非 Gauss 過程の揺らぎのエネルギー論
金澤 輝代士
2012 年 1 月 18 日
概要
これまで,室温の水中の単分子といった微小系の熱力学構造を調べる揺らぎのエネルギー論は,
Gauss 過程のみを論じており,非 Gauss 過程を論じていなかった.これは確率過程特有な数学的
困難に起因する.非 Gauss 過程では,熱力学量を定義する確率積分が知られていなかったからで
ある.そこで本研究では,非 Gauss 過程での新たな確率積分を導入し,揺らぎのエネルギー論の
非 Gauss 過程に拡張した.
揺らぎのエネルギー論の定式化においては次の2点の数学的問題点がある:
• (1) 熱力学量の定義には,通常の計算規則が使用出来る解析方法が必要である.
• (2) 熱流の計算の際,多体デルタ関数の端点を含む積分値の特定が必要である.
本研究では問題点 (1) を解決する為に,伊藤解析と Stratonovich 解析とは異なる新たな確率解析
である ∗-解析を定式化した.∗-解析は有色ノイズからの白色極限として定式化されており,通常の
計算規則が使用出来る.∗-解析から伊藤解析に変換する公式を導出し,既存の解析方法との対応関
係を明らかにした.また,∗-解析を用いて多体デルタ関数の積分値を導出し,問題 (2) を解決した.
これらを用いて非 Gauss 過程の揺らぎのエネルギー論の定式化を行った.∗-解析を用いてエネ
ルギー流を熱流と仕事流に分離することに成功した.∗-解析から伊藤型への変換公式を用いること
で実験的な熱測定公式の導出に成功した.具体的な例として次の2つを扱った:
• (1)Poisson 熱浴中での Brown 運動,
• (2)Gauss 熱浴と Poisson 熱浴の間の熱伝導現象.
(1) のモデルを解析することで,非 Gauss 性が支配的になる為の条件の導出に成功した.また,(2)
のモデルを解析することで,同じ分散の熱浴間で熱流が定常的に流れる非自明な現象を発見した.
このことは,一般の微小系では分散を用いた熱浴の特徴付けが出来ないことを意味している.
次に,伊藤型確率過程においてもエネルギー論を定式化する為に,∗-解析を更に一般化した ⋆-積
を定義した.伊藤積との混合積を導入することで,伊藤型確率過程でも通常の計算規則が形式的に
成立する定式化が可能となる.また,高速な数値解析を行う方法論を議論した.⋆-積と伊藤積の混
合積を用いて,伊藤型確率過程でのエネルギー論を定式化した.これによって,幅広い確率過程に
対してエネルギー論を定式化することに成功した.
目次
第I部
序論と先行研究
5
第 1 章 はじめに
1.1
本研究の背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
微小系の非平衡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
6
1.1.2 揺らぎのエネルギー論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 数学的背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
本研究の動機と目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
7
7
本論文の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
8
1.1.1
1.2
1.3
1.4
6
記法について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 2 章 確率過程
2.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1
2.1.2
2.1.3
2.2
章の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
9
9
Markov 過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Markov 過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
11
Chapman-Kolmogorov 方程式 . . . . . . . . . . . . . . . . . . . . . . . . .
経路の連続性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
微分形の Chapman-Kolmogorov 方程式 . . . . . . . . . . . . . . . . . . . .
11
11
12
白色ノイズ (Gauss 過程) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2
2.2.3
2.2.4
2.3
2.4
2.5
素朴な意味での確率微分方程式 . . . . . . . . . . . . . . . . . . . . . . . .
9
9
不連続なノイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1
Wiener 過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
16
2.3.2
2.3.3
2.3.4
Wiener 過程での微積分 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
伊藤型確率微分方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Stratonovich 型確率微分方程式 . . . . . . . . . . . . . . . . . . . . . . . .
17
19
20
白色ノイズ (非 Gauss 過程) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1
Lévy 過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
24
2.4.2
2.4.3
2.4.4
Poisson 過程 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
伊藤-Lévy 分解 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
伊藤型確率微分方程式と伊藤の公式 . . . . . . . . . . . . . . . . . . . . . .
25
25
26
2.4.5 一般化 Fokker-Planck 方程式 (白色ノイズ) . . . . . . . . . . . . . . . . . .
有色ノイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.1 n 点モーメント関数と n 点キュムラント関数 . . . . . . . . . . . . . . . . .
27
28
28
Hänggi の公式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
一般化 Fokker-Planck 方程式 (有色ノイズ) . . . . . . . . . . . . . . . . . .
29
30
2.5.2
2.5.3
1
2.5.4
2.5.5
相関時間についての摂動論 . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.6
2.5.7
色付きノイズの近似としての情報ノイズ . . . . . . . . . . . . . . . . . . .
ノイズの強度についての摂動論 . . . . . . . . . . . . . . . . . . . . . . . .
Wong-Zakai の理論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 3 章 Gauss 過程での揺らぎのエネルギー論
3.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1
3.1.2
3.1.3
3.2
3.3
34
35
36
36
Brown 運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
揺らぎのエネルギー論 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
37
37
3.1.4 この章の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Langevin 方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
39
3.2.1
3.2.2
3.2.3
Underdamped Langevin 方程式 . . . . . . . . . . . . . . . . . . . . . . . .
Overdamped Langevin 方程式 . . . . . . . . . . . . . . . . . . . . . . . . .
揺動散逸定理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
39
40
3.2.4
分布関数の時間発展 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
41
熱力学第1法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1
3.3.2
3.3.3
3.4
平衡系の熱・統計力学 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
33
仕事・熱の定義 (Underdamped Langevin 方程式) . . . . . . . . . . . . . .
仕事・熱の定義 (Overdamped Langevin 方程式) . . . . . . . . . . . . . . .
平均熱流の積分表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
熱力学第2法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
42
43
擬似 Helmholtz 自由エネルギー . . . . . . . . . . . . . . . . . . . . . . . .
43
43
3.5
3.4.2 Helmholtz 自由エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Jarzynski 等式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
微小系の熱伝導 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
45
45
3.6
非 Gauss 過程に向けて . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.4.1
第 II 部
本論
47
第 4 章 非 Gauss 確率過程での ∗-積分
48
4.1
4.2
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
非 Gauss 過程での通常の計算規則 . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
48
4.3
∗-積分の定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 通常の計算規則 (The Ordinary Calculus) . . . . . . . . . . . . . . . . . . .
49
50
50
4.3.3
4.3.4
n 点デルタ関数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
伊藤積分への変換公式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
53
4.3.5
4.3.6
∗-積分と確率的 Liouville 方程式 . . . . . . . . . . . . . . . . . . . . . . . .
全微分の期待値の積分表現 . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
54
第 5 章 非 Gauss 確率過程での揺らぎのエネルギー論
5.1
5.2
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
熱力学第1法則 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
55
55
56
5.3
5.2.1
5.2.2
仕事・熱の定義 (Underdamped Langevin 方程式) . . . . . . . . . . . . . .
5.2.3
5.2.4
熱測定の公式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
分布関数の時間発展 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
57
5.2.5 平均熱流の積分表現 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Poisson 熱浴中の運動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
59
59
ATP 授受過程との対応 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
平均内部エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
60
5.3.4 物理的解釈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gauss 熱浴と Poisson 熱浴間の熱伝導 . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
63
64
定常熱流 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
物理的解釈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
68
非 Gauss ノイズの描像 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
5.3.2
5.3.3
5.4
5.4.2
5.4.3
5.5
仕事・熱の定義 (Overdamped Langevin 方程式) . . . . . . . . . . . . . . .
56
56
第 6 章 ⋆-解析と混合積
70
6.1
6.2
6.3
Stratonovich 積と伊藤積の混合積 . . . . . . . . . . . . . . . . . . . . . . . . . . .
⋆-積と伊藤積 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
⋆-積から伊藤積への変換公式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
71
73
6.4
6.5
⋆-積と伊藤積の混合積 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
伊藤型確率過程の chain-rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
75
6.6
6.5.1 伊藤型微分方程式の確率的 Liouville 方程式 . . . . . . . . . . . . . . . . .
∗-積分の数値解析の手法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
76
第 7 章 伊藤型 Langevin 方程式に対するエネルギー論
7.1
7.2
ノイズの定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
仕事・熱の定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 8 章 まとめ・今後の展望
8.1
結果のまとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
80
∗-解析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
非 Gauss 過程の揺らぎのエネルギー論 . . . . . . . . . . . . . . . . . . . .
80
80
8.1.3 ⋆-積と伊藤積の混合積 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.4 伊藤型確率過程の揺らぎのエネルギー論 . . . . . . . . . . . . . . . . . . .
今後の展望 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
80
80
8.2.1
8.2.2
∗-積分の収束性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
非 Gauss 過程での定常分布 . . . . . . . . . . . . . . . . . . . . . . . . . .
80
81
8.2.3
8.2.4
8.2.5
Helmholtz 自由エネルギー . . . . . . . . . . . . . . . . . . . . . . . . . . .
熱力学第2法則はあるか? . . . . . . . . . . . . . . . . . . . . . . . . . . .
微小系の温度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
81
81
8.2.6
8.2.7
Gauss 熱浴と Poisson 熱浴間の熱伝導 . . . . . . . . . . . . . . . . . . . . .
乗法的ノイズ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
82
8.2.8
量子系の揺らぎのエネルギー論 . . . . . . . . . . . . . . . . . . . . . . . .
82
8.1.1
8.1.2
8.2
78
78
78
3
謝辞
85
参考文献
86
4
第I部
序論と先行研究
第1章
1.1
1.1.1
はじめに
本研究の背景
微小系の非平衡
近年,コロイド粒子系,生物分子系といった,マイクロ・ナノスケールの微小非平衡系が注目を
集めている [1].実験技術の発展により,微小系の精密な操作が可能になったからである.目覚ま
しく発展した実験技術例に,微小系を精密操作するレーザーピンセット [2] 等が挙げられる.レー
ザーピンセットは光圧を利用して,サブミクロン粒子をトラップし,自由に操作を行うことがで
きる [3].これを用いて,コロイド粒子や生物分子を1粒子単位で操作することなどが可能になり,
実験の幅が大きく広がった.また,測定精度の向上も目覚ましい.事実、今までは時間スケールが
小さすぎて観察できなかったブラウン粒子の速度減衰 [5, 6] や,ランダム力の色付き効果 [4] を直
に観察することが可能になった.
この様に発展した微小系の実験技術を用いて,最新の非平衡理論の検証が幅広く行われている.
例えば,近年の目覚ましい非平衡理論に揺らぎの定理 [7, 8, 9],Jarzynski 等式 [10, 11],Harada-
Sasa 等式 [12] 等がある.これらの非平衡等式の検証は生物分子系でも行われている [13, 14, 15, 16].
1.1.2
揺らぎのエネルギー論
このようなマイクロ・ナノスケールの技術の発展により,微小系の物理を体系的に理解すること
が求められた.この為のアプローチの1つに,関本によって提唱された揺らぎのエネルギー論 [17]
がある.揺らぎのエネルギー論の目標とはマクロ系で成功を収めた熱力学をミクロスケールに適
用できる様に拡張し,微小系の操作を理解することである.即ち,生物分子モーター1分子やコ
ロイド粒子1粒子を微小熱機関と見なし,微小熱機関の操作限界,熱効率などを論じた.微小系
の Carnot 効率等が明らかにされ,微小系の理解が大きく進んだ.この際,ポイントとなったのは,
一回の試行について熱力学量を定義するということであった.通常の熱力学量はアンサンブル平均
を取った状態で定義される.これは熱力学極限を取った状態では揺らぎが消失するからである.し
かし,微小系を調べるときにはこの仮定が成立しない.事実,微小系では揺らぎが十分大きく,平
均量だけを用いた議論が出来ない.そこで,アンサンブル平均を取らない状態での熱力学量の定義
が必要とされた.関本はこの問題を揺らぎのエネルギー論の枠組みで解決した.具体的には,確率
変数としての仕事,熱の定義を行い,アンサンブル平均を取らない状態でも成立する微小系での熱
力学第1法則を導出した [18].この方法論は拡張され,一試行でのエントロピー変化を議論する,
エントロピー生成も定義された [19].
6
数学的背景
1.1.3
揺らぎのエネルギー論は,確率過程の数学を駆使して構築された.ノイズは特異的に振る舞う関
数であり,chain-rule, Leibniz-rule,部分積分公式といった計算規則が成立しない [20]. 以下,
chain-rule, Leibniz-rule, 部分積分公式等をまとめて通常の計算規則 (The Ordinary Calculus)
と呼ぶ.この為,どのように確率積分を定義するかが問題となる.確率積分には次の2つの有名な
定義がある.一つは伊藤積分であり,もう一つは Stratonovich 積分である [20].
揺らぎのエネルギー論は,白色 Gauss ノイズに駆動される系の場合については完成している.関
本によれば,Gauss 過程では,熱を定義する積分は Stratonovich 積分でなければならないとされ
ている [18]. それは,熱を Stratonovich 積分以外の積分を用いて定式化を行えば,熱力学第一法則
と整合しないからである.この主張は実験的にも確認され [21],データ解析などでも Stratonovich
解析を用いて行われている [13, 14, 15, 16].
1.2
本研究の動機と目的
さて,近年微小系の非平衡現象として非 Gauss ノイズ [22, 23] が報告されている.例えば,Gov
等 [23] は,赤血球の膜運動をポアソンノイズに駆動される Langevin 方程式を用いたモデルによっ
て特徴付けようとした.こういった非 Gauss ノイズに駆動される系のエネルギー論は議論されて
こなかった.その理由の一つとして,本論でも後述するが,非 Gauss ノイズでは Stratonovich 解
析を用いた熱の定式化が出来なかった点が挙げられる [24].また,熱流の計算には多体デルタ関数
の積分が現れるのだが,この積分の取り扱い法がわからなかった点も挙げられる.そこで,本論
文では非 Gauss 過程での揺らぎのエネルギー論を論ずるために新しい確率解析の手法を導入した.
具体的には,非 Gauss ノイズに駆動される系での「熱」を定義する為の確率積分を定義した.そ
れを用いて非 Gauss ノイズに駆動される物理現象の構造を調べた.
1.3
本論文の構成
本論文は【序論と先行研究】と【本論】の2部に分けられる.1∼3章は【序論と先行研究】で
あり4∼8章が【本論】である.
2章では,先行研究を理解するために必要な確率過程の技法が列挙してある.はじめに,Markov
過程の一般論を説明した.Markov 過程の理論を受けて白色 Gauss ノイズに駆動される確率微分方
程式を定式化した.続いて,白色非 Gauss ノイズや,有色ノイズに駆動される確率微分方程式も
取り扱った.3章では,直接の先行研究である Gauss 過程の揺らぎのエネルギー論を取り扱った.
Stratonovich 積分を用いて熱の定義を行い,熱力学第1法則を論じた.また,熱力学第2法則やい
くつかの物理的モデルなども取り上げた.
4章・5章は現在投稿中の論文 [24] の内容をベースに詳しく加筆した.4章は揺らぎのエネル
ギー論を非 Gauss 過程に拡張する為に必要な ∗-積分の定義を行った.∗-積分は色付きノイズの極
限として定義されており,通常の計算規則が使用出来る.∗-積分から伊藤積分への変換公式が導出
されており,既存の定式化との対応も明らかにされている.5章では ∗-積分を用いて,非 Gauss
過程の揺らぎのエネルギー論を論じている.∗-積分を用いて熱の定義を行い,熱力学第1法則の導
出を行った.また,いくつかの物理的モデルを扱い,非 Gauss 性が寄与する条件などの導出に成
功した.
7
6章・7章はそれ以後の発展である.6章では ∗-積分を更に一般化し,⋆-積と混合積の概念を導
入した.混合積を導入することで,伊藤型確率過程についても形式的に chain-rule を書くことが出
来るようになった.次に混合積を用いて,伊藤型確率過程についてのエネルギー論を7章で論じ
た.8章では本研究をまとめるとともに,今後の展望についても議論した.
1.4
記法について
本論文内で用いられている記法について言及する.確率変数にはハットを付ける.即ち,
⟨ ⟩ Â と書
けば, が確率変数であることを意味する.また,確率変数のアンサンブル平均を  と書く.
8
第2章
2.1
2.1.1
確率過程
はじめに
素朴な意味での確率微分方程式
本章では,確率過程に関する数学的議論を行う.確率過程とは,系の発展が確率的に決定される
過程のことである.例えば,溶媒に浮かぶ微小粒子の運動を考えよう.今,微小粒子の大きさは十
分小さく,溶媒分子から受ける力が無視できないくらいの大きさだとする.この場合,微小粒子は
溶媒分子からランダムな力を受ける.これはいわゆる Brown 運動である.溶媒分子の初期条件が
分からない以上,この運動は確率的に記述されるように思われる.これは確率過程の一例となる.
他にも,株価の運動,電気回路のノイズなども確率的に記述され,確率過程の例となる.
確率過程を記述する道具に確率微分方程式 (Stochastic differential equation) がある.例え
ば,Brown 運動の運動方程式がその一例である.Brown 運動は次の運動方程式によって次の様な
モデル化がなされる
m
d2 X̂(t)
dX̂(t) ˆ
= −γ
+ ξ(t),
dt2
dt
(2.1)
ˆ は溶媒か
但し,m はブラウン粒子の質量,X̂(t) はブラウン粒子の位置座標,γ は摩擦係数,ξ(t)
ˆ は確率的な項である.こういった微分
ら受けるランダム力である.この中に現れるノイズ項 ξ(t)
方程式を確率微分方程式という.これを一般化して,任意の関数 a(x), b(x) を用いた
dX̂(t)
ˆ
= a(X̂(t)) + b(X̂(t))ξ(t)
dt
(2.2)
という確率微分方程式を考えることが出来る.以下,本章ではこの式 (2.2) を考えていくものと
する.
2.1.2
不連続なノイズ
ˆ 図 2.1) が現れ
ところで,確率微分方程式 (2.2) には,時間的に不連続な関数であるノイズ ξ(t)(
ˆ に駆動される X̂(t) も特異的な挙動を示す.つまり,項 b(X̂(t))ξ(t)
ˆ は非解
る.この為ノイズ ξ(t)
ˆ を掛け合わせた項ということになる.この項が存在する為,確率微分方
析的な関数 b(X̂(t)) と ξ(t)
程式は数学的に注意深い計算を行う必要がある.実際,そこでは通常の計算公式は,ほとんどの関
数について成立しない.即ち,
「例外を排除するために数学をきちんと勉強する」というのではな
く,
「確率過程は計算規則が普通の微積分とまったく違う」と認識する必要がある.
2.1.3
章の構成
本章では確率過程の数学を以下の様な順番で議論する.まず,Markov 過程一般論の数学を議論
し,Markov 過程の基礎方程式である微分形の Chapman-Kolmogorov 方程式を導出する.次に
9
図 2.1: ノイズの不連続性
物理で最もよく扱われるノイズである Gauss ノイズと,その数学的表現である Wiener 過程を扱
う.伊藤型の構成法と Stratonovich 型の構成法をそれぞれ取り扱う.次に,微分形の Chapman-
Kolmogorov 方程式を用いて,非 Gauss ノイズの数学的表現である Lévy 過程を構成し,非 Gauss
ノイズ駆動の伊藤型確率微分方程式の取り扱いを説明する.また,非 Gauss ノイズの標準形を議
論する伊藤-Lévy 分解と導出する.最後に,色付きノイズの取り扱いを説明する.
10
2.2
Markov 過程
まず,最も基本的な確率過程である Markov 過程について説明する.以下の議論は Gardiner [20]
に沿って行う.
2.2.1
Markov 過程
今,t1 ≥ · · · ≥ τ1 ≥ . . . とし,時刻 t1 , . . . , tn に測定した量 ⃗
x1 , . . . , ⃗xn に対する確率分布関数
p(⃗x1 , t1 ; . . . ; ⃗xn , tn )
(2.3)
を考える.この確率分布の時間発展は遷移確率分布関数
p(⃗x1 , t1 ; . . . |⃗y1 , τ1 ; . . . ) ≡
p(⃗x1 , t1 ; . . . ; ⃗y1 , τ1 ; . . . )
p(⃗y1 , τ1 ; . . . )
(2.4)
によって特徴付けられる.特に次の性質がある確率過程を Markov 過程という
p(⃗x1 , t1 ; . . . |⃗y1 , τ1 ; . . . ) = p(⃗x1 .t1 ; . . . |⃗y1 , τ1 ).
(2.5)
これは時間発展の法則自体は過去の経路に依存しないことを示す.
Markov 過程は,時間相関を持たないノイズを扱う場合などに現れる.例えば,前述の自由ブラウ
ˆ ξ(s)⟩
ˆ
ン運動の例,式 (2.1) を考えよう.今,ノイズが時間相関を持たない場合,即ち ⟨ξ(t)
∝ δ(t − s)
とする.この確率過程は Markov 過程で書ける事が証明できる.
2.2.2
Chapman-Kolmogorov 方程式
確率過程における確率の保存は
∫
p(⃗x1 , t1 |⃗x3 , t3 ) =
d⃗x2 p(⃗x1 , t1 |⃗x2 , t2 ; ⃗x3 , t3 )p(⃗x2 , t2 |⃗x3 , t3 )
(2.6)
と表現できる.
特に Markov 過程では、次の Chapman-Kolmogorov 方程式が成立する
∫
p(⃗x1 , t1 |⃗x3 , t3 ) = d⃗x2 p(⃗x1 , t1 |⃗x2 , t2 )p(⃗x2 , t2 |⃗x3 , t3 ).
(2.7)
この式は Markov 過程の時間発展を記述する非局所的な基礎方程式である.時間発展を記述する局
所的な基礎方程式は後述の微分形の Chapman-Kolmogorov 方程式で説明する.
2.2.3
経路の連続性
任意の ϵ > 0 について
1
∆t→+0 ∆t
∫
lim
d⃗xp(⃗x, t + ∆t|⃗z, t) = 0
|x−z|>ϵ
が成立するとき、「確率過程の経路は連続である」という。(Lindeberg 条件とも言う。)
11
(2.8)
図 2.2: 経路の連続性
これは直観的に言うと次の様になる.例として自由ブラウン運動を考えよう.1サンプルとして
の経路を考えると,
「経路が連続である」とは,図 2.2 の実線のように全ての場所で飛びがない過程
ことを指す.逆に図 2.2 の破線の様に飛びを含むと,
「経路が連続でない」と言う.
具体例を扱う.次の様な Gauss 分布型の遷移確率に従う過程を考えよう
p(x, t + ∆t|z, t) = √
1
2πσ 2 ∆t
(x−z)2
e− 2σ2 ∆t .
(2.9)
この場合,(2.8) の積分左辺の積分を実行すれば容易にわかる通り,経路の連続性は充たされる.
次に Cauchy 分布型の遷移確率に従う仮定を考える
p(x, t + ∆t|z, t) =
∆t
.
π[(x − z)2 + ∆t2 ]
(2.10)
この場合,経路の連続性は充たされない.
2.2.4
微分形の Chapman-Kolmogorov 方程式
以下の (i)(ii)(iii) の様な関数 W (⃗
x|⃗z, t), Ai (⃗z, t), Bij (⃗z, t) が存在する Markov 過程を考える:
任意のϵ > 0 に対して,
(i)
|⃗x − ⃗z| < ϵとした時,
⃗x, ⃗z, t について一様に成立する
p(⃗x, t + ∆t|⃗z, t)
= W (⃗x|⃗z, t),
∆t
∫
1
(ii)
lim
d⃗x(xi − zi )p(⃗x, t + ∆t|⃗z, t) = Ai (⃗z, t) + O(ϵ),
∆t→+0 ∆t |⃗
x−⃗
z |<ϵ
∫
1
d⃗x(xi − zi )(xj − zj )p(⃗x, t + ∆t|⃗z, t) = Bij (⃗z, t) + O(ϵ).
(iii)
lim
∆t→+0 ∆t |⃗
x−⃗
z |<ϵ
lim
∆t→+0
(2.11)
(2.12)
(2.13)
この時、次の Chapman-Kolmogorov 方程式が成立する
∑ ∂
∂p(⃗z, t|⃗y , t′ )
1 ∑ ∂2
=−
[Ai (⃗z, t)p(⃗z, t|⃗y , t′ )] +
[Bij (⃗z, t)p(⃗z, t|⃗y , t′ )]
∂t
∂z
2
∂z
∂z
i
i
j
i
i,j
∫ ′
+
d⃗x[W (⃗z|⃗x, t)p(⃗x, t|⃗y , t′ ) − W (⃗x|⃗z, t)p(⃗z, t|⃗y , t′ )],
12
(2.14)
但し,
∫
′
∫
d⃗xF (⃗x, ⃗z) ≡ lim
ϵ→0
d⃗xF (⃗x, ⃗z)
(2.15)
|⃗
x−⃗
z |>ϵ
で定義する.この式は Markov 過程の時間発展を記述する局所的な基礎方程式である.証明は以下
のようにして行われる.
【Step 1】高次のモーメントの消失
課した条件 (i)(ii)(iii) は 0,1,2 次の遷移量の期待値に課す条件である.さて、実は高次の項は全
て消えることを示すことが出来る.以下,3 次の係数を議論する.3 次の係数を次の式で定義する
∫
1
lim
d⃗x(xi − zi )(xj − zj )(xk − zk )p(⃗x, t + ∆t|⃗z, t) = Cijk (⃗z, t) + O(ϵ). (2.16)
∆t→+0 ∆t |⃗
x−⃗
z |<ϵ
次に、
C̄(⃗
α, ⃗z, t) ≡
∑
αi αj αk Cijk (⃗z, t)
(2.17)
ijk
を定義する.ここで
Cijk (⃗z, t) =
1
∂3
C̄(⃗
α, ⃗z, t)
3! ∂αi ∂αj ∂αk
(2.18)
が成立する.この C̄ を絶対値評価する
∫
1
|C̄(⃗
α, ⃗z, t)| ≤ lim
|⃗
α · (⃗x − ⃗z)|[⃗
α · (⃗x − ⃗z)]2 p(⃗x, t + ∆t|⃗z, t)d⃗x + O(ϵ)
∆t→+0 ∆t |⃗
x−⃗
z |<ϵ
∫
≤ |⃗
α|ϵ lim
[⃗
α · (⃗x − ⃗z)]2 p(⃗x, t + ∆t|⃗z, t)d⃗x + O(ϵ)
∆t→+0
|⃗
x−⃗
z |<ϵ
= ϵ|⃗
α|[αi αj Bij + O(ϵ)] + O(ϵ)
= O(ϵ).
即ち,3 次の係数は消失する.高次の係数についても同様の議論が出来る.よって,3 次以上の係
数は消失する.
