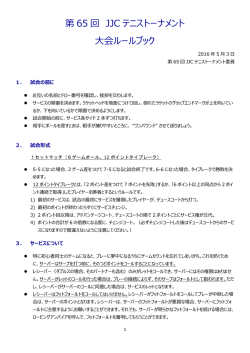
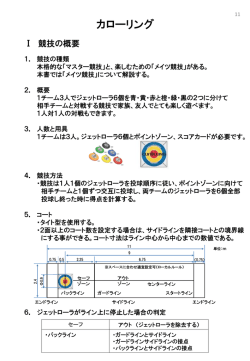
シンポジウム『モデリングが世界をつなぐ!』 ETロボコンにおける制御とモデル (ETロボコンのモデル審査では、どんなモデルを良いモデルと考えているのか) 2011年06月12日(日) 南関東地区大会 審査委員長 アンリツエンジニアリング(株) 林 啓弘 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 1 目次 2010年の総合評価 はじめに 審査基準やドメインを知る どんなものが作られているか ETロボコンに現れる性能 優秀モデルをみる まとめ ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 2 2010年の総合評価 チャンピオンシップ大会 南関東地区大会 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 3 2010年 チャンピオンシップの総合評価 こっぺぱん♪ i-K∀S AEK RUNNER10 明確な相関は難しいが、 左上(モデルのレベルが 低いが走行が早い)や 右下(モデルのレベルが 高いが走行が遅い)などの まったく相関がとれていない チームはごく少数 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 44 南関東地区大会総合評価 2009ー2010 赤い円で囲んだ領域が右上へシフトしている。① モデルのレベルが高いが走行が遅い ② Result Time / Model Point 南関東地区大会2009 総合評価 2010 2009 1 AEK RUNNER10 1 0.9 0.9 0.8 0.8 正 0.7 規 化 0.6 後 の 0.5 競 技 0.4 結 果 0.3 0.7 i-K∀S こっぺぱん♪ ① 0.6 0.5 0.4 0.3 0.2 ② 0.1 ② 0.2 0.1 0 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 正規化後のモデル評価 0.8 0.9 1 0 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 0.1 0.2 0.3 0.4 0.5 境界線 モデル評価・競技結果 0.6 0.7 0.8 0.9 1 5 はじめに ETロボコンのモデル審査では、 どんなモデルを 良いモデルと考えているのか の 前に ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 6 はじめに 参加チームの皆さんはどんなことを考えていますか 審査基準、競技ルールなどの関心事の整理? ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 7 ETロボコン モデル審査基準 http://www.etrobo.jp/2011/gaiyou/model.php 正確性 モデルの書き方 モデルの内容 理解性 設計モデル 図の見やすさ 図の補足 機能 構造 振る舞い 性能モデル 正しく分かりやすく書けているか 要素技術 走行戦略 動作内容とそれを実現するための 仕組みが、正しく、複雑にならな いように検討されているか? 性能向上のための技術や開発方 法が十分に検討されているか? トレーサビィリティ 追加課題 要求モデル 並行性設計 開発支援 設計指針 設計内容 オリジナリティ ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 2011年モデル審査基準 補足資料 8 ドメインを知る ETソフトウェアデザインロボットコンテスト2011 競技規約 組立て手順書 競技ルール 競技フィールド 別冊: Bluetooth通信 NXTway-ET走行体(二輪倒立振子ライントレースロボット) 開発環境・要素技術セミナー資料(実行環境を理解する) 開発環境 要素技術 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 9 やりたいことを考える、色々と・・・① サンプルプログラムだけで大会に参加できるか 無理かな。それより楽しくないな。遊ぼうよ。 ベーシック・ステージを考える ライントレースだけで、いけそうじゃん でも坂道ってポイントないけど、難所らしい。しかも回避できない ラインの黒とコースの白とを見極めればいいよね 先輩から聞いたけど、ラインの淵は白と黒の混ざった色、つまり灰色 の値を検出するらしい。 マーカの色は灰色か・・・ ライントレースをするためには 光センサの値で、白・黒って値を見ればいいんじゃない それよりもライン淵の灰色を閾値として上か下でもいいよね 先輩が、パスファインダー走行体の頃はそれでも良かったけど、 NXTway-ET走行体は光センサが走行体に一体となっているので、 ラインに対して走行体が向きを大きく変えるので遅いらしい。 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 10 やりたいことを考える、色々と・・・② ボーナス・ステージを考える インコースの難所 シーソー 坂道と同じか。ちょっと違うな。勾配がきついんじゃない 角度を計算すれば。三角関数か。斜辺と高さが分かってるから それに板自体の厚みが14mmあるが、簡単の登れるの? 