閉ループ制御を有する制振構造物のシステム同定
SYSTEM IDENTIFICATION OF A BUILDING
EQUIPPED WITH A CLOSED-LOOP CONTROL SYSTEM
上林雅子*,三田彰**
Masako KAMIBAYASHI*, Akira MITA**
The purpose of this paper is to identify the dynamic properties of a building with an active control device for the case when
the control device is in operation. We utilize the Output Inter-Sampling Approach for system identification as a theory for
closed-loop system identification which has been applied in other engineering fields. A building equipped with an active
control device (AMD) which has a linear motor as an actuator is considered as an example. The accuracy of our approach was
carefully examined by the numerical analyses and experiments. Our proposed approach was found to be suitable for online
system identification tools for systems with feedback control devices.
Keywords: System identification, Closed-loop identification, Output inter-sampling approach, Subspace identification
システム同定,閉ループ同定,出力インターサンプリング,部分空間法
1.序論
造物も,出力をフィードバックさせて制御する制御器を含んでいるの
近年,建築分野では制振構造物に代表されるような制御機構を含む
で閉ループシステムということができる.建築分野においてもこのよ
装置が多く導入され,建物のスマート化が進展している.こうした装
うな閉ループ同定のニーズが高まってきている.開ループ同定手法を
置を内含する場合,保守性や制御効率の観点から,変動する対象や動
閉ループシステムにそのまま適用しようとすると,雑音信号と入出力
作環境に応じた制御器の最適化のために稼動中の対象の変動をオン
信号が相関を持つこと 2)や,入出力データ行列のランク落ちによる可
ラインで検出できることが望ましい.
同定性の欠如など,困難な問題が生じる.この問題を解決し,閉ルー
出力をフィードバックして振動制御を行う制振構造物は,閉ループ
プ制御されている構造物の動特性をオンラインで求め,その結果を反
特性を有することになる.このため,制御時の応答情報に基づいてシ
映させて制振装置を調整すれば,より効率の良い制御が期待できる.
ステム同定を行う場合,構造物(制御対象),制振装置(制御器)を
構造物を対象とする閉ループ同定問題に関する既往の研究としては,
含む制御システム全体が同定対象となり,同定入力の選定や同定手法
規約分解表現による手法を利用し,閉ループを 2 つの開ループシステ
によっては,制振装置の影響を取り除いた構造物の特性を推定するこ
ムに分離することで問題を解決する方法 3)が挙げられるが,システム
とが困難となる.実システムの場合には,簡便で信頼性の高い方法と
の入出力データ以外の外乱の情報を必要としていることと,数値的に
して,制振装置を加振器とする開ループ振動実験を行うことが多い.
複雑であるため,簡易な同定手法とは言い難い.
しかし,この場合は制振装置としての役割を止めるため,制振装置稼
本研究は,閉ループを有する制振装置が稼動時に構造物の動特性同
働時の構造物の動特性変化を同定することはできず,また通常は竣工
定を行うことを目的とし,簡易に実装可能な閉ループ同定手法として,
時のみに可能である.稼働時に同定を行う方法はいわゆる「閉ループ
他の工学分野で適用されている「出力インターサンプリングに基づく
同定(Closed-Loop Identification)
」として,制御・同定分野ではニー
方法」4),5),6)を用いる.この方法は出力を入力よりも高速にインターサ
ズの高い研究領域として近年盛んに研究が行われている.
ンプリングすることによって,従来の閉ループ同定問題を解決するこ
閉ループ同定とは,「閉ループ制御されているシステムの入出力特
とができる.実装にあたっては,制御システムの出力のみを高速にサ
性を同定する」ことをいう.一般的に,システム同定という場合,フ
ンプリングするというロジックの追加だけで簡易に実現できるとい
ィードバックループの存在しない「開ループ」システムを対象として
う利点をもつ.この手法を適用し,リニアモータをアクチュエータと
1)
おり,多くの論文 でもそのことを前提としているものが多い.しか
するアクティブマスダンパ(AMD)を有する制振構造物を対象とし
し現実には,しばしばシステムはフィードバックループの存在する,
て,制振装置および構造物,それぞれに対して同定アルゴリズムを構
「閉ループ」システムで動作している.本研究の対象物である制振構
築し,その性能をシミュレーションと実験によって検証する.なお,
*
東日本旅客鉄道株式会社(元慶應義塾大学大学院生)
East Japan Railway Company (Former Graduate Student, Keio University)
**
慶應義塾大学理工学部システムデザイン工学科 教授・Ph.D.
Prof., Dept. of System Design Engineering, Keio University, Ph.D.
