2003 年度 卒 業 論 文
災害時における
災害時における
避難経路動的設定シミュレーション
避難経路動的設定シミュレーション
指導教員:藤澤 公也 講師
メディア学部 モデリング&シミュレーションプロジェクト
学籍番号 00p176
小松 祥平
2004年3月
2003 年度
卒
業
論
文
概
要
論文題目
災害時における避難経路動的設定シミュレーション
メディア学部
氏
学籍番号: 00p176
名
キーワード
小松
祥平
指導教員
藤澤
公也
講師
災害、避難、経路、マルチエージェント、シミュレーション、最適化
本研究の目的は災害発生時の状況から最も安全な避難経路を導き出し、円滑な避難行動
を支援することである。導き出した最適避難経路の有効性を確認するため、検証用避難行
動シミュレータを制作する。今回は災害の具体例として建築物内部の火災を対象とする。
最適避難経路動的設定の有効性が認められた場合、他災害、建築物外部の避難、交通渋滞
など災害以外の分野への応用も期待できる。
避難行動シミュレータの実装には構造計画研究所の「マルチエージェントシミュレータ」
を用いた。これは自律的に行動するエージェントの相互作用で進行するシミュレータであ
る。
最適避難経路は避難経路を重み付きグラフで表現し最短経路問題として解く。解法アル
ゴリズムにはダイクストラ法を採用した。単に道のりだけから避難経路を計算するのでは
なく、出火位置と各ノード間の距離から危険度パラメータを定義して重みの計算に使用し
た。
最適避難経路動的設定プログラムは実装に至らなかったため、手作業による計算で最適
避難経路を導出し、避難行動シミュレータによる検証実験を行った。実験方法はふたつの
出火位置でそれぞれ最適避難経路動的設定を適用した場合、しなかった場合についての避
難行動シミュレーションである。
避難行動シミュレータ単体の信頼性が最適避難経路動的設定プログラムの信頼性を測る
上で重要であるが、検証の結果信頼できるものであると結論付けた。本研究の最適避難経
路動的設定方法により得られた最適避難経路は検証の結果、出口から出火するなど比較的
危険性の高い状況において高い効果を発揮することがわかった。
目次
第1章
はじめに ............................................................................................................... 1
第2章
避難経路最適化について...................................................................................... 2
2.1
迅速な避難行動の重要性 ......................................................................................... 2
2.2
最適避難経路の導出................................................................................................. 2
2.3
避難に関連する法律................................................................................................. 3
2.4
過去の研究事例........................................................................................................ 3
2.4.1
避難経路の明解性を定量化する試み................................................................ 3
2.4.2
避難経路最適化................................................................................................. 4
第3章
最適避難経路動的設定方法 .................................................................................. 5
3.1
最短経路問題............................................................................................................ 5
3.2
地図データのグラフ化 ............................................................................................11
3.3
危険度パラメータを用いた移動コストの算出 ...................................................... 12
3.4
避難経路動的設定プログラムの実装 ..................................................................... 13
第4章
避難行動シミュレータ ....................................................................................... 15
4.1
マルチエージェントシミュレータ概要 ................................................................. 15
4.2
シミュレータ上における避難行動のモデル化 ...................................................... 15
4.2.1
空間のモデル化............................................................................................... 15
4.2.2
避難者エージェントのモデル化 ..................................................................... 17
4.2.3
火エージェントのモデル化 ............................................................................ 20
4.2.4
その他の行動しないエージェント ................................................................. 20
第5章
5.1
最適避難経路動的設定の検証実験 ..................................................................... 22
避難行動シミュレータ単体の検証実験 ................................................................. 22
5.1.1
検証実験の方法............................................................................................... 22
5.1.2
実験結果.......................................................................................................... 23
5.1.3
結果の考察...................................................................................................... 24
5.2
避難経路動的設定プログラムの検証実験.............................................................. 26
5.2.1
検証実験の方法............................................................................................... 26
5.2.2
実験結果.......................................................................................................... 29
5.2.3
結果の考察...................................................................................................... 31
5.3
第6章
最適避難経路動的設定に関する考察 ..................................................................... 33
おわりに ............................................................................................................. 34
謝辞....................................................................................................................................... 36
参考文献 ............................................................................................................................... 37
