は(株)SENTROLの登録商標です。
- 本説明書は、SENTROL 308/306/304/303/358/356/354/353に対する適用説明書です。
- SENTROL 308/306/304/303 と SENTROL 358/356/354/353 の機種の差は、メインユニッ
トと結合される画面表示/キー入力装置によって次のように区分されます。
機種
SENTROL308/306/304/303
SENTROL358/356/354/353
画面表示/キー入力装置
DKU
USER PC (WINDOWS XP/VISTA/7/8)
- 本文中、下記の略称を使用することがあります。
機種
SENTROL308/306/304/303
SENTROL358/356/354/353
略称
SENTROL300
SENTROL350
• 本書の無断転載を禁じます
• 本制御装置の外観および仕様は改良のために変更になることがあり
ます。
本説明書にはできるだけ多様な内容を記述しようと努力しています。
しかし、「このようなことをしてはいけません」、「このようなこと
は可能ではありません」ということは、説明書の規模が膨大になるの
で、記載していません。
それで、本書で特別に「可能です」と記載していないことは「可能で
はない」と解釈して下さい。
安全な保守のために
安全な保守のために
本説明書は、CNC装置が装着された機械(以下、機械と称する)をより安全に保守するため
に、CNC装置における安全のための注意事項を説明しています。
CNC装置の保守作業は、様々な危険がともなうのでので、保守および安全に対して十分に教
育を受けた人のみが行って下さい。
使用されるCNC装置によっては、対応する機能がないために、該当しない注意事項があるの
で、その場合は、読み飛ばして下さい。
機械の安全に関する注意事項については、機械メーカ発行の説明書も参照して下さい。
また、保守作業で機械のプログラミングや操作、運転確認などを行う時は、機械メーカ発行
の説明書と本説明書を十分に理解した上で使用して下さい。
目
次
1.警告、注意、注について ··························································S-2
2.保守作業に関する警告および注意 ··········································S-3
3.交換作業に関する警告および注意 ··········································S-5
4.パラメータに関する警告および注意 ······································S-6
5.日常保守に関する警告 ······························································S-7
S-1
安全な保守のために
1
警告、注意、注について
本説明書では、保守作業者(以下、使用者と称する)の安全および機械の破損防止の
ために、安全に関した注意事項の程度によって、本文中に『警告』および『注意』
の表記をしています。
また、補足的な説明を記述するために『注』の表記をしています。
使用する前に『警告』、『注意』、『注』に記載されている事項を良く読んで下さ
い。
警 告
取り扱いを誤った場合に、使用者が死亡または重傷を負う危険の状態が生じること
が想定される場合に用いられます。
注 意
取り扱いを誤った場合に、使用者が軽傷を負うかまたは物的損害のみが発生する危
険の状態が生じることが想定される場合に用いられます。
注
警告または注意以外のことで、補足的な説明を記述する場合に用いられます。
S-2
安全な保守のために
2
保守作業に関する警告および注意
警 告
1.強電盤のドアを開けて確認作業を行う場合
⑴ 強電盤には高電圧部分(
マーク部分)があります。高電圧部分に触れると
感電する可能性があります。
高電圧部分にカバーがついていることを確認して作業をして下さい。
また、高電圧部分の確認を行う場合、端子に直接触れると感電します。
⑵ 強電盤内には、各種ユニットの角などの突起物があります。
突起物で怪我をする可能性があるので、注意して作業を行って下さい。
2.機械カバーを外した状態で運転状況を確認する場合
⑴ 衣類が主軸等に巻き込まれ、怪我をする可能性があります。
衣類が主軸等に巻き込まれない十分離れた距離で、運転を行って下さい。
⑵ 運転は実加工を行わない空運転で行って下さい。
やむをえず実加工を行う時は、機械の誤動作によりワークのクランプが外れ
ることや、工具の刃先が破損して飛び散ることがあり、怪我をする可能性が
ありますので、安全な位置で確認作業を行って下さい。
3.ワークを実際に加工する場合には、いきなり起動させずに、シングルブロッ
ク、送り速度オーバーライド、マシンロックなどの機能を利用したり、工具や
ワークを取り付けずに運転するなどして、機械の動作が正しいことを十分に確
認しておいて下さい。確認が不十分だった場合、機械の予期しない動きにより
ワークや機械などが破損したり、怪我をする可能性があります。
4.入力したいデータが正しく入力されたことを十分確認して、その後の操作を
行って下さい。
使用者がデータの誤りに気が付かずに運転すると、機械の予期しない動きによ
りワークや機械などが破損したり、怪我をする可能性があります。
S-3
安全な保守のために
警 告
5.送り速度は運転内容に対して適正な値が指令されていることを確認して下さ
い。一般的には機械ごとに最高送り速度は制限されています。運転の内容に
よっても最適な速度は異なりますので、機械の説明書にも従って下さい。
正しくない速度で運転すると、機械に予期しない負荷がかかり、ワークや機械
などが破損したり、怪我をする可能性があります。
6.工具補正機能を使用する場合は、補正方向、補正量を十分確認して下さい。使
用者がデータの誤りに気が付かずに運転すると、機械の予期しない動きにより
ワークや機械などが破損したり、怪我をする可能性があります。
S-4
安全な保守のために
3
交換作業に関する警告および注意
警 告
1.必ずCNC装置の電源と強電盤部のメイン電源両方をオフして下さい。CNC電源の
みオフした場合、サーボ部の電源が生きている可能性があり、ユニット交換
時、ユニットを破損したり、感電する可能性があります。
2.サーボアンプやスピンドルアンプでは、電源をオフしてもしばらくは電圧が
残っており、触れると感電します。
3.重量物を交換する場合、2人以上で交換するようにして下さい。1人の場合、
交換ユニットを落として怪我をする場合があります。
4.ユニット交換では、交換時のユニットと交換後のユニットの設定やパラメータ
を同一にして下さい。(詳細は該当装置の説明書を参照して下さい。同一でな
い状態で運転すると、機械の予期しない動きによりワークや機械などが破損し
たり、怪我をする可能性があります。
S-5
安全な保守のために
4
パラメータに関する警告および注意
警 告
1.パラメータを変更した後最初にワークを実際に加工する場合には、機械カバー
を閉めた状態で運転して下さい。自動運転はいきなり起動させずに、シングル
ブロック、送り速度オーバライド、マシンロックなどの機能を利用したり、工
具やワークを取り付けずに運転するなどして、機械の予期しない動きにより
ワークや機械などが破損したり、怪我をする可能性があります。
注 意
2.CNCや内部PLCのパラメータは最適な値が設定されており、通常は変更の必要が
ありません。何らかの理由でパラメータを変更する場合は、そのパラメータの
働きを十分に理解した上で変更して下さい。
パラメータの設定を誤ると、機械の予期しない動きによりワークや機械などが
破損したり、怪我をする可能性があります。
S-6
安全な保守のために
5
日常保守に関する警告
警 告
1.アブソリュートエンコーダ用電池の交換
本作業は、保守および安全に関して教育を受けた人以外は、作業をしてはいけ
ません。
キャビネットを開けて、バッテリの交換をする際には、高電圧回路部分(
マークが付いており、感電防止カバーで覆われています。)には触れないよう
注意して下さい。
カバーが外れていて、その部分に触れると感電します。
注
アブソリュートエンコーダは絶対位置を保持する必要があるため、バッテリを
使用しています。
バッテリの電圧が低下すると、LCD画面又はACサーボドライブにアブソリュート
エンコーダのバッテリ電圧低下アラームが表示されます。
バッテリ電圧低下のアラームが表示されたら、すぐに交換して下さい。バッテ
リを交換しないとアブソリュートエンコーダ内部の絶対位置データを失いま
す。正常にCNCが動作しなくなります。バッテリの交換は各ACサーボモータメー
カの説明書を参照して下さい。
S-7
安全な保守のために
警 告
2.ヒューズの交換
ヒューズの交換作業はヒューズが切れた原因を取り除いてから、行う必要があ
ります。
このため、保守および安全に関して教育を受けた人以外は、作業をしてはいけ
ません。
キャビネットを開けて、ヒューズの交換をする際には、高電圧回路部分(
マークが付いており、感電防止カバーで覆われています。)には触れないよう
注意して下さい。
カバーが外れていて、その部分に触れると感電します。
S-8
目
次
第 1 章 障害の追跡および処理
1.障害の追跡方法 ·············································································································1-1
2.アラームメッセージおよび処置 ·················································································1-2
2.1 アラーム番号の区分 ························································································1-2
2.2 アラームリスト ································································································1-3
1) プログラムミス (P/Sアラーム) ·······················································1-3
2) ファイル管理アラーム ·············································································1-12
3) 通信アラーム (SR SEND/RECEIVEアラーム) ···············1-13
4) 温度、電源関係アラーム ·········································································1-15
5) オーバトラベルアラーム ·······································································1-16
6) 外部データ入力関連アラーム ·································································1-17
7) リジッドタップ関連アラーム ·································································1-18
8) ハードウェア設定関連アラーム ·········································································1-19
9) サーボ関連アラーム ·················································································1-20
10) RAM運転関連アラーム ·······································································1-22
11) DATA異常関連アラーム ···································································1-22
12) システムアラーム ···················································································1-23
2.3 "500~505 STORED STROKE LIMIT ALARM"に対する詳細説明 ················1-24
2.4 "1000~2099 シーケンス関連アラームおよび無番号アラーム"
に対する説明 ·································································································1-25
3.アラームヒストリーの機能および操作 ·····································································1-26
3.1 機能 ····················································································································1-26
3.2 画面の説明 ········································································································1-26
3.3 記号の説明 ········································································································1-28
4.NCの機能および動作異常 ·························································································1-29
(1) 手動パルス発生器で運転できない. ······························································1-29
(2) 同期送り(ねじ切り)運転ができない ··························································1-30
(3) 自動運転ができない ······················································································1-31
(4) 原点復帰位置が正しくない ············································································1-32
<原点復帰位置の調整方法> ················································································1-33
5. 画面の異常 ···················································································································1-36
5.1 電源オンスイッチを押しても画面が現れない ············································1-36
5.2 画面が消える ····································································································1-37
3.3 画面に縞が現れる ····························································································1-37
6.電源オンの異常 ·············································································································1-38
7.通信障害 ·························································································································1-39
第 2 章 サーボ
1.サーボ関連NCアラーム(詳細) ·················································································2-1
第 3 章 スピンドル
1.トラブルシューティング方法 ·····················································································3-1
1.1 トラブル発生時の確認事項 ············································································3-1
1.2 第1段階 ············································································································3-1
第 4 章 設置および調整
1.NC装着時の検査および調整 ·····················································································4-1
2.電源電圧の確認および調整 ·························································································4-5
2.1 入力電圧の確認 ································································································4-5
2.2 ヒューズ ············································································································4-5
2.3 DC電圧の確認 ································································································4-6
3. 各プリント基板のボリューム ···················································································4-6
4. 画面の調整方法 ···········································································································4-7
5.サーボの調整方法 ·········································································································4-8
5.1 パラメータの設定 ····························································································4-8
5.2 ゼロセッティング ····························································································4-9
5.3 ポジションループゲインの調整 ····································································4-10
5.4 オーバシュート、アンダーシュートの調整 ················································4-11
5.5 負荷トルクの調整 ····························································································4-12
5.6 サーボ波形表示機能 ························································································4-13
第 5 章 SENTROL 300/350のハードウェア
1. システム構成 ···············································································································5-1
2. メインユニットの構成 ·······························································································5-2
2.1 SENTROL 306/356 ······························································································5-2
2.2 SENTROL 304/354 ······························································································5-3
2.3 SENTROL 308/358 ······························································································5-4
2.4 SENTROL 303/353 ······························································································5-5
3.コネクタの配置図 ·········································································································5-6
3.1 メインユニットのコネクタ ············································································5-6
3.2 DKU(Display Keyboard Unit)のコネクタ ··············································5-9
3.3 EPS8基板のコネクタ及びヒューズ ································································5-10
3.4 DIO8基板のコネクタ ························································································5-11
3.5 PSU10(DC24V電源ユニット)のコネクタ ························································5-11
3.6 SID3基板のコネクタ及びヒューズ ································································5-12
3.7 SPS8基板のヒューズ ························································································5-13
3.8 DIO4基板のコネクタ及びヒューズ ································································5-13
4.設置 ·································································································································5-14
5. ユーザPCの仕様 ·······································································································5-21
6. ユーザPC設置の注意点 ···························································································5-21
第 6 章 自己診断
1. "診断"画面を見る方法 ···························································································6-1
2. PLC診断 ···················································································································6-2
2.1 PLC信号リスト1(アドレス番号順) ····················································6-2
2.2 PLC信号リスト2(機能順) ····································································6-41
3. PLCモニタ機能 (PLCタイミングチャート機能) ···································6-52
3.1 概要 ················································································································6-52
3.2 モニタ機能を始める方法 ············································································6-52
3.3操作方法 ··········································································································6-53
4. 一般診断 ·······················································································································6-59
第 7 章 パラメータ
1. パラメータ設定 ···········································································································7-1
1.1 パラメータの設定方法 ····················································································7-1
1.1.1 操作パラメータの設定方法 ·······························································7-1
1.1.2 保守パラメータの設定方法 ·······························································7-2
1.1.3 ピッチ誤差補正パラメータの設定方法 ···········································7-3
2. NCのパラメータ一覧 ···································································································7-5
3. 機能別パラメータリスト ···························································································7-126
3.1 パラメータリスト 1 (ユーザ用) ································································7-127
3.2 パラメータリスト 2 (システム構成者用) ··············································7-132
第 8 章 日常保守
1. 保守用器具 ···················································································································8-1
2. エアフィルタ ···············································································································8-1
3. アフターサービス要請時の確認事項 ·······································································8-2
付
録
1. 基本インターフェイス接続図(SENTROL 306/304/308/354/356/358) ·················9-1
2. 基本インターフェイス接続図(SENTROL 303/353) ·················································9-2
3. DIO8基板 I/O信号一覧 ·······························································································9-3
4. DIO4基板 I/O 信号一覧 ·····························································································9-4
5. RIO1基板 I/O 信号一覧 ·····························································································9-5
6.そ の他の入出力信号 ···································································································9-6
7. NC用 DC24V電源の接続 ·······························································································9-6
8. 機械側I/O用 DC24V電源の接続 ·················································································9-7
9. MPGの接続 ·····················································································································9-7
10. USUの接続 ···················································································································9-8
11. RS232C INTERFACE ·····································································································9-8
12. LAN INTERFACE ···········································································································9-9
13. MAIN UNITと DKUの接続 ···························································································9-9
14. SERVO MOTOR/UNITの接続 ·······················································································9-10
14.1 YASKAWA SIGMA/Ⅱ/Ⅲ/Ⅴ SERIES AC SERVOの接続 ··································9-10
14.2 HIGEN AC SERVO(FDA-5000/6000/7000)の接続 ··········································9-11
14.3 PANASONIC MINAS A/A4/A5 SERIESの接続 ··················································9-12
14.4 MITSUBISHI MR-J2 SERIES AC SERVOの接続 ··············································9-13
14.5 MITSUBISHI MR-J3 SERIES AC SERVOの接続 ··············································9-14
14.6 AC SERVO UNITと AC 220V電源の接続 ························································9-15
15. SPINDLE MOTOR/UNITの接続 ·····················································································9-16
15.1 MITSUBISHI SPINDLE MDS-C1/B/A-SPA SERIESとの接続 ··························9-16
15.2 MITSUBISHI SPINDLE MDS-B/A-SPJA SERIESとの接続 ······························9-17
15.3 FUJI SPINDLE FRENIC 5000M3との接続 ····················································9-18
15.4 FUJI SPINDLE FRENIC 5000MS5との接続 ····················································9-18
15.5 POSITION CODERの接続 ················································································9-19
16. DNC機能 ·······················································································································9-20
16.1 DNCとは? ··········································································································9-20
16.2 DNC運転の準備 ······························································································9-20
1. 障害追跡方法
第 1 章 障害の追跡および処理
1. 障害の追跡方法
障害が発生する場合、現象により次のように区分されます。この項目を参考にして、適切な障
害の追跡をして下さい。
(1)画面にアラームメッセージが現れる場合
1)No.714 サーボアラームが発生した ······································第2章1.(2-7ページ)
2)スピンドルアラームが発生した ······················································第3章 (3-1ページ)
3)その他のNC関係のアラームが発生した ········································2.1 (1-2ページ)
(2)NCの機能および動作の異常
1)手動パルス発生器(MPG)で運転できない ······································4.(1-25ページ)
2)同期送り(ねじ切り)運転ができない ··················································4.(1-30ページ)
3)自動運転ができない ··············································································4.(1-31ページ)
4)原点復帰位置が正しくない ··································································4.(1-32ページ)
(3) 画面の異常
1)電源ONスイッチを押しても画面が出るこない ··································5.(1-36ページ)
2)画面が消えてしまう ··············································································5.(1-37ページ)
3)画面に筋がはいる ··················································································5.(1-37ページ)
(4)電源ONの異常 ·····························································································6.(1-38ページ)
(5)通信障害手 ··································································································5.(1-39ページ)
※当社にアフターサービスを要請するときは"第8章
3.アフターサービス要請時の確認事
項"(8-2ページ)を読んで連絡して下さい。ただし、No.1000~2999および番号表
示の無いアラームに対しては機械メーカにアフターサービスを要請して下さい。
連絡所:韓国
Tel 082-2-6299-5061~5064
Fax 082-2-6299-5002
1-1
第1章 障害の追跡および処理
2. アラームメッセージおよび処置
2.1 アラーム番号の区分
アラーム番号区分
アラーム内容
参 照
0~
(1) プログラムミス (P/Sアラーム)
1-3ページ~
250~
(2) ファイル管理アラーム
1-12ページ~
300~
(3) 通信アラーム (RS SEND/RECEIVE)
1-13ページ~
400~
(4) 温度、電源関連アラーム
1-15ページ~
500~
(5) オーバトラベルアラーム (OTアラーム)
1-16ページ~
550~
(6) 外部データ入力関連アラーム
1-17ページ~
580~
(7) リジットタッピング関連アラーム
1-18ページ~
600~
(8) リジットタッピング関連アラーム
1-19ページ~
700~
(9) サーボ関連アラーム
1-20ページ~
800~
(10) RAM運転関連アラーム
1-22ページ~
840~
(11) データ異常関連アラーム
1-22ページ~
9000~
(12) システムアラーム
1-23ページ~
1000~2999
*機械とシーケンス関係のアラーム
1-25ページ~
*機械操作に関するメッセージ
1-25ページ~
番号無表示
注)用語の説明
1)"L系"はSENTROL300-L(旋盤用)です。
2)"M系"はSENTROL300-M(マシニングセンタ、ミーリング用)です。
3)"L-プロ"は"SENTROL300-L 取扱い説明書のプログラミング説明編"です。
4)"M-プロ"は"SENTROL300-M 取扱い説明書のプログラミング説明編"です。
5)"L-操作"は"SENTROL300-L 取扱い説明書の操作説明編"です。
6)"M-操作"は"SENTROL300-M 取扱い説明書の操作説明編"です。
1-2
2. アラームメッセージ
2.2 アラームリスト
2.2 アラームリスト
1)プログラムミス (P/Sアラーム)
アラーム番号
001
002
003
004
005
006
メッセージ内容
参照内容
TOO MANY DIGITS OR OVERLIMIT
許容桁数を越えるデータが入力されています。
ILL USE OF NEGATIVE VALUE
符合"-"が許されないアドレスに指令されています。
ILL USE OF DECIMAL POINT
"L-プロ"第2章1.NCプログ
ラム概要
「基本アドレス指令値範囲」
"M-プロ"第2章1.プログラミ
ング実習
「基本アドレス指令値範囲」
小数点"."が許されないアドレスに指令されています。
IMPROPER G CODE
使用できないGコードが指令されています。
IMPROPER NC ADDRESS
使用できないアドレスが指令されています。
INVALID BREAK POINT OF WORD
NCワードの区切りに誤りがあります。
"L-プロ"第2章2.プログラミ
ングと機能
「SENTROL300-Lの準備機能一覧表」
"M-プロ"第2章6.プログラミ
ング実習
「SENTROL300-Mの準備機能表」
"L-プロ"第2章2.プログラミ
ングと機能
「WORD」
"M-プロ"第2章6.プログラミ
ング実習
「基本アドレスと指令範囲」
TOO MANY WORDS IN 1 BLOCK
009
1ブロック内のワード数が許容範囲(128文字)を越えていま
す。
ILL MODE GOTO / WHILE DO
011
MDIまたはテープモードのメインプログラムにGOTO文また
はWHILE-DO文があります。
"L-操作"第5章5.
「SENTROL300-Lのパラメータ一覧」
工具補正番号が大き過ぎます。(最大値はパラメータ6002"OD1 "M-操作"第5章5.
","OD2"で設定できます。
「SENTROL300-Mのパラメータ一覧」
TOO LARGE OFFSET NO.
012
013
ILL TOOL NO.
工具番号が許容範囲を越えています。
S CODE OUT OF RANGE
020
主軸モータの最大回転数(パラメータ5766番)を越える主軸速度が
指令されています。(リジットタッピングモード中)
SQ NO. NOT FOUND
021
シーケンス番号サーチにおいて指定されたシーケンス番号が見つ
かりません。GOTOn, M99 Pnで指令されたジャンプ先のシーケン
ス番号が見つかりません。
1-3
"L-プロ"第2章1.NCプログ
ラム概要
「基本アドレス指令値範囲」
"M-プロ"第2章1.プログラミ
ング実習
「基本アドレス指令値範囲」
第1章 障害の追跡および処理
アラーム番号
メッセージ内容
参照内容
NO P,Q COMMAND AT G70~G73
023
"L-プロ"第3章1.準備機能
複合型旋削用固定サイクルG70~G73のブロックにP,Qが指令され 「複合型固定サイクル(G70~G76)」
ていません
ILL COMMAND IN G70"`G76
024
複合型旋削用固定サイクルG70~G76ブロックの指令が正しくあり
ません。
L系だけ
P,Q BLOCK NOT FOUND
025
"L-プロ"第3章1.準備機能
複合型旋削用固定サイクルG70~G72ブロックで指令されたPまた 「複合型固定サイクル(G70~G76)」
はQのシーケンス番号のブロックが見つかりません。
L系だけ
ILL COMMAND IN P-BLOCK
026
"L-プロ"第3章1.準備機能
複合型旋削用固定サイクルG70,G71,G72のブロックで指令された 「複合型固定サイクル(G70~G76)」
Pのシーケンス番号のブロック指令が正しくありません。
L系だけ
ILL COMMAND IN PROG
027
G70~G72のP,Qで指令されたシーケンス番号間のブロックで
G00~G03以外のグループ01またはG04以外のワンショットGコー
ドまたはG65~G67, M98, M99が指令されています。
L系だけ
G70~G73 AT FORBIDDEN MODE
028
"L-プロ"第3章1.準備機能
複合型旋削用固定サイクルG70~G73がメモリーモード以外のモー 「固定サイクルに関するその他の注
意事項」
ドで指定されています。
L系だけ
ILL COMMAND IN Q-BLOCK
029
複合型旋削用固定サイクルG70~G73ブロックで指令されたQの
シーケンス番号のブロック指令で面取りあるいはコーナRが指令
されています。
L系だけ
PROG NOT FOUND
030
M98, G65, G66, G/M/Tコードにより指出されたプログラム番号の
プログラムが見つかりません。またはM99による戻り先のプログ
ラムが見つかりません。
L系だけ
PROG IN USE
031
032
バックグラウンドで編集中のプログラムがフォアグラウンドで実
行するために呼出されました。
NO RADIUS COMMAND IN G02 G03
円弧加工指令で円弧半径がありません。
カスタムマクロ
DOUPLICATE NC, MACRO STATEMENT
040
NC文とマクロ文が同一ブロックに指令されています。
カスタムマクロ
DOUPLICATE MACRO-CALL WORD
042
マクロ呼出し指令が同一ブロックに2回以上現れました。
カスタムマクロ
1-4
2. アラームメッセージ
2.2 アラームリスト
アラーム番号
メッセージ内容
参照内容
DOUPLICATE NC-WORD & M99
043
マクロモーダル呼出し状態(G66)でM99と同一ブロックにO,N,
P,L以外のアドレスが指令されています。
カスタムマクロ
USE G AS ARGUMENT
044
指令Gをマクロ引数として使用しています。
カスタムマクロ
"L-プロ"第3章1.準備機能
24.1)「G65によるマクロ呼出」
"M-プロ"第3章20.カスタム
マクロ20.1.1「単純呼出」
"L-プロ"第3章1.準備機能
24.1)「G65によるマクロ呼出」
カスタムマクロ引数指定Ⅱで11組以上の引数が指令されていま "M-プロ"第3章20.カスタム
マクロ「単純呼出」のロ.「引数指
す。
カスタムマクロ
定 Ⅱ」
TOO MANY TYPE-2 ARGUMENT
045
CANCEL WITHOUT MODAL CALL
046
マクロモーダル呼出しモード(G66)ではないのに呼出しモード
キャンセル(G67)が指令されています。
カスタムマクロ
ZERO DIVIDED
049
除数が0の割り算が指令されています。
カスタムマクロ
VARIABLE N0. OUT OF RANGE
050
使用できない変数番号が指令されています。
カスタムマクロ
WRITE PROTECT VARIABLE
051
式の右辺でしか使用できない変数を式の左辺で使用しています。
カスタムマクロ
READ PROTECT VARIABLE
052
式の左辺でしか使用できない変数を式の右辺で使用しています。
カスタムマクロ
TOO MANY BRACKET NESTING
053
括弧[ ]の多重度が許容範囲(5重)を越えています。
カスタムマクロ
ARUGMENT VALUE OUT OF RANGE
054
関数の引数が許容範囲(5重)を越えています。
カスタムマクロ
TOO MANY SUB, MACRO NESTING
055
サブプログラムの呼出しとマクロ呼出しの多重度の合計が許容範
囲(7重)を越えています。
カスタムマクロ
1-5
"L-プロ"第3章1.準備機能
24.5)マクロ本体の作成
④「変数の種類」
"M-プロ"第3章 準備機能
20.2.3「変数の種類」
第1章 障害の追跡および処理
アラーム番号
メッセージ内容
参照内容
TOO MANY MACRO NESTING
056
マクロ呼出しの多重度が許容範囲(4重)を越えています。
カスタムマクロ
MISSING END STATEMRNT
057
DO指令に対応するEND指令が見つかりません。
カスタムマクロ
MISSING DO STATEMRNT
058
END指令に対応するDO指令が見つかりません。
カスタムマクロ
ILL EXPRESSION FORMAT
059
式の記述に誤りがあります。
カスタムマクロ
ILL LOOP NO.
060
DO,END番号が許容範囲(1~3)を越えています。
カスタムマクロ
TOO LONG MACRO SENTENCE
061
マクロ文が長すぎます。
カスタムマクロ
SQ NO. OUT OF RANGE
070
シーケンス番号が1~99999以外の値になっています。
カスタムマクロ
MISSING OPEN BRACKET
071
括弧"["の個数が括弧"]"の個数より少ないです。
カスタムマクロ
MISSING CLOSE BRACKET
072
括弧"]"の個数が括弧"["の個数より少ないです。
カスタムマクロ
MISSING
073
"="
"="指令が抜けています。
カスタムマクロ
MISSING
074
"/"
"/"指令が抜けています。
カスタムマクロ
MACRO STATEMENT FOTMAT ERROR
075
マクロ文のフォーマットに誤りがあります。
カスタムマクロ
1-6
2. アラームメッセージ
2.2 アラームリスト
アラーム番号
メッセージ内容
参照内容
IF STATEMENT FORMAT ERROR
077
マクロのIF文フォーマットに誤りがあります。
カスタムマクロ
WHILE STATEMENT FORMAT ERROR
078
マクロのWHILE文フォーマットに誤りがあります。
カスタムマクロ
090
G10 FORMAT ERROR
"M-プロ"第3章
3.データ設定(G10)
G10のフォーマットに誤りがあります。
ZERO RETURN NOT FINISHED
101
103
電源投入後、リファレンス点復帰を一度も行われていない軸の移
動指令がされました(G27, G29, G30, G53)
G02,G03の場合プログラムの修正が
必要、G90,G94の場合、パラメータ
1034番が同じ値のときアラームが発
生します。それぞれ異なる値に修正
が必要です。
TOO MANY SIMULTANEOUS CONTROL AXES
同時制御可能な軸数よりも多い移動指令がされました。
G27 ERROR
105
G27(リファレンス点復帰チェック)で指令された軸がリファレン
ス点に戻っていません。
ILL PLANE SELECT
106
107
109
平面選択指令に誤りがあります。(平行軸を同時に指令している
とかパラメータ1031, 1032, 2401<G18>が間違って設定されてい
ます。)
FEED ZERO (COMMAND)
切削送り速度の指令(Fコード)が"0"になっています。
RPR IN TOOL OFFSET
工具補正中に原点復帰をしようとしました(G28, G29)
OVER TOLERANCE OF RADIUS
110
始点と終点での半径値差がパラメ-タ設定値より大きい円弧が指
令されました。(パラメ-タ2410番)
ILL LEAD COMMAND
111
可変リ-ドねじ切りにおいて、アドレスKで与えられたリ-ドの
増減値が最大指令値を越ているか、リ-ドが負の値または最大リ
-ドを越えるような指令をしています。
L系だけ
112
ILL AXIS SELECTED
パラメ-タ5640の値に誤りがあります。
ILL DRILLING AXIS SELECT
113
"M-プロ"第3章19.穴あけ加工サ
穴あけ用固定サイクルの穴あけ軸の選択が正しく指令されていま イクル <固定サイクル一覧表>
せん。
M系だけ
1-7
第1章 障害の追跡および処理
アラーム番号
114
115
116
117
メッセージ内容
参照内容
ILLEGAL USE OF G12.1 / G13.1
極座標補間開始またはキャンセル時の条件が正しくありません。
ILLEGAL USE OF G-CODE
G12.1モード中に指令できないGコードを指令しました。
ILLEGAL G07.1 AXIS
円筒補間のモード中に指令できない軸を指令しました。
ILLEGAL G-CODE USE (G07.1 MODE)
円筒補間のモード中に指令できないGコードを指令しました。
LEAD *S OUT OF RANGE
118
回転送りの送り速度が最大値を超えました。
(最大値はパラメータ1422番の値)
RPR ERROR
120
ディジタル形位置検出器を用いたグリッド方式のリファレンス点 保守説明書 第1章 4. 4) 原点復
復帰で、減速用ドッグがオンの間に1回転信号がこなかったため 帰の位置が食い違う
に、グリッド位置を求めることができませんでした。
OFFSET C START UP CANCEL BY CIR
121
"L-プロ" 第3章 1. 準備機能<刃
刃先R補正(工具径補正)のスタ-トアップ又はキャンセルが行 先補正機能>
われようとしています
OFFSET C ILL PLANE
122
123
124
125
刃先R補正(工具径)中に平面が切り替えられようとしていま
す。
OFFSET C INTERFERENCE
刃先R補正(工具径)において切り込み過ぎを生じています。
OFFSET C NO SOLUTION
刃先R補正(工具径補正)の交点がありません。
ILL COMMAND G45"`G48 IN OFFSET C
工具径補正中にG45~G48を指令しています。
M系だけ
ILL COMMAND IN G41, G42
126
刃先R補正においてスタ-トアップ、キャンセル、G41/G42切煥
えと共に面取り,コ-ナRを指令しています。または、面取り,コ
-ナRで切り込み過ぎを生じるおそれがあります。
1-8
"L-プロ" 第3章 1. 準備機能<刃
先補正機能>
2. アラームメッセージ
2.2 アラームリスト
アラーム番号
メッセージ内容
ILL ADDRESS
130
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
使用できないアドレスが指令されました。
MISSING ADRESS
131
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
アドレスが指令されていません。
ILL DATA NUMBER
132
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
デ-タ番号の指令に誤りがあります。
ILL AXIS NUMBER
133
パラメ-タのテ-プからの登録で、軸番号の指定に誤りがありま
す。
TOO MANY DIGITS
134
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
デ-タの桁数が許容値を越えています。
DATA OUT OF RANGE
135
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
デ-タの値が許容値を越えています。
MISSING AXIS NUMBER
136
軸指定に必要なパラメ-タのテ-プからの登録、軸番号が指定さ
れていません。
ILL USE OF MINUS SIGN
137
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
デ-タの符合の使い方に誤りがあります。
MISSING DATA
138
パラメ-タまたはピッチ誤差補正デ-タのテ-プからの登録で、
アドレスの次に数値が指令されていません。
PROG. NOT MATCH
140
テ-プ上のプログラムとメモリ内のプログラムの照合がとれませ
ん。
G37 IMPRPER AXIS COMMAND
141
142
143
工具測定指令ブロックにおいて軸が指定されていません。あるい
は2軸以上指定しています。
G37 SPECIFIED WITH T-CODE
Tコ-ドが工具測定指令と同一ブロックにあります。
G37 OFFSET NO. UNASSIGNED
工具測定指令の前にTコ-ドが指令されていません。
G37 ARRIVAL SGNL NOT ASSERTED
144
工具測定指令において、パラメ-タεで指令された領域の手前で
測定位置到達信号が「ON」になりました。あるいは、最後まで
「ON」になりませんでした。
1-9
参照内容
第1章 障害の追跡および処理
アラーム番号
メッセージ内容
参照内容
TOO MANY ADDRESS
150
面取り/コ-ナRを指令したブロック中に I,(J),K,R が2つ
以上指令されています。
L系だけ
NOT ONE AXIS MOVE WITH I ~ R
151
面取り/コ-ナRを指令したブロックが1軸のみの移動指令であり
ません。
L系だけ
MISMATCH AXIS WITH I ~ R
152
153
面取り/コ-ナRを指令したブロックでX軸(Z軸)指令に、I(J
)を指令しました
L系だけ
MISSING VALUE AT I ~ R
面取り/コ-ナRを指令したブロックで移動量が、面取り/
コ-ナRの量よりも少なく指令されています。
L系だけ
NOT G01 AFTER I ~ R
154
面取り/コ-ナRを指令したブロックの次の指令がG01ではありま
せん。
L系だけ
"L-プロ" 第3章 1. 準備機能<自動
面取りおよびコーナR>
MISSING MOVE AFTER I ~ R
155
面取り/コ-ナRを指令したブロックの次のブロックの指令方向
又は移動量が適切でありません。
L系だけ
ILL FORMAT IN FREE CHAMFERING
158
159
160
任意角度の面取り,コ-ナRで指令フォ-マットが違っています
。
1),Cと Rを同じブロックで使用。
2),C(,R)と同じブロックでC,Rを使用。
3),C(,R)とI,J,Kを同時に使用。
4),後ろにC,R 以外の文字がある。
MISSING VALUE ATR(FRCHMF)
挿入する円の半径値が大きすぎて二つの直線に接しません。
ILL LIFE GROUP NO.
工具グル-プ番号が許される最大値を越えています。
NOT FOUND GROUP AT LIFE DATA
161
162
加工プログラムの中で指令された工具グル-プの設定がされてい
ません。
OVER MAX TOOL TIMES
1グル-プ内の工具本数が登録可能な最大値を越えています。
NOT FOUND T COMMAND
163
工具グル-プを設定するプログラム内にTコマンドがありませ
ん。
1-10
2. アラームメッセージ
2.2 アラームリスト
アラーム番号
メッセージ内容
参照内容
NOT USE TOOL IN LIFE GROUP
164
グル-プに属する工具が使用されてない時にH99コマンドかDコ
マンドが指令されています。
ILL T COMMAND AT M06
165
加工プログラムの中でM06コマンドの後のTコマンド(戻り工具グ
ル-プ)が現在使用中の工具グル-プと一致しません。
M系だけ
NOT FOUND P, L COMMAND
166
工具グル-プを設定するプログラムの先頭にPコマンドまたはL
コマンドがありません。
M系だけ
OVER MAX LIFE GROUP TIMES
167
設定しようとする工具グル-プの数が許されるされる最大値を越
えています。
ILL L COMMAND
168
工具グル-プを設定するプログラムの中でLコマンドが"0"ま
たは寿命最大値を越えています。
ILL H D T COMMAND
169
170
工具グル-プを設定するプログラムの中でH,D,Tコマンドの中
に最大値を越えているものがあります。
ILL TYPE OF TOOL CHANGE
工具交換方式の設定が誤っています。
ILL FORMAT AT LIFE DATA
171
工具グル-プを設定するプログラムの中に許容されないコマンド
が指令されています。
NOT TOOL LIFE DATA
172
工具グル-プが一つも設定されていないのに,加工プログラムで
工具グル-プの指令がされました。
SPINDLE OTHER AXIS MOVE
175
主軸位置決め指令と同じブロック内に他の軸の移動指令がありま
す。
SPINDLE NOT ZERO RETURN
176
180
190
主軸オリエンテーション(リファレンス点復帰)をせずに主軸位置
決め指令を行いました。
G68 FORMAT ERROR
G68で絶対値指令を1軸だけしました。
DUPLICATE COMMAND NC & PLC
PLC制御軸指令とNC指令が同時に軸に指令されています。
OTHER AXIS ARE COMMANDED
197
絶対値で指令するときは2軸でしま
す。
使用するNCに有効なオプション機能
インデックステ-ブルのインデックス軸と同時に他の制御軸が指 を確認します。
令されました。
1-11
第1章 障害の追跡および処理
アラーム番号
メッセージ内容
参照内容
NO OPTION
200
201
使用するNCに有効なオプション機能
現在使用しているNCに入っていないオプション機能を使用しよう を確認します。
としました。
MACHINE POINT
COMMAND
FINISHHED.(PLC AXIS MOVING)
RECIVED
BEFORE
RRP,
原点復帰終了前に機械座標指令を受け取りました(PLC軸移動)
202
ABSOLUTE POINT COMMAND RECIVED IN MANUAL ABS, OFF
MODE.(PLC AXIS MOVING)
MANUAL ABSOLUTE
(PLC軸移動)
OFF状態で、絶対座標指令を受け取りました
2)ファイル管理アラーム
アラーム番号
250
メッセージ内容
NO PROGRAM LOAD ERROR
プログラムLOADING エラー
252
253
254
ALARM HISTORY FILE OPEN EOOR
255
256
260
PLC DATA WRITE ERROR (DATA TABLE)
1-12
参照内容
2. アラームメッセージ
2.2 アラームリスト
3)通信アラーム (SR SEND/RECEIVEアラーム)
アラーム番号
メッセージ内容
TH ERROR
300
301
参照内容
ボーレイトを小さくします。ケ─ブ
TH アラ-ム (有意情報区間にパリティの合っていない文字が ルのアース、シールド、ツイストな
指令されています。)
どを確認します。
TV ERROR
TV アラ-ム (1ブロックの文字の数が奇数個になっています。)
同上.
奇数になっていなければパラメータ
0番 <TCV>=0にします。
END OF RECORD
302
303
ブロック途中に EOR(エンドオブレコード)コ-ドが指令されてい
ます。
PARAMETER OF RESTART ERROR
プログラム再開用パラメータの設定に誤りがあります。
DUPLICATE PROG.
304
パラメータ 2200番 <REP>=1"L,M-
すでに登録されているプログラムと同じプログラム番号のプログ プロ" 第3章 5. <プログラムの外
ラムを登録しようとしました。(PARAMETER 2200 REP(bit)=0 の 部入力>
場合)
NO. O,N HEAD IN OPERATION
305
受信されたプログラムに番号がない
プログラムの先頭にアドレスOまたはNがありません。(プログ とき入力および番号変更キーを選択
してプログラム番号を入力します。
ラムの先頭にプログラム番号が必要です。)
PROGRAM IN OPERATION
306
外部I/O機器からのテープ入力で運転中のプログラムと同じ番号 プログラムに番号変更
のプログラムを入力しようとしました。
PARAMETER SET ERROR
312
オプションで選択されていない入出力インタ-フェイスが指令さ
れています。または、入出力インタ-フェイス関係セッティング
/パラメ-タの設定値が正しくありません。
RX TIME OUT (RS232C1)
331
相手機器をDCコード制御(XON/XOFF)
RS232Cインタ-フェイス1で受信タイムアウトになりました。(通 方式にします。
信中にデ-タが5秒間はいってきません)
OVERRUN ERROR (RS232C1)
332
RS232Cインタ-フェイス1で受信された文字を読み取る前に、次 ボーレイトを小さくします。
の文字が受信されました。
FRAMING ERROR (RS232C1)
333
ボーレイトとストップビットを外部
RS232Cインタ-フェイス1で受信された文字のストップビットが 機器と同じにします。
検出されませんでした。
1-13
第1章 障害の追跡および処理
アラーム番号
メッセージ内容
参照内容
BUF OVERFLOW (RS232C1)
334
RS232C インタ-フェイス1でNC側がデ-タ受信時、ストップコ- 相手機器をDCコード制御(XON/XOFF)
ド(DC3)を送信したのに、10キャラクタを越えるデ-タが受信さ 方式にします。
れました。
RX TIME OUT (RS232C2)
336
相手機器をDCコード制御(XON/XOFF)
インタ-フェイス 2で受信タイムアウトになりました。(通信中 方式にします。
にデータが5秒間はいってきません)
OVERRUN ERROR (RS232C2)
337
338
RS232Cインタ-フェイス2で受信された文字を読み取る前に、
次の文字が受信されました。
ボーレイトを小さくします。
FRAMING ERROR (RS232C2)
ボーレイトとストップビットを外部
RS232Cインタ-フェイス2で受信された文字のストップビットが 機器と同じにします。
検出されませんでした。
BUF OVERFLOW (RS232C2)
339
RS232Cインタ-フェイス2でNC側がデ-タ受信時、ストップコ- 相手機器をDCコード制御(XON/XOFF)
ド(DC3)を送信したのに、10キャラクタを越えるデ-タが受信さ 方式にします。
れました。
CANNOT RESTART BEFORE RPR
341
電源投入後または非常停止解除後、リファレンス点復帰していな
いままプログラム再開を指令し、サ-チ中にG28が見つかりまし
た。
1-14
2. アラームメッセージ
2.2 アラームリスト
4)温度、電源関係アラーム
アラーム番号
400
401
402
403
メッセージ内容
OVER HEAT
サ-ボモ-タが過熱しました。
THERMAL SENSOR ALARM
ボ-ド上の温度センサが70℃以上になりました。
24V DOWN
本説明書 1-21ページ参照
24V電源電圧確認
4-5ページ参照
24V電圧が低下しています。
15V DOWN
15V電源電圧確認
4-5ページ参照
15V電圧が低下しています。
POWER MUST BE OFF
420
参照内容
電源をいったんオフしてまたオンし
電源を一旦おとさなければならないパラメ-タが設定されまし ます。
た。
1-15
第1章 障害の追跡および処理
5)オーバトラベルアラーム
アラーム番号
メッセージ内容
参照内容
+OVERTRAVEL (SOFT 1)
500
解除キーを押してー方向に移動させ
+方向移動中にストアードストロークリミット1の禁止領域に入 ます。
本説明書 1-21ページ参照
りました。
-OVERTRAVEL (SOFT 1)
501
解除キーを押して+方向に移動させ
-方向移動中にストアードストロークリミット1の禁止領域に入 ます。
本説明書 1-21ページ参照
りました。
+OVERTRAVEL (SOFT 2)
502
+方向移動中にストアードストロークリミット2の禁止領域に入
りました。
-OVERTRAVEL (SOFT 2)
503
-方向移動中にストアードストロークリミット2の禁止領域に入
りました。
本説明書 1-21ページ参照
+OVERTRAVEL (SOFT 3)
504
+方向移動中にストアードストロークリミット3の禁止領域に入
りました。
L系だけ
-OVERTRAVEL (SOFT 3)
505
-方向移動中にストアードストロークリミット3の禁止領域に入
りました。
L系だけ
506
507
510
536
+OVERTRAVEL (HARD)
+側のストロークリミットスイッチを踏みました。
-OVERTRAVEL (HARD)
-側のストロークリミットスイッチを踏みました。
DTERGET POINT IS IN
PROFIBIT EREA (PLC AXIS MOVING)
指定位置が禁止区域内にあります。
DISCONNECTION POS. CODER
スピンドル用ポジションコ-ダの断線が検出されました。
1-16
ミーリングでポジションコ-ダを使
用しない 場合、パ ラメータ 5603番
PDC=1にします。
2. アラームメッセージ
2.2 アラームリスト
6)外部データ入力関連アラーム
アラーム番号
メッセージ内容
SERCH REQUEST NOT ACCEPTED
550
プログラム番号、シ-ケンス番号のサーチ要求が受けつけられな
い状態です (メモリモードでない。またはリセット状態でないた
め)。
SECIFIED NUMBER NOT FOUND
551
ワークナンバーサーチで指定されたプログラム番号がありませ
ん。
UNASSIGEND ADDRESS (HIGH)
552
外部データ入出力インターフェースのアドレス信号の上位4ビッ
ト(EAI4-EAI7)に定義されていないアドレス(小区分)が指定され
ました。
UNASSIGEND ADDRESS (LOW)
553
外部データ入出力インターフェースのアドレス信号の下位4ビッ
ト(EAI0-EAI3)に定義されていないアドレス(小区分)が指定され
ました。
OUTPUT REQUEST ERROR
556
外部データ出力中に再び出力要求がされました。または、出力
データのないアドレスに対して出力要求がされました。
SPECIFIED NUMBER NOT FOUND
558
外部データ入力のプログラム番号、シーケンス番号サーチで指定
された番号がありません。または、ワークナンバーサーチで指定
されたプログラム番号がありません。
DI. EIDHW OUT OF RANGE
559
外部データ入力用データ信号
許容範囲をこえています。
EID32~EID47で入力された数値が
DI. EIDLL OUT OF RANGE
560
外部データ入力用データ信号 EID0~EID31で入力された数値が許
容範囲をこえています。
1-17
参照内容
第1章 障害の追跡および処理
7)リジッドタップ関連アラーム
アラーム番号
メッセージ内容
SPINDLE EXCESS ERROR (STOP)
580
主軸サーボ停止中に位置偏差量の限界値を越えました(パラメー
タ5752番)。
SPINDLE EXCESS ERROR (STOP)
581
主軸サーボ停止中に位置偏差量の限界値を越えました(パラメー
タ5754番)
RIGID TAPPING MODE G42.2 OFF
582
M29が指令されているけれどもG84(G74)ブロック実行時 リジッド
モ-ドDI信号(G42.2)がオフになっています。
ILLEGAL USE M29 OR S
583
リジッドタップでリジッドMコ-ド(M29)あるいはSコマンドの指
令位置を間違っています。
ILLEGAL MOVE COMMAND IN RIGID TAPPING
584
リジッドMコ-ド(M28)とG84(G74)の間に軸の移動指令がされま
した。
1-18
参照内容
2. アラームメッセージ
2.2 アラームリスト
8) ハードウェア設定関連アラーム
アラーム番号
601
602
603
604
605
606
607
608
609
610
メッセージ内容
RIO1_1 SETTING ERROR PARAMETER 9011 R11
RIO1_1
設定エラー → パラメータ9011番 R11
RIO1_2 SETTING ERROR PARAMETER 9011 R12
RIO1_2
設定エラー → パラメータ9011番 R12
RIO2_1 SETTING ERROR PARAMETER 9012 R21
RIO2_1
設定エラー → パラメータ9011番 R21
RIO2_2 SETTING ERROR PARAMETER 9012 R22
RIO2_2
設定エラー → パラメータ9011番 R22
RIO2_3 SETTING ERROR PARAMETER 9012 R23
RIO2_3
設定エラー → パラメータ9011番 R23
RIO2_4 SETTING ERROR PARAMETER 9012 R24
RIO2_4
設定エラー → パラメータ9011番 R24
RIO2_5 SETTING ERROR PARAMETER 9012 R25
RIO2_5
設定エラー → パラメータ9011番 R25
RIO2_6 SETTING ERROR PARAMETER 9012 R26
RIO2_6
設定エラー → パラメータ9011番 R26
RIO2_7 SETTING ERROR PARAMETER 9012 R27
RIO2_7
設定エラー → パラメータ9011番 R27
RIO2_8 SETTING ERROR PARAMETER 9012 R28
RIO2_8
設定エラー → パラメータ9011番 R28
SET 1800 PARAMETER WITHOUT EPS BOARD 1 (AXIS 1〜4)
621
EPS BOARD 1 が無い状態で(1〜4軸)のパラメータ1800番を設定し
た。
622
EPS BOARD 2 が無い状態で(5〜8軸)のパラメータ1800番を設定し
た。
623
EPS BOARD 3 が無い状態で(9〜12軸)のパラメータ1800番を設定
した。
SET 1800 PARAMETER WITHOUT EPS BOARD 2 (AXIS 5〜8)
SET 1800 PARAMETER WITHOUT EPS BOARD 3 (AXIS 9〜12)
SET 1800 PARAMETER WITHOUT EPS BOARD 4 (AXIS 13〜16)
624
650
EPS BOARD 4 が無い状態で(13〜16軸)のパラメータ1800番を設定
した。
NO ROTARY AXIS
回転軸がありません。
1-19
参照内容
第1章 障害の追跡および処理
9)サーボ関連アラーム
アラーム番号
メッセージ内容
(軸名称) EXCESS ERROR (STOP)
707
停止中の位置偏差量がパラメ-タの設定値より過大です。
(パラメ-タ1804番)
(軸名称) EXCESS ERROR (MOVING)
708
移動中の位置偏差量がパラメ-タの設定値より過大です。
(パラメ-タ1805番)
参照内容
本説明書 第2章 サーボ
2-3ページ参照
機械が衝突したとか負荷を受けたと
きに発生し、電源を切って投
入しても解除されません。
(解除方法)
パラメータ1823番 <ADF> 1→0
(エラーが発生した軸だけ)
パラメータ1822番 DRAFT AMAUNT→0
(エラーが発生した軸だけ)
に設定した後に電源を切って投入す
ると解除されます。
解除後,パラメータ1823番 <ADF> 0
→1 に設定します。
サーボゼロ調整をもう一度行い
ます。
ドリフト量がより過大です。(パラメ-タ1632番 VELOを越えまし 詳しい方法は本説明書 第4章
設定および調整 5.サーボ調整方法
た)
4-8ページを参照
(軸名称) DRIFT OVER
709
(軸名称) READY OFF ERROR
712
713
714
本説明書 第2章 サーボ
位置制御のレディ信号(PRDY)がオンであるのに、速度制御のレ 2-6 ページを参照
ディ信号(VRDY)がオフになりました。
(軸名称) READY OFF ERROR
本説明書 第2章 サーボ
位置制御のレディ信号(PRDY)がオフであるのに、速度制御のレ 2-7 ページを参照
ディ信号(VRDY)がオンになりました。
(軸名称) ENCODER DISCONNECT
エンコーダの断線が検出されました。
(軸名称) EXCESS ERROR (SERVO OFF)
715
724
725
726
本説明書 第2章 サーボ
2-7 ページを参照
本説明書 第2章 サーボ
サーボオフ時の位置偏差量が大きすぎます。(パラメータ1806番 2-8 ページを参照
で指定した値以上)
EMERGENCY BUTTON ON
非常停止がかかっています
EMERGENCY L/S ON
非常停止リミットスイッチがオンになりました
EMERGENCY STOP BY PLC
PLCにより非常停止になりました。
1-20
2. アラームメッセージ
2.2 アラームリスト
アラーム番号
メッセージ内容
参照内容
(軸名称) PULSE COUNT MISS (ENC)
730
パルスカウントに異常が検出されました。(モータエンコーダ)
本説明書 第2章 サーボ
2-8ページ参照
(軸名称) UNFIT ENCODER 1REV. ON (ENC)
732
734
735
1回転当り発生パルス量に異常が検出されました。(モータエン 本説明書 第2章 サーボ
2-9ページ参照
コーダ)
(軸名称) AUTO GAIN OVER
自動ゲイン補正で補正量が補正限度を越えました。
(軸名称) NO F/B PULSE
エンコーダフィードバックパルスがありません。
(軸名称) SERVO ALARM
736
750
751
752
本説明書 第2章 サーボ
2-9ページ参照
機械の後ろにある強電盤内のサーボ
軸制御用サーボユニットでアラームが発生しました。(AC
M SERIES)
EXCESS SYNC POSITION ERROR DIFF
同期運転時の位置偏差量の差が大き過ぎます。
EXCESS SYNC TORQUE DIFF
同期運転時のトルクの差が大き過ぎます。
EXCESS ERROR (DUAL POSITION FEEDBACK)
DUAL POSITION FEEDBACKの位置偏差量が大き過ぎます。
1-21
SERVO ユニットのLEDにどの番号が表示さ
れているのかを確認。
第1章 障害の追跡および処理
10)RAM運転関連アラーム
アラーム番号
メッセージ内容
800
シーケンスROMプログラムがありません。
801
シーケンスRAMプログラムがありません。
803
シーケンスを受信中にチェックエラーが発生しました。
参照内容
11)DATA異常関連アラーム
アラーム番号
メッセージ内容
840
パラメータRAM バックアップ電池の電圧が低くなりました。
841
NCプログラムの部分にチェックサムエラーがあります。
842
パラメータにチェックサムエラーがあります。
843
ピッチデータにチェックサムエラーがあります。
844
オフセットデータにチェックサムエラーがあります。
845
カスタムマクロのコモン変数にチェックサムエラーがあります。
846
PLCの不揮発性データにチェックサムエラーがあります。
1-22
参照内容
2. アラームメッセージ
2.2 アラームリスト
12)システムアラーム
アラーム
番号
メッセージの内容
10008
実行中のサブプログラムを編集しようとした。
10013
HMIで送ったプログラム要求に対する応答が遅すぎます。
10014
プログラムファイルの読込みに失敗しました。
10033
法線制御パラメータが異常です。
10071
RIO1 DATAが異常です。
13000
バックグラウンド処理が止まりました。
14004
1ms のインタラプトが取消しになりました。
15012
受信データの保存に失敗しました。
15013
受信データの保存に失敗しました。 / バックアップRAMのチェックサムが異常です。
15014
受信データの保存に失敗しました。
15020
LAN情報のファイルが無いので新しく作成しました。
15021
LAN情報のファイルのオープンに失敗しました。
15022
LAN情報のファイルの保存に失敗しました。
15211
LAN受信 オーバライトエラー。
15215
オーバフロー受信エラー。
15237
IPアドレスを自動取得しようとしました。
15247
IPアドレス が衝突しています。
17100
アブソリュートエンコーダ以外の通信でタイムアウトエラーが起りました
17101
アブソリュートエンコーダ以外の通信用ポートのオープンを失敗しました。
17120
|
17135
アラーム番号 = 17120+N-1
第N軸のアブソリュートエンコーダの受信した位置データが異常です。
PANASONICの場合、SERVO UNITのモジュールID(RSW)が設定されているのかの確認が必要
です。
17140
|
17155
アラーム番号 = 17140+N-1
第N軸のアブソリュートエンコーダの受信した位置データが異常です。/
PANASONICの場合、パラメータ(OB='O')確認が必要です。
17160
|
17175
アラーム番号 = 17160+N-1
第N軸のアブソリュートエンコーダのバッテリーの警告(3.2V以下)が発生、またはバッ
テリーダウンが発生(Panasonic)。 /
受信した位置データが異常です(YASKAWA)。
18100
アラームヒストリー(NC)ファイルのオープンエラー。
18101
アラームヒストリー(Key)ファイルのオープンエラー。
20500
Co-Processorのレジスタの状態が異常。
20503
Co-Processorのレジスタの状態が異常。
20608
Co-Processorのレジスタの状態が異常。
30036
システムカウンターの書き込みを失敗。
1-23
第1章 障害の追跡および処理
2.3 "500~505 STORED STROKE LIMIT ALARM"に対する詳細説明
機械が“STORED
STROKE
LIMIT”に到達したときに画面の上にメッセージが表示されま
す。
このアラームが発生したとき、自動の場合は全体の軸は送りを停止します。手動の場合
はアラームになった軸の送りだけ停止します。
(対処)
(1)プログラムの修正
(2)STORED STROKE LIMITを正しく設定する。
(解除方法)
(a)機械は移動してきた方向とは逆の方向にだけ移動できます。
(b)禁止区域から抜けられない時は、非常停止ボタンを押してアラームを解除し、
G23(STORED STROKE LIMIT 機能 OFF)をMDIで入力して機械をJOG送りで移
動させます。
1-24
2.アラームメッセージ
2.4 1000~2099 シーケンス関連アラーム
2.4 "1000~2099 シーケンス関連アラームおよび無番号アラーム"に対する説明
NC機械では軸をある位置に動かし、切削加工する軸の制御をするだけではなくてワー
クを固定し、スピンドルを回し、潤滑油を供給するなどの機械構造によりいろいろな制御
が必要です。このような機械動作に関する異常発生の警告などを知らせるのがこのアラー
ムです。
機械ごとに機械構造が異なるので発生するアラーム内容と番号は機械によって異なるの
がふつうで、詳しいことは機械の取扱い説明書を参照するとか機械メーカに問い合わせて
下さい。ここではアラームが発生時に共通的に使用する解除方法を説明します。
(解除方法)
1000~2099番シーケンス関連アラームとか番号無表示アラーム発生時にはまず
どこでアラームが発生しているのかを探します。
(a)
検索番地=
の順に入力すると、下の
図のように表示されます。
A000~A024まで表示さ
れますが"1"で表示される所
でアラームが発生しています。
ここでは、A000.1でア
ラームが発生していることを示
しています。
(b) 次に
の状態で
を選択し
SYMBOL/ADRESS(R):
の順に入力すると、例えば下のように表示
されます。
ここで①部分が条件部で②部分が結果になります。
①部分にアラームの原因があるので①部分の内容を見てその原因を取り除きます。
1-25
第1章 障害の追跡および処理
3. アラームヒストリーの機能および操作
3.1 機能
過去に発生した120個のアラームと入力された400個のキーを記憶します。
アラームが発生したときの運転モードプログラム番号(自動運転時間)とアラーム発生
時間(月、日、時、分)を記憶します。そして電源オン時の時間(月、日、時、分)も記
憶します。
3.2 画面の説明
(1)"診断"の"アラーム"メニューを選択します。
⇧
⇧
⇧2度
⇧
(2)アラームが発生したときのアラーム番号、軸、運転モード、プログラム番号、時間、
アラーム説明の順序に表示されます。
1-26
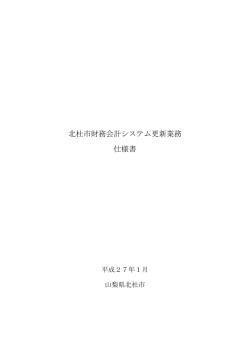
3. アラームヒストリーの機能および操作
3.1 機能
図1-24-1 アラーム表示
(3)
キーを押すとP/Sアラーム(1-3ぺ─ジ参照)が、もう一度押すとP/Sアラーム以
外のアラームが表示されます。
(4)
キーを押すと図1-24-2のように選択したアラームに対する入力したキーが
ミニウィンドウに表示されます(キーヒストリー)。この時、表示するキーは時間順に
図1-24-2 アラーム表示
表示されます。図1-24-1
1-27
第1章 障害の追跡および処理
(5)図1-24-2で
を押すと図1-24-1の画面に戻ります。
を押すとPLC画面に戻ります。
を押すとミニウィンドウ内の表示が上下します。
でキーヒストリーを見るアラームを選択します。
(6)図1-24-1で
を選択すると次のように表示され、探したいアラームの番号を
入力するとそのアラーム番号から表示されます。
アラーム番号 =
■
もし、探したいアラームが無ければ次のメッセージが表示されます。
指定された番号がありません
3.3 記号の説明
(1)モード
(2)キー
表示
表示
内 容
内 容
_
キー
操作
キー
手動運転
;
キー
AUTO
自動運転
BS
キー
EDIT
編集
取消
キー
原点復帰
解除
キー
電源オン後5秒以内
開始
キー
DNC運転
停止
キー
画面
キー
F1~F8
F1~F8 キー
選択
キー
MPG
ハンドル運転
MDI
MDI(半自動)運転
JOG
REF
PWON
DNC
PWON
ENT
1-28
電源オン
キー
4. NCの機能および動作異常
4. NCの機能および動作異常
(1)手動パルス発生器で運転できない
項
障 害 要 因
確 認 方 法
処 置
1.位置表示は動くのだけれども機械が動
かない
2項に
2.位置表示も機械も動かない
1
障害分析
2
マシンロックMLKがオン
操作盤を確認します。
になってる
3
サーボオフ信号がオン PLC診断を確認します。
になっている
G64.6, G84.6, G74.6を確認します。
4
サーボ系の異常
ITX,ITY,ITZを確認します。
5項に
ITX G64.6
ITY G74.6
ITZ G84.6
5
インタロック信号
6
モード信号が入力され 画面の状態表示に「ハンドル」が表示され
PLC診断 F3.1
ない
ているのかを確認します。
7
送り軸方向の信号が入 ハンドル画面で軸の選択信号が入力されて
力されていなかった
要ることを確認します。
8
手動パルス発生器(MP 診断(一般)画面で MPA, MPB(11/11ページ
G)の不良
No.18)の内容が変化することを確認しま
ケーブルの不良
す。
9
プリント基板にある赤
いLEDが点灯する
電源をオフしてまた
オンします。頻繁に
発生するならば当社
に連絡
1-29
第1章 障害の追跡および処理
(2)同期送り(ねじ切り)運転ができない
項
障 害 要 因
確 認 方 法
処 置
1
スピンドル回転数を確
送り速度画面を見て確認
認
2
ケーブルの接触ミス
3
診断(一般)画面でSPINDLE POSITION CODER
ポジションコーダの不
ポジションコーダを
(10/11ページ No.15)の内容が変化すること
良
交換します。
を確認します。
4
ポジションコーダゼロ信号がくると、その
とき位置とスピンドルチェックを高速回転 ポジションコーダの
後、位置が同じなのかを確認します。
タイミングベルトな
(一般診断11/11ページ No.20 PCZ が1なの どを確認
か?)
ポジションコーダ
の回転不良
NCとポジションコーダとの接触を確認し
ます。
1-30
4. NCの機能および動作異常
(3)自動運転ができない
項
障 害 要 因
確 認 方 法
処 置
自動モードで起動ボタンをオン・オフして
みます。
1
障害分析
1.STL LAMPが点灯しません。
2.STL LAMPが点灯しますが、軸が動きま
せん。
2
モード信号が入力され 画面状態表示で「自動」が表示されている
ない
のかを確認します。 3
スタート信号が入力さ PLC診断でST信号(G5.0)を確認しま
れない
す。
4
自動運転休止信号
(*SP)
5
リセット信号が入力さ
れない
6
1.オーバライドが
0%
2.スタートロックお
よびインタロック
がオン
3.インポジション
チェックを実行す
る
4.回転当り送りで主
軸回転待機
5.主軸速度到達信号
待機
PLC診断でST信号(G5.0)を確認しま
す。
速度画面確認
0.0ビットINP=0の場合
主軸速度画面で確認します。
F44.7
1-31
2項に
第1章 障害の追跡および処理
(4)原点復帰位置が正しくない
① 1GRID ほど食い違う
項
1
2
障 害 要 因
確 認 方 法
処 置
減速ドッグ位置が不良
原点位置から減速ドッグ方向に機械を移動
させて、診断機能で減速信号を観測しなが
ら原点位置と減速ドッグの位置と距離をN
Cの位置から読み取ります。
減速ドッグを離れて
原点位置に到達する
までの距離をモータ
の約1/2回転の距
離にします。
減速ドッグ位置が短い
適用説明書を参照し
画面状態表示で「自動」が表示されている て 、 必 要 な 長 さ の
のかを確認します。 ドッグに変更しま
す。
② ストップ位置が不規則で正しくない
項
障 害 要 因
確 認 方 法
処 置
ケーブルシールドを
接地します。
スパークキラーを装
着します。
ケーブルを分離しま
す。
ケーブルの電源線
4.75V以上であるこ
(5V)/0Vを追加しま
す。
ケーブルシールドが接地されているのか、
ソレノイドコイルなどにスパークキラーが
装着されているのかを確認します。
エンコーダケーブルが強電ケーブルと分離
されているのかを確認します。
1
ノイズ
2
エンコーダの電圧が低 エンコーダ電源電圧が
い
とを確認します。
3
サーボモータと機械と モータシャフトにマークをつけて機械位置 カップリングを強く
のカップリングが緩い と対応をチェックします。
締め付けます。
4
エンコーダの不良
エンコーダを交換してみます。
エンコーダを交換し
ます。
5
EPS8基板の不良
プリント基板を交換してみます。
EPS8基板を交換しま
す。
1-32
4. NCの機能および動作異常
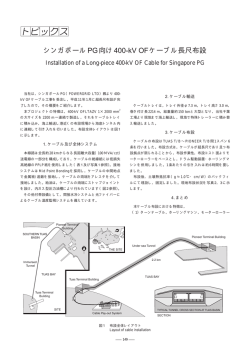
<原点復帰位置の調整方法>
1)概要
原点復帰をするときは減速ドッグと原点復帰位置の関係がたいへん重要です。
原点復帰を失敗するとストップする位置がモータ1回転ほど変わり、正確な原点復帰
はできません。ここではドッグをまたはパラメータを設定するにあたってどのように
すると問題が生じないのかを説明します。
2)原点位置確認方法
例えばX軸(パラメータ1823番 DIA = 0)をチェックする方法を説明します。
イ)原点位置からハンドルモードでX軸を選択し、相対値
X0を押して、診断画面の
0000番の7ビット目 <DEC> が0になるまで-方向に送ります。
ロ)0になった後ハンドルを少しずつ+方向に送り<DEC>
が1になるとその位置(X軸
の相対位置)をチェックします。ここでは任意にA(㎜)とします。
ハ)A(㎜)が0に近い場合、またはモータ1回転ぐらいの時に問題になります。
減速ドッグ
イ
DEC
ロ
原点位置
3)原点位置調節の2種類の方法
イ)減速ドッグを移動しAを約モータ1回転当り送り距離/2(㎜)とします。
ロ)REF.POINT SHIFT PARAMETER値を増やすとか減すとかしてAを約モータ1回転当り
送り距離/2(㎜)になるように調節します。
→ 原点位置はパラメータ設定値により変ります。(詳しいことは"5)原点位置シ
フト方法" 参照)
1-33
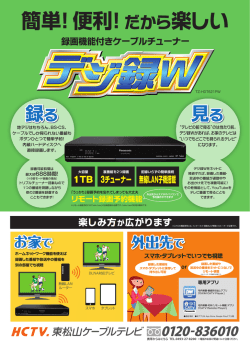
第1章 障害の追跡および処理
原点復帰開始
RAC
診断0000
RPR ACTION FLS SPEED
モータ速度
パラメータ
1809
原点復帰開始
DEC
診断0000
REF.POINT SHIFTが
0の場合
機械ストップ位置
設計指定
機械原点
パラメータ
1810 = 0
パラメータ
1810 = 4300
機械ストップ位置
減速ドッグ位置に移動
設定機械の原点と実際の機械のストップ位置の一致
図1-31 原点復帰のタイミングチャート
1-34
4. NCの機能および動作異常
4)原点復帰動作順序
SENTROL2の原点復帰方式はグリッドシフト(GRID SHIFT)方法です。
パラメータ1823番 DIA=0,エンコーダパルス 6000 PPR,1回転当り10mmピッチの場合
イ)原点復帰信号パラメータ1801番 <RAC> が1になると軸が原点方向に早送り(G00)の
速度で向かいます。
ロ)減速ドッグがオンになると軸が減速を開始し、加速が終わるとFL速度で動きます。
ハ)軸が減速ドッグがオフになると REF.POINT SHIFT=0の場合、 ENZが1の時ストップ
します。
5)原点位置シフト方法
イ)図1-31の①と同じ設計指定原点から原点調整をしようとしたときにパラメータ
1810番を利用します。(RP.SHIFT AMOUNT)
①の場合、設計指定原点まで4300㎛(MPGハンドルで操作)なのでパラメータの設定値
をパルス単位で計算します。
PR.SHIFT AMOUNT = 4300 (㎛) ×
6000 × 4(パルス)
10000(㎛)
= 10320
ロ)この状態で原点復帰すると図1-31の②のように
値とは異なる
-5700
ENZがグリッドシフトして目標
の位置にストップします。これはその位置であらかじめ減速
ドッグがオフされたためです。
ハ)それで図1-31の③と同じ減速ドッグを右側に移動させると④のように設計指定
原点と機械ストップ位置が一致します。
ニ)このときⓐとⓑの距離はモータ 1/2 回転程度にします。ⓐとⓑの位置がお互いに
接近すると原点位置がモータ1回転だけ誤差が発生します。
注意)NC旋盤(SENTROL300-L)でX軸に直径指令をする場合(パラメー
タ1823番 <DIA=1>)、 画面数値は実際に機械が動く距離の2倍になるので調整が
必要な場合でだけ1823番の<DIA>を0にし、調整後には必ずまた1に復帰させま
す。
1-35
第1章 障害の追跡および処理
5. 画面の異常
5.1 電源オンスイッチを押しても画面が現れない
メインユニットの状態表示LEDの表示内容を確認します。
現象
(ページ5-2 参照)
電源ONスイッチを押して
も画面が出ない
電源ON 1分後に状態表示
LEDの表示표が“ 0 ”
状態表示LEDが
点灯しない
原因
電源ON 1分後に状態表示
LEDの表示표が“A”,“3”
CPU CARD
CPS1の不良
電源ON後、画
面の色が暗いま
まだ
電源ON 3,4秒後
画面の色が若干明
るく見える
メインユニット
の+24VのLEDが
点灯する
メインユニット
の+24VのLEDが
点灯しない
電源ON異常
ページ 1-38を
参照
メインユニット
のP24VのLEDが
点灯する
PSP8基板の不良
メインユニット
のP24VのLEDが
点灯しない
PSP8基板の
ヒューズ断線
LCDパネル不良
ケーブル接続不良
DKU RGB ユニット
〜 LCD パネル
ページ 5-9を参照
RGB ユニット不良
ページ 5-5を参照
ケーブル接続不良
メ イ ン ユ ニ ッ ト 〜 D KU の12 VL E D
DKU(ケーブル CND1)
が点灯する
ページ 5-9を参照
DKUの12VLEDが点
灯しない
状態表示
LED
バックライト
の不良
バックライト
インバータの
不良
+24V LED
P24V LED
RGB ユニット不良
ページ 5-9を参照
注) DKU: Display Keyboard Unit (表示装置)
1-36
ケーブルの接続
不良
DKU DC24V電源
の(CNP1,2コネクタ)
ページ5-9を参照
DKUのSCA4基板不良
ページ 5-9を参照
5. 画面の異常
5.2画面が消える
5.2 画面が消える
現象
NC動作中に画面
が消えます。
ケーブル接続不良
メインユニット
~ DKU RGB
ユニット
(ケーブル CND1)
ケーブル接続不良
DKU RGBユニット
~ LCDパネル
ページ5-5参照
RGBユニット不良
ページ5-5参照
原因
ノイズ問題
ノイズ対策
ケーブル CND1
メインユニット~DKU RGBユニット
1.ケーブルの両端にフェライトコアーを付着
メーカ:TDK ZCAT2132-1139-M
2.ケーブルの両端にシールドをコネクタの金属部
へ連結
3.ケーブルのDKU側にコネクタケースをノイズ
防止タイプ(銀色)
静電気問題
静電気対策
1軸ランニングソウ(木工機械)の場合
DKU(表示装置)とPVCホース(鋸屑
集塵機)間の間隔を広げます。
インバータモータのノイズ
1.加速,減速時間を長くする
2.モータ動力線と他の配線を分離する
リレー
1.速い速度でオン・オフするリレーコイルにダイ
オードを付着
接点にスパークキラーを付着
(本説明書 ページ5-14参照)
5.3 画面に縞が現れる
画面に縞が現れる
ケーブル連結不良
DKU RGBユニット
~ LCDパネル
ページ5-5参照
RGBユニット不良
ページ5-5参照
1-37
LCDパネルの
不良
第1章 障害の追跡および処理
6.電源オンの異常
電源ON スイッチを押しても
メインユニットの +24V LED
(PSP8基板)が点灯しない
NC電源用
DC24V AVRの
不良
現象
原因
PSP8基板内部のNC
電源ON/OFF回路
の不良
(PSP8基板がRev.2)
強電盤のNC電源
ON/OFF回路の
不良
(PSP8基板がRev.1)
電源ONでき
ない
NC電源用 DC24V AVR
に、AC220Vが供給され
ていない
1-38
6. 通信障害
7.通信障害
現象:① 編集モードで外部機器でプログラムを入力しようとしても、画面の"入力中"
の文字が点滅しているが、入力テープ長の表示が現れない。
② DNC運転しようとしても、"入力中"の文字が点滅しているが、入力テープ
長を表示する数字が"0.00m"のまま変らない。
③ 編集モードで外部機器でプログラムを出力しようとしても、NC画面に"入力
中"の文字とテープ長の表示が表示されるがPCへの入力ができない。
項
1
2
障害要因
ケーブル配線不良
パラメータ設定誤り
確認方法
処置
ケーブル配線チェック
通信機器とNC側とのパラメータを
お互い合わせます。
本説明書の付録14
を参照(9-20ペー
ジ)
(1) プログラムの先頭に'%'信号
があるのか?