基本モードのみの制御を対象とする建物では,1 質点モデルでの検討
グする「出力インターサンプリング」を用いることによって,従来の
で概略の性状を把握することが可能であるので,本論文では 1 質点モ
可同定性を必要とすることなく,ノイズを含むシステムの入出力デー
デルを用いた検討とした.
タを用いて閉ループ状況下でもシステムの離散時間モデルを同定す
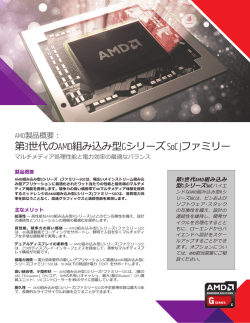
ることができる.図 2 に制振構造物の閉ループシステムのブロック線
2.閉ループを持つ制振構造物の同定
図を示す.u (mT ), y (mT ), v(mT ), e(mT ) はそれぞれサンプリング間隔 T
2.1
の,制御力,構造物の出力,外乱,出力ノイズである.構造物に対し
閉ループ同定の一般的アプローチ
閉ループ同定に関しては,他の工学分野において,既に様々な研究
て入出力データ {u, y} は同じサンプリング間隔 T で取得される.この
成果が報告されている.これらはそのアプローチによって,直接法,
ようなサンプリング間隔 T に対応するモデルを以下では T−モデルと
間接法,入出力結合法に大別できる 2).システムの入出力データのみ
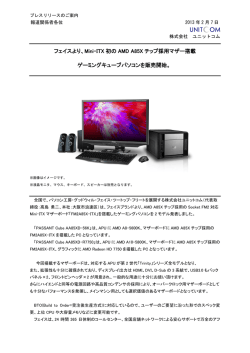
呼ぶ.これに対し,出力インターサンプリングによって表現される閉
から直接システムモデルを同定する「直接法」は,ノイズと制御入力
ループシステムを図 3 に示す.制御サンプリング間隔 T の 1/p(p は
とが相関をもつことによるバイアスの発生 2),可同定性条件の欠如な
自然数であり,インターサンプリングレートと呼ぶ),すなわち間隔
どから,実際には非常に難しい問題とされてきた.この可同定性条件
Δ=T/p で,高速サンプリングされた出力を y (k∆) とし,同様に外乱
とは,簡単に言えば,「閉ループ制御器の次数がシステムの次数より
と出力ノイズを v(k∆), e(k∆) とする.サンプリング操作はすべて同期
も高いこと」を要求している
7),8)
.しかし現実には,制御器の次数は
をしており,pΔ毎にサンプルされた出力は AMD へ入力されるので,
システムの次数より低いのが一般的であり,可同定性条件が成立しな
AMD の設計自体にはインターサンプリングは全く影響を与えず,制
い.しかも,目標値変化が全くない状況での同定は PE 性条件が満た
御力 u (k∆ ) は T 時間一定値となるため, u (mT ) = u (mT + ∆) = L
されないために,ほぼそのままでは同定は不可能となる.一方,目標
= u (mT + ( p − 1)∆) となる.以下,サンプリング間隔Δに対応するモ
値のような外部励振信号からシステム出力までの閉ループ系全体を
デルをΔ−モデルと呼ぶ.
同定することによりシステムモデルを求める「間接法」は,制御系に
擾乱を与えることで実現する.
本手法を使って,Δ−モデルが同定できれば,T−モデルへの変換
は容易である.さらに,サンプリング間隔Δで表現した 1 入力 1 出力
制振装置としてアクティブマスダンパ(AMD)を内含する制振構
(SISO)モデルは z 変換を用いて図 4 に示すような間隔 T で表され
造物の線形時不変離散時間システム表現を(1)式に,ブロック線図を
る 1 入力多出力(SIMO)モデルにより表すことができる.ここで,
A( z −1 ) は共通分母多項式, B j ( z −1 ) ( j = 0,L, p − 1 )は分子多項式
図 1 に示す.
