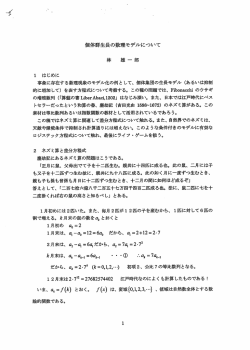
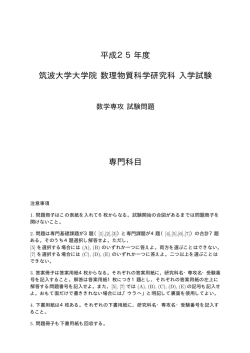
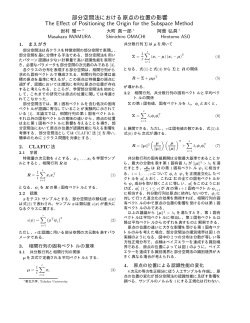
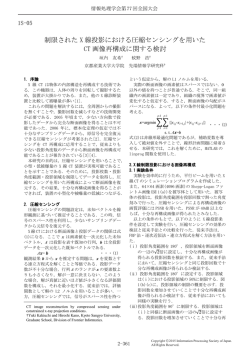
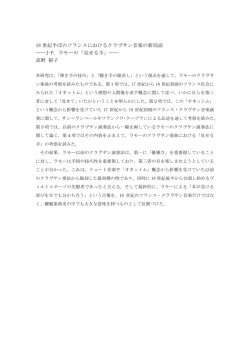
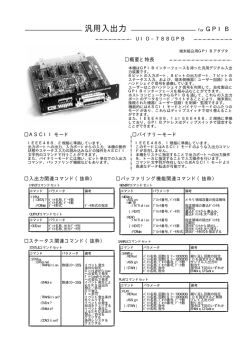
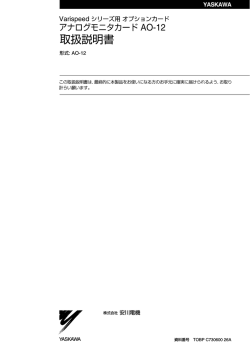
サンプル値制御理論による画像の解像度変換 Resolution Conversion of Digital Images via Sampled-Data Control Theory ○永原 正章 (京都大学), 山本 裕 (京都大学) M. Nagahara∗ , Y. Yamamoto∗ , Kyoto University∗ Abstract For handling digital images with different kinds of resolution, we have to convert their resolution. Conventionally, interpolation methods (e.g., bicubic) are used for this purpose. In applying these methods, it is generally assumed that the original analog images are fully bandlimited up to the Nyquist frequency. As a result, the converted images may be blurred. To solve this problem, we introduce the sampled-data control theory. By this theory, we can obtain interpolation taking account of the characteristic of original analog images. 1 はじめに 解像度の異なるデバイス間で画像データを取り扱った 帰着できることを示す. 2 問題設定 り,画像のサイズを変換するためには解像度の変換が 必要となる.画像の解像度変換には, 最近傍 (nearest 図 1 のサンプルレート変換器を考える.ここで自然数 neighbour) 法や双線形 (bilinear),双 3 次 (bicubic) 法 M1 と M2 は既約とする.まずサンプル周期 M1 h の離 などの補間法がよく用いられている [2].最近傍法は,補 間する点の輝度値を最も近傍の輝度値とする方法であ vd- φd ψd ud ↑ M1 K(z) ↓ M2 - り,0 次ホールドと同じ働きをする.一方,双線形法と 双 3 次法はそれぞれ,1 次および 3 次補間の一種であり, 双線形法では近傍の 4 点,双 3 次法では近傍の 16 点を 用いて補間を行う.最近傍法では単純に近傍の値をホー ルドするだけなので,処理は単純であるが画質は低い. 一方,双線形法や双 3 次法は計算は複雑であるが,画質 は良くなる. これらの手法は補間すべき点が 1 次や 3 次の多項式で 単純に近似できるとしている.これは,アナログの原画 像がナイキスト周波数以下に完全に帯域制限されている と仮定した上での議論である.しかし実際には,アナロ グ画像がそのような性質を持っているとは言いがたく, 図 1: Sample-rate converter 散時間信号 vd がアップサンプラ yd [l], ↑ M1 : yd → xd : xd [k] = 0, k = M1 l, l = 0, 1, . . . otherwise によってサンプル周期 h の離散時間信号 φd に変換され る.次に信号 φd はディジタルフィルタ K(z) によって 処理され,その出力 ψd がダウンサンプラ ↓ M2 : xd → ud : ud [k] = xd [M2 k] もとのアナログ画像の特性を活かした補間処理が望まれ る.