13
【Step 2】任意の関数 f (⃗
z ) の期待値と Taylor 展開
まず、2 回微分可能な任意の関数 f (⃗
z ) を用意する。この関数について次の積分を考え,変形する
∫
∂
d⃗xf (⃗x)p(⃗x, t|⃗y , t′ )
∂t
∫
∫
∫
1
′
= lim
{ d⃗x d⃗zf (⃗x)p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t ) − d⃗zf (⃗z)p(⃗z, t|⃗y , t′ )}
∆t→+0 ∆t
∫
2
∑
∑
∂f
1
∂
f
1
d⃗xd⃗z (xi − zi )
{
+
= lim
(xi − zi )(xj − zj )
∆t→+0 ∆t
∂zi
2
∂zi ∂zj
|⃗
x−⃗
z |<ϵ
i
i,j
× p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t′ )
∫
+
|⃗
x−⃗
z |<ϵ
∫
d⃗xd⃗z|⃗x − ⃗z|2 R(⃗x, ⃗z)p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t′ )
d⃗xd⃗zf (⃗x)p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t′ )
+
|⃗
x−⃗
z |≥ϵ
∫
d⃗xd⃗zf (⃗z)p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t′ )
+
|⃗
x−⃗
z |<ϵ
∫
−
d⃗xd⃗zf (⃗z)p(⃗x, t + ∆t|⃗z, t)p(⃗z, t|⃗y , t′ )}.
(2.19)
ここで,R(⃗
x, ⃗z) は Taylor 展開の余剰項であり,
f (⃗x) = f (⃗z) +
∑ ∂f (⃗z)
∂zi
i
(xi − zi ) +
1 ∑ ∂ 2 f (⃗z)
(xi − zi )(xj − zj ) + |⃗x − ⃗z|2 R(⃗x, ⃗z)
2 i,j ∂zi ∂zj
を充たす.また,ϵ → 0 の極限で |R(⃗
x, ⃗z)| → 0 である.式 (2.19) の 3 行目から 4 行目の項は条
件 (ii) (iii) を用いて次の様に変形できる
∫
2
∑
∑
∂f
∂
f
1
p(⃗z, t|⃗y , t′ ) + O(ϵ).
d⃗z
Ai (⃗z)
Bij (⃗z)
+
∂zi
2
∂zi ∂zj
i
(2.20)
i,j
式 (2.19) の 5 行目の項は以下のように ϵ → +0 で消える
[
]
∫
1
2
|(2.19) の 5 行目の項 | ≤
d⃗x|⃗x − ⃗z| p(⃗x, t + ∆t|⃗z, t) max |R(⃗x, ⃗z)|
∆t |⃗x−⃗z|<ϵ
|⃗
x−⃗
z |<ϵ
[
]{
}
∑
→
Bii (⃗z, t) + O(ϵ)
max |R(⃗x, ⃗z)| .
(2.21)
|⃗
x−⃗
z |<ϵ
i
式 (2.19) の 6 行目から 8 行目の項は次の様になる
∫
∫
d⃗xd⃗zf (⃗z)[W (⃗z|⃗x, t)p(⃗x, t|⃗y , t′ ) − W (⃗x|⃗z, t)p(⃗z, t|⃗y , t′ )].
(2.22)
|⃗
x−⃗
z |<ϵ
これらを用いて,
∂
∂t
∫
d⃗zf (⃗z)p(⃗z, t|⃗y , t′ )
∫
2
∑
∑
∂f
(⃗
z
)
1
∂
f
(⃗
z
)
p(⃗z, t|⃗y , t′ )
= d⃗z
Ai (⃗z, t)
+
Bi,j (⃗z, t)
∂z
2
∂z
∂z
i
i
j
i
i,j
{∫ ′
}
∫
+ d⃗zf (⃗z)
d⃗x[W (⃗z|⃗x, t)p(⃗x, t|⃗y , t′ ) − W (⃗x|⃗z, t)p(⃗z, t|⃗y , t′ )]
14
(2.23)
となる.
【Step 3】分布関数の時間発展方程式
この式 (2.23) を部分積分の公式を用いて変形すると,微分形の Chapman-Kolmogorov 方程式
(2.14) が導出される.
式の解釈
Chapman-Kolmogorov 方程式の各項の説明を行う.まず Ai (⃗z, t) についてである.Ai (⃗z, t) は時
刻 t に位置 ⃗
z にいる粒子が受ける平均的な力を表す.Bij (⃗z, t) は時刻 t に位置 ⃗z にいる粒子の拡散
∫′
を表現する.この二つの項は局所的な確率の流れを表している. を含む項は,非局所的な確率
∫′
の流れを表す.事実, の項が消える条件は ⃗
x ̸= ⃗z で W (⃗z|⃗x, t) = 0 が成立することであり,これ
は経路の連続性の条件と同じである.連続経路の確率過程ではこの項は消え,確率の流れは局所的
になる.
15
2.3
白色ノイズ (Gauss 過程)
では,次に Gauss ノイズを扱おう.ここでも Gardiner の論法 [20] を踏襲して議論を行う.
2.3.1
Wiener 過程
ˆ を
白色 Gauss ノイズを数学的に表現した Wiener 過程を定義する.まず白色 Gauss ノイズξ(t)
次の確率分布汎関数に従う確率変数として定義する
[ ∫
Pξ̂(t) [η(t)] ∝ exp −
t
ds
0
]
(η(s))2
,
2σ 2
(2.24)
但し,σ 2 は白色 Gauss ノイズの分散である.ここで「白色」とは,ノイズが過去との時間相関を
持たないことを意味する.白色ノイズの統計的性質は次の様になる
ˆ
ˆ ξ(s)⟩
ˆ
⟨ξ(t)⟩
= 0, ⟨ξ(t)
= σ 2 δ(t − s).
(2.25)
この節では,σ 2 = 1 の白色 Gauss ノイズのみを扱う.
次に Wiener 過程Ŵ (t) 1 を次の式によって定義する2
∫
t
ˆ
dsξ(s).
Ŵ (t) =
(2.26)
0
Wiener 過程は形式的に
ˆ
dŴ (t) = ξ(t)dt
(2.27)
とも書かれる.
Wiener 過程の Chapman-Kolmogorov 方程式
Wiener 過程の遷移率は
p(W + ∆W, t + ∆t|W, t) = √
(∆W )2
1
e− 2∆t
2π∆t
(2.28)
で与えられる.よって Chapman-Kolmogorov 方程式は拡散方程式
1 ∂ 2 p(W, t)
∂p(W, t)
=
∂t
2 ∂W 2
(2.29)
となる.
唯一の連続経路のノイズ
連続経路の確率過程では ⃗
x ̸= ⃗z で W (⃗z|⃗x, t) = 0 が成立するのは前述した.今,連続経路なノイズを
1次元でモデル化しよう.ノイズが時間的,空間的に一様であるとすると,A(z, t) = A, B(z, t) = B
1 標準
Brown 運動と呼ぶこともある.
Wiener 過程を定義し,その超関数的な意味での微分として白色 Gauss ノイズを定義する.ここでの論法
は物理学者の直観に合うように再構成された,数学的には厳密でない論法である.
2 数学的には
16
が成り立つ.また,ノイズの平均値が 0 だとすると,A = 0 である.よって,一次元での Chapman-
Kolmogorov 方程式は拡散方程式
∂p(z, t)
B ∂ 2 p(z, t)
=
(2.30)
∂t
2 ∂z 2
となる.これは Wiener 過程を定数倍した過程である.即ち,時空間的に一様な連続経路の全ての
ノイズは,Wiener 過程のみを使って構成できることがわかる.
Wiener 過程の微分形式
Wiener 過程の微分形式には著しい特徴がある.それは次の様な特徴である:
(dŴ )2 = dt + o(dt), dŴ dt = o(dt), (dŴ )n = o(dt)
(for n ≥ 3).
(2.31)
この性質の著しいところは,平均値を取らない状態で成立するというところである.後述の Lévy
過程ではこの性質は成立しない.この等式は Mean-Square 極限の意味3 で成立する.Mean-Squre
極限 (ms) とは
(ms) lim f∆t = f ⇐⇒ lim ⟨(f∆t − f )2 ⟩ = 0
∆t→+0
∆t→+0
(2.32)
で定義される.即ち,上の微分形式の意味は
(dŴ )2 = dt + o(dt) ⇐⇒ ⟨(∆Ŵ )2 − ∆t)2 ⟩ = o(∆t),
dŴ dt = o(dt) ⇐⇒ ⟨(∆Ŵ ∆t − 0) ⟩ = o(∆t),
2
(dŴ )n = o(dt) ⇐⇒ ⟨(∆Ŵ )n − 0)2 ⟩ = o(∆t)
(2.33)
(2.34)
(2.35)
である.但し,n ≥ 3 である.
2.3.2
Wiener 過程での微積分
α-積分
では次に,Wiener 過程に対する微積分を定義する.まずは素朴に積分を定義しよう.区間 [0, t]
を N 分割し,t1 (= 0), . . . , ti . . . , tN (= t) とする.任意の連続関数 f (s, W ) に対して,次の様な積
分を考えよう
∫
t
dŴ (s)f (s, Ŵ (s)) ≡ lim
N →∞
0
N
−1
∑
∆Ŵ (ti )f (ti , Ŵ (τi )),
(2.36)
i=1
但し,0 ≤ α ≤ 1 としたとき τi = (1 − α)ti + αti+1 であり,∆Ŵ (ti ) ≡ Ŵ (ti+1 ) − Ŵ (ti ) である.
この積分を本論文では α-積分と呼ぶことにしよう4 .もし Wiener 過程 Ŵ (t) が特異性を持たない
ˆ = dŴ (t)/dt は任意の時刻
通常の関数なら,この積分は α によらずに定義される5 .しかし,ξ(t)
において不連続であるように,Wiener 過程は特異的な挙動をする関数である.この為,積分の結
果が α の値に依存する.事実,f (s, W ) = W の場合の期待値は次の様になり,α に陽に依存する6
⟨∫ t
⟩
Ŵ (s)dŴ (s) = αt.
(2.37)
0
3 確率過程での「極限の収束」の定義はいくつかある.例えば「分布に置ける収束」,
「Mean-Square
収束」,
「確率収束」
等が有名である.しかし,数学的には全て違う定義を指す.
4 この積分の名前は文献によって名前が違うので,ここでは仮にこう呼ぶことにする.
5 有界変動な関数に対しては Riemann-Stieltjes 積分は収束する [25].
6 f (t, W ) の t についての離散化については注目する必要はない.何故なら t については陽に不連続な変動をしない為,
離散化の仕方に寄らないからだ [20].即ち,Ŵ (t) を通しての変動だけについて気を払えば良い.
17
伊藤積分
次に,最も簡単な積分の定義である α = 0 の場合を考えよう.即ち,任意の連続関数 f (s, W ) に
対しての次の積分を定義する
∫
N
−1
∑
t
dŴ (s) · f (s, Ŵ (s)) ≡ lim
N →∞
0
∆Ŵ (ti )f (ti , Ŵ (ti )).
(2.38)
i=1
これを伊藤積分という.記号 · は積分が伊藤積分の意味で定義されることを意味する.この積分は
Mean-Square 極限の意味で一意に定義される[26].
伊藤積分には次の様な性質がある:
∫ t
∫ t
2
(dŴ (s)) · f (s, Ŵ (s)) =
dsf (s, Ŵ (s)),
0
0
∫ t
(dŴ (s))n · f (s, Ŵ (s)) = 0,
(2.39)
(2.40)
0
但し,(2.40) での n は n ≥ 3 であり,また,これらの等式も Mean-Square 極限の意味で成立する.
これらの式は Wiener 過程の微分形式 (2.31) と完全に整合的である.
次に,Wiener 過程の微分形式を用いて,伊藤積分での微分規則を導出しよう.今,f (t, W ) を
W について 2 回微分可能,t について 1 回微分可能な関数とする.Taylor の定理によれば,
∆f (t, Ŵ ) ≡f (Ŵ + dŴ , t + dt) − f (Ŵ , t)
=
∂f
∂f
∂2f
dt +
· dŴ +
· (dŴ )2
∂t
∂W
∂dW 2
∂2f
+
· dŴ dt + o(dt) + o(dŴ 2 )
∂t∂W
が成立する.ここで,Wiener 過程の微分形式 (2.31) を用いると,
(
)
∂f
∂2f
∂f
df (t, Ŵ ) =
+
dt +
· dŴ + o(dt)
∂t
∂W 2
∂W
(2.41)
(2.42)
が成立する.この公式を伊藤の公式という.見てわかる通り,通常の微分規則と大きく違うことが
分かる.
伊藤積分は以下の著しい性質を持つ
⟨∫ t
⟩ ∫
dŴ (s) · f (s, Ŵ (s)) =
0
t
⟨
⟩ ⟨
⟩
dŴ (s) · f (s, Ŵ (s)) = 0.
(2.43)
0
この性質を Nonanticipation という.
Stratonovich 積分
次に,α-積分で α = 1/2 の場合,即ち中点規則で積分を定義する場合を考えよう.即ち
(
)
∫ t
N
−1
∑
Ŵ (ti ) + Ŵ (ti+1 )
dŴ (s) ◦ f (s, Ŵ (s)) ≡ lim
∆Ŵ (ti )f ti ,
(2.44)
N →∞
2
0
i=1
である.但し,f (t, W ) は任意の連続関数とする.この積分を Stratonovich 積分と言う.記号 ◦
は,積分が Stratonovich 積分の意味で定義されていることを意味している.
18
Stratonovich 積分から伊藤積分への変換公式を導出しよう.導出には Wiener 過程の微分形
式 (2.31) を使えば良い.今 f (t, W ) が W について 1 回微分可能だとすると Taylor の定理により,
(
)
(
)
Ŵ (ti ) + Ŵ (ti+1 )
∂f ∆Ŵ (ti )
f ti ,
= f (ti , Ŵ (ti )) +
·
+ o (∆Ŵ (ti ))2 .
(2.45)
2
∂W
2
である.但し,∆Ŵ (ti ) = Ŵ (ti+1 ) − Ŵ (ti ) である.この式を (2.44) に代入し,微分形式 (2.31)
を用いると,
∫
∫
t
t
dŴ (s) ◦ f (s, Ŵ (s)) =
0
dŴ (s) · f (s, Ŵ (s)) +
0
1
2
∫
t
ds
0
∂f
∂W
(2.46)
が成り立つ.
ところで Stratonovich 積分には著しい特徴がある.微分規則を調べると,
df (t, Ŵ ) =
∂f
∂f
dt +
◦ dŴ
∂t
∂W
(2.47)
となる.即ち,Stratonovich 積分のもとでは通常の計算規則が使えることが分かる.但し,伊藤
積分が持っていた性質 (2.43) は失われる.この為,数学的には伊藤積分のほうが性質が良いと言
われている [20].但し,物理学者の直観とあう計算規則を持つ点に加え,後の節 2.5.7 で触れる
が,有限時間相関を持つノイズの理想化としては Stratonovich 積分が良いということ知られてお
り [27],物理学では Stratonovich 積分が用いられる事が多い.
2.3.3
伊藤型確率微分方程式
この節では確率微分方程式を定義する.今,任意の関数 a(t, x), b(t, x) を導入する.次の様な量
を考える
X̂∆t (ti+1 ) ≡
i [
∑
]
∆ta(tk , X̂∆t (tk )) + ∆Ŵ (tk )b(tk , X̂∆t (tk )) ,
(2.48)
k=0
但し,ti = i∆t である.これを用いて
X̂(t) ≡ lim X̂∆t (t)
∆t→0
(2.49)
を定義する.この式を形式的に
∫
∫
t
t
dŴ (s) · b(s, X̂(s))
dsa(s, X̂(s)) +
X̂(t) =
(2.50)
0
0
と書く.式 (2.50) を伊藤型確率積分方程式という.この確率積分方程式を形式的に微分すると
dX̂
ˆ
= a(t, X̂(t)) + b(t, X̂(t)) · ξ(t)
dt
(2.51)
を得る.この式 (2.51) を伊藤型確率微分方程式という.ポイントとなるのは,確率微分方程式 (2.51)
とは確率積分方程式 (2.50) の形式表現であり,確率積分方程式によって定義されると,いうこと
である.
19
伊藤の公式
伊藤型確率微分方程式 (2.51) に従う変数の微分計算規則は伊藤の公式といわれる.伊藤の公式
は,2 回微分可能な任意の関数 f (x) について,次の様に表される
df [X̂(t)]
[
]
]2
1[
= dta(t, X̂(t)) + dŴ (t) · b(t, X̂(t)) f ′ [X̂(t)] + dt b(t, X̂(t)) f ′′ [X̂(t)].
2
(2.52)
証明は Wiener 過程の微分形式 (2.31) と Taylor 展開を用いる.
Fokker-Planck 方程式 (伊藤型)
伊藤の公式は任意の 2 回微分可能な関数 f (x) について成立する.これを用いると分布関数の時
間発展方程式である Fokker-Planck 方程式が得られる.導出は以下のように行う.伊藤の公式の
両辺のアンサンブル平均をとると次式
⟨
⟩
⟩
⟨
⟩ ⟨[
]2
df [X̂(t)]
′
′′
= a(t, X̂(t))f [X̂(t)] + b(t, X̂(t)) f [X̂(t)]
dt
を得る.この式を積分系に直すと
∫
∫
[
]
d
dxp(x, t)f (x) = dxp(x, t) a(t, x)f ′ (x) + (b(t, x))2 f ′′ (x)
dt
(2.53)
(2.54)
である.部分積分を用い,f (x) が 2 回微分可能な任意の関数であることを用いると Fokker-Planck
方程式
[
]
∂
∂2
∂
2
p(x, t) = − a(t, x) +
(b(t,
x))
p(x, t)
∂t
∂x
∂x2
(2.55)
を得る.この式は Markov 過程の基礎方程式 Chapman-Komlogorov 方程式 (2.14) からも導出でき
る.この場合は係数 A(x, t), B(x, t) を確率微分方程式 (2.51) から計算する.この際,確率微分方
程式 (2.51) が伊藤型で定義されている為,dŴ と X̂(t) の期待値が分離すること (2.43) を考慮する
必要がある.
2.3.4
Stratonovich 型確率微分方程式
この節では Stratonovich 型の確率微分方程式を定義する.今,任意の関数 a(t, x), b(t, x) を導入
する.次の様な量を考える
[
(
)]
i
∑
X̂∆t (tk ) + X̂∆t (tk+1 )
X̂∆t (ti+1 ) ≡
∆ta(tk , X̂∆t (tk )) + ∆Ŵ (tk )b tk ,
,
2
(2.56)
k=0
但し,ti = i∆t である.これを用いて
X̂(t) ≡ lim X̂∆t (t)
∆t→0
(2.57)
を定義する.この式を形式的に
∫
X̂(t) =
∫
t
0
0
20
t
dŴ (s) ◦ b(s, X̂(s))
dsa(s, X̂(s)) +
(2.58)
と書き,Stratonovich 型確率積分方程式と呼ぶ.この Stratonovich 型確率積分方程式を形式的
に微分して
dX̂
ˆ
= a(t, X̂(t)) + b(t, X̂(t)) ◦ ξ(t)
dt
と書く.これを Stratonovich 型確率微分方程式という.
(2.59)
伊藤型への変換
Stratonovich 型の確率微分方程式は,伊藤型の確率微分方程式に変換できる.変換公式の導出に
は,確率積分方程式 (2.58) に戻って考える.Wiener 過程の微分形式 (2.31) と Taylor 展開を用い
ると
∫
t
dŴ (s) ◦ b(s, X̂(s))
(
)
n−1
∑
X̂(ti ) + X̂(ti+1 )
= lim
∆Ŵ (ti )b ti ,
n→∞
2
i=1
[
]
n−1
∑
∆X̂(ti ) ∂
= lim
∆Ŵ (ti ) b(ti , X̂(ti )) +
b(ti , X̂(ti )) + o(∆X̂(ti ))
n→∞
2
∂x
i=1
[
]
n−1
∑
∆Ŵ (ti )b(X̂(ti )) ∂
= lim
∆Ŵ (ti ) b(ti , X̂(ti )) +
b(ti , X̂(ti )) + o(∆t)
n→∞
2
∂x
i=1
∫ t
∫ t
∂
1
=
dŴ (s) · b(s, X̂(s)) +
ds b(s, X̂(s)) b(s, X̂(s))
2
∂x
0
0
0
(2.60)
となる.但し,∆X̂(ti ) ≡ X̂(ti+1 ) − X̂(ti ) である.よって,Stratonovich 型確率積分方程式 (2.58)
を伊藤型確率微分方程式に変換する公式は
∫ t
∫ t
X̂(t) =
dsa(s, X̂(s)) +
dŴ (s) ◦ b(s, X̂(s))
0
0
⇐⇒
] ∫ t
∫ t [
1
∂
X̂(t) =
ds a(s, X̂(s)) + b(s, X̂(s)) b(s, X̂(s)) +
dŴ (s) · b(s, X̂(s))
2
∂x
0
0
(2.61)
である.同様に,Stratonovich 型確率微分方程式 (2.58) を伊藤型の確率微分方程式に変換する公
式は
dX̂
ˆ
= a(t, X̂(t)) + b(t, X̂(t)) ◦ ξ(t)
dt
⇐⇒
dX̂
1
∂
ˆ
= a(t, X̂(t)) + b(t, X̂(t)) b(t, X̂(t)) + b(t, X̂(t)) · ξ(t)
dt
2
∂x
である.
21
(2.62)
通常の計算規則
Stratonovich 型の確率微分方程式の著しい特色は,微分計算規則にある.Stratonovich 型の確率
微分方程式 (2.59) に従う時,2 回微分可能な任意の関数に対して
df [X̂(t)] = f ′ (X̂(t)) ◦ dX̂(t)
[
]
= f ′ (X̂(t)) a(t, X̂(t))dt + b(t, X̂(t)) ◦ dŴ (t)
(2.63)
が成立する.証明は,Stratonovich 型微分方程式を伊藤型に変換し,伊藤の公式 (2.52) を用いる.
この公式は Stratonovich 型に微分方程式を定義すれば,形式的に通常の計算規則が成立すると
いう事を示している.
Fokker-Planck 方程式 (Stratonovich 型)
Stratonovich 型微分方程式に対しても,分布関数の時間発展方程式である Fokker-Planck 方程
式を導出できる,導出は Stratonovich 型の微分方程式を伊藤型微分方程式に変換し,伊藤型の
Fokker-Planck 方程式の公式に代入すればよい.結果,次式を得る
[
]
∂
∂
∂
∂
p(x, t) = − a(t, x) +
b(t, x) b(t, x) p(x, t).
∂t
∂x
∂x
∂x
(2.64)
確率的 Liouville 方程式
Fokker-Planck 方程式を導出する別の方法に,確率的 Liouville 方程式を経由する方法がある
[28, 29, 30, 31].この方法は物理学者にとって直観的であり,また後に説明する有色ノイズの取り扱
いに直ちに拡張できる点が優れているため,よく用いられる.先ず,確率的な確率分布関数
⟨
⟩ P̂(x, t) =
δ(x − X̂(t)) を定義する.これは確率的な関数 (Stochastic Function) であり, P̂(x, t) = p(x, t)
という著しい性質を持つ.ところで,Stratonovich 型では通常の計算規則 (2.63) が成立すること
は前述の通りである.よって Stratonovich の意味で,デルタ関数が充たすべき偏微分方程式であ
る連続の式がこの確率的な分布関数に対しても成立する.即ち,
]
∂
∂ [˙
P̂(x, t) = −
X̂(t) ◦ P̂(x, t)
∂t
∂x
(2.65)
が成立する.この確率偏微分方程式 (stochastic partial differential equation) を確率的 Li-
ouville 方程式という.確率的 Liouville 方程式を伊藤型に変形を行うと
[
]
∂
1
∂
∂
∂
ˆ · P̂(x, t)
P̂(x, t) = −
a(t, x) − b(t, x) b(t, x) P̂(x, t) −
b(t, x)ξ(t)
∂t
∂x
2
∂x
∂x
(2.66)
となる.両辺の期待値を取ると,Stratonovich 型に対する Fokker-Planck 方程式 (2.64) を得る.
22
Stratonovich 積分の多義性
Gauss ノイズに駆動される過程に限って言えば,Stratonovich 積分の定義には多義性があること
が知られている [30, 31].例えば,
∫
t
dsŴ (s) ◦ b(s, X̂(s))
(
)
n−1
∑
X̂(ti ) + X̂(ti+1 )
= lim
∆Ŵ (ti )b ti ,
n→∞
2
i=1
0
= lim
n→∞
n−1
∑
∆Ŵ (ti )
i=1
b(ti , X̂(ti )) + b(ti , X̂(ti+1 ))
2
(2.67)
がそうである.次の2条件を充たす任意の関数 fsym (x, y) を考える:
• 条件 (i) fsym (x, y) = fsym (y, x),
• 条件 (ii) fsym (x, x) = f (x) となる.
この2条件を充たす fsym (x, y) に対して,
∫
t
dŴ (s) ◦ f (X̂(s)) = lim
0
n→∞
n−1
∑
∆Ŵ (ti )fsym (X̂(ti ), X̂(ti+1 ))
(2.68)
i=1
を示すことが出来る [30, 31].証明は Taylor 展開と Wiener 過程の微分形式 (2.31) を用いれば容
易に行える.
23
白色ノイズ (非 Gauss 過程)
2.4
次に,白色な非 Gauss ノイズに駆動される系を議論する.数学的には,白色ノイズは後述の Lévy
過程と同義である.まず,最初に Lévy 過程を発見論的に定義する.次に,非 Gauss ノイズの最も
典型的なノイズである Poisson ノイズを扱う.Poisson ノイズが非 Gauss ノイズの典型例である
ことを数学的に表現した伊藤-Lévy 分解を証明する.最後に,Lévy 過程に駆動される系の伊藤型
確率微分方程式と,その系の確率分布の時間発展を記述する一般化 Fokker-Planck 方程式を議論
する.
2.4.1
Lévy 過程
まず Lévy 過程を発見論的に定義する [20].その為には Chapman-Kolmogorov 方程式 (2.14) に
ˆ と書くものとする.時間的に定常なノイズとすし,空間的にも
立ち返る.ノイズを形式的に ξ(t)
一様とする.今,
∫
t
ˆ
dsξ(s)
L̂(t) ≡
(2.69)
0
とする.L̂(t) に関する Chapman-Kolmogorov 方程式を立てる.時間的に定常で,空間的に一様な
ので,A(x, t) = 0, B(x, t) = σ 2 , W (L|L′ , t) = w(L − L′ ) と置け,
σ2 ∂ 2
∂p(L, t)
=
p(L, t) +
∂t
2 ∂L2
∫
′
duW (u) [p(L − u, t) − p(L, t)]
(2.70)
が L̂(t) についての Chapman-Kolmogorov 方程式である.この L̂(t) (2.69) を Lévy 過程と言い,一
般の白色ノイズの数学的表現として看做す.Lévy 過程の特性関数には標準系がある.Lévy 過程の
∫∞
Chapman-Kolmogorov 方程式 (2.70) を用いて特性関数 ϕ(s, t) = −∞ dLeiLs p(L, t) を求めると,
[{
} ]
∫ ′
1 2 2
isu
ϕ(s, t) = exp ias − σ s +
du(e − 1)w(u) t
2
(2.71)
を得る.Lévy 過程は無限分解可能である.無限分解可能であるとは,ある関数 Φ(s) を用いて,次
の様に書けることを言う
t
ϕ(s, t) = Φ(s) .
