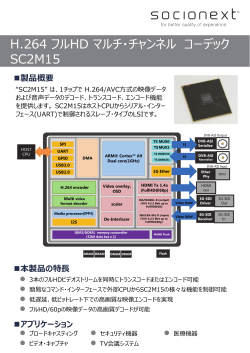
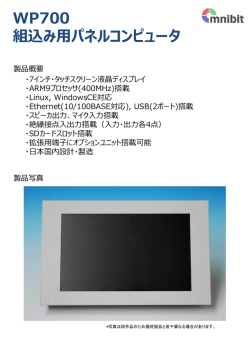
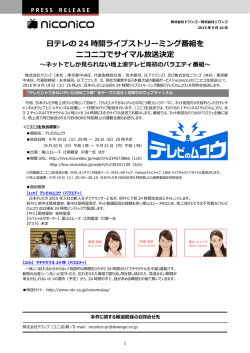
データ収集ウィンドウの「MIMO」の設定について データ収集ウィンドウのスプレッドシートに「MIMO」の設定が加わりました。これにより、加振 点移動試験で収集した伝達関数について DOF を前後スワップが必要なくなります。 −背景− 従来(Ver.4.00.67 まで)は、伝達関数等のクロスチャンネル測定の際に参照点のデータが自動的に 分母として扱われていました。そのため、加振点移動測定の場合でも加振点を参照点とせざるを得 ず、この事が後で DOF を入れ替える必要性を生み出していました。 今回 MIMO の設定を導入することにより、参照点/応答点とは独立に Input(加振)/Output(応答) を選べるようにしました。これにより加振点を必ずしも参照点にする必要がなくなり、上記のよう な不都合が生じなくなりました。 新しいデータ収集ウィンドウの仕様では、大まかな測定準備の設定手順は以下の通りです。 1.スプレッドシートの設定(チャンネルごとの設定) 2.測定セットの作成(複数回に分けて測定する場合に、移動点の DOF を自動でインクリメントし ながら 1 回目の測定の設定内容をコピーして複製します) 3.測定データの種類・方法の設定(ハードウェアの設定) ② ③ ① 以下、1.スプレッドシートの設定、2.測定セットの作成について詳しく説明します。 1 1.チャンネルスプレッドシートの設定 Setup(チャンネル設定) チャンネル:ON(使用する場合)/OFF(使用しない場合)。 Signal:バーメーターです。黄:25%以下、緑:25∼90%、赤:90%以上 カップリング:AC/DC から選択します。 センサー:ICP 型センサーの電源供給 on/off を決定します。電流量の選択がある場合はあわせ て選択してください。 ADC:AD コンバータの電圧レンジです。 MIMO:そのチャンネルが Input(入力:加振)/Output(出力:応答)の選択です。伝達関数を 計算する場合、Input が分母、Output が分子に用いられます。ハンマーや加振器のロー ドセルは Input、応答を測定する加速度計などは Output を選択して下さい。 NOTE:ハンマー移動試験で収集した伝達関数の DOF スワップが必要なくなります。 単位:各チャンネルの工学単位を入力します。伝達関数を計算する場合、力の単位にしないと 計算結果の測定タイプが“伝達率”になってしまうのでご注意ください。 校正値:センサーの校正値を入力します。 校正値単位:EU/V、EU/mV、V/EU、mV/EU の 4 種類(V⇔mV の切替は、データ収集ウィン ドウの File|Option(ファイル|オプション)を実行して、チャンネルタブの欄で「Sensor sensitivity in mV」にチェックをします。 ウィンドウ:レクタンギュラー、ハニング、フラットトップ、フォース、レスポンスの 5 種類 ハンマリングの場合にレクタンギュラーかフォース/レスポンスの組み合わせ、 ODSFRF の場合にはハニング、フラットトップなどを適宜使い分けます。 ウィンドウ値:フォースウィンドウはダブルハンマリングをキャンセルします。値の意味は、 2 番目以降のインパルスの MAX に対するパーセンテージです。これを超えると ダブルハンマリングと判定します。レスポンスウィンドウの場合、ウィンドウ 値の意味は、ウィンドウ終端での元の時刻歴波形に対する倍率です。 2 Measure(測定用設定) 表示: EU(校正値を掛けた値) 、Volts(電圧出力値そのもの) Roving/Reference:Roving(移動点)、Reference(固定点) Point Number:測定開始 DOF の番号 Point Direction:測定開始 DOF の方向 インクリメント DOF: on(移動点)、off(固定点) インクリメント(ポイント番号): 次の測定セットの番号増分 インクリメント(方向): 次の測定セットの方向 NOTE : チャンネルスプレッドシートに表示されていない項目がある場合、以下の手順で表示させて下さい。 • チャンネルスプレッドシートのヘッダー部を右クリック(下記参照) • Data Block Options ダイアログの必要な項目をチェック。 ヘッダー部 Data Block Options ダイアログ 3 ハンマーと1軸センサー使用、センサー移動測定の設定例 ・1ch にハンマー、2ch にセンサーを接続 ・ハンマー入力は常に同じ DOF(1Z)、センサーは測定ごとに DOF を移動(1X、2X、3X、・・・) ハンマーと1軸センサー使用、ハンマー移動測定の設定例 ・1ch にハンマー、2ch にセンサーを接続 ・ハンマー入力は測定ごとに DOF を移動(1X、2X、3X、・・・)、センサーは常に同じ DOF(1Z) 4 ハンマーと3軸センサー使用、センサー移動測定の設定例 ・1ch にハンマー、2、3、4ch にセンサーを接続 ・ハンマー入力は常に同じ DOF(1Z)、センサーは測定ごとに DOF を移動(1X、1Y、1Z、2X、2Y、 2Z、3X、3Y、3Z、・・・) 5 2.測定セットの作成 チャンネルスプレッドシートの設定が終わったら、次にそれを測定セット数分コピーします。 • データ収集ウィンドウで、Measurement set | Number of meas set(測定セット|測定セ ット数)を実行して下さい。 • ダイアログボックスに全測定セット数(注:測定点数ではありません)を入力して下さい。 全測定セット数分のチャンネル設定がコピーされます。 以下、ハンマーを 1ch で固定点(点 1 の Z 方向)、加速度センサーを 2ch で移動点(点 1∼10 の Z 方 向)として 10 回測定する場合(つまり一点参照のハンマリング試験)を例にして、DOF の設定方法を 説明します。 • MIMO の欄は 1ch:input(加振)、2ch:output(応答)にして下さい。 • Roving/Reference は 1ch:Reference (固定点)、2ch:Roving (移動点)に設定して下さい • Point Number/Direction は測定開始時の DOF を入力して下さい。 • インクリメント DOF は固定点 ON,移動点 Off です。 • インクリメント(ポイント番号・方向)は、固定点に関しては必要ありません。 • Measurement set | Number of meas set(測定セット|測定セット数)を実行して、測定セ ット数を 10 と入力して下さい。 以上で全測定セットの測定準備ができました。 6
© Copyright 2026 Paperzz