倒れたり、登りあがっても、向きが斜めになっていれば落ちるな でもそのためにラインあるじゃん シーソーダブルって、シーソー上で往復してパタパタ 階段 同じ材質の板。板自体の厚みは14mm。 2回段差を上ったら、2枚分の厚みを降りる。 降りた瞬間バランスを崩さないようにしないと・・・ アウトコースの難所(省略) 難所に共通 難所の手前にマーカがある ガレージ 走行体との隙間はどれだけかな マーカ判別できれば、なんとかなるかな。でも・・・ ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 11 やりたいことを考える、色々と・・・③ 走行体(NXTway-ET) 各種センサ モータ 組立て手順書より 尻尾用モータ?何に使うの? 重さは 去年より重くなってそうだね 乾電池 ジャイロセンサ モータ モータ 超音波センサ タッチセンサ モータ シッポ 光センサ コンピュータ (入出力ポート、 LCD、SW) ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 12 やりたいことは 坂道 シーソー ガレージ 階段 ルックアップゲート ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 ETタックル 13 ここまででどんなものができているか① 単なるメモ? マインドマップやその他により整理されている? 関心事は 要求は 要件は 知識の有無は?何を調べる? リスクは何? 難所、ライントレース、開発環境 メンバーの力量、チャレンジする新しい取り組み ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 14 マインドマップの例 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 15 さて、ここから・・・ コンセプトシートを利用するとか 戦略とか戦術とか ベーシックステージはどこよりも速く、ボーナスステージ はすべての難所を通過しガレージポイントもゲットする。 戦略 特定の目標達成のために、総合的な調整を通じて 力と資源を効果的に運用する 戦術 ある目的を達成するための具体的な方法・手段 分析 速く走行するためPID制御、 難所通過を成功させるための物体検知、衝突検知 ゴール指向分析、ユースケース分析、ミスユースケース 分析、フィーチャ分析、ソフトウェア品質特性(非機能)、 なぜなぜ分析など 正常処理だけでなく、 メタファ、アナロジー 異常とか例外とか代替とか SysMLやその他 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 16 さて、ここから・・・ 設計 機能、構造、振る舞い ドメインに見い出せる「もの・こと」を特定している(分解) 特定したものは、整理されている(分類) 整理された「もの・こと」で構成されている(組立て) 構成されたもので振る舞いが確認されている(検証) ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 17 ここまででどんなものができているか② 分析 設計 機能、構造、振る舞い 調査 分析関係のモデル マインドマップなど 非機能要件定義 その他 センサー特性 要素技術 計測 データ これらの文書からチームとして表明 したいことは何か。 戦略、戦術を言い当てるものをモデ ル図5枚に、どのように小間割をするか 考える。これはプレゼンテーションの デザイン能力。視線の動線、審査基準 と読み手を考える。 命名はその名称でそのものを想起さ せるものと考えること。そうしないと ミスリードの元となる。 クラスにはクラスの責務として必要 な属性や操作を記載する。関連端名、 多重度、誘導可能性を記載する。 モデル図5枚中でトレーサビィリティ が取れているように再確認すること。 ETロボコンに現れる走行性能も 表明されているか ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 18 ETロボコンに現れる走行性能 ライントレースの走行性能には ライントレース以外の走行性能って 自己位置推定(オドメトリ手法) 自己位置補正 直進(前進・後進)性能 旋回性能 仮想ライン 難所の走行性能では シーソー、階段 ・・・衝突検知、段差検知、他 ルックアップゲート・・・? ETタックル ・・・? 転倒時モータ停止(フェールセーフ) 高速走行 ・・・PID(PD)制御 マーカー検知 エッジ切替 コースアウトからの復帰走行 外乱対策 ・・・ローパスフィルタ(移動平均)、まいまい式 その他 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 19 南関東地区大会のモデル図に表明された内容 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 20 南関東地区大会2010 優秀モデル エクセレント・モデル 神奈川工科大学 吉野研究室 結果: こっぺぱん♪(神奈川県厚木市) 南関東地区大会独自競技 0-400cm 最速7.15秒 イン(中間ゲート、ミステリーサークル、ゴールゲート通過)成功 アウト(中間ゲート、シーソー、階段通過)リタイア チャンピオンシップ大会 総合2位:モデル図 B+ /競技2位 ゴールド・モデル シーソー上バランス (停止)する