(2.72)
数学での Lévy 過程の定義
数学的な Lévy 過程の定義はもう少し厳密で以下のようになる [32, 26].
以下の性質を満たす連続時間確率過程 {L̂(t), 0 ≤ t ≤ T } を Lévy 過程と言う:
• (1) (独立増分) 任意の有限この時点 0 ≤ t0 < t1 < · · · < tn ≤ T に対し,L̂(t1 )−L̂(t0 ), . . . , L̂(tn )−
L̂(tn−1 ) が独立である.
• (2) (時間的一様性) L̂(t + s) − L̂(t) は t に寄らない.
• (3) ほとんど確実に L̂(0) = 0 である.
24
• (4) 確率連続である.即ち,次の式が成立する.任意の 0 ≤ t ≤ T, ϵ > 0 に対し,
lim P (|L̂(s) − L̂(t)| > ϵ) = 0
(2.73)
s→t
を充たす.
• (5) 1つのトラジェクトリーはほとんど確実に右連続左極限を持つ.
この定義のもと,Lévy 過程が無限分解可能であることが証明され,Lévy 過程の標準系は導出され
る.即ち,この節の定義は,Lévy 過程の標準系を発見論的に見つけ,そこから逆算して諸々の性
質を証明している.
2.4.2
Poisson 過程
前述の Gauss 過程は,a = 0, W (u) = 0 の場合を指す.では逆に次の様な単純化を行おう
a = 0, σ = 0, w(u) = λδ(u − I).
(2.74)
この形の Lévy 過程を,強度 I, 遷移率 λ の Poisson 過程 N̂I;λ (t) という.Poisson 過程の特性関
数は
(
)
ϕ(s, t) = exp λt[eis − 1]
(2.75)
である.Poisson 過程を微分すると Poisson ノイズが得られる.Poisson ノイズは
η̂I;λ (t) ≡
dN̂I;λ (t) ∑
Iδ(t − t̂i;λ )
=
dt
i
(2.76)
の様にデルタ関数で記述できる過程である.但し,{t̂i;λ }i は Poisson 配置であり,出現間隔は遷
移率 λ に従う.
2.4.3
伊藤-Lévy 分解
Lévy 過程は
∫
L̂(t) = a + σ Ŵ (t) +
dI N̂I;λ(I) (t)
(2.77)
の様に Gauss 過程と複数の Poisson 過程に分けることが出来る.但し,Ŵ (t) は Wiener 過程,
N̂I;λ(I) (t) は強度 I, 遷移率 λ(I) の Poisson 過程とする.これを伊藤-Lévy 分解という.
簡単な場合について証明する.今,遷移関数 w(u) が可算個のデルタ関数で書ける場合を考える.
即ち,
w(u) =
∑
λi δ(u − Ii )
(2.78)
i
とする.Lévy 過程の特性関数の標準系より,
[(
ϕ(s, t) = exp
ias − σ 2 s2 +
∑
) ]
λi (eisIi − 1) t
(2.79)
N̂Ii ;λi (t)
(2.80)
i
である.ところで
L̂(t) = a + σ Ŵ (t) +
∑
i
の特性関数も (2.79) で書ける.よって,この場合について Lévy 過程が (2.80) の形に分解できる
ことが証明できた.この場合を不加算個の場合に拡張すれば伊藤-Lévy 分解 (2.77) は証明される.
25
伊藤-Lévy 分解の意味
伊藤-Lévy 分解はノイズの形に大きな制限をかけている.では,次の様な確率分布汎関数に従う
ノイズ
[ ∫ t
]
{ξ(s)}4
P [ξ] ∝ exp −
ds
4
0
(2.81)
は,素朴には定義されないのだろうか?答えは定義されないである.これは次の様に証明できる.
ˆ
時間 dt の間のノイズ dL̂ = ξ(t)dt
の分散は任意の整数 n ≥ 2 に対して
⟨
⟩
(dL̂)n = o(dt)
(2.82)
となることが簡単に計算できる.Wiener 過程の微分形式 (2.31) と比較すればわかる通り,このノ
イズは特異性が弱すぎる.即ち,dt → 0 の極限でこのノイズは消失する.事実,伊藤-Lévy 分解
によればこの形のノイズは存在しない.
以上の事から次の様に伊藤-Lévy 分解を解釈できる.連続時間確率過程では,ノイズに対して
「dt → 0 でも消失しない」という条件が課される.この条件を満たすノイズは Gauss ノイズと
Poisson ノイズしかないということを伊藤-Lévy 分解は言っている.連続な経路を持つノイズは
Gauss ノイズしかないという事実を思い出そう.連続な経路を持つようにノイズは dt → 0 の極限
で Gauss ノイズに収束し,それ以外の不連続な経路の飛びを引き起こすノイズは全て Poisson ノ
イズに押しつけられるのだ.
2.4.4
伊藤型確率微分方程式と伊藤の公式
では次に非 Gauss ノイズに駆動される確率微分方程式を考える.Gauss 過程と同様に,確率積
分方程式の形式表現として確率微分方程式を定義する.ここでは伊藤型の確率積分方程式を
∫ t
∫ t
X̂(t) =
dsa(s, X̂(s)) +
dL̂(s) · b(s, X̂(s))
(2.83)
0
0
として定義する.この形式表現として伊藤型確率微分方程式を
dX̂(t) = a(t, X̂(t))dt + b(t, X̂(t)) · dL̂(t)
(2.84)
と書く.非 Gauss ノイズの特徴は,Wiener 過程の微分形式 (2.31) の様な便利な関係式が存在
しないことである.即ち,(dL̂)2 等は定数に変化せず,確率変数のままである.例えば,強度 2 の
Poisson ノイズの場合なら,Poisson ノイズが発生した瞬間に dL̂ = 2 であり,(dL̂)2 = 4 として計
算しなければならない7 .その為,非 Gauss ノイズに駆動される場合の伊藤の公式は Taylor 展開
の全次数を真面目に扱う必要があり,無限回微分可能な任意の関数 f (x) に対して
df [X̂] = f ′ [X̂](adt + b · dL̂) +
= f ′ [X̂]adt +
∞ n
∑
b
i=1
n!
1 ′′
1
f [X̂]b2 · (dL̂)2 + f ′′′ [X̂]b3 · (dL̂)3 + . . .
2!
3!
f (n) [X̂] · (dL̂)n
= f (X̂ + adt + b · dL̂) − f (X̂)
(2.85)
となる.
7 逆に言えば,何故 Gauss ノイズではそのような取り扱いが出来たかというと次の様な理由である.Gauss ノイズは微
小時間当たりに無限回ノイズが発生する為,微小時間当たりに平滑化されてしまう.結果,2 次以降の微小量はほとんど確
実に平均量に置きかわってしまったのだ.Poisson ノイズは微小時間当たりに高々1 回しか生じないので,このような取り
扱いは出来ない.
26
2.4.5
一般化 Fokker-Planck 方程式 (白色ノイズ)
伊藤の公式を用いると非 Gauss ノイズについての一般化 Fokker-Planck 方程式が得られる.導
出は Gauss ノイズの場合 (2.55) と同様で,結果
[
]
∞
∑
1 ∂n
∂
∂
n
p(x, t) = − a(t, x) +
(−b(t, x)) p(x, t)
∂t
∂x
n! ∂xn
i=1
を得る.
27
(2.86)
2.5
有色ノイズ
次に有色ノイズの理論を展開しよう.有色ノイズとは時間相関を持つノイズのことである.自然
界に現れるノイズは実際には時間相関を持っており,白色ノイズは時間分解能を粗視化することで
得られる一種の理想化だと信じられている.8
まず最初に,有色ノイズの最も簡単な例である Ornstein-Uhlenbeck 過程を紹介しよう.今,
ˆ = dŴ /dt を分散が 1 の白色 Gauss ノイズとする.初期値 η̂(0) = 0 のもとで,
ξ(t)
dη̂(t)
ˆ
= −γ η̂(t) + Dξ(t)
dt
(2.87)
という確率過程を考える.ここで,γ は減衰を特徴付ける定数,D はノイズの強度を特徴付ける定
数である.この η̂(t) は t, s ≫ 1/γ の時,次の性質を充たす:
⟨η̂(t)⟩ = 0,
⟨η̂(t)η̂(s)⟩ =
(2.88)
D −γ|t−s|
e
.
2γ
(2.89)
即ち,η̂(t) は相関時間が 1/γ である有色ノイズである.ここで,1/γ → +0 の極限を取ると
⟨η̂(t)η̂(s)⟩ → Dδ(t − s)
(2.90)
となり,白色ノイズになる.
この様な有色ノイズの特徴は,特異性が小さいことである.例えば Ornstein-Uhlenbeck 過程の場
合,一度白色ノイズを積分して有色ノイズを作るので,特異性が除去されている.事実,Ornstein-
Uhlenbeck 過程の例ではノイズ自体が連続である.一般に有色ノイズは特異性が小さく,その為微
積分の計算規則等は通常と変わらない.そのため,以下の定式化では通常の計算規則が使えること
を前提とした計算を行う.
2.5.1
n 点モーメント関数と n 点キュムラント関数
ここでは,有色ノイズを特徴付ける n 点モーメント関数と n 点キュムラント関数の説明を行う.
まず,特性汎関数 Φt [v] とキュムラント汎関数 Ψt [v] を定義する
⟨
Φt [v] ≡
[ ∫ t
]⟩
exp i
dsη̂(s)v(s) , Ψt [v] ≡ log Φ[v].
(2.91)
0
n 点モーメント関数 mn (t1 , . . . .tn ) と n 点キュムラント関数 Kn (t1 , . . . , tn ) は
δn
mn (t1 , . . . , tn ) ≡
Φt [v] ,
δ(iv(t1 )) . . . δ(iv(tn ))
v=0
n
δ
Kn (t1 , . . . , tn ) ≡
Ψt [v]
δ(iv(t1 )) . . . δ(iv(tn ))
(2.92)
(2.93)
v=0
8 「量子力学で観測が絡んだ際に現れるノイズは純粋に白色ノイズなのではないか?」と,いう議論もある.つまり,こ
の信条は完全に合意が取れているわけではない.
28
によって定義される.即ち,
∞ n ∫ t
∑
i
dt1 . . . dtn mn (t1 , . . . , tn )v(t1 ) . . . v(tn ),
n! 0
n=0
∞ n ∫ t
∑
i
dt1 . . . dtn Kn (t1 , . . . , tn )v(t1 ) . . . v(tn )
Ψt [v] =
n! 0
n=0
Φt [v] =
(2.94)
(2.95)
とも表現できる.また,n 点モーメント関数は次の様にも表現できる
mn (t1 , . . . , tn ) = ⟨η̂(t1 ) . . . η̂(tn )⟩ .
(2.96)
n 点キュムラント関数は n 点モーメント関数の組み合わせで表現できる [20].代表的な n 点キュム
ラント関数のモーメント関数による表現には次の様なものがある
K1 (t1 ) = m1 (t1 ),
(2.97)
K2 (t1 , t2 ) = m2 (t1 , t2 ) − m1 (t1 )m1 (t2 ),
(2.98)
K3 (t1 , t2 , t3 ) = m3 (t1 , t2 , t3 )
− m2 (t1 , t2 )m1 (t3 ) − m1 (t1 )m2 (t2 , t3 ) − m2 (t1 , t3 )m1 (t2 )
+ 2m1 (t1 )m1 (t2 )m1 (t3 ).
2.5.2
(2.99)
Hänggi の公式
先ず,有色ノイズで最も有用な公式の一つである,Hänggi の公式を取り扱う.この公式は Novikov
が有色 Gauss ノイズの場合で導出した [33] ものを,後に Hänggi が有色非 Gauss ノイズの場合に
ついて拡張して導出した [34].Hänggi の公式は有色ノイズに駆動される系の相関関数を計算する
場合に役立つ.公式の内容は次の様になる.η̂(t) を有色ノイズとし,g[η̂] を η̂ についての汎関数と
する.また,0 ≤ s ≤ t とする9 .この時,
< η̂(t)g[η̂] >=
⟨
⟩
∫
∞
∑
1 t
δ n g[η̂]
dt1 . . . dtn Kn+1 (t, t1 , . . . , tn )
n! 0
δ η̂(t1 ) . . . δ η̂(tn )
n=0
(2.100)
が成立する.ここで,Kn+1 (t, t1 , . . . , tn ) は η̂(t) の n 点キュムラント関数である.以下,省略記号
として Kn+1 (t, t1 , . . . , tn ) = Kn+1 (t, ⃗t′ ), dt1 . . . dtn = d⃗t′ と書く.
証明の前にこの定理の使い方を説明する.今,
dX̂(t)
= X̂(t) + X̂(t)η̂(t)
dt
(2.101)
⟨
⟩
という確率微分方程式を考えよう.無限回微分可能な任意の関数 f (t, x) に対して,相関関数 η̂(t)f (t, X̂(t))
を計算する.式 (2.101) の形式解は
]
[
∫ t
dsη̂(s)
X̂(t) = X(0) exp t +
(2.102)
0
9 Hänggi の原論文 [34] では s = t の場合を特別に扱っていた.しかし,本論文では s = t を特別扱いすることなく見
通し良く扱う方法論を用いており,原論文の導出法とは違う.
29
であり,X̂(t) は η̂ の汎関数である.よって,式 (2.100) に g[η̂] → f (t, X̂(t)) として
⟨
⟩
η̂(t)f (t, X̂(t))
⟨
⟩
∫
∞
n
∑
1 t ⃗′
δ
f
(t,
X̂(t))
=
dt Kn+1 (t, ⃗t′ )
n! 0
δ η̂(t1 ) . . . δ η̂(tn )
n=0
⟨
(
)⟩
∫
∞
n−1
∑
1 t ⃗′
δ
∂f
(t,
X̂(t))
′
=
dt Kn+1 (t, ⃗t )
X̂(t)
n! 0
δ η̂(t1 ) . . . δ η̂(tn−1 )
∂ X̂(t)
n=0
⟨{
}
⟩
n
∫
∞
∑
1 t ⃗′
∂
=
dt Kn+1 (s, ⃗t′ )
X̂(t)
f (t, X̂(t))
(2.103)
n!
∂ X̂(t)
0
n=0
[
]
∫t
である.ここで,δ X̂(t)/δ η̂(s) = X(0) exp t + 0 dsη̂(s) = X̂(t) を用いた.Hänggi の公式を用
⟨
⟩
いると,ノイズを含む相関関数 η̂(t)f (t, X̂(t)) を,X̂(t) のモーメントの和に分解することが出
来る.即ち,X̂(t) についてのモーメントが全て分かれば,η̂(t) を含む相関関数も表現できる.
次に証明を行う.汎関数に対する Taylor 展開より
< η̂(s)g[η] >
∫
∞
∑
δ n g[0]
1 t ⃗′
=
dt
< η̂(s)η̂(t1 ) . . . η̂(tn ) >
n! 0
δ η̂(t1 ) . . . δ η̂(tn )
n=0
∫ t
∞
∑
δ n g[0]
δ n+1 Φt [0]
1
⃗t′
=
d
in+1 n! 0
δ η̂(t1 ) . . . δ η̂(tn ) δv(s)δv(t1 ) . . . δv(tn )
n=0
[
(
)] ∫
∞
t
n
n
∑ 1
δ
g[0]
δ
δΨ
t
=
d⃗t′
Φt n+1 n!
i
δ
η̂(t
)
.
.
.
δ
η̂(t
)
δv(t
)
.
.
.
δv(t
)
δv(t)
1
n
1
n
0
n=0
(2.104)
v=0
を得る.以下,⃗t′1 = (t1 , . . . , tj ), ⃗t′2 = (tj+1 , . . . , tn ), ⃗t′3 = (tj+1 , . . . , tj+k ) と略記し,汎関数に関す
る Leibniz 規則を用いると
[
]
δn
δΨt [v] Φt [v]
δv(t1 ) . . . δv(tn )
δv(s) =
v=0
n
∑
in+1 n!
Kj+1 (s, ⃗t′1 )mn−j (⃗t′2 )
j!(n
−
j)!
j=0
(2.105)
である.よって,
< η̂(s)g[η] >
∫ t
δg[0]
1
d⃗t′1 d⃗t′2
Kj+1 (s, ⃗t′1 )mn−j (⃗t′2 )
=
j!(n
−
j!)
δ
η̂(t
)
.
.
.
δ
η̂(t
)
1
n
0
n=0 j=0
∫ t
∞ ∑
∞
∑
1
δg[0]
=
d⃗t′1 d⃗t′3
Kn+1 (s, ⃗t′1 ) ⟨η̂(tj+1 ), . . . , η̂(tn )⟩
j!k!
δ
η̂(t
)
.
.
.
δ
η̂(t
)
1
j+k
0
j=0 k=0
⟨
⟩
∫
∞
t
∑
1
δg[η̂]
dt1 . . . dtn Kj+1 (s, t1 , . . . , tn )
=
n!
δ η̂(t1 ) . . . δ η̂(tn )
n=0 0
∞ ∑
n
∑
(2.106)
(2.107)
(2.108)
を得る.これにより証明された.
2.5.3
一般化 Fokker-Planck 方程式 (有色ノイズ)
次に,有色ノイズについての時間発展方程式の導出を行う.導出には節 2.3.4 と同様に確率的
Liouville 方程式を用いる.まず確率的な確率分布関数P̂(x, t) = δ(x− X̂(t)) を定義する.p(x, t) =<
30
P̂(x, t) > が成立する.有色ノイズでは通常の計算規則が適応できるので,確率的 Liouville 方程
式は
]
∂ P̂(x, t)
∂ [˙
=−
X̂(t)P̂(x, t)
(2.109)
∂t
∂x
になる.確率微分方程式として
dX̂(t)
= a(t, X̂(t)) + b(t, X̂(t))η̂(t)
dt
(2.110)
を考えている場合は,確率的 Liouville 方程式は
]
∂ [
∂ P̂(x, t)
=−
(a(t, x) + b(t, x)η̂(t)) P̂(x, t)
∂t
∂x
となる.(2.111) の両辺の期待値を取り,Hänggi の公式 (2.100) を用いると
⟨
⟩
[
]
∞ ∫
n
∂p
∂
∂ ∑ t ⃗′ Kn+1 (t, ⃗t′ ) ∏
δ n P̂
= − ap −
b
dt
∂t
∂x
∂x
n!
δ η̂(t1 ) . . . δ η̂(tn )
0
n=0
(2.111)
(2.112)
i=1
となる.これが色付きノイズについての一般化 Fokker-Planck 方程式である.
2.5.4
相関時間についての摂動論
基礎方程式 (2.112) を見て分かる通り,色付きノイズの問題がそのまま解けることはあまりない.
なんらかの意味で近似を入れなければ解くことが出ない.そこで,次の様な問題設定について近似
解を求めよう:
• 平均 0 の有色 Gauss ノイズに駆動される確率微分方程式に従う
dX̂(t)
= a(X̂(t)) + b(X̂(t))η̂(t).
dt
(2.113)
• 有色ガウスの相関が Ornstein-Uhlenbeck 型
< η̂(t)η̂(s) >=
D − |t−s|
e τ
τ
(2.114)
であり,相関時間 τ を微小パラメータとする.即ち,系の特徴的時間スケール10 に比べて τ
が十分小さいものとする.
即ち,τ についての摂動論を行う [35].
Liouville 方程式を立て,Hänggi の公式を適応する.即ち P̂(x, t) = δ(x−X̂(t)), p(x, t) =
⟨ 先ず確率的
⟩
P̂(x, t) に対して
[
]
∂ P̂(x, t)
∂
∂
= − a(x) −
b(x)η̂(t) P̂(x, t)
∂t
∂x
∂x
⟨
⟩
∫ t
∂p(x, t)
∂
∂
δ P̂(x, t)
=−
[a(x)p(x, t)] −
b(x)
dsK2 (t, s)
∂t
∂x
∂x
δ η̂(s)
0
⟨
⟩
∫ t
∂
∂
∂
δ X̂(t)
=−
[a(x)p(x, t)] +
b(x)
dsK2 (t, s)
P̂(x, t)
∂x
∂x
∂x 0
δ η̂(s)
10 例えば,系の緩和時間など.
31
(2.115)
(2.116)
である.ここで,K2 (t, s) = (D/τ )e−(|t−s|/τ ) は |t−s| ≥ τ で急激に減少する.即ち,K2 は |t−s| ∼ τ
の範囲でしか寄与しない.τ → +0 であることを考え,Taylor 展開を行う
δ X̂(t)
δ X̂(t) d δ X̂(t) =
+
(s − t) + O(|t − s|2 ).
δ η̂(s)
δ η̂(t′ ) ′ dt′ δ η̂(t′ ) ′
t=t
(2.117)
t=t
では,(δ X̂(t)/δ η̂(t′ ))|t=t′ と (d/dt′ )(δ X̂(t)/δ η̂(t′ ))|t=t′ を求めよう.式 (2.113) を積分方程式
∫
t
X̂(t) = X̂(0) +
ds[a(X̂(s)) + b(X̂(s))η̂(s)]
(2.118)
0
に直し,η̂(t′ ) で変分する
δ X̂(t)
= b(X̂(t′ )) +
δ η̂(t′ )
∫
t
ds[a′ (X̂(s)) + b′ (X̂(s))η̂(s)]
t′
δ X̂(s)
δ η̂(t′ )
δ X̂(t)
∂ δ X̂(t)
= [a′ (X̂(t)) + b′ (X̂(t))η̂(t)]
.
∂t δ η̂(t′ )
δ η̂(t′ )
(2.119)
(2.120)
但し,a′ (x) = (da(x)/dx) を表す.初期条件を (δ X̂(t)/η̂(t)) = b(X̂(t)) で解くと,
δ X̂(t)
= b(X̂(t′ )) exp
δ η̂(t′ )
∫
t
ds[a′ (X̂(s)) + b′ (X̂(s))η̂(s)]
(2.121)
t′
となる.これを t′ で偏微分すると,
∂ δ X̂(t) ∂t′ δ η̂(t′ ) ]
[
)2 a(X̂(t)) ′
= − b(X̂(t))
b(X̂(t))
(
t=t′
(2.122)
となる.但し,[•] は • の X̂(t) に対する微分を表す.よって,この結果を式 (2.116), (2.117) に代
入すると
[
]
∂P
∂
∂
∂
= − a(x) + D b(x) c(x) P (x, t)
∂t
∂x
∂x
∂x
を得る.但し
{
[
a(x)
c(x) ≡ b(x) 1 + τ b(x)
b(x)
(2.123)
]′ }
(2.124)
である.
この結果は色々な方法によって再導出されている [36, 37, 38].経路積分を用いて直接相関を計
算するアプローチ [36, 37],ノイズの記憶を表す変数を追加し,Ornstein-Uhlenbeck 過程を含めた
Fokker-Planck 方程式を射影して導くアプローチなどがある [38].特に,Fox のアプローチ [36, 37]
によれば,
c(x) ≡
b(x)
]′
[
1 − τ b(x) a(x)
b(x)
(2.125)
が得られる.式 (2.125) は,τ についての最低次の摂動論としては式 (2.124) と同じであるが,一
様収束の観点から言うと式 (2.125) の方が好ましいことが知られている [37].特に,式 (2.125) は
τ → +∞ の極限で厳密になることが指摘されている [39].
32
2.5.5
ノイズの強度についての摂動論
次に,ノイズの影響が十分小さい場合の摂動論を行う.問題設定は次の様な状況である:
• 有色 Gauss ノイズに従う確率微分方程式に従う
dX̂(t)
= a(X̂(t)) + b(X̂(t))η̂(t).
dt
(2.126)
• 有色ガウスの相関が Ornstein-Uhlenbeck 型
< η̂(t)η̂(s) >=
D − |t−s|
e τ
τ
(2.127)
だとする.強度 D を微小パラメータとする.即ち,ノイズの分散が,系の特徴的な力の分
散11 に比べて十分小さいとする.
この問題設定では,ノイズ強度についての摂動論は D についての摂動論に帰着する [35].τ につ
いては全次数を考慮した摂動論を行う.即ち,
[
]
∞
δ X̂(t) ∑ (−1)n ∂ n δ X̂(t)
=
δ η̂(t′ )
n!
∂t′n δ η̂(t′ )
n=0
(t − t′ )n
(2.128)
t=t′
を計算する
⟩
δ X̂(t) dsK2 (t, s)
P̂(x, t)
δ η̂(t′ ) ′
0
t=t
⟩
⟨
∞
n
∑
δ
X̂(t)
∂
n n
=D
P̂(x, t) .
(−1) τ
∂t′n δ η̂(t′ ) ′
∫
t
⟨
n=0
(2.129)
(2.130)
t=t
ここで,(∂/∂t′n )(δ X̂(t)/δ η̂(t′ ))|t=t′ を計算しよう.例えば
[
[
]′ ]′
b(X̂(t))
∂ 2 δ X̂(t)
2
= a (X̂(t)) a(X̂(t))
∂t′2 η̂(t′ )
a(X̂(t))
[
[
]′ ]′
a2 (X̂(t)) b(X̂(t))
2
ˆ
+ b (X̂(t))
ξ(t)
b(X̂(t)) a(X̂(t))
(2.131)
(2.132)
であるが,項 (2.132) は高次の D のオーダーであり寄与しない.これらを無視すると
′
[
[
] ′ ]′
∂ n δ X̂(t)
b(
X̂(t))
= a2 (X̂(t)) a(X̂(t)) . . . a(X̂(t))
...
∂t′n η̂(t′ )
a(X̂(t))
(2.133)
であり,
⟩
n
∂
δ
X̂(t)
D
(−1)n τ n
P̂(x, t)
∂t′n δ η̂(t′ ) ′
n=0
t=t
]
[
}−1
{
∂
b(x)
P (x, t)
=D a(x) 1 + τ a(x)
∂x
a(x)
∞
∑
⟨
11 例えば,粘性力の分散など.
33
(2.134)
(2.135)
となる.ここで,関数 c(x) を次の式で定義する
[
]−1
∂
b(x)
c(x) ≡ a(x) 1 + τ a(x)
.
