特別実験レポート
反射高速電子回折による Si(111) 表面上の超構造の観察と
電子ビーム蒸着源の試作
小林憲正
東京大学理学部物理学科 4 年 51519
1997 年 2 月 15 日
目次
第 I 部 RHEED による Si(111) 表面とその微斜面上の金属の蒸着によって
生じる原子配列構造の観察
3
第 1 章 目的
4
第 2 章 RHEED とそのパターンの解釈
5
2.1
2.2
2次元フーリエ変換
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RHEED パターンと逆格子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 3 章 Si(111) 表面上の超構造
3.1
格子表面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2
3.3
金属の蒸着とドメイン . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Si(111) 微斜面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 4 章 装置概要と実験手順
5
7
10
10
12
15
4.1
4.2
真空関連 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
電子銃 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
17
19
4.3
Si(111) 面への Au 蒸着 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
第 5 章 結果と考察
5.1
5.2
RHEED パターンと逆格子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(111) 面とその微斜面の効果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
22
22
5.3
5 × 2 構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
第 II 部
電子ビーム蒸着源の作製と性能評価
27
第 6 章 コンセプト
28
第 7 章 simion によるシミュレーション
29
第 8 章 実験と結果
37
37
8.1
膜厚計による蒸着源の性能評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2
8.3
蒸着源の改造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
微小電流計による Nb 蒸着レートの測定の試み . . . . . . . . . . . . . . . . . . . .
第 9 章 Si(111) 表面上への Nb の蒸着
39
40
44
1
第 III 部
まとめと展望
45
第 10 章 結論
10.1 RHEED による Si(111) 面の観察 . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 電子ビーム蒸着源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
46
46
第 11 章 課題と展望
47
付 録 A Au(111) 表面の STM による観察
48
48
48
A.1 STM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Au(111) 面の観察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
第I部
RHEED による Si(111) 表面とその
微斜面上の金属の蒸着によって生じる
原子配列構造の観察
第1章
目的
Si(111) 表面は、表面研究の分野で、古くから研究されていて、その表面構造についての性質は比
較的詳しく知られている。今回の実験では、RHEED(reflection high energy electron diffraction)
の使い方、真空装置の概念、RHEED パターンの解釈の演習を経て、Si(111) の表面構造について
調べることを目的とする。
まず、Si(111) 面で、7 × 7 の超構造を観察する。つぎに、Au を蒸着し、知られている相図に従っ
て構造が変化することを確認する。次に試料を、Si(111) 微斜面 (2◦ ) のウエハーに取り替える。そ
して、7 × 7 構造や、Au、Ag を蒸着したときに生じる構造を観察する。このとき、ドメインの方
向の、ウエハーの通電加熱の電流の方向依存性や微斜面のステップエッジの方向依存性などがある
かどうかを考察する。
4
第2章
2.1
RHEED とそのパターンの解釈
2次元フーリエ変換
フーリエ変換は、古くからの数理解析の手法であり、数々の性質が知られている。画像処理にお
いても、特に周期性の分析や、それを利用した加工において、フーリエ変換は大きな役割を果たし
ている。結晶構造解析においても、注目している周期構造において単位構造の数が十分に大きけれ
ば、回折パターンは逆格子をなし実格子のフーリエ変換となることが知られている。結晶も、その
回折パターンも、それぞれ一般には正規直交基底で表現するのに適さないため、平面上のフーリエ
変換を基底の取り方によらない形で定義する1 。
実空間 フーリエ変換するもとの関数 f が定義される平面。その元を x などと書く。
逆空間 f がフーリエ変換された関数 F が定義される平面。その元を X などと書く。
実空間と逆空間の基底を同一の正規直交基底にとるときは、普通の 2 変数関数のフーリエ変換と
して定義する。すなわち、
∫
F (X(X, Y )) =
dxdye2πi(Xx+Y y) f (x(x, y))
X = Xe1 + Y e2 , x = xe1 + ye2
実際、物理では、逆空間のベクトルは実空間のベクトルとしても意味を持つことが多い。たとえ
ば、波動において、波数ベクトルの持つ向きは、実空間での向きである。この定義が基底変換で保
存されるように、一般の平面上のフーリエ変換を定義すればよい。実空間、逆空間の基底をそれぞ
れ、 ⟨a1 , a2 ⟩, ⟨a∗1 , a∗2 ⟩ とおき、
x = ua1 + va2 , X = U a∗1 + V a∗2
∫
とすると、
F (X(U, V )) = |G|
dudve2πiX·x f (x(u, v))
(
G=
∂(x, y)
∂(u, v)
)
G は、Jacobian 行列であるが、基底の変換行列でもある2 。積分の核が、実空間の基底の取り方に
よらず、 e2πi(U u+V v) となるためには、実空間の基底ベクトルと逆空間の基底ベクトルが次の関係
にあることが必要十分であることが容易に分かる。
a∗i · aj = δij (i, j = 1, 2)
1 もちろん一般には、
n 次元多様体で定義することもできるが、2 次元の場合と同様である
は定値行列である。
2 ユークリッド空間の座標変換であるため、G
5
(2.1)
多変数関数のフーリエ変換に対して成り立つ以下の関係が、上のように定義された一般の n 次
元空間のフーリエ変換に対しても成り立つことは容易に示される。
フーリエ変換の基本性質
1. 線形性
af + bg ↔ aF + bG
2. 畳み込み演算(コンボリューション)
f (x) ∗ g(x) ↔ F (X)G(X)
f (x)g(x) ↔ F (X) ∗ G(X)
3. 遷移則
f (x − a) ↔ e2πia·X F (X)
e2πiA·x f (x) ↔ F (X − A)
4. 拡大
1 X
F( )
a
a
f (ax) ↔
1 x
F ( ) ↔ f (aX)
a a
線形性と遷移則を用いることにより、櫛関数 (comb function)
comb(x; a) =
∑
δ(x − ja)
j
の逆像を求めることが出来る。無限の繰り返し構造(並進対称性)を持つ結晶像 h は、繰り返し
周期を a 、単位格子の中の像を fu とすると、
と表現できる。逆像は、
h(x) = fu (x) ∗ comb(x; a)
(2.2)
1
H(X) = Fu (X)comb(X; )
a
(2.3)
である。 Fu (X) は構造因子。
この議論を 2 次元に拡張する。結晶の基本格子ベクトル a1 , a2 を基底にとり(以下このように
とった基底を格子基底と呼ぶ)、1 次元の場合と同様に、 f, h 等を定義すると、
h(x)
=
∑
fu (x − n1 a1 − n2 a2 )
n1 ,n2
=
∑∑
n2
=
∑
f (x − n1 , y − n2 ) (x = xa1 + ya2 , f (x, y) ≡ fu (x))
n1
f (x, y − n2 ) ∗ comb(x; 1)
n2
= {f (x, y) ∗ comb(y; 1)} ∗ comb(x; 1)
= f (x) ∗ comb(x), comb(x) ≡ comb(x; 1)comb(y; 1)
h をフーリエ変換すると、1 次元の時と同じく
H(X) = Fu (X)comb(X) 6
(2.4)
となる。
comb(x) と comb(X) はそれぞれ実格子と逆格子である。両者は相似であり、なす角度は直角で
ある。
マトリックス法
実空間の 2 組の基底 ⟨as1 , as2 ⟩、⟨at1 , at2 ⟩ とそれらの基底変換が変換行列 G によって
(
)
at1 , at2 G = (as1 , as2 )
(2.5)