3
プログラムの先頭に
'%'信号がない
(2) プログラムの先頭に'%'信号
が無くても通信するときプログ
ラムの先頭に'%'を付けるソ
フトウェアなのか
NCの軸のコネクタ電圧チェック
(25ピンコネクタ/
9ピンコネクタ) (正常時電圧)
電圧が正常でないと
SD(2ピン/3ピン)
きはICの故障の可
SG(7ピン/5ピン)
4
通信用ICの故障
RD(3ピン/2ピン)
SG(7ピン/5ピン)
RS(4ピン/7ピン)
SG(7ピン/5ピン)
CS(5ピン/8ピン)
SG(7ピン/5ピン)
1-39
-8 ~ -12V
0V ~ 0.5V
-8 ~ -12V
0V ~ 0.5V
能性があります。
(CPUカードの交
換要)
↓
当社に連絡
1.サーボ関連アラーム
アラームの表現方式
第 2 章 サーボ
1. サーボ関連NCアラーム(詳細)
アラームの表示型式
0120
X RPR ERROR
アラームメッセージ
アラーム番号
アラーム発生軸の名称
軸の名称は パラメータ"1020 NAME OF EACH AXIS"で設定できま
す。ただし、設定範囲は65~90(A~Z)。説明書では軸名称部分を"□"で表記し
ます。
2-1
第2章 サーボ
0120
□ RPR ERROR
原点復帰中(診断 №0000 <RAC> = 1 のとき)減速スイッチ(診断 №0000 <DEC>)
がオンした後、オフするまで1回転信号(ENZ)が一度も検出されないときにアラーム
が発生します。
DEC
速度
検出遅延
約 20㎳
ENZ
この期間にENZが検出されない場合アラーム発生
項
障害要因
確認方法
処 置
1
速度が速すぎます。
RT0早送り速度にアラームが発生す
る場合RT1,RT2で原点復帰を
し、正常になる場合。
速度を落します。
減速ドッグを長くし
ます。
復帰開始位置と原点までの距離を
チェックして下さい。
原点でモータ2回転
分以上離れた位置で
復帰を実行して下さ
い。
2
復帰開始位置が近す
ぎます。
3
パルスコーダ電源電
圧が低すぎます。
パルスコーダ電圧が4.75V以上あ
ること。
ケーブルによる電圧
降下が5Vと0V
両側を合わせて0.2
V以下がなるように
して下さい。
4
パルスコーダの不良
パルスコーダを交換して下さい。
交換。
5
EPS8基板の不良
EPS8基板を交換して下さい。
交換。
2-2
1.サーボ関連アラーム
№0707 EXCESS ERROR
ENZは診断画面"0006 ENZ"で確認できます。
リニアスケール使用時に原点復帰信号が減速スイッチオン後オフまでの期間に検出できるよ
うに調整し、リニアスケール原点信号は診断画面"0006 ENZ"で確認できます。
1回転信号およびリニアスケール原点信号が入力されたのかを診断画面"0005
ENC
ODER CTR SKIP"で確認できます。なぜかと言うとその信号により位置カウンタ
をラッチした値が表示されるためです。表示が変ったときがその信号が入力されたときで
す。
0707
□ EXCESS ERROR (STOP)
停止時の位置偏差量がパラメータ設定値よりも過大です。
停止時の位置偏差量(診断画面"0002
POSITION
ERROR")とパラ
メータ1804番"STOP POS ERR LIMIT"値を比較し、位置偏差量が設定
値を越えた場合にアラームになります。
アラーム解除は非常停止スイッチオン、オフで行います。ただしパラメータ1823番"
ERC = 1"または位置偏差量が設定値より小さくないといけません。
項
障害要因
確認方法
処 置
位置偏差量設定ミス
パラメータ1804番の内容がNCに添付
されているパラメータ表の通りになっ
ているのかを確認します。
正しいパラメータ値
を設定します。
2
アンダーシュート
NCの加減速時間でモータを加減速さ
せるのに必要な電流がモータに流れて
いないと一時的に位置制御回路の誤差
量が増えます。
NCの加減速時定数
を長くします。
3
電源電圧異常
制御部電圧を確認します。
不良個所を直しま
す。
4
接続不良
エンコーダ線、モータ動力線等の接続
を確認します。
特にエンコーダ信号線の接触不良およ
びA,B相信号線が反対に接続されて
いないかを確認します。(別置のエン
コーダの場合、取りつけ方向の確認)
不良個所を直しま
す。
5
位置制御部であるE
PS8基板および
サーボアンプのプリ
ント基板の故障
EPS8基板を交換して下さい。
プリント基板を交換
します。
1
2-3
第2章 サーボ
0708
□ EXCESS ERROR (MOVING)
移動時の位置偏差量がパラメータ設定値よりも過大です。
停止時の位置偏差量(診断画面"0002
POSITION
ERROR")とパラ
メータ1805番"MOVING POS ERR LIMIT"値を比較し、位置偏差量が
設定値を越えた場合にアラームになります。
アラーム解除は非常停止スイッチオン、オフで行います。ただしパラメータ1823番"
ERC = 1"または位置偏差量が設定値より小さくないといけません。
項
障害要因
確認方法
処 置
1
位置偏差量設定ミス
パラメータ1805番の内容がNCに添付
されているパラメータ表の通りになっ
ているのかを確認します。
正しいパラメータ値
を設定します。
2
オーバシュート
NCの加減速時間でモータを加減速さ
せるのに必要な電流がモータに流れて
いないと一時的に位置制御回路の誤差
量が増えます。
NCの加減速時定数
を長くします。(制御
部で設定)
3
電源電圧異常
制御部電圧を確認します。
不良個所を直しま
す。
4
接続不良
エンコーダ線、モータ動力線等の接続
を確認します。
不良個所を直しま
す。
5
位置制御部であるE
PS8基板および
サーボアンプのプリ
ント基板の故障
EPS8基板を交換して下さい。
プリント基板を交換
します。
2-4
1.サーボ関連アラーム
№0709 DRIFT OVER
0709
□ DRIFT OVER
ドリフト補正量(パラメータ
1822番)値、または自動ドリフト補正の場合(パラメー
タ1823番"ADF = 1")は診断画面"0013 DRIFT"の値が± 1632以
上のときアラームになります。
アラーム解除は非常停止スイッチオン、オフで行います。
項
障害要因
確認方法
1
サーボ調節不良
サーボ調節が正しくされているか?
サーボ調節を行いま
す。
2
機械の衝突
アラームヒストリなどで確認
電源をオフし、また
オンします。
3
長期間のドリフトの
累積
機械の稼動時間など
サーボ調節をもう一
度行います。
4
サーボユニット不良
サーボユニットを交
換します。
5
EPS8基板の不良
プリント基板を交換
します。
2-5
処 置
第2章 サーボ
0712
□ READY OFF ERROR
P-READY(診断画面"0007 PRD"をオンしてもV-READYがオフ(診
断画面"0007 Bit2 = 1")状態です。
アラームの解除は原因を除去しリセットキーオンで行います。
パラメータ1815番"VOC = 1"のときアラームキャンセルになります。
項
1
障害要因
確認方法
サーボユニットに
サーボユニット用マグネットコンダク
AC220V電源の
タ、リレーがオンするのを確認しサー
供給がなされていな
ボユニットのR,S,T間とr,t間電
い、または電圧不足
圧を測定します。
処 置
接続ミスなどの原因
の除去。
サーボユニット用マ
グネットコンダク
2
タ、リレーのコイル
に電源の供給がなさ
れていない、または
電圧不足
3
サーボユニット用マグネットコンダク
タ、リレーがオンしないことを確認
接続ミスなどの原因
の除去。
し、コイル電圧をチェックします。
マグネットコンダク
マグネットコンダク
タ、リレーの不良
タ、リレーの交換。
4
シーケンスの問題
5
サーボユニット不良
5
EPS8基板の不良
シーケンスチェック
原因除去。
プリント基板を交換
します。
2-6
1.サーボ関連アラーム
№0713 READY ON ERROR
0713
□ READY ON ERROR
P-READY(診断画面"0007 PRD"をオフしてもV-READYがオン(診
断画面"0007 Bit2 = 1")状態です。
アラームの解除は原因を除去しリセットキーオンで行います。
パラメータ1815番"VOC = 1"のときアラームキャンセルになります。
※このアラームはあまり発生しませんが、もし発生したらマグネットコンダクタ、リ
レーの故障が原因になり得ます。
0714
□ ENCODER DISCONNECT
エンコーダの信号のA相、B相、ゼロ信号線の断線。
アラームの解除は原因を除去しリセットキーオンで行います。
エンコーダの信号を一般診断画面で確認できます。
診断画面№0006 ENA:A相信号
ENB:B相信号
ENZ:ゼロ信号
項
障害要因
確認方法
処 置
1
ケーブルの接続不良
エンコーダ帰還ケーブルの接続および
ケーブルを修正しま
す。
2
EPS8基板の不良
EPS8基板を交換
します。
3
サーボモータのエン
コーダ不良
モータまたはエン
コーダを交換しま
す。
配線を確認します。
2-7
第2章 サーボ
0715
□ EXCESS ERROR (SERVO OFF)
サーボオフ時の位置偏差量がパラメータ設定値よりも過大です。
サーボオフ時の位置偏差量(診断画面"0007 RPD = 1, EBL = 0"とパラ
メータ1806番"SERVO OFF POS ERR LIMIT"値を比較し位置
偏差量が設定値を越える場合にアラームになります。
アラームの解除は非常停止スイッチのオン、オフで行います。ただしパラメータ1823
番"ERC = 1"または位置偏差量が設定値よりも小さくないといけません。
パラメータ1815番"SOC
=
1"にすることによってアラームをキャンセルできま
す。
※このアラームの原因はサーボオフ状態でその軸が外力または衝突により大きく動く
ことです。
0730
□ PULSE COUNT MISS (ENC)
エンコーダの信号の位置フィードバック用カウンタでカウンタ誤差が発生しました。
カウンタ誤差量は診断画面"0012 PULSE COUNT MISS"に表示され
ます。
アラームチェック機能は原点復帰完了後有効になります。パラメータ1815番"F1C
= 1"でアラームチェックが無効になります。
アラーム解除はリセットキーオンで行います。
項
障害要因
確認方法
1
パラメータ設定ミス
パラメータ番号1824番"ZERO P
ULSE WIDTH"が正しい値?
(YASKAWA サーボ:標準4)
2
サーボモータのエン
コーダ不良
3
ノイズによるカウン
トミス
処 置
再設定。
モータまたはエン
コーダを交換しま
す。
モータのアース線、エンコーダケーブ
ルのシールド等を確認します。
2-8
原因除去
1.サーボ関連アラーム
№0713 READY ON ERROR
0732
□ UNFIT ENCODER 1REV. ON(ENC)
エンコーダ1回転当り発生パルス数が違います。異常だと判断されたパルス数は診断画
面"0013 ENC 1REV PULSE"に表示されます。リセットキーがオンさ
れるまで表示は保持されます。
パラメータ1815番"FIC = 1"のときこの機能はキャンセルされます。
項
障害要因
確認方法
1
パラメータ設定ミス
パラメータ番号1801番"ENCODE
R TYPE"が正しい値か?
2
サーボモータのエン
コーダ不良
3
ノイズによるカウン
トミス
0734
処 置
再設定。
モータまたはエン
コーダを交換しま
す。
モータのアース線、エンコーダケーブ
ルのシールド等を確認します。
原因除去
□ AUTO GAIN OVER
自動ゲイン補正量が大き過ぎます。アラーム解除はリセットキーをオンします。
項
障害要因
1
サーボ調節不良
2
サーボユニット不良
サーボユニットを交
換します。
3
EPS8基板の不良
EPS8基板を交換
します。
0736
確認方法
サーボ調節が正しくされているか?
処 置
サーボ調節をしま
す。
□ SERVO ALARM
サーボユニットのLEDに何番の番号が表示されているのかを確認します。
本説明書では次のページ以降を参照し、アラーム内容を確認、処置して下さい。
2-9
1.トラブルシューティング方法
1.1トラブル発生時の確認事項
第 3 章 スピンドル
1. トラブルシューティング方法
1.1 トラブル発生時の確認事項
制御装置にあるトラブルが発生した場合、まず次の事項を確認します。
①
コントローラのアラーム表示はどのアラームを表示しているのか、また過去のア
ラームに対しても表示器のアラームモードで確認します。
② ヒューズが切れた場合、それはR,S,T相中どの相なのか?
(制御回路入力 ヒューズF1,F2,F3)
③ 故障、異常が再発生する可能性はあるのか?
④ 周囲温度、強電盤内温度は正常なのか?
⑤ 加速中なのか減速中なのか?または一定速度運転中なのか?そのときの速度は?
⑥ 正回転、逆回転での差が無いか?
⑦ 瞬間停電が無かったのか?
⑧ ある特定の操作、指令のとき発生するのか?
⑨ 発生頻度はどの程度なのか?
⑩ 負荷が加重されるときなのか?そうでなければ減少するときなのか?
⑪ 部品交換、応急処置などを試して見たのか?
⑫ 稼動開始後何年程度過ぎたのか?
⑬ 電源電圧は正常なのか?または時間によって大きく変るのか?
1.2 第1段階
トラブルシューティングの第1段階として次の事項を確認して下さい。
(1) 電源電圧:200V+10%-15%,50/60㎐,210V,
220V+10%-15%,60㎐,特に200V-15%より短時間でも落ち
ないこと。
例) ① 毎日定時刻に電圧が降下する。
② 特定機械の稼動時に電圧が降下する。
3-1
第3章 スピンドル
(2) コントローラ周辺の制御機能は正常か?
例) ① NC,シーケンス回路などは正常なのか?
② 肉眼でチェックした結果部品、配線などの異常はないのか?
(3) 制御装置周辺の温度(ファン内温度)は55℃以下なのか。
(4) コントローラの外観に異常がないのか?
例) ① カード部品、パターン焼損、異常など
② 配線の接続具合、破損、異物混入など
(5) スピンドルパワーユニットの出力はすべて定格電圧か?
以上の状況を充分に確認すると、どの部分に異常が発生したのかをある程度判断できま
す。
スピンドルユニットの問題発生の種類は大きく分類すると次のようになります。
• 最初にコントローラの電源をオンしても正常に動作しない。(Ⅰ)
固定分類 A
• 今まで正常動作をしていたが突然動作が止まった。(Ⅱ)
• 時々正常動作をしない。オリエント停止位置が正しくない。
アラームが表示される。(Ⅲ)
• コントローラの異常
主回路部の異常
制御回路部の異常
• 検出機の異常
速度検出用エンコーダの異常
多点オリエント用エンコーダの異常
固定分類 B
1ポイントオリエント用マグネットセンサ
の異常
• NCからのパラメータ、転送データの異常
• 電源の異常
• モータの異常
• その他の異常(入力信号の条件不足、ケーブル断線など)
3-2
1.NC装着時の検査および調整
第 4 章 設置および調整
1. NC装着時の検査および調整
NCを装着時には下の順序に従って検査および調整を実施します。より詳しい内容は下
の表の備考欄に記録された項目を参照してください。
順
内 容
備 考
1
NCメインユニット、DKUおよびサーボユニットの外観を検査し
(1)項参照
ます。
2
ねじで固定した端子が完全に接続されているのかを確認します。
(2)項参照
3
外部ケーブルを接続します。
(3)項参照
4
NC用電源をOFFした状態で電源入力ケーブルを接続します。
(4)項参照
5
コネクタの接続位置が合っているのかを確認します。
(5)項参照
6
設定を確認します。
(6)項参照
7
入力電源電圧、周波数を確認します。
(7)項参照
8
出力電圧がアースとショートしていないかを確認します。
(8)項参照
9
電源を投入後、出力電圧を確認します。
(9)項参照
10 NCと機械側とのインタフェイス信号を確認します。
(10)項参照
11 各種パラメータおよび設定データを確認します。
(11)項参照
12 電源をOFFします。
(12)項参照
13 モータ動力線を接続します。
(13)項参照
14 電源をONします。
(14)項参照
15 手動送りで各軸の動きを調査します。
(15)項参照
16 サーボ系を調整します。
(16)項参照
17 NCのすべての機能が正常動作するのかを確認します。
(17)項参照
4-1
第4章 設置および調整
(1) NCメインユニット、DKUおよびサーボユニットの外観を検査します。
① 操作盤ボックス内部、手動操作盤などの外観が汚れているとか破損個所が無いか確
認します。
② 強電盤内のプリント基板、サーボユニットなどの付着状態が緩んでいたり、抜けて
いるものがないか確認します。
③ 強電盤内のケーブルに傷がないか(被服が剥がれていないか)確認します。
(2) ねじで固定した端子が完全に接続されているのかを確認します。
① トランスの端子台(1次側、2次側)に異常がないか確認します。
② 各端子台のカバー(アクリル板)がある所に対しては付着状態、破損状態を確認しま
す。
(3) 外部ケーブルを接続します。
① NCと機械側強電盤の間に充分な厚さ(14㎜以上)の保護アース線が接続されてい
るか確認します。
② 保護アースは機械側強電盤から接地アースに連結された1点アース型式なのか確認
します。
③ 信号ケーブルは全部一括シールドされているのか確認します。
④ ケーブル仕様は適用説明書の指定に従っているのか確認します。
ⓐ モータ信号用 ⓑ モータ動力用 ⓒ サーボユニットインターフェイス用
ⓓ ポジションコーダ用 ⓔ スピンドルアナログ出力用 ⓕ 手動パルス発生器用
ⓖ DKU用 ⓗ RS232C インターフェイス用 ⓘ PLC DI/DO用
(4) NC用電源をOFFした状態で電源入力ケーブルを接続します。
① モータ動力線をはずした状態でします。
(5) コネクタ連結位置が合っているのかを確認します。
① Dサブコネクタは固定ねじで固定されているのか確認します。
② モレックスコネクタ(CNACIN,CNACOUT)の固定は確実にされているのか確認します。
(6) 設定を確認します。
① 電源トランス端子の設定を確認します。
② ACサーボユニットのプリント基板の設定を確認します。
③ ACスピンドルユニットのプリント基板の設定を確認します。
4-2
1.NC装着時の検査および調整
(7) 入力電源電圧、周波数を確認します。
① 入力電源電圧が下の仕様を満足しているのかを確認します。
DC 24V±10% 3A
② NCメインユニット、サーボユニットの消費電力に対する入力電源容量は充分なの
かを確認します。
(8) NCメインユニット内の電圧がアースとショートしていないかを確認します。
① PSP8基板(電源基板)の各出力電圧が0Vとショートしていないかを確認しま
す。
ⓐ P5V1と0V ⓑ P5V2と0V
② DIO4基板(電源基板)の出力電圧が0Vとショートしていないかを確認します。
ⓐ P5Vと0V
(9) 電源を投入後、NCメインユニット内の電源電圧を確認します。
PSP8基板/DIO4基板(電源基板)の該当チェックピンで各出力が下の表の範囲
内なのかを確認します。
電圧出力名称 定格電圧
許容電圧範囲
測定場所
NC機種
P5V1
+5V
+5V〜+5.2V
PSP8基板のP5V1とOV
306/304/308
356/354/358
P5V2
+5V
+5V〜+5.2V
PSP8基板のP5V2とOV
306/304/308
356/354/358
P5V
+5V
+5V〜+5.2V
DIO4基板のP5VとOV
303/353
(10) NCと機械側とのインタフェイス信号を確認します。
診断機能一覧表を参照して下さい。
(11) 各種パラメータおよび設定データを確認します。
パラメータ一覧表を参照して下さい。
(12) 電源をOFFします。
(13) モータ動力線を接続します。
4-3
第4章 設置および調整
(14) 電源をONします。
① アラームが発生する場合はアラーム一覧表に従って処理します。
② 電源のON/OFFおよび非常停止を数回反復し、モータが回転しないことを確認
します。
(15) 手動送りで各軸の動きを調査します。
① 手動パルス送りまたはインクレメンタル送りで10㎛ずつ動かしてみます。この時
に機械が正確に動くのかを確認します。
② 手動JOG送りで低いオーバライドで動かし、機械に設定されたリミットスイッチ
を故意に動作させて"EMERGENCY L/S ON ALARM"の検出時に機械が正確に停止す
るのかを確認します。
③ 手動JOG送りまたは手動送りオーバライドを変化させながら動かし、最高送り速
度でも誤差過大などのアラームが出るのかを確認します。
(16) サーボ系を調整します。
簡単なプログラムで自動運転しながら一般診断(診断番号014)に現れるポジション
ループゲイン値が設定値(パラメータ1803番)の0.5%以内なのかを確認します。
(16) NCのすべての機能が正常動作するのかを確認します。
① 原点復帰をします。
② グリッドシフト量を設定します。これは設定後に一度電源をOFFし、もう一度電
源をONした後に有効になります。
③ 機械に合ったテストプログラムで連続運転試験をします。
4-4
2.電源電圧の確認
2.1 入力電圧の確認
2. 電源電圧の確認および調整
2.1 入力電圧の確認
入力電源電圧が下の仕様を満足することを確認します。
メインユニットのPSP8/DIO4基板のCNP1コネクタの
+24V、0V間でチェックします。
DC 24V ±10%
2.2 ヒューズ
ヒューズはPSP8/DIO4基板に2個、EPS8基板に1個、SCA4基板
(DKU)に2個あります。
PSP8基板 F1、F2 DC24V電源入力ヒューズ
☞ LITTLEFUSE 125V 5A P/N 0453 005
ESP8基板 F1
P24V1 サーボ DI/DO電源ヒューズ
☞ LITTLEFUSE 125V 1A P/N 0453 001
SCA4基板 F1、F2 DC24V電源入力ヒューズ
☞ LITTLEFUSE 125V 3A P/N 0453 003
上のヒューズ状態を確認して断線していれば交換します。
交換時には同一品と交換します。
ヒューズ断線はテスタでチェックします。
(基板上のヒューズの位置は第5章 ハードウェア を参照)
4-5
第4章 設置および調整
2.3 DC電圧の確認
メインユニット内の直流電源電圧の測定方法は下のようになります。
電圧出力名称 定格電圧
許容電圧範囲
測定場所
NC機種
P5V1
+5V
+5V〜+5.2V
PSP8基板のP5V1とOV
306/304/308
356/354/358
P5V2
+5V
+5V〜+5.2V
PSP8基板のP5V2とOV
306/304/308
356/354/358
P5V
+5V
+5V〜+5.2V
DIO4基板のP5VとOV
303/353
PSP8基板 Rev.1
PSP8基板 Rev.2
PSP8基板
メインユニット
DIO4基板
メインユニット
3. 各プリント基板のボリューム
基板名
ボリューム名
ボリュームの機能
RAD1
VR1
A/D 0V調整
VR2
A/D ゲイン
VR3
電源電圧(+5V)設定
出荷時に調整して固定しているので出荷後は調整を禁じます。
4-6
4.画面の調節方法
4.1 TFT LCD
4. 画面の調整方法
4.1 画面調節ボタンの位置
MENU
DOWN
LEFT RIGHT
POWER
DKU (Display/Keyboard Unit) 裏面
4.2 画面調節ボタンの機能
ボタン名
ボタンの機能
MENU
画面調整メニューが画面に出るようにするボタン
DOWN
下方画面移動ボタン / 画面自動調節
LEFT
左移動ボタン / 調節値を減少させます。
RIGHT
右移動ボタン / 調節値を増加させます。
POWER
電源(画面)ON/OFFボタン
4-7
第4章 設置および調整
5. サーボの調整方法
5.1 パラメータの設定
NCの設定画面の保守パラメータおよびサーボユニットのパラメータを下の表を参照して
設定します。
YASKAWA SIGMA
LG FDA-5000
定格回転数(rpm)
1000rpm 1500rpm 3000rpm 1000rpm 1500rpm 3000rpm
最大回転数(rpm)
2000rpm 3000rpm 4500rpm 2000rpm 3000rpm 5000rpm
NC
1803番
3000
1803番
3000
1803番
3000
1803番
3000
1803番
3000
1803番
3000
パラメータ
1807番 1807番 1807番 1807番 1807番 1807番
5000(㎷) 3334(㎷) 2223(㎷) 5000(㎷) 3334(㎷) 2000(㎷)
サーボユニット
パラメータ(rpm)
CN-03
CN-03
CN-03
P3-13
P3-13
P3-13
200(rpm) 300(rpm) 450(rpm) 2000(rpm) 3000(rpm) 5000(rpm)
PANASONIC MINAS
MITSUBISHI MR-J2
定格回転数(rpm)
1000rpm 1500rpm 3000rpm 2000rpm 3000rpm 3000rpm
最大回転数(rpm)
2000rpm 3000rpm 5000rpm 3000rpm 4000rpm 4500rpm
NC
パラメータ
サーボユニット
パラメータ(rpm)
1803番
3000
1803番
3000
1803番
3000
1803番
3000
1803番
3000
1803番
3000
1807番 1807番 1807番 1807番 1807番 1807番
5000(㎷) 3334(㎷) 2000(㎷) 3334(㎷) 2500(㎷) 2223(㎷)
Pr-50
200(rpm)
Pr-50
300(rpm)
Pr-50
P-25
P-25
P-25
500(rpm) 3000(rpm) 4000(rpm) 4500(rpm)
DAEWOO AC SERVO
定格回転数(rpm)
1000rpm 1500rpm 3000rpm
最大回転数(rpm)
2000rpm 2500rpm 4500rpm
NC
パラメータ
1803番 1803番 1803番
3000
3000
3000
1807番 1807番 1807番
5000(㎷) 4000(㎷) 2223(㎷)
サーボユニット
P-28
P-28
P-28
パラメータ(x2㎷) 3750(rpm) 3000(rpm) 1667(rpm)
詳しくは本説明書ページ7ー6、17およびSERVO UNIT MANUALを参照して下さい。
4-8
5.サーボの調節方法
5.2 ゼロセッティング
5.2 ゼロセッティング
イ)自動ドリフト補正機能の解除
NCの設定画面の保守パラメータを下のように設定します。
1823番のビット7 ADF
X:1 → 0
Y:1 → 0
Z:1 → 0
1822番
DRIFT AMOUNT
X:* → 0
Y:* → 0
Z:* → 0
ロ)NCの電源をOFFしてONします。
ハ)X,Y,Z軸サーボのゼロセッティング
1)NCの診断画面の一般診断 №0002 X軸のPOSITION ERROR [pulse]が"0"
になるようにX軸のサーボユニットのパラメータを調整します。
パラメータ
YASKAWA
SIGMA
CN00
00-03
A-
LG
FDA-5000
PANASONIC
MINAS
MITSUBISHI
MR-J2
DAEWOO
AC SERVO
P3-14
Pr52
P-29
P-09
2)1)のように№0002 Y軸の値を見ながらY軸のサーボユニットのパラメータ
を調整します。
3)1)のように№0002 Z軸の値を見ながらZ軸のサーボユニットのパラメータ
を調整します。
ニ)自動ドリフト補正機能の有効化
NCの設定画面の保守パラメータを下のように設定します。
1823番のビット7 ADF
X:0 → 1
Y:0 → 1
Z:0 → 1
ホ)電源をOFFしてONにします。
ヘ)ゼロセッティングの確認
診断画面の一般診断 №0002 X軸,Y軸,Z軸のPOSITION ERROR[pulse]がほと
んど"0"で№0010 X軸,Y軸,Z軸のDRIFTが"-5 〜 +5"以内に入るこ
とを確認します。
4-9
第4章 設置および調整
5.3 ポジションループゲインの調整
イ)自動ポジションループゲイン補正の解除
NCの設定画面の保守パラメータを下のように設定します。
1823番のビット5 AUG
X:1 → 0
Y:1 → 0
Z:1 → 0
ロ)NCの電源をOFFしてONにします。
ハ)X,Y,Z軸サーボのポジションループゲインセッティング
1)X軸をJOGまたは早送り速度2000~3000mm/min.で動いた時にNCの診断画面
の一般診断 №0011 X軸のPOSITION LOOP GAINが"2985 〜 3015"以内に
入るようにX軸サーボユニットのパラメータおよびNCの保守パラメータ1807
番 GAIN CONSTANTを調整します。
パラメータ
YASKAWA
SIGMA
LG
FDA-5000
PANASONIC
MINAS
CN04
CN05
P2-03
P2-04
Pr11
Pr12
MITSUBISHI
MR-J2
P-6, P-34
P-35, P-36
P-37, P-38
DAEWOO
AC SERVO
P-07
P-08
2)Y軸も1)と同じようにします。
3)Z軸も1)と同じようにします。
ニ)自動ポジションループゲイン補正の有効化
NCの設定画面の保守パラメータを下のように設定します。
1823番のビット5 AUG
X:0 → 1
Y:0 → 1
Z:0 → 1
ホ)電源をOFFしてONにします。
ヘ)ポジションループゲインの調整確認
1)X軸を早送りで速度2000~3000mm/min.で+方向、-方向を何回か動かした時に
NCの診断画面の一般診断 №0011 X軸のPOSITION LOOP GAINが+方向と
-方向が二つすべてまたは二つの平均値が"2985 〜 3015"以内に入ることを
確認します。
2)Y軸も1)と同じようにします。
3)Z軸も1)と同じようにします。
4-10
5.サーボの調節方法
5.4 オーバ/アンダーシュートの調整
5.4 オーバシュート、アンダーシュートの調整
注意)振動、異常な騒音など特別な問題が無ければ以下の調整をする必要はありません。
ループゲインの調整
1)X軸を自動運転で機械の最高速度/最低速度で動かすときサーボ波形表示機能
(ページ
4-25参照)でX軸の実速度を観測し加減速時の波形が次のように
オーバシュート、アンダーシュートがないかを確認します。オーバシュート、
アンダーシュートがあるときはサーボユニットのパラメータを調整します。
速
減速時
度
加速時
時間
パラメータ
YASKAWA
SIGMA
CN04
CN05
CN1A
Auto Tuning
CN00
00-05
C-
LG
FDA-5000
PANASONIC
MINAS
P2-03
P2-04
Pr11
Pr12
Auto Tuning
P2-22
P2-23
P2-24
Auto Tuning
Pr20
Pr21
Pr22
2)Y軸も1)と同様にします。
3)Z軸も1)と同様にします。
4-11
MITSUBISHI
MR-J2
P-6, P-34
P-35, P-36
P-37, P-38
Auto Tuning
P-2
DAEWOO
AC SERVO
P-07
P-08
第4章 設置および調整
5.5 負荷トルクの調整
イ)負荷トルクのチェック
1)X軸を速度 50mm/min. で動かすとき負荷トルクをサーボユニットに表示機能を
使用して確認します。負荷トルクが33%以下になることを確認します。
YASKAWA
SIGMA
パラメータ
LG
FDA-5000
St-08
(LoadRate%)
St-09
(MaxLoad%)
PANASONIC
MINAS
dP_oL
MITSUBISHI
MR-J2
J
(LoadRate%)
b
(MaxLoad%)
2)Y軸も1)と同様にします。
3)Z軸も1)と同様にします。
ロ)負荷トルクが50%以上になると負荷が重いと考えられます。
4-12
DAEWOO
AC SERVO
P-328
(LoadRate%)
P-329
(MaxLoad%)
5.サーボの調節方法
5.6 サーボ波形表示機能
5.6 サーボ波形表示機能
イ)機能概要
サーボ調整用速度波形をグラフィックで表示します。
(軸制御指令値、軸位置、主軸速度なども波形表示可能)
ロ)使用条件
パラメータ 2001番 <SWD> = 1 で設定
ハ)操作方法
1)サーボ波形表示画面を選択
診断画面を選択すると下のようなメニューが現れます。
ここで
を押すと下の図のようなサーボ波形表示画面が現れます。
図4-13 サーボ波形表示初期画面
4-13
第4章 設置および調整
2)サーボ波形設定画面
サーボ波形表示画面で
を押すとサーボ波形設定画面が現れます。
図4-14 サーボ波形設定画面
この画面ではサーボ波形表示をするために必要な項目を設定します。
矢印メニューで該当位置にカーソルを置いて下に出てくる説明を参考にして
を押すとか適当な値を入力し設定します。
(DATA SELECT / DATA SCALE / TRIGGER CHANNEL / TRIGGER LEVEL
/ TRIGER SLOPE / TIME SCALE /DATA OFFSET )
設定内容を確認した後
を押すとサーボ波形表示画面に戻ります。
*)サーボデータ保存機能(手動運転モードは除外)
1.
を押すと"INPUT FILE NAME NO."表示が現れます。
2.1~9999の範囲で空いているプログラム番号を入力します。
3.Oxxxx に最後にバッファリングしたサーボデータが保存されます。
4-14
5.サーボの調節方法
5.6 サーボ波形表示機能
a)DATA SELECT
画面表示は同時に4チャンネルまで可能で各チャンネルごとに項目を選択し
ます。
X :[AXIS SPEED] 軸実速度
X1:[COMMAND1] 加減速処理前の指令値
X2:[COMMAND2] 加減速処理後の指令値
X3:[DA-CNV]
D/A コンバータ値
X4:[POS ERROR] ポジションエラー値
X5:[POSITION] 軸位置
P :[POSITION CORDER] 主軸速度
b)DATA SCALE
波形表示速度範囲、速度表示にだけ適用(X, X1, X2) (mm/min)
[100 200 500 1000 2000 5000 10000 20000 50000 100000]中から選択
c)TRIGGER CHANNEL
トリガー対象チャンネルを選択/選択解除(OFF選択)
*)トリガー対象は X[AXIS SPEED] と X5[POSITION]
d)TRIGGER LEVEL
AXIS SPEED 選択時:DATA SCALEで選択された値を基準に
[0 +25 +50 +75 100 -100 -75 -50 -25(%)] の中から選択
POSITION 選択時:TRIGGER POSITIONを数字入力
e)TRIGGER SLOPE
トリガーする方向を [+,-] 選択、"+"は加速中、"-"は減速中を意味し
ます。
*)トリガー例 (AXIS SPEED TRIGGER CHANNEL 選択時)
DATA SCALE = 1000, TRIGGER LEVEL = +50, TRIGGER SLOPE = "+"
の場合データが 499 から 500 になる始点から測定を開始します。
(測定開始2~3秒前から波形表示ができます。)
e)TIME SCALE
データ表示時間間隔 [ 250 500 1000 2000 5000 1000 (msec)] 中から選
択します。
f)DATA OFFSET
データスケールで設定された値にこの値を補正して波形表示をします。
数字入力をします。
4-15
第4章 設置および調整
3)サーボ波形表示画面
/
を押してバッファリング(約10秒)が終わると波形が表示さ
れます。
①
②
③
④
ゼロ位置(ゼロ設定)
図4-16 サーボ波形表示画面
⑤
現在のカーソル位置
① ゼロ位置(基本測定開始時間)を"0"にする相対時間を表示します。
② 全体データに対する現在表示中のデータ位置とカーソル位置を表します。
③ 各チャンネルで選択された項目とデータ値そしてデータ単位を表します。
④ 設定された速度範囲を表します。(DATA SCALE + DATA OFFDET)
⑤ 現在の表示時間を表示します。(TIME SCALE)
:バッファリング後、波形表示をします。(測定中にもう一度押すと停止)
:サーボ波形表示画面に戻ります。
:バッファリング後、波形表示を連続します。(測定中にもう一度押すと停止)
:カーソルの位置を左側に移動させます。
:カーソルの位置を右側に移動させます。
:現在のカーソルの位置を"0"に設定します。
:一般診断メニューに戻ります。
4-16
1.システム構成
第 5 章 SENTROL 300/350のハードウェア
1. システム構成
SENTROL350の場合だけ接続します。
ユーザPC
SENTROL300の場合だけ接続します。
オペレータズボックス (SENTROL350の場合は必要ありません)
DKU
(Display and
Keyboard Unit)
機械
機械操作盤
強電盤
メイン
ユニット
I/O 機器
サーボ
ユニット
サーボモータ
スピンドル
ユニット
スピンドルモータ
機械操作盤 = オペレータズパネル(OP.パネル)
強電盤 = キャビネット
I/O機器 = USU(外部USB装置)ユニットなど
5-1
第5章 SENTROL 300/350のハードウェア
2. メインユニットの構成
2.1 SENTROL 306/356
強電盤(キャビネット)
に 4 個の ネジ で確
実に固定します。
状態表示LED
電源状態表示LED
P5V1,P5V2,P24V,+24V
PSP8基板(電源)
CPS1基板(CPU)
EPS8基板 NO.1(軸制御)
EPS8基板 NO.2(軸制御)
DIO8基板 NO.2(I/O)
DIO8基板 NO.1(I/O)
注)EPS8/DIO8基板は挿入するスロットの位置によって基板番号が定められます。
5-2
2.メインユニットの構成
2.2 SENTROL 304/354
2.2 SENTROL 304/354
強電盤(キャビネット)
に4 個 のネ ジで 確
実に固定します。
状態表示LED
電源状態表示LED
P5V1,P5V2,P24V,+24V
PSP8基板(電源)
CPS1基板(CPU)
EPS8基板 NO.1(軸制御)
DIO8基板 NO.1(I/O)
5-3
第5章 SENTROL 300/350のハードウェア
2.3 SENTROL 308/358
強電盤(キャビネット)
に4 個 のネ ジで 確
実に固定します。
状態表示LED
電源状態表示LED
P5V1,P5V2,P24V,+24V
PSP8基板(電源)
CPS1基板(CPU)
EPS8基板 NO.1(軸制御)
EPS8基板 NO.2(軸制御)
EPS8基板 NO.3(軸制御)
EPS8基板 NO.4(軸制御)
DIO8基板 NO.2(I/O)
DIO8基板 NO.1(I/O)
注)EPS8/DIO8基板は挿入するスロットの位置によって基板番号が定められます。
5-4
2.メインユニットの構成
2.4 SENTROL 303/353
2.4 SENTROL 303/353 (参考)
強電盤(キャビネット)に
4個のネジで確実に
固定します。
状態表示LED
CPS1基板(CPU)
EPS8基板(軸制御)
DIO8基板 NO.2(I/O)
電源状態表示LED
P24V,+24V
5-5
第5章 SENTROL 300/350のハードウェア
3. コネクタの配置図
3.1 メインユニットのコネクタ
1)PSP8基板(電源)のコネクタ
DC24V電源電圧降下表示LED
状態表示LED
CNLCD (外部オペレタ OPU1 接続)
CNMPG (MPG NO.1 〜 MPG NO.3 接続)
内部電源電圧チェック用コネクタ
電源状態表示LED
P5V1,P5V2,P24V,+24V
CNDCOUT (DC24V電源出力, 電源ON/OFF)
CNP1 (DC24V電源入力, MOLEX コネクタ)
2)CPS1基板(CPU)のコネクタ
状態表示LED
CF(Compact Flash) COVER
CNLAN (NETWORK)
CNUSB (SYSTEM USB)
CND1 (LCD)
CND2 (KEY)
CNCOM4 (RS422/485 #2)
CNCOM3 (RS422/485 #1)
CNCOM2 (RS232C #2)
CNCOM1 (RS232C #1)
5-6
3.コネクタの配置図
3.1 メインユニットのコネクタ
3)EPS8基板のコネクタ
EPS8基板はメインユニットのスロット
の挿入位置によって基板のNO.が定ま
ります。
EPS8基板 NO.1
EPS8基板 NO.2
EPS8基板 NO.3
CNR2 (リモート I/O)
CNR3 (リモート I/O)
CNR1 (リモート I/O)
CNA4 (第4軸 EPS8 NO.2)
CNA1 (第1軸 EPS8 NO.1)
CNA4 (第7軸 EPS8 NO.3)
CNA4 (第5軸 EPS8 NO.2)
CNA4 (第8軸 EPS8 NO.3)
CNA2 (第2軸 EPS8 NO.1)
CNA4 (第6軸 EPS8 NO.2)
CNA4 (第9軸 EPS8 NO.3)
CNA3 (第3軸 EPS8 NO.1)
CNS2 (スピンドル EPS8 NO.2)
CNS1 (スピンドル EPS8 NO.1)
CNS3 (スピンドル EPS8 NO.3)
CNAIN2 (アナログ入力)
CNAIN3 (アナログ入力)
CNAIN1 (ANALOG入力)
(EPS8 NO.1)
4)DIO8基板のコネクタ
DIO8基板はメインユニットのスロット
の挿入位置によって基板のNO.が定ま
ります。
DIO8基板 NO.3
DIO8基板 NO.2
DIO8基板 NO.1
CNIN2 (入力 DIO8 NO.2)
CNIN1 (入力 DIO8 NO.1)
CNIN3 (入力 DIO8 NO.3)
CNOUT2 (出力 DIO8 NO.2)
CNOUT1 (出力 DIO8 NO.1)
CNOUT3 (出力 DIO8 NO.3)
CNIO2 (入出力 DIO8 NO.2)
CNIO1 (入出力 DIO8 NO.1)
CNIO3 (入出力 DIO8 NO.3)
5-7
第5章 SENTROL 300/350のハードウェア
3)SID3基板のコネクタ
CNR1 (リモート I/O)
CNML (MECHATROLINKⅡ)
CNAOUT
CNS1 (スピンドル)
CNAIN1 (アナログ入力)
5-8
3.コネクタの配置図
3.2 DKU(Display Keyboard Unit)のコネクタ
3.2 DKU(Display Keyboard Unit)のコネクタ
CND2 (KEY)
CND1 (LCD)
CNUSB
外部 KEYBOARDコネクタ
CNP1 (DC24V電源入力 コネクタ)
SCA4基板
OSD基板
ヒューズ(3A)
予備ヒューズ
LCDパネル
UPA5基板
接地用
ネジ(M4)
RGBユニット
KEY24基板
KYE23基板
コネクタ名称
CND1
CND2
CNP1/CNP2
CNUSB
DKU側コネクタ
Dサブコネクタ 15ピン メス
Dサブコネクタ 9ピン メス
MOL4B
USB-A
5-9
第5章 SENTROL 300/350のハードウェア
3.3 EPS8基板のコネクタ及びヒューズ
EPS88基板はメインユニットのスロット挿入位置により基板番号が定まります。
EPS8 NO.1
EPS8 NO.2
EPS8 NO.3
CNB1
CNB2
CNB3
CNA1
CNA4
CNA7
CNA2
CNA5
CNA8
CNA3
CNA6
CNA9
CNS1
CNS2
CNS3
EPS8基板
メインユニット
状態表示LED
CNS1,2,3 コネクタ使用モード及びフォトカップラー挿入位置
CNS1,2,3 モード
スピンドルの
DO出力が
エミッタ─コモン
フォトカップラーの挿入位置
該当スピンドル
FANUC S シリーズ
PC13,14,15
FUJI 5000M3
⇨
FUJI 5000MS3
MITSUBISHI
ピンドルのDO出力が
コレクタコモン
PC16,17,18
⇨
SG-J, SF,
MDS-A-SPA, SPJA
YASKAWA VS626VM3
CNS1を
SERVO軸として
PC20,21,22
⇨
使用
5-10
CNAIN1
CNAIN2
CNAIN3
3.コネクタの配置図
3.4 DIO8基板のコネクタ
3.4 DIO8基板のコネクタ
DIO8基板はメインユニットのスロット挿入位置により基板番号が定まります。
DIO8 NO.1
DIO8 NO.2
DIO8 NO.3
CNB1
CNB2
CNB3
DIO8基板
メインユニット
3.5 PSU10(DC24V電源ユニット)のコネクタ
ON/OFF
FG
DCOUT
CNA1
CNA4
CNA7
AC(L)
AC(N)
5-11
CNA2
CNA5
CNA8
第5章 SENTROL 300/350のハードウェア
3.6 SID3基板のコネクタ及びヒューズ
SID3
メインユニット
NCR1
CNML
CNAOUT
CNS1
CNAIN1
SID3基板
ヒューズ及び予備ヒューズ
CNR1, CNS1, CNAIN1コネクタはEPS8基板 NO.1と同じです。
CNS1 コネクタ使用モード及びフォトカップラー挿入位置
CNS1,2,3 モード
スピンドルの
DO出力が
エミッタ─コモン
フォトカップラーの挿入位置
該当スピンドル
FANUC S シリーズ
PC13,14,15
FUJI 5000M3
⇨
FUJI 5000MS3
MITSUBISHI
ピンドルのDO出力が
コレクタコモン
PC16,17,18
⇨
SG-J, SF,
MDS-A-SPA, SPJA
YASKAWA VS626VM3
CNS1を
SERVO軸として
PC20,21,22
⇨
使用
5-12
3.コネクタの配置図
3.7 SPS8基板のヒューズ
3.7 SPS8基板のヒューズ
メインユニット
PSP8基板
予備ヒューズ及びヒューズ
3.8 DIO4基板のコネクタ及びヒューズ(参考)
状態表示LED
CNI01 (入出力 DIO4)
CNI02 (入出力 DIO4)
内部電源電圧チェック用コネクタ
電源状態表示LED
CNP1 (DC24V電源入力、MOLEX コネクタ)
SENTROL 303/353 メインユニット
ヒューズ
DIO4基板
5-13
第5章 SENTROL 300/350のハードウェア
4. 設置
4.1 設置環境の条件
1)周囲温度
運転時: 0℃~45℃
保管時:-20℃~60℃
2)湿度:75%以下 (結露状態であってはいけません。)
3)振動:運転時 0.5G以下
4)電源:DC24V± 10%,3A
SENTROL 300/350用電源ユニットである PSU10を使用することを推薦します。
DC24V AVRは容量75W以上のSMPS(スイッチング電源)を使用してください。
例)VSF75-24 メーカ:FINE SUNTRONIX
4.2 電源容量
100VA + サーボユニットの容量
サーボユニットの容量はモータの種類によって異なるので各サーボモータの仕様書
を参照して下さい。
4.3 強電盤(キャビネット)の設計条件
1)完全密閉構造
2)強電盤の内部温度上昇は外部温度と比べて+10℃以下になるように設計すること。
3)ファンを使って各ユニット表面に0.5m/sec程度の風が流れる様にすること。
注意)ただし、各ユニットに直接風が当たるようにすると、その部分に埃が積も
り故障の原因になる可能性があります。
4)ノイズ対策のために各ユニットはDC50V以下またはAC電源ケーブルから
100mm以上の間をおいて実装すること。
5)メインユニットの上・下部に100mm以上の空間が必要です。
強電盤(キャビネット)
100mm以上
メインユニット
100mm以上
4.4 各ユニットの発熱量
ユニット
発熱量
メインユニット
150W
DKU(SENTROL2用)
30W
DKU(PNC2用)
125W
4.5 間接冷却器の使用に関して
間接冷却器を必ず使用して下さい。間接冷却器はほこり、油、湿度などの悪環境条件
下においても、強電盤の外部と内部を遮断した状態で内部の熱を効果的に外部に排出す
るので、コントローラの安全な動作と信頼性を向上させます。
4.6 防塵対策
メインユニットやDKU(ディスプレイ/キーボードユニット)は、ほこりのある間環境
では絶縁低下が発生しやすいので強電盤のドアおよびケーブルの入り口をパッキングで
塞ぐこと。
5-14
4.設置
4. 7 ノイズ対策
4.7 ノイズ対策
1)信号線の分離
機械配線は下の表のように3グループで区別します。
グループAの配線とグループB,Cは分離して100mm以上の間隔で分離します。
グループ
A
B
C
配線内容
処
1次側 ACライン
2次側 ACライン
動力線
AC, DCモータ,サーボ/スピンドル
モータ動力線
ACソレノイド
ACリレー
DCソレノイド
DCリレー
メインユニット ~ スイッチ、ランプ、リレー
RIO1/RIO2基板 ~ スイッチ、LED
メインユニット ~ 24V AVR
RIO1/RIO2基板 ~ 24V AVR
メインユニット ~ サーボユニット
メインユニット ~ MPG
メインユニット ~ DKU
メインユニット ~ RS232C
メインユニット ~ RIO1/RIO2基板
置
グループB,Cと100mm以上分離するこ
と。
ソレノイド、リレーにはスパークキラーまた
はダイオードを付けること。
グループAと100mm以上分離すること。
ソレノイド、リレーにはスパークキラーまた
はダイオードを付けること。
グループAと100mm以上分離すること。
シールドケーブルの使用を推奨。
グループAと100mm以上分離すること。
シールドケーブルを使用し、シールドケーブ
ルのシールドをグランドに連結すること。
2)接地(アース)
イ) ユニットの接地
イ)ユニットの接地
強電盤(キャビネット)
(SENTROL300の場合)
PSU10
メインユニット
DC24V
AVR
サーボ
ユニット
FG
RIO1基板
RIO2基板
スピンドル
ユニット
サーボモータ
1.25(SQ)以上
スピンドルモータ
アースプレート
工場接地(グラウンド)
5-15
第5章 SENTROL 300/350のハードウェア
ロ)メインユニット強電盤(キャビネット)に確実に固定
M4ネジ
M4ネジ
M4ネジ
3)スパークキラー/ダイオード
リレー、MC(マグネットコンダクタ)、ソレノイドなどにはノイズ対策のため、その
コイル両端にスパークキラー/ダイオードを接続して下さい。
AC(交流)の場合はスパークキラー、DC(直流)の場合はダイオードを接続します。
イ)スパークキラー(交流回路に使用)
ACリレー
ACソレノイド
スパークキラー
ロ)ダイオード(直流回路に使用)
DCリレー
ダイオード
5-16
抵抗値(R):コイルの直流抵抗値相当
キャパシタ(C)
コイルの定常時の電流(A)
4.設置
4. 7 ノイズ対策
4)ケーブルのクランプ
メインユニットに接続するシールドケーブルは全て下図のように、アースプレートに
クランプして下さい。
このクランプはシールドケーブルを確実にグランド処理をするためのものです。
システムの安全な動作のために極めて重要な事項なので、必ず設置して下さい。
図に示したように、ケーブルの被服を一部分(40〜60mm)剥いてシールド外皮を露出さ
せ、この部分をクランプでアースプレートにしっかりと固定させます。
注意)クランプのネジを締め付けすぎるとシールドケーブルの芯線が損傷す
ることがあるので注意して下さい。
5-17
第5章 SENTROL 300/350のハードウェア
アースプレートの外見図
ケーブルクランプの外見図
5-18
4.設置
4. 7 ノイズ対策
5)コネクタのシールド処理
イ)3M コネクタの場合
シールドケーブルの外部の導体をコネクタのフレームに接続することで、コネ
クタを接続するとメインユニットのフレームグラウンドにつながります。
外部導体
外部導体
芯線
被服
被服
外部導体
グラウンドクランプ
で外部導体を被服と
の間に固定します。
コネクタシェルを組
み立てます。
5-19
第5章 SENTROL 300/350のハードウェア
ロ)フラットケーブル コネクタの場合
シールドケーブルの外部導体をコネクタの“FG”ピンに接続することで、コネ
クタを接続するとメインユニットのフレームグラウンドにつながります。
外部導体
外部導体
芯線
被服
コネクタ FG ピンに接続
外部導体
被服
CNIN : 2番ピン
CNOUT : 6,9番ピン
CNIO : 2番ピン
FG : FRAME GRAUND
ハ)Dサブ コネクタの場合
シールドケーブルの外部導体をコネクタの金属部に接続することでコネクタを
接続すると、メインユニットのフレームグラウンドにつながります。
外部導体
はんだ付け
コネクタの金属部
5-20
5.ユーザPCの仕様
5. ユーザPCの仕様
SENTROL 350はユーザPCとLANでつながっています。ユーザPCにインストールした
MPCのHMIソフトウェアを実行してNCの操作(制御、診断、セッティングなど)をします。
SENTROL 350は“WINDOWS XP/VISTA/7/8”が搭載されたPCで動作し、要求されるPCの
仕様は下図のようになります。
項目
仕様
OS
WINDOWS XP
WINDOWS VISTA
WINDOWS 7/8
CPU CLOCK
1㎓ 以上
2㎓ 以上
メインメモリ
512MByte 以上
1GByte 以上
ハードディスク空容量
1GByte 以上
1GByte 以上
SENTROL 350との通信
LANを使用
6. ユーザPC設置の注意点
(1)ユーザPCとSENTROL 350メインユニットを接続するLANケーブルは、シールドケー
ブルを使用します。
(2)ユーザPCのキーボード/マウスのケーブルの長さは 1m 以下にします。ノイズによる
通信問題(注1)が発生する場合は、ケーブルの両端にフェライトコアを取りつけて下
さい。
注1)キーボードのキーを押しても応答しないなどの問題
キーボード/マウスのケーブルはPCシステムの中で一番弱い部分です。ユーザPCを
設置するときにこの部分に対して注意します。
(3)PCのハードディスクは振動に対して弱いので、振動のある場所に設置するときは振
動対策をします。
(4)PCはCPU, グラフィックLSI, ハードディスクなど内部に熱を多く発生する部品が多
くあります。
PCの冷却方法は基本的に空冷なのでPC本体で空気を吸引/排出する穴を塞がないで
下さい。
PC内部温度が上昇すると予想外の問題が発生する可能性があります。
(異常終了、異常表示、通信エラー、データセーブ失敗、などなど)
5-21
1.診断画面を見る方法
第 6 章 自己診断
1. "診断"画面を見る方法
機械の入出力信号および内部データの状態を表示します。この画面にはまた4通りのメ
ニューがあり、その内容は次のようになります。
一般:NC内部の各データ値と信号のオン/オフ状態を表示します。
集計:NC稼動時間の集計結果を表示します。
特殊:機械メーカの保守用データを表示できます。
PLC:
タイマ :PLC内部のタイマの設定値を表示、設定します。
カウンタ :PLC内部のカウンタの設定値および現在値を表示、設定します。
キープリレー :PLC内部のキープリレーのデータを表示、設定します。
データテーブル:データテーブルのデータを表示、設定します。
PLC診断 :PLC内部の各信号のオン/オフ状態を表示します。
ラダー :ラダーを表示し、各リレーとコイルのダイナミック表示・検索をします。
モニタ :機械入出力信号の状態をチェックするときに使用します。
診断画面のメニュー構成は次のようになります。
① NC診断
画面メニュー
各NC診断画面の選択
各NC診断画面により
機能メニューが表示されます。
PLC画面を選択
② 選択中のPLC
画面メニュー
各PLC画面により機能メニュー
が表示されます。
③ PLC
選択メニュー
②メニューへ
④ NC診断画面
選択メニュー
PLC RAM運転時に使用します。
(パラメータ2001番 RAM=1, SQC=1 ①メニューへ
のとき表示されます。)
6-1
第6章 自己診断
2. PLC診断
2.1 PLC信号リスト1(アドレス番号順)
注意事項)
SENTROL 300/350
アドレス
G00
G01
G02
G03
G04
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
軸数
1〜16軸
スピンドル数
〜 4
信号名
説 明
*IT
*CSL
UNIT
SKIP1
*ESP
*SP
RRW
ERS
*AIT
*BSL
AE1
AE2
AE3
SKIP2
SKIP3
SKIP4
全軸インタロック信号
切削ブロック開始インタロック信号
マクロインタラプト信号
スキップ信号1
非常停止
自動運転休止信号
リセット&リワインド信号
外部リセット信号
自動運転全軸インタロック信号
ブロック開始インタロック信号
測定位置 到達信号1
測定位置 到達信号2
測定位置 到達信号3
スキップ信号2
スキップ信号3
スキップ信号4
BUZ
ブザー要求信号
FDOR3
AXSALF
SLA
ZRN
H
J
D
T
MEM
EDT
NET
AFL
DRN
BDTI
SBK
OVC
ABS
指定オーバライド3倍信号
軸アラームキャンセル信号
ストアードストロークリミット1選択信号
原点復帰モード選択信号
手動ハンドル送り選択信号
手動連続送り選択信号
手動データ入力信号
テープ指令選択信号
メモリ指令選択信号
テープ記憶編集選択信号
ネットワークモード選択信号
補助機能ロック信号
ドライラン信号
オプショナルブロックスキップ信号
シグナルブロック信号
オーバライドキャンセル信号
アブソリュート変換信号
MLK
マシンロック信号
6-2
2.PLC診断
2.1 PLC信号リスト
アドレス
G05
G06
G07
G08
G09
G10
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
ST
FIN
自動運転起動信号
完了信号
KEY1
KEY2
KEY3
KEY4
SCMP
M01
MP1
MP2
MP4
ROV1
ROV2
RT
BD12
BD13
BD14
BD15
BD16
BD17
BD18
BD19
*CHF
メモリ保護キー1
メモリ保護キー2
メモリ保護キー3
メモリ保護キー4
スピンドルクランプ
M01有効/無効
手動ハンドル送り移動量選択1
手動ハンドル送り移動量選択2
ステップフィード倍率設定
早送り速度選択1
早送り速度選択2
手動早送り選択信号
オプショナルブロックスキップ2信号
オプショナルブロックスキップ3信号
オプショナルブロックスキップ4信号
オプショナルブロックスキップ5信号
オプショナルブロックスキップ6信号
オプショナルブロックスキップ7信号
オプショナルブロックスキップ8信号
オプショナルブロックスキップ9信号
チャンファリング信号
TLMI
MRET
工具長測定モード選択信号
測定値入力信号
ADCENG
RVS
XYCHG
TL01
TL02
TL04
TL08
TL16
TL32
TL64
TLSKP
HS3A
HS3B
HS3C
HS3D
HS1E
HS2E
HS3E
TLRST
エッジ自動減速無効要求信号
逆行信号(SENTROL 300/350-C)
X、Y軸転換選択信号
工具グループ番号信号
工具グループ番号信号
工具グループ番号信号
工具グループ番号信号
工具グループ番号信号
工具グループ番号信号
工具グループ番号信号
工具スキップ信号
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
手動ハンドル送り軸選択(MPG
工具交換リセット信号
6-3
#3)
#3)
#3)
#3)
#1)
#2)
#3)
第6章 自己診断
アドレス
G11
G12
G13
G14
G15
G16
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
HS1A
HS1B
HS1C
HS1D
HS2A
HS2B
HS2C
HS2D
*FV0
*FV1
*FV2
*FV3
*FV4
*FV5
*FV6
*FV7
*JFV0
*JFV1
*JFV2
*JFV3
*JFV4
*JFV5
*JFV6
*JFV7
*JFV8
*JFV9
*JFV10
*JFV11
*JFV12
*JFV13
*JFV14
*JFV15
*JV0
*JV1
*JV2
*JV3
*JV4
*JV5
*JV6
*JV7
SYNC9
SYNC10
SYNC11
SYNC12
SYNC13
SYNC14
SYNC15
SYNC16
説 明
手動ハンドル送り軸選択(MPG #1)
手動ハンドル送り軸選択(MPG #1)
手動ハンドル送り軸選択(MPG #1)
手動ハンドル送り軸選択(MPG #1)
手動ハンドル送り軸選択(MPG #2)
手動ハンドル送り軸選択(MPG #2)
手動ハンドル送り軸選択(MPG #2)
手動ハンドル送り軸選択(MPG #2)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
送り速度オーバライド(自動、MDI、DNCモード)
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
軸別オーバライド型JOG送り機能
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
手動送り速度オーバライド
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
6-4
2.PLC診断
2.1 PLC信号リスト
アドレス
G17
G18
G19
G20
G21
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
SYNC1
SYNC2
SYNC3
SYNC4
SYNC5
SYNC6
SYNC7
SYNC8
SOVR0
SOVR1
SOVR2
SOVR3
SOVR4
SOVR5
SOVR6
SOVR7
WN1
WN2
WN4
WN8
WN16
WN32
WN64
WN128
RI300
RI301
RI302
RI303
RI304
RI305
RI306
RI307
RI308
RI309
RI310
RI311
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
同期制御選択信号
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
主軸オーバライド入力
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
外部ワーク番号サーチ
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
RISGN3
主軸モータ速度指令信号
6-5
第6章 自己診断
アドレス
G22
G23
G24
G25
G26
G27
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
RI400
RI401
RI402
RI403
RI404
RI405
RI406
RI407
RI408
RI409
RI410
RI411
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
RISGN4
RI100
RI101
RI102
RI103
RI104
RI105
RI106
RI107
RI108
RI109
RI110
RI111
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
RISGN1
RI200
RI201
RI202
RI203
RI204
RI205
RI206
RI207
RI208
RI209
RI210
RI211
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
主軸モータ速度指令信号
RISGN2
主軸モータ速度指令信号
6-6
2.PLC診断
2.1 PLC信号リスト
アドレス
G28
G29
G30
G31
G32
G33
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
RGTMD3
リジット選択信号
RDY3
ALMR3
準備完了
アラームリセット
HSP3
高速タップ信号
*ESP3
CRSRV3
CRSFR3
ORCM3
非常停止
逆回転指令
正回転指令
オリエント指令
RGTMD4
リジット選択信号
RDY4
ALMR4
準備完了
アラームリセット
HSP4
高速タップ信号
*ESP4
CRSRV4
CRSFR4
ORCM4
EXPUN
EXRD
EXSTP
非常停止
逆回転指令
正回転指令
オリエント指令
外部パンチ開始信号
外部リード開始信号
外部リード/パンチ停止信号
EOREND
ERDRQ
EISTB
EIA0
EIA1
EIA2
EIA3
EIA4
EIA5
EIA6
EIA7
外部データ出力用リード完了信号
外部データ出力要求信号
外部データ入力用ストローブ信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
外部データ入力用アドレス信号
6-7
第6章 自己診断
アドレス
G34
G35
G36
G37
G38
G39
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
EID0
EID1
EID2
EID3
EID4
EID5
EID6
EID7
EID8
EID9
EID10
EID11
EID12
EID13
EID14
EID15
EID16
EID17
EID18
EID19
EID20
EID21
EID22
EID23
EID24
EID25
EID26
EID27
EID28
EID29
EID30
EID31
EID32
EID33
EID34
EID35
EID36
EID37
EID38
EID39
EID40
EID41
EID42
EID43
EID44
EID45
EID46
EID47
説 明
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
外部データ入力用データ信号
6-8
2.PLC診断
2.1 PLC信号リスト
アドレス
G40
G41
G42
G43
G44
G45
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
RPB8
RPB9
RPB10
RPB11
RPB12
RPB13
RPB14
RPB15
RPB0
RPB1
RPB2
RPB3
RPB4
RPB5
RPB6
RPB7
RTG10
RTG11
RGTMD1
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
リジットタッピングギア選択信号
リジットタッピングギア選択信号
スピンドル(1st) リジット選択信号
RDY1
ALMR1
スピンドル(1st) 準備完了
スピンドル(1st) アラームリセット
HSP3
スピンドル(1st) 高速タップ信号
*ESP3
CRSRV3
CRSFR3
ORCM3
RPB16
RPB17
RPB18
RPB19
RPB20
RPB21
RPB22
RPB23
スピンドル(1st) 非常停止
スピンドル(1st) 逆回転指令
スピンドル(1st) 正回転指令
スピンドル(1st) オリエント指令
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
ソフトウェア操作盤汎用スイッチ応答信号
RGTMD2
スピンドル(2nd) リジット選択信号
RDY2
ALMR2
スピンドル(2nd) 準備完了
スピンドル(2nd) アラームリセット
6-9
第6章 自己診断
アドレス
G46
G47
G48
G49
G50
G51
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
HSP2
スピンドル(2nd) 高速タップ信号
*ESP2
CRSRV2
CRSFR2
ORCM2
TRMOD
NOMCL2
NOMCL3
EDTBL
スピンドル(2nd) 非常停止
スピンドル(2nd) 逆回転指令
スピンドル(2nd) 正回転指令
スピンドル(2nd) オリエント指令
トレーシング機能稼動(レーザ加工用)
ノミナルクリアランス2設定(レーザ加工用)
ノミナルクリアランス3設定(レーザ加工用)
エッジパワーコントロール機能出力転換信号
MRKMD
UI000
UI001
UI002
UI003
UI004
UI005
UI006
UI007
UI008
UI009
UI010
UI011
UI012
UI013
UI014
UI015
UI016
UI017
UI018
UI019
UI020
UI021
UI022
UI023
UI024
UI025
UI026
UI027
UI028
UI029
UI030
UI031
マーキングモードON信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
6-10
2.PLC診断
2.1 PLC信号リスト
アドレス
G52
G53
G54
G55
G56
G57
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
UI100
UI101
UI102
UI103
UI104
UI105
UI106
UI107
UI108
UI109
UI110
UI111
UI112
UI113
UI114
UI115
UI116
UI117
UI118
UI119
UI120
UI121
UI122
UI123
UI124
UI125
UI126
UI127
UI128
UI129
UI130
UI131
UI200
UI201
UI202
UI203
UI204
UI205
UI206
UI207
UI208
UI209
UI210
UI211
UI212
UI213
UI214
UI215
説 明
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
6-11
第6章 自己診断
アドレス
G58
G59
G60
G61
G62
G63
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
UI216
UI217
UI218
UI219
UI220
UI221
UI222
UI223
UI224
UI225
UI226
UI227
UI228
UI229
UI230
UI231
UI300
UI301
UI302
UI303
UI304
UI305
UI306
UI307
UI308
UI309
UI310
UI311
UI312
UI313
UI314
UI315
UI316
UI317
UI318
UI319
UI320
UI321
UI322
UI323
UI324
UI325
UI326
UI327
UI328
UI329
UI330
UI331
説 明
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
カスタムマクロ用入力信号
6-12
2.PLC診断
2.1 PLC信号リスト
アドレス
G64
G65
G66
G67
G68
G69
ビット
信号名
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
*+L1
*-L1
ENBOUT1
オーバトラベル信号
オーバトラベル信号
サーボOFF イネーブル維持信号
説 明
*IT1
HINT1
*SVF1
VL10N1
+J
-J
MI1
MLK1
ADEC1
PCAX1
+MIT1
-MIT1
EOR00
EOR01
EOR02
EOR03
EOR04
EOR05
EOR06
EOR07
EC00
EC01
EC02
EMSBK1
ESBK1
ESTP1
ECLR1
EBUF1
EIF000
EIF001
EIF002
EIF003
EIF004
EIF005
EIF006
EIF007
EIF008
EIF009
EIF010
EIF011
EIF012
EIF013
EIF014
EIF015
軸別インタロック信号
第1軸ハンドルインタラプト許可
サーボオフ信号
速度指令単位10倍機能使用信号
送り軸、方向選択信号
送り軸、方向選択信号
ミラーイメージ信号
マシンロック信号
自動原点復帰
PLC制御軸入力信号
オフセット量測定値
オフセット量測定値
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
PLC制御軸の切削速度オーバライド
軸制御指令
軸制御指令
軸制御指令
ブロック停止禁止信号
ブロック停止信号
軸制御一時停止信号
リセット信号
軸制御指令送出信号
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
切削送り速度、主軸速度
6-13
第6章 自己診断
アドレス
G70
G71
G72
G73
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
ED000
ED001
ED002
ED003
ED004
ED005
ED006
ED007
ED008
ED009
ED010
ED011
ED012
ED013
ED014
ED015
ED016
ED017
ED018
ED019
ED020
ED021
ED022
ED023
ED024
ED025
ED026
ED027
ED028
ED029
ED030
ED031
説 明
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
軸移動量、ドウェル時間、主軸方向
以下G64~G73(第1軸)と同じです
(G74~G83) 第2軸 (G144~G153)第9軸 (G84~G83) 第3軸 (G154~G163)第10軸 (G94~G83) 第4軸 (G164~G173)第11軸 (G104~G83)第5軸 (G174~G183)第12軸 (G114~G83)第6軸 (G184~G193)第13軸 (G124~G83)第7軸 (G194~G203)第14軸 (G134~G83)第8軸 (G204~G213)第15軸 (G214~G223)第16軸 注意事項)
軸数
1〜16軸
SENTROL 300/350
6-14
2.PLC診断
2.1 PLC信号リスト
アドレス
G224
G225
G226
G227
G228
G229
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
HSF00
HSF01
HSF02
HSF03
HSF04
HSF05
HSF06
HSF07
HSF08
HSF09
HSF10
HSF11
HSF12
HSF13
HSF14
HSF15
HSF16
HSF17
HSF18
HSF19
HSF20
HSF21
HSF22
HSF23
HSF24
HSF25
HSF26
HSF27
HSF28
HSF29
HSF30
HSFON
ZRN11
ZRN12
ZRN13
ZRN14
ZRN21
ZRN22
ZRN23
ZRN24
ZRN31
ZRN32
ZRN33
ZRN34
ZRN41
ZRN42
ZRN43
ZRN44
説 明
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
ハンドルフィードステップデータ
第1軸 第1原点復帰
第1軸 第2原点復帰
第1軸 第3原点復帰
第1軸 第4原点復帰
第2軸 第1原点復帰
第2軸 第2原点復帰
第2軸 第3原点復帰