∂x
a(x)
これを用いて,分布関数の時間発展方程式は
[
]
∂
∂
∂
∂p(x, t)
= − a(x) + D b(x) c(x) p(x, t)
∂t
∂x
∂x
∂x
(2.136)
(2.137)
と書ける.
c(x) は次の常微分方程式の解としても与えられる
c(x) + τ [c′ (x)a(x) − c(x)a′ (x)] = b(x).
2.5.6
(2.138)
色付きノイズの近似としての情報ノイズ
節 2.5.4 と節 2.5.5 では色付きノイズの摂動論を扱った.どちらに於いても分布の時間発展方程
式は
[
]
∂p(x, t)
∂
∂
∂
= − a(x) + D b(x) c(x) p(x, t)
∂t
∂x
∂x
∂x
(2.139)
の形をしていた.ところで,式 (2.139) は次の様に変形できる
[
]
∂p(x, t)
∂
∂
∂
= − α(x) + D β(x) β(x) p(x, t),
(2.140)
∂t
∂x
∂x
∂x
√
但し,α(x) = a(x) + D(b′ (x)c(x) − b(x)c′ (x))/2, β(x) = b(x)c(x) である.式 (2.140) は強度 D
ˆ に従う確率微分方程式
の 白色Gauss ノイズ ξ(t)
dX̂
ˆ
= α(X̂(t)) + β(X̂(t))ξ(t)
dt
(2.141)
の Fokker-Planck 方程式と同じである.即ち,摂動論の範囲では有色ノイズに従う確率微分方程式
は,白色ノイズに従う別の形の確率微分方程式と対応することがわかる.
さて,この結果を物理的に解釈することを試みる.ノイズが系の状態に依存しない,即ち
dX̂(t)
∂V
=−
(X̂) + η̂(t)
dt
∂x
(2.142)
の様に足し算で入っている場合,
「ノイズが加法的である」という.逆に,ノイズが系の状態に依存
する,即ち,
∂ Ṽ
dX̂(t)
ˆ
=−
(X̂) + (1 + ϵ(X̂(t)))ξ(t)
(2.143)
dt
∂x
の様に掛け算で入ってくる場合,
「ノイズが乗法的である」という.通常の Langevin 方程式は式 (2.142)
の様に加法的に入ってくる.これは,Brown 粒子のスケールと溶媒のスケールが完全に分離してい
る為,溶媒の状態の緩和が十分早いと見なせる為,ノイズと系の独立性が成立するためである.しか
し,一般にはこの様な仮定が充たされるとは限らない.即ち,溶媒の状態緩和時間が有限の場合があ
りうる.これは確率微分方程式としては有色ノイズを扱うことに対応するであろう.今,η̂(t) が強度
ˆ を強度 D の白色ノイズとする.節 2.5.4 によれば,
D,相関時間 τ の有色ノイズとする.また,ξ(t)
式 (2.142) は τ に関する一次摂動の範囲で Ṽ (x) = V (x)−Dτ /2(∂ 2 V /∂x2 ), ϵ(x) = −τ /2(∂ 2 V /∂x2 )
の場合の式 (2.143) に対応する.即ち,乗法的ノイズは有色加法的ノイズの近似として物理系に現
れうるという解釈が可能である.
34
2.5.7
Wong-Zakai の理論
白色ノイズについての確率微分方程式はどの定義を用いるべきか,ということはこれまで度々
議論に上る.数学者は伊藤積分を好む.その理由は良い性質 (2.43) を持つ点,そして数学的な定
義の容易さによる.一方物理学者は Stratonovich 積分を好む場合が多い.その理由は色々ある.
例えば,物理学者にとって直観に合う計算規則が成立することが一つの理由に挙げられる.特に,
Wong-Zakai 理論 [27] が引き合いに出される事が最も強い根拠である.Wong-Zakai の理論の主
張は次の様になる:
「なだらかに変化する有色 Gauss ノイズと,それに駆動される確率微分方程式 (A) を考える.時
間相関が無限小の極限を考えた時の挙動を,別の白色の確率微分方程式 (B) で近似する事を考えよ
う.この場合,Stratonovich の定義のもと,(A) のノイズを白色ノイズに置き換えて (B) を構成す
ると,最も近似精度がよい.
」
という主張である.物理的なノイズは本質的には有色ノイズであり,白色ノイズは粗視化の結果得
られるある種の理想化だと考えられている.この立場に立つ場合は,Stratonovich 積分で定式化す
ることが良いが Wong-Zakai の理論によって保証されている.
35
第3章
3.1
Gauss 過程での揺らぎのエネルギー論
はじめに
3.1.1
平衡系の熱・統計力学
マクロ系の物理現象研究の歴史は長い.我々の身の周りの現象のほとんどがマクロ現象だから
だ.その中でも最も目覚ましい成果を上げたのは,平衡熱力学・平衡統計力学 [40, 41, 42, 43, 29]
であろう.これらによって,平衡系のマクロ現象はほぼ完全に理解できたといっても過言ではない.
平衡熱力学での最も重要な結論とは,熱と仕事の分離である.即ち,「力学的に自由に取り出す
ことが出来るエネルギーと,散逸によって自由に取り出せなくなってしまったエネルギーは別物で
ある」という認識が本質的であった.これらは熱力学第1法則と熱力学第2法則とに端的に纏めら
れている.熱力学第1法則は
∆U = ∆′ Q + ∆′ W
(3.1)
である.但し,U は内部エネルギー,∆′ Q は熱,∆′ W は仕事であり,この式はエネルギーの保存
を表している.また,∆′ Q, ∆′ W は熱が状態量ではなく,経路に依存する量である.熱力学第2法
則(Clausius の原理) によれば,「自然な状態では,熱は高温環境から低温環境に流れる」という.
即ち温度差などを利用してやらなければ,熱を仕事として取り出すことが出来ない.しかも利用で
きるエネルギーには必ず「無駄」がある事が知られている.これはマクロ現象特有の事である.
この様な「ミクロとマクロの違い」を普遍的な形で定量的に議論することに平衡熱力学は成功し
た.例えば,熱機関の原理的な熱効率を定量的に求めることに Carnot は成功している.こういっ
た定量的な議論にはエントロピーを導入することが便利である.熱力学第2法則はエントロピーを
導入して表現すると,次の様に定量的に表現される.孤立系において,全系のエントロピー S は
操作の前後で
∆S ≥ 0
(3.2)
となる.
また,系の熱力学変数を幾つか固定した状態で,非常にゆっくり操作 (準静的操作) した時に系
が実効的なポテンシャルエネルギーを持つように振舞う事も明らかにした.例えば,温度 T と体
積 V ,粒子数 N でマクロ状態指定する.今 T, N を固定した上で,V を準静的に操作する.この
時の系の応答は Helmholtz 自由エネルギーF = U − T S を用いて
∆W = F (T, V + ∆V, N ) − F (T, V, N )
(3.3)
となる.この場合の系の実効的なポテンシャルは F である.
この平衡熱力学の普遍性を足がかりに平衡統計力学が構築された.平衡統計力学によれば,(T, V, N )
36
図 3.1: Brown 運動の図
が指定されたマクロ状態の出現確率はカノニカル分布
1
r N ,⃗
pN )
− 1 H(⃗
e kB T
Z(T, V, N )
∫
r N ,⃗
pN )
− 1 H(⃗
Z(T, V, N ) ≡ d⃗rN d⃗
pN e kB T
P (⃗rN , p⃗N ) =
(3.4)
(3.5)
と書ける.但し,(⃗rN , p
⃗N ) は位相空間の座標であり,H(⃗rN , p⃗N ) は系のハミルトニアンである.ま
た,熱力学関数 F (T, V, N ) とは次の関係で表されることも明らかにされた
F (T, V, N ) = −kB T log Z(T, V, N ).
(3.6)
これにより,平衡系に関して言えば,原理的にはミクロ系からマクロ系の情報を完全に取り出すこ
とが出来るようになった.
3.1.2
Brown 運動
一方,非平衡系の研究はどのように進展したのだろうか?非平衡系で目覚ましい成果を上げた分
野に平衡近傍を調べる線型応答理論 [29] がある.線型応答理論と線型非平衡熱力学を組み合わせ
れば,平衡近傍の非平衡は理解し尽くされた,と考えられている.線型応答理論の成果は,久保公
式と揺動散逸定理である.
特に,揺動散逸定理は Brown 運動と絡めて語られることが多い.Brown 運動とは,平衡状態
にある溶媒に微小粒子を浮かべた時の,微小粒子の運動を指す (図 3.1).この現象は,
「平衡状態
の揺らぎと,その緩和を見ている」という意味で平衡近傍の現象である.即ち,この現象も線型
応答理論の適応対象になる1 .揺動散逸定理によれば,相関関数の Fourier 変換は,振動外場に対
する系の複素アドミッタンスと等しい.以前から知られていた粒子の移動度と温度の関係を表す
Einstein の関係式の一般化に,揺動散逸定理はなっている.この様に,平衡近傍の微小非平衡系
の研究が進んでいた.
3.1.3
揺らぎのエネルギー論
ここまで紹介したように,統計力学には二つの流れがあった.1つはマクロな平衡系の理論であ
り,もう1つは Brown 運動等の平衡近傍のミクロ非平衡の理論であった.この2つの流れを合流
1 Onsager の揺らぎの崩壊仮説によれば,平衡揺らぎの緩和と,平衡近傍の非平衡状態からの緩和は区別がつかない.線
型応答理論はこの仮定に立脚している.
37
Macroscopic
Heat Bath System
Heat Bath
図 3.2: マクロ系の熱力学
Microscopic
System
図 3.3: ミクロ系の熱力学
させる考え方が現れるのは自然な流れである.即ち,平衡近傍のミクロ非平衡系に,マクロ平衡系
と同じような熱力学構造を見出そうという考え方が現れた.模式的には次の様になる.マクロ熱力
学では図 3.2 の様に,マクロな熱浴にマクロな系を接触させ,マクロに操作する.それに対しミク
ロ熱力学とは図 3.3 の様に,マクロな熱浴にミクロな系を接触させ,ミクロに操作する.そして,
この後者がどのような熱力学構造を持つか模索する,ということである.
このアイディアを形にする為の一つのアプローチに揺らぎのエネルギー論 [17, 18, 44] がある.
揺らぎのエネルギー論は,熱浴中のブラウン運動の熱力学的構造を模索した.図 3.3 との対応を考
えるなら,ミクロ系に対応するのがブラウン粒子に対応するわけである.揺らぎのエネルギー論の
大雑把なセットアップは次の様なものである:
• ブラウン運動する粒子を考える.即ち,熱浴に接する一粒子の運動を議論する.
• 熱浴の情報をトレースアウトし,粒子は確率的に振舞うものとする.数学的には,粒子の運
動が何らかの確率微分方程式に従うと仮定する.
• この粒子にミクロな操作を加える.例えば,粒子を光ピンセットで補足し,光ピンセットの
光圧を変えたりする.こういった操作に対して,何らかの熱力学的構造はあるか?
数学的にいうと,確率過程に埋め込まれた熱力学的構造を議論していることになる.結果,Gauss
ノイズに従う平衡近傍の現象には熱力学構造があることがわかった2 .
この揺らぎのエネルギー論は色々な分野で使われ,多大な成功を収めた.例えば,微小系での
Carnot サイクル,Carnot 効率などが導出された [45].力学系で導出された Jarzynski 等式,揺ら
ぎの定理が揺らぎのエネルギー論の枠組みでも再導出された.また,Jarzynski 等式,揺らぎの定
理の実験的な検証は生物分子系やコロイド粒子系で行われたが,揺らぎのエネルギー論の枠組みに
従って実験的データ解析が行われた.
揺らぎのエネルギー論の構築に当たって最も鍵となったのは,1つのトラジェクトリー (1回の
試行) に対して熱力学量を定義することだった.特に,熱力学の本質である熱と仕事の分離を1つ
のトラジェクトリーについて拡張する点が理論の肝である.マクロ系の熱力学量は多数回のアンサ
ンブル平均を取った状態で定義されており,一回きりの試行については熱力学量が定義されていな
い.これは,熱力学極限が成立するマクロ系では熱力学量の揺らぎが十分無視できるからであった.
ところがミクロ系では揺らぎは十分大きく,無視することができない.すなわち,熱力学量の揺ら
ぎ自体を議論することが必要となる.このためには1つのトラジェクトリーについて熱力学量を定
義することが必要になる.数学的には,熱力学量を確率変数として定義することと同値である.
この問題を解決する際に肝となったのは,熱力学量を定義する積分の選び方である.第2章で
散々述べたように,確率過程は数学的に丁寧に扱わなければならない.確率微分方程式で系を記述
する以上,確率積分の定義に気を払わなければならない.結論から言えば熱は Stratonovich 積
分の意味で定義しなければならない.何故なら,熱を Stratonovich 積分以外の積分で定義する
2 平衡近傍とは,粒子の従う確率微分方程式が狭い意味での
38
Langevin 方程式 (3.7) (3.8) である事を指す.
と,熱力学第1法則がミクロ系において形式的に破れてしまうからだ.この主張は実験的にも確か
められており,データ解析などはこの主張に沿って行われている.
3.1.4
この章の構成
この章では揺らぎのエネルギー論の定式化を行う.まず,揺らぎのエネルギー論の基礎方程式で
ある Langevin 方程式の説明を行う.そして,熱・仕事を確率変数として定義し,微小系の熱力学
第1法則を導出する.次に,定義された熱・仕事の性質を調べるため,熱力学不等式の導出を行う.
具体的には Helmholtz 自由エネルギーを定義し,熱力学第2法則を導出する.また,近年注目を
集めている Jarzynski 等式の説明を行う.次に,具体的な例を取り扱う.微小系での熱伝導の模型
を扱う.最後に,非 Gauss 過程に拡張する場合に解決すべき問題を述べる.
3.2
3.2.1
Langevin 方程式
Underdamped Langevin 方程式
先ず最初に揺らぐ世界の基礎方程式を説明する.今,溶媒は平衡状態にあるとする.溶媒中の
Brown 粒子は,速度に比例する決定論的な粘性力と,水分子の乱雑な運動に起源する確率論的な
ランダム力を受ける.また,レーザーピンセットなどの外部装置で粒子をトラップしている時は,
ポテンシャル力を受ける.今外部操作のパラメータを α とおく.この α はレーザーピンセットの
光圧などである.Brown 粒子の運動量を p̂(t),位置座標を x̂(t),ポテンシャルを V (x, α, t),ラン
ˆ ,粒子の質量を m,粘性率を γ とおくと,
ダム力を ξ(t)
dp̂(t)
γ
∂V
ˆ
= − p̂(t) −
(x̂(t), α) + ξ(t)
dt
m
∂x
dx̂(t)
p̂(t)
=
dt
m
(3.7)
(3.8)
とモデル化できる.この式を Underdamped Langevin 方程式という.この式は速度変化が見え
る時間スケール τv ∼ m/γ での現象記述を行っている.実際の実験ではこの時間スケールまで観測
を行うことは難しい3 ので,次の Overdamped Langevin 方程式がよく使われる.
3.2.2
Overdamped Langevin 方程式
次に,実際の実験で測定可能な時間スケールを記述する方程式を説明する.Underdamped Langevin
方程式は速度減衰が見える時間スケール τv ∼ m/γ での現象を記述するが,測定の時間スケール τ
が τ ≫ τv のときは慣性項 dp̂/dt を落とすことができる.結果,
γ
dx̂(t)
∂V
ˆ
=−
(x̂(t), α) + ξ(t)
dt
∂x
(3.9)
という確率微分方程式を得る.この式を Overdamped Langevin 方程式という.
Overdamped Langevin 方程式の導出は,運動量消去の問題として種々の問題設定のもとで研究
されている [46, 47, 48].例えば,温度が位置に依存する場合や,摩擦係数が場所に依存する場合
などについても研究されている.
3 近年の目覚しい実験技術の発展により,少しずつ実験が可能になってきている.例えば,文献 [5, 6] の実験では速度
減衰まで観測されている.
39
3.2.3
揺動散逸定理
さて,ここまではノイズの性質について言及してこなかった.ノイズの性質を入れて初めて確率
微分方程式 (3.7)(3.8)(3.9) は数学的に閉じたものになる.中心極限定理により,物理系に現れるノ
イズは Gauss ノイズであることが多い.そこで,ここでは仮に Gauss ノイズに従うと仮定して議
論を進める.具体的にどういう状況であれば Gauss ノイズとみなせるかは第6章で定量的に議論
するものとしよう.Brown 粒子は水分子より遥かに大きいので,溶媒の緩和時間スケールは十分
ˆ を次のようにモ
短いものとする.結果,ノイズの時間相関は無視できる.すなわち,ノイズ ξ(t)
デル化する
⟨
⟩
⟨
⟩
ˆ
ˆ ξ(s)
ˆ
ξ(t)
= 0, ξ(t)
= σ 2 δ(t − s).
(3.10)
ただし,σ 2 はノイズの分散である.溶媒は平衡状態にあると仮定したので,Brown 粒子の自由運
動 V (x, α) = 0 の定常状態は平衡状態である.平衡状態では,エネルギー等分配則が成立する.即
ち,温度 T を用いて
⟨
p̂2
2m
⟩
=
t→∞
kB T
2
(3.11)
と書ける.これと Underdamped Langevin 方程式が整合するためには
σ 2 = 2γkB T
(3.12)
が成立しなければならない.結果としてノイズには
⟨
⟩
ˆ ξ(s)
ˆ
ξ(t)
= 2γkB T δ(t − s)
(3.13)
⟨ ⟩
という制限が課される.式 (3.13) は揺動散逸定理という4 .また,粒子の移動度 D を, x̂2 /t →
2D (t → +∞) で定義すると,
kB T
(3.14)
γ
が成立することを示せる.この式を Einstein の関係式という.この式も揺動散逸定理の一部で
D=
ある.
3.2.4
分布関数の時間発展
次に,Brown 粒子の確率分布関数を考えよう.第2章とほぼ同じ議論を行えば導出できる.Un-
derdamped Langevin 方程式の場合,Kramers 方程式
[
{
}
]
∂P (x, p, t)
∂ p
∂
γ
∂V
∂2
= −
+
p+
+ γkB T 2 P (x, p, t)
∂t
∂x m ∂p m
∂x
∂p
を得る.この偏微分方程式は定常解を持つ場合,定常分布はカノニカル分布
[
( 2
)]
1
p
Peq (x, p, α) = C exp −
+ V (x, α)
kB T 2m
(3.15)
(3.16)
になる.即ち,平衡統計力学の結果と整合的である.ところでこの式は一種の確率の保存を表して
いる.実際,確率流を次の式
p
P (x, p, t),
m
[
]
∂V
γ
∂
Jp (x, p, t) ≡ −
− p − γkB T
P (x, p, t)
∂x
m
∂p
Jx (x, p, t) ≡
4 正確には第2種揺動散逸定理と呼ばれ,一般の揺動散逸定理の一部である.
40
(3.17)
(3.18)
で導入すると Kramers 方程式 (3.15) は
∂Jx
∂Jp
∂P
(x, p, t) +
(x, p, t) +
(x, p, t) = 0
∂t
∂x
∂p
(3.19)
という連続の式になる.
Overdamped Langevin 方程式の場合は,Fokker-Planck 方程式
[
]
∂P (x, t)
1 ∂ ∂V
∂
=
+ kB T
P (x, t)
∂t
γ ∂x ∂x
∂x
を得る.この方程式が定常解を持つ場合,定常分布はカノニカル分布
[
]
1
Peq (x, α) = C exp −
V (x, α)
kB T
になる.即ち,この結果も平衡統計力学の結果と整合的である.実際,確率流を次の式
[
]
1 ∂V
∂
Jx (x, t) ≡ −
+ kB T
P (x, t)
γ ∂x
∂x
(3.20)
(3.21)
(3.22)
で導入すると Fokker-Planck 方程式 (3.20) は
∂P
∂Jx
(x, t) +
(x, t) = 0
∂t
∂x
(3.23)
という連続の方程式になる.
3.3
3.3.1
熱力学第1法則
仕事・熱の定義 (Underdamped Langevin 方程式)
では,1つのトラジェクトリーでの仕事・熱の定義を行う.マクロ系熱力学での仕事・熱の分離
の本質は次のようなものだった:
• マクロな自由度を通じてのエネルギー移動=仕事,
• ミクロな自由度を通じてのエネルギー移動=熱.
ミクロ系では.マクロな自由度とは操作パラメータ α であり,ミクロな自由度とは粘性,ランダム
力である.よって次のように仕事・熱を定義するのが良いであろう
( γ
)
∂V
(x̂, α)dα, d′ Q̂ ≡ − p̂ + ξˆ ◦ dx̂.
d′ Ŵ ≡
∂α
m
(3.24)
但し,熱は Stratonovich 積分の意味で定義を行う.この定義を用いると,熱力学第1法則がミク
ロ系に拡張できる
dÊ = d′ Ŵ + d′ Q̂.
(3.25)
但し,Ê ≡ p̂2 /2m + V (x̂, α) はミクロ系の内部エネルギーである.事実,
∂V
∂V
p̂
◦ dp̂ +
dx̂ +
dα
m (
∂x
∂α )
γ
∂V
∂V
= dx̂ ◦ − p̂ −
+ ξˆ +
dx̂ + d′ Ŵ
m
∂x
∂x
dÊ =
= d′ Ŵ + d′ Q̂
(3.26)
(3.27)
(3.28)
41
である.ここで,Stratonovich 積を用いると通常の計算規則が成立することを用いた.
ここで二つ注意することがある.1つは,熱は Stratonovich の意味で定義しなければならない
ということ.1つは,ここでの内部エネルギーはある種の自由エネルギーであり,厳密な意味での
内部エネルギーではないということである.
まず,熱が Stratonovich の意味で定義されなければならない理由を述べる.結論から言うと,
Stratonovich の意味で定義しなければ,熱力学第1法則と不整合になるからだ.例えば,熱を伊藤
の意味で定義すると仮定しよう.即ち,
d′ ŴI ≡
( γ
)
∂V
(x̂, α)dα, d′ Q̂I ≡ − p̂ + ξˆ · dx̂
∂α
m
(3.29)
と定義すると,
(
)
p̂
γkB T
∂V
∂V
dÊ =
· dp̂ +
dt +
dx̂ +
dα
m
m
∂x
∂α
)
(
γ
∂V
∂V
γkB T
= dx̂ · − p̂ −
+ ξˆ +
dx̂ + d′ ŴI +
dt
m
∂x
∂x
m
γkB T
= d′ ŴI + d′ Q̂I +
dt
m
(3.30)
となり,仕事と熱以外に平均的なエネルギー流が発生することになる.即ち,熱力学第1法則と整
合しない.この様に,仕事と熱のエネルギーバランスの式は,通常の計算規則が成立する積分――
即ち Gauss 過程なら Stratonovich 積分――の意味で定義されなければならない.
次に,ここで定義された内部エネルギーは通常の意味での内部エネルギーではないことを説明す
る.ここで定義されたエネルギーは,粒子の運動量と位置座標に対して定義されたエネルギーであ
る.しかし,Langevin 方程式に従うと仮定した段階で,色々な情報が捨てられている.その意味
で既に (x̂(t), p̂(t)) は粗視化された変数である.また,ミクロな意味での内部エネルギーは,溶媒
粒子からのポテンシャルエネルギーの影響も含むが,その影響はランダム力 ξˆ の形でしか運動には
寄与せず,Ê にも含まれていない.つまり,粗視化された変数を用いて構築された内部エネルギー
であるという点,溶媒粒子などが作るポテンシャルエネルギーが考慮されていないという点で,通
常の意味での内部エネルギーではない.
3.3.2
仕事・熱の定義 (Overdamped Langevin 方程式)
Overdamped Langevin 方程式の場合も熱・仕事の定義は式 (3.24) と変わらない.代わりに,内
部エネルギーの定義を変化させる必要がある.Overdamped Langevin 方程式では,運動量の情報
を落としたスケールで現象を観測しているので,運動量由来のエネルギーの項 p̂2 /2m の項を平均
⟨
⟩
化するのが良いであろう.即ち,内部エネルギーを Û ≡ p̂2 /2m eq + V (x̂, α) = kB T /2 + V (x̂, α)
で定義する.ここでエネルギー等分配側を用いた.この Û に対してミクロ系の熱力学第1法則が
成立する
dÛ = d′ Ŵ + d′ Q̂.
42
(3.31)
3.3.3
平均熱流の積分表現
⟨
⟩
d′ Q̂/dt のシンプルな表現を紹介する.先ず,Underdamped Langevin 方程
式 (3.7)(3.8) の場合を考える.結論としては平均熱流は次のように表すことが出来る
⟨
⟩ ∫
[
]
d′ Q̂
∂E
∂E
= dxdp
Jx +
Jp .
(3.32)
dt
∂x
∂p
次に平均熱流
但し,E(x, p, α(t)) ≡ p2 /2m + V (x, α(t)) である.証明は
⟨
⟩ ⟨
⟩
d′ Ŵ
d′ Q̂
dÊ
=
−
dt
dt
dt
∫
∫
∂
∂E dα
= dxdp (EP ) − dxdp
P
∂t
∂α dt
∫
∂P
= dxdpE
∂t
[
]
∫
∂Jx
∂Jp
= − dxdpE
+
∂x
∂p
[
]
∫
∂E
∂E
= dxdp
Jx +
Jp
∂x
∂p
(3.33)
(3.34)
(3.35)
(3.36)
(3.37)
である.但し,最後の行への変形は部分積分を用いた.
同様に,Overdamped Langevin 方程式の場合は次の様になる
⟩ ∫
⟨
∂U
d′ Q̂
= dx
Jx ,
dt
∂x
(3.38)
但し,U (x, α(t)) ≡ kB T /2 + V (x, α(t)) である.証明は Underdamped の場合と同じである.
3.4
3.4.1
熱力学第2法則
擬似 Helmholtz 自由エネルギー
この節では揺らぐ世界の熱力学第2法則を説明しよう.扱う基礎方程式は簡単のため,Over-
damped Langevin 方程式 (3.9) とする.熱力学第2法則は自由エネルギーと絡めて説明される.擬
似 Helmholtz の自由エネルギー F̃ (T, α) を次の様に定義する
⟨ ⟩
F̃ ≡ Û − T S,
∫
S ≡ −kB dxP log P.
この F̃ に対して熱力学第2法則は次式で表される
⟩
⟨
dF̃
d′ Ŵ
≥
.
dt
dt
43
(3.39)
(3.40)
(3.41)
証明は次の様に行われる
⟩
⟨
⟩
⟨
)
dF̃
∂ Û
d (⟨ ⟩
d′ Ŵ
−
=
−
Û − T S
dt
dt
∂α
dt
⟨
⟩
∂ Û dx̂
dS
=−
◦
+T
∂ x̂ dt
dt
∫
∫
∂U
∂P
Jx − kB T dx
log P
= − dx
∂x
∂t
∫
∫
∂U
∂Jx
= − dx
Jx + kB T dx
log P
∂x
∂x
∫
∫
∂U
Jx
∂P
= − dx
Jx − dx kB T
∂x
P
∂x
)
(
∫
∫
∂U
Jx
∂U
= − dx
Jx + dx
γJx +
P
∂x
P
∂x
∫
γ
= dx Jx2
P
≥ 0.
