないかは別として、知られているとする。ここで、a が
得たいパラメータ、x は観測可能量で、x0 は直接観測により得られるとする。
この場合、an−1 を、共分散行列 Σn−1 の観測と見なすことが出来る。そうすると、
an−1 − a = 0
という新たな等式制約条件を加えて、
Σn−1
0
−I
0
XσXT
AT
−I
0
Λ0
A Λ1 = − F0
0
∆
0
という行列による推定問題となる。これは、
(
)
I 0
,
0 X
( )
0
=
,
F0
Xn =
F 0,n
σn =
(
Σn−1
0
a0,n = an−1 ,
)
0
,
σ
x0,n
( )
−I
An =
,
A
(
)
an−1
=
x0
と置き換えた場合の、定理 8 の推定問題と同じである。
行と列を置き換えて、
XσXT
0
AT
0
Σn−1
−I
A
Λ1
F0
−I Λ0 = − 0
∆
0
0
となる。これに、関係式
(
Σn−1
−I
)−1 (
)
−I
0
−I
=
0
−I −Σn−1
312
付録 C 位置天文観観測データの解析と感度解析
に注意し、かつ Inversion lemma(補題 21) を適宜用いて補題 22 を適用すると、
−1
XσXT
0
A
0
Σn−1 −I
AT
−I
0
(
)
P Q
=
QT R
((
) ( )
)
) (
) −1
0 (
Σn−1 −I
T −1
0
A
XσX
R=
−
−I
0
AT
(
) (
)( )
0
0
−I
0
−I
=
+
−I −Σn−1
−I −Σn−1
AT
(
)(
))−1
(
)
(
) (
) 0
(
) 0
(
0
−I
−I
T
0 A
XσX − 0 A
−I −Σn−1
−I −Σn−1
AT
(
) (
)
T
((
)
)
)
−1 (
0
−I
−A
−A −AΣn−1
=
+
XσXT + AΣn−1 AT
T
−I −Σn−1
−Σn−1 A
(
)
T
A SA
−I + AT SAΣn−1
=
−I + Σn−1 AT SA −Σn−1 + Σn−1 AT SAΣn−1
((
)
)−1
S ≡ XσXT + AΣn−1 AT
( )
)
0
−1
−1 (
−1
0 A R
P = (XσX) + (XσX)
(XσX)
A
(
)
−1
−1
−1
= (XσX) + (XσX) A −Σn−1 + Σn−1 AT SAΣn−1 AT (XσX)
(
)
−1
0 A R
Q = − (XσX)
(
(
)
(
))
−1
= (XσX) A I − Σn−1 AT SA (XσX)−1 A Σn−1 − Σn−1 AT SAΣn−1
従って、
(
)−1
Σn = Σn−1 − Σn−1 AT XσXT + AΣn−1 AT
AΣn−1
となる。
また、
∆ = −QT12 F 0
[
]
(
)−1
(
)−1
= − Σn−1 − Σn−1 AT XσXT + AΣn−1 AT
AΣn−1 AT XσXT
F0
となる。
この式では、新たな観測量のサイズの行列の反転しか必要としない。これは、Kalman
filtering の基本アイディアである。また、前の観測の共分散行列の正則性も不要で、観測
を追加する毎に順次適用することが出来る。
(証明終り)
C.11 行列反転の逐次更新に関する定理
313
補題 43 (Filtering) [Einchhorn, 1993] 観測によりパラメータが追加される場合
∂F
、X、σ および A も新たな観測に対応する
∂b
もの、新たな観測が加わる前の共分散行列を Σn−1 として、
(新たな制約条件を F (x; a, b))、B ≡
Σn
(
=
(
(
)−1 T )
Σn−1 − Σn−1 AT S − SB BT SB
B S AΣn−1
( T
)−1 T
− B SB
B SAΣn−1
(
)−1
S ≡ XσXT + AΣn−1 AT
(
)−1 )
−Σn−1 AT SB BT SB
( T
)−1
B SB
(
(
(
)−1 T ))
( )
Σn−1 AT S − SB BT SB
B S
∆a
=−
F0
(
)
−1
∆b
BT SB
BT S
となる。
証明: パラメータが追加される場合。
F (x; a, b) = 0
対応関係は、
(
)
I 0
,
0 X
)
−I 0
An =
,
A B
)
( )
0
a0
,
a0,n =
,
σ
b0
Xn =
(
Σn−1
σn =
0
(
(
となる。ここで、
B=
∂F
∂b
(
)
0
F 0,n =
F0
( )
â
,
x0,n =
x0
)
である。反転すべき行列は
Σn−1
0
−I
0
0
Λ0
0
Λ1
F0
B
= −
0
0 ∆a
∆b
0
0
0
XσXT
AT
BT
−I
A
0
0
−I
0
0
A
0
Λ0
0
∆a
0
AT
= −
0
BT ∆b
T
Λ1
F0
XσX
行と列を入れ替えて、
Σn−1
−I
0
0
0
0
0
B
( )
α
αn =
β
314
付録 C 位置天文観観測データの解析と感度解析
となる。従って、
(
P
QT
−1
Σn−1 −I 0
0
−I
Q
0 0
AT
≡
0
0 0
BT
R
0
A B XσXT
)(
((
) (
)(
))−1
0
BT
0 0
0
−I
0 0
R=
−
0 A
−I −Σn−1
B XσXT
0 AT
)−1
(
0
BT
=
B XσXT + AΣn−1 AT
)
(Inversion of Block Matrix)
( (
)
)−1
( T
)−1 T
− BT SB
B SB
B S
(
)−1
(
)−1 T
=
SB BT SB
S − SB BT SB
B S
(
)
T
T −1
S ≡ XσX + AΣn−1 A
(
)
) (
)(
0
−I
0
−I
0 0
P=
+
−I −Σn−1
−I −Σn−1
0 AT
)(
( (
)−1
( T
)−1 T
)(
)
− BT SB
B SB
B S
0 0
0
−I
(
)−1
(
)−1 T
0 A
−I −Σn−1
SB BT SB
S − SB BT SB
B S
(
)
T
TΣn−1 − I
=
Σn−1 T − I Σn−1 TΣn−1 − I
(
(
)−1 T )
T = AT S − SB BT SB
B S A
)
)−1
( T
)−1 T
(
)(
)( ( T
0 0
− B SB
B SB
B S
0
−I
(
)−1
(
)−1 T
Q=−
−I −Σn−1
0 AT
SB BT SB
S + SB BT SB
B S
(
)
(
)
(
)
−1
−1 T
AT SB BT SB
AT S − SB BT SB
B S
(
)
=
(
)
(
)
−1
−1
Σn−1 AT SB BT SB
Σn−1 AT S − SB BT SB
BT S
(
)
P22 Q21
Σn = −
QT21 R11
(
(
(
)−1 T )
Σn−1 − Σn−1 AT S − SB BT SB
B S AΣn−1
=
( T
)−1 T
− B SB
B SAΣn−1
(
)−1 )
−Σn−1 AT SB BT SB
( T
)−1
B SB
( )
(
)
∆a
Q22 F 0
=−
∆b
R12 F 0
(
(
(
)−1 T ))
B S
Σn−1 AT S − SB BT SB
F0
=−
( T
)−1 T
B SB
B S
(証明終り)
系 14 の証明。証明: 観測が一件追加され、これにともなってパラメータが一つ追加され
る場合を考える。この場合、補題 43 で A が一行、B、X、および σ が一行一列の場合に
相当する。そこで、
A = αT ,
( )
B= β ,
( )
X= 1 ,
( )
σ = σ2
C.11 行列反転の逐次更新に関する定理
315
とおいて、
(
)−1
S = XσXT + AΣn−1 AT
−1
∑
= σ 2 +
αi αj (Σn−1 )ij ≡ s
ij
また、B も一行一列であるから、
(
BT SB
)−1
=
1
β2s
(
)−1 T
SB BT SB
B S=s
(
となる。従って、
Σn =
−Σn−1 α/β
1/β 2 s
Σn−1
−αT Σn−1 /β
)
(証明終り)
C.11.2 直接反転による漸化式
拘束条件 C が存在して問題が well defined である時、
P
QT
RT
と置けば、
G
0
BT
が
P
QT
RT
Q
S
TT
R
G
T ≡ 0
BT
U
0
0
CT
B
Λ0
G0
C Λ1 + H 0 = 0
∆
0
0
Q
S
TT
R
G0
Λ0
T H 0 + Λ1 = 0
∆
0
U
0
0
CT
−1
B
C
0
と同値である。今、
U = −Σn
であるから、これは既知量である。これに、T を知る方法があれば、全行列が以下の定理
で簡単に求められる。補題 15 の証明。
証明逆行列である条件を書き下すと、以下の関係式が得られる。
P G + RB T = E
T
(C.36)
RC = 0
P B + QC = 0
(C.37)
(C.38)
QT G + T B T = 0
(C.39)
T
TC = E
(C.40)
Q B + SC = 0
(C.41)
T
T
(C.42)
T
(C.43)
T
R G + UB = 0
UC = 0
T
T
R B+T C =E
(C.44)
316
付録 C 位置天文観観測データの解析と感度解析
