ダイハツ工業株式会社
I スマートアシス卜
通称名
ミラ
車両型式
エンジン型式
適用時期
LA300
LA310
KF型 (N/A)
20 日 . 8~
イース
出典資料
新型車解説書 N
O
.
3
修理書 NO
.
3
EK231A
]K231A
1 概要
・一部仕様に,お客様の前方不注意による追突事故やペダル踏み間違いによる事故の防止又は被害軽減をサ
ポートするスマートアシストを設定している 。
・レーザ光を前方に照射しその反射光を検知することで,先行車との車間距離及び相対速度を認識し衝突の
CUを採用し車両前方左側に取り付けている 。
危険性を判断するレーザ・レーダ・センサ E
L
i
q
u
i
d.
C
r
y
s
t
a
l.
D
i
s
p
l
a
y:液晶ディスプレイ)
・システムの作動状態をコンビネーション・メータ内の LCD(
及びマスタ・ウォーニング,スマートアシスト
OFFイ ン ジ ケ ー タ に よ っ て 表 示 す る も の と し 使 用 性 に 優
れたものとした 。
・スマートアシストは以下の機能によって構成されている 。
〈スマートアシスト機能構成〉
機能名称
低速域衝突回避支援
ブレーキ機能
内 容
-緊急ブレーキ機能や警報により,運転者の前方不注意などによる低速での追突事 故防止をサポートす
る。
-ブレーキ制御はレーザ・レーダ・センサ ECUからの信号によって VSC'ECUが行う 。また,緊急プレー
キ作動時にはストップ・ランプを点灯させる 。
-緊急ブレーキが作動したとき,レーザ・レーダ・センサ ECUからの信号によ ってエンジン・コントロー
ル・コンピュータがエンジン出力を抑制する 。
誤発進抑制制御機能
レーザ・レーダ・センサ ECUが認識した障害物の手前で,運転者がアクセル・ペダルを必要以上に強
ブレーキ・ペダルとアクセル・ペダルを踏み間違えた J
とレーザ・レーダ・セン
く踏み込んだ場合に, I
サ ECUが判断し,エンジン出力を抑制することで急発進をゆるやかにする 。またコンビネーション・メー
タのブザー吹鳴とインジケータ /ウォーニングの点滅 /点灯表示により,注意を促す。
先 行車発進お知らせ
機能
停車中,先行車が発進しでも自車が発進しないとレーザ・レーダ・センサ ECUが判断した場合に,コ
ンピネーション・メータのブザーとインジケータの点滅表示をすることで,運転者へ交差点等での先行
車の発進を知らせる 。
J
1) 注意事項
(
1
) 安全運転義務
・運転者には通常の安全運転の責任,義務がある 。運転時は常に先行車との車間距離や,周囲の状況,運転環
境に注意して必要に応じてブレーキ・ペダルを踏むなど,安全運転に努める 0
・スマートアシストに頼った運転は,絶対に行わない 。 システムを過信すると思わぬ事故につながるおそれが
ある 。
・スマートアシストは
運転者の判断を補助し
事故被害の軽減を目的としている 。衝突警報が作動した場合
は前方や周囲を確認の上,運転者の判断でブレーキ・ペダルを踏むなどの適切な操作をする 。
・わき見運転やぼんやり運転など運転者の前方不注意を防止したり
悪天候時の視界不良下での運転を支援し
たりする装置ではない 。
-スマートアシストは
あらゆる状況で衝突を軽減したり
作動したりするものではない 。
円くd
A斗A
・
・
四
置問 E E
(
2
) レーザ・レーダ・センサ ECUの取り扱い
-汚れ検知機能を備えているが,万全ではない 0
.レーザ・レーダ・センサ ECU部周辺にステッカやアクセサリ用品などを取り付けない 。特にセンサ窓部に
はステッカが透明であっても貼り付けない 。誤作動の原因となる 。
・レーザ・レーダ・センサ ECUを清掃するときは,やわらかい布などを使用して傷を付けない様に注意する 。
傷が付いた場合,故障,誤作動の原因となる。
・レーザ・レーダ・センサ ECUや,その周辺部に強い衝撃や力を加えない 。故障,誤作動の原因になる 。
・レーザ・レーダ・センサ ECUにウオツシャ液やオイルが付着した場合は,速やかに拭き取る。故障,誤作
動の原因となる 。
・レーザ・レーダ・センサ ECUに援水剤などを塗らない 。
・レーザ・レーダ・センサ ECU周辺には高圧洗浄機でフkをかけない。故障,誤作動の原因となる 0
.レーザ・レーダ・センサ ECUをのぞきこまない 。
(
3
) 性能限界
・スマートアシストの認識性能・制御性能には限界がある 。低速域衝突回避支援ブレーキ機能,誤発進抑制制
御機能の警告を必ず参照の上,正しく使用する 。誤った使用をすると,適切に制御が行われず,思わぬ事故
につながるおそれがある 。
-以下の状況ではシステムは正しく動作しないため,スマートアシストを“ OFF"にする 。
-タイヤの空気圧が適正でないとき
・スペア・タイヤやタイヤ・チェーンを装着しているとき
-磨耗したタイヤ,磨耗差の激しいタイヤを装着しているとき
.指定サイズ以外のタイヤを装着しているとき
-サスペンションを改造したとき
-事故にあったときや故障したとき
・ブレーキ警告灯が点灯しているとき
-重い荷物を積んで車が傾いているとき
.定員を超えているとき
(
4
) 制御禁止条件
犬況では
-以下の j
レーザ・レーダ・センサ ECUはスマートアシストを作動させない 。
/
h以上のとき
-車速が約 30km
l
O
E
"を出
・レーザ・レーダ・センサ ECUの発光部又は受光部の窓に汚れが付着したとき(機能低下コード "
力)
・ワイパ (LO,HI)が作動しているとき(機能低下コード“ l
l
E
"を出力)
l
l
E
"を出力)
・レーザ・レーダ・センサ ECUの受光部に強い光(西日など)を受けたとき(機能低下コード "
l
E
"を出力)
・悪天候(強い雨,吹雪,濃霧など)のとき(機能低下コード“ l
2
E
"を出力)
・レーザ・レーダ・センサ ECUの温度に異常が発生したとき(機能低下コード“ 1
GON"から“ IGOFF"するまでに二次ブレーキが 3回作動したとき(機能低下コード“ 1
2
E
"を出力)
・
“I
4
E
"を出力)
.舵角センサ補正中のとき(機能低下コード“ 1
-機能検査未実施のとき(機能低下コード "FC"を出力)
-スマートアシスト OFFスイッチや DS-Iにより,スマートアシストを“ OFF"したとき
.ダイアグノーシス・コードが出力されているとき
-3
5-
E. .
薗薗.
(
5
) 不作動
・以下の状況では,スマートアシストが正しく作動しない可能性がある 。 また,スマートアシストの各制御に
よっては以下の状況以外でも正しく作動しない可能性がある 。詳細は各制御の説明を参照。
-悪天候時(強い雨,吹雪,濃霧 など)
・西日などの前方からの強い光をうけたとき
・レーザ・レーダ・センサ E
CU部に雪や汚れ
霜などが付着して覆っているとき
.エンジン始動直後
・荷物の積載などにより,極端に車両が傾いているとき
・前方車などの水, 雪などの巻上げ
・水蒸気,砂,煙など視界が十分でないとき
・キャリア・カーやゴミ収集車などの特殊車両や,形状が壁状でない車両や黒い車両
・網目の大きいフェンス,ガラスなど,光をすり抜けるもの
-汚れなどで,両方のリフレクタが十分見えていない前方車
・前方車がトレーラなど地上高(リフレクタ高さ)が高い車両のとき
.でこぼこ道やオフロードなどの悪路を走行しているとき
-道路標識やポールなどの細い棒状のもの
-車両に非常に近い位置で車両中央からずれた位置に障害物が存在するとき
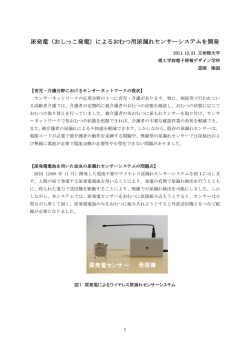
2 構造・機能
1) 構成部品の配置(図 1-1)
ボデー統合 ECU
トランスミッション・
コントロール・コンビュータ
コンビネーション・メータ
舵角センサ
スマートアシスト OFFスイッチ
レーザ・レーダ・センサ
ECU
アクチュヱータ (
V
S
C
)
エンジン・コントロール・
コンビュータ
図 1-1 構成部品の配置
phv
q ︿d
-~司E・E・四・
2
) 構成部品の構造・機能
(
1
) レーザ・レーダ・センサ E
CU(図 Iー 2
)
・レーザ・レーダ・センサ ECUは
レーザ発信器;受光部;発光部;マイクロ・コンピュータなどから構成
されている 。 レーザ発信器から出力されたレーザ光を前方に照射し前方障害物などに反射したレーザ光が
受光部に戻ってくるまでの時間及び入射角度をマイクロ・コンピュータが演算することで
前方の障害物の
有無/障害物との距離/先行車との相対速度などを演算する 。
・レーザ・レーダ・センサ ECUは,各スイッチ,センサ,コンビュータなどの信号により,各制御における
制御要求信号等を各コンピュータへ出力する 。
〈認識範囲〉
[
C
:
>
上下約 6。
前方約 20m
図 1-2 レーザ・レーダ・センサ ECU
(
2
) スマートアシスト
-スマートアシスト
OFFスイッチ(図 1-3
)
OFFスイッチは
インストルメント・
パネル右側に取り付けられている 。
-長押しによる“ O
N"/“OFF"切り替えを採用することに
よか運転者の意図しない誤操作を防止している 。
式
。
e
・
OFF
図 1-3 スマートアシス卜
OFFスイッチ
(
3
) トランスミッション・コントロール・コンビュータ
-助手席ジヤンクション・ブロックの横に取り付けられている 。
・レーザ・レーダ・センサ ECUから CAN通信で制御状態信号を受け取り, e
c
o・IDLE制御の作動可否を判定
i
月
qtu
匪温Z画固・
している 0
・レーザ・レーダ・センサ E
CUへ CAN通信でシフト・ポジション信号を出力する 。
(
4
) エンジン・コントロール・コンビュータ
-インストルメント・パネル下のエアコン・ユニット下部に取り付けられている 。
CUから
・レーザ・レーダ・センサ E
(
5
)
CAN通信で制御要求信号を受け取り
エンジン出力の抑制制御を行う 。
スロットル・ボデー
・エンジン出力の抑制制御において,エンジン・コントロール・コンビュータからの信号に応じてスロットル
開度を制御することにより
エンジン出力を抑制する 。
-スロットル・ポジション・センサによりスロットル・バルブ開度をエンジン・コントロール・コンビュータ
へ出力する 。
(
V
S
C
)
・レーザ・レーダ・センサ E
CUからのブレーキ要求を受けアクチュエータを作動し,ブレーキ制御を行う 。
(
6
) アクチュ工ータ
-内蔵の液圧センサと
両の傾斜を算出し
ストップ・ランプ・スイッチ
ヨー &Gセンサなどからの信号より車両の減速度や車
CUへ出力する 。
レーザ・レーダ・センサ E
(
7
) 舵角センサ
・ステアリングの回転を検:出し
VSC.ECUに出力する。
(
8
) ヨー・レート・センサ
-内蔵のヨー・レート・センサにより鉛直軸方向の回転角速度(ヨー・レート,自転速度)を検出し,
ECUに出力する 。
SC.ECUに出力する
-内蔵の Gセンサにより車両に減速度を検出し, V
・内蔵の Gセンサにより道路の勾配を検出し, V
SC.ECUに出力する 。
VSC.