第2軸 第4原点復帰
第3軸 第1原点復帰
第3軸 第2原点復帰
第3軸 第3原点復帰
第3軸 第4原点復帰
第4軸 第1原点復帰
第4軸 第2原点復帰
第4軸 第3原点復帰
第4軸 第4原点復帰
6-15
第6章 自己診断
アドレス
G230
G231
G232
G233
G234
G235
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
ZRN51
ZRN52
ZRN53
ZRN54
ZRN61
ZRN62
ZRN63
ZRN64
ZRN71
ZRN72
ZRN73
ZRN74
ZRN81
ZRN82
ZRN83
ZRN84
ZRN91
ZRN92
ZRN93
ZRN94
ZRNA1
ZRNA2
ZRNA3
ZRNA4
ZRNB1
ZRNB2
ZRNB3
ZRNB4
ZRNC1
ZRNC2
ZRNC3
ZRNC4
ZRND1
ZRND2
ZRND3
ZRND4
ZRNE1
ZRNE2
ZRNE3
ZRNE4
ZRNF1
ZRNF2
ZRNF3
ZRNF4
ZRNG1
ZRNG2
ZRNG3
ZRNG4
説 明
第5軸 第1原点復帰
第5軸 第2原点復帰
第5軸 第3原点復帰
第5軸 第4原点復帰
第6軸 第1原点復帰
第6軸 第2原点復帰
第6軸 第3原点復帰
第6軸 第4原点復帰
第7軸 第1原点復帰
第7軸 第2原点復帰
第7軸 第3原点復帰
第7軸 第4原点復帰
第8軸 第1原点復帰
第8軸 第2原点復帰
第8軸 第3原点復帰
第8軸 第4原点復帰
第9軸 第1原点復帰
第9軸 第2原点復帰
第9軸 第3原点復帰
第9軸 第4原点復帰
第10軸 第1原点復帰
第10軸 第2原点復帰
第10軸 第3原点復帰
第10軸 第4原点復帰
第11軸 第1原点復帰
第11軸 第2原点復帰
第11軸 第3原点復帰
第11軸 第4原点復帰
第12軸 第1原点復帰
第12軸 第2原点復帰
第12軸 第3原点復帰
第12軸 第4原点復帰
第13軸 第1原点復帰
第13軸 第2原点復帰
第13軸 第3原点復帰
第13軸 第4原点復帰
第14軸 第1原点復帰
第14軸 第2原点復帰
第14軸 第3原点復帰
第14軸 第4原点復帰
第15軸 第1原点復帰
第15軸 第2原点復帰
第15軸 第3原点復帰
第15軸 第4原点復帰
第16軸 第1原点復帰
第16軸 第2原点復帰
第16軸 第3原点復帰
第16軸 第4原点復帰
6-16
2.PLC診断
2.1 PLC信号リスト
アドレス
G236
G237
G238
G239
G240
G241
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
PATCR
PATUP
PATDWN
ASET
MSET
加工設定外部リターンキー
加工設定外部カーソルアップキー
加工設定外部カーソルダウンキー
自動系モード加工設定表示番号設定
手動系モード加工設定表示番号設定
PATSCR
ADRCAN
PAT*1
PAT*2
PAT*4
PAT*8
PAT*16
PAT*32
PAT*64
加工条件設定表示画面選択信号
刃先方向制御実行取消し信号
加工設定表示番号設定 *1
加工設定表示番号設定 *2
加工設定表示番号設定 *4
加工設定表示番号設定 *8
加工設定表示番号設定 *16
加工設定表示番号設定 *32
加工設定表示番号設定 *64
JGPS01
JGPS02
JGPS03
JGPS04
JGPS05
JGPS06
JGPS07
JGPS08
JGPS09
JGPS10
JGPS11
JGPS12
JGPS13
JGPS14
JGPS15
JGPS16
CAL101
CAL102
CAL103
CAL104
CAL105
CAL106
CAL107
CAL108
CAL109
CAL110
CAL111
CAL112
CAL113
CAL114
CAL115
CAL116
機械座標値指定JOG早送り移動 第1軸移動
機械座標値指定JOG早送り移動 第2軸移動
機械座標値指定JOG早送り移動 第3軸移動
機械座標値指定JOG早送り移動 第4軸移動
機械座標値指定JOG早送り移動 第5軸移動
機械座標値指定JOG早送り移動 第6軸移動
機械座標値指定JOG早送り移動 第7軸移動
機械座標値指定JOG早送り移動 第8軸移動
機械座標値指定JOG早送り移動 第9軸移動
機械座標値指定JOG早送り移動 第10軸移動
機械座標値指定JOG早送り移動 第11軸移動
機械座標値指定JOG早送り移動 第12軸移動
機械座標値指定JOG早送り移動 第13軸移動
機械座標値指定JOG早送り移動 第14軸移動
機械座標値指定JOG早送り移動 第15軸移動
機械座標値指定JOG早送り移動 第16軸移動
O9700 ライン1 テキスト計算実行
O9700 ライン2 テキスト計算実行
O9700 ライン3 テキスト計算実行
O9700 ライン4 テキスト計算実行
O9700 ライン5 テキスト計算実行
O9700 ライン6 テキスト計算実行
O9700 ライン7 テキスト計算実行
O9700 ライン8 テキスト計算実行
O9700 ライン9 テキスト計算実行
O9700 ライン10 テキスト計算実行
O9700 ライン11 テキスト計算実行
O9700 ライン12 テキスト計算実行
O9700 ライン13 テキスト計算実行
O9700 ライン14 テキスト計算実行
O9700 ライン15 テキスト計算実行
O9700 ライン16 テキスト計算実行
6-17
第6章 自己診断
アドレス
G242
G243
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
CAL201
CAL202
CAL203
CAL204
CAL205
CAL206
CAL207
CAL208
CAL209
CAL210
CAL211
CAL212
CAL213
CAL214
CAL215
CAL216
説 明
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
O9701
ライン1 テキスト計算実行
ライン2 テキスト計算実行
ライン3 テキスト計算実行
ライン4 テキスト計算実行
ライン5 テキスト計算実行
ライン6 テキスト計算実行
ライン7 テキスト計算実行
ライン8 テキスト計算実行
ライン9 テキスト計算実行
ライン10 テキスト計算実行
ライン11 テキスト計算実行
ライン12 テキスト計算実行
ライン13 テキスト計算実行
ライン14 テキスト計算実行
ライン15 テキスト計算実行
ライン16 テキスト計算実行
以下 G240.0~G241.7(CAL101~116 O9700)
G242.0~G243.7(CAL201~216 O9701)と同じです。
G244.0~G245.7(CAL301~316 O9702)
G246.0~G247.7(CAL401~416 O9703)
G248.0~G249.7(CAL501~516 O9704)
G250.0~G251.7(CAL601~616 O9705)
G252.0~G253.7(CAL701~716 O9706)
G254.0~G255.7(CAL801~816 O9707)
アドレス
G256
G257
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
DSAVE
説 明
データセーブ機能セーブ実行信号
6-18
2.PLC診断
2.1 PLC信号リスト
アドレス
G258
G259
G260
G261
G262
G263
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
TRC1
TRC2
TRC3
TRC4
TRC5
TRC6
TRC7
TRC8
PTDMK
8チャンネルトレース機能
各軸トレーシングモード選択信号
RPDOVR
早送りオーバライド有効要求信号
GPCOFF
TCDSV
TCMDS
TCSTR
TCEND
PLBK1
PLBK2
PLBK3
PLBK4
PLBK5
研削機定研削力制御フィードオーバライド取消し信号
セフティゾーン機能ON信号
ティーチング画面選択要求信号
ティーチングスタート信号
ティーチングエンド信号
プレイバック(ティーチング)機能実行信号
プレイバック(ティーチング)機能実行信号
プレイバック(ティーチング)機能実行信号
プレイバック(ティーチング)機能実行信号
プレイバック(ティーチング)機能実行信号
PEQP8
GTBLN0
GTBLN1
GTBLN2
GTBLN3
プレイバック(ティーチング)機能実行信号
ゲインテーブル番号選択信号
ゲインテーブル番号選択信号
ゲインテーブル番号選択信号
ゲインテーブル番号選択信号
AS0
AS1
SHTCAN
移動目標位置座標系指定
移動目標位置座標系指定
回転軸最短距離機能取消し信号
PTNSCR
加工設定画面選択信号
G01NP2
早送り第2インポジション機能ON信号
トレーシング機能プラズマべべリングトレースデータ作成信号
6-19
第6章 自己診断
アドレス
G264
G265
G266
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
SRC1
SRC2
SRC3
SRC4
SRC5
SRC6
SRC7
SRC8
OSET1
OSET2
OSET3
OSET4
OSET5
OSET6
OSET7
OSET8
OSET9
OSETa
OSETb
OSETc
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLC画面指定信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
G92S0
DSET
PLCによる絶対座標ゼロセット実行信号
PLCによる絶対座標ゼロセット実行信号
6-20
2.PLC診断
2.1 PLC信号リスト
アドレス
F00
F01
F02
F03
F04
F05
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
PNCLAH
AL
RST
SPL
STL
OP
SA
MA
DEN
IPEN
DST
INCH
TAP
RPD
THRD
CSS
LAN接続確認信号
アラーム中信号
リセット中信号
自動運転休止中信号
自動運転稼動中信号
自動運転中信号
サーボ準備完了信号
制御装置完了信号
分配完了信号
分配完了信号
手動データ入力起動信号
インチ入力信号
タッピング中信号
早送り中信号
ねじ切削中信号
周速一定中信号
CUT
*ESPM
DSP
TLMO
ROTMV
切削中信号
非常停止
フィードホールドキー
工具長測定用出力信号
回転軸移動中状態出力信号
MZRN
MH
MJ
MD
MT
MMEM
MEDT
原点復帰モード通報信号
手動ハンドル送り選択確認信号
手動連続送り選択確認信号
手動データ入力選択確認信号
テープ指令選択確認信号
メモリ指令選択確認信号
テープ記憶編集選択確認信号
MAFL
MDRN
MBDT1
MSBK
MM01
MABS
補助機能ロック確認信号
ドライラン確認信号
オプショナルブロックスキップ1確認信号
シングルブロック確認信号
ソフトウェア操作盤M01スイッチ
アブソリュート変換確認信号
MMLK
MBDI2
MBDI3
MBDI4
MBDI5
MBDI6
MBDI7
MBDI8
MBDI9
マシンロック確認信号
オプショナルブロックスキップ2確認信号
オプショナルブロックスキップ3確認信号
オプショナルブロックスキップ4確認信号
オプショナルブロックスキップ5確認信号
オプショナルブロックスキップ6確認信号
オプショナルブロックスキップ7確認信号
オプショナルブロックスキップ8確認信号
オプショナルブロックスキップ9確認信号
6-21
第6章 自己診断
アドレス
F06
F07
F08
F09
F10
F11
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
PSALM
SVALM
OHALM
OTALM
SYALM
MFOC
MSOC
MKEY
EMGLS
EDTCHK
SMPON
RTAP
RPBSY
ESEND
TLCHA
TLCHB
MF
SF
TF
BF
プログラム誤操作アラーム
サーボアラーム
オーバヒートアラーム
オーバトラベルアラーム
制御装置異常アラーム
フィードオーバライドキャンセル
スピンドルオーバライドキャンセル
ソフトウェア操作盤保護キースイッチ
非常停止L/S オン
自動運転チェック信号(編集モード)
サーボメインパワーオン信号
リジッドモード状態信号
リード/パンチ中信号
外部サーチ完了信号
工具交換信号
工具交換信号
補助機能ストローブ信号
主軸機能ストローブ信号
工具機能ストローブ信号
第2補助機能ストローブ信号
MF2
MF3
MF4
DSP0
DSP1
DSP2
DSP3
DM00
DM01
DM02
DM30
RO00
RO01
RO02
RO03
RO04
RO05
RO06
RO07
RO08
RO09
RO10
RO11
RO12
RO13
RO14
RO15
補助機能ストローブ信号
補助機能ストローブ信号
補助機能ストローブ信号
画面選択確認信号
画面選択確認信号
画面選択確認信号
画面選択確認信号
デコードM信号(M00)
デコードM信号(M01)
デコードM信号(M02)
デコードM信号(M30)
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
指令主軸速度信号
6-22
2.PLC診断
2.1 PLC信号リスト
アドレス
F12
F13
F14
F15
F16
F17
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
AR00
AR01
AR02
AR03
AR04
AR05
AR06
AR07
AR08
AR09
AR10
AR11
AR12
AR13
AR14
AR15
MR00
MR01
MR02
MR03
MR04
MR05
MR06
MR07
MR08
MR09
MR10
MR11
MR12
MR13
MR14
MR15
M00
M01
M02
M03
M04
M05
M06
M07
M08
M09
M10
M11
M12
M13
M14
M15
説 明
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
実主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
最高主軸速度信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
6-23
第6章 自己診断
アドレス
F18
F19
F20
F21
F22
F23
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
M16
M17
M18
M19
M20
M21
M22
M23
M24
M25
M26
M27
M28
M29
M30
M31
S00
S01
S02
S03
S04
S05
S06
S07
S08
S09
S10
S11
S12
S13
S14
S15
S16
S17
S18
S19
S20
S21
S22
S23
S24
S25
S26
S27
S28
S29
S30
S31
説 明
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
補助機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
主軸機能コード信号
6-24
2.PLC診断
2.1 PLC信号リスト
アドレス
F24
F25
F26
F27
F28
F29
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
T00
T01
T02
T03
T04
T05
T06
T07
T08
T09
T10
T11
T12
T13
T14
T15
T16
T17
T18
T19
T20
T21
T22
T23
T24
T25
T26
T27
T28
T29
T30
T31
B00
B01
B02
B03
B04
B05
B06
B07
B08
B09
B10
B11
B12
B13
B14
B15
説 明
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
工具機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
6-25
第6章 自己診断
アドレス
F30
F31
F32
F33
F34
F35
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
B16
B17
B18
B19
B20
B21
B22
B23
B24
B25
B26
B27
B28
B29
B30
B31
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
第2補助機能コード信号
FAR
COLLIS
FAR状態
衝突状態
MMRKMD
EIREND
TRACT
EOSTB
EOA0
EOA1
EOA2
EOA3
EOA4
EOA5
EOA6
EOA7
EOD00
EOD01
EOD02
EOD03
EOD04
EOD05
EOD06
EOD07
EOD08
EOD09
EOD10
EOD11
EOD12
EOD13
EOD14
EOD15
マーキングモード確認信号
外部データ入力用リード完了信号
トレース機能ノミナルクリアレンス状態信号
外部データ出力用ストローブ信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用アドレス信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
6-26
2.PLC診断
2.1 PLC信号リスト
アドレス
F36
F37
F38
F39
F40
F41
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
EOD16
EOD17
EOD18
EOD19
EOD20
EOD21
EOD22
EOD23
EOD24
EOD25
EOD26
EOD27
EOD28
EOD29
EOD30
EOD31
EOD32
EOD33
EOD34
EOD35
EOD36
EOD37
EOD38
EOD39
EOD40
EOD41
EOD42
EOD43
EOD44
EOD45
EOD46
EOD47
SOR0
SOR1
SOR2
SOR3
SOR4
SOR5
SOR6
SOR7
SQSPD2
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
外部データ出力用データ信号
主軸オーバライド
主軸オーバライド
主軸オーバライド
主軸オーバライド
主軸オーバライド
主軸オーバライド
主軸オーバライド
主軸オーバライド
スピンドル(2nd) 0スピード信号
ORAR2
*SPAL2
SST2
SARM2
スピンドル(2nd)
スピンドル(2nd)
スピンドル(2nd)
スピンドル(2nd)
6-27
オリエント完了信号
スピンドル故障信号
ゼロ速度信号
速度到達信号
第6章 自己診断
アドレス
F42
F43
F44
F45
F46
F47
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
PB08
PB09
PB10
PB11
PB12
PB13
PB14
PB15
PB00
PB01
PB02
PB03
PB04
PB05
PB06
PB07
SQSPD1
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
スピンドル(1st) 0スピード信号
ORAR1
*SPAL1
SST1
SARM1
PB16
PB17
PB18
PB19
PB20
PB21
PB22
PB23
RAFL
RDRN
RBDT1
RSBK
RM01
RABS
ROVC
RMLK
RCLMA
SUCLP
SCLP
スピンドル(1st) オリエント完了信号
スピンドル(1st) スピンドル故障信号
スピンドル(1st) ゼロ速度信号
スピンドル(1st) 速度到達信号
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
ソフトウェア操作盤汎用スイッチ
補助機能ロック要求
ドライラン要求
オプショナルブロックスキップ要求
シングルブロック要求
M01要求
マニュアルアブソリュート要求
フィードオーバライドキャンセル要求
マシンロック要求
ソフトウェア操作盤要求出力信号
主軸アンクランプ要求信号
主軸クランプ要求信号
RCHIP
ソフトウェア操作盤要求出力信号
RCLCA
ソフトウェア操作盤要求出力信号
6-28
2.PLC診断
2.1 PLC信号リスト
アドレス
F48
F49
F50
F51
F52
F53
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
UO000
UO001
UO002
UO003
UO004
UO005
UO006
UO007
UO008
UO009
UO010
UO011
UO012
UO013
UO014
UO015
UO016
UO017
UO018
UO019
UO020
UO021
UO022
UO023
UO024
UO025
UO026
UO027
UO028
UO029
UO030
UO031
UO100
UO101
UO102
UO103
UO104
UO105
UO106
UO107
UO108
UO109
UO110
UO111
UO112
UO113
UO114
UO115
説 明
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
6-29
第6章 自己診断
アドレス
F54
F55
F56
F57
F58
F59
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
UO116
UO117
UO118
UO119
UO120
UO121
UO122
UO123
UO124
UO125
UO126
UO127
UO128
UO129
UO130
UO131
UO200
UO201
UO202
UO203
UO204
UO205
UO206
UO207
UO208
UO209
UO210
UO211
UO212
UO213
UO214
UO215
UO216
UO217
UO218
UO219
UO220
UO221
UO222
UO223
UO224
UO225
UO226
UO227
UO228
UO229
UO230
UO231
説 明
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
6-30
2.PLC診断
2.1 PLC信号リスト
アドレス
F60
F61
F62
F63
F64
F65
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
UO300
UO301
UO302
UO303
UO304
UO305
UO306
UO307
UO308
UO309
UO310
UO311
UO312
UO313
UO314
UO315
UO316
UO317
UO318
UO319
UO320
UO321
UO322
UO323
UO324
UO325
UO326
UO327
UO328
UO329
UO330
UO331
ZP1
ZP21
MV1
MD1
ZP31
ZP41
INP1
*ENB1
MMI1
ZPLS1
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
カスタムマクロ用出力信号
第1軸リファレンス点復帰完了信号
第1軸第2リファレンス点復帰完了信号
第1軸軸移動中信号
第1軸移動方向信号
第1軸第3リファレンス点復帰完了信号
第1軸第4リファレンス点復帰完了信号
第1軸インポジション信号
第1軸サーボオフ確認信号
第1軸ミラーイメージ確認信号
第1軸エンコーダ Zパルス確認信号
RPRF1
第1軸リファレンス点 復帰完了信号
6-31
第6章 自己診断
アドレス
F66
F68
F69
F70
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
EIAL1
第1軸アラーム信号
EOTP1
EOTN1
EBSY1
ZP2
ZP22
MV2
MD2
ZP32
ZP42
INP2
*ENB2
MMI2
ZPLS2
第1軸オーバトラベルプラス方向信号
第1軸オーバトラベルマイナス方向信号
第1軸軸制御指令読み取り信号
第2軸リファレンス点復帰完了信号
第2軸第2リファレンス点復帰完了信号
第2軸軸移動中信号
第2軸移動方向信号
第2軸第3リファレンス点復帰完了信号
第2軸第4リファレンス点復帰完了信号
第2軸インポジション信号
第2軸サーボオフ確認信号
第2軸ミラーイメージ確認信号
第2軸エンコーダ Zパルス確認信号
RPRF2
第2軸リファレンス点 復帰完了信号
EIAL2
第2軸アラーム信号
EOTP2
EOTN2
EBSY2
第2軸オーバトラベルプラス方向信号
第2軸オーバトラベルマイナス方向信号
第2軸軸制御指令読み取り信号
以下 F64~F67(第1軸)、F68~F71(第2軸)と同じです。
(F72~F75)第3軸、 (F76~F79)第4軸、
(F80~F83)第5軸、 (F84~F87)第6軸、
(F88~F91)第7軸、 (F92~F95)第8軸、
(F96~F99)第9軸、 (F100~F103)第10軸、
(F104~F107)第11軸、(F108~F111)第12軸、
(F112~F115)第13軸、(F116~F119)第14軸、
(F120~F123)第15軸、(F124~F127)第16軸
6-32
2.PLC診断
2.1 PLC信号リスト
アドレス
F128
F129
F130
F131
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
ORAR3
*SPAL3
SST3
SARM3
オリエント完了信号3
スピンドル故障信号3
ゼロ速度信号3
速度到達信号3
ORAR4
*SPAL4
SST4
SARM4
ANLG10
ANLG11
ANLG12
ANLG13
ANLG14
ANLG15
ANLG16
ANLG17
ANLG18
ANLG19
ANLG1A
ANLG1B
オリエント完了信号4
スピンドル故障信号4
ゼロ速度信号4
速度到達信号4
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
アナログデータ入力信号
以下 F130.0~F131.3(ALNG10~1B
F132.0~F133.3(ALNG20~2B
F134.0~F135.3(ALNG30~3B
F136.0~F137.3(ALNG40~4B
F138.0~F139.3(ALNG50~5B
F140.0~F141.3(ALNG60~6B
F142.0~F143.3(ALNG70~7B
F144.0~F145.3(ALNG80~8B
6-33
チャンネル1)と同じです
チャンネル2)
チャンネル3)
チャンネル4)
チャンネル5)
チャンネル6)
チャンネル7)
チャンネル8)
第6章 自己診断
アドレス
F146
F147
F148
F149
F150
F151
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
JGFN01
JGFN02
JGFN03
JGFN04
JGFN05
JGFN06
JGFN07
JGFN08
JGFN09
JGFN10
JGFN11
JGFN12
JGFN13
JGFN14
JGFN15
JGFN16
PT_A1
PT_A2
PT_A3
PT_A4
PT_A5
PT_A6
PT_A7
PT_A8
PT_M1
PT_M2
PT_M3
PT_M4
PT_M5
PT_M6
PT_M7
PT_M8
KEYF01
KEYF02
KEYF03
KEYF04
KEYF05
KEYF06
KEYF07
KEYF08
KEYF09
KEYF10
KEYF11
KEYF12
S_MENU
機械座標値指定JOG早送り移動第1軸移動完了
機械座標値指定JOG早送り移動第2軸移動完了
機械座標値指定JOG早送り移動第3軸移動完了
機械座標値指定JOG早送り移動第4軸移動完了
機械座標値指定JOG早送り移動第5軸移動完了
機械座標値指定JOG早送り移動第6軸移動完了
機械座標値指定JOG早送り移動第7軸移動完了
機械座標値指定JOG早送り移動第8軸移動完了
機械座標値指定JOG早送り移動第9軸移動完了
機械座標値指定JOG早送り移動第10軸移動完了
機械座標値指定JOG早送り移動第11軸移動完了
機械座標値指定JOG早送り移動第12軸移動完了
機械座標値指定JOG早送り移動第13軸移動完了
機械座標値指定JOG早送り移動第14軸移動完了
機械座標値指定JOG早送り移動第15軸移動完了
機械座標値指定JOG早送り移動第16軸移動完了
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
自動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
手動系モード現在表示加工設定番号
F1キー入力確認
F2キー入力確認
F3キー入力確認
F4キー入力確認
F5キー入力確認
F6キー入力確認
F7キー入力確認
F8キー入力確認
F9キー入力確認
F10キー入力確認
F11キー入力確認
F12キー入力確認
画面/選択メニュー表示信号
PDATLD
加工設定データロード確認信号
6-34
2.PLC診断
2.1 PLC信号リスト
アドレス
F152
F153
F154
F155
F156
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
RPRV
RXYCHG
RMIRY
RMIRX
RPHCAN
RPRHT
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
MVST
MVPS
P_STOP
P_CAN
RTCFL
RETFL
AFDWN
MACCL
RKY1
RKY2
RKY3
RKY4
RKY5
RKY6
RKY7
RKY8
RKY9
RKY0
ガス切断機 画面状態出力信号出発位置
ガス切断機 画面状態出力信号再決定位置
ガス切断機 画面状態出力信号停止
ガス切断機 画面状態出力信号完了、取消し
ガス切断機 逆行、再順行確認信号
ガス切断機 リターン機能稼働中信号
ガス切断機 フィードダウン信号
ガス切断機 加減速中信号
数字キー “1”ON状態出力信号
数字キー “2”ON状態出力信号
数字キー “3”ON状態出力信号
数字キー “4”ON状態出力信号
数字キー “5”ON状態出力信号
数字キー “6”ON状態出力信号
数字キー “7”ON状態出力信号
数字キー “8”ON状態出力信号
数字キー “9”ON状態出力信号
数字キー “0”ON状態出力信号
RTCM1
RTCM2
PTDSCR
ALNSCR
ガス切断機 逆行/順行モード選択信号
ガス切断機 逆行/順行モード選択信号
ガス切断画面状態出力信号加工設定画面表示
ガス切断画面状態出力信号定熱画面表示
RTCMD
ティーチング画面選択確認信号
6-35
原点リバースPBオン
X、Y軸交換PBオン
Y軸ミラーイメージ要求PB ON
X軸ミラーイメージ要求PB ON
予熱取消し要求PB ON
予熱延長要求PB ON
第6章 自己診断
アドレス
F157
F158
F159
F160
F161
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
説 明
DSFIN
データセーブ機能セーブ実行リターン信号(セーブ正常終了)
DSER1
DSER2
データセーブ機能セーブ実行リターン信号(データ指定エラー)
データセーブ機能セーブ実行リターン信号(ファイル操作ラー)
PRERIN
PLWTING
M_G23R
ブロック終了前出力信号
プレイバックテキスト挿入中信号
指定未到達曲線信号
PWSW1
PWSW2
PWSW3
PWSW4
PWSW5
PWSW6
PWSW7
PWSW8
PWSW9
PWSW10
PWSW11
PWSW12
PWSW13
PWSW14
PWSW15
PWSW16
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
ポジションスイッチ機能
6-36
CH1信号出力
CH2信号出力
CH3信号出力
CH4信号出力
CH5信号出力
CH6信号出力
CH7信号出力
CH8信号出力
CH9信号出力
CH10信号出力
CH11信号出力
CH12信号出力
CH13信号出力
CH14信号出力
CH15信号出力
CH16信号出力
2.PLC診断
2.1 PLC信号リスト
アドレス
F162
F163
F164
F165
F166
ビット
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
信号名
TRCA1
TRCA2
TRCA3
TRCA4
TRCA5
TRCA6
TRCA7
TRCA8
FAR1
FAR2
FAR3
FAR4
FAR5
FAR6
FAR7
FAR8
COLS1
COLS2
COLS3
COLS4
COLS5
COLS6
COLS7
COLS8
AXALM1
AXALM2
AXALM3
AXALM4
AXALM5
AXALM6
AXALM7
AXALM8
AXALM9
AXALMa
AXALMb
AXALMc
AXALMd
AXALMe
AXALMf
AXALMg
説 明
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
8CHトレース機能
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
軸アラーム出力信号
6-37
1軸ノミナルクリアレンス状態信号
2軸ノミナルクリアレンス状態信号
3軸ノミナルクリアレンス状態信号
4軸ノミナルクリアレンス状態信号
5軸ノミナルクリアレンス状態信号
6軸ノミナルクリアレンス状態信号
7軸ノミナルクリアレンス状態信号
8軸ノミナルクリアレンス状態信号
1軸FAR状態信号
2軸FAR状態信号
3軸FAR状態信号
4軸FAR状態信号
5軸FAR状態信号
6軸FAR状態信号
7軸FAR状態信号
8軸FAR状態信号
1軸COLLISION状態信号
2軸COLLISION状態信号
3軸COLLISION状態信号
4軸COLLISION状態信号
5軸COLLISION状態信号
6軸COLLISION状態信号
7軸COLLISION状態信号
8軸COLLISION状態信号
第6章 自己診断
アドレス
ビット
信号名
説 明
X0~X4
X114
0~7
機械→PLC入力信号 ユーザ製作
DI03基板 №1
X100
~X107
0~7
操作盤→PLC入力信号 ユーザ製作
RI01基板 №1
X108
~X113
X200
~X201
0~7
操作盤→PLC入力信号 ユーザ製作
RI01基板 №2
X300
~X305
0~7
機械→PLC入力信号 ユーザ製作
DI03基板 №2
X306
~X311
0~7
機械→PLC入力信号 ユーザ製作
DI03基板 №3
X400
~X403
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №1
X404
~X407
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №2
X408
~X411
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №3
X413
~X416
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №4
X417
~X420
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №5
X421
~X424
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №6
X425
~X428
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №7
X429
~X432
0~7
機械→PLC入力信号 ユーザ製作
RI02基板 №8
6-38
2.PLC診断
2.1 PLC信号リスト
アドレス
ビット
信号名
説 明
Y0~Y4
Y412
0~7
機械→PLC出力信号 ユーザ製作
DI03基板 №1
Y100
~Y107
0~7
操作盤→PLC出力信号 ユーザ製作
RI01基板 №1
Y108
~Y112
Y200
~Y201
0~7
操作盤→PLC出力信号 ユーザ製作
RI01基板 №2
Y300
~Y305
0~7
機械→PLC出力信号 ユーザ製作
DI03基板 №2
Y306
~Y311
0~7
機械→PLC出力信号 ユーザ製作
DI03基板 №3
Y400
~Y403
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №1
Y404
~Y407
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №2
Y408
~Y411
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №3
Y413
~Y416
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №4
Y417
~Y420
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №5
Y421
~Y424
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №6
Y425
~Y428
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №7
Y429
~Y432
0~7
機械→PLC出力信号 ユーザ製作
RI02基板 №8
6-39
第6章 自己診断
アドレス
R0
≀
R519
ビット
信号名
説 明
0~7
内部リレー
(R500~R519だけ読み込み専用データ)
A0
≀
A24
0~7
各点 = 0:メッセージ消去要求
1:メッセージ表示要求
各点(ビット)は対応する一つのメッセージの表示要求フラ
グになります。ひとつのメッセージは最大128文字で
す。
K0
≀
K15
0~7
キープリレー
C0
≀
C79
0~7
リングカウンタ
カウント範囲:0~32767
カウンタ一つが4バイト(2バイト:プリセット値、2
バイト:積算値)を占有します。
シーケンスプログラミング時にはカウンタ番号(1~2
0)を指定して使用します。
D0
≀
D511
0~7
データテーブル
アドレスが
無いデータ
0~7
可変タイマ
1secのロングタイマ(№1~8)
(範囲:1sec~32767sec)
10msecのショートタイマ(№9~40)
(範囲:10msec~327.67sec)
アドレスが
無いデータ
0~7
固定タイマ(最大100個)
(範囲:10msec~327.67sec)
6-40
2.PLC診断
2.1 PLC信号リスト
2.2 PLC信号リスト2(機能順)
注意事項)
軸数
1〜16軸
SENTROL 300/350
No.
1
機能
*IT (G00.0)
*AIT (G01.0)
機能内容
サーボメインパワーオン
制御装置準備完了
サーボ準備完了
外部リセット要求
NC側非常停止
非常停止要求
リセット&リワインド要求
リセットキー状態
非常停止L/S オン状態
(自動、手動)全軸インタロック要求
(自動)全軸インタロック要求
インタロック
*CSL(G00.1)
*BSL(G01.1)
切削ブロックスタートインタロック
ブロックスタートインタロック
サーボオフ
*IT1 (G64.4)
*IT2 (G74.4)
*IT3 (G84.4)
*SVF1 (G64.6)
*SVF2 (G74.6)
*SVF3 (G84.6)
第1軸インタロック
第2軸インタロック
第3軸インタロック
第1軸サーボオフ要求
第2軸サーボオフ要求
第3軸サーボオフ要求
第1軸サーボオフ状態通知
第2軸サーボオフ状態通知
第3軸サーボオフ状態通知
第1軸-オーバトラベル
第1軸+オーバトラベル
第2軸-オーバトラベル
第2軸+オーバトラベル
第3軸-オーバトラベル
第3軸+オーバトラベル
DKUの"CYCLE START"キー入力
自動運転起動要求
自動運転休止要求
準備機能
リセット
非常停止
NC→PLC信号
SMPON (F07.2)
MA (F00.7)
SA (F00.6)
PLC→NC信号
ERS (G00.7)
*ESPM (F02.2)
*ESP (G00.4)
RRW (G00.6)
2
*RST (F00.2)
非常停止L/S EMGLS (F07.0)
3
4
5
*ENB1 (F64.7)
*ENB2 (F68.7)
*ENB3 (F72.7)
*-L1
*+L1
*-L2
*+L2
*-L3
*+L3
オーバトラベル
(ハード)
自動スタート
(G64.1)
(G64.0)
(G74.1)
(G74.0)
(G84.1)
(G84.0)
DST (F01.2)
ST (G05.0)
6
フィード/ホー
ルド
自動運転状態
アラーム
7
スピンドル数
〜 4
*SP (G00.5)
DSP (F02.3)
OP (F00.5)
STL (F00.4)
SPL (F00.3)
AL (F00.1)
PSALM (F06.0)
SVALM (F06.1)
OHALM (F06.2)
OTALM (F06.3)
SYALM (F06.4)
AXSALM (G2.6)
6-41
DKUの"FEED HOLD"キー入力
自動運転中表示
自動運転起動中表示
自動運転休止中表示
アラーム発生中
プログラムアラーム発生中
サーボアラーム
オーバヒートアラーム
オーバトラベルアラーム
システムアラーム
軸アラームキャンセル信号
第6章 自己診断
No.
機能
補助機能
主軸機能
工具機能
8
第2補助機能
分配完了
NC→PLC信号
M00~M31
(F16.0~F19.7)
MF (F08.0)
9
機能内容
Mコード出力(4バイト)
Mフラグストローブ信号
S00~S31
(F20.0~F23.7)
SF (F08.1)
Sコード出力(4バイト)
T00~T31
(F24.0~F27.7)
TF (F08.2)
Tコード出力(4バイト)
B00~B31
(F28.0~F31.7)
BF (F08.3)
Bコード出力(4バイト)
DEN (F01.0)
IPEN (F01.1)
分配完了およびインポジション
分配完了
完了信号
デコードM信
号
PLC→NC信号
Sフラグストローブ信号
Tフラグストローブ信号
Bフラグストローブ信号
FIN (G05.1)
M,S,T,Bコード完了信号
DM00 (F09.4)
DM01 (F09.5)
DM02 (F09.6)
DM30 (F09.7)
RO00~RO15
(F10.0~F11.7)
M00実行
M01実行
M02実行
M30実行
スピンドル指令回転数
(2バイト)
AR00~AR15
(F12.0~F13.7)
実際の主軸回転数
(ポジションコーダからの入力2バイト)
MR00~MR15
(F14.0~F15.7)
クランプ回転数
(2バイト)
MSOC (F06.6)
SOR0~7 (F40)
スピンドルオーバライドキャンセル
スピンドルオーバライド 50%-150%
主軸制御
(第1軸の場合) SARM1 (F44.7)
SST1 (F44.6)
*SPAL1 (F44.5)
ORAR1 (F44.4)
SCMP (G06.0)
SOVR0~ 7(G18)
RIGN1 (G25.7)
RI100~RI111
(G24.0~F25.3)
スピンドル速度到達信号
ゼロ速度信号
スピンドル故障
オリエンテーション完了
スピンドルクランプ状態
スピンドルオーバライド入力
ゼロ指令電圧+
指令電圧
指令(12ビット)
ALMR1 (G42.5)
RDY1 (G42.4)
ORCM1 (G43.7)
CRSFR1 (G43.6)
CRSRV1 (G43.5)
*ESP1 (G43.4)
アラームリセット
スピンドル準備信号
オリエンテーション指令
スピンドル正回転
スピンドル逆回転
スピンドル非常停止
6-42
2.PLC診断
2.1 PLC信号リスト
No.
機能
リジッドタッ
ピング
NC→PLC信号
RTAP (F07.3)
PLC→NC信号
RGTMD1 (G42.2)
HSP1 (G43.1)
9
主軸位置決定
機能
SPSTP (G26.0)
SUCLP (F47.1)
*SEUCL (G26.2)
SCLP (F47.2)
*SECLP (G26.3)
ソフトオペレ
ータパネル入
力信号
プログラム画
面キー
10
SQSPD1 (F44.0)
PB8~15 (F42)
PB0~7 (F43)
PB16~23 (F45)
メモリ保護
10
MKEY
CSS
THRD
プログラム
RPD
状態 TAP
INCH
CUT
主軸停止確認信号
主軸アンクランプ要求信号
主軸アンクランプ完了信号
主軸クランプ要求信号
主軸クランプ完了信号
RGT11,RGT10
リジッドタッピングギア選択信号
(G42.1, G42.0)
スピンドル 0スピード信号
操作盤スイッチ入力信号
RMLK (F46.7)
ROVC (F46.6)
RABS (F46.5)
RM01 (F46.4)
RSBK (F46.3)
RBDT1 (F46.2)
RDRN (F46.1)
RAFL (F46.0)
RCLMA (F47.0)
RCLCA (F47.7)
RCHIP (F47.5)
ソフトオペレ
ータパネルス
イッチ状態
機能内容
リジッドタッピングモード指令通報
リジッドタッピングモード選択準備
完了信号
ハイスピードタッピングモード
マシンロックスイッチ入力信号
オーバライドキャンセルスイッチ
マニュアルアブソリュートスイッチ
M01スイッチ
シングルブロックスイッチ
オプショナルブロックスキップスイッチ
ドライランスイッチ
AUXファンクションロックスイッチ
クーラントマニュアルスイッチ
クーラントキャンセルスイッチ
チップコンベアスイッチ
RPB8~15 (G40)
RPB0~7 (G41)
RPB16~23 (G44)
操作盤スイッチ状態表示要求
KEY1
KEY2
KEY3
KEY4
メモリプロテクト要求
メモリプロテクト要求
メモリプロテクト要求
メモリプロテクト要求
メモリプロテクト状態
周速一定制御中
ネジ切削中
早送り中
タッピング中
インチ入力モード中
切削送り中
(G05.4)
(G05.5)
(G05.6)
(G05.7)
(F06.7)
(F01.7)
(F01.6)
(F01.5)
(F01.4)
(F01.3)
(F02.1)
6-43
第6章 自己診断
No.
機能
NC→PLC信号
PLC→NC信号
AFL (G04.0)
MAFL (F04.0)
DRN (G04.1)
MDRN (F04.1)
BDTI (G04.2)
MBDT1 (F04.2)
SBK (G04.3)
MSBK (F04.3)
OVC (G04.4)
M01 (G06.1)
12
自動運転テス
ト
MM01 (F04.4)
ABS
(G04.5)
MABS (F04.5)
MLK (G04.7)
MLK1 (G65.3)
MLK2 (G75.3)
MLK3 (G85.3)
軸移動状態
軸移動方向
13
インポジショ
ン
MMLK (F04.7)
マシンロック要求
第1軸に対するマシンロック
第2軸に対するマシンロック
第3軸に対するマシンロック
マシンロック状態
EDTCHK (F07.1)
MV1 (F64.2)
MV2 (F68.2)
MV3 (F72.2)
編集モード運転チェック中信号
第1軸移動中
第2軸移動中
第3軸移動中
MD1 (F64.3)
MD2 (F68.3)
MD3 (F72.3)
第1軸-方向移動中
第2軸-方向移動中
第3軸-方向移動中
ZPLS1 (F65.1)
ZPLS2 (F69.1)
ZPLS3 (F73.1)
第1軸エンコーダ Zパルス確認信号
第2軸エンコーダ Zパルス確認信号
第3軸エンコーダ Zパルス確認信号
INP1 (F64.6)
INP2 (F68.6)
INP3 (F72.6)
第1軸インポジション状態
第2軸インポジション状態
第3軸インポジション状態
早送り第2インポジション機能ON信号
原点復帰選択要求
原点復帰選択中
MPG送り選択要求
MPG送り選択中
JOG送り選択要求
JOG送り選択中
MDI運転選択要求
MDI運転選択中
テープ運転選択要求
テープ運転選択中
メモリ運転選択要求
メモリ運転選択中
編集モード選択要求
編集モード選択中
COINP2 (G263.7)
ZRN (G03.0)
MZRN (F03.0)
H (G03.1)
MH (F03.1)
J (G03.2)
MJ (F03.2)
D (G03.3)
14
機能内容
AUXファンクションロック要求
AUXファンクションロック状態
ドライラン要求
ドライラン状態
オプショナルブロックスキップ要求
オプショナルブロックスキップ状態
シングルブロック要求
シングルブロック状態
オーバライドキャンセル要求
M01選択要求
M01選択状態
マニュアルアブソリュート要求
マニュアルアブソリュート状態
MD (F03.3)
モード選択
T (G03.4)
MT (F03.4)
MEM (G03.5)
MMEM (F03.5)
EDT (G03.6)
MEDT (F03.6)
6-44
2.PLC診断
2.1 PLC信号リスト
No.
機能
PLC→NC信号
ZRN (G03.0)
機能内容
原点復帰モード選択要求
原点復帰モード
移動軸方向
+J1
-J1
+J2
-J2
+J3
-J3
第1軸+方向原点
-方向
第2軸+方向原点
-方向
第3軸+方向原点
-方向
速度選択
ROV2 (G06.6)
ROV1 (G06.5)
原点復帰
復帰完了
15
NC→PLC信号
MZRN (F03.0)
(G65.0)
(G65.1)
(G75.0)
(G75.1)
(G85.0)
(G85.1)
0
0
1
0 RT1 1RT2 0 RT3
ZP1 (F64.0)
ZP21 (F64.1)
ZP31 (F64.4)
ZP41 (F64.5)
第1軸原点復帰完了
第2原点復帰完了
第3原点復帰完了
第4原点復帰完了
ZP2 (F68.0)
ZP22 (F68.1)
ZP32 (F68.4)
ZP42 (F68.5)
第2軸原点復帰完了
第2原点復帰完了
第3原点復帰完了
第4原点復帰完了
ZP3 (F72.0)
ZP23 (F72.1)
ZP33 (F72.4)
ZP43 (F72.5)
第3軸原点復帰完了
第2原点復帰完了
第3原点復帰完了
第4原点復帰完了
RPRF1 〜
(G65.7 〜 )
原点復帰完了状態 出力信号
減速ドッグ入力
*DEC1
*DEC2
*DEC3
*DEC4
*DEC5
*DEC6
第1軸減速信号
第2軸減速信号
第3軸減速信号
第4軸減速信号
第5軸減速信号
第6軸減速信号
(X00.0)
(X00.2)
(X00.4)
(X00.6)
(X01.0)
(X01.2)
自動原点復帰
用信号
ADEC1 (G65.4)
ADEC1 (G75.4)
ADEC1 (G85.4)
H (G03.1)
MPG送り
MH (F0.3)
16
第1軸自動原点復帰用信号
第2軸自動原点復帰用信号
第3軸自動原点復帰用信号
MPG送り選択
MPG送り選択
送り軸
HS1A~D (G11.0~3) MPG1の送り軸選択
HS2A~D (G11.4~7) MPG2の送り軸選択
HS3A~D (G10.0~3) MPG3の送り軸選択
移動量
MP2 (G06.3)
MP1 (G06.2)
0 0
LII x 1
LII x 10
0 1
1
0
LII x 100
倍率:パラメータ1414~1416
(LII = Least Input Increment)
6-45
第6章 自己診断
No.
機能
手動連続送り
NC→PLC信号
PLC→NC信号
J (G03.2)
機能内容
JOG送り選択要求
JOG送り選択中
送り軸
+J1
-J1
+J2
-J2
第1軸+方向原点
-方向
第2軸+方向原点
-方向
速度選択
*JV0~7 (G15)
JOG速度選択
早送り選択
送り速度
RT (G06.7)
ROV2 (G06.6)
ROV1 (G06.5)
*FV0~7 (G12)
早送り選択
0
0RT2 1
RT3
RT1
0
1
0
フィードオーバライド%
フィードオーバライドキャンセル要求
オーバライド100%
フィードオーバライドキャンセル確認
指定オーバライド3倍信号
早送りフィードオーバライド有効要求信号
軸別オーバライド型JOG送り機能
MJ (F03.2)
17
送りオーバラ
イド
(G65.0)
(G65.1)
(G75.0)
(G75.1)
MFOC (F06.5)
OVC (F04.4)
ROVC (F46.6)
18
FDOR3 (G2.5)
RPDOVR (G260.0)
JFV0〜15
(G13, G14)
SKIP1 (G00.3)
SKIP2 (G01.5)
SKIP3 (G01.6)
SKIP4 (G01.7)
EXRD (G32.1)
EXPUN (G32.0)
EXSTP (G32.2)
スキップ機能
19
外部入力/出力
RPBSY (F07.4)
外部ワーク番
号サーチ
WN1~128 (G19)
外部ワーク番号サーチ
外部データ入力
EIA0~7 (G33)
EID0~47
(G34~39)
EISTB (G32.7)
外部データ入力用アドレス信号
外部データ入力用データ信号
20
EIREND (F32.5)
ESEND (F07.5)
外部データ出力 EOA0~7 (F33)
E0D0~47
(F34~39)
ERDRQ (G32.6)
カスタムマクロ
入力信号用I/F
外部データ入力用ストローブ信号
外部データ入力用リード完了信号
外部サーチ完了信号
外部データ出力用アドレス信号
外部データ出力用データ信号
EOSTB (F32.7)
21
SKIP1要求
SKIP2要求
SKIP3要求
SKIP4要求
外部リード開始要求信号
外部パンチ開始要求信号
外部リード/パンチ停止要求信号
外部リード/パンチ中信号
EOREND (G32.5)
UI000~031
(G48~G51)
UI100~131
(G52~G55)
UI200~231
(G56~G59)
UI300~331
(G60~G63)
6-46
外部データ出力要求信号
外部データ出力用ストローブ信号
外部データ出力用リード完了信号
カスタムマクロ用入力信号
#1032
カスタムマクロ用入力信号
#1033
カスタムマクロ用入力信号
#1034
カスタムマクロ用入力信号
#1035
2.PLC診断
2.1 PLC信号リスト
No.
機能
21
カスタムマクロ
入力信号用I/F
NC→PLC信号
PLC→NC信号
UI000
UI001〜UI031
UI000~031(G48~G51)
UI100~131(G52~G55)
UI200~231(G56~G59)
UI300~331(G60~G63)
UI000
UI001〜UI031
22
カスタムマクロ
出力信号用I/F
UO000~031(F48~F51)
UO100~131(F52~F55)
UO200~231(F56~F59)
UO300~331(F60~F63)
EOR00~07 (G66)
ECO 0~2
(G67.0~G67.2)
EIF000~015
(G68~G69)
ED000~031
(G70~G73)
EBUF1 (G67.7)
EBSY1 (F66.7)
23
PLC制御軸
(第1軸の場合〉
ECLR1
ESTP1
ESBK1
EMSBK1
(G67.6)
(G67.5)
(G67.4)
(G67.3)
EIAL1 (F66.2)
EOTP1 (F66.5)
EOTN1 (F66.6)
PCAX1 (G65.5)
*SVF1 (G64.6)
工具寿命管理
INP1 (F64.6)
MV1 (F64.2)
TLCHA (F07.6)
TLCHB (F07.7)
TLRST (G10.0)
TLSKP (G09.7)
TL1~64
(G09.0~G09.6)
24
オフセット量
測定値入力信
号
工具長測定用
信号
切削送り速度/主軸速度
軸移動量/ドゥエル時間/主軸方向
軸制御指令送出信号
軸制御指令受取り信号
PLC制御軸リセット
PLC制御軸一時停止信号
PLC制御ブロック停止信号
ブロック停止禁止信号
PLC制御軸アラーム
オーバトラベル+方向信号
オーバトラベル-方向信号
PLC軸制御信号
サーボオフ信号
インポジション信号
軸移動中信号
工具交換要求信号
工具交換完了信号
工具交換リセット信号
工具スキップ信号
工具グループ信号
+MIT1 (G65.6)
-MIT1 (G65.7)
オフセット量測定値X軸+接触面
オフセット量測定値X軸-接触面
+MIT2 (G75.6)
-MIT2 (G75.7)
オフセット量測定値Y軸+接触面
オフセット量測定値Y軸-接触面
TLMI (G08.2)
工具長測定モード選択信号
工具長測定モード状態信号
測定値入力信号
TLMO (F02.4)
MRET (G08.3)
工具測定
機能内容
カスタムマクロ用入力信号 #1000
カスタムマクロ用入力信号
#1001〜#1031
カスタムマクロ用入力信号 #1032
カスタムマクロ用入力信号 #1033
カスタムマクロ用入力信号 #1034
カスタムマクロ用入力信号 #1035
カスタムマクロ用出力信号 #1100
カスタムマクロ用出力信号
#1001〜#1031
カスタムマクロ用出力信号 #1132
カスタムマクロ用出力信号 #1133
カスタムマクロ用出力信号 #1134
カスタムマクロ用出力信号 #1135
切削速度オーバライド
軸制御指令
AE1~3
(G01.2~G01.4)
6-47
測定位置到達信号
第6章 自己診断
No.
機能
チャンファリ
ング信号
NC→PLC信号
ミラーイメー
ジ信号
PLC→NC信号
*CHF (G08.0)
機能内容
チャンファリング無視信号
MI1 (G65.2)
MI2 (G75.2)
MI3 (G85.2)
第1軸ミラーイメージ要求
第2軸ミラーイメージ要求
第3軸ミラーイメージ要求
第1軸ミラーイメージ状態
第2軸ミラーイメージ状態
第3軸ミラーイメージ状態
SYNC1~16
同期制御選択信号
MMI1 (F65.0)
MMI2 (F69.0)
MMI3 (F73.0)
25
同期制御選択
(G17,G16)
26
27
回転軸移動中信号
ハンドルステ
ップフィード
ROTMV (F02.5)
PLCによる
原点復帰
ZRN11
ZRN12
ZRN13
ZRN14
(G228.0)
(G228.1)
(G228.2)
(G228.3)
第1軸
第1軸
第1軸
第1軸
第1原点復帰
第2原点復帰
第3原点復帰
第4原点復帰
ZRN21
ZRN22
ZRN23
ZRN24
(G228.4)
(G228.5)
(G228.6)
(G228.7)
第2軸
第2軸
第2軸
第2軸
第1原点復帰
第2原点復帰
第3原点復帰
第4原点復帰
ZRN31 (G229.0)
ZRN32 (G229.1)
ZRN33 (G229.2)
ZRN34 (G229.3)
PATCR (G236.0)
PATUP (G236.1)
PATDWN (G236.2)
ASET (G236.3)
MSET (G236.4)
PT*1~PT*64
(G237.0~G237.6)
加工設定制御
28
回転軸移動中状態信号
HSF00~HSF30
ハンドルフィードステップ移動距離
(G224.0~G227.7)
(pulse)
HSFON (G227.7)
ハンドルフィードステップ有効
PT_A1~PT_A8
(F148)
PT_M1~PT_M7
(F149)
PDATLD (F151.1)
自動運転表示画面番号
非自動運転表示画面番号
PTNSCR (G263.5)
PATSCR (G263.6)
29
アナログ入力
第3軸 第1原点復帰
第3軸 第2原点復帰
第3軸 第3原点復帰
第3軸 第4原点復帰
エンタキー入力
カーソルアップキー入力
カーソルダウンキー入力
自動運転表示画面番号設定
非自動運転表示画面番号設定
表示画面番号設定データ
ANLG10~ANLG1B
(F130.0~F131.3)
ANLG20~ANLG2B
(F132.0~F133.3)
ANLG30~ANLG3B
(F134.0~F135.3)
6-48
データロード確認信号
加工設定画面選択信号
加工条件設定表示画面選択信号
RAD1基板アナログ入力データ
(チャンネル1)
RAD1基板アナログ入力データ
(チャンネル2)
RAD1基板アナログ入力データ
(チャンネル3)
2.PLC診断
2.1 PLC信号リスト
No.
機能
NC→PLC信号
PLC位置指定
軸移動
30
PLC→NC信号
JGPS01 (G238.0)
ED000~ED031
(G70.0~G73.7)
JGPS02 (G238.1)
ED100~ED131
(G80.0~G83.7)
JGPS03 (G238.2)
ED100~ED131
(G90.0~G93.7)
JGPN01 (F146.0)
JGPN02 (F146.1)
JGPN03 (F146.2)
AS0, AS1
(G263.0, G263.1)
SHTCAN (G263.2)
TRMOD (G47.0)
NOMCL2 (G47.1)
NOMCL3 (G47.2)
トレース機能
TRACT (F32.6)
FAR
(F32.1)
COLLIS (F32.2)
31
機能内容
第1軸位置指定軸移動
第1軸位置指定データ
第2軸位置指定軸移動
第2軸位置指定データ
第3軸位置指定軸移動
第3軸位置指定データ
第1軸位置指定軸移動完了
第2軸位置指定軸移動完了
第3軸位置指定軸移動完了
移動目標位置座標系指定
回転軸最短距離機能取消し信号
トレーシング機能稼働
ノミナルクリアランス設定
ノミナルクリアランス設定
FAR状態
衝突状態
TRC1〜8 (G258)
8CH
8CH
8CH
8CH
プラズマ
PTDMK (G259.0)
32
マクロインタ
ラプト
UNIT (G0.2)
プラズマべべリング
トレーシングデータ作成信号
マクロインタラプト稼動
33
ハンドルイン
タラプト
HINT1 (G64.5)
HINT2 (G74.5)
HINT3 (G84.5)
第1軸ハンドルインタラプト許可
第2軸ハンドルインタラプト許可
第3軸ハンドルインタラプト許可
CAL101~CAL116
(G240.0~G241.7)
CAL201~CAL216
(G242.0~G243.7)
CAL301~CAL316
(G244.0~G245.7)
CAL401~CAL416
(G246.0~G247.7)
CAL501~CAL516
(G248.0~G249.7)
CAL601~CAL616
(G250.0~G251.7)
CAL701~CAL716
(G252.0~G253.7)
CAL801~CAL816
(G254.0~G255.7)
テキストプログラム1計算実行
(O9700)
テキストプログラム2計算実行
(O9701)
テキストプログラム3計算実行
(O9702)
テキストプログラム4計算実行
(O9703)
テキストプログラム5計算実行
(O9704)
テキストプログラム6計算実行
(O9705)
テキストプログラム7計算実行
(O9706)
テキストプログラム8計算実行
(O9707)
8CH
トレース機能
テキスト計算
機能
34
TRCA1〜8 (F162)
FAR11〜8 (F163)
COLS1〜8 (F164)
6-49
各軸トレーシングモード選択信号
各軸ノミナルクリアランス状態信号
各軸FAR状態信号
各軸衝突状態信号
第6章 自己診断
No.
35
機能
ガス切断機
操作キー状態
NC→PLC信号
RPRV
(F152.1)
RXYCHG (F152.2)
RMIRY (F152.3)
RMIRX (F152.4)
RPHCAN (F152.5)
RPRHT (F152.6)
PTDSCR (F155.6)
ALNSCR (F155.7)
MVST
(F153.0)
P_STOP (F153.3)
P_CAN (F153.2)
RTCFL (F153.4)
MMRKMD (F32.4)
MACCL (F153.7)
AFDWN (F153.6)
U0000 (F48.0)
U0001 (F48.1)
U0002 (F48.2)
M_G23R (F158.0)
RTCM1~2
(F155.4, F155.5)
PRERIN (F157.6)
PLC→NC信号
RVS (G8.6)
MRKMD (G47.7)
UI000 (G48.0)
UI001 (G48.1)
UI002 (G48.2)
UI003 (G48.3)
UI004 (G48.4)
UI005 (G48.5)
UI006 (G48.6)
36
Fキー状態
37
画面選択確認
38
ブザー要求
39
数字キー
ON状態出力
40
エッジ制御
KEYF1 (F150.0)
KEYF2 (F150.1)
KEYF3 (F150.2)
KEYF4 (F150.3)
KEYF5 (F150.4)
KEYF6 (F150.5)
KEYF7 (F150.6)
KEYF8 (F150.7)
KEYF9 (F151.0)
KEYF10 (F151.1)
KEYF11 (F151.2)
KEYF12 (F151.3)
DISP0〜4
(F9.0〜F9.3)
機能内容
原点リバースキー ON
X, Y軸交換キー ON
Y軸ミラーイメージキー ON
X軸ミラーイメージキー ON
予熱取消しキー ON
予熱延長キー ON
状態出力信号 加工設定画面表示
状態出力信号 定熱画面表示'
画面状態出力信号 出発位置
画面状態出力信号 完了、取消し
画面状態出力信号 停止
逆行、再順行確認信号
マーキングモード確認信号
加減速中信号
フィードダウン信号
予熱タイマ稼働中
予熱取消し完了
原点リバース中
指定未到達曲線加工信号
逆行/順行モード選択信号
ブロック終了前出力信号
逆行指定信号
マーキングモード ON信号
予熱延長要求処理
予熱取消し要求処理
予熱取消し要求処理
X軸ミラーイメージ選択処理
Y軸 ーイメージ選択処理
原点リバース要求処理
原点リバース点滅要求処理
F1キー ON
F2キー ON
F3キー ON
F4キー ON
F5キー ON
F6キー ON
F7キー ON
F8キー ON
"DISP"キー ON
"MODE"キー ON
"CYCLE START"キー ON
"FEED HOLD"キー ON
画面選択確認信号
BUZ (G2.3)
RKY1〜RKY8 (F154)
RKY9
(F155.0)
RKY0
(F155.1)
ADCNEG (G8.5)
EDGTBL (G47.3)
6-50
ブザー要求信号
数字キー(1〜8)ON状態出力
数字キー(9)ON状態出力
数字キー(0)ON状態出力
エッジ自動加減速無効要求信号
エッジパワーコントロール機能
出力転換信号
2.PLC診断
2.1 PLC信号リスト
No.
41
42
機能
NC→PLC信号
PLC→NC信号
リターン機能 RETFL (F153.5)
PWSW1〜16
ポジション
(F160, F161)
スイッチ
リターン機能稼働中信号
ポジションスイッチ機能CH 信号出力
DSAVE (G257.0)
セーブ実行信号
セーブ実行確認信号
データセーブエラー
セーブ実行確認信号
ファイル操作エラー
セーブ実行確認信号
セーブ正常終了
XYCHG (G8.7)
X,Y アドレス交換選択信号
ADRCAN (G236.7)
REQPB (G261.7)
PLBK1〜5
(G261.0〜4)
刃方向制御実行取消し信号
DSER1 (F157.2)
43
データセーブ
DSER2 (F157.2)
機能
DSFIN (F157.0)
44
45
46
X,Y アドレス
交換
刃方向制御
プレイバック
機能
PLWTING (F157.7)
47
48
49
50
51
52
53
54
55
軸アラーム
PLC出力信号
PLCによる
画面指定
移動速度
出力信号
NCシステム
認識
LAN接続
状態
画面/選択
メニュー表示
プレイバック(ティーチング)機能実行信号
各軸(1〜5)プレイバック機能実行信号
プレイバックテキスト挿入中信号
DSET (G267.7)
G92S0 (G266.6)
0SET1〜g
(G265.0〜G266.7)
PLCによる
絶対座標
0セット機能
機能内容
AXALM1〜AXALMg
(F165〜F166)
PLCによる絶対座標0セット実行信号
PLCによる絶対座標0セット実行信号
PLCによる絶対座標0セット実行信号
軸アラーム出力信号
SCR1〜8 (G264)
(F142〜F145)
PLC画面指定信号
移動速度出力信号
LMSEM (F2.6)
NCシステムプログラム認識番号
PNCLAH (F0.0)
LAN接続確認信号
S_MENU (F151.4)
画面/選択メニュー表示信号
研削機能
GPCOFF (G260.3)
ENBOUT1~16
(G64.2 ~)
TCDSV (G260.4)
TCMDS (G260.5)
TCSTR (G260.6)
TCEND (G260.7)
GTBLN0~3
(G262.0~G262.3)
スピニング機
機能
定研削力制御フィードオーバライド
取消し信号
サーボOFFイネーブル信号
セフティゾーン機能ON信号
ティーチング画面選択要求信号
ティーチングスタート信号
ティーチングエンド信号
ゲインテーブル番号選択信号
ティーチング画面選択確認信号
RTCMD (F156.4)
6-51
第6章 自己診断
3. PLCモニタ機能 (PLCタイミングチャート機能)
3.1 概要
機械の入出力状態をチェックするときに使用する機能です。
機械やNC装置がどのような状態(アラーム発生、フィードホールド、切削油吐出し、マ
ガジンの回転、ツールクランプなど〉になる条件がラダー図を見るとわかりますが、ふつ
う条件が成立した瞬間の機械の入出力信号はわかりません。この機能を使用しそれらを知
ることができます。
3.2 モニタ機能を始める方法
"診断"画面を選択し一般診断で
を選択し
(F8)キーを押すと
というメニューが現れます。それを押すとモニタ機能を始められます。(図6-47)
図6-47モニタ機能画面
:トリガー条件が設定されているときにサンプリングを開始します。
:トリガーの位置が目盛の0/29/59になるように表示。表示位置の変更。
:"原点復帰","手動運転"以外の動作モードのとき表示されモニタのいろい
ろな設定をします。
:リファレンスカーソルの選択。"選択無し","Ref1","Ref2"の3種類を
選択。
:選択されたカーソル位置の移動
:その他の診断メニューの表示
6-52
3. PLCモニタ機能
3.1概要
3.3操作方法
3.3.1 条件設定
まず、動作確認するアドレスおよびトリガーなどモニタ機能に必要なデータを設定し
ます。図6-47の
8-1)
を押すとデータ設定用メニューが表示されます。(図6-4
図6-48-1 条件設定(データ数入力)
1)
を押して確認するアドレスの個数を入力します。(1~8)
1~8を入力しエンターを押すと指定した個数分だけ"ch Name"のカーソル
が生じます。(図6-48-2〉
図6-48-2 データ数入力後
6-53
第6章 自己診断
2)
を押してサンプリング単位時間を入力します。(0~4)
0:10msec 1:50msec 2:100msec 3:500msec 4:1sec
を押すと"Time/Dev"の時間表示が変ります。
図6-49-1 Time/Dev 設定
3)確認するアドレスを設定。F4(Up),F5(Down)を使用してカーソルを移動させ
確認するアドレスをすべて入力します。(図6-49-2)
図6-49-2 アドレス入力
6-54
3.PLCモニタ機能
3.3 操作方法
4)
を押してトリガー条件を設定します。
'0'~'7'のチャンネル番号と'D':ダウンエッジ、'U':アップエッジ
'L':ロウレベル、'H':ハイレベル、'*':AND条件、'+':OR条
件を使用して、トリガー条件を設定します。
例)0U :チャンネル0の信号がオンのとき
0U+1H:チャンネル0の信号がオンまたはチャンネル1の信号がオンのとき
0U*1L:チャンネル0の信号がオンでチャンネル1の信号がオフのとき
図6-50-1 トリガー条件入力
5)
(F6) で設定データを記憶、
前のデータに、
を押すと
(F7) で設定データをキャンセルし以
というメニューが現れます(図6-50-
2)。このメニューで設定データを初期化(クリアー)します。
(F6) で
記憶した設定データはSENTROL2の電源をオフしても保存されていて、続け
て使用できます。
図6-50-2 パラメータ初期化メニュー
6-55
第6章 自己診断
3.3.2 サンプリング
を押すと図6-51-1 のようにすべての条件が表示されます。ここで
を押すとサンプリングが開始され、図6-51-2
のようにメニューが変わり右上に"T
RIG"という表示が点滅します。トリガー条件が成立しサンプリングが終わるまで点滅
が続きます。
サンプリングが終わると画面に信号を表示します。(図6-52-1)
を押すとサンプリングがストップします。
図6-51-1 サンプリング開始
図6-51-2 サンプリング実行中
6-56
3.PLCモニタ機能
3.3 操作方法
図6-52-1 アドレス変化状態表示 開始
3.3.3 表示選択
を押すと表示位置が'Start'(図6-52-1),'中央'(図6-52-2),
'End'(図6-53-1)の順に変わります。
図6-52-2 アドレス変化状態表示 中央
6-57
第6章 自己診断
図6-53-1 アドレス変化状態表示 最後
3.3.4 時間測定
を押すと時間を示す二つの縦の直線(カーソル)を選択でき、選択した状態で
(F6),
(F7)キーで直線を移動できます。その2つのカーソルの時間の
差が'Ref.Time'に表示されます。
図6-53-2 時間測定
6-58
3.PLCモニタ機能
3.3 操作方法
4.一般診断
0000
7
6
5
4
3
2
1
0
DEC
TCS
RPI
FED
RAC
FEA
RPF
INP
DEC 0:原点復帰用 リミットスイッチ ON
1:原点復帰用 リミットスイッチ OFF
TCS 0:タッチセンサ OFF
1:タッチセンサ ON
RPI 0:原点位置停止中
FED 0:フィード方向 +
1:フィード方向 -
RAC 1:原点復帰中
FEA 1:フィードアクティブ
RPF 1:原点復帰完了
INP 1:インポジション状態
0001
MACHINE POSITION
機械座標位置
単位:出力単位
0002
POSITION ERROR [pulse]
位置偏差
単位:検出単位
0003
COMPENSATION [machine]
補正量(バックラッシュ補正量+ピッチ誤差補正量)
単位:出力単位
6-59
第6章 自己診断
0004
ENCODER COUNTER [pulse]
エンコーダ用フィードバックカウンタ値
単位:検出単位
0005
ENCODER CTR SKIP [pulse]
スキップ信号またはENZでラッチされたエンコーダフィードバックカウンタ値
単位:検出単位
7
6
5
4
0006
3
2
1
0
ENT
ENZ
ENB
ENA
2
1
0
EBL
PRD
ENT: エンコーダタッチセンサ 1:ON
ENZ: エンコーダゼロ信号 1:ON
ENB: エンコーダA相信号
ENA: エンコーダB相信号
7
6
5
4
0007
EBL 0:サーボイネーブル ON
1:サーボイネーブル OFF
PRD 0:位置制御レディ ON
1:位置制御レディ ON
0008
DA CONVERTER O.P.
