100V/200V 電源用
AC サーボドライバ(CC-Link 対応)
H A - 8 0 0 C シリーズ 技術資料
(SHA, FHA-Cmini, FHA-C, RSF/RKFシリーズ対応)
ISO14001
(穂高工場)
本技術資料は、以下のソフトウェアバージョンに対応しています。
Ver 3.x
ISO9001
はじめに
はじめに
このたびは、100V/200V 電源用 AC サーボドライバ HA-800C シリーズをご採用いただき誠にありがと
うございます。
本製品の取り扱いや使用方法を誤りますと、思わぬ事故を起こし、さらに製品の寿命を短くすること
があります。長期にわたり安全にご使用いただくために、本書をよくお読みの上、正しくご使用くだ
さい。
本書に記載されている内容は、予告なく変更することがありますので、ご了承ください。
本書は大切に保管してください。
本書は必ず最終ユーザー様へお渡しください。
安全にお使いいただくために
安全にお使いいただくために
本ドライバを安全に正しくお使いいただくために、ご使用前に必ず「安全にお使いいただくために」
と本文を熟読し、内容を十分理解してから使用してください。
表示の説明
ここに示した注意事項は、安全に関する重大な内容を記載しています。必ずお守りください。
取り扱いを誤った場合、死亡または重傷を負う可能性が想定される内容を示
しています。
警
告
取り扱いを誤った場合、傷害を負う可能性が想定される内容および物的損害
の発生が予想される内容を示しています。
注
意
製品が動作不能、誤動作、または性能、機能への悪影響を予防するために、
実施または回避すべきことを示しています。
用途の限定
本製品は、次の用途へのご使用には考慮されていません。
・宇宙用機器
・航空機用機器
・真空用機器
・自動車用機器
・人の輸送を目的とする機器
・原子力用機器
・遊戯用機器
・特殊環境用機器
・家庭内で使用する機器、機具
・人体に直接作用する機器
このような用途でお使いになる場合は、あらかじめ弊社にご相談ください。
注
意
本製品を、人命にかかわるような設備及び重大な損失の発生が予
測される設備への適用に際しては、破壊によって出力が制御不能
になっても、事故にならないよう安全装置を設置してください。
1
安全にお使いいただくために
安全上のご注意
アクチュエータをご使用の際に注意していただきたいこと
設計上の注意
決められた環境でご使用ください。
注
意
アクチュエータは屋内使用を対象としています、次の条件を守ってください。
・ 周囲温度:0~40℃
・ 周囲湿度:20~80%RH(結露しないこと)
・ 振動:24.5m/s2 以下
・ 水、油がかからないこと
・ 腐食性、爆発性ガスのないこと
取り付けは決められた方法で行ってください。
・ アクチュエータ軸と相手機械の心出しを技術資料に基づいて正確に行って
ください。
・ 心ずれがあると振動や出力軸の破壊につながります。
ご使用上の注意
コンセントに直接接続しないでください。
警 告
・ アクチュエータは専用のドライバに接続しないと運転できません。
・ 直接商用電源をつなぐことは絶対に避けてください。アクチュエータが壊
れ、火災になることがあります。
アクチュエータをたたかないでください。
・ アクチュエータはエンコーダが直結されていますので木づちなどでたたか
ないでください。
・ エンコーダが破壊するとアクチュエータが暴走することがあります。
リード線は引っ張らないでください。
・ リード線を強く引っ張ると接続部が損傷し、アクチュエータが暴走するこ
とがあります。
許容トルクを越えないでください。
注
2
意
・ 最大トルク以上のトルクが加わらないようにしてください。
・ 出力軸にアームなどが直接付く場合、アームをぶつけると出力軸が制御不
能になることがあります。
安全にお使いいただくために
ドライバをご使用の際に注意していただきたいこと
設計上の注意
決められた環境でご使用ください。
注
意
ドライバは熱を発生します。放熱に十分注意して、次の条件でご使用ください
・ 取り付け方向は垂直にし、十分空間を設ける
・ 0~50℃、95%RH 以下(結露のないこと)
・ 振動、衝撃のないこと
・ チリ、ほこり、腐食性、爆発性ガスのないこと
ノイズ処理、接地処理を確実に行ってください。
信号線にノイズが乗ると振動や動作不良が起こります。次の条件をお守りくだ
さい。
・ 強電線と弱電線は分離してください。
・ 配線は極力短くしてください。
・ アクチュエータ、ドライバの設置は 1 点接地で第 3 種接地以上としてくだ
さい。
・ モータ回路に電源入力用フィルタを使用しないでください。
負荷側から回す運転には十分ご注意ください。
・ アクチュエータが負荷側から回されながら運転を行うとドライバが壊れる
おそれがあります。
・ このような使用にあたっては弊社にご相談ください。
漏電ブレーカはインバータ用を使用してください。
漏電ブレーカを使用する場合はインバータ用を使用してください。時延形の使
用はできません。
本製品を、人命にかかわるような設備および重大な損失の発生が
予測される設備への適用に際しては、破壊によって出力が制御不
能になっても、事故にならないよう安全装置を設置してくださ
い。
ご使用上の注意
通電中は配線変更をしないでください。
警
告
配線の取り外し、コネクタの抜き差しは必ず電源を切ってから行ってくださ
い。感電や暴走の危険があります。
電源オフ後 15 分間は、端子部に触れないでください。
・ 電源を切っても内部に電気がたまっています。感電防止のため、点検作業
は電源オフ後、15 分以上経過後、CHARGE ランプの消灯を確認してから実
施してください。
・ 設置にあたっては、内部の電気部品に簡単にさわれない構造としてくださ
い。
3
安全にお使いいただくために
耐電圧試験は行わないでください。
注
意
・ メガーテストおよび耐圧試験は行わないでください。ドライバの制御回路
を破壊します。
・ このような使用にあたっては弊社にご相談ください。
電源のオン/オフでの運転はできません。
・ 電源のオン/オフを頻繁に行うと内部回路素子の劣化を招きます。
・ アクチュエータの運転/停止は、指令信号で行ってください。
廃棄について
産集廃棄物として処理してください。
注
4
意
ドライバには、ケースおよび筐体に材質表示がしてありますので分別して廃棄
を願います。
本書の構成
本書の構成
第1章
機能と構成
第2章
設置・配線
第3章
立ち上げ
第4章
エンコーダシステム
第5章
入出力信号
第6章
パネル表示と操作
状態表示モード・
アラームモード・
調整モード
状態表示モード・アラームモードの表示内容の説明。調整モードで行う、
第7章
第8章
システムパラメータモー
ド
入出力信号の割付や論理設定法、および機能拡張として、電子ギヤ等設
第9章
テストモード
第 10 章
通信ソフトウェア
(PSF-800)
ドライバの型式、仕様、外形寸法等の概要を説明します。
物品の確認、環境、電源配線、ノイズ処理およびコネクタ配線に関る内
容を説明します。
はじめてドライバをご使用されるに当たり、物品の確認から実装置の運
転までの立ち上げ手順を説明します。
アクチュエータの機種によりエンコーダ構成が異なります。各アクチュ
エータの詳細を説明します。
入出力信号の信号条件、信号の機能詳細を説明します。
ドライバの前面パネルの表示部と操作ボタンの操作法、各モードの操作
概要を説明します。
サーボループゲイン、各種判定基準値や速度制御時の加減速時間設定の
操作や詳細内容を説明します。
定の詳細を説明します。
ジョグによるオートチューニングや入出力信号のモニタや出力信号の
擬似操作による装置の動作確認法等の詳細を説明します。
パソコン用専用ソフトを用いることによる入出力信号の状態、回転速度
等のサーボ状態、オートチューニング、パラメータの設定、入出力信号
の割付、サーボ動作波形モニタ等の操作法を説明します。
ドライバのアラーム発生状況、ワーニング(警告)発生状態の内容詳細
第 11 章
トラブルシューティング
第 12 章
別売品
必要に応じて、ご購入いただく別売品について説明します。
第 13 章
CC-Link 通信機能
CC-Link の仕様・配線方法・設定方法について説明します。
付録
を説明します。
出荷時に設定のパラメータ一覧および、回生抵抗について説明します。
5
目次
目次
安全にお使いいただくために ................................................................................. 1
表示の説明 ............................................................................................................... 1
用途の限定 ............................................................................................................... 1
安全上のご注意 ........................................................................................................ 2
本書の構成
................................................................................................... 5
目次
................................................................................................... 6
関連技術資料
................................................................................................. 14
アクチュエータ・ドライバ関連規格について ........................................................................ 15
適合規格 ................................................................................................................. 16
欧州 EC 指令への適合............................................................................................ 17
第1章
機能と構成
1-1 ドライバの概要 ............................................................................................ 1-1
機能の概要 ............................................................................................................ 1-1
1-2
機能ブロック図 .......................................................................................... 1-2
1-3
機器構成図 ................................................................................................ 1-3
1-4
ドライバの型式 .......................................................................................... 1-5
ドライバの型式 ..................................................................................................... 1-5
別売品 ................................................................................................................... 1-5
1-5
アクチュエータ、中継ケーブルの組み合わせ.......................................................... 1-6
1-6
ドライバの定格と仕様 ............................................................................... 1-7
1-7
機能一覧
.............................................................................................. 1-10
1-8
外形寸法
.............................................................................................. 1-11
1-9
表示パネル各部の名称と機能 .................................................................. 1-13
第2章
設置・配線
2-1 品物の確認
................................................................................................ 2-1
確認の手順 ............................................................................................................ 2-1
2-2
設置場所と設置工事................................................................................... 2-2
設置環境 ................................................................................................................ 2-2
設置にあたっての注意事項 ................................................................................... 2-2
取り付け手順......................................................................................................... 2-3
2-3
電源の接続 ................................................................................................ 2-5
ケーブルの許容サイズ .......................................................................................... 2-5
6
目次
電源の接続 ............................................................................................................ 2-6
電源ラインの保護 ................................................................................................. 2-8
接地線の接続......................................................................................................... 2-8
電源投入・遮断シーケンス ................................................................................... 2-9
2-4
ノイズ対策 .............................................................................................. 2-14
接地処理 .............................................................................................................. 2-14
ノイズフィルタの設置 ........................................................................................ 2-15
2-5
ドライバ・モータ間の配線 ...................................................................... 2-17
モータとの接続 ................................................................................................... 2-17
エンコーダとの接続 ............................................................................................ 2-18
2-6
上位機器との配線 .................................................................................... 2-19
上位機器との接続(入出力信号) ...................................................................... 2-19
CC-Link コネクタの接続 ..................................................................................... 2-20
パソコンとの接続(PSF-800) .......................................................................... 2-21
第3章
3-1
立ち上げ
立ち上げ手順 ............................................................................................. 3-1
立ち上げ手順......................................................................................................... 3-1
3-2
初めて電源を投入する ............................................................................... 3-2
制御電源の投入時の詳細....................................................................................... 3-3
電源の投入時のトラブルシューティング ............................................................. 3-7
3-3
アクチュエータ単体で動作確認 ................................................................. 3-8
動作確認時のトラブルシューティング ................................................................. 3-9
3-4
実装置での運転確認................................................................................. 3-12
実運転確認時のトラブルシューティング ........................................................... 3-13
3-5
手動によるゲインの調整方法 .................................................................. 3-14
位置制御の場合 ................................................................................................... 3-14
速度制御の場合 ................................................................................................... 3-15
サーボゲインの応用調整機能 ............................................................................. 3-17
3-6
本運転にあたって .................................................................................... 3-21
本運転時の注意事項 ............................................................................................ 3-21
日常の保守点検 ................................................................................................... 3-21
定期交換部品について ........................................................................................ 3-22
バックアップ用バッテリについて ...................................................................... 3-22
バックアップバッテリの交換方法 ...................................................................... 3-23
第4章
エンコーダシステム
4-1
エンコーダの概要 ...................................................................................... 4-1
4-2
17bit アブソリュートエンコーダ ............................................................... 4-4
特長 ....................................................................................................................... 4-4
立ち上げ ................................................................................................................ 4-6
原点セット ............................................................................................................ 4-8
7
目次
デ-タ出力 ............................................................................................................ 4-9
エラー・ワーニング対処方法 ............................................................................. 4-11
4-3
13bit アブソリュートエンコーダ ............................................................. 4-13
特長 ..................................................................................................................... 4-13
立ち上げ .............................................................................................................. 4-15
原点セット .......................................................................................................... 4-16
デ-タ出力 .......................................................................................................... 4-17
エラー・ワーニング対処方法 ............................................................................. 4-21
4-4
インクリメンタルエンコーダ .................................................................. 4-23
立ち上げ .............................................................................................................. 4-25
原点セット .......................................................................................................... 4-26
デ-タ出力 .......................................................................................................... 4-27
エラー対処方法 ................................................................................................... 4-28
第5章
5-1
入出力信号
入出力信号一覧 .......................................................................................... 5-1
入出力信号のピン番号と名称 ............................................................................... 5-1
入出力信号コネクタ CN2 の型式 .......................................................................... 5-1
入出力信号接続回路 .............................................................................................. 5-2
5-2
入力信号詳細 ............................................................................................. 5-5
CN2-1
CN2-2
CN2-3
CN2-4
CN2-5
5-3
入力信号コモン:IN-COM ...................................................................... 5-5
非常停止:E-STOP ................................................................................. 5-5
アラームクリア:ALM-CLR.................................................................... 5-5
偏差クリア:ERR-CLR........................................................................... 5-5
原点信号:ORG ...................................................................................... 5-6
出力信号詳細 ............................................................................................. 5-7
CN2-8 運転準備完了:READY........................................................................... 5-7
CN2-9 アラーム:ALARM .................................................................................. 5-7
CN2-10 原点復帰(認識)完了:ORG-END...................................................... 5-7
CN2-11 Z 相出力(OC):Z ................................................................................... 5-7
CN2-7/12 出力信号コモン:OUT-COM (出力信号)............................................ 5-7
CN2-14~19 エンコーダ信号出力(A,B,Z) ....................................................... 5-8
CN2-20 接地:FG .............................................................................................. 5-8
5-4
モニタ出力 ................................................................................................ 5-9
CN9-1:速度モニタ(SPD-MON) ...................................................................... 5-9
CN9-2:電流モニタ(CUR-MON)...................................................................... 5-9
CN9-3:信号モニタ(SIG-MON) ..................................................................... 5-10
CN9-4:モニタグランド(GND) ...................................................................... 5-10
5-5
デフォルト(工場出荷時)の接続例 ............................................................ 5-11
4 本省線インクリメンタル仕様(FHA-C シリーズ)の場合 ................................... 5-11
13bit アブソリュート仕様(FHA-C シリーズ)の場合............................................ 5-12
17bit アブソリュートエンコーダ仕様(SHA シリーズ)の場合 ............................. 5-13
8
目次
第6章
6-1
パネル表示と操作
表示パネル部の操作................................................................................... 6-1
モードの概要......................................................................................................... 6-1
ドライバ起動時のパネル表示 ............................................................................... 6-2
パネル表示の階層 ................................................................................................. 6-3
状態表示モードの操作概要 ................................................................................... 6-4
アラームモードの操作概要 ................................................................................... 6-5
調整モードの操作概要 .......................................................................................... 6-6
システムパラメータモードの操作概要 ................................................................. 6-8
テストモードの操作概要..................................................................................... 6-10
第7章
7-1
状態表示モード・アラームモード・調整モード
状態表示モード .......................................................................................... 7-1
状態表示モード一覧 .............................................................................................. 7-1
7-2
状態表示モード詳細................................................................................... 7-3
d01、02:偏差パルス数表示 ................................................................................ 7-3
d04:過負荷率表示 ............................................................................................... 7-4
d05、06:帰還パルス数表示 ................................................................................ 7-5
d07、08:指令パルス数表示 ................................................................................ 7-5
d13:適用アクチュエータコード ......................................................................... 7-6
d16:回生電力(HA-800-24 のみ) ..................................................................... 7-7
7-3
アラームモード .......................................................................................... 7-8
アラーム表示内容 ................................................................................................. 7-8
7-4
アラーム内容一覧 ...................................................................................... 7-9
AL:発生アラームワーニング表示 ....................................................................... 7-9
AHcLr:アラーム履歴クリア .............................................................................. 7-10
7-5
調整モード .............................................................................................. 7-11
7-6
調整モード詳細 ........................................................................................ 7-12
AJ00:位置ループゲイン.................................................................................... 7-12
AJ01:速度ループゲイン.................................................................................... 7-12
AJ02:速度ループ積分補償 ................................................................................ 7-13
AJ03:フィードフォワードゲイン ..................................................................... 7-13
AJ04:位置決め完了範囲.................................................................................... 7-13
AJ05:速度到達判定値 ....................................................................................... 7-14
AJ06:トルク到達判定値.................................................................................... 7-14
AJ07:零速度判定値 ........................................................................................... 7-14
AJ11:トルク制限値 ........................................................................................... 7-14
AJ12:加減速時定数 ........................................................................................... 7-15
AJ16:速度モニタオフセット ............................................................................ 7-15
AJ17:電流モニタオフセット ............................................................................ 7-16
AJ20:フィードフォワードフィルタ.................................................................. 7-16
AJ21:負荷慣性モーメント比 ............................................................................ 7-16
AJ22:トルク定数補正係数 ................................................................................ 7-17
9
目次
AJ23:ばね定数補正係数.................................................................................... 7-17
AJ24:位置決め時自動ゲイン ............................................................................ 7-17
第8章
8-1
システムパラメータモード
システムパラメータモード ........................................................................ 8-1
SP40:CN9-3 出力信号設定 ................................................................................. 8-2
SP44~45:電子ギヤ設定..................................................................................... 8-2
SP48:サーボ ON 時偏差クリア設定 ................................................................... 8-3
SP49:許容位置偏差 ............................................................................................ 8-3
SP50:指令極性 ................................................................................................... 8-3
SP51:速度入力係数設定 ..................................................................................... 8-4
SP53:トルク入力係数設定 ................................................................................. 8-5
SP54:状態表示設定 ............................................................................................ 8-5
SP55:DB 有効/無効設定 ................................................................................... 8-5
SP59:角度補正有効/無効設定 .......................................................................... 8-5
SP60:位置決め時自動ゲイン有効/無効設定..................................................... 8-6
SP61:エンコーダモニタ出力パルス数 ............................................................... 8-6
SP62:入力信号論理設定 ..................................................................................... 8-6
SP63:出力信号論理設定 ..................................................................................... 8-7
SP64:回生抵抗選択(HA-800-24 のみ) ........................................................... 8-7
SP65:正転/逆転禁止時動作 .............................................................................. 8-7
SP66:アブソリュートエンコーダ機能設定 ........................................................ 8-8
SP67:出力軸分割機能設定 ................................................................................. 8-8
SP68:電子ギヤ機能設定 ................................................................................... 8-10
SP69:フィードフォワード制御機能設定 .......................................................... 8-11
第9章
テストモード
9-1
テストモード ............................................................................................. 9-1
9-2
テストモード詳細 ...................................................................................... 9-2
T00:入出力信号モニタ........................................................................................ 9-2
T01:出力信号操作 ............................................................................................... 9-3
T02:JOG 速度設定 .............................................................................................. 9-4
T03:JOG 加減速時定数設定 ............................................................................... 9-5
T04:JOG 動作 ..................................................................................................... 9-6
T05:パラメータ初期化........................................................................................ 9-8
T08:多回転クリア ............................................................................................... 9-9
T09:オートチューニング .................................................................................. 9-10
T10:オートチューニング移動量 ....................................................................... 9-12
T11:オートチューニングレベル選択 ................................................................ 9-13
第 10 章
通信ソフトウェア
10-1 概要
.............................................................................................. 10-1
セットアップ....................................................................................................... 10-1
起動画面 .............................................................................................................. 10-4
状態表示 .............................................................................................................. 10-7
10
目次
10-2 オートチューニング................................................................................. 10-8
10-3 パラメータ設定 ...................................................................................... 10-10
10-3-1.ドライバ内部パラメータの編集・初期化 ........................................... 10-10
10-4 設定値の保存・比較・コピー ................................................................ 10-12
10-4-1.設定値の保存....................................................................................... 10-12
10-4-2.保存済みの設定値ファイルの読出し................................................... 10-14
10-4-3.保存済み設定ファイルとドライバ内部の設定値の比較 ...................... 10-15
10-4-4.保存済み設定ファイルをドライバへ書き込む .................................... 10-17
10-5 テスト運転 ............................................................................................ 10-19
10-6 出力信号操作 ......................................................................................... 10-21
10-7 IO モニタ
............................................................................................ 10-22
10-8 波形モニタ ............................................................................................ 10-23
10-9 アラーム
............................................................................................ 10-25
10-10 ポイントテーブル編集・動作 ............................................................... 10-26
10-10-1.PSF-800 ポイントテーブル編集・動作 ............................................... 10-26
10-10-2.PSF-800 でのポイントテーブル編集 .................................................. 10-27
10-10-3.単位設定 .............................................................................................. 10-29
10-10-4.サーボから読み込み ............................................................................ 10-31
10-10-5.サーボに書き込む ................................................................................ 10-31
10-10-6.ファイル読み込み ................................................................................ 10-32
10-10-7.ポイントテーブルの保存とドライバへの書き込み .............................. 10-33
10-10-8.ポイントテーブル動作 ......................................................................... 10-34
第 11 章
トラブルシューティング
11-1 アラームとその処置................................................................................. 11-1
アラーム一覧....................................................................................................... 11-1
アラーム対処方法 ............................................................................................... 11-2
11-2 ワーニングとその処置 ........................................................................... 11-13
ワーニング一覧 ................................................................................................. 11-13
ワーニング対処方法 .......................................................................................... 11-14
第 12 章
別売品
12-1 別売品
.............................................................................................. 12-1
中継ケーブル....................................................................................................... 12-1
専用通信ケーブル ............................................................................................... 12-2
接続用コネクタ ................................................................................................... 12-2
サーボパラメータ設定ソフトウェア(PSF-800) ............................................. 12-3
動作データ設定ソフトウェア(PSF-680CL) ................................................... 12-3
バックアップ用バッテリ..................................................................................... 12-4
モニタ用ケーブル ............................................................................................... 12-4
11
目次
第 13 章
CC-Link 通信機能
13-1 仕様
.............................................................................................. 13-1
通信仕様 .............................................................................................................. 13-1
システム構成....................................................................................................... 13-2
通信状態モニタ LED ........................................................................................... 13-3
HA-800C CC-Link 基本仕様 ................................................................................ 13-4
ポイントテーブルデータ設定範囲 ...................................................................... 13-5
移動量モード設定 ............................................................................................... 13-6
原点復帰動作について ........................................................................................ 13-9
ネットワークパラメータ一覧 ........................................................................... 13-11
NP00:アクチュエータ分解能.......................................................................... 13-11
NP02:原点復帰速度 1 ..................................................................................... 13-12
NP04:原点復帰速度 2 ..................................................................................... 13-12
NP05:原点復帰加減速時間 ............................................................................. 13-12
NP06:原点復帰方向 ........................................................................................ 13-12
NP18:原点復帰方法 ........................................................................................ 13-12
NP19:原点センサ選択 .................................................................................... 13-12
NP07:仮想原点 ............................................................................................... 13-13
NP08:RXn1 最小 OFF 時間 ............................................................................ 13-13
NP09:バックラッシュ補正 ............................................................................. 13-13
NP17:近回り有効/無効 ................................................................................... 13-14
13-2 配線方法
............................................................................................ 13-15
終端抵抗について ............................................................................................. 13-15
CC-Link コネクタの配線方法 ............................................................................ 13-16
13-3 設定方法
............................................................................................ 13-17
局番のつけ方..................................................................................................... 13-17
最大接続台数について ...................................................................................... 13-18
13-4 通信プロファイル .................................................................................. 13-19
入出力信号(入出力ディバイス)RX・RY、RWw・RWr ................................... 13-19
入出力信号の詳細 RX・RY、RWw・RWr ............................................................ 13-21
データの読み取り、書込み詳細 RWw・RWr .................................................... 13-26
モニタコード..................................................................................................... 13-29
命令コード ........................................................................................................ 13-30
書込み命令コード(RWwn+2)詳細 ................................................................ 13-35
タイミングチャート .......................................................................................... 13-42
付録
付録-1 出荷時設定 ............................................................................................ 付-1
付録-2 回生抵抗について .................................................................................. 付-7
ドライバ内蔵回生抵抗器と回生電力................................................................... 付-7
外付け回生抵抗器 ............................................................................................. 付-10
許容負荷イナーシャ .......................................................................................... 付-12
付録-3 ドライバ保持データ一覧 ..................................................................... 付-18
12
目次
付録-4 ドライバ交換手順 ................................................................................ 付-22
付録-5 アクチュエータ・モータ交換手順 ....................................................... 付-27
付録-6 SHA-CG(-S)使用時の注意事項 ............................................................. 付-30
モニタ数値例..................................................................................................... 付-34
付録-7 制御ブロック図.................................................................................... 付-36
13
関連技術資料
関連技術資料
関連する技術資料については、下表に示すものがあります。必要に応じてご確認ください。
資料名称
AC サーボアクチュエータ
SHA シリーズ技術資料
14
内容
SHA20A から SHA65A の仕様、特性を説明しています。
AC サーボアクチュエータ
FHA-C シリーズ技術資料
FHA-17C から FHA-40C の仕様、特性を説明しています。
AC サーボアクチュエータ
FHA-Cmini シリーズ技術資料
FHA-8C から FHA-14C の仕様、特性を説明しています。
AC サーボアクチュエータ
RSF/RKF シリーズ技術資料
RSF-17 から RSF-32,RKF-20 から RKF-32 の仕様、特性を説明しています。
アクチュエータ・ドライバ関連規格について
アクチュエータ・ドライバ関連規格について
機能
定 格 電 流
(A)
最 大 電 流
(A)
海外規格
適用アクチュエータ
電圧
UL・cUL
CE
HA-800*-1
HA-800*-3
HA-800*-6
HA-800*-24
1.5
3
6
24
4.0
9.5
19
55
汎用 I/O
HA-800A
メカトロリン
ク
HA-800B
CC-Link
HA-800C
UL・cUL
○
CE
○
TUV
○
エンコーダ
タイプ
FHA-8C-xx-E200
200
○
-1C-200
FHA-11C-xx-E200
200
○
-1C-200
FHA-14C-xx-E200
200
○
FHA-17C-xx-E250
200
○
○
FHA-25C-xx-E250
200
○
○
FHA-32C-xx-E250
200
○
○
FHA-40C-xx-E250
200
○
○
FHA-8C-xx-12S17b
200
FHA-11C-xx-12S17b
200
FHA-14C-xx-12S17b
200
FHA-17C-xx-S248
200
○
○
FHA-25C-xx-S248
200
○
○
FHA-32C-xx-S248
200
○
○
FHA-40C-xx-S248
200
○
○
FHA-8C-xx-E200
100
○
-1C-100
FHA-11C-xx-E200
100
○
-1C-100
FHA-14C-xx-E200
100
FHA-17C-xx-E250
100
○
○
FHA-25C-xx-E250
100
○
○
FHA-32C-xx-E250
100
○
○
FHA-8C-xx-12S17b
100
FHA-11C-xx-12S17b
100
省線インク
リメンタル
100
FHA-17C-xx-S248
100
○
○
FHA-25C-xx-S248
100
○
○
FHA-32C-xx-S248
100
○
○
-3C-200
-6C-200
-1D/E-200
-1D/E-200
-1D/E-200
-3A-200
-3A-200
13bit ア ブ
ソリュート
-6A-200
-6A-200
省線インク
リメンタル
-1C-100
-3C-100
-6C-100
-6C-100
17bit ア ブ
ソリュート
FHA-14C-xx-12S17b
-3C-200
-6C-200
17bit ア ブ
ソリュート
○
-1C-200
13bit ア ブ
ソリュート
-1D/E-100
-1D/E-100
-1D/E-100
-3A-100
-6A-100
-6A-100
15
アクチュエータ・ドライバ関連規格について
HA-800*-1
HA-800*-3
HA-800*-6
HA-800*-24
定格電流(A)
1.5
3
6
24
最大電流(A)
4.0
9.5
19
55
機能
海外規格
電圧
UL・
cUL
CE
SHA20Axxxx-C08x200-xxS17bA
200
○
○
SHA25Axxxx-B09x200-xxS17bA
200
○
○
SHA32Axxxx-B12x200-xxS17bA
200
○
○
SHA40Axxxx-B15x200-xxS17bA
200
○
○
SHA58Axxxx-A21x200-xxS17bA
200
○
○
SHA65Axxxx-A21x200-xxS17bA
200
○
○
SHA25Axxxx-B09x100-xxS17bA
100
○
○
適用アクチュエータ
汎用 I/O
HA-800A
メカトロリンク
HA-800B
CC-Link
HA-800C
UL・cUL
○
CE
○
TUV
○
エンコーダ
タイプ
-3D/E
-200
-3D/E
-200
17bit アブソ
リュート
-6D/E
-200
-6D/E
-200
-6D/E
-100
-24D/E
-200
-24D/E
-200
-24D/E
-200
適合規格
Motor & Actuator
UL 1004-1 (Rotating Electrical Machines - General Requirements)
UL 840 (Insulation Coordination Including Clearances and Creepage Distances for Electrical
Equipment)
CSA-C22.2 No. 100 (Motors and Generators) , CSA-C22.2 No. 0.2 (Insulation Coordination)
(UL File No. E243316)
EN60034-1 (Low Voltage Directive)
※Motor、Actuator の適合規格は機種によって異なります。詳細は個別カタログを参照してください。
Driver
<HA-800C-1*, HA-800C-3*, HA-800C-6*, HA-800C-24*>
UL 508C (Power Conversion Equipment)
CSA-C22.2 No.14 (Industrial Control Equipment)
(UL File No. E229163)
EN61800-5-1 (Low Voltage Directive)
EN61800-3 (EMC Directive)
16
アクチュエータ・ドライバ関連規格について
欧州EC指令への適合
HA-800 シリーズドライバは、お客様装置の CE マーキングを容易にするため、CE マーキングに関す
る低電圧指令と EMC 指令の適合性確認試験を第三者認証機関にて実施しています。
EMC指令への適合に関する注意
当社の AC サーボシステムは、AC サーボドライバと AC サーボアクチュエータ・モータを制御
盤に組み込んだモデルを製作し、そのモデルにより、EMC 指令の関連規格に適合させています。
実際のご使用にあたっては、使用条件・ケーブル長さ等の配線関係の条件がモデルとは異なって
きます。
このようなことから、EMC 指令については AC サーボドライバ及び AC サーボアクチュエータ
を組み込んだ最終装置又は、機器での適合が必要です。
当社としては、お客様が本製品を組み込んで使用する際に、EMC 指令適合に有利となるよう、
モデルで使用したノイズフィルタ等の周辺機器を紹介します。
EMC 指令の関連規格
モータ・ドライバ
EN55011: 2009/A1:2010(Group 1 Class A)
EN61800-3: 2004/A1:2012(Category C2, 2nd environment)
IEC61000-4-2 :静電気放電イミュニティ
IEC61000-4-3 :放射電磁界イミュニティ
IEC61000-4-4 :高速過渡現象/バーストイミュニティ
IEC61000-4-5 :サージイミュニティ
IEC61000-4-6 :無線周波伝導イミュニティ
IEC61000-2-1 :電圧ディップ・変動イミュニティ
IEC61000-2-4 :低周波伝導妨害
IEC60146-1-1 Class B
周辺機器構成
設置環境(条件):本製品をお安全にご使用いただくため、次の設置環境を守ってください。
1)過電圧カテゴリー:Ⅲ
2)汚染度:2
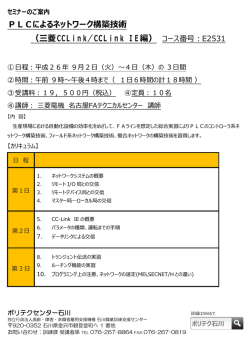
モデル構成図
制御盤
ノイズ
フィルタ
配線用
遮断機
HA-800 シリーズ
ドライバ
1)
2)
アクチュエータ、
モータ
サージプ
ロテクタ
3)
上位コントローラ
DC24V
電源
:トロイダルコア
:フェライトコア
:金属クランプ
1)エンコーダケーブル 2)モータケーブル(モータ動力および保持ブレーキ)
3)インターフェースケーブル
17
アクチュエータ・ドライバ関連規格について
(1)入力電源
200V 入力タイプ
主回路電源:三相/単相、200V~230V(+10%,-15%)、50/60Hz
制御電源: 単相、200V~230V(+10%,-15%)、50/60Hz
100V 入力タイプ
主回路電源:単相、100V~115V(+10%,-15%)、50/60Hz
制御電源: 単相、100V~115V(+10%,-15%)、50/60Hz
(2)配線用遮断器
電源入力部には、IEC 規格および UL 規格(UL Listed)対応の配線用遮断器を使用してください。
(3)ノイズフィルタ
EN55011 グループ 1 クラス A 対応のノイズフィルタを使用してください。
(詳細は次ページ参照)
(4)トロイダルコア
電源入力部にトロイダルコアを設置してください。
ノイズフィルタによって、L1,L2,L3 およびアースに対して 4 ターン入力が有効である場合と、
アースをのぞく L1,L2,L3 に対して 1 ターンが有効である場合があります。
(詳細は次ページ参照)
(5)モータケーブル、エンコーダケーブル
モータケーブルおよびエンコーダケーブルにはシールド線を使用してください。
モータケーブルとエンコーダケーブルのシールドは、ドライバ付近およびモータ付近にて、クラ
ンプ接地をしてください。
FHA-8C/11C/14C、RSF-8B/11B/14B を使用する場合には、モータケーブルおよびエンコーダケ
ーブルにフェライトコアを入れてください。(モータ付近にて)
(6)インターフェースケーブル
HA-800C ドライバを使用する場合には、インターフェースケーブルにフェライトコアを使用し
てください。
(7)サージプロテクタ
AC 電源入力部にサージアブソーバを設置してください。サージアブソーバを内蔵した AC/DC
機械/装置の耐圧試験を行う場合には、サージアブソーバを外してください。
(サージアブソーバが破損する恐れがあります。)
(8)接地
感電防止のため AC サーボドライバの接地(アース)用端子
には、制御盤(収納箱)の
接地線を必ず、接続してください。
また、AC サーボドライバの接地(アース)端子
への接続は、共締めしないでください。
18
アクチュエータ・ドライバ関連規格について
EMC対策の推奨部品
(1)ノイズフィルタ
型式
SUP-P5H-EPR
仕様
定格電圧:Line-Line 440 to 550 V
定格電流:20A
定格電圧:Line-Line 440 to 550 V
定格電流:30A
定格電圧:Line-Line 440 to 550 V
定格電流:40A
定格電圧:250VAC
定格電流:10A
定格電圧:250VAC
定格電流:30A
定格電圧:250VAC
定格電流:40A
定格電圧:500VAC
定格電流:10A
定格電圧:500VAC
定格電流:20A
定格電圧:500VAC
定格電流:30A
定格電圧:250VAC
定格電流:5A
SUP-P10H-EPR
定格電圧:250VAC
定格電流:10A
岡谷電機産業株式会社
3SUP-H5H-ER-4
定格電圧:250VAC
定格電流:5A
岡谷電機産業株式会社
3SUP-H10H-ER-4
定格電圧:250VAC
定格電流:10A
岡谷電機産業株式会社
RF3020-DLC
RF3030-DLC
RF3040-DLC
HF3010A-UN
HF3030A-UN
HF3040A-UN
HF3010-SZC
HF3020-SZC
HF3030-SZC
メーカ
備考
RASMI ELECTRONICS LTD.
RASMI ELECTRONICS LTD.
RASMI ELECTRONICS LTD.
トロイダルコアは、
L1,L2,L3 およびアー
スに対して 4 ターン
入力してください。
双信電機株式会社
双信電機株式会社
双信電機株式会社
双信電機株式会社
トロイダルコアは、
ア ー ス を 除 く
L1,L2,L3 対して 1 タ
ーン入力してくださ
い。
双信電機株式会社
双信電機株式会社
岡谷電機産業株式会社
トロイダルコアは、
L1,L2,L3 およびアー
スに対して 4 ターン
入力してください。
また、電源入力部に
絶縁トランスとフェ
ライトコアを設置し
てください。
(3) ,(5)参照
(2)トロイダルコア
型式
MA070R-63/38/25A
LRF624520MK
外径
65 mm
66 mm
内径
36 mm
41 mm
メーカ
JFE フェライト株式会社
日本ケミコン株式会社
(3)フェライトコア
型式
ZCAT3035-1330
ZCAT2032-0930
ZCAT2132-1130
メーカ
TDK 株式会社
TDK 株式会社
TDK 株式会社
(4)サージプロテクタ
型式
RAV-781BXZ-4
RAV-781BWZ-4
LT-C32G801WS
LT-C12G801WS
メーカ
岡谷電機産業株式会社
岡谷電機産業株式会社
双信電機株式会社
双信電機株式会社
19
アクチュエータ・ドライバ関連規格について
(5)絶縁トランス
HA-800 シリーズは絶縁トランスを使用しなくても十分なノイズ耐性を持っていますが、ノイズ
環境が厳しいと考えられる場所では絶縁トランスの使用を推奨します。絶縁トランスを使用する
場合は以下の仕様の絶縁トランスをご用意ください。
20
ドライバ型式
相数
HA-800C-1*
3
HA-800C-3*
3
HA-800C-6*
3
HA-800C-24*
3
電源容量(kVA)
FHA-8,11C
FHA-14C
FHA-17C RSF-17
SHA20 SHA25 FHA-25C RSF-20,25 RKF-20,25
MAC08 MAB09
SHA25
SHA32 FHA-32C RSF-32 RKF-32 MAB12
SHA40 FHA-40C MAB15
SHA40 MAB15
SHA58 SHA65
MAA21
0.15
0.25
0.4
0.8
0.8
1.5
1.8
2.5
3.5
5.5
第
1章
機能と構成
ここでは、ドライバの型式、仕様、外形寸法等の概要を説明します。
1-1
1-2
1-3
1-4
1-5
1-6
1-7
1-8
1-9
ドライバの概要 ································································· 1-1
機能ブロック図 ································································· 1-2
機器構成図 ······································································· 1-3
ドライバの型式 ································································· 1-5
アクチュエータ、中継ケーブルの組み合わせ ······································ 1-6
ドライバの定格と仕様 ························································ 1-7
機能一覧 ········································································ 1-10
外形寸法 ········································································· 1-11
表示パネル各部の名称と機能 ············································· 1-13
1-1 ドライバの概要
機能と構成
1
2
3
4
1-1
HA-800C ドライバは、超薄型・精密制御用減速機ハーモニックドライブ®と偏平化した AC サーボモー
タを組み合わせた超薄型・中空軸構造アクチュエータ SHA シリーズ、FHA-C シリーズおよび、RSF/RKF
シリーズを駆動する専用ドライバです。