x k +1 = Ax k + B u u k + Bv k
(1)
y k = Cx k
であり, y (mT + j∆ ), e(mT + j∆ ) をそれぞれ y j (m), e j (m) で表す.図 4
から明らかなように,AMD にフィードバックされるのは y 0 (m) のみ
ここで,x は状態ベクトルであり,出力を y,制御入力を u,外乱を v
で,それ以外の p-1 個の出力については,入力に対して開ループシス
とする.簡単化のため,出力ノイズは無視する.構造物はシステム行
テムとなる.これにより,入力 u (mT ) と出力ノイズ e1 (m),L e p−1 (m) は
列(A,B,C)で記述され,
(Ac ,Bc,Cc)で記述される AMD によ
無相関となり,従来は満たされなかった可同定性条件を必要とせず,
って生成される u に対し,入力行列 Bu がシステムに加わる.一般的
外部励振信号の PE 性条件がなくとも適用可能となる(未知ノイズに
なシステム同定は,入出力データ {v, y} を用いて開ループ同定を行う
よる PE 性を利用している).なお,実装する際には,出力のサンプ
が,その際同定されるシステムは制振装置を含む制振構造物全体が対
リング間隔を一定にして制御入力を pΔ時間の間一定にホールドす
象となる.これに対し,構造物のみを対象とする入出力データ
る(制御操作を間引く)ことで実現できる.ただし,p を大きくする
{[u, v], y} を用いて閉ループ同定を行おうとすると,前述したような問
と制御器の性能を劣化させる恐れがあるので注意が必要である.
題(バイアスの発生,可同定性条件の欠如)が発生し,構造物のみの
特性(A,B,C)を同定することが困難となる.
e(mT )
v(mT )
(b)
v
AMD
B
u (mT )
(a)
(T-model)
controller
u
Bu
+
+
x
y (mT )
structure
plant
y
A
C
図2
従来の閉ループシステム
AMD
based on A c , B c , Cc
図1
v( k∆ )
制振構造物の閉ループシステム
AMD
2.2
出力インターサンプリング
閉ループ同定の直接法として,出力インターサンプリングに基づく
e(k∆)
(b)
controller
u (mT )
(a)
y (k∆)
structure
(Δ-model)
plant
T = p⋅∆
同定法 4),5),6) が近年報告された.本方法は,システムへの入力(制御
器の出力)のサンプリングよりも高速にシステムの出力をサンプリン
図3
出力インターサンプリングによる閉ループシステム
e p−1 (m)
( )
A (z )
B p −1 z − 1
y p −1 ( m )
−1
M e ( m)
M
1
( )
( )
u (mT )
M
y1 ( m)
B1 z − 1
A z −1
e0 ( m )
( )
( )
B z −1
A z −1
}
(2)式に示すような出力フィードバック制御則を用いた.制御力は,
AMD の相対変位および相対速度をそれぞれ制御ゲイン Gk , Gc でフ
Open
loop
y0 (m )
ィードバックすることで生成される.ここで,制御ゲインはパッシブ
制御で代表される TMD(Tuned Mass Damper)と計算上擬似的に同等の
制御力が発生するよう,最適同調
2.3
つ.
u (t ) = −Gk (x s − x d ) − Gc (x& s − x& d )
(2)
Gk :変位フィードバックゲイン
SIMO 構造
同定の手順
に従って設計した.よって,
Gk , Gc は TMD のバネと減衰にそれぞれ対応する,物理的な意味を持
To feedback controller
図4
10)
Gc :速度フィードバックゲイン
シミュレーションモデルの各設定パラメータ及び制御ゲインを表
本研究では,出力インターサンプリングによって得られた入出力デ
ータに対し,部分空間法を用いることによって,風と地震による外乱
1 に示す.なお,構造物の固有振動数及び減衰比は後に使用する実験
装置と同値になるように設定した.
の影響を考慮した閉ループ同定を行う.それらの手順について以下に
説明する.
【STEP1】
表1
通常の同定では,同じサンプリング間隔で得られた入
シミュレーションに用いたパラメータ
設定パラメータ
出力データ {u (mT ), y (mT )} を利用するが,ここでは y (mT ) の代わりに
出力インターサンプリングにより得られた y (k∆ ) を利用する.これに
より,従来よりも出力の情報量が少なくとも 2 倍以上増え,閉ループ
同定で問題となるノイズの影響を減少させ可同定性条件を必要とし
制御ゲイン
ms [kg]
2.54
Gk [N/m]
548
md [kg]
0.123
Gc [Ns/m]
2.16
f s [Hz]
11.16
hs
なくなる.また,本研究では構造物に加わる代表的な外乱として,(a)
0.003
風と(b)地震の 2 通りについて考慮する.図 2,3 に示す通り,(a)風の場
合,外乱 v は構造物のみに加わる.それに対し,(b)地震の場合は基
ms : Mass of structure
礎から入力されるので,構造物および制振装置の両方に加わる.この
k s : Stiffness of structure
yd
xd
ことを考慮し, (a)風の場合は入出力データ {u (mT ), y (k∆)} を用い,(b)
cs : Damping coefficient of structure
地震の場合は { [u (mT ), v(k∆)], y (k∆)} を用いる.
md : Mass of AMD
【STEP2】
出力インターサンプリングによって得られた入出力デ
ータについて,部分空間法に基づく状態空間モデル同定法を用いる.
