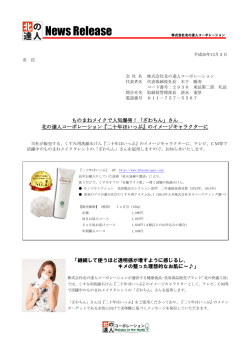
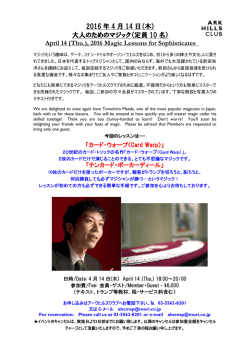
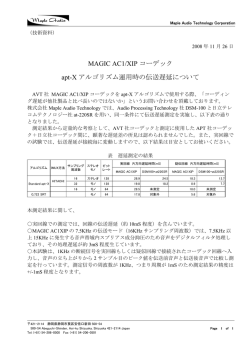
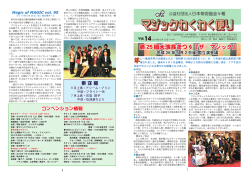
特集 特 集 記 事 パーソナルネットワークの技術特集 位置・方向検出機能統合型面状通信システム 東京大学 先端科学技術研究センター 南 正輝 森川 博之 1.まえがき センサネットワークは環境モニタリング等、幅広い分野 への応用が期待されている。特に屋内環境ではコンテキス ト適応型サービス、介護サービス、プレゼンスシステム、 防災システムなど、多くの有用なアプリケーションが期待 されており、 屋内環境でセンサを活用したサービスに関す る様々な研究が進められつつある。しかしながら、屋内環 境へセンサノードを設置して運用するためには多くの実際 的な課題を克服しなくてはならない[1]。そのような課題の 中でも、次の2 つの課題はセンサネットワークの導入時段 階で発生する大きな障壁であると考えられる。 第一の課題はセンサノードへの電源供給の問題である。 センサネットワークでは多数のセンサを面的に配 置し、 高密度センシングシステムを構成できることが一つ の特徴であり、 これに向けてバッテリ駆動型の省電力無線 センサネットワークの研究開発が進められてきた。しかし ながら、 バッテリ交換作業の負担や昨今の環境保護意識の 高まりに鑑みれば、バッテリ交換を行うことなくセンサ ノードを連続的に駆動できることが望ましい。このような 課題に対して太陽電池を用いたバッテリレス型の無線セン サネットワークの研究などもあるが[2, 3]、取得できる電力の 環境依存性により安定的なセンシングが行えなかったり、 取得できる電力量が少ない屋内環境での運用が難しいなど の課題を克服するには至っていない。 第二の課題はセンサノードの位置決め問題である。セン サネットワークが扱う情報は空間的な依存性が極めて高い 情報である。例えば温度情報にしても、どの場所で取得さ れた温度であるかが分からない場合、その情報の価値は無 いに等しい。すなわち、センサネットワークでは取得した 情報と位置情報との対応関係を明確にする必要がある。こ れに対し、 屋内において測位を行うための様々な技術が開 発されてきた[4]。これら従来研究の多くは音波や電波を用 いた3 次元測位を目指して研究が進められている。しかし ながら、 音波や電波の伝搬環境が劣悪となる屋内において 安定的かつ高精度な測位を行うことは困難を極め、従来研 究の成果を持ってしても実際的な測位を行えるレベルには 至っていない。 一方、センサノードが実際に設置される場所を考える と、天井、床、壁、机の上など、空間内の「面」にセンサ ノードが設置されることが一般的である。そこで筆者らは 前述の2 つの課題を克服するための機能を面に統合化し、 センサノードの容易な設置と運用を可能にするハードウェ アプラットフォーム技術である「Magic Surfaces」を設計 し、そのプロトタイプ実装を進めてきた[5]。 ヒューマンインタフェース学会誌 Vol.10 No.4 2008 (27) 図1 Magic Surfacesの構成 図1 に示すようにMagic Surfaceのシステムは面状のデバ イス(MSボード)を壁紙のように空間に敷き詰めること で構成され、面の上に置かれたセンサノード等のオブジェ クト(MSオブジェクト)に対して、電源機能、位置・方 向検出機能、面を通じたオブジェクト間の通信機能を提供 する。これらは時分割型のプロトコルによって制御され、 ボード上の複数のオブジェクトに対して各機能を提供す る。また、敷き詰めた面状デバイスの位置関係を自動的に 設定するアルゴリズムを具備し、システム自体の導入を容 易にする機能も有している。さらに、空間のデザインを損 ねないよう、MSボード表面への塗装などにも対応できる ように設計がなされており、電源機能、位置・方向検出機 能、および通信機能は磁気的な手法を用いて非接触で実現 される。 以下では、2.で関連研究との比較を行い、Magic Surface の位置付けを明確にする。次いで3.ではMagicSurfacesの 各機能の具体的な実現方法について述べる。次いで、4.で はMagic Surfacesの実装と評価結果について述べ、最後に 5.でまとめとする。 2.関連研究 ここでは、Magic Surfacesに特徴的な機能である、非接 触での電源機能、位置・方向検出機能、通信機能の提供、 およびシステムの自動設定機能の観点から関連研究との比 較を行う。 面状デバイスによる空間のインテリジェント化を目指した 研究はこれまでにいくつか行われている。Networked Surfaces[6] 211 特集 はその嚆矢であり、金属端子を多数配置したボードを通じ て、 その上に配置されるオブジェクトに電源機能と高速通 信機能を提供している。