(3.42)
この F̃ は熱力学で言う自由エネルギーとは違うことに注意しよう.この擬似自由エネルギーの
増大則は初期条件が平衡状態で無くても成立する.平衡マクロ熱力学と直接関係ある Helmholtz 自
由エネルギーについては次の小節で説明する.
3.4.2
Helmholtz 自由エネルギー
等温過程を考えよう.等温過程での仕事は次の式で書ける
∫ α(tf )
∂V Ŵ =
dα(t)
∂α α(ti )
.
(3.43)
x̂(t),α(t)
ここで準静的過程を考える.準静的過程とは,外部パラメータを十分ゆっくり操作した極限の過程
として定義される.具体的には,外部パラメータを固定した状態で分布が平衡分布に収束する時間
スケールを τP とした時,外部パラメータを変化させる時間スケール τp が τp ≫ τP であれば良い.
この場合では,任意の時刻において平衡分布が実現していると考えられるので,仕事は確率 1 で収
束し,
∫
Ŵ →
αf
αi
[
]
∂V
Peq (x, α; T )dx dα
∂α
= F (T, αf ) − F (T, αi )
になる.但し,Helmholtz 自由エネルギー F (T, α) を
∫
V (x,α)
−
F (T, α) ≡ −kB T log e kB T dx + (αによらない項)
(3.44)
(3.45)
として導入した.この Helmholtz 自由エネルギー F (T, α) に対して平衡マクロ熱力学で言うとこ
ろの熱力学第2法則が成立することが示せる.即ち,初期条件と終状態を熱平衡に取る.この時,
系にどんな操作を加えても,次の不等式が成立する
⟨ ⟩
Ŵ ≥ ∆F.
44
(3.46)
Thermal bath
Thermal bath
vane
vane
図 3.4: 回転 Brown 運動を用いた熱伝導のモデリング
但し,等号は準静的過程でのみ成立する.この不等式の非自明な部分とは,操作パラメータの速度
に一切依存しないところである.証明は Jarzynski 等式について述べた次節で行う.
3.4.3
Jarzynski 等式
Jarzynski は,始状態と終状態が平衡状態であれば,その間にどのような非平衡な操作を行って
も次の等式が成り立つことを示した [10]
⟩
⟨
− ∆F
− kŴT
B
= e kB T .
(3.47)
e
この等式ははじめ力学系で示された.後に Crooks が,詳細釣り合いが成立するとは限らない定常
状態から出発する Markov 過程に対しても同じ形式の等式が成り立つことを示した [49].ここで,
⟨
⟩
常にに成り立つ Jenssen 不等式 e−⟨ẑ⟩ ≤ e−ẑ を用いると,熱力学第2法則
⟨ ⟩
Ŵ ≥ ∆F
(3.48)
が導出される.
3.5
微小系の熱伝導
次に微小系での熱伝導現象を考えよう [18].まず,温度 T1 ,T2 (T1 > T2 ) の熱浴を用意する.そ
して,その間にミクロな導線をつなぐ.両熱浴に温度差がある為,導線を通じて熱流が生じる.
この状況を揺らぎのエネルギー論の枠組みで議論する.導線を,回転 Brown 運動の組み合わせに
よってモデル化しよう.具体的には,図 3.4 の様な系を考える.両熱浴にミクロサイズの羽根車を
取り付けており,回転 Brown 運動する.そして両羽根車の動きを同期させる捻じれバネが取り付け
てあるとしよう.この系を白色 Gauss
ノイズ⟩ξˆ1 , ξˆ2 で駆動される確率微分方程式でモデル化する事
⟨
⟨
⟩
ˆ
を考える.但し,揺動散逸関係式 ξ1 (t)ξˆ2 (s) = 2γ1 kB T1 δ(t − s), ξˆ2 (t)ξˆ2 (s) = 2γ2 kB T2 δ(t − s)
を充たすとする.両羽根車の回転角を x̂1 , x̂2 として,確率微分方程式は
∂V
dx̂1
=−
+ ξˆ1 ,
dt
∂ x̂1
dx̂2
∂V
γ2
=−
+ ξˆ2
dy
∂ x̂2
γ1
(3.49)
(3.50)
(3.51)
となる.但し
V =
K
(x̂1 − x̂2 )2
2
45
(3.52)
である.ここで,K は両羽根車を繋ぐ捻じれバネのバネ定数である.
このモデルにおける定常熱流は次の式で与えられる
⟩
⟨
⟩
⟨
d′ Q̂2
KkB
d′ Q̂1
=−
=
(T1 − T2 ) > 0.
dt
dt
γ1 + γ2
(3.53)
即ち,熱は高温部分から低温部分に向けて流れる. (3.53) 式は熱流が温度差に比例して流れると
いう Fourier の法則を再現している.ここで, (3.53) 式の導出の途中で
∫
t
dsδ(t − s) =
0
1
2
(3.54)
を用いたことに注意しよう.これが直観的に正しいことはわかるが,何故 1/2 で良いのかについて
は後の章5 で説明する.
3.6
非 Gauss 過程に向けて
揺らぎのエネルギー論の枠組みは,非 Gauss ノイズに駆動される場合について拡張されていな
かった.この理由は,主に二つある.一つは,非 Gauss 過程では Stratonovich 積分を用いても
通常の計算規則が使えず,熱と仕事のバランスの式をどの積分で解釈すれば良いかわからない点で
ある.即ち,熱力学第一法則を表現するためには,伊藤積分,Stratonovich 積分以外の積分定義
が必要となる.
もう一つは,非 Gauss 過程では多点デルタ関数が出現する.端点を含む多点デルタ関数の積分
値がいくらになるかよくわからない点が挙げられる.例えば,2点デルタ関数なら
∫ ∞
1
dt1 δ2 (0, t1 ) =
2
0
とすれば良かったが,3点デルタ関数 δ3 (0, t1 , t2 ) の積分
∫ ∞
∫ ∞
dt1
dt2 δ3 (0, t1 , t2 )
0
(3.55)
(3.56)
0
がどうなるかは非自明である.一般には n 点デルタ関数 δn (0, t1 , . . . , tn−1 ) に対する端点を含む積
分の値が問題となる.この積分は熱流の計算に現れる為,非常に重要な積分である.この2つの問
題を解決していくことが本研究の上で重要になってくる.
5 4章の
n 点デルタ関数についての節.
46
第 II 部
本論
第4章
4.1
非 Gauss 確率過程での ∗-積分
はじめに
揺らぎのエネルギー論は加法的な Gauss ノイズのみを題材としており,それ以外のノイズを題
材としてこなかった.この為,平衡状態近傍にある環境しか扱うことができなかった.そこで,非
平衡状態にある環境を記述する一つの方法論として,非 Gauss ノイズを導入する方法を取り扱う.
非 Gauss ノイズは,図 2.2 の点線で示した「経路が連続でない」確率過程を取り扱う上で必要と
なり,多くの物理系が非 Gauss 過程に従うと信じられている.実際,非平衡状態の環境に接する
生物系の現象が非 Gauss ノイズによってモデル化出来ることが報告されている [22, 23].
ところで,非 Gauss ノイズに駆動される系について揺らぎのエネルギー論が展開できない理由
とはなんであろうか?数学的には,次の2点に問題がある:
• 通常の計算規則が使用出来る解析方法が分からない為,熱力学量をどの様に定義して良いか
わからない.
• 熱流の計算の際,多点デルタ関数の端点を含む積分が現れる.この積分値が特定できない為,
熱流が計算できない.
これらの問題を解決するのが本章の目的である.具体的にはこれら2つの問題を統一的に解決する
∗-解析を導入する.まず,非 Gauss 過程での通常の計算規則が伊藤解析や Stratonovich 解析では
成立しないことを説明する.次に,∗-積分の導入を行う.多点デルタ関数の端点積分を,∗-解析の
枠組みから導出する.∗-積分から伊藤積分への変換公式を導出する.
4.2
非 Gauss 過程での通常の計算規則
非 Gauss 過程での確率積分について考えよう.Gauss 過程では,通常の計算規則を用いたけれ
ば Stratonovich 解析を用いればよかった.ところで,非 Gauss 過程では Stratonovich 解析のも
とで通常の計算規則は使えるのだろうか?この問いに対して「使える」と思っている人は非常に多
い.事実,多くの論文がその前提のもとで出版されている [50, 51, 52, 53].しかし,以下のように
考えると,この前提は直観的に非常に怪しいことがわかる.
Gauss 過程で Stratonovich 解析を定式化する時に使った一番重要な公式は式 (2.31) である.こ
れにより,ノイズについては 2 次についてまでしか考慮しなくて良いことが保障された.ところで
Stratonovich 積分は台形公式であり,数値計算のセンスで言うなら 2 次精度の公式である.よっ
て,2 次までしか寄与しない Gauss 過程ではノイズの影響を全て取りつくしていると言え,通常
の計算規則が使える.ところが,非 Gauss 過程では全次数のノイズの影響が関わってくる為,台
形公式では全てを取りつくすことが出来ないように思われる.即ち,Stratonovich 解析を用いて
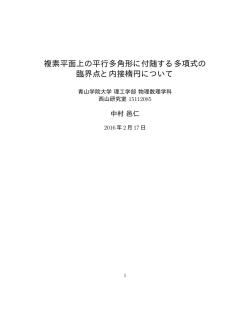
も通常の計算規則が扱えないことが予想される.事実,この予想は図 4.1 に端的に現れるように,
本研究によって実証されることになる [24].
48
1
0.5
Stratonovich
0
0.5
1
1.5
2
図 4.1: Stratonovich 積分では通常の計算規則が成立しない事を示すグラフ.Poisson ノイズの分散
を λI 2 = 4 に固定し,初期条件 X̂(0) = Ŷ (0) = 1 のもと,t = 1.0 までシミュレーションを行った.
非 Gauss 性の指標である I が大きくなるにつれ,Z は 1 からずれている.I → 0 の極限でのシミュ
レーションは行っていない.但し,Gauss 極限では理論的に Z = 1 なので Open Circle で記した.
Stratonovich 解析のもとで通常の計算規則が使えないことを示す為に,以下の様な手順を取る.
まず,非 Gauss ノイズに駆動される,Stratonovich 型確率微分方程式を用意する.通常の計算規
則が使えるとして仮定したときの形式解と数値計算の結果を比較する.もし両者がずれていれば,
通常の計算規則が使えないことが実証されたことになる.
確率微分方程式の例としては,
dX̂
ˆ ◦ X̂
= (−1 + ξ)
dt
(4.1)
を考える.但し,ξˆ は強度が I ,遷移率が λ の Poisson ノイズとする.この方程式は Stratonovich
型で定義された Black-Sholes 方程式である.通常の計算規則が使えるとして仮定したときの形
式解は
[
]
∫ t
ˆ
Ŷ = Ŷ (0) exp −t +
dsξ(s)
(4.2)
0
⟨
⟩
である.数値計算の結果を比較したグラフは図 4.1 である.このグラフでは Z = X̂/Ŷ を調べ
ている.通常の計算規則が成立しているならば Z = 1 が成立するはずであるが,ノイズの強度を
上げるにつれて 1 からずれていることが見て取れる.
この事から,通常の計算規則が使える解析方法は Stratonovich 解析ではないことがわかった.揺
らぎのエネルギー論を論じるには通常の計算規則が重要であった為,新たな解析が必要とされるこ
とがわかった.そして,本研究によってその解析方法が発見された [24].本章では,通常の計算規
則が使える解析方法である ∗-解析の説明を行う.
4.3
∗-積分の定義
この節では通常の計算規則が使える積分の定義を行う.この解析方法を我々は ∗-解析と呼ぶこ
とにする.まず,∗-解析の基本的なアイディアを述べる.白色ノイズに従う確率過程で通常の計算
規則が使えないのは,白色ノイズの特異性に起因していた.よって,特異性がないノイズである有
色ノイズで議論している限りは通常の計算規則は使える筈である.逆に言えば,有色ノイズの自然
な極限として白色ノイズを定義することができれば,通常の計算規則が使えることになる1 .
1 伊藤型の定義は有色ノイズの極限ではない.このことは
Wong-Zakai 理論 [27] が示している.
49
-function
delta-limit
smoothing
図 4.2: ϵ-smoothing のイメージ図
4.3.1
定義
では,∗-解析のアイディアに則って,相関時間 ϵ のノイズを次の式で定義する
1∑ˆ
ξˆϵ (ti ) ≡
ξ(ti−j ).
l j=0
l−1
(4.3)
但し,l = ϵ/∆t は整数である.このノイズは
l ステップ=ϵ 時間の相関を持つ.事実,このノイズ
⟨
⟩
ˆ
ˆ
は |t − s| > ϵ の場合のみ ξϵ (t)ξϵ (s) = 0 である.この操作を ϵ-smoothing と呼ぶことにする.
図 4.2 に ϵ-smoothing のイメージ図を表した.この ϵ-smoothing を適用したノイズを用い,∗-積分
を次の式で定義する
∫
t
ˆ ∗ f (X̂(t)) ≡ lim
dsξ(t)
lim
ϵ→+0 ∆t→+0
0
n
∑
∆tξˆϵ (ti )f (X̂(ti )).
(4.4)
i=1
この積分定義は,有色ノイズからの極限として白色ノイズを定義することになる.よって,この積
分を使う限りは特異性を考えずに済む.
4.3.2
通常の計算規則 (The Ordinary Calculus)
この積分を用いて確率微分方程式の定義を行う.即ち,
dx̂
= a(x̂) + b(x̂) ∗ ξˆ
dt
⇐⇒
∫ t
∫ t
ˆ ∗ b(x̂(s))
dsa(x̂(s)) +
dsξ(s)
x̂(t) = x̂(0) +
0
(4.5)
(4.6)
0
と定義する.確率微分方程式がこの方法で定義されている場合は,通常の計算規則が使用出来る.
何故なら,この定義を用いる限りは微小時間で見ればノイズは有色になるからである.
ここで一つの数値的デモンストレーションを行う.次の Black-Sholes 型確率微分方程式の数値
シミュレーションを行う.即ち,
dX̂
ˆ ∗ X̂
= (−1 + ξ)
dt
(4.7)
を初期条件 X̂(0) = 1 のもとで時刻 t = 5.0 まで数値計算を行う.但し,ξˆ は強度 I, 遷移率 λ の
Poisson ノイズである.∗ 型の確率微分方程式 (4.7) の形式解は
[
]
∫ t
ˆ
Ŷ = exp −t +
dsξ(s)
0
50
(4.8)
1
Stratonovich
-integral
0.5
0
0.5
1
1.5
2
図 4.3: ∗-解析を用いた時に通常の計算規則が使えることの数値検証.赤実線が ∗ 積分での解析
(式 (4.7)) であり,青実線が Stratonovich 積分での解析 (式 (4.1)) である.分散を λI 2 = 1.0 で固
定し,非 Gauss 性の尺度である強度を変えて数値計算した.Gauss 極限 λ → +0 の数値計算を行っ
ていないが,論理的に 1 になる筈なので,Open Circle で示した.
⟨
⟩
である.図 4.1 と同様に,Z = X̂/Ŷ を図 4.3 で調べた.また,Stratonovich 積分での BlackSholes 方程式 4.1 の計算結果も併記した.通常の計算規則が使用できるなら,確率微分方程式の
解とその形式解は一致するはずであり,Z = 1 となる.結果を図 4.3 に示す.横軸の強度 I は非
Gauss 性の指標であり,右に行くほど非 Gauss 性が強いことを表している.∗-積分で定式化すると
非 Gauss 性に寄らず Z ≃ 1 であり,Stratonovich 積分で定式化すると非 Gauss 性が強くなるにつ
れて Z が 1 からずれていくことがわかる.これは,∗-解析で定式化したときのみ通常の計算規則
が使える,ということを示している.
4.3.3
n 点デルタ関数
非 Gauss 過程において通常の計算規則が使える積分の正体は明らかにされた.次の問題は,こ
の積分定義での計算規則である.特に,多体デルタ関数の扱いが問題となる.非 Gauss 過程では 3
ˆ を考える.例えば 3 次
次以降のキュムラントが重要な意味を持つ.今,平均値が 0 のノイズ ξ(t)
以上のキュムラントは,
⟨
ˆ 1 )ξ(t
ˆ 2 )ξ(t
ˆ 3)
ξ(t
⟩
c
⟨
⟩
ˆ 1 )ξ(t
ˆ 2 )ξ(t
ˆ 3)
= ξ(t
= K3 δ3 (t1 , t2 , t3 )
(4.9)
の形で表すことが出来る.但し,δ3 (t1 , t2 , t3 ) は 3 点デルタ関数である.3 点デルタ関数は次の性
+∞ (t = t = t )
1
2
3
,
δ3 (t1 , t2 , t3 ) =
0
( それ以外 )
質で定義される:
∫
∫
∞
−∞
dt1
(4.10)
∞
−∞
dt2 δ3 (t, t1 , t2 )f (t1 , t2 ) = f (t, t).
(4.11)
キュムラントの表現にデルタ関数が現れるのは,異時刻相関がないことを表現する際に性質 (4.10)
が必要になるからである.
さて,デルタ関数の扱いで問題になるのは端点の扱いである.例えば,揺らぎのエネルギー論で
51
熱流を計算する際には,次の様な積分が現れる
∫ t
dt1 δ2 (t, t1 ),
∫
∫
t
t
dt1
dt2 δ3 (t, t1 , t2 ),
0
∫
(4.12)
0
(4.13)
0
...
∫
t
(4.14)
t
dt1 . . .
dtn δn+1 (t, t1 , . . . , tn ),
0
(4.15)
0
但し,t > 0 である.Gauss 過程の揺らぎのエネルギー論では,2 体デルタ関数しか出てこない.こ
の場合,
∫
t
dt1 δ2 (t, t1 ) =
0
1
2
(4.16)
とすれば良いことが知られている.これは直観的に明らかと思うかもしれないが,そう単純ではな
い.この積分が 1/2 なのは,確率積分を Stratonovich 積分に取ったことに起因することが知ら
れている [20].即ち,デルタ関数の端点積分値は積分定義に依存するのである.この小節で問題と
なるのは,「∗-積分を定義に取った場合,端点積分の値をどう取るべきか?」という問題である.
結論から述べると,∗-積分を定義にとった場合は,任意の整数 n に対して
∫ t
∫ t
1
dt1 . . .
dtn δn+1 (t, t1 , . . . , tn ) =
n
+
1
0
0
となる.この結果の導出は次のようになる.まず,
∫ t
∫ t
∫ t
I(t) =
dt0
dt1 . . .
dtn δn+1 (t0 , t1 , . . . , tn )
0
0
(4.17)
(4.18)
0
を考える.この積分は性質 4.11 により,I(t) = t である.ここで,両辺を微分する.この計算の際
に次の事に留意しよう:∗-積分で定式化した確率過程で現れるデルタ関数は,滑らかな関数の極限
であり,通常の計算規則が使える.この事に留意すると,
∫ t
∫ t
dI
= (n + 1)
dt1 . . .
dtn δn+1 (t, t1 , . . . , tn ) = 1
dt
0
0
(4.19)
が成り立つ.但し,多体デルタ関数は対称であり,t0 ∼tn の任意の順序交換に関して不変であるこ
とを用いた.結果,
∫
∫
t
0
t
dtn δn+1 (t, t1 , . . . , tn ) =
dt1 . . .
0
1
n+1
(4.20)
を得る.
逆に次の仮定が成り立てば性質 (4.17) が成り立つ:
• 通常の計算規則が使える.
• n + 1 体デルタ関数が,t0 ∼tn の任意の順序交換に関して不変.
∗-積分は有色ノイズの極限として定義が行われているため,計算に表れるデルタ関数についてはこ
の両方の仮定が成立する.結果,性質 (4.17) が導出される.
52
4.3.4
伊藤積分への変換公式
次に,∗-積分を伊藤積分に変換する公式を導出しよう.導出には Hänggi の公式 (2.100) を用い
る.今,確率微分方程式 (4.5) を考える.この確率微分方程式について,
δ x̂(t)
= b(x)
ˆ
δ ξ(t)
(4.21)
より,任意の解析関数 f (x) について
⟨
⟩
∫ t
∞
n
∑
1
δ
f
(x̂(t))
′
′
ˆ ∗ f (x̂) > =
d⃗t Kn+1 δn+1 (t, ⃗t )
< ξ(t)
ˆ 1 ) . . . δ ξ(t
ˆ n)
n! 0
δ ξ(t
n=0
⟨
⟩
∞
∑
1 Kn+1 δ n f (x̂(t))
=
ˆ n
n! n + 1
δ ξ(t)
n=0
⟨
(
)⟩
∞
∑
Kn+1
δ n−1
δ x̂(t) ∂f
=
ˆ n−1 δ ξ(t)
ˆ ∂x
(n + 1)! δ ξ(t)
n=0
⟨
(
)⟩
∞
∑
∂f
Kn+1
δ n−1
=
b(x)
ˆ n−1
(n + 1)! δ ξ(t)
∂x
n=0
⟨(
)n ⟩
∞
∑
∂
Kn+1
b(x)
f
=
(n + 1)!
∂x
n=0
(4.22)
⟨
⟩
が成立する.ここで, dL̂n = Kn dt を考えると,
⟨
⟨
⟩
∞
dL̂n+1 ⟨{ ∂ }n ⟩
∑
dL̂ ∗ f =
b
f
(n + 1)!
∂x
n=0
⟩
(4.23)
である.ここで注意すべきことは,右辺ではノイズ dL̂ の期待値と x̂ についての期待値が完全に分
かれていることである.この関係式は任意の解析関数 f (x) について成立するので,伊藤型への変
換公式
{
}n
∂
∞
∑
dL̂n+1
∂
[edL̂b ∂x − 1]
dL̂ ∗ f =
·f
· b
f=
∂
(n + 1)!
∂x
b ∂x
n=0
(4.24)
が導出されたことになる2 .この公式の特別な場合 f (x) = b(x) については,Paola や Falsone 等が
導出している [55, 56].この式はその自然な拡張になっている.
4.3.5
∗-積分と確率的 Liouville 方程式
次に,∗-積分で定義された確率微分方程式 (4.5) についての一般化 Fokker-Planck 方程式を導出
しよう.導出には確率的 Liouville 方程式を経由して行う.確率的 Liouville 方程式は ∗-積を用い
て次のように書ける
]
∂ [˙
∂P(x, t)
=−
x̂(t) ∗ P(x, t)
∂t
∂x
]
∂ [
=−
a(x) + ξˆ ∗ b(x) P(x, t).
∂x
(4.25)
2 Hänggi は端点積分をまともに取り扱うことをせず [54],端点積分が出ないように工夫することで式 (4.23) を導出し
た.
53
但し,P(x, t) = δ(x − x̂(t)), P (x, t) = ⟨P(x, t)⟩ である.この式は,∗-積分を用いた場合は通常の
計算規則が使える事を用いると,デルタ関数が充たす連続の式 (恒等式) として導出される.
.この
確率的 Liouville 方程式を伊藤型に変換し,両辺の期待値を取ると,
[
)n ]
(
∞
∑
∂
Kn
∂P (x, t)
∂
= − a(x) +
P (x, t)
− b(x)
∂t
∂x
n!
∂x
(4.26)
n=1
となる.
ここで,一般化 Fokker-Planck 方程式は確率の連続の式と見なせる事を言及しておこう.確率
流を
[
(
)n ]
∞
∑
∂
Kn+1
Jx (x, t) ≡ a(x) + b(x)
− b(x)
P (x)
(n + 1)!
∂x
n=0
(4.27)
∂P
∂
= − Jx
∂t
∂x
(4.28)
と置くと,
となり,連続の式の形になる.
4.3.6
全微分の期待値の積分表現
次に,全微分の期待値についての表現の説明を行う.今,任意の解析関数 f (x) が与えられたと
する.このとき,
⟨
⟩ ∫
d
∂f
f (x̂) = dx Jx
dt
∂x
が成り立つ.証明は次のように行う
⟩
⟨
d
d
f (x̂(t)) =
⟨f (x̂)⟩
dt
dt
∫
∂P
= dx
(x, t)f (x)
∂t
∫
∂Jx
= − dx
(x, t)f (x)
∂x
∫
df
= dx Jx (x, t).
dx
54
(4.29)
(4.30)
第5章
5.1
非 Gauss 確率過程での揺らぎのエネ
ルギー論
はじめに
4章の ∗-積分の定式化によって,非 Gauss 過程でも通常の計算規則が使える積分が開発された.
これを用いることで,非 Gauss 過程の揺らぎのエネルギー論を論じていこう.
ところで,非 Gauss ノイズに駆動される物理的現象は具体的にはどのような現象であろうか?
Gov 等の実験によって,ATP を赤血球が受け取り,Active Protein が膜を運動させる現象が,非
Gauss ノイズ駆動の Langevin 方程式によって記述できることが報告されている [22, 23].Gov 等
は速度分布が Gaussian から大きくずれる事を発見し,そのずれを測定することで非 Gauss ノイズ
の特徴付け等が行えると主張している [23].この状況を,揺らぎのエネルギー論の枠組みに当て
はめて模式的に示したのが図 5.1 である.この様に熱浴に加えて ATP 浴とも接触する微小熱機関
として問題を捉える事が出来る.また,加振粉体系の1粒子 Brown 運動の研究では,速度分布が
大きく Gaussian からずれる事が報告されており,非 Gauss ノイズに駆動される事が示唆されてい
る [57].この場合も,粉体1粒子は明らかに熱的ではない環境とエネルギー授受を行っている.こ
ういった現象に対して,揺らぎのエネルギー論を論ずることが本研究の目標となる.
さて,素朴に考えて次の様な疑問が湧き上がってくるであろう:
• 非 Gauss 性特有の効果はどういう状況で支配的になるのか?
• 中心極限定理を素朴に適応すると,非 Gauss 効果は長時間挙動を調べる分には効かないよう
に思われる.もし長時間挙動に効くとすれば,何故中心極限定理を素朴に適応できないのか?
• Gauss ノイズでは分散が温度に対応しており,特徴付けるものが非常にわかりやすかった.
非 Gauss ノイズでは何がノイズの特徴づけをしており,どう物理現象に影響を及ぼすか?
本章ではこれらの疑問に答えていく.
ATP
Bath
Thermal
Bath
Microscopic
Heat Engine
図 5.1: 熱浴以外に ATP 浴と接触する微小熱力学系.ここで言う微小熱力学系は Gov 等の研究例
では赤血球である.ATP 通じて環境とのエネルギー授受を行っている.