HA-800C ドライバは、各アクチュエータの特徴を最大限発揮できるように多くの特長を備えています。
機能の概要
CC-Link
7
2 局占有により、速度制御やトルク制御も可能
2 局占有でご使用いただいた場合は、速度制御やトルク制御でもご使用いただくことが可能です。
また全ての制御モードは、HA-800C の電源を再投入することなく切り替えてご使用いただくこ
とができます。
制御モードの切り替えが可能
CC-Link の、RYn*及び、RWwn*の設定により、位置制御、速度制御及びトルク制御を切り替
えて使用することが可能です。
8
9
10
11
Ver1.10 に対応
CC-Link Ver1.10 で規定している全ての通信速度と局番に対応していますので、他の CC-Link
対応機器と組み合わせてシステムの構築が容易にできます。
5
6
ドライバの概要
独自の制御理論により位置決め整定時間を1/2に短縮(HA-655 比)
独自の制御理論により位置決め時のオーバーシュート、アンダーシュートを抑え位置決め整定時
間を、従来機の 1/2 に短縮しています。
オートチューニング機能を搭載
オートチューニング機能を搭載していますので、負荷を推定して最適なサーボゲインを自動で設
定することができます。
充実した専用ソフトウェア
HA-800C を位置制御でご使用いただく場合で、あらかじめ目標位置が分かっている場合、事前
に動作量を記憶する専用ソフト、PSF-680CL Ver2 を準備しています。また、HA-800C ドライ
バのパラメータを変更および、動作状態をモニタする専用のソフトウェア“PSF-800”を用意し
ています。
付
1-1
1-2 機能ブロック図
機能ブロック図
機能と構成
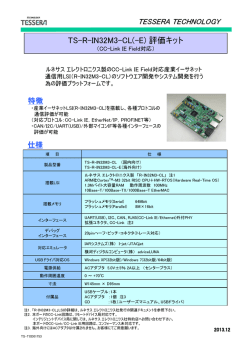
1-2
1
2
本ドライバの内部機能ブロック図を示します。
外付けの場合
TB1 R1
TB2
R3
3
R2
*1
ダイオード
パワー部
V
S
チャージ
回生回路
s
ダイナミック
制御
電源
CN4
CC-Link
CN2
5
W
ランプ
T
r
4
TB1
U
R
ブレーキ
過電流検出
冷却ファン
*2 電圧検出
ゲートドライブ
ネットワーク
制
御
演
算
入力信号 I/F
出力信号 I/F
CN3
RS-232C I/F
CN9
アナログモニタ I/F
デジタルモニタ I/F
DAC
6
CN1
7
エンコーダ I/F
操作部 I/F
操作部
ENC モニタ I/F
接地
電流検出
バッテリ
オプション
*3
8
9
制御部
10
*1:内蔵回生抵抗は HA-800-1 にはありません。
*2:HA-800-6 以上に冷却ファンがつきます。
*3:アブソリュートエンコーダの場合バッテリが必要です。
11
付
1-2
1-3 機器構成図
機能と構成
1
2
3
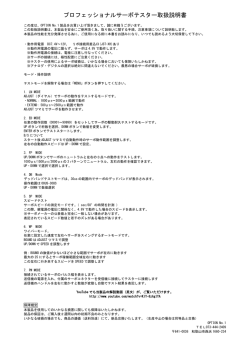
1-3
機器構成図
本ドライバの基本的な構成図を示します。
HA-800C-1,3,6-200
供給電源*1
4
配線用遮断機*1
5
サージアブソーバー*1
6
上位機器*1
7
ノイズフィルタ*1
8
サーボアクチュエータ
CN2
9
I/O 信号用
10
TB1
動力ケーブル
電磁接触器
*1
11
CN1
CN4
主電源*1
付
制御電源*1
エンコーダケーブル
CC-Link 専用ケーブル*1
TB2
電源用ケーブル*1
CC-Link ユニット*1
CN3
専用通信
ケーブル
パソコン*1
*1:お客様で別途にご用意ください。
*2:AC200V 3 相の場合を示します。アクチュエータの
機種によっては、AC200V 単相/AC100V 単相での
使用も可能です。
接続例は P2-6を参照ください。
1-3
⇧
インストール
通信ソフトウェア
(PSF-800/PSF-680CL)
1-3 機器構成図
機能と構成
1
HA-800C-24-200
2
供給電源*1
3
配線用遮断機*1
4
5
サージアブソーバー*1
ノイズフィルタ*1
6
上位機器*1
7
電磁接触器
*1
主電源*1
8
サーボアクチュエータ
9
CN2
10
I/O 信号用
電源用ケーブル*1
CN1
エンコーダケーブル
11
動力ケーブル
制御電源*1
CN4
CC-Link 専用ケーブル*1
CN3
専用通信
ケーブル
付
CC-Link ユニット*1
パソコン*1
*1:お客様で別途にご用意ください。
*2:AC200V 3 相専用です。
接続例は P2-7を参照ください。
⇧
インストール
通信ソフトウェア
(PSF-800/PSF-680CL)
1-4
1-4 ドライバの型式
機能と構成
1
2
3
1-4
ドライバの型式
ここでは、ドライバの型式名と記号の見かた、別売品について説明します。
ドライバの型式
HA-800C-3A-200-SP
4
機種:AC サーボドライバ HA シリーズ
シリーズ名:800 シリーズ
800A I/O 指令タイプ
800B MECHATROLINK-Ⅱ対応タイプ
800C CC-Link 対応タイプ
定格出力電流:
1
1.5A
3
3A
6
6A
24
24A
対応エンコーダ*:
A
13bit アブソリュートエンコーダ
B
14 本線インクリメンタルエンコーダ
C
4 本省線インクリメンタルエンコーダ
D
17bit アブソリュートエンコーダ
E
17bit エンコーダインクリメンタル仕様
電源電圧:
200
AC200V
100
AC100V
特殊品記号:
無印
標準品
SP
特殊品
5
6
7
8
9
10
11
付
*:対応エンコーダの詳細については、4章を参照してください。
別売品
中継ケーブル(別売)
「1-5 アクチュエータ、中継ケーブルの組み合わせ」を参照してください。
専用通信ケーブル(別売)
型式 EWA-RS03
コネクタ(別売)
型式 CNK-HA80C-S1/ CNK-HA80C-S2/ CNK-HA80C-S1-A/ CNK-HA80C-S2-A
サーボパラメータ設定ソフトウェア
PSF-800(弊社ホームページ[http://www.hds.co.jp/]よりダウンロード可能)
アブソリュートエンコーダ用バックアップ電池
HAB-ER17/33(ドライバ購入時に添付)
1-5
1-5 アクチュエータ、中継ケーブルの組み合わせ
アクチュエータ、中継ケーブルの組み合わせ
ここでは、ドライバとアクチュエータおよび中継ケーブル(別売品)の組み合わせについて説明しま
す。
アクチュエータ
シリーズ名
型番
20
FHA-Cmini
シリーズ
FHA-C
シリーズ
RSF シリーズ
エンコーダ
タイプ
組み合わせドライバ
HA-800C
32
40
200
100
200
200
200
40
200
58
200
HA-800C-24D/E-200
65
200
HA-800C-24D/E-200
8
11
14
8
11
14
8
11
14
8
11
14
17
25
32
40
17
25
32
40
17
25
200
200
200
100
100
100
200
200
200
100
100
100
200
200
200
200
200
200
200
200
100
100
HA-800C-1C-200
HA-800C-1C-200
HA-800C-1C-200
HA-800C-1C-100
HA-800C-1C-100
HA-800C-1C-100
HA-800C-1D/E-200
HA-800C-1D/E-200
HA-800C-1D/E-200
HA-800C-1D/E-100
HA-800C-1D/E-100
HA-800C-1D/E-100
HA-800C-3C-200
HA-800C-3C-200
HA-800C-6C-200
HA-800C-6C-200
HA-800C-3A-200
HA-800C-3A-200
HA-800C-6A-200
HA-800C-6A-200
HA-800C-3C-100
HA-800C-6C-100
32
100
17
25
100
100
32
100
17
200
25
SHA
シリーズ
電源電圧
(V)
17bit
アブソリュート
4 本省線
インクリメンタル
17bit
アブソリュート
4 本省線
インクリメンタル
13bit
アブソリュート
4 本省線
インクリメンタル
13bit
アブソリュート
14 本線
インクリメンタル
HA-800C-3D/E-200
HA-800C-6D/E-100
HA-800C-3D/E-200
HA-800C-6D/E-200
HA-800C-6D/E-200
HA-800C-24D/E-200
HA-800C-6C-100
HA-800C-3A-100
HA-800C-6A-100
HA-800C-6A-100
HA-800C-3B-200
2
3
中継ケーブル
(別売品)
4
モータ線
EWD-MB**-A06-TN3
エンコーダ線
EWD-S**-A08-3M14
モータ線
型番 40:EWD-MB**-A06-TMC
型番 58,65:EWD-MB**-D09-TMC
エンコーダ線
型番 40:EWD-S**-A08-3M14
型番 58,65:EWD-S**-D10-3M14
5
6
7
モータ線
EWC-M**-A06-TN3
エンコーダ線
EWC-E**-M06-3M14
8
モータ線
EWC-M**-A06-TN3
エンコーダ線
EWD-S**-A08-3M14
9
10
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-E**-B04-3M14
11
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-S**-B08-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-E**-B04-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-S**-B08-3M14
付
モータ線
EWA-M**-A04-TN3
エンコーダ線
EWA-E**-A15-3M14
20
200
HA-800C-3B-200
25
200
HA-800C-3B-200
32
200
HA-800C-6B-200
*1:アクチュエータ SHA40A では組み合わせるドライバによって最大トルクと許容連続トルク、使用可能領域が
異なります。用途に合わせた選択をしてください。SHA シリーズ技術資料の「使用可能領域」を参照ください。
*2:中継ケーブル型式表記中の * * はケーブル長を示します。3 種類の長さから選定してください。
03:3m、05:5m、10:10m
RSF/RKF
シリーズ
機能と構成
1-5
1
1-6
1-6 ドライバの定格と仕様
機能と構成
1
2
3
4
1-6
ドライバの定格と仕様
ここでは、本ドライバの定格と仕様について説明します。
電源電圧
型式
ドライバ定格電流*1
ドライバ最大電流*1
主回路
電源電圧
制御回路
5
6
電源周波数
多回転限界 13bit アブソ
(モータ軸) 17bit アブソ
7
8
9
11
付
周囲条件
使用温度:0~50℃ 保存温度:-20~65℃
使用・保存湿度:95%RH 以下で結露のないこと
2
2
耐振動:4.9 m/s (10~55Hz、X,Y,Z 各方向 2h にて試験) 耐衝撃: 98 m/s (X,Y,Z 各方向 1 回試験)
雰囲気:金属粉、塵粉、オイルミスト、腐食性ガスのないこと
指令方式
構造
取り付け方法
制御モード
入力信号
出力信号
CC-Link Ver1.10 1 局 or 2 局占有
自然空冷
強制空冷
自然空冷
強制空冷
ベースマウント(壁面取り付け)
位置制御、速度制御、トルク制御 (速度制御と、トルク制御は 2 局占有時のみ可能)
非常停止、アラームクリア、偏差クリア、原点信号
Ready、アラーム、原点認識完了、Z 信号(オープンコレクタ出力)
モニタ端子
デジタル I/O ポート
操作パネル
10
保
護
機
能
200V 仕様
100V 仕様
HA-800C-1* HA-800C-3* HA-800C-6* HA-800C-1* HA-800C-3* HA-800C-6*
-200
-200
-200
-100
-100
-100
1.5 A
3.0 A
6A
1.5 A
3.0 A
6A
4.0 A
9.5 A
19.0 A
4.0 A
9.5 A
19.0 A
AC200~230V(単相*2*3/三相)
AC100~115V(単相)+10%~-15%
+10%~-15%
AC200~230V(単相)
AC100~115V(単相)+10%~-15%
+10%~-15% 30VA
30VA
50/60Hz
-
-4,096~4,095
-
-4,096~4,095
-32,768~32,767
-32,768~32,767
構成
状態表示機能
パラメータ調整機能
アラーム
ワーニング
回生処理
回生抵抗吸収電力
内蔵機能
3ch モータ回転速度、電流指令、汎用出力(パラメータ選択)
RS-232C
状態モニタ、各種パラメータ設定、(PSF-800)
動作データ作成、原点復帰/動作関係パラメータ設定 (PSF-680CL Ver2)
表示器(7segLED)5 桁(赤)、押しボタンスイッチ 4 個
回転速度(r/min)、トルク指令(%)
、負荷率(%)、入力信号モニタ、出力信号モニタ、
アラーム履歴(8 回)等
システムパラメータ
3,4
調整パラメータ
非常停止、過速度、過負荷、IPM エラー(過電流)、回生抵抗過熱、エンコーダ断線、エンコーダ受信異常、
UVW 異常、システムダウン、多回転オーバーフロー、多回転データエラー、偏差過大、メモリ異常、
FPGA コンフィグエラー、FPGA 設定エラー、MEMORY エラー、一回転データ異常、BUSY エラー、
過熱エラー、通信エラー
バッテリ電圧低下、過負荷状態、冷却ファン停止、主回路電源電圧低下、正転禁止入力中、
逆転禁止入力中
外部回生抵抗
外部回生抵抗
回生抵抗内蔵
回生抵抗内蔵
取り付け端子
取り付け端子
外部回生抵抗取り付け端子付き
外部回生抵抗取り付け端子付き
付き
付き
-
3W Max
8W Max
-
3W Max
8W Max
状態表示機能、自己診断機能、電子ギヤ、JOG 運転等、ダイナミックブレーキ、
多回転データバックアップ用バッテリ
内蔵(主回路電圧監視による、CPU 制御)
突入電流防止機能
状態表示(通常動作)モード、テストモード、調整モード、システムパラメータ設定モード
動作モード
1kg
1.2kg
1kg
1.2kg
質量
*1: 組み合わせアクチュエータの仕様により設定されています。
*2:FHA-Cmini(FHA-8C/11C/14C)および FHA-17C との組合せの場合、200V 三相入力または 200V 単相入力で
の使用が可能です。
*3:SHA シリーズ、FHA-25C/32C/40C と組合せる場合は、200V 三相入力を推奨します。 出力をディレーティ
ングすることで、200V 単相入力でも使用可能です。アクチュエータ連続使用領域を 100%として、回転速度
または出力トルクのいずれかをディレーティングしてください。
1-7
1-6 ドライバの定格と仕様
アクチュ
エータ
減速比
ディレー
ティング
SHA20A
50/80/
100/120/160
100%
SHA32A
51/81/
101/121
SHA32A
11/161
70%
60%
80%
SHA32A
50/80/
100
SHA40A
SHA32A SHA32A 50/80/100/120/160
120
160
(HA-800A-6 組合せ)
SHA25A
SHA25A
50/80/
160
100/120
40%
SHA40A
FHA-25C
51/81/101/121/161
50/100/
160
(HA-800C-6 組合せ)
SHA25A
11/161
70%
60%
80%
30%
100%
60%
FHA-32C
50/100/
160
FHA-40C
50/100/
160
80%
40%
1
機能と構成
アクチュ
SHA20A
SHA25A
51/81/
51/81/
エータ
減速比 101/121/161 101/121
ディレー
100%
40%
ティング
2
3
30%
4
5
6
7
8
9
10
11
付
1-8
1-6 ドライバの定格と仕様
機能と構成
1
2
3
4
200V 仕様
HA-800C-24*
24 A
55 A
AC200~230V(三相)+10%~-15%
AC200~230V(単相)+10%~-15%
30VA
電源周波数
50/60Hz
多回転限界(モータ軸)
-32,768~32,767(17bit アブソ)
使用温度:0~50℃ 保存温度:-20~65℃
使用・保存湿度:95%RH 以下で結露のないこと
周囲条件
耐振動:4.9 m/s2(10~55Hz、X,Y,Z 各方向 2h にて試験)
耐衝撃:98 m/s2(X,Y,Z 各方向 1 回試験)
雰囲気:金属粉、塵粉、オイルミスト、腐食性ガスのないこと
電源電圧
型式
ドライバ定格電流*1
ドライバ最大電流*1
主回路
電源電圧
制御回路
5
構造
取り付け方法
制御モード
入力信号
出力信号
6
7
9
10
11
付
モニタ端子
デジタル I/O ポート
操作パネル
8
CC-Link Ver1.10
指令方式
構成
状態表示機能
パラメータ調整機能
保
護
機
能
アラーム
ワーニング
回生処理
回生抵抗吸収電力
内蔵機能
1 局 or
2 局占有
強制空冷型
ベースマウント(壁面取り付け)
位置制御、速度制御、トルク制御 (速度制御と、トルク制御は 2 局占有時のみ可能)
非常停止、アラームクリア、偏差クリア、原点信号
Ready、アラーム、原点認識完了、Z 信号(オープンコレクタ出力)
3ch
モータ回転速度、電流指令、汎用出力(パラメータ選択)
RS-232C
状態モニタ、各種パラメータ設定、 (PSF-800)
動作データ作成、原点復帰/動作関係パラメータ設定 (PSF-680CL Ver2)
表示器(7segLED)5 桁(赤)、押しボタンスイッチ 4 個
回転速度(r/min)、トルク指令(%)、負荷率(%)、入力信号モニタ、
出力信号モニタ、アラーム履歴(8 回)等
システムパラメータ 3,4 調整パラメータ
非常停止、過速度、過負荷、IPM エラー(過電流)、回生抵抗過熱、エンコーダ断線、エンコーダ受信異常、
UVW 異常、システムダウン、多回転オーバーフロー、多回転データエラー、偏差過大、メモリ異常、
FPGA コンフィグエラー、FPGA 設定エラー、MEMORY エラー、一回転データ異常、BUSY エラー、
過熱エラー、通信エラー、1 相欠如エラー、主回路低電圧エラー、過回生エラー、回生電力過大エ
ラー
バッテリ電圧低下、過負荷状態、主回路電源電圧低下、正転禁止入力中、
逆転禁止入力中
回生抵抗内蔵
外部回生抵抗取り付け端子付き
90W Max
状態表示機能、自己診断機能、電子ギヤ、JOG 運転等、ダイナミックブレーキ、
多回転データバックアップ用バッテリ
内蔵(主回路電圧監視による、CPU 制御)
突入電流防止機能
状態表示(通常動作)モード、テストモード、調整モード、システムパラメータ設定モード
動作モード
質量
5.8kg
*1:組み合わせアクチュエータの仕様により設定されています。
1-9
1-7 機能一覧
機能一覧
ここでは、本ドライバの機能の一覧を説明します。
P:位置制御
S:速度制御
T:トルク制御
位置制御モード
位置制御サーボとして動作します。
適用制御
モード
P
速度制御モード
速度制御サーボとして動作します。
S
機能
内容
トルク制御モード
トルク制御サーボとして動作します。
絶対位置エンコーダの搭載アクチュエータでは 1 度
絶対位置センサ
絶対位置設定すると、以後の電源再投入時に現在位
置が認識できます。
アクチュエータの持つハーモニックドライブ®の特
位置決め時間短縮
性を制御理論に生かし、位置決め時間を短縮します。
JOG モードにて負荷を推定し適切なサーボゲイン
オートチューニング
を自動で設定することができます。
発生する回生がドライバの許容値を超えるとき、回
回生処理
生抵抗の外付け用に利用します。
過去 8 回までのアラーム内容と発生時間を表示しま
アラーム履歴表示
す。
アラーム履歴クリア
アラームの履歴をクリアします。
アラーム発生時にアラーム内容表示とアラーム出力
アラームコード出力
します。
ワーニング(警告)発生時にワーニング内容表示と
ワーニング出力
アラーム出力します。
電子ギヤの分子、分母値を設定することでパルス入
電子ギヤ
力の重み(倍数)を変えることができます。
(インクリメンタルエンコーダのみ)
上位入出力信号にかかわり無くアクチュエータの
JOG 運転
JOG 運転ができ、電源、モータ線、エンコーダの配
線が正常か動作確認できます。
サーボドライバの状態の表示と要求によりモニタが
状態表示モード
可能です。
入出力信号モニタ、出力信号操作、ジョグ操作やオ
テストモード
ートチューニング等の機能を持ちます。
サーボゲインや位置決め完了範囲等のサーボシステ
調整モード
ムにかかわる各種設定を行います。
システムパラメータモード HA-800C の各種機能設定を行います。
モータ速度、モータ電流が電圧レベルとしてモニタ
アナログモニタ出力
できます。
状態モニタ出力
選択されたサーボ状態がモニタできます。
出力軸 1 回転アブソリュー インデックス割出等、一方向にのみ回転し続ける場
ト機能※(SHA-CG-S のみ) 合でも、絶対位置情報を正確に管理できます。
出力軸で 3.6 万、36 万、360 万分割設定を選択でき、
出力軸分割機能※
角度単位で動作指令を設定できます。
アブソリュートエンコーダ 17bit アブソリュートエンコーダをインクリメンタ
機能設定
ルエンコーダとして使用できます。
機能と構成
1-7
1
2
3
参照
P13-19
T
すべて
P4-8
P4-16
P
P3-17
すべて
P9-10
すべて
P2-17
すべて
P7-8
すべて
P7-10
4
5
6
7
P7-9
8
P
P8-2
9
すべて
P9-4
10
すべて
P7-1
すべて
9章
すべて
7章
すべて
8章
すべて
P5-9
すべて
P
P8-2
P8-8
付録-6
P8-8
付録-6
すべて
P8-8
すべて
すべて
すべて
11
付
※HA-800 ソフトウェアバージョン 3.x から使用可能です。
1-10
1-8 外形寸法
機能と構成
1
2
3
1-8
外形寸法
ここでは、本ドライバの外形寸法を示します。
HA-800C-1/3(質量:1kg)
4
5
6
7
8
9
HA-800C-6(質量:1.2kg)
10
11
付
1-11
1-8 外形寸法
HA-800C-24(質量:5.8kg)
機能と構成
1
2
3
4
5
6
7
8
9
10
11
付
1-12
1-9 表示パネル各部の名称と機能
機能と構成
1
2
1-9
表示パネル各部の名称と機能
ここでは、本ドライバ正面の操作部の説明と各機能について説明します。
HA-800C-1/HA-800C-3/HA-800C-6
3
ロータリスイッチ(SW3)
4
5
6
7
8
9
10
11
付
CC-Link の通信速度を設定し
ます。
「13章 CC-Link 通信機能」
ディップスイッチ(SW4)
CC-Link の占有局数を設定し
ます。
「13章 CC-Link 通信機能」
LED 表示部
ドライバの状態表示、アラー
ム表示、データ値等の確認が
できます。
押しボタンスイッチ
4 種類のスイッチで表示の切り替え、
各種機能設定、JOG 操作に使用しま
す。「6章パネル表示と操作」
CHARGE ランプ
主回路電源投入時に点灯します。
電源オフ後の点灯時は高圧充電
中です。電源コネクタに触れない
でください。
カバーを開けた状態
ロータリスイッチ(SW1,2)
CC-Link の局番を設定します。
上:SW2 10 の位(出荷時 0)
下:SW1 1 の位(出荷時 1)
「13章 CC-Link 通信機能」
メンテナンス用コネクタ
接続しないでください。
波形モニタ用コネクタ
速度、電流波形モニタと状態信号モニタ
ができます。
「モニタ出力」(P5-9)
通信状態モニタ LED
LRUN:HA-800C が CC-Link ネットワ
ークに参加している時に点灯します。
SD:HA-800C が、CC-Link 回線にデー
タを送信中に点灯します。
RD:HA-800C が、CC-Link 回線からデ
ータを受信したときに点灯します。
LERR:以下の場合に点滅します。
① 局番、通信速度の設定に異常が
ある。(PSF-680CL を接続する
ために局番設定を 70 にした場合
も点灯します)
② 動作中に、局番設定を変えた。
③ 通信回線がノイズ等の影響により
不安定
サーボモータ接続端子(U,V,W)
入出力信号接続コネクタ(CN2)
サーボモータの動力線を接続し
ます。「ドライバ・モータ間の配
線」P2-17
指令信号や I/O 入出力信号の接
続コネクタです。
「5章入出力信号」
回生抵抗接続端子(R1,R2,R3)
外付け用回生抵抗接続端子です。
回生が不足する場合に接続しま
す。
「ドライバ・モータ間の配線」
P2-17
主回路電源接続端子(T,S,R)
主回路電源接続端子です。
「電源の接続」P2-5
制御回路電源接続端子(s,r)
制御回路電源接続端子です。
「電源の接続」P2-5
接地端子
感電保護のための接地(アー
ス)端子です。必ず接続して
ください。
「接地線の接続」P2-8
1-13
エンコーダ接続コネクタ(CN1)
サーボアクチュエータのエン
コーダとの接続コネクタです。
型式により接続法が異なりま
すので、ご注意ください。
「エンコーダとの接続」P2-18
CC-Link 通ネクタ
(CN4)
CC-Link 通信用コネクタです
「13章 CC-Link 通信機能」
PSF-800 用通信コネクタ(CN3)
ドライバ専用通信ソフトウエ
ア PSF-800/PSF-680CL 用の通
信コネクタです。「10章通信ソ
フトウェア」
1-9 表示パネル各部の名称と機能
HA-800C-24
ロータリスイッチ(SW3)
1
メンテナンス用コネクタ
接続しないでください。
波形モニタ用コネクタ
速度、電流波形モニタと状態信
号モニタができます。
「モニタ出力」(P5-9)
カバーを開けた状態
CC-Link の通信速度を設定します。
「13章 CC-Link 通信機能」
通信状態モニタ LED
LRUN:HA-800C が CC-Link ネットワ
ークに参加している時に点灯します。
SD:HA-800C が、CC-Link 回線にデー
タを送信中に点灯します。
RD:HA-800C が、CC-Link 回線から
データを受信したときに点灯します。
LERR:以下の場合に点滅します。
① 局番、通信速度の設定に異常があ
る。(PSF-680CL を接続するた
めに局番設定を 70 にした場合
も点灯します)
② 動作中に、局番設定を変えた。
③ 通信回線がノイズ等の影響により
不安定
ディップスイッチ(SW4)
CC-Link の占有局数を設定します。
「13章 CC-Link 通信機能」
LED 表示部
ドライバの状態表示、アラー
ム表示、データ値等の確認が
できます。
主回路電源接続端子
主回路電源接続端子(R,S,T)
主回路電源接続端子です。
「電源の接続」P2-5
押しボタンスイッチ
CHARGE ランプ
4 種類のスイッチで表示の切り替
え、各種機能設定、JOG 操作に
使用します。
「6章パネル表示と操作」
主回路電源投入時に点灯します。
電源オフ後の点灯時は高圧充電
中です。電源コネクタに触れない
でください。
入出力信号接続コネクタ(CN2)
メインテナンス用端子
指令信号や I/O 入出力信号の接
続コネクタです。
「5章入出力信号」
-端子、P 端子には配線を
しないでください。
直流リアクトル接続端子(DL1,DL2)
DL1-DL2 間は、工場出荷時にショ
ートバーにて短絡しています。通常
はこのショートバーを外さずに使
用してください。
エンコーダ接続コネクタ(CN1)
サーボアクチュエータのエン
コーダとの接続コネクタです。
型式により接続法が異なりま
すので、ご注意ください。
「エンコーダとの接続」P2-18
回生抵抗接続端子(R1,R2,R3)
外付け用回生抵抗接続端子です。
回生が不足する場合に接続しま
す。「ドライバ・モータ間の配線」
P2-17
サーボモータ接続端子(U,V,W)
サーボモータの動力線を
接続します。「ドライバ・
モータ間の配線」P2-17
制御回路電源接続端子(r,s)
制御回路電源接続端子です。
「電源の接続」P2-5
接地端子
感電保護のための接地(アース)
端子です。必ず接続してください。
「接地線の接続」P2-8
CC-Link コネクタ(CN4)
CC-Link 通信用コネクタです。
「13章 CC-Link 通信機能」
PSF-800 用通信コネクタ(CN3)
PSF-800/PSF-680CL(Ver2.0 以上)
用の通信コネクタです。別途専用の
通信ケーブルが必要です。
1-14
機能と構成
ロータリスイッチ(SW1,2)
CC-Link の局番を設定します。
上:SW2 10 の位(弊社出荷時 0)
下:SW1 1 の位(弊社出荷時 1)
「13章 CC-Link 通信機能」
2
3
4
5
6
7
8
9
10
11
付
1-9 表示パネル各部の名称と機能
機能と構成
1
2
3
4
5
6
7
8
9
10
11
付
1-15
第
2章
設置・配線
ここでは、物品の確認、環境、電源配線、ノイズ処理およびコネクタ配線に関る内容を
説明します。
2-1
2-2
2-3
2-4
2-5
2-6
品物の確認 ······································································· 2-1
設置場所と設置工事 ··························································· 2-2
電源の接続 ······································································· 2-5
ノイズ対策 ····································································· 2-14
ドライバ・モータ間の配線 ················································ 2-17
上位機器との配線 ···························································· 2-19
2-1 品物の確認
1
設置・配線
2
3
2-1
品物の確認
開封後は次のことを確認してください。
確認の手順
4
1
5
2
破損していないか確認します。
破損している場合は、すぐに購入先へご連絡ください。
ご注文品に間違いないか確認します。
本ドライバ前面の表示パネル部の下に記載されている型式記号より確認してください。
型式の確認方法は、
「ドライバの型式」
(P1-5)を参照してください。
6
本ドライバの右側面の銘板より型式、電源電圧、組合せアクチュエータを確認してください。
型式が違う場合は、すぐに購入先へご連絡ください。
7
銘板
ドライバの型式を示します。
8
適用の電源を示します。
本ドライバと組合わせる適用の
アクチュエータの型式と調整機種コー
ドを示します。
9
ドライバ毎のシリアル番号です。
10
ドライバ品番を示します。
11
付
銘板記載と異なるアクチュエータを組み合わせないでください。
警
告
本ドライバの特性は、アクチュエータと併せて調整してあります。異なる「HA-800C
ドライバ」とアクチュエータの組み合わせは、トルク不足や過電流によるアクチュエ
ータの焼損を起こす可能性があり、けがや火災を起こすおそれがあります。
銘板記載と異なる電圧の電源と接続しないでください。
銘板に記載されている電源電圧と異なる電源と接続すると、「HA-800C ドライバ」を
破損させ、けがや火災を起こすおそれがあります。
2-1
2-2 設置場所と設置工事
2-2
1
設置場所と設置工事
2
本ドライバは、以下のような条件を満たすように設置してください。
設置・配線
設置環境
3
0℃~50℃
ボックス内に収納してください。ボックス内の温度は、内蔵される機器の電力損失およびボ
ックスの大きさなどにより、外気温度より高くなることがあります。必ずドライバの周辺温
度が 50℃以下になるように、ボックスの大きさや冷却、配置を考慮してください。
相対湿度 95%以下、ただし結露のないこと
昼夜の温度差が大きい場所や運転・停止がたびたび起こる使用状態では、結露が発生する可
能性が高いのでご注意ください。
4.9m/s2(0.5G)(10Hz~55Hz)以下(10~55Hz X,Y,Z 各方向 2h にて試験)
近くに振動源のある場合、ショックアブソーバを介してベースに取り付け、振動が直接伝わ
らないようにしてください。
使用温度
使用湿度
振動
衝撃
4
5
6
98m/s2(10G)以下(X,Y,Z 各方向 1 回試験)
その他
チリ、ほこり・結露・金属粉・腐食性ガス・水・水滴・オイルミスト等のないこと
腐食性ガスのある環境では、接点部品(コネクタ等)の接触不良事故になるおそれがありま
すので避けてください。
直射日光があたらないようにしてください。
7
8
設置にあたっての注意事項
本ドライバは、垂直にして、周囲は空気の流れが良くなるように十分空間を設けて、取り付けます。
壁または隣の装置より 30mm 以上離し、床から 50mm 以上、天井から 50mm 以上離して設置してくだ
さい。
10
冷却システム計画の参考として HA-800 ドライバの電力損失を次表に示します。
FHA-C シリーズ(200V)
ドライバ
アクチュエータ
電力損失
FHA-8C
25W
HA-800C-1
FHA-11C
FHA-14C
30W
40W
HA-800C-3
FHA-17C
FHA-25C
30W
40W
9
HA-800C-6
FHA-32C
FHA-40C
50W
60W
11
RSF/RKF シリーズ
HA-800C-1
アクチュエータ
RSF-17
電力損失
35W
HA-800C-3
RSF/RKF RSF/RKF
-20
-25
40W
55W
HA-800C-6
RSF/RKF
-32
60W
空気流
HA-800C-3
SHA20
35W
ドライバ
アクチュエータ
電力損失
SHA40
130W
SHA シリーズ(100V)
ドライバ
アクチュエータ
電力損失
HA-800C-6
SHA25
40W
HA-800C-3
SHA25
35W
HA-800C-24
SHA58
130W
HA-800C-6
SHA32
SHA40
65W
80W
30mm 以上
冷却ファン
30mm 以上 30mm 以上
壁取り付け
SHA65
130W
空気流
50mm 以上
ドライバ
アクチュエータ
電力損失
付
空気流
収納箱
SHA シリーズ(200V)
50mm 以上
ドライバ
ドライバ
空気流
エアフィルタ
2-2
2-2 設置場所と設置工事
1
設置・配線
2
3
4
5
取り付け手順
[HA-800C-1, HA-800C-3, HA-800C-6]
取り付けは、背面にある取り付け穴 2 個を使用します。また、取り付ける壁面は、厚さ 2mm 以上の鉄
板としてください。
1
2
3
4
取り付け面下部のねじ穴に M4 ビスを中間までねじ込みます。
本ドライバ下部の取り付け穴(切りかぎ付き)を 1 で取り付けたビスに引っかけます。
本ドライバ上部の取り付け穴と取り付け面の穴とを M4 ビスで固定します。
下部の M4 ビスをしっかり締め込みます。
HA-800C-1/3
6
7
8
9
10
11
HA-800C-6
付
2-3
2-2 設置場所と設置工事
[HA-800C-24]
1
取り付ける壁面は、厚さ 5mm 以上の鉄板を推奨します。
2
本ドライバ下部の取り付け穴(U 字)に M5 ビスを中間までねじ込みます。
本ドライバ上部の取り付け穴(U 字)を M5 ビスで固定します。
設置・配線
1
2
3
本ドライバ下部のビスも固定します。
3
8 個全てのビスが確実に固定されていることを確認します。
HA-800C-24
4
5
6
7
8
9
10
11
付
2-4
2-3 電源の接続
1
電源の接続
本ドライバへの電源接続について説明します。
設置・配線
2
2-3
3
電源ケーブルを「HA-800C ドライバ」に接続する前に、電源ケーブルを完全に元電
源から切り離してください。接続作業中に感電する可能性があります。
警
4
5
注
告
意
(1) 「HA-800C ドライバ」を所定の壁面に設置後、電源ケーブルを「HA-800C ドラ
イバ」に接続してください。
(2) 感電防止、外来ノイズによる「HA-800C ドライバ」の誤動作防止およびラジオ
ノイズ低減のため、必ず接地(アース)してください。
6
7
8
9
10
11
付
ケーブルの許容サイズ
電源ケーブル、接地線ケーブル、その他の電線サイズの最小許容値を下表に示します。できるだけ太
い電線を採用することを推奨します。
結束する場合、ダクト・硬質ビニル管・金属管に入れる場合は、電線の許容値を 1 サイズ上げてくだ
さい。
HIV(特殊耐熱ビニル線)の使用を推奨します。
[200V 三相 入力]
ドライバ
HA-800C-1
組合せアクチュエータ
組合せモータ
FHA-8C
FHA-11C
FHA-14C
主回路
電源用
制御回路
電源用
モータ
*1
ケーブル
接地線
(FG)
回生抵抗用
エンコーダ
ケーブル
制御信号線
最小許容電線サイズ(mm2)
HA-800C-3
HA-800C-6
HA-800C-24
SHA20
SHA32
FHA-17C SHA25 FHA-32C SHA40 SHA40
SHA58
MAA21
FHA-25C MAC08 FHA-40C MAB12 MAB15 SHA65
MAB09
MAB15
R,S,T
0.75
1.25
r, s
0.75
1.25
U,V,W,E
接地
マーク
R1,R2
0.5
0.725
0.75
2.0
3.5
1.25
1.25
3.5
1.25
1.25
3.5
2.0
5.5
1.25
2.0
*2
(1.25)
2.0
*2
(1.25)
3.5
3.5
1.25
2
3.5
5.5
*3
(3.5)
3.5
5.5
3.5
*1
CN1
0.3mm 以上のツイストペアシールド線
CN2
ツイストペア線、またはツイストペア一括シールド線(AWG24、0.2 mm )
2
*1:当社では、モータケーブル(ブレーキケーブルを含む)とエンコーダケーブルの中継ケーブル(3m/5m/10m)
を用意しています。
HA-800C ドライバ、アクチュエータ、中継ケーブルの組み合わせは、
「アクチュエータ、中継ケーブルの組み
合わせ」(P1-6)を参照してください。
*2:1.25mm2 は 105℃耐熱電線の場合です。HIV 線を使用する場合は 2mm2 以上を推奨します。
*3:3.5mm2 は 105℃耐熱電線の場合です。HIV 線を使用する場合は 5.5mm2 以上を推奨します。
2-5
2-3 電源の接続
[100V 単相 入力]
ドライバ
主回路
電源用
制御回路
電源用
モータ
*1
ケーブル
接地線
(FG)
回生抵抗用
エンコーダ
ケーブル
制御信号線
FHA-17C
FHA-25C
FHA-32C
SHA25
MAB09
2.0
2.0
R,S
0.75
1.25
r, s
0.75
1.25
1.25
0.75
2.0
*2
(1.25)
3.5
3.5
1.25
1.25
U,V,W,
E
接地
マーク
R1,R2
0.5
0.725
3.5
1.25
2
CN1
CN2
0.3mm 以上のツイストペアシールド線
2
設置・配線
組合せアクチュエータ
組合せモータ
HA-800C-1
FHA-8C
FHA-11C
FHA-14C
1
最小許容電線サイズ(mm2)
HA-800C-3
HA-800C-6
3
4
5
*1
2
ツイストペア線、またはツイストペア一括シールド線(AWG24、0.2 mm )
*1:当社では、モータケーブル(ブレーキケーブルを含む)とエンコーダケーブルの中継ケーブル(3m/5m/10m)
を用意しています。
HA-800C ドライバ、アクチュエータ、中継ケーブルの組み合わせは、
「アクチュエータ、中継ケーブルの組み
合わせ」(P1-6)を参照してください。
2
2
*2:1.25mm は 105℃耐熱電線の場合です。HIV 線を使用する場合は 2mm 以上を推奨します。
電源の接続
本ドライバ正面の表示パネルには、下図の「電源接続用端子台」があります。それぞれの端子に次の
ように電源線を接続してください。三相電源では相順は不問です。
6
7
8
9
HA-800C-1/3/6
電源接続用端子台(TB2 用)
メーカー
型式
フェニックス・コンタクト株式会社
FKC2,5/5-ST-5.08
三相電源の場合(200V)
10
T
S
R
s
r
11
配線用遮断器
電磁接触器
HA-800C
付
T
S
NF
R
s
r
ノイズフィルタ
単相電源の場合(100V, 200V)
HA-800C
配線用遮断器
電磁接触器
NF
ノイズフィルタ
T
S
R
s
r
2-6
2-3 電源の接続
1
HA-800C-24
三相電源の場合(200V)
2
配線用遮断器
電磁接触器
HA-800C
設置・配線
R
S
NF
3
T
r
s
ノイズフィルタ
4
5
電源接続用端子台
端子名
6
ネジサイズ
圧着端子外径
R,S,T,
M4
φ8mm
r,s
M4
φ8mm
ご参考
丸型圧着端子(R 型)
3.5-R4 (日本圧着端子製造株式会社)
5.5-4NS (日本圧着端子製造株式会社)
丸型圧着端子(R 型) R1.25-4 (日本圧着端子製造株式会社)
7
8
ドライバの受電部は、突入電流抑制回路を採用しています。そのため、電源投入時の
極端な電圧降下はありませんが、電源と機器間の配線は渡り配線とせず、電源供給口
から個別に配線してください。
9
10
電源
HA-800C 他の機器
11
良い配線例
付
2-7
電源
主スイッチ
他の機器
主スイッチ
HA-800C 他の機器
悪い配線例
他の機器
2-3 電源の接続
1
電源ラインの保護
電源ラインを保護するため、電源ラインには必ずサーキットブレーカ(MCB)を使用します。
サーキットブレーカは、次表により選定してください。
電源電圧
200V
200V
200V
200V
100V
200V
200V
200V
ドライバ型式
HA-800C
-1-200
HA-800C
-1-200
HA-800C
-3-200
HA-800C
-6-100
HA-800C
-6-200
HA-800C
-6-200
HA-800C-24-200
アクチュエータ
モータ
FHA-8C
FHA-11C
FHA-14C
FHA-17C
RSF-17
HA-800C
-3-200
SHA20
SHA25
FHA-25C
RSF-20
RSF-25
RKF-20
RKF-25
MAC08
MAB09
SHA25
SHA32
FHA-32C
RSF-32
RKF-32
MAB12
SHA40
FHA-40C
MAB15
サーキット
ブレーカ(MCB)
の電流遮断容量
(A)
ドライバ 1 台あ
たり必要電源容
*1
量(kVA)
主回路電源投入
時の突入電流
*2
(A)
3
5
10
15
SHA40
MAB15
SHA58
SHA65
設置・配線
2
3
MAA
21
5
20
30
6
0.15
0.25
0.4
0.8
0.8
1.5
1.8
2.5
3.5
5.5
15
15
15
15
8
15
15
15
15
15
9
接地線の接続
10
次表の電線サイズまたはそれ以上のサイズの接地(アース)線を使用してください。
記号
接地(FG)線
接地マーク
HA-800C-1
3.5
最小許容電線サイズ(mm2)
HA-800C-3
HA-800C-6
3.5
3.5
7
8
*1: アクチュエータ許容連続出力時の値です。
*2: 周囲温度 25℃での値です。
上記の値は、標準入力電圧(AC200V、AC100V)場合です。
サーキットブレーカの遮断容量は、AC200V 三相入力、AC100V 単相入力の場合の推奨値です。
ケーブル
4
HA-800C-24
3.5、5.5
HA-800C ドライバは、下図のように 2 種類の接地(アース)端子を設けています。
接地端子には、必ず上表以上の電線を使用し、丸型圧着端子を使用して接続してください。
接地端子は必ず一つの端子に一つの電線を接続してください。
11
付
アクチュエータ用
収納箱用
2-8
2-3 電源の接続
1
「非常停止」信号等で「主回路電源投入・遮断用スイッチ」を遮断するシーケンス回路を構成してく
ださい。
設置・配線
2
電源投入・遮断シーケンス
3
電源の投入・遮断は、HA-800C ドライバの「RYn0 サーボオン」信号を OFF の状態
にしてから行ってください。
電源の投入・遮断の頻度が高くなると内部回路の突入電流制限抵抗器の劣化を招くお
それがあります。
電源の投入・遮断の頻度は、目安として 5 回/時間、30 回/日以下としてください。
また、遮断後の再投入は 30 秒以上の間隔を空けてください。
4
5
6
電源投入シーケンス、サーボオンシーケンス(HA-800C-1, -3, -6)
下図のタイミングで本ドライバ用電源を投入するよう、上位装置でシーケンスプログラムを作成
してください。下図は、17bit アブソリュートエンコーダシステムでの電源投入シーケンスを示
します。
制御電源投入後およそ 10 秒間は I/O 出力およびモニタ出力が不定となります。
7
8
9
制御回路電源
ON
OFF
主回路電源
ON
OFF
RYn0
10
サーボオン(S-ON)
10s (max)
0ms (min)
3s (typ)
*1
*1
ON
OFF
RXn0 準備完了
ON
OFF
ダイナミックブレーキ
(DB 有効、SP55=1)
無効
有効
2ms (min)
10ms (typ)
11
モータ励磁
(DB 有効、SP55=1)
付
110ms (typ)
励磁 ON
励磁 OFF
5ms (typ)
動作指令
ダイナミックブレーキ
(DB 無効、SP55=0)
モータ励磁
(DB 無効、SP55=0)
無効
有効
励磁 ON
励磁 OFF
3s (typ)
10ms (typ)
5ms (typ)
動作指令
*1:制御回路電源と主回路電源を同時に投入した場合です。制御回路電源を投入後、約 7s 以上後に主回路
電源を投入した場合は主回路電源のコンデンサが放電状態の場合で、約 3s 後にサーボ ON 可能です。
2-9
2-3 電源の接続
サーボオフシーケンス(HA-800C-1, -3, -6)
RYn0 サーボオン(S-ON)
ON
OFF
1
1ms (typ)
2
設置・配線
励磁 ON
励磁 OFF
モータ励磁
3
5ms (typ)
ダイナミックブレーキ
(DB 有効、SP55=1)
無効
有効
ダイナミックブレーキ
(DB 無効、SP55=0)
無効
有効
4
(ダイナミックブレーキ無効)
5
アラーム発生時のシーケンス(HA-800C-1, -3, -6)
RYn0 サーボオン(S-ON)
アラーム状態
6
ON
OFF
7
アラームなし
アラームあり
モータ励磁
励磁 ON
励磁 OFF
RXn0 準備完了
ON
OFF
RXn7 サーボアラーム
ON
OFF
ダイナミックブレーキ
(DB 有効、SP55=1)
無効
有効
ダイナミックブレーキ
(DB 無効、SP55=0)
無効
有効
8
0ms(Min)
9
5ms (typ)
10
(ダイナミックブレーキ無効)
11
付
2-10
2-3 電源の接続
1
電源遮断シーケンス(HA-800C-1, -3, -6)
下図のタイミングで本ドライバ用電源を遮断するよう、上位装置でシーケンスプログラムを作成
*1
してください。
ON
5s (min)
2
制御回路電源
設置・配線
主回路電源
3
RXn0 準備完了
4
0ms (min)
ON
OFF
5 minutes (max)
*2
ON
OFF
*1:制御回路電源を OFF 後、ON するには、5s 以上の時間を空けてください。
*2:
「RYn0 サーボオン(S-ON)」が OFF(サーボオフ)にて、主回路電源を OFF した場合は、
「RXn0 準
備完了」がオフする(主回路直流電圧低下)まで、最大で 5 分程度かかります。
サーボオン中(モータ励磁中)にて、主回路電源を OFF した場合は、「RXn0 準備完了」がオフする
(主回路直流電圧低下)まで、モータ励磁を継続します。回生動作等にて主回路直流電圧が低下しな
い場合には、モータ励磁 OFF するまでに長い時間がかかります。アラーム発生中を除き、サーボオ
フをしてから、主回路電源を遮断してください。
主回路電源と制御回路電源を同時に OFF した場合は、数 10ms~数 100ms でモータ励磁が OFF しま
す(電源電圧に依存して時間が変化します)。 このとき、
「RXn0 準備完了」も OFF しますが、主回
路電源のコンデンサはチャージされていますので、正面パネルの主回路チャージモニタ LED が消灯
するまで(約 15 分)は、ドライバに触れないようにしてください。
5
6
7
8
ON
OFF
電源投入、サーボオンシーケンス(HA-800C-24)
下図のタイミングで本ドライバ用電源を投入するよう、上位装置でシーケンスプログラムを作成
してください。下図は、17bit アブソリュートエンコーダシステムでの電源投入シーケンスを示
します。
制御電源投入後およそ 10 秒間は I/O 出力およびモニタ出力が不定となります。
9
制御回路電源
10
ON
OFF
10s (max)
*1
0ms (min)
主回路電源
11
付
ON
OFF
RYn0 サーボオン(S-ON)
ON
OFF
RXn0 準備完了
ON
OFF
ダイナミックブレーキ*3
無効
有効
モータ励磁
励磁 ON
(DB 有効、SP55=1*2) 励磁 OFF
3s (typ)
*1
2ms (min)
3s (typ)
110ms (typ)
5ms (typ)
動作指令
*1:制御回路電源と主回路電源を同時に投入した場合です。制御回路電源を投入後、約 7s 以上後に主回路
電源を投入した場合は主回路電源のコンデンサが放電状態の場合で、約 3s 後にサーボ ON 可能です。
*2:HA-800C-24 では、「SP55:DB 有効/無効設定」は必ず“1”(工場出荷時の初期設定)にて、ご使用
ください。
*3:ダイナミックブレーキは、主回路電源に連動して動作します。
2-11
2-3 電源の接続
1
サーボオフシーケンス(HA-800C-24)
RYn0 サーボオン(S-ON) ON
OFF
1ms (typ)
2
モータ励磁
設置・配線
励磁 ON
励磁 OFF
3
ダイナミックブレーキ
(DB 有効、SP55=1*2)
無効
有効
*3
(ダイナミックブレーキ無効 )
4
*2:HA-800C-24 では、「SP55:DB 有効/無効設定」は必ず“1”(工場出荷時の初期設定)にて、ご使用
ください。
*3:ダイナミックブレーキは、主回路電源に連動して動作します。
6
アラーム発生時のシーケンス(HA-800C-24)
RYn0 サーボオン(S-ON)
アラーム状態
ON
OFF
励磁 ON
励磁 OFF
8
2ms (typ)
ON
OFF
RXn0 準備完了
RXn7 サーボアラーム
ON
OFF
主回路電源
ON
OFF
ダイナミックブレーキ
(DB 有効、SP55=1*2)
無効
有効
主回路電源
7
アラームなし
アラームあり
モータ励磁
9
10
11
*3
(ダイナミックブレーキ無効 )
ON
OFF
*4
付
200ms (typ)
*4
ダイナミックブレーキ
(DB 有効、SP55=1*2)
5
無効
有効
*2:HA-800C-24 では、「SP55:DB 有効/無効設定」は必ず“1”(工場出荷時の初期設定)にて、ご使用
ください。
*3:ダイナミックブレーキは、主回路電源に連動して動作します。
*4:出力信号アラーム出力を利用してドライバの主回路電源を遮断することで、ダイナミックブレーキを
使用することができます。ドライバの主回路電源遮断により、主回路放電機能が働き主回路直流電圧
が低下しダイナミックブレーキが動作します。ただし、回生過熱アラーム(AL41)、過回生アラーム
(AL42)等の回生抵抗が高負荷状態である場合、または、R1-R3 ショートバーを外した場合には、放電
機能が働かず、ダイナミックブレーキが作動しないことがあります。
2-12
2-3 電源の接続
1
電源遮断シーケンス(HA-800C-24)
下図のタイミングで本ドライバ用電源を遮断するよう、上位装置でシーケンスプログラムを作成
してください。
*1
ON
5s (min)
設置・配線
2
3
制御回路電源
ON
OFF
主回路電源
ON
OFF
RXn0 準備完了
4
0ms (min)
200ms (typ)
*2
ON
OFF
*1:制御回路電源を OFF 後、ON するには、5s 以上の時間を空けてください。
*2:主回路電源を OFF した場合は、主回路放電機能により約 0.2 秒で RXn0 準備完了がオフします。ただ
し、回生抵抗過熱アラーム(AL41)、過回生アラーム(AL42)等の回生抵抗が高負荷状態である場合、
または、R1-R3 ショートバーを外した場合には、放電機能が働かず放電に約 10 分程度かかります。
サーボオン中(モータ励磁中)にて、主回路電源を OFF した場合は、RXn0 準備完了がオフする(主
回路直流電圧低下)まで、モータ励磁を継続します。回生動作等にて主回路直流電圧が低下しない場
合には、モータ励磁 OFF するまでに長い時間がかかります。アラーム発生中を除き、サーボオフをし
てから、主回路電源を遮断してください。
主回路電源と制御回路電源を同時に OFF した場合は、数 10ms~数 100ms でモータ励磁が OFF しま
す(電源電圧に依存して時間が変化します)。このとき、RXn0 準備完了も OFF しますが、主回路電源
のコンデンサはチャージされていますので、正面パネルの主回路チャージモニタ LED が消灯するまで
は、ドライバに触れないようにしてください。
5
6
7
※HA-800C-24 は、主回路放電機能が働き、主回路電源 OFF 後 0.5 秒(Max)程度で、主回路チャー
ジモニタ LED が消灯しますが、回生抵抗過熱アラーム(AL41)、過回生アラーム(AL42)等の回
生抵抗が高負荷状態である場合、または、R1-R3 ショートバーを外した場合は、約 10 分程度の時
間は消灯しません。
8
9
10
11
付
2-13
2-4 ノイズ対策
2-4
1
ノイズ対策
接地処理
HA-800C
電源入力
三相
サージ
アブソ
ーバ
電磁接
触器
ノイズ
フィルタ
*1
U
V
W
E
R
S
T
r
s
2
CN1
3
4
5
下図を参考に、システム機器全部の接地(アース)処理を行ってください。
配線用
遮断器
2
設置・配線
本ドライバの主回路では、パワー素子(IPM)を PWM 制御で使用しています。この素子がスイッチン
グするときの急激な電流・電圧変化により、スイッチングノイズが発生します。配線処理やアースの
取りかたが悪い場合、他の外部機器の誤動作やラジオ障害を生じる場合があります。
また、本ドライバには CPU 等の電子回路を内蔵しておりますので、外来ノイズ侵入による誤動作を極
力防止するような配線や処理をしてください。
これらのノイズによるトラブルを未然に防止するため、次に示すような配線、接地処理を確実に行っ
てください。
6
HD
M
7
E
CN2,4
3.5mm 以上の電線
8
・操作リレーシーケンス等
・お客様信号発生回路
3.5mm2 以上
大地アース
(1 点接地のこと)
2
3.5mm 以上の電線
9
*1: ラインフィルタの接地について、「ノイズフィルタの設置」P2-15を参考にしてください。
10
モータフレーム接地
アクチュエータがフレームを通して機械側で接地(アース)されている場合、ドライバのパワー
部からモータ浮遊容量(Cf)を介して電流が流れます。この電流による影響を防止するためアク
チュエータの接地端子(モータフレーム)は、必ずドライバの接地(アース)端子に接続し、ド
ライバの接地(アース)端子を直接アースに接地してください。
11
付
配線管の接地
モータ配線が金属コンジットや金属ボックスに入っている場合、金属部を必ず接地してください。
なお、接地処理はすべて 1 点接地としてください。
2-14
2-4 ノイズ対策
1
設置・配線
2
3
4
5
6
7
8
ノイズフィルタの設置
電源ラインから侵入するインパルスノイズによる誤動作の防止およびドライバ内部発生ノイズのライ
ンへの放出を制限するために、ノイズフィルタの使用を推奨します。
ドライバを複数使用する場合は、ノイズフィルタは各ドライバに入れてください。
ノイズフィルタは、侵入ノイズおよび発生ノイズの両方に効果がある、双方向性のものを選定してく
ださい。
下記のノイズフィルタを推奨します。
型式
定格仕様
RF3020-DLC
定格電圧:Line-Line 440 to 550 V、定格電流:20A
RF3030-DLC
RF3040-DLC
HF3010A-UN
HF3030A-UN
HF3040A-UN
SUP-P5H-EPR
SUP-P10H-EPR
3SUP-H5H-ER-4
3SUP-H10H-ER-4
定格電圧:Line-Line 440 to 550 V、定格電流:30A
定格電圧:Line-Line 440 to 550 V、定格電流:40A
定格電圧:250VAC、定格電流:10A
定格電圧:250VAC、定格電流:30A
定格電圧:250VAC、定格電流:40A
定格電圧:250VAC、定格電流:5A
定格電圧:250VAC、定格電流:10A
定格電圧:250VAC、定格電流:5A
定格電圧:250VAC、定格電流:10A
メーカー
RASMI ELECTONICS LTD
双信電機株式会社
岡谷電機産業株式会社
上表のノイズフィルタとトロイダルコアをドライバ電源入力部へ接続し、EMC 指令の適合性確認試験
を実施しています。
EC 指令への対応に関しては、本技術資料の P17をご参照ください。
9
10
11
付
2-15
2-4 ノイズ対策
1
•
ノイズフィルタの入る側の電線と出
る側の電線とは、空間的に分離してく
ださい。同じパイプ・ダクトに入れた
り、結束したりしないでください。
収納箱内接地
•
接地(アース)線をフィルタの出る側
の線と同じパイプ・ダクトに入れたり、
結束しないでください。
入る側の線の接近
はかまわない
収納箱内接地
•
接地(アース)線は、渡り線としない
で、機器それぞれを単独に収納箱また
はアース板の 1 点に接続してください。
4
フィルタ
5
Ground in
収納箱内接地
フィルタ
×
フィルタ
フィルタ
E
シールド
収納箱内接地
7
収納箱内接地
○
E
6
×
○
フィルタ
3
×
○
フィルタ
2
設置・配線
ノイズフィルタと本ドライバは、できるだけ近距離に配置してください。
本ドライバ以外の電気機器の電源線にも、同様にノイズフィルタを設置してください。
特に、電気溶接機・放電加工機などの高周波発生源には、必ずノイズフィルタを設置
してください。
ノイズフィルタを設置する場合、その方法によっては効果が半減します。次の注意点
を参考に設置してください。
E
8
9
10
E
シールド
収納箱内接地
電磁リレー、電磁接触器(コンタクタ)
、ソレノイドなどのコイルにサージ吸収回路を
必ず挿入してください。
速度信号などアナログ入力信号の配線では、終端が開放(オープン)とならないよう
にしてください。
本ドライバは産業用機器であり、ラジオ障害対策は施していません。
以下のような環境で使用する場合は、電源線の入力にラインフィルタを入れてくださ
い。
• 民家の近くで使用する場合
• ラジオ障害が問題となる場合
2-16
11
付
2-5 ドライバ・モータ間の配線
1
設置・配線
2
3
4
5
6
2-5
ドライバ・モータ間の配線
本ドライバとモータ間の配線について説明します。
モータとの接続
モータとの接続は、下図のように TB1 コネクタの「U,V,W」端子と接続します。
あらかじめモータケーブル線の相順をアクチュエータの技術資料で確認しておき、お互いに記号の同
じ端子を接続してください。相順違いや欠相がある場合、アラーム等は出ませんのでご注意ください。
なお、オプションのモータ用中継ケーブルの黄、青線は、ブレーキ付アクチュエータでのブレーキ解
除用電源(DC24V、極性無し)を接続するものです。ブレーキなしアクチュエータの場合、接続する必
要はありません。
[HA-800C-1/-3/-6]
U
V
W
R2
R3
R1
7
TB1
U
赤
V
白
黒
W
回生抵抗
R3
R1
HA-800C-3/6 にて内蔵回生抵抗を使用する場合、R1,R3 をショートしてくださ
い。
(当社製の中継ケーブルでは、ショートバーにてショートしています)
外付けの回生抵抗を使用する場合は、R1,R3 をオープンにして、R1,R2 間に回生
抵抗を接続してください。
モータ接続用端子台(TB1 用)
メーカー
フェニックス・コンタクト株式会社
FKIC2.5/6-ST-5.08
型式
10
AC サーボアクチュエータ
R2
8
9
M
[HA-800C-24]
11
TB
R3
HA-800C-24 にて内蔵回生抵抗を使用する場合、R1,R3 をショートしてくださ
い。
(当社出荷時は、ショートバーにてショートしています)
外付けの回生抵抗を使用する場合は、R1,R3 をオープンにして、R1,R2 間に回
生抵抗を接続してください。外付け回生抵抗を使用しない場合は、ショートバ
ーはオープンにしないでください。オープンにすると、主回路放電機能が動作
しません。
R1
付
R2
U
V
W
回生抵抗
赤
白
黒
M
AC サーボアクチュエータ
モータ接続用端子台
ネジサイズ
M4
圧着端子外径
φ8mm
丸型圧着端子(R 型)
ご参考
3.5-R4 (日本圧着端子製造株式会社)
5.5-4NS (日本圧着端子製造株式会社)
モータケーブルの相順を間違えたり、運転中に配線の切断や接続を行うと、暴走する
可能性があります。
警
2-17
告
2-5 ドライバ・モータ間の配線
1
エンコーダとの接続
お客様準備の場合
配線の長さ:10m 以下
電線の導体抵抗:0.04Ω/m 以下
当社オプション
3m/5m/10m ケーブルを準備しています。
5
エンコーダ
6
エンコーダ用コネクタ(CN1)
コネクタ
3M
10114-3000PE
メーカー
型式
カバー
3M
10314-52F0-008
7
8
エンコーダ用コネクタ(CN1)のピン配列
下図のピン配列は、はんだ付け側から見ています。
4 本省線インクリメンタルエンコーダ
6
NC
7
SD
4
NC
5
SD
13
NC
14
NC
3
NC
12
NC
6
CLR
1
+5V
7
SD
4
BAT-
5
SD
8
0V
13
NC
14
NC
11
NC
12
NC
14
NC
2
BAT+
3
NC
11
NC
12
NC
1
+5V
10
8
0V
11
9
NC
10
NC
14 本線インクリメンタルエンコーダ
1
+5V
7
A
8
0V
14
W
9
NC
10
NC
5
SD
6
Z
2
BAT+
3
NC
4
BAT-
13
NC
17bit アブソリュートエンコーダ*
6
NC
7
SD
9
NC
10
NC
9
13bit アブソリュートエンコーダ
2
NC
11
NC
3
4
CN1
E
2
設置・配線
エンコーダとの接続は、下図のように CN1 コネクタと接続します。
エンコーダ信号線には、必要芯数のツイストペアシールドケーブルを使用し、電線サイズが 0.3mm2
以上のものを使用してください。
また、配線の長さはできるだけ短くしてください。
4
B
5
A
13
W
3
Z
11
V
12
V
付
2
B
1
+5V
9
U
10
U
8
0V
(*:17bit エンコーダインクリメンタル仕様では、BAT+/BAT-を接続する必要はありません。)
NC 端子は一切接続しないでください。誤って接続すると故障の原因となることがあり
ます。
2-18
2-6 上位機器との配線
1
設置・配線
2
3
4
2-6
上位機器との配線
本ドライバと上位機器間の配線について説明します。
上位機器との接続(入出力信号)
上位機器との接続は、下図のように CN2 コネクタと接続します。
入出力信号線には、必要芯数のツイストペアシールドケーブルまたはツイストペア一括シールド線で、
電線サイズが 0.2mm2 のもの(AWG24)を使用してください。
CN2
5
上位機器
6
7
8
9
入出力信号用コネクタ(CN2)
メーカー
型式
コネクタ
3M
10120-3000PE
カバー
3M
10320-52F0-008
入出力信号用コネクタ(CN2)のピン配列
下図のピン配列は、はんだ付け側から見ています
10
10
ORGEND
4
2
ERR- E-STOP
CLR
9
7
5
3
1
ALM
OUT- ORG ALMINCOM
CLR
COM
20
18
16
14
12
FG
MON- MON- MON- OUTCOM
Z+
B+
A+
19
17
15
13
11
MON- MON- MON- MON- Z(OC)
ZBAGND
11
付
8
Ready
6
INCOM
入出力信号線の長さは 3m 以下にしてください。
パワー線(電源線、モータ線などの強電回路)と入出力信号線とは 30cm 以上離して
配線し、同じパイプやダクトの中を通したり、一緒に結束(バインド)したりしない
でください。
特に速度信号などアナログ入力信号の配線では、終端が開放(オープン)とならない
ようにしてください。
2-19
2-6 上位機器との配線
1
CC-Linkコネクタの接続
HA-800C の CC-Link コネクタを 2 段に変換するためのアダプタ(35715-L010-B00 AK 3M)を接続し、
専用コネクタ(35505-6000-BOM GF 3M)を接続します。
設置・配線
CC-Link コネクタ
アダプタ
3
CN4
4
1(DA)
2(DB)
3(DG)
4(SLD)
5(FG)
35505-6000-BOM GF(3M)
2
5
6
35715-L010-B00 AK(3M)
7
8
9
10
11
付
2-20
2-6 上位機器との配線
1
設置・配線
2
3
4
5
6
7
パソコンとの接続(PSF-800)
パソコンとの接続は、専用の通信ケーブルを使用してください。専用ケーブルを使用しない場合は下
記を参照し作成してください。
専用通信ケーブル:EWA-RS03(別売品)
ケーブル長:1.6m
PSF-800 用通信コネクタ(CN3)
メーカー
コネクタ
ヒロセ電機株式会社
型式
TM11P-66P(53)
パソコン側コネクタ(D-sub 9 ピンメス)
メーカー
型式
ソケット
オムロン株式会社
XM2D-0901
フード
オムロン株式会社
XM2S-0913
ジャックスクリュー
オムロン株式会社
XM2Z-0073
PSF-800 用通信コネクタ(CN3)のピン配列
ドライバ側
Pin No.
記号
TxD
1
GND
2
NC
3
NC
4
GND
5
RxD
6
8
9
10
パソコン側
Pin No.
記号
1
2
TxD
3
RxD
4
5
GND
6
7
8
9
-
NC(3 ピン、4 ピン)には配線をしないでください。
※HA-800C でのパソコンとの通信は、1 対 1 接続のみです。
11
付
2-21
第
3章
立ち上げ
ここでは、はじめてドライバをご使用されるに当たっての、物品の確認から実装置の運
転までの立ち上げ手順を説明します。
3-1
3-2
3-3
3-4
3-5
3-6
立ち上げ手順 ···································································· 3-1
初めて電源を投入する ························································ 3-2
アクチュエータ単体で動作確認 ············································ 3-8
実装置での運転確認 ························································· 3-12
手動によるゲインの調整方法 ············································· 3-14
本運転にあたって ···························································· 3-21
3-1 立ち上げ手順
1
2
3-1
ここでは、本ドライバを立ち上げる手順について説明します。
立ち上げ
3
警
4
告
5
・正しくすべての配線は行われているか
・仮配線の状態はないか
・端子にゆるみはないか
・接地(アース)は完全か
7
注
8
意
(2)機器の周りを整頓してください。特に電線の切れ端、工具などが
装置の内部に残っていないか、十分に点検してください。
(3)2 人以上で作業している場合は、電源投入以前に作業打ち合わせ
の上、お互いの安全に心がけてください。
(4)電源のオン/オフでの運転はできません。
・電源のオン/オフを頻繁に行うと内部回路素子の劣化を招きます。
・アクチュエータの運転/停止は、指令信号で行ってください。
9
11
配線作業を行う前に工場電源を遮断してください。工場電源を装置に投
入した後には、配線作業を絶対に行わないでください。感電する危険が
あります。
(1)電源投入前に、再度、配線のチェックし、不具合点を改善してく
ださい。
6
10
立ち上げ手順
立ち上げ手順
主な立ち上げ手順は以下のようになります。
初めて電源投入する場合の確認
参考:
「初めて電源を投入する」
(P3-2)
付
アクチュエータ単体で実際の
制御モードで動作確認
実機装置での運転確認
本運転にあたって
3-1
参考:
「アクチュエータ単体で動作確認」(P3-8)
参考:
「実装置での運転確認」(P3-12)
参考:
「本運転にあたって」(P3-21)
3-2 初めて電源を投入する
3-2
1
初めて電源を投入する
2
ここでは、初めて電源を投入する場合の立ち上げ手順について説明します。
意
物品の確認
設置場所の確認
ドライバとアクチュエータの組み合わせが正し
いかドライバ右側面の銘板で確認します。
参考:
「品物の確認」(P2-1)
ドライバの設置環境を確認します。
参考:
「設置場所と設置工事」(P2-2)
電源線、モータ線、エンコーダ線と入出力信号線
の配線を確認します。
参考:
「電源の接続」(P2-5)
制御電源の投入
制御電源を投入します。
アクチュエータ搭載エンコーダによってドライ
バの LED 表示シーケンスが異なります。
アクチュエータ搭載エンコーダによってドライ
バの LED 表示シーケンスが異なります。
アブソリュートエンコーダの場合は、AL53 や
AL81 が発生するので、まず「T08:多回転クリア」
を実行して、一旦制御電源 OFF→ON して電源再
立上げしてください。
参考:
「制御電源投入時の詳細」
(P3-3、3-4)
アクチュエータ単体での
テストモードによる JOG 運転
4
5
6
7
配線の確認
主電源の投入
3
立ち上げ
注
(1)本運転を行う前に、必ず試運転を実施してください。
(2)試運転にあたっては、まず機械・装置からアクチュエータを切り
離し、アクチュエータ単独で(無負荷状態で)運転してください。
主電源を投入します。
JOG 運転による回転動作により電源、モータ、エ
ンコーダの配線が正常であることを確認します。
参考:
「9章テストモード」
(RYn0 サーボ ON 指令の入力によりアクチュエ
ータがサーボオンしている場合には「JOG 動作」
に入ることが出来ません。RYn0 サーボ ON 指令
は 0 にしてください。)
注意:JOG 動作は、非常停止信号以外の入力信号
に関係なくアクチュエータを動作させることが
出来ます。JOG 動作中は非常停止信号以外の入力
信号を操作しても、無視されます。
3-2
8
9
10
11
付
3-2 初めて電源を投入する
1
2
立ち上げ
3
4
制御電源の投入時の詳細
接続するアクチュエータにより、電源投入時のドライバ内部処理シーケンスが異なります。
(1)17bit アブソリュートエンコーダ(17bit エンコーダインクリメンタル仕様)(SHA シリーズ、
FHA-Cmini シリーズ)(P3-3)
(2)13bit アブソリュートエンコーダ(FHA-C シリーズ)の組み合わせ(P3-4)
(3)4 本省線インクリメンタルエンコーダ(FHA-Cmini シリーズ)の組み合わせ(P3-5)
(4)4 本省線インクリメンタルエンコーダ(FHA-C シリーズ)または 14 本線式インクリメンタル
エンコーダの組み合わせ(P3-6)
(1)17bit アブソリュートエンコーダ(SHA シリーズ、FHA-Cmini シリーズ)の組み合わせ
5
1
制御回路電源を投入します。
ドライバとアクチュエータの組み合わせチェックとアブソリュートエンコーダの電源電圧と多
回転データチェックを行います。
6
正常時
異常時
7
8
MODE
9
2
付
DOWN
SET
状態表示モードが表示されます。
工場出荷時はモータ回転速度が表示されます。
10
11
UP
複数のアラームやワーニング(警告)が発生した時は順次内容が表示されます。
アクチュエータの組み合わせが不一致の場合
右図のように、「UA99:接続アクチュエータ違い」が表示さ
れます。
対策
ドライバの右側面の銘板に組み合わせアクチュエータが記
載されています。
制御回路電源を遮断し、正しいアクチュエータを接続します。
接続後、再度電源投入し、正常に立ち上がることを確認して
ください。
MODE
UP
MODE
UP
DOWN
SET
アブソリュート多回転データ異常の場合
初回の電源投入時やアクチュエータをドライバと長時間(約
30 分以上)接続していなかった場合に発生します。
左図のように、「AL81:システムダウン」が発生します。
対策
多回転クリアを実行してください。多回転クリア実行後、本
ドライバの電源を再投入してください。
多回転カウンタのクリア方法は、
「T08:多回転クリア」
(P9-9)
を参照してください。
3-3
DOWN
SET
3-2 初めて電源を投入する
1
(2)13bit アブソリュートエンコーダ(FHA-C シリーズ)の組み合わせ
1
2
制御回路電源を投入します。
アブソリュートエンコーダの電源電圧と多回転データチェックを行います。
正常時
3
異常時
立ち上げ
4
MODE
2
UP
DOWN
5
SET
状態表示モードが表示されます。
6
工場出荷時はモータ回転速度が表示されます。
7
複数のアラームやワーニング(警告)が発生した時は順次内容が表示されます。
アブソリュート多回転データ異常の場合
初回の電源投入時やアクチュエータをドライバと長時間(約
30 分以上)接続していなかった場合に発生します。
左図のように、「AL53:システムダウン」が発生します。
対策
多回転クリアを実行してください。多回転クリア実行後、本
ドライバの電源を再投入してください。
多回転カウンタのクリア方法は、
「T08:多回転クリア」
(P9-9)
を参照してください。
8
MODE
UP
DOWN
SET
9
10
11
付
3-4
3-2 初めて電源を投入する
1
(3)4 本省線インクリメンタルエンコーダ(FHA-Cmini シリーズ)の組み合わせ
1
2
制御回路電源を投入します。
ドライバとアクチュエータの組み合わせチェックを行います。
正常時
異常時
立ち上げ
3
4
MODE
5
2
UP
DOWN
SET
状態表示モードが表示されます。
工場出荷時はモータ回転速度が表示されます。
6
複数のアラームやワーニング(警告)が発生した時は順次内容が表示されます。
7
8
9
アクチュエータの組み合わせが不一致の場合
「UA99:接続アクチュエータ違い」が表示されます。
対策
ドライバの右側面の銘板に組み合わせアクチュエータが記
載されています。
制御回路電源を遮断し、正しいアクチュエータを接続します。
接続後、再度電源投入し、正常に立ち上がることを確認して
ください。
10
11
付
3-5
MODE
UP
DOWN
SET
3-2 初めて電源を投入する
(4)4 本省線インクリメンタルエンコーダ(FHA-C シリーズ)または 14 本線式イ
ンクリメンタルエンコーダの組み合わせ
1
2
制御回路電源を投入します。
正常時
1
異常時
立ち上げ
3
4
MODE
2
UP
DOWN
SET
5
状態表示モードが表示されます。
工場出荷時はモータ回転速度が表示されます。
6
複数のアラームやワーニング(警告)が発生した時は順次内容が表示されます。
配線不良・誤配線
7
A 相、B 相、Z 相信号、U 相、V 相、W 相および電源の配線
に問題がある場合は、「AL50:エンコーダ断線」が発生しま
す。
8
MODE
UP
DOWN
SET
9
配線不良・誤配線
エンコーダの U 相、V 相、W 相信号および電源の配線に問題
がある場合は、「AL52:UVW 異常」が発生します。
10
MODE
UP
DOWN
SET
11
付
3-6
3-2 初めて電源を投入する
1
2
電源の投入時のトラブルシューティング
操作内容
電源投入
不具合内容
LED が点灯しない
立ち上げ
3
4
5
6
アラームが発生
AL53、AL81 が発生
JOG 運転
回転しない
回転方向が逆
アラームが発生
確認事項
CN1 のコネクタを抜くと改善
推定原因
電源電圧不足か電源接続不良
ドライバ不良
CN2 のコネクタを抜くと改善
電源電圧不足か電源接続不良
ドライバ不良
CN1,CN2 のコネクタと配線を 電源電圧不足か電源接続不良
外しても改善しない
ドライバ不良
11 章トラブルシューティングを参照してください。
多回転クリアを実施して電源を再投入してください。
モータ線が正しく接続されて モータ線の接続不良
いるか
11 章トラブルシューティングを参照してください。
参照
P 2-5
11章
P9-9
P2-17
11章
*: RYn0 サーボ ON 指令の入力によりアクチュエータがサーボオンしている場合には「JOG 動作」に入ること
が出来ません。RYn0 サーボ ON 指令は 0 にしてください。
7
8
9
10
11
付
3-7
3-3 アクチュエータ単体で動作確認
3-3
1
アクチュエータ単体で動作確認
2
ここでは、装置に組み付ける前の、アクチュエータ単体での動作確認手順について説明します。
意
入力信号の論理設定
出力信号の論理設定
機能拡張モード設定
テストモードによる入出力の
配線、論理確認
上位コントローラからの運転
入力信号を使用する場合は、必要に応じて論理の
設定を行います。デフォルトはノーマルオープン
に設定されています。非常停止入力を使用する場
合は必ずノーマルクローズに変更してください。
参考:
「SP62:入力信号論理設定」(P8-6)
出力信号を使用する場合は、必要に応じて論理の
設定を行います。
参考:
「SP63:出力信号論理設定」(P8-7)
必要に応じてドライバの機能設定変更を行いま
す。
動作に大きく影響するパラメータの設定を確認
してください。
参考:
「8章システムパラメータモード」
テストモードにより上位からのドライバ入力信
号の配線確認、およびドライバの出力と上位号配
線と論理確認を行います。
参考:
「9章テストモード」
上位コントローラより実際の動作指令にしたが
い実運転動作を行います。
参考:
「13章 CC-Link 通信機能」
3-8
3
立ち上げ
注
(1) 本運転を行う前に、必ず試運転を実施してください。
(2) 試運転にあたっては、まず機械・装置からアクチュエータを切り離し、アクチ
ュエータ単独で(無負荷状態で)運転してください。
4
5
6
7
8
9
10
11
付
3-3 アクチュエータ単体で動作確認
1
2
立ち上げ
3
4
5
6
動作確認時のトラブルシューティング
位置制御モードの場合
操作
サーボ
オン入
力時
アラームが発生
動作命令 アクチュエータ
出力
が回転しない
(RYn1:
起動=1)
7
8
9
不具合内容
サーボロックし
ない。
一方向しか回転
しない
確認事項
推定原因
モータ線が正しく接続され モータ線の接続不良
ているか
運転準備完了になっている RYn0 サーボオン指令が入っていない
か
ワーニング 93 が発生して 主回路電圧が入力されていない、または、
いるか
ワーニング 93 閾値より低い
11 章トラブルシューティングを参照してください。
モータ線が正しく接続され モータ線の UVW 接続間違い
ているか
RYn4:正転ストロークエン 正転ストロークエンド・逆転ストロークエ
ドか、RYn5:逆転ストロー ンドが有効になっています
クエンドが 0 になっていな
いか
配線の確認
配線ミス
RYn4:正転ストロークエン 回転しない方向のストロークエンドが、有
ドか、RYn5:逆転ストロー 効になっている
クエンドが 0 になっていな
いか
配線の確認
配線ミス
配線の確認
配線ミス
指令プログラムの確認
動作プログラムの設定ミス
参照
P2-17
P13-1
9
P2-5
11章
P2-17
P13-1
9
P2-17
P13-1
9
P2-17
P2-17
P13-1
9
アラームが発生
11 章トラブルシューティングを参照してください。
11章
*1:アクチュエータの種類により回転の極性が異なります。アクチュエータの技術資料をご確認ください。
回転方向*1 が逆
10
11
付
3-9
3-3 アクチュエータ単体で動作確認
1
速度制御モードの場合
操作
サーボ
オン入
力時
不具合内容
サーボロックし
ない。
RY(n+2) アクチュエータ
3:速度制 が回転しない
御切り替
え=1
回転方向*1 が逆
推定原因
モータ線の接続不良
参照
P2-17
運転準備完了になっている RYn0 サーボオン指令が入っていない
P13-1
9
か
ワーニング 93 が発生して 主回路電圧が入力されていない、または、
P2-5
いるか
ワーニング 93 閾値より低い
11 章トラブルシューティングを参照してください。
11章
モータ線が正しく接続され モータ線の UVW 接続間違い
ているか
P2-17
RYn4:正転ストロークエン
ドか、RYn5:逆転ストロー
クエンドが 0 になっていな
いか
速度指令値が 0
速度指令値が正しく入力さ
れているか
正転ストロークエンド・逆転ストロークエ
ンドが有効になっています
RWwn+4:速度指令の設定値を確認
RWwn+4:速度指令の設定値が逆になって
いる
2
3
立ち上げ
アラームが発生
確認事項
モータ線が正しく接続され
ているか
4
5
P13-1
9
6
P2-17
7
アラームが発生
11 章トラブルシューティングを参照してください。
11章
*1:アクチュエータの種類により回転の極性が異なります。アクチュエータの技術資料をご確認ください。
8
9
10
11
付
3-10
3-3 アクチュエータ単体で動作確認
1
2
トルク制御モードの場合
操作
サーボ
オン入
力時
不具合内容
モータ励磁しな
い。
確認事項
モータ線が正しく接続され
ているか
アラームが発生
運転準備完了になっている RYn0 サーボオン指令が入っていない
P13-1
9
か
ワーニング 93 が発生して 主回路電圧が入力されていない、または、
P2-5
いるか
ワーニング 93 閾値より低い
11 章トラブルシューティングを参照してください。
11章
立ち上げ
3
4
5
RY(n+2)4 アクチュエータ
: ト ル ク が回転しない
制御切り
替え=1
6
7
回転方向*1 が逆
モータ線が正しく接続され
ているか
内部トルク指令値と設定が
正しく設定されているか
RYn4:正転ストロークエン
ド、RYn5:逆転ストローク
エンドが 0 になっていない
か
トルク指令値が正しく入力
されているか
推定原因
モータ線の接続不良
モータ線の UVW 接続間違い
参照
P2-17
P2-17
RWwn+5:トルク指令の設定値がアクチュ
エータの起動トルクより小さい
正転ストロークエンド、逆転ストロークエ
ンドが有効になっている
P13-1
9
RWwn+5:トルク指令の設定値の極性が逆
になっている
P2-17
アラームが発生
11 章トラブルシューティングを参照してください。
11章
*1:アクチュエータの種類により回転の極性が異なります。アクチュエータの技術資料をご確認ください。
8
9
10
11
付
3-11
3-4 実装置での運転確認
3-4
1
実装置での運転確認
2
ここでは、使用する装置にモータを組み付けた状態での運転確認手順について説明します。
告
実機装置に組込
テストモードによる
オートチューニング
手動によるゲイン調整
アブソリュートエンコーダ
での原点位置設定
上位コントローラからの運転
最終的に使用する状態に装置を組み込みます。
テストモードのオフラインによるオートチュー
ニングにより適正なゲインに設定します。
参考:
「9章テストモード」
上位コントローラから運転指令を与えて機械の
動きを確認します。機械の動きをさらにシビアに
する必要がある場合に手動によりゲイン調整を
行います。
参考:
「手動によるゲイン調整」
(P3-14)
アブソリュートエンコーダの搭載機種のみ処理
が必要となります。
参考:
「原点セット」(P4-8、4-16)
上位コントローラより実際の動作指令にしたが
い実運転動作を行います。
参考:
「5章入出力信号」
、
「13章 CC-Link 通信機能」
停止
3-12
3
立ち上げ
警
本製品を、人命にかかわるような設備および重大な損失の発生が予測される設備への
適用に際しては、破壊によって出力が制御不能になっても、事故にならないよう安全
装置を設置してください。
4
5
6
7
8
9
10
11
付
3-4 実装置での運転確認
1
2
操作
オートチ
ューニン
グ時
立ち上げ
3
実運転確認時のトラブルシューティング
4
5
不具合内容
チューニングし
ても激しい振動
が収まらない
アラームが発生
手動によ
るゲイン
調整時
6
ゲイン調整して
も振動が収まら
ない
アラームが発生
7
8
9
10
11
付
3-13
確認事項
立ち上がり、立ち下がり時間
が短すぎないか
負荷慣性が大きすぎないか
負荷変動がないか
推定原因
上位コントローラの設定ミス
アクチュエータの選定ミス
回転位置によって負荷が変動する場
合は、オートチューニングが正確に
できません。手動によるゲイン調整
を行ってください。
11 章トラブルシューティングを参照してください。
サーボゲインの設定値を確認
サーボゲインの設定ミス
立ち上がり、立ち下がり時間
が短すぎないか
負荷慣性が大きすぎないか
上位コントローラの設定ミス
参照
P9-13
11章
P3-14
アクチュエータの選定ミス
11 章トラブルシューティングを参照してください。
11章
3-5 手動によるゲインの調整方法
3-5
1
手動によるゲインの調整方法
3
4
位置制御の場合
5
位置制御時のブロック図を以下に示します。
HA-800 ドライバ
CC-Link
位置命令
2
立ち上げ
オートチューニングでは満足する調整ができなかった場合、各種パラメータによるマニュアル調整が
行えます。
サーボゲインをマニュアル調整するには、各サーボゲインを一つずつ調整します。応答特性は、HA-800
ドライバ用モニタソフト PSF-800 の波形モニタで確認します。CN9 モニタ出力の波形は測定器を準
備し観察してください。
負荷機械装置
6
位置制御部
速度制御部
パワー部
アクチュエータ
7
位置ループ
8
速度フィードバック
位置フィードバック
エンコーダ
9
パラメータ
位置制御のゲイン調整に使用するパラメータは次の通りです。
パラメータ No.