まず、式 (C.42) より、G の正則性及び U が対称であることを用いて
R = −G−1 BU
となる。この式と式 (C.43) から式 (C.37) が導かれる。
次に、R が得られていれば P と M atT は G, B, C を使って書き下すことが出来る。式
(C.36) より
(
)
(
)
P = E − RB T G−1 = E + G−1 BU B T G−1
が得られる。式の形と U 及び G の対称性より、P の対称性は明らかである。また補題 9
より CCT が正則である。式 (C.44) の転置を取り左から C を掛ければ、T の係数 CCT
は反転可能で
(
)−1 (
)
T = CC T
C E − BT R
が得られる。この式と式 (C.43) から式 (C.40) が導かれる。
さらに、Q と S は T, G, B を使って書き下すことが出来る。式 (C.39) より
QT G + T B T = 0
GQ = −BT T
Q = −G−1 BT T
が得られる。式 (C.41) と式 (C.40) から
QT B + SC = 0
QT BT + SCT = QT BT + S = 0
S = −QT BT
となる。なお、式 (C.43) と R の式より式 (C.37) が、式 (C.44) と P、Q、R の式より式
(C.38) が求められる。
(証明終り)
補題 16 の証明。
証明
G
0 B
Λ0
F0
0
0
0 C Λ1 + G0 = 0
BT C T 0
∆
0
0
−1
G
0 B
Λ0
F0
Λ1 = − 0
0 C G0
∆
0
BT C T 0
P
Q R
F0
= − QT S T G0
0
RT T T U
∆ = RT F0 + T T G0
= ΣB T G−1 F0 + (E − ΣB T G−1 B)C T (CC T )−1 G0
(証明終り)
C.11 行列反転の逐次更新に関する定理
(
∆Ta
∆Tb
)
317
(
を導出する式は順次計算されているので、 RT
TT
)
を知る方法がある
かもしれない。
少なくとも、補題 9 より C の各行は一次独立である。このことより、C のランクは行
数 (行数は列数より小さい) であり、従って行数の数だけの一次独立な CT の行ベクトル
をとることが出来る。これらの行ベクトルだけから構成された正方行列は正則である。す
なわち、CT T = E + BT G−1 BU から適当な行だけを取り出した式から、T = の形に解
くことが出来ることは、保証されている。
補題 44 (拘束条件の変更 (一般論))
G
0
AT
0
0
CT
−1
P
A
C = QT
0
RT
Q
S
TT
R
T
U
が既知の場合を考える。C′ − C = D とすると、
−1
−1
G
0
A
G
0 A
0
0
C′ = 0
0 C
T
T
′T
A
CT 0
0
A
C
)−1 ( T T
QD R ( T
D SD I + DT T
D Q
− SD T
I + TT D
U
RT
T
T D U
)
DT S D T T
TT
U
である。
証明: 一般に、行列の各列及び行を n = a + b + c 次元空間に分割すると、
(n×2c)
(
0 0
0
A 0
I (c×c)
0 I
I
(c×c)
0
)(
T
0 A
0 0
0
I
)
0(a×a)
= 0
0
0
0
(AT )(c×b)
0
A(b×c)
0
318
付録 C 位置天文観観測データの解析と感度解析
が成り立つ。
−1
G
0
A
0
0
C ′
T
′T
A
C
0
−1
G
0 A
0 0
0
0 C + 0 0 D
= 0
AT C T 0
0 DT 0
) −1
)−1 (
0 0 (
G
0 A
T
0
I
0
D
0
0 C + D 0
= 0
I 0
0 0 I
T
T
0 I
A
C
0
P
Q R
P
Q R
0 0
= QT S T − QT S T D 0
0 I
RT T T U
RT T T U
−1
(
) (
) P
Q R
0 0
T
0 T
0 I + 0 D
Q
S T D 0
I 0
0 0 I
0 I
RT T T U
(
) P
Q R
0 DT 0 T
Q
S T
0 0 I
RT T T U
)−1 ( T T
P
Q R
QD R ( T
D SD I + DT T
D Q
= QT S T − SD T
I + TTD
U
RT
T
T
T
T D U
R
T
U
DT S
TT
DT T
U
)
(証明終り)
補題 45 (拘束条件の変更、変更箇所が限定された場合)
G
0
AT
0
0
CT
A
C
0
−1
K
·
=
·
·
が既知の場合を考える。ここで、Aa×(c+d) 、C =
L M
P Q
· S
·
·
(
0(b×c)
N
R
T
U
)
D(b×d) であり、右辺
の行列は行と列を a + b + c + d 次元に分割して表示しているものとする。
−1
−1
A
G
0 A
C′ = 0
0 C
T
A
CT 0
0
LD N (
) (
PD R DT PD I + DT R −1 DT LT
− T
Q D T I + RT D
U
NT
T
R D U
G
0
AT
0
0
T
C′
である。ここで、
(
DT PD I + DT R
I + RT D
U
は b + d 次の正方行列である。
DT P
RT
DT Q
TT
DT R
U
)
)
C.11 行列反転の逐次更新に関する定理
319
証明: 一般に、行列の各列及び行を n = a + b + c + d 次元空間に分割すると、
(n×2d)
0 0
(
)(
A 0
0
I (d×d)
0
0 0
0
I (d×d)
0
0 I
(a×a)
0
0
0
0
0
0
0 A(b×d)
=
0
0
0
0
0
(AT )(d×b) 0
0
AT
0
0 0
0 I
)
が成り立つ。
−1
G
0
A
0
0
C ′
AT C ′T 0
0
G
0
A
0
0 C +
=
0T
A
CT 0
0
−1
0
( 0 )
( 0 ) 0 D
0
0
T
D
−1
0 0 (
)
(
)
0 A
−1
G
0 DT 0 0
+ D 0 0 I
0
0
C
=
0 0 I 0
0 0 0 I
T
T
A
C
0
0 I
K
L
M N
K
L
M N
0 0
LT
T
P
Q R
− L T PT Q R D 0
=
T
T
M
Q
S T M
Q
S T 0 0
0 I
N T RT T T U
N T RT T T U
−1
K
L
M N
0 0
(
) (
)
T
0 I
P
Q R
0 DT 0 0
L
D 0
I 0 + 0 0 0 I M T QT S T 0 0
0 I
N T RT T T U
L
M N
(
) KT
L
P
Q R
0 DT 0 0
T
T
0 0 0 I
M
Q
S T
N T RT T T U
K
L
M N
LT
P
Q R
=
M T Q T S T
N T RT T T U
LD N (
) (
)
P D R DT P D I + DT R −1 DT LT DT P DT Q DT R
−
QT D T I + RT D
U
NT
RT
TT
U
T
R D U
ここで、
(証明終り)
系 17 の証明。
320
付録 C 位置天文観観測データの解析と感度解析
証明: 定理 45 を用いる。
−1
−1
A
G
0 A
C′ − 0
0 C
T
A
CT 0
0
Qd
r (
)−1 ( T T
Sd
t
dT Sd 1 + dT t
d Q
dT S dT T′
= − ′T
T
U
rT
tT
uT
T d u 1 + t d
T
t d U
Qd
r (
)
Sd
t
1
U
−1 − dT t
T
=
′
T
dT Sd
(1 + dT t)2 − dT SdU T d u −1 − t d
T
t d U
( T T
)
T
T ′
d Q
d S d T dT t
rT
tT
uT
U
Qd
r
Sd
t
1
T
=
′
T 2
T
d
u
T
(1 + d t) − d SdU
T
t d U
G
0
AT
0
0
T
C′
)
dT t
U
C.11 行列反転の逐次更新に関する定理
321
ここで、dT Sd = ξ 、dT t = tT d = τ − 1 と置けば、
C≡
1
=
1
− ξU
(1 + d
− d SdU
(
)
T T
δP = C Qd(U d Q − (1 + dT t)r T ) + r(−(1 + dT t)dT QT + dT Sdr T )
(
)
= C U QddT QT − τ Qdr T − τ rdT QT + ξrr T
(
)
δQ = C Qd(U dT S − (1 + dT t)tT ) + r(−(1 + dT t)dT S + dT SdtT )
(
)
= C U QddT S − τ QdtT − τ rdT S + ξrtT
(
)
δR′ = C Qd(U dT T′ − (1 + dT t)uT ) + r(−(1 + dT t)dT T′ + dT SduT )
(
)
= C U QddT T′ − τ QduT − τ rdT T′ + ξruT
(
)
δr = C Qd(U dT t − (1 + dT t)U ) + r(−(1 + dT t)dT t + dT SdU )
(
)
= C −QdU + (τ − τ 2 + ξU )r
(
)
