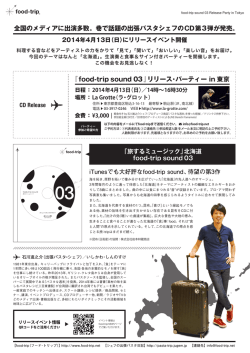
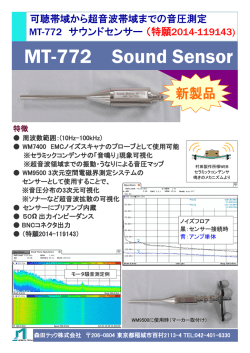
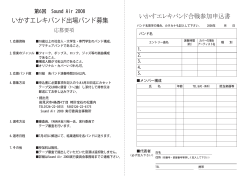
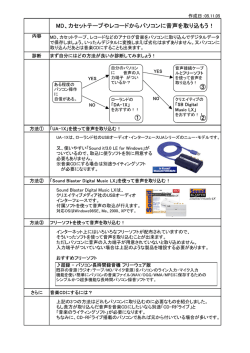
解説:特集 音響制御の最前線 —再び注目されるアクティブコントロール技術— 複数の演奏空間をネットワーク接続する「音響樽」の実現 伊 勢 史 郎* ・池 田 雄 介* *京都大学工学研究科/JST CREST 京都府京都市西京区京都大学桂 *Faculty of Engineering, Kyoto University/JST, CREST, Kyoto University Katura, Nishikyo-ku, Kyoto, Japan *E-mail: [email protected] キーワード:音場再現 (sound field reproduction),境界音場制御の原 理 (boundary surface control principle),臨場感通信 (telepresence),多 チャンネルスピーカシステム (multi-channel loudspeaker system),逆 システム (inverse system). JL 0012/12/51121110 1. はじめに C 2012 SICE ものであり,境界面上に音源を必要とするものではない. アクティブ騒音制御の実験研究において点音源を用いず 境界音場制御の原理は約 20 年前にわが国で提案された音 に可能となった領域の制御を理論的に説明するためにはど 場再現およびアクティブ騒音制御技術の理論的枠組みであ うすればよいか.境界要素法で用いられる積分方程式の物 るが,近年の多チャンネルオーディオ技術の低コスト化に 理的解釈を音場制御理論として応用することができないか. 伴い,音場再現システムとしての実用化の可能性が高まっ この 2 点が境界音場制御の原理が提案されるきっかけとなっ ている.また情報技術の発展により,2 つの音場再現システ た8)∼10) . ムをネットワーク接続した聴空間共有システムの試みも始 まっている.本稿ではまず音場制御理論の歴史的背景につ いて述べ,つぎに境界音場制御の原理について紹介し,さ らに最新の応用例として,複数の再生音場をネットワーク 接続することにより,遠隔環境でのアンサンブル演奏を可 能とする「音響樽」を紹介する. 2. 音場制御理論の歴史的背景 音場制御の理論はホイヘンスの原理を元に組み立てられ てきたという歴史的経緯がある.そのため,音場制御の理 論を数学的に説明する場合に,ホイヘンスの原理の数学的 な解釈と位置付けられているキルヒホッフ–ヘルムホルツ積 3. 境界音場制御の原理 3.1 キルヒホッフ–ヘルムホルツ積分方程式の物理的解釈 図 1 のような音源を含まない閉曲面 S で囲まれた 領域 V を想定する.音圧に関するヘルムホルツ方程式 (∇2 + k 2 )p(r) = 0 を積分方程式として表わしたキルヒ ホッフ–ヘルムホルツ積分方程式は次式のようになる. ∫∫ ∂p(r) ∂G(r|s) (1) G(r|s) − p(r) δS ∂n ∂n S { } p(s) s ∈ V = 0 s 6∈ V 分方程式 (以降積分方程式と略す) が用いられてきた.すな こ こ で G(r|s) は グ リ ー ン 関 数 と 呼 ば れ ,(∇2 + わち積分方程式に現れる各項を音源の数学的性質として述 k )G(r|s) = −δ(r − s) を満たす関数である.三次元音 べることにより,音場制御において必要な音源の性質が数 場では 2 学的に記述された1)∼4) . 1930 年代にスピーカが商用化され,立体音響を生成する ステレオフォニクスの夢が語られるが,1960 年代には積分 方程式に現れるような音源を作ることができないという挫 折が論文にも現れる5) .この雰囲気はアクティブ騒音制御 G(r|s) = exp(−jk|r − s|) 4π|r − s| が解の一つとして知られているが,これは自由音場の点 r に点音源 (モノポール音源) がある場合の点 s における音 の分野にも脈々と存在し,たとえば三次元音場をある領域 で静穏化することは不可能という理論的見解が重しとして 存在していた. 1990 年代にはディジタル信号処理技術を用いた音場制御 の実験研究が盛んになり,特にアクティブ騒音制御の分野 では複数の二次音源を用いて広い領域を静穏化する実験例 が報告される6), 7) .