0
(
9
) リレー(ストップ・ランプ・リレー)
-緊急ブレーキ作動時
VSC.ECUからの指令により駆動し,ストップ・ランプを点灯させる 。
1
(
同 ストップ・ランプ・スイッチ
・ブレーキ・ペダルが踏まれたことを検知し,
V
S
C
.ECUに出力する
0
(
1
1
) コンビネーション・メータ
CUから
・レーザ・レーダ・センサ E
CAN通信で制御要求信号を受け取り,インジケータ /ウォーニングの点
滅 /点灯;ブザー吹鳴を行う 。
同 ボ デ ー 統 合 ECU
-ワイパ・スイッチからの制御解除信号を中継し,コンビネーション・メータを介してレーザ・レーダ・セン
CUに出力する 。
サE
1
(
司 ワイパ・スイッチ
.LO又は H
I位置に操作することにより ボデー統合 ECU,コンビネーション・メータを介してレーザ・レー
CUに制御解除信号を出力する 。
ダ・センサ E
3 制御内容
1)概要
・レーザ・レーダ・センサ E
CUが前方にある車両,障害物等を認識し対象物の位置;速度;進路等からスマー
トアシストの各制御の作動要否を判断する 。作動要と判断した場合,
し各制御を作動させる 。
-3
8-
CAN通信で各 ECUに作動要求を出力
-~II・E・国且
2
)
低速域衝突回避支援ブレーキ機能
(
1
) 概 要 ( 図 1-4
)
-低速域衝突回避支援ブレーキ機能は
以下の制御によ って構成されている 。
〈低速域衝突回避支援ブレーキ機能制御構成〉
制御名
衝突警報
緊急ブ レーキ
停止保持
内
廿
,
.
,
.
.
τ
・
レーザ・レーダ・センサ ECUが前方の状況や CAN通信に よる各 ECUからの入力により,前方障害物と
の衝突の可能性が高いと判断したとき,コンビネーション・メータのブザー吹鳴とインジケータの点滅で
運転者に注意喚起して衝突回避操作を促す。
-衝突警報後も先行車との距離が著しく縮まるなど,衝突の可能性がより高まったとレーザ・レーダ・セ
ンサ ECUが判断したとき,緊急ブレーキの作動とエンジン出力抑制により ,衝突被害を軽減もしくは
衝突を回避する 。
-衝突の可能性が高くなるに従って, 一 次ブレーキ(弱いブレーキ力)から 二 次ブレーキ(強いブレーキ力)
へ移行する 。
-制御中 , コンビネーション・メータのブザー吹鳴とインジケータ /ウォーニングの点滅 /点灯を行う 。
-緊急ブレーキにより自 車が停車 した後,最長約 l
.5秒間ブレーキ力保持をする 。
-制御中,コンビネーション・メータのブザー吹鳴とインジケータ /ウォーニングの点滅 /点灯を行う 。
-低速域衝突回避支援ブレーキ機能は, 主に前方車に作動する 。ただし,二輪車や歩行者,電柱,壁などに対
しても作動することがあるが,これらへの衝突を回避することを目的とはしていない 。
① 衝突警報開始
②緊急ブレーキ開始
③緊急ブレーキ終了
停止保持開始(最長 1
.
5秒)
ブザー吹鳴
スマー卜・アシスト作動
インジケータ
マスタ・ウォーニング・ランプ
ストッフ・.ランプ
ー
-Ila1
li
t-
二次ブレーキ
キ
一度
レ速
ブ減
緊急ブレーキ状態
﹄
図
1-4 低速域衝突回避支援ブレーキ機能
-3
9-
・
・
四
冒開E E
(
2
)
制御遷移図(図 Iー 5
)
制御キャンセル条件を満たしたとき
前方車との
衝突の可能性更に高い
障害物との
衝突の可能性:低い
重量日
j
犬;兄によ っては, 一次ブレーキ, 二次ブレーキから作動することがある 。
図
1-5 制御遷移図
(
3
) システム図(図 Iー 6
)
CAN通信
エンジン出力抑制要求信号
f
1
ブレーキ制御要求信号
」
」
EFト ECU
ストップ・ランプ・リレー
VSC'ECU
!
ストップ・ランプ・スイ ッチ
車速 /加速度信号
-ブレーキ信号
加速度信号
レーザ・レーダ・センサ E C U
車両回転角速度信号
舵角信号
!
ヨー &Gセンサ
舵角センサ
ボデー統合 ECU
-インジケータ駆動
要求信号
-ブザー駆動要求信号
ワイパ・コントロール信号
コンビネーション・メータ
シフト・ポジション信号
スロットル・ボデー
CVT
/eco・IDLE.ECU
図 1-6 システム図
4
0
置温祖国函・
(
4
) 作動条件(図 1-7)
-以下の条件をすべて満たしたとき,作動対象と衝突する可能性が高い場合に低速域衝突回避支援ブレーキ機
能が作動する 。
作動条件
項目
作動対象
自車速
I
Gスイッチ
シフト・ポジション
ステアリング舵角
約 4~ 約 30km /h
I
G“ON"のとき
p,Rレンジ以外
0
0以内
約:t3
ブレーキ
衝突回避操作とレーザ・レーダ・センサ ECUが判断できる踏み込み量 でないとき
ラップ量
自車幅の約 6
0%以上
道路勾配
前方車との距離
軍翌日
主に車両に対して作動
2輪,バイク,歩行者, 壁等 にも作動することがある
約一
10%以上
0m以内
約2
ラ ッ プ量 : 自 車 と 障 害 物 と の 左 右 の 重 な り 量
ラッフ量
図 1-7 ラップ量
(
5
) 性能限界
・低速域衝突回避支援ブレーキ機能を,
日常の車両停止のためには絶対に使用しない 。低速域衝突回避支援ブ
レーキ機能はあらゆる状況で衝突を回避するものではない 。 ブレーキの作動を低速域衝突回避支援ブレーキ
機能に頼っていると,衝突事故を起こす場合がある 。
-衝突警報が作動した場合は前方や周囲を確認の上,運転者の判断でブレーキ・ペダルを踏むなどの適切な操
作をする 。
-安全のため,お客様による低速域衝突回避支援ブレーキ機能の作動テストは行わない 。止まりきれないこと
や作動しないことがあり,思わぬ事故につながるおそれがある 。
-低速域衝突回避支援ブレーキ機能は,主に前方車に作動する。ただし二輪車や歩行者,電柱,壁などに対
しても,作動することがある 。
-低速域衝突回避支援ブレーキ機能は,衝突が避けられないと判断した段階で作動し衝突直前で強いブレー
キをかけるように設定しているので,その効果は様々な条件により変わる 。そのため,常に同じ性能が発揮
できるものではない。
-緊急ブレーキが作動したとき,アクセル操作をしても,緊急ブレーキを継続する 。た だ し ア ク セ ル を 全 開
に踏みこむと緊急ブレーキを解除する 。
-運転者がブレーキ・ペダルを踏んでいたり,ハンドルを操作していたりすると,その操作状態によっては運
転者の回避操作として判断され,緊急ブレーキが作動しない場合がある 。
-車速が約 30km/
h以内であっても,前方車との速度差が約 20km/hを超える場合,スマートアシストの性能
限界から衝突を回避することはできない 。
-シート・ベルトを着用し,必ず同乗者にも着用させる 。 シート・ベルトを正しく着用しないと,緊急ブレー
キが作動したときに危険な場合がある 。
市EA
Aせ
-~・E・四・
(
6
) 不作動
・スマートアシストの不作動状況に加え,以下の状況では,低速域衝突回避支援ブレーキ機能の作動条件を満
たしていても止まりきれないことや
作動しない可能性がある 。
-前方車との速度差,車間距離,接近の状態,横方向のずれ具合(オフセット 量)
・車両の状態(積載量,乗員など)
・路面の状態(勾配,滑りやすな形状,凸凹など)
・運転者の操作状態(アクセル,ブレーキ,ハンドルなど)
-車両の整備状態(ブレーキ関係, タイヤの磨耗,空気圧,スペア・タイヤなど)
・車両や二輪車などの急な割込み,歩行者の飛び出し
-対向車が自車に向かつて接近したとき
-外気温が低いときや走行開始直後などでブレーキが冷えているとき
-下り坂などでブレーキが過熱してブレーキの効きが悪くなっているとき
-水溜り走行後や洗車後などブレーキが濡れてブレーキの効きが悪くなっているとき
.レーザ・レーダ・センサ ECUの認識状態(特に以下のような場合)
-悪天候時(強い雨,吹雪,濃霧など)
-西日などの前方からの強い光を受けたとき
・レーザ・レーダ・センサ ECU部に雪や汚れ,霜などが付着して覆っているとき
.エンジン始動直後
・荷物の積載などにより,極端に車両が傾いているとき
・前方車などの水, 雪 などの巻上げ
・水蒸気,砂,煙など視界が十分でないとき
・キャリア・カーやゴミ収集車などの特殊車両や,形状が壁状でない車両や黒い車両
・網目の大きいフェンス,ガラスなど,光をすり抜けるもの
-汚れなどで,両方のリフレクタが十分見えていない前方車
-前方車がトレーラなど地上高(リフレクタ高さ)が高い車両のとき
.でこぼこ道やオフ・ロードなどの悪路を走行しているとき
-道路標識やポールなどの細い棒状のもの
-車両に非常に近い位置で車両中央からずれた位置に障害物が存在するとき
・前方車が急ハンドル,急加速急減速したとき
-自車が車線変更して前方車のすぐ後ろに接近したとき
・急なカーブ,急な上り坂,急、な下り坂の場合
-レーザ・レーダ・センサ ECUの認識エリア外に障害物が存在するとき
.前方車両に非常に小さい速度差で接近するとき
-前方車両や二輪車などが横や斜めを向いているとき
-非常に大きなリフレクタのついた,停止している大型車両
.非常に大きなリフレクタの隣に車両が停止しているとき
(
7
)
不要作動
・以下の状況で,運転者の意図に反して低速域衝突回避支援ブレーキ機能が作動する可能性がある。
-牽引されるとき
・キャリア・カーに積載するとき
A
4
︼
わ
つ
電温D1凶・
-シャシ・ダイナモ・メータやフリー・ローラなどを使用するとき
・リフト・アップし
エンジンをかけタイヤを空転させたいとき
-草むらや茂みなどに触れながら通過するとき
-サーキットなどでスポーツ走行するとき
.ETCゲートなどを通過するとき
-前方車に接近して走行するときや,前方車ぎりぎりに接近して停止するとき
.路面の勾配が急に変化する場所を走行するとき
-水蒸気や霧,煙のかたまりを通過するとき
-ビニール・カーテン,旗などをもぐって通過するとき
・前方車などの水, 雪 などの巻上げ
・停止車両などの横すれすれを通過するときや対向車が自車に向かつて接近するとき
.車両用エレベータや機械式駐車場を利用するとき
-路面上に大きな反射物がある場合
・カーブの入口に路側物があるとき
・カーブですれ違う対向車両があるとき
(
8
) 制御キャンセル条件
-低速域衝突回避支援ブレーキ機能が作動中,以下の条件で制御をキャンセルする 。
-ステアリング操作をしたとき 。
-アクセル・ペダルを全開まで踏み込んだ、とき 。
(
9
) 衝突警報
・レーザ・レーダ・センサ ECUが前方車との衝突の可能性が高いと判断したとき,コンビネーション・メー
タへ CAN通信による制御要求信号を出力し,
コンビネーション・メータによるブザー 警報 と,スマートア
シスト作動インジケータを点滅させる 。
〈衝突警報中のメータ作動〉
。
ブザー 音
