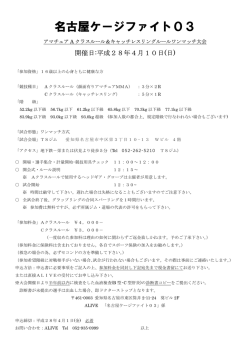
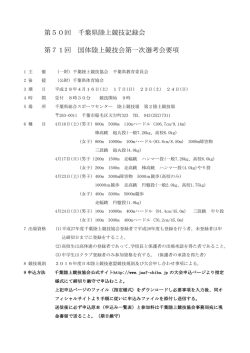
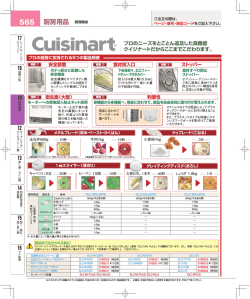
(公財)航空機国際共同開発促進基金 【解説概要 23-6】 この解説記事に対するアンケートにご協力ください。 日本における小型無人機の利用概況 1.概要 1-1.無人機とは 外見は、大型ラジコン模型飛行機と類似している。動力も、電動モーター、ガソリンエ ンジン、タービンエンジン等とほぼ共通である。大型ラジコン模型飛行機と大きな違いは ないが、操縦する人が飛行中に機体をコントロールするのではなく、無人機が自律飛行を 行い、操縦する人の視界外でも自由に飛行できるという利点がある。飛行時間も模型飛行 機では 30 分以内という短時間が主流であるが、無人機(UAV:Unmanned Air Vehicle) には 24 時間飛行できるタイプもある。 1-2.自律飛行とは 機体内に装備された GPS、姿勢制御システム、気圧センサー等によって、指定された高 度・速度・座標を正確に飛行することができる。気象条件が悪くなければ、指定された高 度・速度・座標から、高度差±5m、速度差±5km、座標±3m 以内の精度で飛行する。ま た、約 100~200 ヶ所のウェイポイント(通過地) を、それぞれの条件を入力することに より通過させることができる。 1-3.機体サイズ スケール比 1:1 の実機と同じサイズの機体から、主翼巾 30cm・重量 2kg 程度の機体ま である。ある会社では、主翼巾 4m・重量 50kg から、主翼巾 1.2m・重量 3kg までの、約 30 機ほどの無人機の開発・製作が手がけられてきた。最も利用されている機体は、この会社 の型式名で B 型機、B-Ⅱ型機と呼ばれ、それぞれ主翼巾 2.8m、主翼巾 3.2m の機体である。 これらの機体は、動力として 86cc ガソリンエンジン(馬力 7.2 PS)を装備している。サイ ズに関する明確な規格はないが、その会社では、エンジンサイズにより、40cc~100cc まで の機体を小型機、101cc~300cc までの機体を中型機、301cc 以上かつ機体重量が 70kg 以 上を大型機と位置づける。 以下では、無人機の開発・製造・運用で我が国の先端を走るある企業の開発の経緯の例を、 現在の状況を含めて取り上げる。 1 2.開発の歴史 2-1.機体の開発 2002 年 (1) トラクター型の機体の開発を行い、地上機ではなく河を利用した、水上機を製造した。 外部からの制御を一切行わず、内蔵した制御回路だけで 30 分間の飛行を行った。 エンジン: 50cc ガソリンエンジン/単気筒/2 サイクル 主翼長/全長/重量: 1.6m/1.5m/9kg (ドライ) (2) 陸上型機を開発・製造し、86cc 水平対向 2 気筒エンジンを採用した。エンジン出力を 上げるため、 チューンドパイプ型マフラーを使用し、 オリジナルの約 1.6 倍の出力 8HP を発揮した。 エンジン: 86cc ガソリンエンジン/水平対向 2 気筒 2 サイクル 主翼長/全長/重量: 2.4m/1.7m/12kg (ドライ) 2004 年 機体前方に、測定機・カメラ等を搭載するため、プッシャー型の機体である B 型機を開 発・製造した。 エンジン: 86cc ガソリンエンジン/水平対向/2 気筒チューンドマフラー付/ 内蔵式電動スターターを搭載 主翼長/全長/重量: 2.8m/2.3m/18kg (ドライ) 2005 年 (1) B 型より小型な A 型 UAV を開発・製造した。 エンジン: 43cc ガソリンエンジン/単気筒 2 サイクル 主翼長/全長/重量: 3.2m/1.8m/11kg (ドライ) この機体は、全体を軽量化し、カタパルトによって発進できることを目的と した。 (2) ぺイロードと荷重を増すため、大型 UAV 機体を製作した。 エンジン: 172cc/4 気筒/2 サイクル。 主翼長/全長/重量: 4.4m/3.3m/40kg (ドライ) (3) 長距離型として、A-2 型機を製造した。 エンジン:34cc/4 サイクル/単気筒ガソリンエンジンを前後に計 2 台搭載。 (4) 1000km を飛行できる機体として、A-3 型機を開発・製造した。 