δS = C Sd(U dT S − (1 + dT t)tT ) + t(−(1 + dT t)dT S + dT SdtT )
(
)
= C U SddT S − τ SdtT − τ tdT S + ξttT
(
)
δT′ = C Sd(U dT T′ − (1 + dT t)uT ) + t(−(1 + dT t)dT T′ + dT SduT )
(
)
= C U SddT T′ − τ SduT − τ tdT T′ + ξtuT
(
)
δt = C Sd(U dT t − (1 + dT t)U ) + t(−(1 + dT t)dT t + dT SdU )
(
)
= C −U Sd − (τ 2 − τ − ξU )t
)
(
T
δU′ = C T′ d(U dT T′ − (1 + dT t)uT ) + u(−(1 + dT t)dT T′ + dT SduT )
)
(
T
T
= C U T′ ddT T′ − τ T′ duT − τ udT T′ + ξuuT )
)
(
T
δu = C T′ d(U dT t − (1 + dT t)U ) + u(−(1 + dT t)dT t + dT SdU )
(
)
T
= C −U T′ d − (τ 2 − τ − ξU )u
(
)
δU = C tT d(U dT t − (1 + dT t)U ) + U (−(1 + dT t)dT t + dT SdU )
(
)
= C U (1 − τ 2 + ξU )
T
t)2
T
τ2
となる。
(
)
T
T
U′ + δU′ = U′ + C U T′ ddT T′ − τ T′ duT − τ udT T′ + ξuuT )
(
)
T
u + δu = u + C −U T′ d − (τ 2 − τ − ξU )u
= −CU T′ d + Cτ u
(
)
U + δU = U + C U (1 − τ 2 + ξU ) = CU
T
(
Σnew = −
U′
uT
u
U
)
(
−
δU′
δuT
δu
δU
)
(証明終り)
322
付録 C 位置天文観観測データの解析と感度解析
系 46 (拘束条件が一箇所変わる場合)
G
0
AT
0
0
CT
A
C
0
−1
?
= ?
?
?
?
?
?
(
? = ?
?
β
(
? α ?
))
が既知で、i 行に示した j 番目の拘束条件のみが変更になる場合、
(
C′ = 0 . . .
0 cj + δ
0
)
...
と書けば、j ′ を C の第 j 要素が対応する全行列の列番号として、
−1
−1
G
0
A
G
0 A
′
0
0
C = 0
0 C
T
T
T
′T
A
C
0
A
C
0
(
(
)
(
))
+c (1 + αi δ) δ βαT + αβ T − δ 2 αj ′ ββ T + βi ααT
((
)
)−1
c = αj ′ βi − αi2 δ 2 − 2αi δ − 1
証明補題 45 では G の正則性は仮定されていないので、C は一行の行列として一般性を
失わない。補題 45 の記号とこの系の記号を比較すると、L, N, T は一列の行列、Q は一
行の行列、P, R, U, D は一行一列の行列で、
L
P
T = β,
Q
RT
N
R
=α
T
U
である。また、
( )
D= δ ,
( )
P = βi ,
( ) ( )
R = βj ′ = αi ,
( )
U = αj ′
となる。そこで、補題 45 の結果から
A
G
0 A
C ′ − 0
0 C
T
T
A
C
0
0
LD N (
) (
)
P D R DT P D I + DT R −1 DT LT DT P DT Q DT R
= − T
Q D T I + RT D
U
NT
RT
TT
U
T
R D U
(
)−1 ( T )
(
)
βi δ 2
1 + αi δ
δβ
= − δβ α
1 + αi δ
αj ′
αT
(
)( T)
(
)
αj ′
−1 − αi δ
δβ
= −c δβ α
−1 − αi δ
βi δ 2
αT
)
(
(
) αj ′ δβ T − (1 + αi δ)αT
= −c δβ α
βi δ 2 αT − (1 + αi δ)δβ T
)
(
= −c αj ′ δ 2 ββ T − (1 + αi δ)δβαT + βi δ 2 ααT − (1 + αi δ)δαβ T
))
(
)
(
(
= c (1 + αi δ) δ βαT + αβ T − δ 2 αj ′ ββ T + βi ααT
(
)−1 ((
)
)−1
2
c = αj ′ βi δ 2 − (1 + αi δ)
= αj ′ βi − αi2 δ 2 − 2αi δ − 1
G
0
AT
0
0
T
C′
C.12 まとめ
323
(証明終り)
C.12 まとめ
位置天文学のパラメータ値推定や、これに付随する推定分散の推定は、問題自体は単純
だが問題サイズが巨大であり、線形化の範囲内でも巨大行列を取り扱う必要がある。ここ
で述べたように Kalman フィルターの考え方を適用すれば、問題に含まれるサイズパラ
メータ (星の数や張り合わせる視野の数など) に対する漸化式を導出できて、大きな問題
が取り扱い可能となる。
325
参考文献
[Alcock et al., 1998] Alcock, C., Allsman, R. A., Alves, D., Ansari, R., Aubourg, E.,
Axelrod, T. S., Bareyre, P., Beaulieu, J.-P., Becker, A. C., Bennett, D. P., Brehin,
S., Cavalier, F., Char, S., Cook, K. H., Ferlet, R., Fernandez, J., Freeman, K. C.,
Griest, K., Grison, P., Gros, M., Gry, C., Guibert, J., Lachieze-Rey, M., Laurent, B.,
Lehner, M. J., Lesquoy, E., Magneville, C., Marshall, S. L., Maurice, E., Milsztajn,
A., Minniti, D., Moniez, M., Moreau, O., Moscoso, L., Palanque-Delabrouille, N.,
Peterson, B. A., Pratt, M. R., Prevot, L., Queinnec, F., Quinn, P. J., Renault,
C., Rich, J., Spiro, M., Stubbs, C. W., Sutherland, W., Tomaney, A., Vandehei,
T., Vidal-Madjar, A., Vigroux, L., and Zylberajch, S. (1998). EROS and MACHO
combined limits on planetary-mass dark matter in the galactic halo. Astrophysical
Journal Supplement Series, 499:L9–L12.
[Alcock et al., 2000] Alcock, C., Allsman, R. A., Alves, D. R., Axelrod, T. S., Becker,
A. C., Bennett, D. P., Cook, K. H., Dalal, N., Drake, A. J., Freeman, K. C., Geha,
M., Griest, K., Lehner, M. J., Marshall, S. L., Minniti, D., Nelson, C. A., Peterson, B. A., Popowski, P., Pratt, M. R., Quinn, P. J., Stubbs, C. W., Sutherland,
W., Tomaney, A. B., Vandehei, T., and Welch, D. (2000). The MACHO project:
Microlensing results from 5.7 years of large magellanic cloud observations. Astrophysical Journal Supplement Series, 542:281–307.
[Aoki et al., 2002] Aoki, W., Norris, J. E., Ryan, S. G., Beers, T. C., and Ando, H.
(2002). Chemical composition of the carbon-rich, extremely metal poor star cs
29498-043: A new class of extremely metal poor stars with xcesses of magnesium
and silicon. Astrophys. J., 576:L141–L144.
[Asada, 2002] Asada, H. (2002). Perturbative approach to astrometric microlensing
due to an extrasolar planet. Astrophys.J., 573:825–828.