DAコンバータ出力値
6-60
3
4.一般診断
0009
ACTUAL SPEED
実速度
0010
単位:(10mm/min)
DRIFT
ドリフト補正量
0011
単位:velo(1 velo = 0.31mV)
POSITION LOOP GAIN
位置ループゲイン
0012
単位:(1/100s)
PULSE COUNTER MISS
パルスカウントミス量(符合付き)
単位:(pulse)
0013
ENC 1REV PULSE
エンコーダ1回転当りの発生パルス数(A相またはB相)
単位:(pulse)
0014
SKIP MACHINE POSITION
スキップ信号オン時の機械座標(内部分配単位)
0015
SPINDLE POSITION CODER [pulse]
スピンドルエンコーダ用フィードバックカウンタ値
単位:検出単位
0016
SPINDLE POSITION LOOP GAIN
リジッドタップ時の主軸の位置ループゲイン
6-61
単位:(1/100s)
第6章 自己診断
0017
SPINDLE POSITION ERROR [pulse]
リジッドタップ時の主軸の位置偏差
単位:検出単位
7
0018
6
5
4
SKP
MPB
MPA
3
2
1
0
SKP 0:スキップ信号 オン
MPB マニュアルパルスジェネレータ B相信号
MPA マニュアルパルスジェネレータ A相信号
0019
7
6
5
4
3
2
1
0
E1F
E2F
E3F
E4F
15D
24D
EMG
ELS
E1F: 0:EPS8 #1の24Vヒューズが断線したとき
E2F: 0:EPS8 #2の24Vヒューズが断線したとき
E3F: 0:EPS8 #3の24Vヒューズが断線したとき
E4F: 0:EPS8 #4の24Vヒューズが断線したとき
15D: 0:メインユニット内部の±15Vがショートなどによって±13V以
下になったとき
24D: 0:メインユニット内部の±24Vがショートなどによって±20V以
下になったとき
EMG: 0:非常停止スイッチを押した状態
ELS: 0:非常停止リミットスイッチがONのとき
7
6
5
0020
4
3
2
1
0
PCZ
PCB
PCA
PCZ: 1:スピンドルポジションコーダゼロ信号 ON
PCB: 1:スピンドルポジションコーダB相信号 ON
PCA: 1:スピンドルポジションコーダA相信号 ON
6-62
4.一般診断
0021
SYNC POS ERR DIFF
各軸スレーブ軸のマスター軸との位置偏差の差の表示 (2バイトデータ)
表示単位:検出単位(PULSE)
0022
SYNC POS CORRECTION
同期運転制御で同期を合わせるための補正電圧
スレーブ軸のデータだけを表示(2バイトデータ)
表示単位:0.305 mV
0023
SYNC TORQUE DIFF
各軸スレーブ軸のマスター軸とのトルクモニタの差の表示 (2バイトデータ)
表示単位:0.4.88 mV
0024
SYNC SIFT VALUE
同期運転制御で同期を合わせるためのシフト値
スレーブ軸のデータだけを表示(2バイトデータ)
表示単位:検出単位(PULSE)
0025
SYNC GRID SHIFT DIFF
同期軸間のグリッドシフト差を表示します
パラメータ1817番 UR6 = 1 の場合有効
表示単位:検出単位(PULSE)
0026
CLOSED LOOP POSS ERROR
クローズドループの位置偏差量(ポジションエラー)
表示単位:セミ閉ループ検出単位(PULSE)
6-63
第6章 自己診断
0027
ERR BETWEEN SEMI & CLOSED
クローズドループの位置偏差量とセミクローズドループの位置偏差量の差
表示単位:セミ閉ループ検出単位(PULSE)
0028
DUAL F/B COMPENSATION
デュアルポジションフィードバック制御機能の補正量
表示単位:セミ閉ループ検出単位(PULSE)
0029
SPINDLE2 POSITION CODER
第2スピンドルのポジションコーダ用フィードバックカウンター値
表示単位:検出単位
0030
SPINDLE2 POSITION GAIN
第2スピンドルリジットタッピング時の主軸位置ループゲイン
表示単位:[1/100s]
0031
SPINDLE2 POSITION ERROR
第2スピンドルリジットタッピング時の主軸位置偏差量
表示単位:検出単位
0032
LOAD FACTOR1 % (1/10)
外部でのアナログ電圧1を入力し基準電圧の何パーセントかを表示
単位:0.1%
0033
LOAD FACTOR2 % (1/10)
外部でのアナログ電圧2を入力し基準電圧の何パーセントかを表示
単位:0.1%
6-64
1. パラメータの設定
1.1. パラメータの設定方法
第 7 章 パラメータ
1. パラメータ設定
1.1 パラメータの設定方法
“操作盤” 画面で“KEY”をオン状態にしパラメータを設定できます。
パラメータ設定には操作設定画面(図5-1)と保守設定画面(図5-2)があります。
図5-2 保守設定画面
図5-1 操作設定画面
1.1.1 操作パラメータの設定方法
“操作盤”のキーをオンにして原点復帰・手動運転モード以外のモードで“設定”画
面を選択します。“操作設定”画面が表示されないときは
を押した後に
“操作設定”キーを押します。
F-キーの機能は次の表のようになります。カーソルを設定しようとするパラメータの
上に移動して設定値を入力すれば設定できます。
パラメータ番号を指定します。
各カーソルが上下に移動します。
画面が一面ずつ変わります。
次のメニューが表示されます。
7-1
第7章 パラメータ
1.1.2 保守パラメータの設定方法
“操作盤”の“KEY”をオンにし、MDIモードで“設定”画面を選択します。
“保守設定” 画面が表示されないときは
ます。そして下の表のように
を押した後
キーを押し
F-キーでカーソルを設定するパラメータの上に移動し
て入力キーで設定値を入力します。
を押してパラメータ番号を入力するとパラメータ番号を検索できます。
数字を修正する場合
(バックスペース)キーを押して数字を入力します。
一時入力された数字を全て取消すときは
キーを押します。
キーを
押すと入力された数字が設定されます。
パラメータ番号を指定します。
各カーソルが上下左右に移動します。
画面が一ページずつ変わります。
次のメニューが表示されます。
注1) 各設定パラメータにはそれぞれ数値設定可能範囲があります。
注2) 上で指定した“次のメニュー”とは下のようなもので各種の設定画面選択でき
ます。
注3) NCのパラメータは旋盤用, ミーリング用などのモデルに関係なく全てのモデ
ルの画面に共通的に表示されます。それで次の“2.NCのパラメータ一覧”で
は各パラメータに対して次のように表示して区別します。
1. (L) : 旋盤用にだけ有効なパラメータ(SENTROL2-Lなど)
2. (M) : ミーリング用にだけ有効なパラメータ(SENTROL2-Mなど)
3. 無表示 : 全てのNCのモデルに有効なパラメータ
4. (レーザ切断機用) : レーザ切断機用にだけ有効なパラメータ
5. (アンギュラー研削機用) : アンギュラー研削機用にだけ有効なパラメータ
ただし、アンギュラー研削機にはにはこのパラメータと旋盤用NCのパラ
メータを一緒に使用します。
7-2
1. パラメータの設定
1.1. パラメータの設定方法
1.1.3
ピッチ誤差補正パラメータの設定方法
“操作盤”の“KEY”をオンにし、MDIモードで“設定”画面を選択します。
“ピッチ誤差”
画面が表示されないときは
を押した後
“キーを
押します。そして 下の表のように F-キーでカーソルを 設定するパラメータの上に
移動して数字キーで 設定値を入力します
“番号”キーを押してパラメータ番号を入力するとパラメータ番号を検索できます。
数字を修正する場合
(バックスペース)キーを押して数字を入力します。
一時入力された 数字を全て取消すときは
キーを押します。
キーを
押せば入力された数字が設定されます。
設定範囲 : -127 ~ 127
パラメータ番号を指定します。
各カーソルが上下左右に移動します。
画面が一ページずつ変わります。
次のメニューが表示されます。
イ) 記憶型ピッチ誤差補正機能の概要
この機能はピッチ誤差を各軸ごとに最小移動単位で補正できます。(ただし、こ
の機能は原点復帰後に有効です。) 原点復帰後工具位置を補正源にし各軸ごとに
設定された補正間隔に補正値をパラメータで設定します。
(1) 補正可能な軸 : 全軸(回転軸も可能)
(2) 補正点数 : 全軸合計最大640点
1軸あたり最大256 点
(3) 補正量範囲
1補正点あたり : -127 ~ 127
補正単位は直径指令/半径指令により設定されます。
ロ) パラメータ設定
ピッチ誤差に関する次のパラメータを設定します。
(1) 原点のピッチ誤差補正点番号 (各軸) ----------- パラメータ5420
(2) 一番-側のピッチ誤差補正点番号 (各軸) ------- パラメータ5421
(3) 一番+側のピッチ誤差補正点番号 (各軸) ------- パラメータ5422
(4) ピッチ誤差補正点間隔 (各軸) ----------------- パラメータ1813
ピッチ誤差補正点間隔は最小値に制限があり、次の式で決定されます。
間隔最小値 = 最大速度 / 12000 単位 : mm, deg
例) 最大速度が1200mm/minのピッチ誤差補正点間隔の最小値は1mmになります
7-3
第7章 パラメータ
(5) ピッチ誤差補正量 – パラメータ3000 ~ 3639 の各ピッチ誤差補正点番号
に 対応して補正量を設定します。
ハ) パラメータ設定例
(1) 直線軸
ピッチ誤差(絶対値)
+
-
-方向
原点
+方向
0
+2
0
-1
0
+1
+2
3099
3098
3097
3096
3095
3094
3093
-1
-2
-2
3092
3091
3090
-1
3089
+2
各点の補正値
3088 パラメータ番号
補正間隔:10000、補正点:100点の場合、パラメータを次のように設定しま
す。
原点のピッチ誤差補正点 NO.5420=95
-側のピッチ誤差補正点 NO.5421=0
+側のピッチ誤差補正点 NO.5422=99
ピッチ誤差補正点の間隔 NO.1813=10000
補正値は補正間隔間ピッチ誤差補正値(インクリメンタル値)を設定します。
注) パラメータ番号は+方向に増えるように設定します。
(1) 回転軸(パラメータ1814 REV=1の場合)
補正間隔と補正点数は次のような条件を満足しないといけません。
360000 = 補正間隔 × 補正点数
また1回転あたりの補正量の総合計は必ず:0になるように設定ます。
ピッチ誤差(絶対値)
+
+方向
-
360deg.
0deg.
原点
0
3300
+2
-2
-1
-1
+2
3301
3302
3303
3304 3305
+2
-1
3306
3307
-2
+1
3308 3309
補正間隔:3600、補正点:10点の場合、パラメータを次のように設定します。
原点のピッチ誤差補正点 NO.5420=300
-側のピッチ誤差補正点 NO.5421=300
+側のピッチ誤差補正点 NO.5422=309
ピッチ誤差補正点の間隔 NO.1813=36000
7-4
2.パラメータ一覧
2. NCのパラメータ一覧
0000
DC3
7
6
5
4
3
2
1
0
DC3
%0F
ARC
EIA
NCR
ISP
CTV
TVC
1 : プログラムをRS232Cで出力時は、データ出力後にDC3信号を出力します。
0 : プログラムをRS232Cで出力時は、データ出力後にDC3信号を出力しません。
%OF
1 : プログラムをRS232Cで入力時は、 CR信号で入力を始めます。
0 : プログラムをRS232Cで入力時は、"%" + "CR信号"で入力を始めます。
ARC
1 : 面取り、コーナーRの指定に"C", "R"を使います。
0 : 面取り、コーナーRの指定に"I", "K", "Rを使います。
(ただし, ARC=0 の時 任意の角度は "C", "R"を使います。)
EIA
1 : パンチコードは EIAコードです。
0 : パンチコードは ISOコードです。
NCR
1 : ISOコードでEOBをパンチする時の方法は LF です。
0 : ISOコードでEOBをパンチする時の方法は LF CR CR です。
ISP
1 : ISOコードはパリティビットがありません。
0 : ISOコードはパリティビットがあります。
CTV
1 : コントロールアウト中はTVチェックのための文字カウントを行いません。
0 : コントロールアウト中はTVチェックのための文字カウントを行います。
TVC
1 : TVチェックを行います。
0 : TVチェックを行いません。
0011
SOF
7
6
5
4
3
2
1
0
SOF
SBO
SBC
SBM
D24
TMR
ND8
NE8
1 : FANUC 6/10/11のテープフォーマットが有効です。
0 : FANUC 0のテープフォーマットが有効です。
SBO 工具径補正(M)/刃先R補正(L)のためにNC内部で作られたブロックで
1 : シングルブロック停止させます。
0 : シングルブロック停止させません。
SBC
1 : 固定サイクルの各サイクルごとにシングルブロック停止になります。
0 : 固定サイクルの各サイクルごとにシングルブロック停止になりません。
SBM
1 : マクロ文シングルブロックを有効にします。
0 : マクロ文シングルブロックを無効にします。
D24
1 : 加工プログラム等をRS232Cで出力する時 DC2, DC4を出力します。
0 : 加工プログラム等をRS232Cで出力する時 DC2, DC4を出力しません。
TMR
1 : M00/M01実行後サイクルタイム(加工時間)をクリアーします。
0 : M00/M01実行後サイクルタイム(加工時間)をクリアーしません。
7-5
第7章 パラメータ
ND8 O8000~O8999のプログラムについて実行中はプログラムを画面に
1 : 表示しません。
0 : 表示します。
NE8
0012
AXC
1 : O8000~O8999のプログラム編集を禁止します。
0 : O8000~O8999のプログラム編集を禁止しません。
(AX)
7
6
5
4
AXC
LCC
SPP
F10
3
2
SCL
(M)
1
0
SMR
MIR
1 : リターン機能で軸を無視します。
0 : リターン機能で軸を無視しません。
LCC
1 : PLCで位置設定移動をする時、移動範囲チェックを取り消します。
0 : PLCで位置設定移動をする時、移動範囲チェックをします。
SPP
1 : PLCで位置設定移動をする時、各軸の速度指令は4バイトの値です。
0 : PLCで位置設定移動をする時、各軸の速度指令は2バイトの値です。
F10
1 : PLCで位置設定移動をする時、設定値を1/10にします。
0 : PLCで位置設定移動をする時、 設定値はそのままです。
SCL
1 : 各軸に対するスケーリングを有効にします。
0 : 各軸に対するスケーリングを無効にします。
SMR 簡易同期制御でミラーイメージをONにした時に、メイン軸とスレーブ軸が
1 : 反対方向に動きます。
MIR
0020
0 : 反対方向に動きません。
1 : 各軸のミラーイメージの設定をオンにします。(ミラー)
0 : 各軸のミラーイメージの設定をオフにします。(ノーマル)
FOREGROUND INPUT
フォアグラウンド用入力機器のインターフェイス番号を設定します。
0 : RS232C インターフェイス 1 (COM1)。
1 : RS232C/RS422 インターフェイス 2 (COM2)。
0021
FOREGROUND OUTPUT
フォアグラウンド用出力機器のインターフェイス番号を設定します。
0 : RS232C インターフェイス 1 (COM1)。
1 : RS232C/RS422 インターフェイス 2 (COM2)。
0022
EXTERNAL INPUT
外部入出力機器の制御用入力機器のインターフェイス番号を設定します。
0 : RS232C インターフェイス 1 (COM1)。
1 : RS232C/RS422 インターフェイス 2 (COM2)。
7-6
2.パラメータ一覧
0023
EXTERNAL OUTPUT
外部入出力機器の制御用出力機器のインターフェイス番号を設定します。
0 : RS232C インターフェイス 1 (COM1)。
1 : RS232C/RS422 インターフェイス 2 (COM2)。
0032
AUTO INCREMENT
シーケンス番号自動設定時のインクリメント値を設定します。
設定値 : 1 ~ 127
1000
RV1
RVM
DRO
RAB
NCE
(AX)
1
0
1
0
1
0
1
0
1
:
:
:
:
:
:
:
:
:
7
6
5
4
3
2
1
0
RV1
RVM
DRO
RAB
NCE
ROS
CSZ
EEN
回転軸停止時、1回転後原点復帰します。
回転軸停止時、1回転せずに原点復帰します。
回転軸停止時、-方向に移動します。
回転軸停止時、+方向に移動します。
ディジタルリードアウトを有効にします。
ディジタルリードアウトを無効にします。
回転軸停止時に絶対座標を回転軸表示します。
回転軸停止時に絶対座標を回転軸表示しません。
サーボレディチェック時サーボイネーブル信号をチェックしません。
インデックステーブル等サーボオフ機能を使用する軸を1に設定します。
0 : サーボレディチェック時サーボイネーブル信号をチェックします(標準)。
ROS ストロークチェックと自動リファレンス点復帰の機械座標系は
1 : 直線軸型です。
0 : 回転軸型です。
CSZ 未使用
EEN 1 : 指定軸に2文字の軸名を使用します。
0 : 指定軸に1文字の軸名を使用します。
7-7
第7章 パラメータ
1004
(AX)
RV- 1
0
RV+ 1
0
2RS 1
0
AFC 1
0
IRP 1
0
:
:
:
:
:
:
:
:
:
:
7
6
5
4
RV-
RV+
2RS
AFC
3
2
1
IRP
0
RVS
回転軸指令時、常に-方向に移動します。
回転軸指令時、常に-方向に移動しません。
回転軸指令時、常に+方向に移動します。
回転軸指令時、常に+方向に移動しません。
回転軸を第2原点にG30で移動する時、最短距離で移動します。
回転軸を第2原点にG30で移動する時、最短距離では移動しません。
PLC軸があるときのPLC軸を実速度計算から除外します。
PLC軸があるときのPLC軸を実速度計算に組み入れます。
各軸の入力単位を10倍にします。
各軸の入力単位を10倍にしません。
RVS
1 : 回転軸指令時、最短距離で移動します。
0 : RV-、RV+の値に従います。
* RV-、RV+は RVSが0の時有効で両方が1に設定されている時は無効になります。
1005
RMB
PLC
PND
DCI
ZNG
PLZ
(AX)
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
7
6
5
RMB
PLC
PND
4
3
2
1
0
DCI
ZNG
PLZ
ALZ
軸を無効と見做します。
軸を有効と見做します。
PLCで軸を制御します。
PLCで軸を制御しません。
位置を画面上に表示しません。
位置を画面上に表示します。
原点復帰の加減速信号がハイになる時に軸が加減速します。
原点復帰の加減速信号がロウになる時に軸が加減速します。
各軸のマシンロックを有効にします。
各軸のマシンロックを無効にします。
手動原点復帰時、ワーク座標系を必ずプリセットします。
手動原点復帰時、ワーク座標系をリセット状態(OP信号オフ)の場合に
のみプリセットします。
ALZ 自動原点復帰(G28)は
1 : 手動原点復帰と同じシーケンスでリファレンス点に復帰します。
0 : 位置決め(早送り)でリファレンス点に復帰します。
7-8
2.パラメータ一覧
1020
(AX)
NAME OF EACH AXIS
各制御軸のプログラム軸名称を次の表に従って設定します。ここで設定した順序に
よって制御軸番号が決定します。
たとえば、最初の軸は制御軸番号が1で、二番目の軸は制御軸番号が2です。
軸名称
X
Y
Z
1025
(AX)
設定値
88
89
90
軸名称
A
B
C
設定値
65
66
67
軸名称
U
V
W
設定値
85
86
87
2NAME OF EACH AXIS
2文字の軸名称機能を使用するときの2番目の文字を指定します。
設定値:0,65(A)〜90(Z)
1030
2ND AUXILIARY FUNCTION
第2補助機能を指定するアドレスを A,B,Cのどれに
するかを指定します。ただし軸名称として使用するア
ドレスを第2補助機能を指定するアドレスとして設定
できません。
1031
指令
A
B
C
設定値
65
66
67
STANDARD AXIS
ドライラン速度等の全軸に共通のパラメータ中には、単位が設定単位より異なるもの
があります。このようなパラメータの単位は基準軸の設定単位に対応させ基準軸を第
何軸にするかを制御軸番号で設定します。
設定値 : 1 ~ 5
注) 制御軸番号に対してはパラメータ1020を参照してください。
1032
(AX)
RELATES AXIS TO BCS
各軸が基本座標系のどの軸になるのかを設定します。
設定値
意味
0
回転軸
1
基本3軸のX軸
2
基本3軸のY軸
3
基本3軸のZ軸
5
X軸の平行軸
6
Y軸の平行軸
7
Z軸の平行軸
7-9
第7章 パラメータ
1034
LINEAR AXIS FOR POLAR
(M)
極座標補間を行なう軸(直線軸)を制御軸番号で指定します。
設定値 : 1~8
注) 制御軸番号に対してはパラメータ1020参照
1035
ROTARY AXIS FOR POLAR
(M)
極座標補間を行なう軸(回転軸)を制御軸番号で指定します。
設定値 : 1~5
注) 制御軸番号に対してはパラメータ1020参照
1040
(アンギュラ
研削機用)
ANGLE OF SLOPE AXIS
角度軸制御によるX軸の角度を設定します。
設定値 : -60000~20000, 20000~60000 単位 : 0.001deg
1041
初期値 : 30000
7
6
5
4
3
2
RPS
OSL
(G,M)
SDW
(C)
SAD
(C)
OSS
(G,M)
QTL
(C)
1
0
AGL
RPS リファレンス点復帰完了時およびG92座標設定実行時に相対座標を
1 : 絶対座標と同じ値に設定します。
0 : 絶対座標と同じ値に設定しません。
OSL 1 : オシレーション機能(G81.1)を有効にします。
0 : オシレーション機能(G81.1)を無効にします。
SDW ウォ-タ-ジェット用スローアップダウン(自動加減速)機能を
1 : 有効にします。
0 : 無効にします。
SAD 布団刺繍機用主軸加減速機能(フィードオーバライド機能)を
1 : 有効にします。
PLCで主軸ドオーバライド制御をするときに使用し、減速・加速区間をパ
ラメータ6613,6614番で設定します。
設定単位:0.1mm
低速クランプ値をパラメータ6610番で設定します。
設定単位:1%
0 : 無効にします。
OSS 1 : オシレーション加減速タイプはサインカーブ型です。
0 : オシレーション加減速タイプは直線型です。
QTL 1 : 布団キルト機機能を有効にします。
(G94の場合、インタロック信号の立ち上がりで移動を始めます。)
0 : 布団キルト機機能を無効にします。
(アンギュラ研削機用)
AGL 1 : 角度軸制御を有効にします。
0 : 角度軸制御を無効にします。
7-10
2.パラメータ一覧
7
1042
6
5
4
3
2
1
SAP
MPV
SPB
EON
SOV
(SPIN) (SPIN) (SPIN) (SPIN) (SPIN)
EAJ
0
CPS
EAJ オーバライド型ジョグ送り機能で
1 : G13,G14のかわりに、各軸PLC軸速度指令アドレス(G68,69)、(G78,G79)、
(G88,G89)にオーバライド値を出力すると各軸別々にオーバライドを実行で
きます。
0 : 現在全ての軸に対して共通してひとつのオーバライド値を設定。
SAP 1 : 全てのサンプルデータをセーブします。
0 : サンプル間のデータの成分(X, Yの移動距離)が同じなら1つのデータに
まとめてカウンタをカウントアップします。
MPV 1 : 位置データを基準にティーチングデータを管理します。
0 : VCmd基準でティーチングデータを管理します。
SPB SPA=0のときカウントアップしたサンプルデータを
1 : カウントした数だけのブロックに作成します。
0 : 1ブロックで作成します。
EON 1 : サーボオフ時、イネーブル信号を強制オン。
0 : サーボオフ時、イネーブル信号をオフ。
SOV 1 : サーボオフ機能を有効にします。
0 : サーボオフ機能を無効にします。
CPS 1 : チョッピングモードで自動停止を無効にします。
0 : チョッピングモードで自動停止を有効にします。
7
GTF
ZAP
DRZ
ZPB
JAC
SFZ
5
4
3
2
1
PST
GTF
ZAP
DRZ
ZPB
JAC
(SPIN) (SPIN) (SPIN) (SPIN) (SPIN) (SPIN)
1043
PST
6
1
0
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
:
:
セフティゾーン機能をPLCのGアドレスで操作します。
セフティゾーン機能をDKUで操作します。
ゲインコンスタントテーブルの使用を有効にします。
ゲインコンスタントテーブルの使用を無効にします。
ティーチングで全てのポイントを貯蔵します。
ティーチングで同一の移動ポイントを最適化し貯蔵します。
セフティゾーン座標をX-, Y- 次元で作成します。
セフティゾーン座標をX+, Y+ 次元で作成します。
ポイントを線分合成してブロックを生成します。
全てのポイントからブロックを生成します。
ジョイスティックからの入力を設定角度によって補正します。
ジョイスティックからの入力をそのまま出力します。
セフティゾーン機能有効。
セフティゾーン機能無効。
7-11
0
SFZ
(SPIN)
第7章 パラメータ
1044
TEACHING SAMPLING TIMES
(SPIN)
NCのインタラプト周期に対するサンプリング周期を設定します。
サンプリング周期[ms] = NCのインタラプト周期[10ms] × SAMPLING TIMES
設定値:0~100
1045
SAFETY ZONE X AXIS ANGLE
(SPIN)
X
X軸とZ軸の角度
Z
設定単位
IS-A
0.01
IS-B
0.001
IS-C
0.0001
単位
Deg
設定値 : 0 ~ 900000
1046
SAFETY ZONE X AXIS OFFSET
(SPIN)
セフティゾーンのトレース時のX軸オフセット量
直線軸(mm入力)
IS-A
0.01
設定単位
IS-B
0.001
IS-C
0.0001
単位
mm
設定値 : 0 ~ 1000000
1047
SAFETY ZONE Z AXIS OFFSET
(SPIN)
セフティゾーンのトレース時のZ軸オフセット量
直線軸(mm入力)
IS-A
0.01
設定単位
IS-B
0.001
設定値 : 0 ~ 1000000
7-12
IS-C
0.0001
単位
mm
2.パラメータ一覧
1048
SAFETY ZONE SAMPLING TIMES
(SPIN)
NCのインタラプト周期に対するサンプリング周期を設定します。(セフティゾーン)
サンプリング周期[ms] = NCのインタラプト周期(10ms) X サンプル時間
設定値 : 0 ~ 100
1049
SAFETY ZONE TRACE FEED
(SPIN)
セフティゾーン機能でゾーントレース時の送り速度を設定します。
設定値 : 0 ~ 600 単位 mm/min
1050
X AXIS ANGLE CORRECT ZONE (-)
(SPIN)
X軸のジョイスティクの角度補正範囲の最小値を設定します。
直線軸(mm入力)
IS-A
0.01
設定単位
IS-B
0.001
IS-C
0.0001
単位
mm
設定値 : -99999999 ~ 99999999
1051
X AXIS ANGLE CORRECT ZONE (+)
(SPIN)
X軸のジョイスティクの角度補正範囲の最大値を設定します。
直線軸(mm入力)
IS-A
0.01
設定単位
IS-B
0.001
IS-C
0.0001
単位
mm
設定値 : -99999999 ~ 99999999
1052
X AXIS VOLT RATE FOR DIRECT
(SPIN)
X軸の原点方向移動時に反対方向を基準にオーバロードします。
設定値 : 0 ~ 200
単位 %
0は機能無効、1 ~ 99は減速、101 ~ 200は加速
1053
Z AXIS VOLT RATE FOR DIRECT
(SPIN)
Z軸の原点方向移動時に反対方向を基準にオーバロードします。
設定値 : 0 ~ 200
単位 %
0は機能無効、1 ~ 99は減速、101 ~ 200は加速
1054
ANALOG OUTPUT DIF FILTER
ジョイスティク出力電圧監視時リミッタ。
設定値 : 0 ~ 300
7-13
(SPIN)
第7章 パラメータ
1055
AXIS VOLT RATE FOR X-Z +
(SPIN)
X軸、Z軸電圧比率 ( X +方向)
設定値 : 0 ~ 300
単位 %
1056
AXIS VOLT RATE FOR X-Z -
(SPIN)
X軸、Z軸電圧比率 ( X -方向)
設定値 : 0 ~ 300
単位 %
1057
PRESS SETTING DTABLE NO.
(SPIN)
圧力指定データテーブル番号
設定値 : 0 ~ 511
7
6
5
4
3
2
ABA
(G)
1058
1
DIG
NTL
(SPIN) (SPIN)
アブソリュートエンコーダと通信中にモータが
1 : 動くとアラーム(17200~17215)を出します。
0 : 動いてもアラームを出しません。
DIG
1 : ゴファ精鋼のスピニングマシンで“ㄷシイム加工”をします。
0 : ファ精鋼のスピニングマシンで“ㄷシイム加工”をしません。
NTL スピニングマシンのティーチング機能でマクロプログラムにTコードを
1: 出力しません。
0: 出力します。
ABA
1220
(AX)
WORK ZERO COMMON
各軸の外部原点オフセット量を指定します。
直線軸(mm入力)
直線軸(inch入力)
回転軸
0
IS-A
0.01
0.001
0.01
設定単位
IS-B
0.001
0.0001
0.001
設定値 : -99999999~+99999999
7-14
IS-C
0.0001
0.00001
0.0001
単位
mm
inch
deg
2.パラメータ一覧
1221
(AX)
WORK ZERO SFT #1
1222
(AX)
WORK ZERO SFT #2
1223
(AX)
WORK ZERO SFT #3
1224
(AX)
WORK ZERO SFT #4
1225
(AX)
WORK ZERO SFT #5
1226
(AX)
WORK ZERO SFT #6
ワーク座標系 : 1 - 6(G54~G59)のワーク原点オフセット量を設定します。
直線軸(mm入力)
直線軸(inch入力)
回転軸
IS-A
0.01
0.001
0.01
設定単位
IS-B
0.001
0.0001
0.001
IS-C
0.0001
0.00001
0.0001
単位
mm
inch
deg
設定値 : -99999999~+99999999
1240
(AX)
VALUE OF 1ST R POINT
1241
(AX)
VALUE OF 2ND R POINT
1242
(AX)
VALUE OF 3RD R POINT
1243
(AX)
VALUE OF 4TH R POINT
第1~第4原点の機械座標での座標値を設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~+99999999
1260
(AX)
MOVEMENT OF ROTARY
回転軸1回転あたりの移動量を設定します。
回転軸を使用時には必ず設定します。
回転軸
IS-A
0.01
設定単位
IS-B
0.001
設定値 : 0~99999999
7-15
IS-C
0.0001
単位
deg
第7章 パラメータ
1400
COR
LAI
7
6
5
4
3
2
1
0
COR
(M)
LAI
F05
FST
SKF
LRP
TDR
RDR
1 : 円弧半径によるフィードクランプ機能を有効にします。
ただし自動コーナオーバライド機能を使用することはできません。
0 : 円弧半径によるフィードクランプ機能を無効にします。
1 : 補間後の直線加減速機能を有効にします。
0 : 補間後の直線加減速機能を無効にします。
加減速時定数はパラメータ1622で設定します。
設定値 : 10 ~ 100
単位 : msec
F05 送り速度オーバライドを速度画面で選択する場合オーバライドを
1 : 5%ずつ増減します。
0 : 10%ずつ増減します。
FST 1 : フィードストップを有効にします。
0 : フィードストップを無効にします。
(フィードストップ機能に対してはパラメータ1832を参照)
SKF
LRP
TDR
RDR
1401
ADC
ACF
TRA
RP4
TR8
1 : スキップ機能の送り速度はパラメータ1428で設定された速度です。
0 : スキップ機能の送り速度はプログラムで指定されたFコードの速度です。
*ただし、パラメータ7200の HSSが0のときに有効です。また、スキップ信
号にはPLC-NCインターフェイス信号(SKIP1~4)を使用します。
1 : 位置決め(G00)は直線補間型位置決めです。 (工具通路は直線です。)
0 : 位置決め(G00)は非直線補間型位置決めです。 (各軸独立に早送りです。)
1 : ねじ切り指令、タッピング指令でドライランが有効です。
0 : ねじ切り指令、タッピング指令でドライランが無効です。
1 : 早送り指令でドライランが有効です。
0 : 早送り指令でドライランが無効です。
7
6
5
4
3
2
1
0
ADC
(C)
ACF
(C)
TRA
(C)
RP4
TR8
(C)
BVT
(C)
MR2
CAL
(C)
1 : 自動減速機能が有効です。 (レーザ切断機用)
0 : 自動減速機能が無効です。 (レーザ切断機用)
1 : 実際の送り速度出力が有効です。(レーザ切断機用)
0 : 実際の送り速度出力が無効です。 (レーザ切断機用)
1 : トレーシングファンクションが有効です。(レーザ切断機用)
0 : トレーシングファンクションが無効です。(レーザ切断機用)
リファレンス点復帰完了前は早送り速度が
1 : 1/4 になりません。
0 : 1/4 になります。
1 : 8チャンネルトレーシング機能有効(TRA=0のとき)。(レーザ切断機用)
0 : 8チャンネルトレーシング機能有効。(レーザ切断機用)
7-16
2.パラメータ一覧
BVT
MR2
CAL
1
0
1
0
1
0
:
:
:
:
:
:
1402
JF2
CRD
RTF
RBL
RF0
SMC
ROV
RAT
1403
ADR
RVG
ベベリングトレーシング機能有効。(レーザ切断機用)
ベベリングトレーシング機能無効。(レーザ切断機用)
手動早送り時速度がパラメータ設定値の1/2になります。
手動早送り時速度がパラメータ設定値の1/2になりません。
ハイトセンサの特性校正機能を有効にします。
ハイトセンサの特性校正機能を無効にします。
7
6
5
4
3
2
1
0
JF2
CRD
RTF
RBL
RF0
SMC
ROV
RAT
1
0
1
0
1
0
1
0
1
:
:
:
:
:
:
:
:
:
フィードオーバライド型JOG送りを使用します。
フィードオーバライド型JOG送りを使用しません。
面取り、自動コーナRでC,Rの小数点がなくても可能です。
面取り、自動コーナRでC,Rの小数点がなければ使用不可能です。
リターン機能時、送り速度で移動します。
リターン機能時、ドライラン速度で 移動します。
ベル型加減速を選択します。
直線型加減速を選択します。
早送りフィードオーバライド0で止めるようにします。
0
1
0
1
:
:
:
:
早送りフィードオーバライド0で止めないようにします。
手動運転で“早送り–送り”の変換(G6.7)を円滑に行います。
手動運転で“早送り–送り”の変換(G6.7)を既存どおりに行います。
早送りオーバライドを有効にします。
(パラメータ1400 LPR=0 のときだけ有効です。)
0 : 早送りオーバライドを無効にします。
1 : 早送り加減速のタイプを指数型にします。
0 : 早送り加減速のタイプを直線型にします。
7
6
ADR
RVG
5
4
3
2
1
0
TBE
OPT
PCA
JVR
RDA
1 : 法線方向制御(補正値有効型)有効。
0 : 法線方向制御(補正値有効型)無効。
1 : 直線型早送りオーバライドを有効にします。
(パラメータ1402 ROV=0 のときだけ有効です。)
0 : 直線型早送りオーバライドを無効にします。
TBE ベベリングトレーシング機能で各角度、厚さ別1点トレーシングデータを
1 : 編集可能。
0 : 編集不可能。
OPT ベベリングトレーシング機能で
1 : ひとつの測定点でトレーシング。
0 : 複数の測定点でトレーシング。
7-17
第7章 パラメータ
PCA
JVR
RDA
1404
BEB
ADS
TAF
A1C
A2C
TV2
TRV
1
0
1
0
1
0
:
:
:
:
:
:
プラズマ用高さセンサ校正データを作成。
従来の高さセンサ校正データを作成(マクロ変数使用)。
手動運転早送りでオーバライド型の速度変更を可能にします。
手動運転早送りでオーバライド型の速度変更はできません。
早送り選択数が4つです(RT0 ~ RT3)。
早送り選択数が3つで(RT0 ~ RT2).す。
7
6
5
4
3
2
1
0
BEB
ADS
TAF
A1C
A2C
TV2
TV1
TRV
1 : 法線方向制御をベベリング用加工物側に向いて行います。
0 : 法線方向制御をベベリング用加工物側に向いて行いません。
1 : G40.1, G41.1, G42.1の実行時、法線制御を行いません。
0 : G40.1, G41.1, G42.1の実行時、法線制御を行います。
画面にすべてのトレーシング軸の現在位置を
1 : ‘+’,’─‘ キーで軸を変えながら確認します。
電圧確認のために各トレーシング中移動命令の出力禁止機能は有効です。
G259.3~6でトレーシング軸表示が可能で表示をF159.0~3に出力します。
0 : 上記の機能を使わない。
1 : 指令速度を基準に加減速計数を計算します。
0 : RT0の速度を基準に加減速計数を計算します。
RAPIDの加減速時定数とFLを原点復帰モードの時だけ別に設定できるように
1 : します。
0 : しません。
– TV1
TV2
TV1
表示方法
TV, AVの表示方法の指定
0
0
等倍
0
1
1/10
1
0
1/100
1 : トレーシング機能の基準をプラズマ電圧で行います。
0 : トレーシング機能の基準をポジションで行います。
7-18
2.パラメータ一覧
7
6
5
4
3
2
1
1405
F10
F10
切削送り速度の最高速度を 240m/minに変更します。(0.001mm指令時)
分配周期
10msec
8msec
4msec
1413
(AX)
F10=1
F10=0
96 m/min
120 m/min
107 m/min
240 m/min
107 m/min
EACH AXIS MAX HANDLE FEED
ハンドル運転時の各軸のクランプ速度を設定します。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
IS-C
1.0
1.0
単位
mm/min
deg/min
設定値 : 0~32767
1414
N OF HANDLE FEED 1
1415
N OF HANDLE FEED 2
1416
N OF HANDLE FEED 3
手動ハンドル送りの倍率を設定します。
設定値 : 1~200
1422
(AX)
EACH AXIS MAX FEEDRATE
最大切削送り速度を軸ごとに設定します。
直線軸
回転軸
IS-A
100.0
100.0
設定単位
IS-B
10.0
10.0
設定値 : 1~6000
1423
0
(AX)
EACH AXIS MAX RAPID FEED
最大早送り速度を軸ごとに設定します。
直線軸
回転軸
IS-A
100.0
100.0
設定値 : 1~6000
7-19
設定単位
IS-B
10.0
10.0
IS-C
1.0
1.0
単位
mm/min
deg/min
第7章 パラメータ
1428
(AX)
SKIP FUNCTION FEEDRATE
スキップ機能(G31)の送り速度を設定します。このパラメータはパラメータ 1400の
SKFが“1”に設定された場合に有効です。
直線軸
回転軸
IS-A
100.0
100.0
設定単位
IS-B
10.0
10.0
IS-C
1.0
1.0
単位
mm/min
deg/min
設定値 : 1~32767
1494
REVERSE FEEDRATE
(C)
リトレース機能を使用する場合の逆行時の送り速度を設定します。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 1~32767
1500
(AX)
RAPID TRAVERSE RATE 0
1501
(AX)
RAPID TRAVERSE RATE 1
1502
(AX)
RAPID TRAVERSE RATE 2
各軸ごとの早送り速度(RT0~ RT2)を設定します。
直線軸
回転軸
IS-A
100.0
100.0
設定単位
IS-B
10.0
10.0
IS-C
1.0
1.0
単位
mm/min
deg/min
設定値 : 1~9800
( i タイプの場合は高速加工指定時には分配周期8msのとき1~12000、分配周期
4msのとき1~ 24000)
7-20
2.パラメータ一覧
1503
JOG FEED RATE
≀
1523
JOG FEED RATE
ジョグ送り速度を設定します. すべての軸が共通です。ジョグ画面が21段階の速度に
なります。 送り速度の上限値は次の式で求められます。
Vmax(mm/min) = モータ最大回転数 (rpm) × 1回転当りの移動量 (mm)
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
설정치 : 1 ~ 32767
1524
(AX)
EACH AXIS JOG FEEDRATE
フィードオーバライド型送りの各軸ジョグ送り速度(100%)を設定します。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 1~32767
1525
(AX)
RAPID TRAVERSE RATE 3
各軸ごとの早送り速度RT3を設定します。(但し No1403 RDA=1 のときだけ有効)
内容はNo1500 - 1502と同じです。
1526
(AX)
RPR RAPID TRAVERSE
原点復帰時の早送り速度3を設定します。(値が0のときは無効)
直線軸
回転軸
IS-A
100.0
100.0
設定値 : 0~9800
7-21
設定単位
IS-B
10.0
10.0
IS-C
1.0
1.0
単位
mm/min
deg/min
第7章 パラメータ
7
6
5
4
3
1601
OVB
1620
2
OVB
1 : ブロックオーバラップ機能を使用します。
0 : ブロックオーバラップ機能を使用しません。
TIME CONSTANT (RAPID)
(AX)
直線形早送り速度加減速の時定数を軸毎に設定します。
設定値 : 0~1000 単位 : msec
速度
早送り
早送り
速度
FL速度
時間
加減速
時定数
1621
FL (RAPID)
(AX)
切削送り速度加減速の時定数を軸毎に設定します。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1622
TIME CONSTANT (FEED)
(AX)
切削送り速度加減速の時定数を軸毎に設定します。
設定値 : 0~4000 単位 : msec
速度
(フィード、ジョグ、ねじ切り送り)
FL速度
時間
加減速
時定数
7-22
1
0
2.パラメータ一覧
1623
(AX)
FL (FEED)
切削送り速度加減速のFL速度を軸ごとに設定します。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1624
(AX)
TIME CONSTANT (JOG)
ジョグ送り速度加減速の時定数を軸ごとに設定します(パラメータ1622図参照)。
設定値 : 0~4000 単位 : msec
1625
(AX)
FL (JOG)
ジョグ送り速度加減速のFL速度を軸毎に設定します(パラメータ1622図参照)。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1626
(AX)
TIME CONSTANT (THREAD)
ねじ切り送り加減速の時定数を軸毎に設定します(パラメータ1622図参照)。
設定値 : 0~4000 単位 : msec
1627
(AX)
FL (THREAD)
ねじ切り送り加減速のFL速度を軸毎に設定します(パラメータ1622図参照)。
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1628
(AX)
TIME CONSTANT (OSCILATION)
オシレイション機能加減速の時定数を軸毎に設定します(パラメータ1622図参照)。
設定値 : 0~4000 単位 : msec
7-23
第7章 パラメータ
1629
(AX)
FL (OSCILATION)
オシレイション機能加減速のFL速度を軸毎に設定します(パラメータ1622図参照)。
IS-A
10.0
10.0
直線軸
回転軸
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1630
(AX)
TIME CONSTANT (MARKING)
(C)
マーキング加減速の時定数を軸毎に設定します(パラメータ1622図参照)。
設定値 : 0~4000 単位 : msec
1631
(AX)
FL (MARKING)
(C)
マーキング加減速のFL速度を軸毎に設定します(パラメータ1622図参照)。
IS-A
10.0
10.0
直線軸
回転軸
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 0~32767
1632
(AX)
TIME CONSTANT L (RAPID)
ベル形加減速(直線)の時定数を軸毎に設定します(パラメータ1633図参照)。
設定値 : 0~4000 単位 : msec
1633
(AX)
TIME CONSTANT S (RAPID)
ベル形加減速(曲線)の時定数を軸毎に設定します。
設定値 : 0~4000 単位 : msec
速度
Ts/2
Ts/2
Ta
7-24
時間(msec)
2.パラメータ一覧
1634
(AX)
TIME CONSTANT L (RPR)
軸毎に原点復帰モードの時のRAPIDの加減速時定数を設定します。
設定値 : 0~5000 単位 : msec
1635
(AX)
TIME CONSTANT S (RPR)
軸毎に原点復帰モードの時のRAPIDの時定数を設定します。
設定値 : 0~32767 単位 : msec
7-25
第7章 パラメータ
1800
(AX)
SERVO AXIS NO.
各制御軸が何番目の軸のI/Fに対応するのかを設定します。 普通は制御軸の番号と軸
I/Fの番号は同じ番号に設定します。 軸I/Fを使用しない場合には'0'を設定します。
同じ軸I/F番号が二つ以上設定された場合には小さい数の制御軸が有効です。
設定値 : 0~8(1~3, 5~7 : サーボ軸I/F, 4,8 : 主軸I/F)
設定例1. 旋盤(サーボ2軸(X,Z)+主軸)
1800
X
1
Z
2
C
4
(主軸)
設定例 2. ミーリング(サーボ3 軸(X,Y,Z)+ 主軸)
1800
X
1
Y
2
Z
3
C
4
(主軸)
設定例 3. マシニングセンタ(サーボ7軸(X,Y,Z,A,U,V,W)+ 主軸)
1800
X
1
Y
2
Z
3
A
4
U
5
V
6
W
7
C
8
(主軸)
1817
A
URO
1
(主軸I/Fをサーボ軸I/Fとして使用するときは1を設定します。)
1801
(AX)
ENCODER TYPE
エンコーダ毎回転当りのパルス数を設定します。
設定値: 100~1000000
単位 : PPR
1802
(AX)
MOVING MULTIPLY
モータの毎回転当りの移動距離を設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定値 : 0~32767
7-26
設定単位
IS-B
0.001
0.001
IS-C
0.001
0.001
単位
mm
deg
2.パラメータ一覧
1803
(AX)
POSITION LOOP GAIN
位置制御のループゲインを軸ごとに設定します。直線とか円弧等の補間(切削加工)を
する機械の場合には全軸と同じ値を設定します。
位置決めだけをする機械の場合には軸毎に異なる値を設定します。
ループゲインを大きい値にするほど位置制御の応答性は高くなりますが、あまりに大
きく設定ればサーボが不安定になります。
設定値 : 500~10000 単位 : 0.01/sec 標準値 : 3000
1804
(AX)
STOP POS ERR LIMIT
STOP位置から位置偏差の許容範囲を設定します。位置偏差量が停止時にその限界を越
える場合は、サーボアラームになりすぐに停止します。
設定値 : 1~5000 単位 : 検出単位(PULSE)
1805
(AX)
MOVING POS ERR LIMIT
位置偏差量限界値を軸ごとに設定します。位置偏差量が移動中にその限界を越える場
合は、サーボアラームになりすぐに停止します。
設定値 : 1~250000
Error
早送り速度 min × Encoder P ulse ×
×
Lim
tch mm rev × P osition Loop G ain s ×
単位 : 検出単位(PULSE)
1806
(AX)
SERVO OFF POS ERR LIMIT
サーボオフになった時の位置偏差量の限界値を設定します。
設定値 : 1~5000 単位 : 検出単位(PULSE)
1807
(AX)
GAIN CONSTANT
モータが1000RPMで回転するための速度指令電圧(V*1000)を設定します。
例) 4000 : 4Vで1000RPMのサーボモータの場合
設定値 : 1000~65535 単位 : mV/1000RPM 初期値 : 3500
1808
(AX)
INPOSITION WIDTH
インポジションの幅を軸ごとに設定します。機械位置位と指令位置の差がインポジ
ションの幅より小さい場合機械が指令位置に到達したと見做します。
設定値 : 1~255 単位 : 検出単位(PULSE)
7-27
第7章 パラメータ
1809
(AX)
RPR FEED LOW
リファレンス点復帰低速速度を設定します
直線軸
回転軸
IS-A
10.0
10.0
設定単位
IS-B
1.0
1.0
IS-C
0.1
0.1
単位
mm/min
deg/min
設定値 : 8~32767
1810
(AX)
RP SHIFT AMOUNT
リファレンス点復帰位置のシフト量を設定します。
設定値 : -1000000~1000000 単位 : 検出単位(PULSE)
1811
(AX)
BACK LASH COMPEN
バックラッシ補正量を軸ごとに設定します。電源投入後リファレンス点復帰と反対方
向に移動した時に最初にバックラッシ補正を行ないます。
設定値 : 0~32767
直線軸
回転軸
1812
(AX)
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
SERVO OFF DELAY TIME
非常停止時サーボオフ時間を遅らせる期間を設定します。 重力軸の場合、ブレーキが
がかかってからこの設定時間後サーボオフするので重力軸落下を防止します。
設定値 : 0~127 設定単位 : 10ms
1813
(AX)
PITCH INTERVAL
ピッチ誤差補正点の間隔を設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定値 : -99999999~99999999
7-28
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
2.パラメータ一覧
1814
MAG
HSP
RET
RDI
REV
MRW
(AX)
SAC
OHC
VOC
F1C
SOC
MYA
6
5
4
3
2
1
0
MAG
HSP
RET
RDI
REV
MRW
ISF
ISR
1 : マグネットスケールを使用します。
0 : マグネットスケールを使用しません。
1 : 高速位置決めをします。この場合パラメータ1825を設定します。
0 : 高速位置決めをしません。
リファレンス点復帰で減速後
1 : Zパルスを受けると移動方向を反対に変えます。
0 : Zパルスを受けても移動方向を反対に変えません。
1 : リファレンス点復帰方向を “-”にします。
0 : リファレンス点復帰方向を “+”にします。
1 : 回転軸を指定します。
0 : 回転軸を指定しません。
:0->1, 1->0 に変更するとモータ軸の回転方向が反対になります。
ISF
0
0
1
ISF
ISR
1815
7
(AX)
ISR
0
1
0
最小移動単位
0.001mm, 0.001deg
0.01mm, 0.01deg
0.0001mm, 0.0001deg
7
6
5
4
SAC
OHC
VOC
F1C
3
規格
IS-B
IS-A
IS-C
2
SOC
1
0
MYA
1 : オーバーロード、オーバーヒート、オーバーカレント、エンコーダ断線、
電圧アラーム、Vレディ オン/オフなどのアラームをキャンセルします。
この時、一般診断画面の 0007 EBL, PRDが 1になりますが、Pレディ、イ
ネーブル信号はオンしません。
0 : 上記のアラームをキャンセルしません。
1 : モータオーバーヒートチェックキャンセルを有効にします。
0 : モータオーバーヒートチェックキャンセルを無効にします。
1 : Vレディ オン/オフチェックキャンセルを有効にします。
0 : Vレディ オン/オフチェックキャンセルを無効にします。
1 : エンコーダ用フィードバックカウンターキャンセルを有効にします。
0 : エンコーダ用フィードバックカウンターキャンセルを無効にします。
1 : サーボオフエラーチェックキャンセルを有効にします。
0 : サーボオフエラーチェックキャンセルを無効にします。
YASKAWAのアブソリュートエンコーダの多回転データが0のとき多回転データを
1 : 1と見做します。
0 : 0と見做します。
7-29
第7章 パラメータ
1816
EMH
AVO
FVF
M10
ACP
VRA
ALB
(AX)
7
6
5
EMH
AVO
FVF
4
3
2
1
0
M10
ACP
VRA
ALB
1 : エンコーダパルス設定値100倍機能を有効にします。
パラメータ1801エンコーダタイプの設定単位は 0.01PPR
この機能が有効の場合パラメータ1802も設定単位が1/100になります。
0 : エンコーダパルス設定値100倍機能を無効にします。
パラメータ1801エンコーダタイプの設定単位は 1PPR
1 : EPS3のアナログ電圧出力機能を有効にします。
0 : EPS3のアナログ電圧出力機能を無効にします。
サーボオフ中フォロウアップを
1 : 有効にします。 (メカニカルハンドルを使用)
0 : 無効にします。
1 : パラメータ1802 厶ービングマルチプライの設定単位を10倍にします。
0 : パラメータ1802 厶ービングマルチプライの設定単位を10倍にしません。
Pレディオフ時にもサーボアラーム、エンコーダ断線、Vレディ オン/オフ
などのアラームを
1 : チェックしません。
0 : チェックします。
1 : Vレディ(サーボレディ)信号はA接点です。
0 : Vレディ(サーボレディ)信号はB接点です。
1 : Sサーボアラーム信号はA 接点です。
0 : サーボアラーム信号はB 接点です。
各サーボユニットの標準設定値
サーボユニット
1
2
3
YASKAWA SIGMA/
SIGMAⅡ SERIES
FDA-5001 ~ 04
LG FDA-5000 SERIES
FDA-5005 ~ 45
PANASONIC MINAS SERIES
7-30
ACP
VRA
ALB
0
1
0
0
1
0
1
0
1
0
2.パラメータ一覧
1817
(AX)
7
6
5
4
3
2
1
0
UR7
UR6
UR5
UR4
UR3
UR2
UR1
UR0
UR7 1 軸目が1 : インタラプトシステムエラー14004、14007番を無視します。
2 軸目が1 : インタラプトシステムエラー関連データ表示します。
3 軸目が1 : サーボ波形表示機能を細分化します。
4 軸目が1 : LANタイプDNC運転
5 軸目が1 : インタラプトシステムエラー13000 – を無視します。
UR6 1 : 簡易同期制御時にグリッドシフトも同期制御をします。
0 : 簡易同期制御時にグリッドシフトも同期制御をしません。
UR5 1 : パラメータ1810の意味を変えます。 1816 M10,1817 UR2により10倍、100
倍にします。( 9090 DB6 = 1 のとき1000倍まで有効 )
0 : パラメータ1810の意味を変えません。
UR4 1 : パラメータ1816の意味を変えます。( 1816 M10=1, 1817 UR2=1 のときだ
け有効です。) 厶ービングマルチプライの設定単位1000倍になります。
0 : パラメータ1816の意味を変えません。
UR3 1 : アブソリュートエンコーダを使用します。
0 : アブソリュートエンコーダを使用しません。
UR2 パラメータ1816の意味を
1 : 変えます。厶ービングマルチプライの設定単位100倍
0 : 変えません。厶ービングマルチプライの設定単位10倍
UR1 1 : Cs軸を有効にします。(UR0 = 1の時だけ有効)
0 : Cs軸を無効にします。
UR0 1 : 主軸I/Fをサーボ軸として使用します。
0 : 主軸I/Fをサーボ軸として使用しません。
1818
(AX)
7
6
5
4
3
2
1
0
AB7
AB6
AB5
SDR
DPF
GCT
(SPIN)
MDR
NDR
AB7 〜 AB5 : アブソリュートエンコーダメーカの指定。
(6409 B7 <AT2> = 1 の時 各軸のメーカが異る場合)
AB7
0
0
0
AB6
0
0
1
AB5
0
1
0
メーカ
PANASONIC
YASKAWA
MITSUBISHI
SDR デユアルポジションフィードバック機能使用時のスケール信号入力を
1 : 反転します
0 : 反転しません。
DPF 1 : デユアルポジションフィードバック機能を有効にします。
0 : デユアルポジションフィードバック機能を無効にします。
GCT 1 : ゲインコンスタントテーブルの対象軸にします。
0 : ゲインコンスタントテーブルの対象軸にしません。
7-31
第7章 パラメータ
MDR DEC信号を使用せずにリファレンス点復帰を実行するときに
1 : 回転軸時最短距離で実行します。
0 : 回転軸時一定方向で実行します。
NDR 1 : DEC信号を使用せずにリファレンス点復帰を実行します。
0 : DEC信号を使用せずにリファレンス点復帰を実行します。
1819
PDA
HVC
GC2
GC1
LSR
BTM
BAS
BAT
1821
(AX)
7
6
5
4
3
2
1
0
PDA
HVC
GC2
GC1
LSR
BTM
BAS
BAT
1 : PLCでアナログ出力をON/OFFできるようにします。
0 : PLCでアナログ出力をON/OFFできるようにしません。
1 : 油圧サーボの速度制御機能を使用します。
0 : 油圧サーボの速度制御機能を使用しません。
1 : パラメータ1807 GAIN CONSTANTの設定単位を100mvにします。
0 : パラメータ1807 GAIN CONSTANTの設定単位を100mvにしません。
1 : パラメータ1807 GAIN CONSTANTの設定単位を10mvにします。
0 : パラメータ1807 GAIN CONSTANTの設定単位を0.1mvにします。
1 : スケール原点復帰方式を使用します。
0 : スケール原点復帰方式を使用しません。
バックラシュ加速機能のサブマクロ制御で加速停止パルスカウント量を
1 : 100倍にします。
0 : 100倍にしません。
バックラシュ加速機能のサブマクロ制御で加速停止パルスカウント量を
1 : 10倍にします。
0 : 10倍にしません。
バックラシュ加速機能のサブマクロ制御で加速停止時間を
1 : 10倍にします。
0 : 10倍にしません。
(AX)
FEED FORWARD GAIN
フィードフォワードゲイン定数を設定します。
設定値 : 0~25000
1822
(AX)
DRIFT AMOUNT
パラメータ1823 "ADF=0"の場合ドリフト補正量を設定します。
設定値 : -2000~2000 単位 : velo(1velo=0.31mv)
7-32
2.パラメータ一覧
1823
ADF
DIA
AUG
ERC
P10
I10
NDC
1824
(AX)
1
0
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
:
:
(AX)
7
6
5
ADF
DIA
(L)
AUG
4
3
2
1
0
ERC
P10
I10
NDC
自動ドリフト補正を有効にします。
自動ドリフト補正を無効にします。
各軸の移動指令を直径指令にします。
各軸の移動指令を半径指令にします。
自動ゲイン補正を有効にします。
自動ゲイン補正を無効にします。
非常停止によりリファレンス点の位置を失います。
非常停止によりリファレンス点の位置を失いません。
パラメータ 1801のエンコーダタイプの設定単位を10倍にします。
パラメータ 1801のエンコーダタイプの設定単位を10倍にしません。
パラメータ 1808のインポジションの幅の設定単位が10倍になります。
パラメータ 1808のインポジションの幅の設定単位が10倍になりません。
DNC信号を使用せずに原点復帰を行います。
DNC信号を使用して原点復帰を行います。
ZERO PULSE WIDTH
軸エンコーダのゼロ信号(Z相信号)幅を設定します。
単位 : 検出単位(PULSE) 設定値 : 0~50
設定方法 : 最初に1824に0を設定して電源オフした後、もう一度電源投入します。
ファレンス点復帰をした後に軸移動をすれば診断0015番の値が表示されます。
移動方向が変化する時値も変わります。診断0015番に表示される最大値の符合のない
データを1824に設定します。 モータエンコーダの仕様によって決定されます。
예) FANUC AC モータ : 12
安川 AC モータ : 4
LG AC SERVO, PANASONIC MINAS AC SERVO
: 4
1825
(AX)
GAIN CHANGE POS ERR
高速位置決めを行なった位置偏差の最大値を設定します。
VCMD
単位 : 検出単位(PULSE)
設定値 : 0~25000
パラメータ1814 HSPが0の時に無効
高速位置決定の場合
通常
-POSERR
+POSERR
位置偏差
傾きが2倍になります
位置偏差とVCMDの関係
7-33
第7章 パラメータ
1826
(AX)
F/B PULSE CHECK DATA
電源投入時設定したデータ分実際にはサーボモータを回転させてフィードバックパル
スが正常に発生するかどうかチェックします。0を設定すればチェックしません。ブ
レーキ付きのモータの場合にはチェックが正常にできないので0を設定します。
設定範囲 : -500~500 標準値 : 50 設定単位 : 検出単位(PULSE)
1827
(AX)
BACK LASH MAX LIMIT
バックラッシ補正量の最大値を軸毎に設定します。この値を越えるとバックラッシ 補
正を分割して行ないます。( 0であれば以前の基準値を256設定します。)
設定値 : 0~256
直線軸
回転軸
1828
(AX)
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
ELECTRONIC GEAR A (NUMERATOR)
ギア比の分子(A)の値を設定します。回転軸、ギア比に端数が生じる時に使用します。
設定値 : 0~99999999 (4バイトデータ)
1829
(AX)
ELECTRONIC GEAR A (DENOMINATOR)
ギア比の分母(B)の値を設定します。回転軸、ギア比に端数が生じる時に使用します。
設定値 : 0~99999999 (4バイトデータ)
ギア比は0.01<=A/B<=100 の範囲になるようにします。
1832
(AX)
FEED STOP POSITION
フィードストップ位置偏差量を軸毎に設定します。
移動中に位置偏差量がフィードストップ位置偏差量を越えるとパルス分配と加減速制
御が一時停止します。位置偏差量がフィードストップ位置偏差量以下になればパルス
分配と加減速制御が再開されます。
設定値 : 0~32767 単位 : 検出単位(PULSE)
1833
(AX)
CLAMP VOLTAGE
油圧サーボの最小速度クランプ制御値を設定します。
設定値 : 0~32767
1834
(AX)
2ND INPOSITION WIDTH
GコードG64.1でinplevel=6 の時の G00 インポジションチェック値
設定値 : 0~32767 単位 : 検出単位(PULSE)
7-34
2.パラメータ一覧
1841
(AX)
GAIN CONSTANT TABLE 1
(SPIN)
1842
(AX)
GAIN CONSTANT TABLE 2
(SPIN)
1843
(AX)
GAIN CONSTANT TABLE 3
(SPIN)
1844
(AX)
GAIN CONSTANT TABLE 4
(SPIN)
1845
(AX)
GAIN CONSTANT TABLE 5
(SPIN)
1846
(AX)
GAIN CONSTANT TABLE 6
(SPIN)
1847
(AX)
GAIN CONSTANT TABLE 7
(SPIN)
1848
(AX)
GAIN CONSTANT TABLE 8
(SPIN)
1849
(AX)
GAIN CONSTANT TABLE 9
(SPIN)
各軸のゲインコンスタント値を設定します。
G262.0~G262.3の4ビットでテーブル番号を選択します。
設定値 : 0 ~ 4095
1860
(AX)
BL ACCEL VALUE
バックラッシ加速機能の加速量を設定します。
0を設定すれば機能が無効になります。
設定単位 : 3.05mV 設定値 : 0 ~ 4095 標準値 : 0
1861
(AX)
BL ACCEL TIME
バックラッシ加速機能の加速時間を設定します。
設定単位 : 分配周期(10msec) 設定値 : 0 ~ 127 標準値 : 0
1862
(AX)
BL ACCEL STOP
バックラッシ加速機能の加速停止する移動量を設定します。
移動方向反転後の移動量がこの値を越えると加速を停止します。
設定単位 : pulse 設定値 : 0 ~ 127 標準値 : 0
1863
(AX)
BL ACCEL VALUE 2
バックラッシ加速機能の加速量を設定します。(移動方向 + から - )
0を設定すれば機能が無効になります。
設定単位 : 3.05mV 設定値 : 0 ~ 4095 標準値 : 0
7-35
第7章 パラメータ
1864
(AX)
M_LINK AXIS SERVO NO
(SDI)
メカトロリンクサーボのアドレス番号を入力します。
設定値 : 0 ~ 8
7
1865
SG3
SG5
1870
6
5
(AX)
4
3
2
1
0
SG3
(SDI)
SG5
(SDI)
メカトロリンクサーボドライバーとしてYASKAWA MECHATROLINK ΣⅢを
1 : 指定します。
0 : 指定しません。(SG5も0の時はYASKAWA MECHATROLINK ΣⅡを指定)
メカトロリンクサーボドライバーとしてYASKAWA MECHATROLINK ΣⅤを
1 : 指定します。
0 : 指定しません。(SG3も0の時はYASKAWA MECHATROLINK ΣⅡを指定)
(AX)
DUAL POS FB IN
デユアルポジションフィードバックに使用するフルクローズドループのエンコーダの入
力ポートを制御軸番号として設定します。
例えばX軸(第1軸)のフルクローズドループの検出器を第5軸に接続する場合1870
番のパラメータに5を設定します。
8軸用NCの場合は最大8まで設定可能です。16軸用NCの場合は最大16まで設
定可能です。
デユアルポジションフィードバック制御機能を使用しないときは0を設定します。
設定値 : 0 ~ 16 標準値 : 0
1871
(AX)
DUAL POS FB A
1872
(AX)
DUAL POS FB B
デユアルポジションフィードバック機能でフルクローズドループに使用する検出器の信
号をセミクローズドループの検出器の単位に変換する比率を分子(1871)、分母
(1872)に設定します。
例)セミクローズドループの単位は0.00025mmで、フルクローズドループの単位が
0.001mmの場合、1mm移動することを考えるとセミクローズドループは4000
pulse、フルクローズドループは1000 pulse発生します。
A/B=4000/1000なので約分してA=4,B=1に設定します。
ポートを制御軸番号として設定します。
どちらか一方が0に設定されるた場合1:1の比率とみなします。
7-36
2.パラメータ一覧
1873
(AX)
DUAL POS FB TC
デユアルポジションフィードバック制御機能で誤差補正の一次遅延系の時定数を設定し
ます。32767を設定すると時定数が無限、すなわち補正がかかりません。
どちらか一方が0に設定されるた場合1:1の比率とみなします。
設定単位 : ms
設定値 : 0 ~ 32767 標準値 : 1000
1874
(AX)
DUAL POS ZERO WIDRH
デユアルポジションフィードバック制御機能で補正無視幅を設定します。
フルクローズドループのフィードバックとセミクローズドループのフィードバックの
差がこの設定値以下になると補正をしません。
設定単位 : セミクローズドループの検出単位
設定値 : 0 ~ 32767
標準値 : 10
1875
(AX)
CLOSED LOOP REF COUNTER
デユアルポジションフィードバック制御機能使用時のフルクローズドループのレファレ
ンスカウンタ値を各軸毎に設定します。
設定単位 : フルクローズドループの検出単位
設定値 : 0 ~ 32767
標準値 : 10000
1876
(AX)
CLOSED LOOP RP SHIFT
デユアルポジションフィードバック制御機能使用時のフルクローズドループの原点グ
リッドシフト量を各軸毎に設定します。
グリッド位置をシフトしたい場合、グリッドシフト量を設定します。
データの符号が+の場合グリッドは+方向に、データの符号が-の場合グリッドは-
方向にシフトされます。グリッドシフト量は1875番のレファレンスカウンタ値を越え
られません。
設定単位 : フルクローズドループの検出単位
設定値 : -32767 ~ 32767
標準値 : 0
1877
(AX)
RPR MASTER / SLAVE DIFF LIMI
同期制御軸の同期位置異常を原点復帰時に検出する検出値を設定します。
0の時、同期位置異常検出機能が無効になります。
設定値 : 0 ~ 32767
設定単位 : フ検出単位
1878
(AX)
VELOCITY CTRL P GAIN
Pゲインの設定値(パラメータ 1819 B6 <HVC>=1 のとき有効)。
設定値 : 0 ~ 32767
7-37
第7章 パラメータ
1879
(AX)
VELOCITY CTRL I GAIN
Iゲインの設定値(パラメータ 1819 B6 <HVC>=1 のとき有効)。
設定値 : 0 ~ 32767
7-38
2.パラメータ一覧
7
6
5
2000
OPS
STR
MMC
SWD
DLO
MNL
RAM
LWS
SQC
SSN
MSN
STR
1
0
1
0
1
0
1
0
1
0
1
:
:
:
:
:
:
:
:
:
0
1
0
1
0
1
0
:
:
:
:
:
:
:
6
5
4
3
2
1
0
EDT
MMC
SWD
DLO
MNL
RAM
LWS
SQC
バックグラウンドI/O 機能( SOFT DKU )を使用します。
バックグラウンドI/O 機能( SOFT DKU )を使用しません。
1ブロックに複数のMコード指令可能です。(最大4個)
1ブロックにMコード一つだけ指令可能です。
サーボ波形表示を有効にします。
サーボ波形表示を無効にします。
主軸負荷の表示を機械操作盤で行います。(OPTION)
主軸負荷の表示を画面で行います。
PLC診断画面でY信号を1に設定して出力信号をシーケンスに関係なく強制
的に出力します。
Y信号は実際設計されたシーケンスにより出力します。
PLCシーケンスのRAM運転を選択します。
PLCシーケンスのRAM運転を選択しません。
シーケンスコンパイルの時、ロウレベル分割を有効にします。
シーケンスコンパイルの時、ロウレベル分割を無効にします。
シーケンス編集機能を有効にします。
シーケンス編集機能を無効にします。
6
5
2003
TSN
OPS
2
7
7
BSN
3
1 : シーケンス番号検索中に自動運転中の信号をオンにします。
0 : シーケンス番号検索中に自動運転中の信号をオンにしません。
テープ編集モードからプログラム登録をサイクルスタート信号により行なう場合
(パラメータ2200, PARA. "RDS" 参照),自動運転起動中の信号を
1 : 出力します。
0 : 出力します。
2001
EDT
4
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
4
3
2
1
0
BSN
TSN
SSN
MSN
第2補助機能で"-"の使用を可能にします。
第2補助機能で"-"の使用を不可能にします
Tコードで"-"の使用を可能にします。
Tコードで"-"の使用を不可能にします。
Sコードで"-"の使用を可能にします。
Sコードで"-"の使用を不可能にします。
Mコードで"-"の使用を可能にします。
Mコードで"-"の使用を不可能にします。
7-39
第7章 パラメータ
2004
7
6
5
4
3
2
1
0
OF7
OF6
OF5
OF4
OF3
OF2
OF1
HOB
OF7 プログラム画面のF7ソフトキーに操作盤スイッチ(CLNT CAN)を
1 : 表示しません。
0 : 表示します。
OF6 プログラム画面のF6ソフトキーに操作盤スイッチ(CLNT MANU)を
1 : 表示しません。
0 : 表示します。
OF5 プログラム画面のF5ソフトキーに操作盤スイッチ(M01)を
1 : 表示しません。
0 : 表示します。
OF4 プログラム画面のF4ソフトキーに操作盤スイッチ(SNGL BLOK)を
1 : 表示しません。
0 : 表示します。
OF3 プログラム画面のF3ソフトキーに操作盤スイッチ(OPT SKIP)を
1 : 表示しません。
0 : 表示します。
OF2 プログラム画面のF2ソフトキーに操作盤スイッチ(DRY RUN)を
1 : 表示しません。
0 : 表示します。
OF1 プログラム画面のF1ソフトキーに操作盤スイッチ(CHIP CONV)を
1 : 表示しません。
0 : 表示します。
HOB 1 : ポジションコーダ減速比を2 : 75 にします。(ホビング機能パラメータ)
0 : ポジションコーダ減速比を1 : 1にします。
2010
SEQ COMPILE LOW LEVEL SEPARATE UNIT
シーケンスコンパイルをする時のLOWレベル分割ステップ数。
設定値 : 100~4000
2011
ABSOLUTE ENCODER RP TOLERA
アブソリュートエンコーダの原点位置誤差範囲。
設定値 : 0~100
7-40
2.パラメータ一覧
2020
(AX)
OP PANEL PLUS BUTTON
ソフトウェアオペレータズパネルで手動送り + 方向を指令するMDIパネルの数字
キー番号を軸毎に設定します。
10~13を使用するためにはパラメータ8011番の0ビット(OPK)が1でないといけませ
ん。
10のキー:"0"、11のキー:"."、12のキー:"/"、13のキー:"-"
設定値 : 0~13 単位 : 整数
2021
(AX)
OP PANEL RPR BUTTON
ソフトウェアオペレータズパネルで手動リファレンス点復帰送り方向を指令する MD
Iパネルの数字キー番号を軸毎に設定します。
10~13を使用する方法はパラメータ2021番と同じです。
設定値 : 0~13 単位 : 整数
2030
ALLOWABLE DIGITS M
2031
ALLOWABLE DIGITS S
2032
ALLOWABLE DIGITS T
2033
ALLOWABLE DIGITS 2ND
M,S,Tコード、第2補助機能の許容桁数を設定します。
設定値 : 1~8 単位 : 整数
2034
FEED OVERRIDE STEP
フィードオーバーライド/ジョグフィードのバー表示ステップ数の最大値を設定しま
す。
設定範囲 : 0~21 標準設定値 ソフトオペレータズパネル:21
ハードオペレータズパネル:15
2049
WORK NO. SEARCH METHOD
0~99 : その数値をプログラム番号の上2桁にして、サーチを行います。
(下2桁は、ワークナンバーサーチのための入力信号の値)
0未満または100以上 : ワークナンバーサーチのための入力信号で指定された値を、プ
ログラム番号の下2桁桁にして、昇順でサーチを行う。
設定値 : -127~127
7-41
第7章 パラメータ
2200
DGD
RDS
PAL
NM9
NPE
RAL
REP
RDL
DEL
LSP
MRH
ND9
NE9
6
5
4
3
2
1
0
DGD
RDS
PAL
MN9
NPE
RAL
REP
RDL
1 : DNCモードで“GRAPH"メニューを表示します。
0 : DNCモードで“GRAPH"メニューを表示しません。
加工プログラム編集モードでサイクルスタート信号によるプログラムの登録は
1 : 有効です。
0 : 無効です。
外部I/O機器制御でプログラムをパンチする場合
1 : 全プログラムをパンチします。
0 : 1プログラムのみパンチします。
1 : プログラム登録においてM99をプログラムエンドと見なしません。
0 : プログラム登録においてM99をプログラムエンドと見なします。
プログラム登録においてM02, M30, M99をプログラムエンドと
1 : 見なしません。
0 : 見なします。
外部I/O機器制御、サイクルスタート信号でプログラムを登録する場合に
1 : 全プログラムを登録します。
0 : 1プログラムのみ登録します。
既に登録されているプログラムと同じプログラム番号を持つプログラムを登録し
ようとした場合
1 : 既に登録されているプログラムを削除してから登録します。
0 : アラームにします。
全ログラムを一度に登録する場合
1 : 既に登録されているプログラムを削除してから登録します。
0 : 既に登録されているプログラムの後に登録します。
2201
HSC
7
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
7
6
5
4
3
2
1
HSC
DEL
LSP
MRH
ND9
NE9
PDR
高速固定サイクルを有効にします。
高速固定サイクルを無効にします。
編集モードプログラム一覧表で“削除”メニューを表示しません。
編集モードプログラム一覧表で“削除”メニューを表示します。
大きさが5メガバイト以上のプログラムの編集を禁止します。
大きさが5メガバイト以上のプログラムの編集を禁止しません。
総合稼動時間の修正を可能にします。
総合稼動時間の修正を不可能にします。
プログラム番号O9000~O9999のプログラムを実行中は表示しません。
プログラム番号O9000~O9999のプログラムを実行中でも表示します。
プログラム番号O9000~O9999のプログラムの編集を禁止します。
プログラム番号O9000~O9999のプログラムの編集を禁止しません。
7-42
0
2.パラメータ一覧
PDR
1 : 電源投入時のプログラム画面は一覧表が表示されます。
0 : 電源投入時のプログラム画面はプログラムが表示されます。
7
6
2202
5
4
3
MSD
MSD
DTL
HCH
MBL
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
2
1
0
DTL
HCH
MBL
サイクルタイムを10msec単位で表示します。
サイクルタイムを秒単位で表示します。
相対位置表示は工具補正長で移動した量を除外した値で表示します。
相対位置表示は工具補正長で移動した量を除外せずに表示します。
自動運転プログラム表示を小さい文字で行います。
自動運転プログラム表示を大きい文字で行います。
あらかじめ解析するプログラムブロック数を100個にします。
あらかじめ解析するプログラムブロック数を4個にします。
2203
7
6
5
4
3
2
1
0
COL
TCC
RC2
RC1
RC0
TC2
TC1
TC0
カラー表示方法
COL
TCC
1
1
工具交換する度に色を変えて切削送り経路を表示します。
0
1
工具経路表示をTC0 - TC2で指定した色で表示します
1
0
0
0
早送り、切削送りを各々RC0-RC2, TC0-TC2で指定した色で表示します。
工具交換する度に色を変えて経路を表示します。
RC2
0
0
0
0
1
1
1
1
RC1
0
0
1
1
0
0
1
1
RC0
0
1
0
1
0
1
0
1
カラー
黄色
赤色
緑色
白色
空色
紫色
青色
黒色
TC2
0
0
0
0
1
1
1
1
TC1
0
0
1
1
0
0
1
1
TC0
0
1
0
1
0
1
0
1
カラー
黄色
赤色
緑色
白色
空色
紫色
青色
黒色
注) TCC=1の場合電源オン後最初のカラーはTC0~2により指定されたカラーです。
工具交換をするごとに上の表の順序でカラーが変わります。例えば緑色から始ま
ると次は白色、その次は空色、紫と変わります。ただし、この場合黒色は無視さ
れて青色の次は黄色になります。
2210
PARAMETER DISPLAY AXIS
保守設定、操作設定画面の表示軸数を設定します。
設定値 : 1~8
7-43
第7章 パラメータ
2211
POSITION DISPLAY AXIS
位置, 速度命令画面の表示軸数を設定します。
設定値 : 1~8
2400
7
6
5
4
DPF
(L)
GSC
(L)
GSB
(L)
DWL
3
2
1
0
DPQ
SCA
DPI
DPF
小数点がないフィードが指令されたときには、
1 :1mm/min単位と認識します。
0 : 入力単位と認識します。
GSC / GSB
GSC
0
0
1
DWL
DPQ
SCA
DPI
2401
GSB
0
1
0
指令 Gコード選択
G コード体系 A
G コード体系 B
G コード体系 C
1 : 毎分送りモード(G94)では毎秒ドウェルを
毎回転送りモード(G95)では毎回転ドウェルをします。
0 : 常に毎秒ドウェルをします。
1 : G32が指令された状態でQアドレスに対する小数点処理をします。
0 : 小数点は使用できません。内部単位は、0.0001degです。
1 : ねじ切り開始角度を0.001deg単位で指定します。
0 : ねじ切り開始角度を1deg単位で指定します
1 : 小数点入力は電卓形方式でします。
0 : 小数点入力は従来方式でします。
プログラム指令
電卓形方式
従来方式
X1000
1000 mm
1 mm
X1000.