55
5.2
熱力学第1法則
微小系の熱力学で最も基本的なフォーマリズムは,エネルギー流を仕事・熱に分離することであ
る.仕事は,外部パラメータ1 を通じて行われるエネルギー流であり,熱は,ミクロな自由度を介
して行われたエネルギー流である.
我々は非 Gauss 過程を扱う為,環境は必ずしも熱的なものとは限らない.例えば,ATP 浴が環
境であることも考えられる.即ち,ここで定義された熱は,正確には仕事以外のエネルギー流を指
しており,
「熱」というのは便宜上の呼び名である.逆に,このフォーマリズムは非熱的な環境でも
応用ができる.
5.2.1
仕事・熱の定義 (Underdamped Langevin 方程式)
次に,揺らぐ世界の基礎方程式を定める.即ち,x̂ を粒子の位置,p̂ を粒子の運動量として,
dp̂(t)
γ
∂V
ˆ
= − p̂(t) −
(x̂(t), α) + g(x̂(t), p̂(t)) ∗ ξ,
dt
m
∂x
dx̂(t)
p̂(t)
=
,
dt
m
(5.1)
である.ただし,α は外部パラメータ,γ は摩擦係数,m は粒子の質量,V (x, α) はポテンシャルで
ある.また,ξˆ は平均値が 0 の非 Gauss ノイズである.この節では,乗法的なノイズが現れる場合
g(x, p) ̸=const. でも適応可能な様に一般化した Underdamped Langevin 方程式を採用する.乗法
的なノイズをも含めたのは,有色ノイズの効果が現れる場合にも対応できるようにする為である.
この Underdamped Langevin 方程式 (5.1) に対して,仕事 Ŵ ,熱 Q̂ を次のように定義する
d′ Ŵ =
( γ
)
d′ Q̂ = − p̂ + ξˆ ∗ dx̂.
m
∂V
(x̂(t), α)dα,
∂α
(5.2)
この仕事,熱について,熱力学第1法則
dÊ = d′ Ŵ + d′ Q̂
(5.3)
が成立する.但し,Ê = p̂2 /2m + V (x̂, α) である.
5.2.2
仕事・熱の定義 (Overdamped Langevin 方程式)
次に,もっと時間的に粗い分解能で現象を見た場合の基礎方程式,Overdamped Langevin 方程
式の場合を扱う
∂V
dx̂(t)
=−
(x, α)
γ
dt
∂x
ˆ
+ g(x̂(t)) ∗ ξ(t).
(5.4)
x=x̂(t)
この場合も,乗法的なノイズに駆動される場合を排除せずに扱うものとする.熱を式 (5.2) で定義
すると,熱力学第1法則は
dV̂ = d′ Ŵ + d′ Q̂
となる.
1 例えば,粒子をトラップする光ピンセットの高圧等
56
(5.5)
5.2.3
熱測定の公式
次に,熱を表現を ∗-積分から伊藤積分に変換してみよう.まず,加法的なノイズに駆動される
Underdamped Langevin 方程式の場合 g(x, p) = 1 を考えよう.この時,
d′ Q̂ = −
γ p̂2
p̂
γ p̂2
p̂
(dL̂)2
dt
+
d
L̂
∗
=
−
dt
+
d
L̂
·
+
m2
m
m2
m
2
(5.6)
となる.この式は,実験的に熱を逐次測っていく時に使用可能な公式になっている.
Gauss 過程の
( )2
時の違いは, dL̂ /dt が定数になっていないことである.即ち,非 Gauss 過程の時は n ≥ 3 の高
( )n
次の dL̂ がすべて確率変数のままであり,具体的にジャンプ幅 dL̂ を測定して代入しなければ
ならない事を表している.
加法的なノイズの場合は,熱測定公式は有限項で切れた.しかし,乗法的なノイズの場合はそう
ならない.事実,
γ p̂2
p̂g(x̂, p̂)
dt + dL̂ ∗
2
m
m
( )n+1
(
)n
∞
∑ dL̂
γ p̂2
∂
= − 2 dt +
· g(x, p)
pg(x, p)
m
(n
+
1)!
∂p
n=0
d′ Q̂ = −
(5.7)
x=x̂,p=p̂
であり,有限項で切れない.
Overdamped Langevin 方程式の場合は,加法的な場合でさえも有限項で消えない.非調和ポテ
ンシャルの影響で高次のノイズの影響が表れる.事実,
(
)
dx̂ ˆ
′
d Q̂ = −γ
+ ξ ∗ dˆ
dt
∂V
=
∗ dx̂
∂x
)2
(
∂V
∂V
dt +
g(x̂) ∗ dL̂
= −
∂x
∂x
( )n+1
(
)2
(
)n
∞
dL̂
∑
∂V
∂
∂V = −
dt +
· g(x)
g(x)
∂x
(n + 1)!
∂x
∂x n=0
(5.8)
x=x̂
であり,加法的な場合 g(x) = 1 でも
d′ Q̂ =
(
∂V
−
∂x
)2
dt +
( )n
∞
dL̂
∑
n=1
n!
∂ n V (x) ·
∂xn (5.9)
x=x̂
となる.
5.2.4
分布関数の時間発展
次に Underdamped Langevin 方程式に対して,分布関数の時間発展方程式である,一般化 Kramers
方程式を導出しよう.確率的 Liouvlle 方程式を経由して導出する.確率的な分布関数を
P̂(x, p, t) = δ(x − x̂(t))δ(p − p̂(t))
57
(5.10)
⟨
⟩
で導入する.ここで,P (x, p, t) = P̂(x, p, t) という関係がある.確率的 Liouville 方程式は
[
]
[
]
∂ P̂
∂ dx̂
∂ dp̂
=−
∗ P̂ −
∗ P̂
∂t
∂x dt
∂p dt
)
]
[(
∂
∂V
∂ [p ]
γ
ˆ
P̂ −
+ g(x̂, p̂)ξ ∗ P̂
=−
− p−
∂x m
∂p
m
∂x
である.両辺の期待値を取り,Hänggi の定理を用いると,
[
)n ]
(
) ∑
(
∞
∂P
∂ p
∂
∂V
γ
(−1)n Kn ∂
P
= −
+
p+
g
+
∂t
∂x m ∂p m
∂x
n!
∂p
(5.11)
(5.12)
n=1
を得る.これが一般化 Kramers 方程式である.
Overdamped Langevin 方程式に対しての分布関数の時間発展方程式である一般化 FokkerPlanck 方程式は,同様にして得られる
[
(
) ∑
(
)n ]
∞
∂P
1 ∂ ∂V
(−1)n Kn ∂ g
=
+
P.
(5.13)
∂t
γ ∂x ∂x
n!
∂x γ
n=1
5.2.5
平均熱流の積分表現
次に,Underdamped Langevin 方程式に対して,平均熱流についての積分表現を導出する.そ
の前にまず,確率流を定義する.確率流は
(
)
⟨
⟩
p
γp ∂U
Jx ≡ P, Jp ≡ −
−
P + ξˆ ∗ g P̂ ,
m
m
∂x
(5.14)
で定義される.この確率流は連続の式
∂
∂
∂P
= − Jx −
Jp
∂t
∂x
∂p
を充たす.ここで,E(x, p) = p2 /2m + V (x, α) とおくと,
⟨
⟩ ∫
(
)
∂E
d′ Q̂
∂E
= dxdp
Jx +
Jp
dt
∂x
∂p
(5.15)
(5.16)
が導出される.
Overdamped Langevin 方程式に対して確率流は
Jx ≡ −
⟩
1 ⟨ˆ
1 ∂V
+
ξ ∗ g(x̂)P̂
γ ∂x
γ
(5.17)
∂P
∂
= − Jx
∂t
∂x
(5.18)
で定義される.当然この確率流は
を充たす.この Jx を用いて
⟨
d′ Q̂
dt
⟩
∫
=
dx
∂E
Jx
∂x
(5.19)
が導出される.
これらの表式は直観的な平均熱流の定義に合致している.即ち,この定義が熱流の定義として妥
当であることを示唆している.
58
Poisson 熱浴中の運動
5.3
次に,具体的なセットアップの元,問題を解いていこう.この節では最も単純な非 Gauss 過程
の運動として,2つの Poisson ノイズに駆動される粒子の運動を考える.
5.3.1
モデル
強度が I ,遷移率 λ/2 の白色 Poisson ノイズと,強度が −I ,遷移率 λ/2 の白色 Poisson ノイズ
∑
∑
i Iδ(t − t̂i ) +
i (−I)δ(t − ŝi ) である.但し,t̂i と
を組み合わせたノイズを考える.即ち,ξˆ =
ŝi は Poisson 配置である.これを用いて,次のような Overdamped Langevin 方程式
γ
dx̂
∂V
=−
+ ξˆ
dt
∂x
(5.20)
を考える.簡単のため,弱非調和ポテンシャル
V (x) =
K 2 ϵ 4
x + x
2
4
ˆ に対して
によって運動を制御する状況を考える.但し,dL̂ = ξdt
⟨
⟩ I n λ n が偶数
dL̂n =
0
n が奇数
(5.21)
(5.22)
である.
5.3.2
ATP 授受過程との対応
上記のモデルは,Gov 等が研究していた赤血球の膜運動のモデル [23] をより簡易に扱ったもの
だという解釈ができる.まず,赤血球の膜運動のモデルについて解説しよう.赤血球の膜運動は2
つの揺らぎに起因して引き起こされる:
• 熱揺動力 ξˆT :周囲の溶媒分子が引き起こした揺らぎ.
• Active Protein が引き起こす揺らぎ ξˆA:赤血球の膜に付着した Active Protein が ATP を受
け取った時に赤血球の膜をキックすることで生じる揺らぎ.
文献 [23] では,次のような定式化が行われた.
ξˆT を白色 Gauss ノイズとして見なす.平均値は 0
⟨
⟩
ˆ
ˆ
であり,分散は ξT (t)ξT (s) = 2γkB T δ(t − s) で与えられる.但し,γ は粒子の摩擦係数であり,
T は溶媒の温度である.次に,ξˆA を有色 Poisson ノイズとして見なす.ξˆA は,Nm 個の分子モー
ターが独立に粒子をキックする力の和とする.各粒子は ±f0 の力を ∆τ 時間の間出し続けるとす
る.結果,ξˆA は単位時間遷移率 λ = 1/τ ,相関時間 ∆τ の有色 Poisson ノイズとなる.彼らは粒
子の従う Underdamped Langevin 方程式を次のように仮定した
dv̂
= −γv̂ + ξˆT + ξˆA .
dt
(5.23)
但し,v̂ は粒子の速度である2 .
2 この粒子の速度は,実験的に測定できる量と直接対応が付いているわけではなく,間接的に対応している.膜の高さの
変位の Fourier 成分がここでの速度に対応している,と Gov 等は主張している.詳細は文献 [22, 23] を参照のこと.
59
実験によれば,τ ≫ ∆τ が示されており,白色近似が適用可能であることが示唆されている.こ
の方程式は Underdamped 領域のものだが,時間分解能を落として Overdamped 領域の現象を測
定する.そして,Gauss ノイズの項を落とし,3 ,粒子の非調和ポテンシャルで操作すれば式 (5.20)
となる4 .
5.3.3
平均内部エネルギー
次に定常状態の内部エネルギーを計算し,非 Gauss 性が定常状態でどのように寄与するのか調
べよう.まず,計算の簡略化のため,特徴的な定数で無次元化する
ξˆ
,
x = Xxs , t = τ ts , ξˆ′ =
kxs
√
λ
γ
x2
xs = I
, ts = , ϵ′ = s ϵ.
γk
k
k
(5.24)
ここで,ts は系の緩和時間である.またノイズの分散を 1 にするように xs を選んだ.Poisson ノ
イズの時間を特徴づける量は,Poisson ノイズが平均的に発生するまでの時間間隔 tp = 1/λ であ
る.これらを用いると,方程式 (5.20) は
dX̂
= −X̂ − ϵ′ X̂ 3 + ξˆ′
dτ
(5.25)
となる.但し,dL̂ = ξˆ′ dt とおくと,
⟨(
( ) n −1
2
tp
)n ⟩
ts
dL̂
=
0
n が偶数のとき
(5.26)
n が奇数のとき
である.ここで,非 Gauss 性を表す dL̂ の3次以上の項は,tp /ts によって特徴付けられることに
着目しよう.このことから,tp /ts が非 Gauss 性の寄与を示していることがわかる.
次に無次元化された Langevin 方程式 (5.25) に対し,ϵ′ に関する摂動論を論ずる.この時,∗-解
析では通常の解析計算が可能であるため,摂動計算も通常の方法と変わらず行えることにも注意し
よう.まず,
X̂(τ ) = X̂(0) (τ ) + ϵ′ˆX(1) (τ ) + O(ϵ′2 )
(5.27)
と置く.簡単のため,1次の摂動の範囲で問題を解く.各摂動項が充たす常微分方程式は
dX̂(0)
= −X̂(0) + ξˆ′
dτ
dX̂(1)
3
= −X̂(1) − X̂(0)
dτ
(5.28)
(5.29)
である.定常解に興味があるので,初期条件は解に影響を及ぼさない.簡単のため,初期条件を
X̂(0) = 0 とする.結果,
∫ τ
∫
−(τ −s) ˆ′
X̂(τ ) =
dse
ξ (s) − ϵ
0
τ
dse
0
−(τ −s)
(∫
s
dve
)3
ξ (v)
−(s−v) ˆ′
(5.30)
0
3 今回の計算では問題を簡単にするために Gauss ノイズの項を落としたが,落とさずに計算を遂行することは可能であ
る.実験との対応を一番に考えるのであればそうすればよい.
4 非調和ポテンシャルの効果は実験的にも測定されている.例えば文献 [21] などが挙げられる.
60
を得る.さて,欲しい量は無次元化されたエネルギー Û ′ = (1/2)X̂ 2 + (ϵ′ /4)X̂ 4 の定常状態の期待
値である.⟨. . . ⟩c はキュムラントを表すものとしよう.モーメントとキュムラントの関係式に注目
しよう
⟨
⟩
ξˆ′ (s1 )ξˆ′ (s2 ) =δ2 (s1 , s2 ),
(5.31)
⟨
⟩ ⟨
⟩ ⟨
⟩
⟨
⟩ ⟨
⟩
ξˆ′ (s1 )ξˆ′ (s2 )ξˆ′ (s3 )ξˆ′ (s4 ) = ξˆ′ (s1 )ξˆ′ (s2 )
ξˆ′ (s3 )ξˆ′ (s4 ) + ξˆ′ (s1 )ξˆ′ (s3 )
ξˆ′ (s2 )ξˆ′ (s4 )
c
c
c
⟨
⟩ ⟨
⟩
⟨
⟩ c
′
′
′
′
′
′
′
′
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
+ ξ (s1 )ξ (s4 )
ξ (s2 )ξ (s3 ) + ξ (s1 )ξ (s2 )ξ (s3 )ξ (s4 )
c
c
=δ2 (s1 , s2 )δ2 (s3 , s4 ) + δ2 (s1 , s3 )δ2 (s2 , s4 )
tp
+ δ2 (s1 , s4 )δ2 (s2 , s3 ) + δ4 (s1 , s2 , s3 , s4 ).
ts
c
(5.32)
これを用いると,
⟨
⟩ ∫
X̂ 2 (τ ) =
⟨
⟩
ˆ 2)
ds1 ds2 e−(τ −s1 )−(τ −s2 ) ˆˆξ ′ (s1 )ξ(s
0
∫ τ
− 2ϵ′
ds1 ds2 e−(τ −s1 )−(τ −s2 )
0
∫ s2
×
ds3 ds4 ds5 e−(s2 −s3 )−(s2 −s4 )−(s2 −s5 )
0
⟨
⟩
× ξˆ′ (s1 )ξˆ′ (s3 )ξˆ′ (s4 )ξˆ′ (s5 ) + O(ϵ′2 )
∫ τ
=
ds1 e−2(τ −s1 )
0
∫ τ
′
− 2ϵ
ds1 ds2 e−(τ −s1 )−(τ −s2 )
0
∫ s2
×
ds3 ds4 ds5 e−(s2 −s3 )−(s2 −s4 )−(s2 −s5 )
0
[
]
tp
× 3δ2 (s1 , s3 )δ2 (s4 , s5 ) + δ4 (s1 , s3 , s4 , s5 ) + O(ϵ′2 )
ts
∫ τ
=
ds1 e−2(τ −s1 )
0
∫ τ
∫ s2
− 6ϵ′
ds2
ds1 ds4 e−(τ −s1 )−(τ −s2 )−(s2 −s1 )−2(s2 −s4 )
0
0
( )∫ τ
∫ s2
tp
ds2
ds1 e−(τ −s1 )−(τ −s2 )−3(s2 −s1 ) + O(ϵ′2 )
− 2ϵ′
ts
0
0
1 − e−2τ
=
2 ∫
(
)2
3ϵ′ τ
ds2 e−2(τ −s2 ) 1 − e−2s2
−
2 0
( )∫ τ
(
)
ϵ′ tp
−
ds2 e−2(τ −s2 ) 1 − e−4s2 + O(ϵ′2 )
2 ts
0
1 − e−2τ
3ϵ′ 1 − e−2τ
ϵ′ 1 − e−2τ
=
−
−
+ e−2τ (. . . ) + O(ϵ′2 )
2
2
2
2
2
τ
である.τ → ∞ の極限を取ると,
⟨
X̂ 2
⟩
=
SS
1 3ϵ′
ϵ′
−
−
2
4
4
61
(
tp
ts
)
+ O(ϵ′2 )
(5.33)
(5.34)
(5.35)
⟨ ⟩
となる.但し, Â
⟨
SS
を Â の定常状態での期待値を表す.また,
⟩ ∫
X̂ (τ ) =
4
τ
ds1 ds2 ds3 ds4 e−(τ −s1 )−(τ −s2 )−(τ −s3 )−(τ −s4 )
(
)
tp
× 3δ2 (s1 , s2 )δ2 (s3 , s4 ) + δ4 (s1 , s2 , s3 , s4 ) + O(ϵ′ )
ts
∫
∫ τ
tp τ
−2(τ −s1 )−2(τ −s3 )
ds1 ds3 e
+
ds1 e−4(τ −s1 ) + O(ϵ′ )
=3
ts 0
0
)2
(
3 1 − e−2τ
tp 1 − e−4τ
=
+
+ O(ϵ′ )
4
ts
4
0
である.式 (5.36) について τ → ∞ の極限を取ることで,
( )
⟨ ⟩
3 1 tp
X̂ 4
= +
+ O(ϵ′ )
4 4 ts
SS
を得る.これらを用いると,
⟨
Û
′
⟩
SS
1
3ϵ̃
ϵ′
= −
−
4 16 16
(
tp
ts
)
+ O(ϵ′2 )
(5.36)
(5.37)
(5.38)
を得る.
定常熱流
⟨ (
) (
)⟩
= − (dX̂/dτ ) + ξˆ′ ∗ dˆX̂/dτ
は当然 0 のはずである.
SS
この計算の途中では 4 点デルタ関数の端点積分が現れる.この端点積分を 1/4 にとった時のみ定常
熱流が 0 になる.即ち,
「4点デルタ関数の端点積分値として 1/4 をとるべき」という主張はここ
⟨
⟩
この問題の定常熱流 d′ Q̂′ /dτ
でも裏付けられている.
実際に計算を実行して確認してみよう.分かりやすくするために,4点デルタ関数の端点積分値
ˆ ) の期待値は
として 1/4 を採用した場所に下線を引いた.X̂(τ ) ∗ ξ(τ
∫
τ
⟨
⟩
ˆ ) =
X̂(τ ) ∗ ξ(τ
ds1 e−(τ −s1 ) δ2 (τ, s1 )
0
∫ τ
∫ τ
′
−(τ −s1 )
−ϵ
ds1 e
ds2 ds3 ds4 e−(s1 −s2 )−(s1 −s3 )−(s1 −s4 )
0
0
]
[
tp
× 3δ2 (τ, s2 )δ2 (s3 , s4 ) + δ4 (τ, s2 , s3 , s4 ) + O(ϵ′2 )
ts
1
= + O(ϵ′ )
(5.39)
2
である.よって,式 (5.39) について τ → ∞ の極限を取ることで
⟨
⟩
1
ˆ )
(5.40)
X̂(τ ) ∗ ξ(τ
= + O(ϵ′ )
2
SS
ˆ ) の期待値は
である.また,X̂ 3 (τ ) ∗ ξ(τ
⟨
⟩ ∫ τ
3
ˆ
X̂ (τ ) ∗ ξ(τ ) =
ds1 ds2 ds3 e−(τ −s1 )−(τ −s2 )−(τ −s3 )
0
[
]
tp
× 3δ2 (τ, s1 )δ2 (s2 , s3 ) + δ4 (τ, s1 , s2 , s3 ) + O(ϵ′ )
ts
( )
−2τ
31−e
1 tp
=
+
(5.41)
2
2
4 ts
62
である.よって,式 (5.41) について τ → ∞ の極限を取ることで
( )
⟩
⟨
3 1 tp
3
ˆ
X̂ (τ ) ∗ ξ(τ )
= +
+ O(ϵ′ )
4 4 ts
SS
(5.42)
である.これらを用いると
⟨
⟩
⟨ ⟩
⟨ ⟩
⟨
⟩
⟨
⟩
d′ Q̂′
= − X̂ 2
− 2ϵ′ X̂ 4
+ X̂ ∗ ξˆ
+ ϵ′ X̂ 3 ∗ ξˆ
+ O(ϵ′2 )
dτ
SS
SS
SS
SS
SS
[
( )] [
( )] [ ] [ ′
( )]
ϵ′ tp
2ϵ′ tp
ϵ′ tp
1 3ϵ′
6ϵ′
1
3ϵ
+
−
+
= − +
+ −
+
+
2
4
4 ts
4
4
ts
2
4
4 ts
=0
(5.43)
となる.
物理的解釈
5.3.4
平均内部エネルギーは,無限時間後の定常状態であっても非 Gauss 性の指標である tp /ts に依存
することがわかった.これは,素朴に考えて中心極限定理と矛盾するように見える.これはどうし
てなのだろうか?
まず,結果を吟味してみよう.ts ≫ tp では Gauss ノイズに戻る.逆に tp ∼ ts のときは非 Gauss
性の寄与は十分大きくなることがわかる.
中心極限定理が主張する内容は,長時間平均すればノイズは Gauss ノイズに漸近する,という
ことである.ここで言う「長時間」とはどのくらいの時間を指すのだろうか?Poisson ノイズが
Gauss ノイズに緩和する時間スケールは tp で決まる.例えば,10 回程度 Poisson ノイズが発生す
れば Gauss ノイズに十分緩和するのであれば,10tp 程度が中心極限定理で言うところの「長時間」
ということになる.即ち,ts ≫ tp という状況は,「系が変化する前に,ノイズが Gauss ノイズ
に緩和してしまう」という事を表しており,tp ∼ ts という状況は「ノイズが Gauss ノイズに緩和
する前に,系が変化してしまう」という事を表している.
まとめると,次のように一般化できる.系の緩和時間が,ノイズが Gauss 分布に緩和する時間
より遥かに長い時,ノイズは断熱消去できてしまうため,中心極限定理が適応できる.逆に,系の
緩和時間がノイズの緩和時間と同じ時は,ノイズを断熱消去できないため,中心極限定理を適応で
きない.
また,調和ポテンシャルの場合は非 Gauss 効果は消えることに注目しよう.調和ポテンシャル
の場合は X̂ が ξˆ について線形であり,内部エネルギーが X̂ の2次の量となるため,ノイズの高次
の相関は寄与できない.つまり,非 Gauss 性は方程式の非線形性に誘起されて現れるのである.
5.4
Gauss 熱浴と Poisson 熱浴間の熱伝導
次に,3章で扱った熱伝導のモデルを非 Gauss 過程に拡張してみよう.次のような状況を考え
る.まず Gauss 熱浴と Poisson 熱浴を用意する.両熱浴に羽根車を取りつけ,その間をバネで接続
する.この状況を模式的に描いたものが図 5.2 である.Gauss 過程では分散と温度が一対一対応し
ていたので,このセットアップでも「分散が大きい方から小さい方に熱が流れる」というのが素朴
な考えであろう.しかし,この素朴な考えが誤りであることを以下示していく.
63
Gaussian bath
Poisson bath
vane
vane
図 5.2: Gauss 熱浴と Poisson 熱浴間の熱伝導
5.4.1
モデル
簡単のため,両熱浴で羽根車の摩擦係数 γ は同じとする.羽根車の回転角を x̂1 .x̂2 とする.この
時,羽根車の動きが以下の連立 Underdamped Langevin 方程式に従うと仮定する:
dx̂1
∂V
=−
(x̂1 , x̂2 ) + ξˆ1 ,
dt
∂x1
dx̂2
∂V
γ
=−
(x̂1 , x̂2 ) + ξˆ2 ,
dt
∂x2
γ
(5.44)
(5.45)
但し,V (x1 , x2 ) は両羽根車を繋ぐバネのポテンシャルである.1番目の羽根車は Gauss 熱浴に接
触させているので,ξˆ1 は Gauss ノイズであり,2番目の羽根車は Poisson 熱浴に接触させている
∑
∑
ので,ξˆ2 は Poisson ノイズである.Poisson ノイズが ξˆ2 = i Iδ(t − t̂i ) + i (−I)δ(t − ŝi ) の形だ
と仮定する.但し,t̂i , ŝi は Poisson 配置であり,単位時間当たりの遷移率は λ/2 とする.また,非
Gauss 効果は非調和ポテンシャルに誘起されて現れることが示されたため,ポテンシャルの形を
V (x1 , x2 ) =
k
ϵ
(x1 − x2 )2 + (x1 − x2 )4
2
4
(5.46)
にとる.
Gauss ノイズの統計性は,dL̂1 = ξˆ1 dt,系の温度を T1 とおいた時,
⟨(
)n ⟩ 2γkB T1 dt (n = 2)
dL̂1
=
0
( それ以外 )
で表される.一方,Poisson ノイズの統計性は,dL̂2 = ξˆ2 dt,I =
⟨(
)n ⟩
dL̂2
(
)n
2γkB T2 2 λdt
λ
=
0
√
2γkB T2
λ
(n が偶数 )
(5.47)
とおいた時,
(5.48)
(n が奇数 )
である.T2 は Poisson 熱浴の分散を特徴づけるものであり,Gauss 過程での温度に対応する指標
である.この T2 は現象のスケールが tp = 1/λ より遥かに大きいマクロ現象では,中心極限定理が
適応できる為通常の温度になる.今,純粋な非 Gauss 性の寄与に着目したいので,T1 = T2 の場合
を考える.即ち,分散は同じだが,ノイズが発生する時間スケールが異なる熱浴を2つ用意した場
合を考えるのである.