と与えられているとする。逆空間基底ベクトルと実空間基底ベクトルの間には、(1) を書き換えて
(
)
(
)
(
)
( t t)
at∗
as∗
1 0
1
1
s
s
a1 , a2 =
(a1 , a2 ) =
(2.6)
at∗
as∗
0 1
2
2
が成り立つ(ただし、ベクトルどうしの積は内積とする)。これが成り立つ必要十分条件は、逆空
間基底の基底変換が次式で表されることである。
(
)
(
)
at∗
as∗
1
1
=G
at∗
as∗
2
2
(2.7)
回折パターンから (7) 式の G を求める方法をマトリックス法という。
2.2
RHEED パターンと逆格子
RHEED では、電子線が試料の表面すれすれに入射し、回折パターンの写る平面スクリーン(蛍
光塗料が塗ってある)は、表面に垂直におかれる。スクリーンと試料の距離は、試料それ自体の大
きさに比べて十分に大きい。従って、回折スポットの位置は、散乱された電子ビームの方向(波
数)k と 1 対 1 対応し、従ってボルン近似が適用できて散乱ベクトル g ≡ k − k0 にも 1 対 1 対応
する。ただし k0 は入射電子ビームの波数ベクトル。回折パターンは、散乱波のスクリーン上への
投影である(図 1)。
RHEED では、表面すれすれに電子線が入射する。表面の状態に従って、回折の仕方の 2 つの極
限として、透過型電子回折と反射型電子回折がある。前者は、表面に凹凸がある場合、突起部分の
みを電子線が通過することによって回折がおこるものと考えられる。一方後者は、十分に表面が平
坦な場合に電子線が表面層にしか侵入しないことによっておきる。表面の構造解析においてほしい
回折パターンは、当然後者の反射型回折パターンである。ただし、どういった像が反射型であるか
を判定できるためには、透過型回折についての性質も知っておく必要がある。他にも、多重散乱や
Si 原子のポテンシャルの非球対称性の効果なども考慮する必要がある。しかし、ここでは簡単のた
め表面が十分に平坦であると仮定し、上記の複雑な議論は省略する3 。
まず、透過型でも反射型でも電子回折図形に一般的に見られる 1 対の平行線状のパターンや平行
線の間が一様に塗りつぶされたパターンは菊池パターンと呼ばれる。菊池パターンは出現する方向
が結晶に固定されたように移動する4 。これは結晶内で非弾性散乱を受けた電子の回折によるもの
であるため、表面ではなくバルク5 の性質を反映している。
3 実際今回の実験では、反射型回折のみを考慮して
RHEED パターンを解釈できるように試料を調整してある。
4 試料を回転させたときのふるまいから菊池パターンと表面の反射型回折パターンを見分けることもできる。
5 結晶の
3 次元的な性質をバルクという。
7
0V
l
R
d
r
A
金属ロッド M
a
s
V
電場シールド S
覆い L フィラメント F
円筒 C
h
a
a0 c
b
エバルト球
試料の位置
k0
k
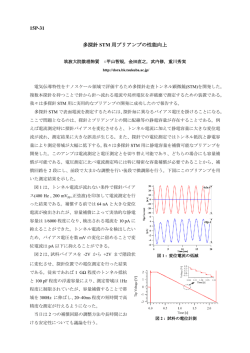
RHEED
図 2.1: RHEED パターンと表面構造の逆格子の関係
つぎに、反射型回折パターンを解釈するために、RHEED パターンと結晶の逆格子の関係を論じ
る。ボルン近似では、1 つの原子による散乱波は、
Ψ(r) = exp(2πik0 · r) +
exp(2πikr)
fe (g)
r
(2.8)
ただし、fe (g) は原子による電子の散乱方向依存性を表す関数である原子散乱因子である。結晶全
体からの散乱因子 Fc (g) は、各原子の散乱波の合成として求められる。表面の構造についての和を
とると、
Fc (g)
=
=
∑
f (g)e2πig·x
∑
t
t
fj (g)e2πig·(n1 a1 +n2 a2 +xj )
n1 ,n2 ,j
=
∑
t
e2πi(g·a1 )n1
∑
t
e2πi(g·a2 )n2
n2
n1
(2.9)
∑
fj (g)e2πig·xj
j
∑ (
)∑ (
)
δ g · at1 − n1
δ g · at2 − n2
= Fu (g)
n1
n2
ただし、j は、単位胞子内の原子サイト番号で、xj は j 原子の単位胞内での位置、fj は j 原子の
原子散乱因子。また、
Fu (g) =
∑
fj (g)e2πig·xj
j
は、単位胞内の散乱波の合成である結晶構造因子。 g の試料表面上への正射影を gS とおき、gS
8
空間の基底を表面構造の実格子基底に対応する逆空間の基底にとれば
Fc (g) = Fu (g)comb(gS )
(2.10)
とかける。従って、確かに gS のなす格子は結晶像のなす格子を表面上でフーリエ変換したもの(逆
格子)になっている。gS が逆格子をなすような g が回折スポットに寄与するから、逆格子点から
表面に垂直にのばした直線群(これを逆格子ロッドと呼ぶ)6 とエバルト球の交点が回折スポット
に対応する。実際にスクリーンに得られる回折パターンは、エバルト球から平面へ球の中心を光源
として投影したものである(図 1)。よって、表面の 2 次元逆格子とスクリーンの RHEED パター
ンは、平面から球面への平面に垂直な軸に平行な光線での投影と、球面から平面への球の中心を光
源とした投影の合成で関係づけられる。とくに、直線は円弧に写る。反射電子回折の場合エバルト
球の下側は結晶の陰になり観察できないが、この線をシャドウエッジと呼ぶ。シャドウエッジに平
行な方向に逆格子点(基本格子)を結んだ直線をラウエゾーンと呼び、シャドウエッジに近い方か
ら 0 次、1 次、
・
・とするが、これはスクリーン上では円弧として観察され(ラウエ環)、RHEED パ
ターン解釈の最も基礎的な手がかりとなる。どの円弧がラウエ環に相当するかは、菊池パターンと
の関係などによって判断する。
RHEED パターンにおいて十分に明るく観察されるのは、0、1 次のラウエゾーンの間の領域及
びその周辺である。この領域では、逆格子ロッドとエバルト球面はほぼ平行である(図 1 参照)7 。
従って、逆格子からスクリーン上の RHEED パターンへの変換で、像は逆格子ロッドの方向(我々
の装置では上下方向)に大きく拡大される。各スポットの形状を考察する際などは、このことを考
慮する必要がある。たとえば、逆格子ロッドが円筒形とすれば、対応する RHEED スポットは上
下方向に長い楕円のような形となる。
今回の実験では、RHEED パターンから強度分布が定量的に出せない。従って、回折パターンの
解釈としては、ボケ(ストリーク)の解釈を除いてスポットの位置のみ問題とする。したがって、
前述のフーリエ変換の諸性質を用いて回折パターンの解析を行うことが出来る。
RHEED では電子線を表面すれすれに入射するので、電子線の入射方向を表すときに入射ベクト
ルの表面上への正射影と視斜角(入射ベクトルと表面との角度)とで表現する。特に視斜角を知る
必要がないときには、正射影のベクトル指数で表現する。一般に RHEED パターンと逆格子の対
応付けが簡単になるように、電子ビームの入射方向を選ぶ。今回の実験では、入射方向は [112̄] と
[101̄] の 2 つである8 。
6 表面構造は、表面に垂直な方向に関しては周期構造を持たないから、表面構造の 3 次元逆格子は表面構造の 2 次元フー
リエ変換で得られた各スポットを表面に垂直な方向にのばしたロッド群となると考えることもできる。
7 これは RHEED の電子線の入射方向が表面すれすれなことによる。
8 この指数付けの仕方は次説の図に示す。
9
第3章
3.1
Si(111) 表面上の超構造
格子表面
一般に吸着層も含めた全体としての表面(吸着表面)を考え、この周期系の2次元ブラベ格子の
格子基底を ⟨at1 , at2 ⟩ とする。基板の理想表面の格子基底を ⟨as1 , as2 ⟩ とするとき、基板と吸着層のブ
ラベ格子の基底変換は (5) で与えられる。基板と吸着原子の相互作用の結果超構造が生じていると
すれば、超構造の周期性は基板表面の周期性を反映していなければならない。その意味では、さら
に強い条件として、基板表面に超構造の並進対称性を要請することも自然であるといえる。明らか
に、その必要十分条件は変換行列 G の係数が全て整数であることである。このレポートではこの
条件を整合性と呼ぶことにする。
at1 と at2 のなす角度が as1 と as2 のなす角度と等しい場合には、吸着表面の構造は簡単に
||at1 || ||at2 ||
×
− Rθ
||as1 || ||as2 ||
(3.1)
と表される。ただし、θ は at1 と as1 のなす角度である1 。我々の観察した超構造は全て α × β 型(α, β
は正の実数)で、かつ整合である。以下述べる構造に関する議論はすべてこのような条件を満たす。
Si(111) 理想表面(1 × 1 構造)は 6 回対称である(図 2)2 。格子基底ベクトルは互いに 120◦ の
角をなし、
1
d ≡ ||as1 || = ||as2 ||, as1 · as2 = − d2 2
(3.2)
が成り立つ。
以下に、RHEED パターンを解釈する際に有用になるため、2 つの場合について変換行列 G をも
とめておく。
m × n 構造 (m, n は正の自然数) m × n 構造では、
at1 = mas1 , at2 = nas2
とおけるから、
(
G=
よって、逆格子では、
at∗
1 =
1/m
0
0
1/n
)
1
1 s∗ t∗
a1 , a2 = as∗
m
n 2
となる。
1 誤解の生じない場合は、θ
は略記される。
RHEED パターンの写真の解析やビームの入射方向の表示には全て図 2 の指数付けで行っている。
すなわち、紙面の上方向は [1̄1̄2] 方向で、水平方向は [11̄0] 方向である。
2 このレポートでは
10
図 3.1: Si(111) 表面と結晶軸の方向