スマートアシスト作動インジケータ
マスタ・ウォーニング・ランプ
ビビビ ツ
点滅
消灯
0
) 緊急ブレーキ
-衝突警報後も前方車との距離が著しく縮まるなど,衝突の可能性がより高まったとレーザ・レーダ・センサ
ECUが判断すると
レーザ・レーダ・センサ ECUから VSC'ECUへ CAN通信による制御要求信号を出力し,
緊急ブレーキを作動させる 。
-衝突の可能性が高くなるに従って,一次ブレーキ(弱いブレーキ力)から 二次ブ レーキ(強いブレーキ力)へ移
行する 。
-緊急ブレーキ中, VSC'ECUがストップ・ランプ・リレーを駆動し,ストップ・ランプを点灯する 。
-緊急ブレーキ中,コンビネーション・メータのブザー吹鳴とインジケータ /ウォーニングの点滅 /点灯を行う
・緊急ブレーキは,
レーザ・レーダ・センサ ECUが前方障害物を前方車と認識した場合のみ作動する 。
〈緊急ブレーキ中のメータ作動〉
ブザー音
スマートアシスト作動インジケータ
マスタ・ウォーニング
ピピピピピ…
点滅
点灯
0
丹、
u
Aせ
・
富岡 E E・四邑
(
1
1
) 停止保持
-緊急ブレーキにより自車が停車した後
レーザ・レーダ・センサ ECUから VSC'ECUへCAN通信による
制御要求信号を出力し最長約l.5秒間ブレーキ力保持をする 。
-停止保持中,コンビネーション・メータのブザー吹鳴とインジケータ /ウォーニングの点滅 /点灯を行う
0
・停止保持中,アクセル・ペダルを踏み込むと,停止保持はキャンセルされる 。
〈停止保持中のメータ作動〉
ブザー音
スマートアシスト作動インジケータ
マスタ・ウォーニング
ピピピッ・・
点滅
消灯
3
) 誤発進抑制制御機能
(
1
) 概 要 ( 図 1-8
)
・レーザ・レーダ・センサ ECUが認識した障害物の手前で,運転者がアクセル・ペダルを強く踏み込んで車
両を前進させた場合に,
I
ブレーキ・ペダルとアクセル・ペダルを踏み間違えた」とレーザ・レーダ・センサ
ECUが 判 断 し ブ ザ ー 警報 とインジケータを駆動させると共にエンジン出力を抑制することで急発進を抑
制する 。
エンジン出力
「誤発進抑制制御機能非作動時
血
エンジン出力
I
/日ーし…………一一一………ー・日
,-踏み間違え判定
I I,,;,,;';//
「誤発進抑制制御機能作動時
│--aL/F
ブザー吹鳴
岡昭島
スマートアシスト作動
インジケータ
│
l
も│繭 i
i
____1
_
_
.
_
_
l
o
.
T
降 車盗
マスタ・ウォーニング・
ランフ
可F
ι
且且
」
E
制 御 時 間 最 大 約 8秒
図
I-8
誤発進抑制制御機能の概要
1
-i
時間
A
A4A
A斗
・
・
四
置問E E
(
2
) システム図(図 1-9
)
エンジン出力抑制要求信号
スロットル制御
EF卜 ECU
レーザ・レーダ・センサ E C U
-車速/加速度信号
.ブレーキ信号
スロットル・ボデー
VSC.ECU
舵角信号
ストップ・ランプ-スイッチ
舵角センサ
│マスタ
-インジケータ駆動
要求信号
-ブザー駆動要求信号
ウォーニングランプ│
│スマートアシスト作動インジケータ│
L
lN通信
・
・
・
・
・
・
司
←
_
_
_
_
_
.
1
1
.
.
.
.
.
.
ワイ/'¥・
│スマートアシス卜 O町 ン ジ ケ ー タ │ コントロール信号
庄司
-ワイ/'¥・コントロール{言号
.ターン信号
コンビネーション・メータ
シフト・ポジション信号
ワイパ・スイッチ
CVT/eco・I
D
L
E
.ECU
図 1-9 システム図
(
3
) 作動条件
・以下の条件をすべて満たしたとき, 誤発進抑制制御機能が作動する 。
条
項目
作動対象
自車前方約 4m以内に存在するもの
自車速
/
h以下
約 10km
エンジン
エンジン回転中
シフト・ポジション
TRC. VSC
件
P
.,
R N レンジ以外
“O
N"のとき
ブレーキ・ペダル
踏んでいないとき
アクセル・ペダル
踏み込み量 約 80%以 上 か つ 速 い 踏 み 込 み 速 度
(自車速約 4km
/h以下でゆ っ くり約 70%以上踏み込んだ場合,ブザー吹鳴とスマートア
シスト作動インジケータ点滅のみ作動)
ステアリング舵角
0。以内
約:t9
ターン信号
道路勾配
入力なし
約:t5%以内
(
4
) 性能限界
・誤発進抑制制御機能を過信しない 。誤発進抑制制御機能は衝突を回避するものではない 。発進時はシフト・
田
じ
.
、
レバーやペダルの位置及び周囲の安全を充分に確認して操作する 。誤発進抑制制御機能に頼っていると, ,
わぬ事故につながるおそれがある 。
-誤発進抑制制御機能は停止状態を保つものではない 。
-誤発進抑制制御機能はあらゆる状況で発進を緩やかにするものではない 。 また,衝突を回避するものではな
し
五
。
-誤発進抑制制御機能は前方に障害物を認識している場合に作動するものであり, 崖など対象物が見えない状
況で発進を緩やかにするものではない 。
-故意に対象物の近くでアクセル・ペダルを過剰に踏み込まない 。アクセルの調節を誤発進抑制制御機能に頼っ
4
5
-~・E・四・
ていると衝突事故を起こす場合がある 。
-万一, 自車が踏み切り内で閉じ込められた場合,
レーザ・レーダ・センサ ECUが遮断機を対象物と認識し
誤発進抑制制御機能が作動することがある。遮断機を押しのけて進む場合は,慌てずにアクセル・ペダルを
踏み続けるか,スマートアシストを“ OFF"にする。
-運転者がハンドル操作をしていると,その操作状態によっては運転者の回避操作として判断され,誤発進抑
制制御機能が作動しない場合がある 。
.TRCを
“ OFF"又は VSC&TRCを
“ OFF"にした場合,誤発進抑制制御機能は作動しない 。
・エンジン出力の抑制制御をしたときに,アクセル・ペダルを約 8秒以上踏み続けると,作動を解除する 。また,
すばやく 3回以上全開まで踏みなおすと
誤発進抑制制御機能は作動しない。
(
5
) 不作動
・スマートアシストの不作動状況に加え,以下の状況では,誤発進抑制制御機能の作動条件を満たしていても
正しく作動しない可能性がある 。
-前方車との速度差,車間距離,接近の状態,横方向のずれ具合(オフセット量)
・車両の状態(積載量,乗員など)
・路面の状態(勾配,凸凹など)
・運転者の操作状態(アクセル,ブレーキ,ハンドルなど)
-車両の整備状態(ブレーキ関係,
タイヤの磨耗,空気圧,スペア・タイヤなど)
・車両や二輪車などの急な割込み,歩行者の飛び出し
・レーザ・レーダ・センサ ECUの認識状態(特に以下のような場合)
-悪天候時(強い雨,吹雪,濃霧など)
・西日などの前方からの強い光を受けたとき
・レーザ・レーダ・センサ ECU部に雪や汚れ,霜などが付着して覆っているとき
.エンジン始動直後
・荷物の積載などにより
極端に車両が傾いているとき
・前方車なと守の水, 雪 などの巻上げ
・水蒸気,砂,煙など視界が十分でないとき
-網目の大きいフェンス
ガラスなど光をすり抜けるもの
・でこぼこ道やオフ・ロードなどの悪路を走行しているとき
.道路標識やポールなどの細い棒状のもの
-車両に非常に近い位置で車両中央からずれた位置に障害物が存在するとき
.自車が進路変更して障害物のすぐ後ろに接近したとき
-急、なカーブ,急、な上り坂,急、な下り坂の場合
・レーザ・レーダ・センサ ECUの認識エリア外に障害物が存在するとき
.障害物の高さが低いとき(縁石など)
-障害物が小さいとき(小動物,幼児など)
・障害物に接近しすぎたとき
(
6
) 不要作動
・以下の状況で,運転者の意図に反して誤発進抑制制御機能が作動する可能性がある。
-牽引されるとき
・キャリア・カーに積載するとき
-4
6-
笹沼D1園'
-シャシ・ダイナモ・メータやフリー・ローラなどを使用するとき
・リフト・アップし
エンジンをかけタイヤを空転させたいとき
-草むらや茂みなどに触れながら通過するとき
-サーキットなどでスポーツ走行するとき
-脱輪したときやぬかるみから脱出するとき
-前方車に接近して走行するときや,前方車や壁ぎりぎりに接近して停止するとき
.路面の勾配が急に変化する場所を走行するとき
-水蒸気や霧,煙のかたまりを通過するとき
-ビニール・カーテン,旗などをもぐって通過するとき
・前方車なとマの水,雪などの巻上げ
・停止車両などの横すれすれを通過するときや対向車が自車に向かつて接近するとき
.車両用エレベータや機械式駐車場を利用するとき
-路面上に大きな反射物がある場合
・カーブの入口に路側物があるとき
・カーブですれ違う対向車両があるとき
.カーブや交差点に障害物があるとき
-縦列駐車から本線に合流するとき
(
7
) 制御キャンセル条件
-誤発進抑制制御機能中,以下のいずれかの条件で制御をキャンセルする 。
・アクセル・ペダルを約 8秒以上踏みつづけたとき 。
-アクセル・ペダルを踏んだ状態、で
ブレーキ・ペダルを踏んだ、とき 。
・エンジン出力を抑制してからアクセル・ペダルをすばやく 3回以上全開まで踏み直すと
誤発進抑制制御
機能は作動しない。
(
8
) 制御内容
・レーザ・レーダ・センサ ECUから EFI.ECUへ CAN通信による制御要求信号を出力し,スロットル開度を
抑制することでエンジン出力を制限する 。
・スロットル開度を抑制しているとき
レーザ・レーダ・センサ ECUからコンビネーション・メータへ CAN
通信による制御要求信号を出力し,コンビネーション・メータによるブザー吹鳴と,スマートアシスト作動
インジケータ及びマスタ・ウォーニング・ランプを点滅 /点灯させる 。
〈誤発進抑制制御機能作動中のメータ作動〉
ブザー音
スマートアシスト作動インジケータ
マスタ・ウォーニング・ランプ
ピピピピピ…
点滅
点灯
i
司
A吐
置温留置函・
4
) 先行車発進お知らせ機能
(
1
) 概
要(図 1-10)
-停車時に,
レーザ・レーダ・センサ ECUが先行車の発進後約 3m以上前進しでも自車が発進していないと
判定した場合に, コンビネーション・メータのブザーとインジケータの点滅表示をすることで, 運転者へ交
差点 などでの先行車の発進を知らせる 。
..]1悶~
ブザー吹鳴
スマートアシス卜作動
インジケータ
図 I-10 先行車発進お知らせ機能の概要
(
2
) システム図(図 1-11
)
CAN通信
「・ ・
R
VSC'ECU
レーザ・レーダ・センサ E C U
-車速/加速度信号
・ブレーキ信号
ストップ・ランプ・スイッチ
'
加速度信号:
ヨー &Gセンサ
│マスタ
-インジケータ駆動
要求信号
-ブザー駆動要求信号
ウォーニング・ランフ。│
ボデー統合 ECU
│スマートアシス卜作動インジケータ│
│スマートアシスト O町 ン ジ ケ ー タ │
巨日
-ワイ/'¥.