エンジン: 47cc/2 サイクルガソリンエンジン。 機体寸法: A-1 及び A-2 とほぼ同じ。燃料搭載量 15 リットル。 2 2006 年 (1) B-2 型機を製造。B 型機は運用面でもっとも優れていたため、この機体を大型化した B-2 型機を、開発・製造した。 エンジン: 86cc/2 サイクル/2 気筒ガソリンエンジン 出力: 7.5HP (中速回転の出力を向上した) 主翼長/全長/重量: 3.2m/2.6m/28~30kg (ドライ) (2) B-2 型機を双発にした機体を製造。 エンジン:47cc/単気筒/2 サイクルガソリンエンジンを主翼に 2 台搭載。 (3) 上記の 47cc では推力不足であり、また、ペイロードを増すため、86cc/2 気筒 2 サイ クルエンジンを主翼に 2 台搭載した。 機体寸法:B-2 とほぼ同じサイズ。 2007 年 電動 D 型機を開発。 カタパルトとパラシュートにより、広い離着陸地がない所でも運用できる目的で製造。 プッシャー型単発機とトラクター型双発機を開発。 モーター: ブラシレスモーター 主翼長/全長/重量: 1.8m/1.4m/3.5kg 飛行時間: 30 分~45 分 2008 年 大型 UAV を開発。 エンジン: 250cc 主翼長/全長/重量: 3.0m/2.1m/40kg (ドライ) 2010 年~2011 年 長距離用 UAV の開発を JAXA と共同で行い、E 型機として完成。22 時間/2500km の 飛行が可能となった。 ペイロード: 2kg を搭載。 エンジン: 75cc/4サイクル/単気筒ガソリンエンジン、5HP/6000RPM <以下、開発中> 2012 年 B-3 型機、タンデム型機を開発予定。 より安全性を高めるため、エンジンを前後に配置し、どちらか一方のエンジンが故障し ても安全に飛行できることを目的とする。 エンジン: 43cc/47cc/ガソリンエンジン各 1 台を直列に配置する。 2012 年~ タービンエンジン機 高々度 主翼長/全長/重量: 2.7m/2.6m/25kg (ドライ) 推力: 16kgf 3 2-2.エンジンの開発 2-2-1. BT-50 47cc/2 サイクル/単気筒ガソリンエンジン 2-2-2. BF-34 34cc/4 サイクル/単気筒ガソリンエンジン 2-2-3. BT-86 86cc/2 サイクル/水平対向 2 気筒ガソリンエンジン 運用高度 6000m まで飛行可能 2-2-4. BT-172 172cc/2 サイクル/水平対向 4 気筒ガソリンエンジン 2-2-5. BT-43 43cc/2 サイクル/単気筒ガソリンエンジン 2-2-6. BT-250 250cc/2 サイクル/水平対向ガソリンエンジン 2-2-7. BF-75 75cc/4 サイクル/単気筒ガソリンエンジン 低燃費型エンジンの開発 9000cc/時 (巡航時) このエンジンの開発により最長航続距離 2500~2600km の E 型機を完成した。 2-2-8. 発電器もエンジンと共に開発を進めてきた。 初期 20W/シャフトに直結型 40W~60W/ベルトドライブ型 100W~150W/シャフト直結型 自己の UAV に利用される電源だけではなく搭載機器の電力消費の増加に 伴ない、発電器の大型化が必要になってきたため、150W までの発電器を開 発した。 2-3.フライトコントロール (FCC) の開発 2002 年~2005 年 離着陸は手動で行い、機体の傾きは制御を行わず、100 ヶ所のウェイポイントを目標に 自動飛行を行った。初の 200km 飛行に成功した。 2006 年~2009 年 上記の FCC を改造し、自動着陸を可能にし、5m/s までの横風着陸が可能になった。 2010 年~2011 年 飛行中と姿勢制御を行い、自動離着陸が可能になった。着陸時、横風 10m/s まで安全 に運用できるようになった。 2012 年~2013 年 新型コントローラを開発中。 UAV の運用頻度が多くなるに伴い、航続時間が10時間を超え、飛行高度も 3000m ま でカバーするようになり、より安全性が求められるようになってきた。 そのため、FCC の2重化や実機との衝突防止システム等の開発計画を進めている。 2-4.