しかし,この実験結果は理論的には説明 できなかった.一方,コンピュータを用いて音場を数値的 に解くために積分方程式を用いる数値計算法が現れた.そ の一つである境界要素法における積分方程式の解釈は,境 界面上の物理量から領域内の物理量が決まるという素直な 1110 図 1 閉曲面 S で囲まれた領域 V 計測と制御 第 51 巻 第 12 号 2012 年 12 月号 圧に等しい.また ∂G(r|s)/∂n は法線 n 方向に設置した二 重音源 (ダイポール音源) と解釈できる.一般に場を表わす 微分方程式を積分表示したときに境界上に現れるグリーン 関数はその場を生成する源と考えられてきた11) .したがっ て,(1) 式はつぎのように解釈できる.領域 V 内の音場 p(s) は,境界面 S 上に配置された振幅 ∂p(r)/∂n のモノ ポール音源と振幅 −p(r) のダイポール音源によって生成さ 0 gi ,gi は距離 |r − s| から決まる係数であると前述した が,これは積分方程式に現れるグリーン関数 G(r|s) およ びその法線方向微分 ∂G(r|s)/∂n に関しても同じである. 0 すなわち領域 V が領域 V と合同であれば,グリーン関 0 数およびその法線方向微分は領域 V と領域 V において 同じ値になる.式で表わすと ∀r ∈ S れる.ここにホイヘンスの原理における音源の性質の数学 的表現が現れていることがわかる.これを音場制御の原理 0 0 0 ∀s ∈ V ∀s ∈ V 0 0 0 G(r|s) = G(r |s ) として説明すると,つぎのようになる.領域 V 内の音場 p(s) を再生するためには,原音場において境界面 S 上で 音圧 p(r) とその勾配 ∂p(r)/∂n を計測し,再生音場にお 0 ∀r ∈ S (4) 0 ∂G(r|s) ∂G(r |s ) = ∂n ∂n0 が成り立つ.したがって,(1) 式,(3) 式,(4) 式から ∀r ∈ S いて同じ形の境界面上にモノポール音源とダイポール音源 を配置し,振幅がそれぞれ ∂p(r)/∂n と − p(r) となるよう 0 ∀r ∈ S 0 0 ∂p(r ) ∂p(r ) = ∂n ∂n0 0 (5) p(s) = p(s ) 0 p(r) = p(r ) 0 =⇒ ∀s ∈ V に調整すればよい.積分方程式における「解の一意性」の 0 ∀s ∈ V 0 条件が成立する境界面形状 (たとえば無限大の面) であれば が導かれる.(5) 式は原音場においてある領域を囲む境界 レイリー積分方程式が成立し,モノポール音源のみで積分 面上の音圧と粒子速度 (音圧勾配) を計測し,それらが再生 方程式は表現できる12) .それでも無限大の面をいかに近似 音場において (相対的に) 同じ位置で再生されたとき,原音 できるか,モノポール音源をどのように作るかという問題 場における領域内音場は再生音場に完全に再生されること が残る. を意味する.これを境界音場制御の原理と定義する13), 14) . 一方,数値計算で用いられる境界要素法の研究分野では 音場再現システム ホイヘンスの原理とは異なる文脈で積分方程式の数式展開 4. が行われてきた.(1) 式において境界面 S を N 個の微小 4.1 音圧による音場再現 な要素 Si (i = 1 · · · N ) に分割し,各要素内では音圧 p(r) と音圧勾配 ∂p(r)/∂n が一定であると仮定した場合,(1) 式はつぎのように離散化することが可能となる. N ∑ gi i=1 0 ∂p(ri ) − gi p(ri ) = p(s) ∂n s∈V ∂p(ri ) ∼ p(ri + ni ) − p(ri − ni ) = ∂n 2|ni | (2) すなわち音圧勾配は境界面 Si における法線上の 2 点 ri ±ni の音圧から求めることができる.音圧についても 2 点の平均 0 ただし,gi および gi は領域 V 内における対象とする点 s と境界要素 ri との距離 |r − s| から決まる係数であり, つぎのように表わされる. ∫∫ gi = 法線方向の音圧勾配は次のような差分近似により表わさ れる. G(r|s)δS Si 0 ∫∫ gi = Si p(ri + ni ) − p(ri − ni ) p(ri ) ∼ = 2 を用いると (2) 式はつぎのように表わされる. ∂G(r|s) δS ∂n 2N ∑ すなわち領域 V 内のある点 s の音圧は境界面 S 上の離 散点の音圧と音圧勾配にある係数を乗じ,それらの総和か は,ホイヘンスの原理のように境界面 S 上に音源が想定さ i= j+1 2 ∫∫ 0 S 0 = p(s ) 計測と制御 0 0 0 0 s ∈V 第 51 巻 0 第 12 号 2012 年 12 月号 gi g − i 2|ni | 2 qj = ri + ni 偶数のとき i= j 2 0 fj = gi g − i 2|ni | 2 qj = ri − ni このように境界の離散化と音圧勾配の音圧差による表現 という 2 つの近似が成り立てば,われわれは 2N 点の音圧 0 0 ∂G(r |s ) ∂p(r ) G(r |s ) − p(r ) ∂n0 ∂n0 δS 0 (6) 0 fj = れていないことがわかる. 