1000 mm
1000 mm
7
6
5
4
G64
NCM
G18
G95
3
2
1
0
G90
G01
G64 未使用
NCM 1 : リセットによって次のモーダル情報をクリアしません。
0 : リセットによって次のモーダル情報をクリアします。
G00~G03, G17~G19, G43~G49, G54~G59, G90~G91,
G93~G95, G96~G97, F, H, S, Tコ-ド
G18
1 : 電源投入時およびクリア状態時はG18モードです。(ZX平面)
G95
0 : 電源投入時およびクリア状態時はG17モードです。(XY平面)
1 : 電源投入時およびクリア状態時はG95モードです。(毎回転送り)
0 : 電源投入時およびクリア状態時はG94モードです。(毎分送り)
7-44
2.パラメータ一覧
G90
G01
2410
1
0
1
0
:
:
:
:
電源投入時およびクリア状態時はG90モードです。(アブソリュート指令)
電源投入時およびクリア状態時はG91モードです。(インクリメンタル指令)
電源投入時およびクリア状態時はG01モードです。(直線補間)
電源投入時およびクリア状態時はG00モードです。(位置決め)
ARC RADIUS ERROR
円弧補間の指令で、始点での半径値と終点での半径値の差として許容できる 限界値を
設定します。
ミリ入力
設定単位
IS-B
0.001
IS-A
0.01
IS-C
0.0001
単位
mm
設定値 : 0~99999999
2426
WORK COUNT UP M CODE
ワーク数をカウントアップするMコードを設定します。0の時は無効です。
設定値 : 0~97
2900
DOUBLE TURRETS DISTANCE
(L)
対向刃物台ミラーイメージの機能を使用する場合、対向刃物台間の距離(半径)を設定
します。
ミリ入力
IS-A
0.01
設定単位
IS-B
0.001
設定値 : -99999999 ~ +99999999
7-45
IS-C
0.0001
単位
mm
第7章 パラメータ
5001
IO I/F NO. (RS232C 1)
RS232C 1 に接続されるI/Oデバイス番号を設定します。I/O機器番号 1~6 に対応す
る機器の使用をパラメータ5110~5162で設定します。
設定値 : 1~6
5002
IO I/F NO. (RS232C 2)
RS232C 2 に接続されるI/Oデバイス番号を設定します。I/O機器番号 1~6 に対応す
る機器の使用をパラメータ5110~5162で設定します。
設定値 : 1~6
5110
DEVICE NUMBER 1
デバイス番号 1に対応するI/Oデバイスの仕様番号を設定します。
仕様番号
1
2
3
4
I/Oデバイスの仕様
コントロールコード(DC1-DC4)を使用してパンチとしてフィードを出力する。
コントロールコード(DC1-DC4)を使用せずパンチとしてフィードを出力する。
コントロールコード(DC1-DC4)を使用してパンチとしてフィードを出力しない。
コントロールコード(DC1-DC4)を使用せずパンチとしてフィードを出力しない。
設定値 : 1~4
5111
STOP BITS 1
デバイス番号 1に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5112
BAUD RATE 1
デバイス番号 1に対応するI/Oデバイスのボーレートを設定します。
設定番号 ボーレート (BPS)
8
1200
9
2400
10
4800
11
9600
設定値 : 8~15
7-46
設定番号
12
13
14
15
ボーレート (BPS)
19200
38400
57600
115200
2.パラメータ一覧
5120
DEVICE NUMBER 2
デバイス番号2に対応するI/Oデバイスの仕様番号を設定します。
設定値 : 1~4
5121
STOP BITS 2
デバイス番号2に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5122
BAUD RATE 2
デバイス番号2に対応するI/Oデバイスのボーレートを設定します。
設定値 : 8~13
5130
DEVICE NUMBER 3
デバイス番号3に対応するI/Oデバイスの仕様番号を設定します。
設定値 : 1~4
5131
STOP BITS 3
デバイス番号3に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5132
BAUD RATE 3
デバイス番号3に対応するI/Oデバイスのボーレートを設定します。
設定値 : 8~13
5140
DEVICE NUMBER 4
デバイス番号4に対応するI/Oデバイスの仕様番号を設定します。
設定値 : 1~4
5141
STOP BITS 4
デバイス番号4に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5142
BAUD RATE 4
デバイス番号4に対応するI/Oデバイスのボーレートを設定します。
設定値 : 8~13
7-47
第7章 パラメータ
5150
DEVICE NUMBER 5
デバイス番号5に対応するI/Oデバイスの仕様番号を設定します。
設定値 : 1~4
5151
STOP BITS 5
デバイス番号5に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5152
BAUD RATE 5
デバイス番号5に対応するI/Oデバイスのボーレートを設定します。
設定値 : 8~13
5160
DEVICE NUMBER 6
デバイス番号6に対応するI/Oデバイスの仕様番号を設定します。
設定値 : 1~4
5161
STOP BITS 6
デバイス番号6に対応するI/Oデバイスのストップビット数を設定します。
設定値 : 1~2
5162
BAUD RATE 6
デバイス番号6に対応するI/Oデバイスのボーレートを設定します。
設定値 : 8~13
7
5200
PTS
POT
PCO
OUT
6
5
PTS
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
4
3
2
1
0
POT
PCO
OUT
(L)
自動運転時、プログラムを先頭から実行します。
自動運転時、プログラムをカーソルのある位置から実行します。
G2.7信号<SLA>による禁止区域変換を有効にします。
G2.7信号<SLA>による禁止区域変換を無効にします。
移動前にあらかじめソフトオーバーリミットトラベルをチェックします。
移動前にあらかじめソフトオーバーリミットトラベルをチェックしません。
ストアードストロークリミット3の外側を禁止領域とします。
ストアードストロークリミット3の内側を禁止領域とします。
7-48
2.パラメータ一覧
7
5210
6
5
4
3
(AX)
2
1
0
OT1
OT3
OT2
OT1
1 : ストアードストロークリミット1の軸毎のチェックを行いません。
0 : ストアードストロークリミット1の軸毎のチェックを行います
OT3 ストアードストロークリミット3の内側を禁止領域とする設定をした場合、軸毎
にストアードストロークリミット3のチェックを
1 : 行います。
0 : 行いません。
OT2 1 : ストアードストロークリミット2の軸毎のチェックを行います。
0 : ストアードストロークリミット2の軸毎のチェックを行いません。
(ストアードストロークリミットは常に内側を禁止領域とします。
5220
(AX)
STROKE LIMIT 1_1 VALUE +
ストアードストロークリミット1の+方向の座標値を軸毎に設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~99999999
5221
(AX)
STROKE LIMIT 1_1 VALUE -
ストアードストロークリミット1の-方向の座標値を軸毎に設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~99999999
5222
(AX)
STROKE LIMIT 2 VALUE +
ストアードストロークリミット2の+方向の座標値を軸毎に設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定値 : -99999999~99999999
7-49
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
第7章 パラメータ
5223
(AX)
STROKE LIMIT 2 VALUE -
ストアードストロークリミット2の-方向の座標値を軸毎に設定します。
직 선 축
회 전 축
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~99999999
5224
(AX)
STROKE LIMIT 3 VALUE +
(L)
ストアードストロークリミット3の+方向の座標値を軸毎に設定します。
직 선 축
회 전 축
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~99999999
5225
(AX)
STROKE LIMIT 3 VALUE -
(L)
ストアードストロークリミット3の-方向の座標値を軸毎に設定します。
直線軸
回転軸
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -99999999~99999999
5226
(AX)
STROKE LIMIT 1_2 VALUE +
G2.7が1ならストアードストロークリミット1の2番目の+方向の座標値を軸毎に設定
します。
直線軸
回転軸
IS-A
0.01
0.01
設定値 : -99999999~99999999
7-50
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
2.パラメータ一覧
5227
(AX)
STROKE LIMIT 1_2 VALUE -
G2.7が1ならストアードストロークリミット1の2番目の-方向の座標値を軸毎に設定
します。
直線軸
回転軸
IS-A
0.01
0.01
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
設定値 : -99999999~99999999
5420
(AX)
PITCH ERROR OF R POINT
軸毎のリファレンス点のピッチ誤差補正点の番号を設定します。
設定値 : 0~639
5421
(AX)
PITCH ERROR NEAREST -
軸毎の最も-側のピッチ誤差補正点の番号を設定します。
設定値 : 0~639
5422
(AX)
PITCH ERROR NEAREST +
軸毎の最も+側のピッチ誤差補正点の番号を設定します。
設定値 : 0~639
5430
Z SIGNAL INTERVAL TOLERANCE
パルスカウントミスのインターバル許容値を設定します。
設定値 : 0~1000 単位:パルス
5431
Z SIGNAL POSITION TOLERANCE
パルスカウントミスのポジション許容値を設定します。
設定値 : 0~1000 単位:パルス
7-51
単位
mm
deg
第7章 パラメータ
5603
PDC
P20
RPR
MDR
PDR
PP1,
RSC
7
6
5
4
3
2
1
0
PDC
P20
(L)
RPR
MDR
PDR
PP1
PP0
RSC
1 : ポジションコーダの断線チェックを行いません。
0 : ポジションコーダの断線チェックを行います。
1 : 旋盤の回転当り送り用ポジションコーダに2000 PPRを使用します。
0 : 旋盤の回転当り送り用ポジションコーダに1024 PPRを使用します。(標準)
1 : リジットタップ開始時に主軸のリファレンス点復帰を行いません。
0 : リジットタップ開始時に主軸のリファレンス点復帰を行います。
速度指令電圧が+の場合の主軸回転方向は
1 : CCW ※リジットタップ中の主軸回転方向が反対の場合 0 -> 1または
0 : CW 1 -> 0に設定して主軸回転方向を合わせる。
主軸CW回転時のポジションコーダ発生パルスの方向は
1 : CCW
0 : CW
PP0 リジットタップ用ポジションコーダの主軸1回転当りの発生パルス数を
指定します。
6505番 <PP2> と共に使用します。
内容は6505番 <PP2> を参照してください。
周速一定制御中の位置決め指令 (G00 等)では
1 : 現在位置を使わず、終点座標値を使って周速一定制御を行う。
0 : 現在位置を使って周速一定制御を行う。
5605
7
6
PP2
DSO
5
4
3
2
1
0
WHT
AN2
AN1
IDM
(L)
IOR
(L)
PP2 5603番の<PP1>,<PP0>と共に使用してスピンドルポジションコーダのタイプを
指定。
PP2
0
0
0
0
1
PP1
0
0
1
1
0
PP0
0
1
0
1
0
スピンドルポジションコーダのタイプ
256 PPR
512 PPR
1024 PPR
2048 PPR
400 PPR
DSO 自動運転画面のS指令の表示で
1 : オーバライドを含めた値を表示します。
0 : オーバライドを含めない値を表示します。
WHT 1 : 第2主軸の高速タッピング機能を使用します。
0 : 第2主軸の高速タッピング機能を使用 しません。
AN2 1 : アナログアウトプット2 (PNC2 #2)出力を有効にします。
0 : アナログアウトプット2 (PNC2 #2)出力を無効にします。
7-52
2.パラメータ一覧
AN1
1 : アナログアウトプット1 (PNC2 #1)出力を有効にします。
0 : アナログアウトプット1 (PNC2 #1)出力を無効にします。
IDM 主軸位置決めにおける正負の選択
1 : マイナス方向に位置決めします。
0 : プラス方向に位置決めします。
IOR 主軸位置決めモード中にリセットをかけた時
1 : リセットにて主軸位置決めモードが解除されません。
0 : リセットにて主軸位置決めモードが解除されます。
5610
SPINDLE ACTUAL SPEED AXIS
NC軸をPLC軸を利用してスピンドルのように使用する場合の実速度を表示する軸の番
号を指定します。
設定値 : 1~8
5614
SPINDLE GAIN ADJUSTMENT
リジットタップ時の主軸およびZ軸の位置ループゲインを設定します。
設定値 : 0~4000 単位 : 0.01/SEC
5615
SPINDLE ORIENT SPEED
リジットタップ開始時の主軸のリファレンス点復帰速度を設定します。
設定値 : 10~500 単位 : rpm
5616
SPINDLE RP SHIFT
リジットタップ開始時の主軸のリファレンス点復帰位置のシフト量を設定します。
設定値 : 0~4095 単位 : 検出単位
5640
CONST SURFACE SPEED CTRL
周速一定制御を第何軸目で行うかをを設定します。
設定値 : 0~3 ("0" を設定した場合は常にX軸で周速一定制御が行なわれます。)
5641
SPINDLE ENCODER
ポジションコーダパルス数をパラメータで設定します。
設定値 : 0~8000
("0" を設定した場合は従来どうりです。)
5642
(AX)
AVO PRM OUTPUT ADDRESS (RELAY)
アナログ出力時、エンコーダ値で回転数計算した値を出力するRアドレス値。
設定値 : 0~498
7-53
第7章 パラメータ
5644
LOAD VOLTAGE OF 100% 1/100
LOAD 1の負荷率100%の電圧(1/100)。
設定値 : 0~1000.
5645
LOAD RAD NO. 1
LOAD 1の電圧入力番号。
0 : 無効 / 1~8 : RAD1~8 / 9: 無効 / 10 : EPS4_1
設定値 : 0~11
5646
/ 11 : EPS4_2
LOAD VOLTAGE OF 100% 1/100
LOAD 2の負荷率100%の電圧(1/100)。
設定値 : 0~1000.
5647
LOAD RAD NO. 2
LOAD 2の電圧入力番号。
0 : 無効 / 1~8 : RAD1~8 / 9: 無効 / 10 : EPS4_1
設定値 : 0~11
5680
/ 11 : EPS4_2
M SPINDLE ORIENTATION
主軸旋回モードから主軸位置決めモードに移行させるためのMコードを設定します。
設定値 : 6~97
5681
M CANCEL POSITIONING
主軸位置決めモードを解除して主軸旋回モードに移行させるためのMコードを設定しま
す。
設定値 : 6~97
5682
M SPINDLE POSITIONING BY M
Mコードによる主軸位置決め(半固定角度の割出し)のMコードを設定します。
指令できる値は M(5682)~M(5682)+5 の 6通りができます。
設定値 : 6~92
5683
BASIC ROTATION ANGLE
Mコードによる主軸位置決めにおける基本回転角度を設定します。
設定値 : 1~60 単位 : deg
7-54
2.パラメータ一覧
5691
SPINDLE GAIN LOOP (GEAR1)
リジットタップでの主軸ゲイン定数を設定します。
ゲイン定数は主軸が1000RPM回転時の速度指令電圧です。
例) 速度指令 10 VOLT出力時 6000RPM で回転する場合
10 ×1000 / 6000 = 1666
設定値 : 0~32767 単位 : mV
5692
SPINDLE GAIN LOOP (GEAR2)
5693
SPINDLE GAIN LOOP (GEAR3)
5694
SPINDLE GAIN LOOP (GEAR4)
5691と同じ。
5751
TIME CONSTANT (RIGID GR1)
リジットタップモードでの主軸停止状態の位置偏差量の限界値を設定します。
主軸速度
S MAX
(パラメター5776番)
時間
加減速
時定数
設定値 : 10~1270
5752
単位 : msec
STOP POS ERR LIMIT
リジットタップモードでの主軸停止状態の位置偏差量の限界値を設定します。
停止時に位置偏差量がこの限界値を越えるとアラームとなります。
設定値 : 10~4000 単位 : 検出単位 標準値 : 500
7-55
第7章 パラメータ
5754
MOVING POS ERROR LIMIT
リジットタップモードでの主軸の位置偏差量の限界値を設定します。
移動時に位置偏差量がこの限界値を越えるとアラームとなり、一時停止します。
設定値は次のように計算します。
設定値 = 1.2 × S ×N ×4 / (G ×60)
ただし S : リジットタップでの主軸最高回転数(RPM)
N : 主軸 1回転当りの発生パルス数(NC内部で4倍する前の値)[PPR]
G : 主軸位置ループゲイン[1/sec]
設定値 : 100~25000 単位 : 検出単位 5755
INPOSITION WIDTH
リジットタップでの主軸インポジションの幅を設定します。 主軸位置と指令位置の差
がインポジションの幅よりも小さい場合主軸が指令位置に到達したと見做します。
設定値 : 0~127 単位 : 検出単位 標準値 : 20
5756
BACKLASH COMPEN
リジットタップでの主軸バックラッシ補正量を設定します。
設定値 : 0~127 単位 : 検出単位
5757
M RIGID TAPPING
リジットタップモードを指令するMコードを設定します。
設定値 : 0~127 標準値 : 29
5758
TAP RETURN RPM (M)
リジットタップリターン時のRPMを設定します。
設定値 : 0~10000 標準値 : 0 (無効)
5761
TIME CONSTANT (RIGID GR2)
5762
TIME CONSTANT (RIGID GR3)
5763
TIME CONSTANT (RIGID GR4)
5751 参照
7-56
2.パラメータ一覧
5766
S MAX SPEED (RIGID GR1)
5767
S MAX SPEED (RIGID GR2)
5768
S MAX SPEED (RIGID GR3)
5769
S MAX SPEED (RIGID GR4)
リジットタップでの主軸許容最高回転数を設定します。
設定値 : 0~4000 単位 : RPM
5770
MANUAL RIGID TAP AXIS NO. (M)
手動リジットタップ軸を設定します。
設定値 : 0~16 標準 : 3 (Z軸)
5771
MANUAL RIGID TAP LEAD (M)
手動リジットタップリードを設定します。
設定値 : 32767~32767 単位 : 0.001mm
7-57
第7章 パラメータ
6000
OFH
LWM
LD1
LVK
LXY
PC1
PNH
EVO
6001
7
6
5
OFH
(M)
LMW
(L)
LDI
(L)
4
3
2
1
0
LVK
LXY
(M)
PCI
(M)
PNH
(M)
EVO
1 : 工具径補正に“H”を使用します。
0 : 工具径補正に“D” を使用します。
未使用
1 : 工具位置オフセットのオフセット番号はTコードの下1桁で指定します。
0 : 工具位置オフセットのオフセット番号はTコードの下2桁で指定します。
工具長補正(旋盤系では工具位置補正)ベクトルはリセットにより
1 : クリアされずに保持されます。
0 : クリアされます。
工具長補正(G43, G44)を行う軸は
1 : プログラムで指定された任意の軸です。
0 : 常にZ軸です。
1 : 工具位置補正(G45~G48)は円弧指令にも有効です。
0 : 工具位置補正(G45~G48)は円弧指令にも無効です。
1 : 工具位置補正(G45~G48)のオフセット番号をHコードで指定します。
0 : 工具位置補正(G45~G48)のオフセット番号をDコードで指定します。
オフセット量を変更した場合
1 : 次にバッファリングされるロックから有効です。
0 : 次にDまたはHコード(旋盤系ではTコード)が指令されたブロックから有効です。
7
6
5
4
3
2
1
0
DRZ
(M)
CNI
LGC
(L)
LGN
(L)
LWT
(L)
LGT
(L)
CNC
CSU
DRZ ドライラン時に工具長補正量にパラメータ6223の値を加えて
1 : 工具長補正をします。(工具長補正シフト機能)
0 : 工具長補正をしません。
CNI 1 : 工具径補正C(M)または刃先R補正(L)の干渉チェックを行いません。
0 : 工具径補正C(M)または刃先R補正(L)の干渉チェックを行います。
LGC 磨耗(ウェア)のオフセット番号と形状(ジオメトリ)のオフセット番号が共通の
場合 (パラメータLGN=0)に、オフセット番号‘0’が指令されると
1 : 磨耗(ウェア)オフセットと形状(ジオメトリ)オフセットの両方がキャンセ
ルされます。
0 : 磨耗(ウェア)オフセットのみキャンセルされ、形状(ジオメトリ)オフセッ
トはキャンセルされません。
LGN 工具位置補正でTコードの下2桁または1桁のオフセット番号で
1 : 磨耗(ウェア)のオフセット番号を、 工具番号(Tコードの下4桁、3桁また
は2桁以上)で形状(ジオメトリ)のオフセット番号を指令します。
0 : 形状(ジオメトリ)のオフセット番号と磨耗(ウェア)のオフセット番号を指
令します。すなわち形状(ジオメトリ)オフセット番号と磨耗(ウェア)オフ
セット番号は共通です。
7-58
2.パラメータ一覧
LWT 工具位置補正の磨耗(ウェア)オフセットは
1 : ワーク座標系をシフトさせることにより補正します。
0 : 工具を移動させることにより補正します。
LGT 工具位置補正の形状(ジオメトリ)オフセットは
1 : 工具を移動させることにより補正します。
0 : ワーク座標系をシフトさせることにより補正します。
CNC 工具径補正(M)または刃先R補正(L)(G41, G42)の干渉チェックでプログラムさ
れた移動方向とオフセットされた移動方向が90°-270°異なる場合は
1 : アラームとしません。
0 : アラームとします。
CSU 工具径補正(M)または刃先R補正(L)(G41, G42)のスタートアップは
1 : タイプBです。
0 : タイプAです。
6002
7
6
5
4
3
2
1
0
TMB
(L)
OD2
OD1
OHS
(L)
OFE
ORC
(L)
T01
K40
TMB
1 : オフセット測定値直接入力 B機能が有効です。 (ツールセッタ)
0 : オフセット測定値直接入力 A機能が有効 (絶対)
OD2, OD1 : 工具補正データの個数を次のように指定します。
OD2
OD1
データ個数(L)
データ個数(M)
0
0
32
32
0
1
64
99
1
0
94
200
1
1
-
500
OHS オフセット量測定時に直接入力B機能を選択時 (TMB=1)高速スキップ信号を
1 : 使用しません。
0 : 使用します。
OFE 経路表示をする時の工具長オフセット量(M)または工具位置オフセット量(L)を
1 : 差し引いて経路を表示します。
0 : 含めて経路を表示します。
ORC 1 : 工具位置補正量を半径値で設定します。
0 : 공工具位置補正量を直径値で設定します。
TO1 円弧と円弧が連結するときに外的補正の場合、角度が1度以内の時に直線成分を
1 : 生成しません。
0 : 生成します。
K40 工具径補正キャンセルを円弧補間後に
1 : 指令してもアラーム121を発生しません。
0 : 指令しするとアラーム121を発生します。
7-59
第7章 パラメータ
6010
WEAR OFFSET LIMIT X
(L)
旋盤の工具補正でX軸の磨耗補正制限値を設定します。
設定値 : 0 ~ 99999999
0のときは制限がありません。
6011
WEAR OFFSET LIMIT Y
(L)
旋盤の工具補正でY軸の磨耗補正制限値を設定します。
設定値 : 0 ~ 99999999
0のときは制限がありません。
6012
WEAR OFFSET LIMIT Z
(L)
旋盤の工具補正でZ軸の磨耗補正制限値を設定します。
設定値 : 0 ~ 99999999
0のときは制限がありません。
6013
WEAR OFFSET LIMIT R
(L)
旋盤の工具補正でR軸の磨耗補正制限値を設定します。
設定値 : 0 ~ 99999999
0のときは制限がありません。
6017
TOUCH SENSOR +Z (ZP)
(L)
6015
TOUCH SENSOR +X (XP)
(L)
6016
TOUCH SENSOR -X (XM)
(L)
6018
TOUCH SENSOR -Z (ZM)
(L)
工具補正量直接入力B機能に関するパラメータです。 X軸-接触面までの距離(Xm)を
設定します。測定基準位置からセンサのそれぞれの接触面までの距離(符合付き)を設
定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
直径指定の軸については直径値で設定します。
設定値 : -99999999~99999999
6019
TOOL LENGTH BIAS
(M)
工具長補正量入力時にPLC I/Fを使用する場合に、工具の端と加工物平面の差(バイア
ス量)を設定します。
設定値 : -999999~999999 標準値 : 0
7-60
2.パラメータ一覧
6020
LASER ON INTERVAL
(LASER SCRIBER용)
未使用
6021
DRY RUN Z OFFSET
ドライラン時のZ軸オフセット機能のオフセット量。
メタリック入力
IS-A
0.01
設定単位
IS-B
0.001
IS-C
0.0001
단위
mm
設定値 : 0~999999
6100
(レーザ切断機用)
CLEARANCE 1
標準値 : 1000
6101
(レーザ切断機用)
CLEARANCE 2
標準値 : 2000
6102
(レーザ切断機用)
CLEARANCE 3
標準値 : 3000
トレース機能のノーマルクリアレンス1の値を設定します。
クリアレンス1・2・3の選択はPLC-NC信号で選択します。
設定値 : 0~32767 設定単位 : 0.001mm
6103
COMP. TIME 1
(レーザ切断機用)
6104
COMP. TIME 2
(レーザ切断機用)
衝突信号オン時のモータ制御補正時間を設定します。衝突時に設定された時間内に
モータがストップし、異常の場合モータが上昇しますクリアレンス1・2が選択され
ている時には補正時間1が有効でクリアレンス3が選択されている時には補正時間2
が有効です。
設定値 : 0~32767 設定単位 : msec
標準値 : 20
6105
(レーザ切断機用)
THRESHOLD
位置到達信号を出力すためのスレッシホールド値を設定します。
設定値 : 0~32767 単位 : 0.001mm 標準値 : 1000
7-61
第7章 パラメータ
6106
MEASURING RANGE
(レーザ切断機用)
センサ10V出力時のワークとノズル間の距離を設定します。
設定値 : 0~32767 単位 : 0.001mm 標準値 : 10000
6107
CLEARANCE OFFSET
(レーザ切断機用)
トレーシング機能基準電圧オフセット。
設定値 : -1000~1000 単位 : V
6108
NC INPUT VOLTAGE
(レーザ切断機用)
トレーシング機能NC入力電圧。
設定値 : 0~1000 単位 : 0.01V
6109
M/C OUTPUT VOLTAGE
(レーザ切断機用)
トレーシング機能プラズマ出力電圧。
設定値 : 0~1000 単位 : V
6110
(レーザ切断機用)
GAIN P
トレース機能動作時の比例ゲインを設定します。
設定値 : 0~32767 標準値 : 500
6111
(レーザ切断機用)
GAIN I
トレース機能動作時の積分ゲインを設定します。
設定値 : 0~32767 標準値 : 0
6112
(レーザ切断機用)
GAIN D
トレース機能動作時の微分ゲインを設定します。
設定値 : 0~32767 標準値 : 0
6113
INPOSITION WIDTH CUT
(レーザ切断機用)
エッジ自動加減速時のインポジションエラー値を設定します。
設定値 : 0~25000 単位 : 検出単位(PULSE)
6114
(AX)
TRACING ANALOG V OFFSET
各トレーシング軸アナログ入力電圧にオフセットを加えます。
設定値 : -4096 ~ 4096 (10V = 4096)
7-62
(レーザ切断機用)
2.パラメータ一覧
7
6115
TMD
6
5
4
3
(AX)
2
1
0
TMD
(C)
TRD
(C)
TRE
(C)
1 : トレーシング機能のモータの方向を反転します。
0 : トレーシング機能のモータの方向を反転しません。
TRD トレーシング機能のクリアレンス表示およびマクロ変数の指定(#5840)を
1 : 行います。
0 : 行いません。
TRE 1 : 該当軸のトレーシング機能 有効。
0 : 該当軸のトレーシング機能 無効。
1401 TRA=1の時、従来のトレーシング(Z軸のみ)が有効。第3軸をトレーシ
ング可能とする場合は、TRA=0 に設定します。
6116
(AX)
TRACING A/D INPUT NO
(レーザ切断機用)
トレーシング機能に使うアナログ入力のチャンネル番号を設定します。
各軸のパラメータの設定範囲 : 0~127
0の場合はトレーシング機能は無効です。
RAD1の1チャンネルを第2軸に使用する場合に第2軸に1を設定します。
アナログ入力は2つを使用する場合n、mチャンネルを使用する場合は nx10+m の値を
設定します。
6117
(AX)
(レーザ切断機用)
TRACING GAIN
各軸ごとのトレーシング機能の比例ゲインを設定します。
設定範囲 : 0~32767
6118
(レーザ切断機用)
TRACING ANGLE
ベベリングトレーシング機能での動作角度を設定します。
設定範囲 : 1~10
6119
TRACING THINNESS
ベベリングトレーシング機能での材料の厚さを設定します。
設定範囲 : 1~10
7-63
(レーザ切断機用)
第7章 パラメータ
6120
(レーザ切断機用)
CORNER ANGLE
C軸工具方向制御機能においてコーナアングル値を設定します。
C軸移動量がこの設定値を越えると工具アップ(M50)/ダウン(M51) が出力されます。
設定範囲 : 0~127 設定単位: 1deg
6121
(レーザ切断機用))
ADVANCE
C軸工具方向制御機能において工具幅補正量を設定します。
設定範囲: 0~32767 設定単位 : 0.01mm
6122
(レーザ切断機用)
OVERCUT
C軸工具方向制御機能においてオーバーカット量を設定します。
設定範囲: 0~32767 設定単位 : 0.01mm
6123
CORNER ADVANCE
(レーザ切断機用)
C軸工具方向制御機能においてコーナアドバンス量を設定します。コーナで工具がアッ
プ/ダウンする場合の工具幅補正量を設定します。
設定範囲: 0~32767 設定単位 : 0.01mm
6124
CORNER OVERCUT
(レーザ切断機用)
C軸工具方向制御機能においてコーナオーバカット量を設定します。コーナで工具が
アップ/ダウンする場合のオーバカット量を設定します。
設定範囲: 0~32767 設定単位 : 0.01mm
6125
(布地截断機用)
MAX DISTANCE
截断機C軸方向制御機能において連続截断する最大距離を
設定範囲: 0~32767 設定単位 : 0.01mm
6126
M17 LARGE ADVANCE
(布地截断機用)
截断機C軸方向制御機能においてM17ラージアドバンス時のアドバンス量を設定しま
す。
設定範囲: 0~32767 設定単位 : 0.01mm
7-64
2.パラメータ一覧
6127
bit7 1
0
JSC 1
0
MCL 1
0
SC2,SC1
7
6
bit7
JSC
4
3
2
1
0
MCL
(C)
SC1
(C)
SC0
(C)
SXY
(C)
: X-Y平面方向制御のG02方向を反対にします。
: X-Y平面方向制御のG02方向を反対にしません。
: 診断画面に同期制御診断5項目のデータを表示します。
: 診断画面に同期制御診断5項目のデータを表示しません。
: M14, M15 工具アップ/ダウン Mコード出力を無効にします。
: M14, M15 工具アップ/ダウン Mコード出力を有効にします。
方向制御C軸を指定。
SC1(B2)
0
0
1
1
SXY
5
SC0(B1)
0
1
0
1
指定回転軸
第2軸
第1回転軸
第2回転軸
第3回転軸
1: X,Y軸をパラメータ1032の値と円弧平面によって指定します。
最小単位はNCで設定したとおりにします。(使用する軸の最小単位は同じで
ないといけません。)
0: X,Y軸を第1軸、第2軸にし、最小単位を 0.001mmに固定します。
6128
TRACING POSITION STEP
(C)
トレーシング機能でトレーシング位置のステップ数を設定します。
設定値 : 1~16 標準値 : 16
6129
(AX)
TRACING GAIN M
(C)
各軸ごとのトレーシング機能の-方向の比例ゲインを設定します。
設定値 = 0 のときは パラメータ6117番で+、-方向を適用します。
設定値 : 0~32767
6130
M02 REPEAT VALUE
(C)
M2コードによる反復回数値を設定します。
設定値 : 0~99
6131
KERF VALUE
(C)
ガス切断機の加工設定切断幅を設定します。 ( 仕様B )
設定値 : 0~100000 単位 : 0.001mm
6132
GAS CUTTING FEED
ガス切断機の加工設定切断速度を設定します。 (仕様B)
設定値 : 0~32767 単位 : mm/min
7-65
(C)
第7章 パラメータ
6133
FEED DOWN LEVEL (FEED)
(C)
ガス切断機の削り速度が落ちてきたという信号を出力する制限速度を設定します。
(仕様B)
設定値 : 0~25000 単位 : mm/min
6134
FEED DOWN LEVEL (1/100%)
(C)
ガス切断機の削り速度が落ちてきたという信号を出力する制限速度を設定します。
パラメータ6133番値が0で6134番に値が設定されている時、設定されたフィードの
%を比較してフィードダウン信号[F153.6]をオンします。
設定値 : 0~10000 単位 : 1/100%
6135
SAWING FEED
(C)
布団刺繍機 田島プログラム変換時の加工速度。
設定値 : 100~5000 単位 : MM/MIN
6136
SAWING SPINLDE SPEED
(C)
布団刺繍機 田島プログラム変換時のスピンドル速度。
設定値 : 0~10000 単位 : REV/MIN
6137
CUT PRE OUT M CODE NO.
(C)
ブロック終了前のPLC信号出力指定Mコード番号。
設定値 : 0~1000
6138
CUT PRE DISTANCE
(C)
ブロック終了前のPLC信号出力距離。
設定値 : 0~500000 単位 : MM
6139
SIGNAL OUT FEED (F152.7)
(C)
F152.7をONする実行Fコード値
設定値 : 0 ~ 500000 単位 : MM
6140
G02/G03 PLC OUTPUT LIMIT R
(C)
ここで設定された値より小さいR値でG02/G03の指令時F158.0をオンし
指令が終わるとオフにします。
値が0の時は無効。
単位 : MM
7-66
2.パラメータ一覧
6141
ROTARY SWITCH ADDRESS X*.*
(布団刺繍機)
Xアドレスを設定します。
設定値 : 00 ~ 37
10の桁は Xチャンネル / 1の桁 Bit番号(8,9は 7と見なします)
例) X0.6 のとき 06
6142
ROTARY SWITCH RANGE MIN
(布団刺繍機)
上昇スイッチを利用したCycle Counter Inposition Min Dataを設定します。
設定値 : 0~5000
6143
ROTARY SWITCH RANGE MAX
(布団刺繍機)
上昇スイッチを利用したCycle Counter Inposition Max Dataを設定します。
設定値 : 0~5000
6145
CONER DISCOUNT ELM LENGTH
(C)
工具径補正による経路変化で円弧と直線間に短い直線部分が生じることがあります。
加工のとき無視するその短い直線部分の長さを指定します。
設定値 : 0~5000
6154
SPINDLE D/A ZERO OFFSET
設定値 : 0~5000
6154
SPINDLE D/A ZERO OFFSET
スピンドル用D/A コンバータのゼロオフセットを設定します。
設定値 : -32767~32767
6160
AUTO SCR COUNTER DISP NO
(C)
自動運転中画面にカウンタの値を表示。
値が0の時は無効。
設定値 : 0~20
6170
ROUGH GRIND CUT FORCE
荒研削時の目標研削力を設定します。
主軸の最大研削力を100%として設定します。
設定値 : -127~127
単位 : 1 %
7-67
(G)
第7章 パラメータ
6171
FINISH GRIND CUT FORCE
(G)
仕上げ研削時の目標研削力を設定します。
主軸の最大研削力を100%として設定します。
設定値 : -127~127
単位 : 1 %
6172
KC GAIN CONSTANT
(G)
定研削力制御のゲインを設定します。
設定値 : 0~65534
6173
COMPENSATION TYPE
(G)
砥石径補償タイプを設定します。 軸の最大研削力を100%として設定します。
目標研削力
0
研削力目標値
1
2
現在 初期
設定値 : -127~127
6174
GRIND CUT M CODE
(G)
定研削力制御機能で使用するMコード4個中最初の番号を設定します。
この番号の + オフセットが各制御機能のMコードになります。
定研削制御機能で使用される M コードはMフラグが立ちません。
設定値 : -127~127
6175
GRIND POWER DI
(G)
定研削力制御機能で使用する研削力を入力するディジタル入力のアドレスを設定しま
す。
0の場合は従来の仕様の研削力入力が有効になります。
9010<ES4> = 1の場合はEPS4のアナログ入力を使用します。
9010<ES4> = 0, 9013<AD1> = 1の場合はRAD1のCH1のアナログ入力を使用します。
設定値 : 0~499
6176
FULL POWER VOLTAGE
研削力(主軸負荷)100%に対する電圧パラメータ。
設定値 : 0~127 単位:%
7-68
(G)
2.パラメータ一覧
6177
POWER FILTER CONSTANT
(G)
定研削力用ローパスフィルタ。
設定値 : 0~127 単位:ms
7
6200
V40
SRP
FCU
SIJ
DWL
FXY
6
V40
(M)
5
4
SRP
3
2
1
0
FCU
SIJ
DWL
FXY
1 : TNV40でTコード単独で工具交換が可能です。
0 : TNV40でTコード単独で工具交換が不可能です。
1 : 穴あけ加工固定サイクルG76,G87のシフト処理を早送りで処理します。
0 : 穴あけ加工固定サイクルG76,G87のシフト処理を早送りで処理しません。
固定サイクルの穴あけ点への移動は
1 : 位置決めモード(G00)の場合は早送りで、位置決めモード以外(G01、
G02、G03)の場合は直線補間なります。
0 : 常に早送りです。
固定サイクルのファインボーリング、バックボーリングでスピンドルオリエン
テーション後
1 : 工具を逃がす方向と移動量はプログラム(I,J,K)で指令します。
0 : 工具を逃がす方向はパラメータ6240で設定し、移動量はプログラム(Q)で
指令します。
1 : 固定サイクルのタッピングサイクルでPによるドウェル指令は有効です。
0 : 固定サイクルのタッピングサイクルでPによるドウェル指令は無効です。
1 : 固定サイクルの穴あけ軸はプログラムで選択された軸です。
0 : 固定サイクルの穴あけ軸は常にZ軸です。
7
6
5
4
3
6201
GC2
1 : オーバライド最大値100%
0 : オーバライド最大値200%
MN5 穴あけ加工固定サイクル中M19,M03,M04を出力する前に
1 : M05を出力しません。
0 : 出力します
適用G コード G74,G76,G84,G87
7-69
2
1
GC2
(G)
MN5
0
第7章 パラメータ
7
6202
TPK
6
ABS
5
FCK
4
WCR
3
2
1
0
OAC
TPR
(M)
NRC
(L)
MOR
(L)
TPK 自動運転モードでグラフィック画面を
1 : 維持しながら手動運転、ハンドル運転になります。
0 : 維持せず手動運転、ハンドル運転になります。
ABS 1 : 工具経路をグラフィク表示する時、絶対座標を基準にします。
0 : 工具経路をグラフィク表示する時、機械座標を基準にします。
FCK 1 : グラフィクフィードチェックを有効にします。
(注意) 送り確認実行後は原点復帰を行う必要があります。
0 : グラフィクフィードチェックを無効にします。
WCR 1 : グラフィク表示でワーク座標系が変わると描画画面をクリアします。
0 : グラフィク表示でワーク座標系が変わっても描画画面をクリアしません。
OAC G28,G30実行時に工具長補正(旋盤:工具位置補正)の場合
1 : 自動的にキャンセルします。
0 : "109 RPR IN TOOL OFFSET" のアラームを表示します。
TPR パラメータ番号1032でX、Y、Z基準軸になっている軸をグラフィック表示で
第1,第2,第3軸として
1 : 描きます。
0 : 描きません。
NRC 1 : 荒削りサイクル(G71, G72)の最後で荒削りの仕上げ加工を行ないません。
0 : 荒削りサイクル(G71, G72)の最後で荒削りの仕上げ加工を行ないます。
MOR 単一形旋削サイクルモード中、移動指令がないブロックで
1 : 旋削サイクルを行います。
0 : 旋削サイクルを行いません。
7
6203
6
5
CDI
(SPIN)
4
3
2
1
0
TP3
BBA
A26
TP2
CDI GEOHWA社のスピニングマシンで
1 : カーリングダイ 前進・後進機能を使用します。
0 : カーリングダイ 前進・後進機能を使用しません。
TP3 タッチパネルの通信プロトコルタイプを設定します。
1 : boscotec社のタッチパネルを使用します。
0 : boscotec社のタッチパネルを使用しません。
BBA ガス切断機のBeveling機能で円弧補間時、B軸またはA軸の角度補正機能を使
用するときに(パラメータ6203 B1 <A26>=1 の時)
1 : B軸が移動時にA軸を補正します。
0 : A軸が移動時にB軸を補正します。
A26 ガス切断機のBeveling機能で円弧補間時、B軸またはA軸の角度補正機能を
1 : 使用します。
0 : 使用しません。
7-70
2.パラメータ一覧
TP2 タッチパネルの通信プロトコルタイプを設定します。
1 : 新しいタイプ(2010年10月以降出荷分)
0 : 従来のタイプ
6205
SPEED COLORING MAXIMUM
6206
SPEED COLORING LEVEL
未使用
6210
RETURN AMOUNT G73
固定サイクルG73のもどり量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~99999999
(X, Y)
初期点
R点
Q
Q
d
d
Z点
d : 後退量
7-71
第7章 パラメータ
6211
CLEARANCE AMOUNT G83
固定サイクルG83のクリアランス量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~99999999
(X, Y)
初期点
R点
Q
Q
d
d
Z点
d : クリアランス量
6212
CHAMFERING AMOUNT
(L)
ねじ切りサイクル(G76, G92)のチャンファリング量を設定します。
設定値 : 0~127 単位 : 0.1 pitch
6213
CHAMFERING ANGLE
(L)
ねじ切りサイクル(G76, G92)のチャンファリング角度を設定します。
設定値 : 0~60 単位 : 1 deg
6215
RETRACT AMOUNT G71 G72
(L)
荒削りサイクル(G71, G72)の逃げ量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~32767
7-72
2.パラメータ一覧
6216
CLEARANCE AMOUNT G71 G72
(L)
荒削りサイクル(G71, G72)のクリアランス量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~32767
6217
RETURN AMOUNT G74 G75
(L)
突切りサイクル(G74,G75)の戻り量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~32767
6218
MINMUM INFEED G76
(L)
ねじ切りサイクル(G76)の最小切り込み量のを設定します。ねじ切りサイクル(G76)の
1回切り込み量がパラメータ設定された最小切り込み量よりも小さくなると、最小切り
込み量でクランプされます。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~32767
6219
FINISH ALLOWANCE G76
(L)
ねじ切りサイクル(G76)の仕上げしろ量を設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
0.01
0.001
0.0001
mm
インチ入力
0.001
0.0001
0.00001
inch
設定値 : 0~32767
6220
SPARK OUT G76
(L)
ねじ切りサイクル(G76)の最後の仕上げサイクルの繰り返し回数を設定します。
設定値 : 0~255
6221
DEPTH OF CUT G71 G72
固定サイクルG71, G72の1回転当りの削り量を設定します
設定値 : 1~99999999 (単位はパラメータ6219の単位表を参照)
7-73
(L)
第7章 パラメータ
6222
RELIEF AMOUNT I G73
(L)
固定サイクルG73の X軸方向の荒削り量を設定します。
設定値 : 1~99999999 (単位はパラメータ6219の単位表を参照)
6223
RELIEF AMOUNT K G73
(L)
固定サイクルG73の Z軸方向の荒削り量を設定します。
設定値 : 1~99999999 (単位はパラメータ6219の単位表を参照)
6224
NUMBER OF DIVISIONS G73
(L)
固定サイクルG73の分割回数を設定します。
設定値 : 1~99999999
6225
TOOL NOSE ANGLE G76
(L)
固定サイクルG76のねじ山の角度を設定します。
設定値 : 0~120 単位 : deg
6226
INPOSITION WIDTH Z AXIS
(L)
穴あけ固定サイクルの1サイクル完了後、次のXY平面位置決め開始条件であるZ軸イン
ポジション量を設定します。
設定値 : 0~25000 標準値 : 1000
6240
(AX)
TOOL RETRACT DIRECTION
(L)
固定サイクルG76(旋盤系ではG86.1)とG87のスピンドルオリエンテーション後の工具
を逃がす軸と方向を設定します。各穴あけ軸に対応して、オリエンテーション後の工
具を逃がす軸と方向を設定することができます。設定された数値で軸番号を±の符合
で方向を指定します。
設定値 : -8 ~ +8
例) 穴あけ加工軸がX軸の場合オリエンテーション後工具が逃避する方向は –Y
穴あけ加工軸がY 軸の場合オリエンテーション後工具が逃避する方向は +Z
穴あけ加工軸がZ 軸の場合オリエンテーション後工具が逃避する方向は –X
の場合次のように設定します。(ただし第1・ 第 2・ 第3軸が X・Y・Z軸の場合)
第1軸のパラメータには –2 (工具が逃避する方向は –Y)
第2軸のパラメータには 3 (工具が逃避する方向は +Z)
第3軸のパラメータには –1 (工具が逃避する方向は –X)
それ以外の軸には0を設定します。
7-74
2.パラメータ一覧
6400
7
6
5
4
3
2
1
0
PDM
PBM
GLS
AB2
FD2
FDS
SCR
(M)
RIN
(M)
PDM リファレンス点復帰,MDI,ハンドル運転モード選択時パターン入力を
1 : 表示します。
0 : 表示しません。
PBM 1 : ポイントボーリング専用画面を使用します。(O6000番台)
0 : ポイントボーリング専用画面を使用しません。
GLS 1 : グラススクライブ専用画面を使用します。(O5000 番台)
0 : グラススクライブ専用画面を使用しません。
AB2 アブソリュートエンコーダのCOMポートを設定します。パラメータ6452番の
<AB3>との込み合わせで決定されます。
COM1
COM2
COM3
COM4
P6452 <AB3>
0
0
1
1
P6400 <AB2>
0
1
0
1
FD2
1 : 外付け記憶装置(FDUまたはUSU)との通信をCOM2でします。
0 : 外付け記憶装置(FDUまたはUSU)との通信をCOM1でします。
FDS ユーザーのフロッピディスクドライブのファイル拡張子を
1 : 無しにします。(O1234)
0 : .NCにします。(O1234.NC)
SCR 1 : スケーリング(G51)の倍率の単位は0.001 倍単位です。
0 : スケーリング(G51)の倍率の単位は0.00001 倍単位です。
RIN 座標回転(G68)の回転角度の指定(R)は
1 : アブソリュート(G90)/インクリメンタル(G91)モードによります。
0 : 常にアブソリュート値です。
6401
ALY
CPN
ALF
PDS
SAW
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
7
6
5
ALY
(C)
CPN
(C)
ALF
(C)
4
PDS
3
SAW
2
FDD
1
0
ASN
XSC
(M)
アライメント機能第1・第2点をY軸上の点として設定します。
アライメント機能第1・第2点を X軸上の点として設定します。
ガスカット用パターンデータ入力を使用します。
ガスカット用パターンデータ入力を使用しません。
ガスカット用アライメント機能を使用します。
ガスカット用アライメント機能を使用しません。
自動運転選択時にパターン入力画面を表示します。
自動運転選択時にパターン入力画面を表示しません。
1軸ランニングソー専用画面を使用します。
1軸ランニングソー専用画面を使用しません。
7-75
第7章 パラメータ
FDD
1 : 外付けフロッピディスクドライブユニットを使用します。
0 : 外付けフロッピディスクドライブユニットを使用しません。
ASN
1 : シーケンス番号自動挿入機を有効にします。
0 : シーケンス番号自動挿入機を無効にします。
XSC
1 : スケーリング倍率を I J Kで指令します。
(各軸スケーリング、ミラーイメージが有効になります。)
0 : スケーリング倍率をPで指令します。
6402
RSD
TRC
TR2
EX9
EX8
ALC
NSR
PPR
6403
7
6
5
RSD
(C)
TRC
(C)
TR2
(C)
4
EX9
3
2
EX8
ALC
(C)
1
0
NSR
PPR
(C)
1 : 自動運転プログラム画面でガス切断データを右側に表示します。
2202 HCH=1, 6401 CPN=0にすれば使用可能です。
0 : 自動運転プログラム画面でガス切断データを右側に表示しません。
1 : グラフィック画面プレビュー機能を有効にします。
0 : グラフィック画面プレビュー機能を無効にします。
1 : グラフィック画面プレビュー機能で工具補正値を無効にします。
0 : グラフィック画面プレビュー機能で工具補正値を有効にします。
1 : 一覧表に編集・表示禁止されたO9000 - O9999を表示しません。
0 : 一覧表に編集・表示禁止されたO9000 - O9999を表示します。
1 : 一覧表に編集・表示禁止されたO8000 - O9999を表示しません。
0 : 一覧表に編集・表示禁止されたO8000 - O9999を表示します。
1 : 整列機能を無効にします。
0 : 整列機能を有効にします。
マクロ変数#698のプログラムをシーケンス番号#699からリスタートする機能
を
1: 有効にします。
0: 無効にします。
1: 位置復帰機能を有効にします。
0: 位置復帰機能を無効にします。
7
6
5
4
3
2
1
0
DDM
CSC
CRC
(C)
BM4
PAC
SJ2
SJ1
J0S
DDM ディスクからNCプログラム入力時に表示できないコードを
1 : 削除します。
0 : 削除しません
CSC 1 : チェックサム機能を有効にします。
0 : チェックサム機能を無効にします。
CRC 1 : 円弧進入時に工具径補正を適用します。
0 : 円弧進入時に工具径補正を適用しません。
7-76
2.パラメータ一覧
BM4
PAC
SP2
1
0
1
0
1
:
:
:
:
:
加工設定グラフィック式一覧表で1画面に4個の図を表示します。
加工設定グラフィック式一覧表で1画面に16個の図を表示します。
PLC軸設定でPLCアドレスをパラメータよりも優先します。
PLC軸設定でパラメータをPLCアドレスよりも優先します。
特殊診断でインターラプト診断を行います。
0 : 特殊診断でリファレンス点復帰診断を行います。
SP1 特殊診断用
J0S MDIモードの位置画面で
1 : ポジションセットメニューを表示して相対 0 SETを無効にします。
0 : 相対 0 SETを無効にします。
7
PI0
(PNC)
6404
6
SWD
5
4
3
2
1
0
RTT
GCP
(C)
TPA
AM3
AM2
AM1
PIO 予約
SWD 1 : ランニングソー用特殊オプション有効。
0 : ランニングソー用特殊オプション無効。
RTT 1 : リターン機能の移動を1直線で 行います。
0 : リターン機能の移動を1軸ずつ行います。
GCP 1 : ガス切断機パターンAタイプでPLCタイマを使用します。
0 : ガス切断機パターン Aタイプでマクロを 使用します。
TPA 予約
AM3/AM2/AM1 (6409 B7 <AT2> = 0 の時)
アブソリュートエンコーダのメーカを指定します
AM3
0
0
0
6405
EFN
PTC
SWR
VAR
MSG
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
AM2
0
0
1
AM1
0
1
0
メーカ
PANASONIC
YASKAWA
MITSUBISHI
7
6
5
4
3
2
1
0
EFN
PTC
SWR
VAR
MSG
MNG
PAD
TPN
プログラム編集画面でファイル操作機能を使用します。
プログラム編集画面でファイル操作機能を使用しません。
プログラム編集画面で部分複写機能を使用します。
プログラム編集画面で部分複写機能を使用しません。
サーボ波形でアナログ入力電圧を使用します。
サーボ波形でアナログ入力電圧を使用しません。
サーボ波形でアナログ入力電圧を自動拡大表示します。
サーボ波形でアナログ入力電圧を自動拡大表示しません。
機械状態表示機能を有効にします。 (ランニングソー)
機械状態表示機能を無効にします。 (ランニングソー)
7-77
第7章 パラメータ
MNG
PAD
TPN
1
0
1
0
1
:
:
:
:
:
管理者用で起動します。 (ランニングソー)
作業者用で起動します。 (ランニングソー)
キーパッドを表示します。 (タッチパネル)
キーパッドを表示しません。 (タッチパネル)
タッチパネルを使用します。
0 : タッチパネルを使用しません。
6406
7
6
5
4
3
2
1
0
USB
CPS
PNO
CRM
TB2
(C)
SWE
ADM
SPN
USB USBメモリファイル制御プログラムの制御メニューを
1 : 表示します。
0 : 表示しません。
CPS 加工条件設定画面Gコード生成機能を
1 : 使用します。
0 : 使用しません。
PNO 加工条件設定画面機能で#500に現在選択されているプログラム番号を
1 : 入力します。
0 : 入力しません。
CRM 真円図測定機能の第2バージョンを
1 : 有効にします。
0 : 無効にします。
TB2 TTarboTec社のGコードをSENTROL2のGコードに
1 : 変換します。(布団刺縫い機用)
0 : 変換しません。
SWE ランニングソー専用画面での自動運転時の表示は
1 : パネル表示です。
0 : 機械表示です。
ADM 1 : ファイル“DmyInput.txt”の内容どおりにデモ動作をします。
0 : デモ動作をしません。
SPN 1 : タッチパネル用特殊画面を使用します。
0 : タッチパネル用特殊画面を使用しません
7
FVS
(C)
6407
FVS
WCC
DR2
1:
0:
1:
0:
1:
0:
6
WCC
5
4
3
2
1
0
DR2
MAL
(C)
TJ2
PLR
FNC
PL0
X,Y方向別速度指定機能を有効にします。
X,Y方向別速度指定機能を無効にします。
自動運転起動時ワーク補正 COMMON値を0にします。
自動運転起動時ワーク補正 COMMON値を0にしません。
スケジュール機能油圧サーボドリリング仕様選択。
油圧サーボドリリング仕様選択。
7-78
2.パラメータ一覧
MAL
1: 整列画面で位置復帰機能可能。
0: 整列画面で位置復帰機能不可能。
TJ2 Tajima社のGコードをSENTROL2のGコードに
1: 変換します。(布団刺縫い機用)
0: 変換しません。
PLR
1: PLC絶対座標0設定機能で、相対座標も0にします。
0: PLC絶対座標0設定機能で、相対座標は0にします。
FNC (予約)
PL0 1: PLC信号で絶対座標設定機能を有効にします。
0: PLC信号で絶対座標設定機能を無効にします。
6408
CFD
UUS
CPO
C12
NSS
NSD
DRG
G10
6409
7
6
5
4
3
2
1
0
CFD
UUS
CPO
C12
NSS
NSD
DRG
G10
1 : CFメモリ装置(Dドライブ)を使用します。
0 : CFメモリ装置(Dドライブ)を使用しません。
1 : 外付けUSB装置(USU)を使用します。
0 : 外付けUSB装置(USU)を使用しません。
スケジュール機能マクロを登録する時に同じ名前のマクロファイルがある時
1 : 上書きします。
0 : 上書きしません。
GEOHWA社のスピニングマシンのGURING-1 仕様は
1 : GURING-1 Z軸も使用。
0 : GURING-1 X軸だけ使用。
1 : オートスタート時D32の工具径補正を取り消します。
0 : オートスタート時D32の工具径補正を取り消しません。
1 : オートスタート時 G51の設定を取り消します。
0 : オートスタート時 G51の設定を取り消しません。
1 : ドリル加工用グラフィック平面選択(X-Y平面固定)。
0 : グラフィック平面の固定をしません。
1 : リバース、リトレース機能実行時にG10を実行します。
0 : リバース、リトレース機能実行時にG10を実行しません。
7
6
5
4
3
2
1
0
AT2
TSC
PSS
XAR
CRS
ANS
C10
FSC
AT2
1 : 複数メーカのアブソリュートエンコーダを使用。
パラメータ1818번 B7,B6,B5でメーカを指定します。
0 : 1つのメーカのアブソリュートエンコーダを使用。
パラメータ6404번 B2,B1,B0でメーカを指定します。
TSC GEOHWA社SPINNING MACHINEのTM09/TM18は
1 : FRONT DELAY
0 : END DELAY
7-79
第7章 パラメータ
PSS
CRS
1
0
1
0
1
ANS
0 : RIO基板ショートチェック時アラーム表示をします。
1 : NC起動時にアブソリュート座標値を0にします。
XAR
C10
FSC
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
6410
座標値設定特殊機能有効。
座標値設定特殊機能無効。
グラフィック画面でX軸を回転表示します。
グラフィック画面でX軸を回転表示しません。
RIO基板ショートチェック時アラーム表示をしません。
NC起動時にアブソリュート座標値を0にしません。
自動運転開始時にG10の設定を取り消します。
自動運転開始時にG10の設定を取り消しません。
自動運転開始時にFEED自動初期設定をしません。
自動運転開始時にFEED自動初期設定をします。
MAGNIFICATIONS P G51
(M)
スケーリング(G51)の倍率を指定します。
設定値 : 1~99999999
単位 : 0.001または0.00001 (PARA. “SCR” NO.6400によります。)
6411
ROTATION ANGLE R G68
(M)
座標回転(G68)の回転角度を指定します。
設定値 : -360000~360000 単位 : 0.001 deg
6421
MAGNIFICATIONS G51
(AX)
(M)
各軸毎のスケーリング(G51)の倍率を指定します。
設定値 : -999999~999999
単位 : 0.001または0.00001 (パラメータ6400番<SCR>によります。)
6450
HA2
HA3
KC3
KC2
KC1
POM
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
7
6
HA2
HA3
5
4
3
2
1
0
KC3
KC2
KC1
POM
DDR
2軸ヘリカル補間を指令します。
2軸ヘリカル補間を指令しません。
3軸ヘリカル補間を指令します。(HA2も1にします。)
3軸ヘリカル補間を指令しません。
設定入力キーの記憶機能を使用しません。
設定入力キーの記憶機能を使用します。
補正入力キーの記憶機能を使用しません。
補正入力キーの記憶機能を使用します。
プログラム入力キーの記憶機能を使用しません。
プログラム入力キーの記憶機能を使用します。
Power ONの後、自動的にモニタ機能のサンプリングを始めます。
Power ONの後、自動的にモニタ機能のサンプリングを始めません。
7-80
2.パラメータ一覧
DDR
予約
7
6
5
4
6451
3
2
1
0
TB1
TB0
OTC
PT2
TBO – TB1 : シリアル通信制御機能を使うときのボーレートを指定します。
ボーレート
9600
19200
38400
9600
OTC
PT2
TB1
0
0
1
1
TB0
0
1
0
1
シリアル通信制御機能で使用するCOMポートを指定します。
1 : COM2 ポートを指定します。
0 : COM1 ポートを指定します。
1 : シリアル通信制御機能を使用します。
0 : シリアル通信制御機能を使用しません。
7
6
5
6452
4
3
HCM
HCM
A3P
AB3
1
0
A3P
AB3
DDP
半自動(MDI)モードで運転状態が解除状態に変るとき
1 : ハンドルインタラプト量をクリアする。
0 : ハンドルインタラプト量をクリアしない。
NCの起動時アブソリュ─トエンコーダ接続エラーが発生するとき
1 : エラーが3回になるまで自動的に接続を試みます。
0 : すぐにエラー処理。
アブソリュートエンコーダのCOMポートを設定します。パラメータ6400番の
<AB2>との込み合わせで決定されます。
COM1
COM2
COM3
COM4
DDP
2
P6452 <AB3>
0
0
1
1
P6400 <AB2>
0
1
0
1
PCNCの一般診断画面にDual Positionの診断データを
1 : 表示するようにします。
0 : 表示しません。
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
6453
未使用
6454
未使用
7-81
第7章 パラメータ
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
6455
未使用
6456
未使用
6490
PLC 0SET WORK OFFSET NO
0の時は現在設定されているワーク座標系の絶対座標を0に設定します。
1~6の時は指定されたワーク座標系の絶対座標を0に設定します。
設定値 : 0~6
6500
TYPE OF SAVE DATA
SENTROL2でアドレスG257.0がオンになった時に内部データ(マクロ、データテーブ
ル、リレー、カウンタ)をファイルにセーブする機能で、セーブするデータを設定しま
す
0 : セーブするデータ無し
1 : マクロデータをセーブ
2 : データテーブルをセーブ
3 : リレーをセーブ
4 : カウンタをセーブ
6501
NUMBER OF SAVE DATA
パラメータ6500でセーブしたデータの番号およびバイト数(PLCデータの場合)を設定
します。
マクロデータ : マクロ番号
データテーブル、リレー、カウンタ : バイト数×1000+データ番号
6610
CORNER OVERRIDE MIN
(M)
自動コーナオーバライドの内側円弧切削速度の最小減速比設定
内側円弧切削速度の変更に対する最小減速比(MDR)を設定します。
設定値 : 1~100 単位 : % 標準設定値 : 1
6611
CORNER OVERRIDE ANGLE
内側コーナ部自動オーバライドの内側判定角度(2~178deg)を設定します。
設定値 : 1~89 単位 : 2 deg 標準設定値 : 46
7-82
(M)
2.パラメータ一覧
6612
CORNER OVERRIDE VALUE
(M)
内側コーナ部自動オーバライドの減速比設定
内側コーナのオーバライド量を設定します。
設定値 : 1~100 単位 : % 標準設定値 : 50
6613
CORNER OVERRIDE LE
(M)
内側コーナ部自動オーバライドの終点減速距離. 動作領域LEを設定します。
設定単位
IS-A
IS-B
IS-C
単位
メタリック入力
1
0.1
0.01
mm
インチ入力
0.1
0.01
0.001
inch
設定値 : 1~4000
6614
単位 : 下の設定単位表を参照
CORNER OVERRIDE LS
(M)
内側コーナ部自動オーバライドの始点減速距離. 動作領域LSを設定します。
設定値 : 1~4000
6616
単位 : パラメータ6613の設定単位表を参照
CIRCLE ERROR LIMIT
(M)
円弧半径による送り速度クランプ処理に使用する許容誤差量を設定します。
設定値が0の場合円弧半径による送り速度クランプ機能は無効になります。
単位系
設定単位
IS-A
0.01
IS-B
0.001
IS-C
0.0001
単位
mm
設定値 : 0~4000
6617
CIRCLE ERROR LIMIT M
(C)
マーキング時、円弧半径による送り速度クランプ処理に使用する許容誤差量を設定し
ます。
設定値が0の場合円弧半径による送り速度クランプ機能は無効になります。
設定値 : 0~4000
単位系
設定単位
6620
IS-A
0.01
IS-B
0.001
IS-C
0.0001
単位
mm
NO CUTTING FEED OVERRIDE
円弧部分の速度にオーバライドを適用します。0でなければその値がオーバライドとし
て適用されます。
7-83
第7章 パラメータ
6820
AMOUNT / DIRECTION (G60)
(AX)
一方向位置決め(G60)の方向とアプローチ量を設定します。 方向は設定データの符合
で指定をしてアプローチ量を値で指定します。
IS-A
0.01
0.01
直線軸
回転軸
設定単位
IS-B
0.001
0.001
IS-C
0.0001
0.0001
単位
mm
deg
設定値 : -32767~32767
6901
7
6
5
4
MA4
MA3
MA2
MA1
MA4 〜 MA1
3
2
PCM
1
0
IGP
ポジションスイッチ機能の比較座標系を機械座標/絶対座標に変更で
きるようにします。
MA1 : ポジションスイッチ1-4
0 : 機械座標 1 : 絶対座標
MA2 : ポジションスイッチ5-8
0 : 機械座標 1 : 絶対座標
MA3 : ポジションスイッチ9-12 0 : 機械座標 1 : 絶対座標
MA4 : ポジションスイッチ13-16 0 : 機械座標 1 : 絶対座標
PCM
IGP
1
0
1
0
:
:
:
:
加減速とサーボの遅延を計算せずに信号を出力します。
加減速とサーボの遅延を計算して信号を出力します。
ポジションスイッチ機能を有効にします。
ポジションスイッチ機能を無効にします。
7-84
2.パラメータ一覧
6910
AXIS NUMBER OF POS SWITCH 1
6911
AXIS NUMBER OF POS SWITCH 2
6912
AXIS NUMBER OF POS SWITCH 3
6913
AXIS NUMBER OF POS SWITCH 4
6914
AXIS NUMBER OF POS SWITCH 5
6915
AXIS NUMBER OF POS SWITCH 6
6916
AXIS NUMBER OF POS SWITCH 7
6917
AXIS NUMBER OF POS SWITCH 8
6918
AXIS NUMBER OF POS SWITCH 9
6919
AXIS NUMBER OF POS SWITCH A
6920
AXIS NUMBER OF POS SWITCH B
6921
AXIS NUMBER OF POS SWITCH C
6922
AXIS NUMBER OF POS SWITCH D
6923
AXIS NUMBER OF POS SWITCH E
6924
AXIS NUMBER OF POS SWITCH F
6925
AXIS NUMBER OF POS SWITCH G
ポジションスイッチ1に対応する制御軸の番号を設定します。
ションスイッチ1を無効にします。
設定値 : 0~8,16 ( 最大制御軸数 )
7-85
設定値が0の場合ポジ
第7章 パラメータ
6930
MAXIMUM OF POS SWITCH 1
6931
MAXIMUM OF POS SWITCH 2
6932
MAXIMUM OF POS SWITCH 3
6933
MAXIMUM OF POS SWITCH 4
6934
MAXIMUM OF POS SWITCH 5
6935
MAXIMUM OF POS SWITCH 6
6936
MAXIMUM OF POS SWITCH 7
6937
MAXIMUM OF POS SWITCH 8
6938
MAXIMUM OF POS SWITCH 9
6939
MAXIMUM OF POS SWITCH A
6940
MAXIMUM OF POS SWITCH B
6941
MAXIMUM OF POS SWITCH C
6942
MAXIMUM OF POS SWITCH D
6943
MAXIMUM OF POS SWITCH E
6944
MAXIMUM OF POS SWITCH F
6945
MAXIMUM OF POS SWITCH G
ポジションスイッチ1の動作設定範囲最大値を設定します。
設定値 : -99999999 ~ 99999999
7-86
2.パラメータ一覧
6950
MINIMUM OF POS SWITCH 1
6951
MINIMUM OF POS SWITCH 2
6952
MINIMUM OF POS SWITCH 3
6953
MINIMUM OF POS SWITCH 4
6954
MINIMUM OF POS SWITCH 5
6955
MINIMUM OF POS SWITCH 6
6956
MINIMUM OF POS SWITCH 7
6957
MINIMUM OF POS SWITCH 8
6958
MINIMUM OF POS SWITCH 9
6959
MINIMUM OF POS SWITCH A
6960
MINIMUM OF POS SWITCH B
6961
MINIMUM OF POS SWITCH C
6962
MINIMUM OF POS SWITCH D
6963
MINIMUM OF POS SWITCH E
6964
MINIMUM OF POS SWITCH F
6965
MINIMUM OF POS SWITCH G
ポジションスイッチ1の動作設定範囲最小値を設定します。
設定値 : -99999999 ~ 99999999
7-87
第7章 パラメータ
7000
PRT
MCM
BCS
SCS
TCS
7
6
PRT
MCM
6
5
92S
92S
MIN
TSE
MPR
MUS
7010
4
3
2
1
0
BCS
SCS
TCS
1 : DPRINT MACRO出力機能でスペース(ブランク)を出力します。
0 : DPRINT MACRO出力機能でスペース(ブランク)を出力しません
Mコードによるプログラム呼び出しで09006 - 09009を
1 : マクロ呼び出しをします。
0 : サブプログラム呼び出しをします。
第2補助コード(Bコード)によりカスタムマクロ(サブプログラム)を
1 : 呼び出します。
0 : 呼び出しません。
1 : Sコードによりカスタムマクロ(サブプログラム)を呼び出します。
0 : Sコードによりカスタムマクロ(サブプログラム)を呼び出しません。
1 : Tコードによりカスタムマクロ(サブプログラム)を呼び出します。
0 : T コードによりカスタムマクロ(サブプログラム)を呼び出しません。
7
7002
5
4
3
2
MIN
TSE
MPR
1
0
MUS
G92を実行した軸の絶対座標が0のときの機械座標値を、#900〜#907の該当
軸番号のアドレスに
1 : 保存します。
0 : 保存しません。
割り込みプログラムのNC文は
1 : ブロックの終了を待ってから実行します。
0 : ブロックを中断して実行します。
1 : 割り込み信号はステータストリガ方式です。
0 : 割り込み信号はエッジトリガ方式(立上り)です。
1 : 割り込み有効・無効のMコードはパラメータ設定(7033,7034)です。
0 : 割り込み有効・無効はM96/M97を使用します。
1 : 割り込み形カスタム・マクロを使用します。
0 : 割り込み形カスタム・マクロを使用しません。
7
6
5
4
3
2
1
0
[7
[6
[5
[4
[3
[2
[1
[0
7
6
5
4
3
2
1
0
]7
]6
]5
]4
]3
]2
]1
]0
未使用
7011
未使用
7-88
2.パラメータ一覧
7012
7
6
5
4
3
2
1
0
#7
#6
#5
#4
#3
#2
#1
#0
7
6
5
4
3
2
1
0
*7
*6
*5
*4
*3
*2
*1
*0
7
6
5
4
3
2
1
0
=7
=6
=5
=4
=3
=2
=1
=0
未使用
7013
未使用
7014
未使用
7033
MACRO INTERRUPT ON M CODE
カスタムマクロ割り込みを有効とするMコード番号の設定をします。
7034
MACRO INTERRUPT OFF M CODE
カスタムマクロ割り込みを無効とするMコード番号の設定をします。
7050
G CALLING NO.9010
プログラム番号9010のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7051
G CALLING NO.9011
プログラム番号9011のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7052
G CALLING NO.9012
プログラム番号9012のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7053
G CALLING NO.9013
プログラム番号9013のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7054
G CALLING NO.9014
プログラム番号9014のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7-89
第7章 パラメータ
7055
G CALLING NO.9015
プログラム番号9015のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7056
G CALLING NO.9016
プログラム番号9016のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7057
G CALLING NO.9017
プログラム番号9017のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7058
G CALLING NO.9018
プログラム番号9018のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7059
G CALLING NO.9019
プログラム番号9019のカスタムマクロを呼び出すGコードを設定します。
設定値 : -255~255
7071
M CALLING NO.9001
プログラム番号9001のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7072
M CALLING NO.9002
プログラム番号9002のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7073
M CALLING NO.9003
プログラム番号9003のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7074
M CALLING NO.9004
プログラム番号9004のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7075
M CALLING NO.9005
プログラム番号9005のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7-90
2.パラメータ一覧
7076
M CALLING NO.9006
プログラム番号9006のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7077
M CALLING NO.9007
プログラム番号9008のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7078
M CALLING NO.9008
プログラム番号9008のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7079
M CALLING NO.9009
プログラム番号9009のカスタムマクロを呼び出すMコードを設定します。
設定値 : 0~9999
7110
DRY RUN PROGRAM RESTART
(AX)
プログラムの再開でドライランで移動する軸の順番を指定します。
プログラムの再開後、ドライランで再開点まで移動させる時の軸の順番を制御軸番号
で指定します。
設定値 : 1~8
注) 制御軸に対してはパラメータ1020を参照してください。
7
7111
6
5
PRC
4
3
2
1
0
SPM
TPQ
EPR
PRC プログラム再開の実行時、途中で解除するときに
1 : 残り移動量を絶対座標にフィードバックして機械座標と絶対座標の関
係を回復します。
0 : 絶対座標が移動終了位置になり、位置関係が異なるようになります。
SPM 簡易プログラム再開で
1 : カーソル位置からG00、G28、G30を探して、そのブロックでプログラム
再開を実行します。
TPQ
ERP
0
1
0
1
0
:
:
:
:
:
カーソルがあるそのブロックでプログラム再開を実行します。
簡易プログラム再開をQモードで実行します。
簡易プログラム再開をPモードで実行します。
プログラム再開を簡易モードで実行します。
プログラム再開を従来のモードで実行します。
7-91
第7章 パラメータ
7
7120
TDH
TDH
HMU
3D2
3D1
CXC
TLX
7121
6
5
4
3
2
1
HMU
3D2
3D1
CXC
TLX
0
1 : 工具軸(直角)方向ハンドルFEEDモードを指定します。
0 : 工具軸(直角)方向ハンドルFEEDモードを指定しません。
1 : 工具軸(直角)方向ハンドルFEEDモードで複数のMPGを使用します。
0 : 工具軸(直角)方向ハンドルFEEDモードでひとつのMPGを使用します。
第2回転軸の座標値指定は
1 : パラメータ7126番の設定値。
0 : 工具軸(直角)方向ハンドルFEEDモードになった時、またはリセット時
の機械座標値。
第1回転軸の座標値指定は.