また、ボード上での端子の配置関 係を利用して位置・方向検出も実現している。しかしなが らNetworkedSurfacesは金属端子を通じてボードとオブ ジェクトが接触する必要がある。屋内空間の面はそのデザ インの観点から塗装が行われることが一般的であるため、 接触型ではなく、非接触型で電源、位置・方向検出・通信 機能を実現できることが好ましい。 Pushpin Computing[8]およびPin & Play[9]は電源機能と通信 機能を導電性のシートを利用してシート上のオブジェクト に提供する技術である。しかしながら、これら技術は位置 検出の機能を提供することはできない。 CarpetLAN[7]はカーペットタイル型の位置検出・通信シ ステムであり、人体通信を利用して精度1mでの位置検出 と10Mbps の高速通信を実現するシステムである。1mの精 度は人間を対象としたアプリケーションには十分な精度で あるものの、机の上でのセンサの識別など、より高い精度 を要求されるアプリケーションへの対応は難しい。また、 CarpetLAN では方向検出機能をサポートしておらず、セン サの指向性などを考慮しなければならないアプリケーショ ンへの対応も難しい。さらに、電源機能についてはその設 計において考慮されていない。 SmartTable[10]はオブジェクトに固有のパターンで磁石を 取り付け、 テーブルに埋め込まれた多数の磁気センサによ りこれを検出することで、オブジェクトの位置と方向を検 出するデバイスである。しかしながら、SmartTableでは電 源機能と通信機能はサポートされていない。 Sensetable[11]は電磁タブレットを利用してオブジェクトの 位置と方向を検出できるデバイスである。Sensetable は ユーザインタフェースを応用先として設計されているため に、非常に高精度な位置・方向検出が可能であるが、やは り電源機能と通信機能はサポートされていない。 Sensopad[12]はMagic Surfacesと同様に、センシングシス テムの容易な構築を目的とした面状デバイスであり、電磁 誘導を利用してセンサの位置・方向などを実現している。 しかしながら、Sensopadはその技術的詳細がオープンに なっていない。また、スケーラビリティの観点から大規模 なエリアへの適用が可能かどうかも明らかではない。 プリンテッドエレクトロニクスあるいはフレキシブルエ レクトロニクスの分野においては、人工皮膚[13]、シート状 スキャナ[14]、2 次元通信シート[15]、フレキシブル電力伝送 デバイス [16] などの興味深いデバイスの開発が行われてい る。 これら研究は主としてデバイスのファブリケーション に主眼が置かれており、 デバイスの自動設定機能等、Magic Surfacesが対象としているシステムレベルの研究までは行 われていない。しかしながら、これらのデバイス技術は高 機能な面状のシスムを作成する上で非常に有用な要素技術 であり、Magic Surfacesを含め、システムレベルの先行研 究との融合が重要であると考えている。 このように、関連研究では電源機能、位置・方向検出機 能、通信機能を非接触で実現し。かつ自動設定機能等のシ 212 ステムレベルで必要となる機能の実現までは行っていない。 これに対し、Magic Surfacesではこれらすべての機能を磁気 的な手法を用いて統一的に実現する点が特徴となっている。 3.デザイン 本節ではMagic Surfaces を構成する各機能の実現方法に ついてその設計の要点をまとめる。 3. 1 基本機能の実現 これまで述べたように、Magic Surfacesは屋内センサ ネットワークシステムの容易な構築を支援するための3つ の基本機能(電源、位置・方向検出、通信機能)を提供す る。3つの基本機能は実際の環境へ導入することを考えて、 金属端子等を利用する接触型ではなく、非接触型で実現す る必要がある。そこで、MagicSurfacesでは磁気の性質を利 用することでこれら基本機能を非接触型で実現することを 試みている。これに向けて、Magic Surfaces で は MSモ ジュールと呼ばれるハードウェアモジュールを基本単位と して、システムを構成している。 図2にMSモジュールの構成を示す。MSモジュールは コイル、電子コンパス、変復調回路、およびマイクロコン トローラからから構成される。コイルは電力の送受、位置・ 方向検出用の直流磁界発生、および通信における送信器と して用いられる。電子コンパスは位置・方向検出における 磁界の向きの測定と通信における受信器として用いられ る。変復調回路はマイクロコントローラからのデータを受 け、キャリアを振幅変調してコイルを駆動するとともに、 電子コンパスで受信した信号を復調してマイクロコント ローラに出力する。 MS ボードはMS モジュールを複数個並べて構成され、 ボード上のオブジェクトにはMSモジュールが単体で搭載 される構成となる。