付録 A モデル空間における危険度の算出........................................................................... 38
i
付録 B 避難行動シミュレータ検証結果 .............................................................................. 44
ii
第1章
章 はじめに
日本は世界でも有数の災害大国である。これは地震、台風などの自然災害の発生数が多い
ために言われていることであるが、ただ単に災害の発生数が多いだけでなく日本の主要都
市の構造にも一因があるのではないかと考えられる。日本の都市は非常に人口密度が高く、
東西南北だけでなく上下にも都市構造が広がっている。このような地域で災害が発生すれ
ば甚大な被害を受けることは避けられない。
災害の発生を未然に防ぐことが出来れば理想的であるが、自然災害は未だ予測不可能で
ある。発生を未然に防げそうな災害のひとつである火災においても、人為的ミスによる失
火や、避難施設、消火設備の不良などをゼロにすることは不可能である。これは、どんな
に技術が進歩しようとも飛行機事故が無くならないのと同じで、人間が関わっている限り、
なくならない問題である。
本研究では災害による人的被害を抑制するために、円滑な避難行動を支援する試みについ
て研究する。対象とする災害は建造物火災である。検証実験用の避難行動シミュレータを
制作する。
先に述べた日本の災害発生数の高さ、複雑な都市や建築物の構造に起因する避難行動の遅
延、災害発生の完全な予防が不可能な点などからも、万が一災害が発生した場合に円滑な
避難行動を支援することを研究するのは意義のあるものであると考える。
1
第2章
章 避難経路最適化について
避難経路最適化について
2.1
迅速な
迅速な避難行動の
避難行動の重要性
災害による人的被害抑制の最重要要素は迅速な避難行動にある。迅速な避難行動を行う
ためには、何よりも、避難者が冷静かつ適切な判断で行動しなければならない。しかし、
避難時に迅速な避難行動を妨げる障害がいくつかある。
ひとつ目は避難経路の構造である。大都市圏においては高層ビル、地下鉄駅など建築物
そのものが複雑な構造をしているため避難経路の構造も複雑化している建築物が少なくな
い。単純な構造の建築物であったとしても、毎日利用しているような施設でない限り、す
ぐに全体の避難経路構造を把握することは不可能である。
ふたつ目に挙げられるのは避難者自身の心理である。状況が逼迫すればするほど避難者
には心理的な余裕がなくなる。避難者個々の心理だけでなく、集団心理により冷静さを欠
いた行動を起こすことも多くなる。
また、避難施設、消火設備の不備も問題となっている。例を挙げると、避難はしごや消
火器などが設置されていないことや、設置してある場合でも整備不良の状態であることや
さらには廊下の荷物が邪魔をして防火扉が閉まらないことなどである。
避難者に冷静、適切な判断をさせるためには、不安材料を可能な限り取り除かなければ
ならない。これらの障害に対する明瞭かつ有効な解決策は、避難者に明解な避難経路を提
示することである。
2.2
最適避難経路の
最適避難経路の導出
明解な避難経路とはどのようなものだろうか。一言で言えば、判断を避難者に委ねるこ
とのないような避難経路である。避難者の置かれた心理状況を考えれば、状況判断におい
て避難者が間違った判断を下す可能性があることは容易に想像がつく。むしろ、避難行動
時という状況においては、避難者は往々にして間違った判断を下すと考えたほうが良い。
避難者が判断を迫られる場所、つまり避難経路が分岐している場所で出口への正しい避
難経路を逐一示すことができれば、避難者はその指示に従うだけで安全に避難することが
できる。
2
本研究では正しい避難経路を最適避難経路として数学的に導き、避難者に指示すること
で避難者の心理的不安を取り除き、冷静な避難行動を支援する。ここで言う「正しい避難
経路」とは、避難経路に求められる安全性を最重要条件とした避難経路のことである。
本研究の目的は、災害発生時の状況を取得した上で、最も安全な避難経路を導き出すこと
である。また、本研究の有効性を確認するため、検証用避難行動シミュレータを制作する。
研究目的へのアプローチとして、最適避難経路を自動的に出力するプログラムを制作する。
以下、このプログラムを「最適避難経路動的設定プログラム」と呼ぶ。このプログラムに
より、災害時の迅速な避難行動を支援する。今回は災害の具体例として建築物内部の火災
を対象とする。このプログラムの有効性が認められた場合、他の災害や建築物外部の避難
への適用や交通渋滞など災害以外の分野への応用も期待できる。
2.3
避難に
避難に関連する
関連する法律
する法律
日本の法律の中では、建築基準法において避難施設に関する記述[1]がある。建築基準法
では、ある一定の基準以上に大きい建築物、その他定められた用途に用いる建築物の避難
施設(廊下、階段、出入り口など)について「各階には階段を 2 以上設置しなければなら
ない(建築基準法施行令第 121 条)」と定められている。これにより、これらの建築物は 2
つの避難経路を確保しなければならないことが分かる。ほかに避難経路について具体的な
規定は定められていない。
2.4
過去の
過去の研究事例
2.4.1 避難経路の明解性を定量化する試み
野竹らによる「避難距離期待値を用いた避難経路の明解性の評価に関する研究」[2]は、
避難経路の明解性(複雑さ)の指標を提案している。従来このような指標を算出する際、
最短経路しか考慮されていなかったことを踏まえ、この研究では「避難距離期待値(ETD)」
および「平均避難距離期待値(AETD)」を元にした指標を提案している。結果として、通
路総延長、出口の次数の和、ノード数を用いた AETD の略算式導出の可能性が認められた。
この研究では、比較的簡単な計算から避難経路の明解性が導ける可能性を示している。避
難時のように特別な状況下では経路の単純さが供する利益は大きい。しかし、これは建築
物の設計段階で考慮されるべき事であり、すでにある建築物の避難のしやすさを改善する
3
ために利用することは難しい。
2.4.2 避難経路最適化
「GIS を用いた避難経路のシミュレーション」[3]は穴田らによる研究である。2500 分の 1
都市計画基本図をもとに GIS(Geographic Information System:地理情報システム)ソフトを
用いてデジタル地図を作成する。任意の場所から避難地まで、各道路の安全度を算出して
得た最適な避難経路と、最短距離を取る最短経路を出力し、両経路の比較を行う。
この研究は建築物の敷地外の避難経路を扱っている。結果として 2 つの避難経路を出力す
るものの、どちらが本当に最適な経路なのか、ということについては触れられていない。
シミュレータなどを使って、避難経路の安全性を評価することが課題として残っている。
4
第3章
章 最適避難経路動的設定方法
3.1
最短経路問題
最適避難経路を求めるために、避難経路を最短経路問題として扱う。最短経路問題とは、
重み付きグラフの任意の2頂点を結ぶ経路の中から、辺の重みの総和が最小となる経路を
求める問題である。最短経路問題の解法アルゴリズムとしては A*(エースター)法、Dijkstra
(ダイクストラ)法などが有名である[4]。本研究ではダイクストラ法を採用する。
ダイクストラ法はエズガー・ダイクストラ(Edsger Wybe Dijkstra)が考案した最短経路問
題の解法アルゴリズムである。出発点から目的地への最短経路を求める過程で、出発点か
ら他の全ての頂点への最短経路が求まるという特徴がある。
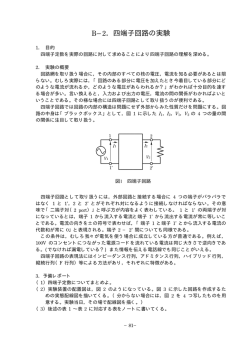
ダイクストラ法による最短経路問題の解法手順フローチャートを図 3-1 に示した。任意の
1 点からグラフ内にあるすべてのノードへの最短距離を求める。まず最短経路探索の始点を
定め(図 3-1 の①)、始点から始点への距離は 0 として確定する(図 3-1 の②)。
始点からの最短距離が確定していないノードはないか調べる(図 3-1 の③)。すべてのノー
ドについて視点からの最短距離が確定している場合は終了する。未確定のノードがある場
合は、最後に確定したノードに接続しているノードの集合を作り、始点からの最短距離を
調べるループに入る(図 3-1 の④)。このループを抜ける条件は「集合 N のノード数が 0 であ
る」とする(図 3-1 の⑤)。ループ内では最後に確定したノードを n、n と接続している未確
定のノードの集合を N と呼ぶ。
まず集合Nからノードを 1 つ取り出しノード a とする(図 3-1 の⑥)。
「始点から a への仮の
最短距離」と「始点と n 間の最短距離+n と a 間の距離」を比較し(図 3-1 の⑦)、後者の方
が小さかった場合はこの値を新たに a の仮の最短距離とする(図 3-1 の⑧)。集合 N から a
を取り除き、ループの先頭に戻る(図 3-1 の⑨)。
ループを抜けた後、始点からの最短距離が未確定のノードの中で仮の最短距離が最小であ
るノードについて、仮の最短経路を始点からそのノードへの最短距離として確定する(図
3-1 の⑩)。
この手順に従って始点からの最短距離を各ノードに対して確定していき、始点からすべて
5
のノードへの最短距離が確定したところで計算を終了する。
開始
始点を定める(①)
最後に確定したノードnに
接続している未確定のノードの
集合Nを作る(④)
始点から始点への距離=0
始点から始点への最短距離を
0で確定する(②)
No
始点からの
最短距離が
未確定のノードは
あるか?(③)
集合Nの
ノード数が0である(⑤)
Yes
No
集合Nからノードを1つ
取り出しaとする(⑥)
Yes
終了
aの仮の最短距離 >
始点とn間の距離 +
nとa間の距離(⑦)
No
Yes
aの仮の最短距離を
始点とn間の距離 + nとa間の距離
に更新する(⑧)
集合Nからaを取り除く(⑨)
始点からの最短距離が未確定の
ノードの中で
仮の最短距離が最小のノードについて、
始点からの最短距離を
現在の仮の最短経路で確定する(⑩)
図 3-1 ダイクストラ法
ダイクストラ法フローチャート
6
以下に例を挙げて、最短経路問題をダイクストラ法で解く手順を示す。図 3-2 のグラフに