1 : パラメータ7125番の設定値。
0 : 工具軸(直角)方向ハンドルFEEDモードになった時、またはリセット時
の機械座標値。
1 : 4軸構成(第2回転軸座標値はいつも0)。
0 : 5軸構成。
1 : 工具軸の指定はX軸。
0 : 工具軸の指定はZ軸。
TOOL DIR. HANDLE STRUCTURE
(M)
工具軸(直角)方向ハンドルFEEDモードの軸構成を指定します。
設定値
1
2
3
4
工具軸
Z軸
X軸
Z軸
X軸
Z軸
X軸
Z軸
X軸
回転軸
A,C
B,A
B,C
C,A
A,B
B,C
A,B
B,C
(A軸マスタ)
(B軸マスタ)
(B軸マスタ)
(C軸マスタ
設定値 : 1~4
7122
TOOL DIR. HANDLE AXIS
(M)
工具軸方向ハンドルFEED軸(Z軸)を指定します。
設定値 : 1~制御軸数
7123
TOOL NOR. DIR. HANDLE X
工具軸直角方向ハンドルFEEDモードのX軸を指定します。
設定値 : 1~制御軸数
7-92
(M)
2.パラメータ一覧
7124
TOOL NOR. DIR. HANDLE Y
(M)
工具軸直角方向ハンドルFEEDモードのY軸を指定します。
設定値 : 1~制御軸数
7125
TOOL DIR. HANDLE 1ST ANG
(M)
工具軸(直角)方向ハンドルFEEDモードの第一回転軸の座標値を指定します。
設定値 : -360000~360000
7126
TOOL DIR. HANDLE 2ND ANG
(M)
工具軸(直角)方向ハンドルFEEDモードの第ニ回転軸の座標値を指定します。
設定値 : -360000~360000
7200
7
6
5
4
3
2
1
0
SAB
HSR
SFP
HSS
DS4
DS3
DS2
DS1
1 : SKIP信号の接点はB接点です。
0 : SKIP信号の接点はA接点です。
HSR
1 : SKIP信号のトリガーはHIGHレベルです。
0 : SKIP信号のトリガーはEDGEです。
SFP スキップ機能を実行中、その送り速度は、
1 : パラメータ(データ番号7211 - 7214)で設定された速度を使用します。
0 : プログラムで指令されたFコードの速度を使用します。
* SFPは HSSが1のとき有効です。
* 高速スキップ信号を使用せず従来タイプのスキップ信号を使用する
SAB
場合はパラメータ1400の SKF およびパラメータ1428を参照して下さ
い。
HSS
1 : スキップ機能に高速スキップ信号を使用します。
0 : スキップ機能に高速スキップ信号を使用しません。
DS1~DS4 : G04(ドウェル)に対してどのスキップ信号が有効となるがを設定しま
す。 信号と各ビットの対応は次のようになっています。
1 : 有効
従来タイプのSKIP信号
高速SKIP信号
BIT名
0 : 無効
SKIP1
SKIP
DS1
SKIP2
なし
DS2
SKIP3
なし
DS3
SKIP4
なし
DS4
7-93
第7章 パラメータ
7201
7
6
5
4
3
2
1
0
2S4
2S3
2S2
2S1
1S4
1S3
1S2
1S1
1S1 ~ 1S4 : G31またはG31.1のスキップ指令を有効にするスキップ信号をBIT名で
指定します。(“1”が有効です) 信号と各ビットの対応は次のよう
になっています
従来タイプのSKIP信号
SKIP1
SKIP2
SKIP3
SKIP4
高速SKIP信号
SKIP
なし
なし
なし
BIT名
1S1
1S2
1S3
1S4
2S1 ~ 2S4 : G31.2のスキップ指令を有効にするスキップ信号をBIT名で指定しま
す。(“1”が有効です) 信号と各ビットの対応は次のようになって
います。
従来タイプのSKIP信号
SKIP1
SKIP2
SKIP3
SKIP4
7202
高速SKIP信号
SKIP
なし
なし
なし
BIT名
2S1
2S2
2S3
2S4
7
6
5
4
3
2
1
0
4S4
4S3
4S2
4S1
3S4
3S3
3S2
3S1
3S1 ~ 3S4 : G31. 3のスキップ指令を有効にするスキップ信号をBIT名で指定しま
す。(“1”が有効です) 信号と各ビットの対応は次のようになって
います。
従来タイプのSKIP信号
高速SKIP信号
BIT名
SKIP1
SKIP
3S1
SKIP2
なし
3S2
SKIP3
なし
3S3
SKIP4
なし
3S4
4S1 ~ 4S4 : G31.4 のスキップ指令を有効にするスキップ信号をBIT名で指定しま
す。(“1”が有効です) 信号と各ビットの対応は次のようになって
います。
従来タイプのSKIP信号
高速SKIP信号
BIT名
SKIP1
SKIP
4S1
SKIP2
なし
4S2
SKIP3
なし
4S3
SKIP4
なし
4S4
7-94
2.パラメータ一覧
7211
FEEDRATE (G31, G31.1)
7212
FEEDRATE (G31.2)
7213
FEEDRATE (G31.3)
7214
FEEDRATE (G31.4)
スキップ機能の送り速度を設定します。このパラメータは、パラメータ"SFP"(パラ
メータ7200)が"1"で設定された場合に有効になります。
設定単位
IS-B
1.0
1.0
IS-A
10.0
10.0
直 線 軸
回 転 軸
IS-C
0.1
0.1
単位
mm/min.
deg/min.
設定値 : 0~32767
7
7300
5
4
3
2
MSK
MSK
AMH
MDC
7311
6
1
0
AMH
MDC
#5061,#5061にセーブされる位置データを
1
0
1
0
1
0
:
:
:
:
:
:
機械座標で入力します。
絶対座標で入力します。
自動工具補正(G37)に高速測定位置到達信号を使用します。
自動工具補正(G37)に高速測定位置到達信号を使用しません。
工具の測定を、現在のオフセット量に加算します。
工具の測定を、現在のオフセット量に減算します。
MEASUREMENT FEEDRATE 1
工具測定1(G37.1)の測定時の送り速度を設定します。
7312
MEASUREMENT FEEDRATE 2
工具測定1(G37.2)の測定時の送り速度を設定します。
7313
MEASUREMENT FEEDRATE 3
工具測定1(G37.3)の測定時の送り速度を設定します。
設定単位
IS-A
IS-B
IS-C
単位
直 線 軸
10.0
1.0
0.1
mm/min
設定値 : 1~6000
7321
GAMMA VALUE 1
工具測定1のγ値を設定します。
7-95
第7章 パラメータ
7322
GAMMA VALUE 2
工具測定2のγ値を設定します。
7323
GAMMA VALUE 3
工具測定3のγ値を設定します。
設定単位
IS-A
IS-B
IS-C
単位
直 線 軸
0.01
0.001
0.0001
mm
直線軸 (インチ入力)
0.001
0.0001
0.00001
inch
設定値 : -99999999~99999999
注1) 旋盤系の場合X軸は半径値で設定します。
注2) パラメータ工具測定ε値より大きい値を設定します。
7331
EPSILON VALUE 1
工具測定1のε値を設定します。
7332
EPSILON VALUE 2
工具測定2のε値を設定します。
7333
EPSILON VALUE 3
工具測定3のε値を設定します。
設定単位
IS-A
IS-B
IS-C
単位
直 線 軸
0.01
0.001
0.0001
mm
直線軸 (インチ入力)
0.001
0.0001
0.00001
inch
設定値 : -99999999~99999999
注1) 旋盤系の場合X軸は半径値で設定します。
7-96
2.パラメータ一覧
7
7400
6
5
4
3
2
1
0
ABT
SNG
PAG
LTM
SIG
GS2
GS1
ABT 工具交換方式Aにおいて復帰工具番号が現在使用中のグループと同じグルー
プでないとき
1 : アラー厶にします。
0 : アラー厶にしません。
SNG 工具寿命管理工具外の工具が選択されている時に工具スキップ信号が入力さ
れる時
1 : その信号を無視します。
0 : 最後に使用したグループまたは指令されたグループ(パラメータ"SIG"
による)工具をスキップします。
PAG 工具交換リセット信号が入力された時
1 : 登録されている全てのグループの実行データをクリアします。
0 : 指定されたグループの寿命を全うした時そのグループの実行データを
クリアします。
LTM 1 : 工具寿命を回数で指定します
0 : 工具寿命を時間で指定します。
SIG 1 : 工具スキップでグループ番号を入力します。
0 : 工具スキップでグループ番号を入力しません。
GS1,GS2 : 登録できる工具寿命グループ数とグループ一つ当りの登録可能な工具
数の組み合わせは次の表に従って設定します。
GS2
GS1
グループ数
工具数
0
0
16
16
0
1
32
8
1
1
0
1
64
128
4
2
7
6
5
4
3
7401
CT1, CR2 : 工具交換方式を次の表に従って設定します。
CT2
CT1
交換方式
0
0
A
0
1
B
1
0
C
1
1
D
7-97
2
1
0
CT2
(M)
CT1
(M)
第7章 パラメータ
7440
TOOL LIFE IGNORE
0 ~ 9999
(M)
ここに設定された値を越える数値がTコードで指令されるとTコード数値からこの設定
値を差し引いた値が工具寿命管理工具グループ番号になります。
設定値 : 0~9999
7470
(AX)
MASTER AXIS FOR SYNC
(M)
同期制御選択信号 SYNC1, SYNC2, SYNC3,..により同期制御を行う場合、どの軸と同
期制御を行うのかを設定します。
同期制御を行う軸のマスター軸番号を設定します。
(例) 次の場合パラメータを表示します。
第 1 軸 --- X 軸
第 4 軸 --- U 軸
第 2 軸 --- Y 軸
第 5 軸 --- W 軸
第 3 軸 --- Z 軸
同期制御選択信号 SYNC4, SYNC5により同期制御を行う場合、(X軸とU軸、Z軸と
W軸が同期制御)
パラメータ 7470 MASTER AXIS FOR SYNC.
X
0
U
1
Y
0
W
3
Z
0
7
7480
(AX)
TWT
TPN
TDC
PDC
TDA
PDA
6
5
4
3
2
1
0
TWT
TPN
TDC
PDC
TDA
PDA
1 : ツインテーブル制御機能を有効にします。
0 : ツインテーブル制御機能を無効にします。
同期運転時のトルク差によるフィードバック制御量の符号を反転します。
1 : 反転します。
0 : 反転しません。
同期運転時のマスタとスレーブのトルク差を減らすように
1 : 制御します。
0 : 制御しません。
同期運転時のマスタとスレーブの位置偏差量の差を減らすように
1 : 制御します。
0 : 制御しません。
同期運転時のマスタとスレーブのトルク差を
1 : チェックしてパラメータ7486の限界値を超える場合にアラームを表示
します。
0 : チェックしません。簡易同期運転にも有効。
同期運転時のマスタとスレーブの位置偏差量の差を
1 : チェックしてパラメータ7485の限界値を超える場合にアラームを表示
します。
0 : チェックしません。簡易同期運転にも有効。
7-98
2.パラメータ一覧
7481
(AX)
SYNCRO POSITION ERR P GAIN
各スレーブ軸の位置偏差制御比例ゲインを設定します。
設定範囲 : 0~32767 設定値が256の場合ゲインは1
7482
(AX)
SYNCRO POSITION ERR i GAIN
各スレーブ軸の位置偏差制御積分ゲインを設定します。
設定範囲 : 0~32767 設定値が256の場合ゲインは1
7483
(AX)
SYNCRO TORQUE P GAIN
各スレーブ軸のトルク制御比例ゲインを設定します。
設定範囲 : 0~32767 設定値が256の場合ゲインは1
7484
(AX)
SYNCRO TORQUE i GAIN
各スレーブ軸のトルク制御積分ゲインを設定します。
設定範囲 : 0~32767 設定値が256の場合ゲインは1
7485
(AX)
SYNCRO POSITION ERR LIMIT
各スレーブ軸の位置偏差の差の限界値を設定します。
同期制御の位置偏差の差がこの設定値を越えるとアラームを発生します。
パラメータ7480 <PDA> が0の場合は限界値チェックは無効になります。
設定範囲 : 0~32767 単位 : 検出単位(pulse)
7486
(AX)
SYNCRO TORQUE LIMIT
各スレーブ軸のトルクの差の限界値を設定します。
同期制御のトルクの差がこの設定値を越えるとアラームを発生します。
パラメータ7480 <PDA> が0の場合は限界値チェックは無効になります。
設定範囲 : 0~1000 単位 : 4.88mV
7
6
5
7600
4
3
2
1
2A1
0
1A1
2A1 : G37.2の指令に対して、高速信号(SKIP)が有効となるかを設定します。
1 : 有効 0 : 無効
1A1 : G37.1の指令に対して、高速信号(SKIP)が有効となるかを設定します
1 : 有効 0 : 無効
7
6
5
7601
4
3
2
1
0
3A1
3A1 : G37.3の指令に対して、高速信号(SKIP)が有効となるかを設定します。
1 : 有効 0 : 無効
7-99
第7章 パラメータ
7603
7
6
5
4
3
2
1
0
OP7
OP6
OP5
OP4
OP3
OP2
OP1
OP0
1
0
OP9
OP8
OP7 フィードオーバライドを
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP6 ハンドルのパルス当りの移動量の選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP5 ハンドル軸の選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP4 ジョグ送り/早送りの切り替えを
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP3 早送り速度の選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP2 ジョグ送り速度の選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP1 手動モードでの軸の選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
OP0 モードの選択を
1 : 機械の操作盤で行います。
0 : ソフトウェアオペレータズパネルで行います。
7
7604
OPF
6
5
4
OPD
OPC
3
2
OPF 未使用
OPD プロテクトキー G05.4 - G05.7信号の変化がある時に
1 : 画面が新しく変わります。
0 : 画面が変わりません。
OPC 1 : 主軸速度画面にオーバーライドカーソルを表示しません。
0 : 主軸速度画面にオーバーライドカーソルを表示します。
(ただしオーバーライド表示はPLC-NC信号 G18によって表示します。)
OP9 1 : プログラム画面でオペレータパネルのボタンを表示しません。
0 : プログラム画面でオペレータパネルのボタンを表示する。
OP8 フィードオーバーライドキャンセルを
1 : ソフトウェアオペレータズパネルで行いません。
0 : ソフトウェアオペレータズパネルで行います。
7-100
2.パラメータ一覧
7605
(AX)
PLC O.R.0 INTERVAL
PLCでオーバライド値(G12)が0に指定されている時、0になることを無効にする時
間を設定します。
単位 : msec
設定範囲 : 0~1000
7-101
第7章 パラメータ
8000
TAC
STF
BKM
1
0
1
0
:
:
:
:
7
6
5
4
3
2
1
TAC
STF
BKM
BAK
PRT
12C
NPA
0
サーマルアラームチェックを行いません。
サーマルアラームチェックを行います。
ハンドル運転でステップフィード機能を使用します。
ハンドル運転でステップフィード機能を使用しません。
1 : PLC/マクロデータを起動時に一度だけにファイルにセーブします。
0 : PLC/マクロデータを起動中に周期的にファイルにセーブします。
BAK パラメータ/ピッチ誤差/工具寿命データを
1 : 起動時に一度だけにファイルにセーブします。
0 : 起動中に周期的にファイルにセーブします。
PRT 1 : NCプログラムプロテクト機能を有効にします。
0 : NCプログラムプロテクト機能を無効にします。
12C 1 : 12V ダウンアラームチェックを行いません。(SENTORL-Zero/Mateの設定)
0 : 12V ダウンアラームチェックを行います。(SENTORL-eZの設定)
NPA アラームが発生
1 : しても画面は自動的にアラームメッセージを表示する画面に変えません。
0 : すれば画面が自動的にアラームメッセージを表示する画面に変えます。
0-bit 1 : SENTROL3で電源ダウン時にファイルの書き込みを禁止します。
0 : SENTROL3で電源ダウン時にファイルの書き込みを禁止しません。
8002
7
6
5
4
3
2
RPC
WSM
CAP
BZ2
BUZ
TPE
1
0
ENG
RPC グラフィク表示でスケーリングする時に範囲計算で早送りを
1 : 除外して切削送りの移動範囲だけを画面に表示します。
0 : 除外せずに切削送りおよび早送りすべてを画面に表示します。
WSM 1 : 検索、置き換えでワードの先頭から一部が一致しても実行します。
0 : 検索、置き換えでワード全体が一致すれば実行します。
CAP 1 : グラフィク対話入力を有効にします。
0 : メニュープログラミングを有効にします。
BZ2 1 : ブザー機能を無効にします。(ブザーコントロール2 オン)
0 : ブザー機能を有効にします。(ブザーコントロール2 オフ)
BUZ 1 : キーを押した時ブザーを鳴らしません。(ブザーコントロール1 オフ)
0 : キーを押した時ブザーを鳴らします。(ブザーコントロール1 オン)
TPE 1 : リセット状態 -> 自動運転状態時に、工具経路表示画面を消します。
0 : リセット状態 -> 自動運転状態時に、工具経路表示画面を消しません。
ENG 1 : 英語表示
0 : メイン言語表示 (ハングル、日本語、中国語)
7-102
2.パラメータ一覧
8003
PRB
NPT
CSM
ASD
FND
MCL
7
6
5
PRB
NPT
4
2
1
0
CSM
ASD
FND
MCL
1 : パラメータの入力を無視します。
0 : パラメータの入力を無視しません。
1 : PLCのFROM,TOの受信パラメータをNON PARITYにします。
0 : PLCのFROM,TOの受信パラメータをNON PARITYにしません。
ガスカットグラフィックのプレビュー画面で
1 : X-、 Y-方向をプラス方向にします。
0 : X-、 Y-方向をマイナス方向にします。
PLCのアドレス値(D500~D503)でスピンドルの実速度を
1 : 表示します。
0 : 表示しません。
1 : 実FEED値を表示しません。
0 : 実FEED値を表示します。
加工設定画面でマクロデータ入力位置に”CLR“メニューが
1 : 表示されます。
0 : 表示されません。
7
6
5
8004
未使用
8005
3
DISPLAY LANGAGE
メイン言語を選択します。
0:韓国語
1:日本語
2:中国語
7-103
4
3
2
1
0
第7章 パラメータ
8010
7
6
5
4
3
2
1
0
EOF
PSM
BMP
BZH
SWM
HLP
MEF
MEN
EOF
1 : '%'をプログラムの最後と認識せず'%'以後のデータも表示します。
0 : '%'をプログラムの最後と認識して'%'以後のデータも表示しません。
PSM
1
0
1
0
1
0
1
0
1
0
1
0
1
BMP
BZH
SWM
HLP
MEF
MEN
:
:
:
:
:
:
:
:
:
:
:
:
:
ハンドル運転位置データ設定を絶対座標で行います。
ハンドル運転位置データ設定を相対座標で行います。
グラフィック一覧表機能でビットマップデータを表示します。
グラフィック一覧表機能でNCプログラムを表示します。
ブザーの周波数を3000ヘルツにします。
ブザーの周波数を18000ヘルツにします。
グラフィックを右側セットタイプにします。
グラフィックを左側セットタイプにします(基本)。
パラメータヘルプ機能を使用します。
パラメータヘルプ機能を使用しません。
マクロデータを有効桁数指定をして表示します。
マクロデータを有効桁数指定をして表示しません。
マクロデータを有効桁数を12桁にします。
0 : マクロデータを有効桁数を8桁にします。
8011
7
6
5
4
3
2
1
0
ST2
ST1
EAC
UBC
UMC
CLT
SMF
OPK
ST2 ラダー画面で検索をする時に
1 : 最後では先頭に先頭では最後にスクロールして続けます。
0 : スクロール検索をしません。
ST1 1 : ラダー画面でアドレスを最初に検索する時に先頭から行います。
0 : ラダー画面でアドレスを最初に検索する時に表示位置から行います。
EAC 1 : PLCによる指定位置移動時に各軸ごとに速度指令ができるようにします。
0 : PLCによる指定位置移動時に全軸同じ速度指令をします。
UBC 1 : 加工設定画面でデータと単位の間に空白を挿入しません。
0 : 加工設定画面でデータと単位の間に空白を挿入します。
UMC 加工設定画面で自動モードとほかのモードを
1 : 区別して表示します。
0 : 区別して表示しません。
CLT 1 : テキスト計算機能を有効にします。
0 : テキスト計算機能を無効にします。
SMF 1 : 加工設定画面で小さなフォントを使用します。
0 : 加工設定画面で大きなフォントを使用します。
OPK 1 : パラメータ 2020,2021で使用するキーを確定します。
0 : パラメータ 2020,2021で使用するキーを確定しません。
7-104
2.パラメータ一覧
8012
7
6
5
4
3
2
1
0
AS1
AS0
RET
AMA
EPL
SCD
(L/G)
EAX
WNS
AS1 位置復帰機能座標系指定2
AS0 位置復帰機能座標系指定1
AS1
0
0
1
1
AS0
0
1
0
1
指定座標系
機械座標
絶対座標
相対座標
相対座標
RET
1 : 自動運転位置復帰機能を有効にします。
0 : 自動運転位置復帰機能を無効にします。
AMA PLCによる指定位置移動を
1 : 自動運転でも可能にします。 ( PLC軸で)
0 : 自動運転では不可能にします。
EPL
1 : 全軸リファレンス点復帰完了時にPLC軸を除外すします。
0 : 全軸リファレンス点復帰完了時にPLC軸を除外しません。
SCD
1 : 第2補助機能(Tコード)データ値をプログラム画面に表示します。 (L/G)
0 : 第2補助機能(Tコード)データ値をプログラム画面に表示しません。
EAX 1 : E軸を許します。
0 : E軸を許しません。
WNS ワーク番号サーチ機能で指定したプログラムを選択プログラムとして
1 : 記憶しません。
0 : 記憶します。
7
HD2
(16)
8013
HD2
SLR
NSC
OR3
1 :
0 :
1 :
0 :
1 :
0 :
G2.5
1 :
0 :
6
5
4
3
SLR
NSC
OR3
2
1
0
APS
MP2
2ヘッドパラメータ変換機能を有効にします。(16軸 NC)
2ヘッドパラメータ変換機能を無効にします。(16軸 NC)
ソフトオーバリミットアラームを自動リセットします。
ソフトオーバリミットアラームを自動リセットしません。
モード変更時に画面は変わりません。
モード変更時に画面は変わります。
<FDOR3>が1のとき
FEED OVERRID値を指定値の3倍にします。
FEED OVERRID値は指定値です。
7-105
第7章 パラメータ
APS 1 : 各軸ごとに座標系を指定します(G240 ~ G255). ただし、8011番のB2 <CTL>
が0である必要があります。
MP2
8014
G2**.1
G2**.0
指定座標系
0
1
1
0
0
1
機械座標
絶対座標
相対座標
0 : 全軸共通に座標系を指定します。
1 : 第2MPGをEPSの2番目のMPGコネクタに設置します。
0 : 第2MPGを既存の2番目のMPGコネクタに設置します。
7
6
5
4
3
2
1
0
AVP
SKM
MPF
DCR
DAC
N0E
N31
SCG
AVP AVO で指定された軸のエンコーダカウンタを利用して実速度(rpm)を計算しパラ
SKM
MPF
DCR
DAC
N0E
N31
SCG
メータ5642で指定したPLCアドレスに
1 : 出力します。
0 : 出力しません。
1 : SKIP機能を実行時、すべての軸に対して位置データを登録します。
0 : SKIP機能を実行時、指定された 軸に対して位置データを登録します。
1 : WHILE文をクリアするDPRINT文の形式選択。
0 : WHILE文をクリアないDPRINT文の形式選択。
1 : BPRINT文/DPRINT文のEOBは0DHです。
0 : BPRINT文/DPRINT文のEOBは0AHです。
1 : プレビュー表示時に Gコード文法アラームを表示しません。
0 : プレビュー表示時にもGコード文法アラームを表示します。
1 : N0000 コードの使用を許可します。
0 : N0000 コードの使用を許可しません。
1 : リバース/トレース機能を実行するときG31.1 SKIP機能を無視します。
0 : リバース/トレース機能を実行するときG31.1 SKIP機能を無視しません。
1 : G28.1実行時O9010のカスタムマクロを呼び出します。
0 : G28.1実行時O9010のカスタムマクロを呼び出しません。
7-106
2.パラメータ一覧
7
8015
DLT
DI4
DIM
DRT
RSM
DLT
6
5
4
3
2
1
0
DI4
DIM
DRT
RSM
RCC
(刺繍機)
HIC
パラメータ2202 B2 <HCH>を1にしている時、プログラム画面の右側に
1 : 工具番号を表示します。
0 : 工具番号を表示しません。
1 : DPRINT出力を利用したシステムで動作チェックをします。
0 : DPRINT出力を利用したシステムで動作チェックをしません。
DPRINT出力動作チェック時
1 : R400~R409に入力データ、R410に入力バイト数を書きます。
0 : R300~R309に入力データ、R310に入力バイト数を書きます。
ドリリング機でドリルの直径データとして
1 : 超硬ドリル用のデータを使用します。
0 : 従来のドリル用のデータを使用します。
1 : パラメータ1810の単位を最小移動単位にします。(デュアルポジション
機能を使っているときは無効)
0 : パラメータ1810の単位を最小移動単位にしません。
RCC G61G01のExact Stop時にインポジションの代りにサイクルカウンタがパラメー
タ6142,6143で設定した範囲内に入るとエレメント終了をする機能(G8.4がONの
とき)を
1 : 使用します。
0 : 使用しません。
HIC 自動運転モードで運転状態が解除状態になった時
1 : ハンドルインタラプトオフセットをクリアします。
0 : ハンドルインタラプトオフセットをクリアしません。
8020
PATTERN FIRST DISPLAY NO
加工設定プログラム(O9500~9599)の9500を引いた値を設定し、画面設定選択時にその
番号(O9500+設定番号)で指定した画面があらわれます。
設定値 : 0~499
7-107
第7章 パラメータ
7
CN6
CN5
CN4
CN3
CN2
CN1
CN0
CNF
CNE
CND
CNC
CNB
CNA
CN9
CN8
4
3
2
1
0
1 : 遠隔操作データ受信確認を有効にします。
0 : 遠隔操作データ受信確認を無効にします。
1 : ファイル情報の更新制御を有効にします。
0 : ファイル情報の更新制御を無効にします。
1 : ファイル情報のコメントを付けます。
0 : ファイル情報のコメントを付けません。
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
ファイル受信要求の高速通信を有効にします。
ファイル受信要求の高速通信を無効にします。
ファイル送信要求の高速通信を有効にします。
ファイル送信要求の高速通信を無効にします。
ファイル情報の高速通信を有効にします。
ファイル情報の高速通信を無効にします。
ファイル受信要求の受付を許可します。
ファイル受信要求の受付を許可しません。
ファイル送信要求の受付を許可します。
ファイル送信要求の受付を許可しません。
7
8101
5
CN7
CN6
CN5
CN4
CN3
CN2
CN1
CN0
(i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO)
8100
CN7
6
6
5
4
3
2
1
0
CNF
CNE
CND
CNC
CNB
CNA
CN9
CN8
(i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO)
未使用
未使用
1 : LANケーブルをはずしてもアラームにはならない。
0 : LANケーブルをはずすとアラームになる。
1 : SENTROL2がリセット状態でない時にもSnetとの通信可能。
0 : SENTROL2がリセット状態でない時には Snetとの通信不可能。
三菱PLCとの通信でライト命令を失敗すると
1 : データをバファーに保存して後で場ファ内のデータを送信します。
0 : 後で再びデータを集めて送信します。
三菱PLCとの通信でリード命令に対する応答を受信した後NC内部のPLCを
1 : 処理してライト命令を送信します。
0 : 処理せずにライト命令を送信します。
三菱PLCとの通信で
1 : データを受信した後すぐに次の命令を送信します。
0 : 命令を先に送信した後で受信データを処理します。
1 : ネットワークで受信データを即時処理します。
0 : ネットワークで受信データをひとつずつ処理します。
7-108
2.パラメータ一覧
8110
NETWORK MAX CONNECTION
(i,PRO)
ネットワークにつなぐ台数の最大値を設定します。
設定値 : 1~100
8111
NETWORK RESPONSE DELAY
(i,PRO)
ネットワークの応答時間の遅れを設定します。
設定値 : 1~10000
単位 : msec
8120
NET COMMAND REPEAT PERIOD
(i,PRO)
ネットワークの命令反復回数を設定します。
設定値 : 1~10
8121
NET COMMAND REPEAT TIMES
(i,PRO)
ネットワークの命令反復回数を設定します。
設定値 : 1~10
8123
DIR COMMAND REPEAT TIMES
(i,PRO)
ファイル情報反復回数を設定します。
設定値 : 1~10
8124
DIRECTORY PACKET SIZE
(i,PRO)
ファイル情報パケットの大きさを設定します。
設定値 : 512~1024 単位 : バイト
8125
FILE COMMAND REPEAT PERIOD
(i,PRO)
ファイル送受信反復周期を設定します。
設定値 : 1~10000
単位 : msec
8126
FILE COMMAND REPEAT TIMES
ファイル送受信反復回数を設定します。
設定値 : 1~10
7-109
(i,PRO)
第7章 パラメータ
8127
FILE PACKET SIZE
(i,PRO)
ファイル送受信パケットの大きさを設定します。
設定値 : 512~1024 単位 : バイト
8128
NUMBER OF FILE PACKETS
(i,PRO)
ファイル送受信パケットの数を設定します。
設定値 : 1~10
7
8150
NB7
NB5
NB2
NB1
NB0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
4
3
2
1
0
6
5
4
3
2
1
0
NBF
NBE
NBD
NBC
NBB
NBA
NB9
NB8
(i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO)
8151
NB8
5
ハンドル軸の単位遠隔設定機能を有効にします。
ハンドル軸の単位遠隔設定機能を無効にします。
遠隔運転での開始・停止・リセット機能を有効にします。
遠隔運転での開始・停止・リセット機能を無効にします。
パラメータ遠隔修正機能を有効にします。
パラメータ遠隔修正機能を無効にします。
ファイル送受信機能を有効にします。
ファイル送受信機能を無効にします。
遠隔モニターリング機能を有効にします。
遠隔モニターリング機能を無効にします。
7
NBA
6
NB7
NB6
NB5
NB4
NB3
NB2
NB1
NB0
(i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO) (i,PRO)
1
0
1
0
:
:
:
:
全てのファイルを受信できます。
加工プログラムだけ受信できます。
遠隔速度調節機能を有効にします。
遠隔速度調節機能を無効にします。
7
6
5
8152
未使用
7-110
4
3
2
1
0
2.パラメータ一覧
7
8160
CAX
DUL
M3D
LMC
L2C
LNH
LNS
8161
6
CAX
5
4
3
2
1
0
DUL
(i)
M3D
(i)
LMC
(i)
L2C
(i)
LNH
(i)
LNS
(i)
スレーブNCで軸位置データ出力(固定アドレス)を
1 : します。
0 : 取り消します。
マクロデータを
1 : 符合なしの整数タイプ(4バイト、0~FFFFFFH)処理します。
0 : 小数点以下有効にします。
1 : マクロデータは小数点3桁(1/1000)まで有効です。
0 : マクロデータは小数点2桁(1/100)まで有効です。
PLC-LAN通信の2ポートのデータを
1 : マクロデータに指定。
0 : PLCデータに指定。
PLC-LAN通信の
1 : 2ポート有効 (スレーブ)(ホストの場合は使いません。)
0 : 2ポート無効 (スレーブ)
1 : PLC LAN通信機能をホストで実行します。
0 : PLC LAN通信機能をホストで実行しません。
1 : PLC LAN通信機能を有効にします。
0 : PLC LAN通信機能を無効にします。
LAN PLC TERGET NC1 IP1
(i)
ターゲットNC1のIPアドレス1。
設定値 : 1~255
8162
LAN PLC TERGET NC1 IP2
(i)
ターゲットNC1のIPアドレス2。
設定値 : 1~255
8163
LAN PLC TERGET NC1 IP3
(i)
ターゲットNC1のIPアドレス3。
設定値 : 1~255
8164
LAN PLC TERGET NC1 IP4
ターゲットNC1のIPアドレス4。
設定値 : 1~255
7-111
(i)
第7章 パラメータ
8165
LAN PLC TERGET NC1 PORT NO
(i)
ターゲットNC1のポート番号。
設定値 : 0、5000~5999
8166
LAN PLC TERGET NC1 IN ADDRESS
(i)
ターゲットNC1から受け取るデータの開始アドレス。
設定値 : 1~1999
8167
LAN PLC TERGET NC1 IN SIZE
(i)
ターゲットNC1から受け取るデータのバイト数。
設定値 : 1~200
8168
LAN PLC TERGET NC1 OUT ADDRESS
(i)
ターゲットNC1に送るデータの開始アドレス。
設定値 : 1~1999
8169
LAN PLC TERGET NC1 OUT SIZE
(i)
ターゲットNC1送るデータのバイト数。
設定値 : 1~200
8171
LAN PLC TERGET NC2 IP1
(i)
ターゲットNC2のIPアドレス1。
設定値 : 1~255
8172
LAN PLC TERGET NC2 IP2
(i)
ターゲットNC2のIPアドレス2。
設定値 : 1~255
8173
LAN PLC TERGET NC2 IP3
(i)
ターゲットNC2のIPアドレス3。
設定値 : 1~255
8174
LAN PLC TERGET NC2 IP4
(i)
ターゲットNC2のIPアドレス4。
設定値 : 1~255
8175
LAN PLC TERGET NC2 PORT NO
7-112
(i)
2.パラメータ一覧
ターゲットNC2のポート番号。
設定値 : 0、5000~5999
8176
LAN PLC TERGET NC2 IN ADDRESS
(i)
ターゲットNC2から受け取るデータの開始アドレス。
設定値 : 1~1999
8177
LAN PLC TERGET NC2 IN SIZE
ターゲットNC2から受け取るデータのバイト数。
設定値 : 1~200
7-113
(i)
第7章 パラメータ
8178
LAN PLC TERGET NC2 OUT ADDRESS
(i)
ターゲットNC2に送るデータの開始アドレス。
設定値 : 1~1999
8179
LAN PLC TERGET NC2 OUT SIZE
(i)
ターゲットNC2送るデータのバイト数。
設定値 : 1~200
8400
SPEED MAX ( ABI )
(i)
高速精密加工時の補間前直線型加減速の加速度を決めるパラメータで最高速度を設定
します。
設定値 : 0~32767
単位 : 10mm/min
8401
TIME CONSTANT ( ABI )
(i)
高速精密加工時の補間前直線型加減速の加速度を決めるパラメータで最高速度までの
時間を設定します。
設定値 : 0~4000
単位 : msec
送り速度 V
[mm/min]
パラメータ8400
時間 T [sec]
パラメータ 8401
7-114
2.パラメータ一覧
8402
OVP
1 :
0 :
INP 1 :
0 :
Bit4 1 :
0 :
DT2, DT1,
7
6
OVP
(i)
INP
(i)
HS3
HS2
HS1
HS0
3
-
2
1
0
DT2
(i)
DT1
(i)
DT0
(i)
DT2
DT1
DT0
分配周期
実行ブロック速度
備 考
0
0
0
8msec
125block/sec
標準設定
0
0
1
4msec
250block/sec
0
1
0
2msec
500block/sec
0
1
1
1msec
1000block/sec
1
0
0
0.5msec
2000block/sec
6
5
HS6
(i)
8403
HS4
4
オーバーラップ機能を有効にします。
オーバーラップ機能を無効にします。
最大速度クランプを無効にします。
最大速度クランプを有効にします。
エッジ停止ブロックでインポジションチェックを行います。
エッジ停止ブロックでインポジションチェックを行いません。
DT0
分配周期の設定します。設定値と分配周期の関係は次のようになります。
SENTROL2の標準は分配周期 8msecで、ソフトウエアーオプションで4msec
を設定できます。
7
HS6
5
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
ソフトウエアー
オプション 仕様
ハードウエアー
オプション仕様
ハードウエアー
オプション仕様
ハードウエアー
オプション仕様
4
3
2
1
0
HS4
(i)
HS3
(i)
HS2
(i)
HS1
(i)
HS0
(i)
加速度クランプ機能を有効にします。
加速度クランプ機能を無効にします。
速度クランプによる事前減速機能を有効にします。
速度クランプによる事前減速機能を無効にします。
微小ブロックによる速度クランプを有効にします。
微小ブロックによる速度クランプを無効にします。
経路自動修正機能を有効にします。
経路自動修正機能を無効にします。
経路自動修正機能を無効にします。
微小ブロック消去機能を無効にします。
補間前ベル型加減速を有効にします。
補間前ベル型加減速を無効にします。
7-115
第7章 パラメータ
8404
TIME CONSTANT L ( ABI )
(i)
高速精密加工時の補間前BELL型加減速の加速度を決めるパラメータで最高速度までの
時間中直線部の時間を設定します。
設定値 : 0~4000
単位 : msec
8405
TIME CONSTANT S ( ABI )
(i)
高速精密加工時の補間前BELL型加減速の加速度を決めるパラメータで最高速度までの
時間中曲線部の時間を設定します。
設定値 : 0~4000
単位 : msec
7
8406
C01
6
5
4
3
2
1
0
2
1
0
C01
1 : 高速加工中G00をG01加減速処理します。
0 : 高速加工中G00をG01加減速処理しません。
7
6
5
4
3
8407
未使用
8410
(AX)
CORNER VELOCITY DIFF
(i)
コーナからの各軸毎の速度変化量制限値を設定します。
設定値 : 0~32767
単位 : mm/min
速度変化量制限値まで減速
送り速度 V
[mm/min]
時間 T [msec]
8411
(AX)
TIME CONSTANT FOR MAX ACCEL
(i)
各軸の許容加速度用時定数、最高速度(パラメータ1422)に到達する時間を設定しま
す。
設定値 : 0~32767
単位 : msec
7-116
2.パラメータ一覧
8412
IGNORED VELOCITY FLUCTUATION
(i)
無視することのできる速度変化を比率で設定します。
設定値 : 0~100
単位 : %
標準値 : 10 %
8415
AREA2 OVERRIDE
(i)
エリア 2でのオーバーライド値を設定します。
設定値 : 0~100
単位 : %
標準値 : 80 %
AREA1 :
0°≤ θ< 30°
AREA2 : 30°≤ θ< 45°
AREA3 : 45°≤ θ< 60°
θ
8416
AREA4 : 60°≤ θ< 90°
AREA2 OVERRIDE
(i)
エリア 3でのオーバーライド値を設定します。
設定値 : 0~100
単位 : %
標準値 : 70 %
8417
AREA4 OVERRIDE
(i)
エリア 4でのオーバーライド値を設定します。
設定値 : 0~100
単位 : %
標準値 : 60 %
8418
TIME CONSTANT ( AAI )
(i)
高速固定加工モード(G61.1)中の補間後直線加減速の時定数を設定します。
パラメータ1400 <LAI> = 1 の場合に有効です。
設定値 : 0~100
単位 : msec
標準値 : 8
8419
CORNER ANGLE
(i)
高速固定加工モード(G61.1)中のコーナ角度の変化量がこの値を越えると減速停止を
します。
設定値 : 0~90
単位 : deg
標準値 : 15
7-117
第7章 パラメータ
8420
(AX)
CUTTING INPOSITION
(i)
パラメータ8402 <INP>=1 の場合、高速固定加工モード(G61.1)中の減速停止時にイン
ポジションチェックするインポジション幅を設定します。
設定単位 : 検出単位(pulse) 設定範囲 : 0~1000
8422
(AX)
FEED FORWARD GAIN1
(i)
フィードフォワードゲイン1の定数を設定します。
設定値 : 0~100
8423
(AX)
FEED FORWARD GAIN2
(i)
フィードフォワードゲイン2の定数を設定します。
設定値 : 0~32767
8424
(AX)
F.F. FILTER TIME CONSTANT
(i)
ロウパスフィルタの時間設定。
設定値 : 0~64
8425
POSITION TOLERANCE
(i)
ローパスフィルタの時間
設定値 : 0~64
8426
TOLERANCE TO ERASE SMALL BLOCK
(i)
微小ブロック消去用許容経路誤差を設定します。
設定値 : 0~1000
8427
TOLERANCE FOR SMOOTHING
(i)
経路自動修正用許容経路誤差を設定します。
設定値 : 0~1000
8428
VEL CTRL LOW CLMP DISTANCE
(i)
高速加工機能で角度による速度クランプのクランプ値を設定値します。
設定値 : 0~999999
8429
VEL CTRL LOW CLMP FEEDRATE
高速加工機能で角度による速度クランプのクランプ値を設定値します。
設定値 : 0~999999
7-118
(i)
2.パラメータ一覧
8430
G00 ->G01 DISTANCE
(i)
高速加工中にG00にG01加減速処理を適用するG00の移動距離を設定します。
この距離よりも移動距離が小さいとG00をG01加減速処理します。
パラメータ8406 B6 <C01>でこの処理を行うか否かを指定します。
設定値 : 0~999999
8431
DELETE BLOCK DISTANCE
(i)
ここで設定された値より短いブロックを消去します。
設定値 : 0~999999 単位:設定単位
8432
VERTICAL CHK DISTANCE 1
(i)
第1ブロックの最小長を設定します。
設定値 : 0~999999 単位:設定単位
8433
VERTICAL CHK DISTANCE 2
(i)
第2ブロックの最小長を設定します。
設定値 : 0~999999 単位:設定単位
8434
MACRO SCOPIC DISTANCE
(i)
検査対象ブロックの最小の長さを設定します。
設定値 : 0~999999 単位:設定単位
직 선 축
회 전 축
IS-A
0.01
0.01
설정단위
IS-B
0.001
0.001
7-119
IS-C
0.0001
0.0001
단위
mm
deg
第7章 パラメータ
9000
PC DIAG. MAX DISP : X
PLC診断画面で指令 "X"の最大値番号を設定します。
設定値 : 0~432
9001
PC DIAG. MAX DISP : Y
PLC診断画面で指令 "Y"の最大値番号を設定します。
設定値 : 0~432
9002
PC DIAG. MAX DISP : R
PLC診断画面で指令 "R"の最大値番号を設定します。
設定値 : 0~519
9003
PC DIAG. MAX DISP : D
PLC診断画面で指令 "D"の最大値番号を設定します。
設定値 : 0~511
9010
ES4
SPS
RPS
ESB
IO4
IO3
IO2
IO1
7
6
5
4
3
2
1
0
ES4
SPS
RPS
ESB
I04
I03
I02
I01
1 : EPS4/MPS7ボードのアナログ入力を使用します
0 : EPS4/MPS7ボードのアナログ入力を使用しません。
1 : スピンドル軸を使用しません。
0 : スピンドル軸を使用します。
1 : G43.5,G43.6でEPSから出て行く電圧が+/- 反対になって出て行きます。
0 : G43.5,G43.6でEPSから出て行く電圧はそのままです。
1 : 2番目のEPS4のアナログ入力の使用を可能にします。
0 : 2番目のEPS4のアナログ入力を使用しません。
1 : DIO3ボードNO. 4が設置されています。
0 : DIO3ボードNO. 4が設置されていません。
1 : DIO3ボードNO. 3が設置されています。
0 : DIO3ボードNO. 3が設置されていません。
1 : DIO3ボードNO. 2が設置されています。
0 : DIO3ボードNO. 2が設置されていません。
SENTROL2/PNC2/PNC2の場合
1 : DIO3ボードNO. 1が設置されています
0 : DIO3ボードNO. 1が設置されていません。
SENTROL-Zero/Mate/eZの場合
1 : MPS7/DIO7ボードが設置されています。
0 : MPS7/DIO7ボードが設置されていません。
7-120
2.パラメータ一覧
9011
RDM
AVR
RIS
R12
R11
R1A
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
9012
R28
R27
R26
R25
R24
R23
R22
R21
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
7
6
5
RDM
AVR
RIS
4
3
2
1
0
R12
R11
R1A
RADボードの入力電圧を瞬間電圧にします。
RADボードの入力電圧を平均電圧にします。
EPS4ボードのアナログ入力(NO.1)の符合を反転します。
EPS4ボードのアナログ入力(NO.1)の符合を反転しません。
RIO1、RIO2、RADボードの状態をPLCのR506 ~ R508に出力します。
RIO1、RIO2、RADボードの状態をPLCのR506 ~ R508に出力しません。
RIO1ボードNO.2が設置されています。
RIO1ボードNO.2が設置されていません。
RIO1ボードNO.1が設置されています。
RIO1ボードNO.1が設置されていません。
RIO1ボードを自動的に認識します。
RIO1ボードを自動的に認識しません。
7
6
5
4
3
2
1
0
R28
R27
R26
R25
R24
R23
R22
R21
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
RIO2ボード
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
NO.
8が設置されています。
8が設置されていません。
7が設置されています。
7が設置されていません。
6が設置されています。
6が設置されていません。
5が設置されています。
5が設置されていません。
4が設置されています。
4が設置されていません。
3が設置されています。
3が設置されていません。
2が設置されています。
2が設置されていません。
1が設置されています。
1が設置されていません。
7-121
第7章 パラメータ
9013
AD8
AD7
1
0
1
0
:
:
:
:
7
6
5
4
3
2
1
0
AD8
AD7
AD6
AD5
AD4
AD3
AD2
AD1
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
CH8を使用します。
CH8を使用しません。
CH7を使用します。
CH7を使用しません。
AD6
1 : RAD1ボードのアナログ電圧入力 CH6を使用します。
0 : RAD1ボードのアナログ電圧入力 CH6を使用しません。
AD5
1
0
1
0
1
0
1
0
1
0
AD4
AD3
AD2
AD1
:
:
:
:
:
:
:
:
:
:
9014
GM7
GM6
GM5
GM4
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
RAD1ボードのアナログ電圧入力
CH5を使用します。
CH5を使用しません。
CH4を使用します。
CH4を使用しません。
CH3を使用します。
CH3を使用しません。
CH2を使用します。
CH2を使用しません。
CH1を使用します。
CH1を使用しません。
7
6
5
4
3
2
1
0
GM7
GM6
GM5
GM4
GM3
GM2
GM1
GMA
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
ガス切断機
F7
F7
F6
F6
F5
F5
F4
F4
キーメニューをマスクします。
キーメニューをマスクしません。
キーメニューをマスクします。
キーメニューをマスクしません。
キーメニューをマスクします。
キーメニューをマスクしません。
キーメニューをマスクします。
キーメニューをマスクしません。
GM3
1 : ガス切断機 F3 キーメニューをマスクします。
0 : ガス切断機 F3 キーメニューをマスクしません。
GM2
1
0
1
0
1
0
GM1
GMA
:
:
:
:
:
:
ガス切断機 F2 キーメニューをマスクします。
ガス切断機 F2 キーメニューをマスクしません。
ガス切断機 F1 キーメニューをマスクします。
ガス切断機 F1 キーメニューをマスクしません。
ガス切断機キーメニューを全部マスクします。
ガス切断機キーメニューを全部マスクしません。
7-122
2.パラメータ一覧
7
6
5
4
9015
3
2
1
0
R2C
R2B
R2A
R29
第3番目のEPS3/4ボードを装着しRIO2ボードを最大12枚まで連結できるようにするパ
ラメータ
R2C
1 : RIO2ボードNO.12が設置されています。
0 : RIO2ボードNO.12が設置されていません。
R2B
1 : RIO2ボードNO.11が設置されています。
0 : RIO2ボードNO.11が設置されていません。
R2A
1 : RIO2ボードNO.10が設置されています。
0 : RIO2ボードNO.10が設置されていません。
R29
1 : RIO2ボードNO.9が設置されています。
0 : RIO2ボードNO.9が設置されていません。
7
6
5
4
3
2
1
0
9016
WIR
WIR
9017
1 : AnyWire(UniWire)を使用します。
0 : AnyWire(UniWire)を使用しません。
7
6
5
4
3
2
1
0
WA8
WA7
WA6
WA5
WA4
WA3
WA2
WA1
WA1:CH1, WA2:CH2, WA3:CH3, WA4:CH4, WA5:CH5, WA6:CH6, WA7:CH7, WA8:CH8
9018
7
6
5
4
3
2
1
0
OR7
OR6
OR5
OR4
OR3
OR2
OR1
OR0
移動実速度をF142~F145に出力する時の対象軸を指定します。
CR0:第1軸, CR1:第2軸, CR2:第3軸, CR3:第4軸……
7
9019
APV
6
5
APV
4
3
2
1
0
ORB
ORA
OR9
OR8
1: スピンドル1の電圧出力の速度到達比率の調節機能を有効にします。
0: スピンドル1の電圧出力の速度到達比率の調節機能を無効にします。
移動実速度をF142~F145に出力する時の対象軸を指定します。(16軸の時だけ対応)
CR8:第9軸, CR9:第10軸, CRA:第11軸, CRB:第12軸
7-123
第7章 パラメータ
9020
7
6
5
4
3
2
ES8
ES7
ES6
ES5
ES4
ES3
ES8
1 : EPS8基板の8ch D/A出力を使用します。
0 : EPS8基板の8ch D/A出力を使用しません。
ES7
1
0
1
0
1
0
1
0
1
0
ES6
ES5
ES4
ES3
:
:
:
:
:
:
:
:
:
:
EPS8基板の7ch
EPS8基板の7ch
EPS8基板の6ch
EPS8基板の6ch
EPS8基板の5ch
EPS8基板の5ch
EPS8基板の4ch
EPS8基板の4ch
EPS8基板の3ch
EPS8基板の3ch
7
EEP
USP
MAB
ML1
MTL
9031
1
0
1
0
1
0
1
0
1
0
1
0
:
:
:
:
:
:
:
:
:
:
:
:
0
D/A出力を使用します。
D/A出力を使用します。
D/A出力を使用します。
D/A出力を使用しません。
D/A出力を使用します。
D/A出力を使用しません。
D/A出力を使用します。
D/A出力を使用しません。
D/A出力を使用します。
D/A出力を使用しません。
5
SPA
(SDI)
9030
SPA
6
1
4
3
2
1
0
EEP
(SDI)
USP
(SDI)
MAB
(SDI)
ML1
(SDI)
MTL
(SDI)
第2、第3のスピンドル出力を使用します。
第2、第3のスピンドル出力を使用しません。
メカトロリンクでアブソリュートエンコーダを使用します。
メカトロリンクでアブソリュートエンコーダを使用しません。
メカトロリンク機能を使用します。
メカトロリンク機能を使用しません。
SERVO ON Delay Time
サーボオンするタイミングを送らせる時間を指定します。
設定単位 : msec
設定範囲 : 0~1000
7-124
(SDI)
2.パラメータ一覧
9090
9091
9092
9093
9094
9095
7
6
5
4
3
2
1
0
DB7
DBF
DBN
DBV
DB*
DB6
DBE
DBM
DBU
DB/
DB5
DBD
DBL
DBT
DB-
DB4
DBC
DBK
DBS
DB+
DB3
DBB
DBJ
DBR
DBZ
DB2
DBA
DBI
DBQ
DBY
DB1
DB9
DBH
DBP
DBX
DB0
DB8
DBG
DBO
DBW
(AX)
開発デバッグ用パラメータ
9096
(AX)
AXIS PARAMETER 1 (DEBUG)
9097
(AX)
AXIS PARAMETER 2 (DEBUG)
開発デバッグ用パラメータ
7-125
第7章 パラメータ
3. 機能別パラメータリスト
3.1 パラメータリスト 1 (ユーザ用)
1.
2.
3.
4.
5.
6.
7.
8.
通信
ワーク座標、第2原点
ストロークチェック
固定サイクル
工具補正
プログラム
モーダル情報
マクロ文
3.2 パラメータリスト 2 (システム構成者用)
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
軸制御
回転軸制御
サーボ設定
アブソリュートエンコーダ
簡易同期制御
シリアルディジタルインターフェイス
軸移動
原点復帰
デュアルポジションフィードバック機能
オシレーション機能
ハンドルインタラプト機能
工具軸(直角)方向ハンドルフィード機能
高速加工機能
ハードウェア構成設定
システム構成設定
I/O機器制御
タッチパネル設定
オペレータパネル設定
MST機能
機械精度補正
自動工具測定
工具寿命/工具交換
アラームキャンセル設定
画面表示設定
加工条件設定画面設定
PLC保守設定
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
スキップ機能
リバース/リトレース機能
自動運転位置復帰(リターン)機能
ブロックオーバーラップ機能
ポジションスイッチ機能
プログラム再開/リスタート機能
リジットタッピング機能
マクロインタラプト機能
スピンドル設定
ネットワーク
遠隔操作機能
ガス切断機用機能設定
レーザ/プラズマ 切断機用機能設定
(トレース機能)
ウォータジェット断機用機能設定
1軸走行丸のこ盤用機能設定
布団刺繍機用機能設定
服地裁断機用機能設定
研削機用機能設定
ポイントボーリング木工機械用機能設定
グラススクライビング機用機能設定
ホブ盤用機能設定
スピニングマシン用機能設定
49. その他
99. オプション
7-126
3. 機能別パラメータリスト
3.1 パラメータリスト 1 (ユーザ用)
3.1 パラメータリスト 1 (ユーザ用)
パラメータの内容
番号
1. 通信
内容
*印は IS-B単位
プログラム出力時、データ出力完了後にDC3を出力する
0000
DC3
1
出力コードをEAIで行う
EIA
1
ISOコードでEOBを出力する時に“LF”を出力する
NCR
1
ISOコードにはパリティビットが無い
ISP
1
コントロールアウト中にはTVチェックを行なわない
CTV
1
TVC
1
D24
1
TVチェックを行う
加工プログラムをRS232Cで 出力時に DC2,DC4を出力する.
0011
フォアグラウンド用入力機器のI/F番号を設定する
0020
0
フォアグラウンド用出力機器のI/F番号を設定する
0021
0
RS232C-1に接続するI/O デバイス番号を設定する
5001
1~6
RS232C-2に接続するI/O デバイス番号を設定する
5002
1~6
デバイス番号1に対応するデバイスのI/F仕様を設定する
5110
1~4
デバイス番号1のストップビットを設定する
5111
1~2
デバイス番号1のボーレートを設定する
5112
8~15
デバイス番号2〜6の設定
5120 ~ 5162
M99をプログラムの最後と見なす
2200
NM9
0
M02, M30, M99をプログラムの最後と見なす
NPE
0
同じ番号のプログラムを登録するときに上書きして登録する
REP
1
複数のプログラムを登録する時先に削除する
RDL
1
‘ % ’をファイルの最後と認識しないで、その後のデータも
表示する
8010
EOF
1
ディスクでNCプログラムを入力する時、表示できないコードを
削除する
6403
DDM
1
2. ワーク座標、第2原点
ワーク座標系シフト量を設定する
1220
*㎛(0.001deg)
G54座標系シフト量を設定する
1221
*㎛(0.001deg)
G55座標系シフト量を設定する
1222
*㎛(0.001deg)
G56座標系シフト量を設定する
1223
*㎛(0.001deg)
G57座標系シフト量を設定する
1224
*㎛(0.001deg)
G58座標系シフト量を設定する
1225
*㎛(0.001deg)
G59座標系シフト量を設定する
1226
*㎛(0.001deg)
第1原点シフト量を設定する
1240
*㎛(0.001deg)
第2原点シフト量を設定する
1241
*㎛(0.001deg)
第3原点シフト量を設定する
1242
*㎛(0.001deg)
第4原点シフト量を設定する
1243
*㎛(0.001deg)
7-127
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
3. ストロークチェック
設定エリアの外側を禁止エリアにする
5200
ソフトオーバーリミットトラベルを移動前にあらかじめチェックする
ストアードストロークリミット1を軸ごとにチェックする
5210
OUT
1
PCO
1
OT1
ストアードストロークリミット2を軸ごとにチェックする
OT2
ストアードストロークリミット3の内側を禁止領域にするとき
軸ごとにチェックする
OT3
ストロークリミット 1の+方向座標値
5220
*㎛(0.001deg)
ストロークリミット 1の─方向座標値
5221
*㎛(0.001deg)
ストロークリミット 2の+方向座標値
5222
*㎛(0.001deg)
ストロークリミット 2の─方向座標値
5223
*㎛(0.001deg)
ストロークリミット 3の+方向座標値
5224
*㎛(0.001deg)
ストロークリミット 3の─方向座標値
5225
*㎛(0.001deg)
ストロークリミット 1_2の+方向座標値
5226
*㎛(0.001deg)
ストロークリミット 1_2の─方向座標値
5227
*㎛(0.001deg)
4. 固定サイクル
高速固定サイクル有効
2201
HSC
穴あけ加工サイクルG76, G87のシフト処理送り方法を選択
6200
SRP
1
固定サイクルで位置決定方式は早送り
FCU
0
G76, G87で工具が逃げる方向をI、J、Kで指定する
SIJ
1
G74, G84でドウェル指令は無効
DWL
0
FXY
0
NRC
1
MOR
1
固定サイクルで穴あけ加工軸はいつもZ軸
G71, 72の最後で荒削りの仕上げ加工しない
6202
単一型旋削サイクルモード中移動指令が無いブロックで旋削サ
イクルを行う
G73で工具が逃げる量
6210
*㎛
G83でまた切削を始める量
6211
*㎛
((G76, G92)ネジ切り時の面取り量
6212
0.1pitch
((G76, G92)ネジ切り時の面取り角度.
6213
deg
(G71, G72)荒削り加工サイクル時の逃げ量
6215
*㎛
(G71, G72)荒削り加工サイクル時の面取り量
6216
*㎛
(G74, G75)サイクル時の逃げ量
6217
*㎛
G76ネジ加工時の最小切削量
6218
*㎛
G76ネジ加工時のアンダーカット長
6219
*㎛
G76ネジ加工時仕上げサイクル反復数
6220
*㎛
(G71,G72)荒削りサイクル時の1回あたりの切削量
6221
*㎛
G73サイクルのX軸方向の荒削り量
6222
*㎛
G73サイクルのZ方向の荒削り量
6223
*㎛
G73サイクルの分割回数
6224
G76ねじ加工時のねじ山の角度
6225
穴あけ加工固定サイクル完了後Z軸インポジション量
6226
G76, G87で工具が逃げる方向の軸番号
6240
7-128
deg
3. 機能別パラメータリスト
3.1 パラメータリスト 1 (ユーザ用)
パラメータの内容
番号
内容
*印は IS-B単位
5. 工具補正
工具長補正軸はいつもZ軸
6000
LXY
0
G45~G48で円弧指令も有効
PC1
1
G45~G48でオフセット番号は“D”で指定
PNH
0
工具径補正するとき“D”を使用
OFH
0
オフセット量を変更する場合つぎの(H、D、T)から
EVO
0
工具長(位置)補正はリセットで削除される
LVK
0
工具オフセット番号はTコードの下1桁で
LDI
1
CNI
1
工具径補正をするときに干渉チェックをしない
6001
移動方向とオフセット方向が90~270度
CNC
工具径補正のスタートアップ方法はBタイプ
CSU
1
ドライラン時の工具長補正量にパラメータ 6233番の値を加算して補正
DRZ
1
パラメータ6001番 LGN=0の場合のオフセット番号0指令時に磨
耗、形状すべてキャンセル
LGC
1
磨耗オフセット番号と形状オフセット番号が共通
LGN
0
磨耗オフセットはワーク座標系の移動により補正
LWT
1
形状オフセットはワーク座標系の移動により補正
LGT
0
ORC
0
円弧と円弧がつながる時、外的補正の場合、各角度が1度内の
時は直線成分を生成しない
T01
1
工具補正取消しを円弧補間後に指令してもアラーム121を発
生しない
K40
1
工具補正データの個数指定
OD2
工具補正データの個数指定
OD1
工具位置補正量を直径値で設定する
6002
旋盤の工具補正でX軸磨耗補正制限値を設定
6010
0の場合制限無
旋盤の工具補正でY軸磨耗補正制限値を設定
6011
0の場合制限無
旋盤の工具補正でZ軸磨耗補正制限値を設定
6012
0の場合制限無
旋盤の工具補正でR軸磨耗補正制限値を設定
6013
0の場合制限無
ドライラン時のZ軸オフセット機能のオフセット量
6021
*㎛
G28,G30実行時に工具長補正(旋盤:工具位置補正)の場合自動
的にキャンセルする
6202
OAC
자동개시 시 D32 공구보정 취소여부를 설정한다.