[Belokurov and Evans, 2002] Belokurov, V. A. and Evans, N. W. (2002). Astrometric microlensing with the GAIA satellite. Monthly Notices Roy. Astronom. Soc.,
331:649–665.
[Benedict et al., 2002] Benedict, G. F., McArthur, B. E., Forveille, T., Delfosse, X.,
Nelan, E., Butler, R. P., Spiesman, W., Marcy, G., Goldman, B., Perrier, C.,
Jefferys, W. H., and Mayor, M. (2002). A mass for the extrasolar planet gliese
876b determined from hubble space telescope fine guidance sensor 3 astrometry and
high-precision radial velocities. Astrophysical Journal Supplement Series, 581:L115.
[Benoı̂t et al., 2003] Benoı̂t, A., Ade, P., Amblard, A., Ansari, R., Aubourg, Ê.,
326
参考文献
Bargot, S., Bartlett, J. G., Bernard, J.-P., Bhatia, R. S., Blanchard, A., Bock,
J. J., Boscaleri, A., Bouchet, F. R., Bourrachot, A., Camus, P., Couchot, F.,
de Bernardis, P., Delabrouille, J., Désert, F.-X., Doré, O., Douspis, M., Dumoulin,
L., Dupac, X., Filliatre, P., Fosalba, P., Ganga, K., Gannaway, F., Gautier, B., Giard, M., Giraud-Héraud, Y., Gispert, R., Guglielmi, L., Hamilton, J.-C., Hanany,
S., Henrot-Versillé, S., Kaplan, J., Lagache, G., Lamarre, J.-M., Lange, A. E.,
Macı́as-Pérez, J. F., Madet, K., Maffei, B., Magneville, C., Marrone, D. P., Masi,
S., Mayet, F., Murphy, A., Naraghi, F., Nati, F., Patanchon, G., Perrin, G., Piat,
M., Ponthieu, N., Prunet, S., Puget, J.-L., Renault, C., Rosset, C., Santos, D.,
Starobinsky, A., Strukov, I., Sudiwala, R. V., Teyssier, R., Tristram, M., Tucker,
C., Vanel, J.-C., Vibert, D., Wakui, E., and Yvon, D. (2003). Cosmological constraints from archeops. Astronomy and Astrophysics, 399:L25–L30.
[Binney and Kumar, 1993] Binney, J. and Kumar, S. (1993). Angle variables for
numerically fitted orbital tori. Monthly Notices Roy. Astronom. Soc., 261(3):584–
592.
[Binney and Tremaine, 1987] Binney, J. and Tremaine, S. (1987). Galactic Dynamics.
Princeton University Press.
[Brown, 1955] Brown, D. (1955). A matrix treatment of the general problem of least
squares considering correlated observations. Technical Report 937, Ballistic Research Laboratories, Report, Aberdeen Proving Grounds, Maryland.
[Christlieb et al., 2002] Christlieb, N., Bessell, M. S., Beers, T. C., Gustafsson, B.,
Korn, A., Barklem, P. S., Karlsson, T., Mizuno-Wiedner, M., and Rossi, S. (2002).
A stellar relic from the early milky way. Nature, 419:904–906.
[Cohen, 1992] Cohen, M. (1992).
Powerful model for the point source sky:
Far-ultraviolet and enhanced midinfrared performance.
Astronomical Journal,
107(2):582–593.
[Depagne et al., 2002] Depagne, E., Hill, V., Spite, M., Spite, F., Plez, B., Beers,
T. C., Barbuy, B., Cayrel, R., Andersen, J., Bonifacio, P., François, P., Nordström,
B., and Primas, F. (2002). First stars. ii. elemental abundances in the extremely
metal-poor star cs 22949–037. a diagnostic of early massive supernovae. Astronomy
& Astrophys, 390:187–198.
[Dominik and Sahu, 2000] Dominik, M. and Sahu, K. C. (2000). Astrometric microlensing of stars. Astrophysical Journal Supplement Series, 534:213–226.
[Eichhorn, 1993] Eichhorn, H. (1993). Generalized least-squares adjustment, a timely
but much neglected tool. Celestial Mechanics and Dynamical Astronomy, 56:337–
351.
[Eichhorn and Clary, 1974] Eichhorn, H. and Clary, W. G. (1974). Least squares adjustment with relatively large observation errors, inaccurate initial approximations,
or both. Monthly Notices Roy. Astronom. Soc., 166:425–432.
[Eichhorn and Jeffreys, 1971] Eichhorn, H. and Jeffreys, W. (1971). Rigorous determination of astrometric quantities, especially parallaxes, by photography. Publications of the Leander McCormick Observatory, 16:267–282.
327
[Einchhorn, 1993] Einchhorn, H. (1993). Generalized least-squares adjustment; a
timely but much neglected tool. Celestial Mechanics and Dynamical Astronomy,
56:337–351.
[Einchhorn and Russell, 1976] Einchhorn, H. and Russell, J. (1976). An algorithm for
the statistically rigorous and non-iterative computation of trigonometric parallaxes.
Monthly Notices Roy. Astronom. Soc., 174:679–693.
[ESA, 1997a] ESA (1997a). The Hipparcos and Tycho Catalogues. ESA Publication
SP-1200.
[ESA, 1997b] ESA (1997b). Hipparcos, Venice’97. ESA Publication SP-402.
[Fricke, 1988] Fricke, W., etal. (1988).
Fifth Fundamental Catalogue.
Veroff
Astron.Rechen-Institute, Hidelberg.
[Fricke, 1991] Fricke, W., etal. (1991). Fifth Fundamental Catalogue, PartII. Veroff
Astron.Rechen-Institute, Hidelberg.
[Fuhrmann, 1998] Fuhrmann, K. (1998). Nearby stars of the galactic disk and halo.
Astronomy & Astrophys, 338:161–183.
[Fukugita et al., 1998] Fukugita, M., Hogan, C. J., and Peebles, P. J. E. (1998). The
cosmic baryon budget. Astrophysical Journal Supplement Series, 503:518–530.
[Gamma et al., 1995] Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1995).
Design Patterns Elements of Reusable Object-Oriented Software. Addison Wesey
Longman, Inc.
[Gerhard and Silk, 1996] Gerhard, O. and Silk, J. (1996). Baryonic dark halos: A
cold gas component? Astrophysical Journal Supplement Series, 472:34–45.
[Golomb, ] Golomb, S. W. IEEE Transactions on Information Theory, IT-12(3).
[Gouda et al., 2003] Gouda, N., Tsujimoto, T., KObayashi, Y., Nakajima, T., Matsuhara, H., Yano, T., Yasuda, N., Kan-ya, Y., Yamada, Y., and Ueno, M.
(2003). Introduction of japanese astrometry satellite mission for infrared exploration(jasmine). In Mather, J. C., editor, IR Space Telescopes and Instruments,
Proceedings of the SPIE, volume 4850, pages 1161–1169.
[Gould and Loeb, 1992] Gould, A. and Loeb, A. (1992). Discovering planetary systems through gravitational microlenses. Astrophys. J., 396(1):104–114.
[Hillenbrand, 2000] Hillenbrand, L. (2000).
On the stellar population and star-
forming history of the orion nebula cluster. Astrophys. J., 533:358–371.
[Honma, 2001] Honma, M. (2001). Detecting galactic MACHOs with VERA through
astrometric microlensing of distant radio sources. Publications of the Astronomical
Society of Japan, 53:233–241.
[Høyer et al., 1981] Høyer, P., Høg, E., Poder, I., and Lindegren, L. (1981). Derivation of positions and parallaxes from simulated observations with a scanning astrometry satellite. Astronom. and Astrophys., 101(2):228–237.
[Huffman, 1952] Huffman, D. A. (1952). A method for the construction of minumumredundancy codes. Proceedings of the Institute of Radio Engineers, 40(9).
[Israelian et al., 2003] Israelian, G., Shchukina, N., Rebolo, R., Basri, G., and Gonzalez, G. (2003). Oxygen abundances in ultra-metal-poor giants cs29498-043 and
328
参考文献
cs22949-037
.
http://www.ociw.edu/ociw/symposia/series/symposium4/proceedings.html).
[Iye, 2006] Iye, M. (2006). Science objectives and technology developments for elt’s
in japan.
[JASMINE チーム, 2003] JASMINE チーム (2003). 赤外線位置天文観測衛星 (jasmine)
計画第一回検討報告書.