おける点 A-D 間の最短経路を求める。図 3-2 において、丸印はノードを示し、中のアルフ
ァベットは各ノードを識別するためのラベルである。ノード間を結んだ直線がエッジを表
し、エッジに添えられた数字がそのエッジの重みである。重みはノード間の距離に限定さ
れるわけではないが、ここでは重みとして 2 点間の距離を使っている。
ラベル
5
E
A
ノード
3
1
4
C
1
重み
2
エッジ
B
D
図 3-2
まず始点 A から各点への距離を各点の上部に表示する。始点 A から点 A 自身への距離は
0 である。始点 A と接続している各点の上部には、点 A と接続しているエッジの重みを「仮
の最短距離」として表示する。点 A と直接接続していない点は仮の最短距離を∞(無限大)
としておく。
仮の最短距離の中で最小のものを始点 A からその点への最短距離として確定する。始点 A
からの最短距離が確定した点は黒で塗りつぶすことにする。点 A は最短距離 0 で今仮の最
短距離がわかっている点 A, B, C, E の中で最も小さいため、始点 A から点 A への最短距離
は 0 で確定する。仮の最短距離がわかった点は灰色で塗りつぶす。ここまでの状態を図 3-3
に示す。
7
仮の最短距離
(ノードの中の色が黒以外)
確定したAからの最短距離
(ノードの中の色が黒)
5
0
5
E
A
3
3
1
4
C
1
2
1
∞
B
D
図 3-3
次は最短距離を確定した点から接続している各点への距離を調べる。今確定した点 A は
接続している点への距離を先ほど調べたので、この時点で新たに仮の最短距離がわかる点
はない。仮の最短距離が一番小さな点を探すと、ここでは点 B が最小である。始点 A から
点 B への最短距離を 1 で確定する(図 3-4)。
5
0
5
E
A
3
3
1
4
C
1
2
1
∞
B
D
図 3-4
確定した点 B と接続している点を探す。この場合は点 C が該当する。始点から点 C への
8
最短距離は 3 となっているが、点 B を経由すれば最短距離は 2 となるので、始点 A から点
C への仮の最短距離を 2 に更新する(図 3-5)
。
5
0
5
E
A
3
2
1
4
C
1
2
1
∞
B
D
図 3-5
この状態で始点 A からの仮の最短距離が最小である点 C への最短距離を 2 で確定する。
確定した点 C は点 D と接続している。ここで点 D について、始点 A から点 D への仮の最
短距離を 4 に更新する(図 3-6)。
5
0
5
E
A
3
2
1
4
C
1
2
1
4
B
D
図 3-6
9
未確定の点の中で始点 A からの仮の最短距離が最小の点は点 D であるから、始点 A から
点 D への最短距離を 4 で確定する(図 3-7)。
5
0
5
E
A
3
2
1
4
C
1
2
1
4
B
D
図 3-7
確定した点 D は点 E と接続しているが、始点 A から点 E への仮の最短距離は始点 A から
の 5 である。点 D を経由すると 4+4=8 となり、始点 A から点 E への仮の最短距離は 5 のま
(図 3-8)。
ま変わらない。
始点 A から最後に残った点 E への最短距離は 5 で確定して終了する
5
0
5
E
A
3
2
1
4
C
1
2
1
4
B
D
図 3-8
10
以上、点 A-D 間の最短経路は[A-B-C-D]で距離は 1+1+2=4 となることがわかった。また、
この問題を解く過程で点 A から全ての点への最短距離が求まることもわかった。
3.2
地図データ
地図データの
データのグラフ化
グラフ化
最短経路問題として扱うためには、避難経路の構造をグラフとして表すことが必要である。
グラフを作成するためにはまず、実在する建築物の建物構造を避難行動シミュレータで扱
うことが出来るよう、建築物のフロアをモデル化したモデル空間(図 3-9)をフロア図面か
ら作成する。次にモデル空間からグラフ(図 3-10)を作成する。図 3-9 は実在する建築物
1 フロアの図面を元に避難行動シミュレータ上に作成したモデル空間の平面図である。図
3-10 はモデル空間の出口と交差点の接続関係を表したグラフ図である。図中の丸型のノー
ドは交差点を、矩形のノードは出口を表している。ノード内のアルファベットは各ノード
を識別するためのラベルである。エッジが接続しているノード同士は直接行き来すること
ができる。
図 3-9 モデル空間平面図
モデル空間平面図
11
A
B
O
P
C
Q
D
R
E
F
:出口
:交差点
G
H
I
J
S
T
L
K
M
N
図 3-10 モデル空間
モデル空間を
空間をグラフ化
グラフ化した図
した図
本研究で扱うグラフ G = ( N , E ) において、各ノードはそれぞれユニークなラベルを持つ。
各ノードは本研究の特徴的な値として、出火地点からの直線距離 d を持つ。この値によっ
て、このノードがどの程度危険にさらされているかがわかる。
グラフに任意のノード u, v {u , v}∈ E (G ) があるとき、エッジは接続ノード間の距離
w(u, v ) を持つ。この距離と後述する危険度パラメータの積が実際の経路探索に使う重みと
なる。この重みのことを移動コスト C (u , v ) と呼ぶ。
3.3
危険度パラメータ
危険度パラメータを
パラメータを用いた移動
いた移動コスト
移動コストの
コストの算出
移動コストを算出するため危険度パラメータを定義する。危険度パラメータ D (u , v ) は任
意のエッジに接続しているノードの「出火点からの直線距離の積の逆数」(3-1)とする。
d u , d v はそれぞれノード u , v の出火位置からの直線距離である。
12
D(u , v ) =
1
····································································································( 3-1 )
du ⋅ dv
最終的なコストは「ノード間の距離と危険度パラメータの積」(3-2)とする。
C (u, v ) = w(u, v ) × D(u, v ) ·····················································································( 3-2 )
これらの計算により求めた移動コストの総和が最小となる経路を最適避難経路とする。
3.4
避難経路動的設定プログラム
避難経路動的設定プログラムの
プログラムの実装
以上に述べた方法により最適避難経路を自動的に設定するプログラムの制作を当初は予
定していた。しかしながら、プログラムの実装までには至らなかった。そのため、本研究
では最適避難経路を手作業によって、ダイクストラ法を用いて導出している。以下は避難
経路動的設定プログラムで予定していた実装方法である。
避難経路動的設定プログラムはモデル空間内の出火位置、各交差点、出口間の距離関係を
調べ、危険度パラメータと最終的な移動コストを算出し、各交差点に配置すべき避難経路
案内板を選定し、実際に配置したデータを避難行動シミュレータ上で直接読み取れる形で
出力する、この一連の作業を自動的に実行するプログラムである。
避難行動シミュレータのベースであるマルチエージェントシミュレータは空間内のエー
ジェント配置を CSV(カンマ区切りテキスト)ファイルで簡単に入力することができる。
CSV ファイルは表計算ソフトなどでよく用いられている形式である。そのため最適避難経
路動的設定プログラムにおいてもデータの入出力は CSV ファイルを使う。
モデル空間をグラフ化するのは自動では難しく、煩雑な手順が必要になると思われる。そ
こで、グラフにおける各ノードの接続関係は隣接マトリクスという行列を手動で作成する。
表 3-1 は隣接マトリクスの例で、図 3-2 における各ノードの接続関係を表している。ノー
ド A からノード E について、それぞれどのノードと接続しているか、接続している場合は
1、接続していない場合は 0 を記入する。対角成分となる自分自身はどちらに見なしても良
いがここでは 0 としてある。1 を記入する代わりにエッジの重みを記入すれば、接続関係と
エッジの重み両方を 1 つの行列で表すことが可能である。
13
対角成分に対して対称となっていることも特徴である。これは、この隣接マトリクスで表
されるグラフが無向グラフであるか、または有向グラフで全てのエッジが両方向に接続し
ている状態を表している。
表 3-1 隣接マトリクス
隣接マトリクスの
マトリクスの例
A
B
C
D
E
A
0
1
1
0
1
B
1
0
1
0
0
C
1
1
0
1
0
D
0
0
1
0
1
E
1
0
0
1
0
隣接マトリクスならば 2 次元配列でデータを保持することができ、計算量は多いが分かり
やすいアルゴリズムでプログラムを作成することができる。
14
第4章
章 避難行動シミュレータ
避難行動シミュレータ
4.1
マルチエージェントシミュレータ概要
マルチエージェントシミュレータ概要
シミュレータの構成要素のうち、特に自律的に行動するものをエージェントと呼ぶ。複数
のエージェント同士の相互作用によってシステム全体の流れが生まれ、全体の流れがエー
ジェント個体の動きを決定付ける。この循環プロセスによってシミュレーションが進行す
る。このようなエージェント指向の考え方を取り入れたシミュレータのことをマルチエー
ジェントシミュレータ、またはエージェントベースドシミュレータと言う。
本研究では構造計画研究所[5]制作の「マルチエージェントシミュレータ」[6]を用いて避
難行動シミュレータを制作する。
4.2
シミュレータ上
シミュレータ上における避難行動
における避難行動の
避難行動のモデル化
モデル化
4.2.1 空間のモデル化
空間をモデル化するに当たり、シミュレータ内の単位を定義する。1セル当たりの大きさ
は一辺あたりの長さが 50 センチメートルの正方形とする。また、1ステップ当たりの時間
経過は 0.5 秒とする。これは「避難者エージェントは 1 セルに 1 体のみ」、
「避難者エージェ
ントは 1 ステップに 1 セルだけ移動できる」という条件と、人間の歩行速度を平均 1m / sec .
