状態遷移を用いたゲリラ豪雨の予測*
集中豪雨による災害防止に向けて
Guerrilla Rainstorm prediction of using a state transition
稲福澄春**
玉城史朗***1
平田哲兵***2
山田広幸***3 大澤慎吾***4
Subaru INAFUKU Shiro TAMAKI Teppei HIRATA Hiroyuki YAMADA
Shingo OHSAWA
1. 研究背景
ような自然現象を解析することが可能となれば豪雨に
近年ゲリラ豪雨による被害が全国で多発している。
ゲリラ豪雨は降雨の範囲が局地的で突発的に発生する
よる被害を防止するための有力な手段と成り得る。
ため予測が困難である。ゲリラ豪雨による被害の具体
例として以下のものが報告されている。
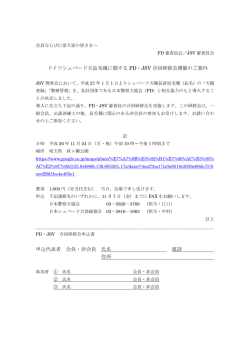
2. WITH レーダー
2013 年 7 月 28 日に発生した山口島根豪雨で死者 2
ダーを使用する。WITH レーダーにより観測されたデー
人、行方不明者 2 人、家屋の全壊が 41 戸 [1]。
気象庁は「特別警報」に準じた初めての対応を取
タを使用し、局所的地域における降水強度を推定する。
WITH レーダーは琉球大学工学部一号館屋上に設置され
る。
2013 年 8 月 24 日島根県において 2013 年 7 月 28
ており、以下の特徴を持つ。
本体のサイズは全長 1m 弱
日の豪雨に匹敵する記録的な大雨となり、死者 1
ゲリラ豪雨などの発生原因である積乱雲の発達過
人、家屋の全壊が 8 戸 [2]。
気象庁は「特別警報」に相当すると発表。
程をとらえるため、高度 2km 以下の観測が可能
ドップラー方式を用いた観測
また、(株)ウェザーニューズのまとめによると東京
都内でゲリラ豪雨の発生回数が昨年の 2 倍にものぼっ
周波数は 9340MHz(X バンド)、30W
サンプリングタイムは約 6 秒
ていることが明らかとなった。このようなゲリラ豪雨
による被害を未然に防止するためには可能な限り長時
観測可能範囲は半径 50km
空間解像度は 150m メッシュ
本研究では、(株)ウェザーニューズ所有の WITH レー
すなわち、WITH レーダーはドップラー効果を応用し
間後における降水量を予測する必要がある。我々はこ
れまで(株)ウェザーニューズ所有の WITH レーダー
[3]による観測データを基に自己回帰モデルを用いて
て観測対象の位置に加えて移動を観測できるため、雨
雲の発達、持続時間に加え、移動方向、移動速度の観
解析を行い降水強度の予測を行ってきた [4]。しかし、
WITH レーダーのサンプリングタイムが不等間隔である
測が可能となる。
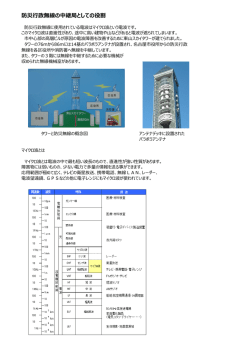
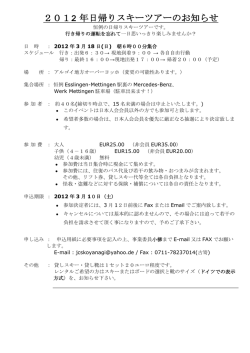
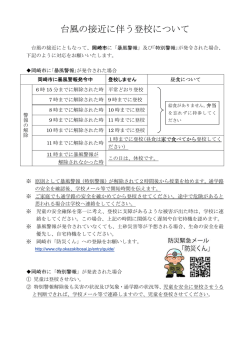
図 1 (左)は 2010 年 9 月 13 日に沖縄県北谷町を中心
という問題点があった。また、長時間後の降水強度を
とした局所的集中豪雨を琉球大学工学部一号館屋上か
予測する際は予測値を用いての予測となるため誤差が
拡大する。
ら観測した画像である。図 1(右)は WITH レーダーで計
測した地域的な降水量である。降水量は、青色から赤
我々の研究目的は、数時間後(30 分~1 時間)におけ
るゲリラ豪雨の発生を可能な限り予測し、その推移を
色に推移するにつれ増大する。従って、地図上の赤色
の部分が図 1 左の写真で観測された集中豪雨の領域で
解析することである。本研究では、まず、30 分~1 時
間以内で発達・消滅するゲリラ豪雨の雨量予測を行う。
ある。この領域は、降水強度 30mm/h 以上であった。
予測手法として、現在の状態から次の状態へ変化する
事象をマルコフモデルとみなした状態遷移アルゴリズ
ムを導入する。ところで、状態遷移を用いた予測方法
は任意に定義できるため、様々な予測方法が発案可能
となる。このように、状態遷移を用いてゲリラ豪雨の
図 1. 観測画像およびゲリラ豪雨
*平成 25 年 11 月 13 日第 35 回風力エネルギー利用シンポジウムにて講演
**,***1 会員 琉球大学
***2,***3 非会員 琉球大学
3. WITH レーダーによる台風の観測
***4 非会員 (株)ウェザーニューズ
ここでは、2012 年に沖縄本島に上陸した台風の観測
*** 非会員 (株)○○○○工業
-375-
結果を示す。
3.1.