コントロール信号
コンビネーション・メータ
シフト・ポジション信号
-
-
a-Ea'L
-aa'ess
・
CVT
/eco・IDLE・ECU
•
図 I-1
1 システム図
4
8
ワイパ・スイッチ
匪温祖国函・
(
3
) 作動条件
・以下の条件をすべて満たしたとき,先行車発進お知らせ機能が作動する 。
作動条件
項目
作動対象
前方約 10m以内の先行車
作動対象の移動
停車状態から約 3m以上前方へ移動
自車速
約 Okm
/
h
シフト・ポジション
P
. Rレンジ以外
踏んでいる
ブレーキ・ペダル
(
Nのときは除く)
(
4
) 性能限界
・先行車発進お知らせ機能は,安全に発進できる状態を知らせたり,あらゆる状況での先行車の発進を知らせ
たりするものではない 。先行車発進お知らせ機能に頼らず,十分に安全を確認して運転する 。
(
5
) 不作動/不要作動
-スマートアシストの不作動状況に加え,以下の状況では,先行車発進お知らせ機能の作動条件を満たしてい
なくても機能が働いてしまう場合や,発進していても作動が遅れたり,機能が働かない可能性がある 。
-停止した先行車との聞にオートバイなどが割り込んで来たとき 。
-天候や道路形状などにより先行車を認識出来ないとき
-先行車を見失ったとき
-先行車との横位置がずれていた場合(ラップ量)
.自車が停止した時に先行車が動いているとき
-先行車が急、発進や急旋回したとき
-先行車がキャリア・カーやゴミ収集車などの特殊車両や,形状が壁状でない車両や黒い車両のとき
・汚れなどで,先行車の両方のリフレクタが十分見えていないとき
-先行車が大型車など地上高が高く,
リフレクタの取り付け位置が高いとき
・でこぼこ道やオフ・ロードなどの悪路を走行しているとき
5
)
スマートアシスト
OFF機能
-スマートアシスト “
ON"時にスマー トアシスト OFFスイ ッチを約 2秒以上長押しすることにより,スマート
アシストの全制御を“ OFF にすることができる 。
・スマートアシスト OFF機能は,“ I
GOFF でキャンセルされる 。
6
)
スマートアシスト常時 O
FF機能
・スマートアシストの全機能を常時“ OFF"にするスマートアシスト常時 OFF機能を設定した。
-スマートアシスト常時 OFF機能が作動すると, I
Gスイッチを操作しでもスマートアシストの全機能が
“
OFF"のまま復帰しない。
・ブレーキ・ペダルを踏みながら,スマートアシスト OFFスイッチを約 1
0秒以上長押しするか, DS-I
Iのカ
スタマイズでスマートアシスト常時 OFF機能を作動させることができる 。
・スマートアシスト常時 OFF機能が作動中にスマートアシスト OFFスイッチを約 2秒以上長押しするか,DS
I
Iのカスタマイズでスマートアシスト常時 OFF機能から復帰することができる 。
7
) 機能低下,システム異常表示
-機能低下が発生した場合には,状態に応じてコンビネーション・メータの LCDに機能低下コードと,
Iレー
ダー停止」の文字列表示を行う 。
-システムの故障(レーザ・レーダ・センサ E
CUがダイアグノーシス・コード検出)が発生した場合にはスマー
-4
9-
置温祖国首.
トアシスト
OFFインジケータ,マスタ・ウォーニング・ランプを点灯させ, LCDに「レーダー故障」の文字
列表示を行う 。
-機能低下コード
システム異常が検出されているときは,フェイルセーフ制御により,システムが作動しな
し'
0
-制御中に機能低下もしくはシステムの故障が発生した場合は,スマートアシストをキャンセルする 。
〈機能低下コード一覧〉
状態
機能低下
コード
内容
l
OE
キ
llE*
機能低下時
12E
14E
OFFインジケータ
スマートアシスト
マスタ・ウォ一一
ング・ランプ
レーザ・レーダ・センサ ECU
の発光部又は受光部の窓に汚
れが付着 した場合
消灯
消灯
-ワイ パ (LO, HI)
作動時,
又はレーザ・レーダ・セン
サ ECUの 受 光 部 に 強 い 光
(西日など)を受けた場合
-悪天候(強い雨,吹雪,濃
霧など)の場合
消灯
消灯
- レ ー ザ ・ レ ー ダ ・センサ
ECUの 温 度 に 異 常 が 発 生
した場合
“ IGON"から“ I
GOFF"す
るまでに二次ブレーキが 3
回作動した場合
消灯
消灯
消灯
消灯
点灯
点灯
LCD表示
-機能低下コード
.Iレーダー停止」
舵角センサ補正中の場合
故障(ダイアグノーシ
ス・コード検出)時
「レーダー故障」
/
h以上になるとメータ表示消灯,その後約 35km/
h以下になるとメータ表示点灯
*:自車速約 45km
4 点検・整備のポイント
1) ダイアグノーシス・コードの確認,記録,消去
ダイアグノーシスの異常コードが表示されている場合,そのシステムの不具合が過去に発生したものなのか,
現在も継続しているものなのかを確認し,再現された不具合との関係を確かめる必要がある 。 そのためには,
現象確認の前後で 2度,ダイアグノーシス・コードを表示させなければならない 。
(
1
) ダイアグノーシス・コード表示方法 (
os-nによる表示)
-車両を停止状態にする 。
.
IG'SWを“ LOCK"後
, D
S-Iを DLCに接続する 。
.
IG.SWを“ ON"後 DS-Iを使用してダイアグノーシス・コードを 読み取る。
(
2
) ダイアグノーシス・コード表示方法 (
os-nによる消去)
宣言日 ・異常コード発生箇所を点検修理したときは,次に示す方法で ECUの記憶しているコードの消去を行う 。
-異常コードが消去できない場合は,再び異常コード発生箇所の点検修理を行う 。
-異常コードの消去を行うと,フリーズ・フレーム・データも消去されるので事前に消去してよいか確認する 0
.車両を停止状態にする 。
.
IG'SW“LOCK"後
, D
S-Iを DLCに接続する 。
.
IG.SW“ON"後 DS-Iを使用してダイアグノーシス・コードを消去する 。
F
H
υ
ハ
U
置温留置薗.
(
3
) ダイアグノーシス・コード表示方法 (
D
L
C端子短絡による表示) (
図 1-1
2,1
3
)
.車両が停止した状態で D
LCの ECU-T端子とアース端子を短絡する 。
図 1-12
D
L
C端子短絡
直 E コネクタの短絡位置を間違えると故障の原因になるため絶対に間違えないこと 。
.IG.SWを“ ON"にして メータ内 LCDに数字で表示されるダイアグノーシス・コードを読み取る 。
門門
L
'
L
'
て0
~~
プ
コu
c
:.
一
日
卜
ア
シ
ス
ト
コs
c
:
:
,
異常時
〈ダイアグ ノーシス・コード表示部)
(LCD部
〉
図 1-13 ダイアグノーシス・コードの読み取り
軍空白
・異常が発生している場合は,スマートアシスト OFFインジケータ,マスタ・ウォーニング・ランプが点灯
する 0
・コンビネーション・メータの L
CDにはスマートアシスト関係のダイアグノーシス・コードの他に,キー・
フリー・システム,
CAN通イ言システム, L
I
N通イ言システム,コンビネーション・メータのダイアグノーシス・
コードが表示される 。
CUの I
Dを 表 示 し 下 位 2桁にダイアグノーシス・コード N
oを表示する 。上位 2桁に i24Jと
-上位 2桁に E
表示されているときは, レーザ・レーダ・センサ E
CUのダイアグノーシス・コードが表示されているとき
である 。
・コードの表示は,記憶しているすべてのコードを小さな番号順に繰り返し表示する 。
・コードが一つの場合はコードを表示した後 4秒おいて再度表示し,コードが複数の場合はコード番号の小さ
なものから 2
.
5秒間隔で表示した後 4秒おいて,再度小さなものから順に表示する 。
(
4
)
ダイアグノーシス・コード表示方法 (
D
L
C端子短絡による消去)
-車両が停止した状態で D
LCの ECU-T端子とアース端子を短絡する 。
直E
コネクタの短絡位置を間違えると故障の原因になるため絶対に間違えないこと 。
① シフト・レンジを Pにする 。
② スマートアシスト OFFスイッチを 5秒以内に 5回押す。
-EA
Fhd
-2
直面函・
(
5
) 診断内容
ダイアグノーシス診断内容
コード N
o
.
