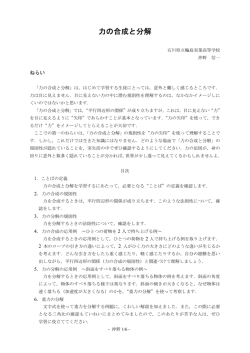
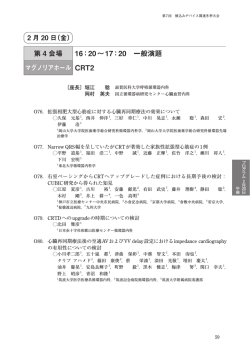
第 2 章フォトグラメトリーによる計測 Plotting 2.1 フォトグラメトリーに用いられる座標系 Use of coordinate systems (1) コンパレータ座標系 comparator coordinates コンパレータとは 0.001mm単位で写真座標を測定するために製作されたxとy軸が直角になった物差しのこ とである。コンパレータ座標系とは、従来の物差しでは水平方向を x 軸、それに直角なy軸とするxy数学座標 系で表される。デジタル写真測量では、コンパレータはデジタル画像を表示する CRT モニタが使われる。モニ タ座標系での座標原点は左上コーナーで、そこから右側に+x軸、座標原点から真下に+y軸になっている。モニ タは数学座標系ではない。コンパレータはアナログ写真のxy直角座標測定器であり、単写真のモノコンパレー タとステレオ写真用のステレオコンパレータの 2 種類がある。モニタの場合、0.1 画素単位以下で測定される。 図 2.1.1 Hugershoff のステレオコンパレータ 図 2.1.2 Pulfrich のステレオコンパレータ (2) 指標座標系 fiducial mark coordinates 指標座標系とは、4 隅の中心または画像における各辺中央の指標により画面の中心を原点とした座標系である。 たとえば、Leica の RC30 航空カメラの場合、4 個の指標の座標は単位mmで、1(106.000, 106.000), 2(106.000, -106.000), 3(-106.000, -106.000), 4(-106.000, 106.000)になっている。ただし、デジタルカメラの場合、指標はな く画像コーナーが指標となる。 (3) 写真座標系 photographic coordinates 写真座標系は主点を原点する座標系で、厳密には指標座標系とは若干違う。主点はレンズ収差がゼロになる点 である。主点の位置は共線条件式や DLT で求めることができる。指標座標系で観測した画像座標は、ヘルマー ト変換、又はアフィン変換により写真座標系に変換される。 (4) カメラ座標系 camera coordinates カメラ座標系xyzのxyは写真座標系xyと同じで、写真をポジ面におくと、カメラ座標系は xy(-f)となる。 ここで、f はカメラの焦点距離である。 (5) モデル座標系 model coordinates モデル座標系とは、2 枚一組のステレオ写真から構成される立体像を定義するための三次元直交座標系である。 原点及び座標系の取り方は、原点は左側投影中心とし両投影中心を結んだ方向を X 軸とする方法、左側投影中心 を原点としそのカメラ座標とする方法である。 (6) 地上座標系 object coordinates モデル座標系は、それぞれの点の相対的な位置関係を表すための任意の座標系である。地上座標系とは、国家 座標系に平行な座標系(たとえば平面直角座標系のxy軸を入れ替えた座標系)に変換した座標系のことである。 解析写真測量や CAD では、右手系の数学座標系を使用する。平面直角座標系の値xyzはyxz、UTM 座標 NEhは ENhに変換して使用する。 2.2 内部標定 内部標定とは、アナログ写真測量、デジタル写真測量も同じで、撮影されたときと同じ位置に画像を置くこと である。解析法では、コンパレータ座標系(CRT 座標系)から写真座標系(写真中心を原点にした座標系)に変 換することをいう。これにはヘルマート変換(2.4.1 項)またはアフィン変換(2.4.2 項)が使用される。内部標 定では、以下に示す共線条件を妨げる要因の補正も行う必要がある。 カメラ自体の幾何光学補正(アナログカメラ、デジタルカメラ) フィルムの幾何光学補正(アナログカメラのみ) コンパレータの幾何光学補正(アナログカメラのみ) ここでは、カメラの幾何光学補正の中でも最も誤差が大きいレンズ収差の補正について、その理論を 2.3.2 項 で説明する。また、本稿ではデジタル写真測量を前提としているため、フィルムの幾何光学補正およびコンパレ ータの幾何光学補正については、考慮しないことにする。 2.3 カメラ自体の幾何光学補正 camera correction for geographic optic 2.3.1 レンズ収差とは lens distortion レンズ収差とは、カメラのレンズディストーションが原因となり共線条件を妨げる要因のことをいう。