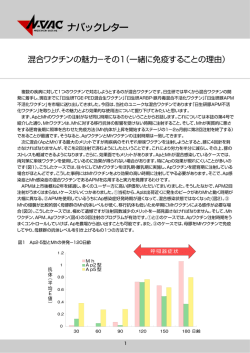
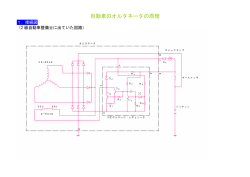
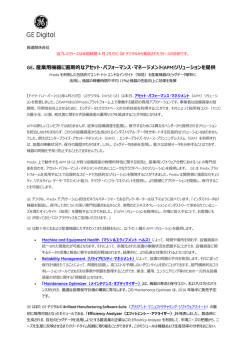
この端子は内部で 接続されています 必要数を接続 PM BEC 内蔵 ESC GPS 5VREG INPUT ジャンパーは 付けない 1 2 3 4 5 6 7 8 ローノイズ 電源出力 バッテリー プロポ 受信機 1=R00L/AILERON 2=PITCH/ELEVATOR 3=THROTTLE 4=YAW/RUDDER 5=MODE 6 ~ 8=OPTION 必要に応じて 6 ~ 8 を接続 I2C FORWARD MOTOR PWM 出力の受信機の場合 1 2 3 4 5 6 APM コントローラ APM2.6 INPUT ANALOG ローノイズ 電源を接続 +5V GND 1 2 3 4 5 6 7 8 サーボ,ジンバル その他への +5V 電源出力 1 2 3 4 5 6 7 8 AO A1 OUTPUT A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 SPI こちら側の +5Vはノイズが多くても OK! Telem. 切り離されています Arming( 起動)は 3THROTTLE=LOW で 4YAW/RUDDER= 右に 5 秒間。 (15 秒以内) DisArm(停止)は 4YAW/RUDDER= 左に 2 秒間。 5 秒以上でも Arm しない場合はなにかの センサーエラーを確認。 2-3 接続 +5V GND ローノイズ 電源を接続 PPM 出力の受信機の場合 プロポ 受信機 PPM OUT この接続で受信機の 1 ~ 8 までが APM に入力されます。 6 ~ 8 は APM の設定で使用可能です。 APM フライトコントローラ 受信機 ESC 接続図 Ver 1.0 Printed by JDC
© Copyright 2026 Paperzz