3.2 2 つの音場の相等性 ある空間に領域 V の音場 (原音場),それとは別の空間 0 に領域 V (V と合同とする) の音場 (再生音場) を想定する. s∈V ただし,j は奇数のとき ら求めることができると解釈できる.このように境界要素 法の定式化において用いられる積分方程式の物理的解釈で fj p(qj ) = p(s) j=1 から一意的に領域 V 内の音場を決めることができる.これ は言い換えれば一意的に領域 V 内の音場を決めることがで (3) きる M 点 (M ≤ 2N ) の音圧の観測位置あるいは制御位置 1111 図 2 境界音場制御の原理に基づく音場再現システム (BoSC システム) (以降これらを総称して音圧制御点と呼ぶ) が存在するとい うことである.M が 2N より小さくなる可能性は大いに おけるマイクロホンからの出力信号ベクトルを [yj ](∈ C M ) とすると次式が成り立つ. ある.たとえば領域の形状で決まる固有周波数以外では音 [yi ] = [xi ][hji ][gij ] 圧のみで一意性が成立することが知られており15) ,その場 合には M = N となる.そこで一意的に領域 V 内の音場 を決めることができる最小の音圧制御点を qj (j = 1 · · · M ) として議論を進める. 4.2 離散点における境界音場制御の原理 3.2 と同じようにある空間に領域 V の音場 (原音場),そ 0 れとは別の空間に領域 V と合同となる領域 V の音場 (再 0 生音場) を想定する.領域 V ,V の両方において音場を一 0 意的に決めることができる音圧制御点 qj ,qj (j = 1 · · · M ) が存在する.すなわち, M ∑ fj p(qj ) = p(s) 0 ただし,xj = p(qj ),yj = p(qj ) である.ここで (7) 式 が成立するためには [yj ] = [xj ] となる [hji ] を求めればよ い.[gij ] が正則であれば [hji ] = [gij ]−1 を求めればよい が,現実には [gij ] は正則とならない場合が多い.そこで 正則化一般逆行列 [hji ] = ([gij ]† [gij ] + βIM )−1 [gij ]† (9) を用いる.ただし [·]† は行列の共役転置,β は正則化パラ メータ,IM は M 次元単位行列である.正則化パラメータ を加えることにより,行列の対角成分が大きくなるためそ s∈V の逆行列から安定した FIR フィルタを設計することが可能 j=1 M ∑ (8) となる.理論的には正則化パラメータを加えないほうが音 0 0 0 fj p(qj ) = p(s ) 0 s ∈V 0 場再現精度は高くなるはずだが,現実のシステムでは線形 時不変性が成立せず,むしろ正則化パラメータを加えない j=1 が成り立つ.音圧制御点の相対的位置が同一であれば, 0 fj = fj となるため, 0 p(qj ) = p(qj ) j = 1 · · · M =⇒ ∀s ∈ V 0 ∀s ∈ V 0 と音場再現精度が低くなり聴き苦しい音が再生される可能 性がある16), 17) . 5. (7) 音響樽の開発 5.1 音場共有システム 複数の BoSC システムを用いて,互いに信号をやりとり 0 p(s) = p(s ) が導かれる.これは,原音場における M 点の音圧制御点 0 することにより遠隔に位置するユーザーが同じ空間を感じ qj で音圧 p(qj ) を計測し,再生音場における音圧制御点 qj 0 で音圧 p(qj ) が原音場と等しくなるように音場を制御する ことができれば,原音場における領域 V 内の音場は再生音 0 場における領域 V 内に再生されることを意味する. 