レンズ 収差には、ラディアル(放射・半径)歪とタンジェンシャル(接線方向)歪あるいはデセンター歪の 2 つに分けら れる。 2.3.2 放射歪 radial linear distortion レンズ収差はレンズの製作誤差としてレンズ設計者によって検定され、計測用レンズではこれが小さく、また 明らかにされている。レンズ収差は 2 つの収差の、放射歪とデセンタリング(接線)歪に分けられる。これは写真 座標において以下のように補正される。 (これらレンズ収差は D. C. Brown, 1966, 1971, 1972 と John G. Fryer and D. C. Brown, 1986 (PE & RS, ASPRS)などを参考にした。) ∆r = K1 r3 + K 2 r5 + K 3 r7 + ⋯ ….. (2.3.2.1) ここで、r = √̅̅̅ x 2 + ̅̅̅ y 2 であり、(x̅, y̅)は主点を中心とした写真座標である。 写真座標へのレンズ半径の補正は次式で表される。 x̅ x̅ ̅ y ̅ y r r r r δx = ∆r = (K1 r3 + K 2 r5 + K 3 r 7 + ⋯ ) , δy = ∆r = (K1 r3 + K 2 r5 + K 3 r7 + ⋯ ) 2.3.3 ….(2.3.2.2) 接線(非対称)歪 tangential non-linear distortion Conrady モデル(1919, Monthly Notices of the Royal Astronomical Society)において非中心歪の成分であ る半径収差Δrと接線収差Δtは、主点を中心とした写真座標(x̅, y̅)に関して次のように表される。 ∆r = 3P(r)sin(φ − φo ) } ∆t = P(r)cos(φ − φo ) …(2.3.3.1) ここで、φは正のx軸と像点における半径ベクトル間の角であり、rは半径距離である。非中心ひずみのパラ メータはφo角であるx軸と最大接線収差軸間の角を表す。またプロファイル関数 P(r)は、 ...(2.3.3.2) P(r) = J1 r2 + J2 r 4 + ⋯ P(r) = (P12 + P22 )1/2r2 + (P12 + P22 )1/2 P3 r4 +⋯ ….(2.3.3.3) の形で表される。そのJ1 , J2 はプロファイル関数の係数である。次に示す(x̅, y̅)の成分(∆x, ∆y)は上の式と同じにな る。 ∆x = [P1 (r2 + 2x̅̅̅2 ) + 2P2 x̅y̅][1 + P3 r2 + ⋯ ] } ̅̅̅2 ) + 2P1 x̅y̅][1 + P3 r2 + ⋯ ] ∆y = [P2 (r2 + 2y …(2.3.3.4) ここで、新パラメータP1 , P2 , P3 はJ1 , J2 , φo で表される係数である。 P1 = −J1 sinφo P2 = −J1 cosφo } P3 = J2 ⁄J1 J1 = (P12 + P22 )1/2 } J2 = J1 P3 ⁄ tanφo = −P1 P2 …(2.3.3.5) なお、実務上接線収差においてP3 は微小量なのでP1 , P2 のみが使用される。 y Δt(x,y)=P(r)cos(φ-φo) P(r) x φo φo φφ y 主点 x 接線プロファイル 最大接線ひずみ軸 図 2.3.3.1 薄いプリズムモデルによる接線収差パラメータの幾何形状(Brown) 2.3.4 修正写真座標の計算 corrected photo coordinates カメラレンズに収差がある場合、たとえば天井からぶら下げた鉛直な紐の写真像は直線でなくなる。この画像 を用いて写真測量を行う場合には、その収差の影響を取り除かなければならない。解析写真測量を行う場合には、 写真座標は簡単に補正することができる。それは上に述べた半径収差と接線収差を用いればよいことになる。 x ′ = x + δx + ∆x = x + x̅(K1 r2 + K 2 r4 + K 3 r6 + ⋯ ) + [P1 (r2 + 2x̅̅̅2 ) + 2P2 x̅y̅][1 + P3 r2 + ⋯ ] } ̅̅̅2 ) + 2P1 x̅y̅][1 + P3 r2 + ⋯ ] y ′ = y + δy + ∆y = y + y̅(K1 r2 + K 2 r4 + K 3 r6 + ⋯ ) + [P2 (r2 + 2y …(2.3.4.1) ここで, x̅ = x − xo , y̅ = y − yo , r = [(x − xo )2 + (y − yo )2 ]1/2 であり、K1 , K2 , K 3 は半径収差の係数、P1 , P2 , P3は非中心性収差(接線収差)の係数である。 