内容
初期値
AJ00
*1
位置ループゲイン
AJ01
*1
速度ループゲイン
AJ02
*1
速度ループ積分補償
*1: 初期値は適用アクチュエータごとに異なります。
「付録:出荷時設定」(付-1)の対象となる適用アクチュエ
ータの値を参照ください。
調整手順
1
2
3
4
5
6
オートチューニングにより、大まかな調整を行います。「T09:オートチューニング」(P9-10)
を参照してください。
位置ループゲイン(AJ00)を小さめに、速度ループ積分補償(AJ02)を大きめに設定します。
速度ループゲイン(AJ01)を、機械が振動したり異音がしない範囲で大きくしていき、振動や
異音が発生したら少し戻します。
速度ループ積分補償(AJ02)を、機械が振動したり異音がしない範囲で小さくしていき、振動や
異音が発生したら少し戻します。
位置ループゲイン(AJ00)を大きくしていき、振動が発生したら少し戻します。
位置決め整定や機械動作の状況を観測しながら、上記ゲインを微調整します。
3-14
10
11
付
3-5 手動によるゲインの調整方法
1
2
調整内容
速度ループゲイン(AJ01)
速度ループの応答性を決めるパラメータです。
この値を大きく設定すると応答性は高くなりますが、大きくしすぎると機械系が振動しやすくな
ります。逆に速度ループの応答性が低いと、振動は無いが応答が悪くなる可能性があります。さ
らに、速度ループの応答性が低すぎると、外側の位置ループにとって遅れ要素となるため、オー
バシュートが発生したり、速度指令が振動気味になる事があります。
立ち上げ
3
速度ループ積分補償(AJ02)
5
位置ループゲイン(AJ00)
4
負荷変動時の速度変動の影響を少なくするため、速度ループには積分補償があります。この積分
補償が大きいと、負荷変動時に応答が遅くなります。小さいと、負荷変動時に速度の応答性が良
くなりますが、小さ過ぎると振動的になりますので、ある程度の大きさが必要です。
位置ループゲインを高くすると、応答性の良い制御ができ、位置決め時間が短縮できます。
しかし、高過ぎると、オーバーシュートが生じたり、その行き過ぎ量を補正するため今度は高速
で逆転し、これらの動作を繰り返す、振動状態になります。
逆に位置ループゲインが低く過ぎると、応答性の悪い制御となります。
6
7
速度制御の場合
速度制御時のブロック図を以下に示します。
8
9
HA-800 ドライバ
RY(n+2)3:速度制御
切り替え
RWwn+4:速度指令
速度制御部
負荷機械装置
パワー部
10
アクチュエータ
速度ループ
速度フィードバック
11
エンコーダ
付
パラメータ
速度制御のゲイン調整に使用するパラメータは次の通りです。
パラメータ No.
AJ01
AJ02
内容
速度ループゲイン
速度ループ積分補償
初期値
*1
*1
*1:初期値は適用アクチュエータごとに異なります。
調整手順
1
2
3-15
オートチューニングにより、大まかな調整を行います。T09:オートチューニング(P9-10)を
参照してください。
速度ループ積分補償(AJ02)を大きめに設定します。
3-5 手動によるゲインの調整方法
3
4
5
速度ループゲイン(AJ01)を、機械が振動したり異音がしない範囲で大きくしていき、振動や
異音が発生したら少し戻します。
速度ループ積分補償(AJ02)を、機械が振動したり異音がしない範囲で小さくしていき、振動
や異音が発生したら少し戻します。
速度制御の機械動作の状況を観測しながら、上記ゲインを微調整します。
1
2
調整内容
速度ループゲイン(AJ01)
速度ループの応答性を決めるパラメータです。
この値を大きく設定すると応答性は高くなりますが、大きくしすぎると機械系が振動しやすくな
ります。逆に速度ループの応答性が低いと、振動は無いが応答が悪くなる可能性があります。さ
らに、速度ループの応答性が低すぎると、外側の位置ループにとって遅れ要素となるため、オー
バシュートが発生したり、速度指令が振動気味になる事があります。
速度ループ積分補償(AJ02)
負荷変動時の速度変動の影響を少なくするため、速度ループには積分補償があります。この積分
補償が大きいと、負荷変動時に応答が遅くなります。小さいと、負荷変動時に速度の応答性が良
くなりますが、小さ過ぎると振動的になりますので、ある程度の大きさが必要です。
立ち上げ
3
4
5
6
7
8
9
10
11
付
3-16
3-5 手動によるゲインの調整方法
1
2
立ち上げ
3
4
5
6
7
8
9
サーボゲインの応用調整機能
応用調整機能についてフィードフォワード制御機能の調整ができます。通常はまず、上記の手動ゲイ
ン調整「位置制御の場合」
(P3-14)の調整方法で調整をおこなってください。この調整で満足できな
い場合に、応用調整機能を調整してください。
フィードフォワード制御機能とは、位置指令から動作に必要な速度指令/トルク指令を計算・加算する
ことで、フィードバック制御のみと比べ、偏差パルスを小さくでき、応答性を向上させることが可能
です。
フィードフォワード制御機能は、位置制御時のみ有効です。速度制御やトルク制御時には作用しませ
ん。
「SP69:フィードフォワード制御機能設定」によって、フィードフォワード制御とフィードフォワー
ド制御簡易調整版を選択することができます。フィードフォワード制御簡易調整版は、従来のフィー
ドフォワード制御(関連パラメータ:5 個)に比べ、少ない設定パラメータ(関連パラメータ:2 個)
で同程度の制御性能を実現できる機能です。
SP69:フィードフォワード制御機能設定
設定値
○:AJxx の設定が影響する
機能
AJ03
○
×:AJxx の設定が影響しない
関連パラメータ
AJ20 AJ21 AJ22 AJ23
○
○
○
○
0
フィードフォワード制御(従来互換機能)
1
フィードフォワード制御
○
○
○
○
○
2
フィードフォワード制御簡易調整版(安定動作モード)
○
×
○
×
×
3
フィードフォワード制御簡易調整版(通常動作モード)
○
×
○
×
×
4
フィードフォワード制御簡易調整版(高速動作モード)
○
×
○
×
×
フィードフォワード制御簡易調整版(手動調整モード)
○
○
○
×
×
5
※「SP69:フィードフォワード制御機能設定」は、HA-800 ソフトウェアバージョン 2.09 から使用可能です。
*: システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効になり
ます。
10
ソフトウェアバージョン 2.08 以前からフィードフォワード制御機能を使用し、ソフト
ウェアバージョン 2.09 以降も同じ装置に HA-800C をご使用頂く場合以外では、
「SP69:フィードフォワード制御機能設定」を「0」と設定しないで下さい。
•
速度制御/トルク制御から位置制御へ切り替えた以降の動作では、フィードフォ
ワード制御機能は作用しません。
フィードフォワード制御機能を用いる場合、「AJ21:負荷慣性モーメント比」を正し
く設定する必要があります。機械諸元値または、オートチューニング機能によって正
しい値を設定してください。
「AJ03:フィードフォワードゲイン」の変更は、モータ軸の回転速度が「AJ07:零速
度判定値」の値以下になった時に有効になります。
フィードフォワード制御機能関連パラメータ(AJ20~23)の変更は、モータ停止時に
有効になります。なお、モータ動作中に設定値の変更は可能です。
SHA-CG シリーズでは、
「SP69:フィードフォワード制御機能設定」を「0」
、「1」に
設定しないで下さい。
11
付
3-17
3-5 手動によるゲインの調整方法
1
フィードフォワード制御機能ブロック図
2
HA-800 ドライバ
微分
フィード
フォワード制御部
位置制御部
速度制御部
パワー部
3
アクチュエータ
立ち上げ
CC-Link
位置指令
負荷機械装置
4
速度フィードバック
位置フィードバック
エンコーダ
5
パラメータ
フィードフォワード制御で使用するパラメータは次の通りです。
パラメータ No.
内容
初期値
SP69*1
フィードフォワード制御機能設定
*2
AJ03
0
フィードフォワードゲイン
AJ20
1
フィードフォワードフィルタ
AJ21
100
負荷慣性モーメント比
AJ22
100
トルク定数補正係数
AJ23
100
ばね定数補正係数
*1: システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効になり
ます。
*2: 初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
6
調整内容
9
フィードフォワード制御機能設定(SP69)
・設定内容
「SP69:フィードフォワード制御機能設定」が「2,3,4」の場合の、フィードフォワード制御で
の応答性を設定します。アクチュエータ内の減速機の剛性と負荷慣性モーメント(「AJ21:負荷
慣性モーメント比」)による機構共振周波数を基に、適切なフィードフォワードフィルタ周波数
を自動的に設定します。
「SP69:フィードフォワード制御機能設定」が「0,1,5」の場合、
「AJ20:フィードフォワード
フィルタ」を任意に設定することができます。
・調整方法
通常は、「SP69=3:通常動作モード」としてください。振動や応答性から下表を参考に適当な
動作モードを設定してください。なお、振動や応答性は「AJ03:フィードフォワードゲイン」
の影響を大きく受けます。また、低慣性比(「AJ21:負荷慣性モーメント比」が 20 以下の場合)
の場合には、特に振動が発生しやすくなります。
「SP69=4:高速動作モード」で応答性が満足できない場合、「SP69=5:手動調整モード」でフ
ィードフォワードフィルタを手動調整することもできます。なお、
「SP69=5:手動調整モード」
で満足できなかった場合のみ、「SP69=1:フィードフォワード制御」を使用してください。
SP69=2:安定動作モード
SP69=3:通常動作モード
SP69=4:高速動作モード
振動
小
中
大
応答性
低速
中速
高速
3-18
7
8
10
11
付
3-5 手動によるゲインの調整方法
1
2
立ち上げ
3
4
5
6
7
8
9
10
11
付
フィードフォワードゲイン(AJ03)
・調整方法
フィードフォワードゲインを高く設定すると、指令に対し早い追従性が得られますが、高すぎる
と機械的なショックや振動(ハンチング)を発生します。
「AJ03:フィードフォワードゲイン」を「0~100」の範囲で設定してください。フィードフォ
ワードゲインを 50 程度に設定し、応答を確認してください。5 程度増減させ満足する応答とな
るまで調整してください。
なお、
「AJ03:フィードフォワードゲイン」が「0」の場合、フィードフォワード制御機能は無
効となります。
・電子ギヤの設定値による影響
フィードフォワード制御は、電子ギヤ比が大きい場合には、十分な効果が得られずに振動が発生
する場合がありますので注意してください。
例えば電子ギヤの分子が大きく、分母が小さい場合は、位置決め指令パルス 1 パルス当たり(分
子)/(分母)パルス分だけ入力したのと同じになります。この場合、入力の変化が不連続な階
段状に増加します。フィードフォワード制御では、入力変化の微分演算を行うため、この入力の
不連続変化が大きくなると微分演算値が不連続になり、振動が発生する場合があります。
なお、低慣性比(「AJ21:負荷慣性モーメント比」が 20 以下の場合)や低速動作の場合には、
特に振動が発生しやすくなります。
フィードフォワードフィルタ(AJ20)
・設定内容
フィードフォワード制御を行う場合の、フィルタ周波数を設定します。「SP69:フィードフォワ
ード制御機能設定」が「0,1,5」の場合に、設定が影響します。
・調整方法
設定値が高い方が応答性が速くなりますが、振動が発生しやすくなります。なお、フィードフォ
ワード制御を有効に機能させるために、
「AJ00:位置ループゲイン」の値より大きい値とする必
要があります。応答を確認しながら徐々に設定値を高くするように設定してください。
負荷慣性モーメント比(AJ21)
・設定内容
自己慣性モーメントに対する負荷慣性モーメントの比率を設定します。100%で、自己慣性モー
メントと同等の負荷比率となります。機械の実際の負荷慣性の数値を設定してください。また、
オートチューニング機能によって自動的に設定することもできます。オートチューニング機能の
詳細については「オートチューニング」
(P9-11、P10-8)を参照してください。
・設定の作用
負荷慣性モーメント比を高く設定すると、フィードフォワード量が増加し、フィードフォワード
ゲインを上げるのと同様の効果があり、低く設定すると、フィードフォワードゲインを下げるの
と同様の効果があります。実際の機械の負荷慣性数値を正しく設定してください。
トルク定数補正係数(AJ22)
・通常使用時
アクチュエータのトルク定数のバラツキを補正します。この設定値に基づき、フィードフォワー
ド制御を行います。通常の使用においては 100%でお使いください。「SP69:フィードフォワー
ド制御機能設定」が「0,1」の場合に、設定が影響します。
・係数の作用
トルク定数補正係数 100%が基準値ですが、これを高く設定すると、アクチュエータのトルク定
数が高い事になるので、フィードフォワード制御部は、その分だけフィードフォワード量を低く
して、フィードフォワードゲインを低くするように制御します。
逆に、トルク定数補正係数を低く設定するとフィードフォワードゲインを高くするのと同様の効
果があります。アクチュエータには、わずかですがトルク定数のバラツキがあり、これを補正す
るためのパラメータですが、通常の使用においては 100%でお使いください。
ばね定数補正係数(AJ23)
・通常使用時
アクチュエータばね定数のバラツキを補正します。この設定値に基づき、フィードフォワード制
御を行います。通常の使用においては 100%でお使いください。「SP69:フィードフォワード制
3-19
3-5 手動によるゲインの調整方法
御機能設定」が「0,1」の場合に、設定が影響します。
・係数の作用
ばね定数補正係数 100%が基準値ですが、アクチュエータのばね定数のバラツキに応じてこの補
正係数を設定します。
ばね定数補正係数で補正されたアクチュエータのばね定数と、負荷慣性モーメント比(AJ21)
の設定によっては、機械的共振を起こす共振周波数があります。フィードフォワード制御部にお
いては、この周波数の部分のフィードフォワードゲインを低くする制御操作を行っています。
1
2
立ち上げ
3
4
5
6
7
8
9
10
11
付
3-20
3-6 本運転にあたって
1
2
立ち上げ
3
3-6
本運転にあたって
本ドライバは上位装置からの指令により動作します。本運転では特別の操作はありません。
ここでは、本運転の注意事項、日常の保守点検について説明します。
本運転時の注意事項
4
5
警
6
7
8
告
日常の保守点検
保守点検については、導入部門の電子機器保守点検の基準にしたがい実施してください。
9
10
11
付
(1)通電中には配線変更をしないでください。
通電のまま配線の取り外しやコネクタの抜き差しは、感電や暴走の危険があり
ます。
(2)電源遮断(オフ)の後 15 分間は、端子部に触れないでください。
電源を遮断した後も内部に電気がたまっています。
感電防止のため電源遮断(オフ)の後 15 分間は、端子部に触れないでください。
(3)電源のオン/オフでの運転はできません。
電源のオン/オフを頻繁に行うと内部回路素子が劣化します。
警
告
点検項目
端子部のねじ
ユニット外観
ユニット内部
3-21
(1)保守・点検作業実施の前に、必ず電源を遮断してください。
通電のまま保守点検作業を行うと、感電の危険性があります。
(2)電源遮断(オフ)の後 15 分間は、端子部に触れないでください。
電源を遮断した後も内部に電気がたまっています。
感電防止のため電源遮断(オフ)の後 15 分間は、端子部に触れないでください。
(3)メガーテストと耐電圧試験は行わないでください。
ドライバ内部の制御回路を破壊し、暴走の危険があります。
時期
1 年点検
1 年点検
1 年点検
点検基準
端子部のねじにゆるみのないこと
ゴミ・チリなど汚れのないこと
変色・破損・その他異常のないこと
処置法
増し締め
清掃
当社にご相談ください
3-6 本運転にあたって
1
定期交換部品について
本ドライバの下記の交換部品は、正常な動作ができなくなった場合の検出回路を備えていますが、以
下の期間を目安に交換をお勧めします。詳しくは弊社営業所にお問い合わせください。
交換時期
冷却ファン
5年
バッテリ
1年
電解コンデンサ
5年
交換方法
弊社で交換します。HA-800C ドライバを弊社営業所にご発送ください。
部品交換後、ご返却します。
弊社営業所でバッテリを購入してください。購入後「バックアップバッ
テリの交換方法」を参照して交換してください。
通年平均 40℃の環境で使用した場合です。
使用環境により変化します。
10 万回
電源投入遮断の頻度が 30 回/日以内で使用してください。
(電源投入回数)
冷却ファンは、本ドライバが通年平均 40℃の環境で 24 時間稼働をした場合の寿命です。
バッテリは、アクチュエータと本ドライバが接続された状態で、ドライバに電源を供給しない状態で放置した場
合の寿命です。
リレー
バックアップ用バッテリについて
バックアップ用バッテリとは、供給電源が遮断された場合に、アブソリュートエンコーダの多回転デ
ータを保持するためのバッテリです。
バックアップ用バッテリの交換時にもデータを保持するためのコンデンサをアブソリュートエンコー
ダ部に内蔵しています。
アブソリュートエンコーダ仕様のドライバへは、組み込み済みで出荷されます。
3
立ち上げ
交換部品
2
4
5
6
7
8
9
バックアップ用バッテリ
型式記号:HAB-ER17/33-2
バッテリ種類
メーカー
メーカー型式
10
リチウム電池
日立マクセル株式会社
ER17/33(3.6V 1600mAh)
11
データ保持時間
データ保持時間
条件
電源遮断後約 1 年
無使用状態、周囲温度:25℃、
軸停止状態、連続使用時(実
際の寿命は使用状態により変
化します。)
付
バッテリメーカーから単体購入した場合は、コネクタ配線および取り出し用リボン
は付属していません。同様の処理を施した上で使用してください。
アクチュエータ内蔵コンデンサ
データ保持時間
データ保持時間
条件
電源遮断後約 30 分
3 時間充電後、周囲温度 25
℃、軸停止状態
3-22
3-6 本運転にあたって
1
2
バックアップバッテリの交換方法
「UA91:バッテリ電源電圧低下」が表示されたときは、以下の手順でバッテリを交換してください。
1
操作部のパネルカバーを開けます。
3
パネルカバー
立ち上げ
4
5
2
バッテリを取り外します。
6
7
バッテリホルダ
8
9
3
4
新しいバッテリを取り付け、+側を下にしてバッテリホルダに入れます。
バッテリを確実に奥まで押し込み、パネルカバーを閉じます。
13bit アブソリュートエンコーダ、17bit アブソリュートエンコーダ(SHA20、FHA-Cmini
シリーズ)※では、バッテリ交換後、UA91 は自動的に解除されます。
17bit アブソリュートエンコーダ(SHA シリーズ(SHA20 除く)
)では、バッテリ交換後、
アラームリセットを実施し電源を再投入することで、UA91 が解除されます。
10
※Ver2.08 以前では、バッテリ交換後、電源を再投入することで UA91 が解除されます。
11
パネルカバーを閉じる際は、バッテリケーブルの噛み込みが無いようにご注意くださ
い。
付
3-23
第
4章
エンコーダシステム
アクチュエータの機種によりエンコーダ構成が異なります。ここでは、各アクチュエー
タの詳細を説明します。
4-1
4-2
4-3
4-4
エンコーダの概要 ······························································ 4-1
17bit アブソリュートエンコーダ ··········································· 4-4
13bit アブソリュートエンコーダ ········································· 4-13
インクリメンタルエンコーダ ············································· 4-23
4-1 エンコーダの概要
1
2
3
4-1
エンコーダの概要
アクチュエータに組み込まれたエンコーダはアクチュエータの機種により異なったタイプが組み込ま
れております。
このためそれぞれの機種による配線やドライバとの信号やり取り等が異なってきます。
以下にエンコーダタイプによる詳細を記載しますのでご使用になるアクチュエータに対応する項をご
確認ください。
4
エンコーダシステム
エンコーダタイプ
17 ビットアブソリュートエンコーダ
17 ビットエンコーダインクリメンタル
仕様
13 ビットアブソリュートエンコーダ
4 本省線インクリメンタルエンコーダ
4 本省線インクリメンタルエンコーダ
14 本線インクリメンタルエンコーダ
5
6
7
8
9
10
11
付
4-1
アクチュエータ型式
SHA シリーズ
FHA-Cmini シリーズ
ドライバ型式
HA-800C-*D/E-100/200
FHA-C シリーズ
FHA-C シリーズ
FHA-Cmini シリーズ
RSF/RKF シリーズ
HA-800C-*A-100/200
HA-800C-*C-100/200
HA-800C-*C-100/200
HA-800C-*B-100/200
詳細
P4-4
P4-13
P4-23
4-1 エンコーダの概要
HA-800C ドライバと接続可能なエンコーダの仕様は、下記の通りです。使用するアクチュエータとそ
のエンコーダ仕様により、適合するドライバの機種を選んでください。
項目
アクチュエータ
型式
17 ビット
アブソリュートエンコーダ*1
SHA シリーズ
(SHA20 除く)
SHA20、
FHA-Cmini
シリーズ
13 ビット
アブソリュー
トエンコーダ
FHA-C
シリーズ
4 本省線
インクリメンタルエンコーダ
FHA-Cmini
シリーズ
FHA-C
シリーズ
14 本線
インクリメンタ
ルエンコーダ
RSF/RKF
シリーズ
P4-4
P4-13
P4-23
P4-23
P4-23
HA-800C-3D
/E-200
HA-800C-1D
/E-100/200
HA-800C-3A
-100/200
HA-800C-6A
-100/200
HA-800C-1C
-100/200
HA-800C-3C
-100/200
HA-800C-6C
-100/200
HA-800C-3B
-100/200
HA-800C-6B
-100/200
センサ方式
磁気式センサ
1 回転:
光学式センサ
多回転:
磁気式センサ
光学式センサ
光学式センサ
光学式センサ
光学式センサ
電源遮断時デー
タ記憶
バッテリバック
アップ方式
バッテリバック
アップ方式
バッテリバック
アップ方式
モータ軸 1 回転
当たり分解能
17 ビット
17 ビット
13 ビット
(131072 パルス)
(131072 パルス)
(8192 パルス)
モータ軸最大回
転数範囲
16 ビット
16 ビット
(-32768~32767)
(-32768~32767)
13 ビット
エンコーダモニ
タ出力パルス数
パラメータ設定
可変
モータ軸1回転当
たり、最大 8192
パルス出力
パラメータ設定
可変
モータ軸1回転
当たり、最大
8192 パルス出力
固定
停電時許容最大
回転速度
6000r/min
ただし、電源投
入・エンコーダ
起動時は
300r/min
6000r/min
ただし、電源投
入・エンコーダ
起動時は
250r/min
5000r/min(定
速回転時)
1400r/min(加
速回転時)
-
ドライバ内蔵バ
ッテリバックア
ップ時間
約1年
(無通電時)
約1年
(無通電時)
約1年
(無通電時)
-
-
-
アクチュエータ
内蔵キャパシタ
バックアップ時
間
約 0.5h
約 0.5h
約 0.5h
-
-
-
(フル充電時)
(フル充電時) (フル充電時)
エンコーダ/ドラ
イバ間通信方式
ラインドライバ
レシーバ方式
ラインドライバ
レシーバ方式
ラインドライバ
レシーバ方式
ラインドライバ
レシーバ方式
ラインドライバ
レシーバ方式
A,B,Z,U,V,W パ
ラレル信号
エンコーダ/ドラ
イバ間接続ケー
ブル
EWD-S**-A083M14(型番 25、
32、40)
EWD-S**-D103M14(型番 58、
65)
2 芯より線×3
ペアシールドケ
ーブル
EWD-S**-A083M14
2 芯より線×
3ペアシール
ドケーブル
EWC-S**-B083M14
2 芯より線×4
ペアシールド
ケーブル
EWC-E**-M06
-3M14
2 芯より線×2
ペアシールド
ケーブル
EWC-E**-B043M14
2 芯より線×2
ペアシールド
ケーブル
EWA-E**-A153M14
2 芯より線×7
ペアシールド
ケーブル
適合ドライバ形
式
なし
なし
なし
8000 パルス
*2
10000 パ ル
ス*2
8000 パルス
*2
制限なし
制限なし
制限なし
固定
固定
固定
(-4096~4095)
2
3
4
エンコーダシステム
P4-4
HA-800C-3D/
E-100/200
HA-800C-6D/
E-100/200
HA-800C-24D
/E-200
詳細
1
5
6
7
8
9
-
-
10
11
付
4-2
4-1 エンコーダの概要
1
項目
2
3
アクチュエータ型
式
17 ビット
アブソリュートエンコーダ*1
13 ビット
アブソリュー
トエンコーダ
4 本省線
インクリメンタルエンコーダ
14 本線
インクリメンタ
ルエンコーダ
SHA シリーズ
(SHA20 除
く)
SHA20、
FHA-Cmini
シリーズ
FHA-C
シリーズ
FHA-Cmini
シリーズ
FHA-C
シリーズ
RSF/RKF
シリーズ
P4-4
P4-4
P4-13
P4-23
P4-23
P4-23
エンコーダ断
線
○
○
○
○
○
○
MEMORY エ
ラー
○
○
×
×
×
×
システムダウ
ン
○
○
○
×
×
×
5
1 回転データ
異常
○
○
×
×
×
×
○
○
×
×
×
×
6
多回転データ
異常
BUSY エラー
○
○
×
×
×
×
過熱エラー
○
○
×
×
×
×
通信エラー
○
○
×
×
×
×
エンコーダデ
ータ受信異常
×
×
○
○
○
○
多回転データ
オーバフロー
×
×
○
×
×
×
多回転データ
エラー
×
×
○
×
×
×
アブソリュート
データ2重化突
合せ方式
アブソリュート
データ2重化突
合せ方式
なし
なし
なし
なし
アラ―ム
エンコーダシステム
4
詳細
7
8
9
10
11
安全性・冗長性
*1: 17bit エンコーダインクリメンタル仕様は、多回転検出を行わないこと、バックアップ用バッテリを必要とし
ないこと以外は、17bit アブソリュートエンコーダと同様の物です。また、出力軸 1 回転アブソリュート仕様
(オプション記号:S)の場合にはモータ軸最大回転数範囲が減速比までとなります。
*2:4 逓倍時のパルス数です。
付
4-3
4-2 17bit アブソリュートエンコーダ
4-2
注
意
1
17bit アブソリュートエンコーダ
2
絶対位置消失やエラーにより、AL81 システムダウン、AL821 回転データ異常や AL83
多回転データ異常が発生した場合、必ず再度原点セットを行ってください。予期しな
い動作の原因になります。
3
SHA シリーズ(SHA20 除く)に搭載されているのは、多回転式 17 ビット磁気式アブソリュートエン
コーダです。
SHA20、FHA-Cmini シリーズのアブソリュートタイプに搭載されているのは、多回転式 17 ビット光
学式アブソリュートエンコーダです。(多回転検出器は磁気式です。)
モータ軸 1 回転の位置を検出するための検出器(17 ビット/回転)とモータ回転数を検出するための
累積カウンタ(16 ビット)から構成されています。
本エンコーダはドライバや外部コントローラの電源の ON/OFF に関係なく、常時機械の絶対位置を検
出し、バッテリバックアップにより記憶しています。
このため機械の据付時に一度原点出しを行えば、その後の電源投入時の原点復帰は必要ありません。
停電や故障の場合でも復旧が容易に行えます。
SHA-CG 出力軸 1 回転アブソリュート仕様(SHA-CG-S)は、インデックステーブル等一方向にのみ
動かす機械を想定しています。一方向にのみ回転し続ける場合、アブソリュートエンコーダが検出可
能な多回転検出数をいつかは超えてしまうため、位置情報を正確に管理することができなくなります。
そこで、出力軸が 1 回転するごとに多回転累積カウンタを 0 にクリアし、出力軸 1 回転アブソリュー
ト機能を実現することで、一方向にのみ回転し続ける場合の位置情報を正確に管理しています。
17 ビットアブソリュートエンコーダでは、1 回転の絶対位置検出器、および回転数の検出と累積カウ
ンタ部が、全て 2 重化されています。常時、2 重化されたデータの突合せチェックを行い、万一のエ
ンコーダの異常を自己検出できる高信頼性設計になっています。
エンコーダ内部にはバックアップ用キャパシタも装備しております。(内部バックアップ。保持時間が
短いので注意してください。)
17bit エンコーダインクリメンタル仕様は、多回転検出を行わないこと、バックアップ用バッテリを必
要としないこと以外は、17bit アブソリュートエンコーダと同様の物です。
キャパシタが新品の時に、アクチュエータに通電状態で 3 時間以上充電した場合に、
30 分のバックアップ時間です。通電時間が短時間であったり、キャパシタの経年劣化
によって、このバックアップ時間が短くなります。
4-4
エンコーダシステム
4
特長
5
6
7
8
9
10
11
付
4-2 17bit アブソリュートエンコーダ
1
HA-800ドライバ
通信制御部
2
アクチュエータ
バックアップ用
バッテリ
データ演算部
1回転検出部
3
通信制御部
多回転検出部
角度補正データ
エンコーダシステム
4
5
6
バックアップ用
キャパシタ
アクチュエータ・エンコーダ/ドライバのブロック図
標準接続
17 ビットアブソリュートエンコーダ仕様のアクチュエータと HA-800C の接続例です。
7
HA-800C-*D
白
V
8
AC サーボアクチュエータ SHA, FHA-Cmini
赤
U
M
黒
W
R2
R3
9
R1
緑/黄
10
接地端子に接続してご使用ください。
CN1
+5V
11
0V
SD
付
赤
1
黒
8
黄
5
4-5
E
17bit アブソリュートエンコーダ
青
SD
7
BAT+
2
橙
BAT-
4
灰
シールド
コネクタシェル
R1,R3 は、ショートされています。
外付けの回生抵抗を使用する場合は、
R1,R3 をオープンにして、R1,R2 間に
回生抵抗を接続してください。
外付けの回生抵抗を使用しない時は、
R1,R3 をオープンにすると内蔵回生抵
抗が動作しません。回生抵抗を外付け
しない場合は必ず R1,R3 はショート
してください。
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラ
ンドブレーン付きケーブルクラ
ンプに確実に取り付けてくださ
い。
4-2 17bit アブソリュートエンコーダ
1
立ち上げ
設定が必要なパラメータ
パラメータ
No
名称
2
機能
3
4
エンコーダシステム
CC-Link 通信等から動作指令を与えた際のアクチュエータの回転
方向、正転/逆転禁止信号や各種モニタの極性等を含めたシステ
ムの座標方向を反転させるかを設定します。
設定範囲:0,1
指令極性*
SP50
0:座標方向を反転させない。
1:座標方向を反転させる。
アクチュエータの回転方向は、「SP50:指令極性」(P8-3)を参
照してください。
17 ビットアブソリュートエンコーダの、モータ軸が一回転した
とき、エンコーダモニタ出力端子(CN2-14~19)に出力される
A 相、B 相のパルス数を設定します。
エンコーダモニタ出力パル
設定範囲:1~8192
SP61
ス数*
最大値 8192 に設定した場合、分解能的には 8192×4 逓倍=32768
パルス分に相当します。これは 17 ビットエンコーダの分解能
131072 の 1/4 倍に相当します。
17 ビットアブソリュートエンコーダをインクリメンタルエンコ
ーダとして使用するかを設定します。
設定範囲:0,1
アブソリュートエンコーダ
SP66
0:アブソリュートエンコーダとして使用する。
機能設定
(HA-800C-*D での初期値)
1:インクリメンタルエンコーダとして使用する。
(HA-800C-*E での初期値)
SHA-CG シリーズと組み合わせて位置制御で使用する場合、アク
チュエータの分解能を設定できます。
設定範囲:0~3(初期値:0)
SP67
出力軸分割機能設定*
0:出力軸 1 回転 131072×減速比 分割
1:出力軸 1 回転 3.6 万分割(分解能 0.01deg 相当)
2:出力軸 1 回転 36 万分割(分解能 0.001deg 相当)
3:出力軸 1 回転 360 万分割(分解能 0.0001deg 相当)
*: 値を変更した場合には、原点セットの処理が必要となりますので、原点セットを実行する前に変更してくだ
さい。
5
6
7
8
9
10
11
付
4-6
4-2 17bit アブソリュートエンコーダ
1
2
立ち上げ手順
1
「SP66:アブソリュートエンコーダ機能設定」を使用する方法によって設定し、電源を再投入
します。詳細については、
「SP66:アブソリュートエンコーダ機能設定」(P8-8)を参照してく
ださい。
「SP66:アブソリュートエンコーダ機能設定」を 0(HA-800C-*D での初期値)とし、アブソ
リュートエンコーダとして使用する場合、操作部のパネルカバーを開け、バックアップバッテリ
が装着されていることを確認してください。
バッテリが装着されていない場合は、「バックアップバッテリの交換方法」(P3-23)を参照し、
バッテリを装着してください。
「SP66:アブソリュートエンコーダ機能設定」を 1(HA-800C-*E での初期値)とし、インクリ
メンタルエンコーダとして使用する場合、バックアップ用バッテリは不要です。
3
4
エンコーダシステム
5
2
アブソリュートエンコーダシステムの初期化
初回の電源投入では、「AL81:システムダウン」「AL82:1 回転データ異常」や「AL83:多回転
データ異常」および「UA91:バッテリ電圧低下」ワーニングが発生します。これを初期化(多
回転データクリア)する必要があります。詳細については「T08:多回転クリア」(P9-9)を参
照ください。
「SP66:アブソリュートエンコーダ機能設定」を 1 とし、インクリメンタルエンコーダとして
使用する場合、アブソリュートエンコーダの初期化は不要です。
※ SHA20、FHA-Cmini シリーズのアブソリュートタイプでは、バッテリが正常であれば UA91
は発生しません。UA91 が発生した場合は、バッテリを交換してください。
6
7
8
3
9
パラメータの設定
「SP50:指令極性*」、「SP61:エンコーダモニタ出力パルス数*」、「SP67:出力軸分割機能設
定*」を使用する方法によって設定し、電源を再投入すると設定したパラメータが有効になりま
す。詳細については、「SP50:指令極性」(P8-3)、「SP61:エンコーダモニタ出力パルス数」
(P8-6)
、
「SP67:出力軸分割機能設定」(P8-8)、
「出力信号パルス数」
(P4-9)を参照してくだ
さい。
10
11
アブソリュートエンコーダ機能設定(バックアップバッテリの確認)
*:値を変更した場合には、原点セットの処理が必要となりますので、原点セットを実行する前に変更して
ください。
4
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、原点セットを行ってください。
付
1.アブソリュートエンコーダとして使用する場合(SP66=0)
原点セットの方法については、「原点セット」
(P4-8)を参照してください。
2.インクリメンタルエンコーダとして使用する場合(SP66=1)
アクチュエータ・ドライバと機械原点を関係付けるため、上位コントローラの原点復帰機能を用
いて原点復帰の実行、および上位コントローラにて座標管理を行ってください。
制御電源を投入した時
ドライバを交換した時
アクチュエータを交換した時
4-7
4-2 17bit アブソリュートエンコーダ
1
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、下記の手順によって原点セット*1 を行いま
す。
※:機械原点位置で、HA-800C の現在位置表示が零となります。
*1:ドライバソフトバージョン Ver2.x 以降での説明となります。
*2:
「SP50:指令極性」を「1」と設定している場合、手順⑤では「手順④(ア)(イ)で読み取った現在
値×-1」の値を設定してください。
3
4
エンコーダシステム
① 仮想原点の値を零(初期値)に設定し、HA-800C の電源を再投入してください。
② JOG 動作や手動あるいは上位コントローラの各種機能を用いて、設定したい機械原点位置に移動
させてください。
③ HA-800C のパネル操作により T08 多回転クリアを実行し、HA-800C の電源を再投入してください。
④ 以下のいずれかの方法にて、アブソリュートエンコーダの現在値を読み取ってください。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる*2。PSF-800 状態表示の数値モニタ「帰
還パルス数」を確認してください。詳細については、
「10章 通信ソフトウェア」を参照して
ください。
(イ) HA-800C ドライバの状態表示パネルを用いる*2。表示パネルの状態表示モードの d05 帰還パ
ルス(下位)と d06 帰還パルス(上位)表示により、エンコーダの現在値を確認する事ができます。
詳細については、「d05、06:帰還パルス数表示」(P7-5)を参照してください。
(ウ) CC-Link 通信を用いる。詳細については、モニタコード 000Ah、000Bh(帰還パルス累積下
位、上位)(P13-29)または、モニタコード 0019h、001Ah、001Bh(ABS 位置読み出し下
位、中位、上位)を参照してください。
⑤ 以下のいずれかの方法にて、読み取ったアブソリュートエンコーダの現在値を、仮想原点に設定し
てください*2。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる。詳細については、「パラメータ設定」
(P10-10)を参照してください。
(イ) CC-Link 通信を用いる。詳細については、命令コード 920Ch、920Dh(仮想原点下位、上位)
(P13-30)を参照してください。
⑥ 上位コントローラ及び HA-800C の電源を再投入してください。
⑦ 絶対値移動量の動作では、機械原点位置を零点として動作します。
2
5
6
7
8
9
10
11
「手順③多回転クリア→手順④現在値受信読み取り完了」までの間は、アクチュエー
タを回転させないでください。アクチュエータが動いた状態で実施すると、原点位置
ずれになる恐れがあります。
HA-800C ドライバの表示パネルの d05 帰還パルス(下位)、d06 帰還パルス(上位)
の表示は合計 8 桁分の表示のため、17 ビットアブソリュートエンコーダの現在値(10
桁分)をフルに表示すること(下位 8 桁分のみ表示)はできませんので、ご注意くだ
さい。
立ち上げ時以外においても、次の場合には原点セットを行ってください。
ドライバを交換した時
アクチュエータを交換した時
絶対位置消失やエラーにより、「AL81:システムダウン」「AL82:1 回転データ異常」や「AL83:
多回転データ異常」が発生した時
4-8
付
4-2 17bit アブソリュートエンコーダ
1
2
デ-タ出力
エンコーダ A,B,Z 相信号出力
17 ビットアブソリュートエンコーダの、モータ軸が回転するとき、CN2-14~19 ピンに A 相、B
相、Z 相のインクリメンタル信号が出力されます。モータ軸が一回転した時のパルス数はシステ
ムパラメータ SP61 によって設定します。
3
CN2-14
CN2-15
CN2-16
CN2-17
CN2-18
CN2-19
CN2-13
エンコーダシステム
4
5
6
エンコーダA+相信号出力
14
エンコーダA-相信号出力
15
エンコーダB+相信号出力
16
エンコーダB-相信号出力
17
エンコーダZ+相信号出力
18
エンコーダZ-相信号出力
19
モニタグランド
13
26LS31
出力信号パルス数
モータ軸が一回転した時の出力パルス数はパラメータとして、SP61 エンコーダモニタ出力パル
ス数によって設定します。
7
モータ軸 1 回転当たり出力パルス数
8
9
A 相信号出力
SP61 の設定値数(1~8192)
B 相信号出力
SP61 の設定値数(1~8192)
Z 相信号出力
1
*: 値を変更した場合には、原点セットの処理が必要となりますので、原点セットを実行する前に変更し
てください。
10
例えば、SP61 に最大値 8192 を設定すると、モータ軸 1 回転当たり 8192 パルスが出力されま
す。これは分解能的には 4 逓倍の 32768 パルスとなりますが、17 ビットアブソリュートエンコ
ーダのモータ軸 1 回転当たり分解能 131072 パルスの 1/4 に相当します。
8192×4=32768 (4 逓倍)
131072÷4=32768
Z 相はモータ軸 1 回転当たり 1 パルス出力されます。
11
付
A相出力+(LD)
A相出力-(LD)
B相出力+(LD)
B相出力-(LD)
Z相出力+(LD)
Z相出力-(LD)
モニタグランド
A,B,Z 相インクリメンタル出力波形
正回転時には、A相信号はB相信号に対し「進み 90°」で出力します。逆回転時には、A相信
号はB相信号に対し「遅れ 90°」で出力します。
4 逓倍方式での分解能を得るには、A相、B相両信号の立ち上がりエッジおよび立ち下がりエッ
ジを利用してください。
正回転時インクリメンタル出力信号
4-9
逆回転時インクリメンタル出力信号
A相信号
A相信号
B相信号
B相信号
4-2 17bit アブソリュートエンコーダ
SP61 に 8192 を設定した場合の 17 ビットアブソリュートエンコーダ値と A,B,Z 相波形は次の
ようになります。ただし、アクチュエータの回転速度により、アブソリュートエンコーダの値に
対して A,B,Z 相波形はドライバ内部での信号処理時間分だけ位相が遅れます。
アブソリュートエンコーダ値
-4
+4
2
3
4
エンコーダシステム
-131068
-131072
-131076
-12
-16
-8
0
+12
+8
+131076
+131072
+131068
1
5
A 相信号出力
A 相パルス数
=8192 パルス/1 回転
B 相信号出力
B 相パルス数
=8192 パルス/1 回転
Z 相信号出力
6
Z 相パルス数=1 パルス/1 回転
正回転方向
逆回転方向
7
8
信号入力方法
各相信号はラインドライバ(26LS31)で出力します。ラインレシーバ(AM26LS32 相当品)で
受信してください。
9
10
信号を受信するラインレシーバには EIA-422A 規格品をご使用ください。
11
付
4-10
4-2 17bit アブソリュートエンコーダ
1
2
3
エンコーダシステム
4
5
エラー・ワーニング対処方法
エラーの対処方法
名称
AL50
エンコーダ
断線
内容
発生要因
処置
エンコーダから
の信号が途絶え
ました。
① エンコーダ信号線の断線
② エンコーダ信号コネクタの接触不
良、接続不良
③ エンコーダの異常
④ HA-800C ドライバ制御回路の異常
① エンコーダの異常
② HA-800C ドライバ制御回路の異常
① 配線を修理してください。
② コネクタを確実に接続してください。
③ アクチュエータを交換してください。
④ HA-800C ドライバを交換してください。
AL80
MEMORY エ
ラー
AL81
システムダ
ウン
エンコーダ内部
の EEPROM メモ
リ異常
AL82
1 回転データ
異常
エンコーダの 1
回転データ異常
AL83
多回転デー
タ異常
エンコーダの多
回転データ異常
AL84
BUSY エラー
エンコーダ起動
時に、モータ軸が
一定速度以上で
回転し、位置特定
不良
AL85
過熱エラー
アクチュエータ
/エンコーダの
加熱
AL86
通信エラー
アクチュエータ
と本ドライバ間
の通信が連続 4
回以上データを
受信できません
でした。
エンコーダシス
テムのダウン
6
7
8
9
10
11
付
4-11
① 購入後初めて電源を入れた。
② SHA シリーズ(SHA20 除く)
:エ
ンコーダ内部のバックアップ用キ
ャパシタの電圧、または HA-800 ド
ライバのバッテリ電圧のどちらか
高い方の電圧が 2.85V 以下になっ
た。
SHA20、FHA-Cmini シリーズ:バ
ッテリ電圧が 2.85V 以下になった。
③ エンコーダ異常
① 初めて電源を入れた
② 外来ノイズによる誤動作
③ エンコーダ異常
① アクチュエータを交換してください。
② HA-800C ドライバを交換してください。
① T08 多回転クリア操作して、電源を再投
入してください。
② HA-800C ドライバのバッテリを新しいバ
ッテリと交換してください。バッテリ交
換後に、原点セットを実施してください。
③ アクチュエータを交換してください。
① T08 多回転クリア操作して、電源再投入
してください。
② 外来ノイズの影響を受けないように、ノ
イズ対策を行ってください
③ アクチュエータを交換してください
① 初めて電源を入れた
① T08 多回転クリア操作して、電源再投入
② 外来ノイズによる誤動作
してください。
③ エンコーダ異常
② 外来ノイズの影響を受けないように、ノ
イズ対策を行ってください。
③ アクチュエータを交換してください
① 電源 ON でエンコーダ起動時に、モ
① 電源 ON でエンコーダ起動時には、モー
ータ軸が一定速度以上で回転した。
タ軸動作が一定速度以下になるようにし
SHA シリーズ(SHA20 除く):
てください。
300r/min 以上
② アクチュエータを交換してください。
SHA20 、 FHA-Cmini シ リ ー ズ :
250r/min 以上
② エンコーダ異常
① エンコーダ内部の基板温度が 95℃
① アクチュエータ駆動条件の緩和や、ヒー
以上になった。
トシンクの放熱条件の改良などアクチュ
② ドライバのヒートシンク温度が
エータが過熱する要因を取り除いてくだ
106℃以上になった
さい
③ エンコーダ異常
② 同上
③ アクチュエータを交換してください
① エンコーダ信号線の断線
① 配線を修理してください
② エンコーダ信号コネクタの接触不
② コネクタを確実に接続してください。
良、接続不良
③ 外来ノイズの影響を受けないように、ノ
③ 外来ノイズによる誤動作
イズ対策を行ってください。
④ アース線等の接地を確認してください。
4-2 17bit アブソリュートエンコーダ
1
ワーニングの対処方法
名称
UA91
バッテリ電
圧低下
発生要因
処置
① バックアップ用バッテリの消耗に
よる電圧低下
② エンコーダバッテリ線の短絡や接
続不良
③ HA-800C ドライバ制御回路の異常
④ エンコーダ異常
① SHA シリーズ(SHA20 除く)
:新しいバ
ッテリに交換し、アラームリセットを入
力し電源を再投入してください。
SHA20、FHA-Cmini シリーズ※:新しい
バッテリに交換してください。
※ Ver2.08 以前では、バッテリ交換後、
電源を再投入することで UA91 が解除
されます。
② 配線を修理してください。
③ HA-800C ドライバを交換してください。
④ アクチュエータを交換してください。
2
3
4
エンコーダシステム
内容
バックアップ用
のバッテリ電圧
が DC3.1V 以下に
低下しました。
5
6
7
8
9
10
11
付
4-12
4-3 13bit アブソリュートエンコーダ
1
2
3
エンコーダシステム
4
5
6
7
4-3
注
13bit アブソリュートエンコーダ
意
絶対位置消失やエラーにより、AL53 システムダウン、AL54 多回転データオーバフロ
ーや AL55 多回転データエラーが発生した場合、必ず再度原点セットを行ってくださ
い。予期しない動作の原因になります。
特長
FHA-C シリーズに搭載の多回転式 13 ビット光学式アブソリュートエンコーダです。モータ軸 1 回転
の位置を検出するための検出器(13 ビット/回転)と回転数を検出するための累積カウンタ(13 ビッ
ト)から構成されています。
ドライバや外部コントローラの電源の ON/OFF に関係なく、常時機械の絶対位置を検出し、バッテリ
バックアップにより記憶しています。このため機械の据付時に一度原点出しを行えば、その後の電源
投入時の原点復帰は必要ありません。停電や故障の場合でも復旧が容易に行えます。
エンコーダ内部にはバックアップ用キャパシタも装備しております。(内部バックアップ。保持時間が
短いので注意してください。)
8
キャパシタが新品の時に、アクチュエータに通電状態で 3 時間以上充電した場合に、
30 分のバックアップ時間です。通電時間が短時間であったり、キャパシタの経年劣化
によって、このバックアップ時間が短かくなります。
9
10
HA-800Cドライバ
通信制御部
11
バックアップ用バッテリ
付
アクチュエータ
データ演算部
1回転検出部
通信制御部
多回転検出部
バックアップ用
キャパシタ
アクチュエータ・エンコーダ/ドライバのブロック図
4-13
4-3 13bit アブソリュートエンコーダ
1
標準接続
13 ビットアブソリュートエンコーダ仕様のアクチュエータと HA-800C の接続例です。
HA-800C-*A
U
白
V
M
黒
W
R2
R1
+5V
1
0V
8
黒
黄
SD
5
SD
7
BAT+
2
橙
BAT-
4
灰
青
シールド
コネクタシェル
4
エンコーダシステム
CN1
6
3
R1,R3 は、ショートされてい
ます。
外付けの回生抵抗を使用す
る場合は、R1,R3 をオープン
緑/黄
にして、R1,R2 間に回生抵抗
シールド
を接続してください。
接地端子に接続してご使用ください。 外付けの回生抵抗を使用し
ない時は、R1,R3 をオープン
緑
にすると内蔵回生抵抗が動
作しません。回生抵抗を外付
白
けしない場合は必ず R1,R3
赤
はショートしてください。
R3
CLR
2
AC サーボアクチュエータ
FHA-C シリーズ
赤
5
6
E
7
13bit アブソリュート
エンコーダ
8
ツイストペアシールドケーブル
をご使用ください。
9
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
10
11
付
4-14
4-3 13bit アブソリュートエンコーダ
1
立ち上げ
2
立ち上げ手順
3
エンコーダシステム
4
5
6
1
バッテリの装着
操作部のパネルカバーを開け、バックアップバッテリが装着されていることを確認してください。
バッテリが装着されていない場合は、「バックアップバッテリの交換方法」(P3-23)を参照し、
バッテリを装着してください。
2
アブソリュートエンコーダシステムの初期化
初回の電源投入では、「AL53:システムダウン」が発生します。これを初期化(多回転データク
リア)する必要があります。詳細については「T08:多回転クリア」(P9-9)を参照ください。
3
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、原点セットを行ってください。
原点セットの方法については、「原点セット」
(P4-16)を参照してください。
7
8
9
10
11
付
4-15
4-3 13bit アブソリュートエンコーダ
1
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、下記の手順によって原点セット*1 を行いま
す。
※:機械原点位置で、HA-800C の現在位置表示が零となります。
*1:ドライバソフトバージョン Ver2.x 以降での説明となります。
3
4
エンコーダシステム
① 仮想原点の値を零(初期値)に設定し、HA-800C の電源を再投入してください。
② JOG 動作や手動あるいは上位コントローラの各種機能を用いて、設定したい機械原点位置に移動
させてください。
③ HA-800C のパネル操作により T08 多回転クリアを実行し、HA-800C の電源を再投入してください。
④ 以下のいずれかの方法にて、アブソリュートエンコーダの現在値を読み取ってください。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる。PSF-800 状態表示の数値モニタ「帰還
パルス数」を確認してください。詳細については、「10章 通信ソフトウェア」を参照してく
ださい。
(イ) HA-800C ドライバの状態表示パネルを用いる。表示パネルの状態表示モードの d05 帰還パル
ス(下位)と d06 帰還パルス(上位)表示により、エンコーダの現在値を確認する事ができます。
詳細については、「d05、06:帰還パルス数表示」(P7-5)を参照してください。
(ウ) CC-Link 通信を用いる。詳細については、モニタコード 000Ah、000Bh(帰還パルス累積下
位、上位)(P13-29)または、モニタコード 0019h、001Ah、001Bh(ABS 位置読み出し下
位、中位、上位)を参照してください。
(エ) CN2-14~19 ピン現在値データ出力(HA-655 ドライバモード)を用いる。従来より HA-655
ドライバをお使いのお客様向けに、HA-655 ドライバと同様の A,B,Z 相出力ポートから位置デ
ータが出力されていますので、上位コントローラで受信してデータを確認します。詳細につ
いては、「CN2-14~19 ピン現在値データ出力(HA-655 ドライバモード)」
(P4-17)を参照し
てください。
⑤ 以下のいずれかの方法にて、読み取ったアブソリュートエンコーダの現在値を、仮想原点に設定し
てください。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる。詳細については、「パラメータ設定」
(P10-10)を参照してください。
(イ) CC-Link 通信を用いる。詳細については、命令コード 920Ch、920Dh(仮想原点下位、上位)
(P13-30)を参照してください。
⑥ 上位コントローラ及び HA-800C の電源を再投入してください。
⑦ 絶対値移動量の動作では、機械原点位置を零点として動作します。
2
5
6
7
8
9
10
11
付
「手順③多回転クリア→手順④現在値受信読み取り完了」までの間は、アクチュエー
タを回転させないでください。アクチュエータが動いた状態で実施すると、原点位置
ずれになる恐れがあります。
立ち上げ時以外においても、次の場合には原点セットを行ってください。
ドライバを交換した時
アクチュエータを交換した時
絶対位置消失やエラーにより、「AL53:システムダウン」「AL54:多回転データオーバフロー」や
「AL55:多回転データエラー」が発生した時
4-16
4-3 13bit アブソリュートエンコーダ
1
2
デ-タ出力
CN2-14~19 ピン現在値データ出力(HA-655 ドライバモード)
HA-655 シリーズドライバと同様にエンコーダ A,B,Z 相信号出力ポートからの位置データ出力を
します。
電源投入に引き続き、自動的に出力ポート「CN2-14 A 相出力+:A+」~「CN2-19 Z相出
力-:Z-」から現在の「現在値データ」として「多回転データ」および「絶対値」を 1 回だけ出
力します。
「現在値データ」の送信後の通常運転時にはパルス列信号を出力し、インクリメンタルエンコー
ダと同様の働きをします。
3
エンコーダシステム
4
CN2-14
CN2-15
CN2-16
CN2-17
CN2-18
CN2-19
CN2-13
5
6
7
A相出力+(LD)
A相出力-(LD)
B相出力+(LD)
B相出力-(LD)
Z相出力+(LD)
Z相出力-(LD)
モニタグランド
エンコーダA+相信号出力
14
エンコーダA-相信号出力
15
エンコーダB+相信号出力
16
エンコーダB-相信号出力
17
エンコーダZ+相信号出力
18
エンコーダZ-相信号出力
19
モニタグランド
13
26LS31
多回転データ
「多回転データ」を位相差 90°の 2 相信号により出力します。モータ軸に取り付けたエンコー
ダのカウンタの「多回転データ」が「正」のときには、「多回転データ」は「正」の値を持ち、
A相信号はB相信号に対し「進み 90°」で出力します。逆に多回転データが「負」のときには、
「多回転データ」は「負」の値を持ち、A相信号はB相信号に対し「遅れ 90°」で出力します。
パルス周波数は、100kHz です。上位装置では、この 2 相信号の「進み・遅れ」により多回転デ
ータの正負を判別してください。
カウントはA相の立ち上がりエッジを利用してください。
8
9
10
多回転:正
多回転:負
A相信号
A相信号
90°
90°
11
B相信号
B相信号
付
カウント 0
+1
+2
+3
カウント 0
-1
-2
-3
絶対位置
「絶対位置」を位相差 90°の 2 相信号により出力します。
「多回転データ」が「正」の場合には、
A相信号はB相信号に対し「進み 90°」で出力します。逆に「多回転データ」が「負」の場合
には、
「遅れ 90°」で出力します。パルス周波数は 100kHz です。
4 逓倍方式で出力するため、A 相、B 相両信号の立ち上がりエッジおよび立ち下がりエッジをカ
ウントしてください。下図の事例では、
「絶対位置=12」を表しています。
多回転が「負」の時の絶対位置
多回転が「正」の時の絶対位置
A相信号
A相信号
90°
90°
B相信号
B相信号
カウント
4-17
+1 +3
0
+2
+5
+4
+7
+6
+8
+9 +11
+10 +12
カウント
-1
0
-3
-2
-5
-4
-7
-6
-9
-11
-8 -10 -12
4-3 13bit アブソリュートエンコーダ
エンコーダ A,B,Z 相インクリメンタル信号
「多回転データ」と「絶対位置」の出力後からは、インクリメンタル方式の 2 相パルス信号を
出力します。正回転時には、A相信号はB相信号に対し「進み 90°」で出力します。逆回転時
には、A相信号はB相信号に対し「遅れ 90°」で出力します。
正回転時インクリメンタル出力信号
A相信号
B相信号
B相信号
3
5
出力信号シーケンス
多回転データ:+8、絶対値:+25、位置データの出力後逆回転し始めた時の信号出力例を下図に
示します。
主回路電源
ON
OFF
6
7
0ms(min)
8
6s(max)
ON
サーボ ON
OFF
入力可能
(:SREADY 出力)
9
2.5s(min)
10
Z 相信号出力
A 相信号出力
B 相信号出力
エンコーダシステム
4
Z相信号
Z相信号
ON
OFF
2
逆回転時インクリメンタル出力信号
A相信号
制御回路電源
1
7ms(min)
90 ms (max.)
