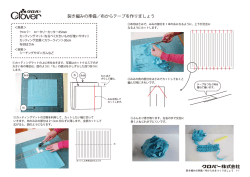
距離の測量 は斜距離 A(A'') A' A0 投影面 B 地表面 B'' 基準楕 B0 円体面 B' • 2地点AB間の距離とは水平距離のことで – 本来は基準楕円体表面の弧 – 実際の数値データは投影面に投影された – 実際の測量作業は地表面で行うので,B点を鉛 直にA点の標高に合わせたB''点を用いた →ただし,鉛直線偏奇のため とは限らない 174 直接距離測量(1) • 歩測(+歩度計) – 大まかな距離を測るため.誤測の確認など. – 精度は1/100~1/200程度. – 1歩の歩幅は0.75m程度.人により異なる. – 1複歩1.50m程度を1歩という場合もある. • 布巻尺・ガラス繊維テープ – 工事測量や平板測量など,高い精度を必要とし ない局所的な測量に用いられる. – 精度は1/1,000~1/5,000程度 175 直接距離測量(2) • 鋼巻尺 – かつて距離測量に最も一般的に利用されていた – 精度は1/10,000~1/100,000程度 – 幅10mm,厚さ0.5mm,長さ30~50m程度のテー プを用いた巻尺で,最小目盛は1mm. – 温度15Cで98Nの力で引張った値を標準とする – 測定値は以下の式で補正する 標高 たるみ 傾斜 張力差 温度差 尺定数 測定値 L Lm CC Ct C p Ch Cs Ce 176 直接距離測量(3) • 光波測距儀(optical distance-measuring device) 電磁波の範囲と主な用途 波長 電離放 射線 100nm 以下 周波数 名称 1017Hz以上 1016~1017Hz X線・ガンマー線 X線医療診断 紫外線(短い波長: 100nm以下) 非電離 400nm~100nm 1015~1016Hz 放射線 720nm~400nm 1014Hz 1mm~720nm 1012~1014Hz 10mm~1mm 30GHz~300GHz 30cm~1cm 1GHz~30GHz 10km~3cm 30kHz~10GHz 10km以上 30kHz以下 無限大 ゼロ 紫外線(長い波長) 可視光線 赤外線 ミリ波 マイクロ波 中波・短波・VHF等 低周波電磁波 直流電磁界 主な用途 赤外線ストーブ 今後の電気通信 電気通信 テレビ・ラジオ放送 電力 磁石 177 直接距離測量(4) • 光波測距儀(続き) 波長 10km~3cm 周波数 名称 主な用途 30kHz~10GHz 中波・短波・VHF等 テレビ・ラジオ放送 – 光波測距儀は電磁波の波長帯を利用する – 精度は±(5+5L)mm程度(Lは測定距離[km]) – 距離の測定に使用する電磁波の波長は,数十kHz ~数十GHz程度で,中波・短波・VHF等電波相当 – 電波法の規制により,この範囲の波長は使用不可 高周波変調光という光波を用いる 光に107回/s程度の明暗を加えて電波相当の周波数 を作り出して発射する(うねりの原理を利用) 178 直接距離測量(5) 光波測距儀による測距原理 位相比較法 距離: L 波長: 位相計 反射鏡 j 測るものは変調光の位相 A B 179 直接距離測量(6) m と がわかれ ばLはわかる! 180 直接距離測量(7) • 位相比較法の考え方 – 波長の異なる複数の変調光を用いる. 181 直接距離測量(8) • 位相比較法の例 – (1) f1 =75kHz とすると,1 4,000mとなり,測定距 離 L が2,000mよりも短いことが保証されていれば 距離 L が直接測れる.ただし,位相差計の分解 能が1/1,000程度考えると,最大誤差は2m程度 – (2) f2 =1.5MHz とすると,2 200mとなり,上記最 大誤差2mよりも短いことが保証され,最大誤差 0.2m程度で距離 L が測れる. – (3) 同様に, f3 =30MHz とすると,3 10mとなり, 最大誤差1cm程度で距離 L が測れる. 182 直接距離測量(9) • 光波測距儀の測定値の補正 L Lm CC Cd C p L ( a bL) a Cd C p bL CC – L: 補正された値 a: 距離の長短に関係しな い誤差で,測定器や反 – Lm: 測定値 射鏡の機械固有のもの – CC: 気象補正値 b: 測定距離に比例する誤 – Cd: 器械定数(補正値) 差で変調周波数の安定 – Cp: 反射鏡定数(補正値) 度や大気の屈折率の不 規則な変化によるもの 183 直接距離測量(10) 184 直接距離測量(11) 185 直接距離測量(12) 測距儀中心 プリズム位置 反射鏡中心 光波発射位置 測距儀 反射鏡 測定値: Lm Cd Cp 正しい距離 L=Lm+Cd+Cp 186 直接距離測量(12) 187 直接距離測量(13) 188 間接距離測量 • スタジア測量 – トランシットやレベルの望遠鏡に刻まれたスタジ ア線と呼ばれる一定間隔の2本の横線に挟まれ る標尺の長さを目盛で読み取り,標尺までの距 離を計算で求める方法.S Kl C , K f , C c f i – 精度は1/300~1/1000程度. 標尺 189 VLBI(Very Long Baseline Interferometry)測量 – 準星から電波を利用して大陸間の距離などを測る. – プレート運動の検知,GPS測量の基準付与 190 GPS測量(1) • Global Positioning System – アメリカによって,航空機・ 船舶等の航法支援用として 開発されたシステム – 上空約2万kmを周回する GPS衛星,GPS衛星の追跡と 管制を行う管制局,測位を 行うための利用者の受信機 で構成 55度傾いた6つの軌道 – 座標形はWGS-84⇔GRS-80 191 GPS測量(2) • GPS測量 – 単独測位(1点測位) • カーナビ用.30~100mの誤差 – 干渉測位 • スタティック測位(静的干渉測位) • キネマティック干渉測位 • リアルタイムキネマティック測位 固定局と移動局 誤差1~2cm程度 – 時刻同期 • 位置ではなく時刻を測る 192 距離測における標高差補正 • 距離 Lが,標高 Hで測 るとLmになってしまう. R=6,378,000 m H=800 m,Lm=100 mのとき,Ce=-1.3cm 193 角測定(1) ・点Oから2点P, Qを視準 ・測定するものは =∠P'OQ' ・: 鉛直角または高度角 仰角または俯角 ・Z: 天頂角 ・∠POQ: 斜角という 水平面 望遠鏡高さ 測量学では,鉛直角を高精度で測るニーズはない! 器械高さ,プリズム高さが大きな誤差を持つため 194 角測定(2) • 角の単位 – (1) 度分秒 – (2) グラード ほとんどこれを用いる ヨーロッパでよく用いられる 例 195 角測定(3) – (3) 弧度 理論計算に必要 196 測角儀 • トランシット(transit) • セオドライト(theodlite) p.56 工学的,普通精度,米発 理学的,高精度,欧発 – 現在はほぼ同義語 – 光波測距儀と一体化したものをトータルステーショ ンという. – 構造は「複軸式(本当は軸は1つで盤が複数)」 • 上盤と下盤がありそれぞれに固定ネジと微動ネジがある • 水平目盛は下盤に刻まれていて,上盤には針がある – 上盤だけを回転させると目盛が変化する – 下盤と上盤を同時に回転させても目盛は変化しない 197 水平角測定の方法 トランシットは,レベルとは異なり,整準と求心を同 時に行う必要があり,設置に時間がかかる. 観測点,視準点は,国家三角点,公 共測量の成果点,自ら設けた他の観 測点(図根点,トラバース点など),位 置が特定できるものを用いる. • 望遠鏡の向き – 正位と反位 • 観測する方向 – 時針方向と反時針方向 198 角測定法 • 単測法 • 倍角法 視準+読取 視準のみ 視準+読取 199 偏心観測の基本式 • • • • 公式(a) 公式(b) 公式(c) 公式(d) 1 2 3 4 図-1で x sin y y sin x z x 2 y 2 2 xy cos z z x cos y y cos x 図-1 図-2で 図-2 200 偏心観測(1) 条件: 角度a を知りたいが,点Aから点P,Qを同時 に視準できなかったため,器械を点Aから点Bに移動 • 器械位置が偏心した場合 – S1,S2の概略の値は既知 – d1,d2および e は微小 – 知りたいものは角a – 測定するものは角a' ,j, および距離e 201 偏心観測(2) 202 偏心観測(3) 基本は変わらないが,偏心させる方向が変わると, j → 2p-j となるが,途中式を除き最終結果は不変. 203
© Copyright 2026 Paperzz