α × α 構造 (α は正の実数)整合性より、一般性を失うことなく
at1 = mas1 + nas2
とおくことができて、
||at1 ||
||at2 || √ 2
=
= m − mn + n2
d
d
が成り立つ。at2 は、at1 と 120◦ の角度をなし同じノルムを持つことを考慮すると、
α=
(3.3)
at2 = −nas1 + (m − n)as2
とおける。よって G−1 は、
(
−1
G
=
とおけて、
1
G= 2
α
(
m
−n
n m−n
m−n n
−n
m
)
)
となる。
表面原子が表面の 2 次元並進対称性をも変えてしまうように変位する構造を、表面の再構成
(reconstruction) という。再構成構造は共有結合性半導体表面では一般的に観察される。このよう
な再構成構造は、結晶面の方位、温度、作製法、吸着子の存在などに依存し、多彩である。再構成
構造の起源は、表面構造の影響を敏感に受ける表面状態の存在とも関係している。特に半導体表面
には、ダングリングボンド(非結合軌道)が存在するから、このエネルギーをできるだけ安定する
ために、多種多様な再構成構造が実現する。
Si(111) 表面は 7 × 7 超構造で安定構造となる。800◦ C 以上に熱すると 7 × 7 構造が壊れて 1 × 1
構造が現れる。7 × 7 のような大きな単位胞の中で、微視的な原子配置がどうなっているかについ
11
てを決定するのは一般には困難である。RHEED パターンの強度分布を、構造因子をコンピュー
タシミュレーションにより計算することで説明したり、STM 像を解釈したりすることによりおこ
なう。現在のところは、7 × 7 構造は、DAS(Dimer-Adatom-Stacking Fault) 模型が、詳細な STM
の実験を見事に説明し、最終的に確立された状態になっている [4]。DAS 模型の概念図を、図 3 に
示す。図で分かるように、この構造は 2 量体、吸着原子、積層欠陥の 3 つの要素を含み、第 3 原子
層に至るまで、バルクの結晶構造と著しく異なる原子配列をとっている。
図 3.2: Si(111)-7 × 7 構造 (a) 断面図 (b) 上から見た図
3.2
金属の蒸着とドメイン
表面上には、一般には構造や並進対称性の異なるいくつかの領域が存在する。各領域をドメイン
という。同じ構造でも並進対称性に位相のずれがあったり、方位のずれがあったりすると、表面に
複数のドメインが生じることがある。
7 × 7 構造 Si(111) 表面をアニーリングして、7 × 7 構造が形成するとき、一カ所から構造形成が
始まるのではなく、いくつかの場所から独立に構造形成を始めると考えられる。常温にして
表面が 7 × 7 構造で覆われた際に、下図のように周期構造にずれがある複数のドメインとそ
れらの間の境界が STM でも観察されている。
12
図 3.3: 7 × 7 構造の位相のずれたドメイン間の境界
回折波は以下のように解釈することができる。まず周期構造の位相のずれは、
pj = mj as1 + nj as2 (0 ≤ mj , nj ≤ 6)
と表すことができる。それぞれ位相のドメインの形状は、以下のように定義されたドメイン
の特性関数で表すことができる。
{
χDj (x − pj ) =
1 (x ∈ Dj )
0 (x ∈
/ Dj )
ただし、Dj は j 番目の位相のドメイン。(9) を用いて j ドメインの原子による散乱因子を求
めると、
Fcj (g)
∑
f (g)χDj (x − pj )e2πig·x
∑
= Fu (g)
χDj (x)e2πig·(n1 a1 +n2 a2 +pj )
=
(3.4)
n1 ,n2
∫
dxe2πig·x χDj (x − pj )comb(x − pj )
= Fu (g)
= Fu (g)e2πipj ·g χ̃Dj (gS ) ∗ comb(gS )
(3.5)
ただし、χ̃D は、χD の表面上での 2 次元フーリエ変換。これは、2 節ででてきた周期構造を
表す式に他ならない。すなわち回折パターンは逆格子のシャープなスポット(デルタ関数)
を χ̃Dj (gS ) の形で置換したものとなる。これは、ドメインの形状が回折スポットの形状や強
度分布(簡単にいうとスポットのボケ)に反映されることを意味する。異なる位相のドメイ
ンについて和をとると、
Fc (g)
=
∑
Fcj (g)
j
= Fu (g)
∑
e2πipj ·g χ̃Dj (gS ) ∗ comb(gS )
(3.6)
j
これはドメインの位相のずれの分布も回折パターンに影響することを意味する。
5 × 2 構造 同じ超構造の異なるドメイン間で格子の並進対称性が異なるときドメインに異方性が
あるという。超構造の格子基底の取り方は一意的ではないが、方位の異なるドメインどうし
13
図 3.4: 5 × 2 構造の周期構造の異方性
では、どの様に格子基底をとっても基底を一致させることはできない。5 × 2 構造では図 5 の
ように 6 つの異なる方位の周期構造をとり得る。
このように異方性のある複数のドメインからなる超構造の回折像は、方位の数だけの逆格子
の重ね合わせである。もちろん 7 × 7 構造の所で論じたのと同様にドメインの形や位相のず
れも回折パターンに反映される。
異方性の方位数は、超構造によって異なる。以下に、超構造とそれに対応する周期構造の方位の
数を表す。
m × m 構造 (m は自然数)
1
m × n 構造 (m, n は自然数かつ m ̸= n)
√
√
3 × 3構造
√
α × α構造 (αは無理数かつα ̸= 3)
3 もしくは 6
1
2
α × β 構造 (α, β はどちらか一方が無理数かつ両方実数かつα ̸= β)
6 もしくは 12
(証明)α × β 構造のドメイン異方性を決定するには、格子基底ベクトルの片方 at1 を与えて、周期
構造との対応を調べればよい。一般に at1 の与え方の自由度は、(13) より
α2 = p2 − pq + q 2 , p, q は整数
の解 (p, q) の個数の問題である。しかし、ここでは以下のような場合のみ問題とする3 。
1 つの at1 に対して 120◦ の角度をなすように at2 をとる仕方は 2 通りある。この 2 通りの格子基
底の取り方で実格子が一致する必要十分条件は、α が β の自然数倍であることもしくはその逆で
ある。
m × m 構造については、単に 1 × 1 構造を同じ向きに相似拡大しただけだから方位数が 1 であ
るのは明らか。
m × n 構造は 2 回対称である。at1 の方位のとり方が 6 通りあるが、2 回対称性より、反対向きに
とったものは同じ向きであるから、6/2 = 3 方位となる。at2 のとり方によって周期構造が異なり、
方位数は 6 となる。
α × β 構造は、基底格子ベクトルの向きが下地の 1 × 1 構造と超構造とでずれている。従って、
m × n 構造の場合と同様に at1 の方位のとり方が 6 通りある一方、as1 に関して鏡像関係になるよう
に at1 をとることもできるから、合計で at1 のとり方は 12 通りである。α × β 構造は 2 回対称であ
3 これ以外の場合が一般にあるかどうかは証明できなかったが、α ≤ 10 の範囲についてはここでの議論でつきているこ
とは確かめられる。
14
るから、6 方位となる。α が β の自然数倍かつその逆が両方成り立たないならば、at2 のとり方に
よって周期構造が異なり、方位数は 12 となる。
α × α 構造は 6 回対称であるから、方位数は 2 となる。
√
√
3 × 3 構造は、as1 に関して鏡像関係になるようにとった 2 つの at1 に対応する周期構造が一
致する。よって方位数は 1。
(証明終わり)
以上の証明は、Si(111) 面が 6 回対称であることを前提としている。しかし実際は Si(111) 面は
honeycomb(蜂の巣)構造であるので 3 回対称である。したがって、m × n 構造と α × β 構造の
方位数はそれぞれ 3 と 6 である。これと at2 が鏡像関係にある周期構造は、格子が一致したとして
も、単位構造は異なる。
3.3
Si(111) 微斜面
本実験で用いたのは、2◦ で [12̄1] 方向に傾斜を持つ Si(111) 微斜面である。
ステップがバンチングしていないと仮定したときの微斜面のテラス幅は次のようにして求まる。
[111] 方向のバルクの並進周期は、原子間距離を半径とした球に内接する正四面体(Si のバルクは
正四面体構造をもつ)の高さ h である。正四面体の各辺の長さは d ≡ ||as || = ||bs || と一致するの
で、d を用いて表す。単位ステップの高さは h に他ならないから、下図より、
図 3.5: Si のバルクの正四面体構造
1
h = || (a + b + c) ||
3
1√ 2
=
a + b2 + c2 + 2 (a · b + b · c + c · a)
3√
6
=
d = 0.82d
3
と求まる4 。テラス幅 l は
(
π )
l sin 2 ·
=h
180
4 図の a は、正四面体の外接円の半径であり、格子定数である。a と d との関係は外接円の中心が重心でもあること
0
0
に注目すると、
1
3
a0 = || (a + b + c) || = h = 0.61d
4
4
である。
15
より、
l≃
180
h = 23.4d
2π
となる。
ところで RHEED パターンに逆格子を当てはめて解釈するのには、周期構造と、雑音(非周期
的要素–例えば特定のドメインの形など)に分離して考えるのがわかりやすい。従って微斜面の解
釈としては、ステップのバンチングが、期待値のまわりに小さく分布していて、かつテラス幅も一