4.3 音場再現システム 境界音場制御の原理に基づく音場再現システム (以降 Boundary Surface Control の頭文字をとって BoSC シス テムと呼ぶ) を図 2 に示す. ながら会話することができるようなシステムを構築するこ 原音場での収録信号から得られる逆システムの入力信号ベ で再生された音声は制御点上のマイクロホンアレイによっ クトルを [xj ](∈ C M ),逆システムの伝達関数マトリクスを て収音され (WA→B ),逆システムを畳み込んだ後,再現音 M ×L とができる.すなわち,音場共有システムは,会話の相手 が遠隔に位置することを意識せずに,目の前に存在するも のとして会話をすることを可能とするものである18) .2 つ の BoSC システムを用いる場合の音場共有システムの概念 図を図 3 に示す. 話者 A の音声は再現音場 A のマイクロホンによって収 音され,仮想共有音場において再生される.仮想共有音場 ),再生音場におけるスピーカからマイクロホ 場 B においてスピーカから出力される.また,話者 B の音 ンへの伝達関数マトリクスを [gij ](∈ C L×M ),再生音場に 声も上記と同じ処理をし,再現音場 A においてスピーカか [hji ](∈ C 1112 計測と制御 第 51 巻 第 12 号 2012 年 12 月号 図 3 音場共有システムの概念図 ら出力することにより話者 A と B は同じ空間で会話する れらは床下に設置されたデジタルアンプによって駆動され のと同じ物理条件を達成することが可能となる.同時に仮 る.天井には 6 個のスピーカを設置し,また壁面に設置し 想共有音場において背景音 (NA ,NB ),たとえば自然の中 たスピーカは高さ方向に 6 層あり,最上層と最下層が 9 個 ならば鳥の声や木々の揺れる音など,を付加することによ のスピーカで,それ以外の 4 層は 18 個のスピーカで構成 り,話者 A,B は互いに同じ空間情報を感じながら,相手 される.各層の間隔の平均は約 350 mm である.水平方向 が同じ空間に存在するものとして会話を進めることが可能 のスピーカ間隔は最上層と最下層については約 540 mm で となる. あり,その他の 4 層は約 330 mm である.また音響樽の壁 音場共有の最初の実験的な試みは櫓型 (あるいはドーム型) 面部分は水平方向に 9,高さ方向に上部,中部,下部の 3, の BoSC システム (スピーカ数 62) によって行われた19), 20) . すなわち 27 個のモジュールに分解することが可能である. この音場共有システムでは話者の方向の知覚が可能となり, 吸音材には吸音効果と快適性を両立可能なポリウール (厚 また三者の会話において話者の顔の向きに応じて音場を再 現することにより,より自然な遠隔会話コミュニケーショ ンができることがわかった21), 22) . 5.2 音響樽 BoSC システムは受聴者の頭部周囲において音場を空間 的に再現することができるため,受聴者は頭部を自由に動 かすことができる.それが定位感や距離感など空間の表現 力を高める特徴をもたらす17), 22) .しかしながら,櫓型の BoSC システムはつぎのような点で問題がある.まず空間 が狭いため楽器などを持ち込むことができない.つぎにス ピーカが上半分に集中しているため下方からの音波の生成 が難しい.さらにスピーカシステムが防音室内にほぼ固定 されているため,分解と組み立てが容易ではなく,外部で デモを行うことが難しい.これらの反省を踏まえ,次世代 の BoSC システムとして「音響樽」を開発中である. BoSC システムの音場再現性能を維持するためには逆フィ ルタを設計できることが前提となる.音場の逆システムは 音響モードに依存することが知られている.そこで室内の 平行壁面をできるだけ少なくして音響モードの規則性を小 さくすることをねらい,写真 1 のような平面が正九角形の 樽型形状を採用した.この樽型形状の BoSC システム (以 降,音響樽と呼ぶ) は内寸の中央直径が 1950 mm,高さが 2150 mm であり,システム内部で管楽器や弦楽器などの楽 器を演奏するのに十分な広さをもっている.床面を除くす べての方位に合計 96 個のフルレンジスピーカを設置し,そ 計測と制御 第 51 巻 第 12 号 2012 年 12 月号 写真 1 音響樽 1113 さ 60 mm × 2,密度 32 kg/m3 ) を採用した.音響樽の遮音 性能は Dr-20 であり,また残響時間を短くすることで,逆 システムの設計しやすさに配慮した. 音場の収録や伝達関数の測定に用いる BoSC マイクロホ ンアレイを写真 2 に示す.マイクロホンアレイは C80 フ ラーレン分子構造と同形状をしており,節の部分に無指向 性マイクロホン (DPA 4060BM) が合計 80 個取り付けて ある.