64
5.4.2
定常熱流
両熱浴間の定常熱流を求めよう.まず,系の特徴的パラメータで無次元化する
ξˆ1
x̂1 = X̂1 xs , x̂2 = X̂2 xs , ξˆ1′ =
,
kxs
√
2kB T
γ
x2
xs =
, ts = , ϵ′ = s ϵ.
k
k
k
ξˆ2
ξˆ2′ =
,
kxs
(5.49)
このとき,無次元化された Langevin 方程式は
dX̂1
= −(X̂1 − X̂2 ) − ϵ′ (X̂1 − X̂2 )3 + ξˆ1′ ,
dτ
dX̂2
= −(X̂2 − X̂1 ) − ϵ′ (X̂2 − X̂1 )3 + ξˆ2′
dτ
となる.また,ノイズの統計性は dL̂′1 = ξˆ1′ dτ ,dL̂′2 = ξˆ2′ dτ とおいたとき,
⟨(
)n ⟩ dτ (n = 2)
dL̂1
=
,
0
( それ以外 )
( ) n −1
⟨(
)n ⟩ tp 2 dτ (n が偶数 )
ts
dL̂2
=
0
(n が奇数 )
(5.50)
(5.51)
(5.52)
(5.53)
となる.ここで,Ẑ = X̂1 − X̂2 と置くと
dẐ
= −2Ẑ − 2ϵ′ Ẑ 3 + ξˆ1′ − ξˆ2′
dτ
となることに注意しよう.求めるべき熱流は,
(
)
d′ Q̂′1
dX̂1 ˆ′
dX̂1
≡ −
+ ξ1 ∗
dτ
dτ
dτ
(
) (
)
= Ẑ + ϵ′ Ẑ 3 ∗ −Ẑ − ϵẐ 3 + ξˆ1′
= −Ẑ 2 − 2ϵ′ Ẑ 4 + Ẑ ∗ ξˆ1′ + ϵ′ Ẑ 3 ∗ ξˆ1′ + O(ϵ′2 )
(5.54)
(5.55)
で与えられ,熱流には Ẑ と ξˆ1′ のみが関与する.
次に,ϵ′ についての摂動論を展開する.即ち,
Ẑ(τ ) = Ẑ(0) (τ ) + ϵ′ Ẑ(1) (τ ) + O(ϵ′2 )
(5.56)
と置く.ϵ′ について1次までの摂動論を行うと,各摂動項は
dẐ(0)
= −2Ẑ(0) + ξˆ1′ − ξˆ2′ ,
dτ
dẐ(1)
3
= −2Ẑ(1) − 2Ẑ(0)
dτ
(5.57)
(5.58)
を充たす.定常状態を知りたいので,初期条件には依存しない.簡単のため,Ẑ(0) = 0 とする.
よって,
∫
τ
Ẑ(τ ) =
(
)
dse−2(τ −s) ξˆ1′ (s) − ξˆ2′ (s)
0
− 2ϵ′
∫
0
τ
dse−2(τ −s)
(∫
s
(
))3
+ O(ϵ′2 )
dve−2(s−v) ξˆ1′ (v) − ξˆ2′ (v)
0
65
(5.59)
である.これを用いて以下計算していく.Ẑ 2 については,
∫ τ
)(
)
(
Ẑ 2 (τ ) =
ds1 ds2 e−2(τ −s1 )−2(τ −s2 ) ξˆ1′ (s1 ) − ξˆ2′ (s1 ) ξˆ1′ (s2 ) − ξˆ2′ (s2 )
0
∫ τ
∫ s1
′
−2(τ −s1 )−2(τ −s2 )
− 4ϵ
ds1 ds2 e
ds3 ds4 ds5 e−2(s1 −s3 )−2(s1 −s4 )−2(s1 −s5 ))
0
0
(
)(
)(
)(
)
× ξˆ1′ (s2 ) − ξˆ2′ (s2 ) ξˆ1′ (s3 ) − ξˆ2′ (s3 ) ξˆ1′ (s4 ) − ξˆ2′ (s4 ) ξˆ1′ (s5 ) − ξˆ2′ (s5 ) + O(ϵ′2 )
(5.60)
であるから,
⟨
∫
⟩
Ẑ (τ ) =2
2
τ
ds1 ds2 e−2(τ −s1 )−2(τ −s2 ) δ2 (s1 , s2 )
∫ τ
∫ s1
′
−2(τ −s1 )−2(τ −s2 )
− 4ϵ
ds1 ds2 e
ds3 ds4 ds5 e−2(s1 −s3 )−2(s1 −s4 )−2(s1 −s5 )
0
0
(
)
tp
× 12δ2 (s2 , s3 )δ2 (s4 , s5 ) + δ4 (s2 , s3 , s4 , s5 ) + O(ϵ′2 )
(5.61)
ts
∫ τ
=2
ds1 e−4(τ −s1 )
0
∫ τ
∫ s1
− 48ϵ′
ds1
ds3 ds4 e−2(τ −s1 )−2(τ −s3 )−2(s1 −s3 )−4(s1 −s4 )
0
0
( )∫ τ
∫ s1
tp
′
− 4ϵ
ds1
ds2 e−2(τ −s1 )−2(τ −s2 )−6(s1 −s2 ) + O(ϵ′2 )
(5.62)
ts
0
0
∫ τ
(
)2
1 − e−4τ
=
− 3ϵ′
ds1 e−4(τ −s1 ) 1 − e−4s1
2
( )∫ τ 0
(
)
ϵ′ tp
ds1 e−4(τ −s1 ) 1 − e−4s1 + O(ϵ′2 )
−
2 ts
0
( )
−4τ
1 − e−4τ
ϵ′ tp 1 − e−4τ
′1 − e
=
− 3ϵ
−
+ e−4τ (. . . ) + O(ϵ′2 )
(5.63)
2
4
2 ts
4
0
となる.τ → ∞ の極限を取ると
⟨ ⟩
Ẑ 2
SS
1 3ϵ′
ϵ′
= −
−
2
4
8
(
tp
ts
)
+ O(ϵ′2 )
である.次に,Ẑ(τ ) の 4 次の期待値を求める
∫ τ
Ẑ 4 (τ ) =
ds1 ds2 ds3 ds4 e−2(τ −s1 )−2(τ −s2 )−2(τ −s3 )−2(τ −s4 )
0
(
)(
)(
)(
)
× ξˆ1′ (s1 ) − ξˆ2′ (s1 ) ξˆ1′ (s2 ) − ξˆ2′ (s2 ) ξˆ1′ (s3 ) − ξˆ2′ (s3 ) ξˆ1′ (s4 ) − ξˆ2′ (s4 )
66
(5.64)
(5.65)
から,
⟨
⟩ ∫
Ẑ (τ ) =
4
τ
ds1 ds2 ds3 ds4 e−2(τ −s1 )−2(τ −s2 )−2(τ −s3 )−2(τ −s4 )
0
⟨
⟩ ⟨
⟩
× [ ξˆ1′ (s1 )ξˆ1′ (s2 )ξˆ1′ (s3 )ξˆ1′ (s4 ) + ξˆ2′ (s1 )ξˆ2′ (s2 )ξˆ2′ (s3 )ξˆ2′ (s4 )
⟨
⟩⟨
⟩
+ 6 ξˆ1′ (s1 )ξˆ1′ (s2 ) ξˆ2′ (s3 )ξˆ2′ (s4 ) ] + O(ϵ′ )
∫ τ
ds1 ds2 ds3 ds4 e−2(τ −s1 )−2(τ −s2 )−2(τ −s3 )−2(τ −s4 )
=
0
(
)
tp
× 12δ2 (s1 , s2 )δ2 (s3 , s4 ) + δ4 (s1 , s2 , s3 , s4 ) + O(ϵ′ )
ts
(∫ τ
)2 ( ) ∫ τ
tp
=12
ds1 e−4(τ −s1 ) +
ds1 e−8(τ −s1 ) + O(ϵ′ )
ts
0
0
( )
)
tp 1 − e−8τ
3(
−4τ 2
+
+ O(ϵ′ )
= 1−e
4
ts
8
であり,τ → ∞ の極限を取って
⟨
Ẑ 4
⟩
=
SS
3 1
+
4 8
(
tp
ts
)
+ O(ϵ′ )
(5.66)
(5.67)
を得る.次に,Ẑ(τ ) とノイズの相関を求めよう.
⟩
⟩ ∫ τ
⟨
⟨
′
ˆ
Ẑ(τ ) ∗ ξ1 (τ ) =
ds1 e−2(τ −s1 ) ξˆ1′ (τ )ξˆ1′ (s1 )
0
∫ τ
∫ s1
−2(τ −s1 )
−2
ds1 e
ds2 ds3 ds4 e−2(s1 −s2 )−2(s1 −s3 )−2(s1 −s4 )
0
0
⟩]
⟩⟨
⟩
⟨
[⟨
× ξˆ1′ (τ )ξˆ1′ (s2 )ξˆ1′ (s3 )ξˆ1′ (s4 ) + 3 ξˆ1′ (τ )ξˆ1′ (s2 ) ξˆ2′ (s3 )ξˆ2′ (s4 ) + O(ϵ′ )
∫ τ
=
ds1 e−2(τ −s1 ) δ2 (τ, s1 )
0
∫ τ
∫ s1
′
−2(τ −s1 )
− 12ϵ
ds1 e
ds2 ds3 ds4 e−2(s1 −s2 )−2(s1 −s3 )−2(s1 −s4 )
0
0
× δ2 (τ, s1 )δ2 (s3 , s4 ) + O(ϵ′ )
1
= + O(ϵ′ )
2
(5.68)
であり,τ → ∞ の極限を取って
⟨
Ẑ ∗ ξˆ1′
⟩
=
SS
1
+ O(ϵ′ )
2
(5.69)
を得る.同様に,
⟨
⟩ ∫
Ẑ 3 (τ ) ∗ ξˆ1′ (τ ) =
τ
ds1 ds2 ds3 e−2(τ −s1 )−2(τ −s2 )−2(τ −s3 )
⟨
⟩
⟨
⟩⟨
⟩
× [ ξˆ1′ (τ )ξˆ1′ (s1 )ξˆ1′ (s2 )ξˆ1′ (s3 ) + 3 ξˆ1′ (τ )ξˆ1′ (s1 ) ξˆ2′ (s2 )ξˆ2′ (s3 ) ] + O(ϵ′ )
∫ τ
=6
ds1 ds2 ds3 e−2(τ −s1 )−2(τ −s2 )−2(τ −s3 ) δ2 (τ, s1 )δ2 (s2 , s3 ) + O(ϵ′ )
0
0
1 − e−4τ
=3
+ O(ϵ′ )
4
(5.70)
67
であり,τ → ∞ の極限を取って
⟨
Ẑ 3 ∗ ξˆ1′
⟩
=
SS
3
+ O(ϵ′ )
4
を得る.これらの結果を代入すると,定常状態の熱流が得られる
⟩
⟨
( )
d′ Q̂′
ϵ′ tp
=−
+ O(ϵ′2 ).
dτ
8 ts
(5.71)
(5.72)
SS
これは 0 ではない.この結果が非自明な点は,分散が同じであるにも関わらず,熱浴間で定常的に
熱流が流れることである.Gauss 過程では分散は温度と等価であり,分散の大小関係だけで熱流の
方向が決まったが,非 Gauss 過程では決まらないということである.
5.4.3
物理的解釈
Gauss 熱浴と Poisson 熱浴をつなげた場合,分散が同じ場合でも熱流が生じることがわかった.
この結果の意味することは,一般に非 Gauss ノイズが現れる時は,熱流の向きを判定する指標と
しての「温度」を導入出来ないということである.これは単に「温度を定義するのに分散を用いる
ことが出来ないだけで,他の指標を持ちだせば温度が出来る可能性がある」いうことを意味するの
ではない.熱が流れる向きを定める変数を,接触させる物質に寄らない形で定義することはできな
いというより強い主張をしている.何故なら,式 (5.72) によれば,熱流が流れるかどうかは,接
触を媒介するバネのポテンシャルの形に陽に依存するからだ.この為,熱流が流れる向きを熱浴固
有のパラメータだけからでは判断できない.マクロ熱力学ではこのような事態は生じなかった.マ
クロ熱力学では,接触を媒介する物質に寄らずに温度だけで熱流の方向が決められたのだ.
では,マクロ熱力学では何故接触を媒介する物質に寄らずに温度という熱浴固有のパラメータだ
けで熱流の向きを判定出来たのだろうか?これは次のように解釈できる.式 (5.72) によれば,熱
流は tp ∼ tp の時に流れ,ts ≫ tp の時は流れない.ts は熱伝導が起こる典型的な時間スケールで
あり,ts ≫ tp とは,熱伝導が起こる時間スケールが,ノイズが発生する時間スケールより遥かに
長い状況である.これは,接触させるプローブが十分マクロな状況であれば実現する仮定である.
即ち,熱力学は接触させるプローブ自体がマクロであるという仮定を置いていることになる.この
仮定はミクロな接触を考える場合は一般に破れうる.即ち,プローブの大きさが一般の揺らぎの
エネルギー論では重要となる.tp ∼ ts とはプローブの緩和時間とノイズの緩和時間が同じ程度の
オーダーということであり,微小な操作をする場合にはプローブの緩和時間を調べる必要がある.
5.5
非 Gauss ノイズの描像
さて,ここまでの議論によって次のような描像が得られる.即ち,非 Gauss ノイズは,ミクロ
なノイズの素過程が見える時間スケールで考えるときに現れると,いうことだ.ノイズの代表的
な素過程とは,着目粒子に溶媒粒子が衝突する過程である.この場合,粒子間衝突が見える時間
スケールで現象を考えると,全てのノイズは非 Gauss ノイズに見えるということだ.では,何故
Gauss ノイズでほとんどの現象が議論できてしまうかというと,マクロ現象ではノイズの発生す
る時間スケールが系の運動の時間スケールに比べて十分小さく,無視できるからだ.しかし,揺ら
ぎのエネルギー論が議論するようなミクロ系の操作を行う場合,一般にはこの仮定は充たされな
い.例えば,ATP に駆動される生物現象を考えよう.この場合のノイズの素過程とは ATP が生物
68
分子に衝突する過程である.この問題の場合,系の緩和の時間スケール ts は溶媒の粘性で決まって
おり,固定されている.それに対し,ノイズの発生する時間スケールは ATP の濃度で決まってい
る.即ち,濃度を変化させることで ATP が生物分子に衝突する時間スケール tp を調節し,tp ∼ ts
となる状況を作り出すことが出来る.また,別の例として気体系を考えることが出来る.気体が壁
を叩く時間間隔は気体の濃度で決まっており,稀薄な気体ではノイズの発生間隔が長くなる.よっ
て,濃度の濃淡によってノイズの素過程の時間スケール tp を調節することが出来る.濃度差があ
る2つの気体間の熱伝導現象を,微小なプローブを用いて議論すれば,節 5.4 の状況が実現する可
能性がある.
69
第6章
⋆-解析と混合積
伊藤積分や,Stratonovich 積分では,ノイズではなく積の取り方で差異を表し,定式化を行った.
それに対して ∗-積分ではノイズを自体を変化させることで定式化を行った.その結果,伊藤積分
や Stratonovich 積分といった概念が無くなり,ある意味 ∗-積分しかないように見える.即ち,揺
らぎのエネルギー論を論ずる事が出来るのは ∗-型確率微分過程しかないように見えてくる.しか
し,∗-積分を一般化した ⋆-積を導入することで伊藤型確率微分過程に対してもエネルギー論を論
じることが出来るようになる.ここではその方法論を述べる.
この章では,∗-積分の一般化として ⋆-積を定義する.特に,積の取り方に着目して定式化を行う.
この方法には以下のようなメリットがある:
• ⋆-積と伊藤積の混合積などが定義出来る.これは後述の伊藤型確率微分方程式のエネルギー
論の定式化には必要となる.
• ⋆-積と伊藤積の本質的違いが,より明示的になる.
• 数値計算の高速化の方法論を提示する.
このようなメリットがあるため最終的には,揺らぎのエネルギー論を論ずる上で最も優れている確
率解析は ⋆-解析であると我々は考えている.
6.1
Stratonovich 積と伊藤積の混合積
まず最初に混合積の概念を説明する.簡単のため,Gauss 過程を考える.非 Gauss 過程は次の
小節で説明する.まず,伊藤積分を伊藤積の和として考える.伊藤積は離散化された状態では
f (x̂) · ξˆ → f (x̂i )ξˆi
(6.1)
で定義される.また,Stratonovich 積は
(
f (x̂) ◦ ξˆ → f
x̂i+1 + x̂i
2
)
ξˆi
(6.2)
で定義される.
ここで,伊藤積と Stratonovich 型の混合積を次のように定義する
(
)
(
)
x̂i+1 + x̂i
ˆ
g(x̂) ◦ f (x̂) · ξ → g
f (x̂i )ξˆi .
2
(6.3)
この様な混合積を考えるメリットを次に示す.
今,伊藤型の確率微分方程式
dx̂
= a(x̂) + b(x̂) · ξˆ
dt
70
(6.4)
を考える.このとき,任意の解析関数 f (x) に対して
df dx̂
df [x̂(t)]
=
◦
dt
dx dt
)
df
df (
=
a(x̂) +
◦ b(x̂) · ξˆ
dx
dx
(6.5)
が成立する.これは,伊藤型の確率微分方程式を考える場合も,Stratonovich 型の混合積を考え
ることで通常の計算規則が使える事を示している.
証明は以下のようにして為される.今,Gauss ノイズの分散を 1 としても一般性を失わない.ま
ず伊藤の公式より,
)
df (
1 d2 f 2
a(x̂) + b(x̂) · ξˆ dt +
b dt
dx
2 dx2
が成立する.ところで,Stratonovich 型から伊藤型への変換公式より,
)
)
df
df (
df (
1 d2 f 2
a(x̂)dt +
◦ b(x̂) · ξˆ dt =
a(x̂) + b(x̂) · ξˆ dt +
b dt
dx
dx
dx
2 dx2
df [x̂(t)] =
(6.6)
(6.7)
が成立する.よって,証明された.
6.2
⋆-積と伊藤積
次に ∗-積と伊藤積を,混合積を考えられるように再定義する.今,ξˆ を非 Gauss ノイズとする.
伊藤-Lévy 分解より,非 Gauss ノイズは Gauss ノイズと Poisson ノイズの組み合わせで表現でき
る.よって,f (x̂) ∗ ξˆ を定義するには,Gauss ノイズとの ∗-積と,Poisson ノイズとの ∗-積を定義
すれば十分である.即ち,一番単純な状況である,Gauss ノイズと一つの Poisson ノイズの組み合
わせの場合のみを考えればすぐさま拡張できる.つまり,
ˆ = ξˆG (t) + ξˆP (t)
ξ(t)
∑
λδ(t − t̂i )
= ξˆG (t) +
(6.8)
i=0
とする.但し,ξˆG (t) は Gauss ノイズであり,ξˆP (t) は Poisson ノイズである.また,t̂i は Poisson
配置,λ は Poisson ノイズの強度である.次に,∗-積分の基本発想である,
「有色ノイズからの極限」
という考えに従って,デルタ関数を ϵ 相関を持つように変化させる.即ち,
0
(t < 0 あるいは ϵ < t)
δϵ (t) =
1/ϵ (0 ≤ t ≤ ϵ)
という ϵ-smoothing を用いたデルタ関数を用意し,
∑
ξˆϵ (t) = ξˆG (t) +
λδϵ (t − t̂i )
(6.9)
(6.10)
i=0
とする.この ϵ-smoothing を書けたノイズに対して,伊藤積,及び ⋆-積を次の様に定義する:
∑
ˆ → f (x̂(t)) · ξˆG (t) +
f (x̂(t)) • ξ(t)
f (x̂(t̂i ))λδϵ (t − t̂i ),
(6.11)
i=0
ˆ → f (x̂(t)) ◦ ξˆG (t) +
f (x̂(t)) ⋆ ξ(t)
∑
f (x̂(t̂))λδϵ (t − t̂i ).
(6.12)
i=0
そして,極限の取る順番は ∆t → +0 の後に ϵ → +0 を取る.ここで次の二つの事を証明する:
71
• (i) ここで定義された伊藤積を用いて定義された確率過程と,以前の伊藤積分で定義された
確率過程は等しい.即ち,x̂(0) = X̂(0) で,
dx̂
ˆ
= a(x̂) + b(x̂) • ξ,
dt
dX̂
= a(X̂) + b(X̂) · ξˆ
dt
(6.13)
(6.14)
のとき,x̂(t) = X̂(t) となる事.
• (ii) ⋆-積 (6.12) によって定義された確率過程と,∗-積分 (4.4) が等しい.即ち,x̂(0) = X̂(0)
で,
dx̂
ˆ
= a(x̂) + b(x̂) ⋆ ξ,
dt
dX̂
= a(X̂) + b(X̂) ∗ ξˆ
dt
(6.15)
(6.16)
のとき,x̂(t) = X̂(t) となる事.
まず,(i) から先に証明する.積分方程式の形に直して,両者の差を取ると,
∫ t [
]
ˆ − b(X̂(s)) · ξ(s)
ˆ
x̂(t) − X̂(t) =
ds a(x̂(s)) − a(X̂(s)) + b(x̂(s)) • ξ(s)
(6.17)
0
である.初めに発生する Poisson ノイズの時刻を t̂i とする.明らかに,t ≤ t̂i では
x̂(t) − X̂(t) = 0
(6.18)
である.ところで,
x̂(ti + ϵ) − X̂(ti + ϵ)
∫ ti +ϵ [
]
ˆ − b(X̂(s)) · ξ(s)
ˆ
=
ds a(x̂(s)) − a(X̂(s)) + b(x̂(s)) • ξ(s)
ti
ti +ϵ
]
[
] λ [∫ ti +ϵ
dsb(x̂(ti )) − b(X̂(ti ))
ds a(x̂(s)) − a(X̂(s)) +
ϵ ti
ti
]
∫ ti +ϵ [
] λ [∫ ti +ϵ
=
ds a(x̂(ti )) − a(X̂(ti )) +
dsb(x̂(ti )) − b(X̂(ti )) + O(ϵ)
ϵ ti
ti
∫
=
=O(ϵ)
(6.19)
である.よって,1回目の Poisson ノイズが発生する間は x̂(t) − X̂(t) → 0 (ϵ → +0) である.同
様の議論を繰り返すことで,任意の時刻について x̂(t) = X̂(t) である.
次に (ii) を証明する.(ii) の証明の前に,⋆-積で定義された確率微分方程式を伊藤型に変換する
公式を導出する.Poisson ノイズが発生する時刻を t̂i とすると,
∫ t̂i +ϵ
[
]
ds a(x̂(s) + λb(x̂(s))δϵ (t − t̂i ))
x̂(t̂i + ϵ) = x̂(t̂i ) +
t̂i
[
]
∞
∑
)
1 dn (
n
ds
b x̂(t̂i ) (s − t̂i ) + O(ϵ)
n! dtn
t̂i
n=0
(
)n
∞
∑
λn+1
∂
= x̂(t̂i ) +
b(x)
b(x)
+ O(ϵ)
(n + 1)!
∂x
λ
= x̂(t̂i ) +
ϵ
∫
t̂i +ϵ
n=0
x=x̂(t)
72
(6.20)
である.但し,任意の関数 f (x) について
d
∂
f (x̂(s)) = b(x̂(ŝ)) f (x)
ds
∂x
dn
f (x̂(s)) =
dsn
(
∂
b(x)
∂x
)n
x=x̂(s)
f (x)
λ
,
ϵ
x=x̂(s)
(6.21)
λn
ϵn
(6.22)
が成立することを用いた.即ち,
∞
∑
λ
∆x̂ =
(n
+
1)!
n=0
(
∂
b(x)
∂x
)n
b(x)
(6.23)
x=x̂(t)
が導かれた.
ˆ = λ が成り立つことに着目しよう.
ここで,Poisson ノイズが発生しているときは dL̂ = ξdt
Poisson ノイズが発生しているとは限らない領域では Stratonovich 型から伊藤型への公式が成立し
ている.Poison ノイズが発生している領域の式 (6.23) と,それ以外の領域で成立する Stratonovich
ˆ を用いて
型から伊藤型への変換公式を総合すると,全域では,dL̂ = ξdt
(
)n
∞
∑
(dL̂)n+1
∂
dx̂ = a(x̂)dt +
• b(x)
b(x)
(6.24)
(n + 1)!
∂x
n=0
x=x̂(t)
が成立する1 .よって,これが ⋆-積から伊藤積に変換する公式である.
ところで,これは ∗-積分によって定義された確率過程を伊藤型の確率過程に変換する公式と同
じである.即ち,⋆-積によって定義された確率過程は,∗-積分によって定義された確率過程と一致
する.
6.3
⋆-積から伊藤積への変換公式
前小節によって導出された方法論を一般に拡張すると,一般の解析関数 f (x) について,⋆-積か
ら伊藤積に変換する公式を導出できる.具体的には
(
)n
∞
∑
∂
(dL̂)n+1
f (x̂(t)) ⋆ dL̂(t) =
• b(x)
f (x)
(n
+
1)!
∂x
n=0
(6.25)
x=x̂(t)
である.
証明を行う.Poisson ノイズが発生していない時は,Stratonovich 積から伊藤積への変換公式が
成立し,それは式 (6.25) と同じである.よって,Poisson ノイズが発生している時だけ証明すれば
1 この式は Gauss 過程での Stratonovich 型から伊藤型へ変換する公式を含み,Poisson が発生している時の公式 (6.23)
も含む.
73
よい.今,時刻 t̂i に強度 I の Poisson ノイズが発生しているとする.この時,
∫ t̂i +ϵ
∫ t̂i +ϵ
f (x̂(s)) ⋆ dL̂(s) =
f (x̂(s))λδϵ (s − t̂i )ds
t̂i
t̂i
∫ t̂i +ϵ ∑
∞
dn
λ(s − t̂i )n
f
(x̂(s))
=
ds
dtn
ϵn!
t̂i
n=0
s=t̂i
{
}n
∞
∑
λn+1
∂
f (x)
=
b(x)
(n
+
1)!
∂x
n=0
x=x̂(t̂i )
(
)n+1
{
}n
∫ t̂i +ϵ ∑
∞
dL̂(s)
∂
=
• b(x)
f (x)
(n + 1)!
∂x
t̂i
n=0
(6.26)
x=x̂(t̂i )
が成り立つ.よって,Poisson ノイズが発生している間も成り立つ.