4桁
P
0
5
7
1
P
1
5
7
6
C16CB
C1A10
C1All
C1A40
C1A41
C1A50
B
3
1
0
0
B
3
1
0
5
UO
lO
O
UO
l
O
l
U0
l2
2
U
0
1
2
3
U0
l2
6
U
0
1
5
5
U04
0
l
U
1
1
0
3
Ul
10
4
ウォーニング表示
コード記憶
0,な し ・x) (あり 0,なし
2桁
4
3
5
2
5
3
(あり
×
×
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
×
7
1
7
2
6
1
4
2
4
1
8
1
5
1
2
1
2
3
2
2
2
5
2
4
2
6
6
2
2
7
3
1
×
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
診断内容
x)
ス ト ッ プ ・ ラ ン プ ・リレー異常
舵 角 セ ン サ異 常
ヨー・レート・センサ異常
×
レーザ・レーダ異常
レーザ・レーダ光軸ズレ
E
F
I.
ECU異 常
VSCブレーキ信号異常
VSC異 常
CVT異 常
BODY.ECU異 常
E
F
I通 信 異 常
CVT通 信 異 常
VSC通 信 異 常
ヨー ・レート・センサ通信異常
×
舵角センサ通信異常
メータ通信異常
E
F
I信 号 異 常
I
D
S通 信 異 常
PCS信 号 異 常
(
6
)ECUデータ・モニタ及びフ リーズ・フレーム・データ
げ)概要
・レーザ・レーダ・センサ ECUのデータ・モニタには,スマートアシストの各制御の作動時情報を記憶する
ものがある 0
・作動時情報は,各制御作動時に前回データを上書きして記憶する 。
〈
データ・モニタ・グループ一覧〉
N
o
.
名称
故障フラグ
2
3
4
5
6
内
廿
打
、
,
スマートアシストの異常関連
車両情報
現在の車両状態関連
光軸調整
レーザ・レーダ・センサ E
CU光 軸 調 整 と 機 能 検 査 関 連
システム作動回数
低速域回避支援ブレーキと誤発進抑制制御機能の各制御作動回数関連
PCB作 動 時 情 報
低 速 域 回 避 支 援 ブ レ ー キ 作 動 時 の 車 両 状 態 関 連。 各 データは 三つ の 項 目 を 持 って お
り,それぞれ下記条件の車両状態を表示する 。
P-1・前回の 一 次ブレ ー キ開始時
P
O
:前 回 の 二 次 ブ レ ー キ 開 始 時
P
1 前回の二次ブレーキ終了時
MSP作 動 時 情 報
誤 発 進 抑 制 制 御 機 能 作 動 時 の 車 両 状 態 関 連。各データは二つの項目を持っており,
それぞれ下記条件の車両状態を表示する 。
MO:前 回 の 誤 発 進 抑 制 制 御 開 始 時
M1 前 回 の 誤 発 進 抑 制 制 御 終 了 時
h
戸 d
山
つ
匪温趨薗函・
(
口
) ECUデ ー タ ・ モ ニ タ 及 び フ リ ー ズ ・ フ レ ー ム ・ デ ー タ 一 覧
項目名称
(短縮名称)
単位
PCS用 メ ー タ 通 信
変化量の
最小値
説明
異常
メータ ECUとの CAN通信異常の有無を表示す
る。
PCS用 VSC通信 異
VSC.ECUとの CAN通信異常の有無を表示す
常
る。
PCS用 EFI/ENG通
信異常
EFI.ECUとの CAN通信異常の有無を表示す
PCS用 CVT通信異
CVT/e
c
o・IDLE.ECUにおける CVT.ECUと
の CAN通信異常の有無を表示する 。
戸
吊
.
u
.
PCS用 ECO通信異
常
PCS用 BODY通 信
る。
CVT/e
c
o・IDLE.ECUにおける e
c
o・IDLE.
ECUとの通信異常の有無を表示する 。
異常
ボデー統合 ECUとの通信異常の有無を表示す
る。
PCS用 舵 角 セ ン サ
通信異常
舵角センサとの CAN通信異常の有無を表示す
る。
PCS用 ヨ ー ・ レ ー
ヨー & Gセンサとの CAN通信異常の有無を表
示する。
ト通信異常
異常
PCS用 STPリレー
VSC.ECUからのストップ・ランプ・リレー異
常信号の有無を表示する 。
PCS用 VSC異常
VSC.ECU側の異常有無を表示する。
PCS用 VSC.BRK
信号異常
PCS用 EFI.ECU
異常
PCS用 CVT異常
レーザ・レーダ・センサ ECUから VSC.ECU
へのブレーキ要求に対して, VSC.ECUの応答
が異なっているかどうかを異常 /異常無で表示
する 。
EFI.ECU側の異常有無を表示する 。
CVT/e
c
o・
IDLE.ECU側の異常有無を表示する 。
PCS用 舵 角 セ ン サ
異常
PCS用 ヨ ー ・ レ ー
ト・センサ異常
PCS用 RAMミラー
異常
PCS用 LSR.ECU
異常
PCS用 レ ー ダ 光 軸
ずれ
舵角センサ側の異常有無を表示する 。
ヨー & Gセンサ側の異常有無を表示する 。
レーザ・レーダ ・センサ ECU内部の制御 RAM
値の異常有無を表示する 。
レーザ・レーダ・センサ ECU内部の異常有無
を表示する 。
光軸ずれが発生,又は光軸調整中ではないが光
軸調整未完であることをずれの有無で表示す
る。(データ・モニタ項目[レーダ光軸ずれ]も
しくは[レーダ光軸未調整]がそれぞれ[ずれ有
り
J
. [未調整]のとき)
レーザ・レーダ・センサ ECUの制御指示と,
EFI.ECUの制御状態との不一致 の有無を表示
EFI信 号 異 常
する 。
PCS信号異常
スマートアシスト制御において各 ECUが送受
信する制御信号の異常や,制御信号と実際の作
動との不一致の有無を表示する 。
ハード異常
レーザ・レーダ・センサ ECU内部回路の異常
有無を表示する。
光学系異常
レーザ・レーダ・センサ ECU受光部の異常有
無を表示する。
レーダ光軸ずれ
レーザ・レーダ・センサ ECU内部での光軸ず
れ検知の有無を表示する 。
※1
:0:対応
x 非対応
フリーズ・データ
対応 ※l
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
対応グループ
No.
1
l
1
1
1
1
F﹁U
つd
電温盟国函・
項目名称
(短縮名称)
変化量 の
最小値
単位
フ リー ズ ・デー タ 対応グ ルー プ
対応、 ※l
N
o
.
説明
光軸調整中で はないとき ,光軸調整未完かどう
かを未調整,調整済で表示する 。
レーダ光軸未調整
リセッ ト自己検知回
数
レー ザ ・レー ダ・センサ E
CU自体の リセッ ト
発生回数を表示する 。
回
誤発進データ異常検
出
E
F
I
'ECUがレーザ・
レー ダ ・セン サ E
CUか
らの信号異常を検知 したかどうかを表示する 。
誤発進指示長時間検
出
誤発進抑制制御における制御指示時間が所定時
聞を超えたかどうかを検出有無で表示する 。
全 閉指示長時間検出
I
.ECUに対する電子
緊急ブ レーキにお け る EF
ス ロ ッ トル 閉制御の制御指示時間が所定時間を
超えたかどうかを検出有無で表示する
自動ブレ ーキ時間超
過
緊急ブレ ーキ の作動時間が所定時間を超えたか
どうかを検出有無で表示する 。
レーザ指示値ガー ド
処理
レー ザ・レーダ ・センサ E
CUか ら の 信 号 異 常
をV
S
C
'ECUが検出 したかどうかを表示する 。
I
G電圧
V
基板温度
℃
0
.
0
7
レーザ・レ ー ダ・セン サ E
CUが認識する
源電圧を Vで表示する 。
I
G電
CU内 部 の 基 盤 温 度
レーザ ・レー ダ ・センサ E
を℃で表示する 。
ブ レー キ ・ペ ダ ル を 踏 ん で い る か ど う か を ス
トップ ・ランプ ・スイッチとブ レーキ 液圧など
から判断 し, ON
/
OFFで表示する 。
ABS~食出 STP スイッ
チ信号
右タ ー ン・スイッチ
CUが検出する右ターン ・スイッ
ボデ ー統 合 E
チ信号を ON
/
OFFで表示する 。
左タ ー ン ・スイッチ
CUが検出する右タ ー ン・スイッ
ボデー統合 E
チ信号を ON
/
OFFで表示する 。
ワイパ・スイッチ
ボデ ー統 合 E
CUが 検 出 す る ワ イ パ ・スイッチ
の位置情報を L
OW/
H.
I 0FF
/
I
NTの 2種 に 分
類 して表示する 。
スマ ート アシス ト のシステム OFF~犬態を ON /
PCS'OFFスイッチ
P
C
S用車速
加速度
k
m/
h
0
.
0
1
2
m/
s
0
.
02
d
e
g
スロットル開度
温度センサ値最大値
℃
温度センサ値最小値
℃
示する。
E
F
I
'ECUから入力 しているス ロ ッ トル開度を
0
.
0
07 d
e
g
(度)で表示する 。
CU内 部 の 基 盤 温 度
レーザ・レ ー ダ・センサ E
センサ検出温度の現 トリ ップ最大値を℃で表示
する 。
CU内 部 の 基 盤 温 度
レー ザ・レーダ・セン サ E
センサ検出温度の現 トリ ップ最小値を℃で表示
する 。
現在のレ ーザ ・レー ダ・センサ E
CUから E
F
I
.
ECUへのス ロ ッ トル 開 度 制 御 指 示 モ ー ドを 0
,
,
12
で表示する 。
0
:スマ ー トアシス トのス ロ ッ トル制御な し
1 誤発進抑制制御機能のス ロ ットル制御
2 低速域衝突回避支援ブ レー キ機能のス ロ ッ
トル制御
EFI
制御モード
操舵角なまし値※ 2
※1
:0:対 応
F
F
)
OFFで表示する 。 (システム ONのとき O
レー ザ・レ ー ダ ・センサ ECUが 認 識 す る 車 速
をk
m/
hで表示する 。
2
VSC'ECUが検出する車体加 速度を m/
s
で表
d
e
g
0
.0
1
舵角センサ検出の舵角を レー ザ・ レー ダ ・セン
サE
CUが 補 正 した 後 の 制 御 用 舵 角 値 を d
e
g
(度)で表示する 。 (右方向が正の値)
x 非対応
※2
:現在データ対応無 し
フリーズ・データ対応のみ
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
。
1
1
1
2
2
2
2
2
2
2
2
2
2
2
2
×
2
。
2
F
hd
A斗A
匪温誼薗薗.
項目名称
(短縮名称)
変化量の
最小値
単位
操舵速度 ※2
現勾配推定 ※2
d
e
g
/
s
0
.
0
1
%
0
.
1
フリーズ・データ
対応 ※l
説明
舵角センサ検出の舵角より演算 した操舵角速度
をd
e
g(度)/
s
で表示する 。
VSC'ECU信 号 か ら レ ー ザ ・ レ ー ダ ・ セ ン サ
ECUで演算した路面勾配推定値を%で表示す
る。
。
。
。
対応グループ
N
o
.