としたときの関係性から妥当性のある数字を選択した。
避難者と火エージェントの全ては 1 ステップに 1 回行動する。
シミュレーション開始時の想定状況は、何らかの要因により炎が上がり、煙または熱感知
式の火災報知器が作動、警報が発報した瞬間を想定している。つまり、全ての避難者エー
ジェントは直ちに避難しなければならないことを理解していると想定する。シミュレーシ
ョン終了条件は「空間内の避難者エージェント数が 0 になる」である。
シミュレータは「二次元表示マップ」(図 4-1)、「避難者数推移グラフ」、「数値出力ウィ
ンドウ」(図 4-2)「コントロールパネル」(図 4-3)を画面上に出力する。
二次元表示マップは現在のモデル空間内の様子を表示する。避難者数推移グラフは空間内
の残存避難者エージェントの人数、避難成功者数、避難失敗者数の推移をグラフ化して表
示する。数値出力ウィンドウはシミュレーションのステップ数、残存避難者数、避難成功
15
者数、避難失敗者数をリアルタイムに表示する。
コントロールパネルはシミュレーションの制御、パラメータの設定を行う。シミュレーシ
ョンの制御でできることは「開始」、
「停止」、
「一時停止」、
「1 ステップ実行」の 4 通り、コ
ントロールパネルで設定できるパラメータは 4 つあり、
「初期配置避難者数」は 0~100 人ま
で、
「空間延焼確率」と「壁延焼確率」は 0~0.3、
「避難者の視界」は 0~5 までをそれぞれ設
定できる。
図 4-1 二次元表示マップ
二次元表示マップ
図 4-2 避難者数推移グラフ
避難者数推移グラフと
グラフと数値出力ウィンドウ
数値出力ウィンドウ
16
図 4-3 コントロールパネル
コントロールパネル
シミュレーション終了時には自動的にログファイルを生成する。ログファイルには「実行
No.」
、「シミュレーション終了時間(ステップ数)」
「避難成功者数」
「避難失敗者数」「残存
避難者数」を記録する。
4.2.2 避難者エージェントのモデル化
目的地探索
避難者エージェントの移動アルゴリズムを説明する。避難者エージェントの移動目的は避
難であるから、最終目的地は出口である。しかし任意の 1 地点から出口が必ず見えるとは
考えづらい。そこで、出口以外にドア、廊下、交差点の 3 種類の目的地を便宜的に定める。
次に、避難者エージェントが目的地を探す手順について述べる。避難者エージェントの視
界はエージェント自身を中心に上下左右 4 方向に対して無限遠、
具体的には地図平面の端、
もしくは壁にぶつかるまでとする。1 方向に対しては幅 1~11 セルの視界幅を持つ。
図 4-4 は視界幅 2 セル、避難者エージェントが上向きの場合の視界を図にしたものである。
視界幅を 2 セルとした時、実際に探索する幅は各方向に対して自身を中心とした左右 2 セ
ル、つまり 2 × 2 + 1 = 5 セルとなる。図中、濃く塗りつぶしてある丸は避難者エージェント
自身、三角形に白抜きしてある丸は探索の基準セル、白抜き丸は探索可能な位置にある目
的地エージェント、白抜きに×印のある丸は探索不可能な位置にある目的地エージェント
を表す。また、灰色の四角形は壁エージェントの配置してあるセルを表している。上と右
側は探索基準のセルに壁エージェントがないので図中では探索を終了せず、さらに外側へ
探索を続ける。
左側は途中壁エージェントにより阻まれているため 1 回の探索で終了する。
17
避難者エージェントは場合によって探索する方向を限定する。図の場合は自身の背後を除
いた 3 方向を探索している。これが最も基本的な探索方向である。探索方向を限定する場
合、または 4 方向全てを探索する場合については後述する。
避難者エージェント
壁エージェントの有無をチェックするセル
探索基準セル
探索可能な位置にある目的地エージェント
探索不可能な位置にある目的地エージェント
壁エージェント
図 4-4 避難者エージェント
避難者エージェントの
エージェントの視界
避難者エージェントは自身の視界範囲内にある目的地候補をコレクションとして保持す
る。目的地候補コレクションの中から各種類について最も近い位置にあるエージェントを
取り出す。目的地候補コレクションの中に出口が存在すれば、そのうちで最も近い出口が
目的地となる。出口がない場合はまずドアと廊下の距離関係から自身が部屋の内側、外側
どちらにいるか判断する。具体的にいえば、廊下よりもドアのほうが近ければ避難者エー
ジェントは部屋の中にいると判断する。部屋の中にいればドアが目的地になる。
部屋の外、つまり廊下にいて交差点が見つかっている場合は交差点のコレクションからラ
ンダムに選択した 1 交差点を目的地とする。交差点についてのみ避難者エージェントは既
に通った点、以前目的地として選んだ交差点を記憶しており、ランダムに交差点を選択す
る時、避難者エージェントはまだ通ったことのない交差点を選ぶ。交差点を目的地として
歩いている場合、避難者エージェントは自身の向きに対して左右 2 方向に出口を探索しな
18
がら歩く。この場合探索の対象となる目的地は出口のみである。
避難経路案内板はほとんどの場合交差点と同じセルに設置してある。最適避難経路が設定
されている場合には単方向を指示する。最適避難経路が設定されていない場合は標準避難
経路を指示している。標準避難経路は避難経路案内板の位置によって単方向である場合も
複数方向である場合もある。避難者エージェントは避難経路案内板を見つけたら、案内板
の指示する方向を無条件に選択する。複数方向の指示があった場合はそのうちからランダ
ムで選択する。ただし、避難経路案内板だけは避難者エージェントの視界幅に関わらず、
避難者エージェントと隣接したセルしか探索することが出来ない。そのため、目的地の交
差点に到着していながら避難経路案内板を見落とすという可能性はゼロではない。避難経
路案内板を見た避難者エージェントは向きを変えた後、その 1 方向についてのみ目的地探
索を行う。
目的地候補がひとつも見つからなかった場合は目的地なしのままランダムに移動する。目
的地なしの避難者エージェントは 4 方向全てに対して目的地を探索することが出来る。
避難者エージェントは目的地を一度決めたら、到着するまでその目的地を記憶している。
しかし何らかの要因で目的地へ近づくことができなかった場合に備えて、一定時間が経過
したら目的地を一旦忘れて再び目的地探索を行うようにした。目的地へ近づくことができ
ない要因の多くは目的地探索ならびに目的地への経路選択アルゴリズムにある。
火を見つけたときの対処
避難者エージェントは視界に火エージェントを捉えると、もしその時の目的地が火の見え
た方向と同じであった場合はその目的地への移動を中止し、火の無い方向に新たな目的地
を探す。
その他の状態
避難者エージェントは自身の目的地が定まっていない時、他の避難者エージェントと同調
して動こうとする。具体的には、直近の避難者エージェントと同じ方向へ移動する動きと、
4 方向のうち避難者エージェントが多くいる方向へ向かう動きがある。
避難者エージェントの移動したセルに出口エージェントが設置されていた時、その避難者
19
エージェントは避難に成功したとみなし、避難成功者数に 1 加算し空間から取り除かれる。
避難者エージェントが自身の近傍 5 セル以上を火エージェントに囲まれた時、その避難者
エージェントは避難行動に失敗したとみなされ、避難失敗者数に 1 加算し空間から取り除
かれる。
4.2.3 火エージェントのモデル化
火エージェントは毎ステップ延焼を試みる。火エージェントの周囲 8 近傍のうち火エージ
ェントが 6 個未満であった場合、一定の確率で空間セル 1 セルに火エージェントを生成す
る。延焼確率は壁エージェントのセルと空間セルで分かれており、それぞれ随時変更が可
能である。延焼を試みるのは 1 ステップ毎に 1 回のみである。
全てのセルは可燃物であると想定し、火エージェントが生成されてから 50 ステップでそ
のセルは焼き尽くされたと判断する。焼き尽くされたセルは火エージェントを取り除き、
焦げエージェントを生成する。
4.2.4 その他の行動しないエージェント
壁エージェントは壁を表す。避難者エージェントは、壁エージェントの配置されているセ
ルには移動できない。壁エージェントの材質は全て一様であるとし、火エージェントの延
焼確率は一定である。壁エージェントは不透明で、避難者エージェントは壁エージェント
を隔てた向かい側を見ることができない。壁の向こう側を見ることができる窓のようなも
のは存在しないものとする。
ドアエージェントはドアを表す。ドアは解錠されているものとする。バックドラフトや、
開けたドアが避難者にぶつかる、障害物がありドアが開けられないなど、ドアを開閉する
際に起こりうる影響は考慮しないので、常時ドアは開いていると考えて差し支えない。
避難経路案内板エージェントは避難経路の方向を指示する。4 方向それぞれを表すために
別個のエージェントが用意されている。指示する方向は、標準状態では複数方向を指示す
るため、このときは別の方向を表す案内板エージェントが複数個同じセルに配置される。
最適避難経路による誘導を行う場合は最適避難経路に従った方向を指示する案内板エージ
ェントが配置される。避難者エージェントが避難経路案内板エージェントを発見した場合、
20
避難者エージェントは必ず指示の方向へ移動することとする。
出口エージェントは出口を表す。下階層へ接続している階段、エスカレーターを出口とし
て扱う。エレベーターは閉じ込められる可能性があり避難施設としては不適格なため、出