以下ではMSモジュールを用いてどの 様に基本機能が実現されるかを説明する。 (1)電源機能:電源機能はMSボードからMSオブジェク トへ非接触で電力を伝送する機能である。電源機能の原理 は極めて簡単であり、電磁誘導によりボード側からオブ ジェクト側に電力を伝送する。具体的にはボード側のコイ (28) 図2 MSモジュールの構成 ヒューマンインタフェース学会誌 Vol.10 No.4 2008 特集 ルに交流電圧を印可し、オブジェクト側のコイルでこれを 受ける。なお、現在の実装ではコイルの最適化等が行われ ていないため、 十分な効率で電力伝送することができてい ない。これについては今後改良を行う必要がある。 (2)位置・方向検出機能:位置・方向検出機能はMagic Surfacesの最も特徴的な機能である。Magic Surfacesでは従 来の屋内測位システムとは異なり、オブジェクトの3次元 的な位置ではなく2次元的な位置と方向を検出する。これ は現実の屋内空間に設置されるオブジェクトでは空中に浮 遊するものは無く、実用上は2次元の位置検出で十分であ るという考えに基づいている。 例えば、図3に示すように、部屋の中に机があり、机の 上に置かれた小さな棚の上にMSオブジェクトを搭載した センサノードがあるような状況を考える。今、床、机の天 板、棚がMSボードにより覆われていると仮定し、机の脚 と棚の下面にMSオブジェクトが存在するとする。また、 机と棚の大きさはそれぞれ既知であるとする。 このとき、 机の位置と方向は机の脚に埋め込まれたオブ ジェクトにより求めることができる。また、机の大きさが 既知であるため、天板のMSボードの床に対する位置関係 を求めることができる。同様にして、机に対する棚の位置 関係、棚に対するMSオブジェクトの位置関係を求めるこ とが可能である。したがって。これらの情報を総合的に用 いることにより、最終的には部屋の中での当該センサノー ドの位置を求めることが可能になる。 すなわち、 屋内のオブジェクトの大きさが既知であれば、 Magic Surfacesの様な2次元の位置・方向検出によりすべて のオブジェクトの位置関係を求めることが可能となる。 実際の位置・方向検出は次のような原理に基づいて実現 される。Magic Surfacesではオブジェクト側でコイルに直 流電流を流して磁場を発生させ、磁力線の向きをボード側 の電子コンパスで検出し、オブジェクト側コイルの位置と 方向を同時に求める。 図4に位置・方向検出の原理を示す。オブジェクト側の コイルに直流電流を流すと、コイルからは図に示すような 磁場が発生する。コイルを磁気双極子と見立てれば、電磁 気学の理論によって、コイルから距離rの点における磁場 ベクトルを求めることが可能となる。これを逆に利用し て、ボード上に配置された位置が既知の3つ以上の電子コ ンパス(図中S1∼S3)によりそれぞれの点における磁場 ベクトルを求めて連立方程式を解くことで、オブジェクト 側のコイルの位置(x, y)と方向σを求めることが可能と なる。なお、この連立方程式の解を解析的に求めることは 難しいため、実際の解はニュートン法により数値的に求め ている。このような原理でMagic Surfaces はオブジェクト の位置と方向を決定する。 (3)通信機能:Magic Surfacesでの通信は送信器にコイル、 受信器に電子コンパスを用いて行われる。送信側のMSモ ジュール内の変調回路はマイクロコントローラからのデー タを受けてASK(Amplitude Shift Keying)の信号を生成す る。その信号はコイルを通じて振幅変調された交番磁界に 変換される。一方、受信側のMSモジュールは電子コンパ スによりASK信号を受信し、ASK復調回路を経てディジ タルデータが受信側MSモジュールのマイクロコントロー ラに送られる。 3. 2 制御プロトコル 3. 1で述べた各機能は制御プロトコルにより統合化され、 時分割で制御される。制御プロトコルの目的はボード上に 載せられたオブジェクトの自動検出と、それらオブジェク トへの基本機能の提供を行うことである。制御プロトコル は大きく分けてオブジェクト検出フェーズとオブジェクト 管理フェーズに分かれる。 オブジェクト検出フェーズではすべてのオブジェクトに 向けて、ボード側からID要求メッセージをブロードキャ ストする。ボード上に新たに追加となったオブジェクトは このメッセージを検出すると、オブジェクト自身のIDを CSMA(Carrier Sense Multiple Access)のメディアアクセス 制御にしたがって送信する。ボード側はこれを受信するこ とで、新たなオブジェクトがボード上に追加されたことを 検知し、そのオブジェクトをボード側のデータベースに登 録する。登録されたオブジェクトに対し、次に説明するオ ブジェクト管理フェーズにて位置検出や通信等のリソース が割り当てられる。 