マイクロホンアレイの直径は約 46 cm であり,受聴 者の頭部を取り囲むのに十分な大きさとなるよう設計され ている. 遠隔においてアンサンブル演奏を可能とする音場共有シ ステムの構成を図 4 に示す.計算機はネットワークを介し て音響信号を相手のシステムに送信する.また,計算機は 収録音場データベースから相手と共有する音場データを取 得し,音場再生を行う.音場データにはあらかじめ逆シス テムを畳み込んでおくことで,取得した音場データをその ままスピーカに出力するだけで音場再現が可能となる. システム間で伝送される演奏音には原音場で収録された 伝達関数を実時間で畳み込む必要がある.システム内で収音 された演奏音は,原音場における音源位置から相手聴取位置 写真 2 レイ 音響樽内部に設置された BoSC マイクロホンア に対応した制御点までの伝達関数 ([wj ]A→B ,[wj ]B→A ) と 畳み込まれて相手の音場で再現される.また,音源位置から 自らの聴取位置に対応した制御点への伝達関数 ([wj ]A→A , 図 4 遠隔においてアンサンブル演奏を可能とする音場共有システム 1114 計測と制御 第 51 巻 第 12 号 2012 年 12 月号 [wj ]B→B ) から直接音を取り除いた伝達関数と演奏音を畳み 込み,自らのシステムに再生することで,自らの演奏音に 対する原音場の反射音を再現する.ただし,システム内で 15) の演奏音の収音系においてエコーキャンセラが必要となる. 音響樽の音場再現性能については物理的,心理的評価の 16) 両面から研究が進行中であるが,基本的な予備調査におい て従来の櫓型 62 チャンネルの BoSC システムよりも高い 17) 音場再現性能が得られていることが実証されつつある. 謝辞:以上の研究成果は総務省戦略的情報通信研究開発 推進制度 (H18-H20),および文部科学省科学技術振興調 18) 整費 (H18-H20),科学技術振興機構-戦略的創造推進事業 CREST「音楽を用いた創造・交流活動を支援する聴空間共 有システムの開発」(H22.10-H28.3 予定) の支援により実 施したものである.音響樽の外壁の開発には京都大学・建 19) 20) 築家竹山聖氏に協力していただいた. (2012 年 7 月 30 日受付) 参 考 文 献 1) S.I. Konyaev, V.I. Lebedev and M.V. Fedoryuk: Discrete approximation of a spherical huygens surface, Soviet Physics - Acoustics, 23–4, 373/374 (1977) 2) M.J.M. Jessel: Secondary sources and their energy transfer, Acoustics Letters, 4–9, 174/179 (1981) 3) J.E. Ffowcs-Williams: Anti-sound, R. Soc. London, A395, 63/88 (1984) 4) P.A. Nelson and S.J. Elliott: Active control of sound, 275/294, Academic Press, London (1992) 5) M. Camras: Approach to recreating a sound field, J. Acoust. Soc. Am., 43, 1425/1431 (1968) 6) S. Ise, H. Yano and H. Tachibana: Application of active control to sound insulation of building walls, Proc. of The 20th International Congress and Exposition on Noise Control Engineering (INTER-NOISE 1991), 625/628 (1991) 7) 三好正人,金田豊:音場の逆フィルタ処理に基づく能動騒音制 御,音響学会誌,46–1, 3/10 (1990) 8) 伊勢史郎,橘秀樹:音場制御理論の比較,電子情報通信学会技 術報告,EA93-26, 6, 55/60 (1993) 9) 伊勢史郎,橘秀樹:エネルギーを視点としたアクティブ制御の 分類,日本音響学会研究発表会講演論文集,689/690 (1993) 10) 伊勢史郎:広範囲の音場再現についての研究 (1)—キルヒホッ フの積分公式に基づいて—,日本音響学会研究発表会講演論文 