口とは扱わない。避難はしご、避難スロープなどの避難器具は設置されていないものとし
て考える。
交差点エージェントは廊下同士の交差点を表す。交差点は複数の方向へ移動可能な経路が
あるという性格から、地図データをグラフ化した際ノードとほぼ 1 対 1 で対応する。
廊下エージェントは廊下を表す。避難者エージェントが、自身が部屋の中、外どちらにい
るかを判断するためにドアエージェントと廊下エージェントの位置関係を利用する。
焦げエージェントは火エージェントがそのセルに存在する可燃物を全て焼き尽くした状
態を表す。焦げエージェントが配置されたセルには、火エージェントは延焼することがで
きない。
21
第5章
章最適避難経路動的設定の
最適避難経路動的設定の検証実験
5.1
避難行動シミュレータ
避難行動シミュレータ単体
シミュレータ単体の
単体の検証実験
5.1.1 検証実験の方法
最適避難経路動的設定の検証に先立ち、避難経路動的設定プログラムの有効性検証に用い
る避難行動シミュレータ単体の有効性検証を行われなければならない。避難行動シミュレ
ータ単体の有効性検証は、火エージェントを排除した状態での避難行動シミュレーション、
言わば、避難訓練を行う。
延焼速度を平均 100 m / h とすると、延焼面積は平均 10000π m 2 / h となる。本研究で避難
行動シミュレーションに用いるモデル空間の面積はおよそ 100 セル( 50 m )四方、
( )
50(m ) × 50(m ) = 2500 m 2 であるから、この空間は 5 分前後で全焼する計算になる。
避難訓練の段階では、避難完了時間 5 分未満での避難成功率が 90%以上であれば避難行
動シミュレータとしての有効性、信頼性は得られると考える。
避難行動シミュレータの検証条件を表 5-1 に示した。避難者エージェントの初期配置は
50 人をランダムに配置する。火エージェントは配置せず、延焼確率も空間、壁ともに 0 に
設定しておく。50 回の試行で、避難開始から 5 分間での避難成功率を調査する。シミュレ
ータ内時間で 5 分、ステップ数で 600 ステップ経過したところでシミュレーションを打ち
切り、次の試行を開始する。
表 5-1 避難行動シミュレータ
避難行動シミュレータ検証条件
シミュレータ検証条件
避難者エージェント数
50 人
避難者初期位置
ランダム
出火位置
設定しない
延焼確率
空間、壁共に 0
試行回数
50 回
打ち切り時間
600 ステップ
(シミュレータ内時間)
(5 分)
22
5.1.2 実験結果
避難行動シミュレーションを行った結果は表 5-2 の通りである。
「避難成功者数」と「打
ち切りの場合を含まない避難完了時間」の 2 つについてそれぞれ最小値、最大値、平均値
を求めた。なお、50 回全ての試行結果は付録 B として添付してある。
避難成功率 100%となった試行は 17 回あり、
その場合の避難完了時間は最小 276 ステップ、
最大 566 ステップ、平均 411 ステップという結果を得た。600 ステップ経過時の残存避難者
数は 0 人が 17 回、1 人が 21 回、2 人と 3 人がともに 6 回、平均 1.02 人であった。50 回の
試行で平均避難成功率が 97.96%という結果になった。
表 5-2 実験結果
避難完了時間
避難成功者数
(打ち切りを含まない)
最小値
47 最小値
276
最大値
50 最大値
566
平均値
48.98 平均値
410.588
図 5-1 は避難成功者数の内訳を示したグラフである。横軸には避難成功者数の人数、縦軸
にはその人数で終了したシミュレーション回数をとった。内訳は、46 人以下は 0 回、47 人、
48 人が共に 6 回、49 人が 21 回、50 人が 17 回である。
図 5-2 は避難完了時間の内訳を示したグラフである。横軸には避難完了時間が 50 ステッ
プごとにまとめてある。縦軸はその避難完了時間に該当するシミュレーションの回数であ
る。内訳は、250 ステップ未満が 0 回、250~299 ステップが 2 回、300~349 ステップが 3 回、
350~399 ステップが 6 回、400~449 ステップが 1 回、450~499 ステップが 0 回、500~549 ス
テップが 2 回、550~599 ステップが 3 回、600 ステップで打ち切られた試行が 33 回であっ
た。
23
25
21
20
17
15
回数
10
6
6
47
48
49
避難成功者数
5
0
50
図 5-1 避難成功者数グラフ
避難成功者数グラフ
33
35
30
25
回数
20
15
10
5
6
2
3
1
0
0
2
9
9
9
9
9
9
9
29 ~34 ~39 ~44 ~49 ~54 ~59
~
35 0
550
400
450
300
500
250
避難完了時間
3
0
60
図 5-2 避難完了時間グラフ
避難完了時間グラフ
5.1.3 結果の考察
50 回の試行で避難成功者数が最低でも 47 人となった。これはこのシミュレータの高い安
定性を表しているのではないだろうか。
しかし一方で避難成功者数の最頻値は 49 人である。
24
平均避難成功率 97.96%という数値からも読み取れる通り、毎回平均 2%、避難者エージェン
トが 50 人であれば毎回平均 1 人の残存避難者が出るという計算になる。この 2%という値
はどこに起因するものなのだろうか。
考えられるのは、ここで重要なのは割合ではなく、毎回の試行で平均 1 人の残存避難者が
出るということだ、という見方である。つまり、避難者エージェント初期配置人数に関わ
らず、600 ステップ経過時においては毎回平均 1 人の残存避難者が存在するのではないか。
言い換えれば、毎回平均 2%の残存避難者が出るというのは今回の検証実験の避難者エージ
ェント初期配置が 50 人であったために表れた数値なのではないだろうか。
もしこの見方が正しいとすると、避難者エージェントの初期配置人数が多くなればなるほ
ど避難成功率は上がり、逆に初期配置人数が少なくなれば避難成功率が下がることになる。
これは、この避難行動シミュレータは少人数避難行動シミュレーションに適さない、と言
っているに等しい。
また、今回の検証実験で割合がさほど重要視されないとなると、当初の目標であった平均
避難成功率 90%という値も再考せざるを得ない。毎回平均 1 人の残存避難者が出ると仮定
すると、避難者エージェントの初期配置人数が 10 人以上であれば平均避難成功率 90%を満
たす結果を得ることが出来るためである。
ここではむしろ、避難成功率 100%や残存避難者数 0 を目指すのではなく、毎回少数名存
在する異質な避難者エージェントの動きを非常事態の産物として解釈するのが良いのでは
ないかと考える。非常事態の産物とは、人間が非常事態に置かれたときに犯してしまうミ
ス、パニック行動などのことである。そのように考えれば、完璧を目指して機械の如く動
く避難者エージェントばかりのシミュレータよりも幾分人間味のあるシミュレーションが
行えると見ることが出来る。
以上のことから、この避難行動シミュレータは数十人規模以上の比較的大人数による避難
行動シミュレーションに適しており、非常事態に置かれた避難者のパニック行動などを再
現する可能性も秘めていると結論付ける。
25
5.2
避難経路動的設定プログラム
避難経路動的設定プログラムの
プログラムの検証実験
5.2.1 検証実験の方法
出火位置情報を元に避難経路動的設定プログラムを用いて最適避難経路を導き、避難経路
案内板の示す方向を設定する。なお、最適避難経路動的設定の詳細については付録 A を参
照されたい。
避難経路動的設定プログラムの有効性は避難経路最適化の有無、つまり避難経路案内板に
よる指示が最適避難経路に基づく方向である場合と標準避難経路で指示される場合の 2 パ
ターンで避難行動シミュレーションを行い、比較検証する。案内板が示す標準避難経路の
方向は図 5-3 に示した。この図はモデル空間内の出口と交差点をグラフ化して表したもの
である。円形のノードは交差点、矩形のノードは出口を表している。交差点ノードからエ
ッジ上に伸びる矢印がそれぞれの交差点に設置された避難経路案内板が指示する避難方向
である。
避難行動シミュレータの条件を表 5-3 にまとめた。避難者エージェントは 30 人、初期位
置はランダムで、2 パターンの比較を行う際公平を期すため同じ初期配置になるよう、再現
可能な状態にしておく。空間延焼確率は 0.07、壁延焼確率は 0.02 とした。これは火エージ
ェントが延焼を試みた時、成功する確率がそれぞれ 7%、2%ということである。
シミュレーションの試行回数は避難経路最適化の有無でそれぞれ 5 回、1 回のシミュレー
ションで 600 ステップを超えた場合はシミュレーションを打ち切り、次のシミュレーショ
ンを開始する。
26
A
B
O
P
C
Q
D
R
E
F
:出口
:交差点
G
H
I
J
S
T
L
K
M
N
図 5-3 案内板が
案内板が示す方向の
方向の標準状態
表 5-3 避難行動シミュレータ
避難行動シミュレータ検証条件
シミュレータ検証条件
避難者エージェント数
30 人
避難者初期位置
ランダム
出火位置
1 ヶ所
空間延焼確率
0.07
壁延焼確率
0.02
試行回数
避難経路最適化なし 5 回
避難経路最適化あり 5 回
打ち切り時間
600 ステップ(5 分)
出火位置 1
今回の検証で用いる出火位置のひとつ目はモデル空間の左側中央の部屋とした(図 5-4)
。
