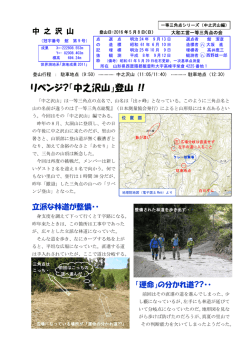
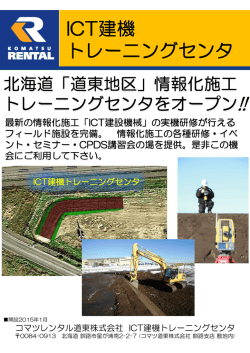
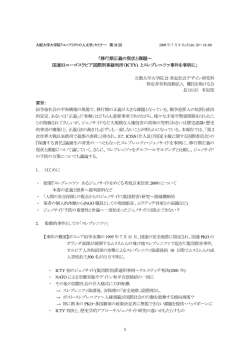
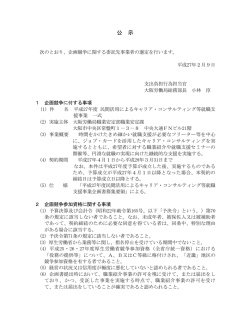
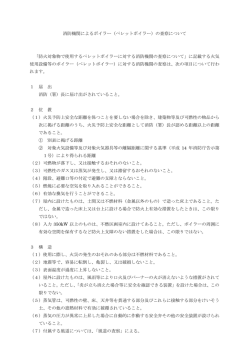
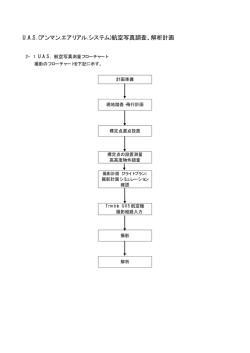
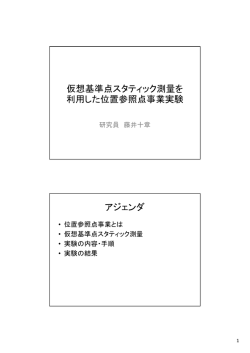
2003 年 9 月 APA No.85-4 財団 法人 日本測量調査技術協会 第25回 技術発表会論文特集 4.VRS方式による公共基準点測量 および精度評価の新方法 呉 新 華* 1. はじめに 仮想基準点(Virtual Reference Station, 以下VRSと呼ぶ。 )方式によるRTK-GPS測位に ついて、国土地理院及び日本測量協会によ るこれまでの公開実験では、VRS方式システ ムの検証やリアルタイム測位精度の評価、 そして技術的な課題と対応する方法などの 調査が行われた。 当社では、公共基準点の測量において、 VRS方式の有効性・実用性および測位精度を 検証し、実際のフィールド観測における問 題点などを確認した。その結果に基づいて、 VRS方式によるRTK-GPSの精度評価について、 新しい測量方式を提案し、その有効性を確 認した。 本稿は、VRS方式による公共基準点測量の 実証実験結果および精度評価の新方法につ 表−1 三 島 研 二* 笹 川 三 島 義 徳* 橘 菊 生* いて報告する。 2. 実証実験の概要 VRS方式による公共基準点測量は、大阪府 豊中市の公共基準点を借用して実施した。 測位結果および精度を検証するため、いく つかの異なる条件での実証実験を実施した。 なお、全路線各点の毎回の観測では、連続 20エポックの平均を1セットとするほか、一 部では連続60エポック測位結果も取得した。 3. 実験結果 観測結果をまとめたものが表−4(上段: 平均値;下段:標準偏差)である。表によ り、結果全体については以下ような結論が 得られる。 豊中市での実証試験方法等 実 施 日 時 平成 15 年 1 月 27 日(月)∼ 31 日(金) 対 象 地 域 大阪府豊中市市街地(向丘・春日町周辺 500m×500m) 図-1 参照 計測用公共基準点 3路線(Ⅰ,Ⅱ,Ⅲ)における3,4級基準点計 32 点 図-1 参照 シ GPSnet(トリンブル社)による JENOBA 配信 ス テ ム 使用の電子基準点 堺,猪名川,大津2,神戸中央,箕面 使 Trimble 5700・TSC1,Leica SR530・TR500;J-Phone 携帯電話 用 機 材 正* −46− 図-2 参照 図−1 実験の対象地域および使用した公共基準点(大阪府豊中市市街地;3,4級基準点計 32 点) 表−2 計 衛 測 星 仰 豊中市での実証試験の観測の手順等 点 各路線で公共基準点の重複(往復)観測 角 ≧10° (配信システム ・ rover(以下「ローバ」と呼ぶ.)) 20 エポック平均/1 セット 制限値: 連続独立 60 エポック測位 制限なし 大小三角網による観測 大三角網(電子基準点:堺,猪名川,大津2) (平均基線長 55Km) 図-2 参照 PDOP≦4, H≦±20mm, V≦±30mm 小三角網(電子基準点:堺,神戸中央,箕面) (平均基線長 34Km) −47− 図−2 実験現場および使用した電子基準点位置図 (最寄り電子基準点との距離:小三角網∼ 4.4 km;大三角網∼22.9 km) 表−3 豊中市での実証試験で用いた配信データ,機種等 新 旧 座 標 に よ る 観 測 電子基準点測地成果 2000 電子基準点最近の日々の座標値 従来の RTK 方式 配信データ: RTCM2.2 Type 1,3,16,18,19,22 測 位 方 式 VRS による RTK 方式 配信データ: RTCM2.2 Type 1,3,16,18,19,59 機 種 別 に よ る 観 測 Trimble 5700 , Leica SR530 −48− 1) 実証実験より良い結果が得られた。 VRS方式による測位の標準偏差は、水平 って結果に同様の異常が見られた。 3) 小網(最寄り電子基準点:箕面)に 2cm前後、高さ3∼4cmの精度であっ おけるVRSと箕面を基準局とするRTKの た。 結果がよく似ている。両者の測地成果 2) 特定の観測点では、周囲の観測環境 (カーブミラー、建物、標識など)によ 表−4 実証実験結果集計表 −49− による観測結果は公共基準点成果値と 最も一致する。 (単位mm) 電子基準点座標として「最近座標」を い( 「最近座標」と「測地成果」 )による 使った場合、網や機種に関係なく測位結 観測結果の差は、路線や機種などに関係 果(特に南北成分)に系統差が見られる なく、各測位成分でほぼ一定である。さ が、その原因は主に電子基準点の新旧座 らに詳細に比較すると、北距(X)、東距 標における全体的なずれによるものと考 (Y)と標高(H)方向三成分の較差平均値 4) は、大網における最寄りの電子基準点で えられる。 地殻変動の速度場が非一様性であるた ある「猪名川」の( 「最近座標」−「測地 め、測位結果が電子基準点の「測地成果」 成果」 )座標差に相等していることが分か によって成果2000に回帰させてもシフト る。 5) 「小網」において、電子基準点座標の違 後の系統誤差が存在する。この差は網の 大きさによって大きく変化する。 いによる観測結果の差は、路線や機種な 本実験のVRS方式による測位結果の精度 どに関係なく、各測位成分ともほとんど について、これらの図の統計結果により、 一定である。 「大網」の際と同様の比較を 水平成分の標準偏差は、東西方向はいずれ すると、北距(X)、東距(Y)と標高(H) も2cm以内となっており、南北方向は2cm 方向三成分の較差平均値は、小網におけ をやや超える程度である。高さ方向の標準 る最寄りの基準点である「箕面」の( 「最 偏差は約3∼4cmである。市街地でのVRS 近座標」−「測地成果」 )座標差と一致し 方式によるRTK-GPS観測であると同時に、半 ていることが分かる。 「大網」と「小網」比較の結果により、 分以上の観測点では(カーブミラーや電 柱・標識・街路灯・建物などによる衛星電 VRS方式を用いる測位観測では、最寄りの 波の)マルチパス影響、建築物による受信 電子基準点が観測結果へ最大の影響を及 する衛星視界の影響などのこともあり、よ ぼすことが確認できた。 くない観測条件における実験であったこと 4.2 電子基準点網による結果の比較 を考えると、場所環境によっては若干の精 「小網」と「大網」による観測結果によ り、電子基準点が同じ「測地成果」を使 度改善が可能と思われる。 測位結果にもたらす不安定性は、実は衛 っても、電子基準点網の形状/大きさが 星の配置、電離層・水蒸気の分布および変 異なるだけで、測位3成分にそれぞれ一 動、そして局地的な観測条件(上空視界、 定のバイアスを生じたことがわかる。