11
1ms
1.1ms
90 ms (max.)
モータ軸 1 回転
データ
多回転データ
逆回転時インク
リメンタル信号
絶対位置データ
4-18
付
4-3 13bit アブソリュートエンコーダ
1
エンコーダ A,B,Z 相信号出力
13 ビットアブソリュートエンコーダの、モータ軸が回転するとき、CN2-14~19 ピンに A 相、B
相、Z 相のインクリメンタル信号が出力されます。
2
3
出力パルス数
モータ軸が一回転した時のパルス数は 2048 パルスです。
Z 相はモータ軸 1 回転当たり 1 パルス出力されます。なお、Z相信号は、1 回転当たり 1 パルス
出力しますが、幅は不定です。
4
エンコーダシステム
CN2-14
CN2-15
CN2-16
CN2-17
CN2-18
CN2-19
CN2-13
5
6
7
エンコーダA+相信号出力
14
エンコーダA-相信号出力
エンコーダB+相信号出力
15
16
エンコーダB-相信号出力
17
エンコーダZ+相信号出力
18
エンコーダZ-相信号出力
19
モニタグランド
13
26LS31
モータ軸 1 回転当たり出力パルス数
A相
B相
Z相
8
9
A相出力+(LD)
A相出力-(LD)
B相出力+(LD)
B相出力-(LD)
Z相出力+(LD)
Z相出力-(LD)
モニタグランド
2048
2048
1
※ Z 相は減速機がついているアクチュエータでは出力軸 1 回で減速比回数分出力されます。
10
11
付
4-19
4-3 13bit アブソリュートエンコーダ
A,B,Z 相出力信号波形
正回転時には、A相信号はB相信号に対し「進み 90°」で出力します。逆回転時には、A相信
号はB相信号に対し「遅れ 90°」で出力します。4 逓倍方式での分解能を得るには、A相、B
相両信号の立ち上がりエッジおよび立ち下がりエッジを利用してください。
正回転時インクリメンタル出力信号
逆回転時インクリメンタル出力信号
A相信号
A相信号
B相信号
B相信号
2
3
4
エンコーダシステム
Z相信号
Z相信号
1
5
13 ビットアブソリュートエンコーダ値と A,B 相波形は次のようになります。
アブソリュートエンコーダ
-8191
-8192
-8193
-4
-3
-2
-1
0
+1
+3
+2
+8192
+8191
6
+8193
7
8
9
A 相パルス数
=2048 パルス/1 回転
A 相信号出力
10
B 相パルス数
=2048 パルス/1 回転
B 相信号出力
正回転方向
11
逆回転方向
付
信号入力方法
各相信号はラインドライバ(26LS31)で出力します。ラインレシーバ(AM26LS32 相当品)で受
信してください。
信号を受信するラインレシーバには EIA-422A 規格品をご使用ください。
4-20
4-3 13bit アブソリュートエンコーダ
1
2
3
エラー・ワーニング対処方法
エラーの対処方法
名称
内容
発生要因
処置
AL50
エンコーダ
断線
エンコーダか
らの信号が途
絶えた。
① エンコーダ信号線の断線
② エンコーダ信号コネクタの接
触不良、接続不良
③ アクチュエータの温度上昇に
よるエンコーダの誤動作。
④ エンコーダの不良
⑤ HA-800C ドライバ制御回路の
異常
AL51
エンコーダ
データ受信
異常
エンコーダか
らのシリアル
データが正確
に受信できな
かった。
①エンコーダ信号線の導通不良
② エンコーダコネクタ CN1 の未
接続、または接続不良。
③ エンコーダの不良
④ HA-800C ドライバ制御回路の
異常
⑤ ノイズ等による通信異常
AL53
システムダ
ウン
エンコーダの
多回転データ
が消滅した。
① 購入後接続し、初めて電源を投
入した。
② HA-800C ドライバとアクチュ
エータを接続しない状態で長
期間放置していた。
③ エンコーダ内部のバックアッ
プ用キャパシタの電圧、または
HA-800C ドライバのバッテリ
電圧のどちらか高い方の電圧
が 2.3V 以下になりました。
④ エンコーダ異常
AL54
多回転デー
タオーバー
フロー
エンコーダの
多回転カウン
タが「-4096~
+4095」回転(モ
ータ軸)の範囲
を超えた。
① 配線を修理してください。
② コネクタを確実に接続してくだ
さい。
③ アクチュエータの設置場所、冷却
システムを見直してください。
④ アクチュエータを交換してくだ
さい。
⑤ HA-800C ドライバを交換してく
ださい。
① 配線を修理してください。
② コネクタを確実に接続してくだ
さい。
③ アクチュエータを交換してくだ
さい。
④ HA-800C ドライバを交換してく
ださい。
⑤ アース線等の接地を確認してく
ださい。
① テストモード T08 を実行して多
回転クリアを行った後、電源再投
入してください。
② テストモード T08 を実行して多
回転クリアを行った後、電源再投
入してください。
③ HA-800C ドライバのバッテリを
新しいバッテリと交換してくだ
さい。バッテリ交換後に、原点セ
ットを実施してください。
④ アクチュエータを交換してくだ
さい。
① テストモード T08 を実行して多
回転クリアを行ってください。
② アクチュエータを交換してくだ
さい。
③ HA-800C ドライバを交換してく
ださい。
AL55
多回転デー
タエラー
エンコーダの
電源が遮断さ
れ、バッテリに
よるバックア
ップ状態で、モ
ータの角加速
度と回転速度
が許容応答領
域を超えた。
① アクチュエータが一方向に回
転し、多回転カウンタが「-4096
~+4095」回転(モータ軸)の
範囲を超えて回転しました。
② エンコーダの不良
③ HA-800C ドライバ制御回路の
異常
① ドライバの電源が遮断されて ① テストモード T08 を実行して多
いるとき、モータ軸換算にて、
回転クリアを行ってください。
5000rad/s2 以 上 の 加 速 度 、 ② アクチュエータを交換してくだ
1300rpm 以上の速度で動作し
さい。
た。
③ HA-800C ドライバを交換してく
② エンコーダの不良
ださい。
③ HA-800C ドライバ制御回路の
異常
エンコーダシステム
4
5
6
7
8
9
10
11
付
4-21
4-3 13bit アブソリュートエンコーダ
ワーニングの対処方法
名称
UA91
バッテリ電
圧低下
内容
バックアップ
用のバッテリ
電圧が DC2.8V
以下に低下し
ました。
発生要因
① バックアップ用バッテリの消
耗による電圧低下
② エンコーダバッテリ線の短絡
や接続不良
③ HA-800C ドライバ制御回路の
異常
④ エンコーダ異常
処置
① 新しいバッテリと交換してくだ
さい。
② 配線を修理してください。
③ HA-800C ドライバを交換してく
ださい。
④ アクチュエータを交換してくだ
さい。
1
2
3
エンコーダシステム
4
5
6
7
8
9
10
11
付
4-22
4-4 インクリメンタルエンコーダ
1
2
3
インクリメンタルエンコーダ
インクリメンタルエンコーダは、回転角度の変化に対応したパルスを出力し、構造が比較的簡単です
が、電源を遮断すると現在位置データが消失するという欠点があり、位置制御では別に設けた原点セ
ンサへの原点復帰動作が必要になります。
標準接続
4 本省線インクリメンタルエンコーダ仕様
エンコーダシステム
4
4-4
5
HA-800C-*C
AC サーボアクチュエータ
FHA-C シリーズ
赤
FHA-Cmini シリーズ
U
6
白
V
黒
W
R2
7
R1,R3 は、ショートされていま
す。
外付けの回生抵抗を使用する場
合は、R1,R3 をオープンにして、
緑/黄
R1,R2 間に回生抵抗を接続して
シールド
ください。
外付けの回生抵抗を使用し
接地端子に接続してご使用ください。
ない時は、R1,R3 をオープン
にすると内蔵回生抵抗が動
赤
作しません。回生抵抗を外付
黒
けしない場合は必ず R1,R3
E
はショートしてください。
黄
4 本省線インクリ
青
メンタルエンコーダ
R3
R1
8
CN1
9
10
+5V
1
0V
8
SD
5
SD
7
シールド
コネクタシェル
M
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
11
付
4-23
4-4 インクリメンタルエンコーダ
14 本線インクリメンタルエンコーダ仕様
1
2
AC サーボアクチュエータ
RSF/RKF シリーズ
HA-800C-*C
赤
U
白
V
W
3
M
黒
R2
R3
緑/黄
シールド
接地端子に接続してご使用ください。
CN1
+5V
コネクタシェル
0V
1
1
8
A
5
A
B
7
2
B
4
Z
3
Z
6
U
9
U
10
V
11
V
12
W
13
W
14
赤
黒
青
青/黒
4
エンコーダシステム
R1
R1,R3 は、ショートされてい
ます。
外付けの回生抵抗を使用す
る場合は、R1,R3 をオープン
にして、R1,R2 間に回生抵抗
を接続してください。
外付けの回生抵抗を使用
しない時は、R1,R3 をオ
ープンにすると内蔵回生
抵抗が動作しません。回
生抵抗を外付けしない場
合は必ず R1,R3 はショー
トしてください。
5
6
7
緑
緑/黒
黄
黄/黒
茶
茶/黒
8
E
14 本線インクリメンタル
エンコーダ
9
灰
灰/黒
白
10
白/黒
シールド
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
11
付
4-24
4-4 インクリメンタルエンコーダ
1
立ち上げ
2
設定が必要なパラメータ
3
立ち上げ手順
特にありません。
1
インクリメンタルエンコーダシステムの初期化
FHA-Cmini シリーズ、FHA-C シリーズ、RSF/RKF シリーズ各アクチュエータのインクリメンタ
ルエンコーダシステムの場合、ドライバの電源投入時に、ドライバの帰還パルス値は 0 にリセ
ット(初期化)されます。
エンコーダシステム
4
5
2
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、原点セットを行ってください。
原点セットの方法については、「原点セット」
(P4-26)を参照してください。
6
7
8
9
10
11
付
4-25
4-4 インクリメンタルエンコーダ
1
原点セット
アクチュエータ・ドライバと機械原点を関係付けるため、下記の手順によって原点セット*1 を行います。
※:機械原点位置で、HA-800C の現在位置表示が零となります。
*1:ドライバソフトバージョン Ver2.x 以降での説明となります。
2
3
4
エンコーダシステム
① 仮想原点の値を零(初期値)に設定し、HA-800C の電源を再投入してください。
② 通常使用する原点復帰を行ってください。
③ 以下のいずれかの方法にて、インクリメンタルエンコーダの現在値が 0 であることを確認してく
ださい。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる。PSF-800 状態表示の数値モニタ「帰還
パルス数」を確認してください。詳細については、「10章 通信ソフトウェア」を参照してく
ださい。
(イ) HA-800C ドライバの状態表示パネルを用いる。表示パネルの状態表示モードの d05 帰還パル
ス(下位)と d06 帰還パルス(上位)表示により、エンコーダの現在値を確認する事ができます。
詳細については、「d05、06:帰還パルス数表示」(P7-5)を参照してください。
(ウ) CC-Link 通信を用いる。詳細については、モニタコード 000Ah、000Bh(帰還パルス累積下
位、上位)(P13-18)または、モニタコード 0019h、001Ah、001Bh(ABS 位置読み出し下
位、中位、上位)を参照してください。
④ 機械原点位置へ JOG 動作等で動作部を移動させてください。必ず手順②の操作から電源を切らず
に行ってください。
⑤ 機械原点位置で停止している状態で、手順③のいずれかの方法にてインクリメンタルエンコーダの
現在値を読み取ってください。
⑥ 以下のいずれかの方法にて、読み取ったインクリメンタルエンコーダの現在値を、仮想原点に設定
してください。
(ア) HA-800 ドライバ用モニタソフト PSF-800 を用いる。詳細については、「パラメータ設定」
(P10-11)を参照してください。
(イ) CC-Link 通信を用いる。詳細については、命令コード 920Ch、920Dh(仮想原点下位、上位)
(P13-27)を参照してください。
⑦ 上位コントローラ及び HA-800C の電源を再投入してください。
⑧ 原点復帰動作を行うと手順④にて決めた機械原点位置で停止し、現在値が 0 になります。
5
6
7
8
9
10
11
立ち上げ時以外においても、次の場合には原点セットを行ってください。
制御電源を投入した時
ドライバを交換した時
アクチュエータを交換した時
付
4-26
4-4 インクリメンタルエンコーダ
1
2
3
デ-タ出力
エンコーダ A,B,Z 相信号出力
エンコーダの、モータ軸が回転するとき、CN2-14~19 ピンに A 相、B 相、Z 相のインクリメンタル信
号が出力されます。
出力パルス数
モータ軸が一回転した時の A 相、B 相の信号出力パルス数はエンコーダの分解能によります。
Z 相はモータ軸 1 回転当たり 1 パルス出力されます。
4
エンコーダシステム
CN2-14
CN2-15
CN2-16
CN2-17
CN2-18
CN2-19
CN2-13
5
6
7
8
9
A相出力+(LD)
A相出力-(LD)
B相出力+(LD)
B相出力-(LD)
Z相出力+(LD)
Z相出力-(LD)
モニタグランド
エンコーダA+相信号出力
14
エンコーダA-相信号出力
エンコーダB+相信号出力
15
16
エンコーダB-相信号出力
17
エンコーダZ+相信号出力
18
エンコーダZ-相信号出力
19
モニタグランド
13
モータ軸 1 回転当たり出力パルス数
A相
(エンコーダの分解能)/4
A,B,Z 相出力信号波形
正回転時には、A相信号はB相信号に対し「進み 90°」で出力します。逆回転時には、A相信
号はB相信号に対し「遅れ 90°」で出力します。
4 逓倍方式での分解能を得るには、A相、B相両信号の立ち上がりエッジおよび立ち下がりエッ
ジを利用してください。
正回転時インクリメンタル出力信号
付
*1
B相
(エンコーダの分解能)/4 *1
Z相
1
*1:例としてエンコーダの分解能が 10000 パルスの場合、10000/4=2500 パルスとなります。
※ Z 相は減速機がついているアクチュエータでは出力軸 1 回で減速比回数分出力されます。
10
11
26LS31
逆回転時インクリメンタル出力信号
A 相信号出力
A 相信号出力
B 相信号出力
B 相信号出力
Z 相信号出力
Z 相信号出力
信号入力方法
各相信号はラインドライバ(26LS31)で出力します。ラインレシーバ(AM26LS32 相当品)で
受信してください。
信号を受信するラインレシーバには EIA-422A 規格品をご使用ください。
4-27
4-4 インクリメンタルエンコーダ
1
エラー対処方法
2
内容
発生要因
処置
AL50
エンコーダ
断線
エンコーダか
らの信号が途
絶えました。
① エンコーダ信号線の断線
② エンコーダ信号コネクタ CN1
の接触不良、接続不良
③ アクチュエータの温度上昇に
よるエンコーダの誤動作。
④ エンコーダの不良
⑤ HA-800 ドライバ制御回路の異
常
① 配線を修理してください。
② コネクタを確実に接続してくだ
さい。
③ アクチュエータの設置場所、冷却
システムを見直してください。
④ アクチュエータを交換してくだ
さい。
⑤ HA-800 ドライバを交換してくだ
さい。
① 配線を修理してください。
② コネクタを確実に接続してくだ
さい。
③ アクチュエータを交換してくだ
さい。
④ HA-800 ドライバを交換してくだ
さい。
⑤ アース線等の接地を確認してく
ださい。
① 配線を修理してください。
② コネクタを確実に接続してくだ
さい。
③ アクチュエータを交換してくだ
さい。
④ HA-800 ドライバを交換してくだ
さい。
AL51
エンコーダ
データ受信
異常
AL52
UVW 異常
エンコーダか
らのシリアル
データが正確
に受信できま
せんでした。
エンコーダの
UVW 相の信号
が異常。
① エンコーダ信号線の導通不良
② エンコーダ信号コネクタ CN1
の接触不良、接続不良。
③ エンコーダの不良
④ HA-800 ドライバ制御回路の異
常
⑤ ノイズ等による通信異常
① エンコーダ信号線の導通不良
② エンコーダ信号コネクタ CN1
の接触不良、接続不良。
③ エンコーダの不良
④ HA-800 ドライバ制御回路の異
常
3
4
エンコーダシステム
名称
5
6
7
8
9
10
11
付
4-28
4-4 インクリメンタルエンコーダ
1
2
3
エンコーダシステム
4
5
6
7
8
9
10
11
付
4-29
第
5章
入出力信号
ここでは、入出力信号の信号条件、信号の機能詳細を説明します。
5-1
5-2
5-3
5-4
5-5
入出力信号一覧 ································································· 5-1
入力信号詳細 ···································································· 5-5
出力信号詳細 ···································································· 5-7
モニタ出力 ······································································· 5-9
デフォルト(工場出荷時)の接続例 ········································· 5-11
5-1 入出力信号一覧
1
2
3
4
5
入出力信号
6
7
8
9
10
11
付
5-1
入出力信号一覧
本ユニットは CN2 コネクタを介して上位機器と通信を行います。ここでは、その入出力信号について
説明します。
入出力信号のピン番号と名称
ピン
番号
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
信
号
略号
IN-COM
E-STOP
ALM-CLR
ERR-CLR
ORG
IN-COM
OUT-COM
READY
ALARM
ORG-END
Z-OC 注 1
OUT-COM
MON-COM
A+
AB+
BZ+ 注 1
Z- 注 1
FG
入力信号コモン
非常停止
アラームクリア
偏差クリア
原点信号
入力信号コモン
出力信号コモン
運転準備完了
アラーム
原点復帰(認識)完了
エンコーダ Z 信号(OC)
出力信号コモン
モニターコモン
エンコーダモニタ(A+)
エンコーダモニタ(A-)
エンコーダモニタ(B+)
エンコーダモニタ(B-)
エンコーダモニタ(Z+)
エンコーダモニタ(Z-)
フレームグランド
注 1:11pin は、オープンコレクタ出力
18,19pin はラインドライバ(AM26LS31 相当)出力となります。
入出力信号コネクタCN2 の型式
CN2 コネクタの型式は以下のとおりです。
メーカー
型式
5-1
コネクタ
3M
10120-3000PE
入力
出力
入力
入力
入力
入力
入力
入力
出力
出力
出力
出力
出力
出力
出力
出力
出力
出力
出力
出力
出力
カバー
3M
10320-52F0-008
5-1 入出力信号一覧
1
入出力信号接続回路
入出力信号ポートと上位装置との接続法を説明します。
2
入力ポートの仕様
4 個の入力信号ポートを備えています。
電圧 DC24V±10%
電流 20mA 以下 (1 ポートあたり)
3
4
1
IN-COM
DC24V
0V
外部供給電源
2.2k
E-STOP
非常停止
2
2.2k
アラームクリア
ALM-CLR
偏差クリア
ERR-CLR
5
3
2.2k
入出力信号
4
2.2k
ORG
原点信号
5
6
HA-800C
接続方法
IN-COM
HA-800C ドライバには入力信号用電源を
内蔵していません。「CN2-1:入力信号コ
モン」に入力信号用外部供給電源のコモ
ン電圧として「DC24V」または「GND」
を接続してください。
2.2kΩ
7
0.01μF
8
510Ω
入力信号
9
(コモン電圧として DC24V を接続した例)
入力信号の機能(論理)について
10
機能(論理)の定義
上位より入力信号状態
フォトカプラ ON
フォトカプラ OFF
回路状態
IN-COM
HA-800 側
IN-COM
11
HA-800 側
付
論理設定
0:ノーマルオープン(A 接)
論理 NO
1:ノーマルクローズ(B 接)
論理 NC
有効
無効
無効
有効
有効:選択された信号の機能を有効にする状態です。
無効:選択された信号の機能を無効にする状態です。
機能(論理)の変更方法
入力信号の論理は、
「SP62:入力信号論理設定」(P8-6)により変更が可能です。
入力信号のデフォルトはすべてノーマルオープンに設定されていますが、非常停止入力を使用す
る場合は必ずノーマルクローズに変更して使用してください。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変
更が有効になります。
5-2
5-1 入出力信号一覧
1
出力ポートの仕様
2
4 個の出力信号ポートを備えています。
電圧 DC24V 以下
電流 40mA 以下 1 ポートあたり)
いずれもフォトカプラで絶縁してあります。
3
運転準備完了
アラーム
原点復帰(認識)完了
Z 相(OC)出力
それぞれの出力ポートと「CN2-7/12:出
力信号コモン OUT-COM」の間に出力信
号を接続してください。
入出力信号
8
ALARM
9
ORG-END
10
Z-OC
11
接続方法
6
7
8
7/12
OUT-COM
4
5
READY
CN2-8~11
HA-800C
PS2802
Ry
OUT-COM
CN2-7/12
出力信号の機能(論理)について
機能(論理)の定義
9
論理設定
0
1
トランジスタ出力信号の状態
トランジスタ ON
トランジスタ OFF
有効
無効
無効
有効
有効:出力信号の機能が有効な状態です。
無効:出力信号の機能が無効な状態です。
10
機能(論理)の変更方法
11
出力信号の論理設定は、「SP63:出力論理設定」(P8-7)により変更が可能です。
詳細は8-7ページを参照してください。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変
更が有効になります。
付
5-3
5-1 入出力信号一覧
1
モニタ用出力信号の仕様
エンコーダ信号モニタ用に右図のように出力
信号に 6 ポート 3 信号を備えています。
エンコーダのA相、B相、Z相信号をラインド
ライバ(26LS31)で出力します。
接続方法
ラインレシーバ(AM26LS32 相当)で受
信してください。
エンコーダA+相信号出力
14
エンコーダA-相信号出力
15
エンコーダB+相信号出力
16
エンコーダB-相信号出力
17
エンコーダZ+相信号出力
18
エンコーダZ-相信号出力
19
モニタグランド
13
2
3
26LS31
4
5
入出力信号
6
7
8
9
10
11
付
5-4
5-2 入力信号詳細
1
2
3
4
5
入出力信号
6
7
8
9
10
11
5-2
入力信号詳細
ここでは、入力信号の詳細について説明します。
CN2-1 入力信号コモン:IN-COM
「CN2-2,3,4,5」に対するコモンです。
入力信号用外部供給電源の「DC24V」又は、
「0V」を接続してください。
CN2-2 非常停止:E-STOP
この信号が有効になるとサーボオフし、アラーム出力を行います。シーケンサのトラブル等により、
正常な CC-Link コマンドを送信できない場合など、危険を回避するためにこの信号を使用します。
この信号はデフォルトでは、ノーマルオープンになっています。CN2 ケーブル断線時に非常停止とす
るような、フェイルセーフを実現する場合には、ノーマルクローズに切り替えて使用してください。
CN2-3 アラームクリア:ALM-CLR
HA-800C ドライバのアラームが発生している場合、この信号入力のエッジでアラーム状態を解除しま
す。この信号はデフォルトでは、ノーマルオープンになっています。論理を変更して使用する場合は、
ノーマルクローズに切り替えて使用してください。
アラームクリアは、CC-Link からも実行可能です。
CN2-4 偏差クリア:ERR-CLR
HA-800C ドライバが位置制御で動作している場合、この信号入力のエッジで偏差カウンタの値を指令
カウンタに加算して偏差カウンタを 0 にします。この信号はデフォルトでは、ノーマルオープンにな
っています。論理を変更して使用する場合は、ノーマルクローズに切り替えて使用してください。
偏差クリアは、CC-Link からも実行可能です。
付
HA-800 ソフトウェアバージョン Ver2.10 以前かつインクリメンタルエンコーダ搭載の
アクチュエータでは、帰還パルスが原点位置から-2147483648~2147483647 を超えた
場合には偏差クリアを実施しないで下さい。
5-5
5-2 入力信号詳細
1
CN2-5 原点信号:ORG
原点復帰動作での原点信号に用います。詳細については「原点復帰動作について」(P13-9)を参照して
ください。
2
3
4
5
入出力信号
6
7
8
9
10
11
付
5-6
5-3 出力信号詳細
1
2
3
4
5
入出力信号
6
7
8
9
10
11
付
5-3
出力信号詳細
ここでは、出力信号の詳細について説明します。
CN2-8 運転準備完了:READY
HA-800C ドライバの運転準備完了信号出力です。この信号は、CC-Link の RYn0:サーボオン指令が 1
になり、アクチュエータがサーボオンした場合に出力されます。この信号は、CC-Link の RXn0:準備
完了(Ready)にも出力されています。この信号はデフォルトでは正論理(有効時にフォトカプラ PS2802
が ON)になっています。論理を変更する場合は、負論理に切り替えて使用してください。
CN2-9 アラーム:ALARM
HA-800C ドライバの異常検出信号です。この信号は、CC-Link の RXn7:サーボアラームにも出力さ
れています。この信号はデフォルトでは負論理(有効時にフォトカプラ PS2802 が OFF)になってい
ます。論理を変更して使用することもできますが、危険防止のためこの信号を使用する際はデフォル
トの設定で使用してください。
CN2-10 原点復帰(認識)完了:ORG-END
インクリメンタルエンコーダ搭載のアクチュエータと組み合わせて使用する場合は、原点復帰動作を
実行して、基準点を認識している場合に有効になります。
アブソリュートエンコーダまたは、17bit アブソリュートエンコーダ搭載のアクチュエータと組み合わ
せて使用する場合は、エンコーダの現在値を HA-800C ドライバが認識している場合に有効になります。
この信号は、CC-Link の RXn2:原点復帰完了にも出力されています。この信号はデフォルトでは正論
理(有効時にフォトカプラ PS2802 が ON)になっています。論理を変更して使用する場合は、PSF-800
を使用して、負論理に切り替えて使用してください。
*原点復帰動作の詳細については、「原点復帰動作について」(P13-9)を参照してください。
CN2-11
Z相出力(OC):Z
エンコーダの Z 相の信号をオープンコレクタで出力します。この信号は、モータ 1 回転に 1 パルスだ
け出力します。自動機構の原点センサ信号と併せて、正確な原点位置を認識することなどに使用でき
ます。
CN2-7/12 出力信号コモン:OUT-COM (出力信号)
「CN2-8,9,10,11」の出力信号のコモン端子です。
5-7
5-3 出力信号詳細
1
CN2-14~19 エンコーダ信号出力(A,B,Z)
エンコーダのA相、B相、Z相信号をラインドライバ(26LS31)で出力します。
ピン
No
14
15
16
17
18
19
名称
エンコーダモニタ(A+)
エンコーダモニタ(A-)
エンコーダモニタ(B+)
エンコーダモニタ(B-)
エンコーダモニタ(Z+)
エンコーダモニタ(Z-)
2
略号
A+
AB+
BZ+
Z-
3
4
5
接続方法
注 ラインレシーバには EIA-422A 規格品を使用
ください。
A相出力+(LD)
14
A相出力-(LD)
B 相出力+(LD)
15
16
B 相出力-(LD)
17
Z 相出力+(LD)
18
Z 相出力-(LD)
19
モニタグランド
13
入出力信号
ラインレシーバ(AM26LS32 相当品)で受
信してください。
6
26LS31
7
8
CN2-20 接地:FG
9
ケーブルのシールドを接続します。
10
11
付
5-8
5-4 モニタ出力
1
2
3
4
5
5-4
モニタ出力
ここでは、CN9 コネクタより出力される速度波形、電流波形、及びシステムパラメータモード 3
「SP40:CN9-CP3 出力信号設定」で設定された信号波形を出力する方法を説明します。
CN9-1:速度モニタ(SPD-MON)
モータの回転速度を電圧(10V あたりの速度入力係数)で出力します。出力電圧と回転速度の関係は、
システムパラメータモード 3「SP51:速度入力係数」の設定値を使って得られます。ただし電源投入
後、「運転準備完了:READY」が出力されるまでは出力が不安定です。
(最大で約±15V 出力すること
があります。
)
モータ回転速度(r/min)=速度モニタ出力電圧(V)×
入出力信号
6
出力の仕様
7
接続法
速度入力係数
10.0V
出力電圧範囲:-10V~+10V
出力インピーダンス:1 kΩ
オプションのモニタ用ケーブル(EWA-MON01-JST4)
のコネクタを CN9 に挿入して、「CN9-1 速度モニ
タ:SPD-MON」と「CN9-4 モニタグランド:GND」
間の波形をオシロスコープで確認してください。
8
SPD-MON
CN9-1
CN9-4
9
10
11
付
1kΩ
GND
CN9-2:電流モニタ(CUR-MON)
アクチュエータに対する指令電流を電圧(10V あたりのトルク入力係数)で出力します。出力電圧と
電流の関係はシステムパラメータモード 3「SP53:トルク入力係数」の設定値を使って得られます。
ただし電源投入後、
「運転準備完了:READY」が出力されるまでは出力が不安定です。
(最大で約±15V
出力することがあります。
)
トルク入力係数
アクチュエータ電流(A)
=電流モニタ出力電圧(V)
×
10.0V
出力の仕様
出力電圧範囲:-10V~+10V
出力インピーダンス:1kΩ
接続法
オプションのモニタ用ケーブル(EWA-MON01-JST4)
CUR-MON
のコネクタを CN9 に挿入して、「CN9-2 電流モニ
CN9-2
タ:TRQ-MON」と「CN9-4 モニタグランド:GND」
間の波形をオシロスコープで確認してください。
CN9-4
5-9
1kΩ
GND
5-4 モニタ出力
1
CN9-3:信号モニタ(SIG-MON)
システムパラメータモード 3「SP40:CN9-CP3 出力信号設定」で設定された信号波形を出力します。
Low は 0V、High は 3.3V で出力されます。但し電源投入後、「運転準備完了:READY」が出力される
までは出力が不安定です。
出力の仕様
3
出力電圧範囲:0 or 3.3V
出力インピーダンス:1kΩ
接続法
オプションのモニタ用ケーブル(EWA-MON01-JST4) SIG-MON
のコネクタを CN9 に挿入して、「CN9-3 信号モニ
CN9-3
タ:SIG-MON」と「CN9-4 モニタグランド:GND」
CN9-4
間の波形をオシロスコープで確認してください。
4
Ω
1kΩ
5
GND
入出力信号
6
CN9-4:モニタグランド(GND)
7
アナログモニタ「CN9-1,2,3」用のコモン端子です。
※
信号のモニタには、オプションの専用ケーブルが必要です。(EWA-MON01-JST4)
8
9
4321
線色
1:赤
2
2:白
3:黒
4:緑
10
11
付
5-10
5-5 デフォルト(工場出荷時)の接続例
1
2
5-5
デフォルト(工場出荷時)の接続例
4 本省線インクリメンタル仕様(FHA-Cシリーズ)の場合
HA-800C-*-***
3
4
CN2
TB2
IN-COM
外部供給電源
DC24V
0V
E-STOP
偏差クリア
入出力信号
原点信号
運転準備完了
アラーム出力
7
ALM-CLR
Z(OC)出力
出力信号コモン
9
4
ORG
5
READY
8
ALARM
Z(OC)
OUT-COM
CC-Link
付
2.2k
S
N/F
11
V
7/12
W
白
R2
26LS31
R1,R3 は、ショートさ
れています。
外付けの回生抵抗を
使用する場合は、
R1,R3 をオープンに
緑/黄
して、R1,R2 間に回生
抵抗を接続してくだ
さい。
シールド
外付けの回生抵抗を
使用しない時は、
R1,R3 をオープンに
すると内蔵回生抵抗
が動作しません。回
接地端子に接続してご使用ください。生抵抗を外付けしな
い場合は必ず R1,R3
はショートしてくだ
さい。
R1
20
CN1
CN4
1・・DA
2・・DB
5・・FG
1・・DA
2・・DB
3・・DG
4・・SLD
M
黒
R3
2・・DB
4・・SLD
配線用遮断器
AC サーボアクチュエータ
赤
FHA-**C-**-E250
1・・DA
3・・DG
AC200V
(50/60Hz)
または
AC100V
(50/60Hz)
T
TB1
U
15
16
17
18
19
13
11
R
10
14
シールド
2.2k
電源入力
9
エンコーダA-相信号出力
エンコーダB+相信号出力
エンコーダZ-相信号出力
モニタグランド
ノイズフィルタ
電磁接触器
エンコーダA+相信号出力
エンコーダB-相信号出力
エンコーダZ+相信号出力
10
s
3
ERR-CLR
原点復帰/認識完了 ORG-END
8
2
2.2k
アラームクリア
6
r
2.2k
非常停止*
5
1/6
3・・DG
4・・SLD
5・・FG
+5V
1
0V
8
SD
SD
コネクタシェル
赤
黒
黄
5
E
インクリメンタルエンコーダ
青
7
シールド
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
5・・FG
35715-L010-B00 AK(3M)
5-11
※非常停止入力はデフォルト設定は、ノーマルオープンになっていますが、使用する場合は必ず
SP62:入力信号論理設定により、ノーマルクローズに変更して使用してください。
5-5 デフォルト(工場出荷時)の接続例
1
13bitアブソリュート仕様(FHA-Cシリーズ)の場合
HA-800C-*-***
CN2
IN-COM
外部供給電源
1/6
DC24V
0V
2
TB2
r
2.2k
E-STOP
非常停止*
s
2
ノイズフィルタ
2.2k
アラームクリア
偏差クリア
原点信号
ALM-CLR
2.2k
ERR-CLR
4
ORG
5
S
N/F
2.2k
T
配線用遮断器
READY
ALARM
原点復帰/認識完了 ORG-END
8
10
AC サーボアクチュエータ
赤
FHA-**C-**-S248
白
V
Z(OC)出力
出力信号コモン
Z(OC)
11
OUT-COM
7/12
W
14
エンコーダA-相信号出力
エンコーダB+相信号出力
15
16
エンコーダB-相信号出力
エンコーダZ+相信号出力
17
18
エンコーダZ-相信号出力
モニタグランド
19
13
シールド
7
R2
R1,R3 は、ショート
されています。
外付けの回生抵抗
を使用する場合は、
R1,R2 を オ ー プ ン
緑/黄
にして、R1,R3 間に
回生抵抗を接続し
てください。
シールド
外付けの回生抵抗
を使用しない時は、
R1,R3 を オ ー プ ン
にすると内蔵回生
抵抗が動作しませ
接地端子に接続してご使用ください。
ん。回生抵抗を外付
けしない場合は必
緑
ず R1,R3 はショー
トしてください。
R3
エンコーダA+相信号出力
M
黒
26LS31
R1
20
CN1
CLR
6
白
CC-Link
1・・DA
2・・DB
CN4
3・・DG
4・・SLD
5・・FG
1・・DA
1・・DA
2・・DB
4・・SLD
5・・FG
3・・DG
+5V
1
0V
8
SD
赤
黒
黄
5
7
BAT+
2
橙
BAT-
4
灰
13bit アブソリュートエンコーダ
シールド
コネクタシェル
8
9
10
11
E
青
SD
3・・DG
2・・DB
5
6
9
TB1
U
4
入出力信号
アラーム出力
AC200V
(50/60Hz)
または
AC100V
(50/60Hz)
R
3
電磁接触器
運転準備完了
電源入力
3
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
4・・SLD
5・・FG
35715-L010-B00 AK(3M)
※非常停止入力はデフォルト設定は、ノーマルオープンになっていますが、使用する場合は必ず
SP62:入力信号論理設定により、ノーマルクローズに変更して使用してください。
5-12
付
5-5 デフォルト(工場出荷時)の接続例
1
17bitアブソリュートエンコーダ仕様(SHAシリーズ)の場合
HA-800C-*-***
2
3
4
IN-COM
外部供給電源
r
s
2
原点信号
入出力信号
運転準備完了
アラーム出力
ALM-CLR
3
ERR-CLR
4
S
2.2k
ORG
5
READY
8
ALARM
N/F
T
電磁接触器
U
10
V
Z(OC)
11
R2
OUT-COM
7/12
R3
8
配線用遮断器
AC サーボアクチュエータ
赤
SHA
TB1
9
白
M
黒
W
出力信号コモン
AC200V
(50/60Hz)
または
AC100V
(50/60Hz)
R
2.2k
原点復帰/認識完了 ORG-END
Z(OC)出力
R1
26LS31
エンコーダA+相信号出力
14
9
エンコーダA-相信号出力
エンコーダB+相信号出力
15
16
エンコーダB-相信号出力
エンコーダZ+相信号出力
17
18
10
エンコーダZ-相信号出力
モニタブランド
19
13
シールド
11
電源入力
ノイズフィルタ
2.2k
偏差クリア
7
1/6
2.2k
E-STOP
アラームクリア
6
TB2
DC24V
0V
非常停止*
5
CN2
緑/黄
接地端子に接続してご使用ください。
20
R1,R3 は、ショートされ
ています。
外付けの回生抵抗を使
用する場合は、R1,R3 を
オープンにして、R1,R2
間に回生抵抗を接続し
てください。
外付けの回生抵抗を使
用しない時は、R1,R3 を
オープンにすると内蔵
回生抵抗が動作しませ
ん。回生抵抗を外付けし
な い 場 合 は 必ず R1,R3
はショートしてくださ
い。
CN1
CC-Link
1・・DA
2・・DB
付
3・・DG
4・・SLD
5・・FG
1・・DA
CN4
1
0V
8
SD
赤
黒
黄
5
SD
7
2・・DB
BAT+
2
橙
BAT-
4
灰
3・・DG
2・・DB
5・・FG
E
17bit アブソリュートエンコーダ
青
1・・DA
4・・SLD
3・・DG
+5V
シールド
コネクタシェル
ツイストペアシールドケーブル
をご使用ください。
シールドは適用コネクタのグラン
ドブレーン付きケーブルクランプ
に確実に取り付けてください。
4・・SLD
5・・FG
35715-L010-B00 AK(3M)
※非常停止入力はデフォルト設定は、ノーマルオープンになっていますが、使用する場合は必ず
SP62:入力信号論理設定により、ノーマルクローズに変更して使用してください。
5-13
第
6章
パネル表示と操作
ここでは、ドライバの前面パネルの表示部と操作ボタンの操作法、各モードの操作概要
を説明します。
6-1 表示パネル部の操作 ····························································· 6-1
6-1 表示パネル部の操作
1
2
3
4
5
パネル表示と操作
6
6-1
正面の表示部には、5 桁の LED 表示部と 4 個の操作キーを備えています。この表示部で、調整・設定・
操作を行うことができます。
モードの概要
表示パネルは、以下の 5 つのモードによって操作します。
状態表示モード(d00~d16)
モータエンコーダからの現在位置情報、偏差カウンタの溜まりパルスの状態、入出力信号の状態、
負荷状況、アラームの履歴、組み合わすべきアクチュエータのコード番号などを表示します。詳
細は「状態表示モード」(P7-1)を参照してください。
アラームモード(AL、A1~A8、AHcLr)
現在発生中のアラームや、過去8回分のアラーム履歴を表示します。また、アラームモードでア
ラーム履歴の消去もできますので、装置完成後にアラーム履歴のクリアを行うこと推奨いたしま
す。
表示パネルがどのモードでも、HA-800C ドライバがアラーム状態になると、アラームモードに
移行し現在発生しているアラームコードを表示します。
詳細は「アラームモード」
(P7-8)を参照してください。
7
8
9
調整モード1,2,3(AJ00~AJ59)
サーボゲインなどのパラメータの表示と変更が可能です。
調整モードのパラメータは、アクチュエータが動作中でも変更が可能です。また、変更した値は
リアルタイムに反映されます。
詳細は「7章調整モード」を参照してください。
10
11
付
表示パネル部の操作
システムパラメータ設定モード3,4(SP40~SP79)
HA-800C ドライバの機能について設定します。全てのパラメータはサーボオン中でも変更する
ことが出来ますが、HA-800C の電源を再投入しないと有効になりません。
テストモード(T00~T11)
CN2 の入出力信号のモニタ、出力信号の操作、パラメータ初期化、多回転クリア、オートチュ
ーニングを行うことができます。
また、簡易的に JOG 動作を行うこともできるので、HA-800C ドライバとアクチュエータの結線
を行うだけで、アクチュエータを動作させることが可能です。
6-1
6-1 表示パネル部の操作
1
ドライバ起動時のパネル表示
正常状態で起動した場合と、アラーム状態で起動した場合のパネル表示について説明します。
2
制御電源投入時の表示
3
ドライバの制御電源を投入すると、パネル表示
部に、”HA-800”というドライバ型式が、右から
順番に表示されます。
MODE
UP
4
DOWN S E T
5
ディスプレイ用のソフトウェアのバージョンを
約 1 秒間表示します。
UP
6
DOWN S E T
パネル表示と操作
MODE
7
制御用のソフトウェアのバージョンを約 1 秒間
表示します。
MODE
UP
8
DOWN S E T
9
アラーム状態
正常状態
10
11
MODE
UP
DOWN S E T
「SP54:状態表示設定」で設定し
た状態データを表示します。
MODE
UP
DOWN S E T
付
アラームモードで起動し、現在のアラーム
を表示します。
複数のアラームまたはワーニング発生時
には、約 500ms 毎に順次表示されます。
第 5 桁の小数点はサーボ ON を表します。
点灯:サーボ ON
消灯:サーボ OFF
MODE
UP
DOWN S E T
6-2
6-1 表示パネル部の操作
1
2
3
パネル表示の階層
表示パネルの表示階層は以下のようになります。
アラーム発生時は、どのモードにいてもアラームモードに移行し発生しているアラームのアラームコ
ードを表示します。また、アラーム発生時も別のモードに移行し、パラメータの確認、変更を行うこ
とができます。
4
UP または
DOWN
UP または
DOWN
MODE UP DOWNS E T
MODE
5
MODE
各モードの詳細
アラームモード
UP または
DOWN
UP または
DOWN
6
MODE UP DOWN S E T
パネル表示と操作
MODE
MODE
調整モード 1
7
8
各モードの詳細
状態表示モード
UP または
DOWN
MODE
各モードの詳細
MODE
調整モード 2
UP または
DOWN
MODE
9
各モードの詳細
MODE
調整モード 3
注:調整モード 3 のパラメータは変更しないでください。
10
MODE
MODE
システムパラメータモード 3(機能拡張信号)
UP または
DOWN
11
MODE
各モードの詳細
MODE
システムパラメータモード 4(機能拡張信号)
付
UP または
DOWN
MODE
MODE
各モードの詳細
テストモード
UP または
DOWN
MODE UP DOWN S E T
MODE
MODE
6-3
各モードの詳細
UP または
DOWN
6-1 表示パネル部の操作
1
状態表示モードの操作概要
状態表示モードでの操作の概要は以下のようになります。
2
ボタンは、誤動作回避のため、0.1s 以上、1s 以下押されていた場合有効と判断します。
※表示データの内容詳細は、第7章をご参照ください。
MODE
MODE
MODE UP DOWNS E T
MODE UP DOWNS E T
3
調整モード 1
アラームモード
状態表示モード
MODE
MODE UP DOWN UP
UP
4
5
DOWN
パネル表示と操作
6
MODE UP DOWNS E T
DOWN
7
UP
状態データを表示
8
SET
MODE UP DOWNS E T
DOWN
UP
MODE UP DOWNS E T
UP
9
DOWN
10
MODE UP DOWNS E T
DOWN
11
UP
付
MODE UP DOWNS E T
UP
6-4
6-1 表示パネル部の操作
1
2
3
アラームモードの操作概要
アラームモードでの操作の概要は以下のようになります。
ボタンは、誤動作回避のため、0.1s 以上、1s 以下押されていた場合有効と判断します。
※アラーム内容の概要は P7-8をご参照ください。
※アラーム内容の詳細は第11章トラブルシューティングをご参照ください。
4
MODE
MOD UP DOWS E T
5
調整モード 1
アラームモード
状態表示モード
MODE
MODE
MODE UP DOWN S E T
MODE
UP DOWN
UP
UP
DOWN
パネル表示と操作
6
MODE UP DOWN S E T
7
8
DOWN
UP
総稼動時間
アラーム履歴(最新)
SET
9
MODE UP DOWN S E T
MODE UP DOWN S E T
アラームコード No.
DOWN
10
UP
UP
DOWN
アラーム履歴(2 番目)
11
MODE UP DOWN S E T
付
DOWN
UP
MODE UP DOWN S E T
UP
6-5
アラーム履歴をクリアできます。
詳細は「アラーム履歴クリア」(P7-10)を
参照してください。
6-1 表示パネル部の操作
1
調整モードの操作概要
調整モードでの操作の概要は以下のようになります。
ボタンは、誤動作回避のため、0.1s 以上、1s 以下押されていた場合有効と判断します。
※調整モードの詳細は、調整モード(P7-11)をご参照ください。
調整モード 1
調整モード 2
DOWN
MODE UP DOWN SET
UP
UP
AJ20~39
AJ00~19
4
MODE
MODE
MODE UP DOWN SET
UP
3
調整モード 3
MODE
MODE UP DOWN SET
2
5
AJ40~59
パネル表示と操作
6
MODE UP DOWN SET
7
UP
DOWN
設定値
MODE UP DOWN SET
UP
DOWN
8
設定方法は次頁を
参照ください。
SET
9
MODE UP DOWN SET
UP
DOWN
10
11
MODE UP DOWN SET
DOWN
UP
付
MODE UP DOWN SET
UP
6-6
6-1 表示パネル部の操作
1
設定値の変更方法
[SET]ボタンを押し、点滅が終了する前(約1秒以下)
に離すと変更された値はキャンセルされます。
2
3
パラメータの設定値
4
MODE UP DOWN S E T
or
MODE UP DOWN S E T
パラメータの設定値が表示
されている状態で、[SET]
ボタンを押すと設定値が点
滅します。
5
6
DOWN
MODE UP DOWN S E T
[UP]または、
[DOWN]ボ
タンを押すと設定値が変更
されます。(連続押下で、高
速に変更できます)
SET
パネル表示と操作
[SET]ボタンを押し、点滅
が終了後(約 1 秒)に離すと
設定値が有効になります。
7
8
UP
SET
MODE UP DOWN S E T
9
10
11
付
6-7
6-1 表示パネル部の操作
1
システムパラメータモードの操作概要
システムパラメータモードでの操作の概要は以下のようになります。
ボタンは、誤動作回避のため、0.1s 以上、1s 以下押されていた場合有効と判断します。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
システムパラメータ 4
システムパラメータ 3
MODE
MODE
UP
DOWN S E T
UP
DOWN S E T
UP
UP
SP40~59
SP60~79
3
テストモード
MODE
MODE
2
4
MODE
MODE
UP
DOWN S E T
5
パネル表示と操作
6
DOWN
7
DOWN
8
UP
9
設定値
SET
MODE UP DOWN SET
DOWN
UP
MODE UP DOWN SET
UP
設定方法は次頁
を参照ください。
10
DOWN
11
付
MODE UP DOWN SET
DOWN
UP
MODE UP DOWN SET
UP
6-8
6-1 表示パネル部の操作
1
機能拡張信号の設定方法(SP**)
例)「SP40:CN9-CP3 出力信号設定」を 2 に変更する場合
2
3
MODE
4
UP
DOWN
SET
5
UP
or
SET
MODE UP DOWN S E T
6
MODE UP DOWN S E T
パネル表示と操作
パラメータの設定値が表示
されている状態で、[SET]
ボタンを押すと設定値が点
滅します。
7
8
[SET]ボタンを押し、点滅が終了する前(約1秒以下)
に離すと変更された値はキャンセルされます。
SET
DOWN
MODE UP DOWN S E T
[UP]または、
[DOWN]ボ
タンを押すと設定値が変更
されます。(連続押下で、高
速に変更できます)
SET
[SET]ボタンを押し、点滅
が終了後(約 1 秒)に離すと
設定値が有効になります。
MODE UP DOWN S E T
9
10
11
付
6-9
6-1 表示パネル部の操作
1
テストモードの操作概要
テストモードでの操作の概要は以下のようになります。
ボタンは、誤動作回避のため、0.1s 以上、1s 以下押されていた場合有効と判断します。
※テストモードの詳細は、第9章テストモードをご参照ください。
システムパラメータ 4
テストモード
MODE
MODE
UP
DOWN S E T
UP
3
状態表示モード
MODE
MODE
2
4
MODE
MODE UP DOWN SET
DOWN S E T
UP
5
DOWN
MODE
UP
DOWN
パネル表示と操作
6
DOWN S E T
7
UP
設定値
8
SET
MODE
UP
DOWN
DOWN S E T
MODE UP DOWN SET
UP
MODE
UP
DOWN
9
UP
10
DOWN
11
DOWN S E T
UP
付
MODE
UP
DOWN S E T
UP
6-10
6-1 表示パネル部の操作
1
2
3
4
5
パネル表示と操作
6
7
8
9
10
11
付
6-11
第
7章
状態表示モード・アラームモード・調整モード
ここでは、状態表示モード・アラームモードの表示内容の説明。調整モードで行う、サ
ーボループゲイン、各種判定基準値や速度制御時の加減速時間設定の操作や詳細内容を
説明します。
7-1
7-2
7-3
7-4
7-5
7-6
状態表示モード ································································· 7-1
状態表示モード詳細 ··························································· 7-3
アラームモード ································································· 7-8
アラーム内容一覧 ······························································ 7-9
調整モード ······································································ 7-11
調整モード詳細 ······························································· 7-12
7-1 状態表示モード
1
2
3
4
5
6
状態表示モード・アラームモード・調整モード
7
7-1
状態表示モード
状態表示モードは、ドライバに対する位置指令、モータ・エンコーダからの現在位置情報、偏差カウ
ンタの溜まりパルスの状態、入出力信号の状態、負荷状況、組み合わすべきアクチュエータのコード
番号などを表示します。これらは、異常時・故障時の診断に役立ちます。
状態表示モード一覧
電源投入時に正常であれば、「d00:モータ回転速度表示」が表示されます。(工場出荷時設定)
表示内容を変更する場合は「SP54:状態表示設定」
(P8-5)で表示内容を設定してください。
モード No.
名称
d00
モータ回転速度表示
d01
d02
偏差パルス数表示(下位)
偏差パルス数表示(上位)
8
d03
出力トルクモニタ
d04
過負荷率表示
d05
帰還パルス数表示(下位)
9
10
11
d06
帰還パルス数表示(上位)
d07
指令パルス数表示(下位)
付
内容
モータ軸の現在の回転速度を表示します。
アクチュエータ出力軸の回転速度は、表示
値をアクチュエータの減速比で除算して
得られます。
回転方向記号
無記号:正回転
- :逆回転
初期値
単位
詳細
--
r/min
--
位置制御時の偏差パルス数を表示します。
--
パルス
P7-3
--
%
--
--
%
--
--
パルス
P7-5
--
パルス
P7-5
アクチュエータが現在発生している出力
トルクの値を表示します。
アクチュエータ仕様で示す最大出力トル
クを 100%で表します。
トルク方向記号
無記号:正トルク(正回転方向へのトルク)
- :逆トルク(逆回転方向へのトルク)
アクチュエータに対する現在の過負荷の
状態を表示します。
エンコーダの帰還パルスを表示します。
アブソリュートエンコーダ:
エンコーダの現在値を表示
インクリメンタルエンコーダ:
電源が投入された時点もしくは原点復
帰完了時からの帰還パルス累積を 4 逓
倍した値
ドライバへの指令パルスを表示します。
アブソリュートエンコーダ:
電源投入時のエンコーダの現在値に指
令パルスを累積した値:
インクリメンタルエンコーダ
電源投入時もしくは原点復帰完了時を
「0」として、指令パルスを累積した値
d08
指令パルス数表示(上位)
d09
システム予約
--
--
--
--
d10
主回路電源電圧
--
V
--
d11
d12
システム予約
システム予約
適用アクチュエータコー
ド
整流後の主回路電源電圧を表示します
--アクチュエータのコード番号を表示しま
す。
---
---
---
--
--
P7-6
d13
7-1
7-1 状態表示モード
モード No.
名称
内容
現在の制御モードを表示します。
初期値
単位
詳細
1
--
--
--
2
--
h
--
--
%
P7-7
:位置制御
d14
制御モード
:速度制御
:トルク制御
d15
通電時間
d16
回生電力
(HA-800-24 のみ)
通電しているおおよその合計時間を表示
します。
0~99999
回生抵抗の吸収電力を比率で表していま
す。
3
4
5
6
状態表示モード・アラームモード・調整モード
7
8
9
10
11
付
7-2
7-2 状態表示モード詳細
1
2
3
4
5
7-2
状態表示モード詳細
ここでは、状態表示モードの詳細を説明します。
d01、02:偏差パルス数表示
位置制御時、CC-Link より指示された指令量と帰還パルスの偏差を表示します。d01 が下位 4 桁、d02
が上位 4 桁を表します。
ドライバはエンコーダよりフィードバックされた帰還パルスと、アクチュエータに出力した指令パル
スの差(偏差パルス)が無くなるまで回転指令を出力し続けます。
速度制御、トルク制御時の表示は「0」となります。
偏差パルス
CC-Link 指令
+
6
状態表示モード・アラームモード・調整モード
7
8
-
コマンド処理(パルス変換)
ドライバ
帰還パルス
d01 が下位 4 桁、d02 が上位 4 桁を表します。
表示例)
d01(下位)
9
10
MODE UP
DOWN S E T
「偏差パルス数」(4逓倍値)の下位4桁を表示
単位:パルス(例)=-10 パルス
11
関連項目
付
7-3
d05、d06、d07、d08
7-2 状態表示モード詳細
1
d04:過負荷率表示
アクチュエータに対する現在の過負荷の状態(単位:%)を表示します。
表示値が「50」になると、過負荷状態で動作していることを示すワーニング UA90 を出力し、表示値
が「100」となると、過負荷保護機能が働き、モータ電流を遮断すると同時に、
「AL20:過負荷」を表
示します。
サーボゲインを高くして位置決め時間を短くしようとしたとき、実際の動作後に、この過負荷率表示
の値が「0」のままであれば、高いサーボゲインで使用できます。
また、イナーシャが大きいシステムの場合でも、この過負荷率の表示が「0」のままであれば使用でき
ます。
逆に、過負荷率が徐々に増えていく場合は、サーボゲインを下げるなどの対策が必要です。
2
過負荷率の検出はアクチュエータ電流を常に監視しており、電流とその通電時間が下図のカーブを越
えたとき過負荷アラームを発生します。
例)
アクチュエータ許容連続電流の 1.2 倍以上の電流が長時間流れた場合
アクチュエータ許容連続電流の 3 倍の電流が約 2 秒間流れた場合
5
許容連続電流の 1.2 倍
1000
4
6
状態表示モード・アラームモード・調整モード
動作時間(s)
7
8
100
9
10
1
3
10
×1
許容連続電流
×2
×3
(最大電流)
11
アクチュエータ電流
付
7-4
7-2 状態表示モード詳細
1
2
3
4
d05、06:帰還パルス数表示
エンコーダからの帰還パルスを表示します。
アブソリュートエンコーダ:エンコーダの現在値を表示
インクリメンタルエンコーダ:電源が投入された時点もしくは原点復帰完了時からの帰還パルス累
積を 4 逓倍した値
d05 が下位 4 桁、d06 が上位 4 桁を表します。
表示例)
5
6
状態表示モード・アラームモード・調整モード
7
8
9
d06(上位)
d05(下位)
MODE UP
MODE UP
DOWN S E T
DOWN S E T
帰還パルス数:「19328930」を表示
表示範囲:0~±99999999
帰還パルス数が、8 桁から繰り上がり 9 桁以上になると最上位桁を無視し、下 8 桁のみを表示します。
d07、08:指令パルス数表示
CC-Link より指示され、ドライバ内部で発生した指令パルス値を表示します。
10
アブソリュートエンコーダ:電源投入時のエンコーダの現在値に指令パルスを累積した値
インクリメンタルエンコーダ:電源投入時もしくは原点復帰完了時を「0」として、指令パルスを
累積した値
11
d07 が下位 4 桁、d08 が上位 4 桁を表します。
表示例)
付
d08(上位)
d07(下位)
MODE UP
MODE UP
DOWN S E T
DOWN S E T
指令パルス数:「12345678」を表示
表示範囲:0~±99999999
指令パルス数が、8 桁から繰り上がり 9 桁以上になると最上位桁を無視し、下 8 桁のみを表示します。
関連項目
7-5
d01、d02、d05、d06
7-2 状態表示モード詳細
1
d13:適用アクチュエータコード
本ドライバに適用するアクチュエータをコード番号で表示します。
コード番号とアクチュエータの関係は下記表の通りです。
2
SHA シリーズのアクチュエータコード
エンコーダ
電圧仕様
減速比
200V
100V
1/11
1/51
アブソリュート
1/81
1/101
1/121
1/161
SHA20AxxxSG
-
5311
5321
5331
5341
5351
SHA25AxxxSG/HP
SHA32AxxxSG/HP
SHA40AxxxSG
SHA58AxxxSG
SHA65AxxxSG
SHA25AxxxSG
5801
5811
-
5011
5111
5211
5611
5021
5121
5221
5421
5521
5621
5031
5131
5231
5431
5531
5631
5041
5141
5241
5441
5541
5641
5051
5151
5251
5451
5551
5651
1/50
8311
8011
8111
8211
8611
アブソリュート
1/80
1/100
1/120
8321
8331
8341
8021
8031
8041
8121
8131
8141
8221
8231
8241
8621
8631
8641
電圧仕様
200V
100V
エンコーダ
減速比
SHA25AxxxCG-S
SHA32AxxxCG-S
SHA40AxxxCG-S
SHA25AxxxCG-S
1/50
8012
8112
8212
8612
4
5
6
1/160
8351
8051
8151
8251
8651
7
状態表示モード・アラームモード・調整モード
エンコーダ
電圧仕様
減速比
SHA20AxxxCG
SHA25AxxxCG
200V
SHA32AxxxCG
SHA40AxxxCG
100V
SHA25AxxxCG
3
8
出力軸 1 回転アブソリュート仕様
1/80
1/100
1/120
1/160
8022
8032
8042
8052
8122
8132
8142
8152
8222
8232
8242
8252
8622
8632
8642
8652
9
10
FHA-C、FHA-Cmini シリーズのアクチュエータコード
エンコーダ
電圧仕様
減速比
FHA-8C
FHA-11C
FHA-14C
200V
FHA-17C
FHA-25C
FHA-32C
FHA-40C
6204
6404
6604
-
6214
6414
6614
5217
5417
5617
5717
FHA-8C
FHA-11C
FHA-14C
FHA-17C
FHA-25C
FHA-32C
6304
6504
6704
-
6314
6514
6714
5117
5317
5517
100V
1/30
インクリメンタル
1/50
1/100
1/160
アブソリュート
1/50
1/100
1/160
6234
6434
6634
5237
5437
5637
5737
5247
5447
5647
5747
6201
6401
6601
5218
5418
5618
5718
6211
6411
6611
5238
5438
5638
5738
6231
6431
6631
5248
5448
5648
5748
6334
6534
6734
5137
5337
5537
5147
5347
5547
6301
6501
6701
5118
5318
5518
6311
6511
6711
5138
5338
5538
6331
6531
6731
5148
5348
5548
11
付
7-6
7-2 状態表示モード詳細
1
2
3
4
RSF シリーズのアクチュエータコード
エンコーダ
電圧仕様
減速比
RSF-17A
RSF-20A
200V
RSF-25A
RSF-32A
インクリメンタル
1/50
1/100
7365
7465
7575
7665
7375
7475
7575
7675
d16:回生電力(HA-800-24 のみ)
5
回生抵抗の吸収電力を比率(単位:%)で表します。
次の計算式により、抵抗の吸収電力に換算できます。
6
回生抵抗吸収電力[W] = 16000[W] ×
100[%]
※入力電圧、負荷条件、運転パターンにより、回生電力は変動します。実機における評価試験では、十分なマー
ジンを考慮してください。
※HA-800C-24 のみで有効な状態表示です。HA-800C-1, 3, 6 では回生抵抗の吸収電力に無関係です。
状態表示モード・アラームモード・調整モード
7
モニタ表示値[%]
8
9
10
11
付
7-7
7-3 アラームモード
7-3
1
アラームモード
アラームモードは、発生しているアラームおよびワーニング(警告)内容、および過去 8 回分のアラ
ーム履歴と発生時の総稼働時間を表示します。また、アラーム履歴のクリアもこのモードから行うこ
とができます。「アラームモード」では、次の内容を表示します。ただし、ワーニングはアラーム履歴
に記憶しません。
アラーム表示内容
A5
アラーム履歴 5 および発生時間
A6
アラーム履歴 6 および発生時間
A7
アラーム履歴 7 および発生時間
A8
アラーム履歴 8 および発生時間
AHcLr
アラーム履歴クリア
内容
発生しているアラーム・ワーニングを表示します。
アラーム履歴を、コード No で表示します。履歴を表
示しているときに、パネルの[SET]ボタンを押すと、
そのアラームが発生したときの本ドライバの総稼働時
間(単位:h)を表示します。
なお、総稼働時間はおおよその目安です。
詳細
P7-9
5
6
-
7
過去 8 回分のアラーム履歴をクリアします。
P7-10
状態表示モード・アラームモード・調整モード
名称
発生アラームワーニング表示
アラーム履歴 1 および発生時間
アラーム履歴 2 および発生時間
アラーム履歴 3 および発生時間
アラーム履歴 4 および発生時間
3
4
アラームモードで表示される内容は以下のようになります。
モード No.