図中では出火位置を太い丸印で示してある。この出火位置はフロアの 1 室から出火した場
合を想定している。図 5-5 はこの出火位置からの最適避難経路を指示する案内板の向きを
表している。図中で三角の印は出火位置を表している。
27
図 5-4 出火位置 1、1 回目の
回目の初期配置図
A
B
O
P
Q
D
C
R
E
F
:出口
:交差点
G
H
I
J
M
N
:出火位置
S
T
L
K
図 5-5 出火位置 1 からの最適避難経路
からの最適避難経路に
対応した避難経路案内板
最適避難経路に対応した
した避難経路案内板の
避難経路案内板の向き
出火位置 2
出火位置ふたつ目はモデル空間の中央下寄りに位置する階段とした。
(図 5-6)。図中の太
い丸印が出火位置である。これは階段から出火した、もしくは階下から火が回ってきた状
況を想定している。最適避難経路に対応した避難経路案内板の向きを図 5-7 に示した。
28
図 5-6 出火位置 2、1 回目の
回目の初期配置図
A
B
O
P
Q
D
C
R
E
F
:出口
:交差点
G
H
I
J
M
N
:出火位置
S
T
L
K
図 5-7 出火位置 2 からの最適避難経路
からの最適避難経路に
対応した避難経路案内板
最適避難経路に対応した
した避難経路案内板の
避難経路案内板の向き
5.2.2 実験結果
出火位置 1
出火位置 1 について避難経路案内板の指示が標準の場合と、最適避難経路を指示する場合
の 2 通りのシミュレーションを行った結果を表 5-4 にまとめた。避難経路案内板の状態 2
通りについて、避難者の初期位置を同じにした、同じ試行番号のシミュレーションを並べ
29
てある。それぞれの試行について、避難経路案内板の状態、避難成功者数、所要時間、避
難失敗者数を示した。
表 5-4 出火位置 1 のシミュレーション結果
シミュレーション結果
試行番号
避難経路案内板 避難成功者数 所要時間 避難失敗者数
1
標準
27
273
3
最適避難経路
30
178
0
標準
29
193
1
最適避難経路
27
197
3
標準
30
190
0
最適避難経路
30
230
0
標準
28
172
2
最適避難経路
28
126
2
標準
29
226
1
最適避難経路
28
201
2
2
3
4
5
出火位置 2
表 5-5 は出火位置 2 の結果である。避難経路案内板の状態 2 通りについて、避難者の初期
位置が同じ試行を並べてある。それぞれの試行について、避難経路案内板の状態、避難成
功者数、所要時間、避難失敗者数を示した。
表 5-5 出火位置 2 のシミュレーション結果
シミュレーション結果
試行番号
避難経路案内板 避難成功者数 所要時間 避難失敗者数
1
標準
17
215
13
最適避難経路
24
124
6
標準
19
163
11
最適避難経路
23
149
7
標準
18
218
12
最適避難経路
23
270
7
2
3
30
4
5
標準
19
178
11
最適避難経路
28
158
2
標準
20
168
10
最適避難経路
25
133
5
5.2.3 結果の考察
出火位置 1
図 5-4 から、出火位置 1 はモデル空間の左側中央の部屋である。このため、出火位置に近
い左側の部屋にいる避難者の円滑な避難行動が重要となる。この出火位置は、縦方向はフ
ロア中心に近いが横方向は端にあるので時間に余裕を持った避難行動ができるのではない
かと考える。図 5-5 から出火位置はグラフ構造の左外側にあるので、左側の案内板はそろ
って右方向を指示している。その他もできるだけ火に近づかないように避難する経路を指
示していることが読み取れる。
表 5-4 から、最も重要視すべき要素である避難失敗者数については 1 回目の試行では標準
の 3 人を 0 人に改善することができたものの、それ以降の試行では残念ながらあまり良い
結果とはならなかった。2 回目、5 回目の試行では標準よりも悪い結果が出ている。
出火位置 1 はモデル空間の 1 室、また端の方に位置しているため、出火位置から離れた空
間右側の避難者エージェントは比較的時間に余裕を持った避難行動ができる。また危険性
の高い空間左側にいる避難者エージェントについては、標準の案内板からランダムに経路
を選択したとしても早い段階で出口を見つけられる。交差点 G-L 間で往復しない限り、す
ぐに出口への 1 方向だけを指示する案内板を見つけることが出来るためである。
以上のことから、この出火位置では最適避難経路の指示による効果が小さいのではないか
と考えられる。このことを裏付けるのが 3 回目の試行である。3 回目の試行は標準状態にお
いても全員が避難に成功していて、標準状態でも充分に安全な避難行動が可能であること
を如実に示している。
避難失敗者数に改善が見られた 1 回目の試行について状況を観察してみると、標準状態の
シミュレーションでは出火した部屋の下の部屋にいた避難者が部屋から出るのに時間がか
かったため火に退路をふさがれ、避難に失敗した。そのため、この試行における避難失敗
31
者数の改善は最適避難経路を指示した避難経路案内板によるものではなく、避難者エージ
ェントが部屋から出て避難経路案内板を見つけるまでにかかった時間の違いによるもので
あることがわかった。
2 回目、5 回目の試行について、案内板が最適避難経路を指示した場合の方が悪い結果に
なった理由として考えられる点は、避難者同士の同調行動である。避難経路案内板を見つ
けた避難者エージェントは他者と同調することはないが、案内板を見つけていない避難者
エージェントの同調行動が避難行動を遅らせる何らかの要因になったのではないだろうか。
出火位置 2
図 5-6 から、出火位置 2 はモデル空間の中央下寄りの階段である。このため、この階段は
出口として機能しなくなる。この階段は 2 ヶ所から利用することができるので、今回の出
火位置では 2 ヶ所の出口を失った状況となっている。今回は出火位置 1 と比べて出火位置
がフロア中央に近いため火の回りが速く、避難行動を妨げることになると簡単に予想でき
る。図 5-7 を見ると、ノード S, T の間に出火位置が設定されている。そのためノード S に
接続しているノード H、ノード T に接続しているノード K はノード S, T が位置的に最も近
い出口でありながらそれぞれその場所から離れるように各案内板が指示している。
表 5-5 から、出火位置 1 の場合に比べて、この出火位置では避難経路案内板の状態 2 通り
の間に明確な差が表れたことがわかる。特筆すべきは最重要項目である「避難失敗者数」
の列である。避難経路案内板が標準避難経路を指示している場合、避難失敗者数が軒並み
10 人以上出ているのに比べ、最適避難経路の場合 2 人~7 人に抑えることができた。最適
避難経路の場合で避難失敗者数を 0 人にすることが 1 度もできなかったのが残念ではある
が、約半数に抑えることができたという点はこの最適避難経路動的設定の信頼性を裏付け
るに充分であると考える。
所要時間もほとんどの試行で最適避難経路を指示した方が良い結果を残している。所要時
間が増大した場合についても、避難経路案内板が標準の状態で早期に避難失敗していた避
難者エージェントを、火から遠ざけることで時間がかかりながらも出口へ導くことが出来
たのではないかと考えれば、状況が悪化したとは一概には言えない。
32
5.3
最適避難経路動的設定に
最適避難経路動的設定に関する考察
する考察
出火位置 1 の検証結果からは標準の状態と最適避難経路の状態の間に有意な差が見られ
なかった。3 回目の試行を除く全ての試行で避難失敗者が出た点については、5.1 避難行動
シミュレータ単体の検証実験から、このシミュレータは毎回少数の避難失敗者を出すこと
は予想に難くないため、この程度の避難失敗者数であれば全員が避難に成功したと見なし
ても差し支えないだろう。しかし標準の状態でもある程度の避難成功率が期待できる出火
位置においては最適避難経路の有効性が示せなかったというのは事実である。出火位置 2
の検証結果は最適避難経路を用いることによって避難失敗者数が大幅に改善したことを示
している。使用してはいけない出口が存在するなど、より危険性の高い出火位置において
本研究の最適避難経路による指示が有効に働いた。
しかしながら最適避難経路動的設定方法には改良の余地があると考えられる。例えば複数
階層フロアの避難行動に対応した場合、出火階よりも上の階層にいる避難者の避難を優先
させるため、下の階層にいる避難者の避難を意図的に遅らせるなどの措置を取ることが望
ましい。複数階層フロアへの対応は最適避難経路動的設定だけでなく避難行動シミュレー
タにも言える事である。その際はエージェントの階層間移動の実装が主な変更点となる。
以上のことから、本研究の最適避難経路動的設定は改良の余地は認められるものの、現状
でも充分に火災時の円滑な避難行動を支援し、危険性の高い避難施設がある場合には特に
高い成果を挙げることができると結論付ける。
33
第6章
章おわりに
本研究では最適避難経路動的設定と、避難行動シミュレータによる検証を行った。しかし
当初考えていた「最適避難経路動的設定プログラム」の実装については時間の都合上諦め
ざるを得ない状況となった。この点は今後の課題として第一に挙げられる。
火災以外の災害への対応なども今後の課題として挙げられる。本研究の最適避難経路探索
で用いた避難経路をグラフ化し最短経路問題として解く方法は、グラフの重み付け方法を
変えるだけで比較的容易に他災害への応用が可能なのではないかと考えている。もっとも