定とする。すなわち、微斜面が一定の大きさのテラスとステップからなる階段状の構造であると考
えるのである。これは、もとの構造の周期構造と、テラス上の周期構造の重ね合わせとなる。従っ
て回折パターンはもとの構造を結晶構造因子として持つテラスの周期構造の逆格子であると解釈で
きる。微斜面はステップエッジに垂直な方向(これを微斜面の方向と呼ぶことにする)にのみ周期
構造を持つから、微斜面の Fc (g) への効果は微斜面方向の 1 次元回折として考察できる。
Fc (g)
∝ Fu′ (g)
∑
exp(2πing · M a) (テラス配列の周期構造)
n
∝
N
∑
exp(2πing · a)
exp(2πing · M b)
n
n=1
=
∑
√
LN (g · b)comb(M g · a)
(3.7)
ただし、a, b は、それぞれ微斜面方向の 1 × 1 構造と超構造の並進基本ベクトル(一般には格子
基底ベクトルと一致しない)、M, N は単位テラス内の基本構造と超構造の微斜面方向の周期数で
LN (x) は Laue 関数
LN (x) ≡
sin2 (N πx)
sin2 (πx)
回折強度 I は、
I ∝ |Fc (g)|2 ∝ LN (g · a)
であり、回折スポットは微斜面方向に半値幅
1
∗
N ||b ||
をもつ。テラス自体の周期性の効果は (17) の
櫛関数の部分に反映されていて、これは逆空間上では微斜面方向に 1/M 倍周期の回折スポットと
なる。従ってこれは、テラス上の超構造の逆格子に吸収されてしまう。
以上より、RHEED パターンでスポットの拡がりの方向と微斜面の方向は平行である。また、詳
細にスポットの強度解析をすれば、スポットの半値幅からステップのバンチングの度合いも分かる
かもしれない。
16
第4章
装置概要と実験手順
図 4.1: RHEED 装置概略図
4.1
真空関連
表面の観察には、まず清浄表面の作成が不可欠である。さらに、RHEED のフィラメントや、イ
オンゲージのフィラメントなどの寿命を延ばすためにも、表面構造解析の実験には、超高真空が
必要となる。ターボ分子ポンプで荒引きした後、イオンポンプで真空度が良くなるまで排気する。
ベーキングと、フィラメント、るつぼ、イオンゲージなどの脱ガス (degas) を行って超高真空を達
成する。漏れ探しは、エタノールを用いてプローブ法で行う。ベーキングの後は、Ti サブリメー
ションポンプを 44A × 2min 作動させて、イオンポンプをつける。
イオンゲージ イオンゲージは、フィラメントから放出された電子の衝撃により残留ガス分子を電
離し、イオンコレクタによってイオンを捕集し、そのイオン電流によって真空度を測定する
ものである。10−6 Pa 以下の圧力で使用する。
ターボ分子ポンプ ターボ分子ポンプは高速で回転する羽で気体分子をたたきですことで圧縮する
多段式のタービン圧縮機である。羽根の回転数は、∼ 105 min−1 にもなる。このとき羽根の先
端の速度は 500m/s にもなり、残留ガス分子の速度と同程度である。圧縮された気体は補助
ポンプ(油回転ポンプ)によって排出される。羽根と分子の衝突によって分子にエネルギー
17
図 4.2: (a) イオンゲージ (b) スパッタイオンポンプ
と運動量を与えるという動作原理であり、質量の大きな分子ほど圧縮比は大きい。炭化水素
に対する圧縮比は十分大きいので、補助ポンプの油蒸気は逆流しない。しかし、超高真空を
達成するにはチャンバーの中に油があるとベーキングなどでも排除しにくいため、油の逆流
にはとりわけ注意を要する。排気速度の大きい油回転ポンプを使わない所以でもある。
イオンポンプ 10−6 Pa 以下の超高真空領域で使用するポンプ。後述のサブリメーションポンプと
組み合わせて用いる。スパッタ型では、中央部の陽極を挟んで Ti 板の陰極をおき、これを約
0.1T の磁場の中に保持しておく。陰極と陽極の間に 3∼5 kV の高電圧をかけると冷陰極放電
がおきるが、磁場のため電子は陽極に達することができないでしばらく空間を漂う。この電
子によって残留ガスは効率よく電離され、生じたイオンは陰極をたたいて Ti をスパッタさ
せる。ポンプ内の各部分に付着した活性 Ti 面によって、中性の分子や励起された分子がと
らえられる。
Ti サブリメーションポンプ イオンポンプによって放出されたイオンは、Ti 板によって捕集され
る。ある程度以上捕集すると、効率が悪くなるので、適宜 Ti 板表面をフラッシングして、Ti
を蒸発させる。とばされた Ti は、チャンバー壁面へ吸着される。本実験装置では、40A で
1 min 運転する。
プローブ法 チャンバーのパッキング部分にエタノールをさす。もし漏れがあれば、エタノールが
チャンバー内に浸透し、内部の圧力が増加する。特にイオンゲージがエタノールに対して感
度が高いことを利用している。
ベーキング、脱ガス 常温で排気を行うと、チャンバーの壁面やイオンゲージなどに吸着した気体
分子(主に水蒸気)がゆっくりと放出される。真空度を早くよくするために、チャンバーを加
熱して吸着分子をとばす方法をベーキング、イオンゲージなどの場合を脱ガスという。本実験
18
では、チャンバーを電熱線で巻き Al 箔で覆って加熱した。10−9 Torr 程度になったらベーキン
グは終了して良い。Au、Ag のるつぼの脱ガスは、本実験装置では、それぞれ 8A で 5 min、
6.4A で 5 min おこなう。また、イオンゲージの脱ガスは、degas モードで自動的に行う。
4.2
電子銃
図 4.3: 電子銃
電子銃の構成は図 9 のようになっている。RHEED の電子線は波長が短く、非相対論的領域で与
√
えられる近似式 λ = 150.4/E に従って、加速エネルギー E は 5 ∼ 30kV 程度が適当である。本
実験では、-15V に電位が調整されたフィラメント (F) に約 2.2 ∼ 2.3A 流すとフィラメントが熱せ
られて電子が出る。アノード (A) は接地されていて F に対して正になり、電子は F から図 10 の右
側に引き出される。ウエーネルト円筒 (W) は負の電位になっていて、その電位を調整することに
よって出ていく電子線の量と太さを調節する。磁場レンズ (L) は電子線を絞るために用いられてい
る。偏向コイル (D) は、電子ビームの方向を調整するのに用いる1 。
磁場レンズ L の磁場の方向は、ビームを向けたい(収束させたい)方向と平行にとる。図で、z 軸
(ビームを向けたい方向)に垂直な速度成分を vr とおくと、電子はローレンツ力 evr BL を受
け、x − y 平面に平行に、半径
mvr
eBL
の円運動をする。電子の速度の z 成分も考慮すると、全
体として電子は z 軸方向に螺旋運動する。従って、ビームの拡がりを抑えることができる。
偏向コイル D の磁場は、x 方向を調整したいならば、y 方向に By を、y 方向を調整したいならば、
x 方向に Bx をかける(電子ビームの速度は、ほとんどスクリーンに垂直であるとみなせる)。
もちろん BL , Bx , By は全て制御可能である。
4.3
Si(111) 面への Au 蒸着
物理学実験の「表面物性」のテキストその他にのっている相図の Si-Au 超構造を得るべく、Au
を蒸着しアニーリングを行う。蒸着は、Au、Ag のるつぼでそれぞれ 8.0A、6.4A でおこなった。
1 Ehrenfest
の定理に関連して、定常な磁場においては電子の運動方向は古典的に議論できる。
19
図 4.4: 電子銃のレンズと偏向コイルの磁場のかけ方
ただし、蒸着レートを一定にするため、蒸着前にあらかじめるつぼを高温にしておく。蒸着をする
かしないかは、るつぼと試料の間にシャッターをおいて、これを開閉することによって行う。Au
をつけすぎてほしい構造が得られなかったりするときは、適宜フラッシングを行う。
√
√
√
√
構造の名称で注意すべきなのは、α 3 × 3 と β 3 × 3 の違いである。前者は、被覆率の比較
的低い領域で見られ(STM でも観察されている)、ドメインが後者に比べて大きい。それに対し、
後者はドメインの境界が複雑に入り組んでいる。前者は RHEED の回折スポットの半値幅が広く、
後者は狭く見えるが、3 節で論じたようにこれはドメインの形状を反映している。また前者から後
者へは連続的に変化することが知られているが、その変化のメカニズムについてはまだ確定的なモ
デルは提出されていない。
相図(構造状態図)一般に、横軸に物質の蒸着量、縦軸に温度をとった平面上に、ある特定の経路
に従って構造を得るときに、構造のでき方を記録したものを相図 (phase diagram) と呼ぶ。
この場合の相図において構造形成が決定的に経路に依存することを注意する必要がある。さ
らに、構造形成を一度達成すると、その構造が常温でも保存されることも多い。従って、相
図には経路依存性その他の情報が明記されている必要がある。常温で蒸着をしてから、温
度を上げて変化を見るのと、温度を一定に保って蒸着を行い変化を見る方法が一般的だが、
本実験では後者の方法で変化を観察した(常温でも構造は保たれる)。ただし、6 × 6 構造
については、蒸着を止めてから、アニーリング温度から温度をゆっくりと下げて形成させる
√
√
方法をとる。実際、同じ蒸着量でも、急冷すると 6 × 6 構造は現れず β 3 × 3 が現れる
√
√
(β 3 × 3 構造は 6 × 6 構造のアモルファス状態とみなすことができる)。この事情から図
11(a) の Si(111)-Au の相図では、6 × 6 構造の領域は、点線で描かれている。
アニーリング 600◦ C くらいに Si 基板の温度を保って Au を蒸着すると、Au 原子が表面上を拡散
して構造を形成すると考えられている。このように、表面を金属原子に拡散させる方法をア