6408
NSS
7-129
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
6. プログラム
プログラム入力時にCR信号で入力を開始
0000
%OF
1
ARC
1
S0F
0
M00/M01の実行時タイマクリア
TMR
1
工具径補正時、交点ごとにシングルブロックストップ
SBO
1
固定サイクル時、各サイクルごとにシングルブロックストップ
SBC
1
マクロ文でシングルブロックストップ
SBM
1
SCL
1
MIR
1
TDR
1
面取り、コーナR指定時に“C”, “R”を使用
プログラミング方式は、FANUC OT/OM方式
0011
各軸に対するスケーリング有効
0012
各軸に対するミラーイメージ設定有効
シーケンス番号自動挿入機能時、シーケンス番号の インクレメンタル値
0032
ネジ切り時、ドライランを有効にする
1400
G00実行時ドライラン送り速度有効
RDR
1
5 MB以上のプログラムの編集を禁止する
2201
LSP
1
先読みプログラムブロック数を100個に
2202
MBL
1
Gコード B体系
2400
GSB
1
Gコード C体系
GSC
1
いつも秒単位(S)でドウェル
DWL
0
小数点入力計算機方式で行います
DPI
1
円弧加工時、終点が正しくなくても許容する量
2410
サイクルスタート時、プログラムの先頭から開始
5200
PTS
1
スケーリングの倍率単位は0.001倍
6400
SCR
1
RIN
0
ASN
1
XSC
1
座標回転角度指令はいつもアブソリュート指令で
シーケンス番号自動挿入機能設定
6401
スケーリングの倍率をI、J、Kで指令
*㎛
スケーリング倍率指令
6410
座標回転角度指令
6411
各軸のスケーリングの倍率指定
6421
内側円弧切削速度変更に対する最小減速比
6610
%
内側コーナ一部自動オーバライドの内側判定角度
6611
2deg
内側コーナオーバライド量
6612
%
内側コーナ一部自動オーバライド終点の減速距離、動作エリアLE設定
6613
*㎛
内側コーナ自動オーバライド始点の減速距離、動作エリアLE設定
6614
*㎛
G60方向とアプローチ量
6820
*㎛
7-130
0.001/0.000001
0.001 deg
0.001/0.000001
3. 機能別パラメータリスト
3.1 パラメータリスト 1 (ユーザ用)
パラメータの内容
番号
内容
*印は IS-B単位
7. モーダル情報
リセットによりモーダル情報をクリア
2401
NCM
0
電源オン時、G18(ZX平面)状態
G18
1
電源オン時、G90(アブソリュート指令 )状態
G90
1
電源オン時、G01(直線補間)状態
G01
1
電源オン時、G95(毎回転送り)状態
G95
1
5605
IOR
0
マクロ変数#698のプログラムのシーケンス番号からリスタート
6402
NSR
1
Bコードでマクロを呼び出す(O9028)
7000
リセットで主軸位置決定機能モードを取消し
8. マクロ文
BCS
1
Sコードでマクロを呼び出す(O9029)
SCS
1
Tコードでマクロを呼び出す(O9000)
TCS
1
Mコードによるプログラム呼び出しでO9006~O9009をマクロ呼
び出し
MCM
1
MEF
1
MEN
1
プログラム番号9010 呼び出し用Gコード番号.
≀
プログラム番号9019 呼び出し用Gコード番号
7050
≀
7059
プログラム番号9001 呼び出し用Mコード番号.
≀
プログラム番号9009 呼び出し用Mコード番号
7071
≀
7079
マクロデータ有効桁数 指定して表示
8010
マクロデータ有効桁数は12桁
7-131
第7章 パラメータ
3.2 パラメータリスト 2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
1. 軸制御
2文字軸名の使用を指定
1000
EEA
ストロークチェックと自動原点復帰の機械座標系軸を使用しない
1000
ROS
軸を使用しない
1005
RMB
1
PLC
1
ZNG
1
PLCで軸を制御
各軸のマシンロックを有効にする
1
(直線軸/回転軸)
各軸の名称を定める
1020
A〜C, U〜Z
基準軸を定める
1031
1〜5
軸と基本座標系との関係を定める
1032
0〜7
極座標補間をするときの直線軸を定める
1034
1〜8
極座標補間をするときの回転軸を定める
1034
1〜8
角度軸制御時のX軸の角度を設定する
1040
0.001deg
角度軸制御が可能
1041
AGL
1
軸の最小移動単位を定める
1814
ISF
0 (IS-B)
軸の最小移動単位を定める
ISR
0
マグネットスケールを使用
MAG
各軸移動指令を直径指令で行う
1823
軸の移動方向を定める
2020
旋盤回転あたりの送り用ポジションコーダ2000 PPRを使用
5603
P20
1
2軸ヘリカル補間を指令
6450
HA2
1
HA3
1
RV1
1
回転軸指定時、-方向に移動.
RVM
1
回転軸指定時、絶対座標を回転軸表示
RAB
1
RV-
1
回転軸指定時、いつも+方向に移動.
RV+
1
回転軸を第2原点にG30で移動するとき最短距離で移動
2RS
1
回転軸の停止時、最短距離で移動
RVS
1
3軸ヘリカル補間を指令(HA2も1にします)
DIA
0〜13
2. 回転軸制御
回転軸指定時、1回転して原点復帰
1000
回転軸指定時、いつも-方向に移動.
1004
極座標補間の時回転軸を指定
1035
回転軸1回転当りの移動量を設定
1260
回転軸を指定
1814
0 →1, 1 →0に変更するとモータ軸の回転方向が反対
7-132
0〜13
*㎛
REV
1
MRW
1
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
3. サーボ設定
サーボレディチェック時サーボエンネーブル 信号チェック有効
1000
NCE
フィードストップ機能有効
1400
FST
0
サーボ軸の番号
1800
モータ1回転あたりのエンコーダパルス数
1801
PPR
モータ1回転あたりの機械の移動距離
1802
*㎛
ポジションループゲイン
1803
0.01/s
ポジションエラーリミット(STOP)
1804
検出単位(pulse)
ポジションエラーリミット((MOVE)
1805
検出単位(pulse)
ポジションエラーリミット(SERVO OFF)
1806
検出単位(pulse)
ゲインコンスタンス
1807
mv/1000RPM
インポジション幅
1808
検出単位(pulse)
サーボオフ遅延時間
1812
Vレディ信号はB接点
1816
0〜8
10㎳ec
VRA
0
サーボアラーム信号はA接点
ALB
0
PREADY-OFF時もサーボチェック
ACP
0
エンコーダパルス設定値100倍機能 有効
EMH
1
EPS8アナログ電圧出力機能 有効
AVO
1
サーボオフ中フォローアップ 有効
FVF
1
パラメータ1802のムービングマルチプライ設定単位を10倍に
M10
1
UR5
1
パラメータ1816の意味を変える.
ムービングマルチプライ設定単位を1000倍に
UR4
1
パラメータ1816の意味を変える.
ムービングマルチプライ設定単位を100倍に
UR2
1
UR1
1
UR0
1
GC2
1
GC1
1
パラメータ1810の意味を変える
1816 M10,1817 UR2によって10倍,100倍に.
Cs軸 有効 (UR0 = 1 のときだけ有効)
1817
1817
主軸I/Fをサーボ軸として使用
パラメータ1807番 GAIN CONSTANT 設定単位は 100mv.
1819
パラメータ1807番 GAIN CONSTANT 設定単位は 10mv.
フィードフォワードゲイン定数を指定
1821
ドリフト量 (パラメータ1823番 <ADF>=0 の時)
1822
自動的にドリフト補正
1823
velo(0.31mv)
ADF
1
自動的にゲイン補正をする
AUG
1
非常停止スイッチで原点位置を失う
ERC
1
パラメータ1801番 エンコーダタイプの設定単位を10倍
P10
1
パラメータ1808番 インポジション幅の設定単位を10倍
I10
1
エンコーダ0パルス幅
1824
検出単位(pulse)
高速位置決めを実行する位置偏差の最大値
1825
検出単位(pulse)
電源投入時 F/B パルスの発生チェックするデータ
1826
検出単位(pulse)
7-133
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
フィードストップ位置偏差量
1832
検出単位(pulse)
油圧サーボの最小速度クランプ制御値
1833
検出単位(pulse)
GコードG64. 1でinplev el=6のときG00のインポジション
チェック値
1834
検出単位(pulse)
パルスカウントミスのインターバル許容値
5430
検出単位(pulse)
パルスカウントミスのポジション許容値
5431
検出単位(pulse)
加減速とサーボの遅延を計算して信号出力
6901
PCM
1
パラメータ1810番の単位は最小移動単位(デュアルポジション
機能使用時は使用不可能)
8015
RSM
1
アブソリュ-トエンコーダと通信中にモータが動くとアラーム
(17200〜17215)を発生
1058
ABA
1
YASKAWAのアブソリュ-トエンコーダの多回転データが0のとき
多回転データを1とみなす
1815
MYA
1
アブソリュ-トエンコーダを使用
1817
UR3
1
アブソリュ-トエンコーダのメーカを軸毎に指定 (6409 AT=1)
1818
4. アブソリュートエンコーダ
AB7
(軸毎に異るメーカ)
アブソリュ-トエンコーダのメーカを軸毎に指定 (6409 AT=1)
AB6
(軸毎に異るメーカ)
アブソリュ-トエンコーダのメーカを軸毎に指定 (6409 AT=1)
AB5
(軸毎に異るメーカ)
アブソリュ-トエンコーダの原点位置誤差許容値の範囲
2011
0〜100
アブソリュ-トエンコーダと通信ポートはCOM2
6400
AB2
アブソリュ-トエンコーダのメーカを指定 (6409 AT=0)
6404
AM3
(各軸同じメーカ)
アブソリュ-トエンコーダのメーカを指定 (6409 AT=0)
AM2
(各軸同じメーカ)
アブソリュ-トエンコーダのメーカを指定 (6409 AT=0)
AM1
(各軸同じメーカ)
1
2つのメーカのアブソリュ-トエンコーダを混ぜて使う
6409
AT2
1
アブソリュ-トエンコーダのCOMポート設定、6400 <AB2>と組合わせ
6452
AB3
1
7-134
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
5. 簡易同期制御
簡易同期制御でミラーイメージを0Nの時、マスター軸とス
レーブ軸を反対方向に動かす
0012
SMR
1
簡易同期制御時、グリッドシフトも同期する
1817
UR6
1
同期制御のマスター軸を設定
7470
ツインテーブル制御機能有効
7480
1
TWT
1
TPN
1
TDC
1
同期運転時、マスター軸とスレーブ軸の位置偏差量の差が小さ
くなるように制御
PDC
1
同期運転時、マスター軸とスレーブ軸のトルクの差をチェック
し、パラメータ7486番の限界値を越える場合にアラームを表示
TDA
1
同期運転時、マスター軸とスレーブ軸の位置偏差量の差をチェック
し、パラメータ7485番の限界値を越える場合にアラームを表示
PDA
1
同期運転時のトルクの差によるフィードバック制御量の部号を
反転する
同期運転時、マスター軸とスレーブ軸のトルクの差が小さくな
るように制御
7480
各スレーブ軸の位置偏差制御比例ゲインを設定
7481
GAIN 1 = 256
各スレーブ軸の位置偏差制御積分ゲインを設定
7482
GAIN 1 = 256
各スレーブ軸のトルク制御比例ゲインを設定
7483
GAIN 1 = 256
各スレーブ軸のトルク制御積分ゲインを設定
7484
GAIN 1 = 256
各スレーブ軸の位置偏差の限界値を設定
7485
検出単位(pulse)
各スレーブ軸のトルク差の限界値を設定
7486
4.88mV
各スレーブ軸間のトルク差を減少させるためのトルク値を設定
7487
4.88mV
6. シリアルディジタルインターフェイス
メカトロリンクサーボのアドレス番号
1864
メカトロリンクサーボドライバに
YASKAWA MECHATROLINK ΣⅢを指定
1865
メカトロリンクサーボドライバに
YASKAWA MECHATROLINK ΣⅤを指定.
第2,第3 スピンドルのアナログ出力を使用
9030
SG3
1
SG5
1
SPA
1
メカトロリンクアブソリュ-トエンコーダを使用
MBA
1
メカトロリンク機能を使用
MTL
1
サーボ0Nするタイミングを送らせる時間を設定
7-135
9031
msec
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
7. 軸送り
リターン機能で軸を無視
0012
AXC
1
PLCで位置設定移動をするときに、移動範囲のチェックを取消す
LCC
1
PLCで位置設定移動をするときに、各軸の速度指定を4 Byteで行う
SPP
1
PLCで位置設定移動をするときに、設定値を1/10にする
F10
1
PLC軸があるときにPLC軸を実速度計算から除外
1004
AFC
1
オーバライド型JOG送り機能で、G13/G14の代りに各PLC軸速度指
定アドレス 第1軸(G68,G69)、第2軸(G78,G79)、第3軸(G88,G89)に
オーバライド値を出力すると、各軸別々にオーバライドを実行
1042
EAJ
1
位置決定方式(直線補間型/各軸ごと)
1400
LRP
1/0
補間後直線加減速機能 有効
LAI
1
円弧半径によるフィードクランプ機能 有効
COR
1
手動早送り時速度がパラメータ設定値の1/2
1401
MR2
1
早送りフィードオーバライド0で停止させる
1402
RF0
1
早送りフィードオーバライド 有効
ROV
1
早送り加減速のタイプは指数型
RAT
1
フィードオーバライド型JOG送りを使用
JF2
1
任意角の自動面取り、自動コーナRにコンマがなくても使用可能
CRD
1
ベル型加減速方式を選択
RBL
1
手動運転で早送り-送りの変換(G6.7)を円滑に行う
SMC
1
JVR
1
RDA
1
A1C
1
A2C
1
手動運転早送りでオーバライド型で速度変更が可能
1403
早送り速度選択個数を4個(RT0〜RT3)にする
指定速度を基準に加減速係数を計算
1404
早送りの加減速時定数とFLを原点復帰モードの時だけ別に設定
切削送り速度の最高速度を240m/minに変更
1405
ハンドル運転時の各軸のクランプ速度を指定
1413
*mm/min
MPGの送り1の倍率を設定
1414
設定単位
MPGの送り2の倍率を設定
1415
設定単位
MPGの送り3の倍率を設定
1416
設定単位
各軸の最高切削速度を設定
1422
*10mm/min
最大早送り速度を軸毎に設定
1423
*10mm/min
早送り速度 RT0を設定
1500
*10mm/min
早送り速度 RT1を設定
1501
*10mm/min
早送り速度 RT2を設定
1502
*10mm/min
ジョグ移動量-段階1を設定
≀
ジョグ移動量-段階21を設定
1503
≀
1523
*mm/min
ジョグ早送り速度を設定
1524
*mm/min
早送り速度 RT3を設定
1525
*10mm/min
ブロックオーバラップ機能を使用
1601
7-136
F10
OVR
1
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
早送り 加減速時定数を設定
1620
msec
早送り FL速度を設定
1621
*mm/min
切削送り 加減速時定数を設定
1622
msec
切削送り FL速度を設定
1623
*mm/min
ジョグ送り 加減速時定数を設定
1624
msec
ジョグ送り FL速度を設定
1625
*mm/min
ネジ切り送り 加減速時定数を設定
1626
msec
ネジ切り送り FL速度を設定
1627
*mm/min
オシレーション機能時 加減速時定数を設定
1628
msec
オシレーション機能時 FL速度を設定
1629
*mm/min
マーキング機能時 加減速時定数を設定
1630
msec
マーキング機能時 FL速度を設定
1631
*mm/min
早送りベル型 加減速時定数を設定を設定
1632
msec
早送りベル型 FL速度を設定
1633
*mm/min
高速位置決定制御を使用
1814
HSP
1
小数点の無いフィードが指令された時、1mm/min単位で認識
2400
DPF
1
G32が指令された状態でQアドレスに対する小数点処理をする
DPQ
1
ネジ切り送りの開始角度を 0.001度単位で指定
SCA
1
周速一定制御の計算をする軸番号を指定
5640
ここで指定された値よりも小さいR値でG02/G03を実行時に、
F158.0を0Nし指令が終わるとOFFにする
6140
XY方向別速度指令機能を有効にする
6407
FVS
1
自動運転開始時のG51の設定を取消す
6408
NSD
1
座標値設定特殊機能を有効にする
6409
PSS
1
NC起動時に絶対座標値を0にする
ANS
1
自動運転開始時のフィード自動初期設定をしない
FSC
1
mm
マーキング時、円弧半径による送り速度クランプ処理で使用す
る許容誤差量を設定
6617
ハンドル運転でステップ機能を使用
8000
STF
1
G2.5 <FDOR3>が1の時、フィードオーバライド値を指令値の3倍にする
8013
OR3
1
APS
1
各軸毎に座表系を指定
7-137
*mm
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
8. 原点復帰
G28とストロークチェック時は直線軸タイプ
1000
ROS
0
減速信号は1から0に変わる
1005
DCI
0
手動原点復帰時ワーク座標系をいつのプリセット
PLZ
1
G28は早送りで復帰
ALZ
0
原点復帰完了時およびG92座標設定実行時、相対座標を絶対座
標と同じ値に設定
1041
RPS
1
手動原点復帰時早送り速度が1/4 有効
1401
RP4
0
原点復帰時の早送り速度を設定
1526
*10mm/min
軸毎に原点復帰モード時の早送り加減速定数を設定.
1634
msec
軸毎に原点復帰モード時の早送り時定数を設定
1635
msec
原点復帰時の低速速度を設定
1809
*mm, deg/min
原点復帰時のグリッドシフト量を設定
1810
検出単位
原点復帰方向を+にする
1814
原点復帰減速後Zパルスで移動方向を反対に変る
RDI
0
RET
1
原点復帰シフト機能 有効
1816
MPS
1
原点ドッグの無い原点復帰機能で最短距離選択機能を有効
1818
MDR
1
NDR
1
原点ドッグの無い原点復帰機能を有効
スケール原点復帰方式を使用
1819
LSR
1
ドッグ信号を使用せずに原点復帰を行う
1823
NDC
1
ソフトウェア操作盤で手動原点復帰送り方向を指令するMDIパ
ネルの数字キー番号を軸毎に設定
2021
全軸の原点復帰完了時に、PLC軸を除外する
8012
EPL
1
1818
SDR
1
DPF
1
0~13
9. デュアルポジションフィードバック機能
スケール信号入力を反転
デュアルポジションフィードバック機能 有効
フルクローズドループのエンコーダ入力ポートを制御軸番号で設定
1870
0~16
クローズドループに使用する別置き検出機の信号をセミクロー
ズドループの検出機の単位に変換する比率を分子(1871)、분모
(1872)に設定
1871
誤差補正の1次遅延系の時定数を設定
1873
mm
補正無視幅を設定
1874
検出単位
フルクローズドループのリファレンスカウンタ値を軸毎に設定
1875
検出単位
フルクローズドループの原点グリッドシフト量を軸毎に設定
1876
検出単位
1872
10. オシレ-ション機能
オシレ-ション機能 有効
1041
オシレ-ション加減速はサインカーブ型
7-138
OSL
1
OSS
1
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
11. ハンドルインタラプト機能
自動運転モードで運転状態が解除状態になる時ハンドルインタ
ラプトオフセットをクリアする
8015
HIC
7120
TDH
1
12. 工具軸(直角)方向ハンドルフィード機能
工具軸(直角)方向ハンドルフィードモードを指定
工具軸(直角)方向ハンドルフィードモードで複数のMPGを使用
HMU
第2回転軸の座標値指定方法はパラメータ7126番の設定値
3D2
第1回転軸の座標値指定方法はパラメータ7125番の設定値
3D1
4軸構成(第2回転座標値はいつも0).
CXC
工具軸の指定はX軸
TLX
工具軸(直角)方向ハンドルフィードモードの軸構成を指定
7121
工具軸方向ハンドルフィード軸(Z軸)を指定
7122
工具軸(直角)方向ハンドルフィードのX軸を指定
7123
工具軸(直角)方向ハンドルフィードのY軸を指定
7124
工具軸(直角)方向ハンドルフィードモードの第1回転軸の座標値を指定
7125
工具軸(直角)方向ハンドルフィードモードの第2回転軸の座標値を指定
7126
1~4
13. 高速加工機能
補間前直線型加減速の加速度を決定するパラメータ
最高速度を設定
8400
10mm/min
補間前直線型加減速の加速度を決定するパラメータ
最高速度までの時間を設定
8401
msec
オーバラップ機能 有効
8402
OVP
1
エッジ停止ブロックでインポジションチェックを実行
INP
1
最大速度クランプを無効
bit4
1
分配周期を設定
DT2
分配周期を設定
DT1
分配周期を設定
DT0
加速度クランプ機能 有効
8403
HS6
1
加速度クランプ機能による事前加減速機能 有効
HS4
1
微笑ブロックによる速度クランプ 有効
HS3
1
経路自動修正機能 有効
HS2
1
微笑ブロック消去機能 有効
HS1
1
補間前ベル型化減速 有効
HS0
1
高速/高精密加工時の補間前ベル型加減速の加速度を決定する
パラメータ 最高速度までの時間中、直線部時間の設定
8404
msec
高速/高精密加工時の補間前ベル型加減速の加速度を決定する
パラメータ 最高速度までの時間中、曲線部時間の設定
8405
msec
高速加工中G00にG01の加減速処理をする
8406
コーナでの各軸毎速度変化量制限値を設定
C01
8410
7-139
1
mm/min
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
各軸の許容加速度用時定数 最高速度(パラメータ1422番)に到
達する時間を設定
8411
msec
無視する速度変化を比率で設定
8412
%
エリア2でのオーバドライブ値
8415
%
エリア3でのオーバドライブ値
8416
%
エリア4でのオーバドライブ値
8417
%
高速高精密加工モード(G61.1)中の補間後、直線加減速時定数を設定
8418
msec
高速高精密加工モード(G61.1)中のコーナ角度の変化量がこの
値を越えると減速停止
8419
deg
パラメータ8402番の<INP>=1の場合、高速/高精密加工モード
(G61.1)中に減速停止時、インポジションチェックするインポ
ジションチェックするインポジション幅の設定
8420
フィードフォワードゲイン1定数の設定
8422
フィードフォワードゲイン2定数の設定
8423
ロウパスフィルタの時間
8424
ポジショントレランス定数の設定
8425
微笑ブロック消去用経路許容誤差を設定
8426
経路自動修正用許容경誤差を設定
8427
高速加工中、G00にG01加減速処理を適用するG00の移動距離
8430
検出単位(pulse)
14. ハードウェア構成
アナログ出力2(PNC2 #2) 有効
5605
アナログ出力1(PNC2 #1) 有効
AN2
1
AN1
1
ロード1の負荷率100%の電圧(1/100)を設定
5644
0〜1000
ロード1の電圧入力番号を設定
5645
0〜11
ロード2の負荷率100%の電圧(1/100)を設定
5656
0〜1000
ロード2の電圧入力番号を設定
5647
0〜11
サーボ波形でアナログ入力電圧を使用
6405
SWR
1
I/O基板ショートチェック時、アラーム表示をしない
6409
CRS
1
第2MPGをEPS8 2番目のMPGコネクタに接続
8013
MP2
1
EPS8 RAD アナログ入力を設定
9010
EP4
1
スピンドル軸を使用
SPS
0
G43.5,G43.6でEPS8から出力される電圧が+/-反対
RPS
1
2番目のEPS8のアナログ入力を設定
ESB
1
DIO8基板 NO.4を使用
IO4
1
DIO8基板 NO.3を使用
IO3
1
DIO8基板 NO.2を使用
IO2
1
DIO8基板 NO.1を使用
IO1
1
AVR
1
EPS8アナログ入力(NO.1)の符合を反転
9011
7-140
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
RAD入力電圧を瞬間電圧にする
RDM
1
RIO1,RIO2,RADの状態をPLC R506〜R508に出力
RIS
1
R12
1
RIO1基板 NO.1を使用
R11
1
RIO1基板を自動認識する
R1A
1
R28
1
RIO2基板 NO.7を使用
R27
1
RIO2基板 NO.6を使用
R26
1
RIO2基板 NO.5を使用
R25
1
RIO2基板 NO.4を使用
R24
1
RIO2基板 NO.3を使用
R23
1
RIO2基板 NO.2を使用
R22
1
RIO2基板 NO.1を使用
R21
1
AD8
1
アナログ電圧入力 CH7を使用.
AD7
1
アナログ電圧入力 CH6を使用.
AD6
1
アナログ電圧入力 CH5を使用.
AD5
1
アナログ電圧入力 CH4を使用.
AD4
1
アナログ電圧入力 CH3を使用.
AD3
1
アナログ電圧入力 CH2を使用.
AD2
1
アナログ電圧入力 CH1を使用.
AD1
1
RIO1基板 NO.2を使用
9011
RIO2基板 NO.8を使用
9012
アナログ電圧入力 CH8を使用
9013
RIO2基板 NO.12を使用.
R2C
1
RIO2基板 NO.11を使用
9105
R2B
1
RIO2基板 NO.10を使用
R2A
1
RIO2基板 NO.9を使用
R29
1
1
AnyWire(UniWire)を使用
9016
WIR
サーボ波形で電圧値を測定するためのパラメータ(CH 8)
9017
WA8
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 7)
WA7
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 6)
WA6
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 5)
WA5
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 4)
WA4
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 3)
WA3
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 2)
WA2
選択時 1
サーボ波形で電圧値を測定するためのパラメータ(CH 1)
WA1
選択時 1
ES8
選択時 1
EPS8基板の7ch D/A出力を使用.
ES7
選択時 1
EPS8基板の6ch D/A出力を使用.
ES6
選択時 1
EPS8基板の5ch D/A出力を使用.
ES5
選択時 1
EPS8基板の4ch D/A出力を使用..
ES4
選択時 1
EPS8基板の3ch D/A출력을 사용한다.
ES3
選択時 1
EPS8基板の8ch D/A出力を使用.
9020
7-141
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
15. システム構成
ディジタルリードアウト 有効
1000
DR0
1
各軸の入力単位を10倍
1004
IRP
1
NCのインタラプト周期に対するサンプリング周期を設定
1044
LAN タイプ DNC運転をする
1817
エレクトロニックギアのギア比の分子(A)を設定
1828
エレクトロニックギアのギア比の分母(B)を設定
1829
主軸負荷の表示を機械操作盤で行う
2001
DLO
1
シーケンス番号検索中には自動運転中信号をONにする
2000
OPS
1
STR
1
プログラム登録するとき自動運転中信号を出力
プログラムを検索するとき番号の前2桁
UR7
2049
1(4軸目)
-127〜127
16. I/O機器制御
外部入力する時接続するインターフェイス番号
0022
0/1
外部出力する時接続するインターフェイス番号
0023
0/1
サイクルスタート信号でプログラム登録をする
2200
プログラムをパンチする時、1つだけ出力
プログラムを登録するときは1つだけ登録
RDS
11
PAL
0
RAL
FDU/USUとの通信を(COM2 / COM1)にする
6400
FDUのファイル拡張子がないものとする
FD2
0
COM1/COM2
FPS
1
FDUを使用
6401
FDD
1
USBメモリアクセス制御プログラム制御メニュー表示
6406
USB
1
CFメモリ(D-DRIVE)を使用
6408
CFD
1
UUS
1
外部USB装置(USU)を使用
シリアル通信NC制御機能使用時のボーレートを指定
6451
TB1
シリアル通信NC制御機能使用時のボーレートを指
TB0
シリアル通信NC制御機能のCOMポートはCOM2
OTC
1
シリアル通信NC制御機能を使用
PT2
1
7000
PRT
1
6203
TP2
1
TP3
1
PAD
1
TPN
1
DPRINT マクロ出力機能でスペースを出力
17. タッチパネル
タッチパネルの通信タイプ設定 新しいタイプ(2010年10月以降出荷分)
タッチパネルの通信タイプ設定 boscotec社のタッチパネル使用
キーパッドを表示/使用
6405
タッチパネルを使用
7-142
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
18. オペレータパネルの設定
フィードオーバライドを画面上で実施
7603
OP7
0
MPGの移動量を画面上で実施
OP6
0
MPG軸の移動方向を画面上で実施
OP5
0
ジョグ送り/早送りの選択を画面上で実施
OP4
0
早送り速度選択を画面上で実施
OP3
0
ジョグ送り速度選択を画面上で実施
OP2
0
手動送り軸の選択を画面上で実施
OP1
0
モード選択を画面上で実施
OP0
フィードオーバライドキャンセルを画面上で実施
7604
OP8
0
プログラム画面にソフトウェア操作盤を表示
OP9
0
プロテクトキーG05.4〜G05.7信号に変化があるとき画面を変える
OPD
1
主軸速度画面にオーバライドカーソルを表示
OPC
0
19. MST機能
第2補助機能の名称を定義
1030
1ブロックに複数Mコード指令可能 (最大 4個)
2001
MMC
1
第2補助機能で“-“を使用可能
2003
BSN
1
Tコードで“-“を使用可能
2003
TSN
1
Sコードで“-“を使用可能
SSN
1
Mコードで“-“を使用可能
MSN
1
Mコードの許容桁数の設定
2030
1〜8
Sコードの許容桁数の設定
2031
1〜8
Tコードの許容桁数の設定
2032
1〜8
第2補助機能の許容桁数の設定
2033
1〜8
ワークの個数をカウントアップするMコードの設定
2426
0〜97
G68/G69機能を使用時の2個の工具台の距離
2900
主軸位置決定機能Mコードによる位置決定の移動方向
5605
IDM
*㎛
-/+
主軸のオリエンテーションを指令するMコード
5680
6〜97
主軸位置決定モードを解除して主軸速度制御モードで移動させ
るためのMコード
5681
6〜97
Mコードによる主軸位置決定のMコードを設定
5682
6〜92
Mコードによる主軸位置決定時の基本回転角度
5683
deg
TNV40でTコード単独で工具交換をする
6200
V40
1
穴あけ加工固定サイクル中M19,M03,M04を出力する前にM05を出
力しない
6201
MN5
1
第2補助データの値を自動運転プログラム画面に表示
8012
SCD
1
7-143
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
20. 機械精度補正
バックラシュ補正量
1811
*㎛
ピッチ誤差補正間隔
1813
*㎛
バックラシュ加速機能サブマクロ制御の時、加速停止のパルス
カウント量を100倍にする
1819
BTM
1
バックラシュ加速機能サブマクロ制御の時、加速停止のパルス
カウント量を10倍にする
RAS
1
バックラシュ加速機能サブマクロ制御の時、加速停止時間を
10倍にする
RAT
1
軸ごとのバックラシュ補正量の最大値
1827
*㎛
バックラシュ加速機能サブマクロ制御の時、設定された値によ
り2msecごとに増加/減少(-値を設定時)
1859
2msec
バックラシュ加速機能の加速量
1860
3.05mV
バックラシュ加速機能の加速時間
1861
分配周期(10ms)
バックラシュ加速機能の加速停止する移動量
1862
検出単位
バックラシュ加速機能の加速量(移動方向 +→-)
1863
3.05mV
原点のピッチ誤差補正点の番号
5420
0〜639
一番-側のピッチ誤差補正点の番号
5421
0〜639
一番+側のピッチ誤差補正点の番号
5422
0〜639
速度指令電圧が+の場合の主軸回転方向はCW
5603
主軸CW回転時のポジションコーダの発生パルスの方向はCW
MDR
0
PDR
0
TMB
1
21. 自動工具測定
オフセット測定値直接入力B機能有効
6002
<TMB>=1のとき測定基準位置でセンサの接触面までの距離を設定
タッチセンサ +X
6015
タッチセンサ -X
6016
タッチセンサ +Z
6017
タッチセンサ -Z
6018
長さ補正入力時PLC
面の差の設定
I/Fを使用する場合の工具の端とワーク表
G37に高速測定位置到達信号を使用
6019
7300
工具測定量を現在のオフセット量に加算
0
AMH
1
MDC
1
工具測定1 (G37.1)実行時の送り速度
7311
*mm/min
工具測定2 (G37.2)実行時の送り速度
7312
*mm/min
工具測定3 (G37.3)行時の送り速度
7313
*mm/min
工具測定1のγ値
7321
㎛
工具測定2のγ値
7322
㎛
工具測定3のγ値
7323
*0.01mm
工具測定1のε値
7331
㎛
工具測定2のε値
7332
㎛
7-144
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
工具測定3のε値
7333
G37.1指令に対して高速信号(スキップ)が有効
7600
1A1
1
2A1
1
7601
3A1
1
7400
ABT
G37.2指令に対して高速信号(スキップ)が有効
G37.3指令に対して高速信号(スキップ)が有効
*0.01mm
22. 工具寿命/工具交換
工具交換方式Aで復帰工具番号が現在使用中のグループと同じ
グループでないときにアラーム
工具寿命管理工具外工具が選択されているときに工具スキップ
信号が入力された場合その信号を無視
SNG
工具交換リセット信号が入力されているとき
全てのグループの実行データをクリア
PAG
登録されている
1
1
1
工具寿命を回数で指定
LTM
1
工具スキップでグループ番号を入力
SIG
1
登録できる工具寿命グループ数と1グループあたり登録可能な
工具数の組み合わせを設定
GS1
GS2
7401
工具交換方式の設定
工具寿命管理無視番号
CT2
CT1
7440
0
0
1
1
A B C D
0
1
0
1
0〜9999
23. アラームキャンセル設定
サーボアラーム キャンセル
1815
SAC
1
加熱アラーム キャンセル
OHC
1
V レディON/OFFチェック キャンセル
VOC
1
エンコーダフィードバックカウンタチェック キャンセル
F1C
1
サーボオフエラーチェック キャンセル
SOC
1
P レディオフ時アラームキャンセル
1816
ACP
1
インタラプトシステムエラー 14004,14007 キャンセル
1817
UR7
1(1軸目)
インタラプトシステムエラー 13000〜 キャンセル
1817
UR7
1(5軸目)
ポジションコーダ断線チェック キャンセル
5603
PDC
1
サーマルアラームチェック キャンセル
8000
TAC
1
12C
1
8013
SLR
1
1005
PND
1
1400
F05
1
1404
TV2
12V ダウンアラームチェック キャンセル(SENTROL0iの設定)
ソフトオーバリミットアラームを自動リセット
24. 画面表示設定
画面上に位置表示をしない
送り速度オーバライド速度画面で増減率選択
TV, AV 表示方式選択
TV, AV 表示方式選択
TV1
サーボ波形表示が有効
2001
SWD
1
F7ソフトキーに操作盤スイッチ(CLNT CAN)表示
2004
OP7
0
OP6
0
F6ソフトキーに操作盤スイッチ(CLNT MAN)表示
7-145
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
F5ソフトキーに操作盤スイッチ(M01)表示
OP5
0
F4ソフトキーに操作盤スイッチ(SNG BLOK)表示
OP4
0
F3ソフトキーに操作盤スイッチ(OPT SKIP)表示
OP3
0
F2ソフトキーに操作盤スイッチ(DRY RUN)表示
OP2
0
OP1
0
F1ソフトキーに操作盤スイッチ(CHIP CONV)表示
2004
ジョグフィードのバー表示ステップ数最大値設定
総合稼動時間の修正可能
2034
2201
0~21
MRH
1
編集モードプログラム一覧表に削除メニュー表示をしない
DEL
1
電源オン時のプログラム画面は一覧表を表示
PDR
1
MSD
0
絶対座標値位置表示に工具長の補正量を含まずに表示
DTL
1
自動運転プログラム表示を小さい文字で表示
HCH
1
サイクルタイム表示(秒単位)
2202
工具経路表示色の設定
2203
軸パラメータを表示する個数
2210
1~8
位置表示をする軸数
2211
1~8
DNCモードでグラフィックメニューの表示
2200
DGD
1
自動運転画面でS指定数の表示をオーバーライドを含めた値で表示
5605
DSO
1
工具経路表示時オフセット量を引いて表示
6002
OFE
1
自動運転モードでグラフィック画面のままで手動運転、ハンドル運
転になる
6202
TPK
1
グラフィックでワーク座標系が変ると描画画面を消去
WCR
1
パラメータ1032番で X, Y, Z 基準軸になった軸をグラフィック
で第1、第2,第3軸として描く
TPR
1
工具経路グラフィック表示時絶対座標基準
ABS
1
グラフィックフィードチェック有効
FCK
1
TR2
1
一覧表で O9000以後のプログラムを隠す
EX9
1
一覧表で O8000以後のプログラムを隠す
EX8
1
SJ2
1
SJ1
1
JOS
1
EFN
1
プログラム編集画面で部分複写機能を使用
PTC
1
サーボ波形でアナログ入力電圧を自動拡大表示
VAR
1
グラフィック画面プレビュウ機能で経路に補正値を入れない
特殊診断でインタラプト診断を実施
6402
6403
特殊診断用
手動運転の位置画面に‘POS
セット 有効
SET’
メニューを表示し相対0
プログラム編集画面でファイル操作機能を使用
6405
ドリル加工用グラフィック画面選択 *(X-Y平面固定)
6408
DRG
1
グラフィック画面でX軸を拡大表示
6409
XAR
1
PC-NCの一般診断画面で画面にSENTROL300のようにデュアルポ
ジション診断を表示
6452
DDP
1
アラームが発生してもアラーム画面にならない
8000
NPA
1
グラフィック画面で早送り経路領域を無視
8002
RPC
1
7-146
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
グラフィック対話入力有効
8002
CAP
ブザー機能無効
BZ2
1
キーを押すときブザー機能無効
BUZ
1
自動工具経路画面消去(リセット入力時)
TPE
1
英語表示
ENG
1
PRB
1
PLCアドレス値(D500〜D503)でスピンドルの実速度表示
ASD
1
実フィード速度表示をしない
FND
1
パラメータの入力無視
8003
基本言語を表示
8005
1
E軸の名称の使用を許可
8012
EAX
1
モード変更時、画面が変更しない
8013
NSC
1
プレビュウ表示時、Gコード文法アラームを表示しない
8014
DAC
1
PLC自己診断で表示されるXアドレスのデータ数
9000
0〜432
PLC自己診断で表示されるYアドレスのデータ数
9001
0〜432
PLC自己診断で表示されるRアドレスのデータ数
9002
0〜519
PLC自己診断で表示されるDアドレスのデータ数
9003
0〜511
25. 加工条件設定画面の設定
原点復帰、手動運転、ハンドル運転モード選択時、加工条件設
定画面を表示
6400
PDM
1
自動運転選択時に加工条件設定画面を表示
6401
PDS
1
図式一覧表で1画面に4つの図を表示
6403
BM4
1
加工条件設定画面Gコード生成機能使用
6406
CSP
1
PNO
1
加工条件設定画面で#500で選択されたプログラム番号を入力
スケジューリング機能油圧サーボドリルマシン仕様選択
6407
DR2
1
スケジューリング機能マクロでセーブされている同じ名前の
ファイルがあるとき上書きをする.
6408
CPO
1
マクロデータ入力位置で‘CLR’メニューを表示
8003
MCL
1
図式一覧表をビットマップで表示
8010
BMP
1
加工条件設定画面で自動モードと他のモードの画面を区別して表示
8011
UMC
1
加工条件設定画面でデータ単位間に空白を挿入
8011
UBC
1
加工条件設定画面で小さいフォントを使用
SMF
1
加工条件設定画面でテキスト計算機能を使用
CLT
画面設定を選択した時、表示する画面の番号
7-147
8020
画面番号
〜 9500
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
26. PLC保守設定
Y信号にマニュアルデータを出力
2001
MNL
1
RAM運転
RAM
1
シーケンスコンパイル時のロウレベル分割 有効
LWS
1
シーケンス編集機能 有効
SQC
1
シーケンスコンパイルを行う時のロウレベル分割ステップ数
G2.7信号 <SLA>により禁止区域の変換 有効
2010
5200
POT
0〜100
1
アナログ出力時、エンコーダでrpm計算した値を出力するRア
ドレス
5642
0〜498
F152.7をONする実行Fコードの値
6139
mm
PLC軸設定時、PLCのGアドレスはパラメータより優先
6403
PAC
1
PLC信号で絶対座標設定機能 有効
6407
PL0
1
PLR
1
PLC絶対座標0セット機能で相対座標も0にする
PLCでオーバライド値(G12)が0に指定された時、0になる
ことを無効にする時間
7605
msec
PLCの FROM, TO機能受信パラメータをNon Parityで行う
8003
NPT
1
ラダー画面でサーチするとき最後の時は先頭に、先頭の時は最
後にスクロールし続けてサーチ
8011
ST2
1
ラダー画面でアドレスを最初にサーチするときに先頭からサー
チ
ST1
1
PLCによる指定位置移動時、各軸ごとに速度指定する
EAC
1
PLCによる指定位置移動が自動運転前でも可能(PLC軸で)
8012
AMA
1
AVOで指定された軸のエンコーダカウンタを利用して実速度
(rpm)を計算し、パラメータ5642番に登録されたPLCのRア
ドレスに出力
8014
AVP
1
DPRINT文のタイプはWHILE文をクリア
MPF
1
BPRINT/DPRINT文のEOBはODH
DCR
1
DI4
1
DIM
1
OR7
1
移動実速度をF142〜F145に出力する時、対象軸を7軸に指定
OR6
1
移動実速度をF142〜F145に出力する時、対象軸を6軸に指定
OR5
1
移動実速度をF142〜F145に出力する時、対象軸を5軸に指定
OR4
1
移動実速度をF142〜F145に出力する時、対象軸を4軸に指定
OR3
1
移動実速度をF142〜F145に出力する時、対象軸を3軸に指定
OR2
1
移動実速度をF142〜F145に出力する時、対象軸を2軸に指定
OR1
1
移動実速度をF142〜F145に出力する時、対象軸を1軸に指定
OR0
1
ORB
1
移動実速度をF142〜F145に出力する時、対象軸を11軸に指定
ORA
1
移動実速度をF142〜F145に出力する時、対象軸を10軸に指定
OR9
1
移動実速度をF142〜F145に出力する時、対象軸を9軸に指定
OR8
1
DPRINT出力を利用したシステムで動作チェックを使用
8015
DPRINT出力動作チェック時、R400〜R409に入力データ、R410に
入力バイト数を入れる
移動実速度をF142〜F145に出力する時、対象軸を8軸に指定
移動実速度をF142〜F145に出力する時、対象軸を12軸に指定
7-148
9018
9019
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
27. SKIP機能
SKIP機能(PLC入力)の送り速度はF指令
1400
SKIP機能(PLC入力)の送り速度
1428
<TMB>=1の場合、高速SKIP信号を使用.
6002
OHS
0
SKIP信号の接点はB接点
7200
SAB
1
SKIP信号のトリガーはHIGH
HSR
1
SKIP機能に高速SKIP信号を使用.
HSS
1
高速SKIP機能実行中に送り速度をFで指定
SFP
0
G04指令時、SKIP1 (SKIP)信号 有効
DS1
1
G04指令時、SKIP2信号 有効
DS2
1
G04指令時、SKIP3信号 有効
DS3
1
G04指令時、SKIP4信号 有効
DS1
1
G31(G31.1), G31.2を有効にするSKIP信号は、SKIP1(SKIP)
7201
SKF
*mm/min
#S1
G31(G31.1), G31.2を有効にするSKIP信号は、SKIP2
#S2
G31(G31.1), G31.2を有効にするSKIP信号は、SKIP3
#S3
G31(G31.1), G31.2を有効にするSKIP信号は、SKIP4
#S4
G31.3, G31.4を有効にするSKIP信号は、SKIP1(SKIP)
7202
0
#は
G31(G31.1)→1
G31.2→2
#S1
G31.3, G31.4を有効にするSKIP信号は、SKIP2
#S2
G31.3, G31.4を有効にするSKIP信号は、SKIP3
#S3
G31.3, G31.4を有効にするSKIP信号は、SKIP4
#S4
#は
G31.3→3
G31.4→4
G31, G, 31.1が有効な時の送り速度
7211
*mm/min
G31.2が有効な時の送り速度
7212
*mm/min
G31.3が有効な時の送り速度
7213
*mm/min
G31.4が有効な時の送り速度
7214
*mm/min
SKIP機能実行時、全ての軸に対し位置データを登録
8014
7-149
SKM
1
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
28. リバース/リトレース機能
リトレース機能リバースの送り速度
1494
*㎛
リバース/リトレース機能実行時、G10実行
6408
G10
1
リバース/リトレースを実行時、G31.1 SKIP機能を無視
8014
N31
1
リターンする速度は送り速度
1402
RTF
1
全ての軸を同時にリターン
6404
RTT
1
位置復帰座標系指定2
8012
AS1
29. 自動運転位置復帰(リターン)機能
位置復帰座標系指定1
AS0
リターン機能を使用
RET
1
1601
OVB
1
6901
MA4
30. ブロックオーバラップ機能
ブロックオーバラップ機能を使用
31. ポジションスイッチ機能
POS SW1〜SW4の比較座標系を選択(機械座標/絶対座標)
POS SW5〜SW8의の比較座標系を選択(機械座標/絶対座標)
MA3
POS SW9〜SW12의の比較座標系を選択(機械座標/絶対座標)
MA2
POS SW13〜SW16의の比較座標系を選択(機械座標/絶対座標)
MA1
ポジションスイッチ機能 有効
IGP
ポジションスイッチ1の対称軸番号
1
6910
∣
∣
ポジションスイッチ25の対称軸番号
6925
ポジションスイッチ1の対称軸設定範囲の最大値
6930
∣
∣
ポジションスイッチ25の対称軸設定範囲の最大値
6945
ポジションスイッチ1の対称軸設定範囲の最小値.
6950
∣
∣
ポジションスイッチ25の対称軸設定範囲の最小値.
6965
32. プログラム再開/リスタート機能
プログラム再開実行時、途中で解除された時、残余移動量を絶
対座標にフィードバックし、機械座標と絶対座標の関係を回復
PRC
1
簡易プログラム再開でカーソル位置からG00、G28、G30を探し
て、そのブロックでプログラム再開を実行
SPM
1
簡易プログラム再開をQモードで実行
TPQ
1
プログラム再開を簡易モードで実行
EPR
1
プログラム再開点まで移動する時の軸順序
7111
7110
7-150
1〜8
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
33. リジッドタッピング機能
リジッドタッピング開始時、主軸の原点復帰を行わない
5603
RPR
リジッドタッピング用ポジションコーダの主軸1回転当りの発
生パルス数
5603
5603
5605
PP1
PP0
PP2
1
主軸およびZ軸の位置ループゲイン
5614
0.01/sec
主軸の原点復帰速度
5615
rpm
主軸の原点復帰位置のシフト量
5616
検出単位
主軸ゲインコンスタント
5691
mV
主軸ゲインコンスタント (ギア2)
5692
mV
主軸ゲインコンスタント (ギア3)
5693
mV
主軸ゲインコンスタント (ギア4)
5694
mV
主軸およびZ軸の加減速時定数
5751
msec
主軸停止状態の位置偏差量の限界値
5752
検出単位
主軸移動時の位置偏差量の限界値
5754
検出単位
主軸ポジションの幅
5775
検出単位
主軸のバックラッシュ
5776
検出単位
リジッドタッピングモードを指令するMコード
5757
リジッドタッピングリターン時の回転速度
5758
rpm
主軸およびZ軸の加減速時定数 (ギア2)
5761
rpm
主軸およびZ軸の加減速時定数 (ギア3)
5762
rpm
主軸およびZ軸の加減速時定数 (ギア4)
5763
rpm
主軸の許容最高回転数
5766
rpm
主軸の許容最高回転数 (ギア2)
5767
rpm
主軸の許容最高回転数 (ギア3)
5768
rpm
主軸の許容最高回転数 (ギア4)
5769
rpm
手動リジッドタッピング軸
5770
0〜16
手動リジッドタッピングリード
5771
0.001mm
34. マクロインタラプト
ブロックエンドインタラプトを指定
7002
MIN
1:END 0:STOP
ステイタストリガーを指定
TSE
1:STATUS
マクロインタラプト有効/無効をMコードで指定
MPR
1
マクロインタラプト 有効
MUS
1
マクロインタラプト有効化Mコード番号
7033
マクロインタラプト無効化Mコード番号
7034
7-151
0:EDGE
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
35. スピンドル
周速一定制御中の位置決定指令(G00など)は、現在位置を使用
せずに終点座標値を使用
5603
RSC
1
主軸2軸高速タッピング機能を使用
5605
WHT
1
NC軸をPLC軸を利用してスピンドルのように使用する場合
の実速度を表示する軸番号
5610
ポジションコーダパルス数をパラメータで指定
5641
スピンドル用D/Aコンバータのゼロオフセット
6154
スピンドル1の電圧出力速度到達比率調節機能 有効
1〜8
9019
AVP
1
8100
CN7
1
ファイル情報の更新制御 有効
CN6
1
ファイル情報にコメントを付ける
CN5
1
ファイル受信要求の高速受信 有効
CN4
1
ファイル受信要求の高速送信 有効
CN3
1
ファイル情報高速受信 有効
CN2
1
ファイル受信要求の受付を許可
CN1
1
ファイル送信要求の受付を許可.
CN0
1
CND
1
NCがリセット状態でない時もSnetと通信可能
CNC
1
MITSUBISHI PLCとの通信で、ライト命令を失敗するとデー
タをバッファに貯めて後でバッファ内データを送信
CNB
1
MITSUBISHI PLCとの通信で、リード命令に対する応答を受
信した後、NC内部のPLCを処理しライト命令を送信
CNA
1
MITSUBISHI
令を送信
CN9
1
CN8
1
36. ネットワーク
遠隔操作データ受信確認 有効
LANケーブルを抜いてもアラームを発生しない
8101
PLCとの通信で、データを受信後すぐに次の命
ネットワークで受信データをすぐに処理
ネットワーク接続最大接続数
8110
ネットワーク回答遅延時間
8111
msec
ネットワーク命令反復周期
8120
msec
ネットワーク命令反復数
8121
ファイル情報要求反復周期
8122
ファイル情報要求反復回数
8123
ファイル情報パケット
8124
ファイル受信要求反復周期
8125
ファイル受信要求反復回数
8126
ファイル受信パケット
8127
ファイル受信パケット数
8128
スレーブNCで軸位置データ出力(固定ドレス)
マクロデータをマクロデータ符合が無い正数(4バイト,
FFFFFFH)で処理
マクロデータは 1/1000まで有効
7-152
8160
0〜
msec
msec
CAX
1
DUL
1
M3D
1
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
PLC LAN通信機能2ポートをマクロデータで指定
8160
LMC
1
PLC LAN通信機能2ポート 有効(スレーブ)
L2C
1
PLC LAN通信機能をホストで実行する時、LAN通信機
能ホストとして使用
LNH
1
PLC LAN通信機能 有効
LNS
1
ターゲットNC1のIPアドレス1
8161
1〜255
ターゲットNC1のIPアドレス2
8162
1〜255
ターゲットNC1のIPアドレス3
8163
1〜255
ターゲットNC1のIPアドレス4
8164
1〜255
ターゲットNC1のポート番号
8165
ターゲットNC1で受けるデータの開始アドレス(R)
8166
ターゲットNC1で受けるデータのバイト数
8167
ターゲットNC1に送るデータの開始アドレス
8168
ターゲットNC1に送るデータのバイト数
8169
ターゲットNC2のIPアドレス1
8171
ターゲットNC2のIPアドレス2
8172
ターゲットNC2のIPアドレス3
8173
ターゲットNC2のIPアドレス4
8174
ターゲットNC2のポート番号
8175
ターゲットNC2で受けるデータの開始アドレス
8176
ターゲットNC2で受けるデータのバイト数
8177
ターゲットNC2に送るデータの開始アドレス
8178
ターゲットNC2に送るデータのバイト数
8179
37. 遠隔操作機能
ハンドル軸単位の遠隔設定機能 有効
8150
NB7
1
遠隔運転開始/停止/リセット機能 有効
NB5
1
パラメータ遠隔修正機能 有効
NB2
1
ファイル送受信機能 有効
NB1
1
遠隔モニタリング機能 有効
NB0
1
NBA
1
NBB
1
全てのファイル受信
8151
遠隔速度調節機能 有効
7-153
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
38. ガス切断機用機能
M02コードによる繰り返し数
6130
0〜99
加工設定切断幅(仕様B)
6131
0.001mm
加工設定切断速度(仕様B )
6132
mm/min
切断速度が落ちたという信号を出力する制限速度(仕様B )
6133
mm/min
切断速度が落ちたという信号を出力する制限速度
6134
%
ブロック終了前PLC信号出力指定Mコード番号
6137
0〜1000
ブロック終了前PLC信号出力長さ
6138
mm
工具径補間による経路変化で円弧と直線間の短い直線部分が生
じることがあり、加工する時無視するその短い直線距離
8145
0〜5000
ガス切断機べべリング機能で円弧を加工時にB軸またはA軸の
角度補正機能を使う時、B軸移動時にA軸補正する
6203
BBA
1
A26
1
ALY
1:Y軸上
0:X軸上
ガス切断機用加工条件設定画面を使用
CPN
1
ガス切断機用アライメント機能を使用
ALF
1
RDS
1
グラフィック画面であらかじめ経路を表示
TRC
1
グラフィック画面プレビュウ機能で補正値を加えない経路を表示
ALC
1
位置復帰機能 有効
PPR
1
ガス切断機べべリング機能で円弧を加工時にB軸またはA軸の
角度補正機能を使用
アライメント機能で第1,第2点をY軸上の点に設定
自動運転プログラム画面でガス切断データを右側に表示
6401
6402
チェックサム機能 有効
6403
CRC
1
ガス切断機パターンAタイプでPLCタイマを使用
6404
CGP
1
整列画面で位置復帰機能使用
6407
MAL
1
ガス切断グラフィックプレビュウ画面で、X-、Y-の方向を
プラス方向にする
8003
CSM
1
ガス切断機 F7キーメニューをマスク
9014
GM7
1
ガス切断機 F6キーメニューをマスク
GM6
1
ガス切断機 F5キーメニューをマスク
GM5
1
ガス切断機 F4キーメニューをマスク
GM4
1
ガス切断機 F3キーメニューをマスク
GM3
1
ガス切断機 F2キーメニューをマスク
GM2
1
ガス切断機 F1キーメニューをマスク
GM1
1
ガス切断機キーメニューを全部マスク
GMA
1
7-154
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
39. レーザ/プラズマ切断機用機能(トレーシング機能)
自動加減速機能 有効
1401
ADC
1
実送り速度出力にF12、F13使用 有効
ACF
1
トレーシング機能 有効
TRA
1
8チャンネルトレーシング機能 有効
TR8
1
べべリングトレーシング機能 有効
BVT
1
高さセンサの特性較正機能 有効
CAL
1
ADR
1
直線型早送りオーバライド 有効
RVG
1
べべリングトレーシング機能で各角度、厚さ別の1点トレーシ
ングデータを編集可能
TBE
1
べべリングトレーシング機能で測定点1つでトレーシング
OPT
1
プラズマ用高さセンサ較正データを作成
PCA
1
BEB
1
G40.1、G41.1、G42.1の実行時法線方向制御を取消す
ADS
1
画面に全てのトレーシング軸の現在位置を
変えながら確認可能
TAF
1
TRV
1
法線方向制御(補正値維持型) 有効
1403
法線方向制御をべべリング用加工側に向かって行う
1404
+、-キーで軸を
トレーシング機能基準をプラズマ電圧で行う
トレーシング機能クリアランス1の値
6100
0.001mm
トレーシング機能クリアランス2の値
6101
0.001mm
トレーシング機能クリアランス3の値
6102
0.001mm
COMP. TIME 1
6103
msec
COMP. TIME 2
Collusion信号ON時のモータ制御補正時間
6104
msec
ポジション到達信号を出力するためのThreshold値.
6105
0.001mm
センサ10V出力時のワークとノズル間の距離
6106
0.001mm
トレーシング機能の基準電圧オフセット値
6107
V
トレーシング機能 NC入力電圧
6108
0.01V
トレーシング機能 プラズマ出力電圧
6109
V
トレーシング機能 動作時の比例ゲイン
6110
トレーシング機能 動作時の積分ゲイン
6111
トレーシング機能 動作時の微分ゲイン
6112
エッジ自動加減速時のインポジションエラー値
6113
검출단위
各トレーシング軸のアナログ入力電圧オフセット値
6114
10V=4096
トレーシング機能時モータ方向反転
TMD
1
トレーシング機能時クリアランス表示及びマクロ変数指定(#5840)
6115
TRD
1
トレーシング機能 有効
TRE
1
トレーシング機能で使用するアナログ入力チャンネル番号
6116
各軸ごとのトレーシング機能比例ゲイン
6117
べべリングトレーシング機能 動作角度
6118
1〜10
べべリングトレーシング機能 材料厚さ
6119
1〜10
7-155
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
C軸工具方向制御機能でC軸の移動量がこの設定値を越えると
工具アップ(M50)、ダウン(M51)を出力
6120
1 deg
C軸工具方向制御機能での工具幅補正量
6121
0.01mm
C軸工具方向制御機能でのオーバカット量
6122
0.01mm
C軸工具方向制御機能でコーナで工具がアップ/ダウンする場
合の工具幅補正量
6123
0.01mm
C軸工具方向制御機能でコーナで工具がアップ/ダウンする場
合オーバカット量
6124
0.01mm
X-Y平面方向制御 G02方向を反対にする
6127
bit7
1
M14, M15 工具アップ/ダウンMコード無効
MCL
1
方向制御C軸指定
SC1
1
方向制御C軸指定
SC0
1
X、Y軸をパラメタ1032番の値と円弧平面によって指定
SXY
1
トレーシング機能でトレーシングポジションのステップ数
6128
各軸ごとのトレーシング機能の-方向の比例ゲイン
6129
M02コードによる反復回数
6160
1〜16
0〜99
40. ウォータジェット切断機用機能
ウォータジェット用スローアップダウン(自動加減速)機能 有効
1041
SDW
1
1軸走行丸のこ盤専用画面を使用
6401
SAW
1
走行丸のこ盤特殊オプション 有効
6404
SWD
機械状態表示機能有効
6405
MSG
1
41. 1軸走行丸のこ盤用機能設定
管理者用で起動
MNG
1
走行丸のこ盤盤専用画面で自動運転時の表示はパネル模様
6406
SWE
1
木材の絵を機械の右にセット
8010
SWM
1
1041
SAD
1
QTL
1
42. 布団刺繍機用機能設定
布団刺繍機用主軸加減速機能 有効
布団刺繍機能 有効
布団刺繍機 Tajima.プログラム加工速度
6135
mm/min
布団刺繍機 Tajima.プログラム変換時スピンドル速度
6136
rev/min
アドレス
6141
上昇スイッチを利用したサイクルカウンタインポジションメインデータ
6142
上昇スイッチを利用したサイクルカウンタインポジションマックスデータ
TarboTec社のGコードをSENTROL300のGコードに変換
7-156
6143
6406
TE2
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
43. 服地裁断機用機能設定
裁断機C軸方向制御機能で連続裁断する最大距離
6125
0.01mm
裁断機C軸方向制御機能でM17 LARGE ADVANCE時の ADVANCE量
6126
0.01mm
44. 研削機用機能設定
荒研削時の目標研削力
6170
%
仕上げ研削時の目標研削力
6171
%
正研削力制御のゲイン
6172
砥石径補償タイプ
6173
正研削力制御機能で使用するMコード4個中最初の番号
6174
正研削力制御で使用する研削力を入力するディジタル入力のアドレス
6175
研削力(主軸負荷)100%に対する電圧
6176
%
正研削力用ローパスフィルタ
6177
%
オーバライド最大値100%
6201
GC2
1
6400
PBM
1
6400
GLS
1
2004
HOB
1042
SAP
1
位置データ基準でティーチングデータを管理
MVP
1
<SAP>=0のときカウントアップしたサンプリングデータでカウ
ントアップした数のブロックに作成
SPB
1
サーボOFF時、イネーブル信号を強制ON
EON
1
サーボOFF機能 有効
SOV
1
PST
1
ゲインコンスタントテーブル 有効
GTF
1
ティーチングで全てのポイントを保管
ZAP
1
セフティゾーン座標をX-,Y-次元で作成
DRZ
1
ポイントの線分合成でブロックを生成
ZPB
1
ジョイスティックでの入力を設定角度により補正
JAC
1
セフティゾーン機能 有効
SFZ
1
45. ポイントボーリング木工機械用機能設定
ポイントボーリング専用画面を使用 (O6000番台)
46. グラススクライビング機用機能設定
グラススクライビング専用画面を使用 (O5000番台)
47. ホブ盤用機能設定
ポジションコーダ減速比
48. スピニングマシン用機能設定
全てのサンプリングデータを保管
セフティゾーン機能をPLCのGアドレスで操作
NCインタラプト周期に対するサンプリング周期
7-157
1043
1044
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
X軸とZ軸の角度
1045
セフティゾーントレース時のX軸オフセット量
1046
セフティゾーントレース時のZ軸オフセット量
1047
NCインタラプト周期に対するサンプリング周期(セフティゾーン)
1048
セフティゾーン機能でゾーントレース時の送り速度
1049
X軸ジョイスティック角度補正範囲の最小値
1050
X軸ジョイスティック角度補正範囲の最大値
1051
X軸原点方向移動時、反対方向基準オーバライド値
1052
Z軸原点方向移動時、反対方向基準オーバライド値
1053
ジョイスティック出力電圧加減速時のリミッタ
1054
X軸、Z軸の電圧比率(X+方向)
1055
%
X軸、Z軸の電圧比率(X-方向)
1056
%
圧力指定データデーブル番号
1057
GEOHWA社のスピニング機械で“ㄷシーイム加工”をする
1058
スピニング機械のティーチング機能でマクロプログラムにT
コードを出力しない
ゲインコンスタントテーブルの対象軸にする
1818
各軸のインコンスタントテーブル1の値
mm/min
%
DIG
1
NTL
1
GCT
1
1841
∣
∣
各軸のインコンスタントテーブル9の値
1849
GEOHWA社のスピニング機械でカーリングダイの前進/後進機能使用
6203
CDI
1
タッチパネル用特別画面を使用
6406
SPN
1
GEOHWA社のスピニング機械のカーリング1使用
カーリング1Z軸も使用
6408
C12
1
GEOHWA社のスピニング機械のTM09/TM18の表示文字を“FRONT
DELAY”に設定
6409
TSC
1
7-158
3. 機能別パラメータリスト
3.2 パラメータリスト2 (システム構成者用)
パラメータの内容
番号
内容
*印は IS-B単位
49. その他
O8000〜O8999のプログラム編集禁止
0011
O8000〜O8999のプログラム実行中はプログラムを画面に表示しない
NE8
1
ND8
0
1
チョッピングモードで自動停止を無効
1042
CPS
バックグラウンドI/O 機能(ソフトDK)使用
2001
EDT
O9000〜O9999のプログラム編集禁止
2201
NE9
1
ND9
1
O9000〜O9999のプログラム実行中はプログラムを画面に表示しない
チェックサム機能 有効
6403
CSC
1
真円図測定機能第2バージョン 有効
6406
CRM
1
ADM
1
WCC
1
TJ2
1
ファイル“DmyInput”の内容でデモ動作を行う
自動運転起動時、ワーク補正コモン値を0にする
6407
Tajima社仕様の加工プログラムをSENTROL300仕様で入力
自動運転開始時、G10の設定を取消す
6409
C10
設定入力キー記憶機能を使用
6450
KC3
1
補正入力キー記憶機能を使用しない
KC2
1
プログラム入力キー記憶機能を使用
KC1
1
パワーON後自動的にモニタ機能のサンプリング開始
POM
1
0の時 :現在設定されているワーク座標系の絶対座標を0に設定
1〜6時:指定されたワーク座標系の絶対座標を0に設定
6490
NCでG257.0がONになった時、セーブする内部データ(マク
ロ、データテーブル、リレー、カウンタ)
6500
パラメータ6500番で指定されたデータの番号及びバイト数(P
LCデータの場合)
6501
円弧半径による送り速度クランプ処理で許容誤差量.
6616
0でない時、切削しない部分の速度オーバライド
6620
G92を実行する軸の絶対座標0の機械座標値を#900〜#907該当
軸番号にセーブ
0〜6
0.001mm
7002
92S
1
8000
BAK
1
PLC、マクロデータを起動時に1度だけファイルにセーブ
BKM
1
NCプログラムプロテクト機能 有効
PRT
1
パラメータ、ピッチ誤差、工具寿命データを起動時に1度だけ
ファイルにセーブ
検索、置き換えをワードの先頭の一部が一致しても行う
8002
WSM
1
ブザーの周波数を3000㎐にする.
8010
BZH
1
HLP
1
CLT
1
パラメータヘルプ機能 有効
テキスト計算機能T 有効
8011
パラメータ2020、2021番で使用するキーを確定
OPK
1
位置データ設定を絶対座標で行う
8010
PSM
1
ワークナンバーサーチ機能で指定したプログラムを選択プログ
ラムとして登録しない
8012
WNS
1
2ヘッドパラメータ変換機能 有効(16軸NC)
8013
HD2
1
G28.1命令時、O9010 カスタムマクロを呼び出す
8014
SCG
1
N0E
1
N0000 コードの使用を許可
7-159
第7章 パラメータ
パラメータの内容
番号
内容
*印は IS-B単位
G01 イグザクトストップ時、インポジションの代りにサイクル
カウンタかパラメータ6142、6143番で設定した範囲内にはいる
とエレメント終了する機能(G8.4がONの時)を使用
8015
ドリル機械でドリルの直径データとして超硬ドリル用データを
使用
RCC
1
DRT
1
1
50. オプション
理と楽と機能(ネジ加工) 有効
9101
RTP
MITSUBISHI社のスピンドルを使用
9103
SP0
1
0
SP1
0
1
FANUC/FUJI社のスピンドルを使用
G68/G69機能 有効(旋盤)
9104
MIR
基本言語/英語表示選択
8002
ENG
基本言語選択
8005
1
0:基本言語
1:英語
0:韓国語
1:日本語
2:中国語
SENTROL-PROでネットワークを使用
9104
NET
1
ネットワークを使用時ホストとして使用
9110
HST
1
COM
1
OMB
1
OMC
1
RS232C-1 ポートをネットワーク用として使用
オフセットメモリB
9109
オフセットメモリC
MPG2、3を使用
9105
H23
1
アラームヒストリーを使用
9111
ALM
1
キーヒストリーを使用
KEY
1
アラームヒストリーを画面表示
DSP
1
POD
1
ポジションコーダデータのダミー出力
9112
7-160
1.保守用器具
第 8 章 日常保守
1. 保守用器具
NCに供給される電源が適当なのか、配線に問題が無いかを確認するために下の測定器が
必要です。
(1) 測定器
測 定 器
条 件
用 途
交流電圧計
許容差± 2%以下
AC電源電圧の測定
直流電圧計
最大目盛り10V,30V
許容差± 2%以下
オシロスコープ
DC電源電圧の測定
一般測定および障害追跡
(2) 工具
+型ドライバ ………… 大,中,小
-型ドライバ ………… 中,小
2. エアフィルタ
メインユニットを取りつける機械側キャビネットにはエアフィルタがありますが、エア
フィルタはほこりが積もると効率が落ち、キャビネット内部の温度上昇の原因になるので定
期的に(一週間に一度)掃除をします。
① ボルトを緩めてエアフィルタをはずします。
② フィルタのほこりを取り除きます。
③ ボルトでエアフィルタを取りつけます。
8-1
第8章 日常保守
3. アフターサービス要請時の確認事項
当社のアフターサービス要請時には下の項目を確認して連絡してください。
1)いつ?
• 障害発生日時
2)何をするときに
• NCの運転モードが何なのか?
• 自動運転の場合‥‥‥‥‥プログラム番号、プログラム内容、工具補正量など
• 障害発生時の位置表示値
• 他の動作は正常に動作するのか
3)どのような障害
• アラーム番号
• PCB上のLED表示
• サーボユニットおよびスピンドルユニット上の表示
• 画面は正常に出るのか?
4)障害の頻度は
• 頻度はどの程度なのか?(毎回または時々)
• 他の機械の動作時なのか?
• 電源電圧は正常か?(他の機械の動作時に電圧が瞬間的にダウンしていないか?)
