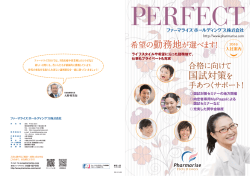
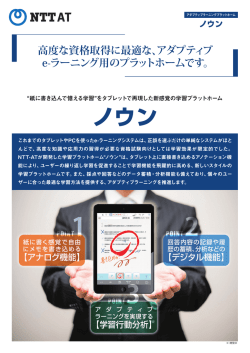
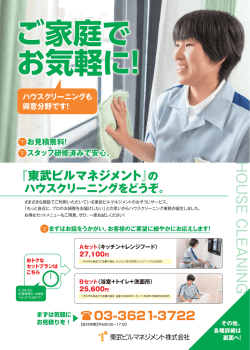
災害対応ロボットを操作しやすく するためのインターフェース 会津大学 深谷友祐 1 動機 災害対応ロボットを開発 (福島県内の企業+会津大学) • アイザック (会津若松市) • 栄製作所 (南相馬市) • TH放電 (喜多方市) • 会津大学 ← インターフェース開発を担当 • 写真のようなロボットを遠隔で操作する際、周囲の 状況やロボットそのものの状況を知る必要がある。 2 関連研究 東京大学 山下・淺間らによる 全方位俯瞰画像の提示システム 「全方位画像」を用いて上方からの俯 瞰画像を提示する 京都大学 松野らによる 過去画像システム 「過去画像」の整合及びロボットの位 置推定を行い、ロボット本体をCGとし て画像中に提示する 3 目的 • ロボットが進む方向は主に前方 画像ははっきりとした奥行情報 を持っていない。 ロボット前方のカメラで撮影し た画像から三次元空間にポリ ゴンを生成し、その面に元画 像をテクスチャとして貼ること により、奥行を提示したい。 4 Free view‐point TVについて 会津大学 岡、矢口らによるFree view‐point TVシステム • 2DCDPによる画像間のマッチング • 因子分解法による形状復元 ポリゴンの生成 生成されたオブジェクトは 視点移動可能 ポリゴンに元画像をテクス チャとして貼り付ける 5 2DCDP 2DCDP • 会津大学 岡、矢口らによる • 2次元画像間の全ピクセルについて最適対応がとれる • SIFT等の従来手法より対応点が多くとれる 6 因子分解法 因子分解法(正射影モデルの場合) • 対象物に対して相対運動するカメラで撮影した 枚の時系列画像を考え、1 枚目から特徴点を 点抽出し、その動きを追跡する。 , で定義する。 行列 を、特徴点 の 枚目の画像上での位置 • また、 の各行の平均を求め の各要素から引いた計測行列 を作る。 , , , • • • ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ̅ ⋮ ̅ ⋯ 1 ⋯ 1 は2 3の行列 と3 の行列 を用いて のように分解でき る。Free view‐point TVシステムでは固有値分解に特異値分解の手法を用 いている。 はカメラの運動情報のみ、 は物体の形状情報のみが含まれる。 と を一意に求める為には画像が3枚以上必要 → カメラが3台ある 7 魚眼カメラの使用 災害対応ロボットには8台の魚眼カメラが搭載されている。 • NM33‐Nを使用 • カメラ内部で魚眼画像→透視投影画像への展開可 仮想的なパン、チルト、ズームが可 能であるカメラとみなすことができる。 実際に可動部があるわけではない ので、故障が少ないと考えられる。 範囲を決めて透視投影 画像に展開 魚眼画像 8 Free view‐point TVによる三次元復元 <データセットA> <データセットB> 仮想的に光軸を平行にし、 画像の重複領域を多くした 左 中央 右 光軸はもとのカメラ方向のまま で、重複領域は左に比べ少ない 左 中央 右 ロボットを5cm前進させる毎に、 撮影を繰り替えし20回(1m前 進分)画像を取得した。 9 異なる撮像領域のデータセットの復元 の比較 <データセットA> 画像間で重複する領域が多く、ポリゴン生 成はより密であると感じた。 <データセットB> 画像間での重複は左に比べれば少なく、画 像外側部分がフラットであると感じた。 • 画像間の重複領域を多くした場合とそうしない場合 で復元を行い比較をしたが、周囲の障害物配置の 認知はほぼ同程度であった。 10 まとめと今後 • ロボットの前方のカメラによって取得された画像から奥行情報 を提示する為に、Free view‐point TVと呼ばれる手法を適用した。 • 三次元復元結果の提示が出来た。 • ズームによって着目したい物体を撮像領域に大きく映るように することにより画像間での対応点が増え、より密なポリゴン生 成ができると考える。今後その条件で復元を行い、周囲の障害 物配置の認知の評価を行いたい。 11
© Copyright 2026 Paperzz