ま 電波妨害・反射)などの時間と共に変化す た、地殻変動によって電子基準点位置が る性質によるものである。これら(単独或 変動しており、しかもその変動速度場が いは同時)の影響によって、VRS方式測位結 均等でないため、現在の測位結果を電子 果の再現性が低下させられたと考えられる。 基準点の「測地成果」によって成果2000 にシフトさせる場合、位置座標の不整合 4. 結果の比較 各路線の全観測点に対し、いくつかの異な る条件における実験の測位結果の間にどの ような関係あるのかを検証するとともに、そ の関係がどのような意味を持つのかを考察 するため、各観測内容について、ある「同条 件」に基づいて異なる観測結果を比較する。 4.1 電子基準点座標による結果の比較 「大網」において、電子基準点座標の違 −50− と地殻変動の歪みによる誤差が残る。さ らにこの残差は網が大きいほど大きくな ることが考えられる。 「最近座標」を電子基準点座標として使 用した場合、 「小網」と「大網」による測 位結果の差は全体的に小さいが、高さ成 分ではまだマイナス数cmのバイアスがあ る。この網による差異は、前述と同様、 二つの基準点網における最寄り点の座標 不整合性が主な原因であると考えてよい。 とした。その結果、安定しているときはス 「測地成果」を使った場合に比べ、 「最近 タティック方式に匹敵するほど±20mm程度 座標」でのこの差が小さい理由として、 の高精度の測位結果を得ることができた。 実験での測位結果は「最近座標」による しかし、衛星の配置が変わるとき、すなわ もので、測地成果2000にシフトさせる必 ちDOPが大きく変わるとき、測位結果の精度 要がないため、地殻変動による残差が生 が劣化することが確認された。 じないためと推測される。 VRSによるRTK-GPS測量方式は、ローバの 4.3 VRS方式と従来のRTKによる結果の比較 近傍に計算上の基準局を仮想し、そこから 「測地成果」を使った電子基準点につ の補正データを転送する。したがって、基 いて、 「小網」のVRSによる観測結果と従 準局からのローバまでの距離の制限を解決 来のRTKによる観測結果の差から、機種に できる方法であることが特徴である。とこ よっては多少の違いはあるものの、VRS ろが、実証試験を重ねた結果、RTK-GPS測量 と従来のRTK両方式による観測結果は同 方式で問題となった、基準局からローバま 等で、その差はきわめて小さいことがわ での距離が10km以上ではスタティックの値 かる。この要因の一つは、小網(神戸中 に対して不安定であることが解消されてい 央・堺・箕面)におけるVRS方式測位の場 る、とは言い難いのが現状である。 合、最寄り電子基準点は従来のRTK方式の この劣化の原因は、定点観測することに 基準局と同じ電子基準点「箕面」である よって、劣化したときのDOPの変化と、その ことがあげられる。さらに、VRS測位の小 劣化した傾向が毎日4分ずつ進むことから、 網が小さい(平均基線長34km)うえ、最 衛星の配置に起因することが確認できる。 寄り基準点「箕面」までの距離が4。4km したがって、VRSによる測量方式は高精度な と近く、VRSの原理から考えると、この時 測位解を安定して得られるとは限らない。 の観測が実際には従来のRTKと相当近い しかし、大枠のGPSの連続観測固定点網が 条件であり、ほとんど「箕面」のみに依 整備されていればローバ1台で測量可能で 存していたと言える。 あり、安定しているときはスタティック法 4.4 異機種による観測結果間の比較 の測位解に非常に近い高精度の測位解が短 Trimble とLeica 両機種による各観測 時間で得られる利便性は捨て難い。