2
2
エコラン・モード ※2
エコ・アイドル制御モード(1~4) を表示する 。
エコ・アイドル制御モードについては,新型車
解説書 L
0
4e
c
o・I
D
L
Eシステム参照
前方障害物フラグ
誤発進抑制制御対象となる前方障害物をレー
CUが 検 知 し て い る か ど
ザ・レーダ・センサ E
うかを表示する 。
×
2
E
F
I実制制御
E
F
I
'ECUが誤発進抑制制御機能作動時制御を
行 っているかどうかを 制御中,制御外で表示
する 。
×
2
誤発進防止制御
誤発進抑制制御機能の 許可状態を表示する 。
×
2
検査モ ード (記憶)
機能検査が完了しているかどうかを完了 /未完
了で表示する 。
×
3
光軸調整フラグ(記
憶)
光軸調整が完了しているかどうかを表示する 。
×
3
2
垂直方向軸ズレ記憶
値
D
e
g
0
.
0
5
前回光軸調整完了時に記憶したレーザ・レーダ・
センサ ECUの垂直方向の軸ズレ 量 を d
e
g(度)
で表示する 。
×
3
垂直方向回転量記憶
値
回
0
.
5
前回光軸調整完了時に記憶した垂直方向ズレが
規定値になるまでの, 垂直方向エイミング・ス
クリュの必要回転数を表示する 。
×
3
水平方向軸ズ、レ記憶
値
D
e
g
0
.
0
5
前回光軸調整完了時に記憶したレーザ ・レーダ・
センサ ECUの水平方向の軸ズレ 量 を d
e
g(度)
で表示する 。
×
3
水平方向回転量記憶
値
回
0
.
5
前回光軸調整完了時に記憶した水平方向ズレ 量
が規定値になるまでの,水平方向エイミング・
スクリュの必要回転数を 表示する 。
×
3
CPUマスク I
D
A
S
I
C'
I
D
ROMSUM値
×
個体識別番号
×
×
×
PCB初 回 作 動 後 I
G
'ON
PCB作動累積回数
PCBA作 動 累 積 回
数
回
G'ON回数を表示する 。
一次ブレーキ作動後の I
×
4
回
一次ブレーキ作動の累積作動回数を表示する 。
×
4
×
4
回
衝突警報の作動累積
回
l
衝突警報の作動累積回数を表示する 。
×
誤発進防止作動累積
回
1
誤発進抑制制御の作動累積回数を表示する 。
×
4
4
ワイパ状態 P
-1
前回の 一次ブレーキ開始時のワイパ作動状態を
,
I L
O,I
N
τ ,OFF4段階で表示する 。
H
×
5
ワイパ状態 P
O
前回の 二次ブレーキ開始時のワイパ作動状態を
,
I L
O,I
N
T,OFF4段階で表示する 。
H
×
5
ワイパ状態 P
1
前回の 二 次ブレーキ終了時のワイパ作動状態を
N
T,OFF4段階で表示する 。
H
I,LO,I
×
5
Pレンジ信号 P-1
前回の 一 次ブレーキ開始時の,
有無を ON
,O
FFで表示する 。
Pレンジ信号の
×
5
Pレンジ信号 P
O
前回の 二 次ブレーキ開始時の,
有無を ON
,O
FFで表示する 。
Pレンジ信号 の
×
5
一
※1
:0 :
対応
x 非対応
※2
:現在データ対応無し
フリーズ・データ対応のみ
同U
F
Fhd
置温祖国薗.
項目名称
(短縮名称)
単位
変化量 の
最小値
説明
フ リー ズ ・デー タ 対応グル ープ
対応 ※l
N
o
.
Pレンジ信号 P1
前回の一次ブ レ キ終了時の, Pレンジ信号の
有無を ON
,O
FFで表示する 。
×
5
Rレンジ信号 P-1
前回の 次ブ レー キ開始時の, R レンジ信号の
有無を O
N,OFFで表示する 。
×
5
Rレンジ信号 PO
前回の 一 次ブレーキ開始時の, Rレンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Rレンジゃ信号 P1
前回の 一 次ブ レー キ終了時の, Rレンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Nレンジ信号 P-1
前回の 次ブ レー キ開始時の, Nレンジ信号の
N, OFFで表示する 。
有無を O
×
5
Nレンジ信号 PO
前回の 一 次ブ レ キ開始時の, Nレンジ信号の
有無を ON
,O
FFで表示する 。
×
5
Nレンジ信号 P1
前回の一次ブ レ キ終了時の, Nレンジ信号の
有無を ON
,O
FFで表示する 。
×
5
D レンジ信号 P-1
前 回 の 次 ブ レ キ開始時の ,D レンジ信号の
有無を ON
,O
FFで表示する 。
×
5
D レンジ信号 PO
前回の一次ブレ キ開始時の, D レンジ信号の
,O
FFで表示する 。
有無を ON
×
5
D レンジ信号 P1
前回の一次ブレ ー キ終了時の, D レンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Sレンジ信号 P-1
前回の 次ブレーキ開始時の, Sレンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Sレンジ信号 PO
削回の 一 次ブ レー キ開始時の, Sレ ンジ信号の
有無を ON
,O
FFで表示する 。
×
5
Sレンジ信号 P1
前回の一次ブレ ー キ終了時の, Sレンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Bレンジ信号 P-1
前回の 次ブレ ー キ開始時の, Bレンジ信号の
,O
FFで表示する 。
有無を ON
×
5
Bレンジ信号 PO
前回の 一 次ブレ キ開始時の, B レンジ信号の
有無を ON
,O
FFで表示する 。
×
5
Bレンジ信号 P1
前回の一次ブレ キ終了時の, Bレンジ信号の
有無を ON
,O
FFで表示する 。
×
5
則回の 次ブレ キ開始時の,レーザ・レーダ・
センサ ECUが推定した自車の右左折カ ー ブ半
径を mで表示する 。
×
5
推定カ ー ブ 半 径 P-
1
日1
推定カ ー ブ半径 PO
m
1
前回の 一次ブレ キ開始時の, レー ザ ・レー ダ ・
センサ ECUが 推 定 した自車の右左折カ ー ブ半
径を mで表示する 。
×
5
推 定 カ ー ブ 半 径 P1
m
1
則回の 一次ブレ キ終了時の,レーザ・レーダ・
センサ ECUが 推 定 した自車の右左折カ ー ブ半
径を mで表示する 。
×
5
PCS用 車 速 P-1
km/
h
0
.0
1
前回の 次ブ レ キ開始時の,レ ーザ・レーダ ・
センサ ECUが推定 した車速を表示する 。
×
5
PCS用 車 速 PO
km/
h
0
.0
1
削回の 一次ブレ キ開始時の,レーザ ・レーダ ・
センサ ECUが推定 した車速を表示する 。
×
5
PCS用 車 速 P1
km/
h
0
.
01
前回の一次ブ レ キ終了時の,レ ーザ・レ ー ダ
・
センサ ECUが推定 した車速を表示する 。
×
5
物標 t
t
cP-1
S
0
.
0
1
前回の 次ブレーキ開始時の ,前方障害物に衝
突するまでの予測時間を表示する 。
×
5
物標 t
t
cPO
S
0.
0
1
前回の 一 次ブレ ーキ開始時の,前方障害物に衝
突するまでの予測時間を表示する 。
×
5
物標 t
t
cP1
S
0.
0
1
前回の 一次ブレ ー キ終了時の,前方障害物に衝
突するまでの予測時間を表示する 。
×
5
※1
:0
:対 応
x 非対応
F円U
phv
置温D1函・
項目名称
(短縮名称)
単位
変化量の
最小値
フリーズ・データ
対応、 ※l
説明
距離 P-1
町l
0
.
0
1
前回の一次ブレ ーキ開 始時の,
物との距離を表示する 。
自車 と前方障害
O
距離 P
ロ1
0
.
0
1
前回の 二次ブレーキ開始時の,
物との距離を表示する 。
自車と前方障害
1
距離 P
m
0
.
0
1
前回の 二次ブレ ーキ 終了時の,
物との距離を表示する 。
自車と前方障害
deg
0
.
0
1
操舵角なま し値 P
O
deg
1
操舵角なま し値 P
対応グループ
N
o
.
×
5
×
5
×
5
前回の一次ブレーキ開始時の,レ ーザ・レー ダ
・
センサ E
CUが使用する操舵角現在値を表示す
る。 (右方向が正の値)
×
5
0
.
0
1
前回の 二次ブレーキ開始時の ,レーザ・レーダ・
センサ E
CUが使用する操舵角現在値を表示す
る。 (右方向が正の値)
×
5
deg
0
.
0
1
前回の 二次ブレーキ終了時の,レーザ ・レー ダ
・
センサ E
CUが使用する操舵角現在値を表示す
る。 (右方向が正の値)
×
5
操舵速度 P-1
deg
/
s
0
.
0
1
前回の一次ブレ ーキ 開始時のレーザ・レーダ・
センサ E
CUが計算した操舵速度を表示する 。
×
5
操舵速度 P
O
deg
/
s
0
.
0
1
前回の 二次ブレ ーキ 開始時のレーザ・レ ーダ・
センサ E
CUが計算 した操舵速度を表示する 。
×
5
1
操舵速度 P
deg
/
s
0
.
0
1
前回の 二次ブレーキ終了時のレ ーザ・レー ダ・
センサ E
CUが計算した操舵速度を表示する 。
×
5
現勾配推定 P-1
%
0
.
1
前回の 一次ブレ ーキ 開始時のレ ーザ・レー ダ・
センサ E
CUが計算した路面勾配推定値を表示
する 。
×
5
O
現勾配推定 P
%
0
.
1
前回の 二次ブレ ーキ 開始時のレーザ・レーダ ・
センサ E
CUが計算 した 路面勾配推定値を表示
する 。
×
5
1
現勾配推定 P
%
0
.
1
前回の 二次ブレ ーキ 終了時のレーザ・レ ーダ・
センサ E
CUが計算した路面勾配推定値を表示
する 。
×
5
deg
0
.
0
0
7
前回の一次ブレーキ開始時のス ロ ットル開度を
表示する 。
×
5
O
ス ロッ トル開度 P
deg
0
.
0
0
7
前回の 二次ブレーキ開始時のスロットル開度を
表示する 。
×
5
1
スロッ トル開度 P
deg
0
.
0
0
7
前回の 二次ブレ ーキ 終了時のスロットル開度を
表示する 。
×
5
rpm
0
.
7
8
前回の一次ブレーキ開始時のエンジン回転数を
表示する 。
×
5
エンジン回転数 P
O
rpm
0
.
7
8
前回の二次ブレ ーキ 開始時のエンジン回転数を
表示する 。
×
5
1
エンジン回転数 P
rpm
0
.
7
8
前回の 二次ブレーキ終了時のエンジン回転数を
表示する 。
×
5
アクセル・ペダル開
度 P1
%
0
.