図3 Magic Surfacesによる屋内オブジェクトの位置決め 図4 位置・方向検出の原理 ヒューマンインタフェース学会誌 Vol.10 No.4 2008 (29) 特集 オブジェクト管理フェーズでは時分割により、それぞれ のオブジェクトに対して電源供給、位置・方向検出、通信 の各機能が提供される。オブジェクト管理フェースでは ボード側からのポーリングによって、オブジェクトに対し て送受信すべきデータがあるかを確認する。データがある 場合にはデータの送受信を行うと共に位置・方向検出と電 源供給が行われる。これをボードが認識しているすべての オブジェクトに対して行う。このとき、一定期間あるオブ ジェクトからの応答が得られない場合、そのオブジェクト はボード外に移動したものと判断して登録を抹消する。 ボード間をつなぐネットワーク(EthernetやZigBee等)に よりサーバに転送し、サーバ側でボード間の隣接関係を再 構築することで各ボードの位置関係を知ることができる。 4.実装と評価 Magic Surfacesのコンセプトを具体化すると共に、位置・ 方向検出機能の性能評価を行う目的で、制御プロトコルま でを含めたプロトタイプシステムの実装を行った(図6) 。 また、システムのスケーラビリティを評価する目的で自動 設定アルゴリズムのシミュレーション評価を行った。MS モジュールの実装では、マイクロコントローラにマイクロ チップ社のPIC18LF452、コイルにはパーマロイコアに200 ターンの銅線を巻いたもの、電子コンパスにはアイチマイ クロインテリジェント社のMIセンサを用いている。 位置・方向検出性能の評価では、正方形に電子コンパ スを配置し、その中心にMS オブジェクトを置いて、セ ンサとオブジェクトのコイルとの距離Rを変化させながら 位置・方向を95%のCDF(Cumulative DistributionFunction) で評価した(測定はそれぞれ100回ずつ行っている)。図7 より、コイルと電子コンパスとの距離が大きくなるにつれ 位置・方向検出誤差が増加するが、Ri6cmの条件下では位 置検出誤差0.7cm以下、方向検出誤差8.8度以下を実現し ている。 自動設定アルゴリズムの評価では、4枚から400枚まで のボードをランダムな形で配置し、すべてのボードからの 情報を取得するまでのステップ数を評価した。ここで、ス テップ数とは隣接ボードへの問い合わせの回数である。図 8に評価結果を示す。図より3. 3節で述べたアルゴリズム 3. 3 自動設定機能 Magic Surfacesではボード側の電子コンパスの位置が既 知であるという前提の下に位置・方向検出を行う。すなわ ち、 それぞれのボードの位置があらかじめ知られているこ とが前提となる。しかしながら。非常に広範囲なエリアを カバーするようにシステムを構築する場合、ボードの位置 決めが大きな負担となってしまう。この問題を回避するた めに、Magic Surfacesでは図5に示すような仕組でボード の位置を自動的に決定する。 図5において、各ボードは同一の大きさの正方形とし、4 辺に通信ポートを持つものとする。通信ポートはMS モ ジュールに用いられている磁気的な通信手段等を用いて構 成しても良いし、 通常のシリアルポートとして構成しても 良い。また、ボードの中で1枚のみあらかじめ位置が決定 されているボードをシンクボードとする(図中000番の ボード) 。まず、シンクボードは隣接するボードが存在す るか否かをそれぞれのポートを時計回りにチェックするこ とで知る。 シンクボードから問い合わせを受けた隣接ボー ド(図中001番、003番、004番のボード)は問い合わせを 受けたポートから同様にして時計回りに隣接ボードの存在 をチェックする。各ボードは収集した隣接ボードのIDを 図6 プロトタイプ実装 図5 ボードの自動設定 図7 位置・方向検出性能評価 (30) ヒューマンインタフェース学会誌 Vol.10 No.4 2008 特集 参考文献 図8 自動設定アルゴリズムのスケーラビリティ はほぼリニアにスケールすることが分かる。すなわち、自 動設定アルゴリズムはボード数が増えた場合においても十 分に実用的な時間で設定が可能である。 5.むすび 本論文では屋内センサネットワークの容易な構成を目的 としたハードウェアプラットフォームであるMagic Surfaces の設計と実装について述べた。Magic Surfacesではセンサ ノードを天井、壁、床に設置するだけでセンサのネット ワーク化を実現することを目指し、磁気的な手法によりセ ンサノードに対して電源、位置・方向検出、および通信の 各機能を提供することを試みた。具体的にはコイルと電子 コンパスを用いたMSモジュールを組合せ、電磁誘導によ る電力伝送、磁力線の向きを利用した2次元測位、磁界の 振幅変調を用いた通信を非接触で実現し、それら機能を時 分割型の制御プロトコルで統合化した。また、自動設定機 能によりMagic Surfacesシステム自体の導入障壁を軽減す ることも可能となるような設計を行った。 