一般的には ARX モデルで代表される式誤差モデルが多く用いられる
xs
ms
cs
cd : Damping coefficient of AMD
x
u
md
ys
ks
: Displacement of AMD
yg
y : Displacement of structure
が,この場合,高振動数領域に重みがかかるため,低振動数領域での
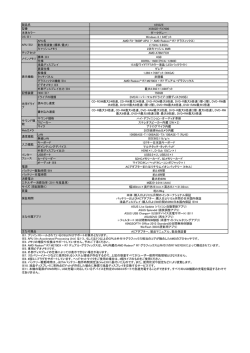
図5
同定精度が下がることが知られている.また,p を大きくすればする
シミュレーションモデル
ほど,出力データには高振動数成分が含まれ,デシメーションのよう
な信号処理が必要となる.しかし,これを行うと出力インターサンプ
3.2
閉ループ同定の検証
リングの情報が失われてしまうため,閉ループ同定手法としての利点
構造物に加わる代表的な外乱として,(a)風と(b)地震の 2 通りにつ
がなくなってしまう.このような問題を避けるため,ここでは数値的
いて考慮し,3.1 で設定したパラメータを使用してそれぞれシミュレ
に安定であり,多入力多出力モデルにも適用可能な部分空間法の一種
ーションによる構造物の閉ループ同定検証を行う.
である MOESP アルゴリズム を用いる.MOESP アルゴリズムでは
閉ループ同定検証を行う前に,制御効果を確認するため,(b)地震
入出力データからハンケル行列を構成し,QR 分解によりシステムの
の場合において開ループ同定を試みた.AMD のサンプリング周波数
ゼロ入力応答を求め,安定的な固有値分解を可能とする特異値分解に
を 500Hz に設定し,基礎に白色性信号であるランダム入力を加え,
基づきシステム行列,A,B,C,D を実現する手法である.推定された A
p=1 , 継 続 時 間 20 秒 で 応 答 を 算 出 し た . そ し て 入 出 力 デ ー タ
9)
行列の固有値解析から離散時間領域の極が得られるので,これを連続
{&y&g (mT ), &y&s (mT )} を用いて部分空間法により開ループ同定を行った
時間領域に変換することで,固有値が求められる.また,モードベク
結果を表 2,図 6 に示す.これは制振装置を含む 2 質点系として同定さ
トルは,A 行列の固有ベクトルに左から C 行列を乗じることで得ら
れ,図 6 において,非制御時と比較して制振効果が発揮されているこ
れる.
とが確認できる.
こうした手順によって,制振装置が稼働中における,制振装置およ
び構造物の閉ループ同定問題への適用について以下で検討する.
表2
シミュレーションによる開ループ同定結果
モード
固有振動数[Hz]
減衰比
3.シミュレーションによる検討
1次
9.84
0.051
3.1
2次
12.04
0.053
制振構造物モデル
図 5 に示すような,アクティブマスダンパ(AMD)を取り付けた
制振構造物を模擬したシミュレーションモデルを想定する. ここで,
表3
15
Amplitude
Uncontrolled
controlled
シミュレーションによる閉ループ同定結果
真値
風(p=1)
f s [Hz]
11.16
14.59
11.16
11.16
hs
0.003
0.493
0.003
0.003
10
風(p=2~10)
地震(p=2~10)
5
Red: Default Choice
0
0
0
図6
5
10
15
20
Frequency [Hz]
Log of Singular values
5
25
-5
-10
-15
-20
-25
-30
シミュレーション(p=1)による伝達関数( &y&s / &y&g )
-35
0
2
4
6
8
10
12
14
Model order
次にインターサンプリングレートを p=2~10(つまり出力のサンプ
図8
特異値分解の結果
リング周波数は 1,000~ 5,000Hz)と変化させて,構造物の閉ループ同
20
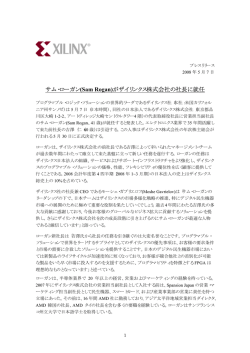
にあたる白色ノイズ(入力とは独立)と仮定し,継続時間 20 秒で応
答を算出した.(b)地震の場合を例にとり,p=4 の 0.05 秒区間を切り
Amplitude
定検証を試みる.外乱 v(k∆ ) はランダム信号,出力ノイズは入力の 2%
10
5
取った入出力データを図 7 に示す.制御入力 u e (mT ) が出力 y (k∆ ) に
0
0
対しホールドされていることが確認できる.