[Jeong et al., 1999] Jeong, Y., Han, C., and Park, S.-H. (1999). The effect of bright
lenses on the astrometric observations of gravitational microlensing events. Astrophys. J., 511(2):569–573.
[Kaasalainen and Binney, 1994] Kaasalainen, M. and Binney, J. (1994). Torus construction in potentials supporting different orbit families. Monthly Notices Roy.
Astronom. Soc., 268:1033–1040.
[Kalman, 1960] Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. J. Basic Engineering, Transactions ASMA, Series D, 82:35–45.
[Kamaya and Silk, 2002] Kamaya, H. and Silk, J. (2002). Observing baryonic dark
matter with ALMA. MNRAS, 335:L62–L66.
[Kovalevsky, 2002] Kovalevsky, J. (2002). Modern Astrometry. Springer-Verlag Berlin
Heidelberg.
[Kroupa, 2001] Kroupa, P. (2001). On the variation of the initial mass function. Mon.
Not. R. Astron. Soc., 322:231–246.
[Lasserre et al., 2000] Lasserre, T., Afonso, C., Albert, J. N., Andersen, J., Ansari,
R., Aubourg, É., Bareyre, P., Bauer, F., Beaulieu, J. P., Blanc, G., Bouquet, A.,
Char, S., Charlot, X., Couchot, F., Coutures, C., Derue, F., Ferlet, R., Glicenstein,
J. F., Goldman, B., Gould, A., Graff, D., Gros, M., Haissinski, J., Hamilton,
J. C., Hardin, D., de Kat, J., Kim, A., Lesquoy, É., Loup, C., Magneville, C.,
Mansoux, B., Marquette, J. B., Maurice, E., Milsztajn, A., Moniez, M., PalanqueDelabrouille, N., Perdereau, O., Prévot, L., Regnault, N., Rich, J., Spiro, M.,
Vidal-Madjar, A., Vigroux, L., Zylberajch, S., and collaboration, T. E. (2000).
Not enough stellar mass machos in the galactic halo. Astronomy and Astrophysics,
355:L39–L42.
[Lawrence, 2001] Lawrence, A. (2001). Blank-field submm sources, failed stars and
the dark matter. MNRAS, 323:147–158.
[Luri and Arenou, 1997] Luri, X. and Arenou, F. (1997). Utilisation of HIPPARCOS
data for distance determinations: Error, bias and estimation. In Proc. of the ESA
Symposium Hipparcos in Venice ’97, 13-16 May, pages 449–452. ESA SP-402.
[Luri and Babusiaux, 2001] Luri, X. and Babusiaux, C. (2001). The GAIA simulator: reference document.
Technical report, GAIA Simulator working group.
http://gaia.am.ub.es/SWG/.
[Lutz and Kelker, 1973] Lutz, T. E. and Kelker, D. H. (1973). On the use of trigonometric parallaxes for the calibration of luminosity systems: theory. Publications of
the Astronomical Society of the Pacific, 85:573–578.
[Malmquist, 1936] Malmquist, K. G. (1936). Stockholms Ob. Medd., 26.
329
[Mao and Paczynski, 1991] Mao, S. and Paczynski, B. (1991).
Gravitational mi-
crolensing by double stars and planetary systems. Astrophys. J., 374:L37–L40.
[Mazeh et al., 1999] Mazeh, T., Zucker, S., dalla Torre, A., and van Leeuwen, F.
(1999). Analysis of the hipparcos measurements of upsilon andromedae: A mass
estimate of its outermost known planetary companion. Astrophysical Journal Supplement Series, 522:L149–L151.
[McGill and Binney, 1990] McGill, C. and Binney, J. (1990). Torus construction in
general gravitaional potentials. Monthly Notices Roy. Astronom. Soc., 244:634–645.
[Miralda-Escudé, 1996] Miralda-Escudé, J. (1996). Microlensing events from measurements of the deflection. Astrophysical Journal Supplement Series, 470:L113–L116.
[Miyamoto, 1995] Miyamoto, M. & Yoshii, Y. (1995). Astromety for determining the
macho mass and trajectory. Astron. J., 110:1427–1432.
[Muench et al., 2000] Muench, A., Lada, E., and C.J. (2000). Modeling the nearinfrared luminosity functions of young stellar clusters. Astrophys. J., 533:358–371.
[Nickerson et al., 1965] Nickerson, H., Spencer, D., and Steenrod, N. (1965). 現代ベ
クトル解析. 岩波書店. 現題 Advanced Calculus、英語版出版 1959、 D. Van Nostrand
Company, Inc.
[O’Meara et al., 2001] O’Meara, J. M., Tytler, D., Kirkman, D., Suzuki, N.,
Prochaska, J. X., Lubin, D., and Wolfe, A. M. (2001). The deuterium to hydrogen abundance ratio toward a fourth QSO: HS 0105+1619. Astrophysical Journal
Supplement Series, 552:718–730.
[O’Mullane and Lindegren, 1999] O’Mullane, W. and Lindegren, L. (1999).
An
object-oriented framework for GAIA data processing. Baltic Astronomy, 8:57–72.
[Paczyński, 1986] Paczyński, B. (1986). Gravitational microlensing by the galactic
halo. Astrophysical Journal Supplement Series, 304:1–5.
[Paczyński, 1995] Paczyński, B. (1995). The masses of nearby dwarfs can be determined with gravitational microlensing. Acta Astron., 45:345–348.
[Paczyński, 1996] Paczyński, B. (1996). Gravitational microlensing in the local group.
Ann. Rev. Astron. Astrophys., 34:419–460.
[Paczyński, 1998] Paczyński, B. (1998). Gravitational microlensing with the space
interferometry mission. Astrophysical Journal Supplement Series, 494:L23–L26.
[Peng et al., 2004] Peng, Q., Vienne, A., Han, Y. B., and Li, Z. L. (2004). Precise
calibration of ccd images with a small field of view – application to observations of
phoebe. Astronomy and Astrophysics, 424:339–344.
[Perryman, 2000] Perryman, M. (2000). Extra-solar planets. Rep.Prog.Phys., 63:1209.
[Perryman, 2004] Perryman,
2003.
Technical
M.
Report
(2004).
Gaia
in
WG-STATUS-013,
ESA-ESTEC.
http://www.rssd.esa.int/gaia/Assets/Paper/Gaia in 2003.pdf.
[Perryman et al., 2001] Perryman, M. A. C., de Boer, K. S., Gilmore, G., Hog, E.,
Lattanzi, M. G., Lindegren, L., Luri, X., Mignard, F., Pace, O., and de Zeeuw, P. T.
(2001). Gaia: Composition, formation and evolution of the galaxy. Astronom. and
Astrophys., 369:339–363.
330
参考文献
[Perryman et al., 1996] Perryman, M. A. C., Lindegren, L., Arenou, F., Bastian, U.,
Bernstein, H.-H., van Leeuwen, F., Schrijver, H., Bernacca, P. L., Evans, D. W.,
Falin, J. L., Froeschle, M., Grenon, M., Hering, R., Hoeg, E., Kovalevsky, J.,
Mignard, F., Murray, C. A., Penston, M. J., Petersen, C. S., Le Poole, R. S.,
Söderhjelm, S., and Turon, C. (1996). Hipparcos distances and mass limits for the
planetary candidates: 47 ursae majoris, 70 virginis, and 51 pegasi. Astronomy and
Astrophysics, 310:L21.
[Pont, 1999] Pont, F. (1999). The Cepheid distance scale after Hipparcos. In Egret,
D. and Heck, A., editors, Harmonizing cosmic distance scale in a post-Hipparcos
era, ASP conference series, volume 167, pages 113–128. AIP Press.
[Press et al., 1992] Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flannery,
B. P. (1992). Numerical Recipes in C the art of scientific computing(second edition).
Cambridge University Press.
[project team et al., 2002] project team, G. S., Charvet, P., Safa, F., and Koeck, C.
(2002). Gaia system level technical reassessment study, final report. Technical
Report EF5/FR/PC/038.02, ESA. astrium.
[Rice, 1979] Rice, R. F. (1979). JPL Publication, 79(22).
[Safa, 2006] Safa, F. (2006). A summary of the gaia spacecraft design. Technical
Report GAIA-CH-TN-EADS-FS-001-1, ESA.