AL
A1
A2
A3
A4
2
8
9
10
11
付
7-8
7-4 アラーム内容一覧
1
2
3
4
5
7-4
アラーム内容一覧
アラームおよびワーニング(警告)内容一覧を示します。
AL:発生アラームワーニング表示
ドライバが、出力しているアラーム・ワーニングのコード No を表示します。
複数のアラーム(ワーニング)を出力している場合は、すべてのアラーム(ワーニング)コードが約
500ms 間隔で表示されます。アラーム(ワーニング)が発生していない場合は、--と表示します。
アラーム(ワーニング)出力中でも、パネル操作によりアラームモード以外のモードに移行し、各種
パラメータや状態データを表示することができます。
アラームが発生していない時の表示
アラームが発生している時の表示
6
MODE
UP
MODE
DOWN S E T
状態表示モード・アラームモード・調整モード
7
8
9
10
11
付
UP
DOWN S E T
例)アラーム「偏差過大」が発生
していることを示します。
表示されるコード No とアラーム・ワーニングの関係は以下のようになります。
詳細は「11章トラブルシューティング」を参照してください。
アラーム
コード
コード
コード
アラーム
アラーム
アラーム
No
No
No
01
非常停止
47
パワー回路破損
73
FPGA 設定エラー
10
過速度
50
エンコーダ断線
76
プロセッサ異常
過負荷
エンコーダ受信異常*1*2
MEMORY エラー*3
20
51
80
*1
30
IPM エラー(過電流)
52
UVW 異常
81
システムダウン*3
*2
40
過電圧
53
システムダウン
82
1 回転データ異常*3
*2
41
回生抵抗過熱
多回転オーバーフロー
多回転データ異常*3
83
54
*4
*2
42
過回生
55
多回転データエラー
84
BUSY エラー*3
*4
43
欠相
60
偏差過大
85
過熱エラー*3
*4
44
メモリ異常(RAM)
制御電源低下
通信エラー*3
70
86
45
主回路電圧低下*4
71
メモリ異常(EEPROM)
46
ダイナミックブレーキ過熱*4
72
FPGA コンフィグエラー
*1:インクリメンタルエンコーダ使用時のみ表示
*2:13bit アブソリュートエンコーダ使用時のみ表示
*3:17bit アブソリュートエンコーダ(17bit エンコーダインクリメンタル仕様を含む)使用時のみ表示
*4:HA-800C-24 のみ表示
ワーニング(警告)
コード
No
90
91
92
7-9
アラーム
過負荷状態
バッテリ電圧低下
冷却ファン停止
コード
No
93
97
98
アラーム
主回路電圧低下
正転禁止入力中
逆転禁止入力中
コード
No
99
アラーム
接続アクチュエータ違い
7-4 アラーム内容一覧
1
AHcLr:アラーム履歴クリア
ドライバが記憶している、過去 8 回のアラーム履歴をクリアします。
1
2
「AHcLr」と表示されている状態で、[SET]ボタンを押します。
3
「AHcLr」が点滅します。
2
再度[SET]ボタンを押します。
アラーム履歴がクリアされ「AHcLr」が点滅から点灯に変わります。
アラーム履歴クリアを実行しない場合は、[UP]または、[DOWN]ボタンを押すと、アラーム
履歴クリア作業を中止し、
「A8」か「AL」の内容が表示されます。
4
5
6
状態表示モード・アラームモード・調整モード
7
8
9
10
11
付
7-10
7-5 調整モード
1
2
7-5
調整モード
アクチュエータ動作に関係するパラメータの読み出し、および変更をすることができます。
変更できる内容は以下のようになります。
3
モード
4
5
調整モード1
6
状態表示モード・アラームモード・調整モード
7
8
9
調整モード2
10
11
調整モード3
付
表示
パラメータ名称
工場出荷値
参照
AJ00
AJ01
AJ02
AJ03
j03
AJ04
位置ループゲイン
速度ループゲイン
速度ループ積分補償
フィードフォワードゲイン
位置決め完了範囲
速度到達判定値
トルク到達判定値
零速度判定値
システム予約 *3
システム予約 *3
システム予約 *3
トルク制限値
加減速時定数
システム予約 *3
システム予約 *3
システム予約 *3
速度モニタオフセット
電流モニタオフセット
システム予約 *3
システム予約 *3
フィードフォワードフィルタ
負荷慣性モーメント比
トルク定数補正係数
ばね定数補正係数
位置決め時自動ゲイン
*1
*1
*1
0
10
2000
50
10
-
-
-
100
1
-
-
-
*2
*2
-
-
1
100
100
100
0
P7-12
P7-12
P7-13
P7-13
P7-13
P7-14
P7-14
P7-14
-
-
-
P7-14
P7-15
-
-
-
P7-15
P7-16
-
-
P7-16
P7-16
P7-17
P7-17
P7-17
AJ05
AJ06
AJ07
AJ08
AJ09
AJ10
AJ11
AJ12
AJ13
AJ14
AJ15
AJ16
AJ17
AJ18
AJ19
AJ20
AJ21
AJ22
AJ23
AJ24
AJ25~39
システム予約
*3
-
-
AJ40~59
システム予約 *3
-
-
*1:適用アクチュエータによって異なります。
「付録:出荷時設定」
(付-1)の対象となる適用アクチュ
エータの値を参照してください。
*2:ドライバによって異なります。
*3:システム予約領域となっているパラメータは変更しないでください。システム予約は工場出荷時の
設定が個体・バージョンによりことなる場合があります。異なる個体間においてパラメータ転送を
行い設定値が変化しても製品機能に影響はありません。
通信ソフト PSF-800 にてバックアップ保存したパラメータファイルとデータ比較を行う場合、ま
た、バックアップ保存したパラメータファイルをドライバへ書き込む場合は、「10-4.設定値の保
存・比較・コピー」を参照してください。
7-11
7-6 調整モード詳細
7-6
調整モード詳細
1
ここでは、調整モードの設定の詳細を説明します。
2
AJ00:位置ループゲイン
3
位置フィードバックループの比例ゲインを調整します。
設定値とアクチュエータの動作には、次の関係があります。
高い設定値:位置偏差が少なく、指令に対し良い追従性ですが、高すぎると、サーボ系が不安定で
振動(ハンチング)しやすくなります。
低い設定値:低すぎると、指令に対し追従性が悪くなります。
振動(ハンチング)がなく、オーバーシュートが少ない状態で、最大のゲインを設定します。
サーボゲインを高くして位置決め時間を短くしようとしたとき、実際の動作後に、状態表示モードの
「d04:過負荷率表示」の値が「0」のままであれば、高いサーボゲインで使用できます。
設定値
機能
単位
初期値
位置フィードバックループの比例ゲイ
*
10~9999
-
ンを設定します。
関連項目
AJ01、AJ02、AJ03、d04
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
5
6
状態表示モード・アラームモード・調整モード
7
8
AJ01:速度ループゲイン
9
速度フィードバックループの比例ゲインを調整します。
設定値とアクチュエータの動作には、次の関係があります。
高い設定値:サーボ剛性が高く、応答性も良いですが、高すぎるとサーボ系が不安定で振動(ハン
チング)、オーバーシュートしやすくなります。
低い設定値:低すぎると、応答性、追従性が悪くなります。
オーバーシュート
速度
4
10
11
付
最適
時間
設定値
機能
単位
初期値
HA-800C-1:0.1~999.9
速度フィードバックループの比例
*
-
HA-800C-1 以外:1~9999 ゲインを設定します。
関連項目
AJ00、AJ02、AJ03
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
7-12
7-6 調整モード詳細
1
2
3
4
5
6
状態表示モード・アラームモード・調整モード
7
AJ02:速度ループ積分補償
負荷変動による速度の変動を少なくするときに設定します。
設定値とアクチュエータの動作には、次の関係があります。
高い設定値:振動(ハンチング)がなく、負荷変動時に応答が遅くなります。
低い設定値:負荷変動時の応答は速くなりますが、低すぎると、振動(ハンチング)が発生します。
設定値
機能
単位
初期値
*
1~9999
速度ループ積分補償値を設定します。
-
関連項目
AJ00、AJ01、AJ03
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
AJ03:フィードフォワードゲイン
指令に対し遅れを少なくするフィードフォワード制御を行うときに設定します。フィードフォワード
制御を行わない場合は“0”とします。
設定値とアクチュエータの動作には、次の関係があります。
高い設定値:機械的なショックや振動(ハンチング)が発生しやすくなります。
設定値
8
0~100
関連項目
機能
単位
フィードフォワードゲインを設定しま
-
す。
AJ20、AJ21、AJ22、AJ23、SP69
初期値
0
9
10
11
付
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
AJ04:位置決め完了範囲
位置制御で動作中に、RXn1:動作完了が 1 になる条件を設定します。
HA-800C 内部で指令出力終了後、偏差パルス(指令-帰還パルス)が、+位置決め完了範囲~-位置
決め完了範囲の間にある場合に、RXn1:動作完了が 1 になります。
※ AJ04 の設定値は、エンコーダパルス単位となります。
設定値
機能
単位
初期値
位置決め完了出力信号を出力する範囲
*
0~9999
パルス
を設定します。
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
7-13
7-6 調整モード詳細
1
AJ05:速度到達判定値
アクチュエータのモータ軸の回転速度が、この設定値以上になった時、RX(n+2)6:速度到達判定値が
1 になります。(RX(n+2)6:速度到達判定値は、2 局占有で使用した場合のみ有効です)
設定値
1~9999
機能
速度到達判定値を設定します。
単位
r/min
初期値
2000
3
AJ06:トルク到達判定値
アクチュエータの出力トルクが、この設定値以上になった時、RX(n+2)7:トルク到達判定値が 1 にな
ります。(RX(n+2)7:トルク到達判定値は、2 局占有で使用した場合のみ有効です)
設定値
1~100
機能
トルク到達判定値を設定します。
単位
%
初期値
50
単位
r/min
5
7
状態表示モード・アラームモード・調整モード
アクチュエータのモータ軸の回転速度が零速度判定値以下になったときに、RX(n+2)5:零速度出力 bit
が 1 になります。(RX(n+2)5:零速度出力は、2 局占有時のみ有効です)
機能
零速度判定値を設定します。
4
6
AJ07:零速度判定値
設定値
0~100
2
8
初期値
10
9
位置制御から他の制御モードに切り替える場合や、他の制御モードから位置制御に切
り替える場合は、零速度出力が出力されないと切り替えることができません。
11
AJ11:トルク制限値
位置制御および速度制御で動作時、RYn3:トルク制限を 1 にした時、
「トルク制限値」で設定された
値にトルクを制限します。
設定値
1~100
機能
トルク制限値を設定します。
10
単位
%
初期値
100
位置制御で動作時にトルク制限を行うと、「トルク制限値」の設定によっては、偏差パ
ルスが増え、トルク制限入力を解除した瞬間にアクチュエータの挙動が不安定になる
場合があります。位置制御での「トルク制限値」は、注意して設定してください。
7-14
付
7-6 調整モード詳細
1
2
3
4
5
6
AJ12:加減速時定数
「加減速時定数」には、モータの回転速度が[0 r/min]から適用アクチュエータの最高回転速度まで加速
する時間、およびモータの回転速度が適用アクチュエータの最高回転速度から[0 r/min]まで減速する時
間を設定します。
RWwn+4:速度指令に目標速度を設定して、RY(n+2)3:速度制御切替を 1 にすると、この設定に従い
加速を開始します。
RY(n+2)3:速度制御切替が 1 の状態で、RWwn+4:速度指令に設定された速度でアクチュエータが回
転している状態から、RWwn+4:速度指令を 0 に変更すると、この設定に従い減速停止します。
設定値
1~9999
機能
加減速時間を設定します。
単位
ms
初期値
1
(例)最高回転速度が 4000r/min のモータにおいて、AJ12=1000 と設定し、RWwn+4=2000 として、
RY(n+2)3=1 に設定した場合は 500ms で 2000r/min となります。
速度
←
状態表示モード・アラームモード・調整モード
7
4000
(r/min)
2000
8
9
1000
500
→t(ms)
10
11
付
「AJ12:加減速時定数」は速度制御でのみ使用可能です。
AJ16:速度モニタオフセット
CN9 に出力されている速度モニタ出力のオフセットを調整します。速度モニタオフセットは、当社出
荷時に調整済みですが、必要に応じて再調整してください。調整範囲「-2048~2047」で「-10V~+10V」
に相当します。
なお、このオフセット値は、パラメータ初期化では、初期化されず、値が保持されます。
設定値
機能
速度モニタ出力のオフセット値を設定しま
-2048~2047
す。
*:初期値はドライバによって異なります。
7-15
単位
初期値
-
*
7-6 調整モード詳細
1
AJ17:電流モニタオフセット
CN9 に出力されている電流モニタ出力のオフセットを調整します。電流モニタオフセットは、当社出
荷時に調整済みですが、必要に応じて再調整してください。調整範囲「-2048~2047」で「-10V~+10V」
に相当します。
なお、このオフセット値は、パラメータ初期化では、初期化されず、値が保持されます。
設定値
機能
電流モニタ出力のオフセット値を設定しま
-2048~2047
す。
*:初期値はドライバによって異なります。
単位
初期値
-
*
5
フィードフォワード制御を行う場合のフィルタ周波数を設定します。
設定値が高いほうが応答性が良くなりますが、高すぎると、機械的なショックや振動(ハンチング)
を発生しやすくなります。
6
7
初期値
1
状態表示モード・アラームモード・調整モード
機能
単位
Hz
フィルタ周波数を設定します。
AJ03、AJ21、AJ22、AJ23、SP69
3
4
AJ20:フィードフォワードフィルタ
設定値
1~2000
関連項目
2
8
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
10
AJ21:負荷慣性モーメント比
フィードフォワード制御を行う場合の自己慣性モーメントに対する負荷慣性モーメントの比率を設定
します。この設定値に基づきフィードフォワード制御を行います。
設定値
1~1000
関連項目
機能
単位
%
負荷慣性モーメントの比率を設定します。
AJ03、AJ20、AJ22、AJ23、SP69
9
初期値
100
11
付
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
7-16
7-6 調整モード詳細
1
2
3
4
AJ22:トルク定数補正係数
フィードフォワード制御を行う場合のアクチュエータのトルク定数のばらつきを補正します。この設
定値に基づきフィードフォワード制御を行います。
このパラメータは、基本的にはデフォルト(100)のまま変更する必要はありません。よりシビアに整定
時間を設定したい場合は、デフォルト±10 程度を目安に変更します。
設定値
1~200
関連項目
機能
単位
アクチュエータのトルク定数のばらつきを
%
補正します。
AJ03、AJ20、AJ21、AJ23、SP69
初期値
100
5
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
6
状態表示モード・アラームモード・調整モード
7
8
AJ23:ばね定数補正係数
フィードフォワード制御を行う場合のアクチュエータばね定数のばらつきを補正します。この設定値
に基づきフィードフォワード制御を行います。
このパラメータは、基本的にはデフォルト(100)のまま変更する必要はありません。よりシビアに整定
時間を設定したい場合は、デフォルト±10 程度を目安に変更します。
9
10
設定値
1~200
関連項目
11
機能
単位
アクチュエータのばね定数のばらつき(減速
%
機の加工誤差)を補正します。
AJ03、AJ20、AJ21、AJ22、SP69
初期値
100
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
付
AJ24:位置決め時自動ゲイン
「SP60:位置決め時自動ゲイン設定有効/無効」を「有効」にした場合に、設定されるゲインを調整
できます。
※ HA-800 ソフトウェアバージョン 2.04 以降で使用できます。
設定値
-50~100
関連項目
7-17
機能
位置決め時自動ゲインの増減値を設定しま
す。
SP60
単位
初期値
%
0
第
8章
システムパラメータモード
ここでは、入出力信号の論理設定法および機能拡張として電子ギヤ等設定の詳細を説明
します。
8-1
システムパラメータモード ·················································· 8-1
8-1 システムパラメータモード
1
8-1
2
ここでは、操作モード別に操作・表示できるパラメータを説明します。
設定できるパラメータは以下のようになります。
モード
3
システムパラメータ3(機能拡張)
4
5
6
7
システムパラメータ4(機能拡張)
システムパラメータモード
8
9
システムパラメータモード
10
11
付
表示
パラメータ
出荷時の標準設定値
SP40
SP41
SP42
SP43
SP44
SP45
SP46
SP47
SP48
SP49
SP50
SP51
SP52
SP53
SP54
SP55
SP56
CP3 出力信号設定
システム予約 *3
システム予約 *3
システム予約 *3
SP57
システム予約
*3
―
SP58
SP59
システム予約
*3
―
0
SP60
SP61
SP62
SP63
SP64
SP65
SP66
SP67
SP68
SP69
SP70
位置決め自動ゲイン有効/無効設定
エンコーダモニタ出力パルス数
SP71
システム予約
SP72~79
電子ギヤ分子
電子ギヤ分母
システム予約
システム予約
*3
*3
サーボ ON 時偏差クリア設定
許容位置偏差
指令極性
速度入力係数設定
システム予約 *3
トルク入力係数設定
状態表示設定
DB 有効/無効設定
システム予約 *3
角度補正有効/無効設定
00
―
―
―
1
1
―
―
1
*1
0
*1
―
100
d00
1
―
フィードフォワード制御機能設定
システム予約 *3
*1
*1
0
2
0
0
*4
0
0
*1
―
*3
―
システム予約 *3
―
入力信号論理設定
出力信号論理設定
回生抵抗選択(HA-800-24 のみ)
正転/逆転禁止時動作
アブソリュートエンコーダ機能設定
出力軸分割機能設定
電子ギヤ機能設定
*1: 適用アクチュエータによって異なります。付録 1「出荷時設定」の対象となる適用アクチュエータの値を参
照してください。
*2: システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで有効になります。
*3: システム予約領域となっているパラメータは変更しないでください。システム予約は工場出荷時の設定が個
体・バージョンによりことなる場合があります。異なる個体間においてパラメータ転送を行い設定値が変化
しても製品機能に影響はありません。
通信ソフト PSF-800 にてバックアップ保存したパラメータファイルとデータ比較を行う場合、また、バック
アップ保存したパラメータファイルをドライバへ書き込む場合は、「10-4.設定値の保存・比較・コピー」を
参照してください。
*4: HA-800C-*D;SP66=0、HA-800C-*E;SP66=1
8-1
8-1 システムパラメータモード
1
SP40:CN9-3 出力信号設定
CN9 の 3pin にモニタ出力する信号を設定します。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
内容
3
初期値
01
運転準備完了
02
アラーム出力
03
RXn1:動作完了出力
04
速度到達出力
05
トルク到達出力
06
零速度出力
07
システム予約
2
4
00
5
6
SP44~45:電子ギヤ設定
アクチュエータが駆動する機構の移動量と指令パルス数との関係を整数にしたいときなどに使用しま
す。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
7
本機能はインクリメンタルエンコーダでの設定機能となります。アブソリュートエン
コーダでは設定できません。
電 子 ギ ヤ を 変 更 し た 場 合 、 CC-Link 通 信 JOG 動 作 (RY(n+2)5) は 電 子 ギ ヤ 比
(SP44/SP45)倍に、また、ポイントテーブル動作、CC-Link 通信 JOG 動作、原点復帰
時の加減速時間は 1/電子ギヤ比倍されますので、設定にご注意ください。
9
=
負荷機構の減速比
× アクチュエータ分解能 ×
1
360
付
直線運動の場合
電子ギヤ分子 (SP44)
電子ギヤ分母 (SP45)
=
指令パルスあたり移動角度
負荷機構の送りピッチ
× アクチュエータ分解能
この式をベースに分子・分母の値が整数になるよう設定してください。
組合せエンコーダ=インクリメンタルエンコーダ
パラメータ No.
44
名称
電子ギヤ分子
設定値
1~9999
初期値
1
45
電子ギヤ分母
1~9999
1
組合せエンコーダ=アブソリュートエンコーダ
パラメータ No.
44
名称
電子ギヤ分子
設定値
1
初期値
1
45
電子ギヤ分母
1
1
システムパラメータモード
電子ギヤ分母 (SP45)
指令パルスあたり移動角度
10
11
回転動作の場合
電子ギヤ分子 (SP44)
8
8-2
8-1 システムパラメータモード
1
SP48:サーボON時偏差クリア設定
2
RYn0:サーボ ON 指令を 1 にした時点の偏差量を指令カウンタに加算し、偏差を 0 の状態でサーボ
ON することができます。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
3
設定値
4
0
機能
偏差が発生している状態で、サーボオンする
と偏差分だけ動作します。
1
偏差をゼロにしてサーボオンします。
初期値
1
5
設定値を“0”とした場合、RYn0:サーボ ON 指令が 0 の状態でも制御回路電源が入
力されており、重力・人力などの影響で負荷機構の停止位置が移動すると、位置の偏
差パルスが発生します。この状態でサーボオン入力をオンすると、この偏差パルス数
が 0 になるようアクチュエータが動作するため、偏差パルスが大きいと急激な動作に
より設備を破損する可能性があります。ご注意ください。
6
7
9
システムパラメータモード
8
10
11
付
SP49:許容位置偏差
位置偏差値の許容値を設定します。この設定値以上の偏差が発生すると、
「AL60:偏差過大」が発生し、
サーボオフします。
※ SP49 の設定値は、エンコーダパルス単位となります。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
単位
単位
初期値
1~9999
位置偏差値の許容値
×1000 パルス
*
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
SP50:指令極性
CC-Link 通信等から動作指令を与えた際のアクチュエータの回転方向、正転/逆転禁止信号や各種モ
ニタの極性等を含めたシステムの座標方向を反転させるかを設定します。
このパラメータは、ポイントテーブル動作、原点復帰動作等や、モニタに影響します。なお、PSF-800
や HA-800C パネル操作からのテスト運転などには影響しません。
※ HA-800 ソフトウェアバージョン 3.01 から使用できます。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
1
機能
座標方向を反転させない
座標方向を反転させる
以下に指令極性が影響する範囲を示します。
8-3
初期値
0
8-1 システムパラメータモード
○:SP50 の設定が影響する ×:SP50 の設定が影響しない
CC-Link 通信
動作データの移動量
表示パネル
○
T04:JOG 動作
PSF-800
×
JOG 動作
×
RXn4:正転ストロークエンド中
○
T09:オートチューニング
○
プログラム運転
×
RXn5:逆転ストロークエンド中
○
d00:モータ回転速度
×
オートチューニング
○
RYn4:正転ストロークエンド
○
d01,02:偏差パルス
×
状態表示 モータ回転速度
×
RYn5:逆転ストロークエンド
○
d03:トルク表示
×
状態表示 トルク
×
RY(n+2)6:JOG 回転方向
○
d05,06:帰還パルス
×
状態表示 帰還パルス
×
RWwn+4:速度指令
○
d07,08:指令パルス
×
状態表示 指令パルス
×
RWwn+5:トルク指令
○
状態表示 偏差パルス
×
モニタコード:指令パルス累積
○
波形モニタ フィードバック速度
×
パラメータ
モニタコード:帰還パルス累積
○
原点復帰方向
○
波形モニタ 指令速度
×
モニタコード:偏差パルス
モニタコード:アクチュエータ
1 回転内指令
モニタコード:出力トルクモニタ
○
仮想原点
○
波形モニタ 偏差パルス
×
○
バックラッシュ補正
○
ポイントテーブル編集/動作
○
モニタコード:モータ速度
モニタコード:ABS 位置読み出
し
モニタコード:アクチュエータ
1 回転内位置
モニタコード:帰還パルス累積
(指令パルス単位)
○
○
入力信号
○
-
PSF-680CL
-
○
○
出力信号
動作データの移動量
○
微調整ボタン CW
○
微調整ボタン CCW
○
×
原点復帰方向
○
アナログ速度モニタ
×
仮想原点
○
アナログ電流モニタ
×
バックラッシュ補正
○
SP51:速度入力係数設定
×
3
4
5
6
7
8
9
10
この値を使って、「CN9-1 速度モニタ出力」には次式の電圧が出力されます。
速度モニタ出力電圧(V) = 回転速度(r/min)
2
システムパラメータモード
エンコーダモニタ
1
10.0V
速度入力係数
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
11
付
設定値
機能
単位
初期値
1~モータの最大
速度入力係数を設定します。
r/min
*
回転速度
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
8-4
8-1 システムパラメータモード
1
SP53:トルク入力係数設定
この値を使って、「CN9-2 電流モニタ」には次式の電圧が出力されます。
2
アクチュエータ電流(A) = 電流モニタ出力電圧(V) ×
3
10.0V
出力電流 100% = 最大電流です。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
4
設定値
1~100
5
機能
トルク入力係数設定を設定します。
単位
%
初期値
100
SP54:状態表示設定
6
7
システムパラメータモード
8
9
トルク入力係数
10
11
付
制御電源が投入された後、表示パネルに表示する状態表示モードの内容を設定します。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
d00~d16
機能
表示する状態表示モード No.
(0~16)
※かっこ内は PSF-800 を使用する場合の設定値です。
初期値
d00
(0)
SP55:DB有効/無効設定
ダイナミックブレーキの有効/無効を設定します。
HA-800C-24 では、ダイナミックブレーキは主回路直流電圧に連動して動作します。SP55 設定により
動作を変更することはできません。HA-800C-24 では、SP55=1 の設定で使用してください。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
1
機能
無効
有効
初期値
1
SP59:角度補正有効/無効設定
FHA ミニシリーズ(FHA-8C/11C/14C)と組み合わせて使用する際の角度補正を設定します。
角度伝達誤差をあらかじめ解析し、その誤差を補正し、一方向位置決め精度を向上する機能です。
この機能により一方向位置決め精度が補正なしの値より約 30%向上します。(30%は保証値ではあり
ません。アクチュエータによって実際の向上の度合が異なります)
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
1
8-5
機能
補正しない
補正する
初期値
0
8-1 システムパラメータモード
1
SP60:位置決め時自動ゲイン有効/無効設定
FHA ミニシリーズ(FHA-8C/11C/14C)と、組み合わせて使用する場合、位置決め時に自動ゲイン設
定機能を使用できます。これは、位置決め時間を短縮するため、偏差パルス数が少ないときに速度ル
ープゲインを自動的に大きくする機能です。
位置ループの速度指令値は偏差パルス数に比例しているので、偏差パルス数が少ないときは位置決め
速度が遅くなります。このとき、速度ループゲインを高くして電流指令値を大きくすれば、応答性が
改善されます。
「AJ01:速度ループゲイン」に設定されている速度ループゲインのほうが自動設定値より大きい場合
には、
「AJ01:速度ループゲイン」の設定値を有効とします。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
機能
単位
7
設定値
機能
単位
初期値
1~8192 エンコーダモニタ出力端子に出力するパルス数
パルス
*
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
11
入力信号の論理を設定します。
システムパラメータ SP62 の各 bit が、4 つの入力に個別に対応しています。
※ 0~31 まで設定できますが、上位ビットは無視されます。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値(bit)
0
1
9
10
SP62:入力信号論理設定
偏差クリア
8
システムパラメータモード
17bit アブソリュートエンコーダとの組み合わせで、モータが 1 回転したときエンコーダモニタ出力端
子(CN2-13~19)に出力されるパルス数(逓倍なし)を設定します。
原点復帰を使用する場合は変更しないでください。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
原点信号
4
6
SP61:エンコーダモニタ出力パルス数
Bit2
3
5
初期値
設定しない
-
*
1
設定する
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
Bit3
2
Bit1
アラームクリア
機能
ノーマルオープン(A 接)
入力フォトカプラ ON にて、信号機能有効
ノーマルクローズ(B 接)
Bit0
非常停止
単位
初期値
―
0
入力フォトカプラ OFF にて、信号機能有効
※各ビットの 2 のべき乗値を合算した値を設定します。
8-6
付
8-1 システムパラメータモード
1
SP63:出力信号論理設定
出力信号の論理を設定します。
システムパラメータ SP63 の各 bit が、3 つの出力に個別に対応しています。
※ 0~15 まで設定できますが、上位ビットは無視されます。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
2
3
Bit2
4
原点復帰(認識)完了
設定値(bit)
5
0
1
6
アラーム出力
Bit0
運転準備完了
機能
ノーマルオープン(A 接)
単位
初期値
―
2
出力信号が有効のとき、トランジスタ ON
ノーマルクローズ(B 接)
出力信号が有効のとき、トランジスタ OFF
※各ビットの 2 のべき乗値を合算した値を設定します。
7
システムパラメータモード
8
9
Bit1
10
SP64:回生抵抗選択(HA-800-24 のみ)
HA-800C-24 にて、接続する回生抵抗に応じて設定をします。
弊社出荷状態では、設定値「0:内蔵回生抵抗を使用する」、および内蔵回生抵抗を使用する配線にな
っています。
※ 内蔵回生抵抗を使用する場合は、必ず設定値「0」としてください。
※ 回生電力が大きく外付け回生抵抗を使用する場合は、設定値「1」としてください。
※ 設定値「2」は設定をしないでください。(メンテナンス用です)
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
11
付
設定値
0
機能
内蔵回生抵抗使用
1
外付回生抵抗使用
2
設定禁止
単位
初期値
-
0
SP65:正転/逆転禁止時動作
位置制御および速度制御時に、正転または逆転禁止が入力された時の動作を設定します。
※ HA-800 ソフトウェアバージョン 2.03 から使用できます。
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
1
8-7
機能
禁止方向にトルクを発生しません。
サーボロックで停止します。
単位
初期値
-
0
8-1 システムパラメータモード
1
SP66:アブソリュートエンコーダ機能設定
17 ビットアブソリュートエンコーダを、インクリメンタルエンコーダとして使用することができます。
インクリメンタルエンコーダとして使用する場合、バックアップ用バッテリは不要です。
なお、17bit エンコーダインクリメンタル仕様のアクチュエータ(組合せドライバ:HA-800C-*E)に
対しても、バックアップ用バッテリを接続し、SP66=0 と設定すれば、17 ビットアブソリュートエン
コーダとして使用することができます。
※ HA-800 ソフトウェアバージョン 2.09 から使用できます。
※ システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
機能
アブソリュートエンコーダとして使用する
1
インクリメンタルエンコーダとして使用する
*:HA-800C-*D;SP66=0、HA-800C-*E;SP66=1
単位
初期値
-
*
出力軸 1 回転 3.6 万分割(分解能 0.01deg 相当)
2
出力軸 1 回転 36 万分割(分解能 0.001deg 相当)
3
出力軸 1 回転 360 万分割(分解能 0.0001deg 相当)
単位
初期値
-
0
7
8
システムパラメータモード
なお、設定を変更した場合には、原点セットの処理が必要となりますので、原点セットを実行する前
に変更してください。原点セットの詳細については、
「原点セット」(P4-8)を参照してください。
※ HA-800 ソフトウェアバージョン 3.01 から使用できます。
※ システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
1
4
6
SHA-CG シリーズと組み合わせて位置制御で使用する場合、アクチュエータの分解能を設定できます。
出力軸分割機能設定及び適用アクチュエータから、対応する電子ギヤ値を自動的に設定します。
出力軸分割機能設定が影響する動作指令、モニタ信号については、次ページの表を参照してください。
機能
「NP00:アクチュエータ分解能」に従う
3
5
SP67:出力軸分割機能設定
設定値
0
2
9
10
11
付
「SP67:出力軸分割機能設定」は動作指令の分解能を設定する機能であり、出力
軸での位置決め精度を保証するものではありません。出力軸での位置決め精度の詳
細に関しては、「AC サーボアクチュエータ SHA シリーズ技術資料」を参照してく
ださい。
上位装置での動作シーケンスを設定後、
「SP67:出力軸分割機能設定」を変更した
場合、変更前の動作とは移動量、速度、加減速時間が大きく変化しますので、動作
を行う前に必ず動作データ(ポイントテーブル)の設定を確認/修正して下さい。
原点復帰動作においても「SP67:出力軸分割機能設定」が機能しますので、原点
復帰速度、原点復帰加減速時間の設定は、注意してください。
8-8
8-1 システムパラメータモード
1
○:SP67 の設定が影響する ×:SP67 の設定が影響しない
CC-Link 通信
2
3
4
5
6
7
9
システムパラメータモード
8
10
11
付
表示パネル
PSF-800
動作データの移動量/速度
○
T04:JOG 動作
×
JOG 動作
×
RXn4:正転ストロークエンド中
×
T09:オートチューニング
RXn5:逆転ストロークエンド中
×
d00:モータ回転速度
×
プログラム運転
×
×
オートチューニング
×
RYn4:正転ストロークエンド
×
d01,02:偏差パルス
×
状態表示 モータ回転速度
×
RYn5:逆転ストロークエンド
×
d03:トルク表示
×
状態表示 トルク
×
RY(n+2)6:JOG 回転方向
×
d05,06:帰還パルス
×
状態表示 帰還パルス
×
RWwn+4:速度指令
×
d07,08:指令パルス
×
状態表示 指令パルス
×
RWwn+5:トルク指令
×
モニタコード:指令パルス累積
○
モニタコード:帰還パルス累積
○
原点復帰方向
×
波形モニタ 指令速度
×
モニタコード:偏差パルス
モニタコード:アクチュエータ
1 回転内指令*1
モニタコード:出力トルクモニタ
○
仮想原点
×
波形モニタ 偏差パルス
×
○
バックラッシュ補正*2
×
ポイントテーブル編集/動作
○
モニタコード:モータ速度
モニタコード:ABS 位置読み出
し
モニタコード:アクチュエータ
1 回転内位置*1
モニタコード:帰還パルス累積
(指令パルス単位)
×
パラメータ
状態表示 偏差パルス
×
波形モニタ フィードバック速度
×
×
入力信号
×
-
○
○
PSF-680CL*3
-
出力信号
動作データの移動量
○
微調整ボタン CW
×
エンコーダモニタ
×
微調整ボタン CCW
×
13bitABS 現在値データ出力
×
原点復帰方向
×
アナログ速度モニタ
×
仮想原点
×
アナログ電流モニタ
× バックラッシュ補正
×
*1: 出力軸分割機能の設定に応じて、「1 回転」に相当する分解能が変化するため、モニタ出力範囲が異なります。
詳細については、「付録-6 SHA-CG(-S)使用時の注意事項」(付-31)を参照してください。
*2: 出力軸分割機能有効時(SHA-CG シリーズで SP67=0 以外) は、バックラッシュ補正は機能しません。
*3: 出力軸分割機能有効時(SHA-CG シリーズで SP67=0 以外) は、PSF-680CL の微調整機能は使用することが
できません。
出力軸分割機能設定時電子ギヤ値
減速比
50
80
100
120
160
8-9
分子
8192
65536
16384
32768
131072
SP67=1
3.6 万分割
分母
分子/分母
45
182.0
225
291.3
45
364.1
75
436.9
225
582.5
分子
4096
32768
8192
16384
65536
SP67=2
36 万分割
分母
分子/分母
225
18.2
1125
29.1
225
36.4
375
43.7
1125
58.3
分子
2048
16384
4096
8192
32768
SP67=3
360 万分割
分母
分子/分母
1125
1.82
5625
2.91
1125
3.64
1875
4.37
5625
5.83
8-1 システムパラメータモード
1
SP68:電子ギヤ機能設定
CC-Link 通信による JOG 動作速度、各種加減速時定数に対して電子ギヤ設定の影響範囲を設定します。
電子ギヤ機能そのものを無効化する機能ではありません。本設定はインクリメンタルエンコーダ接続
時のみ影響します。
3
JOG 動作速度(RWwn+6)への影響
RWwn+6=1000
「S68=0」の場合
電子ギヤ=1/1 の場合、1000r/min で動作する。
電子ギヤ=4/1 の場合、4000r/min で動作する。
「S68=1」の場合
電子ギヤ=1/1 の場合、1000r/min で動作する。
電子ギヤ=4/1 の場合、1000r/min で動作する。
4
5
ポイントテーブル加減速時定数(8304h、8F01h~8F7Fh)
原点復帰加減速時定数(9205h)
JOG 動作加減速時定数(RWwn+7)
への影響
最高速度=6000r/min、加減速時定数=1000ms の場合
「S68=0」の場合
電子ギヤ=1/1 の場合、6000r/min まで 1000ms で加速する。
電子ギヤ=4/1 の場合、6000r/min まで 250ms で加速する。
「S68=1」の場合
電子ギヤ=1/1 の場合、6000r/min まで 1000ms で加速する。
電子ギヤ=4/1 の場合、6000r/min まで 1000ms で加速する。
6
7
1
機能
各種動作が電子ギヤ設定の影響を受ける
各種動作が電子ギヤ設定の影響を受けない
単位
初期値
-
0
システムパラメータモード
8
※HA-800 ソフトウェアバージョン 3.01 から使用できます。
※ システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
設定値
0
2
9
10
11
付
8-10
8-1 システムパラメータモード
1
SP69:フィードフォワード制御機能設定
2
位置制御時のフィードフォワード制御機能の構成を設定します。詳細については、
「サーボゲインの応
用調整機能」
(P3-17)を参照してください。
※ HA-800 ソフトウェアバージョン 2.09 から使用可能です。
※ システムパラメータ(SP00~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
3
4
設定値
0
5
6
機能
フィードフォワード制御(従来互換機能)
1
フィードフォワード制御
2
フィードフォワード制御簡易調整版(安定動作モード)
3
フィードフォワード制御簡易調整版(通常動作モード)
4
フィードフォワード制御簡易調整版(高速動作モード)
単位
初期値
-
*
5
フィードフォワード制御簡易調整版(手動調整モード)
*:初期値は適用アクチュエータによって異なります。「付録:出荷時設定」(付-1)を参照してください。
7
フィードフォワード制御機能を用いる場合には必ず、
「サーボゲインの応用調整機能」
(P3-17)を参照し、注意事項を理解した上でご使用ください。
9
システムパラメータモード
8
10
11
付
8-11
第
9章
テストモード
ここでは、ジョグによるオートチューニングや入出力信号のモニタや、出力信号の擬似
操作による装置の動作確認法等の詳細を説明します。
9-1
9-2
テストモード ···································································· 9-1
テストモード詳細 ······························································ 9-2
9-1 テストモード
1
2
9-1
テストモード
テストモードでは、入出力信号のモニタや JOG、オートチューニングなどを行うことができます。
またアクチュエータを駆動させることなく、上位コントローラの接続や動作状態の確認が出来ます。
3
モード
4
テストモード
5
6
7
8
9
テストモード
10
11
付
9-1
表示
内容
詳細
T00
入力出力信号モニタ
P9-2
T01
出力信号操作
P9-3
T02
JOG 速度設定
P9-4
T03
T04
T05
JOG 加減速時定数設定
JOG 動作
パラメータ初期化
P9-5
P9-6
P9-8
T06
システム予約
T07
システム予約
-
T08
多回転クリア
P9-9
T09
オートチューニング
P9-10
T10
オートチューニング移動量
P9-12
T11
オートチューニングレベル選択
P9-13
-
9-2 テストモード詳細
9-2
1
テストモード詳細
2
ここでは、テストモードの詳細を説明します。
T00:入出力信号モニタ
3
割付けられたピンの入出力の状態を反映してリアルタイムに表示します。
表示されているピンは機能が有効であることを示します。
1
4
第 3 桁が出力、第 5 桁が入力状態を表します。
点灯:ON
消灯:OFF
1 秒以上の長押しの場合、表示は切り替わりません。
MODE
5
UP DOWN S E T
SET
MODE
出力
入力
6
7
UP DOWN S E T
or DOWN
UP
[UP]または、
[DOWN]ボタン を押
すと、テストモードの番号表示に戻り
ます。
MODE
UP
DOWN S E T
9
テストモード
非常停止
運転準備完了
8
10
アラームクリア
アラーム
11
偏差クリア
原点復帰
完了
付
原点信号
9-2
9-2 テストモード詳細
1
2
T01:出力信号操作
出力信号を任意に ON/OFF することができます。
3
この操作では、実際に出力信号が出力されます。操作によって機器が動作することが
あるので、注意してください。また、上位コントローラからの指令で HA-800C が自動
運転中でも、操作ができますので、実際の操作のときは十分注意してください。
PSF-800 からの出力信号操作と同時には実行できません。
4
5
1
出力信号の操作が可能になります。
1 秒以上の長押しの場合、表示は切り替わりません。
6
7
8
[SET]ボタンを押します。
MODE
UP DOWN S E T
SET
2
[UP]ボタンで操作する信号を選択します。
MODE
3
9
UP DOWN S E T
UP
[DOWN]ボタンを押して、ON/OFF を切り替えます。
2 桁目に表示されている出力信号が、[DOWN]ボタンを
押すごとに、ON/OFF します。
ON
テストモード
OFF
10
DOWN
MODE
11
UP DOWN S E T
MODE
UP DOWN S E T
第 1 桁:表示はありません。
第1桁
第 2 桁:操作する出力信号の番号が表示されます。
[1]から[7]まで表示され、1 は運転準備完了、2
はアラーム、3 は原点復帰完了が操作可能である事を
示します。4~7 の操作対象はありません。
MODE UP
第 3 桁:”-”が表示されます。
第 4~5 桁:第 2 桁で選択された出力の状態を示します。
on:信号が ON(出力トランジスタが ON)
oF:信号が OFF(出力トランジスタが OFF)
付
4
9-3
[SET]ボタンを押すと、[T01]の表示に戻ります。
第5桁
DOWN S E T
9-2 テストモード詳細
1
T02:JOG速度設定
T04:JOG 動作時の速度を設定します。
単位は、r/min ですが、アクチュエータのモータ部の回転速度ですので、出力軸の回転速度は
“設定値÷ギヤ比”になります。
設定範囲:10~3000
単位:r/min
1
2
3
[SET]ボタンを押します。
JOG 速度設定値を表示されます。(単位:r/min)
1 秒以上の長押しの場合、表示は切り替わりません。
4
MODE
UP DOWN S E T
5
SET
2
設定値を変更するには、[SET]ボタンを 1 秒以下で押します。
6
設定値が点滅し、設定値変更が可能となります。
MODE
UP DOWN S E T
7
SET
3
設定値を変更します。
[DOWN]ボタンで小さく、[UP]ボタン大きくします。
MODE
UP
設定値を確定するには、設定値の点滅が終了するまで[SET]
ボタンを押します。
元の設定値に戻すには、押した[SET]ボタンを、設定値の点
滅が終了する前に離します(約 1 秒以下)
9
or DOWN
テストモード
4
8
UP DOWN S E T
10
MODE
UP DOWN S E T
11
付
この設定値は記憶されません。
HA-800C ドライバの電源を再投入すると、初期値 100 に戻ります。
速度設定は出来るだけ確認に必要な低速度に設定してください。
高速設定での思わぬ事故にご注意ください。
9-4
9-2 テストモード詳細
1
T03:JOG加減速時定数設定
3
T04:JOG 動作時の加減速時定数を設定します。
設定値は、アクチュエータの停止状態から、適用アクチュエータの最高速度をモータ軸に換算した速
度まで加速する時間及び、適用アクチュエータの最高速度をモータ軸に換算した速度から停止まで減
速する時間です。
設定範囲:1~9999
単位:ms
4
(例)最高回転速度が 4000r/min のモータにおいて、T02=2000、T03=4000 を設定し、JOG 動作を
行うと、T02 の速度まで、1 秒で加速し、T02 の速度から 1 秒で停止します。
2
モータ回転速度
←
5
6
7
4000
2000
(r/min)
8
9
テストモード
10
4
2
→t(s)
1
[SET]ボタンを押します。
MODE
UP DOWN S E T
SET
2
設定値を変更するには、[SET]ボタンを 1 秒以下で押します。
設定値が点滅し、設定値変更が可能となります。
11
MODE
UP DOWN S E T
付
SET
3
設定値を変更します。
[DOWN]ボタンで小さく、[UP]ボタンで大きくします。
MODE
UP
.
4
UP DOWN S E T
設定値を確定するには、設定値の点滅が終了するまで[SET]ボ
タンを押します。
元の設定値に戻すには、押した[SET]ボタンを、設定値の点
滅が終了する前に離します(約 1 秒以下)
9-5
MODE
or DOWN
UP DOWN S E T
9-2 テストモード詳細
1
この設定値は記憶されません。
HA-800C ドライバの電源を再投入すると、初期値 1 に戻ります。
2
T02:JOG 速度設定で、大きな速度を設定した場合は、この設定は出来る限り大きな
値を設定することを推奨します。
3
4
T04:JOG動作
上位の非常停止信号以外の入力信号に関係なくアクチュエータを動作させることができます。また、
JOG 動作中に入力信号を操作しても、無視されます。「T02:JOG 速度」
、「T03:JOG 加減速時間」
で設定されたデータで、アクチュエータの JOG 動作をおこないます。
警
告
● JOG 動作中は非常停止以外の入力信号の操作は、無視されます。また、RXn4:正
転ストロークエンド、RXn5:逆転ストロークエンドも無視して動作しますので、
周囲の状況によく注意して操作してください。
● 通信ソフトウェア PSF-800 によるテスト運転は、同時に行わないようにしてくだ
さい。動作が不安定になります。
● JOG 動作時には、トルク制限機能は無効になります。
1
7
8
9
10
11
アクチュエータサーボオフ状態で、
[SET]ボタンを押します。
アクチュエータがサーボオンし、JOG の動作方向を示す表示に
変わります。
1 秒以上の長押しの場合、表示は切り替わりません。
6
テストモード
RYn0:サーボ ON 指令の入力によりアクチュエータがサーボオンしている場合には
「JOG 動作」に入ることが出来ません。RYn0:サーボ ON 指令は 0 にしてください。
JOG 動作実施後は、上位装置の現在値と実際の機械位置にズレが生じますので、ご注
意ください。
5
MODE
付
UP DOWN S E T
SET
9-6
9-2 テストモード詳細
1
2
2
[UP]ボタンを押している間、アクチュエータは CW(アク
チュエータによって回転方向が異なります)に回転します。
[UP]ボタンを離すと停止します。
[DOWN]ボタンを押している間、アクチュエータは CCW
(アクチュエータによって回転方向が異なります)に回転し
ます。
[DOWN]ボタンを離すと停止します。
回転速度は「T02:JOG 速度」で設定された速度になります。
加速と減速時は「T03:JOG 加減速時間」で設定されたデー
タで行います。
3
4
5
MODE
UP DOWN S E T
[UP]ボタンを押すと CW に
表示が回転します
6
7
[UP]ボタンまたは[DOWN]ボタンを押して、アクチュエータ
を回転させます。
[ DOWN ] ボ タ ン を 押 す と
CCW に表示が回転します
3
終了するときは、[SET]ボタンを押します。
アクチュエータはサーボオフし、テストモード番号の表示になります。
1 秒以上の長押しの場合、表示は切り替わりません。
このとき、アクチュエータはサーボオフになっています。サーボオンにする場合は、RYn0 サ
ーボ ON 指令を 1 にしてください。
8
9
テストモード
10
11
付
9-7
9-2 テストモード詳細
1
T05:パラメータ初期化
調整モードパラメータ(AJ16、AJ17 を除く)、システムパラメータ、ネットワークパラメータを工場
出荷時の状態に戻します。
この操作は、サーボオフ状態で行ってください。また、初期化実行後は必ず HA-800C
ドライバの電源を再投入してください。
AJ16、AJ17 以外の全てのパラメータが初期化されます。必要なパラメータは初期化
前に設定値の保存をしてください。パラメータは「設定値の保存」に従い設定値を、
PC に保存及び読出しができます。
この操作により[調整パラメータ][システムパラメータ]
[ネットワークパラメータ]
が初期化されます。動作データ(ポイントデータ)は初期化されません。
1
MODE
4
5
7
UP DOWN S E T
SET
8
[SET]ボタンを押します。
MODE
9
UP DOWN S E T
テストモード
適用アクチュエータコードの表示が点滅します。
パラメータの初期化を中止する場合は、[UP]ボタンまたは
[DOWN]ボタンを押してください。テストモードの番号表
示に戻ります。
3
3
6
[SET]ボタンを押します。
HA-800C ドライバが、現在設定されている適用アクチュエータ
コードを表示します。
1 秒以上の長押しの場合、表示は切り替わりません。
2
2
SET
10
表示が点滅から点灯になるまで[SET]ボタンを押し続けた後、ボ
タンを離します。(約 1 秒以上)
パラメータが初期化され、テストモード番号表示になります。
表示が点滅から点灯になる前に[SET]ボタンを離すと、パ
ラメータが初期化されず、
適用アクチュエータコードを表示し
ます。
初期化完了後、HA-800C の電源を OFF する場合は、2~3 秒
後に OFF してください。
MODE
UP DOWN S E T
点灯に変わる前に離すとモー
タコード表示となり、パラメ
ータは初期化されません。
MODE
11
UP DOWN S E T
付
MODE
UP DOWN S E T
点滅が点灯に変った後、離す
とテストモード番号表示に
なりパラメータの初期化が
完了しています。
9-8
9-2 テストモード詳細
1
2
3
T08:多回転クリア
13bit アブソリュートエンコーダまたは 17bit アブソリュートエンコーダを搭載したアクチュエータと
組み合わせて使用する場合、エンコーダの多回転データのクリアを行います。
原点位置設定を行う時にも使用します。SHA シリーズまたは、FHA-C アブソリュートシステムの場合、
原点位置で多回転カウンタの値を「ゼロ」に設定する必要があります。
4
5
6
アクチュエータがサーボオン状態のときは、多回転クリアは実行できません。
多回転クリア後は、HA-800C ドライバの電源を再投入してください。
電源を再投入しないと、サーボオンできないため指令も受け付けられません。
1
手動 JOG 操作でアクチュエータを原点位置へ移動させます。
(原点位置設定時のみ)
2
テストモード
T08:多回転クリアを表示させます。
7
8
MODE
SET
3
[SET]ボタンを 0.1 秒以上押します。
”cLr”が表示されます。
9
テストモード
10
UP DOWN S E T
MODE
UP DOWN S E T
SET
4
[SET]ボタンを押します。
”cLr”の表示が点滅します。
多回転クリアを行わない場合は、[UP]または、
[DOWN]ボタンを押します。テストモードの番号
表示に戻ります。
11
MODE
UP DOWN S E T
SET
付
5
点滅が点灯になるまで、[SET]ボタンを押し続けます。
(約 5 秒以上)
多回転クリアが実行され、テストモード番号表示に
なります。
[SET]ボタンを押し続け、点滅が点灯になる前に、
[SET]ボタンを離すと(約 5 秒以下)離すと多回
転クリアは実行されず、”cLr”を表示します。
9-9
MODE
UP DOWN S E T
9-2 テストモード詳細
1
T09:オートチューニング
負荷を推定してサーボゲインを最適に設定するオートチューニングを実行します。
警
告
負荷の推定のために、アクチュエータが動作しますので、オートチューニング実行時
は、十分安全を確認してから行ってください。
デフォルトでは、モータ軸で CW 方向に 6000 度移動後、CCW 方向に 6000 度移動し
ます。対応アクチュエータの出力軸の回転角度は1/減速比となります。装置に移動
限界が設定されている場合などは、”T10:オートチューニング移動量“で移動量を変
更してください。
アクチュエータをサーボオン状態にしないとオートチューニングは実行されません。
正転ストロークエンド、逆転ストロークエンドを解除してからオートチューニングを
実行してください。
(サーボオン、ストロークエンドは RYn0、4、5 からの操作が必要
です。
)
オートチューニング実行時には、PSF-800 の波形モニタを実施しないでください。
オートチューニング実施後は、上位装置の現在値と実際の機械位置にズレが生じます
ので、ご注意ください。
1
2
MODE
UP DOWN S E T
MODE
DOWN S E T
アクチュエータは、正逆転動作を行い、負荷の推定を行いま
す。負荷の推定が終わると、“run”表示が、“FInSH”表示
に変わり、オートチューニングが完了します。
この表示のときに、
[UP]ボタンまたは[DOWN]ボタンを
押すと、テストモード番号表示に戻ります。
7
11
SET
[SET]ボタンを 0.1 秒以上押します。
“-A.c”表示が“run”表示となり、CW 方向に“T10:オート
チューニング移動量”で設定された移動量だけ動作します。そ
の後、CCW 方向に“T10:オートチューニング移動量”で設定
された移動量だけ動作します。
このとき、主回路電源が投入されていないか、アクチュエータ
が動作しない場合(サーボアラームが出力されいる場合)
は、”run”表示にならずに“-A.c”を表示したままとなります。
6
10
“-A.c”の表示が点滅します。
4
5
テストモード
[SET]ボタンを押します。
4
9
SET
“T09”表示の状態で、[SET]ボタンを押します。
“-A.c”が表示されます。
1 秒以上の長押しの場合、表示は切り替わりません。
3
3
8
RYn0 を 1 に設定します。
サーボオン状態にします。正転ストロークエンド、逆転ストロ
ークエンドが無い場合は、RYn4、RYn5 も 1 に設定します。
2
付
MODE
UP DOWN S E T
MODE
UP DOWN S E T
MODE
UP DOWN S E T
9-10
9-2 テストモード詳細
1
回転位置によって、負荷変動が大きい場合は、正確な負荷の推定ができない為、オー
トチューニングができません。マニュアルで調整してください。
2
3
4
5
6
7
8
9
テストモード
10
11
付
9-11
9-2 テストモード詳細
1
T10:オートチューニング移動量
オートチューニングを実行するときのモータの移動量を設定します。
設定範囲:1500°~6000°(アクチュエータの移動量は設定値/減速比となります)
単位角度(°)
2
1
3
“T10”表示の状態で、[SET]ボタンを押します。
オートチューニング移動量が表示されます。
1 秒以上の長押しの場合、表示は切り替わりません。
MODE
UP DOWN S E T
4
SET
2
5
[SET]ボタンを押します。
オートチューニング移動量が点滅します。
MODE
3
6
SET
[UP]または、[DOWN]ボタンを押して、オートチューニン
グ移動量を変更します。
設定値の単位は角度(°)で、設定範囲は 1500°~6000°で
す。
オートチューニングの負荷推定は、最大で±15%程度の誤差
があります。誤差を小さくするために、可能な限りオートチ
ューニング移動量を大きく設定してください。
7
MODE
UP DOWN S E T
UP
8
or DOWN
9
オートチューニング移動量の点滅が点灯に変わるまで、[SET]ボ
タンを押します。
設定値が有効になります。
設定値を無効にする場合は、表示が点滅から点灯に変わる前
に[SET]ボタンを離してください。
MODE
テストモード
4
UP DOWN S E T
10
UP DOWN S E T
11
付
MODE
UP DOWN S E T
点滅が点灯にドライバの状態表示、アラ
ーム表示、データ値等の確認ができま
す。
MODE
UP DOWN S E T
点滅が点灯に変わる前に、
[SET]ボ
タンを離すと設定値は無効になりま
す。
オートチューニング移動量の設定値は保存されません。HA-800C ドライバを再起動す
ると、設定値はデフォルト(6000°)になります。
9-12
9-2 テストモード詳細
1
2
3
T11:オートチューニングレベル選択
オートチューニング時のレベルを選択します。設定値が大きいほうが応答性が良くなりますが、装置
によっては振動的になる場合があります。
1
“T11”表示の状態で、[SET]ボタンを押します。
オートチューニングレベル選択が表示されます。
1 秒以上の長押しの場合、表示は切り替わりません。
MODE
UP DOWN S E T
4
5
SET
2
[SET]ボタンを押します。
オートチューニングレベル選択が点滅します。
MODE
UP DOWN S E T
6
7
SET
3
[UP]または、[DOWN]ボタンを押して、オートチューニング
レベルを変更します。
設定範囲は 1~5 です。
MODE
8
9
UP DOWN S E T
UP
4
or DOWN
オートチューニングレベル選択の点滅が点灯に変わるまで、
[SET]を押します。
テストモード
設定値が有効になります。
設定値を無効にする場合は、表示が点滅から点灯に変わる前
に[SET]ボタンを離してください。オートチューニングレ
ベル選択の設定値は保存されません。
10
MODE
UP DOWN S E T
MODE
UP DOWN S E T
11
付
MODE
UP DOWN S E T
点滅が点灯に変わるまで、
[SET]ボタンを押した後、
離すと設定値が有効になりま
す。
点滅が点灯に変わる前に、[SET]
ボタンを離すと設定値は無効にな
ります。
オートチューニングレベルの設定値は保存されません。HA-800C ドライバを再起動す
ると、設定値はデフォルト(3)になります。
9-13
第
10章
通信ソフトウェア
ここでは、パソコン用専用ソフトを用いることによる入出力信号の状態、回転速度等の
サーボ状態、オートチューニング、パラメータの設定、サーボ動作波形モニタ等の操作
法を説明します。
10-1 概要·············································································· 10-1
10-2 オートチューニング ························································· 10-8
10-3 パラメータ設定 ······························································ 10-10
10-4 設定値の保存・比較・コピー ············································ 10-12
10-5 テスト運転 ···································································· 10-19
10-6 出力信号操作 ································································· 10-21
10-7 IO モニタ ······································································ 10-22
10-8 波形モニタ ···································································· 10-23
10-9 アラーム ······································································· 10-25
10-10 ポイントテーブル編集・動作 ··········································· 10-26
10-1 概要
1
2
3
4
5
6
7
8
9
10-1 概要
PSF-800 は、PC からドライバのパラメータの変更や動作波形モニタ等が可能な通信ソフトウェアです。
必要な環境
PSF-800 が正しく動作するためには、以下の環境が整っている必要があります。
以下の環境以外では、正しく動作しない可能性がありますので、必ず以下の環境下でご使用ください。
対象
コンピュータ本体
環境
Windows® Xp, Windows Vista®*1, Windows® 7*1 が動作するパソコンで、RS-232C
通信ポート又は USB※ポートが内蔵されていること。
OS
Windows® Xp, Windows Vista®*1, Windows® 7*1
メモリ
それぞれの OS が必要としている以上のメモリ容量
ハードディスク
3MB以上の空き容量
(作成したデータを保存する場合は、別途空き容量が必要です)
ディスプレイ
256 色以上
その他
・Microsoft® Mouse、Microsoft® IntelliMouse®または、互換性のあるポインティングデバ
イス
・作成したデータを印刷する場合は、指定の OS の下で動作するプリンタ
*1: Windows Vista®, Windows® 7 上で正常動作することを確認しておりますが、動作を保証するものではあり
ません。
* Microsoft, Windows、および IntelliMouse は、米国 Microsoft Corporation の、米国、日本およびその他の国
における登録商標または商標です。
* Windows の正式名称は、Microsoft Windows Operating System です。
PSF-800 は弊社ホームページから常に最新版をダウンロードしてご使用ください。
通信ソフトウェア
10
11
付
セットアップ
1
PSF-800 をダウンロードします。
弊社ホームページ(http://www.hds.co.jp)からダウンロードしてください。
2
インストールします。
ダウンロードしたファイルを解凍し、SETUP.EXE を実行して画面の指示に従ってセットアップ
を行ってください。
USB ポートを使用する場合
USB ポートを使用する場合は、USB ポートを RS-232C に変換するアダプタが必要です。
(USB-RSAQ5 IO データ等)
パソコンに内蔵されている RS-232C ポートは、通常 COM1 に割り付けられますが、USB から
の変換アダプタを使用する場合は割付が変わりますので、以下の設定を行ってください。
①コントロールパネルから、システムを開き、デバイスマネージャを表示します。
10-1
10-1 概要
1
②ポート(COM と LPT1)内容を確認する。
(下記の場合は、COM6 に割り付けられています)
2
3
4
5
6
7
③メニューのシステム(S)-COM ポートの設定を開きます。
8
②で確認したポート番号を設定し OK ボタンをクリックします。次に PSF-800 を起動した場合は、
直前に設定した COM ポート番号が有効になります。
④PSF-800 の動作には VB6 ランタイムライブラリが必要です。
10
通信ソフトウェア
VB6 ランタイムライブラリがインストールされていないパソコンの場合は次のようなメッセー
ジが表示されます。なお、ホームページからダウンロードしたファイルには、VB6 ランタイムラ
イブラリは含まれておりません。
9
11
付
VB6 ランタイムライブラリがインストールされていない場合は、以下の URL からダウンロードで
きます。
http://www.vector.co.jp/soft/win95/util/se188840.html
3
インストールの確認
インストールが完了したら、専用の通信ケーブル*を使用して、パソコンと HA-800C を接続しま
す。PSF-800 の起動と、終了を行い、正常にインストールが完了したことを確認します。
PSF-800 の起動は、HA-800 の制御回路電源を投入後に行ってください。
接続が不安定な場合にはトロイダルコアを使用してください。
*:専用通信ケーブルについて
RS-232C 用通信ケーブル:EWA-RS03
10-2
10-1 概要
1
ソフトの削除
2
PSF-800 をハードディスクから削除する場合は、以下の手順に従って行います。一度削除すると、そ
のパソコンから、PSF-800 を起動することはできません。再度起動する場合は、インストール手順に
従って、インストールを行ってください。
3
1
コントロールパネルを立ち上げます。
2
「プログラムの追加と削除」をクリックします。
3
プログラムを選択し削除します。
4
5
6
7
8
9
通信ソフトウェア
10
11
付
PSF-800 を選択して、「変更と削除」ボタンをクリックすると、PSF-800 を、ハードディスクか
ら削除します。
10-3
10-1 概要
1
起動画面
2
PSF-800 の起動画面は以下のようになります。
サーボオン表示
モータコード表示
メニュー
接続機種名
VerNo 表示
動作制御モード表示
3
4
運転中表示
5
アラーム表示
6
「状態表示」
ウインドウ
7
8
9
「オート
チューニング」
ウインドウ
11
「パラメータ設定」
ウインドウ
「アラーム表示」
ウインドウ
「テスト運転」
ウインドウ
「I/O モニタ」
ウインドウ
通信ソフトウェア
10
「出力信号操作」
ウインドウ
「動作波形モニタ」
ウインドウ
10-4
付
10-1 概要
1
2
3
メニュー
ファイル
開く・・・パラメータ設定、テスト運転及び波形モニタ操作で、それぞれパラメータ設定値、
テスト運転パターン及び、波形モニタデータをファイルから読み出します。
名前をつけて保存・・・パラメータ設定、テスト運転及び波形モニタ操作で、パラメータ設定値、
テスト運転パターン及び、波形モニタデータをファイルに保存します。
終了・・・プログラムを終了します。
軸
4
PSF-800 を HA-800C と接続する場合、PC と HA-800C の 1 対 1 の接続となります。
PSF-800 と通信をする場合は、局番設定スイッチを「70」、
「90」以外とします。
(PSF-680CL と接続する場合は、局番設定スイッチを「70」とします。
5
PSF-800 と、HA-800C の接続例
表示部
6
7
局番設定スイッチ
設定内容
1~64
70
押し釦スイッチ
90
波形モニタ用コネクタ
ディップスイッチ
モード
CC-Link 通信を行います。
PSF-680CL との通信を行います。
動作データ(ポイントテーブル)を
クリアします。
LRUN LED
8
ロータリースイッチ
局番設定スイッチ
SD LED
RD LED
LERR LED
9
通信ソフトウェア
10
11
マスター装置
(PC)
付
RS-232C
PC-ドライバ間
専用通信ケーブル
・型番:EWA-RS03(別売品)
ウィンドウ
起動時に状態表示画面が立ち上がっていますが、状態表示画面以外を立ち上げて操作を行いたい
場合は、ウィンドウメニューから選択が可能です。
10-5
10-1 概要
1
詳細表示部
軸 No 表示
HA-800C と PSF-800 を接続する場合は、軸 00 以外を選択すると通信できません。デフォルト
(工場出荷時)の設定で使用してください。
2
運転中表示
HA-800 と PSF-800 が接続され、HA-800 の電源が投入されているときに、緑色に点灯します。
(緑)
HA-800 電源 ON
(消灯)
4
HA-800 電源 OFF
あるいは PSF-800 が
オフライン
5
アラーム表示
HA-800 がアラーム状態のときに、赤色に点滅します。
(赤)
6
(消灯)
アラーム発生無し
アラーム発生中
7
サーボオン表示
アクチュエータがサーボ ON している場合は、赤色に点灯します。
(赤)
サーボ ON 中
3
8
(消灯)
サーボ OFF 中
9
接続機種名表示
接続されている HA-800 の機種名を表示します。
10
通信ソフトウェア
(例:汎用(位置指令、速度指令、トルク指令)仕様の場合)
HA-800B:MECHATROLINK 通信仕様
HA-800C:CC-Link 仕様
11
VerNo 表示
接続されている HA-800 のソフトウェアバージョンを表示します。
付
モータコード表示
HA-800 に設定されている適用アクチュエータのコード No を表示します。
動作制御モード表示
HA-800 の動作モードを表示します。動作しているモードが緑色に点灯します。
例:位置制御で動作している場合
(緑)
(消灯)
(消灯)
10-6
10-1 概要
1
2
状態表示
「状態表示」ウインドウでは、動作状態や数値をモニタすることができます。
3
4
5
6
動作状態表示
名称
S-ON
IN-POS
7
Hi-SPD
8
Low-SPD
Hi-TRQ
9
通信ソフトウェア
10
FWD-LMT
REV-LMT
SPD-LMT
TRQ-LMT
説明
アクチュエータがサーボ ON している場合、ON の表示になります。
位置制御時、偏差カウンタが調整パラメータの位置決め完了範囲内の場合、ON の表
示になります。
モータの速度が調整パラメータの速度到達値以上になった場合、ON の表示になりま
す。
モータの速度が調整パラメータの零速度判定値以下になった場合、ON の表示になり
ます。
トルク制御時、モータの出力トルクが調整パラメータのトルク到達値以上になった
場合、ON の表示になります。
正転禁止信号が有効な状態になった場合、ON の表示になります。
逆転禁止信号が有効な状態になった場合、ON の表示になります。
HA-800C では OFF となります。
ドライバの出力トルクがトルク制限中の場合、ON の表示になります。
数値モニタ
11
名称
モータ回転速度
トルク
ピークトルク
付
帰還パルス数
指令パルス数
偏差パルス数
過負荷率
主回路電源電圧
回生電力
説明
モータの回転速度[r/min]を表示します。
アクチュエータの最大出力トルクを 100%として現在のトルク値%を表示します。
アクチュエータの最大出力トルクを 100%として出力トルクのピーク値%を表示し
ます。
[ピークトルククリア]ボタンをクリックすると、クリアされます。
エンコーダからの帰還パルスカウンタの値を表示します。
ドライバの指令パルスカウンタの値を表示します。
指令パルスカウンタ - 帰還パルスカウンタの値(偏差)を表示します。
過負荷率を表示します。この数値が 0 以外の場合は、アクチュエータが過負荷状態
で運転されています。
主回路の AC 電源を、整流した後の電圧[V]を表示します。
回生抵抗の吸収電力を比率(単位 0.01%)で表示します。
次の式より抵抗の吸収電力に換算できます。
表示値[0.01%]
回生抵抗吸収電力[W]= 16000[W]×
10000[0.01%]
例)表示値=10 の場合、抵抗吸収電力=16[W]
※ HA-800C-24 のみで有効な数値モニタです。HA-800C-1, 3, 6 では回生抵抗の吸
収電力に無関係です。
10-7
10-2 オートチューニング
1
10-2 オートチューニング
オートチューニングとはドライバが負荷を推定して、サーボゲインを適正な値に自動調整する機能で
す。ここでは、オートチューニングの方法を説明します。
警
告
負荷の推定のために、アクチュエータが動作しますので、オートチューニング実行時
は、十分安全を確認してから行ってください。
デフォルトでは、モータ軸で CW 方向に 6000 度移動後、CCW 方向に 6000 度移動し
ます。対応アクチュエータの出力軸の回転角度は1/減速比となります。装置に移動
限界が設定されている場合などは、”T10:オートチューニング移動量“で移動量を変
更してください。
オートチューニング実行時には、PSF-800 の波形モニタを実施しないでください。
オートチューニング実施後は、上位装置の現在値と実際の機械位置にズレが生じます
ので、ご注意ください。
1
2
3
4
5
6
7
「オートチューニング」ウインドウで、オートチューニング移動量とレベルを設定します。
8
1
9
3
通信ソフトウェア
10
11
設定値
オートチューニング移動量
レベル選択
説明
負荷推定時のモータ軸の移動角度量を設定します。アクチュエータ出力
軸の移動量は1/減速比となります。
1500~6000 度の値が設定可能です。可能な限り大きな値を設定すること
で負荷推定の精度が上がります。
オートチューニングのレベルを選択します。1~5 の値が設定可能です。
レベルが高くなるほど、サーボ剛性が高いチューニング結果となります。
2
RYn0,4,5 を 1 に設定します。正転禁止、逆転禁止を解除し、サーボオン状態にします。
3
[実行]ボタンをクリックします。
10-8
付
10-2 オートチューニング
1
4
アラートが表示されますので、問題なければ[OK]ボタンをクリックします。
オートチューニングが実行され、モータが回転します。オートチューニング中は、処理中画面が
表示されます。実行時は、機器の状況、周囲をよく確認してください。
2
3
4
4
5
オートチューニングが終わると、サーボゲインが表示されます。
オートチューニングの終了後、「位置ループゲイン」
、
「速度ループゲイン」
、「速度ループ積分」
が、推定した負荷に対して適切な値に変更されます。
5
6
回転位置によって負荷変動が大きい場合は、正確な負荷の推定ができない為、オート
チューニングができません。マニュアルで調整してください。
7
8
9
通信ソフトウェア
10
11
付
10-9
10-3 パラメータ設定
1
10-3 パラメータ設定
「パラメータ設定」ウインドウでは、調整モードパラメータやシステムパラメータの設定値を確認し
たり変更することができます。
3
10-3-1.ドライバ内部パラメータの編集・初期化
通信中のドライバ内部パラメータの設定値を編集する方法を説明します。
3
.