{
}
震の場合は入出力データ [u e (mT ), &y&g (k∆)], &y&s (k∆) の SIMO モデルに
対し,それぞれ部分空間法を用いて同定した.地震の場合(p=4)の
特異値分解の結果を図 8 に示す.この支配的な特異値を選択すること
でモデル次数を 3 として判断した.同様にそれぞれの場合においてモ
デル次数を選択した結果,表 3,図 9 に示すような同定結果となった.
5
10
15
20
25
10
15
20
25
Frequency [Hz]
200
Phase [deg]
(a)風の場合は入出力データ {u e (mT ), &y&s (k∆)} の SISO モデル,(b)地
true
P=1
P=2
15
100
0
-100
-200
0
5
Frequency [Hz]
図9
シミュレーション(p=1,2)による閉ループ同定結果
従来の同定法,つまり入出力データが同じサンプリング間隔である
p=1 の場合,同定結果にバイアスが生じた.これに対し,p=2~10 の
4.実験による検証
場合は,風,地震の場合ともに固有振動数および減衰比は真値と一致
4.1
実験概要
し,伝達関数からもその結果が読み取れ,本手法の有用性が確認でき
図 10 に本研究で用いた実験装置 11)の外観を,図 11 にその概念図を
る.なお,インターサンプリングレートは p≧2 であれば十分である
示す.本実験装置はリニアモータをアクチュエータとするアクティブ
ことも示されたが,p≧10 とするとシミュレーターシステムの負荷が
マスダンパ(AMD)制御システムである.構造物及び制振装置の諸
高く,算出できない状態となった.
元は表 4,5 のとおりである.デジタル制御器で生成された制御指令電
以上のように,風や地震の外乱の影響を考慮した制振構造物におい
て,開ループシステムでは従来通りの p=1 で同定可能であることに
対して,閉ループシステムでは p=1 では同定が困難であるが p≧2 で
は精度よく同定可能となり,出力インターサンプリングの有用性が示
y(kΔ) [V]
された.
発生する.既知パラメータとして構造物及びマスダンパの質量が与え
られ,観測量としては(1)基礎部加速度 &y&g ,(2)構造物絶対加速度 &y&s ,
(3)マスダンパの相対変位 x d − x s ,(4)制御指令電圧 u e がある.なお,
非制御時の構造物の特性は開ループ同定により,固有振動数
0.2
f s =11.16[Hz],減衰比 hs =0.003 と同定された.以下同定結果の比較の
0.1
際にはこの値を真値(True)として用いる.制御系は 3.1 と同様に設計
0
する(図 5,式(2)).ただし,制御ゲインはシミュレーション時と区
-0.1
-0.2
0
別するため, G k → g k , Gc → g c と変更して表記する.ここで使用す
0.01
0.02
0.03
0.04
0.05
1
Ue(mT) [V]
圧 u e はパワーアンプを介してリニアモータに印加され,制御力 u が
る g k , g c はそれぞれ相対変位,相対速度にかかる無次元のゲインであ
り,アクチュエータのコントローラの特性に依存する値である.また,
0.5
0
振動実験で行う加振方法はインパルス加振とランダム加振の 2 通り
-0.5
行なう.インパルス加振は,風を模擬する加振方法として,対象物を
-1
0
0.01
0.02
0.03
0.04
0.05
Time [sec]
図7
シミュレーションによる入出力データ(p=4)
小型のハンマーで約 1 秒おきに打撃する.地震を模擬する加振方法と
してはランダム加振を行い,信号発生器を用いて 0∼100Hz フラット
のランダム波を発生させ,基礎部(振動台)への入力とする.
表4
構造物の諸元
表5
制振装置の諸元*
相対変位 x d − x s を観測した.そして x d − x s より制御力 u を推定し,
Material
A-5052 Aluminum
Linear motor:30-06S(SWCC)
入出力データ {u e (mT ), u (k∆)} に対し,閉ループ同定を行った.その結
Dimension[m]
H:0.5,w:0.23,L:0.2
Linear bearing :LS-1390 (THK)
果,対象で必要となる振動数領域 11Hz 付近ではリニアモータの動特
m s [kg]
2.54
La [mH]
0.73
f s [Hz]
11.16
Ra [Ω]
3.36
hs
0.003
Ke [V・s/m]
3.0
Kf [N/A]
2.0
md [kg]
0.123
Stroke [mm]
20
性は線形とみなすことが妥当であることが確認された.