[Safizadeh et al., 1999] Safizadeh, N., Dalal, N., and Griest, K. (1999). Astrometric microlensing as a method of discovering and characterizing extrasolar planets.
Astrophys. J., 522(1):512–517.
[Scalo, 1998] Scalo, J. (1998). The imf revisited: A case for variations. In G., G. and
D., H., editors, The Stellar Initial Mass Function, ASP Conf. Ser., volume 142,
page 201. Astron. Soc. San Francisco.
[Schwarzschild, 1979] Schwarzschild, M. (1979). A numerical model for a triaxial
stellar system in dynamical equilibrium. Astrophysical Journal Supplement Series,
232:236–247.
[Shigeyama and Tsujimoto, 1998] Shigeyama, T. and Tsujimoto, T. (1998). Fossil
imprints of the first-generation supernova ejecta in extremely metal-deficient stars.
Astrophys. J., 507:L135–L139.
[Shigeyama et al., 2003] Shigeyama, T., Tsujimoto, T., and Yoshii, Y. (2003). Excavation of the first stars. Astrophys. J., 586:L57–L60.
[Spergel et al., 2003] Spergel, D. N., Verde, L., Peiris, H. V., Komatsu, E., Nolta,
M. R., Bennett, C. L., Halpern, M., Hinshaw, G., Jarosik, N., Kogut, A., Limon, M.,
Meyer, S. S., Page, L., Tucker, G. S., Weiland, J. L., Wollack, E., and Wright, E. L.
(2003). First year wilkinson microwave anisotropy probe (WMAP) observations:
Determination of cosmological parameters. astro-ph/0302209.
[Takahashi, 2003] Takahashi, R. (2003). The Astorophysical Journal, in press:***.
[Tsuchiya et al., 1996] Tsuchiya, T., Gouda, N., and Konishi, T. (1996). Relaxation
processes in one-dimensional self-gravitating many-body systems.
53:2210–2216.
Phys.Rev.E,
331
[Tsuchiya et al., 1997] Tsuchiya, T., Gouda, N., and Konishi, T. (1997). Chaotic
itinerancy and thermalization in a one-dimensional self-gravitating system. Ap.&
SS, 257:319–341.
[Tsuchiya et al., 1994] Tsuchiya, T., Konishi, T., and Gouda, N. (1994). Quasiequilibria in one-dimensional self-gravitating many-body systems.
Phys.Rev.E,
50(4):2607–2615.
[Urban et al., 1998] Urban, S. E., Corbin, T. E., and Wycoff, G. L. (1998). The ACT
reference catalog. Astronomical Journal, 115:2161–2166.
[van Veggel et al., 2004] van Veggel, A., Rosielle, P., Nijmeijer, H., Wielders, A., and
Vink, H. (2004). Design of a basic angle monitoring system in silicon carbide. In
Proceedings of the Symposium The Three-Dimensional Universe with Gaia.
[Wainscoat et al., 1992] Wainscoat, R. J., Cohen, M., Volk, K., Walker, H. J., and
Schwartz, D. E. (1992). A model of the 8-25 micron point source infrared sky.
Astrophysical Journal Supplement Series, 83(1):111–146.
[Walker and Wardle, 1999] Walker, M. and Wardle, M. (1999). The cloudy universe.
Publ. Astron. Soc. Australia, 16:262–272.
[Walker, 1995] Walker, M. A. (1995). Microlensed image motions. Astrophys. J.,
453:37–39.
[Walter and Sovers, 2000] Walter, H. and Sovers, O. (2000). Astrometry of Fundamental Catalogues. Springer-Verlag Berlin Heidelberg.
[Will, 1993] Will, C. M. (1993). Theory and Experiment in Gravitational Physics.
Cambridge: Cambridge Univ. Press.
[Yano et al., 2006] Yano, T., Gouda, N., and Yamada, Y. (2006). Absolute parallaxes
for narrow field astrometry. Publications of the Astronomical Society of the Pacific.
submitted.
[Yu et al., 2004] Yu, Y., Tang, Z.-H., Li, J.-L., Wang, G.-L., and Zhao, M. (2004).
Block adjustment of a group of oberlapping ccd images. Astronomical Journal,
128:911–919.
[歌島昌由, 2004a] 歌島昌由 (2004a). L2 点リサジュ軌道の設計 (その 1). Technical
Report GSB-03019, JAXA.
[歌島昌由, 2004b] 歌島昌由 (2004b). L2 点リサジュ軌道の設計 (その 2). Technical
Report GSB-04001, JAXA.
[歌島昌由, 2004c] 歌島昌由 (2004c). ゼロ δv リサジュ基準軌道の作成 (その 1). Technical
Report GSB-04029, JAXA.
[歌島昌由, 2004d] 歌島昌由 (2004d). ゼロ δv リサジュ基準軌道の作成 (その 1) 補遺.
Technical Report GSB-04033, JAXA.
[歌島昌由, 2004e] 歌島昌由 (2004e). ゼロ δv リサジュ基準軌道の作成 (その 2). Technical
Report GSB-04038, JAXA.
[歌島昌由, 2004f] 歌島昌由 (2004f). ゼロ δv リサジュ基準軌道の作成 (その 3). Technical
Report GSB-04045, JAXA.
[歌島昌由, 2004g] 歌島昌由 (2004g). 黄道面内の地球ランデブ軌道. Technical Report
GSB-03022, JAXA.
332
参考文献
[歌島昌由, 2004h] 歌島昌由 (2004h). 高高度略円極軌道と l2 点軌道の比較. Technical
Report GSB-04013, JAXA.
[歌島昌由, 2004i] 歌島昌由 (2004i). 高高度略円極軌道への月潮汐力の影響. Technical
Report GSB-04022, JAXA.
[歌島昌由, 2004j] 歌島昌由 (2004j). 高高度略円極軌道への太陽潮汐力の影響. Technical
Report GSB-04007, JAXA.
[歌島昌由, 2004k] 歌島昌由 (2004k). 太陽 − 地球 l2 点回りのリサジュ基準軌道 の設計.
Technical Report JAXA-RR-04-021(ISSN 1349-1113), JAXA.
[歌島昌由, 2004l] 歌島昌由 (2004l). 太陽 − 地球系 l1, l2 点軌道の軌道決定の概要.
Technical Report GSB-04032, JAXA.
[歌島昌由, 2004m] 歌島昌由 (2004m). 地球ランデブ軌道の蝕の検討. Technical Report
GSB-03025, JAXA.
[歌島昌由, 2004n] 歌島昌由 (2004n). 地球ランデブ軌道への投入法. Technical Report
GSB-03017, JAXA.
[歌島昌由, 2006] 歌島昌由 (2006). 静止軌道の速度推定誤差. Technical Report JASMINE06062809, JAXA.
[宮本昌典, 1997] 宮本昌典 (1997). 位置天文学. 東京大学講義ノート.
[郷田直輝, 2000] 郷田直輝 (2000). 自己重力多体系の物理. 数理科学 2000 年 3 月号.
[具志堅隆児 et al., 2002] 具志堅隆児, 垣花一成, and 倉骨彰 (2002). 実践的 UML 入
門–IIOSS で始める新世紀プログラミング. 株式会社 ASCII.
[山田良透, 2004] 山田良透 (2004). (依頼記事) 赤外線位置天文観測衛星 (jasmine) 計画に
使われるオブジェクト指向技術. 情報処理, 45(12).
[山田良透, 2005] 山 田 良 透 (2005).
無 題.
2005/8/26 シ ス テ ム 検 討 会 資 料
http://www2.jasmine-galaxy.org/member/2005/082606.pdf.
[山田良透 et al., 2007] 山田良透, 酒匂信匡, 初鳥陽一, 片岸秀明, 田中崇資, 稲守孝哉, 山
内雅浩, 矢野太平, and 郷田直輝 (2007). Nano-jasmine シミュレータ. 国立天文台報,
10(1-2).
[山田良透 et al., 2005] 山田良透, 上田誠治, 奥村晴彦, 矢野太平, and 郷田直輝 (2005).
Jasmine プロジェクトのためのデータ圧縮技術. 国立天文台報, 8(1-2).
[山田良透 et al., 2004] 山田良透, 上田誠治, 桑原立, 矢野太平, and 郷田直輝 (2004).
Jasmine シミュレーター –フレームワークの構築–. 国立天文台報, 7(3-4).