• 同じ操作をする時に、同じ障害が発生するのか
8-2
1. 基本INTERFACE接続図
付 録
1. 基本INTERFACE接続図 (SENTROL 306/304/308/356/354/358)
MAIN UNIT
EPS8基板
NO.1
MAIN UNIT
PSP8基板
CNMPG
HP20V
CABLE MPG
HP20V
MPG NO.1
CABLE MPG
CNA1
CABLE CNA1
MPG NO.2
OPTION
CABLE MPG
MPG NO.3
HP20V
CNA2
CABLE CNA2
CPS1基板
RS232C CNCOM1
Dsub9S
RS232C CNCOM2
Dsub9S
CABLE COM1
HP20V
PUNCH PANEL
CNA3
外部USB装置(USU2)
(OPTION)
CABLE USU
CABLE CNA3
HP26V
注) CNS1
CNUSB
(CRT) CND1
USBA
USBA
CABLE USB
Dsub15P
Dsub15P
CABLE CND1
(KEY) CND2
Dsub9P
Dsub9P
CABLE CND2
MOL4R
CABLE CNS1
CNUSB
CND1
(LCD)
HP20V
CNA4
CABLE CNA4
CNP1
HP20V
PSP8基板
(REV.2)
CNA5
MOL6R
CABLE CNA5
電源ON/OFF
SWITCH
HP20V
CNP1
MOL4R
CNA6
CABLE CNP1
DC24V AVR
CABLE CN90X
AC SERVO
UNIT
Y軸
CABLE CN90Y
AC SERVO
UNIT
Z軸
CABLE CN90Z
AC SERVO
UNIT
(第4軸)
CABLE CN90-4
AC SERVO
UNIT
A軸
CABLE CN90A
AC SERVO
UNIT
B軸
CABLE CN90B
AC SERVO
UNIT
C軸
CABLE CN90C
AC SERVO
UNIT
(第8軸)
CABLE CN90-8
AC SERVO
UNIT
X軸
CABLE CN90X
AC SERVO
UNIT
Y軸
CABLE CN90Y
AC SERVO
UNIT
Z軸
CABLE CN90Z
AC SERVO
UNIT
(第4軸)
CABLE CN90-4
AC SERVO
UNIT
A軸
CABLE CN90A
AC SERVO
UNIT
B軸
CABLE CN90B
AC SERVO
UNIT
C軸
CABLE CN90C
AC SERVO
UNIT
(第8軸)
CABLE CN90-8
CABLE CN2X
CABLE CN2Y
CABLE CN2Z
CABLE CN2-4
AC
MOTOR
X軸
AC
MOTOR
Y軸
AC
MOTOR
Z軸
AC
MOTOR
(第4軸)
EPS8基板
NO.2
DKU10 (SENTROL 300用)
(Display Keyboard Unit)
CND2
(Key)
CABLE CNDCOUT
CNDCOUT
AC SERVO
UNIT
X軸
CABLE CNA6
AC220V 単相
HP26V
VSF75-24
FINE SUNTRONIX
注) CNS2
CABLE CNS2
CABLE CN2A
CABLE CN2B
CABLE CN2C
CABLE CN2-8
AC
MOTOR
A軸
AC
MOTOR
B軸
AC
MOTOR
C軸
AC
MOTOR
(第8軸)
MAIN UNIT
DIO8基板 NO.1
CNIN1
F40
CABLE CNIN1
F40
I/O LINK
端子台
TG-1H40S
機械側
強電回路
CNOUT1
F40
CABLE CNOUT1
F40
I/O LINK
リレーボード
R32C-NS5A-40P
機械側
強電回路
I/O LINK
端子台
TG-1H20S
機械側
強電回路
CNIO1
F40
CABLE CNIO1
F20
F20
DIO8基板 NO.2
CNIN2
I/O LINK
リレーボード
R16C-NS5A-20P
MAIN UNIT
EPS8基板
NO.1
HP20V
CABLE CNA1
CNA1
CABLE CNA1L
HP20V
CNA2
機械側
強電回路
CABLE CNA2
CABLE CNA2L
HP20V
CNA3
F40
CABLE CNIN12
F40
I/O LINK
端子台
TG-1H40S
機械側
強電回路
CABLE CNA3
CABLE CNA3L
HP26V
CNOUT2
F40
CABLE CNOUT2
F40
I/O LINK
リレーボード
R32C-NS5A-40P
機械側
強電回路
CNIO2
F40
CABLE CNIO2
F20
I/O LINK
端子台
TG-1H20S
機械側
強電回路
F20
I/O LINK
リレーボード
R16C-NS5A-20P
機械側
強電回路
注) CNS1
CABLE CNS1
CABLE CNS1L
EPS8基板
NO.2
HP20V
CABLE CNA4
CNA4
CABLE CNA4L
DIO8基板 NO.3
CNIN3
CNOUT3
CNIO3
F40
F40
F40
CABLE CNIN3
CABLE CNOUT3
CABLE CNIO3
I/O LINK
端子台
TG-1H40S
機械側
強電回路
F40
I/O LINK
リレーボード
R32C-NS5A-40P
機械側
強電回路
F20
I/O LINK
端子台
TG-1H20S
機械側
強電回路
I/O LINK
リレーボード
R16C-NS5A-20P
機械側
強電回路
F40
F20
HP20V
CNA5
CABLE CNA5
CABLE CNA5L
9-1
HP20V
CNA6
CABLE CNA6
CABLE CNA6L
HP26V
注) CNS2
CABLE CNS2
CABLE CNS2L
CABLE CN2X
CABLE CN2Y
CABLE CN2Z
CABLE CN2-4
CABLE CN2A
CABLE CN2B
CABLE CN2C
CABLE CN2-8
AC
MOTOR
X軸
LINEAR
SCALE
AC
MOTOR
Y軸
LINEAR
SCALE
AC
MOTOR
Z軸
LINEAR
SCALE
AC
MOTOR
(第4軸)
LINEAR
SCALE
AC
MOTOR
A軸
LINEAR
SCALE
AC
MOTOR
B軸
LINEAR
SCALE
AC
MOTOR
C軸
LINEAR
SCALE
AC
MOTOR
(第8軸)
LINEAR
SCALE
付録
2. 基本INTERFACE 接続図 (SENTROL 303/353)
MAIN UNIT
EPS8基板
NO.1
MAIN UNIT
EPS8基板
CNMPG
HP20V
CABLE MPG
HP20V
MPG NO.1
CABLE MPG
CNA1
CABLE CNA1
MPG NO.2
OPTION
CABLE MPG
MPG NO.3
HP20V
CNA2
CABLE CNA2
CPS1基板
RS232C CNCOM1
RS232C CNCOM2
Dsub9S
Dsub9S
CABLE COM1
HP20V
PUNCH PANEL
CNA3
外部USB装置(USU2)
(OPTION)
CABLE USU
CABLE CNA3
HP26V
注) CNS1
CNUSB
(CRT) CND1
USBA
USBA
CABLE USB
Dsub15P
Dsub15P
CABLE CND1
(KEY) CND2
Dsub9P
Dsub9P
CABLE CND2
MOL4R
CABLE CNS1
CNUSB
CND1
(LCD)
HP20V
CNA4
CABLE CNA4
CNP1
CABLE CNP1
HP20V
CNA5
CABLE CNA5
PSU10 (DC24V電源UNIT)
DIO4基板
CNP1
MOL4R
DCOUT
MOL4R
DCOUT
HP20V
CNA6
CABLE CNA6
AC220V 単相
CABLE CNP1
HP26V
注) CNS2
MAIN UNIT
EPS8基板
NO.1
MAIN UNIT
DIO4基板
CNIO1
F50
CABLE CNIO1
F50
I/O LINK
端子台
TG-1H50B
機械側
強電回路
CABLE CNS2
HP20V
CABLE CNA1
CNA1
CABLE CNA1L
HP20V
CNA2
CNIO2
F50
CABLE CNIO2
F50
I/O LINK
端子台
TG-1H50B
CABLE CN90X
AC SERVO
UNIT
Y軸
CABLE CN90Y
AC SERVO
UNIT
Z軸
CABLE CN90Z
AC SERVO
UNIT
(第4軸)
CABLE CN90-4
AC SERVO
UNIT
A軸
CABLE CN90A
AC SERVO
UNIT
B軸
CABLE CN90B
AC SERVO
UNIT
C軸
CABLE CN90C
AC SERVO
UNIT
(第8軸)
CABLE CN90-8
AC SERVO
UNIT
X軸
CABLE CN90X
AC SERVO
UNIT
Y軸
CABLE CN90Y
AC SERVO
UNIT
Z軸
CABLE CN90Z
AC SERVO
UNIT
(第4軸)
CABLE CN90-4
AC SERVO
UNIT
A軸
CABLE CN90A
AC SERVO
UNIT
B軸
CABLE CN90B
AC SERVO
UNIT
C軸
CABLE CN90C
AC SERVO
UNIT
(第8軸)
CABLE CN90-8
CABLE CN2X
CABLE CN2Y
CABLE CN2Z
CABLE CN2-4
AC
MOTOR
X軸
AC
MOTOR
Y軸
AC
MOTOR
Z軸
AC
MOTOR
(第4軸)
EPS8基板
NO.2
DKU10 (SENTROL 300用)
(Display Keyboard Unit)
CND2
(Key)
MOL4R
AC SERVO
UNIT
X軸
機械側
強電回路
CABLE CNA2
CABLE CNA2L
HP20V
CNA3
CABLE CNA3
CABLE CNA3L
HP26V
注) CNS1
CABLE CNS1
CABLE CNS1L
EPS8基板
NO.2
HP20V
CABLE CNA4
CNA4
CABLE CNA4L
HP20V
CNA5
CABLE CNA5
CABLE CNA5L
HP20V
CNA6
CABLE CNA6
CABLE CNA6L
HP26V
注) CNS2
CABLE CNS2
CABLE CNS2L
9-2
CABLE CN2A
CABLE CN2B
CABLE CN2C
CABLE CN2-8
CABLE CN2X
CABLE CN2Y
CABLE CN2Z
CABLE CN2-4
CABLE CN2A
CABLE CN2B
CABLE CN2C
CABLE CN2-8
AC
MOTOR
A軸
AC
MOTOR
B軸
AC
MOTOR
C軸
AC
MOTOR
(第8軸)
AC
MOTOR
X軸
LINEAR
SCALE
AC
MOTOR
Y軸
LINEAR
SCALE
AC
MOTOR
Z軸
LINEAR
SCALE
AC
MOTOR
(第4軸)
LINEAR
SCALE
AC
MOTOR
A軸
LINEAR
SCALE
AC
MOTOR
B軸
LINEAR
SCALE
AC
MOTOR
C軸
LINEAR
SCALE
AC
MOTOR
(第8軸)
LINEAR
SCALE
3. DIO8基板 I/O信号一覧
3. DIO8基板 I/O信号一覧
接続例
CNIN1 入力信号(DI) 32点
CNOUT1 出力信号(DO) 32点
1
2
FG
1
OV
2
3
4
COMMON 0
3
OV
4
5
X0.0 *DEC1
6
X0.1 *HSKIP
5
6
FG
*DEC2
*EMG
7
X0.2
8
X0.3
7
8
FG
*DEC3
*ELS
9
X0.4
10
X0.5
9
Y3.7
10
Y1.7
11
X0.6 *DEC4
12
X0.7
11
Y3.6
12
Y1.6
13
COMMON 1
14
X1.0 *DEC5
13
Y3.5
14
Y1.5
15
X1.1
16
X1.2 *DEC6
15
Y3.4
16
Y1.4
17
X1.3
18
X1.4 *DEC7
17
Y3.3
18
Y1.3
19
X1.5
20
X1.6 *DEC8
19
Y3.2
20
Y1.2
21
X1.7
22
COMMON 2
21
Y3.1
22
Y1.1
23
X2.0 *DEC9
24
X2.1
23
Y3.0
24
Y1.0
25
X2.2 *DEC10 26
X2.3
25
Y2.7
26
Y0.7
27
X2.4 *DEC11 28
X2.5
27
Y2.6
28
Y0.6
29
X2.6 *DEC12 30
X2.7
29
Y2.5
30
Y0.5
31
COMMON 3
32
X3.0 *DEC13
31
Y2.4
32
Y0.4
33
X3.1
34
X3.2 *DEC14
33
Y2.3
34
Y0.3
35
X3.3
36
COMMON 4
35
Y2.2
36
Y0.2
37
X3.4 *DEC15 38
X3.5
37
Y2.1
38
Y0.1
39
X3.6 *DEC16 40
X3.7
39
Y2.0
40
Y0.0
* EMG : 非常停止信号
* ELS : 非常停止リミットスイッチ信号
* DEC1,2,3,4 ~ 16 : 原点復帰用減速開始信号
* HSKIP : 高速スキップ信号
注) 使わない軸の *DEC信号および*HSKIP信号は任意に使えます。
CNIO1 入力信号(DI)16点 / 出力信号(DO)16点
1
2
FG
3
X4.0
4
X4.1
5
X4.2
6
X4.3
7
X4.4
8
X4.5
9
X4.6
10
X4.7
11
COMMON 0
12
X114.0
13
X114.1
14
X114.2
15
X114.3
16
X114.4
17
X114.5
18
X114.6
19
X114.7
20
COMMON 1
21
22
23
0V
24
0V
25
Y412.7
26
Y4.7
27
Y412.6
28
Y4.6
29
Y412.5
30
Y4.5
31
Y412.4
32
Y4.4
33
Y412.3
34
Y4.3
35
Y412.2
36
Y4.2
37
Y412.1
38
Y4.1
39
Y412.0
40
Y4.0
( 24V COMMOM の場合 )
AVR
DIO8基板 NO.1
CNIN1-4
*DEC1
X0.0
CNIN1-5
*HSKIP
X0.1
CNIN1-6
*DEC2
X0.2
CNIN1-7
*EMG
X0.3
CNIN1-8
*DEC3
X0.4
CNIN1-9
*ELS
X0.5
CNIN1-10
*DEC4
X0.6
CNIN1-11
X0.7
CNIN1-12
0V
CNIN1-13
*DEC5
*DEC6
*DEC7
*DEC8
X1.0
CNIN1-14
X1.1
CNIN1-15
X1.2
CNIN1-16
X1.3
CNIN1-17
X1.4
CNIN1-18
X1.5
CNIN1-19
X1.6
CNIN1-20
X1.7
CNIN1-21
接続例
DV
Y0.0
CNOUT1-40
RELAY
0V
Y0.1
Y0.2
Y0.3
Y0.4
Y0.5
Y0.6
Y0.7
Y1.0
Y1.1
Y1.2
Y1.3
Y1.4
Y1.5
Y1.6
Y1.7
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
0V
CNOUT1-38
CNOUT1-36
CNOUT1-34
CNOUT1-32
CNOUT1-30
CNOUT1-28
CNOUT1-26
CNOUT1-24
CNOUT1-22
CNOUT1-20
CNOUT1-18
CNOUT1-16
CNOUT1-14
CNOUT1-12
CNOUT1-10
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
CNOUT1-1,3
AVR例 : VSF75-24
(MAKER:FINE SUNTRONIX)
9-3
RELAY
AVR
0V
24V
24V
付録
4. DIO4基板 I/O 信号一覧
接続例
CNIO1 入出力信号(DI/DO) 24/16点
1
FG
2
3
X0.0 *DEC1
4
X0.1
5
X0.2 *DEC2
6
X0.3 *EMG
7
X0.4 *DEC3
8
X0.5 *ELS
*DEC4
9
X0.6
10
X0.7
11
X1.0
12
X1.1
13
X1.2
14
X1.3
15
X1.4
16
X1.5
17
X1.6
18
X1.7
19
X2.0
20
X2.1
21
X2.2
22
X2.3
23
X2.4
24
X2.5
25
X2.6
26
X2.7
27
PDICOM0
28
PDICOM1
29
PDICOM2
30
PDICOM3
31
Y0.0
32
Y0.1
33
Y0.2
34
Y0.3
35
Y0.4
36
Y0.5
37
Y0.6
38
Y0.7
39
Y1.0
40
Y1.1
41
Y1.2
42
Y1.3
43
Y1.4
44
Y1.5
45
Y1.6
46
Y1.7
47
OV
48
OV
49
OV
50
OV
( 24V COMMOM の場合 )
AVR
DIO4基板
CNIO1-27
*DEC1
X0.0
CNIO1-3
X0.1
CNIO1-4
*DEC2
X0.2
CNIO1-5
*EMG
X0.3
CNIO1-6
*DEC3
X0.4
CNIO1-7
*ELS
X0.5
CNIO1-8
*DEC4
X0.6
CNIO1-9
X0.7
CNIO1-10
0V
CNIO1-28
* EMG : 非常停止信号
* ELS : 非常停止リミットスイッチ信号
* DEC1,2,3,4 : 原点復帰用減速開始信号
注) 使わない軸の *DEC信号は任意に
使えます。
X1.0
CNIO1-11
X1.1
CNIO1-12
X1.2
CNIO1-13
X1.3
CNIO1-14
X1.4
CNIO1-15
X1.5
CNIO1-16
X1.6
CNIO1-17
X1.7
CNIO1-18
接続例
DV
Y0.0
CNIO1-31
0V
Y0.1
CNIO2 入出力信号(DI/DO) 24/16点
1
FG
2
3
X3.0
4
X3.1
5
X3.2
6
X3.3
7
X3.4
8
X3.5
9
X3.6
10
X3.7
11
X4.0
12
X4.1
13
X4.2
14
X4.3
15
X4.4
16
X4.5
17
X4.6
18
X4.7
19
X114.0
20
X114.1
21
X114.2
22
X114.3
23
X114.4
24
X114.5
25
X114.6
26
X114.7
27
PDICOM0
28
PDICOM1
29
PDICOM2
30
PDICOM3
31
Y2.0
32
Y2.1
33
Y2.2
34
Y2.3
35
Y2.4
36
Y2.5
37
Y2.6
38
Y2.7
39
Y3.0
40
Y3.1
41
Y3.2
42
Y3.3
43
Y3.4
44
Y3.5
45
Y3.6
46
Y3.7
47
OV
48
OV
49
OV
50
OV
Y0.2
Y0.3
Y0.4
Y0.5
Y0.6
Y0.7
Y1.0
Y1.1
Y1.2
Y1.3
Y1.4
Y1.5
Y1.6
Y1.7
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
DV
0V
CNIO1-32
CNIO1-33
CNIO1-34
CNIO1-35
CNIO1-36
CNIO1-37
CNIO1-38
CNIO1-39
CNIO1-40
CNIO1-41
CNIO1-42
CNIO1-43
CNIO1-44
CNIO1-45
CNIO1-46
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
RELAY
CNIO1-1,47,48,49,50
AVR例 : VSF50-24
(MAKER:FINE SUNTRONIX)
9-4
RELAY
AVR
0V
24V
24V
5. RIO1基板 I/O信号一覧
5. RIO1基板 I/O 信号一覧
RIO1基板 NO.1
RIO1基板 NO.1
OPCN3 OPERATOR'S PANEL 入力信号
1
LG
20
OPOUT03
2
OPOUT02
21
OPOUT01
3
OPOUT00
22
X103.7
4
X102.7
23
X101.7
5
X100.7
24
X103.6
6
X102.6
25
X101.6
7
X100.6
26
X103.5
8
X102.5
27
X101.5
9
X100.5
28
X103.4
10
X102.4
29
X101.4
11
X100.4
30
X103.3
12
X102.3
31
X101.3
13
X100.3
32
X103.2
14
X102.2
33
X101.2
15
X100.2
34
X103.1
16
X102.1
35
X101.1
17
X100.1
36
X103.0
18
X102.0
37
X101.0
19
X100.0
OPCN4 OPERATOR'S PANEL 入力信号
1
LG
20
OPOUT07
2
OPOUT06
21
OPOUT05
3
OPOUT04
22
X107.7
4
X106.7
23
X105.7
5
X104.7
24
X107.6
6
X106.6
25
X105.6
7
X104.6
26
X107.5
8
X106.5
27
X105.5
9
X104.5
28
X107.4
10
X106.4
29
X105.4
11
X104.4
30
X107.3
12
X106.3
31
X105.3
13
X104.3
32
X107.2
14
X106.2
33
X105.2
15
X104.2
34
X107.1
16
X106.1
35
X105.1
17
X104.1
36
X107.0
18
X106.0
37
X105.0
19
X104.0
OPCN1 OPERATOR'S PANEL
1
Y100.0
20
2
Y100.2
21
3
Y100.4
22
4
Y100.6
23
5
Y101.0
24
6
Y101.2
25
7
Y101.4
26
8
Y101.6
27
9
Y102.0
28
10
Y102.2
29
11
Y102.4
30
12
Y102.6
31
13
Y103.0
32
14
Y103.2
33
15
Y103.4
34
16
Y103.6
35
17
0V
36
18
0V
37
19
0V
OPCN2 OPERATOR'S PANEL
1
Y104.0
20
2
Y104.2
21
3
Y104.4
22
4
Y104.6
23
5
Y105.0
24
6
Y105.2
25
7
Y105.4
26
8
Y105.6
27
9
Y106.0
28
10
Y106.2
29
11
Y106.4
30
12
Y106.6
31
13
Y107.0
32
14
Y107.2
33
15
Y107.4
34
16
Y107.6
35
17
0V
36
18
0V
37
19
0V
OPCN1
Dsub37P
入力信号
Y100.1
Y100.3
Y100.5
Y100.7
Y101.1
Y101.3
Y101.5
Y101.7
Y102.1
Y102.3
Y102.5
Y102.7
Y103.1
Y103.3
Y103.5
Y103.7
0V
0V
OPCN2
Dsub37P
OPCN3
Dsub37P
入力信号
Y104.1
Y104.3
Y104.5
Y104.7
Y105.1
Y105.3
Y105.5
Y105.7
Y106.1
Y106.3
Y106.5
Y106.7
Y107.1
Y107.3
Y107.5
Y107.7
0V
0V
OPCN3
AVR
24V
0V
TB2
24V
TB1
0V
-3
OPOUT00
-19
X100.0
-17
X100.1
-15
X100.2
-13
X100.3
-11
X100.4
-9
X100.5
-7
X100.6
-5
X100.7
-21
OPOUT01
-37
X101.0
-35
X101.1
-33
X101.2
-31
X101.3
-29
X101.4
-27
X101.5
-25
X101.6
-23
X101.7
RIO1基板 NO.1
OPCN4
OPCN1
LED LAMP
Dsub37P
-1
Y100.0
-20
Y100.1
-2
Y100.2
-21
Y100.3
-3
Y100.4
-22
Y100.5
-4
Y100.6
-23
Y100.7
-5
Y101.0
-24
Y101.1
-6
Y101.2
-25
Y101.3
-7
Y101.4
-26
Y101.5
-8
Y101.6
-27
Y101.7
0V
LAMP
DV
DV
DV
DV
DV
DV
DV
LED LAMP
DV
LAMP
DV
DV
DV
DV
DV
DV
DV
9-5
24V
TB2
0V
TB1
24V
0V
付録
6. その他の入出力信号
SENTROL306/304/308/356/354/358
SENTROL303/353
MAIN UNIT
DIO8基板
MAIN UNIT
DIO4基板
CNIN1
-8
*EMG
X0.3
CNIN1 RELEASE S/W
-10
CNIN1
-4
*ELS
X0.5
CNOUT1
-1,3
0V
AVR
0V
24V
AVR 例) VSF50-24
(FineSuntronix)
0V
非常停止信号入力
CNIO1
-8
CNIO1
-27
*ELS
X0.5
非常停止リミットスイッチ
信号入力および解除
0V
CNIO1
-6
*EMG
X0.3
非常停止信号入力
RELEASE S/W
非常停止リミットスイッチ
信号入力および解除
CNIO1
-47,48,49,50
AVR
0V
0V
24V
AVR 例) VSF50-24
(FineSuntronix)
CNIO1
CNOUT1
DV
MCCON
Y□.□
RELAY
DV
SERVO UNIT POWER ON 信号
MCCON
Y□.□
SERVO UNIT POWER ON 信号
RELAY
0V
0V
7. NC用 DC24V電源の接続
SENTROL306/304/308/356/354/358
SENTROL303/353
PSP8基板は電源ON/OFF回路を内蔵しています。
MAIN UNIT
MOL4R
AC220V 単線
3
1
4 +24V 2
MOL6R
電源ON/OFF
SWITCH
DKU10のDC24V電源はMAIN UNITの
CNDCOUT コネクタから供給するので、
MAIN UNITと同時に電源ON/OFF
するようにします
MOL4R
MOL4R
CNP1
CABLE CNP1
DC24V AVR
PSU10
MAIN UNIT
VSF75-24
FINE SUNTRONIX
AC220V 単線
DC24V AVR
CNP1
4 +24V 3
2 0V 1
FG
DKU10
CNP1
4 +24V 3
2 0V 1
FG
0V
CNDCOUT
4 0V 1 EOF
5
2 EON
6 +24V 3 COM
MOL4R
DKU10
CNP1
3
1
4 +24V 2
MOL4R
MOL4R
ON/OFF回路
電源ON/OFF
SWITCH
0V
PSU10
AC220V
単相
50/60Hz
VSF75-24
FINE SUNTRONIX
DC24V AVR
AC(L)
+
AC(N)
FG
0.5SQ
CABLE CNP1
MAIN UNIT
CNP1
-4 24V
-2 0V
AC220V 単線
50/60z
DC24V AVR
AC(L)
AC(N)
FG
電源ON SWITCH
-2 EON
電源OFF SWITCH
-1 EOF
キャビネットの
EARTH PLATEに
接地します
0.5SQ
CABLE CNDCOUT
CNDCOUT
-6 24V
-4 0V
(*)
DKU10
CNP1
-4 24V
-2 0V
DKU10とMAIN UNITのDC24V電源を同時に
ON/OFFしないとNCが正常に起動しない
ことがあります
(*)
9-6
0.5SQ
DKU10
CNP1
-4 24V
-2 0V
(*)
ON/OFF
COM -3
EON
-2
EOF
-1
(*)
は TWIST PAIR線を表します。
MAIN UNIT
CNP1
-4 24V
-2 0V
(*)
DCOUT
24V -4
0V
-2
ON/OFF回路
DKU10の DC24V電源はMAIN UNITの
CNDCOUT コネクタから供給するので
MAIN UNITと同時に電源をON/OFF
するようにします。
(*)
0.5SQ
(*)
CNDCOUT
-3 COM
キャビネットの
EARTH PLATEに接地すること
DCOUT
24V -4
0V
-2
電源ON
SWITCH
電源OFF
SWITCH
は TWIST PAIR線を表します。
8.機械側I/O用 DC24V電源
8. 機械側I/O用 DC24V電源の接続
SENTROL306/304/308/356/354/358
SENTROL303/353
一般I/O用およびOP.PANEL I/O用 DC24V電源は NC電源とは別に準備してください
DC24V電源を共有した場合、互いの影響により誤動作の原因になります
機械側I/O用 DC24V電源はNC用24V電源とは別に準備してください
DC24V電源を共有した場合、互いの影響により誤動作の原因になります
DIO8基板 NO.1,2,3
CNIN1,2,3,CNIO1,2,3
DIO4基板
CNIO1,2
0V
24V
COMMON
24V AVR
0V
24V
COMMON
24V
24V AVR
24V
0V
0V
CNOUT1,2,3,CNIO1,2,3
CNIO1,2
DV
24V
RELAY
AVR例 : VSF50-24
(MAKER:FINE SUNTRONIX)
DV
24V
RELAY
RELAY
AVR例 : VSF50-24
(MAKER:FINE SUNTRONIX)
RELAY
0V
0V
0V
0V
0V
0V
RIO2基板 NO.1,2,3
CNIN11,12,13
0V
24V
COMMON
CNOUT11,12,13
DV
24V
RELAY
RELAY
0V
0V
0V
RIO1基板 NO.1,2
OPCN1,2,5,6
24V
DV
0V
0V
0V
9. MPGの接続
SENTROL306/304/308/356/354/358
MAIN UNIT(PSP8基板)
CNMPG1
+5V
-12
0V
-14
HA1H
-11
HA1L
-1
HB1H
-2
HB1L
-3
+5V
0V
HA2H
HA2L
HB2H
HB2L
0V
HA3H
HA3L
HB3H
HB3L
20PIN SHIELD CABLE
MPG #1
+5V
0V
A
A
B
B
-13
-15
-4
-5
-6
-7
MPG #2
+5V
0V
A
A
B
B
-16
-8
-9
-17
-10
MPG #3
+5V
0V
A
A
B
B
SENTROL303/353
MAIN UNIT(EPS8基板)
CNMPG
+5V
-15
0V
-9
HA1H
-1
HA1L
-2
HB1H
-3
HB1L
-4
+5V
0V
HA2H
HA2L
HB2H
HB2L
HA3H
HA3L
HB3H
HB3L
20PIN SHIELD CABLE
MPG #1
+5V
0V
A
A
B
B
-16
-10
-5
-6
-7
-8
MPG #2
+5V
0V
A
A
B
B
-11
-12
-13
-14
MPG #3
+5V
0V
A
A
B
B
(*)
コネクタ GROUND
CLAMPに接続
(*)
(*)
コネクタ GROUND
CLAMPに接続
はTWIST PAIR線を表します
9-7
(*)
はTWIST PAIR線を表します
12. LAN INTERFACE
12. LAN INTERFACE
13. MAIN UNITと DKUの接続
MAIN UNIT(CPS1基板)
注意) このケ-ブルは
シールドタイプケーブルを
使いません (GROUND分離)
注意)
MAIN UNITとNETWORK HUBを接続
する CABLEは SHIELD TYPE LAN
CABLEを必ず使います
RJ-45 PLUG
R
CND1-1
R-GND
CND1-6
G
CND1-2
G-GND
CND1-7
B
CND1-3
B-GND
CND1-8
MONID0
CND1-11
MONID1
CND1-12
HSYNC
CND1-13
VSYNC
CND1-14
GND
CND1-5
GND
CND1-10
FG(コネクタ金属部)
PC
(LAN CARD)
2m 以下
MAIN UNIT(CPS1基板)
RJ-45 PLUG
CNLAN
1 TD+ ORG/WHT
2 TD- ORG
3 RD+ GRN/WHT
BLU
4
BLU/WHT
5
6 RD- GRN
BRN/WHT
7
BRN
8
MAIN UNIT
CNLAN
RJ-45 PLUG
RJ-45 PLUG
CABLE CNLAN
(STRAIGHT CABLE)
SHIELD TYPE
CABLE CNLAN
CATEGORY5 SHIELD TYPE LAN CABLE
TD+ ORG/WHT 1
TD- ORG
2
RD+ GRN/WHT 3
BLU
4
BLU/WHT 5
RD- GRN
6
BRN/WHT 7
BRN
8
(コネクタ金属部) FG
TD+ ORG/WHT
TD- ORG
RD+ GRN/WHT
BLU
BLU/WHT
RD- GRN
15m 以下
8
7
6
5
4
3
2
1
(注2)
CABLE CND2
SHIELD CABLE(注1)
CLOCK
CND2-1
GND
CND2-5
DATA
CND2-2
GND
CND2-3
SPEAKER+ CND2-6
GND
CND2-8
SPEAKER- CND2-7
GND
CND2-9
FG(コネクタ金属部)
NETWORK HUB
CND2-1 CLOCK
CND2-5 GND
CND2-2 DATA
CND2-3 GND
CND2-6 SPEAKER+
CND2-8 GND
CND2-7 SPEAKERCND2-9 GND
(コネクタ金属部) FG
(*)
(注2)
(*)
RJ-45 PLUG
BRN
BRN/WHT
GRN
BLU/WHT
BLU
GRN/WHT
ORG
ORG/WHT
DKU10
(Display Keyboard Unit)
CND1-1 R
CND1-6 R-GND
CND1-2 G
CND1-7 G-GND
CND1-3 B
CND1-8 B-GND
CND1-11 MONID0
CND1-12 MONID1
CND1-13 HSYNC
CND1-14 VSYNC
CND1-5 GND
CND1-10 GND
(コネクタ金属部) FG
(注2)
BRN/WHT
BRN
1 TD+ ORG/WHT
2 TD- ORG
3 RD+ GRN/WHT
BLU
4
BLU/WHT
5
6 RD- GRN
BRN/WHT
7
BRN
8
FG(コネクタ金属部)
RJ-45 PLUG
BRN
BRN/WHT
GRN
BLU/WHT
BLU
GRN/WHT
ORG
ORG/WHT
NETWORK HUB
1
2
3
4
5
6
7
8
CABLE CND1
SHIELD CABLE(注1)
(注2)
は TWIST PAIR線を表します
(注1) NOISE対策として CABLE両側にFERRITE COREを
付着します。
FERRITE CORE
MAKER:TDK ZCAT2035-0930A
8
7
6
5
4
3
2
1
(注2) CABLEの SHIELDはコネクタ金属部にだけ接続して
GND PINには接続しません
(NOISE대책)
9-9
12. LAN INTERFACE
12. LAN INTERFACE
13. MAIN UNITと DKUの接続
MAIN UNIT(CPS1基板)
注意) このケ-ブルは
シールドタイプケーブルを
使いません (GROUND分離)
注意)
MAIN UNITとNETWORK HUBを接続
する CABLEは SHIELD TYPE LAN
CABLEを必ず使います
RJ-45 PLUG
R
CND1-1
R-GND
CND1-6
G
CND1-2
G-GND
CND1-7
B
CND1-3
B-GND
CND1-8
MONID0
CND1-11
MONID1
CND1-12
HSYNC
CND1-13
VSYNC
CND1-14
GND
CND1-5
GND
CND1-10
FG(コネクタ金属部)
PC
(LAN CARD)
2m 以下
MAIN UNIT(CPS1基板)
RJ-45 PLUG
CNLAN
1 TD+ ORG/WHT
2 TD- ORG
3 RD+ GRN/WHT
BLU
4
BLU/WHT
5
6 RD- GRN
BRN/WHT
7
BRN
8
MAIN UNIT
CNLAN
RJ-45 PLUG
RJ-45 PLUG
CABLE CNLAN
(STRAIGHT CABLE)
SHIELD TYPE
CABLE CNLAN
CATEGORY5 SHIELD TYPE LAN CABLE
TD+ ORG/WHT 1
TD- ORG
2
RD+ GRN/WHT 3
BLU
4
BLU/WHT 5
RD- GRN
6
BRN/WHT 7
BRN
8
(コネクタ金属部) FG
TD+ ORG/WHT
TD- ORG
RD+ GRN/WHT
BLU
BLU/WHT
RD- GRN
15m 以下
8
7
6
5
4
3
2
1
(注2)
CABLE CND2
SHIELD CABLE(注1)
CLOCK
CND2-1
GND
CND2-5
DATA
CND2-2
GND
CND2-3
SPEAKER+ CND2-6
GND
CND2-8
SPEAKER- CND2-7
GND
CND2-9
FG(コネクタ金属部)
NETWORK HUB
CND2-1 CLOCK
CND2-5 GND
CND2-2 DATA
CND2-3 GND
CND2-6 SPEAKER+
CND2-8 GND
CND2-7 SPEAKERCND2-9 GND
(コネクタ金属部) FG
(*)
(注2)
(*)
RJ-45 PLUG
BRN
BRN/WHT
GRN
BLU/WHT
BLU
GRN/WHT
ORG
ORG/WHT
DKU10
(Display Keyboard Unit)
CND1-1 R
CND1-6 R-GND
CND1-2 G
CND1-7 G-GND
CND1-3 B
CND1-8 B-GND
CND1-11 MONID0
CND1-12 MONID1
CND1-13 HSYNC
CND1-14 VSYNC
CND1-5 GND
CND1-10 GND
(コネクタ金属部) FG
(注2)
BRN/WHT
BRN
1 TD+ ORG/WHT
2 TD- ORG
3 RD+ GRN/WHT
BLU
4
BLU/WHT
5
6 RD- GRN
BRN/WHT
7
BRN
8
FG(コネクタ金属部)
RJ-45 PLUG
BRN
BRN/WHT
GRN
BLU/WHT
BLU
GRN/WHT
ORG
ORG/WHT
NETWORK HUB
1
2
3
4
5
6
7
8
CABLE CND1
SHIELD CABLE(注1)
(注2)
は TWIST PAIR線を表します
(注1) NOISE対策として CABLE両側にFERRITE COREを
付着します。
FERRITE CORE
MAKER:TDK ZCAT2035-0930A
8
7
6
5
4
3
2
1
(注2) CABLEの SHIELDはコネクタ金属部にだけ接続して
GND PINには接続しません
(NOISE대책)
9-9
付録
14. SERVO MOTOR/UNITの接続
14.1 YASKAWA SIGMA/Ⅱ/Ⅲ/Ⅴ SERIES AC SERVOの接続
YASKAWA SIGMA/Ⅱ/Ⅲ/Ⅴ
AC SERVO UNIT
1CN/CN1
CABLE
1 SG
26
CNA1,2,3
2 SG
27
3
28
HP20V
HP50V
4
29 S-RDY+
(3M20F)
(3M50F)
5 V-REF 30 S-RDY6 SG
31 ALM+
7
32 ALM8
33 PAO
9
34 *PAO
10
35 PBO
11
36 *PBO
MAIN UNIT (EPS8基板)
CNA1,2,3
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 ENBLB
7
8
9 SALM
10 SRDY
11 AG
12
13 PAL
14 0V
15 PZH
16 0V
17 ENBLA
18 +24V
19 SVDICOM
20 +24V
12
13
14
15
16
17
18
19
20
21
22
23
24
25
CABLE
2CNX-A
2CNY-A
2CNZ-A
HP20V
(3M20F)
PCO
*PCO
HOUSING : 55100-0600
55100-0670
MAKER : MOLEX
SERVO ON
--> ON
20
47
+24VIN
ENBLB
6
40
S-ON
SERVO ON
入力信号
ENBLA
17
43
N-OT
逆回転禁止
入力信号
16
0V
正転禁止
入力信号호
42 P-OT
1
SERVO
ALARM
OVL
S-ON
*VRDY
P-OT
N-OT
SALM
SERVO
READY
9
31
ALM+
32
ALM-
29
S-RDY+
30
S-RDY-
SRDY
10
VCMD
1
5
V-REF
11
6
SG
SERVO ALARM
--> OFF
SERVO READY
--> ON
※
ANALOG
速度指令前
電圧出力
+24VIN
SG
19
ANALOG
速度指令電圧入力
AG
※
ENCODER
A相信号入力
ENCODER
B相信号入力
PC
*PC
PA
*PA
PB
*PB
20 FG
ENCODER
Z相信号入力
PAH
2
33
PAO
PAL
13
34
*PAO
PBH
3
35
PBO
PBL
4
36
*PBO
PZH
15
19
PCO
PZL
5
20
*PCO
14
2
ENCODER
B相信号出力
ENCODER
Z相信号出力
SG
0V
CN2 (SIGMAⅡ/Ⅲ/Ⅴ)
1 PG5V
2 PG0V
3 BAT(+) 4 BAT(-)
5 PS
6 *PS
ENCODER
A相信号出力
コネクタ GROUND
CLAMPにはんだ付け
※
は TWIST PAIR線を表します
ロ) SIGMAⅡ/Ⅲ/ⅤSERIES インクリメンタルENCODERの場合
CABLE 2CNX,2CNY,2CNZ
SHIELD CABLE
2CN
PA
*PA
PB
*PB
PC
*PC
PG5V
PG5V
PG5V
PG0V
PG0V
PG0V
FG
+24V
SVDICOM
イ) SIGMA SERIESの場合
YASKAWA SIGMA
AC SERVO UNIT
YASKAWA SIGMA/Ⅱ/Ⅲ/Ⅴ
AC SERVO UNIT
1CN / CN1
CABLE CNA1,2,3
SHIELD CABLE
CNA1,2,3
2CN (SIGMA)
1 PG0V
11
2 PG0V
12
3 PG0V
13
4 PG5V
14
5 PG5V
15
6 PG5V
16
7
17
8
18
9
19
10
AC SERVO MOTOR
37
38
39
40
41
42
43
44
45
46
47
48
49
50
MAIN UNIT
EPS8基板
MOTOR ENCODER
A
B
C
D
E
F
H
16
17
18
19
14
15
4
5
6
1
ENC
CABLE 2CNX,2CNY,2CNZ
SHIELD CABLE
CN2
PS
/PS
PG5V
PG0V
MOTOR ENCODER
5
6
1
ENC
2
コネクタシェル
(シェル)
ハ) SIGMAⅡ/Ⅲ/ⅤSERIES 絶対値ENCODERの場合
※
G
2
3
20
YASKAWA
SIGMAⅡ/Ⅲ/Ⅴ
AC SERVO UNIT
J
YASKAWA
SIGMAⅡ/Ⅲ/Ⅴ
AC SERVO UNIT
CABLE 2CNX,2CNY,2CNZ
SHIELD CABLE
CN2
PS
/PS
PG5V
PG0V
BAT(+)
BAT(-)
5
6
1
2
ENC
3
4
コネクタシェル
BAT(+)
BAT(-)
MOTOR ENCODER
(シェル)
※
は TWIST PAIR線を表します
注) 詳しい内容は YASKAWA SERVO MANUALを参照してください
9-10
14. AC SERVOの接続
14.2 HIGEN AC SERVO
付録
14.2 HIGEN AC SERVO(FDA-5000/6000/7000)の接続
MAIN UNIT (EPS8基板)
CNA1,2,3
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 ENBLB
7
8
9 SALM
10 SRDY
11 AG
12
13 PAL
14 0V
15 PZH
16 0V
17 ENBLA
18 +24V
19 SVDICOM
20 +24V
CABLE
CNA1,2,3
HP20V
HP50V
(3M20F)
(3M50F)
MS3108B20-29S (PLUG)
MS3057-12A
(CABLE CLAMP)
HIGEN FDA-5000/6000/7000
AC SERVO UNIT
CN1
1 GND
26 GND
2
27 SPDIN
3
28
4
29
5 PZO
30 /PZO
6 PB0
31 /PBO
7 PAO
32 /PAO
8
33
9
34
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
HP20V
(3M20F)
CCWLIM
SVONEN
ALARM
GND24V
GND24V
CN2
1 PW
2 /PW
3 PV
4 /PV
5 PU
6 /PU
7
8
9 0V
10
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
11
12
13
14
15
16
17
18
19
20
MAIN UNIT
EPS8基板
CNA1,2,3
+24V
SERVO ON
--> ON
20
49
+24VIN
ENBLB
6
18
SVOEN
SERVO ON
入力信号
ENBLA
17
15
CCWLIM
逆回転禁止
入力信号
38
ALMRST
ALARM
RESET
40
CWLIM
正転禁止
入力信号
39
ESTOP
非常停止
入力信号
24
+24V
ESTOP
CWLIM
18
SVDICOM
GND24
19
*OVL
SERVO
ALARM
SALM
9
20
ALARM
VRDY
SERVO
READY
SRDY
10
25
GND24
1
27
SPDIN
11
1
GND
16
※
ANALOG
速度指令電圧
出力
VCMD
ANALOG
速度指令電圧入力
AG
+24VIN
※
ENCODER
A相信号入力
ENCODER
B相信号入力
/PZ
FG
/PB
PZ
/PA
PB
ENCODER
Z相信号入力
PAH
2
6
PBO
PAL
13
31
/PBO
PBH
3
7
PAO
PBL
4
32
/PAO
PZH
15
5
PZO
PZL
5
30
/PZO
14
26
0V
コネクタ GROUND
CLAMPにはんだ付け
PA
5V
HIGEN AC SERVO UNIT
2CN
MOTOR ENCODER
20PIN SHIELD CABLE
18
15
16
13
14
11
5
6
3
4
1
2
19
9
※
12
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
ENC
(ロ) FLANGE SIZE 130,180,220 MOTORの場合
HIGEN AC SERVO UNIT
2CN
MOTOR ENCODER
20PIN SHIELD CABLE
18
15
16
13
14
11
5
6
3
4
1
2
19
9
※
12
※
A
B
C
D
E
F
K
L
M
N
P
R
H
G
J
は TWIST PAIR線を表します
9-11
ENCODER
B相信号出力
ENCODER
A相信号出力
ENCODER
Z相信号出力
GND
(イ) FLANGE SIZE 60,80 MOTORの場合
PA
/PA
PB
/PB
PZ
/PZ
PU
/PU
PV
/PV
PW
/PW
+5V
0V
FG
SERVO ALARM
--> OFF
0V
AC SERVO MOTOR
PA
/PA
PB
/PB
PZ
/PZ
PU
/PU
PV
/PV
PW
/PW
+5V
0V
FG
HIGEN FDA-5000/6000/7000
AC SERVO UNIT
CN1
CABLE CNA1,2,3
SHIELD CABLE
ENC
※
は TWIST PAIR線を表します
付録
14.3 PANASONIC MINAS A/A4/A5 SERIESの接続
PANASONIC MINAS A/A4/A5
MAIN UNIT
AC SERVO UNIT
SIGMA/Ⅱ/Ⅲ/Ⅴ
SERIES EPS8基板
AC SERVOの接続
MAIN UNIT (EPS8基板)14.1 YASKAWA
CABLE
CN I/F/X5/X4
CNA1,2,3
CNA1,2,3
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 ENBLB
7
8
9 SALM
10 SRDY
11 AG
12
13 PAL
14 0V
15 PZH
16 0V
17 ENBLA
18 +24V
19 SVDICOM
20 +24V
CNA1,2,3
CNA4,5,6
HP20V
HP50V
(3M20F)
(3M50F)
1
2
3
4
5
6
7 COM+
8 CWL
9 CCWL
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
CABLE
CN SIGX
CN SIGY
CN SIGZ
CN SIGA
SPR/TRQR
GND
OA+
OAOZ+
OZ-
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
ZEROSPD
+24V
SERVO ON
--> ON
SRV-ON
AC SERVO MOTOR
7
COM+
6
29
SRV-ON
SERVO ON
入力信号
ENBLA
17
9
CCWL
逆回転禁止
入力信号
8
CWL
正転禁止
入力信号
26
VS-SEL
速度0クランプ
入力信号
32
C-MODE
制御モード
転換入力信号
37
ALM+
36
ALM-
35
S-RDY+
34
S-RDY-
41
COM-
1
14
SPR/TRQR
11
15
GND
+24V
18
SVDICOM
COM-
*OVL
SERVO
ALARM
VRDY
SERVO
READY
SALM
SRDY
19
9
10
16
OB+
OBFG
BATT+
BATTRX/TX
-RX/-TX
+5V
0V
+5V
0V
FG
※
ENCODER
A相信号入力
ENCODER
B相信号入力
ENCODER
Z相信号入力
PAH
2
48
OB+
PAL
13
49
OB-
PBH
3
21
OA+
PBL
4
22
OA-
PZH
15
23
OZ+
PZL
5
24
OZ-
14
25
0V
※
MOTOR ENCODER
T
S
K
L
H
G
5
6
17
18
4
2
ENC
3
1
※
J
ロ) MINAS A4/A5 SERIESの場合
PANASONIC
MINAS A4/A5
AC SERVO UNIT
MOTOR ENCODER
CABLE CN SIGX,CN SIGY
CABLE CN SIGZ,CN SIGA
SHIELD CABLE
CN X6
E5V
E0V
1
2
3
4
PS
/PS
FG(커넥터CASE)
BAT
ENC
5
6
FG
※
は TWIST PAIR線を表します
絶対値ENCODERの場合接続します
9-12
ENCODER
B相信号出力
ENCODER
A相信号出力
ENCODER
Z相信号出力
GND
コネクタ GROUND
CLAMPに接続
CABLE CN SIGX,CN SIGY
CABLE CN SIGZ,CN SIGA
SHIELD CABLE
20
ANALOG
速度指令電圧入力
AG
イ) MINAS A SERIESの場合
PANASONIC MINAS A
AC SERVO UNIT
CN SIG
SERVO READY
--> ON
※
VCMD
CN X6 (MINAS A4/A5)
1 E5V
2 E0V
3
4
5 PS
6 /PS
HOUSING : 55100-0600
55100-0670
MAKER : MOLEX
SERVO ALARM
--> OFF
0V
ANALOG
速度指令電圧
出力
CN SIG (MINAS A)
1 0V
11
2 0V
12
3 +5V
13
4 +5V
14
5 BATT+
15
6 BATT16
7
17 RX/TX
8
18 -RX/-TX
9
19
10
20 FG
HP20V
(3M20F)
20
ENBLB
C-MODE
S-RDYS-RDY+
ALMALM+
PANASONIC MINAS A/A4/A5
AC SERVO UNIT
CN I/F/X5/X4
CABLE CNA1,2,3
SHIELD CABLE
は TWIST PAIR線を表します
14. AC SERVOの接続
14.4 MITSUBISHI MR-J2
14.4 MITSUBISHI MR-J2 SERIES AC SERVOの接続
MAIN UNIT (EPS8基板)
CNA1,2,3
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 ENBLB
7 PRDYB
8 PRDYA
9 SALM
10 SRDY
11 AG
12
13 PAL
14 0V
15 PZH
16 0V
17 ENBLA
18 +24V
19 SVDICOM
20 +24V
CABLE
CNA1,2,3
HP20V
HP20V
(3M20F)
(3M20F)
MITSUBISHI MR-J2 SERIES
AC SERVO UNIT
CN1B
1 LG
11
2 VC
12
3 VDD
13 COM
4
14
5 SON
15 EMG
6
16 LSP
7
17 LSN
8 ST1
18 ALM
9
19
10 SG
20 SG
CN1A
1
2
3
4
5 LZ
6 LA
7 LB
8
9
HP20V
(3M20F)
HC-SF,HC-RF SERIES MOTOR
MS3106B20-29S (PLUG)
MS3057-12A (CABLE CLAMP)
MAIN UNIT
EPS8基板
CNA1,2,3
POWER READY
--> ON
SERVO ON
--> ON
MITSUBISHI MR-J2 SERIES
AC SERVO UNIT
CN1B
CABLE CNA1,2,3
20PIN SHIELD CABLE
PRDYB
7
PRDYA
8
ENBLB
6
+24V
3
VDD
13
COM
5
SON
SERVO ON
入力信号
8
ST1
正転指令
入力信号
17
LSN
逆回転禁止
入力信号
16
LSP
正転禁止
入力信号
15
EMG
非常停止
入力信号
ENBLA 17
16
0V
10
11
12
13
14
15
16
17
18
19
20
10
20
SVDICOM 19
*OVL
LZR
LAR
LBR
SERVO
ALARM
SALM
SG
9
18
ALM
SERVO ALARM
--> OFF
※
ANALOG
速度指令電圧
出力
VCMD
SG
1
2
VC
11
1
LG
10
19
ANALOG
速度指令電圧入力
AG
RD
SG
CN1A
VRDY
SERVO
READY
SRDY
RD
※
AC SERVO MOTOR
CABLE
CN2X
CN2Y
CN2Z
CN2
1 LG
2 LG
3
4
5
6
7 MR
8
9 BAT
HP20V
(3M20F)
HC-MF,HC-UF,HA-FF SERIES MOTOR
1-172161-9 (MAKER:AMP)
11
12
13
14
15
16
17
18
19
20
10
ENCODER
A相信号入力
LG
ENCODER
B相信号入力
ENCODER
Z相信号入力
MRR
P5
PAH
2
7
LB
PAL
13
17
LBR
PBH
3
6
LA
PBL
4
16
LAR
PZH
15
5
LZ
PZL
5
15
LZR
14
20
0V
P5
コネクタ GROUND
CLAMPのはんだ付け
※
イ) HC-SF,HC-RF SERIES MOTORの場合
CABLE CN2X,CN2Y
CABLE CN2Z
SHIELD CABLE
MR
MRR
P5
LG
P5
LG
MOTOR ENCODER
C
D
S
R
7
17
18
2
PG
20
12
※
GROUND PLATE
※
N
は TWIST PAIR線を表します
ロ) HC-MF,HC-UF,HA-FF SERIES MOTORの場合
CABLE CN2X,CN2Y
CABLE CN2Z
SHIELD CABLE
MITSUBISHI MR-J2
AC SERVO UNIT
CN SIG
MR
MRR
P5
LG
P5
LG
MOTOR ENCODER
7
1
MR
17
2
MRR
18
7
P5
2
8
LG
20
12
※
GROUND PLATE
※
9
は TWIST PAIR線を表します
9-13
SHD
SERVO READY
--> ON
ENCODER
B相信号出力
ENCODER
A相信号出力
ENCODER
Z相信号出力
SG
AC SERVO MOTOR
MITSUBISHI MR-J2
AC SERVO UNIT
CN SIG
SG
PG
は TWIST PAIR線を表します
付録
14.5 MITSUBISHI MR-J3 SERIES AC SERVOの接続
MAIN UNIT (EPS8基板)
CNA1,2,3
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 ENBLB
7 PRDYB
8 PRDYA
9 SALM
10 SRDY
11 AG
12
13 PAL
14 0V
15 PZH
16 0V
17 ENBLA
18 +24V
19 SVDICOM
20 +24V
CABLE
MITSUBISHI MR-J3 SERIES
CNA1,2,3
AC SERVO UNIT
CNA4,5,6
CN1
HP20V
HP50V
1
26
(3M20F)
(3M50F)
2 VC
27
3
28 LG
4 LA
29
5 LAR
30
6 LB
31
7 LBR
32
8 LZ
33
9 LZR
34
RECEPTACLE :
36210-0100JL
SHELL KIT
36310-3200-008
MAKER : 3M
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
SON
ST1
DICOM
CN2
1 P5
3 MR
5
7 MD
9 BAT
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
MAIN UNIT
EPS8基板
CNA1,2,3,4,5,6
+24V
POWER READY
--> ON
SERVO ON
--> ON
MITSUBISHI MR-J3 SERIES
AC SERVO UNIT
CN1
CABLE CNA1,2,3,4,5,6
20PIN SHIELD CABLE
18
20
DICOM
PRDYB
7
15
SON
SERVO ON
入力信号
PRDYA
8
ENBLB
6
17
ST1
正転指令
入力信号
44
LSN
逆回転禁止
入力信号
43
LSP
正転禁止
入力信号
42
EMG
非常停止
入力信号
46
DOCOM
COMMON 19
47
DOCOM
SALM
9
48
ALM
SRDY
10
49
RD
1
2
VC
11
28
LG
ENBLA 17
16
0V
EMG
LSP
LSN
*OVL
SERVO
ALARM
VRDY
SERVO
READY
SERVO ALARM
--> OFF
SERVO READY
--> ON
※
ANALOG
速度指令電圧
出力
DOCOM
DOCOM
ALM
RD
VCMD
ANALOG
速度指令電圧入力
AG
※
ENCODER
A相信号入力
ENCODER
B相信号入力
2 LG
4 MRR
6
8 MDR
ENCODER
Z相信号入力
PAH
2
6
LB
PAL
13
7
LBR
PBH
3
4
LA
PBL
4
5
LAR
PZH
15
8
LZ
PZL
5
9
LZR
ENCODER
B相信号出力
ENCODER
A相信号出力
ENCODER
Z相信号出力
10
コネクタ GROUND
CLAMPにはんだ付け
AC SERVO MOTOR
9-14
※
は TWIST PAIR線を表します
14. AC SERVOの接続
14.6 AC 220V電源
14.6 AC SERVO UNITと AC 220V電源の接続
MAIN UINT (DIO8基板)
RELAY
DV
CNOUT1-□
Y□.□
電源
RELAY
MC
0V
OV
OV
+24V
CNOUT1-1,3
AVR
SPARK
KILLER
注)□:この数値はSEQUENCE PROGRAMで決定
F7.2
Y□.□
PLC HIGH LEVEL 처리
AC SERVO UNIT
MC
R
AC 3Ø
220V
50/60Hz
NF
S
主回路の電源
T
r
注)
制御電源
t
注) 制御電源は接続端子がある場合に接続します
9-15
付録
15. SPINDLE MOTOR/UNITの接続
15.1 MITSUBISHI SPINDLE MDS-C1/B/A-SPA SERIESとの接続
MAIN UNIT
EPS8基板
CNS1
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 SRN
7 ESP
8 SET
9 ORC
10 DOCOM
11 FA
12 ZS
13 ORA
14
15
16
17
18
19
20
21
22
23
24
25
26
AG
+5V
PAL
0V
PZH
0V
SRI
HP26V
(3M26F)
HP20V
CABLE CNS1
HSP
+24V
COMMON
AC SPINDLE UNIT
MITSUBISHI MDS-C1-SPA
/MDS-B-SPA
/MDS-A-SPA
1 REDY
11 SRN
2 SRI
12 IN1
3 IN2
13 IN3
CN10
4
14
5
15
6
16
7
17 +24V
8
18
9
19 CES1
10 RG
20
1
USC
HP20V
..
CN11
7 OUT1
8 OUT3
..
10
HP20V
1
CN12
HP20V
CN8A
..
..
10
1
2
3
4
FA
GND
SYA
SYB
SYZ
..
7 SE1
8 SE2
9
10
ORIENTATION OPTIONがある旋盤の場合接続
RIGID TAPPING OPTIONがあるミーリングの場合接続
CABLE CN6
CN6
HP20V
1
2
3
4
5
GND
MA
MB
MZ
..
POSITION CODER
9
10
P5
11
..
17
18
..
20
11
..
..
20
11
12
13
14
..
17
18
19
20
11
12
13
14
15
..
19
20
MAIN UNIT
EPS8基板
CNS1
+24V
*FA
(F44.5)
SPINDLE故障
入力信号
ZS1
(F44.6)
ゼロ速度
入力信号
ORA1
(F44.4)
ORIENT
入力信号
USO
(F44.7)
速度到達
入力信号
FC
PG
23
CN12-20 FC
11
CN12-10 FA
SPINDLE故障
出力信号
CN10-17
ZS
12
CN11-7 OUT1
ORA
13
CN11-17 OUT2
USC
26
COMMON
24
CN11-8 OUT3
17
10
7
SET
8
SRN
正転指令 出力信号
(G43.6) 正転指令 --> ON
SRN
6
CN10-11 SRN
SRI
逆回転指令出力信号
(G43.5) 逆転指令 --> ON
SRI
20
CN10-2 SRI
ORC1
ORIENT指令 出力信号
(G43.7) ORIENT指令 --> ON
ORC
9
CN10-3 IN2
HSP
高速TAPPING 出力信号
(G42.2) 高速TAPPING --> ON
HSP
22
CN10-13 IN3
CN10-12 IN1
VCMD
1
CN8A-7 SE1
14
CN8A-8 SE2
ENCODER
B相信号入力
ENCODER
Z相信号入力
2
CN8A-2 SYA
PAL
16
CN8A-12 SYA*
PBH
3
CN8A-3 SYB
PBL
4
CN8A-13 SYB*
PZH
18
CN8A-4 SYZ
5
CN8A-14 SYZ*
PZL
※
P5
P5
AC SPINDLE UNIT
MITSUBISHI MDS-C1-SPA
/MDS-B-SPA
/MDS-A-SPA
CN6
MA
MA*
(C)
3
MB
(R)
13
MB*
(B)
4
MZ
(P)
14
MZ*
(H)
10
P5
(K)
1
GND
19
P5
11
GND
20
P5
15
GND
ENCODER
A相信号入力
ENCODER
B相信号入力
ENCODER
Z相信号入力
CONNECTOR CASE
0V
CABINETの
EARTH PLATEに接続
※
9-16
高速TAPPING
入力信号
ANALOG
速度指令電圧入力
0V ~ +10V
(RIGID TAPPING:±10V)
ENCODER
A相信号出力
ENCODER
B相信号出力
ENCODER
Z相信号出力
GND
コネクタ GROUND
CLAMPに接続
12
機械準備完了
入力信号
CN8A-1
0V
2
速度到達
--> ON
ORIENT指令
入力信号
PAH
19
(N)
ORIENT完了
--> ON
速度到達
出力信号
逆回転指令
入力信号
GND
※
AG
ENCODER
A相信号入力
(A)
ORIENT完了
出力信号
正転指令
入力信号
CN10-19 CES1
GND
MA*
MB*
MZ*
GND
ゼロ速度
--> ON
非常停止
入力信号
CN10-1 REDY
※
ANALOG
速度指令電圧出力
ゼロ速度
出力信号
RG
DOCOM
ESP
SYA*
SYB*
SYZ*
ALARM
--> OFF
CN10-10
SET1
機械準備完了 出力信号
(G42.4) 完了 --> ON
CABLE CN6
20PIN SHIELD CABLE
POSITION CODER
FA
0V
*ESP
非常停止 出力信号
(G43.4) 非常停止 --> OFF
OUT2
AC SPINDLE UNIT
MITSUBISHI MDS-C1-SPA
/MDS-B-SPA
/MDS-A-SPA
CABLE CNS1
SHIELD CABLE
は TWIST PAIR線を表します
は TWIST PAIR線を表します
15. SPINDLE UNITの接続
15.2 MITSUBISI MDS-B-SPAJ
15.2 MITSUBISHI SPINDLE MDS-B/A-SPJA SERIESとの接続
MAIN UNIT
EPS8基板
CNS1
1 VCMD
2 PAH
3 PBH
4 PBL
5 PZL
6 SRN
7 ESP
8 SET
9 ORC
10 DOCOM
11 FA
12 ZS
13 ORA
14
15
16
17
18
19
20
21
22
23
24
25
26
AG
+5V
PAL
0V
PZH
0V
SRI
HP26V
(3M26F)
CABLE CNS1
HSP
+24V
COMMON
USC
注) CN1の記号
コネクタ HIF3C-40D-2.54C
PIN
HIF3-2226SCA
MAKER HIROSE KOREA
BUILT IN ENCODER로
RIGID TAPPINGをする時は必要ありません
AC SPINDLE UNIT
MITSUBISHI MDS-B-SPJA
/MDS-A-SPJA
CN1
20B REDY
20A SRN
19B SRI
19A IN1
F40
18B IN2
18A IN3
17B
17A
16B
16A CES1
注)
15B
15A
14B
14A
13B
13A
12B
12A
11B
11A
10B
10A
9B
9A
8B US
8A ZS
7B OUT1
7A
6B
6A
5B
5A P24
4B
4A
3B
3A RG
2B FA
2A FC
1B
1A
HP20V
CN3
1
2
3
4
GND
SYA
SYB
SYZ
11
12
13
14
8
9 SE2
..
18
19
20
..
POSITION CODER
10
HP20V
CN2
1
2
3
4
5
6
7
8
9
10
BUILT IN ENCODER
GND
PC
PB
PA
MOH
MA
MB
MZ
11
12
13
14
15
16
17
18
19
20
P5
GND
SYA*
SYB*
SYZ*
MAIN UNIT
EPS8基板
AC SPINDLE UNIT
MITSUBISHI MDS-A-SPJA
/MDS-A-SPJA
CABLE CNS1
SHIELD CABLE
CNS1
+24V
*FA
(F44.5)
SPINDLE故障
入力信号
ZS1
(F44.6)
ゼロ速度
入力信号
ORA1
(F44.4)
ORIENT
入力信号
USO
(F44.7)
速度到達
入力信号
FA
23
CN1-2A FC
11
CN1-2B FA
12
CN1-8A ZS
ゼロ速度
出力信号
ゼロ速度
--> ON
ORA
13
CN1-7B OUT1
ORIENT完了
出力信号
ORIENT完了
--> ON
USC
26
CN1-8B US
速度到達
出力信号
速度到達
--> ON
COMMON
24
17
CN1-3A
RG
0V
非常停止出力信号
*ESP
(G43.4) 非常停止 --> OFF
DOCOM
10
ESP
7
CN1-19A IN1
SET1
機械準備完了出力信号
(G42.4)
SET
8
CN1-20B REDY
正転指令出力信号
SRN
(G43.6) 正転指令 --> ON
SRN
6
CN1-20A SRN
逆回転指令出力信号
SRI
(G43.5) 逆転指令 --> ON
SRI
20
CN1-19B SRI
ORIENT指令出力信号
ORC1
(G43.7) ORIENT指令 --> ON
ORC
9
CN1-18B IN2
高速TAPPING出力信号
HSP
(G42.2) 高速TAPPING --> ON
HSP
22
CN1-18A IN3
非常停止
入力信号
機械準備完了
入力信号
正転指令
入力信号
逆回転指令
入力信号
ORIENT指令
入力信号
CN1-16A CES1
高速TAPPING
入力信号
※
ANALOG
速度指令電圧出力
VCMD
SE1
1
CN3-18 SE1
14
CN3-9 SE2
PAH
2
CN3-2 SYA
PAL
16
CN3-12 SYA*
PBH
ENCODER
B相信号入力
GND
PC*
PB*
PA*
RG
MA*
MB*
MZ*
P5
P5
ENCODER
Z相信号入力
3
CN3-3 SYB
PBL
4
CN3-13 SYB*
PZH
18
CN3-4 SYZ
5
CN3-14 SYZ*
PZL
19
※
AC SPINDLE UNIT
MITSUBISHI MDS-B-SPJA
/MDS-A-SPJA
CN2
4
PA
14
PA*
(C)
3
PB
(R)
13
PB*
(B)
2
PC
(P)
12
PC*
(H)
10
P5
(K)
1
GND
20
P5
11
GND
ENCODER
A相信号謬力
ENCODER
B相信号入力
ENCODER
Z相信号入力
CONNECTOR CASE
0V
CABINETの
EARTH PLATEに接続
※
9-17
ENCODER
B相信号出力
ENCODER
Z相信号出力
GND
コネクタ GROUND
CLAMPに接続
(N)
ENCODER
A相信号出力
CN3-1
0V
(A)
ANALOG
速度指令電圧入力
GND
※
AG
ENCODER
A相信号入力
CABLE CN6
20PIN SHIELD CABLE
PG
ALARM
--> OFF
ZS
AC SPINDLE MOTOR
POSITION CODER
SPINDLE故障
出力信号
CN1-5A P24
は TWIST PAIR線を表します
は TWIST PAIR線を表します
付録
15.3 FUJI SPINDLE FRENIC 5000M3との接続
MAIN UNIT
EPS8基板
CNS1
1 VCMD
14
2 PAH
15
3 PBH
16
4 PBL
17
5 PZL
18
6 SRN
19
7
20
8
21
9
22
10 DOCOM 23
11 AL
24
12 SST
25
13
26
AG
+5V
PAL
0V
PZH
0V
SRI
HP26V
(3M26F)
H50F
CABLE CNS1
RST
+24V
COMMON
AC SPINDLE UNIT
FUJI FRENIC 5000M3
CN1
1 ASS1
23 ASM
2
13
24 FWD
3
14
25 REV
4
15
26
5
16
27 RST
6
17
28 SST
7 CM
18
29 SAR
8
19
30 AL
9
20
31
10
11
12
21
22
32
33
34
P
SAR
MAIN UNIT
EPS8基板
CNS1
+24V
*AL
(F44.5)
AL
ALARM
入力信号
SST
(F44.6)
ゼロ速度
入力信号
SAR
(F44.7)
速度到達
入力信号
34
P
11
30
AL
ALARM
出力信号
ALARM
--> OFF
ゼロ速度
--> ON
速度到達
--> ON
SST
12
28
SST
SAR
26
29
SAR
速度到達
出力信号
COMMON
24
RST
22
27
RST
RV
ALARM RESET
入力信号
SRN
6
24
FWD
RV
正転指令
入力信号
SRI
20
25
REV
DOCOM
10
7
CM
RV
逆回転指令
入力信号
RST
ALARM RESET出力信号
(G42.5) RESET --> OFF
SRI
逆回転指令出力信号
(G43.5) 逆転指令 -->
ON
23
ゼロ速度
出力信号
SRN
正転指令出力信号
(G43.6) 正転指令 --> ON
CABLE CNS1P
AC SPINDLE UNIT
FUJI FRENIC 5000M3
CN1
CABLE CNS1
20PIN SHIELD CABLE
0V
注) PARAMETER 9103番を下図のように設定すること
9103
SP1 SP0
1
0
※
POSITION CODER
(旋盤の場合)
ANALOG
速度指令電圧出力
VCMD
1
1
ASS1
14
23
ASM
AG
ANALOG
速度指令入力電圧
0V
コネクタ GROUND
CLAMPにはんだ付け
15.4 FUJI SPINDLE FRENIC 5000MS5との接続
MAIN UNIT
EPS8基板
CNS1
1 VCMD
14
2 PAH
15
3 PBH
16
4 PBL
17
5 PZL
18
6 SRN
19
7
20
8
21
9
22
10 DOCOM 23
11 AL
24
12 SST
25
13
26
AG
+5V
PAL
0V
PZH
0V
SRI
HP26V
(3M26F)
HP20V
CABLE CNS1
RST
+24V
COMMON
AC SPINDLE UNIT
FUJI FRENIC 5000MS5
CN3
1 FWD
11 SST
2 REV
12 SAR
3 RST
13 AL
4 EMG
14 CMO
5 CMS
15
6
16
7 ASS
17
8 ASM
18
9
19
10
MAIN UNIT
EPS8基板
CNS1
+24V
*AL
(F44.5)
15
14
CMO
AL
21
13
AL
ALARM
出力信号
ALARM
--> OFF
SST
22
11
SST
ゼロ速度
出力信号
ゼロ速度
--> ON
SAR
25
12
SAR
速度到達
出力信号
COMMON
24
ALARM
入力信号
SST
(F44.6)
ゼロ速度
入力信号
SAR
(F44.7)
速度到達
入力信号
AC SPINDLE UNIT
FUJI FRENIC 5000MS5
CN3
CABLE CNS1
SHIELD CABLE
20
0V
20
RST
11
3
RST
RV
ALARM RESET
入力信号
SRN
16
1
FWD
RV
正転指令
入力信号
SRI
17
2
REV
DOCOM
2
RV
逆回転指令
入力信号
4
EMG
5
CMS
RV
外部ALARM
入力信号
RST
ALARM RESET出力信号
(G42.5) RESET --> OFF
SAR
SRN
正転指令 出力信号
(G43.6) 正転指令 --> ON
SRI
逆回転指令出力信号
(G43.5) 逆転指令 --> ON
CABLE CNS1P
注) PARAMETER 9103番を下図のように設定すること
9103
SP1 SP0
1
0
速度到達
--> ON
0V
※
POSITION CODER
(旋盤の場合)
ANALOG
速度指令電圧出力
VCMD
14
7
ASS
1
8
ASM
AG
コネクタ GROUND
CLAMPにはんだ付け
9-18
ANALOG
速度指令電圧入力
0V
15. SPINDLE UNITの接続
15.5 POSITION CODER
15.5 POSITION CODERの接続
CABLE CNS1P
SHIELD CABLE
MAIN UNIT
EPS8基板
POSITION CODER
CNS1
PZH
PZL
PAH
PAL
PBH
PBL
+5V
0V
(B)
(P)
(A)
(N)
(C)
(R)
(H)
(K)
18
5
2
16
3
2
15
17
※
コネクタ GROUND
CLAMPにはんだ付け
※
は TWIST PAIR線を表します
*) 20P SHIELD CABLE
*) 長さ MAX 14m
*) +5V および 0Vの電線数は
CABLEの長さが 8m以下の場合3個ずつ使用
CABLEの長さが 8m以上の場合6個ずつ使用
9-19
PG
부록
16. DNC機能
16.1 DNCとは?
通常、NCはその内部メモリに記録されているパーツプログラムを実行しながら自動
運転をします。しかし、それとは異なりパソコンなどの外部機器から通信でパーツ
プログラムを受けながら同時に実行し、自動運転をすることをDNC(DIRECT NUMERICAL
CONTROL)といいます。
金型のような複雑な加工ではふつうCAMでプログラムを作成しますが、その複雑な
加工曲線は直線補間(G01)の微小ブロックをつなげながら作られます。
結果的にプログラムは長くなり、NCのメモリに内蔵できなくなるので、このとき
DNC機能が必要になります。また、DNCで通信で受けたパーツプログラムはブロック
ごとに実行されるたびにNCのメモリから消えてしまいます。
拡大
図 微小ブロック加工例
16.2 DNC運転の準備
1) 通信データの有効範囲
%
;
O0001
(PROGRAM)
G40
………
;
%
有効範囲 (実行対象)
NCは通信で外部機器から受けたデータ中で最初に入ってくる %(END OF
RECORD)コードの後に続く ;(END OF BLOCK)コードの次のデータから2番目
に入ってくる % コードまでを有効範囲とみなします。
9-20
16. DNC 機能
16.2 DNC운전의 준비
2) 通信用標準 PARAMETER
① PCと NCとの通信
NO.0000
<TVC> = 0
(TV CHECK をしない)
NO.0000
<CTV> = 0
(注釈文の TV CHECKをしない)
NO.0000
<ISP> = 0
(PARITY BIT 無し)
NO.0000
<NCR> = 1
(EOB : LF)
NO.0000
<EIA> = 0
(ISO コード)
NO.0020 = 0
(COM1で入力)
NO.0021 = 0
(COM1に出力)
NO.5001 = 1
(NO.5110~5112 PARAMETER群を選択)
NO.5110 = 3
NO.5111 = 2
(STOP BIT数 : 2)
NO.5112 = 11
(9600 BAUD)
9-21
© Copyright 2026 Paperzz