次に,最適な制御ゲインを決定するため,制御ゲインをそれぞれ変
化させたときの AMD の動特性を同定する.AMD のサンプリング周
波数 500Hz でマスダンパをインパルス加振し,p=4,継続時間 1.5 秒
で,変位フィードバックゲイン g k を 0.4∼0.7,速度フィードバック
ゲイン g c を 0.001∼0.01 の間で変化させた場合の相対変位 x d − x s を
観測した.そしてそれぞれの自由振動応答より,制振装置の動特性パ
*La;リニアモータ電機子コイルのインダクタンス
ラメータとして,固有振動数 f d と減衰比 hd を求めた.いま,制振装
Ra;リニアモータ電機子コイルの抵抗
置が保有する剛性を k d ,減衰を c d とすると,これは AMD を TMD
Ke;誘起電圧定数
に模擬した場合の,TMD のバネと減衰と同じ物理的意味を持つ(シ
Kf;推力定数
ミュレーションでは Gk , Gc と設定した).そこで,同定して得られた
f d から剛性 k d を,hd から減衰 c d を算出し,g k , g c に対する k d , c d
の関係を算出した.結果を図 13,14 に示す.図より,それぞれの関係
w
L
は線形であることが確認された.これは(2)式に示す制御設計での仮
定に整合する.
最後に,この線形近似から算出された最適な制御ゲイン g k =0.57,
H
g c =0.001 を用いた場合の振動台と構造物頂部の伝達関数を図 15 に
示す.非制御時と比較して,制御効果が発揮されていることが確認で
き,出力インターサンプリングによって,制振装置の動特性を安定的
全体
制振装置
図 10
に同定できたことが示された.
ue
Power Amplifier
xd − x s
md
u
ms
kd [N/ m ]
ue
制振装置の閉ループシステム
800
14
700
12
600
10
500
400
300
200
&y&g
6
4
0
0
0.4
実験装置の概念図
8
2
100
Shaking Table
図 11
図 12
Linear Motor
cd [Ns/m ]
&y&s
xd − xs , x&d − x& s
u
Digital Controller
A/D,D/A Board &
Control Computer
w
実験装置の外観
0.5
図 13
0.55
0.6
0.65
0.7
0
0.001 0.002 0.003 0.004 0.005
0.01
gc
gk
g kとk d の関係
図 14
g cとcd の関係
15
4.2
制振装置の閉ループ同定
Uncontrolled
controlled
ここでは,制振装置の最適な制御効果を得るために,制振装置の動
(センサやアンプ)の動特性が影響する.もしそれらの特性が設計当
時から不変であるならば,この作業は必要ないが,現実的には経年劣
化などにより何らかの特性の変化が生じるので,現在の特性を同定す
Amplitude
特性を同定する.制振装置にはアクチュエータやその他のデバイス
10
5
る作業が必要となる.制振装置は,前述したように,出力をフィード
バックさせるため,閉ループ系となる(図 12)
.そこで,出力インタ
ーサンプリングによる閉ループ同定手法を適用する.
はじめに,アクチュエータであるリニアモータの振動試験を行った.
AMD のサンプリング周波数を 500Hz に設定し,マスダンパをインパ
ルス加振し,p=4,継続時間 1.5 秒(およそ自由振動 1 回に相当)で
0
0
5
図 15
10
15
Frequency [Hz]
20
実験(p=4)から求めた伝達関数( &y&s / &y&g )
25
4.3
構造物の閉ループ同定
0.25
0.2
ンで同定する閉ループ同定を検証する.外乱は 4.1 に記した通り,(a)
0.15
風[インパルス加振]と(b)地震[ランダム加振]の 2 通りである.それぞ
れの振幅条件としては,インパルス加振は構造物絶対加速度が最大約
3.0[ m / s 2 ],ランダム加振は基礎部加速度が最大約 2.0[ m / s 2 ]となる
よう設定した.
それぞれの加振において,出力サンプリング周波数を 2,000Hz に設
Ue(mT) [V]
実験により,制振装置を稼働させたまま構造物の動特性をオンライ
0.1
0.05
0
-0.05
-0.1
3.91
3.92
図 17
継続時間 20 秒で振動実験を行った. p=4 の場合の,風;1.2 秒間,
Am plitu de
て示す.また,地震(p=4)の 0.05 秒区間を切り取った制御指令電圧
合に関しては,データの選定箇所によって固有振動数,減衰比ともに
同定結果が不安定な場合があった.これらの原因としては,入力であ
P h ase [de g.]