2
1
5
調整 1:調整モードパラメータ AJ00~AJ19 の設
定値確認、および変更が可能です。
調整 2:調整モードパラメータ AJ20~AJ39 の設
定値確認、および変更が可能です。
調整 3:システム予約です。
システム 3:システムパラメータ SP40~SP59 の設
定値確認、および変更が可能です。
システム 4:システムパラメータ SP60~SP79 の設
定値確認、および変更が可能です。
ネットワーク:CC-Link より実行される動作に関する
パラメータです。原点復帰法等の動作
の詳細を設定します。
1
4
「パラメータ設定」ウインドウを開きます。
6
7
通信ソフトウェア
10
11
変更したいパラメータの「現在値」欄をクリックして、変更したい値を入力します。
変更したパラメータが赤色反転して表示されます。
4
5
9
現在の設定値がドライバから読み込まれ、「サーボの値」と「現在値」に表示されます。
3
4
8
「パラメータ設定」ウインドウで、[サーボから読み込み]ボタンをクリックします。
2
2
ドライバ固有パラメータ(AJ16:速度モニタオフセット、AJ17:速度モニタオフセット)を書き
込む場合は、
「ドライバ固有パラメータを書き込む」にチェックを入れます。
[サーボに書き込む]ボタンをクリックします。
変更した設定値(「現在値」の内容)がドライバに転送されます。
「ドライバ固有パラメータを書き込む」にチェックを入れた場合は、確認画面が表示されます。
書き込みを実行する場合は[OK]ボタンをクリックします。書き込みを行わない場合は[キャ
ンセル]ボタンをクリックします。
※ 「サーボに書き込む」を実行後も「サーボの値」の表示は更新されません。
「サーボから読み込み」を実行することで、「サーボの値」が更新され、書込み後の最新の
ドライバ内部のパラメータ設定値が表示されます。
10-10
付
10-3 パラメータ設定
1
2
3
通信異常等により正常な書込みが実行出来ない場合、警告メッセージが表示されます。
再度、
「サーボに書き込む」を実行してください。
パラメータをデフォルトの状態(工場出荷時の値)に戻す手順
4
この操作は、サーボオフ状態で行ってください。また、初期化実行後は必ず HA-800C
ドライバの電源を再投入してください。
AJ16、AJ17 以外の全てのパラメータが初期化されます。必要なパラメータは初期化
前に設定値の保存をしてください。パラメータは「設定値の保存」に従い設定値を、
PC に保存及び読出しができます。
この操作により[調整パラメータ][システムパラメータ]
[ネットワークパラメータ]
が初期化されます。動作データ(ポイントデータ)は初期化されません。
5
6
7
5
8
[工場出荷時の設定]ボタンをクリックします。
確認画面が表示されます。初期化を実行する場合は[OK]ボタンをクリックします。初期化を
行わない場合は[キャンセル]ボタンをクリックします。
9
通信ソフトウェア
10
6
処理中画面が表示され、しばらくすると値が初期値に変更されます。
11
付
10-11
10-4 設定値の保存・比較・コピー
1
10-4 設定値の保存・比較・コピー
設定値を PC にバックアップする方法を説明します。
パラメータ設定、テスト運転及び、波形モニタの各ウィンドウにて、パラメータ設定値、テスト運転
パターン及び、波形モニタデータをファイルに保存します。各ウインドウの設定値を保存と読出しは、
各ウィンドウを開いた状態で実行してください。 パラメータウィンドウでの使用法を以下に記載し
ます。
ドライバ内部パラメータの設定値を PC にバックアップする方法を説明します。
5
保存手順
「パラメータ設定」ウインドウを開きます。
3
4
10-4-1.設定値の保存
1
2
(10-3-1 手順 1 と共通)
6
「パラメータ設定」ウィンドウの[サーボから読み込み]ボタンをクリックします。
現在の設定値がドライバから読み込まれ、「サーボの値」と「現在値」に表示されます。
7
8
9
通信ソフトウェア
10
11
付
10-12
10-4 設定値の保存・比較・コピー
1
2
ファイルメニューから、「名前をつけて保存」を選択します。
3
保存したいフォルダとファイル名を設定して、[保存]ボタンをクリックします。
2
3
4
5
6
7
8
9
通信ソフトウェア
10
11
付
「名前をつけて保存」を行う前に必ず「サーボからの読み込み」を行ってください。
この操作により保存されるパラメータは、
[調整 1][調整 2][調整 3][システム 3][システム 4][ネットワーク]です。
この操作では、HA-800C に設定されている「動作データ(ポイントテーブル)
」は保
存されません。「動作データ(ポイントテーブル)
」を保存する場合は、PSF-680CL ま
たは CC-Link コマンドを利用してデータ保存を行ってください。
(本書の付録 3,4 をご
参照ください)
10-13
10-4 設定値の保存・比較・コピー
1
10-4-2.保存済みの設定値ファイルの読出し
PC にバックアップ済みのパラメータ設定値ファイルを読み出す方法を説明します。
ドライバ接続中に設定値の比較やコピー、ドライバ非接続中にオフラインでの保存済み設定
値の確認が行えます。
2
3
読み出し手順
1「パラメータ設定」ウインドウを開きます。
4
ファイルメニューから、
「ファイルを開く」を選択します。
5
6
2
7
読み出したいファイル名を設定して、[開く]ボタンをクリックします。
保存済み設定ファイルの設定値が読み込まれ、
「現在値」に表示されます。
8
9
通信ソフトウェア
10
11
付
10-14
10-4 設定値の保存・比較・コピー
1
10-4-3.保存済み設定ファイルとドライバ内部の設定値の比較
PC にバックアップ済みのパラメータ設定値と、通信中のドライバ内部パラメータを比較
する方法を説明します。
2
3
比較手順
1
通信中のドライバ内部パラメータを読み出します。(10-3-1 手順 1 と共通手順)
「パラメータ設定」ウインドウを開きます。
4
5
6
「パラメータ設定」ウィンドウの[サーボから読み込み]ボタンをクリックします。
現在の設定値(通信中のドライバ内部のパラメータ)がドライバから読み込まれ、「サーボの値」
と「現在値」の欄に表示されます。
2
保存済み設定ファイルを読み出します。 (10-4-2 手順 1~2 と共通手順)
ファイルメニューから、「ファイルを開く」を選択します。
読み出したいファイル名を設定して、[開く]ボタンをクリックします。
保存済み設定ファイルの設定値が読み込まれ、
「現在値」の欄に表示されます。
保存済み設定ファイルの設定値と、通信中のドライバ内部のパラメータ設定値の相違部分が赤字
で表示されます。
7
調整 1(AJ00~AJ19)
8
現在値:
保存済み設定ファイルのパラメータ設定値
サーボの値:
通信中のドライバ内部のパ
ラメータ設定値
9
通信ソフトウェア
10
11
付
赤字:相違部分
10-15
10-4 設定値の保存・比較・コピー
3
1
タブを切り替えて、全ての比較結果を確認します。
タブを切り替えて、[調整 1][調整 2]
[調整 3]
[システム 3]
[システム 4]「ネットワーク」の
全てのパラメータの比較結果を確認します。
タブ切替
2
3
4
赤字:相違部分
5
6
7
8
システム予約は、工場出荷時の設定が個体・バージョンによりことなる場合がありま
す。このため、比較結果にてシステム予約に設定相違が起こる場合がありますが問題
有りません(製品機能への影響はありません)
。
9
通信ソフトウェア
10
11
付
10-16
10-4 設定値の保存・比較・コピー
1
10-4-4.保存済み設定ファイルをドライバへ書き込む
PC にバックアップ済みのパラメータ設定値を、通信中のドライバ内部パラメータへ
書込み(コピー)する方法を説明します。
2
3
比較手順
1
通信中のドライバ内部パラメータを読み出します。(10-3-1 手順 1 と共通手順)
「パラメータ設定」ウインドウを開きます。
4
5
「パラメータ設定」ウィンドウの[サーボから読み込み]ボタンをクリックします。
現在の設定値(通信中のドライバ内部のパラメータ)がドライバから読み込まれ、「サーボの値」
と「現在値」の欄に表示されます。
2
保存済み設定ファイルを読み出します。(10-4-2 手順 1~2 と共通手順)
ファイルメニューから、「ファイルを開く」を選択します。
6
読み出したいファイル名を設定して、[開く]ボタンをクリックします。
保存済み設定ファイルの設定値が読み込まれ、
「現在値」の欄に表示されます。
保存済み設定ファイルの設定値と、通信中のドライバ内部のパラメータ設定値の相違部分が赤字
で表示されます。
7
ファイルから読み込んだ設定値
(保存済み設定ファイルのパラメータ設定値)
8
書込み先ドライバの書込み前の値
(通信中のドライバ内部のパラメ
ータ設定値)
9
通信ソフトウェア
10
11
付
赤字:相違部分
3
ドライバ固有パラメータ(AJ16:速度モニタオフセット、AJ17:速度モニタオフセット)を書き
込む場合は、
「ドライバ固有パラメータを書き込む」にチェックを入れます。 (10-3-1 手順 3 と
共通手順)
10-17
10-4 設定値の保存・比較・コピー
4
[サーボに書き込む]ボタンをクリックします。 (10-3-1 手順 3 と共通手順)
「設定値」に表示されている保存済みファイルの設定値を、通信中のドライバへ書込みます。
「ドライバ固有パラメータを書き込む」にチェックを入れた場合は、確認画面が表示されます。
書き込みを実行する場合は[OK]ボタンをクリックします。書き込みを行わない場合は[キャ
ンセル]ボタンをクリックします。
1
2
3
※「サーボに書き込む」を実行後も「サーボの値」の表示は更新されません。
「サーボから読み込み」を実行することで、「サーボの値」が更新され、書込み後の最新の
ドライバ内部のパラメータ設定値が表示されます。
通信異常等により正常な書込みが実行出来ない場合、警告メッセージが表示されます。
再度、
「サーボに書き込む」を実行してください。
警告メッセージが繰り返し表示される場合は、パラメータの比較を実施してコピーで
きないパラメータをご確認ください。
比較相違として表示されるパラメータ(書込み(コピー)できないパラメータ)がシ
ステム予約のみであれば、製品機能への影響はありません。
5
6
7
8
9
10
通信ソフトウェア
この操作により書込み(コピー)されるパラメータは、
[調整 1][調整 2][調整 3][システム 3][システム 4][ネットワーク]です。
この操作では、HA-800C に設定されている「動作データ(ポイントテーブル)
」は書
込み(コピー)されません。「動作データ(ポイントテーブル)
」をコピーする場合は、
PSF-680CL または CC-Link コマンドを利用してください。(本書の付録 3,4 をご参照
ください)
4
11
付
10-18
10-5 テスト運転
1
2
10-5 テスト運転
速度を指定しての単純な JOG 動作と、移動量を指定しての JOG 動作をおこなうことが出来ます。
3
警
4
告
● JOG 動作中は非常停止以外の入力信号の操作は、無視されます。また、RXn4:正
転ストロークエンド、RXn5:逆転ストロークエンドも無視して動作しますので、
周囲の状況によく注意して操作してください。
● ドライバの押しボタン操作による T04 JOG 動作は、同時に行わないようにしてく
ださい。動作が不安定になります。
● JOG 動作時には、トルク制限機能は無効になります。
5
RYn0:サーボ ON 指令の入力によりアクチュエータがサーボオンしている場合には
「JOG 動作」に入ることが出来ません。RYn0:サーボ ON 指令は 0 にしてください。
テスト運転実施後は、上位装置の現在値と実際の機械位置にズレが生じますので、ご
注意ください。
6
7
8
9
2、5
10
通信ソフトウェア
速度と加減速を指定して
JOG 動作をおこなう場合
11
1
3
移動量を指定して JOG 動
作をおこなう場合
付
4
6
速度と加減速を指定して JOG 動作をおこなう場合
1
2
3
JOG 速度(r/min)と、JOG 加減速時間(ms)※1を設定します。
[サーボ ON]ボタンをクリックすると、アクチュエータがサーボオンします。
ボタンの表示は「サーボ OFF」となります。
マウスカーソルを[正転]ボタンにあわせて、マウスの[正転]ボタンを押している間は、
アクチュエータは、正転に動作します。逆転させる場合は、[逆転]ボタンで同じ操作をします。
10-19
10-5 テスト運転
1
移動量を指定して JOG 動作をおこなう場合
1
JOG 速度(r/min)と、JOG 加減速時間(ms)*1、移動距離(パルス)、移動速度(r/min)、
加減速時間(ms)*1、移動距離のモード(相対値/絶対値)を設定します。
JOG 動作では電子ギヤの設定は機能しませんので、アクチュエータ分解能を参考に希望の移動
距離(パルス)を設定してください。
2
3
[サーボ ON]ボタンをクリックすると、アクチュエータがサーボオンします。
ボタンの表示は「サーボ OFF」となります。
2
3
実行したい No(1~5)をクリックして、
[実行]ボタンをクリックすると、プログラム運転を開
始し、指定した移動距離の動作が終了すると停止します。
4
*1:加減速時間は、アクチュエータが停止した状態から、アクチュエータの最大速度まで達する時間を設定
5
します。
6
7
8
9
通信ソフトウェア
10
11
付
10-20
10-6 出力信号操作
1
2
10-6 出力信号操作
Output1~3 の信号を任意に ON/OFF 出力することができます。
3
2
4
5
1、3
6
7
8
9
1
2
[実行]ボタンをクリックします。
出力させたい信号名をチェックします。
チェックされた信号が ON します。
お客様の上位装置との確認検証にご使用になれます。
3
[実行]ボタンを再度クリックすると、出力信号操作は終了し、操作した出力信号は元の状態に
戻ります。
10
通信ソフトウェア
ドライバのパネル操作による「T01:出力信号操作」とは同時に使用できません。
この操作では、実際に出力信号が出力されます。操作によって機器が動作することが
あるので、注意してください。また、上位コントローラからの指令で HA-800C が自動
運転中でも、操作ができますので、実際の操作のときは十分注意してください。
テストモードからの出力信号操作と同時には実行できません。
11
付
10-21
10-7 IO モニタ
1
10-7 IO モニタ
2
入力信号、出力信号の割付けられたピンの状態をモニタします。
3
4
5
6
入力信号、出力信号ピンの状態を表示します。
状態は以下のようになります。
7
入力信号
ON:入力あり
OFF:入力無
8
出力信号
ON:出力中
OFF:出力 OFF 中
9
通信ソフトウェア
10
11
付
10-22
10-8 波形モニタ
1
2
10-8 波形モニタ
速度、トルクのほかに、各種状態信号の波形を表示することができます。
波形表示部
3
トリガ条件設定
4
5
トレース時間設定
6
トレース開始
7
波形表示モード
8
波形測定
9
通信ソフトウェア
10
11
付
時間軸設定
波形表示選択
波形の取得方法
1
波形表示選択から、表示したい波形を選択します。
Ch1、Ch2 は速度と、トルクを選択できます。トルクと速度を選択した場合は、1div の表示も設
定します。
2
3
トリガ条件を設定します。
トレース時間を設定します。
100ms を選択した場合、表示される時間軸は 5ms/div から、100ms/div まで設定可能です。10s
を選択した場合は、100ms/div~1000ms/div まで設定可能です。時間軸設定は時間軸設定からプ
ルダウンメニューで選択します。
10-23
10-8 波形モニタ
4
トレース開始をクリックします。
トリガ待ちとなり設定したトリガレベルになると波形を取得して、波形表示部に表示します。波
形取込みには時間がかかります。
波形表示モードで、今回の波形と前回、および前々回の波形を同時表示することが可能です。
波形測定で、時間軸の測定や、速度、トルクの測定が可能です。波形取込みには時間がかか
ります。
波形取得後も波形表示選択で表示する波形を変更できます。
1
2
3
4
5
6
時間軸の測定(立ち上がり時間を測定)
5
7
速度、トルクの測定
ファイルメニューから、名前をつけて保存を実行すると、波形データを保存することができます。
波形データは、CSV 形式と wv 形式の選択が可能です。CSV 形式で保存すると、エクセルで読み
込むことが可能となりますが、ファイルメニューから開いて PSF-800 で表示することはできま
せん。Wv 形式で保存すると、エクセル等で読み込むことはできませんが、ファイルメニューか
ら「開く」を選択して読み込むことで、PSF-800 に波形を表示することが可能です。
8
9
通信ソフトウェア
10
11
付
・CSV 形式
・wv 形式
フィードバック速度
指令速度
-200
0
200
400
600
800
エクセルでの表示が可能です。
1000
再度 PSF-800 に波形を読み込むことができます。
10-24
10-9 アラーム
1
2
3
10-9 アラーム
HA-800C ドライバにアラームまたはワーニングが発生している場合、内容を確認することができます。
発生しているアラームまたはワーニングは赤く表示されます。
また、過去 8 回分のアラーム履歴の表示も確認可能です。
4
5
6
7
8
9
アラームリセット
アラームリセットボタンにてアラームリセット可能なアラームでアラーム状態が解除された
アラームはリセット可能です。
通信ソフトウェア
10
11
履歴クリア
履歴クリアボタンにて 8 回までのアラーム履歴がクリアできます。
付
10-25
10-10 ポイントテーブル編集・動作
1
10-10 ポイントテーブル編集・動作
「ポイントテーブル」ウィンドウでは、HA-800C のポイントテーブルの編集、動作、保存、サーボへ
の書き込みを行うことができます。
2
3
10-10-1.PSF-800 ポイントテーブル編集・動作
4
5
6
7
8
9
ポイントテーブル編集・動作は、
1. CC-Link 通信*1
2. PSF-800(HA-800C:Ver.3.00 以降、PSF-800:Ver.2.00 以降) *2
3. PSF-680CL*3
で行うことができます。
*1:「13-4 通信プロファイル」(P13-19)を参照してください。
*2:17bit アブソリュートエンコーダ搭載のアクチュエータでのみ使用できます。
*3:PSF-680CL を用いてポイントテーブル編集・動作を行う場合は、局番 70 への変更及び電源の再投入が必要
です。詳細については、PSF-680CL 操作マニュアルを参照してください。
通信ソフトウェア
10
11
付
PSF-800 で の ポ イ ン ト テ ー ブ ル ウ ィ ン ド ウ に よ る ポ イ ン ト テ ー ブ ル 編 集 は 、
HA-800C:Ver.3.00 以降、PSF-800:Ver.2.00 以降でのみ可能です。
ポイントテーブル編集・動作実施前には必ず、単位設定に関係する、SP44/SP45 : 電
子ギヤ、SP50 : 指令極性、SP67 : 出力軸分割機能設定、SP68 : 電子ギヤ機能設定、
NP00 : アクチュエータ分解能、の設定内容を確認し、ご使用の方法に合わせて設定し
てください。
ポイントテーブル No.0 のデータは、RAM 上でのみ管理されるため、ファイル
/EEPROM には保存されません。
使用可能なポイントテーブル数は、占有局数の設定によって下記となります。
•
1 局占有時:No.0~31
•
2 局占有時:No.0~127
10-26
10-10 ポイントテーブル編集・動作
1
10-10-2.PSF-800 でのポイントテーブル編集
ポイントテーブルの編集は、下記の手順で実施してください。
2
オンライン(HA-800C の電源が ON かつ PSF-800 と正常に通信できている状態)
事前にパラメータを設定する*1
サーボから読み込み
単位設定の実施
ポイントテーブルデータの編集
(ア) ポイントテーブル編集
(イ) ファイル読み込み*2
5. サーボへ書き込み
6. ファイルへ保存*3
1.
2.
3.
4.
3
4
5
6
オフライン(HA-800C の電源が OFF または、通信ケーブル未接続、COM ポート違い
等で PSF-800 と正常に通信ができていない状態)
1. 事前にパラメータを確認*1
2. 単位設定の実施
3. ポイントテーブルデータの編集
(ア) ポイントテーブル編集
(イ) ファイル読み込み*2
4. ファイルへ保存*3
7
8
9
通信ソフトウェア
10
*1:単位設定に関係する「SP44:電子ギヤ分子」、「SP45:電子ギヤ分母」、「SP50:指令極性」、「SP67:出力軸
分割機能設定」、「SP68:電子ギヤ機能設定」、「NP00:アクチュエータ分解能」をご使用の方法に合わせて
設定してください。
*2:PSF-680CL で保存されたポイントテーブルデータを、PSF-800 を用いて HA-800C へ書き込むことも可能で
す。
*3:ポイントテーブルウィンドウを選択した状態で、ファイルメニューから、「名前を付けて保存」を選択するこ
とで、ポイントテーブルデータ(単位設定を含む)を保存することもできます。なお、ファイル保存されたポイ
ントテーブルデータをサーボへ書き込むためには、一度サーボからポイントテーブルデータの読み出しを行
う必要があります。
11
オンラインの場合、
• ポイントテーブルウィンドウ初回選択時
• 単位設定選択時
• サーボから読み出し時
• サーボへの書き込み時
• ファイル保存選択時
にサーボから単位設定に関係するパラメータを自動的に読み込みます。必要に応じて
ポイントテーブルデータ(単位設定を含む)をファイルに保存してください。
ポイントテーブル No.0 のデータは、RAM 上でのみ管理されるため、ファイルには保
存されません。
単位設定機能によって四捨五入が行われ、適切な設定値となっていない可能性がある
設定については、「背景色」が変化します。詳細については、下記を参照してください。
付
10-27
10-10 ポイントテーブル編集・動作
単位換算は、下記の数式によって行っており、計算結果が整数となっていない場合に、「背景色」
が変化します。
1
2
移動量
360,000
3
移動量設定値(0.001deg) = 指令パルス数(pulse)×
NP00:アクチュエータ分解能
NP00:アクチュエータ分解能
4
指令パルス数(pulse) = 移動量設定値(0.001deg)×
360,000
5
速度
100×60
速度設定値(0.01r/min) = 指令速度(pls/sec) ×
6
NP00:アクチュエータ分解能
NP00:アクチュエータ分解能
7
指令速度(pls/sec) = 速度設定値(0.01r/min) ×
100×60
動作パターンによっては、誤差が累積し位置ずれ等の原因となりますので、設定内容を確認した
上で、サーボに書込みを行ってください。特に相対値での動作を繰り返し実施するような動作パ
ターンでは、位置ずれの原因となります。
例)0.001deg 設定時
9
通信ソフトウェア
10
アクチュエータ分解能:1,000,000
移動量単位:0.01deg
移動量設定値:30000(30.000deg)
指令パルス数(pulse) = 30000×
8
11
1,000,000
360,000
= 83333.33 → 83333
付
1 回の動作で 0.33pulse=0.00012deg 相当の位置ずれが発生します。
この場合、10,000 回動作を繰り返すと、1.2deg 相当の位置ずれが発生することになります。
10-28
10-10 ポイントテーブル編集・動作
1
2
10-10-3.単位設定
ポイントテーブルウィンドウでの編集・動作時の移動量単位及び速度単位を設定することができます。
3
4
5
6
7
8
9
通信ソフトウェア
10
接続されたアクチュエータ及び下記パラメータの設定に応じて、選択可能な単位設定(移動量単位、速
度単位)が異なります。
SP44:電子ギヤ分子
SP45:電子ギヤ分母
SP50:指令極性
SP67:出力軸分割機能設定
SP68:電子ギヤ機能設定
NP00:アクチュエータ分解能
適用アクチュエータによって関係するパラメータ、設定が異なりますので、ご使用のアクチュエータ
に応じて、下記を参照してください。
1. SHA シリーズ、FHA-Cmini シリーズ(17bit アブソリュートエンコーダ(SHA-CG シリーズ以外))
2. SHA-CG シリーズ(17bit アブソリュートエンコーダ)
11
移動量単位、速度単位の設定は、ポイントテーブルウィンドウでのポイントテーブル
編集時のみ影響します。
単位設定に関係する、「SP44:電子ギヤ分子」、「SP45:電子ギヤ分母」、「SP50:指
令極性」、
「SP67:出力軸分割機能設定」、
「SP68:電子ギヤ機能設定」
、「NP00:アク
チュエータ分解能」を単位設定実行前に設定してください。
0.001deg や 0.01r/min 等は、出力軸での角度、速度となります。状態表示での数値モ
ニタではモータ軸での位置、速度となりますので、ご注意ください。
原点復帰速度、原点復帰加減速時間についても、上記設定によって動作が異なります
ので、十分に注意して設定してください。なお、移動量単位、速度単位の設定は、原
点復帰速度、原点復帰加減速時間の表示に対しては影響しません。
付
10-29
10-10 ポイントテーブル編集・動作
1.SHA シリーズ、FHA-Cmini シリーズ(17bit アブソリュートエンコーダ(SHA-CG シ
リーズ以外))
NP00:アクチュエータ分解能
が関係します。(NP00 を pulse から deg, rev への換算値に使用しています。)
1
2
移動量単位:pulse, 0.001deg
速度単位 :pps, 0.01r/min
3
2.SHA-CG シリーズ(17bit アブソリュートエンコーダ)
SP67:出力軸分割機能設定
NP00:アクチュエータ分解能
が関係します。(NP00 を pulse から deg, rev への換算値に使用しています。)
4
5
SP67 が 0 の場合
移動量単位:pulse, 0.001deg
速度単位 :pps, 0.01r/min
6
以下の場合は、NP00 の設定は影響しません。
SP67 が 1 の場合
移動量単位:0.01deg(SP67=1)
速度単位 :0.01deg/sec(SP67=1)
7
SP67 が 2 の場合
移動量単位:0.001deg(SP67=2)
速度単位 :0.001deg/sec(SP67=2)
8
9
SP67 が 3 の場合
移動量単位:0.0001deg(SP67=3)
速度単位 :0.0001deg/sec(SP67=3)
通信ソフトウェア
10
11
付
10-30
10-10 ポイントテーブル編集・動作
1
2
10-10-4.サーボから読み込み
サーボからポイントテーブルデータ及び単位設定に関するパラメータの読み出しを実行します。
3
サーボから読出しを行うと、編集中のポイントテーブル、単位設定を元に戻すことは
できませんので、必要に応じてポイントテーブルデータ(単位設定を含む)をファイルに
保存してください。
4
5
6
10-10-5.サーボに書き込む
サーボへポイントテーブルデータ書き込みを実行します。なお、ポイントテーブルデータをサーボへ
書き込むためには、一度サーボからポイントテーブルデータの読み出しを行う必要があります。
7
8
9
通信ソフトウェア
10
11
付
すべて書き込む
ポイントテーブル No.0~127 の全てをサーボに書き込みます。
書き込む範囲を指定する
ポイントテーブル No.0~127 から、任意の範囲のデータをサーボに書き込みます。
パラメータは書き込まれませんので、別途パラメータウィンドウから書き込みを行っ
てください。
サーボに書き込みを行った場合、RAM/EEPROM にポイントテーブルデータが保存さ
れます。なお、ポイントテーブル No.0 のデータは、RAM 上でのみ管理されるため、
EEPROM には保存されません。
PSF-800 とサーボでのパラメータ間に相違がある場合には、警告が表示されます。警
告内容を十分に確認した上で、サーボへの書き込みを実施して下さい。
10-31
10-10 ポイントテーブル編集・動作
1
10-10-6.ファイル読み込み
保存したポイントテーブルデータファイルを PSF-800 へ読み込んだ場合*1、パラメータ比較画面が表
示されます。
ファイルに保存されたパラメータと PSF-800 に設定されているパラメータの比較を行い、パラメータ
が異なるものについては、赤字で表示されます。
なお、各種パラメータ設定に関しては、パラメータウィンドウから書き込みを行ってください。
2
3
4
5
6
7
8
9
通信ソフトウェア
10
11
付
ファームバージョンやアクチュエータコード、各種パラメータの設定が異なる場合に
は、各種パラメータの設定確認及びポイントテーブルデータの確認を行った上で、サ
ーボへの書き込み、動作を行ってください。
各種パラメータ設定が異なっていても、サーボへの書き込みを実行することは可能で
すが、予期せぬ動作となることがありますので、設定内容を十分に確認の上で設定を
実行してください。
アクチュエータコードが異なる場合、エンコーダ分解能や減速比等の違いにより、予
期せぬ動作となる場合があります。(アクチュエータコードは、接続されたアクチュエ
ータを区別するための 4 桁のコードです。)
10-32
10-10 ポイントテーブル編集・動作
1
2
3
4
10-10-7.ポイントテーブルの保存とドライバへの書き込み
ポイントテーブルデータを PC にバックアップする方法、PC にバックアップ済みのポイントテーブル
データを、通信中のドライバ内部へ書き込み(コピー)する方法を説明します。
ポイントテーブルの保存
1.
2.
サーボから読み込み
ファイルへ保存
ポイントテーブルデータのドライバへの書き込み
1.
2.
3.
5
6
サーボから読み込み
ファイルを開く
サーボに書き込む(全て書き込む)
メンテナンス等でドライバ HA-800C を交換する場合には、必ず付録-4(P 付-22)を
参照してください。
この操作によって保存、書き込みされるデータは、[ポイントテーブル(動作データ)]で
す。
この操作では、HA-800C に設定されている[調整 1][調整 2][調整 3][システム 3][システ
ム 4][ネットワーク]は保存、書き込みは行われません。これらの保存、書き込みを行う
場合は、パラメータウィンドウを利用してください。
ポイントテーブルデータのドライバへの書き込みは、パラメータ([調整 1][調整 2][調整
3][システム 3][システム 4][ネットワーク])をドライバへ書き込んだ後で行ってください。
7
8
9
通信ソフトウェア
10
11
付
10-33
10-10 ポイントテーブル編集・動作
1
10-10-8.ポイントテーブル動作
「ポイントテーブル動作」ウィンドウでは、編集したポイントテーブルデータに基づく動作を確認す
ることができます。
ポイントテーブル動作ウィンドウは、次の条件が満たされている場合に実行できます。
・HA-800C と接続され、電源が投入されている事(運転が緑色点灯)
・ポイントテーブルを HA-800C より読み込んでいる事
・アラームが発生していない事
・サーボオフ状態である事
・位置制御になっている事(RY(n+2)3,RY(n+2)4 が 0)
ポイントテーブル動作ウィンドウで編集された場合、元に戻すことはできませんので、
必要に応じてポイントテーブルデータ(単位設定を含む)をファイルに保存してくださ
い。
10-34
3
4
5
6
7
8
9
10
通信ソフトウェア
テスト運転(JOG 運転、プログラム運転)とは異なり、全てのパラメータ設定に従って
動作しますので、モータの動作によって危険が無いことを十分に確認した上で、実行
してください。特に下記のパラメータの設定にご注意ください。
• SP44/SP45:電子ギヤ
• SP50:指令極性
• SP67:出力軸分割機能設定
• SP68:電子ギヤ機能設定
• NP17:近回り有効/無効
• RYn3:トルク制限
• RYn4:正転ストロークエンド
• RYn5:逆転ストロークエンド
ポイントテーブル動作を行うためには、CC-Link 通信から「RYn4:正転ストロークエ
ンド」
、(または)「RYn5:逆転ストロークエンド」を「1」と設定する必要があります。
なお、CC-Link マスタに電源を投入しない、または CC-Link 通信ケーブルを接続しな
い状態で、HA-800C の電源を投入することでもポイントテーブル動作を行うことがで
きます。
動作角度、動作速度、回転方向や原点復帰動作関係の設定を十分に確認した上で、実
行してください。
非常停止信号(CN2-2)、正転/逆転ストロークエンド(RYn4,RYn5)によって速やかに停止
できる状況で使用してください。
ポイントテーブル動作ウィンドウ編集時には、CC-Link 通信からの下記の命令が無視
されます。その他の CC-Link 通信(RX,RY,RWw,RWr)は機能しますので、マスタのシー
ケンスには十分にご注意ください。なお、ポイントテーブル動作ウィンドウを終了し
たタイミングで、CC-Link 通信からの命令を実行しますので、十分にご注意ください。
1 局占有
2 局占有
信号名称
RYn0
RYn0
サーボ ON 指令
RYn1
RYn1
起動
RYn2
RYn2
起動選択
RYn9
RYn9
命令コード実行要求
RY(n+2)3
速度制御切り替え
RY(n+2)4
トルク制御切り替え
RY(n+2)5
JOG 動作
RY(n+2)6
JOG 回転方向
2
11
付
10-10 ポイントテーブル編集・動作
1
2
3
4
5
6
7
8
9
通信ソフトウェア
10
11
ポイントテーブル動作
1.
2.
3.
4.
5.
6.