特にわ 条件で得られた結果について、両者の差 が国のように国土地理院によって全国に渡 が観測条件によってばらついていること って高密度に連続観測固定点網が整備され がわかる。「大網」 (測地成果)による観 た電子基準点網は世界的にも例がなく、こ 測と従来のRTKによる観測の結果での差 れほどのGPS測量のインフラを利用するた が一番大きい。前者は網基線が長いため めにVRS方式によるRTK-GPS測量は最適の方 測位精度が比較的悪くなっており、後者 法であることは確実である。 の方が機種によるRTK結果の違い(特に高 上述のことにふまえて、VRS方式の特性を さ)があった。しかし、全体および平均 理解して精度が良好である測位結果を採用 値を見る限りでは、異機種間の顕著な較 すればよく、精度の点検を組み込んだ測量 差はないと思われる。 方式を考案すればよい。そこでVRS方式によ るRTK-GPSの結果とトータルステーション 5. VRSによるRTK-GPS測量の精度評価 本実証試験では、位置情報サービス事業 者が提供するデータ配信サービスによる VRS方式RTK-GPS測量方式の精度評価を目的 (以下「TS」という。 )を組み合わせた新測 量方式を提案し、その有効性を確認した。 VRSによる測量方式は測地的な位置関係 が得られるが、その精度が不安定であるな −51− VRS-RTK 測量方式 TS 測量方式 測地的絶対位置が得られる 相対的位置関係が得られる 測位解の精度が不安定 精度は幾何学的に決まる 精度の確認 異なる方式でクロスチェック 既知点が与えられるので相対的な観 測網に絶対座標を与えることが可能 VRS間の測位解の相対的位置関係 をTSの多角方式の閉合差で点検 VRS-TS 測量方式 互いの短所を補う方式ではなく,VRS方式の 精度評価にTS方式を積極的に利用した結果 視通の困難な地域での 測量でGPSを有効に利用する 上空の開きのない地域での 測量をTSを有効に利用する 図−3 精度検証①igr VRS による RTK-GPS 測量方式の精度評価方法としての VRS-TS 測量方式 らば、精度向上の研究などは引き続き必要 の相互の利点、欠点を補う方法として、こ であるが、不安定であることを前提に、測 れまでGPS測量とTS測量の混合測量として、 量方法に精度を確認するシステムを組み込 主に厳密測量網平均計算で重量の設定の方 めばよい。このシステムとして、TS測量方 法が研究されてきたが、現在まで結論に至 式を用いて、VRS方式によるRTK-GPS測量で っていない。 得られた基準点(以下「VRS新点」という。) VRS-TS測量方式では、互いの短所を補う 間をTSによる多角測量方式(以下「TS測量 ためにVRS新点の結果をTSの多角測量方式 方式」という。 )で結合した閉合差で点検す で結合するのではなく、VRSによるRTK-GPS る方式を採用した(以下「VRS-TS測量方式」 測量方式の精度評価にTS測量方式を積極的 という。) 。 に利用し、異なる測量方式での精度評価を GPS測量は測点間の視通を必要としない 行うことが第一の目的である。その結果、 が、上空が開けていなければならない。一 両方式の欠点を補うことができるようにな 方、TS測量は上空の開きは必要としないが、 った。 測点間の視通がなければならない。