6.4
⋆-積と伊藤積の混合積
∑
次に,⋆-積と伊藤積の混合積を定義する.今,ξˆG (t) を Gauss ノイズ,ξˆP (t) = i=0 λδ(t − t̂i )
ˆ = ξˆG (t) + ξˆP (t) の時,⋆-積と伊藤積の混合積を
を Poisson ノイズとする.ξ(t)
(
)
(
) ∑
λg(x̂(t))f (x̂(t̂i ))δϵ (t − t̂i )
(6.27)
g(x̂) ⋆ f (x̂) • ξˆ → g(x̂) ◦ f (x̂) • ξˆG +
i=0
で定義する.
この ⋆-積と伊藤積の混合積は次の様な特徴を持つ.
• ⋆-積と伊藤積は交換できる.即ち,
(
)
(
)
g(x̂) ⋆ f (x̂) • ξˆ = f (x̂) • g(x̂) ⋆ ξˆ
(6.28)
• ⋆-積は伊藤積に分解できる.分解公式は確率微分方程式の定義の仕方に応じて代わり,次の
様になる.
– [1] 確率微分方程式が ⋆-型の場合
dx̂
ˆ
= a(x̂) + b(x̂) ⋆ ξ,
dt
次の等式
f (x̂) ⋆ ξˆ =
( )n+1
∞
dL̂
∑
n=0
(
d
• b(x̂)
(n + 1)!
dx
(6.29)
)n
f (x)
(6.30)
x=x̂
が成り立つ.
– [2] 確率微分方程式が伊藤型の場合
dx̂
ˆ
= a(x̂) + b(x̂) • ξ,
dt
次の等式
f (x̂) ⋆ ξˆ =
( )n+1
∞
dL̂
∑
n=0
dn
• (b(x))
f
(x)
(n + 1)!
dxn
が成り立つ.
74
(6.31)
n
(6.32)
x=x̂
式 (6.32) の証明を行う2 .Poisson ノイズが発生していない時は,式 (6.32) は Gauss 過程の伊藤
の公式 (2.52) と同じである.即ち,Poisson ノイズが発生している時のみを議論すれば良い.t̂i を
Poisson ノイズが発生している時刻とする.強度を λ とすると,
∫
∫
t̂i +ϵ
t̂i +ϵ
dL̂(s) ⋆ f (x̂(s)) =
t̂i
∫
dsλf (x̂(s))δϵ (s − t̂i )
t̂i
t̂i +ϵ
=
dsλ
t̂i
f (x̂(s))
ϵ
∞
λ ∑ (s − t̂i )n dn
=
ds
f
(x̂(s))
n
ϵ
n!
ds
t̂i
n=0
s=t̂i
∞
n+1
n
∑
λ
n d
=
(b(x̂))
f (x)
n
(n
+
1)!
dx
n=0
x=x̂(t)
(
)n+1
∫ t̂i +ϵ ∑
∞
dL̂(s)
dn
=
• (b(x)) n f (x)
(n + 1)!
dx
t̂i
∫
t̂i +ϵ
n=0
(6.33)
x=x̂(t)
が成立する.よって証明された.ここで,
d
d
f (x̂(s)) =
f (x)
ds
dx
x=x̂(s)
dn
dn
f
(x̂(s))
=
f
(x)
n
n
ds
dx
λ
b(x̂(t̂i )) ,
ϵ
(b(x̂(t̂i )))n
x=x̂(s)
(6.34)
λn
ϵn
(6.35)
を用いた.
6.5
伊藤型確率過程の chain-rule
混合積を用いると,伊藤型の確率微分方程式
dx̂
= a(x̂) + b(x̂) • ξˆ
dt
(6.36)
について,形式的に
df dx̂
df [x̂(t)]
=
⋆
(6.37)
dt
dx dt
と書くことが出来る.これは形式的に通常の計算規則と一致している.即ち,混合積として ⋆-積
を採用すれば,伊藤型確率微分方程式に対しても chain-rule が形式的に成立することがわかる.
証明を行う.伊藤の公式より,
∞
n
∑
df
(b(x)) dn df [x̂(t)] =
a(x̂)dt +
f
dx
n! dxn i=1
2 それ以外の性質は自明である.
75
( )n
• dL̂
x=x̂(t)
(6.38)
が成り立つ.また,
)
df (
df
⋆ dx̂ =
⋆ a(x̂)dt + b(x̂) • dL̂
dx
dx
)
df
df (
=
a(x̂)dt +
⋆ b(x̂) • dL̂
dx
dx
(
)
df
df
a(x̂)dt + b(x̂) •
⋆ dL̂
=
dx
dx
( )n
∞
d
L̂
n
∑
df
n d df
=
a(x̂)dt + b(x̂) •
• (b(x))
dx
n!
dxn dx
n=0
= df [x̂(t)]
(6.39)
が成り立つ.両辺を dt で割れば式 (6.37) を得る.
6.5.1
伊藤型微分方程式の確率的 Liouville 方程式
確率的 Liouville 方程式を経由して一般化 Fokker-Planck 方程式を導出する方法が,色付きノイ
ズ駆動の確率微分方程式,もしくは ∗-型確率微分方程式に対して取られていた.この方法は混合
積の概念を使うことで伊藤型確率微分方程式に対しても拡張できる.伊藤積と ⋆-積の混合積を用
いると chain-rule が形式的に成立するので,P(x, t) = δ(x − x̂(t)), P (x, t) = ⟨P(x, t)⟩ に対して,
]
∂P(x, t)
∂ [˙
=−
x̂(t) ⋆ P(x, t)
∂t
∂x
]
∂
∂ [ˆ
=−
[a(x)P(x, t)] −
ξ • b(x) ⋆ P(x, t)
∂x
∂x
(6.40)
が成立する.両辺の期待値を取ると,一般化 Fokker-Planck 方程式 (2.86) が導かれる.
6.6
∗-積分の数値解析の手法
∗-積分は,定義 (4.4) 通りに計算を行うと計算量が多くなり,精度も落ちる.しかし,確率過程
としては ∗-積分と等価な ⋆-積の定義を用いてやると計算量が格段に少なくなる.具体的には次の
ように計算する.
Poisson ノイズが発生していない時,即ち Gauss ノイズが発生している時は,Stratonovich 積分
を用いて計算を行う.確率過程全体では,Gauss ノイズが発生している時間のほうが遥かに長いの
で,これだけで計算量は格段に減る.
Poisson ノイズが発生した場合,次のように計算を行う.Poisson ノイズの発生時刻を t とする.
確率微分方程式 (4.5) に対して,
Yϵ (t′ ) = Yϵ (t) +
∫
t′
t
λ
ds g(Yϵ (s))
ϵ
(6.41)
を初期条件 Yϵ (t) = X̂(t) として計算する.これを用いると,
X̂(t + ∆t) = X̂(t) + lim (Yϵ (t + ϵ) − Yϵ (t))
ϵ→0
(6.42)
である.但し,λ はノイズの強度であり,∆t は数値計算の刻み幅である.この式は ∗-積の定義か
ら直ちに導かれる.
76
式 (6.41) は ϵ の値を調節すれば,任意の計算量,計算精度で計算できる.例えば,ϵ = 1/n と
し,尚且つ積分を n ステップ
∫
∑
λ
λ
ds g(Yϵ (s)) =
∆s g(Yi )
ϵ
ϵ
i=1
n
=
=
n
∑
(1/n)
i=1
n
∑
n
nλg(Yi )
λ
g(Yi )
n
(6.43)
λ
g(Yn )
n
(6.44)
i=1
の様に分割しよう.ここで,
Yn+1 = Yn +
を Y1 = X̂(t) の初期条件として計算すると,
X̂(t + ∆t) = X̂(t) + lim (Yn − Y1 )
n→∞
(6.45)
が成立する.この式の計算量は O(n) であり,n を調節することで任意の計算時間で計算を遂行で
きる.
77
第7章
7.1
伊藤型 Langevin 方程式に対するエネ
ルギー論
ノイズの定義
5章で,乗法的ノイズに駆動される過程についてのエネルギー論を議論した.ここでの定式化で
は確率微分方程式は ∗-型のものに限られていた.しかし,一般には ∗-型が物理系の記述に適して
いるとは限らない.∗-積分での定式化の特徴は,ノイズに起因する項の期待値が 0 にならないこと
である.事実,ノイズ ξˆ の期待値が 0 であっても一般には
⟨
⟩
ˆ
f (x̂(t)) ∗ ξ(t)
̸= 0
(7.1)
である.但し,f (x) は任意の関数である.それに対して,伊藤積分で定義した確率過程では,ノ
イズに起因する項の期待値が常に 0 となる.事実,ノイズ ξˆ の期待値が 0 ならば,常に
⟨
⟩
ˆ
f (x̂(t)) · ξ(t)
=0
(7.2)
が成立する.即ち,平均値が 0 でない部分が決定論的項であり,平均値が 0 の部分がノイズ,と見
なすような定式化を行う場合は伊藤型確率過程のほうが向いている.一般に,確率積分は問題に応
じてモデル化する必要があるため伊藤型確率過程に対してもエネルギー論を整備することは必要
となる.そこで,この章では,伊藤型 Langevin 方程式に対して揺らぎのエネルギー論の定式化を
行う.
7.2
仕事・熱の定義
今,伊藤型の Underdamped Langevin 方程式を考える
dp̂(t)
γ
∂V
ˆ
= − p̂(t) −
(x̂(t), α) + g(x̂, p̂) • ξ(t),
dt
m
∂x
p̂(t)
dx̂(t)
=
,
dt
m
(7.3)
(7.4)
但し,x̂ は粒子の位置,p̂ は粒子の運動量,m は粒子の質量,γ は粘性率,V はポテンシャル,α
は外部パラメータである.また,g(x, p) ̸=const. の場合を考えることで,一般の伊藤型乗法的ノイ
ズも含めるようにした.ξˆ は平均値が 0 の非 Gauss ノイズとする.
ここで,仕事・熱を次のように定義する
∂V
dα
∂α
) dx̂
( γ
.
d′ Q̂ = − p̂ + g(x̂, p̂) • ξˆ ⋆
m
dt
d′ Ŵ =
78
(7.5)
(7.6)
⋆-積と伊藤積の混合積を用いれば chain-rule が成立するので,次の熱力学第1法則が成立する
dÊ = d′ Ŵ + d′ Q̂.
(7.7)
但し,Ê = p̂2 /2m + V (x̂, α) である.同様にして,Overdamped Langevin 方程式の場合も定式化
できる.
79
第8章
8.1
8.1.1
まとめ・今後の展望
結果のまとめ
∗-解析
通常の計算規則が非 Gauss 過程でも使用可能な ∗-積分を定式化した.∗-積分から伊藤積分への変
換公式を導出した.∗-積分は有色ノイズからの白色極限を取ることで定義した.n 点デルタ関数の
取り扱い方を明らかにした.これにより,非 Gauss 過程で頻繁に現れる積分計算が可能になった.
8.1.2
非 Gauss 過程の揺らぎのエネルギー論
∗-積分を用いて,非 Gauss 過程での揺らぎのエネルギー論を定式化した.乗法的ノイズであって
も議論が可能な様に定式化した.Poisson ノイズ駆動の粒子の自由運動を議論し,非 Gauss 性が支
配的になる条件を導出した.このモデルは ATP 駆動の生物現象と対応がつくと思われる.Gauss
熱浴と Poisson 熱浴間の熱伝導現象を議論し,等しい分散の熱浴間で熱流が流れる現象を発見し
た.両モデルを通じて,非 Gauss 性が現れるのはノイズが発生する時間スケールが無視できない
場合であることを明らかにした.
8.1.3
⋆-積と伊藤積の混合積
∗-解析を更に一般化し,⋆-積を定義した.また,⋆-積と伊藤積の混合積の概念を導入した.これ
により,伊藤型確率微分方程式に対しても形式的に chain-rule が使用可能になった.
8.1.4
伊藤型確率過程の揺らぎのエネルギー論
⋆-積と伊藤積の混合積を用いて,伊藤型確率過程に対してもエネルギー論を展開することが可能
になった.
8.2
8.2.1
今後の展望
∗-積分の収束性
本研究では ∗-積分の定式化に成功したが,その数値的収束性は議論していない.数値的な収束
性に関する議論を行いたい.
また,ϵ-smoothing の方法は本研究で取ったもの以外にも存在するであろう.本研究では,方形
波型の ϵ-smoothing を採用したが,例えば Gaussian Filter 型の ϵ-smoothing などを考えることも
80
できる.ϵ-smoothing の方法によって数値的な収束性が変化するのか,もし変わるのであればどの
様に変わるのか,に興味がある.
8.2.2
非 Gauss 過程での定常分布
代表的な非 Gauss ノイズである Poisson ノイズの非 Gauss 性の指標は,平均発生時間 tp である.
これが大きい極限を考える.即ち,滅多にノイズが発生しない極限を考える.これは,殆どの時刻
において決定論的なダイナミクスが起こり,ノイズは初期条件をランダムに決めるのに寄与するの
みである.この様な状況下での,近似的な定常分布の導出に興味がある.
8.2.3
Helmholtz 自由エネルギー
揺らぎのエネルギー論で重要な役割を果たす量に,Helmholtz の自由エネルギーがある.Gauss
過程では,Helmloltz 自由エネルギーは準静的過程で取り出せるエネルギーと一致することが知ら
れていた.同様に非 Gauss 過程でも,準静的過程で取り出せるエネルギーとして Helmholtz 自由
エネルギーに興味がある.Gauss 過程と違って,非 Gauss 過程では定常分布を解析的に求めるこ
とができない為,具体的な表式を求めることが難しいが,近似的に成立する表式などを求めること
に興味がある.
また,それが状態量として定義可能なものかどうかにも興味がある.例えば,パラメータが 2 つ
以上ある非平衡一般の系では,過剰エントロピーが状態量として定義できず,経路に依存すること
が知られている [58].同様に,Helmholtz 自由エネルギーが非 Gauss 性によって経路に依存して
しまわないかどうかに興味がある.
8.2.4
熱力学第2法則はあるか?
熱力学を特徴づける法則に,熱力学第2法則がある.非 Gauss 過程の場合,第2法則に当たる
ものが存在するかどうかに興味がある.Gauss 過程の揺らぎのエネルギー論の場合,詳細釣り合い
が第2法則を導出するうえで重要な過程であった.非 Gauss 過程一般では詳細釣り合いは成立し
ない為,全く同じ形で第2法則が存在する保証はなく,事実,
「非 Gauss 系では第2法則は無いの
ではないか?」と考えている人も多い [59].詳細釣り合いが成立しない場合でも Jarzynski 等式が
成立する場合があることは Crooks が報告している [49] ので,Crooks タイプの第2法則などが存
在しないかどうかに興味がある.
8.2.5
微小系の温度
本研究では Gauss 熱浴と Poisson 熱浴間の熱伝導現象を取り扱った.その結果,両者の分散が
同じであっても,一般には熱流が生じうることがわかった.このことは,一般に分散だけでは熱浴
を特徴付けることができないことを示している.では,どのような量を用いて熱浴を特徴付けすれ
ば便利であるのか,に興味がある.
81
8.2.6
Gauss 熱浴と Poisson 熱浴間の熱伝導
ところで,Poisson 熱浴とは,なんであろうか?本研究で示されたのは,非 Gauss ノイズに駆動
される現象とは,ノイズが Gauss ノイズに緩和するまでの時間スケールより短い時間スケールで
支配的になる現象である.逆にいえば,Gauss ノイズに緩和するまでの時間スケールでみればす
べての現象は非 Gauss 的に見えると,いうことでもある.即ち,希薄気体の様な,衝突時間のス
ケールが長い現象では,比較的非 Gauss 性を観測することが可能なのではないか,という予想が
立てられる.
即ち,密度に大きな差がある気体 (=衝突時間スケールの異なる気体) を同じ速度分散に従う様
に2つ用意する.稀薄な気体が衝突する時間スケールでみれば,密度が濃い気体が壁に及ぼす力は
Gauss ノイズに見えるであろう.逆に希薄な気体が壁に及ぼす影響は,Poisson ノイズ的に見える
であろう.さて,両者に羽根車を取り付け,羽根車通しを非線形バネで繋ぐ状況を考えよう.この
状況は節 5.4 の状況と対応がつくことが予想される.即ち,分散が同じ密度が異なる気体間で熱流
が生じうる,ということを示唆している1 .我々は,この問題の答えを探るために,分子動力学シ
ミュレーションを行い,予想の検証を行うことに興味がある.
8.2.7
乗法的ノイズ
本研究では,乗法的ノイズに駆動される場合を含めたエネルギー論の定式化を行った.これは,
一般の有色ノイズの場合を扱いたいためである.例えば,着目粒子が溶媒粒子と同程度のスケール
になる場合は,記憶効果を持つ摩擦と有色ノイズに従うことが知られている [62].
さて,乗法的ノイズに駆動される確率過程はまだ発展途上になる.加法的ノイズに駆動される場
合との最も大きな違いは2つある.1つは,揺動散逸定理がないことである.加法的ノイズの場合
は,ノイズの性質が温度と関連付けられており,ノイズの性質は既知としてしてよかった.しかし,
乗法的ノイズに従う場合の,ノイズの性質はよく知られていない.この問題に対する一つのアプ
ローチに,定常解がカノニカル分布になることを課すことで,ノイズの性質に条件を課そうという
アプローチである [60].我々は乗法的ノイズに課されれるべき条件を理解することに興味がある.
また,もう1つの大きな違いとは,確率積分をどう定義するか,という問題である.加法的ノ
イズの場合は,確率微分方程式の定義としては一意に定まるため,確率積分の問題は表に出てこ
ない2 .しかし乗法的ノイズの場合は,熱力学量を定義する確率積分だけではなく,確率微分方程
式自体の定義が問題となってくる.例えば,Lau 等は,本研究の2章で定義した α-積分 (2.36) を
用いた解析を行っている [60].しかし,一般にどの積分を使うべきかは合意が取れていない.我々
は,本研究で定義した ∗-積がこの問題に対して何かの知見を与えることを期待している.
8.2.8
量子系の揺らぎのエネルギー論
揺らぎのエネルギー論は量子系に拡張されてこなかった.この為,量子効果が効くようなミクロ
スケールについては議論ができなかった.近年,調和振動子系については揺らぎのエネルギー論の
拡張がなされている [61] が,一般の系についてはまだ議論が確立していない.その一つの原因と
して,量子系では非 Gauss 効果が無視できないことが挙げられる.量子効果が効くようなミクロ
1 「熱浴の特徴付けが分散では決められない」ということを主張しているのであり,熱力学第2法則に反するとは考えて
いない.
2 Gauss 過程の揺らぎのエネルギー論で問題となったのは熱力学量を定義する確率積分であって,確率微分方程式を定
義する確率積分ではないことに着目しよう.
82
系では,ノイズの時間スケールと系の時間スケールが分離しない点を含め,量子系のように離散的
にエネルギー授受が行われる場合はノイズが Poisson 的になる為である.この様な問題点を持つ量
子系に対し,∗-積分を拡張することが本質的に重要になるのではないかと我々は期待している.
83
84
謝辞
本研究の遂行・本修士論文の作成にあたり,指導教員である早川尚男先生,共同研究者である沙
川貴大先生には理論全般に関して手厚いご指導をいただきました.ここで深く感謝申し上げます.
お忙しい中時間を割いて,本修士論文を審査してくださる京都大学理学研究科物理学第1教室の
先生方に深謝申し上げます.
本研究の土台となった有色ノイズに駆動される確率過程について,東京工業大学の中尾裕也先生
には有益なコメントを頂きました.心より感謝致しております.また,揺らぎのエネルギー論に関
する基礎的な知識をご指導いただいた沙川貴大先生に深く感謝致していたします.更に,本研究に
ついて建設的なコメントをしてくださった東京大学の佐々真一先生に心より感謝しております.同
学年でありながら,真剣に議論にのってくださった東京大学の根本孝裕君 (佐々研究室),伊藤創祐
君 (佐野研究室) に大変感謝いたします.また,本研究を遂行する上で最適な研究環境を提供して
くださった統計動力学グループの皆さん,基礎物理学研究所の関係者の方々に,深くお礼を申し上
げます.
最後に,私に関わる全ての人々,特に苦楽を共にし励ましあった東京大学・京都大学の友人達,
至らない私を育ててくださった両親に深く感謝の礼をここで述べさせていただきます.
85
参考文献
[1] C. Bustamante, J. Liphardt, and F. Ritort, Phys. Today. 58, No. 7, 43 (2005).
[2] A. Ashkin, Phys. Rev. Lett. 24, 156 (1970).
[3] A. Ashkin, Proc. Natl. Acad. Sci. USA, 94, 4853 (1996).
[4] T. Franosch, M. Grimm, M. Belushkin, F. M. Mor, G. Forri, L. Forró, and S. Jeney, Nature,
478, 85, (2011).
[5] R. Huang, I. Chavez, K. M. Taute, M Lukić, S.Jeney, M. G. Raizen, and Ernst-Ludwig
Florin, Nature. Phys. 7, 576 (2011)
[6] T. Li, S. Kheifets, D. Medellin, and M. G. Raizen, Science. 328, 1673 (2010).
[7] D. J. Evans, E. G. D. Cohen, and G. P. Morriss, Phys. Rev. Lett. 71, 2401 (1993).
[8] J. Kurchan, J. Phys. A. Math. Gen. 31, 3719 (1998).
[9] G. E. Crooks, Phys. Rev. E. 60, 3 (1999).
[10] C. Jarzynski, Phys. Rev. Lett. 78, 14 (1997).
[11] T. Sagawa and M. Ueda, Phys. Rev. Lett. 104, 090602 (2010).
[12] T. Harada and S. I. Sasa, Phys. Rev. Lett. 95, 130602 (2005).
[13] D. Collin, F. Ritort, C. Jarzynski, S. B. Smith, I. Tinoco Jr and C. Bustamante, Nature
437, 231 (2005).
[14] J. Liphardt, S. Dumont, S. B. Smith, I. Tinoco Jr and C. Bustamante, Science. 296, 1832
(2002).
[15] S. Toyabe, T. Okamoto, T. Watanabe-Nakayama, H. Taketani, S. Kudo and E. Muneyuki,
Phys. Rev. Lett. 104, 198103 (2010).
[16] S. Toyabe, T. Sagawa, M. Ueda, E. Muneyuki, and M. Sano, Nature Phys. 6, 988 (2010).
[17] K. Sekimoto, Stochastic Energetics (Springer-Verlag, Berlin, 2010).
[18] K. Sekimoto, Prog. Theor. Phys. Suppl. No.130, 17 (1998).
[19] U. Seifert, Phys. Rev. Lett. 95, 040602 (2005).
[20] C. Gardiner, Stochastic Methods (Springer-Verlag, Berlin, 2009).
86
[21] V. Blickle, T. Speck, L. Helden, U. Seifert, and C. Bechinger, Phys. Rev. Lett. 96, 070603
(2006).
[22] N. Gov, Phys. Rev. Lett. 93, 268104 (2004).
[23] E. Ben-Isaac, Y. K. Park, G. Popescu, F. L. H. Brown, N. S. Gov, and Y. Shokef, Phys.
Rev. Lett. 106, 238103 (2011).
[24] K. Kanazawa, T. Sagawa, and H. Hayakawa, arXiv:1111.5906 (2011)
[25] 杉浦光夫,基礎数学 2 解析入門 (1),東京大学出版会.
[26] K. Itô, Stochastic Processes: Lectures Given at Aarhus University (Springer-Verlag, Berlin,
2004).
[27] E. Wong and M. Zakai, Int. J. Eng. Sci. 3, 213 (1965).
[28] R. Kubo, J. Math. Phys. 4, 2, 174 (1963).
[29] 久保亮五等,現代物理学の基礎 統計物理学,岩波書店.
[30] M. Suzuki, Prog. Theor. Phys. Suppl. No. 69, 160 (1980).
[31] 鈴木増雄,現代物理学業書 統計力学,岩波書店 (2000).
[32] 宮原孝夫,金融工学の基礎1 株価モデルとレヴィ過程,朝倉書店 (2003).
[33] E. A. Novikov, Sov. Phys. JETP. 20, 5, 1290 (1965).
[34] P. Hänggi, Z. Physik. B. 31, 407 (1978).
[35] J. M. Sancho, and M. San Miguel, S. L. Katz, J. D. Gunton, Phys. Rev. A. 26, 3, 1589
(1982).
[36] R. F. Fox, Phys. Rev. A. 33, 1, 467 (1986).
[37] R. F. Fox, Phys. Rev. A. 34, 5, 4525 (1986).
[38] P. Grigolini, Phys. Lett. A. 119, 4, 157 (1986).
[39] P. Grigolini, L. A. Lugiato, R. Mannella, P. V. E. McClintock, M. Merri, and M. Pernigo,
Phys. Rev. A. 38, 4, 1966 (1988).
[40] H. B. Callen, Thermodynamics and an Introduction to Thermostatistics, John Wiley and
Sons (1985).
[41] 佐々真一,熱力学入門,共立出版 (2000).
[42] 田崎晴明,新物理学シリーズ 熱力学 現代的な視点から,培風館 (2000).
[43] 清水明,熱力学の基礎,東京大学出版会 (2007).
[44] U. Seifert, Eur. Phys. J. B. 64, 423 (2008).
87
[45] K. Sekimoto, F. Takagi, and T. Hondou, Phys. Rev. E. 62, 7759 (2000).
[46] H. A. Kramers, Physica 7, 284 (1940).
[47] J. M. Sancho, M. San Miguel, and D. Dürr, J. Stat. Phys. 28, 291 (1982).
[48] K. Sekimoto, J. Phys. Soc. Jpn. 68, 1448 (1999).
[49] G. E. Crooks, J. Stat. Phys. 90, 1481 (1998).
[50] P. Hänggi, Z. Physik. B. 36, 271 (1980).
[51] C. Van Den Broeck, J. Stat. Phys. 31, 467 (1983).
[52] T. Srokowski, Phys. Rev. E. 80, 051113 (2009).
[53] T. Srokowski, Phys. Rev. E. 81, 051110 (2010).
[54] P. Hänggi, private communication (2010).
[55] M. D. Paola and G. Falsone, Tras. ASME, J. Appl. Mech. 60, 141 (1993).
[56] C. Proppe, Int. J. Eng. Sci. 40, 1165 (2002).
[57] A. Kawarada, and H. Hayakawa, J. Phys. Soc. Jpn. 73, 2037 (2004).
[58] T. Sagawa, and H. Hayakawa, Phys. Rev. E. 84, 051110 (2011).
[59] K. Sekimoto, private communication (2011).
[60] A. W. C. Lau and T. C. Lubensky, Phys. Rev. E. 76, 011123 (2007).
[61] J. M. Horowitz, arXiv:1111.7199 (2011).
[62] J. P. Hansen, and I. R. McDonald, Theory of Simple Liquids, Academic Press (2006).
88
© Copyright 2026 Paperzz