レーダーで観測した台風
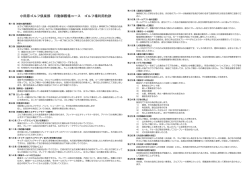
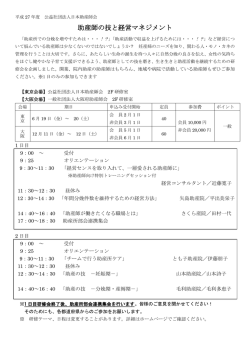
図 2 は名護に設置された WITH レーダーで観測した
台風 15 号の画像である。図 2(左) は降水強度を観測
した画像、図 2 (右)はドップラー速度を観測した画像
である。画像中の観測データの抜けている部分が円を
描いており、この部分が台風の目である。
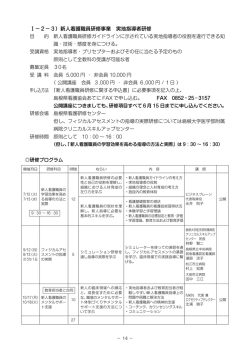
図 4. 折り返し補正例
4. 予測方法
図 5 のように時系列順に観測した横 X ピクセル、縦
Y ピクセルの観測画像をサンプル値データ群とする。
時刻 i における座標(j,k)の降水強度を
と表記
図 2. WITH レーダーで観測した台風画像
3.2.
する。ここで i を 0 から t まで増分することにより、
時系列データ
、
、
・・・、
が作成
観測値折り返しについて
雲の移動速度および移動方向を表すドップラー速度
については風速-16m/s~16m/s の範囲まで観測可能で
できる。データは時間とともに、降水強度の状態間を
遷移する。この様子を状態遷移図で表す。得られた降
ある。しかし、台風等で雲の移動速度がこの観測範囲
を超える場合は折り返し現象が起こるため、実際のド
水強度の時系列データを基に状態遷移図を作成し、予
を求める。この処理を座標(0,0)から
測値
ップラー速度を観測することはできない。その場合は
補正を行い解析する必要がある。
(X,Y)まで処理することで全座標の予測値が求まる。
各ピクセルに適用する予測方法として状態遷移確率
折り返し現象とはナイキスト定理による信号再構成
期待値による予測を提案する。具体例として、ある注
の概念を適用したものである。ここで、補正前後の周
波数折り返しの概要を図 3 に示す。実際の標的のドッ
目するピクセルから以下の 30 個の時系列データ
{0,0,13,13,・・・,9,8,8}(左から時刻 t=1,2,・・・,30)
プラー周波数が、検出可能な最大ドップラー周波数を
超える場合は、レーダーで測定される周波数に折り返
が得られた場合の予測方法について説明する。
図 6 に状態遷移図を示す [6]。状態遷移確率の期待
しが生じ、ドップラー周波数が不確定になる [5]。
値による予測とは、予測直前の値が状態遷移する確率
図 4 に実際の観測画像を用いた折り返し補正例を示
す。この例では、台風 21 号について折り返し補正を行
から降水強度期待値を求める方法である。この例にお
いては予測直前の値が 8 であるため図 6 の 8 の部分に
った。本来レーダーで観測可能な範囲は、図 4(右)の
ラベルが示す-16m/s(青)~16m/s(赤)であるが、補正を
注目する。この場合は 8×2/3+10×1/3 8.67 が予測値
となるが、降水強度は 0~14 の整数で表されるため、
行う場合は新たな範囲を定義しなければならない。こ
の例では、新たに風速 32m/s(緑)までの範囲を定義し
四捨五入を行い 9 を予測値とする。
補正を行った。補正後の画像から確認できるようにレ
ーダーに近づく方向へ移動が観測された青色の部分を、
赤色よりも遠ざかる緑色の部分へ補正を行った。
図 5. サンプル画像中における各座標の降水強度
図 3. ドップラー速度折り返し
-376-
図 7. 発達過程予測結果
表 1. 発達過程予測精度比較
自己回帰モデルによる予測
最尤法
91.45%
Burg 法
90.93%
Yule-Walker
88.63%
最小二乗法
87.43
状態遷移による予測
期待値予測
91.96%
図 6. 状態遷移図例
5.