この方法で解く場合、グラフの重み付けが最も重要で難しい要素であるということは言う
までもない。
グラフの重み付けに重要な役割を果たした、最適避難経路探索の要とも言える危険度パラ
メータをより洗練させていくことも重要である。本研究で定義したパラメータよりももっ
と正確に危険度を計ることができるパラメータがあるかもしれない。また、パラメータの
数を増やすことも考えられる。例えばフロア内の避難者分布を見てひとつひとつの出口に
向かう人数のバランスを調整するというようなことも可能ではないだろうか。
避難行動シミュレータの信頼性をさらに向上させることも課題として残っている。第一に
避難者エージェントにさらなる「人間らしさ」を与えることが考えられる。これは最も重
要なことでありながら大変難しい作業である。個人の動きに加えて群集心理による動きも
考慮しなくてはならず、これらの行動に対する心理学による裏付けなども必要になる。
次に、煙エージェントの実装が求められるだろう。実際の火災においても、焼死よりも煙
に巻かれて一酸化炭素などの有害ガス中毒による死亡者数の方が圧倒的に多い。煙エージ
ェントは非常に複雑な動きをするはずで、モデル空間でドアの開閉や窓などの存在を実装
した場合、煙エージェントの動きの複雑さはより一層高まることが予想できる。
空間内のセルはすべて可燃物であると想定しているが、不燃物の設定を取り入れることに
よる影響は大きいと考えられる。現状でも空間と壁で延焼確率を設定することが出来るの
で、不燃物の実装は比較的容易に行える。また避難施設エージェントの設置も考慮すべき
である。避難はしごや避難スロープは実装が難しいが、防火扉やスプリンクラーは一考す
る価値があると思われる。
34
また、これらの要素を実装した上で、シミュレータを現実的な速度で稼動させることも念
頭に入れておかなくてはならない。現状では実時間のおよそ 2 倍、つまりシミュレータ内
で 5 分間 600 ステップのシミュレーションを行った場合、実時間で 10 分前後の時間を要す
る。これは避難者エージェントの初期配置人数を 30 人、火エージェントを配置した場合で、
避難者エージェントの数が増えればさらに長い時間が必要となる。できれば実時間と同等
の速度としたい。そのために効率的なアルゴリズムを考案することと効率的なコーディン
グが課題となる。
最適避難経路動的設定プログラムの実用化にあたっては、出火位置の取得から避難経路案
内板の指示方向を変更する作業までを自動化するシステムが必要になるだろう。また、尊
い人命に関わるものであるため、システムの故障などのリスクを考えるとこのまま実用化
することは難しい。まずは交通渋滞の回避やアミューズメントパーク内のアトラクション
混雑の回避など、リスクの小さい分野に適用して信頼性を向上させるのが良いだろう。
以上に挙げたように課題点が山積しているが、時間内に挙げることが出来た成果について
は充分に満足できるものである。本研究を元にした更なる応用に期待したい。
35
謝辞
モデリング&シミュレーションプロジェクトの指導教員である、東京工科大学メディア学
部藤澤公也講師の多大なる尽力に感謝いたします。東京工科大学メディア学部宮岡伸一郎
教授にも大変お世話になりました。TA 渡辺賢悟さんからもたくさんのアドバイスをいただ
きました。また、同プロジェクトのメンバーとのコミュニケーションは研究の合間にほっ
と一息つかせてくれました。あなた方と同じ時間と空間を共有できたことを嬉しく思いま
す。
本研究において大変重要な役割を担った避難行動シミュレータのプラットフォーム、「マ
ルチエージェントシミュレータ」を無償貸与してくださった構造計画研究所様に感謝の意
を表します。このソフトウェアなしに私の研究は成り立ちませんでした。
最後に、所属サークル「アミューズメントメディア研究会」のメンバー、友人、家族の皆
さん、卒業研究には直接関係ありませんがいろいろと気を使ってくれました。ありがとう。
36
参考文献
[1] オーム社(編集), “建築基準法令集 ‘98 年”, オーム社, 1998
[2] 野竹 宏彰, 海老原 , 矢代 嘉郎, “避難距離期待値を用いた避難経路の明解性の評価に
関する研究”, 清水建設技術研究所, 1996
[3] 穴田 幸代, 織田 珠枝, 御舘 恵美, 鹿田 正昭, “GIS を用いた避難経路のシミュレーシ
ョン”, 金沢工業大学, 1998
[4] Robert Lafore, 岩谷 宏, “Java で学ぶアルゴリズムとデータ構造”, ソフトバンクパブリ
ッシング
[5] 構造計画研究所, http://www.kke.co.jp/
[6] 構造計画研究所 創造工学部, “MAS コミュニティ”, http://www2.kke.co.jp/mas/
37
付録 A モデル空間
モデル空間における
空間における危険度
における危険度の
危険度の算出
表 6-1 は各ノード間の距離を示している。ノードは A-T までの 20 個ある。接続している
ノード間の欄にはそのノード間の距離がメートル単位で記してある。接続していないノー
ド間の欄には「-」が、同じノード同士の欄には 0 が記入してある。この距離はモデル空間
のセル単位で計測したため、距離の最小単位は 50 センチメートルとなっている。
表 6-1 各ノード間
ノード間の距離
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
A
0
19.5
12
4
-
K
L
M
N
O
P
Q
R
S
T
K
0
2
5.5
B
C
D
E
F
G
H
I
J
0
13.5
11.5
-
0
8.5
5.5
-
0
9.5
3
-
0
4
8
-
0
8
-
0
4
10
-
0
11.5
6
-
0
4
-
0
10
-
L
M
N
O
P
Q
R
S
T
0
15
-
0
4.5
-
0
-
0
-
0
-
0
-
0
-
0
-
0
出火位置 1
表 6-2 には出火位置と各ノード間の直線距離が示してある。数値の単位はメートルで、小
数点第 4 位以下は四捨五入した。
38
表 6-2 出火位置と
出火位置と各ノード間
ノード間の距離
出火位置からの
出火位置からの
ノードのラベル
ノードのラベル
直線距離(単位:m)
直線距離(単位:m)
A
B
C
D
E
F
G
H
I
J
26.926
40.636
34.558
17.804
30.992
34.821
14.08
18.062
29.538
33.534
K
L
M
N
O
P
Q
R
S
T
29.614
16.378
30.083
34.562
50.312
26.632
30
19.981
18.554
24.254
表 6-3 には各ノードに接続しているエッジの危険度パラメータの逆数を記してある。この
値は「各ノードの出火位置からの距離」の積算で求めることが出来る。この値は小数点第 4
位以下を四捨五入している。
表 6-3 危険度パラメータ
危険度パラメータの
パラメータの逆数
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
K
L
M
N
O
P
Q
R
A
0
1216.073
479.39
717.093
-
B
C
D
E
F
G
H
I
J
0
1414.986
2044.478
-
0
1071.022
1036.74
-
0
250.68
355.742
-
0
1079.172
915.442
-
0
1167.687
-
0
254.312
230.602
-
0
533.515
335.122
-
0
990.527
-
0
1159.002
-
K
L
M
N
O
P
Q
R
S
T
0
890.878
-
0
492.699
-
0
1039.729
-
0
-
0
-
0
-
0
-
0
39
S
T
718.258
-
-
-
-
-
-
-
0
-
0
表 6-4 は移動コストを記した表である。この値が最終的に最短経路問題で扱われるエッジ
の重みとなる。計算方法は各ノード間の「距離」と「危険度パラメータ」の積算である。
言い換えれば、表 6-3 は危険度パラメータの逆数を表しているので、表 6-1 の値を表 6-3
の値で割った商が表 6-4 の値となる。この値は小数点第 6 位以下を四捨五入している。
表 6-4 移動コスト
移動コスト
A
0
0.01604
0.02503
0.00558
K
B
C
D
E
F
G
H
I
J
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
0
0.00954
0.00562
L
0
0.00793
0.00531
M
0
0.0379
0.00843
N
0
0.00371
0.00874
O
0
0.00685
P
0
0.01573
0.04336
Q
0
0.02156
0.0179
R
0
0.00404
S
0
0.00863
T
K
L
M
N
O
P
Q
R
S
T
0
0.00224
0.00766
0
0.03044
-
0
0.00433
-
0
-
0
-
0
-
0
-
0
-
0
-
0
最後に各ノードから出口ノードそれぞれへの最小移動コストを表 6-5 にまとめた。ノード
O からノード T までが出口である。各ノードについて、最小移動コストの中で最小の値を
示した出口がそのノードから見た最適な出口である。それに該当する欄を太枠で強調して
ある。最適避難経路動的設定プログラムはこの値から各避難経路案内板の指示方向を設定
する。
40
表 6-5 各ノードから