力データに対して部分空間法を用いて得られた同定結果を表 6,図 18
振動数に関しては精度よく同定することができた.しかし,地震の場
10
5
0
5
10
15
Fre qu e n c y [Hz]
20
25
0
5
10
15
Fre qu e n c y [Hz]
20
25
0
-50
-100
-150
る制御指令電圧に対する有色ノイズの影響が考えられる.シミュレー
ション時では入力 ue (mT ) が出力 y (k∆) に対しホールドされているこ
3.96
true
wind (impulse)
quake (random)
15
0
を図 17 に示す.そして,シミュレーションと同様,それぞれの入出
に示す.風,地震ともに減衰比に関しては同定誤差が大きいが,固有
3.95
実験による制御指令電圧(p=4)
20
地震;1.0 秒間切り出したデータを図 16 に示す.(a)では,上からマ
を示す.(b)でも同様にして,さらに一番下に基礎部加速度 &y&g を加え
3.94
Time [sec]
定し, p=4,10,つまり AMD を 500Hz,200Hz でそれぞれ稼働させ,
スダンパの相対変位 x d − x s ,構造物絶対加速度 &y&s ,制御指令電圧 u e
3.93
図 18
実験による閉ループ同定結果
とが明らかであったが(図 7),実験では,制御指令電圧に対するノ
イズの影響によりホールドの性能が悪化したと考えられる(図 17).
5.ノイズの影響の検討
また,p=10 の場合は AMD のサンプリング周波数が 200Hz と遅いた
実験において問題となったノイズによる同定精度の詳細検討を行
め,最適なゲインにも関わらず制御効果が十分に発揮されず同定に関
うため,シミュレーションによりノイズの混入位置や大きさ(レベル)
しても不安定であった.
を変化させた場合の同定精度への影響を調べる.ここで,インターサ
以上の結果より,風振動のような構造物の外壁に外乱を受ける場合
ンプリング p による同定精度への影響は少ないことが明らかとなっ
には,固有振動数に関して精度よく同定することができるが,地震動
ているので,p=4 の場合についてのみ,地震を仮定して行う.なお,
のような基礎から外乱を受ける場合には,用いた実験システムにおい
シミュレーションの継続時間はいずれも 20 秒とする.
ては制御指令電圧に加わるノイズの影響により同定精度が下がるこ
1)ノイズの混入位置と種類による検討
とが判明した.なお,インターサンプリングレートの選定は制御器の
性能を損なわないことを条件に設定する必要がある.
表6
出力ノイズについては3.2項で既に検討済みであるので,ここで
は同定に用いる入力信号(制御指令電圧 u e )に対してノイズが混入
実験による閉ループ同定結果
する場合について検討する.混入位置としては,①混入されたノイズ
地震(p=4)
が入力とともにフィードバックされる「プロセスノイズ」,②混入さ
f s [Hz]
11.16
11.08
11.16
れたノイズはフィードバックされずに同定時に用いる入力信号にの
hs
0.003
0.001
0.072
み影響する「観測ノイズ」の 2 種類が考えられる.①の場合,プロセ
0
2.2
2.4
2.6
2.8
3
0
-5
1.8
1
2
2.2
2.4
2.6
2.8
3
0
-1
1.8
2
2.2
2.4
2.6
2.8
Time [sec]
3
的には影響が少ないことがわかっている.そこで,例として分散が入
0
5.2
5.4
5.6
5.8
5.2
5.4
5.6
5.8
6
5.2
5.4
5.6
5.8
6
と一致したものの,有色ノイズの場合は同定結果にバイアスが生じた
(レベルによる同定誤差の検討を次項で示す)
.なお,有色ノイズは,
0
-2
5
の場合は誤差が固有振動数;0.01%以下,減衰比;10%以下で同定す
ることができた.一方②の場合,白色ノイズを混入させた場合は真値
0
-1
25
力信号の 100%となる白色ノイズと有色ノイズを混入させ同定を行っ
たところ,白色ノイズを混入させた場合は真値と一致し,有色ノイズ
5.2
(a) 風(p=4)
5.4
5.6
Time [sec]
5.8
(b)地震(p=4)
図 16
6
0
-5
15
ddY g[m / se c2]
d d Y s [m / s 2 ]
2
スノイズ自体もフィードバックされ,同定の際に評価されるので理論
2
-2
55
U e [V ] ddY s[m / se c2]
2
-2
1.8
5
U e [V ]
X d- X s[c m ]
風(p=4)
X d - X s [c m ]
真値
観測データ
6
固有振動数 100Hz,減衰比 0.1 の特性を持つ 1 質点系モデルに白色ノ
イズを入力として加えた時の出力として作成した.
以上により,ノイズの同定精度への影響は②観測ノイズかつ有色ノ
イズの場合に問題となることが明らかになった.実験においてもこの
影響により同定精度が低下した可能性が高いと考えられる.
ノイズ対策を行えば本手法は大型の実システムにも適用可能と推測
2)ノイズのレベルによる検討
分散が入力に対して 2%と 20%にあたるレベルを想定し,観測ノイ
される.