動作させたいポイントテーブル No を指定し、ポイントテーブルデータ内容を確認してくだ
さい。
サーボ ON ボタンをクリックし、サーボ ON 状態にしてください。
必要に応じて原点復帰ボタンをクリックし、原点復帰動作を行ってください。
動作開始ボタンをクリックすると、指定されたポイントテーブルデータに従って動作します。
ポイントテーブル動作ウィンドウを閉じる際には、サーボ OFF をクリックし、サーボ OFF
したことを確認した上で、終了をクリックしてください。
ポイントテーブルデータ内容を編集後は、サーボへの書き込みが必要です。
数値モニタ
現在のモータ回転速度等をモニタすることができます。
付
ポイントテーブル動作によって、機械の位置ずれが発生している可能性がありますの
で、通常運転前に必ず電源の再投入や原点復帰で適切な位置を設定してください。
適用アクチュエータの最高回転速度以上の速度の設定も可能ですが、実際動作時は、
制御部にてアクチュエータの最高回転速度で動作は制限され、「AL10:過速度」、
「AL60:偏差過大」等のアラームとなる場合があります。ご使用になられるアクチュ
エータの最高回転数を確認の上、速度の値を設定してください。
10-35
第
11章
トラブルシューティング
ここでは、ドライバのアラーム発生状況、ワーニング(警告)発生状態の内容詳細を説
明します。
11-1 アラームとその処置 ·························································· 11-1
11-2 ワーニングとその処置 ····················································· 11-13
11-1 アラームとその処置
1
2
3
4
5
6
7
8
9
10
トラブルシューティング
11
付
11-1 アラームとその処置
アクチュエータの動作中に不具合が発生した時にドライバはアラームやワーニング(警告)を表示し、
異常事態から保護するための機能を内蔵しています。
アラーム状態:アクチュエータやドライバが異常状態となった時、ドライバはアラームを発生し、ア
ラーム信号出力すると同時に、サーボループをオフします。
ワーニング(警告)
:アクチュエータやドライバがアラーム状態になる前に、ワーニング(警告)を表
示します。サーボループはオン状態です。直ちにワーニングの原因を取り除いて
ください。(ワーニング 93:主回路電圧低下が発生中は、サーボループをオフし
ます。
)
アクチュエータとドライバの保護機能が作動した場合は、アクチュエータが駆動を停止(モータはサ
ーボオフとなる)し、表示部に 2 桁のアラームコードが表示され CN2-9:アラーム信号が有効になり
ます。
また、過去 8 回までのアラーム内容と発生時のドライバの総稼働時間(単位 h)が表示されます。
アラーム履歴については「アラームモード」(P7-8)を参照してください。
アラーム一覧
表示されるアラームは下記のようになります。
アラーム
コード
AL01
AL10
AL20
AL30
AL40
AL41
AL42
AL43
AL44
AL45
AL46
AL47
AL50
AL51
AL52
AL53
AL54
AL55
AL60
AL70
AL71
AL72
AL73
AL76
AL80
AL81
AL82
AL83
AL84
AL85
AL86
11-1
アラーム名称
非常停止
過速度
過負荷
IPM エラー(過電流)
過電圧
回生抵抗過熱
過回生*5
欠相*5
制御電源低下*5*6
主回路電圧低下*5
ダイナミックブレーキ過熱*5
パワー回路破損
エンコーダ断線
エンコーダ受信異常*1
UVW 異常*1
システムダウン*2
多回転オーバーフロー*2
多回転データエラー*2
偏差過大
メモリ異常(RAM)
メモリ異常(EEPROM)
FPGA コンフィグエラー
FPGA 設定エラー
プロセッサー異常*6*7
MEMORY エラー*3
システムダウン*3
1 回転データ異常*3
多回転データ異常*3
BUSY エラー*3
過熱エラー*3
通信エラー*3
アラーム
クリア
可*4
不可
可*4
不可
不可
不可
不可
不可
不可
不可
不可
不可(可)*8
不可
不可
不可
不可
不可
不可
可(不可)*4
不可
不可
不可
不可
不可*6
不可
不可
不可
不可
不可
不可
不可
11-1 アラームとその処置
*1: インクリメンタルエンコーダ仕様と組み合わせた場合に、発生する可能性のあるアラームです。
*2: 13bit アブソリュートエンコーダ仕様と組み合わせた場合に、発生する可能性のあるアラームです。
*3: 17bit アブソリュートエンコーダ仕様(17bit エンコーダインクリメンタル仕様を含む)と組み合わせた場合
に、発生する可能性のあるアラームです。
*4: アラームクリア入力、またはアラームクリア命令でアラームをリセット後は、サーボ ON 信号が ON になっ
ていてもサーボ ON しません。リセット後、サーボ ON 信号をいったんオフしてから、再度オンしてくださ
い。
また、位置制御動作している場合、アラームクリア入力、アラームクリア命令でアラームはリセットできま
すが、偏差はクリアされません。偏差過大アラーム発生時は、偏差クリア命令で偏差をクリアした後、アラ
ームクリア入力、またはアラームクリア命令でアラームをリセットしてください。
上記操作でアラームがクリアされない場合、ドライバの電源を再投入してください。
*5: HA-800*-24 にて、発生する可能性があるアラームです。
*6: このアラームは、アラーム履歴に保存されません。
*7: アラーム発生の状況によっては、読み出し命令で読み出したアラームコードが不定になっていることがあり
ます。
*8: HA-800C-24 ではアラームクリアできません。HA-800C-1/3/6 ではアラームクリアできます。
アラーム対処方法
アラーム
名称
非常停止
2
3
4
5
6
各アラームの対処方法を説明します。
アラーム
コード
AL01
1
7
内容
発生状況
処置
非常停止信号が入力
されました。
制御回路電源投
入の時点で発生
非常停止入力の論理がノーマルクローズ
に設定されている場合
→ 非常停止信号が入力されているか確認し
てください。
動作中に発生
非常停止入力の論理がノーマルオープン
の場合
→ 非常停止信号が入力されていないことを
確認してください。
上記にあてはまらない場合は、弊社営業所に
ご相談ください。
非常停止信号を解除後、制御電源を再投
入するか、アラームクリア信号を入力し
てください。
ノイズによる誤動作
→ ノイズ環境を確認してください。
制御回路の異常
→ ドライバを交換してください。
11-2
9
10
11
トラブルシューティング
非常停止入力の配線に断線
→ 短絡、接触不良等の不具合がないか確認
してください。
8
付
11-1 アラームとその処置
1
2
アラーム
コード
AL10
アラーム
名称
過速度
内容
発生状況
処置
モータの回転速度
が、モータの最大回
転速度を超えまし
た。
制御回路電源投
入の時点で発生
回転指令を入力
するとアクチュ
エータが高速回
転し発生
制御回路の異常
→ 弊社営業所に連絡してください。
ゲイン調整不備によるオーバシュート
→ 負荷状況にマッチするように、調整モー
ドの「AJ00:位置ループゲイン」「AJ01:
速度ループゲイン」「AJ02:速度ループ積
分補償」を調整してください。
3
電子ギヤの設定が不適切
→ 「SP44, 45:電子ギヤ設定」、「SP67:出
力軸分割機能設定」に対して、指令周波
数が大きい。適正な電子ギヤ設定にする。
または、指令周波数を修正してください。
4
5
「RWwn5:トルク指令」の設定値が過大
→ 「RWwn5:トルク指令」を下げてくださ
い。
6
AL20
7
8
過負荷
許容連続電流値を越
えました。
アクチュエータ
単独(無負荷)で
も発生
制御回路電源投
入の時点で発生
した場合
運転中に発生
9
10
モータまたはエンコーダの誤接続
→ 「2章設置・配線」を参照の上、正しい接
続を行ってください。
摩擦トルクが大きい
→ 保持ブレーキが解放されていることを確
認してください。
制御回路の異常
→ 弊社営業所に連絡してください。
許容連続電流の 1.2 倍以上の電流が長時
間流れた。
許容連続電流の 3 倍の電流が約 2 秒間流
れた。
→ アクチュエータの実効負荷率を再検討
し、電源を再投入して運転を再開してく
ださい。
トラブルシューティング
11
付
アクチュエータ
動作が乱調気味
の後に発生
11-3
摩擦トルク、負荷トルクが大きい
→ 保持ブレーキが解放されていることを確
認してください。
→ アクチュエータ出力トルクが負荷トルク
に対応できていることを確認してくださ
い。
ゲイン調整不備によるハンチング現象
→ 負荷状況にマッチするように、調整モー
ドの「AJ00:位置ループゲイン」「AJ01:
速度ループゲイン」「AJ02:速度ループ積
分補償」を調整してください。
11-1 アラームとその処置
アラーム
コード
AL30
アラーム
名称
IPM エラ
ー(過電
流)
内容
発生状況
サーボ電流制御素子
が過電流を検出しま
した。
制御回路電源投
入の時点で発生
した場合
「RYn0:サーボ
ON」が 1 で発生
「RYn0:サーボ
ON」が 1 で発生
するが、モータケ
ーブル(U,V,W)
を外すと正常
加速中または減
速中に発生
1
処置
制御回路の異常
→ 弊社営業所に連絡してください。
→
→
2
制御回路の異常
弊社営業所に連絡してください。
モータケーブルの短絡
モータケーブルの接続部の点検・再接続、
または交換修理してください。
モータ巻線部の短絡
→ 弊社営業所に連絡してください。(アク
チュエータの交換)
負荷慣性モーメント(イナーシャ)が過
大、加減速時間が短すぎる。
→ 負荷の慣性モーメントの低減をはかって
ください。
→ 速度制御の場合、調整モードで「AJ12:
加減速時定数」の設定時間を長くしてく
ださい。
ゲインが高すぎる、または低すぎる
→ 負荷状況にマッチするように、調整モー
ドで「AJ00:位置ループゲイン」「AJ01:
速度ループゲイン」「AJ02:速度ループ積
分補償」を調整してください。
回生抵抗の誤配線(HA-800C-24)
→ 外付回生抵抗の抵抗値が低い。または、
短絡している。内蔵回生抵抗と並列接続
されている。
運転中に発生(4 過負荷になっている
~5 分後に運転 → アクチュエータの実効負荷率を再検討
を再開できます)
し、負荷率の低減をはかってください。
11-4
4
5
6
7
8
9
10
11
トラブルシューティング
主回路電源遮断
時に発生
ドライバの周囲温度が 50℃以上
→ ドライバの設置場所、冷却システムを再
検討してください。
回生抵抗の誤配線(HA-800C-24)
→ 外付回生抵抗の抵抗値が低い。または、
短絡している。内蔵回生抵抗と並列接続
されている。
3
付
11-1 アラームとその処置
1
2
アラーム
コード
AL40
アラーム
名称
過電圧
内容
主回路の電圧が約
DC400V を越えまし
た。
発生状況
運転中に発生
3
4
5
AL41
6
7
回生抵抗
過熱
回生抵抗に取り付け
た温度スイッチが作
動しました。
減速時に発生
処置
負荷の慣性モーメントが過大
→ 内蔵回生抵抗が機能していない。「R1、
R3 端子」にショートバーを接続してくだ
さい。(HA-800C-3, -6, -24)
→ 外付回生抵抗を「R1、R2 端子」に接続し
てください。
→ 減速時間を長くしてください。
→ 最高速度を下げてください。
→ 負荷の慣性モーメントを小さくしてくだ
さい。
→
→
過電圧検出回路の異常
弊社営業所に連絡してください。
回生抵抗の容量不足
回生吸収容量を上げるため、外部回生抵
抗を取り付けてください。
→ HA-800C-24 にて、外付回生抵抗を使用す
る場合は、「SP64:回生抵抗選択」にて、
「1:外付回生抵抗使用」を設定してくだ
さい。
回生エネルギー処理回路の異常
→ 弊社営業所に連絡してください。
主回路電源投入 回生抵抗が正しく配線されていないか、
後 に 発 生
抵抗が接続されていない。
(HA-800C-24) → 回生抵抗を正しく接続してください。
外付回生抵抗を 回生抵抗が正しく配線されていないか、
使用している場
抵抗が接続されていない。
合(HA-800C-24) → 回生抵抗を正しく接続してください。
8
9
10
回生抵抗選択(SP64)のパラメータ設定が
間違っている。
→ システムパラメータ SP64 の設定を変更
して、外付け回生抵抗を選択してくださ
い。
トラブルシューティング
11
付
11-5
11-1 アラームとその処置
アラーム
コード
AL42
アラーム
名称
過回生
(HA-800
C-24)
発生状況
処置
著しく過大な
回生エネルギ
ーを回生抵抗
が吸収した。
減速時に発生
回生抵抗の容量不足
→ 回生吸収容量を上げるため、外部回生抵抗を取り
付け、システムパラメータ SP64 の設定を変更し
てください。
回生エネルギ処理回路の異常
→ 弊社営業所に連絡してください。(HA-800C ド
ライバの交換)
主回路電源投
入後に発生
外付回生抵抗
を使用してい
る場合
AL43
欠相
(HA-800
C-24)
1
内容
主 回 路 電 源 入 主回路電源投
力(R,S,T)部に、 入後に発生す
単相電源が供 る
給された。
制御電源
低下
(HA-800
C-24)
制御電源入力
(r,s)部の電圧が
低下した。
AL45
主回路電
圧低下
(HA-800
C-24)
主 回 路 電 源 主回路電源投
(R,S,T) が 供 給 入時に発生す
されているが、 る。
主回路直流電
圧が低下して
いる。
運転中に発生
する
11-6
3
4
5
6
7
8
9
10
11
トラブルシューティング
AL44
負荷イナーシャが適応範囲を超えている
→ 構成を見直し適応範囲内の負荷イナーシャでご使
用ください。
→ 回転数を低く抑えて、回生エネルギーを軽減して
ください。
回生抵抗が正しく配線されていないか、抵抗が接
続されていない。
→ 回生抵抗を正しく接続してください。
→ 内蔵回生抵抗使用時は、ショートバーを正しく接
続してください
回生抵抗が正しく配線されていないか、抵抗が接
続されていない。
→ 回生抵抗を正しく接続してください。
回生抵抗選択(SP64)のパラメータ設定が間違って
いる。
→ システムパラメータ SP64 の設定を変更し、外付
け回生抵抗を選択してください。
配線不良
→ 三相電源の 1 相が正常に接続されていない。
電源電圧が低い。
→ 電源電圧を仕様範囲内に是正してください。
ドライバ内蔵の主回路ヒューズの 1 本断線
→ 三相電源入力に対して 2 本内蔵しているヒューズ
の内、1 本が断線した。
モータ出力が地絡・誤配線、回生接続端子が地絡・
誤配線
→ 配線状態を確認し、ドライバを交換してください。
(原因を除去せずにドライバ交換をすると再発す
ることがあります。)
保護ヒューズが断線した場合は、修理が必要です。
電源電圧が低い
→ 電源電圧を仕様範囲内に是正してください。
瞬間停電が発生している
→ 配線、電源環境を見直して、停電発生がない状態
としてください。
ショートバーの誤配線(未配線)、DC リアクトルの誤
配線、DL1-DL2 間がオープンの場合に発生します。
→ ドライバ端子台 DL1-DL2 間に、ショートバーもし
くは DC リアクトルを正しく配線してください。
ドライバ破損、誤配線等によりドライバ内蔵ヒュ
ーズ(3 相電源入力に対して 2 本内蔵しているヒ
ューズの 2 本)が断線した場合に発生します。
→ 配線状態を確認し、ドライバを交換してください。
(原因を除去せずにドライバ交換をすると再発す
ることがあります。)
保護ヒューズが断線した場合は、修理が必要です。
2
付
11-1 アラームとその処置
1
2
アラーム
コード
AL46
3
4
AL47
アラーム
名称
ダイナミ
ックブレ
ーキ過熱
(HA-800
C-24)
パワー回
路異常
5
内容
発生状況
処置
ダイナミック
ブレーキ回路
が異常な発熱
をした。
ダイナミック
ブレーキ停止
の後に発生
負荷イナーシャが過大、または、過大なマイナス
負荷が接続された状態でダイナミックブレーキ停
止をした
→ 負荷を見直してください。
ドライバ破損
以前のダイナミックブレーキ停止によりドライバ
が破損している
→ 負荷を見直してください。温度ヒューズが断線し
た場合は、修理が必要です。
サーボオンへのシーケンス異常
→ サーボオン信号がチャタリングすると発生するこ
とがあります。コントローラのシーケンスを確認
してください。
→ 外力または慣性によるモータ回転中にサーボオン
を行った場合に発生する事があります。
短時間のサーボオフ指令による異常
→ 短時間だけサーボオフ指令が入力されると発生す
ることがあります。コントローラのシーケンスを
確認してください。
→ CC-Link 通信の途絶などにより短時間のサーボオ
フ指令を行った場合に発生する事があります。
HA-800C ドライバのパワー回路の異常
→ 制御電源投入の都度異常が発生する場合は、回路
破損している可能性があります。
→ サーボオンの都度異常が発生する場合は、回路破
損している可能性があります。
弊社営業所へ連絡してください。(HA-800C ドラ
イバの交換)
エンコーダコネクタ(CN1)の未接続、または接
続不良、エンコーダ線の断線
→ エンコーダコネクタをしっかりと再接続してくだ
さい。
または、ケーブルを交換してください。
制御電源投入
時に発生
サーボオン時
の回路セルフ
チェックにて
異常を検出し
ました。
サーボオンに
て運転中に発
生
6
7
8
9
サーボオンを
した時に発生
AL50
10
エンコー
ダ断線
ドライバパワ
ー回路の異常
によるアラー
ムです。
制御電源投入
の時点で発生
または
サーボオンを
した時に発生
エンコーダか
らの信号が途
絶えました。
制御回路電源
投入の時点で
発生した場合
トラブルシューティング
11
付
AL51
エンコー
ダ受信異
常*1
エンコーダか
らのシリアル
データが正確
に受信できな
くなりました。
運転中に発生
(アクチュエ
ータの冷却に
より正常復
帰)
制御回路電源
投入の時点で
発生した場合
運転中に時々
発生
11-7
→
制御回路の異常
エンコーダ内部の破損
弊社営業所へ連絡してください。
アクチュエータ温度上昇によるエンコーダの誤動
作
→ アクチュエータの設置場所、冷却システムを再検
討してください。
エンコーダコネクタ(CN1)の未接続、または接
続不良、エンコーダ線の断線
→ エンコーダコネクタをしっかりと再接続してくだ
さい。
または、ケーブルを交換してください。
→
→
制御回路の異常
エンコーダ内部の破損
弊社営業所に連絡してください。
外来ノイズによる誤動作
「ノイズ対策」(P2-14)にそって、ノイズ対策を
行ってください。
11-1 アラームとその処置
アラーム
コード
AL52
アラーム
名称
UVW 異
常
発生状況
処置
エンコー ダの
UVW 相の信号が
異常です。
制御回路電源
投入の時点で
発生
エンコーダコネクタ(CN1)の未接続、または
接続不良、エンコーダ線の断線
→ エンコーダコネクタをしっかりと再接続して
ください。
または、ケーブルを交換してください。
運転中に時々
発生
AL53
AL54
多回転オ
ーバーフ
ロー*1
多回転デ
ータエラ
*1
ー
エンコーダの多
回転データが失
われた。
アブソリュート
エンコーダの多
回転カウンタが、
「 + 4095 ~ -
4096」回転(モー
タ軸)の範囲を超
えました。
→
→
購入後、初回電
源投入時に発
生
バッテリ電圧
低下ワーニン
グ発生中に制
御電源を遮断
した
エンコーダと
ドライバを接
続しないまま、
長期間放置し
た後に電源投
入をした。
→
制御回路電源
投入の時点で
発生
運転中に発生
モータの回転角 制御回路電源
加速度と回転速 投入の時点で
度 が 許 容 応 答 領 発生
域を超えました。
(ドライバ電源
オフ中にエンコ
ーダの許容を超
える速度で動い
た)
→
制御回路の異常
エンコーダ内部の破損
弊社営業所に連絡してください。
外来ノイズによる誤動作
「ノイズ対策」(P2-14)にそって、ノイズ対
策を行ってください。
エンコーダは多回転データを保持していませ
ん。
「テストモード:T08 多回転クリア」で多回
転クリアを実行してください。
バッテリを交換する。
「テストモード:T08 多回転クリア」で多回
転クリアを実行してください。電源再投入後、
原点出しの操作をしてください。
エンコーダコネクタ(CN1)の未接続、接続
不良
バッテリコネクタの未接続、接続不良
→ エンコーダコネクタ、バッテリコネクタを確
実に接続してください。
→
→
ドライバの制御回路の異常
エンコーダ内部の破損
弊社営業所に連絡してください。
ドライバの制御回路の異常
エンコーダ内部の破損
弊社営業所に連絡してください。
アクチュエータが一方向に回転し、多回転カ
ウンタが、「+4095~-4096」回転(モータ軸)
の範囲を超えて回転した。
→ 「テストモード:T08 多回転クリア」で多回
転クリアを実行してください。
ドライバの電源供給がないときに、アクチュ
エータが許容を超える速度で動いた。
→ 「テストモード:T08 多回転クリア」で多回
転クリアを実行してください。
ドライバの制御回路の異常
エンコーダ内部の破損
→ 弊社営業所に連絡してください。
11-8
2
3
4
5
6
7
8
9
10
11
トラブルシューティング
AL55
システム
ダウン*1
1
内容
付
11-1 アラームとその処置
1
2
アラーム
コード
AL60
3
4
アラーム
名称
偏差過大
内容
発生状況
処置
偏差カウンタ値
が、「SP49:許容
位置偏差」の設定
パルス数を超え
ました。
制御電源投入
中に発生
外力によりアクチュエータが動き、偏差過大
となった。
→ アクチュエータを停止して、再度電源を投入
してください。
→ アクチュエータを停止して、偏差クリアを実
施後、再度電源を投入してください。
ドライバの制御回路の異常
→ 弊社営業所に連絡してください。
ゲインが低い
→ 負荷状況にマッチするように、「調整モード」
の「AJ00:位置ループゲイン」「AJ01:速度
ループゲイン」「AJ02:速度ループ積分補償」
を調整してください。
電子ギヤの設定が不適切
→ 「SP44, 45:電子ギヤ設定」、「SP67:出力軸
分割機能設定」に対して、指令周波数が大き
い。適正な電子ギヤ設定にする。または、指
令周波数を修正してください。
「指令速度」が過大
→ 動作データの「指令速度」を下げてください。
負荷慣性モーメント(イナーシャ)が過大
→ 負荷の慣性モーメントの低減をはかってくだ
さい。
→ 動作データの加減速時定数の設定を大きくし
てください。
摩擦トルク、負荷トルクが大きい
→ 保持ブレーキが解放されていることを確認し
てください。
→ アクチュエータ出力トルクが負荷トルクに対
応できていることを確認してください。
「 RYn4 : 正 転 ス ト ロ ー ク エ ン ド 」 ま た は
「RYn5:逆転ストロークエンド」になってい
る。
→ 「RYn4:正転ストロークエンド」「RYn5:逆
転ストロークエンド」を 1 に設定してくださ
い。
モータケーブルの接続不良または相順が間違
っています。
→ モータケーブル線と端子部の接続不良をなお
してください。
→ 正しい相順で、モータ線と端子を接続してく
ださい。
エンコーダコネクタ(CN1)の接続不良
→ エンコーダコネクタをしっかりと再接続して
ください。
摩擦トルク、負荷トルクが大きい
→ 保持ブレーキが解放されていることを確認し
てください。
→ アクチュエータ出力トルクが負荷トルクに対
応できていることを確認してください。
動作パターン設定が不適切
→ 近回り動作を行い AL60 が発生した場合は、
アラームクリアが出来ません。アラームをク
リアするためにはドライバの電源を再投入し
てください。
加速中または
減速中に発生
5
6
加速中または
減速中に発生
7
8
指令に追従し
て速度が上が
らず、しばらく
して発生
9
10
アクチュエー
タが回転せず
に発生
トラブルシューティング
11
付
11-9
11-1 アラームとその処置
アラーム
コード
AL70
アラーム
内容
名称
メ モ リ 異 ドライバの RAM メモ
常(RAM) リに異常が発生しま
した。
AL71
メモリ異
常
( EEPR
OM)
AL72
FPGA
コンフィ
グエラー
AL73
FPGA 設
定エラー
AL76
プロセッ
サ異常
AL80
AL81
MEMOR
*2
Y エラー
システム
ダウン*2
発生状況
制御回路電
源投入の時
点で発生
運転中に発
生
ドライバの EEPROM 制 御 回 路 電
メモリに異常が発生
源投入の時
しました。
点で発生
運転中に発
生
ドライバの起動時に、 制御回路電源投
FPGA のイニシャラ 入の時点で発生
イズを正常に終了す
ることができません
でした。
ドライバの起動時に、 制御回路電源投
FPGA が正常に起動 入の時点で発生
できませんでした。
プロセッサ異常
-
制御回路電源投
入の時点で発生
-
ドライバの制御回路の異常
→ 弊社営業所に連絡してください。
2
3
ドライバの制御回路の異常
→弊社営業所に連絡してください。
4
ドライバの制御回路の異常
→ 弊社営業所に連絡してください。
5
ドライバの制御回路の異常
→ 弊社営業所に連絡してください。
6
ドライバの制御電源を再投入してくださ
い。
制御電源再投入しても復旧しない場合
は、弊社営業所に連絡してください。
アラーム発生時の状況によっては、読み
出し命令で読み出させるアラームコード
が不定になっていることがあります。
ドライバの制御回路、またはエンコーダ
の異常
→ 弊社営業所に連絡してください。
テストモード「T08:多回転データクリア」
を実行する。
バックアップ電池の電圧低下
→ 「本運転にあたって」(P3-21)を参照し、
バッテリを交換してください。
17bit アブソリュートエンコーダの異常
→ 弊社営業所に連絡してください。(アク
チュエータの交換)
ドライバ制御電源が通電中に CN1 が抜か
れた場合、このアラームになることがあ
ります。
記憶していた多回転
データは消去されま
す。
11-10
7
8
9
10
11
トラブルシューティング
17bit アブソリュート
エンコーダ内部の、
EEPROM メモリ異常
が発生しました。
SHA シ リ ー ズ
(SHA20 除く)
:アブ
ソリュートエンコー
ダ内部のバックアッ
プ用電源の電圧、また
は外部バッテリ電圧
のどちらか高いほう
の電圧が 2.85V 以下
になりました。
SHA20 、 FHA-Cmini
シリーズ:バックアッ
プバッテリの電圧が
2.85V 以 下 に な り ま
した。
1
処置
付
11-1 アラームとその処置
1
2
アラーム
コード
AL82
アラーム
名称
1 回転デ
ータ異常
内容
発生状況
処置
17bit ア ブ ソ リ ュ ー
トエンコーダが 2 箇
所で管理している 1
回転データに相違が
発生しました。
ア ク チュ エータ
動作後に発生
テストモード「T08:多回転データクリア」
を実行後、電源の再投入を行ってください。
多回転デ
ータ異常
17bit ア ブ ソ リ ュ ー
トエンコーダが 2 箇
所で管理している多
回転データに相違が
発生しました。
運転中に発生
外来ノイズによる誤動作
→「ノイズ対策」(P2-14)にそって、ノイズ
対策を行ってください
BUSY エ
*2
ラー
17bit ア ブ ソ リ ュ ー
トエンコーダの起動
時に、一定速度以上
の速度で動作してい
るため位置の特定が
できませんでした。
-
エンコーダ起動時に一定速度以上の速度
で動作している。
→ エンコーダ起動時は一定以下の動作速度
(停止が望ましい)で起動させてくださ
い。
SHA シリーズ(SHA20 除く):300r/min 以下
SHA20、FHA-Cmini シリーズ:250r/min 以下
*2
3
4
AL83
*2
5
6
AL84
7
17bit アブソリュートエンコーダの異常
→ 弊社営業所に連絡してください。(アク
チュエータの交換)
8
9
AL85
過熱エラ
ー
17bit ア ブ ソ リ ュ ー
トエンコーダ内部の
基板温度が 95℃以上
になりました。
-
10
トラブルシューティング
11
ドライバのヒートシ
ンク温度が 106℃以
上になりました。
-
エンコーダからの信
号をドライバが連続
で 4 回以上データを
受け取れませんでし
た。
-
付
AL86
通信エラ
ー*2
17bit アブソリュートエンコーダの異常
→ 弊社営業所に連絡してください。(アク
チュエータの交換)
17bit アブソリュートエンコーダ内部の基
板温度が 95℃以上になりました。
→ 急激な立ち上がりや放熱条件の改良な
ど、アクチュエータが過熱する要因を取
り除いてください。
17bit アブソリュートエンコーダの異常
→ 弊社営業所に連絡してください。(アク
チュエータの交換)
ドライバのヒートシンク温度が 106℃以
上になりました。
→ 急激な立ち上がりや放熱条件の改良な
ど、アクチュエータが過熱する要因を取
り除いてください。
エンコーダコネクタ(CN1)の不良
→ エンコーダコネクタが確実に挿入されて
いることを確認してください。
→ エンコーダのリード線が確実にはんだ処
理されていることを確認してください。
→ エンコーダの中継コネクタに接触不良が
ないか確認してください。
ノイズ等による誤動作
→ 接地線の接続が確実に行われていること
を確認してください。
→ エンコーダのシールド線の処理が確実に
行われていることを確認してください。
→ エンコーダ線はモータ線と同一でまとめ
られていないことを確認してください。
11-11
11-1 アラームとその処置
アラーム
コード
無灯
アラーム
名称
内容
発生状況
1
処置
短時間の停電等によりドライバ内部電源
回路の過負荷保護機能が動作した。
→ 制御電源を遮断し、1 分程度待ってから、
再度、制御電源を投入してください。
投入電源に異常がない
→ ドライバを交換してください。
*1: 17bit アブソリュートエンコーダ搭載のアクチュエータとの組み合わせでは発生しません。
*2: AL80~AL86:17bit アブソリュートエンコーダ搭載のアクチュエータとの組み合わせで発生する可能性があ
ります。なお、17bit エンコーダインクリメンタル仕様にて AL80~AL86 が発生し、制御電源を再投入して
も AL80~AL86 が再発する場合、17bit エンコーダの異常が考えられますので、弊社営業所に連絡してくだ
さい。
制御電源を投入して
も LED に表示ができ
ない。
制御回路電源投
入の時点で発生
2
3
4
5
6
7
8
9
10
トラブルシューティング
11
付
11-12
11-2 ワーニングとその処置
1
2
3
4
5
6
7
8
11-2 ワーニングとその処置
本ドライバは、保護機能が働く前に、その状態を出力するワーニング(警告)機能を備えています。
ワーニングになった場合は、表示部にワーニング No が表示され、CC-Link 回線にワーニングを出力し
ます。
ワーニング状態でもアクチュエータの制御はできますが、速やかにワーニングの原因を取り除いてく
ださい。(UA93:主回路電圧低下、UA99:接続アクチュエータ違いについては、発生時はアクチュエ
ータの制御はできません)
ワーニング一覧
表示されるアラームの一覧は下記のようになります。
ワーニング
コード
90
91
92
93
97
98
99
ワーニング名称
過負荷状態
バッテリ電圧低下
冷却ファン停止(HA-800C-6 のみ)*1
主回路電圧低下
正転禁止入力中
逆転禁止入力中
接続アクチュエータ違い
*1:HA-800C-24 には対応しておりません。
9
10
トラブルシューティング
11
付
11-13
11-2 ワーニングとその処置
1
ワーニング対処方法
各ワーニングについての詳細を説明します。
ワーニング
コード
UA90
UA91
UA92
過負荷状態
バッテリ電圧低下
冷却ファン停止
( HA-800C-6 の
み)
主回路電圧低下
内容
ドライバが過負荷状態で運転されています。
ワーニングを無視してアクチュエータを動作し続けると、過負荷エラー
(AL20)が発生します。過負荷アラームの項目を参照して処置を行ってく
ださい。
アブソリュートエンコーダのデータバックアップ用のバッテリ電圧が下記
に示す電圧まで低下しています。
アクチュエータは動作しますが、放置するとさらにバッテリの電圧が低下し
て、エンコーダのデータが保持できなくなります。速やかに新しいバッテリ
と交換してください。
SHA シリーズはドライバ電源供給中、エンコーダ内のバックアップキャパ
シタが十分に充電されると、バックアップバッテリは電圧低下を検出しませ
ん。
ドライバ電源 OFF 中、エンコーダ内のバックアップキャパシタが放電し、
低電圧になるまでは、バックアップバッテリの電圧低下を検出しません。
13bit アブソリュートエンコーダ
DC2.8V 以下(新しいバッテリと交換後自動復帰します。)
17bit アブソリュートエンコーダ(SHA20、FHA-Cmini シリーズ)
DC3.1V 以下(新しいバッテリと交換後自動復帰します。)
※ Ver2.08 以前では、バッテリ交換後、電源を再投入することで UA91
が解除されます。
17bit アブソリュートエンコーダ(SHA シリーズ(SHA20 除く))
DC3.1V 以下(新しいバッテリと交換後アラームリセットを実行し、電
源を再投入してください。)
(1)新しいバッテリと交換
(2)ドライバのアラームリセットを入力
(3)電源を再投入にて、ワーニングが解除されます。
本ドライバに搭載している冷却ファンが、何らかの理由により停止していま
す。
アクチュエータが定格トルクで運転されている場合、ドライバの内部素子
が、ジャンクション温度まで上昇する可能性があります。速やかに原因を取
り除いてください。
また、冷却ファンを連続使用する場合は、約 5 年で交換することをお勧めし
ます。
主回路電源の DC 電圧が下記に示す電圧以下に低下しています。
AC200V アクチュエータ
DC190V 以下(Ver2.02 以前は DC220V 以下)
AC100V アクチュエータ
DC70V 以下(Ver2.02 以前は DC100V 以下)
配線不良が考えられますので、「電源の接続」(P2-5)を参照し、適切な配
線としてください。
電源電圧が仕様範囲内でないことが考えられますので、状態表示 d10 主回
路電源電圧、または PSF-800 の状態表示から主回路電源電圧を確認し、電
源電圧を仕様範囲内に是正してください。
このワーニングが発生すると、サーボオフします。主回路電圧が復帰すると
ワーニングは自動的に解除されますが、サーボオンするためには、RYn0:
サーボ ON を 1 度 0 にした後、再度 1 にしてください。
11-14
3
4
5
6
7
8
9
10
11
トラブルシューティング
UA93
ワーニング名称
2
付
11-2 ワーニングとその処置
1
2
3
ワーニング
コード
ワーニング名称
UA97
正転禁止入力中
UA98
逆転禁止入力中
UA99
接続アクチュエー
タ違い
4
5
6
7
8
9
10
トラブルシューティング
11
付
11-15
内容
CC-Link RYn4:正転ストロークエンドが 0 の場合発生します。1 にしてく
ださい。
CC-Link RYn5:逆転ストロークエンドが 0 の場合発生します。1 にしてく
ださい。
本ドライバに設定されている適用アクチュエータと違うアクチュエータが
接続されています。
正しいアクチュエータを接続して電源を再投入してください。
対象アクチュエータ:17bit アブソエンコーダ(SHA シリーズおよび
FHA-Cmini シリーズ)、4 本線式インクリメンタルエンコーダ(FHA-C mini
シリーズ/FHA-C シリーズ)での機能です。
第
12章
別売品
ここでは、必要に応じて、ご購入いただく別売品について説明します。
12-1 別売品 ··········································································· 12-1
12-1 別売品
1
2
3
4
5
12-1 別売品
必要に応じて購入いただく別売品を説明します。
中継ケーブル
HA-800C ドライバは、定格出力電流とエンコーダタイプに応じ、機種を準備しています。ドライバと
アクチュエータおよび中継ケーブル(別売品)の組合せは次の通りです。
アクチュエータ
シリーズ
名
SHA
シリーズ
6
7
8
別売品
12
FHA-Cmini
シリーズ
FHA-C
シリーズ
RSF シ リ
ーズ
RSF/RKF
シリーズ
12-1
組み合わせドライバ
型番
電源
電圧
(V)
20
200
―
HA-800C-3D/E-200
―
25
200
―
HA-800C-3D/E-200
―
32
40
200
200
―
―
―
―
HA-800C-6D/E-200
HA-800C-6D/E-200
エンコーダ
タイプ
17bit
アブソリュート
HA-800C-1
HA-800C-3
HA-800C-6
25
100
―
―
HA-800C-6D/E-100
8
200
HA-800C-1C-200
―
―
11
200
HA-800C-1C-200
―
―
14
200
HA-800C-1C-200
―
―
8
100
HA-800C-1C-100
―
―
11
100
HA-800C-1C-100
―
―
14
100
HA-800C-1C-100
―
―
8
200
HA-800C-1D/E-200
―
―
11
200
HA-800C-1D/E-200
―
―
14
200
HA-800C-1D/E-200
―
―
8
100
HA-800C-1D/E-100
―
―
11
100
HA-800C-1D/E-100
―
―
14
100
HA-800C-1D/E-100
―
―
17
200
―
HA-800C-3C-200
―
25
200
―
HA-800C-3C-200
―
32
200
―
―
HA-800C-6C-200
40
200
―
―
HA-800C-6C-200
17
200
―
HA-800C-3A-200
―
25
200
―
HA-800C-3A-200
―
32
200
―
―
HA-800C-6A-200
40
200
―
―
HA-800C-6A-200
17
100
―
HA-800C-3C-100
―
25
100
―
―
HA-800C-6C-100
32
100
―
―
HA-800C-6C-100
17
100
―
HA-800C-3A-100
―
25
100
―
―
HA-800C-6A-100
32
100
―
―
HA-800C-6A-100
17
200
―
HA-800C-3B-200
―
20
200
―
HA-800C-3B-200
―
25
200
―
HA-800C-3B-200
―
32
200
―
―
HA-800C-6B-200
4 本省線
インクリメンタル
17bit
アブソリュート
4 本省線
インクリメンタル
13bit
アブソリュート
4 本省線
インクリメンタル
13bit
アブソリュート
14 本線
インクリメンタル
中継ケーブル
(別売品)
モータ線
EWD-MB**-A06-TN3
エンコーダ線
EWD-S**-A08-3M14
モータ線
EWC-M**-A06-TN3
エンコーダ線
EWC-E**-M06-3M14
モータ線
EWC-M**-A06-TN3
エンコーダ線
EWD-S**-A08-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-E**-B04-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-S**-B08-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-E**-B04-3M14
モータ線
EWC-MB**-M08-TN3
エンコーダ線
EWC-S**-B08-3M14
モータ線
EWA-M**-A04-TN3
エンコーダ線
EWA-E**-A15-3M14
12-1 別売品
アクチュエータ
シリーズ名
型番
SHA
シリーズ
電源電圧
(V)
40
200
58
200
65
200
組み合わせドライバ
エンコーダ
タイプ
HA-800C-24
HA-800C-24D/E
17bit
アブソリュート
HA-800C-24D/E
HA-800C-24D/E
1
中継ケーブル
(別売品)
2
モータ線
EWD-MB**-A06-TMC
エンコーダ線
EWD-S**-A08-3M14
モータ線
EWD-MB**-D09-TMC
エンコーダ線
EWD-S**-D10-3M14
3
中継ケーブル型式表記中の * * はケーブル長を示します。
3 種類の長さから選定してください。
03:3m、05:5m、10:10m
4
5
専用通信ケーブル
本ドライバとパソコンを接続するには、専用の通信ケーブルを使用して接続してください。
6
専用通信ケーブル
型式
仕様
EWA-RS03
D-sub9 ピン(メス)
1.6m
7
8
接続用コネクタ
本ドライバのCN1、CN2、モータ線接続、供給電源接続用コネクタは以下のようになります。
9
接続用コネクタ型式
CNK-HA80C-S1
CN1 用/CN2 用/モータ線接続用/供給電源接続用/CC-Link コネクタ 2 ヶ
CC-Link 分岐コネクタ
CNK-HA80C-S2
CN2 用/供給電源接続用/CC-Link コネクタ 2 ヶ/CC-Link 分岐コネクタ
CNK-HA80C-S1-A
CN1 用/CN2 用/CC-Link コネクタ 2 ヶ/CC-Link 分岐コネクタ
CNK-HA80C-S2-A
CN2 用/CC-Link コネクタ 2 ヶ/CC-Link 分岐コネクタ
型式
メーカ
型式
CN2 用
住友スリーエム
株式会社
コネクタ:
10120-3000PE
カバー:
10320-52F0-008
・・・4 種類
・・・4 種類
・・・3 種類
モータ線接続用
フェニックス・コンタクト
株式会社
供給電源接続用
フェニックス・コンタクト
株式会社
FKIC2,5/6-ST-5.08
FKC2,5/5-ST-5.08
CN4 用 CC-Link コネクタ
住友スリーエム株式会社
35505-6000-BOM GF
CN4 用 CC-Link 分岐コネクタ
住友スリーエム株式会社
35715-L010-B00 AK
12-2
10
11
12
別売品
メーカ
CN1 用
住友スリーエム
株式会社
コネクタ:
10114-3000PE
カバー:
10314-52F0-008
・・・6 種類
12-1 別売品
1
2
3
4
5
6
7
8
サーボパラメータ設定ソフトウェア(PSF-800)
パソコンから HA-800 ドライバへ各種サーボパラメータを、設定するためのソフトウェアです。HA-800
ドライバの「CN3」と「サーボパラメータ設定ソフトウェア PSF-800」をインストールしたパソコン
を EIA-232C ケーブルで接続して、ドライバの各種サーボパラメータを変更することができます。
ソフトウェアの詳細は、「10章 通信ソフトウェア」を参照ください。
なお、サーボパラメータ設定ソフトウェアは、弊社ホームページ(http://www.hds.co.jp/)からのダウ
ンロードが可能です。
型式
対応 OS
準備品
PSF-800
Windows® Xp, Windows Vista®*1, Windows® 7*1
専用通信ケーブル(EWA-RS03)
*1: Windows Vista®, Windows® 7 上で正常動作することを確認しておりますが、動作を保証するものではあり
ません。
* Microsoft, Windows、および IntelliMouse は、米国 Microsoft Corporation の、米国、日本およびその他の国に
おける登録商標または商標です。
* Windows の正式名称は、Microsoft Windows Operating System です。
動作データ設定ソフトウェア(PSF-680CL)
あらかじめ、移動量が分かっているアプリケーションに使用する場合、事前に動作データを作成し、
HA-800C に設定するソフトウェアです。HA-800 ドライバの「CN3」と「動作データ設定ソフトウェ
ア PSF-680CL」をインストールしたパソコンを EIA-232C ケーブルで接続して、動作データの設定、
変更、確認を行う事が出来ます。
なお、動作データ設定ソフトウェアは、弊社ホームページ(http://www.hds.co.jp/)からのダウンロー
ドが可能です。動作データ CC-Link 経由でも設定が可能です。
型式
PSF-680CL
対応 OS
Windows® ME, Windows® NT, Windows® 2000, Windows® Xp, Windows Vista®*1, Windows® 7*1
準備品
専用通信ケーブル(EWA-RS03)
*1: Windows Vista®, Windows® 7 上で正常動作することを確認しておりますが、動作を保証するものではあり
ません。
別売品
12
* Microsoft, Windows、および IntelliMouse は、米国 Microsoft Corporation の、米国、日本およびその他の国に
おける登録商標または商標です。
* Windows の正式名称は、Microsoft Windows Operating System です。
EWA-RS03
PSF-800:サーボパラメータ設定ソフトウエア
PSF-680CL:動作データ設定ソフトウエア
CN3
12-3
12-1 別売品
1
バックアップ用バッテリ
供給電源が遮断した場合に、アブソリュートエンコーダの多回転データを保持するためのバッテリで
す。アブソリュートエンコーダ仕様のドライバへ組込み済みで出荷します。
型式記号:HAB-ER17/33-2
バッテリ種類
リチウム電池
メーカー
日立マクセル株式会社
メーカー型式
ER17/33(3.6V 1600mAh)
2
3
4
データ保持時間
データ保持時間
電源遮断後約 1 年
条件
無使用状態、周囲温度:25℃、
軸停止状態、連続使用時(実際
の寿命は使用状態により変化
します。)
5
6
バッテリメーカーから単体購入した場合は、コネクタ配線および取り出し用リ
ボンは付属していません。同様の処理を施した上で使用してください。
7
8
モニタ用ケーブル
モニタ出力コネクタ CN9 に接続して速度、トルク等の信号をオシロスコープで測定する場合の信号ケ
ーブルです。
型式
10
EWA-MON01-JST4
11
4321
線色
1:赤
2:白
9
3:黒
12
4:緑
別売品
12-4
12-1 別売品
1
2
3
4
5
6
7
8
別売品
12
12-5
第
13章
CC-Link通信機能
ここでは、CC-Link 通信機能について説明します。
13-1
13-2
13-3
13-4
仕様·············································································· 13-1
配線方法 ······································································· 13-15
設定方法 ······································································· 13-17
通信プロファイル ··························································· 13-19
13-1 仕様
1
2
3
4
5
6
7
8
13-1 仕様
CC-Link 通信の仕様について説明します。
通信仕様
項目
局種類
適合 CC-Link バージョン
通信速度
通信方式
同期方式
符号化方式
伝送路形式
誤り制御方式
仕様
リモートデバイス局
Ver1.10
10M/5M/2.5M/625k/156kbps
ブロードキャストポーリング方式
フレーム同期方式
NRZI
バス形式(EIA RS-485 準拠)
CRC(X16+X12+X5+1)
CC-Link Ver1.10 対応ケーブル
接続ケーブル
(シールド付き 3 芯ツイストペアケーブル)
伝送フォーマット
HDLC 準拠
リモート局番
1~64
占有局数
1 局/2 局
通信速度
156kbps
625kbps
2.5Mbps
5Mbps
10Mbps
ケーブル長 最大ケーブル総延長
1200m
900m
400m
160m
100m
局間ケーブル長※
0.2m以上
接続台数
リモートデバイス局のみで最大 42 台 他機器との共用可能
※ CC-Link Ver1.00 対応ケーブルが混在する場合。ケーブル総延長と局間ケーブル長は Ver1.00 の仕様となり
ます。
12
通信機能
13
13-1
13-1 仕様
1
システム構成
システム構成例は以下のようになります。
HA-800C
CC-Link マスタユニット
2
HA-800C
HA-800C
3
4
最大 42 台*1
5
終端抵抗
6
アダプタ
7
コネクタ
L2
L1
Ln*2
メーカ
型式
8
終端抵抗
Ver1.10 対応ケーブル
コネクタ
35505-6000-BOM GF
3M
9
アダプタ
35715-L010-B00 AK
3M
10
*1:最大接続台数につきましては「最大接続台数について」(P13-18)を参照ください。
*2:ケーブル長は以下の条件を満たすように設計ください。
伝送速度
局間ケーブル長
(L1,L2)
156kbps
625kbps
2.5Mbps
5Mbps
10Mbps
20cm 以上
11
最大ケーブル長
(L1+L2+・・Ln)
1200m
900m
400m
160m
100m
12
通信機能
13
13-2
13-1 仕様
1
通信状態モニタLED
2
3
4
5
6
7
8
名称
LRUN
SD
RD
LERR
12
通信機能
13
13-3
説明
HA-800C が CC-Link ネットワークに参加している時に点灯します。
HA-800C が CC-Link 回線にデータを送信中に点灯します。
HA-800C が CC-Link 回線からデータを受信したときに点灯します。
以下の場合に点滅します。
① 局番、通信速度の設定に異常がある。
(PSF-680CL を接続するために局番設定を 70 にした場合は点灯します)
② 動作中に、局番設定を変えた。
③ 通信回線がノイズ等の影響により不安定
13-1 仕様
1
HA-800C CC-Link基本仕様
2
占有局数の違いによる HA-800C 機能の違い
HA-800C は 1 局占有か 2 局占有のいずれかを選択可能です。
以下の機能の違いから、HA-800C の占有局数を設定してください。
3
1 局占有
2 局占有
JOG 動作
32
×
128
○
速度制御
×
○
4
トルク制御
数値モニタ
同時取得可能数
×
Word×2
(16bit データ×2)
○
DWord×2
(32bit データ×2)
5
ポイントテーブル数
ポイントテーブル
ポイントテーブルとは、位置決め動作に必要となる「移動量(目標値)」、「回転速度」、「加減速時定
数」
、「移動量モード」の 4 つのデータをひとまとまりのポイントデータ(動作データ)を、HA-800C
に記憶させたものです。実際の位置決め動作は、CC-Link 通信からポイント No を指定して動作さ
せるます。
ポイントテーブルを使用する際には、「移動量モード設定」(P13-6)、タイミングチャート「起動」
(P13-48)を必ず参照してください。
No
移動量(目標値)
pulse
回転速度
pls/sec
加減速時定数
ms
移動量モード
0
1000
30000
1000
0
1
2000
20000
1000
0
2
・・・
3000
20000
1000
0
127
0
30000
1000
1
6
7
8
9
10
ポイントテーブルの編集
*1:「13-4 通信プロファイル」(P13-19)を参照してください。
*2:17bit アブソリュートエンコーダ搭載のアクチュエータでのみ使用できます。
*3:PSF-680CL を用いてポイントテーブル編集・動作を行う場合は、局番 70 への変更及び電源の
再投入が必要です。詳細については、PSF-680CL 操作マニュアルを参照してください。
13-4
11
12
13
通信機能
ポイントテーブルデータの編集は、
1. CC-Link 通信*1
2. PSF-800(HA-800C:Ver.3.00 以降、PSF-800:Ver.2.00 以降) *2
3. PSF-680CL*3
から行うことができます。
予め必要となるポイントデータが分かっている場合は、PSF-800 または PSF-680CL を用いて表形
式でポイントテーブルの編集が可能です。
動作毎に必要となるポイントテーブルデータが異なる、または 127 個以上のポイントデータが必要
(1 局占有時には 31 個)となる場合には、CC-Link 通信から動作前にポイントデータの編集を行って
ください。
なお、ポイントテーブル No.0 のデータは、RAM 上でのみ管理されるため、EEPROM には保存さ
れません。
13-1 仕様
1
2
3
4
5
ポイントテーブルデータ設定範囲
HA-800C でのポイントテーブルデータの設定範囲は下表の通りです。
設定値
移動量
回転速度*1
加減速時間*2
移動量モード
単位
pulse
pls/sec
ms
-
設定範囲
-2147483648 ~ 2147483647
125 ~ 2147483647
1 ~ 9999
0, 1, 2
*1:アクチュエータ毎に最高回転数が設定されていますので、回転速度の設定の際はご使用になられるアクチュ
エータの最高回転速度を確認の上、設定してください。また、出力軸分割機能有効時(SHA-CG シリーズで
SP67=0 以外) の設定範囲下限値は 1 となります。
*2:モータが最高速度まで加速する時間、及び最高速度から、停止(速度 0)まで減速する時間です。ポイント
テーブルに設定した速度までの加減速時間ではありません。
6
HA-800C では、現在値からの相対値で「2,147,483,646pls」までの移動距離しか動作
させることができません。この値を超えた動作指令となる条件で、RYn1:起動が 1 も
しくはポイントテーブル動作ウィンドウで移動開始が選択された場合には、
「RWrn+2:返答コード」に「0008h:書込み範囲エラー」が出力されます。
適用アクチュエータの最高回転速度以上の回転速度の設定も可能ですが、実際動作時
は、制御部にてアクチュエータの最高回転速度で動作は制限され、「AL10:過速度」、
「AL60:偏差過大」等のアラームとなる場合があります。ご使用になられるアクチュ
エータの最高回転数を確認の上、速度の値を設定してください。
7
8
12
通信機能
13
13-5
13-1 仕様
1
移動量モード設定
HA-800C では、以下の 3 つの移動量モードの機能を搭載しています。
1. 相対値指令
現在の停止位置からの移動量を設定し動作させる。
2. 絶対値指令
原点位置からの目標位置を設定し動作させる。近回り機能を使用することもできます。
3. 出力軸 1 回転内絶対値指令*1
回転方向を指定した原点位置からの出力軸 1 回転の動作範囲内での絶対値動作を行います。
2
3
移動量モード設定*2(CC-Link 通信書き込み命令コード RWwn+2 コード番号:8305h、9001h~907Fh)
設定値
機能
相対値指令
0
1
絶対値指令
2
出力軸 1 回転内絶対値指令
*1:HA-800 ソフトウェアバージョン 3.01 以降から使用可能です。
*2:PSF-800(Ver.2.00 以降)または PSF-680CL からも編集可能です。なお、PSF-680CL からは設定値「2」を設
定することはできません。
4
5
6
7
「SP67:出力軸分割機能設定」に応じて基準座標系は、以下のようになります。
SP67=0:NP00 pls/r
SP67=1:36000 pls/r
SP67=2:360000 pls/r
SP67=3:3600000 pls/r
インクリメンタルエンコーダ搭載アクチュエータで、電子ギヤ比「SP44/SP45」を
「1/1」以外に設定し、近回り機能を用いる場合には、「NP00:アクチュエータ分解
能」を以下のように設定してください。
NP00 = 出力軸分解能(NP00 初期値) ÷ 電子ギヤ比(SP44/45)
HA-800 ソ フ ト ウ ェ ア バ ー ジ ョ ン 2.11 ~ 3.00 未 満 で は 、 原 点 位 置 か ら ±
31bit(-2147483648~+2147483647pls)を超えて偏差クリア処理(CN2-4、CC-Link 通
信書込み命令(8020h))を実施した後、近回り動作を行うと「AL60:偏差過大」が発生
します。この場合アラームクリアできませんので、アラームをクリアしたい場合には
ドライバの電源を再投入してください。
8
9
10
11
12
通信機能
13
13-6
13-1 仕様
1
2
3
4
5
6
近回り機能
近回り機能とは、インデックステーブル等で回転角度を指定した動作を考えた場合に、現在値と目標
値の位置関係によって動作角度の短い方向へ回転する機能です。近回り機能の有効/無効は「NP17:近
回り有効/無効」で設定できます。(NP17=0:近回り機能無効、NP17=1:近回り機能有効)
近回り機能は、移動量モード設定が「絶対値(1)」の場合に「NP00:アクチュエータ分解能」で設定さ
れた基準座標系において機能します。近回り機能を有効にした場合には、最大で出力軸 180 度の動作
となります。
移動量設定がアクチュエータ分解能以上の場合には、
「移動量設定÷アクチュエータ分解能」の余りの
値を目標位置として動作します。
例)近回り機能
アクチュエータ分解能:6553600pls/r
アクチュエータ分解能が 360°に相当するものとして動作します。
例 1) 帰還パルス累積が 0、アクチュエータ 1 回転内位置が 0 から動作
NP17=0/1
NP17=0
移動量=819200
移動量=5734400
0°/360°
0°/360°
NP17=1
移動量=5734400
0°/360°
7
270°
90°
270°
90°
270°
90°
8
180°
180°
帰還パルス累積=819200
アクチュエータ 1 回転内位置
=819200
180°
帰還パルス累積=5734400
アクチュエータ 1 回転内位置
=5734400
帰還パルス累積=-819200
アクチュエータ 1 回転内位置
=5734400
例 2) 帰還パルス累積が 6553600、アクチュエータ 1 回転内位置が 0 から動作
NP17=0
NP17=1
NP17=0/1
移動量=819200
移動量=819200
移動量=5734400
0°/360°
0°/360°
0°/360°
12
270°
通信機能
13
90°
180°
帰還パルス累積=819200
アクチュエータ 1 回転内位置
=819200
13-7
270°
90°
180°
帰還パルス累積=7372800
アクチュエータ 1 回転内位置
=819200
270°
90°
180°
帰還パルス累積=5734400
アクチュエータ 1 回転内位置
=5734400
13-1 仕様
出力軸 1 回転内絶対値指令
絶対値指令での近回り動作の場合、出力軸で 180 度以内の動作となりますが、回転方向を指定するこ
とができません。
割り出し動作等で、回転方向を指定した動作を容易に実現するために、「出力軸 1 回転内絶対値指令」
では、移動量設定の、
「符号で回転方向を指定」
「値で出力軸 1 回転内の場所を指定」
し動作させる機能です。なお、出力軸 1 回転以上の動作を行いたい場合は、相対値指令もしくは絶対
値指令を使用してください。
移動量設定範囲は、
「SP67:出力軸分割機能設定」の設定によって以下のようになります。
設定値
移動量範囲
SP67=0
–NP00*~–1、+1~+NP00*
SP67=1
–36000~–1、+1~+36000(SHA-CG シリーズのみ)
–360000~–1、+1~+360000(SHA-CG シリーズのみ)
SP67=2
SP67=3
–3600000~–1、+1~+3600000(SHA-CG シリーズのみ)
*:「NP00:アクチュエータ分解能」
出力軸 1 回転内絶対値指令では、近回り設定が有効(NP17=1)の場合でも、近回り動
作とはならず、移動量設定の符号で設定された回転方向に動作します。
3
4
6
7
8
9
10
例)出力軸 1 回転内絶対値指令動作
SHA25A50CG(アクチュエータ分解能:6553600pls/r)、
「SP67:出力軸分割機能設定」が 0 の場合
移動量=-819200
0°/360°
2
5
移動量モード設定を出力軸 1 回転内絶対値指令とし、移動量が設定範囲外であった場合に、RYn1:起
動を 1 にすると、
「RWrn+2:返答コード」にエラーコード「0008h:書込み範囲エラー」がセットさ
れます。
※ HA-800 ソフトウェアバージョン 3.01 から使用できます。
移動量=+819200
1
11
0°/360°
12
270°
90°
13
90°
通信機能
180°
270°
180°
13-8
13-1 仕様
1
2
3
4
5
6
7
8
12
原点復帰動作について
HA-800C では、以下の 3 通りの原点復帰方法を選択することができます。
1. 原点センサドグ式原点復帰
原点信号(CN2-5:原点信号)とエンコーダ Z 相を用いて原点復帰動作を実施し、原点復帰完了
位置を原点(現在値を 0)とします。
2. 原点 Dog 信号ドグ式原点復帰
原点信号(RYn7:原点 Dog ON)とエンコーダ Z 相を用いて原点復帰動作を実施し、原点復帰完
了位置を原点(現在値を 0)とします。
3. データセット式原点復帰(インクリメンタルエンコーダのみ対応)
現在値を原点(現在値を 0)とします。
なお、アブソリュートエンコーダの場合、機械へアクチュエータを組み付けた際に、1 度原点セットを
行えば、基本的に以降の原点復帰動作は必要ありません。また、原点復帰動作を実施しても、現在値
は 0 となりません。アブソリュートエンコーダでの原点セットの詳細については、「原点セット」
(P4-8)または「原点セット」(P4-16)を参照してください。
各原点復帰方法の選択方法及び実行方法の概略
1. 原点センサドグ式原点復帰
① 「RWwn+2:命令コード 9207h(原点復帰方法の選択)」を「0」に設定してください。
② 「RWwn+2:命令コード 9208h(原点センサ選択)
」を「0」に設定してください。
③ 「RYn2:起動選択」を「1」に設定してください。
④ 「RYn0:サーボ ON 指令」を「1」に設定してください。
⑤ 「RYn1:起動」を「1」に設定すると、下図のように原点復帰動作が実行されます。
2. 原点 Dog 信号ドグ式原点復帰
① 「RWwn+2:命令コード 9207h(原点復帰方法の選択)」を「0」に設定してください。
② 「RWwn+2:命令コード 9208h(原点センサ選択)
」を「1」に設定してください。
③ 「RYn2:起動選択」を「1」に設定してください。
④ 「RYn0:サーボ ON 指令」を「1」に設定してください。
⑤ 「RYn1:起動」を「1」に設定すると、下図のように原点復帰動作が実行されます。
3. データセット式原点復帰(インクリメンタルエンコーダのみ)
① 「RWwn+2:命令コード 9207h(原点復帰方法の選択)」を「1」に設定してください。
② 「RYn2:起動選択」を「1」に設定してください。
③ 「RYn0:サーボ ON 指令」を「1」に設定してください。
④ 「RYn1:起動」を「1」に設定すると、現在値を原点に設定します。
なお、
「原点復帰方法の選択」
、「原点センサ選択」
、「原点復帰速度 1」
、「原点復帰速度 2」
、
「原点復帰
加減速時間」
、
「原点復帰方向」
、「仮想原点」は、PSF-800 または PSF-680CL を用いて設定すること
もできます。
通信機能
13
13-9
13-1 仕様
1
例)原点センサドグ式原点復帰、または、原点 Dog 信号ドグ式原点復帰での動作例
2
準備完了(RXn0)
原点復帰速度 1
3
原点復帰速度 2
速度
原点復帰加減速時間
4
仮想原点
原点信号*1
5
Z相
6
原点復帰完了(RXn2)*2
*1:
「RWwn+2:命令コード 9208h(原点センサ選択)」で、原点センサ「CN2-5:原点信号」と CC-Link
通信「RYn7:原点 Dog ON」を選択します。
*2:RXn2:原点復帰完了は、原点復帰動作中に「0」となり、原点復帰完了後に「1」となります。エ
ンコーダ関係のアラームが発生している状態では、RXn2:原点復帰完了は「0」となります。イ
ンクリメンタルエンコーダの場合、電源投入時に RXn2:原点復帰完了は「0」になっています。
また、アブソリュートエンコーダの場合、電源投入時に RXn2:原点復帰完了は「1」になってい
ます。なお、原点復帰完了が「0」の場合にも通常動作を実施することができます。
原点復帰動作においても「SP50:指令極性」、電子ギヤ(「SP67:出力軸分割機能
設定」
(SHA-CG シリーズのみ)を含む)、
「S68:電子ギヤ機能設定」が機能します
ので、原点復帰速度、原点復帰加減速時間、原点復帰方向、仮想原点の設定の際は、
注意してください。
アブソリュートエンコーダ搭載アクチュエータにおいても、原点センサドグ式原点
復帰、原点 Dog 信号ドグ式原点復帰を実施できますが、原点復帰完了位置は原点(現
在値を 0)とはなりません。
7
8
9
10
11
12
通信機能
13
13-10
13-1 仕様
1
2
3
4
5
6
7
8
ネットワークパラメータ一覧
次のパラメータの設定・表示は、専用通信ソフト PSF-800 または PSF-680CL、CC-Link 通信による操
作で行います。ここでは、パラメータの内容*1 について説明します。
NP
PSF-800 上の名称
PSF-680CL 上の名称
CC-Link 通信上の名称
初期値
NP00*2 アクチュエータ分解能
分解能
アクチュエータ一回転移動量
*3
NP02
原点復帰速度 1
原点復帰速度 1
原点復帰速度 1
200000
NP04
原点復帰速度 2
原点復帰速度 2
原点復帰速度 2
20000
NP05
原点復帰加減速時間
原点復帰加減速
原点復帰加減速時定数
1000
原点復帰方向
原点復帰方向
原点復帰方向
NP06
0
NP07*2 仮想原点
仮想原点
仮想原点
0
4
NP08*
RXn1 最小 OFF 時間
動作完了(RXn1)OFF 時間
0
バックラッシュ補正
バックラッシュ補正
バックラッシュ補正値
NP09
0
NP17
近回り有効/無効
近回り
近回り有効無効
0
NP18
原点復帰方法
原点復帰方法
原点復帰方法
0
原点センサ選択
原点センサー選択
原点センサー選択
NP19
0
*1:PSF-800、PSF-680CL、CC-Link 通信上で各パラメータの名称が異なっているものがありますが、機能とし
ては同一です。
*2:「NP00:アクチュエータ分解能」、「NP07:仮想原点」は、電源の再投入後に有効になります。
*3:適用アクチュエータによって異なります。
*4:「NP08:RXn1 最小 OFF 時間」は、PSF-680CL から変更することはできません。
NP00:アクチュエータ分解能
近回り機能を用いる場合の基準となる座標系の決定するためのパラメータです。近回り機能の詳細に
ついては、「NP17:近回り有効/無効」
(P13-14)を参照してください。
弊社出荷時には、適用アクチュエータに合わせた「出力軸分解能」が設定されています。詳細につい
ては、各アクチュエータの技術資料を参照してください。
設定値
機能
10~2147483647
近回り機能での基準座標系を設定します。
12
13
通信機能
13-11
単位
パルス/
回転
初期値
*
電子ギヤ(SP44/SP45)を「1/1」以外に設定し、近回り機能を用いる(NP17=1)場合
は、必ず
「NP00:アクチュエータ分解能」=出力軸分解能 ÷ 電子ギヤ(SP44/SP45)
と設定してください。
上記以外の場合には NP00 は初期値から変更しないで下さい。
13-1 仕様
1
NP02:原点復帰速度 1
NP04:原点復帰速度 2
NP05:原点復帰加減速時間
NP06:原点復帰方向
NP18:原点復帰方法
NP19:原点センサ選択
2
3
原点復帰動作時の動作速度、加減速時間、原点復帰方向、原点復帰方法、原点センサ選択を指定しま
す。原点復帰動作の詳細については「原点復帰動作について」(P13-9)を参照してください。
5
NP02:原点復帰速度 1
設定値
125~2147483647
機能
原点復帰動作時の速度を指定します。
単位
pls/sec
初期値
200000
単位
pls/sec
初期値
20000
機能
原点復帰動作時の加減速時間を指定し
ます。
単位
初期値
ms
1000
8
機能
正転方向へ向けて原点復帰動作を行い
ます。
逆転方向へ向けて原点復帰動作を行い
ます。
単位
初期値
9
-
0
機能
原点信号とエンコーダ Z 相を用いて原
点復帰動作を行います。
現在値を原点とします。
単位
初期値
-
0
単位
初期値
-
0
6
NP04:原点復帰速度 2
設定値
125~32767
機能
原点復帰動作時の速度を指定します。
7
NP05:原点復帰加減速時間
設定値
1~9999
NP06:原点復帰方向
設定値
0
1
10
NP18:原点復帰方法
設定値
0
1
11
12
NP19:原点センサ選択
設定値
1
機能
原点信号に CN2-5:原点信号を用いま
す。
原点信号に RYn7:原点 Dog ON を用
います。
13
通信機能
0
4
「SP44,45 電子ギヤ分子/分母」