[須山章子 et al., 2003] 須山章子, 亀田常治, and 伊藤義康 (2003). 高強度反応焼結炭化
ケイ素セラミックス. 東芝レビュー, 58(5):46–49.
[赤池弘次 et al., 1998] 赤池弘次, 尾崎統, and 北川源四郎 (1998). 時系列解析の方法. 朝
倉書店. ISBN:4254125852.
[丹羽敏雄, 1981] 丹羽敏雄 (1981). 力学系. 紀伊國屋書店.
[中野藤生・服部眞澄, 1994] 中野藤生・服部眞澄 (1994). エルゴード性とは何か. パリ
ティ物理学コース, 丸善.
333
索引
記号/数字
H
元素・化合物・素材
HIPPARCOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
HIPPARCOS 衛星 . . . . . . . . . . . . . . . . . . . . . . . . . 113
Fe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Mg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Si . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
人名
Hipparchus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
A
adjustment parameter(s) . . . . . . . 参照 パラメータ
AGN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
ant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
approximation set . . . . . . . . . . . . 参照 近似値の集合
A プロジェクト室 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
I
IAU シンポジウム 248 . . . . . . . . . . . . . . . . . . . . . . . . 20
IAU 総会 2006 年 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
ICRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28, 30
ICRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32, 114
IMF. . . . . . . . . . . . . . . . . . . . . . . . . . 参照 初期質量関数
ISO-2022-JP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
J
ca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
CDR . . . . . . . . . . . . . . . . . . . . . . . . . 参照 詳細設計審査
centroid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80, 91, 181
centroiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
centroid 誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159
CMB . . . . . . . . . . . . . . . . . . . . . . . . . 参照 宇宙背景放射
condition equation . . . . . . . . . . . 参照 等式制約条件
covariance matrix . . . . . . . . . . . . . . 参照 共分散行列
CS22949-037 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
CS29498-043 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
CTI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
cvs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
C プロジェクト室 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Jama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
Japan Torus Construction Project . . . . . . . . . 125
JASMINE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
JASMINE Simulator . . . . . . . . . . . . . . . . . . . . . . 207
イベント処理 . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
軌道 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
機能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
クラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
姿勢 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
姿勢制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
実装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
データ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
箱 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
バス部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
フレームワーク . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
JAVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
JTPF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
D
K
DAG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
Debian Linux. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .246
Directed Acyclic graph . . . . . . . . . . . . . . . . . . . . 247
distrosion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
DIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
KW バンド . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
B
B プロジェクト室 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
C
E
Eclipse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
effective temperature . . . . . . . . . . . . . 参照 有効温度
emptyset . . . . . . . . . . . . . . . . . . . . . . . . . . . 参照 空集合
ESA . . . . . . . . . . . . . . . . . . . 参照 ヨーロッパ宇宙機関
estimate(s) . . . . . . . . . . . . . . . . . . . . . . . . . 参照 推定値
F
FAME. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
figure rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
FK5 Extension カタログ . . . . . . . . . . . . . . . . . . . 113
FK5 星表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
G
GAIA . . . . . . . . . . . . . . . . . . . . 20, 28, 116, 125, 137
L
Lagrange 未定乗数 . . . . . . . . . . . . . . . . . . . . . . . . . 303
Lagrangian multiplier(s) 参照 Lagrange 未定乗数
LMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
LRR . . . . . . . . . . . . . . . . 参照 打ち上 げ準備完了審査
Lutz-Kelker バイアス . . . . . . . . . . . . . . . . . . 129, 177
M
MACHO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132, 137
Malmquist バイアス . . . . . . . . . . . . . . . . . . . . . . . . 175
MDA . . . . . . . . . . 参照 Model Driven Architecture
MDR . . . . . . . . . . . . . . . . . . 参照 ミッション定義審査
MDSE . 参照 Model Driven System Engineering
metallicity . . . . . . . . . . . . . . . . . . . . . . . . . 参照 金属量
Model Driven Architecture . . . . . . . . . . . . . . . . 147
Model Driven System Engineering . . . . . . . . . 147
ms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
multivariate normal distribution 参照 多変量正規
分布
334
索引
N
Nano-JASMINE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
NASA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
non-LTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
normal equation . . . . . . . . . . . . . . . . 参照 正規方程式
VISTA 広視野望遠鏡 . . . . . . . . . . . . . . . . . . . . . . . . . 41
VLBI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
W
Windows XP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
O
Z
observation(s) . . . . . . . . . . . . . . . . . . . . . . 参照 観測量
observing error(s) . . . . . . . . . . . . . . . . 参照 観測誤差
Origin 計画 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
zerodur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
P
parallax factor . . . . . . . . . . . . . . . . . . . . . . . . 159, 161
pc. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 参照 パーセク
PDR . . . . . . . . . . . . . . . . . . . . . . . . 参照 基 本設計審査
photon noise limit . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Pogson の法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .176
Point Spread Function . . . . . . . . . . . . . . . . . . . . . . 39
Q
QSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92, 114
QSO 観測時間 . . . . . . . . . . . . . . . . . . . . . . . . . 159, 163
QSO 基準位置誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . 159
quadratic form . . . . . . . . . . . . . . . . . . . 参照 二次形式
R
Rc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
rigidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
rQSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
rread . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
rs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
rshort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159
rstl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
RW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
S
SDR . . . . . . . . . . . . . . . . . . . . . 参照 システム定義審査
set of quantities . . . . . . . . . . . . . . . . 参照 真値の集合
SiC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
SIM . . . . . . . . . . . . . . . . . . . . . . . . . . . 20, 28, 116, 137
SRR . . . . . . . . . . . . . . . . . . . . . 参照 システム要求審査
STM . . . . . . . . . . . . . . . . . . . . . 参照 環境試験用モデル
T
TDI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
TPF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
U
UML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
Unified modeling language . . . . . . . . . . . . . . . . . 210
unknown(s) . . . . . . . . . . . . . . . . . . . . 参照 パラメータ
utf-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
V
V
Vatt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Vattc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Vcentroid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
VLF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
VLF2mission . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Voptics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Vpar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
VQSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Vreadout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Vsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
VERA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28, 125
VERA 計画 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
あ
アインシュタイン・リング . . . . . . . . . . . . . . . . . . . 132
アインシュタイン半径 . . . . . . . . . . . . . . . . . . . . . . . 138
アインシュタイン理論 . . . . . . . . . . . . . . . . . . . . . . . 133
天の川銀河 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
暗黒物質 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
位相分布関数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
位置天文学 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
位置マイクロレンズ . . . . . . . . . . . . . . . . . . . . . . . . . 137
イベント駆動型プログラム . . . . . . . . . . . . . . . . . . . 246
打ち上げ準備完了審査 . . . . . . . . . . . . . . . . . . . . . . . . 95
宇宙科学研究 本部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
宇宙線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28, 91, 183
宇宙時計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
宇宙背景放射 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
運用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
打ち上げ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
キャリブレーション . . . . . . . . . . . . . . . . . . . . . . 68
緊急モード . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
システムチェックアウト . . . . . . . . . . . . . . . . . . 68
初期運用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
通常観測 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
冬季運用モード . . . . . . . . . . . . . . . . . . . . . . . . . . 68
運用デューティー . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
衛星
位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35, 47, 195
姿勢 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
衛星位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
衛星位置精度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
衛星速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
衛星速度精度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
永年変形 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88, 90
エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
エラーバジェット . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
エルゴード性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
横断速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
黄道光 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 92
帯法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 参照 解析手法
オブジェクト指向 . . . . . . . . . . . . . . . . . . . . . . 208, 247
composite pattern . . . . . . . . . . . . . . . . . . . . . 213
オブジェクト . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
オブジェクト図 . . . . . . . . . . . . . . . . . . . . . . . . . 249
カプセル化 . . . . . . . . . . . . . . . . . . . . . . . . 211, 248
クラス . . . . . . . . . . . . . . . . . . . . . . . . 211, 212, 247
クラス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
継承 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211, 248
コラボレーション図 . . . . . . . . . . . . . . . . . . . . . 249
シーケンス図 . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
実装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
状態図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
設計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
属性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210, 247
多相性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211, 248
抽象化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211, 248
抽象クラス . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
デザインパターン . . . . . . . . . . . . . . . . . . . . . . . 249
メソッド . . . . . . . . . . . . . . . . . . . . . . . . . . 210, 247
温度安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
335
温度センサー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
か
解析手法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
帯法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
開発完了審査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
化学組成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
可視時間 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
褐色矮星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
環境 試験用モデル . . . . . . . . . . . . . . . . . . . . . . . . . . 100
干渉計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
完全空乏裏面照射型 CCD 検出器 . . . . . . . . . . . . . . 41
観測誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
観測バンド . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
観測方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
観測量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
感度解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
ガンマ線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
季節の係数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
軌道 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38, 47, 88, 90
L2 軌道 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
高高度略円極軌道 . . . . . . . . . . . . . . . . . . . . . . . . 47
静止高度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
基本座標系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
基本設計審査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
キューイング . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
球面構築 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
共分散行列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
巨大ぶらっくほーる . . . . . . . . . . . . . . . . . . . . . . . . . . 24
巨大分子雲 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
距離 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
距離指標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
銀河
渦巻き銀河 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