これら −52− 電子基準点 電子基準点 VRS観測 VRS新点 TS観測 TS新点 VRS新点 TS新点 TS新点 既設点 (1) TS新点 既設点 測量該当地域近傍の 既設点をVRS-RTK観測し, 既設点成果とVRS成果を 比較し,既設点との整合 性を検討評価する TS新点 TS新点 VRS新点 TS新点 TS新点 TS新点 TS新点 TS新点 VRS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 TS新点 (2) 既設点 既設点 既設点との整合性に TS新点 TS新点 VRS新点 問題があるときは, 近傍の既設点3点以上を VRS-RTK観測し, それらから変換パラメータ を求め,VRS新点を座標 変換する 電子基準点 VRS-TSの概要①.igr 電子基準点 図−4 VRS-TS測量方式の説明図 −53− 6. まとめ 1) VRS方式によるRTK-GPS測量の精度 VRS方式による測位結果の標準偏差は、 水平2cm前後、高さ2∼4cmの精度で あった。観測条件がよくない市街地で のVRSによるRTK-GPS観測であるため、 場所環境によってはこの精度が若干向 上する可能性はある。 2) 電子基準点の座標の影響 電子基準 点座標値による観測結果の較差は、い ずれも当該VRS網でローバの最寄りの 基準点における対応する座標値の差と 一致する。 また、大/小三角網による 結果の差は、二つのVRS網における最寄 り点の座標不整合性が主な原因である と考えられる。 これらより、VRS方式 の測位観測では、最寄りの基準点によ る結果への影響が最大であることが示 された。 3) 電子基準点網の大小の影響 全体の 実験結果により、小さい電子基準点網 での観測は比較的安定した結果が得ら れた事がわかる。 小三角網(最寄り電 子基準点:箕面)におけるVRSと箕面を 基準局とするRTKの結果がよく似てお り、両者の「測地成果」による観測結 果は公共基準点の成果値と最も一致す る。 4) 誤差の原因 衛星の配置状態により、 精度劣化やフィックス解が得られない 時間帯があり、特定の観測点では、周 囲の観測環境(カーブミラー、建物、 標識など)によって測位結果に同様の 異常が見られた。 5) GPS測量機による差 実証実験で得 られた測位結果の全体および平均値を 見る限りでは、機種間の顕著な差は見 られなかった。 6) 既設基準点との整合性 既設基準点 との整合性はアフィン変換で処理する ことが有効である。ただし、変換パラ メータを求めるために用いた既設基準 点を中心付近に偏せた場合、整合性が 劣化する。したがって、変換パラメー タを求める既設基準点は、測量該当地 域に均等に配点することが必要である 7) VRS方式によるRTK-GPSの精度評価 VRSによるRTK-GPS測量の測位結果を既 知点として、フリーネットワーク解法 に よ る 変 位 ベ ク ト ル を VRS に よ る RTK-GPS測量方式の精度評価にする方 法は有効である。また、誤差楕円によ る精度評価も有効である。 謝 辞 最後に、本実証実験の実施にあたって、 下記の皆様にご参加いただき、さらにVRS によるRTK-GPS測量用の機材および補正デ ータなどあらゆるご協力とご支援をいただ きました。ここに深甚なる謝意を表する次 第です。 ライカジオシステムズ 株式会社 成田貢市郎様、三友祐子様 株式会社 ニコン・トリンブル(トリンプル ジャパン 株式会社) 永井知子様 株式会社 ジェノバ 木元昭則様、迫 謙一様 また、公共測量基準点の測量および成果 の使用をご許可頂いた「豊中市役所 土木部 道路管理室」の皆様に厚く御礼を申し上げ ます。 本稿では、国土地理院より提供いただい た電子基準点「日々の座標値」を使用いた しました。ここに記して深謝を申し上げま す。 −54− (*株式会社パスコ)
© Copyright 2026 Paperzz