ニーリングという。我々の実験装置では、通電加熱によって Si 基板の温度を上げるが、ア
ニーリングに要する電流は 0.6A である。
フラッシング Au と Ag は、Si と合金を作らないことが知られていて(このことは Bimetal Alloy
Phase Diagram などで独立に調べることが出来る)、十分に温度を上げてやると表面からと
ばすことができる。このようにして、金属を表面から取り除く方法をフラッシングという。
フラッシングは 10A で 1 秒くらい通電する。
シリコンカーバイド アニーリングで温度を上げすぎたりすると、 チャンバー内の残留ガスとシリ
コンが反応してシリコンカーバイド SiC が生じる。これは RHEED パターンに明確なスポッ
20
図 4.5: (a)Si(111)-Au と (b)Si(111)-Ag の構造状態図。ML(mono layer) は、吸着量の単位で、1ML
は基板表面の最外層原子数である。
トとして現れるため、すぐに判定できる。SiC が生じたらフラッシングでとばす。
√
√
他に、Si(111)-Ag-Au 21 × 21 構造を観察した。今度は、Ag の相図(図 11(b))に従い、ま
√
√
ず Si(111) 表面上にアニーリングしながら Ag 3 × 3 構造を作る。その上に、常温で Au を蒸着
√
√
√
√
して、 21 × 21 構造を得る。我々の実験装置では、Ag は 2 分蒸着して 3 × 3 構造が得られ、
√
√
さらに Au を 20 秒蒸着して 21 × 21 構造を得た。
Si 板の加熱は、通電によって行う。Si は半導体であるから、温度が上がると抵抗が下がる。従っ
て、一定の電流で加熱を行うには、constant current mode で電流を制御することが重要である。
21
第5章
5.1
結果と考察
RHEED パターンと逆格子
得られた RHEED パターンは、モノクロ写真にとってプリントした。既述の考え方を用いて得
られた、それぞれの写真に対応する逆格子を付随させて描いてある。
微斜面の RHEED パターンについては、スポットの拡がりの方向は [12̄1] 方向であり、確かに微
斜面の方向と一致している。また、[112̄] 方向入射の 7 × 7 構造の写真を見ると、スポットの半値幅
は 7 倍周期の Laue 環の間隔の 1/3 程度に見える。これは、ステップがあまりバンチングせずに、
テラス幅が計算値通りの 23d 程度であることを示唆していると考えられる。
5.2
(111) 面とその微斜面の効果
(111) 面については、回折パターンは基本的に 3 回対称である。これは、基本構造のの 1 × 1 構
造との整合性を考えれば自然なことである。周期構造の方位の数も 3 節で論じたとおりである。
5 × 2 構造については、3 つの方位の周期構造が観察された(図)。3 節で求めた周期構造の方位
の数は 6 となるはずであるが、後に述べるように 2 倍周期はストリークであり、純然たる周期構
造はなさないため、ドメインの異方性は 5 × 2 構造を 5 × 1 構造であるとみなして考えると確かに
方位数 3 となりつじつまが合う。電子ビームの入射方向とドメインがスクリーン上に反映される強
度の関係がはっきりしないため、図の [1̄1̄2] 方向にストリークが走るドメインとその他のドメイン
とではどちらが優勢かわからないが、[2̄11] 方向にストリークが走るドメインと [12̄1] 方向にスト
リークが走るドメインとでは、明らかに後者の方が優勢である。非対称性が生じた原因としては、
何らかの物理的作用が特定の方向に働いていると考えられるが、清浄表面に関して考えられる非対
称性は通電加熱の通電の方向のみである。しかし、次小節で論じるがこの非対称性の原因は少なく
とも通電方向とは考えられない。
√
√
微斜面についても、やはりドメインの指向性を観察することができる。 21 × 21 構造にはドメ
イン指向性は見られなかったが、5 × 2 構造については微斜面方向にストリークがあるドメインの
√
√
み観察された。 21 × 21 構造にドメインの指向性が見られないのは、2 つのドメイン1 の方位が、
微斜面の方向を軸として線対称であることによる。これは、微斜面の方向が [12̄1] 方向であるため
である。もし、微斜面が別の方向に加工されていたならば、指向性が生じる可能性はある。(111)
面についてもその微斜面についても 5 × 2 構造のドメイン指向性の物理的解釈には、この構造の物
理的性質に関する情報が必要である。
1
√
21 ×
√
21 構造の方位数が 3 であることについては 3 節参照。
22
5.3
5 × 2 構造
5 × 2 構造は、すでに述べたように純然たる並進対称性を持たない。このことは、観察された
RHEED パターンの 2 倍周期的構造がスポットでなく 5 倍周期の方向にのびたストリークに対応し
ていることからもわかる。3 節で考察されたように、十分に広い範囲で並進対称性を持つ結晶は、
その周期構造を実格子に対応づけることができ、その 2 次元フーリエ変換として逆格子を考えるこ
とができるから、回折パターンに長いストリークは現れない。
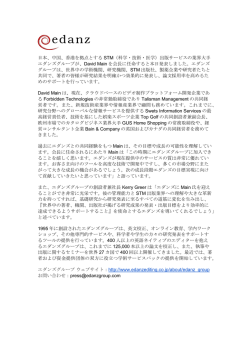
ストリークが生じる原因を考察するため、とりあえず STM 像を図 12 に示す。
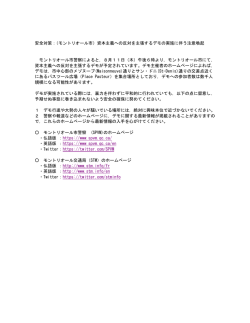
図 5.1: Si(111)-Au5 × 2 構造の STM 像(日立中央研究所の長谷川氏による)。像の中に 5 × 2 構
造の単位胞を示している。白く見えているものが吸着 Au 原子と考えられている。
図 12 に見られる縞模様は 2 倍周期の方向にのびていて、5 倍周期の間隔で暗線が並んでいる。
これは、5 倍周期性は明確に現れていることを意味する。一方白く見えているものが吸着 Au 原子
であると考えられるが、2 倍周期のストリークは、Au 原子の配列によって生じると考える。解像
度が低くて良くはわからないが、図 12 を素直に解釈すると、Au 原子との相互作用によって生じ
る Si 基板の再構成構造は 5 × 1 構造であると考えるのが自然と思われる。しばしば、5 × 2 構造が
5 × 1 構造と呼ばれることはこの意味でも自然である。
2 倍周期性がスポットでなくストリークとしてあらわれる理由を、5 倍方向の Au 原子の配列に
位相差があるという形で説明を試みたモデルは多く提出されている。しかし、天下りのモデルでな
く素直に STM 像を解析したものとして、垣谷らのシミュレーションが注目できる [5]。5 × 1 単位
構造の中に 1 つ吸着 Au 原子の吸着可能なサイトがある格子ガス模型で Au 原子の吸着位置を記述
する(図 13(a))。この模型のもとで下地の 5 × 1 構造の縞模様の各列に一次元鎖を対応させ、一
次元鎖方向の位置相関関数 < nlm nlm′ > を計算すしたものが図 13(b) である。ただし nlm は l 番
目の鎖内の m 番目の吸着サイトの占有数で、Au 吸着原子の有無により 1 か 0 の値をとる。図か
ら読みとれる興味深い性質としては、第 2 隣接サイトの吸着確率がほとんど 0 であることである。
垣谷らはさらに、一次元鎖間の相関について調べている。それによれば、一次元鎖間の位相差を 4
段階に不連続にした一次元 XY 模型を設定することで説明できる。
以上のように、5 × 2 構造は単純な周期構造からはほど遠い形をしている。なお、回折パターン
を計算するのを試みたものとしては H. Daimon et al 1990 [9] などがある。
一方ドメイン指向性は、現在までの研究成果からすると、5 × 2 構造の成長過程に関係している
23
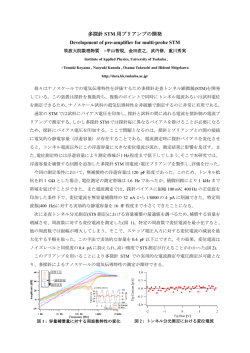
図 5.2:
と考えられる。金を Si(111) 面に蒸着しながら、STM で in situ2 に 5 × 2 構造ドメインの成長を観
察すると、列方向に成長することが分かる(T. Hasegawa et al 1992 [6])。また数々の研究から、
5 × 2 構造は Au 原子が最外層の Si 原子と置き換わって構造を形成していることが推定されてい
る。一番単純な考察としては、STM 像で 7 × 7 構造の領域と、その一部が蒸着された Au 原子と
相互作用することによって形成した 5 × 2 構造のドメインの境界を観察すると、明らかに 5 × 2 構
造のドメインの方が低いものが多く見られることがあげられる(図 14)。もし、単に Au 原子が吸
着原子(最外層原子)として Si 基板と相互作用して構造を形成しているならば、7 × 7 構造より
高くなるはずである。先の長谷川氏による観察で過剰の Si 原子がアイランドを形成したり、長尾
氏による同様の STM による in situ 観察でもステップの形が変化したりすることが確認されてい
る。しかし、形成過程では Au 原子は一次元鎖内で自由に拡散していることが推定される。我々の
RHEED による観察の結果では、アニールしている途中では 2 倍周期のストリークが見られない。
また、STM の観察結果でも、常温では Au 原子と推定される突起が確定的な位置に観察されるの
にたいし、高温では突起が観察されない3 。ドメインの成長に Au 原子の拡散が影響しているのは
明らかである。したがって列方向に Au 原子が拡散しやすいとすれば、成長方向が列方向になるの
は自然であると考えられる。
STM の観察によって、微斜面に関してはステップエッジと平行な方向に列をもつドメインのみ
成長することがわかっている [7, 8]。これに関しては表面上の結晶成長の理論で、次のようなもの