ズとして有色ノイズを混入させ同定を行った.結果を表 7,図 19 に
示す.固有振動数については,レベルが 20%の大きさでも誤差 3%以
参考文献
内に収めることが可能である.また,減衰比についてはレベルが小さ
1)
いほど真値に近づき,同定結果はレベル 2%では約 9 倍,レベル 20%
では約 11 倍となった. よって,ノイズ対策をして良いデータを取得
すれば固有振動数に関しては同定が可能であることがいえる.
以上,1)ノイズの混入位置と 2)レベルの検討により,実験における
同定精度の低下は観測ノイズの影響である可能性が高いことが判明
した.閉ループの中にノイズ源があるプロセスノイズの場合には,同
2)
3)
4)
5)
定精度への影響は少ないことが明らかとなった.さらに,固有振動数
については,ノイズレベルが 20%程度以下であれば精度よく同定す
6)
ることが可能であることが示された.制御力ではなく,制御指令電圧
を入力とするシステムを対象とするのであれば,コンピュータからの
制御指令電圧が確実にホールド可能な条件の下で,本手法を適用でき
7)
8)
る.実験結果を見ると,観測ノイズ対策をきちんとすれば本手法は大
型の実システムにも適用可能と考えられる.
表7
9)
観測ノイズのレベルによる同定結果
真値
レベル 2%
レベル 20%
f s [Hz]
11.16
11.40
10.86
hs
0.003
0.0269
0.0341
Am plitu de
20
10
5
0
P h ase [de g.]
true
level 2%
level 20%
15
0
5
10
15
Fre qu e n c y [Hz ]
20
25
0
5
10
15
Fre qu e n c y [Hz ]
20
25
0
-50
-100
-150
図 19
観測ノイズのレベルによる同定結果
6.結論
本論文では,閉ループ制御を有する制振構造物を対象として,閉ル
ープ同定となる制振装置と構造物の同定を行った.同定モデルに対し,
出力を入力よりも高速にインターサンプリングする出力インターサ
ンプリングをし,部分空間法の一種である MOESP 法を用いる同定ア
ルゴリズムを構築してシミュレーションおよび実験によりその有効
性を検証した.これにより,制振装置稼動時に構造物の動特性を同定
することが可能であることが示された.また,ノイズの同定精度に対
する影響について検討したところ,閉ループの内部に混入するプロセ
スノイズの影響はほとんど受けないものの,同定に用いる入力信号に
ノイズが混入し,特にその特性が有色である場合に精度が低下するこ
とが判明した.閉ループシステムから入力信号を取得する際に慎重な
10)
11)
Doebling, W., Farrar, R., Prime, B. and Shevitz, W. : Damage Identification and
Health Monitoring of Structural and Mechanical Systemes from Changes in their
Vibration Characteristics; a Literature Review. Los Alamos National Laboratory
1996.
Soderstrom, T.: System Identification, Englewood Cliffs, NJ; Printice-hall, 1989.
山田聖冶, 萩田裕介, 西谷章:閉ループ特性を有する制振構造物のシステ
ム同定;日本建築学会大会学術講演梗概集(関東),B-2, pp.291-292, 2001.
Sun, L., Liu, W., and Sano, A.: Over-Sampling approach to closed-loop
identification; Proc. 36th IEEE Conf. Decision and Control, 1253-1258 ,1997.
孫 連明, 佐野 昭:出力インターサンプリングに基づいた閉ループ同定;
計測自動制御学会論文集,Vol.35, No8, pp.1069-1077 ,1999.
孫 連明, 三宅 泰弘, 大森 浩充, 佐野 昭:直接法による不安定系の閉ル
ープ同定法と磁気浮上系への応用;計測自動制御学会論文集,Vol.36, No4,
pp.348-355, 2000.
Wellstead, P.E. and Edmunds, J. M.: Least-squares Identification of Closed-loop
Systems; Int. Journal of Control, 21(2), pp. 689-699, 1975.
Soderstrom, T. Gustavsson, I. and Ljung, L.:Identifiability Conditions for Linear
Systems Operating in Closed Loop, Int. Journal of Control, 21(2), pp. 243-255,
1975.
Verhaegen, M. and Dewilde, P.: Subspace model identification --- Part 1. The
output-error state-space model identification class of algorithms, Journal of
Control, 56(5), pp. 1187-1210, 1992.
Den Hartog, J.P.: Mechanical Vibration; 4th edn, McGraw-Hill, New York, 1956.
上林雅子,三田彰:部分空間法による制振構造物のシステム同定;日本
建築学会大会学術講演梗概集(北陸)B-2,pp. 983-984, 2002.
© Copyright 2026 Paperzz