図 8 に予測画像、表 2 に先行研究 [4]との予測精度比
較を示す。表 2 に示すように、状態遷移を用いた期待
予測精度評価手法
本章では、予測画像の予測精度評価方法を説明する。
降水強度は 0~14 までの 15 段階で表されるため、実
測値と予測値の誤差の最大値は 14 となる。予測精度の
値予測は先行研究と比べ精度の高い予測を行うことが
できた。
評価方法とし、誤差率(ER)は以下のように定義した。
式(1)に誤差率の定義式を示す。また、予測精度を 100%
から式(1)で求めた誤差率を引いた値と定義した。予測
精度の定義式を式(2)に示す。予測画像全体の予測精度
は実測画像と対応する各ピクセルごとに予測精度を求
図 8. 減衰過程予測結果
め、その平均値とした。また、実測画像、予測画像共
に降水強度が 0 の部分は無視し予測精度を求めた。
表 2. 減衰過程予測精度評価
ER:誤差率
(1)
PA:予測精度
(2)
6.
自己回帰モデルによる予測
予測結果
本章では雨雲の発達過程、減衰過程についての結果
を示す。予測間隔はレーダーのサンプリングタイムで
ある約 6 秒である。先行研究においては自己回帰モデ
ルを 4 つのアルゴリズム(最尤法、Yule-Walker 法、
Burg 法、最小二乗法)により構成し、予測を行った。
6.1.
雨雲発達過程の予測結果
本節では雨雲の発達過程について予測結果を示す。
図 7 に予測画像、表 1 に先行研究 [4]との予測精度比
較を示す。表 1 に示すように、状態遷移を用いた期待
値予測は先行研究と比べ精度の高い予測を行うことが
できた。
6.2.
最尤法
88.66%
Burg 法
88.06%
Yule-Walker
86.35%
最小二乗法
76.53%
7.
期待値予測
89.29%
5 分後の予測
これまでは、予測時間を 6 秒としていた。しかし、
我々の研究目的は集中豪雨による被害を未然に防止す
ることである。そのためには、可能な限り長時間後に
おける降水強度の予測を行う必要がある。そこで本章
では予測時間を約 6 秒から約 5 分へ伸ばし予測精度を
求めた。予測には降水強度の最も強い部分を強調する
ため、状態遷移を用いた新たな予測アルゴリズムを提
案する。5 分後の降水強度を予測する際は状態遷移確
率の期待値を 50 ステップ先(WITH レーダーのサン
プリングタイムが約 6 秒であるため)まで求め 5 分後
の予測とする。
雨雲減衰過程の予測結果
状態遷移による予測
本節では雨雲の減衰過程について予測結果を示す。
-377-
7.1.