がある。まず、アニーリングによって、Au 原子がテラス上を拡散してステップエッジに集中する。
そして、キンク4 からドメインが成長を始めるというものである。5 × 2 構造のドメインは、ステッ
2 in
situ とは、何か試料に操作を施しながら同時に観測することである。
の針のスキャンスピードに対して Au 原子の運動速度が十分に速い。
4 ステップエッジは一般に 1 × 1 構造の基本並進ベクトルに平行な直線と、それらをつなぐ短い滑らかでない境界とか
3 STM
24
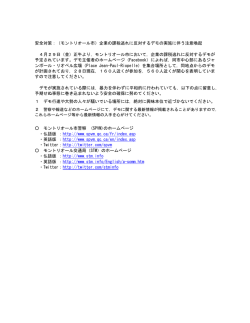
図 5.3: 7 × 7 構造と 5 × 2 構造のドメインの STM 像(東大物理学研究科長谷川研の長尾氏提供)。
5 × 2 構造のドメインは 7 × 7 より低いものが優勢であることがわかる(図の左から STM の針を
スキャン)。5 × 2 構造のドメインにははっきりと縞模様が見える。
プエッジの直線に沿って高い方のテラスの方向に成長して、このテラスの Si 原子と置換して構造を
形成していく。置換によって生じる過剰の Si 原子は上下のテラスを拡散したりして5 、別のステッ
プエッジでさらに蒸着された Au 原子とともに 5 × 2 構造のドメインを形成していくと考えられる。
ステップエッジに平行な方向に優先的にドメイン成長がおきる原因の一つとして、置換によって生
じる過剰の Si 原子が低いテラスの方に拡散するほうがエネルギー的に有利であり、高いテラスの
内側に向かってドメインが成長するのに比べて成長速度が速いということも考えられる6 。
次に、我々の実験結果からは、5 × 2 構造の形成の通電方向に対する依存性はないといえる。既に
述べたとおり、ドメインの形成の方向は列方向であり、かつその原因が一次元鎖内の Au 原子の拡
散であるとすれば、列方向と通電方向は一致していなければならない7 。さて、先に述べた RHEED
パターンの解釈を実空間の言葉で表すと、[1̄01] 方向に列ののびるドメインが最も優勢であり、[11̄0]
方向に列ののびるドメインと [01̄1] 方向に列がのびるドメインとはどちらが優勢かはわからない。
通電方向は [11̄0] 方向、[12̄1] 方向、[21̄1̄] 方向のどれかであるが8 、各場合について通電方向のドメ
イン成長への影響が無いであろうことを背理法により考察する。まず、通電方向が [11̄0] 方向の場
合は、影響があるとすれば [11̄0] 方向に列ののびるドメインが最も優勢でなければならないが、観
察結果はそうではない。つぎに、通電方向が [12̄1] 方向の場合は、最も優勢なドメインの列の方向
が通電方向と垂直になり矛盾。最後に通電方向が [21̄1̄] 方向の場合は、対称性より [1̄01] 方向に列
ののびるドメインと [11̄0] 方向に列ののびるドメイン優勢度が等しいはずであるが、観察結果は前
らなる(図 15 参照)。この滑らかでない部分をキンクという。
5 Si 原子が 7 × 7 構造上を拡散する様子は STM で観察されている。
6 もちろんキンクがステップエッジに垂直であることも原因の一つであると考えられる。
7 もし、原子拡散に通電方向の依存性があるならば、通電方向が他の方向に比べて拡散しやすいと考えるのは自然であ
ろう。
8 Si ウエハーをセットした向きを記録していないため通電方向もわからない。
25
図 5.4: (a) ステップエッジ周辺の模式図 (b) 微斜面の Si ウエハーの模式図
者の方が優勢である。以上の考察より、Si(111) 表面の RHEED パターンでドメインの方向によっ
て回折パターンの強度が異なったのは、統計的なゆらぎやドメインの形状の効果であると考えら
れる。
26
第 II 部
電子ビーム蒸着源の作製と性能評価
第6章
コンセプト
電子ビーム蒸着源は、平衡蒸気圧が低く、るつぼに入れて加熱するなどの方法で蒸着困難な金属
の蒸着源として用いる装置である。既存の蒸着源に比べて、以下のような利点がある。
1. 効率が良く、従来の装置に比べて低いパワーで運転できる。
2. 金属を液化せずに蒸着することが可能であるため、蒸着源を任意の方向に向けることがで
きる。
3. 蒸着する金属を半径の小さいロッド(針金状のもの)にすることにより、蒸着される金属の蒸
気ビームの発射源を小さくすることができて、覆い蒸着において精度を高めることができる。
4. 従来の装置に比べて、構造が単純であるため、製造コストを抑えることができる。
図 1 に電子ビーム蒸着源の概念図を示した。蒸着源は、軸対称である。アース電位でつながって
図 6.1: 電子ビーム蒸着源をその軸に沿って切った断面の模式図
いる電場シールド S、円筒 C、
(S、C はステンレス製)覆い L(Ta 箔)、接地された円形フィラメ
ント F、電位 V ∼ 1kV の金属ロッド M からなる。フィラメント F は仕事関数の十分に低い材質
(本実験では Th-W)で作られていて、F に十分大きな電流を流すと、熱電子が放出される。放出
された熱電子は、高電圧により加速されて、金属ロッド M の先端に集中する(後に示すように、
図 1 のような形状で実際に電子ビームを M の先端に集中させることは可能である)。M の電位 V
を調整することにより、金属を溶けない程度に高温にして、覆い L にあけられた穴から M から放
射された金属原子を蒸着することができると考えられる。電場シールド S、円筒 C、覆い L は、電
子を加速するための電場を構成する役割を担うが、L は、F から放出されるタングステンなどが試
料に蒸着されないように覆う役割も持つ。
28
第7章
simion によるシミュレーション
静電場計算ソフト simion を用いて、どのような形状にすれば、フィラメント F から放出された
熱電子が効率よく金属棒の先端に集中するかをシミュレーションした。熱電子を M の先端に集中
させる意義は、M 内部に十分大きな温度勾配が生じていることが推定されるためである。
simion は、与えられた導体の分布に対して、真空部分の電位を数値計算する。計算された電場
中に真空中の任意の位置から任意の運動量の電子をとばしたときの飛跡も計算することができる。
後に示す計算結果はこのような電場とその中でのフィラメントから放出された熱電子の飛跡であ
る。熱電子は、フィラメント F から等方的に放出されると考えられるため、放出方向を 6 °きざ
みで変え 60 サンプルとった。また熱電子の運動エネルギー K の初期値を 0.2eV とする。ただし、
電子が 1 つずつ放出される場合の計算であるので、複数の電子が飛んでいるときの電場に与える影
響は扱うことはできない1 。
調整できるパラメータは、 図 1 の A, s, r, l, d(M の先端が電場シールドより外側にとること
も可能で、そのときは d < 0 と定める)とする。ただし、加工精度を考慮して、s, r については
2mm のばらつきを許した。また、複数回 1 つの金属棒に対して蒸着を行うことを考慮して、d は
5mm 可変であるようにする。
なお、本実験では円筒 C 電場シールド S は発注した規格品を用いたため、R = 16mm, a = 3mm
とする(S についてはその厚さは 5mm である)。M の直径も 2mm に固定する。また、アパーチャー
の半径 A は、フィラメントからの視斜角を十分に大きくし、かつ金属の蒸着量を確保するために
は、その大きさの範囲は限られる。本実験では、A = 4mm とした。なお、やはりフィラメントか
らの直接の蒸着を防ぎ、かつアースの壁に近づきすぎないようにするため、フィラメント F の位
置を s∼6mm, r∼10mm とする。
以上のような条件下で、パラメータを変化させて定性的な電場の性質を見る。なお、 V = 1kV
とした。
シミュレーションの結果
図は、装置をその軸を通る平面で切った断面内での電子の軌跡を描いた図と、同じ平面上の電位
分布をメッシュで表示した図(PE 図)の 2 種類である。
1 後に示すが、実験によって飛んでいる電子による空間電荷効果が無視できないことがわかった。
29
1. l 大のとき(l∼4cm)
図 7.1: (a) l = 40mm, d = 27mm (b) l = 40mm, d = 7mm (c), (d) l = 40mm, d = 0mm: (a) d
が大きいと電子ビームは、棒の先端ではなく途中に向かう。(b), (c) d が十分に小さければ、電子
ビームは、一応 M の先端を中心に分布する。しかし、とくに (c) でビームが大きく拡がっていて、
一部がアースに取り込まれている。(d) PE 図を見れば分かるが、これはフィラメントの周囲の電
位勾配がほとんど 0 なことによる。
30
2. l 小のとき(l∼3cm)
図 7.2: l = 30.0mm, d = 7.5mm: d = 7.5mm のときは、ビームの収束があまり良くないことが分
かる。
31
d = 0 ∼ 5mm のときは、ビームがよく M の先端に収束している(図)。この結果を満足できる
解とする(最適解かどうかは分からない)。
図 7.3: l = 30.0mm, d = 5.0mm
32
図 7.4: l = 30.0mm, d = 2.5mm
33
図 7.5: l = 30.0mm, d = 0mm
34
3. 金属棒 M が溶けて先端が球形になった場合
図 7.6: l = 30mm: 金属棒 M が溶けて先端が球形になった場合もビームは先端に収束している。
4. 試作
ビームを集中させる 1 つのアイデアとして、電場シールド S の内側に、漏斗型のアース電極をつ
けることを考えてみた。しかし、実際には目立った改善は見られない。
図 7.7: l = 30 mm: 漏斗型アース電極をつけた試作品