実際,上記の双線形法や双 3 次法による解像度変換 では,原画像の高周波成分が除去され,ぼけた画像にな りやすい. そこで本研究では,画像の解像度変換にサンプル値制 御理論 [3] を導入する.すなわち,サンプル値制御理論 によって最終的にサンプル周期 M2 h/M1 の信号 ud に 変換される.このサンプルレート変換器を用いれば,画 像の解像度を M1 /M2 倍することができ,有理数倍の解 像度変換が達成される. 一方,サンプルレート変換器は図 2 のようにも構成で により,もとのアナログ画像の周波数特性を考慮し,ア きる.ここでシステム K1 (z)(↑ M1 ) はインターポレータ ナログ原画像と処理画像の誤差系の H ∞ ノルムが最小 であり,また (↓ M2 )K2 (z) はデシメータである.この構 となるような補間フィルタを設計する.サンプル値系で 成の利点はフィルタ K1 (z) と K2 (z) が前述のフィルタ ある誤差系に対して,ノルムが等しい離散時間の誤差系 K(z) に比べ低い次数で構成が可能である点である.本 研究では,サンプルレート変換器の設計において,フィ を導くことによって,設計問題は離散時間 H ∞ 問題に ルタ K(z) を直接設計するのではなく,インターポレー - ↑ M1 - K1(z) - K2(z) - ↓ M2 - Hh w +e y K2 図 2: Sample-rate converter ションフィルタ K1 (z) およびデシメーションフィルタ インターポレータの設計問題 する.図 3 のブロック線図を考える.入力信号 w ∈ L2 w F1 ↑ M1 φd ζ − K1 ζd れ,ダウンサンプラ ↓ M2 によってサンプル周期 M2 h の離散時間信号 ud に変換される.次に ud は 0 次ホー ルド HM2 h により連続時間信号 ζ となる.一方,離散 号に変換し,時間 m2 h (m2 ∈ Z+ ) だけ遅れたものを z + ed yd HM2 h 時間信号 wd を 0 次ホールド Hh によって連続時間信 zd Sh y SM1 h ud ef 号 wd はまずディジタルフィルタ K2 (z) によって処理さ まずインターポレータの (準) 最適設計問題を定式化 e−m1 hs ↓ M2 F1 図 4: Error system T2 K2 (z) を別々に設計する. 2.1 z e−m2 hs とおく.誤差を e := z − ζ とし ef := F2 e とする.入 − 力 wd から 誤差 ef までのシステムを T2 とおくと,設 計問題は次のように定式化される: 問題 2 安定かつ厳密にプロパーな F2 (s) および,アッ 図 3: Error system T1 プサンプラ定数 M2 , 遅れステップ m2 ,正数 γ2 が与 えられたとき, がアナログローパスフィルタ F1 (s) を通り y を得る.こ T2 := sup こで F1 (s) はアナログ信号 y の周波数特性を示してい wd る.次にこの信号はサンプル周期 M1 h で動作するサン プラ SM1 h によって離散時間信号 yd に変換される.こ の離散時間信号 yd はアップサンプラ ↑ M1 によってサ ディジタルフィルタ K1 (z) を通り,離散時間信号 ζd と 3.1 zd とおく.そして zd と ζd との差を ed := zd − ζd と し,w から ed までのシステムを T1 とおくと,フィル タ K1 (z) の設計問題は以下のように定式化される. 問題 1 安定かつ厳密にプロパーな F1 (s) および,アッ プサンプラ定数 M1 , サンプリング周期 h,遅れステッ プ m1 ,正数 γ1 が与えられたとき, T1 w2 T1 := sup < γ1 w∈L2 w2 (1) を満たすディジタルフィルタ K1 (z) を求めよ. 2.2 デシメータの設計問題 ここではデシメータの (準) 最適設計問題を定式化す る.図 4 のブロック線図を考える.ここでは,入力信号 はサンプル周期 h の離散時間信号 wd ∈ 2 である.信 (2) サンプル値制御理論によるフィルタ設計 3 だけ遅れたものをサンプル周期 h で離散化した信号を T2 wd 2 < γ2 wd 2 を満たすディジタルフィルタ K2 (z) を求めよ. ンプル周期 h の離散時間信号 φd に変換される.φd は なる.