Magic Surfacesのプロトタイプ実装結果から、 Magic Surfaces は高精度な位置・方向検出機能を提供できることが示され た。 その一方で、コイルの最適化が行われていないために、 電力伝送と通信のパフォーマンスはかならずしも十分では ない。今後は電力伝送と通信のパフォーマンス向上と、デ バイスの小型化を進める必要があると考えている。現在、 この課題解決に向け、RFID 等で利用されているニア フィールド通信の技術を導入し、アレイ状のプレーナコイ ルを用いたシステムの設計と実装を進めている。 一方、長期的な観点では、安価に大面積のデバイスを作 成できる有機半導体を用いたプリンテッドエレクトロニク ス技術との連携が重要になると考えている。現在は寿命、 動作速度、集積度の観点からMagic Surfacesのすべての機 能をプリンテッドエレクトロニクス技術により実現するこ とは困難であるが、このような技術は実験室レベルを超え て高密度・大面積センサネットワークを構築する際にキー となる技術であると考えている。 ヒューマンインタフェース学会誌 Vol.10 No.4 2008 (31) [1] 南正輝, 森戸貴, 鞍掛隆一, 鈴木渉, 渡辺貴文, 猿渡俊 介, 森川博之: デプロイメントスケーラブルセンサネッ トワーク, 電子情報通信学会技術研究報告,USN200713, 2007. [2] M. Minami, T. Morito, H. Morikawa, T. Aoyama: Solar Biscuit: A Battery-less WirelessSensor Network System for Environmental Monitoring Applications, Proceedings of the 2nd International Workshop on Networked Sensing Systems, 2005. [3] P. Dutta, J. Hui, J. Jeong, S. Kim, C. Sharp, J. Taneja, G. Tolle, K. Whitehouse, D. Culler: Trio: enabling sustainable and scalable outdoor wireless sensor network deployments, Proceedings of the 5th International Conference on Information Processing in Sensor Networks, 2006. [4] J. Hightower, G. Borriello: Location Systems for Ubiquitous Computing, IEEE Computer, Vol.34, No.8, pp.57-66, 2001. [5] Y. Nishizawa, K. Hirasawa, H. Morikawa, T. Aoyama: MAGIC-Surfaces, Magnetically Interfaced Surfaces for Smart Space Applications, Adjunct Proceedings of the 3rd International Conference on Pervasive Computing, 2005. [6] J. Scott, F. Hoffmann, M. Addlesee, G. Mapp, A. Hopper: Networked Surfaces: A New Concept in Mobile Networking, ACM Mobile Networks and Applications, Vol.7, No.5, pp.353-364, 2002. [7] M. Fukumoto, M. Shinagawa: CarpetLAN: A Novel Indoor Wireless(-like) Networking and Positioning System, Proceedings of the 7th International Conference on Ubiquitous Computing, 2005. [8] J. Lifton, D. Seetharam, M. Broxton, J. Paradiso: Pushpin Computing System Overview: A Platform for Distributed, Embedded, Ubiquitous Sensor Networks; Proceedings of the 1st International Conference on Pervasive Computing, 2002. [9] K. Van Laerhoven, A. Schmidt, H. Gellersen: Pin&Play: The Surface as Network Medium, IEEE Communications