0
1
前回の 一次ブレーキ開始時のアクセル・ペダル
踏み込み量 を表示する 。
×
5
アクセル・ペダル開
度P
O
%
0
.
0
1
前回の 二次ブレ ーキ 開始時のアクセル・ペダル
踏み込み量 を表示する 。
×
5
アクセル・ペダル開
度P
1
%
0
.
0
1
前回の 二次ブレ ーキ 終了時のアクセル・ペダル
踏み込み量 を表示する 。
×
5
前回の一次ブレーキ開始時の時間カウン トを
メータが行っているかレーザ ・レー ダ・センサ
ECUが行っているかを通常 /独自で表示する 。
×
5
操舵角なま し値 P-
1
スロッ トル開度 P-
1
エンジン回転数 P-
1
独自カウント識別 P
-1
※1
:0 :
対応
x
非対応
Fhd
i
門
・
・
四
置問E E
対応グループ
説明
フリーズ・データ
対応 ※l
独自カウント識別 P
O
前回の 一 次ブレーキ開始時の時間カウントを
メータが行っているかレーザ・レーダ・センサ
ECUが行 っているかを通常 /独自で表示する 。
×
5
独自カウント識別 P
1
前回の一 次ブレーキ終了時の時間カウントを
メータが行っているかレーザ・レーダ・センサ
ECUが行 っているかを通常 /独自で表示する 。
×
5
×
5
×
5
×
5
×
5
項目名称
(短縮名称)
単位
変化量 の
最小値
N
o
.
時間カウンタ P-1
S
0
.
1
前回の 次ブレーキ開始時の,
過時間を表示する 。
IG'ON後 の 経
時間カウンタ PO
S
0.
1
前 回 の 一 次ブレーキ開始時の,
過時間を表示する 。
IG'ON後 の 経
時間カウンタ P1
S
0.
1
前回の 一 次ブレーキ終了時の,
過時間を表示する 。
IG'ON後 の 経
T
r
i
pカウンタ P-1
回
前回の
する 。
T
r
i
pカウンタ PO
回
前回の 一 次ブレーキ開始時のトリップ数を表不
する 。
×
5
T
r
i
pカウンタ P1
回
前回の 一 次ブレーキ終了時のトリップ数を 表不
する 。
×
5
スト ップ・ランプ・
スイッチ P-l
前回の 次ブレーキ開始時にブレーキ・ペダル
を踏んでいるかどうかをスト ップ・ランプ・ス
イッチとブレーキ液圧等 から判断し, ON
/
OFF
で表示する 。
×
5
スト ップ・ランプ・
スイ ッチ PO
前回の 一 次ブレーキ開始時にブレーキ・ペダル
を踏んでいるかどうかをスト ップ・ランプ・ス
イ ッチとブレーキ液圧などから判断し, ON
/
OFFで表示する 。
×
5
前回の 一 次ブレーキ終了時にブレーキ・ペダル
を踏んでいるかどうかをストップ・ランプ・ス
イ ッ チ と ブ レ ー キ液圧などから判断し, ON
/
OFFで表示する 。
×
5
ストッフ。・ラン f.
スイッチ Pl
次ブレーキ開始時のトリップ数を表不
加速度 P-l
2
m/
s
0
.
0
2
前回の 一 次ブレーキ開始時の V
SC'ECUから
送信 される車両加速度を 表示する 。
×
5
加速度 PO
2
m/
s
0
.
0
2
前回の 一 次ブレーキ開始時の V
SC'ECUから
送信 される 車両加速度を 表示する 。
×
5
加速度 Pl
2
m/
s
0
.
0
2
前回の 一 次ブレーキ終了時の V
SC'ECUから
送信される車両加速度を表示する 。
×
5
ワイパ状態 MO
前回の誤発進抑制制御開始時のワイパ作動状態
をH
I,LO,I
N
T,OFF4段階で表示する 。
×
6
ワイパ状態 Ml
前回の誤発進抑制制御終了時のワイパ作動状態
I,LO,INT, OFF4段階で表示する 。
をH
×
6
Pレンジ信号 MO
前回の誤発進抑制制御開始時の, Pレンジ信号
の有無を ON
,O
FFで表示する 。
×
6
Pレンジ信号 Ml
前回の誤発進抑制制御終了時の, Pレンジ信 号
の有無を ON
,O
FFで表示する 。
×
6
Rレンジ信号 MO
前回の誤発進抑制制御開始時の, Rレンジ信号
,O
FFで表示する 。
の有無を ON
×
6
Rレンジ信号 Ml
前回の誤発進抑制制御終了時の, Rレンジ信号
の有無を ON
,O
FFで表示する 。
×
6
Nレンジ信号 MO
前回の誤発進抑制制御開始時の, Nレンジ信号
の有無を ON
,O
FFで表示する 。
×
6
Nレンジ信号 Ml
前回の誤発進抑制制御終了時の, Nレンジ信号
の有無を ON
,O
FFで表示する 。
×
6
※1
:0 :
対応
x 非対応
-h
d
o
o
E....
園
'
項目名称
(短縮名称)
説明
フリーズ・データ
対応 ※l
Dレンジ信号 MO
前回の誤発進抑制制御開始時の .Dレンジ信号
N
. OFFで表示する 。
の有無を O
×
6
Dレンジ信号 M1
前回の誤発進抑制制御終了時の .Dレンジ信号
の有無を O
N
. OFFで表示する 。
×
6
Sレンジ信号 MO
前回の誤発進抑制制御開始時の.
の有無を O
N
. OFFで表示する 。
Sレンジ信号
×
6
Sレンジ信号 M1
別回の誤発進抑制制御終了時の.
の有無を O
N
. OFFで表示する 。
Sレンジ信号
×
6
Bレンジ信号 MO
前回の誤発進抑制制御開始時の .Bレンジ信号
の有無を O
N
. OFFで表示する 。
×
6
Bレンジ信号 M1
削回の誤発進抑制制御終了時の .Bレンジ信号
N
. OFFで表示する 。
の有無を O
×
6
単位
変化量の
最小値
対応グループ
N
o
.
PCS用 車 速 MO
km/
h
0
.
0
1
前回の誤発進抑制制御開始時の, レーザ・レー
ダ・センサ ECUが推定した車速を表示する 。
×
6
PCS用 車 速 M1
km/
h
0
.
0
1
前回の誤発進抑制制御終了時の, レーザ・レー
ダ・センサ ECUが推定した車速を表示する 。
×
6
距離 MO
m
0
.
0
1
別回の誤発進抑制制御開始時の,
害物との距離を表示する 。
×
6
距離 M1
m
0
.
0
1
前回の誤発進抑制制御終了時の,自車と則方障
害物との距離を表示する 。
×
6
操舵角なまし値 MO
deg
0
.
0
1
前回の誤発進抑制制御開始時の, レーザ・レー
ダ・センサ ECUが使用する操舵角現在値を表
示する 。 (右方向が正の値)
×
6
操舵角なまし値 M1
deg
0
.
0
1
前回の誤発進抑制制御終了時の, レーザ・レー
ダ・センサ ECUが使用する操舵角現在値を表
示する 。 (右方向が正の値)
×
6
操舵速度 MO
deg
/
s
0
.
0
1
誤発進制御開始時のレ ザ ・レーダ・センサ
ECUが使用する操舵速度を表示する 。
×
6
操舵速度 M1
deg
/s
0
.
0
1
誤発進制御終了時のレーザ・レーダ・センサ
ECUが使用する操舵角度を表示する 。
×
6
現勾配推定 MO
%
0
.
1
則回の誤発進抑制制御開始時の路面勾配推定値
を表示する 。
×
6
現勾配推定 M1
%
0
.
1
則回の誤発進抑制制御終了時の路面勾配推定値
を表示する 。
×
6
スロットル開度 MO
deg
0
.
0
0
7
前回の誤発進抑制制御開始時のスロットル開度
を表示する 。
×
6
スロットル開度 M1
deg
0
.
0
0
7
前回の誤発進抑制制御終了時のスロットル開度
を表示する 。
×
6
エンジン回転数 MO
rpm
0
.
7
8
前回の誤発進抑制制御開始時のエンジン回転数
を表示する 。
×
6
エンジン回転数 M1
rpm
0
.
7
8
前回の誤発進抑制制御終了時のエンジン回転数
を表示する 。
×
6
アクセル・ペダル開
度 MO
%
0
.
0
1
前回の誤発進抑制制御開始時のアクセル・ベダ
ル踏み込み量 を表示する 。
×
6
アクセル・ペダル開
度 M1
%
0
.
0
1
則回の誤発進抑制制御終了時のアクセル・ベダ
ル踏み込み量 を表示する 。
×
6
前回の誤発進抑制制御開始時の時間カウントを
メータが行っているかレーザ・レーダ・センサ
ECUが行っているかを通常 /独自で表示する 。
×
6
前回の誤発進抑制制御終了時の時間カウントを
メータが行っているかレーザ・レーダ・センサ
ECUが行っているかを通常 /独自で表示する 。
×
6
独自カウント識別
MO
独自カウント識別
M1
1
:0:対応
x 非対応
-5
9-
自車と則方障
・
宙開E E・四且
項目名称
(短縮名称)
単位
変化量の
最小値
説明
フ リー ズ・デー タ 対応グループ
対応、 ※l
No.
時間カウンタ MO
S
0.
1
前回の誤発進抑制制御開始時の ,I
G.ON後の
経過時間を表示する 。
×
6
時間カウンタ M1
S
0.
1
前回の誤発進抑制制御終了時の IG.
ON後の経
過時間を表示する 。
×
6
Tri
pカウンタ MO
回
1
前回の誤発進抑制制御開始時の トリ ップ数を表
示する 。
×
6
T
r
i
pカウンタ M1
回
前回の誤発進抑制制御終了時の トリ ップ数を表
示する 。
×
6
ス トップ・ランプ・
スイッチ MO
前回の誤発進抑制制御開始時にブレーキ・ペダ
ルを踏んでいるかどうかをストップ ・ランプ・
スイッチとブレ ーキ液圧などから判断 し,ON
/
OFFで表示する 。
×
6
ス トップ・ランプ ・
スイッチ M1
l
前回の誤発進抑制制御終了時にブレーキ ・ベダ
ルを踏んで、いるかどうかをス トップ・ランプ・
スイッチとブレ ーキ液圧などから判断 し, ON
/
OFFで表示する 。
×
6
加速度 MO
2
m/
s
0.
0
2
前回の誤発進抑制制御開始時の VSC.ECUか
ら送信される車両加速度を表示する 。
×
6
加速度 M1
2
m/
s
0
.