2.4 写真座標への変換 transformation of photo coordinates コンパレータ(または CRT)座標系で測定した画像座標は、主点を原点とする写真座標に変換する必要があり ます。その場合フィルムのもつひずみを、ヘルマート変換またはアフィン変換により補正する。そのときのパラ メータの数は、ヘルマート変換では縮率、回転、座標原点の移動の合計 4 個となる。これに対しアフィン変換で は、x 軸、y 軸の縮率、xy軸の非直交性(角)、回転、座標原点移動量の合計 6 個の要素となる。 また、アフィン変換ではxyの二次の項(写真のねじれ)を含んで、8 個のパラメータで表すこともできる。 デジタル写真測量以外では、スキャニングした地形図にジオコードをもたせるため、画像変換にアフィン変換ま たはヘルマート変換が用いられる。また、Geo-TIFF 画像のワールドファイル(TFW)は解像度と 4 パラメータ のアフィン変換式の係数で表すものである。 工事現場で工事用に設置した基準点における局地座標系を国家座標系(平面直角座標系)に変換する際、これら の変換が使用される。 2.4.1 ヘルマート変換 Helmert transformation ヘルマート変換は、二次元座標系同士の変換式であり、二次元の回転、原点の移動量、縮率を補正する変換で ある。ヘルマート変換式を式 2.4.1 に示す。ヘルマート変換式は 2 点以上の既知点があればパラメータ(a,b,c,d) が求められる。座標系の関係を図 2.4.1 に示す。 yk u 2-F y θ x 3-F y i xo v yo 1-F x 4-F xk 図 2.4.1 コンパレータ座標系(xk , yk )、CRT 画像座標系(u,v)と写真座標系(xf , yf ) xk = xf ∙ cosθ + yf ∙ sinθ + xo } yk = −xf ∙ sinθ + yf ∙ cosθ + yo ..........(2.4.1.1) または xk = a ∙ xf + b ∙ yf + c } yk = −b ∙ xf + a ∙ yf + d ……….(2.4.1.2) この式を解けば、縮率 S および回転角θは次式から求められる。 S = √a2 + b 2 , tanθ = a⁄b …………(2.4.1.3) 2.4.2 アフィン変換 affine transformation アフィン変換はヘルマート変換と同様の二次元座標系同士の変換式であり、x、y軸の縮率、xy軸の非直交 角、(以上にスキューひずみで考慮することもある)、回転角、座標原点の移動量を補正する変換である。アフィ ン変換では 3 点以上の既知点があれば 6 個のパラメータを求めることができる。 画像または画像を計測するコンパレータにおいて縦横の縮率を考慮すると、式 2.4.1.1 は次のように表すこと ができる。 x k = λx ∙ xf ∙ cosθ + λy ∙ yf ∙ sinθ + xo } yk = −λx ∙ xf ∙ sinθ + λy ∙ yf ∙ cosθ + yo .....(2.4.2.1) そこで、 a1 = λx cosθ , a2 = λy sinθ , a3 = xo , b1 = −λx sinθ , b2 = λy cosθ , b3 = yo とおくと、上の式は次のように表すことができる。 a1 a2 a3 xk xf yf 1 0 0 0 ) b (y ) = ( 1 0 0 0 xf yf 1 k b2 (b3 ) ........(2.4.2.2) この式はアフィン変換の観測方程式を表し、ヘルマート変換と同様にして最小 2 乗法によってその変換パラメ ータを解くことができる。求めたパラメータ(a1 , a2 , a3 , b1 , b2 , b3 )を用いて、全てのコンパレータ観測値を写真座 標(x, y)にするには、次式により計算できる。 a1 xf (y ) = (b f 1 a2 −1 xk − a3 b2 ) (yk − b3 ) .......(2.4.2.3) また、求めたパラメータより幾何学的な値は次式で算出できる。 λ2x = a21 + b12 λ2y = a22 + b22 −b a tanθ = a 1 = b2 1 2 xo = a3 yo = b3 } .......(2.4.2.4) なお、アフィン変換によるパラメータの数は、次に示すように 8 個まで増やすことができる。 xk = a1 ∙ xf + a2 ∙ yf + a3 ∙ xf ∙ yf + a4 } yk = b1 ∙ xf + b2 ∙ yf + b3 ∙ xf ∙ yf + b4 …(2.4.2.5)
© Copyright 2026 Paperzz