Magazine, Vol.41, No.4, pp.90-96, 2003. [10] P. Steure, M. Srivastava: System Design of Smart Table, Proceedings of the 1st IEEE International Conference on Pervasive Computing and Communications, 2003. [11] J. Patten, H. Ishii, J. Hines, G. Pangaro: Senstable:A Wireless Object Tracking Platform for Tangible User Interfaces, Proceedings of the CHI2001 Conference on Human Factors in Computing Systems, 2001. [12] Sensopad Website: http://www.sensopad.com/. [13] T. Someya, T. Sekitani, S. Iba, Y. Kato, H. Kawaguchi, T. Sakurai: A Large-area, Flexible Pressure Sensor Matrix with Organic Fieldeffect Transistors for Artificial Skin Applications, Proceedings of the National Academy of Sciences of the United States of America, Volume 101, Issue27, 2004. [14] T. Someya, S. Iba, Y. Kato, T. Sekitani, Y. Noguchi, Y. Murase, H. Kawaguchi, T. Sakurai: A Large-Area, Flexible, and Lightweight Sheet Image Scanner Integrated with Organic Field-Effect Transistors and Organic Photodiodes, 特集 Proceedings of the IEEE International Electron Devices Meeting, 2004. [15] N. Yamahira, Y. Makino, H. Itai, H. Shinoda: Proximity Connection in Two-Dimensional Signal Transmission, Proceedings of the SICE-ICASE International Joint Conference, 2006. [16] T. Sekitani, M. Takamiya, Y. Noguchi, S. Nakano, Y. Kato, K. Hizu, H. Kawaguchi, T. Sakurai: A Large-area Flexible Wireless Power Transmission Sheet Using Printed Plastic MEMS Switches and Organic Field-effect Transistors, Proceedings of the IEEE International Electron Devices Meeting, 2006. 著者紹介 南 正輝(みなみ まさてる): 1996年芝浦工業大学工学部電子工学科卒業。2001年東 京大学大学院工学系研究科電子情報工学専攻博士課程修 了。工学博士。2006年∼2007年スイス・ローザンヌ連邦 工科大学客員研究員。2003年∼2007年芝浦工業大学工学 部電子工学科講師。2008年より東京大学先端科学技術研究 センター准教授。電子情報通信学会会論文賞、電子情報通 信学会学術奨励賞各受賞。IEEE、電子情報通信学会、情報 処理学会各会員。 森川 博之(もりかわ ひろゆき): 1987年東京大学工学部電子工学科卒業。1992年同大学 院博士課程修了。工学博士。2006年東京大学大学院工学系 研究科電子工学専攻教授。現在、東京大学先端科学技術研 究センター教授。1997∼ 1998年コロンビア大学客員研究 員。2002∼2007年情報通信研究機構横須賀無線通信研究 センターモバイルネットワークグループリーダ兼務。コン ピュータネットワーク、ユビキタスネットワーク、モバイ ルネットワーク、フォトニックインターネットなどの研究 に従事。電子情報通信学会論文賞(2回) 、情報処理学会論 文賞、情報通信月間推進協議会情報通信功績賞など受賞。 電子情報通信学会フェロー。IEEE、ACM、ISOC、情報処 理学会、映像情報メディア学会各会員。 (32) ヒューマンインタフェース学会誌 Vol.10 No.4 2008
© Copyright 2026 Paperzz