活動性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
形成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24, 125
進化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24, 125
中心 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
ディスク
thick disk . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
thin disk . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
バー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
バルジ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
近似値の集合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
金属量欠乏星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
金属量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24, 126
空集合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
系外惑星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131, 133
形状案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
系統誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80, 91, 113
flat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28, 41, 91
熱変動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
ノイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
配列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
元素合成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125, 137
光学系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91, 195
Korsch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
off-axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
on-axis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Ritchey-Chretien . . . . . . . . . . . . . . . . . . . . . . . 39
光学素子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
光源の軌道 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
光行差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34, 195
光子一個当たりの分散 . . . . . . . . . . . . . . . . . . . . . . . 157
光子流束 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
構成物理学 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
コードコンベンション . . . . . . . . . . . . . . . . . . 242, 246
国際天文基準座標系 . . . . . . . . . . . . . . . . . . . 参照 ICRS
国立天文台 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
固有運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18, 113
絶対固有運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
孤立積分 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
混合性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
コントロールモーメンタムジャイロ . . . . . . . . . . . . .46
コンピューター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
さ
サーベイ領域 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
最小二乗法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159, 177
材料 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
撮像時間 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
座標系
照合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
三軸不等 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
システム定義審査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
子午環 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
自己重力多体系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
システムエンジニアリング . . . . . . . . . . . . . . . . . . . 147
システム要求審 査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
姿勢 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
姿勢安定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
姿勢安定性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
姿勢安定度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
姿勢擾乱 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
姿勢擾乱誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
姿勢制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46, 99, 198
姿勢制御誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
姿勢制御精度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
視線速度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
実装モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
質量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
質量放出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
視野角面積 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
集中検討 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79, 87
周波数安定化レーザー . . . . . . . . . . . . . . . . . . . . . . . . 81
重量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
重力場 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
重力理論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
重力レンズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132, 134
重力レンズ効果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
シュバルツシルトの方法 . . . . . . . . . . . . . . . . . . . . . 124
詳細 設計審査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
焦点距離 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
小フレーム . . . . . . . . . . . . . . . . . . . . . . 26, 28, 32, 184
仕様モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
初期質量関数 . . . . . . . . . . . . . . . . . . . . . . . . . . 124, 127
真値の集合 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
振動試 験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
推定
長さ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
推定値 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
スカラー・テンソル理論 . . . . . . . . . . . . . . . . . . . . . 133
スタートラッカー . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
スペース干渉計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
赤外線アレイ検出器 . . . . . . . . . . . . . . . . . . . . . . . . . . 41
正規方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
星像 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
星像 Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
星像ウィンドー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
星像切り出し . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
星像中心推定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
PSF fitting . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
重心法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
静定時間 . . . . . . . . . . . . . . . . . . . . . . . . . . . 91, 159, 163
生命体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
設計モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
336
索引
前主系列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
相対論効果 . . . . . . . . . . . . . . . . . . . . . . . . . . 35, 93, 202
相対論補正 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
速度情報 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
素材 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65, 91, 196
測光 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 92
た
ダークマター . . . . . . . . . . . . . . . . . . . . . . . . . . 122, 137
大円解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
大フレーム . . . . . . . . . . . . . . . . . 26, 29, 32, 184, 199
大フレームから全ミッション連結誤差 . . . . . . . . . 159
大フレーム連結誤差 . . . . . . . . . . . . . . . . . . . . . . . . . 159
耐放射線特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
多層断熱 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
多変量正規分布 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
単一星比率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
短期運用時間 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
短距離力系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
地上局 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
チップチルト . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
中心 pixel エネルギー率 . . . . . . . . . . . . . . . . . . . . . 158
長距離力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
超弦理論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
超新星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125, 127
Ia 型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
II 型 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
潮汐力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88, 90
通信系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
通信 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67, 88
通信量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
低温ガス雲 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
定常運用移行審査 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
ティップティルトミラー . . . . . . . . . . . . . . . . . . . . . . 46
デザインパターン . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
電波 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
電波座標系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
天文座標系 . . . . . . . . . . . . . . . . . . . . . . 参照 基本座標系
電力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
統計力学 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
搭載アンテナ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
等式制約条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
同時座標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
トーラス構築法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
な
二次形式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
熱 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88, 90
構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
周期 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
詳細モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
素材 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
単純なモデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
熱容量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
ヒーター制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
熱安定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
熱解析
定常 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
非定常 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
熱環境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
熱構造モデル . . . . . . . . . . . . . 参照 環境試験用モ デル
熱試験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
熱制御
active . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
ALOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
passive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
SPICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
熱制御材 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
熱伝導率
CFRP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
熱膨張率
CFRP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
SiC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
ゼロ膨張ガラス . . . . . . . . . . . . . . . . . . . . . . . . . . 58
年周視差 . . . . . . . . . . . . . . . . . . . . . . . . . . . 18, 113, 157
絶対年周視差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
は
パーセク . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
白色矮星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
波面誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
パラメータ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
パララックス効果 . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
バルジ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
ハロー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
バンド幅 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
非 Latin-1 文字 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
光ジャイロ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
比熱
A6061 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
表面重力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
フィールド星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
フィルター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
カルマンフィルター . . . . . . . . . . . . . . . . . . . . . 247
物性
鏡面材料 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
ブラックホール . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
フレーム連結 . . . . . . . . . . . . . . . . . . . . . . . . 26, 34, 184
プロジェ クト移行審査 . . . . . . . . . . . . . . . . . . . . . . . . 95
プロジェクト準備審査 . . . . . . . . . . . . . . . . . . . . . . . . 95
ベーシックアングル . . . . . . . . . . . . . . . . . . . . . . . . . 153
変光星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
セファイド . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
放射線 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
形成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
形成率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
進化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
ポテンシャルウェル . . . . . . . . . . . . . . . . . . . . . . . . . 158
ま
マイクロレンズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
マイクロレンズ効果 . . . . . . . . . . . . . . . . . . . . . . . . . 137
マックスウェル・ボルツマン分布 . . . . . . . . . . . . . 121
マヌーバ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
ミッション提案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
ミッション定義 審査 . . . . . . . . . . . . . . . . . . . . . . . . . . 95
無線機 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
目標等級 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
モザイク配列 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
モニター装置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
や
有効温度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
要求
焦点面変動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
要求分析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25, 95, 149
要求モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
ヨーロッパ宇宙機関 . . . . . . . . . . . . . . . . . . . . 113, 116
読み出し時間 . . . . . . . . . . . . . . . . . . . . . . . . . . 159, 163
読み出しノイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
読み出しノイズ誤差 . . . . . . . . . . . . . . . . . . . . . . . . . 159
ら
ランダム誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
リアクションホイール . . . . . . . . . . . . . . . . . . . . . 46, 99
力学構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19, 121
337
理想ミッション時間 . . . . . . . . . . . . . . . . . . . . . . . . . 158
理想的ミッション時間 . . . . . . . . . . . . . . . . . . . . . . . 159
レーザー干渉計 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
ジオメトリーモニター . . . . . . . . . . . . . . . . . . . . 42
ジオメトリモニター . . . . . . . . . . . . . . . . . . . . . . 81
歪みモニター . . . . . . . . . . . . . . . . . . . . . . . . . 43, 81
ヘテロダイン型 . . . . . . . . . . . . . . . . . . . . . . . . . . 43
マッハ・ツェンダー . . . . . . . . . . . . . . . . . . . . . . 44
連結誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
連星 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
わ
惑星系 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
© Copyright 2026 Paperzz