集,10, 479/480 (1993) 11) G.F. Roach: Green’s Functions - 2nd ed., 1/8, Cambridge University Press, Cambridge (1992) 12) E.G. Williams: Fourie Acoustics, 272/281, Academic Press, London (1999) 13) 伊勢史郎:キルヒホッフ–ヘルムホルツ積分方程式と逆システム 理論に基づく音場制御の原理,日本音響学会誌,53, 706/713 (1997) 14) S. Ise: A principle of sound field control based on the 計測と制御 第 51 巻 21) 第 12 号 2012 年 12 月号 22) 23) Kirchhoff-Helmholtz integral equation and the theory of inverse systems, Acustica, 85, 78/87 (1999) R.E. Kleiman and G.F. Roach: Boundary integral equations for the three dimensional Helmholtz equation, SIAM Rev.16, 214/236 (1974) H. Tokuno, O. Kirkeby, P.A. Nelson and H. Hamada: Inverse Filter of Sound Reproduction Systems Using Regularization, IEICE Trans. Fundamentals, 80-A–5 (1997) S. Enomoto, Y. Ikeda, S. Ise and S. Nakamura: Threedimentional sound field reproduction and recording system based on boundary surface control principle, Proc. ICAD 2008 (2008) 伊勢史郎,豊田政弘,榎本成悟,中村哲:深いコミュニケーショ ンを可能とする空間創造の試み–プロジェクトの基本方針–,日 本音響学会講演論文集,585/586 (2007) 榎本成悟:三次元音場通信システム,音響技術,No.148 (38–4), 37/42 (2009) 榎本成悟,池田雄介,伊勢史郎,中村哲:境界音場制御の原理に 基づく 3 次元音場再現システムによる空間を共有したコミュニ ケーションの実現,日本音響学会講演論文集,1411/1414 (2009) Y. Ikeda, S. Enomoto, S. Ise and S. Nakamura: Three-party sound field sharing system based on the boundary surface control principle, Proc. ICA 2010 (2010) S. Enomoto, Y. Ikeda, S. Ise and S. Nakamura: Optimization of loudspeaker and microphone configurations for sound reproduction system based on boundary surface control principle, Proc. ICA2010 (2010) 榎本成悟,池田雄介,伊勢史郎,中村哲:境界音場制御の原理 を用いた音場再現システムにおける距離感の再現精度に関する 評価,日本音響学会講演論文集,725/726 (2008) [著 い 伊 せ し 勢 史 者 紹 介] ろう 郎 君 (正会員) 京都大学工学研究科准教授.91 年東京大学工 学研究科博士後期課程修了.早稲田大学講師,奈 良先端科学技術大学院大学助手等を経て 98 年よ り現職.工学博士.境界音場制御の原理に基づく アクティブ騒音制御や音場再現技術などに従事. いけ 池 だ 田 ゆう 雄 すけ 介 君 2001 年早稲田大学理工学部情報学科卒業.03 年同大学大学院修士課程修了.07 年同大学博士課 程修了 (国際情報通信学).07 年 (株) 国際電気通 信基礎技術研究所 (ATR) 研究員.09 年 (独) 情 報通信研究機構 (NICT) 専攻研究員.11 年京都 大学大学院工学研究科研究員となり現在に至る. 音場再現,音場測定・可視化に関する研究に従事. 1115
© Copyright 2026 Paperzz