サーボの開発 通常の模型用サーボの耐久時間は 60~80 時間であるため、無人機としては短かすぎた。 4 このため、耐久時間 1000 時間、入力電圧 10-15V を開発した。トルクは、6kgf・18kgf・34kgf の 3 種類である。 2-5.安全対策の開発 2-5-1. エンジン停止時に再スタートできる電動オンボードスターターを開発。 2003 年度から 2011 年の間、3 機種を開発、現在に至る。 2-5-2. エンジン停止時の対策 機体を安全な速度で滑空させ、指定した高度でパラシュートを開傘させる。 2-5-3. 燃料タンクに残量センサーを取り付け、計算値より消費量が多くなった場合、帰還 等が出来るシステムを開発。 3.小型無人機の民間利用現状 3-1.地磁気探査 3-1-1. 2006 年 3 月 西オーストラリア州で 500km の磁場観測を行った。 (国立極地研究所) 3-1-2. 2007 年 九州五島海上を延べ 1,000km にわたり高度 1,000m で観測を行った。 (国立極地研究所) 3-1-3. 2008 年 12 月 南極大陸、オングル海峡で 1 時間の気候、磁場観測を行った。 (国立極地研究所) 3-2.気象観測 3-2-1. 2003 年 黄砂の空中摂取を大分にて行った。 (九州大学/日本飛行機) 3-2-2. 2004 年 高度 4,000m までの観測を鳥海山にて行った。 (国立極地研究所) 3-2-3. 2005 年 高度 5,700m までの観測を北海道にて行った。 (国立極地研究所) 3-2-4. 2007 年 水平 1,000km 距離の観測を行った。 (国立極地研究所) 3-2-5. 2008 年 北海道サロマ湖で観測を行った。 (国立極地研究所) 3-2-6. 2 011 年 3,000m までの観測を行った。 (海洋研究開発機構) 3-3.火山観測用ビデオ撮影 3-3-1. 2003 年 桜島上空を観測 (国立極地研究所) 3-3-2. 2010 年 新燃岳を観測 (エアフォートサービス) 3-3-3. 2011 年 浅間山を撮影 (エアフォートサービス) 3-3-4. 2011 年 新燃岳にて高度 3,000m で水蒸気摂取 (産業技術総合研究所/エアフォートサービス) 5 3-4.放射線観測 3-4-1. 2011 年 福島上空にて測定 (エアフォートサービス) 3-4-2. 2012 年 福島上空にて測定 (株式会社情報科学テクノシステム) 6 3-5.写真撮影 3-5-1. 2003 年~2012 年 火山火口/災害地/福島原発上空 写真 1:浅間山火口 (高度 3000m から撮影。(株)エアフォート・サービス様ご提供) 写真 2:福島県・災害地 (高度 300m から撮影。(株)エアフォート・サービス様ご提供) 7 写真 3:福島第一原発 (高度 300m から撮影。(株)エアフォート・サービス様ご提供) 4.製作した実用機種 4-1.電動機 4-1-1. D 型プッシャー型機 4-1-2. D-Ⅱ型 双発 トラクター型 4-2.レシプロエンジン機 4-2-1. A 型機 単発機 47cc 2 サイクル ガソリンエンンジン 4-2-2. B 型機 単発機 86cc 2 サイクル ガソリンエンンジン 4-2-3. B-Ⅱ型機 単発機 86cc 2 サイクル ガソリンエンンジン 4-2-4. C 型機 双発 86cc 2 サイクル ガソリンエンンジン 4-2-5. E 型機 単発機 75cc 4 サイクル ガソリンエンンジン 4-3.タービンエンジン機 4-3-1. タービンエンジン機 ・ 機体 (Aviation 社製を改造) ・ エンジン タービンエンジン 推力: 16kgf 8 4-3-2. 機体写真 写真 4: B-II 型 写真 5: 南極観測に使用した無人機(国立極地研究所様の HP より) 9 5.機種別性能表 (A 型機/B 型機/C 型機/D 型機/E 型機) *製造年代順の開発機体 No. 