状態遷移を用いた新たな予測手法
まず、通常の状態遷移アルゴリズムにより 5 分後の
ータを用いて、状態遷移による降水強度の予測を行っ
た。ここでは、まず約 6 秒後の降水強度の発達過程、
予測を行うと降水強度の最も強い部分を確認すること
ができなかった。また、5 分後の予測を行う場合、雨
および減衰過程について予測を行った。5 章で説明し
た予測精度評価により先行研究と比較を行った結果、
雲が移動するため、予測精度が落ちる場合がある。そ
発達過程、および減衰過程の、どちらの場合について
こで、5 分後の降水強度を予測する際は降水強度の最
も強い部分を強調できるよう状態遷移則を変更する必
も先行研究と比べ精度の高い予測を行うことができた。
しかし、我々の研究目的は可能な限り長時間後にお
要がある。そこで、降水強度が時間とともに増加する
データに注目し、予測に用いる現在値の強度以上の値
ける集中豪雨の発生を予測することである。そこで、
予測時間を延ばし 5 分後における予測を行った。その
のみを用いて、状態遷移則を改良した。図 6 に示した
例においては、1 ステップ後予測値は 9 となり、2 ステ
際は雨雲の重心を定義し、基準となる重心座標へ雨雲
を移動させたサンプルデータを用いて、状態遷移図を
ップ後の予測値は 9 から予測が下がる 8 への状態遷移
作成した。また、降水強度の最も強い部分を予測する
を考慮しない。従って、予測値は
となる。このよう
に 50 ステップ予測を行い、5 分後の予測とする。
ため、予測直前の値以上への値のみの状態遷移を用い
て予測を行った。その結果、通常の状態遷移による予
また、予測する間に雨雲が移動する問題を解決する
ために雨雲の重心を定義し、基準となる重心座標へ雨
測では確認不可能な降水強度の最も強い部分を予測画
像中に確認することができた。また、通常の状態遷移
雲を移動させた上で、4 章で説明したように各ピクセ
を用いた予測と比べ予測精度を改善することを可能と
ルからの時系列データを基に状態遷移図を作成した。
雨雲の重心は、その画像の中で最も強い降水強度の座
した。今後は予測精度の向上および高精度の雨雲の重
心座標予測である。また、本研究においては最長で 5
標の平均とした。雨雲の重心座標を考慮した場合、予
測画像における雨雲は基準とした重心座標の位置へ出
分後における集中豪雨の予測を行った。しかし、突発
的な集中豪雨の対策を講じるためには、予測時間をさ
現する。そのため、予測したい時刻における雨雲の重
心座標へ移動させる必要がある。今回は重心座標は実
らに延長する必要がある。今後の我々の目標は、約 30
分後の集中豪雨の発生、推移を予測することである。
測値を用いた。
謝辞
7.2.
予測結果
本降雨データを提供していただいた(株)ウェザーニ
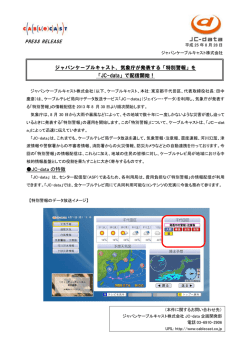
図 9 に予測結果を、表 3 に通常の状態遷移による
予測との予測精度比較を示す。図 9 から予測画像中に
降水強度の最も強い赤い部分を確認することができる。
また、表 3 から通常の状態遷移による予測と比べ予測
精度向上を達成できた。今後は予測時間を可能な限り
延ばし、より高精度な予測を行うことが課題である。
図 9. 5 分後予測結果
表 3. 5 分後予測精度比較
予測手法
予測精度
通常の状態遷移による予測
60.90%
状態遷移を用いた新たな予測
84.64%
8.
ューズ社に深く感謝申し上げます。
参考文献
1. 総務省消防庁. 島根県及び山口県の大雨の被害
状況等(最終報). 2013.
2. 総務省消防庁. 8 月 23 日から 28 日までの大雨等
による被害状況等について(第6報). 2013.
3. 手柴充博(ウェザーニューズ). WNI におけるレー
ダーの取り組み. 2012. 第 6 回 MU レーダー・赤道
大気レーダーシンポジウム.
4. 仲栄真言祈. 高分解能レーダー画像を用いた気
象予測モデルに関する研究. 2012. 修士(工学)学位
論文.
5. 深尾昌一郎・浜津享助. 気象と大気のレーダーリ
モートセンシング. 京都大学学術出版会, 2009.
6. 森本英典・高橋幸雄. マルコフ解析. 日科技連出
版社, 2000.
まとめと今後の課題
本研究では WITH レーダーから得られる時系列デ
-378-
© Copyright 2026 Paperzz