フィラメント F に正の電位を与えた場合、電子ビームは拡がらずに細く収束する。したがって
もし可能ならば、フィラメントに正の電位を与えることが望ましい。
シミュレーションの結果の定性的考察
1. フィラメントの周囲からの電気力線が金属棒の先端に収束するには、d が十分小さくなけれ
ばならない。なぜなら、後方をアースでシールドしていないと金属棒の先端でない部分に電気力線
が向かってしまうからである。
2. 同様の理由により、電場シールド C は、十分よく電場をシールドしなければならない。すな
わち、a は、放電の生じない程度に、できるだけ小さくすると良い。
35
図 7.8: l = 30mm: フィラメントに正の電位を与えた場合
3. 電子ビームの拡がりを抑えるためには、フィラメント周囲の電位勾配が小さすぎないことが
必要である。そのためには、F から M の距離が十分に小さいことが必要であり、従って、1. の結
論を考慮して l は 3cm 程度には小さくする必要がある。
36
第8章
8.1
実験と結果
膜厚計による蒸着源の性能評価
膜厚計は、水晶板に物質を蒸着させ、振動周期が蒸着された物質の質量に応じて変化する(振動
数は蒸着量の減少関数)ことを利用して膜厚を測定する。膜厚は、次式により与えられる。
Tf = lq
dq fq − fc
df fq
(8.1)
ここで
とくに
fq −fc
fq
Tf
= 膜厚
dq
= クリスタルの密度
df
= 蒸着膜の密度
lq
= クリスタルの厚み
fq
= クリスタルの共振周波数
fc
= 蒸着膜が付着した時のクリスタルの共振周波数
≪ 1 のときは、一次近似で
Tf df ∝ fq − fc
となる。左辺は蒸着質量である。我々の知りたいのは蒸着原子数であるから、これを蒸着膜の原子
の質量数で割れば蒸着原子数がわかる。長谷川研と井野研では、金を蒸着した場合の膜厚計の周波
数変化は 7Hz/mono layer であるというデータが出ているので、これをもとにニオブの場合の周波
数変化を求めると、3.3Hz/mono layer ということになる。
蒸着源の性能を評価するために、V 、フィラメント電流 IF を変えて、一定距離(蒸着源からの
距離約 10cm)離れた蒸着源からの蒸着速度を膜厚計で測定する。しかし、膜厚計の振動数は温度
依存性がある(増加関数)ため、冷却水を流して膜厚計の温度が変化しにくくしているが、それで
も温度変化が抑えられない場合は、振動数の蒸着量依存性より温度依存性の方がはるかに大きいこ
ともあり得る(実際我々の実験では実験のはじめの方では温度依存性の方がはるかに大きかった)。
この測定は、蒸着する金属として Nb を用いて、蒸着源の使用の基本的条件を出し、一定の条件
のもとでの蒸着レートを出すことを目的としている。なお、蒸着レートと金属の温度の関係に目安
を付けるのには、蒸気圧表が役立つ(図 10)。今回試作した電子ビーム蒸着源が大きな効力を発揮
するのは主に蒸着温度が高温である金属を蒸着するときであるため、高温領域の蒸気圧表を載せ
た。我々が本実験で蒸着を試みたニオブは金よりもはるかに高温で同じ圧力の蒸気圧平衡に達する
ことがわかる。これは、蒸着するさいにニオブ原子を大量に飛ばすにはニオブを高温にしなければ
ならないことを意味している。
結果
37
図 8.1: 蒸気圧表
38
高電圧 V やフィラメント電流 IF を徐々に大きくして熱電子の M への放出電流の電力を調整し
た。膜厚計でデータが蒸着量に有為に依存している領域では、蒸着レートが大きいため Nb の温度
が高いことが必要であり、注意しないと Nb ロッド M が溶けてシールド S に接触してしまう。ま
た、IF は 2.5A 未満で加熱しないと溶けて切れてしまう。これらのことを考慮して操作の条件を決
定していく必要があることがわかった。
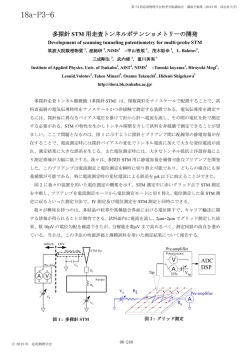
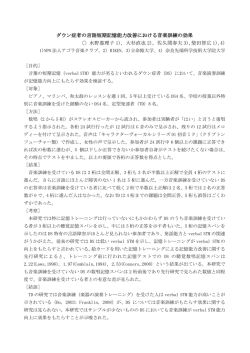
一方膜厚計によって蒸着レートを測定した結果は下図に示した。このデータは、次のように考察
図 8.2: Nb の蒸着時間と膜厚計の周波数変化
することができる。まず蒸着時間が短い領域では周波数が上がっているが、これは蒸着源の運転開
始に伴う温度上昇の効果である。ある程度の時間運転すると温度が平衡状態に達すると考えられ
る。この温度で蒸着を続けることによって蒸着膜の質量による周波数の降下が見られるのである。
したがって、蒸着レートを求めるには、後半の周波数が減少している領域を直線で fit してその傾き
の絶対値から換算すればよい。このデータから、蒸着源の運転のパワーが大きいほうが蒸着レート
が大きいことも確かにわかる(20W-4.9 × 10−2 mono layer/sec, 39W-8.3 × 10−2 mono layer/sec)。
なお、測定後再びチャンバーを開けた際、肉眼で、Nb が膜厚計及び円筒 C の内壁に付着して灰
色になっていたことが確認された。従って、直接にもかなりなレートでの蒸着が可能であることが
確認された。
8.2
蒸着源の改造
改造の動機は、フィラメントの消費電力を抑えること(これによってガスの放出を抑えることが
できる)である。改造した点は次の通りである。
39
• もとのバージョンでは、フィラメントの形状を保つため、フィラメントを 3 カ所で支えてい
た。フィラメントからサポートを通じて逃げる熱を減らすため、サポートを電流導入端子の
みの 1 カ所とした。さらに、円筒 C の熱容量を減らし C に逃げる熱を減らすため、C をメッ
シュで作ることにした。
• 金属棒 M は熱伝導が大きすぎると考え、直接 M をステンレスのサポートで支持するかわり
にタングステンワイアー 3 本で支えることにした。しかし、これでは安定性が得られないの
で次の試作品では細長いタンタル箔を直角に折り曲げてサポートで支えることにした1 。ま
た、金属が融解しても S とショートしないように金属の受け皿をつけた。M の断熱性が高く
なれば、放出電流の電力を抑えることができ、従って V 一定のもとでは IF を抑えることが
できる。
改造バージョンの蒸着源の蒸着レートの実験の結果は下図に示した。この結果から求めた蒸着性
能は、2 つの測定結果を平均して 45W-1.7 × 10−1 mono layer/sec である。改造前に比べて性能が
上がっていると言えるであろう。
以下の実験はすべて改造後の蒸着源でを行った。
8.3
微小電流計による Nb 蒸着レートの測定の試み
膜厚計のかわりに、蒸着レートを測定する試みとして、シャッターからアースに流れる電流を測
定することを考えた。V の電圧で加速された熱電子は、残留ガスやとばされる Nb 原子の一部をイ
オン化する。このイオン化された陽イオンがシャッターに到達するときに流れるイオン電流を測定
しようというのである。熱電子は全て M に取り込まれると推定されるから、もし Nb の蒸着量と
イオン化率が残留ガスのイオン化率に比べて無視できないとすれば、その効果を観察できるであろ
うと考えたのである。
結果
電圧を V = 1.5kV と一定にして、フィラメント電流を増加させたら、図 13 のような結果を得
た。この結果は、まず全ての熱電子が M に取り込まれるのではなく、一部が円筒 C の外部に漏れ
ていて、かつその電流の絶対値はイオン化された Nb や残留ガスによるものよりもはるかに大きい
ことを示している。さらに、放出電流の増加に伴いイオン電流 Iion が比例せずに指数関数的に増
1 タングステンもタンタルも最も融点が高い物質の一つであり、ニオブの融点程度以下の温度で運転するのには問題が
ない。
40
図 8.3: Nb の蒸着時間と膜厚計の周波数変化–改造バージョン
図 8.4: 放出電流 Ie とイオン電流 Iion との関係
41
加することは、熱電子の漏れが単なる統計的な原因によるものではなく、熱電子自身による空間電
荷効果によるものでもあることを示している。
次に、フィラメント電流を IF = 1.4A と一定にして、電圧 V を変化させたら図 14 のような結果
を得た。この結果から、まず自然に、V を大きくすれば、M に取り込まれる熱電子の割合が大き
図 8.5: 金属棒 M の電位 V とイオン電流 Iion の関係。黒い点と白い点は、前者の放出電流 Ie の
初期値が後者の 2 倍になるように IF を調整したものである。IF の変化に対する Ie の応答が非常
に大きいことから蒸着源を精確に制御するには、IF を固定して V を変化させるのがよいことがわ
かる。
くなると考察できる。V が大きく、Nb が十分量飛んでいるであろうと推定される領域での結果を
拡大して示したのが図 15 である。一部で、電流が正になっているが、これはイオン化された陽イ
オンの寄与が熱電子の漏れを上回ったことを意味する。
以上の結果から、まず Nb の蒸着レートを決めるのに、イオン化された Nb 陽イオンを測定する
のは、ほとんどの可能な操作条件で熱電子の漏れの測定誤差の範囲に入ってしまうため非現実的と
考えられる。また、かりに図 15 の領域で Iion の熱電子による寄与が陽イオンによる寄与に比べて
十分小さいと仮定しても、我々の用いた検電器の測定精度では、残留ガスの効果と Nb の効果を分
離するのは不可能である。
もう一つ得られた重要な結論としては、電子の空間電荷効果により、シミュレーションの結果が
大きな放出電流のもとではかなり疑わしくなることがあげられる。
42
図 8.6: V が大きな領域での金属棒 M の電位 V とイオン電流 Iion の関係。全ての点のシリーズは
Ie = 5mA である。結果が黒丸の点のシリーズとその他の点のシリーズで異なるのは、 3200V で