BERMUDA(神奈川県川崎市 ) 株式会社 富士通コンピュータテクノロジーズ 結果: イン(中間ゲート、ゴールゲート通過、ガレージイン成功)成功 アウト(中間ゲート、ゴールゲート通過)成功 チャンピオンシップ大会走行結果 イン(中間ゲート、ミステリーサークル、ゴールゲート通過、ガレージイン)成功 アウト(中間ゲート、シーソー、階段通過、ゴールゲート通過、ガレージイン)成功 シルバー・モデル AT車限定B(神奈川県横浜市) 富士ゼロックスアドバンストテクノロジー株式会社 結果: イン(中間ゲート通過)、アウト(中間ゲート、シーソー通過)ともリタイア ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 21 チャンピオンシップ大会2010 総合優勝チーム のモデル図 AEK RUNNER10 (神奈川県厚木市) アンリツエンジニアリング(株) チャンピオンシップ大会 総合優勝:モデル図 A- /競技1位 結果: イン(中間ゲート、ミステリーサークル、ゴールゲート通過、ガレージイン)成功 アウト(中間ゲート、シーソー、階段通過、ゴールゲート通過、ガレージイン)成功 南関東地区大会 総合優勝:モデル図 A /競技1位 結果: イン(中間ゲート、ミステリーサークル、ゴールゲート通過、ガレージイン)成功 アウト(中間ゲート、シーソー、階段通過、ゴールゲート通過)成功 シーソー上停止はしない ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 22 チャンピオンシップ大会2010 総合3位チーム のモデル図 i−K∀S(神奈川県横浜市) (株) 日立アドバンストデジタル チャンピオンシップ大会 総合3位: モデル図 A- /競技4位 結果: イン(中間ゲート、ミステリーサークル、ゴールゲート通過、ガレージイン)成功 アウト(中間ゲート、シーソー、階段通過、ゴールゲート通過、ガレージイン)成功 南関東地区大会 総合準優勝: モデル図 A /競技2位 結果: イン(中間ゲート、ミステリーサークル、ゴールゲート通過)成功 アウト(中間ゲート、シーソー、階段通過、ゴールゲート通過)成功 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 23 チャンピオンシップ大会 モデル部門 エクセレント・モデル HELIOS (株)アドヴィックス 愛知県刈谷市 (東海地区) インコース:ミステリーサークル通過後リタイア アウトコース:シーソー、階段、ゴールゲート通過 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 24 まとめ モデル評価基準に沿っているか 要求をどのように分析して要件を定義しているか 要件を実現するためにどのように設計しているか 当該性能を確実にするため要素技術を特定し、どのように実現しよう としているか、設計に取り入れているか 倒立振子状態を維持しながら・・・ 分析・設計は当該記法で正確に記述されているか 正常処理だけでなく異常・例外・代替処理があり、性能を確実にしよ うとしているか、引き出しているか、妥当性はあるか トレーサビィリティは取れているか その他 ミスリードさせない。 視線の動線。モデル図の使い方。色分けによるグルーピング オリジナリティ ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 25 ETロボコンのモデル審査では、 どんなモデルを 良いモデルと考えているのか コンセプトシート、モデル図5枚、そして審査 基準を満たすという制約の中で、走行や難所 攻略の実現可能性を秘めて、競技部門で躍動 するNXTway-ETが見られるだろうモデル図。 というか躍動するNXTway-ETが見たい! ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 26 南関東地区大会 モデル事例研究 2011年6月18日(土) 12:45モデリング事例1(講演30分、質疑応答10分) チーム『AEK RUNNER10』 アンリツエンジニアリング株式会社 宮崎 泰貴様 リスクの認識と対策:マインドマップ、ミス・ユースケース、ゴール分析と 機能面、性能面とのトレーサビィリティ 13:25モデリング事例2(講演30分、質疑応答10分) チーム『BERMUDA』 株式会社 富士通コンピュータテクノロジーズ 辻村 浩史様 派生開発と性能維持あるいは性能改善と性能追加 14:15モデリング事例3(講演30分、質疑応答10分) チーム『H22』 キヤノンソフトウェア(株) 並川 太俊様 並行処理への実現のメカニズムの記述とエラーの回避の表明 14:55モデリング事例4(講演30分、質疑応答10分) チーム『i-K∀S』 株式会社日立アドバンストデジタル 赤木 正慶様 シナリオ設計による拡張性、追加の容易性 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 27 おわり シンポジウム『モデリングが世界をつなぐ!』 ETロボコンにおける制御とモデル (ETロボコンのモデル審査では、どんなモデルを良いモデルと考えているのか) 2011年06月12日(日) 南関東地区大会 審査委員長 アンリツエンジニアリング(株) 林 啓弘 ETロボコン2011南関東地区スペシャルセミナー資料/ETロボコン南関東地区大会実行委員会 28
© Copyright 2026 Paperzz