種 類 エンジン 主翼長 ペイロード+燃料 機体重量 航続距離 1 単発機 50cc 1.8m 4.5kg 7.0kg 200km 2 単発機 86cc 2.2m 6.0kg 9.0kg 400km 3 単発機 86cc 2.4m 8.0kg 12.0kg 500km 4 タンデム型双発機 50cc/64cc 3.8m 12.0kg 25.0kg 500km 5 プッシャー式単発 172cc 4.4m 20.0kg 30.0kg 800km 6 水上単発機 86cc 2.2m 5.0kg 9.0kg 400km 7 B 型機 86cc 2.8m 17.5kg 17.5kg 1400km 8 C 型機 47cc x 2 2.8m 15.0kg 14.0kg 500km 9 双発機 長距離型 34cc (4 サイクル) 3.2m 4.0kg 8.0kg 1000km 10 A 型機 長距離型 47cc 3.6m 13.0kg 11.0kg 1200km 11 双発機 タービンエンジン推力 13kg x 2 2.3m 10.0kg 50.0kg 600km 12 D 型機 電動モーター 1.8m 1.0kg 3.0kg 80km 13 DⅡ型機 電動モーター 1.8m 1.0kg 3.0kg 80km 14 単発機 250cc (2 サイクル) 3.0m 25.0kg 35.0kg 500km 15 B 型機 86cc 2.8m 17.5kg 17.5kg 1400km 16 JAXA オープンラボ機 (超長距離型) 75cc (4 サイクル) 4.2m 24.0kg 25.0kg 2000km 17 A-Ⅳ型機 47cc 3.2m 13.0kg 28.0kg 500km 18 B 型機 (長距離型) 86cc 2.8m 16.0kg 28.0kg 1400km 19 DⅡ型機 電動モーター x 2 1.8m 1.0kg 3.0kg 80km 10 No. 種 類 エンジン 主翼長 ペイロード+燃料 機体重量 航続距離 20 CⅡ型機 86cc x 2 3.0m 15.0kg 35.0kg 500km 21 BⅡ型機 86cc 3.2m 13.0kg 30.0kg 500km 22 AⅣ型機 43cc 3.2m 8.0kg 15.0kg 400km 23 デルタ型機 34cc 1.8m 5.0kg 8.0kg 400km 24 E 型機 75cc 4 サイクル 4.2m 24.0kg 25.0kg 2600km 25 E 型機 86cc 4.2m 20.0kg 23.0kg 1600km 26 デルタ型機 15cc 1.6m 1.0kg 8.0kg 400km 27 三発機 47cc x1、 43ccx2 3.0m 15.0kg 35.0kg 500km 28 DⅡ型機 電動モーター x 2 1.8m 1.0kg 3.0kg 80km *上記開発機体の製造年代 No.1~No.3: 2002年~2003年 No.4~No.7: 2004年~2005年 No.8~No.13: 2006年~2007年 No.14~No.19: 2007年~2008年 No.20~No.24: 2009年~2010年 No.25~No.28: 2011年以降 11 この解説記事に対するアンケートにご協力ください。 6.目的別運用例 6-1. 火山観測 B、B-2 型 6-2. 火山灰採集 C、B 型 6-3. 地磁気測定 A、B 型 6-4. 初山林火災発見 A、D、D-2 型 6-5. 写真撮影 A、E、B、B-2 型 6-6. 写真測量 B-2 型 6-7. 気候観測 B型 6-8. 動画撮影 B、B-2、E 型 7.小型無人機の課題 7-1.現状の安全性 機体が何らかの故障等で飛行不能になった場合、機体ごとパラシュートで安全に降下さ せるシステムが備わっているため、通常の墜落発生の可能性が極めて低い。 7-2.将来の安全性 高度が 5,000m までと飛行高度の範囲が広いため、実機との衝突を避けるべく、現在は 航空局がノータムを発出し、無人機が飛行する時間帯と地域を知らせることで、運用され ている。将来的には、何らかの理由で実機に遭遇した場合、無人機が全自動で衝突回避飛 行を行えるシステムを開発することを考えている。 7-3.データ通信 現在の電波法の下では、地上と無人機間の通信距離は、10~20km 程であるため、デー タ及び、映像を数 10km は通信できるようなシステムを開発することが必要である。特に 動画をリアルタイムで通信できることが切望されている。方法としては、サテライトを利 用する方法があるが、ランニングコストが高価なため、民間での利用は制限を受けると思 われる。ランニングコストが安価な通信方法が必要となる。 12
© Copyright 2026 Paperzz