一方,連続時間信号 y が時間 m1 h (m1 ∈ Z+ ) ∈2 離散時間 H ∞ 問題への帰着 まず,離散時間リフティングを定義する. LN := (↓ N )[1 z . . . z N −1 ]T , −1 L−1 . . . z −N +1 ](↑ N ) N := [1 z 離散時間 LTI システム P (z) = C(zI − A)−1 B + D に 対して,システムの離散時間リフティングを LN (P ) := LN P L−1 N ⎡ N A ⎢ ⎢ C ⎢ ⎢ =⎢ ⎢ CA ⎢ .. ⎢ . ⎣ CAN −1 AN −1 B ... AB D CB .. . N −2 CA B .. . .. . ... .. . CB B ⎤ ⎥ 0 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ D とおく.また Fi (s) (i = 1, 2) の実現を (Ai , Bi , Ci , Di ) 定理の公式の詳細な計算は [5, 6] を参照されたい. とおき (ただし D1 = 0),次の作用素を定義する. 定理 1 より,問題 1 および問題 2 は,それぞれ,離散 1 および K 2 を求める 1 ブロック 時間 LTI フィルタ K B1 : L2[0,h) → R , B1 w := h n 0 eA1 (h−τ ) B1 w(τ )dτ, C2 : Rn → L2[0,h) , (C2 x)(t) := C2 eA2 t x, D2 : L2[0,h) → L2[0,h) , (D2 w)(t) := D2 w(t) + t C2 e 0 A2 (t−τ ) 1 の離散時間 H ∞ 最適化問題に帰着された.得られた K 2 から K1 および K2 を得るには,次の公式 および K を用いればよい [5]. 1 (z M1 ), K1 (z) = [1 z −1 . . . z −M1 +1 ]K B2 w(τ )dτ 2 (z M2 )[1 z . . . z M2 −1 ]T K2 (z) = K 上式より K2 の因果性が失われる可能性があるが,画像 このとき,次の定理が成り立つ. 定理 1 1. インターポレータ設計の誤差系 T1 に対 して次の関係式が成り立つ. 1 S)Fd1 T1 = (Dm1 − K (3) 処理への応用では,フィルタは非因果的であってもかま わない. 3.2 サンプルレート変換器 前節で設計したフィルタ K1 (z),K2 (z) を用いて,図 1 ここで のサンプルレート変換器を図 2 のように構成し,K(z) = −m1 Dm1 := LM1 (z Fd1 := LM1 Ad1 := eA1 h , ), Ad1 C K1 (z)K2 (z) とおく.このとき,誤差系 S := [1 0 . . . 0] Bd1 , 0 T := F2 e−mhs − HM2 h (↓ M2 )K(z)(↑ M1 )SM1 h F1 を考える.ここで,m = m1 + m2 である.設計された T Bd1 Bd1 = B1 B1∗ , K1 (z),K2 (z) に対して T1 = γ1 ,T2 = γ2 とおく. 1 := LM (K1 )[1 0 . . . 0]T K 1 誤差系 T のノルムに対して,次の命題が成り立つ. 2. デシメータ設計の誤差系 T2 に対して次の関係式 命題 1 が成り立つ. T ≤ γ1 γ2 + α1 γ1 + α2 γ2 + α3 2 ) T2 = Fd2 (Dm2 − H K (4) ここで α1 = F2 Hh , ここで Dm2 := LM2 (z −m2 ), H := [1 1 . . . 1]T Ad2 Bd2 , Fd2 := LM2 Cd2 Dd2 h A2 h Ad2 := e , Bd2 := eA2 τ dτ B, および AB ≤ AB を用いれば (5) が成り立つこ とがわかる. T1 T2 = F2 e−m2 hs Hh T1 + T2 Sh e−m1 hs F1 − T [Cd2 Dd2 ] [Cd2 Dd2 ] = [C2 D2 ] [C2 D2 ], 証明 次式と誘導ノルムの性質 A + B ≤ A + B 証明 ∗ 2 := [1 0 . . . 