測定したとき蒸着源の回路の安定性が一時失われて特性が変化したためである。
43
第9章
Si(111) 表面上への Nb の蒸着
Si(111) 表面上に試作した電子ビーム蒸着源を用いて Nb を蒸着して構造の変化を観察すること
を試みた。Si と Nb は合金を作ることが知られている。また Si(111) 表面上に Nb を蒸着した研究
で,以下のようなことが知られている [10]。
• 常温では,蒸着された Nb は層成長をする。とくに,Si のバルク内部への拡散はほとんど起
こっていないと推定される。
• 300◦ C あたりでは,アイランドが出来るなど不均一に成長していることが推定される。写真
のような結果を得た。明らかに構造変化が見られ、Nb が電子ビーム蒸着源で蒸着可能であ
ることを示している。
• 600◦ C 以上では Si のバルク内部に Nb 原子が拡散していることが推定される。
観察結果
図 b ∼ 図 d は,蒸着レートが各段階でおよそ一定とすれば(∼ 5mono layers/sec),蒸着量と構
造の乱れ方が概ね比例していることを示しているように見える。この結果は,上記の層成長と矛盾
せず,蒸着源が期待通りの性能を見せていることを示している。
フラッシングは毎回同じ条件でで行っているが,フラッシングの回数を増やすに連れて,得られ
る 7 × 7 構造の RHEED パターンのぼけ方が大きくなっていると思われる。これは,Nb が Si バル
ク中に拡散して 7 × 7 構造を形成しにくくなっているためであると推定される。
アニールする前に図 i のように 7 × 7 構造のスポットがぼんやりと観察されるのに対して,ア
ニール後の図 j で 7 × 7 構造が完全に消えているのは Au などと同様に,Nb 原子がアニーリング
によって表面上を拡散するためと考えられる。
さらに,長時間アニールした後の図 k で再び 7 × 7 構造が現れつつあるのは,Nb がバルク内部
に拡散したのと,フラッシュされたのと両方の効果によるものと考えられる。
なお,フラッシングの温度では Nb と Si が反応して NbSi2 を生じている可能性もある。
44
第 III 部
まとめと展望
第 10 章 結論
本レポートは、2 つの全く独立したテーマからなるが、それぞれのテーマについて得られた成果
をまとめておきたい。
10.1
RHEED による Si(111) 面の観察
微斜面の 5 × 2 構造の観察では、非常に鮮明に 1 つの方位のドメインのみが優勢であることが確
認された。他の構造については、ほとんど原理的に微斜面が構造に与える物理的効果を考察するこ
とは難しいが、少なくとも、微斜面でも (111) 面と同様に構造を形成することは確認された(とく
に超構造が形成しにくいなどということはない)。
10.2
電子ビーム蒸着源
行った数々の実験から、試作した電子ビーム蒸着源が満足できる性能を持つことが確認された。
本実験では、膜厚計の状態が安定していなかったため、そのデータは全面的に信頼できるとは言え
ないが、その結果を参照すると、パワーによって蒸着レートを制御することが可能であることが推
定される。さらに SIMION でいろいろな場合について電子ビーム蒸着源の電子ビームの軌跡をシ
ミュレーションしてみたので、多少なりとも一般的な蒸着源設計の目安(失敗例も含めて)を提供
できたであろう。特に、フィラメントに正の電位を与えることが、電子ビームを収束させるのに非
常に大きな影響を与えることは、注目に値すると考える。実際、これはフィラメント周囲の電場を
十分に大きくしてやれば熱電子の初期運動量が無視できることを示唆している。
46
第 11 章 課題と展望
本研究の当初の目標は、作製した電子ビーム蒸着源を用いてニオブを Au(111) 表面上もしくは
Mn 薄膜上へ蒸着して、STP で観察したり、極低温 STM で超伝導状態を調べたりすることであっ
た(東大物理学研究科長谷川研には液体 He で極低温にまで冷却しながら観察できるチャンバーが
ある。)。しかし、電子ビーム蒸着源の作製と膜厚計による実験に予想したより長い時間がかかり、
かつ STM が一時破損していたことが原因で、期間内に当初の目標を達成することはできなかった。
したがって、これからの課題としては、蒸着源を用いて上記のような実験を行うことが考えられる。
蒸着源の性能評価の実験では Au(111) 面上へ Nb を蒸着することを試みたが、RHEED パター
ンに変化は見られなかった(図)。この原因は、Au(111)-Nb 表面が周期構造を生じないためとも
考えられる。このため、蒸着実験のデータは Si(111) 表面上でとった。
√
√
RHEED パターンの考察に関していうと、 3 × 3 構造の回折スポットの形状について考察を
加えなかったのは、私が気付かなかったためであるが本来は必要であっただろう。このテーマおよ
び 5 × 2 構造のさらなる考察は有力なテーマとなりつづけるであろう。
47
付 録A
A.1
Au(111) 表面の STM による観察
STM
試料表面にきわめてするどくとがらせた金属探針をおき、これを表面から 10Å ∼ 100Å 程度の
距離まで近づけ、表面と探針の間にバイアス電圧をかけると、トンネル効果によって電子が飛び移
り電流が流れる。この時、適当に設定された条件のもとで、探針で表面上をスキャンして、流れ
るトンネル電流を測定することにより、表面の電子状態を観察するのが STM(Scanning Tunneling
Microscope) である。STM は表面の原子配列の姿を直接に観察することを可能にした優れた実験
法であり,大気中や溶液中でも測定可能であり,ミクロ領域での動的現象や,電子スペクトルの情
報が得られるなど,今後の技術的発展が大きく期待される [4]。我々の実験装置には、次の 2 つの
測定モードがある。
Constant height mode 探針の高さを表面から一定にしてスキャニングを行い、トンネル電流
の変化をもとに、表面電子状態を測定する。
Constant current mode 探針に流れるトンネル電流が一定になるように探針の高さを制御しな
がらスキャンして、探針の高さから表面電子状態を測定する。
それぞれにメリットがある。前者は後者に比べてスキャンスピードが速く、試料を大域的に観察す
るのに適している。例えば、表面が滑らかであるかどうかを調べたり、観測したいドメインを探し
たりするのに向いている。表面が滑らかであることが明らかでない場合は、比較的高い位置に探
針をおいて測定を行うことが、探針が表面に衝突して破損したりするのを防ぐ意味でも重要であ
る1 探針の高さを十分高くすることによって、スキャンスピードを上げることができるのである。ス
キャンスピードは、 in situ 観察において特に重要である。一方、後者は前者に比べて探針を表面
に近づけることが可能であるため、より解像度の高いデータが得られ、局所的観察に適している。
A.2
Au(111) 面の観察
本実験の当初の目標であった Au(111) 面上の観察の基礎データをとることが目的で、Au(111) 清
浄表面の STM による観察を行った。結果を図に示す。
1 STM の針の先端は ∼ 10nm 程度に細いから、壊れやすく、かつ良い針の状態を実現するのは必ずしも簡単ではない。
先端を細く加工する方法としては、化学研磨と、単に切断して針の先端付近にとがった場所が出現することを期待する 2
通りの方法がある。
48
謝辞
このレポートは、RHEED の使用の練習及び Si(111) 表面上に金属を蒸着してできる超構造の考
察と、電子ビーム蒸着源 (Electron Beam Evaporant) の作製という 2 つのテーマからなるが、い
ずれも東大物理学研究科助手の長尾さんに細部に渡って指導していただいた。学部生実験の性質
上、研究テーマその他を決定していただき、かつ基本的な技術などを教えていただくのは必要であ
ろう。しかし、本研究は細部にわたって長尾さんに手伝っていただき、かつ多くの重要な場面にお
いて initiative をとっていただいた。
長尾さんには終始懇切丁寧に指導していただき、最大限の感謝の意を表したい。
49
関連図書
[1] 井野正三, 高見知秀:表面物性, 東大物理学教室 「物理学実験 2」解説書 (1995).
[2] 若林健之, 安永卓生:画像処理, 東大物理学教室 「物理学実験 2」解説書 (1995).
[3] 中村勝吾:表面の物理, 薄膜・表面シリーズ 2, 共立出版 (1988).
[4] 塚田捷:表面物理入門, 東京大学出版会 (1996).
[5] 垣谷公徳・矢城陽一郎・吉森昭夫:表面科学 17 (1996) 688.
[6] T. Hasegawa, S. Hosaka and S. Hosoki, Jpn. J. Appl. Phys. 31 (1992) 1492.
[7] T. Hasegawa, K. Takata, S. Hosaka and S. Hosoki, J. Vac. Sci. Technol. 8 (1990) 241
[8] A. A. Baski, J. Nogami and C. F. Quate, Phys. Rev. B 41 (1990) 247.
[9] H. Daimon et al., Surf. Sci. 35 (1990) 154.
[10] S. R. Mahamuni, D. T. Abell and E. D. Williams, Solid State Communications, 68 (1988)
145.
[11] 谷川修司, 長尾忠昭:真空技術, 東大物理学教室 「物理学実験 1」解説書 (1995) 第 2 章.
[12] 山勝矢:新版技術読本, オーム社 (1994).
50
© Copyright 2026 Paperzz