0
2
前回の誤発進抑制制御終了時の VSC.ECUか
ら送信される車両加速度を表示する 。
×
6
強制停止状態
カスタマイズやスマ ー トアシス トOFFスイッ
チに よるスマー トア シ ス ト 常 時 OFF機 能 の
ON,OFFを停止中,停止な しで表示する 。
×
発進報知カスタマイ
ズ情報
カスタマイズに よる先行車発進お知らせ機能の
制御の ON
,OFFを報知あり,報知な しで表示
する 。
×
検査モ ー ド完了フラ
、
夕
スマートアシス トの機能検査完了 /未完了状態
をモード完了,モード未完で表示する 。
×
記憶 しているダイアグノーシス ・コー ド数を表
示する 。
×
現在の ト
リ ップ数を表示する 。
×
1
トリ ップ及び時間カウント数がメ ー タ ECUの
カウン トした情報(共有デー タ)の場合は通常,
レーザ、・レ ー ダ ・センサ ECUカ宝カウン トした
情報は独自で表示する 。
×
0.
1
現在 トリ ップにおける I
G.SW“ON"後の経過
時間を秒で表示する 。
×
ダイアグ・コード数
f
固
トリップ・カウンタ
独自カウン ト識別
時間カウント
※1
:0:対 応
S
x 非対応
川 ECUデータ・モニタ参考値一覧
項目名称(短縮名称)
点検条件
PCS用メータ通信異常
PCS用 VSC通信異常
PCS用 EFI
/ENG通信異常
PCS用 CVT通信異常
PCS用 ECO通信異常
PCS用 BODY通信異常
PCS用舵角センサ通信異常
PCS用ヨー・レ ー ト通信異常
PCS用 STPリレー異常
PCS用 VSC異常
PCS用 VSC.BRK信号異常
-6
0-
参考値
E~薗薗.
項目名称(短縮名称)
点検条件
参考値
-光軸調整中でない
-光軸調整未完
未調整
-光軸調整中でない
-光軸調整完了
調整済
PCS用 E
F
I
.ECU異常
PCS用 CVT異常
PCS用舵角センサ異常
P
C
S用ヨー・レート・センサ異常
PCS用 RAMミラー異常
PCS用 L
S
R
'ECU異常
PCS用レーダ光軸ずれ
E
F
I信号異常
PCS信号異常
ハード異常
光学系異常
レーダ光軸ずれ
レーダ光軸未調整
リセット自己検知回数
誤発進データ異常検出
誤発進指示長時間検出
全閉指示長時間検出
自動ブレーキ時間超過
レーザ指示値ガード処理
I
G電圧
基板温度
ABS検:出 S
T
P
'SW信号
右ターン・スイッチ
左ターン・スイッチ
ワイパ・スイッチ
PCS'OFFスイッチ
PCS用車速
I
Gスイッチ“ ON"
I
Gスイッチ“ ON"
ブレーキ・ペダルを深く踏み込む
ブレ)キ・ペダルを踏まない
右ターン・スイッチ“ O
N
"
右ターン・スイッチ“ O
F
F
"
N"
左ターン・スイッチ“ O
左ターン・スイッチ“ O
F
F
"
ワイパ・スイッチ“ O
N"
ワイパ・スイッチ“ O
FF"
スマートアシスト
スマートアシスト
OFFインジケータ点灯
OFFインジケータ消灯
停車時
バッテリ電圧
約lOO
O
C以下
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Okm/
h
走行中
スピードメータとほぼ同じ
-エンジン停止
-アクセル・ペダル全閉時
約0
。
-エンジン停止
-アクセル・ペダルを徐々に踏み込む
踏み込み量に合わせて上昇する
加速度
スロットル開度
-エンジン停止
-アクセル・ペダル全開時
約8
0C~ 8
2C
誤発進抑制制御機能検査中に車両停止状態から
アクセル・ペダルを踏み込む
1
0
0
温度センサ値最大値
温度センサ値最小値
EFI制御モード
操舵角なまし値
一
操舵速度
-EA
F
l
o
電温Z薗函・
項目名称(短縮名称)
点検条件
参考値
自車前方約 4m以内に誤発進抑制制御作動
対象物が存在する
検知有
自車前方約 4m以内に誤発進抑制制御作動
対象物が存在 しない
検知無
誤発進抑制制御機能検査中に,車両停止状 態
からアクセル・ペダルを踏み込む
制御中
誤発進抑制制御機能の作動条件を満たさない
禁止
誤発進抑制制御機能の作動条件を満たす
許可
現勾配推定
エコ ラン ・モ ード
前方障害物フラグ
EFI実制制御
誤発進防止制御
検査モード(記憶)
光軸調整フラグ(記憶)
垂 直 方 向軸ズレ記憶値
検査モ ード完了 している
完了
検査モード完了 して いない
未完了
光軸調整完了 して いる
完了
光軸調整完了 していない
未完了
光軸調整完了 している
O.5deg~ O.
5deg
光軸調整完了している
O.
5deg~ O
.
5
deg
垂直方向回転量記憶値
水平方向軸ズレ記憶値
水 平 方 向 回 転量記憶値
CPUマスク ID
ASI
C.ID
ROMSUM値
個体識別番号
PCB初回作動後 IG.ON
PCB作 動 累 積 回 数
PCBA作動累積回数
衝突警報の作動累積
誤発進防止作動累積
ワイ パ状態 P-l
ワイ パ状態 PO
ワイパ状態 Pl
Pレンジ信号 P-l
Pレンジ信号 PO
Pレンジ信号 Pl
R レン ジ信号 P-l
R レンジ信号 PO
R レンジ信号 Pl
N レンジ信号 P-l
N レンジ信号 PO
N レンジ信号 Pl
D レンジ信号 P-l
D レンジ信号 PO
D レンジ信号 Pl
Sレンジ信号 P-l
Sレンジ信号 PO
Sレンジ信号 Pl
B レンジ信号 P-l
B レンジ信 号 PO
B レンジ信号 Pl
U
pnv
つ
置温直薗凶・
項目名称(短縮名称)
点検条件
推 定 カ ー ブ 半 径 P-1
推定カーブ半径 PO
推 定 カ ー ブ 半 径 P1
PCS用 車 速 P-1
PCS用 車 速 PO
PCS用 車 速 P1
物標 t
t
cP-1
物標 t
t
cPO
物標 t
t
cP1
距 離 P-1
距 離 PO
距 離 P1
操 舵 角 な ま し 値 P-1
操 舵 角 な ま し 値 PO
操 舵 角 な ま し 値 P1
操 舵 速 度 P-1
操 舵 速 度 PO
操 舵 速 度 P1
現 勾 配 推 定 P-1
現 勾 配 推 定 PO
現 勾 配 推 定 P1
ス ロ ッ ト ル 開 度 P-1
ス ロ ッ ト ル 開 度 PO
ス ロ ッ ト ル 開 度 P1
エン ジン回転数 P-1
エ ン ジン回転数 PO
エ ン ジン回転数 P1
アクセル・ペダル開度 P-1
アクセル・ペダル開度 PO
アクセル・ペダル開度 P1
独 自 カ ウ ン ト 識 別 P-1
独 自 カ ウ ン ト 識 別 PO
独 自 カ ウ ン ト 識 別 P1
日寺間カウンタ P-1
時間カウンタ PO
時間カウン夕刊
Tripカウンタ P-1
Tripカウンタ PO
Tripカウンタ P1
ストップ・ランプ・スイッチ P-1
ストップ・ランプ・スイッチ PO
ストッ 7 ・ランプスイッチ P1
0
加 速 度 P-1
加 速 度 PO
加 速 度 P1
ワイパ状態 MO
ワイパ状態 M1
Pレンジ信号 MO
参考値
phu
qJ
-~~・E・項目名称(短縮名称)
点検条件
参考値
FF機能作動時
スマートアシスト常時 O
停止中
スマートアシスト常時 O
FF機能非作動時
停止無
Pレンジ信号 Ml
Rレン ジ信号 MO
Rレンジ信号 Ml
Nレンジ信号 MO
Nレンジ信号 Ml
Dレンジ信号 MO
Dレンジ信号 Ml
Sレンジ信号 MO
Sレンジ信号 Ml
Bレンジ信号 MO
Bレンジ信号 Ml
PCS用車速 MO
PCS用車速 Ml
距離 MO
距離 Ml
操舵角なまし値 MO
操舵角なまし値 Ml
操舵速度 MO
操舵速度 Ml
現勾配推定 MO
現勾配推定 Ml
ス ロ ッ トル開 度 MO
スロットル開度 Ml
エンジン回転数 MO
エンジン回転数 Ml
アクセル・ペダル開度 MO
アクセル・ペダル開度 Ml
独自カウント識別 MO
独自カウント識別 Ml
時間カウンタ MO
時間カウンタ Ml
T
r
i
pカウンタ MO
T
r
i
pカウンタ Ml
ストップ・ランプ・スイッチ MO
ストップ・ランプ・スイ ッチ Ml
加 速 度 MO
加 速 度 Ml
強制停止状態
DS-Iの[発進通知カスタマイズ情報]が
発進報知カスタマイズ情報
「発進報知なし j
DS-Iの[発進通知カスタマイズ情報]が
「発進報知有り」
検査モード完了フラグ
ダイアグ・コード数
トリ ップ ・カウンタ
独自カウント識別
時間カウント
-6
4-
報知無
報知有
-~司E・E・四・
直L
JECUデータ・モニタの値は,測定上わずかな 差,
測定環境の違い又は車両の経時変化などにより値が大きく
バラツキ,明確な基準値を示すことが困難である 。 したがって,参考値内であっても不具合となる場合がある 。
(
7
) システム配線図(図 1-14)
「一一一一一一一ー一一一一 1
i キーフリーシステム装着車 i
!
I
キ ー フ リ ー ECU I
:
.
o
しIN2
,
.
c
i
L
lNl
L上-一一一一一一一一一一一~lJ
│キー・フリー・システム│
!非装着車
」
レーサー.レーダ・
4iI
G センサ ECU
テール・リレー
IG.AMl (TAIL
ヒューズ・ブロック
1
)PCS
ヨー &Gセンサ
舵角センサ
CANH
CANし
ストップ・ランプ・
リレー
EFト ECU
T
Tム
一
-
バッテリ
CANH
HCAN
CANL
LCAN
STP
CVT/eco・IDLE.
ECU
CANH
STP
図 1-14 システム配線図
-6
5-
CANL
CAN通信
・
・
,
.
宙開E E
(
8
) 入出力信号基準値(図 Iー 1
5
)
(
イ
) テスタを使用して電圧等を測定する。
端子番号(端子名称)
1(
P
C
S
)~ 6(
G
N
D
)
4(
IG
)~ 6(
G
N
D
)
6(GND)~ ボデー・アース
入出力
入力
測定条件
項目
電圧
スマートアシスト
いるとき
OFFス イ ッ チ を 押 し て
スマートアシスト
いないとき
OFFス イ ッ チ を 押 し て
入力
電圧
IG.SW“ON"
IG.SW“OFF"
GND
導通
常時
図 I-15 入 出 力 信 号 基 準 値
-6
6-
基準値
約
o
v
バッテリ電圧
バッテリ電圧
約
o
v
導通あり
© Copyright 2026 Paperzz