0]LM (K2 ) K 2 + F2 e−mhs (I − Hh Sh )F1 2 1. サンプル値系 T1 ∈ B(L2 , 2 ) に対して, この命題より,サンプルレート変換器の性能 T が評 LTI 離散時関系 Td1 ∈ B(2 , 2 ) が存在して,T1 2 = 価できる.すなわち,T < γ となるようなサンプル ∗ T1 T1∗ = Td1 Td1 = Td1 2 が成り立つ.ここ レート変換器を設計したい場合,まず T1 に対して最適 1 S)Fd1 である. で Td1 = (Dm1 − K 化を行い,T = γ が得られたとすると,この γ を 1 2. 上と同様にして,Td2 2 ) に対し = Fd2 (Dm2 − H K ∗ て,T2 2 = T2∗ T2 = Td2 Td2 = Td2 2 が成 り立つ. 2 α2 = Sh F1 , α3 = F2 (I − Hh Sh )F1 0 T (5) 1 1 用いて γ1 γ2 + α1 γ1 + α2 γ2 + α3 < γ を満たすような γ2 に対して T2 < γ2 となるように T2 を最適化すればよい. 3.3 2 次元フィルタの構成 前節で設計したフィルタは 1 次元である.これを画像 処理に適用するために,処理を 2 次元化する必要があ る.そこで,サンプルレート変換の 2 次元処理を分離可 能 (separable)[4] なものとする.すなわち 2 次元フィル タ K2D を K2D (z1 , z2 ) = K(z1 )K(z2 ) 図 6: Bicubic interpolation で構成する 4 設計例 ここでは,提案手法による解像度変換と従来法の Bicu- bic による解像度変換を比較する.設計のパラメータは 以下のとおりである. F1 (s) = 1 , (s + 1)2 h = 1, m1 = 2, F2 (s) = M1 = 2, 1 , s+1 M2 = 3, m2 = 3 図 5 のオリジナル画像に対して,M1 /M2 = 2/3 の解像 度変換を行う.図 6 は Bicubic 法による解像度変換に より得られた画像である.この処理には Photoshop CS [1] を用いた.いっぽう,提案手法による解像度変換を 図 7 に示す.従来法のぼけが提案手法によって改善され ていることがわかる. 図 7: Sampled-data H ∞ interpolation 参考文献 [1] Adobe Systems, Photoshop CS, Adobe Systems (2004) [2] K. R. Castleman, Digital Image Processing, Prentice Hall, (1996) [3] T. Chen and B. A. Francis, Optimal SampledData Control Systems, Springer, New York (1995) [4] W.-S. Lu and A. Antoniou, Two-dimensional Digital Filters, Marcel Dekker (1992) [5] M. Nagahara and Y. Yamamoto, “A new design for sample-rate converters,” Proc. of 39th IEEE Conf. on Decision and Control, pp. 4296–4301 (2000) 図 5: Original image [6] M. Nagahara and Y. Yamamoto, “Optimal design of fractional delay filters,” Proc. of 42nd IEEE 5 おわりに 本研究は画像処理における解像度変換のためのサンプ Conf. on Decision and Control, pp. 6539–6544 (2003) ルレート変換器の設計をサンプル値 H ∞ 設計問題とし [7] P. P. Vidyanathan, Multirate Systems and Filter て定式化し,誤差系をノルムに関して等価変換すること Banks, Prentice Hall, Englewood Cliffs, (1993) により離散時間 H ∞ 最適化問題へと帰着した.また,数 値例により,従来法よりもより良い処理が行えることを 示した.
© Copyright 2026 Paperzz