ノードから各出口
から各出口への
各出口への最小移動
への最小移動コスト
最小移動コスト
A
B
C
D
E
F
G
H
O
0.02166
0.00562
0.0268
0.04699
0.01887
0.01516
0.08459
0.04761
P
0.00558
0.02162
0.0428
0.03061
0.03487
0.03116
0.06851
0.06361
Q
0.04253
0.02649
0.00531
0.06756
0.01324
0.01695
0.05927
0.04354
R
0.03346
0.0495
0.07068
0.00843
0.06275
0.05904
0.04633
0.06206
S
0.07593
0.05989
0.05613
0.07153
0.0482
0.05035
0.03363
0.0179
T
0.05529
0.03925
0.04165
0.08032
0.03342
0.02971
0.06419
0.04846
I
J
K
L
M
N
O
P
Q
R
S
T
0.02605
0.02201
0.03721
0.06541
0.03497
0.03064
0
0.02724
0.03211
0.05512
0.06551
0.04487
0.04205
0.03801
0.05321
0.08141
0.05097
0.04664
0.02724
0
0.04811
0.03904
0.08151
0.06087
0.02198
0.0238
0.039
0.0672
0.03676
0.03243
0.03052
0.04811
0
0.07594
0.06144
0.04666
0.06993
0.06589
0.08109
0.08969
0.07885
0.07452
0.05512
0.03904
0.07599
0
0.07996
0.08875
0.03946
0.0435
0.0587
0.07699
0.05646
0.05213
0.06551
0.08151
0.06144
0.07996
0
0.06636
0.0269
0.02286
0.00766
0.04034
0.0099
0.01423
0.04487
0.06097
0.04666
0.08875
0.06636
0
出火位置 2
出火位置 1 と同じく、
出火位置と各ノード間の距離を表 6-6 に、
危険度パラメータを表 6-7
に、移動コストを表 6-8 に、各ノードから各出口への最小移動コストを表 6-9 に示した。
表 6-6 出火位置と
出火位置と各ノード間
ノード間の距離
出火位置からの
出火位置からの
ノードのラベル
ノードのラベル
直線距離(単位:m)
直線距離(単位:m)
A
B
C
D
E
F
G
H
I
J
29.47
30.923
24.824
18.125
17
19.209
10.259
7.826
10.63
13.892
K
L
M
N
O
P
Q
R
S
T
7.517
8.078
7.906
12.369
39.953
26.387
23.633
16.621
3.162
2.062
表 6-7 危険度パラメータ
危険度パラメータ
A
B
C
D
A
0
911.301
534.144
B
C
D
0
-
0
-
0
E
F
41
G
H
I
J
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
K
L
M
N
O
P
Q
R
S
T
777.625
-
594
1235.467
-
422.008
586.666
-
185.944
301.256
-
0
326.553
180.71
K
L
M
0
59.429
15.5
0
63.865
-
0
97.789
-
-
0
266.851
-
0
80.287
82.872
-
0
83.19
24.746
-
0
147.672
-
0
171.83
-
N
O
P
Q
R
S
T
0
-
0
-
0
-
0
-
0
-
0
-
0
F
G
H
I
J
-
0
0.02998
-
0
0.04982
0.12067
-
0
0.13824
0.24246
-
0
0.02709
-
0
0.0582
-
P
Q
R
S
T
表 6-8 移動コスト
移動コスト
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
K
L
M
N
O
A
0
0.0214
0.02247
0.00514
-
B
C
D
E
0
0.02273
0.00931
-
0
0.02014
0.00938
-
0
0.05109
0.00996
-
K
L
M
N
O
0
0.03365
-
0
0.23487
-
0.23487
0
0.04602
-
0.04602
0
-
0
0
0.01225
0.04427
42
P
Q
R
S
T
0.35484
-
-
-
-
0
-
0
-
0
-
表 6-9 各ノードから
ノードから各出口
から各出口への
各出口への最小移動
への最小移動コスト
最小移動コスト
A
B
C
D
E
F
G
H
I
J
K
O
0.03071
0.00931
0.06443
0.05318
0.04429
0.03204
0.10427
0.15409
0.08856
0.06202
0.19989
P
0.00514
0.02654
0.08166
0.02761
0.06152
0.04927
0.0787
0.12852
0.10579
0.07925
0.21712
Q
0.0859
0.0645
0.00938
0.10837
0.02952
0.04177
0.15946
0.20928
0.07379
0.07175
0.20962
R
0.03243
0.05383
0.10895
0.00996
0.08881
0.07656
0.06105
0.11087
0.13308
0.10654
0.24441
S
0.36584
0.38724
0.44236
0.34337
0.42497
0.42222
0.40997
0.29228
0.24246
0.3807
0.54566
T
0.56682
0.54542
0.55508
0.58929
0.53494
0.52269
0.64038
0.65804
0.5198
0.49271
0.35484
L
M
N
O
P
Q
R
S
T
0.22494
0.16624
0.12022
0
0.03585
0.07381
0.06314
0.39655
0.55473
0.19937
0.18347
0.13745
0.03585
0
0.09104
0.03757
0.37098
0.57196
0.28013
0.17597
0.12995
0.07381
0.09104
0
0.11833
0.45174
0.56446
0.18172
0.21076
0.16474
0.06314
0.03757
0.11833
0
0.35333
0.59925
0.41295
0.51201
0.46599
0.39655
0.37098
0.45174
0.35333
0
0.9005
0.62336
0.38849
0.43451
0.55473
0.57196
0.56446
0.59925
0.9005
0
43
0
-
0
付録 B 避難行動シミュレータ
避難行動シミュレータ検証結果
シミュレータ検証結果
5.1 避難行動シミュレータ単体の検証の詳細を表 6-10 にまとめた。各試行について「避難
成功者数」、「残存避難者数」、「避難成功率」、「避難完了時間」を記録してある。シミュレ
ーション開始から 600 ステップ経過したために打ち切られた試行については、
「避難完了時
間」を 0 としてある。
表 6-10 検証結果
試行
避難
残存
No. 成功者数 避難者数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
49
49
47
50
47
47
48
48
49
49
50
49
49
49
49
49
47
49
49
48
50
50
49
49
49
1
1
3
0
3
3
2
2
1
1
0
1
1
1
1
1
3
1
1
2
0
0
1
1
1
避難
成功率
98
98
94
100
94
94
96
96
98
98
100
98
98
98
98
98
94
98
98
96
100
100
98
98
98
避難
試行
避難
残存
避難
避難
完了時間 No. 成功者数 避難者数 成功率 完了時間
0
0
0
284
0
0
0
0
0
0
384
0
0
0
0
0
0
0
0
0
534
418
0
0
0
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
44
49
48
49
48
50
50
50
49
50
50
50
50
50
49
49
48
50
50
47
49
47
50
50
49
50
1
2
1
2
0
0
0
1
0
0
0
0
0
1
1
2
0
0
3
1
3
0
0
1
0
98
96
98
96
100
100
100
98
100
100
100
100
100
98
98
96
100
100
94
98
94
100
100
98
100
0
0
0
0
566
334
537
0
276
376
304
328
564
0
0
0
392
551
0
0
0
389
365
0
378
© Copyright 2026 Paperzz