、「SP67:出力軸分割機能設定」を変更した場合、
変更前の動作とは移動量、速度、加減速時間が大きく変化しますので、動作を行う
前に必ず原点復帰動作の設定を確認/修正して下さい。
13-12
13-1 仕様
1
2
3
NP07:仮想原点
原点復帰動作時の Z 相信号からの動作量を設定します。原点復帰動作の詳細については「原点復帰動
作について」
(P13-9)を参照してください。
また、アブソリュートエンコーダを使用する場合には、アクチュエータ・ドライバと機械原点を関係
付けるための原点データを設定します。原点セットの詳細については「原点セット」
(P4-8)または「原
点セット」(P4-16)を参照してください。
設定値
4
5
6
7
-262144~262143
機能
原点復帰動作時の Z 相信号からの動作
量を設定します。
アブソリュートエンコーダを使用する
場合、アクチュエータ・ドライバと機
械原点を関係付けるための原点データ
を設定します。
単位
初期値
パルス
0
NP08:RXn1 最小OFF時間
起動(RYn1)を ON した後、動作完了(RXn1)が OFF する最小時間を設定します。動作例について、
後述のタイミングチャート「起動」(P13-48)を参照してください。
8
設定値
0~32767
機能
起動(RYn1)を ON した後、動作完了
(RXn1)が OFF する最小時間を設定
します。
単位
初期値
ms
0
NP09:バックラッシュ補正
12
移動方向が原点復帰方向と同じ方向へと反転した場合、指令値からバックラッシュ補正値を減算しま
す。
移動方向が原点復帰方向と逆方向へと反転した場合、指令値にバックラッシュ補正値を加算します。
通信機能
13
装置にバックラッシュ(ガタ)がある場合、アクチュエータの移動方向が反転するたびに設定値を加
減算し、バックラッシュを補正し位置決め精度を向上させることができます。
「NP06:原点復帰方向」、「NP07:仮想原点」の設定を基準に、バックラッシュ補正値を指令値から
加算もしくは減算します。
なお、出力軸分割有効時(SHA-CG シリーズで SP67=0 以外)は、バックラッシュ補正は機能しません。
設定値
0~32767
13-13
機能
バックラッシュ補正値を設定します。
単位
パルス
初期値
0
13-1 仕様
1
NP17:近回り有効/無効
インデックステーブル等で回転角度を指定した動作を考えた場合に、現在値と目標値の位置関係によ
って動作角度の短い方向へ回転する機能です。
近回り機能は、移動量モード設定が「絶対値」の場合に有効となります。近回り機能を有効にした場
合には、最大で出力軸 180 度の動作となります。
設定値
0
1
機能
近回り機能を無効とする。
近回り機能を有効とする。
単位
初期値
-
0
2
3
4
5
電子ギヤ(SP44/SP45)を「1/1」以外に設定し、近回り機能を用いる(NP17=1)場合
は、必ず
「NP00:アクチュエータ分解能」=出力軸分解能 ÷ 電子ギヤ(SP44/SP45)
と設定してください。
6
7
8
9
10
11
12
通信機能
13
13-14
13-2 配線方法
1
2
3
4
13-2 配線方法
終端抵抗について
終端抵抗は CC-Link マスタ側に 1 個、終端サーボドライバ側に各 1 個づつ取り付けます。
CC-Link マスタユニット
HA-800C
HA-800C
HA-800C
5
6
7
アダプタ
8
コネクタ
CC-Link
マスタユニット
終端抵抗
DA
終端抵抗
DB
DG
SLD
FG
12
通信機能
13
CC-Link に使用することのできる終端抵抗の仕様は下記のようになります。
使用ケーブル
Ver.1.10 対応 CC-Link 専用ケーブル
Ver.1.00 対応 CC-Link 専用ケーブル
Ver.1.10 対応 CC-Link 専用高性能ケーブル
13-15
終端抵抗
110Ω±5% 1/2W
110Ω±5% 1/2W
130Ω±5% 1/2W
13-2 配線方法
1
CC-Linkコネクタの配線方法
1
2
2
ケーブルのシースをむいて内部の電線とシールド編組を選り分けます。
シールド線と、リード線をコネクタ(35505-6000-BOM GF)に差込み圧接します。
圧接
3
シールド編組
SLD
4
黄 白 青
5
3芯ツイストペアケーブル
6
7
3
最終軸の場合、CC-Link マスタユニットに付属している終端抵抗器を次のように加工して、コネクタ
(35505-6000-BOM GF)の DA,DB に間に圧接します。
終端抵抗器
(10mm)
(10mm)
被覆をぬく
リード線を曲げる
8
9
10
切る
リード線
11
12
コネクタ
通信機能
13
13-16
13-3 設定方法
1
2
3
4
13-3 設定方法
CC-Link 通信の設定方法について説明します。
局番のつけ方
局番は、サーボアンプの電源を投入する前に設定してください。電源 ON 中に設定した場合は、L ERR
LED(赤色)が点滅します
1
局番は 1~64 の範囲で設定してください。
他の CC-Link 機器の局数を確認の上局番設定してください。
70 番を設定して電源を投入した場合は、PSF-680CL との通信モード、90 番を設定して電源を
投入した場合は 内部 EEPROM 初期化モードになります。
5
6
×10(10 の位を設定します)
7
×1(1 の位を設定します)
8
ロータリスイッチ
設定値
1~64
70
90
12
2
13
説明
局番をあらわし、CC-Link 通信を行います。
PSF-680CL Ver2.00 との通信を行います。
動作データをクリアします。
当サーボドライバ HA-800C は 1 台で 1 局または 2 局占有します。
通信機能
1 局占有(弊社出荷時設定)
2 局占有
13-17
13-3 設定方法
3
1
ボーレートを設定します。
No
0
1
2
3
4
5~9
ボーレート
156kbps (弊社出荷時設定)
625kbps
2.5Mbps
5Mbps
10Mbps
使用しません
電源投入後の局番・占有局数・ボーレートの変更は無効であり、L ERR LED が点滅し
ます。
2
3
4
5
6
7
最大接続台数について
最大接続台数「42 台」は、次の条件を満たす必要があります。
8
{(1×a)+(2×b)+(3×c)+(4×d)}≦64
a:1 局占有ユニットの台数
b:2 局占有ユニットの台数
c:3 局占有ユニットの台数 (HA-800C にはありません)
d:4 局占有ユニットの台数 (HA-800C にはありません)
9
10
{(16×A)+(54×B)+(88×C)}≦2304
A:リモート I/O 局の台数
≦64 台
B:リモートデイバイス局の台数 ≦42 台
C:ローカル局の台数
≦26 台
11
例.接続台数が 4 台の場合、次のように局番を設定できます。
CC-Link
マスタユニット
HA-800C
リモートデバイス局
(2 局占有時)
他社サーボアンプ 1
リモートデバイス局
(2 局占有時)
第1局
第2局
第4局
他社サーボアンプ 2
リモートデバイス局
(2 局占有時)
12
13
第6局
通信機能
リモート I/O 局
(1 局占有)
接続台数は 4 台
13-18
13-4 通信プロファイル
1
2
3
4
13-4 通信プロファイル
HA-800C は、1 局または 2 局占有で動作しています。通信プロファイルは以下のようになります。
入出力信号(入出力ディバイス)RX・RY、RWw・RWr
1 局占有
HA-800C→マスタ
デバイス No
信号名称
RXn0
RYn0
サーボ ON 指令
RXn1
動作完了
RYn1
起動
RXn2
原点復帰完了
RYn2
起動選択
RXn3
トルク制限中
RYn3
トルク制限
RXn4
正転ストロークエンド中
RYn4
正転ストロークエンド
RXn5
逆転ストロークエンド中
RYn5
逆転ストロークエンド
RXn6
バッテリー電圧低下
RYn6
未使用
RXn7
サーボアラーム
RYn7
原点 Dog ON
RXn8
モニタ中
RYn8
モニタ実行要求
RXn9
命令コード完了
RYn9
命令コード実行要求
RXnA
現在ポイントテーブル
bit0
RYnA
ポイントテーブル No 選択
bit0
RXnB
現在ポイントテーブル
bit1
RYnB
ポイントテーブル No 選択
bit1
RXnC
現在ポイントテーブル
bit2
RYnC
ポイントテーブル No 選択
bit2
RXnD
現在ポイントテーブル
bit3
RYnD
ポイントテーブル No 選択
bit3
RXnE
現在ポイントテーブル
bit4
RYnE
ポイントテーブル No 選択
bit4
RXnF
RX(n+1)0
・
・
RX(n+1)9
動作データ指示エラー
RX(n+1)A
RX(n+1)B
6
7
8
通信機能
13
デバイス No
信号名称
準備完了(Ready)
5
12
マスタ→HA-800C
RX(n+1)C
・
・
RX(n+1)F
RYnF
RY(n+1)0
・
・
RY(n+1)9
減速停止
エラー状態フラグ
RY(n+1)A
エラーリセット要求フラグ
リモート READY
RY(n+1)B
未使用
予約
RY(n+1)C
・
・
RY(n+1)F
予約
予約
HA-800C→マスタ
マスタ→HA-800C
アドレス
内容
デフォルト
RWrn
モニタ 1 データ
RWrn+1
モニタ 2 データ
RWrn+2
RWrn+3
13-19
予約
アドレス
内容
デフォルト
--
RWwn
モニタ 1
--
--
RWwn+1
モニタ 2
--
返答コード
--
RWwn+2
命令コード
--
読み出しデータ
--
RWwn+3
書込みデータ
--
13-4 通信プロファイル
1
2 局占有
HA-800C→マスタ
デバイス No
マスタ→HA-800C
デバイス No
信号名称
2
信号名称
RXn0
準備完了(Ready)
RYn0
サーボ ON 指令
RXn1
動作完了
RYn1
起動
RXn2
原点復帰完了
RYn2
起動選択
RXn3
トルク制限中
RYn3
トルク制限
RXn4
正転ストロークエンド中
RYn4
正転ストロークエンド
RXn5
逆転ストロークエンド中
RYn5
逆転ストロークエンド
RXn6
バッテリー電圧低下
RYn6
未使用
RXn7
サーボアラーム
RYn7
原点 Dog ON
RXn8
モニタ中
RYn8
モニタ実行要求
RXn9
命令コード完了
RYn9
命令コード実行要求
RXnA
現在ポイントテーブル
bit0
RYnA
ポイントテーブル No 選択
bit0
3
4
5
RXnB
現在ポイントテーブル
bit1
RYnB
ポイントテーブル No 選択
bit1
RXnC
現在ポイントテーブル
bit2
RYnC
ポイントテーブル No 選択
bit2
RXnD
現在ポイントテーブル
bit3
RYnD
ポイントテーブル No 選択
bit3
RXnE
現在ポイントテーブル
bit4
RYnE
ポイントテーブル No 選択
bit4
RXnF
RX(n+1)0
・
・
RX(n+1)F
動作データ指示エラー
RX(n+2)0
現在ポイントテーブル
bit5
RX(n+2)1
現在ポイントテーブル
bit6
RX(n+2)2
RYnF
RY(n+1)0
・
・
RY(n+1)F
減速停止
RY(n+2)0
ポイントテーブル No 選択
bit5
RY(n+2)1
ポイントテーブル No 選択
bit6
未使用
RY(n+2)2
未使用
RX(n+2)3
速度制御実行中
RY(n+2)3
速度制御切り替え
RX(n+2)4
トルク制御実行中
RY(n+2)4
トルク制御切り替え
RX(n+2)5
ゼロ速度出力
RY(n+2)5
JOG 動作
RX(n+2)6
速度到達出力
RY(n+2)6
JOG 回転方向
RX(n+2)7
トルク到達出力
RY(n+2)7
未使用
未使用
RY(n+2)8
・
・
RY(n+2)F
未使用
RX(n+3)0
・
・
RX(n+3)9
予約
RY(n+3)0
・
・
RY(n+3)9
予約
RX(n+3)A
エラー状態フラグ
RY(n+3)A
エラーリセット要求フラグ
RX(n+3)B
RX(n+3)C
・
・
RX(n+3)F
リモート READY
RY(n+3)B
RY(n+3)C
・
・
RY(n+3)F
未使用
RX(n+2)8
・
・
RX(n+2)F
未使用
7
8
未使用
9
10
11
12
13
通信機能
予約
6
予約
13-20
13-4 通信プロファイル
1
2
3
4
5
6
スレーブ→マスタ
マスタ→スレーブ
アドレス
内容
デフォルト
アドレス
RWrn
モニタ 1 データ下位 16bit
--
RWwn
モニタ 1
--
RWrn+1
モニタ 1 データ上位 16bit
--
RWwn+1
モニタ 2
--
RWrn+2
返答コード
--
RWwn+2
命令コード
--
RWrn+3
読み出しデータ
--
RWwn+3
書込みデータ
--
RWrn+4
未使用
--
RWwn+4
速度指令
--
RWrn+5
モニタ 2 データ下位 16bit
--
RWwn+5
トルク指令
--
RWrn+6
モニタ 2 データ上位 16bit
--
RWwn+6
JOG 動作速度
--
RWrn+7
未使用
--
RWwn+7
JOG 動作加減速時定数
--
12
通信機能
13
デフォルト
入出力信号の詳細RX・RY、RWw・RWr
出力信号 RX
HA-800C⇒マスタ(RXn)
デバイス No
1 局占有
信号名称
2 局占有
RXn0
RXn0
準備完了
RXn1
RXn1
動作完了
RXn2
RXn2
原点復帰完了
RXn3
RXn3
トルク制限中
RXn4
RXn4
正転ストロークエンド中
RXn5
RXn5
逆転ストロークエンド中
RXn6
RXn6
バッテリー電圧低下
RXn7
RXn7
サーボアラーム・ワーニング
RXn8
RXn8
モニタ中
RXn9
RXn9
命令コード完了
7
8
内容
13-21
内容
サーボ ON して、運転可能状態の時に 1 になります。
現在の停止位置が、位置決め動作で指定した位置に
対して、調整モード 1 AJ04:位置決め完了範囲で
設定された範囲内の場合 1 になります。
本信号については本章後述のタイミングチャート
「起動」も参照してください。
電源投入後に位置決め動作前、または原点復帰動作
前には、0 となります。
HA-800C ドライバが原点を認識している場合は 1
になります。(HA-800C-*A/D の場合は電源投入後
1 になります)
原点復帰動作の詳細は、「原点復帰動作について」
(P13-9)を参照してください。
RYn3:トルク制限が 1 になり、出力トルクが、調
整モード 1:AJ11 トルク制限値で設定された値に制
限されているときに 1 になります。
RYn4:正転ストロークエンドが 0 の時、1 になり
ます。
RYn5:逆転ストロークエンドが 0 の時、1 になり
ます。
エンコーダバックアップ用のバッテリーが電圧低
下した場合に、1 が出力されます。(HA-800C-*A/D)
HA-800C がアラームまたはワーニング発生中であ
ることを示します。
アラームリセット可能なアラームは、書き込み命令
コード「8010h:アラームリセット」によりリセッ
トが可能です。詳細は「11章 トラブルシューティ
ング」を参照してください。
RYn8:モニタ実行要求が 1 になり、RWwn:モニ
タ 1、RWwn+1:モニタ 2 で指定されたモニタコー
ドのモニタを実行中の時に 1 になります。
RYn9:命令コード実行要求を 1 にして、RWwn+2:
命令コードで指定された命令の実行が完了した時
に 1 になります。
13-4 通信プロファイル
デバイス No
1 局占有
2 局占有
信号名称
RXnA
RXnA
現在ポイントテーブル Bit0
RXnB
RXnB
現在ポイントテーブル Bit1
RXnC
RXnC
現在ポイントテーブル Bit2
RXnD
RXnD
現在ポイントテーブル Bit3
RXnE
RXnE
現在ポイントテーブル Bit4
RXnF
RXnF
動作データ指示エラー
RX(n+2)0
現在ポイントテーブル Bit5
RX(n+2)1
現在ポイントテーブル Bit6
RX(n+2)3
速度制御実行中
RX(n+2)4
トルク制御実行中
RX(n+2)5
ゼロ速度出力
速度到達出力
RX(n+2)7
トルク到達出力
RX(n+1)A
RX(n+3)A
エラー状態フラグ
RX(n+1)B
RX(n+3)B
リモート READY
RYnA~RYnE:ポイントテーブル No 選択 bit0~4
で選択された動作データの実行が完了して、停止位
置が、位置決め動作で指定した位置に対して、調整
モード 1 AJ04:位置決め完了範囲で設定された
範囲内の場合実行した動作データの番号に該当す
るビットが 1 になります。
RXnA~RXnE は、RXn1 と同じタイミングで動作
します。
RXn1=0 の時、RXnA~RXnE は、"00000"となりま
す。これはポイントデータ 0 の動作完了と同一パ
ターンです。
データが設定されていないときに、1 がセットされ
ます。1 局占有時 RY(n+1)A、2 局占有時 RY(n+3)A:
エラーリセット要求フラグによりリセット可能で
す。
RXnA~RXnE と同じです。2 局占有の場合は、全
部で 127 通りの動作データが設定可能です。
RY(n+2)3:速度制御切り替えが 1 になり、速度制
御による動作が実行されている時に 1 になります。
RY(n+2)4:トルク制御切り替えが 1 になり、トル
ク制御による動作が実行されている時に 1 になり
ます。
モータ速度が、調整モード 1 AJ07:零速度判定
値で設定された値以下になった時に、1 になりま
す。
位置制御から速度制御に切り替える場合
(RY(n+2)3:速度制御切り替え⇒1)、位置制御か
らトルク制御に切り替える場合(RY(n+2)4:トル
ク制御切り替え⇒1)及び、速度制御またはトルク
制御から位置制御に切り替える場合は、このビット
が 1 にならないと切り替えることができません。
モータ速度が、調整モード 1 AJ05:速度到達判
定値で設定された値以上になった時に、1 になりま
す。
モータトルクが、調整モード 1 AJ06:トルク到
達判定値で設定された値以上になった時に、1 にな
ります。
プロファイルに従ってコマンドが送信されない場
合に 1 になります。エラーリセット要求フラグに
よりリセット可能です。エラーが発生しエラー状態
フラグがセットされた場合、制御電源 OFF または
エラーリセットまでエラー状態フラグは保持され
ます。
エラー状態フラグ(RX(n+1)A)=0 かつ サーボアラ
ーム・ワーニング(RXn7)=0 かつ エラーリセッ
ト要求フラグ(RY(n+1)A)=0 のとき、リモート
READY が 1 になります。
13-22
2
3
4
5
6
7
8
9
10
11
12
13
通信機能
RX(n+2)6
1
内容
13-4 通信プロファイル
1
2
3
4
入力信号 RY
マスタ⇒HA-800C(RYn)
デバイス No
2 局占有
1 局占有
信号名称
RYn0
RYn0
サーボ ON
RYn1
RYn1
起動
RYn2
RYn2
起動選択
RYn3
RYn3
トルク制限
RYn4
RYn4
正転ストロークエンド
RYn5
RYn5
逆転ストロークエンド
RYn6
RYn6
予約
RYn7
RYn7
原点 DogON
5
6
7
8
12
通信機能
13
13-23
内容
制御/主回路電源が投入され、「RXn7:サーボアラ
ーム」が 0 の時に 1 にするとサーボ ON します。
正常にサーボ ON した場合は「RXn0:準備完了」
が 1 になります。
RYn2:起動選択が 1 の時に、このビットを 1 にす
ると、原点復帰を実行します。
RYn2:起動選択が 0 の時に、このビットを 1 にす
ると、RYnA~RYnE:ポイントテーブル No 選択
bit0~bit4(2 局占有時は、RYnA~RYnE:ポイン
トテーブル No 選択 bit0~bit4 と、RY(n+2)0、
RY(n+2)1:ポイントテーブル No 選択 bit5~bit6)
で選択されている動作データで指定された動作を
実行します。
RYn1:起動を 1 にした時、このビットが 1 の場合
は原点復帰を実行します。0 の場合は位置決め動作
を実行します。
原点復帰動作の詳細は、「原点復帰動作について」
(P13-9)を参照してください。
このビットが 1 の時、出力トルクを調整モード 1
AJ11:トルク制限値で設定された値に制限します。
正転側のストロークエンド入力です。0 の場合正転
側にトルクを発生せず、ワーニング 97:正転禁止
入力中が発生します。
また位置制御および速度制御の場合は、「SP65:
正転/逆転禁止時動作」にて禁止時の動作をサーボ
ロックに変更することが可能です。
逆転側のストロークエンド入力です。0 の場合逆転
側にトルクを発生せず、ワーニング 98:逆転禁止
入力中が発生します。
また位置制御および速度制御の場合は、「SP65:
正転/逆転禁止時動作」にて禁止時の動作をサーボ
ロックに変更することが可能です。
予約ビットです。0 でお使いください。
原点復帰方法が 0 かつ原点センサ選択が 1 の時の、
原点センサの信号ビットです。1 でセンサ ON、0
でセンサオフとなるように、センサ状態を入力して
ください。
原点復帰動作の詳細は、「原点復帰動作について」
(P13-9)を参照してください。
13-4 通信プロファイル
デバイス No
1 局占有
RYn8
信号名称
2 局占有
RYn8
モニタ出力実行要求
RYn9
RYn9
命令コード実行要求
RYnA
RYnA
ポイントテーブル No 選択
bit0
RYnB
RYnB
ポイントテーブル No 選択
bit1
RYnC
RYnC
ポイントテーブル No 選択
bit2
RYnD
RYnD
ポイントテーブル No 選択
bit3
RYnE
RYnE
ポイントテーブル No 選択
bit4
RYnF
RYnF
減速停止
RY(n+2)0
ポイントテーブル No 選択
bit5
RY(n+2)1
ポイントテーブル No 選択
bit6
速度制御切り替え
1 に設定すると、RWwn:モニタ 1、RWwn+1:モ
ニタ 2 にセットされているモニタコードに該当す
るモニタを実行し、モニタ値を RWrn:モニタ 1 デ
ータ、RWrn+1 モニタ 2 データ(2 局占有時は、
RWrn:モニタ 1 データ下位 16bit、RWrn+1:モニ
タ 1 データ上位 16bit 及び、RWrn+5:モニタ 2 デ
ータ下位 16bit、RWrn+6:モニタ 2 データ上位
16bit)に出力し続けます。また、出力中は、RXn8:
モニタ中が 1 になります。
出力されるデータは、CC-Link の通信周期毎に更新
されます。
1 に設定すると、RWwn+2:命令コードに設定され
た命令を実行します。実行が完了すると、RXn9:
命令コード完了が 1 になります。
2
RYn2:起動選択が 0 の状態で、RYn1:起動が 1
の時、このビットで指定された動作データが実行さ
れます。
動作データ実行中に他の動作データで起動した場
合は後に起動した動作データが実行されます。
6
アクチュエータの動作中にこのビットを 1 にする
と、その時の動作状態により、以下の動作となりま
す。
原点復帰動作:書き込み命令コード「9205h:原点
復帰加減速時定数」で設定された時
間で減速停止。
ポイントテーブル動作:ポイントテーブルで設定さ
れた加減速時定数の時間で減速停
止。
JOG 動作:「RWwn7:JOG 動作加減速時定数」
で設定された時間で減速し、一時停止。
0 に設定すると RWwn7 の設定値で動作
再開。
また、このビットが 1 の状態で RYn1:起動を 1 に
した場合は、コマンド指示エラー(エラーコード
0010h)を出力します。
2 局占有時、RYn2:起動選択が 0 の状態で、RYn1:
起動が 1 の時、RYnA~RYnE:ポイントテーブル
No 選択 bit0~bit4 と、このビットで指定された動
作データが実行されます。
このビットが 1 になると、RWwn+4:速度指令デ
ータに設定された速度で、速度制御を行います。
位置制御から、速度制御に切り替える場合は、
RX(n+2)5:ゼロ速度出力が 1 にならないと切り替
えることができません。
位置制御に切り替える場合は、「RX(n+2)5:ゼロ
速度出力」が 1 になっている時にこのビットを 0
にしてください。
13-24
3
4
5
7
8
9
10
11
12
13
通信機能
RY(n+2)3
1
内容
13-4 通信プロファイル
1
デバイス No
1 局占有
2
信号名称
2 局占有
RY(n+2)4
トルク制御切り替え
4
RY(n+2)5
JOG 動作
5
RY(n+2)6
JOG 回転方向
RY(n+3)A
エラーリセット要求フラグ
3
6
RY(n+1)A
7
8
12
通信機能
13
13-25
内容
このビットが 1 になると RWwn+5:トルク指令デ
ータに設定されたトルクでトルク制御を行います。
位置制御から、トルク制御に切り替える場合は、
RX(n+2)5:ゼロ速度出力が 1 にならないと切り替
えることができません。
位置制御に切り替える場合は、「RX(n+2)5:ゼロ
速度出力」が 1 になっている時にこのビットを 0
にしてください。
このビットが 1 になると、RWwn+6:JOG 動作速
度に設定された速度と RWwn+7:JOG 動作加減速
時定数で設定された時間で、RY(n+2)6:JOG 回転
方向で指定された方向に JOG 動作を行います。
RY(n+2)5:JOG 動作で、JOG を行う場合にアクチ
ュエータの回転方向を設定します。このビットが 0
の時正転、1 の時逆転方向へ動作します。
RWrn+2:返答コードにエラーコードが返信された
場合、このビットを 1 に設定するとエラーコード
がクリアされます。
13-4 通信プロファイル
1
データの読み取り、書込み詳細RWw・RWr
(a)書込み RWr(HA-800C⇒マスタ)
アドレス
1 局占有
2 局占有
信号名称
RWrn
モニタ 1 データ
RWrn+1
モニタ 2 データ
RWrn+2
返答コード
RWrn+3
読み出しデータ
RWrn
RWrn+1
RWrn+2
モニタ 1 データ下位 16bit
モニタ 1 データ上位 16bit
返答コード
RWrn+3
読み出しデータ
RWrn+5
モニタ 2 データ下位 16bit
RWrn+6
モニタ 2 データ上位 16bit
2
内容
RYn8:モニタ実行要求を 1 にすると、RWwn:モニタ 1 で
設定されたモニタコードのデータがここに設定されます。
RYn8:モニタ実行要求を 1 にすると、RWwn+1:モニタ 2
で設定されたモニタコードのデータがここに設定されま
す。
HA-800C ドライバに対して、CC-Link 回線から正常な形式
で、命令が発行されない場合、エラーの内容をコードで設
定します。エラー内容とコードは(b)「RWrn+2:返答コ
ード」一覧を参照してください。
RWwn+2:命令コードで、設定値の読出しを指定して、
RYn9:命令コード実行要求を 1 にすると、ここに指定した
データが設定されます。
2 局占有時に、RYn8:モニタ実行要求を 1 にすると、RWwn:
モニタ 1 で設定されたモニタコードのデータの下位 16bit が
ここに設定されます。
2 局占有時に、RYn8:モニタ実行要求を 1 にすると、RWwn:
モニタ 1 で設定されたモニタコードのデータの上位 16bit が
ここに設定されます。モニタコードで指定されたデータが
16bit の場合は 0 が設定されます。
プロファイルに従ってコマンドが送信されない場合、エラ
ーの内容をコードで設定します。エラー内容とコードは(b)
「RWrn+2:返答コード」一覧を参照してください。
RWwn+2:命令コードで、設定値の読出しを指定して、
RYn9:命令コード実行要求を 1 にすると、ここに指定した
データが設定されます。
2 局占有時に、RYn8:モニタ実行要求を 1 にすると、
RWwn+1:モニタ 2 で設定されたモニタコードのデータの
下位 16bit がここに設定されます。
2 局占有時に、RYn8:モニタ実行要求を 1 にすると、
RWwn+1:モニタ 2 で設定されたモニタコードのデータの
上位 16bit がここに設定されます。モニタコードで指定され
たデータが 16bit の場合は 0 が設定されます。
3
4
5
6
7
8
9
10
11
12
通信機能
13
13-26
13-4 通信プロファイル
1
2
3
4
(b)「RWrn+2:返答コード」一覧
コード番号
0000h
内
容
エラーなし
0002h
モニタコード 1 コード
エラー
モニタコード 2 コード
エラー
0004h
パラメータ選択エラー
0001h
5
6
0008h
7
8
12
通信機能
13
書込み範囲エラー
詳 細
制御電源投入時、エラーリセット要求フ
ラグ(RY(n+1)A, RY(n+3)A)によるク
リア時
RWwn:モニタ 1 の設定値が範囲外であ
ることを示します。
RWwn+1:モニタ 2 の設定値が範囲外で
あることを示します。
RWwn+2:命令 コードの設定値が範囲外
であることを示します。
RWwn+2:命令 コードで書き込みを実行
しようとしたが、RWwn+3:書き込みデ
ータが範囲外であることを示します。
RYn1:起動を 1 にした時のエラー:
①移動量モード設定が相対値/絶対値の
場合に、現在値からの移動量が
2147483646pls を超える場合、または、
移動量モード設定が出力軸 1 回転内絶対
値の場合に、移動量が設定範囲外(0 また
は出力軸 1 回転の分解能を超えた値)の
値が設定され、実行することができない
ことを示します。
処置
RWwn の設定値を確認
RWwn+1 の設定値を確認
RWwn+2 の設定値を確認
RWwn+3 の設定値を確認
移動量の設定値を確認
原点復帰速度 1、原点復帰
速度 2 の設定値を確認
②原点復帰速度 1 または原点復帰速度 2
が 125pls/sec 以下であることを示しま
す。
次の場合、このエラーが発生します。
位置制御⇒その他のモー
RX(n+2)5:ゼロ速度出力が 0 の時に、
ド、その他のモード⇒位
RY(n+2)3:速度制御切り替えまたは、
置 制 御 の 場 合 は 、
RY(n+2)4:トルク制御切り替えで制御モ
RX(n+2)5:ゼロ速度出力
0010h
コマンド指示エラー
ードを位置制御以外のモードにしよう
が 1 の時に、制御モード
とした場合及び、位置制御に戻そうとし
を切り替える
たことを示します。
RYnF:減速停止を 0 にし
RYnF:減速停止が 1 の時に、RYn1:起
て RYn1:起動を 1 にする。
動を 1 にした。
原点復帰速度 1 もしくは、アクチュエー
パラメータ書込み範囲
適切な値を設定し、電源
0200h
タ分解能に範囲外の値が設定されてい
エラー
を再投入してください。
ます。
CC-Link より指示されたポイントテーブ
ポイントテーブル未設 ルには動作データが設定されていない 対象ポイントテーブルへ
0800h
定
ため、実行することが出来ないことを示 のデータ書き込み
します。
ポイントテーブルのデータ読み出しを
実行しましたが、対象のポイントテーブ 書き込まれているテーブ
読み出し未設定
4000h
ルにはデータが設定されていないこと ル番号の読み出し
を示します。
・ エラーが発生し返答コードにエラー情報が設定された場合、制御電源 OFF またはエラーリセットまで返答コ
ードのエラー情報は保持されます。
・ エラー情報は返答コードの各ビットに割りついています。複数のエラーが発生した場合は、複数のビットが
1 になります。
13-27
13-4 通信プロファイル
(c)読み取り RWw(マスタ⇒HA-800C)
アドレス
1 局占有
RWwn
RWwn+1
2 局占有
RWwn
RWwn+1
信号名称
モニタ 1
モニタ 2
RWwn+2
RWwn+2
命令コード
RWwn+3
RWwn+3
書込みデータ
RWwn+4
RWwn+5
RWwn+6
トルク指令
JOG 動作速度
JOG 動作加減速時定
数
内容
HA-800C ドライバの状態データを要求します。設定する
コードは、モニタコード(P13-29)を参照してください。
ここで設定されたコードに該当するデータをモニタする
場合は、RYn8:モニタ実行要求を 1 にします。
HA-800C ドライバの状態データを要求します。設定する
コードは、モニタコード(P13-29)を参照してください。
ここで設定されたコードに該当するデータをモニタする
場合は、RYn8:モニタ実行要求を 1 にします。
パラメータや、動作データの読み込み、書込みを行います。
設定するコード番号は、命令コード(P13-30)を参照し
てください。
ここに設定された命令コードを実行する場合は、RYn9:
命令コード実行要求を 1 にしてください。
RWwn+2:命令コードで、書込み命令コードを設定した場
合、書込むデータを設定します。書き込むデータが無い場
合は、設定する必要はありません。
RY(n+2)3:速度指令実行要求を 1 にして、速度制御を行
う場合の速度指令値(モータの回転数 r/min)を設定しま
す。
設定範囲は±0~適用アクチュエータ最高速度×減速比
r/min です。
速度制御から位置制御切り替える場合、この設定値を、調
整モード 1 AJ07:零速度判定値で設定された値以下に設
定しないと変更できません。
+の指令値で正転、-の指令値で逆転します。
RY(n+2)4:トルク指令実行要求を 1 にして、トルク制御
を行う場合のトルク指令(%)を設定します
設定範囲は±0~100(%)で、0 がトルクゼロ、100%が
最大トルクになります。
トルク制御から位置制御切り替える場合、モータの回転速
度が調整モード 1 AJ07:零速度判定値で設定された値以
下に設定しないと変更できません。
+の指令値で正転、-の指令値で逆転します。
RY(n+2)5:JOG 動作実行時(設定値 1)の、JOG 速度(モ
ータの回転数 r/min)を設定します。JOG 動作中にこの設
定を変更することにより、JOG 速度の可変が可能です。
設定値は、10~適用アクチュエータの最高速度×減速比で
単位は r/min です。
またモータ最高速度を超える値を設定した場合、モータは
停止します。
なお、「SP44,45:電子ギヤ設定」、「SP68:電子ギヤ
機能設定」が影響しますので、ご注意ください。
RY(n+2)5:JOG 動作実行時(設定値 1)の、モータの加
速時間及び停止時(設定値 0)の減速時間を設定します。
設定値は、モータが停止から最高速度まで加速する時間、
及び最高速度から停止するまで減速する時間で、設定範囲
は 1~9999 単位は ms です。
なお、「SP44,45:電子ギヤ設定」、「SP68:電子ギヤ
機能設定」が影響しますので、ご注意ください。
13-28
2
3
4
5
6
7
8
9
10
11
12
13
通信機能
RWwn+7
速度指令
1
13-4 通信プロファイル
1
2
モニタコード
「RWwn:モニタ 1」
、「RWwn+1:モニタ 2」にこのコードを設定し、
「RYn8:モニタ実行要求」を 1
にすると、指定したモニタデータが、「RWrn:モニタ 1 データ」
、
「RWrn+1:モニタ 2 データ」にセッ
トされます。
コード No
1 局占有
2 局占有
0000h
0000h
3
4
5
予約
0002h
予約
0003h
予約
0004h
予約
指令パルス累積
(1 局占有:下位 16bit
指令パルス累積
0007h
予約
直前実行済みポイントテーブル No
(電源投入時は
1 局占有:FFh 2 局占有:FFFFh が読み出されます)
0008h
0009h
8
000Ah
000Ah
帰還パルス累積*1
000Ch
予約
000Eh
0010h
0011h
13
pulse
上位 16bit
2 局占有:32bit)
pulse
偏差パルス 上位 16bit
アクチュエータ 1 回転内指令パルス*1(1 回転内の指令を
絶対値で返信)(1 局占有:下位 16bit 2 局占有:32bit)
アクチュエータ 1 回転内指令パルス*1(1 回転内の指令を
絶対値で返信) 上位 16bit
pulse
偏差パルス
(1 局占有:下位 16bit
pulse
pulse
0012h
0012h
出力トルクモニタ
%
0013h
0013h
ピークトルク
%
通信機能
0014h
予約
0015h
0016h
予約
0016h
0017h
13-29
pulse
予約
000Eh
000Fh
0010h
No
2 局占有:32bit)
アブソリュートエンコーダ組合せ時:
"帰還パルス累積" = "ABS 位置(アブソリュートエンコ
ーダ現在位置)" - "仮想原点設定値"
インクリメンタルエンコーダ組合せ時:
"帰還パルス累積" = 制御電源投入時 0、原点復帰動作完
了時 0
000Bh
pulse
pulse
上位 16bit
予約
帰還パルス累積*1
(1 局占有:下位 16bit
000Dh
12
2 局占有:32bit)
0006h
0008h
7
0005h
単位
モニタなし(モニタ値 0 固定)
0001h
0005h
6
内容
モータ速度
(1 局占有:下位 16bit
モータ速度
上位 16bit
2 局占有:32bit)
0018h
0018h
主回路電源電圧
ABS 位置読み出し ※
(1 局占有:下位 16bit 2 局占有:下位 32bit)
0019h
0019h
アブソリュートエンコーダ組合せ時:
"ABS 位置" = "アブソリュートエンコーダ現在位置"
インクリメンタルエンコーダ組合せ時:
不定
r/min
r/min
V
pulse
13-4 通信プロファイル
コード No
1 局占有
2 局占有
001Ah
001Bh
001Bh
001Ch
001Ch
001Dh
001Eh
001Eh
001Fh
内容
単位
ABS 位置読み出し中位 16bit ※
ABS 位置読み出し ※
(1 局占有:上位 16bit 2 局占有:上位 32bit)
アクチュエータ 1 回転内位置*1(1 回転内の位置を絶対
値で返信)位置制御でのみ出力(1 局占有:下位 16bit
2 局占有:32bit)
pulse
アクチュエータ 1 回転内位置*1
pulse
上位 16bit
*2
帰還パルス累積 (1 局占有:下位 16bit
帰還パルス累積
*2
2 局占有:32bit)
1
2
pulse
pulse
3
pulse
pulse
上位 16bit
予約コードを設定すると、
「RWrn+2:返答コード」に、「0001h:モニタコード 1 エラー」または、
「0002h:モニタコード 2 エラー」がセットされます。
※ アブソリュートエンコーダ組み合わせ時のみとなります。また、SHA-CG 出力軸 1 回転仕様での出力範
17
囲は「0~2 ×減速比-1」パルスとなります。
*1:
「0010h:アクチュエータ 1 回転内指令パルス」、「001Bh:アクチュエータ 1 回転内位置」は、「SP67:出
力軸分割機能設定」及び「NP00:アクチュエータ分解能」の設定に応じて値の意味が異なります。詳細
については、付録 6(P 付-31)を参照してください。
*2:「001Eh:帰還パルス累積」は「000Ah:帰還パルス累積」を電子ギヤ比で割った値となります。 なお、
SHA-CG シリーズ以外または SP67=0 の場合には、常に 0 が出力されます。
読出し命令コード詳細
読み出したいデータに対応するコード番号(0010h~0B0Eh)を「RWwn+2:命令コード」に指定し、
「RYn9:命令コード実行要求」を 1 に設定すると、読み出したいデータが「RWrn+3:読み出しデー
タ」に格納されます。項目に対応する命令コード番号を「RWwn+2:命令コード」に設定してくださ
い。コード番号と返信データは全て 4 桁 16 進数です。
本項に記載していないコード番号を設定すると、「RWrn+2:返答コード」にエラーコード「0004h:
パラメータ選択エラー」がセットされます。そのとき、「RWrn+3:読出しデータ」には”0000”が格納
されます。
項目
コード番号
データ内容
現在アラーム/ワーニング
読み出し
0010h
現在発生中のアラーム(コード NO)を読み出します。 同時に複数
のアラームが発生している場合は、最新のアラームコードが読み出さ
れます。
コード NO は、アラームコードを 10 進数として扱います。
例)AL60(偏差過大)の場合は、60(10 進数)を 003C(16 進数)
として出力されます。
アラーム履歴の読み出し
0020h~0027h
過去 8 回分のアラーム履歴を読み出します。
0020h(最新) ~ 0027h(最古)となります。
6
Bit4~
Bit15
常に 0
Bit3
原点信号
Bit2
Bit1
偏差クリ
ア
アラーム
クリア
9
10
11
12
Bit0
非常停止
13-30
通信機能
入力信号の状態を読み出します。読み出されるデータのフォーマット
は次のようになっています。
0040h
8
13
アラーム履歴の発生総稼
0020h~0027h のアラーム発生時の、ドライバの総稼動時間
0030h~0037h
働時間の読み出し
(単位:h)を読み出します。
入力信号状態の読み出し
5
7
命令コード
(1)
4
13-4 通信プロファイル
1
2
3
4
項目
コード番号
データ内容
出力信号の状態を読み出します。読み出されるデータのフォーマット
は次のようになっています。
出力信号状態の読み出し
0050h
Bit3~
Bit15
常に 0
通電時間の読み出し
調整パラメータ読出し
Bit2
原点復帰(認識)
完了
Bit1
アラーム
Bit0
運転準備完了
0081h
弊社出荷時からの、制御回路電源 ON 累積時間を読み出します。単位
は、h です。
0100h~013Bh
調整パラメータの設定値を読出します。コード番号と調整パラメータ
については「※1 調整パラメータ」を参照してください。
5
システムパラメータの設定値を読出します。コード番号とシステムパ
システムパラメータ読出
0200h~0227h ラメータについては「※2 システムパラメータ」を参照してくださ
し
い。
6
動作データの移動量(目標位置)設定値を読み出します。単位はパル
動作データ No0~127 の 0400h~047Fh スです。移動量(目標位置)は、32bit で設定されており、下位 16bit
移動量(目標値)読みだし 0500h~057Fh が、04__h で読み出され、上位 16bit が、05__h で読み出されます。
動作データ No0 が__00h で、No127 が__7Fh になります。
7
8
動作データの最高速度設定値を読み出します。単位は pls/sec です。
動作データ No0~127 の 0600h~067Fh 最高速度は、32bit で設定されており、下位 16bit が、06__h で読み
最高速度読みだし
0700h~077Fh 出され、上位 16bit が、07__h で読み出されます。動作データ No0
が__00h で、No127 が__7Fh になります。
動作データの加減速時定数を読み出します。設定値は、モータが停止
動作データ No0~127 の
から最高速度まで加速する時間、及び最高速度から停止するまで減速
0800h~087Fh
加減速時定数の読みだし
する時間で、設定範囲は 1~9999 単位は ms です。動作データ No0
が 0800h で、No127 が 087Fh になります。
移動量モードの読み出し
12
通信機能
13
移動量(目標値)の設定値を読み出します。
設定値は 0~2 で、
0 が相対値(現在の停止位置からの移動量)、
0A00h~0A7Fh
1 が絶対値(原点からの移動量)、
(No0 ~No127)
2 が出力軸 1 回転内の絶対値、になります
移動量モードの詳細については、
「移動量モード設定」(P13-6)を参
照してください。
0B00h
アクチュエータの分解能下位 16bit の設定値を読み出します。単位は
パルスです。アクチュエータの出力軸に減速機構を追加し、近回りを
設定する場合は、(アクチュエータ分解能×追加減速比)の値を設定
してください。
アクチュエータ一回転移
動量上位 16bit の設定読み
出し
0B01h
アクチュエータの分解能上位 16bit の設定値を読み出します。単位は
パルスです。アクチュエータの出力軸に減速機構を追加し、近回りを
設定する場合は、(アクチュエータ分解能×追加減速比)の値を設定
してください。
原点復帰速度 1 下位 16bit
の読み出し
0B02h
原点復帰速度 1 の設定値下位 16bit を読み出します。単位は pls/sec
です。
原点復帰速度 1 上位 16bit
の読み出し
0B03h
原点復帰速度 1 の設定値上位 16bit を読み出します。単位は pls/sec
です。
原点復帰速度 2 の読み出
し
0B04h
原点復帰速度 2 の設定値を読み出します。単位は pls/sec です。
原点復帰加減速時定数の
読み出し
0B05h
原点復帰時の加減速時定数を読み出します。設定値は、モータが最高
速度まで加速する時間、及び最高速度から、停止(速度 0)まで減速
する時間です。単位は ms です。
原点復帰方向の読み出し
0B06h
原点復帰の方向を読み出します。設定値は 0 か 1 で、0 の時の原点復
帰方向は正転方向、1 の時の原点復帰方向は逆転方向になります。
アクチュエータ一回転移
動量下位 16bit の設定読み
出し
13-31
13-4 通信プロファイル
項目
コード番号
データ内容
原点復帰方法の読み出し
0B07h
原点復帰方法を読み出します。設定値は 0 か 1 で、0 の時は外部セン
サまたは原点 Dog ON により原点復帰を行います。1 の時は RYn2:
起動選択を 1 にして、RYn1:起動を 1 にした時のアクチュエータの
位置を原点とします。
原点センサ選択の読み出
し
0B08h
原点センサ信号の入力先を読み出します。設定値は 0 か 1 で、0 の時
は、CN2-5:原点信号からの入力で原点復帰を行い、1 の時は、CC-Link
の RYn7:原点 Dog ON からの入力により原点復帰を行います。
仮想原点下位 16bit の読み
出し
0B09h
仮想原点の下位 16bit を読み出します。単位はパルスです。
0B0Ch:仮想原点下位 16bit と同じ内容が読み出されます。
バックラッシュ補正値の
読み出し
0B0Ah
バックラッシュ補正の設定値を読みだします。単位はパルスです。
近回り有効無効の設定値
読み出し
0B0Bh
近回り機能の有効、無効設定値を読み出します。設定値は 0 か1で、
0 の時は近回り機能が無効、1 の時は有効になります。
近回り機能を用いる場合は、アクチュエータ分解能の設定を確認してくだ
さい。
近回り機能の詳細については、「移動量モード設定」(P13-6)を参照してく
ださい。
仮想原点下位 16bit の読み
出し
0B0Ch
仮想原点の下位 16bit を読み出します。単位はパルスです。
0B09h:仮想原点下位 16bit と同じ内容が読み出されます。
仮想原点上位 16bit の読み
出し
0B0Dh
仮想原点の上位 16bit を読み出します。単位はパルスです。
動作完了(RXn1)OFF 時間
の読み出し
0B0Eh
動作完了(RXn1)OFF 時間設定値を読み出します。単位は ms です。
1
2
3
4
5
6
7
8
9
10
11
12
通信機能
13
13-32
13-4 通信プロファイル
1
2
3
4
5
6
7
8
※1
番号
0100h
0101h
0102h
0103h
0104h
0105h
0106h
0107h
0108h
0109h
010Ah
010Bh
010Ch
010Dh
010Eh
010Fh
0110h
0111h
0112h
0113h
0114h
0115h
0116h
0117h
0118h
0119h
011Ah
011Bh
011Ch
011Dh
12
通信機能
13
13-33
調整パラメータ読み出し(0100h~013Bh)
コード番号
AJ00
AJ01
AJ02
AJ03
AJ04
AJ05
AJ06
AJ07
AJ08
AJ09
AJ10
AJ11
AJ12
AJ13
AJ14
AJ15
AJ16
AJ17
AJ18
AJ19
AJ20
AJ21
AJ22
AJ23
AJ24
AJ25
AJ26
AJ27
AJ28
AJ29
パラメータ名
位置ループゲイン
速度ループゲイン
速度ループ積分補償
フィードフォワードゲイン
位置決め完了範囲
速度到達判定値
トルク到達判定値
零速度判定値
システム予約
トルク制限値
加減速時定数
システム予約
速度モニタオフセット
電流モニタオフセット
システム予約
システム予約
フィードフォワードフィルタ
負荷慣性モーメント比
トルク定数補正係数
ばね定数補正係数
位置決め時自動ゲイン
システム予約
番号
011Eh
011Fh
0120h
0121h
0122h
0123h
0124h
0125h
0126h
0127h
0128h
0129h
012Ah
012Bh
012Ch
012Dh
012Eh
012Fh
0130h
0131h
0132h
0133h
0134h
0135h
0136h
0137h
0138h
0139h
013Ah
013Bh
コード番号
AJ30
AJ31
AJ32
AJ33
AJ34
AJ35
AJ36
AJ37
AJ38
AJ39
AJ40
AJ41
AJ42
AJ43
AJ44
AJ45
AJ46
AJ47
AJ48
AJ49
AJ50
AJ51
AJ52
AJ53
AJ54
AJ55
AJ56
AJ57
AJ58
AJ59
パラメータ名
システム予約
13-4 通信プロファイル
※2
1
システムパラメータの読み出し(0200h~0227h)
番号
コード
番号
0200h
SP40
パラメータ名
CP3 出力信号設定
番号
コード
番号
0214h
SP60
パラメータ名
位置決め自動ゲイン設定有効/無効
設定
エンコーダモニタ出力パルス数
入力信号論理
出力信号論理
回生抵抗選択
正転/逆転禁止時動作
アブソリュートエンコーダ機能設定
出力軸分割機能設定
電子ギヤ機能設定
フィードフォワード制御機能設定
0201h
SP41
0215h
SP61
システム予約
0202h
SP42
0216h
SP62
0203h
SP43
0217h
SP63
電子ギヤ分子 ※
0204h
SP44
0218h
SP64
0205h
SP45
電子ギヤ分母 ※
0219h
SP65
0206h
SP46
システム予約
021Ah
SP66
システム予約
0207h
SP47
021Bh
SP67
0208h
SP48
021Ch
SP68
サーボ ON 時偏差クリア
0209h
SP49
許容位置偏差
021Dh
SP69
指令極性
020Ah
SP50
021Eh
SP70
020Bh
SP51
速度入力係数
021Fh
SP71
020Ch
SP52
システム予約
0220h
SP72
トルク入力係数
020Dh
SP53
0221h
SP73
020Eh
SP54
状態表示設定
0222h
SP74
システム予約
020Fh
SP55
0223h
SP75
DB 有効/無効設定
0210h
SP56
0224h
SP76
システム予約
0211h
SP57
0225h
SP77
0212h
SP58
0226h
SP78
0213h
SP59
角度補正有効/無効設定
0227h
SP79
※ アブソリュートエンコーダとの組み合わせ(HA-800C-*A,D,E)では、電子ギヤ分子/分母の変更はできませ
ん。
2
3
4
5
6
7
8
9
10
11
12
通信機能
13
13-34
13-4 通信プロファイル
1
2
3
4
書込み命令コード(RWwn+2)詳細
「RWwn+2:命令コード」で指定されたコード番号(8010h~920Eh)で書込み要求したデータを、
HA-800C ドライバに書込みます。
項目に対応する命令コード番号を「RWwn+2:命令コード」、書込むデータを「RWwn+3:書込みデー
タ」に設定してください。その上で、「RYn9:命令コード実行要求」を 1 に設定すると、対応するデ
ータを書き込むことができます。なお、書き込みデータが不要の場合は設定不要です。コード番号と
返信データは全て 4 桁 16 進数です。
本項に記載していないコード番号を設定すると、「RWrn+2:返答コード」にエラーコード「0004h:パ
ラメータ選択エラー」がセットされます。また、設定可能な範囲を超えたデータを設定しようとした
場合は、エラーコード「0008h:書き込み範囲エラー」がセットされます。
5
連続して複数の書き込みを実行する場合、命令コード実行要求を OFF してからリンク
スキャンタイム以上経過後、再度命令コード実行要求を ON してください。詳細は、
書き込み命令コード(P13-44)を確認してください。
6
7
8
12
通信機能
13
項目
データ内容
HA-800C ドライバのアラームで、電源を再投入しなくても
リセット可能(11章 トラブルシューティング参照)なアラ
アラームリセット
8010h
ームをリセットします。このコマンドを実行する前に、命
令コード 8020h:偏差パルスクリアを実行してください。
偏差パルスクリアを実行します。HA-800C ドライバのアラ
偏差パルスクリア*1
8020h
ームが発生した場合は、まず偏差クリアを実行して、命令
コード 8010h:アラームリセットを実行してください。
調整パラメータの設定値を変更します。この命令コードで
は RAM 上に展開されている調整パラメータの値を変更す
るだけなので、設定値を保存する場合は命令コード 8280h:
調整パラメータの変更(RAM)
8100h~813Bh
パラメータの一括書き込みを実行してください。コード番
号と調整パラメータについては「※1 調整パラメータ
(8100h~813Bh の書き込み)」を参照してください。
システムパラメータを書き込みます。この命令コードでは
RAM 上に展開されているシステムパラメータの値を変更す
るだけなので、変更後は命令コード 8280h:パラメータの
シ ス テム パ ラ メ ー タ の 変 更
8200h~8227h
一括書き込みを実行し、HA800C を再起動してください。
(RAM)
システムパラメータは再起動後から有効になります。コー
ド番号とシステムパラメータについては「※2システムパ
ラメータ(8200h~8227h)の書き込み」を参照してください。
命令コード 8100h~813Bh:調整パラメータの変更(RAM)
と、命令コード 8200h~8227h:システムパラメータの変更
パラメータの一括 EEPROM
(RAM)で変更された、調整パラメータとシステムパラメータ
8280h
書込み
を、EEPROM に一括保存します。この命令コードを実行し
ないで、HA-800C ドライバの制御回路電源を OFF すると、
変更値は消去されます。
8300h,8301h は、動作データ No0 の、移動量(目標値)を
設定します。単位はパルスで、下位 16bit が、8300h で書き
動作データ No0 の移動量
込まれ、上位 16bit が、8301h で書き込まれます。設定範囲
8300h、8301h
(目標値)書込み
は符号付 32bit 幅になります。
書き込み時は必ず、下位、上位の順に書き込んでください。
上位が 0 の場合も必ず、0 を書き込んでください。
*1:「偏差パルスクリアを使用する場合には、必ず「CN2-4 偏差クリア:ERR-CLR」(P5-5)の注意を参照してく
ださい。
13-35
コード番号
13-4 通信プロファイル
項目
動作データ No0 の回転
速度書込み
コード番号
8302h、8303h
データ内容
8302h,8303h は、動作データ No0 の、アクチュエータ回転速度を
設定します。単位は pls/sec で、下位 16bit が、8302h で書き込ま
れ、上位 16bit が、8303h で書き込まれます。書き込み時は必ず、
下位、上位の順に書き込んでください。上位が 0 の場合も必ず、0
を書き込んでください。設定範囲は 007Dh~適用アクチュエータ
の最高回転速度までです。アクチュエータの回転速度は次の計算
式により pls/sec に換算できます。アブソリュートエンコーダの場
合は、電子ギヤは 1/1 固定です。
回転速度(r/min)
60
動作データ No0 の加減
速時定数書込み
8304h
動作データ No0 の移動
量のモード設定書込み
8305h
動作データ No1~127 の
移動量(目標値)設定
(RAM)
8B01h~8B7Fh
8C01h~8C7Fh
×モータ軸分解能×
電子ギヤ分母
電子ギヤ分子
8304h は、動作データ No0 の、加減速時定数を設定します。単位
は ms で、モータの最大速度まで加速する時間、及び最大速度から、
停止(速度 0)まで減速する時間で、設定範囲は 1~9999(1~270Fh)
です。
命令コード 8300h、8301h:動作データ No0 の移動量(目標値)書
込みで書き込まれた移動量の移動量モードの設定を行います。が、
0 は相対値(現在の停止位置からの移動量)、
1 は絶対値(原点からの移動量)、
2 は出力軸 1 回転内の絶対値、になります
移動量モードの詳細については、「移動量モード設定」(P13-6)
を参照してください。
8B01h~8B7Fh、8C01h~8C7Fh は、動作データ No1~127 の、
移動量(目標値)を設定します。単位はパルスで、下位 16bit が、
8B01h~8B7Fh で設定し、上位 16bit が 8C01h~8C7Fh で設定さ
れます。設定範囲は符号付 32bit 幅になります。書き込み時は必ず、
下位、上位の順に書き込んでください。上位が 0 の場合も必ず、0
を書き込んでください。この命令コードでは RAM 上に展開されて
いる動作データを変更しますので、HA-800C の電源をオフすると
変更された値は無効になります。設定値を記憶する場合は、
9100h:動作データ No1~127 の EEPROM への一括保存を実行し
てください。
設定例:動作データ No1 に 0007FFFFh を設定する場合
8B01h に、FFFFh、8C01h に、0007h を設定します。
1
2
3
4
5
6
7
8
9
10
11
12
通信機能
13
13-36
13-4 通信プロファイル
1
項目
コード番号
2
3
4
動作データ No1~127 の
回転速度設定 (RAM)
8D01h~8D7Fh
8E01h~8E7Fh
6
動作データ No1~127 の
加減速時定 数設定
(RAM)
8F01h~8F7Fh
移動量のモード設定
(RAM)
9001h~907Fh
動作データ No1~127 の
EEPROM への一括保存
9100h
8
12
通信機能
13
8D01h~8D7Fh、8E01h~8E7Fh は、動作データ No1~127 のア
クチュエータ回転速度を設定します。単位は pls/sec で、下位 16bit
が、8D01h~8D7Fh で書き込まれ、上位 16bit が、8E01h~8E7Fh
で書き込まれます。書き込み時は必ず、下位、上位の順に書き込
んでください。上位が 0 の場合も必ず、0 を書き込んでください。
設定範囲は 007Dh~適用アクチュエータの最高回転速度までで
す。アクチュエータの回転速度は次の計算式により pls/sec に換算
できます。
回転速度(r/min)
60
×アクチュエータ分解能×
電子ギヤ分母
電子ギヤ分子
この命令コードでは RAM 上に展開されている動作データを変更
しますので、HA-800C の電源をオフすると変更された値は無効に
なります。設定値を記憶する場合は、9100h:動作データ No1~127
の EEPROM への一括保存を実行してください。
5
7
データ内容
13-37
設定例:動作データ No1 に 00002FF0h を設定する場合
8D01h に、2FF0h、8E01h に、0000h を設定します
8F01h~8F7Fh は、動作データ No1~127 の、加減速時定数を設
定します。単位は ms で、モータが最高速度まで加速する時間、及
び最高速度から、停止(速度 0)まで減速する時間です。設定範囲
は 1~9999(1~270Fh)です。この命令コードでは RAM 上に展開さ
れている動作データを変更しますので、HA-800C の電源をオフす
ると変更された値は無効になります。設定値を記憶する場合は、
9100h:動作データ No1~127 の EEPROM への一括保存を実行し
てください。
命令コード 8B01h~8B7Fh、8C01h~8C7Fh:動作データ No1~
127 の移動量(目標値)設定で設定された移動量の移動量モード
の設定を行います。
0 で相対値(現在の停止位置からの移動量)、
1 で絶対値(原点からの移動量)、
2 で出力軸 1 回転内の絶対値、になります
この命令コードでは RAM 上に展開されている動作データのみを
変更しますので、HA-800C の電源をオフすると変更された値は無
効になります。設定値を記憶する場合は、9100h:動作データ No1
~127 の EEPROM への一括保存を実行してください。
移動量モードの詳細については、「移動量モード設定」(P13-6)
を参照してください。
コード番号 8B01h~8B7Fh, 8C01h~8C7Fh:動作データ No.1~
127 の移動量(目標値)設定、8D01h~8D7Fh,8E01h~8E7Fh:
動作データ No1~127 の回転速度設定、8F01h~8F7Fh:動作デー
タ No1~127 の加減速時定数設定、9001h~907Fh:目標位置のモ
ード設定の変更の内容を一括して、EEPROM に保存します。
動作データ No0 は RAM 上でのみ管理されるので EEPROM は保存
されません。
13-4 通信プロファイル
項目
コード番号
アクチュエータ一回転移
動 量 下 位 16bit の 設 定
(RAM/EEPROM) *2
9200h
アクチュエータ一回転移
動 量 上 位 16bit の 設 定
(RAM/EEPROM) *2
9201h
原点復帰速度 1 下位 16bit
の設定(RAM/EEPROM)
原点復帰速度 1 上位 16bit
の設定(RAM/EEPROM)
原点復帰速度 2 の設定
(RAM/EEPROM)
9202h
データ内容
アクチュエータの分解能の下位 16bit を設定します。この値は工場
出荷時に適用アクチュエータに合わせて設定がされていますが、
アクチュエータの出力軸に減速装置が取り付けられて、分解能が
変わる場合や電子ギヤを 1 以外の値にセットして分解能が変わる
場合で、920Bh:近回り機能を有効にしている場合は、変更します。
書き込み時は必ず、下位、上位の順に書き込んでください。上位
が 0 の場合も必ず、0 を書き込んでください。
設定例:分解能が、2,000,000(001E8480h)の場合
9200h に、8480h、9201h に、001Eh を設定します。
原点復帰速度 1 を設定します。単位は pls/sec で、下位 16bit が、
9202h で書き込まれ、上位 16bit が、9203h で書き込まれます。
書き込み時は必ず、下位、上位の順に書き込んでください。上位
が 0 の場合も必ず、0 を書き込んでください。設定範囲は 007Dh
~適用アクチュエータの最高回転速度までです。アクチュエータ
の回転速度は次の計算式により pls/sec に換算できます。
回転速度(r/min)
9203h
×アクチュエータ分解能×
60
電子ギヤ分母
電子ギヤ分子
デフォルトは、9202h が 0D40h、9203h が 0003h です。
9204h
原点復帰速度 2 を設定します。単位は pls/sec で、設定範囲は 007Dh
~7FFFh です。アクチュエータの回転速度は次の計算式により
pls/sec に換算できます。
回転速度(r/min)
60
×アクチュエータ分解能×
電子ギヤ分母
電子ギヤ分子
13-38
2
3
4
5
6
7
8
9
10
11
12
13
通信機能
デフォルトは、4E20h です。
原点復帰時の加減速時定数を設定します。単位は ms で、モータの
最高速度まで加速する時間、及びモータの最高速度から、停止(速
原点復帰加減速時定数
9205h
(RAM/EEPROM)
度 0)まで減速する時間で、設定範囲は 1~9999(1~270Fh)です。
デフォルトは、3E8h です。
原点復帰の方向を設定します。設定値は 0 か 1 で、0 は正転方向
原点復帰方向の設定の書
9206h
に:原点復帰を行います。1 は逆転方向へ原点復帰を行います。
き込み(RAM/EEPROM)
デフォルトは、0 です。
原点復帰方法を設定します。設定値は 0 か 1 で、0 を設定した場
合は、外部センサの信号により原点復帰を行います。1 を設定した
原点復帰方法の選択
場合は、RYn2:起動選択が 1 の状態で、RYn1:起動を 1 にした
9207h
(RAM/EEPROM)
ときのアクチュエータの停止位置を原点として認識します。
デフォルトは、0 です。
原点センサ信号の入力先の選択を行います。設定値は 0 か 1 で、0
の場合は、原点センサの信号は、CN2-5:原点信号に入力します。
原点センサ選択
9208h
(RAM/EEPROM)
1 の場合は、RYn7:原点信号に入力します。
デフォルトは、0 です。
仮想原点の下位 16bit を設定します。単位はパルスで、設定範囲は
8000h~7FFFh(-32768~32767)になります。
仮想原点下位 16bit の設定
9209h
デフォルトは、0 です。
(RAM/EEPROM) *1*2
書き込み時は必ず、下位、上位の順に書き込んでください。上位
が 0 の場合も必ず、0 を書き込んでください。
*1: アブソリュートエンコーダとの組み合わせで仮想原点を設定した場合は、設定した位置を原点(Position 0)
として位置決めを行います。
*2: アクチュエータ一回転移動量、仮想原点は設定変更後に制御電源を再投入することで、設定変更が有効にな
ります。
1
13-4 通信プロファイル
1
2
3
4
5
6
7
8
12
項目
コード番号
データ内容
バックラッシュ補正値の設定を行います。単位はパルスで、設定
範囲は 0~7FFFh(0~32767)です。
デフォルトは、0 です。
近回り機能の有効、無効を設定します。設定範囲は 0 か 1 で、0
を設定した場合は、近回り機能は無効、1 を設定した場合は有効と
なります。
近回り機能は、9200h:アクチュエータ一回転移動量下位 16bit と、
9201h:アクチュエータ一回転移動量上位 16bit の設定が正しく行
われていない場合は正常に機能しません。工場出荷時の設定から
近回り有効無効の設定の
分解能が変わるような使い方をしている場合は、設定値を確認し
920Bh
設定(RAM/EEPROM)
てください。
デフォルトは、0 です。
近回り機能を用いる場合は、アクチュエータ分解能の設定を確認してく
ださい。
近回り機能の詳細については、「移動量モード設定」(P13-6)を参照し
てください。
仮想原点の下位 16bit を設定します。単位はパルスで、設定範囲は
8000h~7FFFh(-32768~32767)になります。
仮想原点下位 16bit の設定
920Ch
デフォルトは、0 です。
(RAM/EEPROM) *1*2
書き込み時は必ず、下位、上位の順に書き込んでください。上位
が 0 の場合も必ず、0 を書き込んでください。
仮想原点の上位 16bit を設定します。単位はパルスで、設定範囲は
3~FFFD(+3~-4)になります。
仮想原点上位 16bit の設定
920Dh
デフォルトは、0 です。
(RAM/EEPROM) *1*2
書き込み時は必ず、下位、上位の順に書き込んでください。上位
が 0 の場合も必ず、0 を書き込んでください。
起動(RYn1)を ON した後、動作完了(RXn1)が OFF する時間を設定
します。設定範囲は 0~7FFFh で、単位は ms です。
例えば、絶対値で指定された移動量と、現在値が同じ状態で起動
(RYn1)を ON した場合、アクチュエータは動作しませんが、動作
動作完了(RXn1)OFF 時間
完了(RXn1)は設定された時間だけ OFF します。また、動作量が少
920Eh
(RAM/EEPROM)
なく、設定された時間よりも短い時間で動作が完了しても、設定
された時間だけ、動作完了(RXn1)は OFF します。
タイミングチャート「起動」(P13-48)も参照してください。
デフォルトは 0 です。
*1: アブソリュートエンコーダとの組み合わせで仮想原点を設定した場合は、設定した位置を原点(Position 0)
として位置決めを行います。
*2: アクチュエータ一回転移動量、仮想原点は設定変更後に制御電源を再投入することで、設定変更が有効にな
ります。
バックラッシュ補正値の
設定(RAM/EEPROM)
通信機能
13
13-39
920Ah
13-4 通信プロファイル
※1
番号
8100h
8101h
8102h
8103h
8104h
8105h
8106h
8107h
8108h
8109h
810Ah
810Bh
810Ch
810Dh
810Eh
810Fh
8110h
8111h
8112h
8113h
8114h
8115h
8116h
8117h
8118h
8119h
811Ah
811Bh
811Ch
811Dh
1
調整パラメータ(8100h~813Bh の書き込み)
コード番号
AJ00
AJ01
AJ02
AJ03
AJ04
AJ05
AJ06
AJ07
AJ08
AJ09
AJ10
AJ11
AJ12
AJ13
AJ14
AJ15
AJ16
AJ17
AJ18
AJ19
AJ20
AJ21
AJ22
AJ23
AJ24
AJ25
AJ26
AJ27
AJ28
AJ29
パラメータ名
位置ループゲイン
速度ループゲイン
速度ループ積分補償
フィードフォワードゲイン
位置決め完了範囲
速度到達判定値
トルク到達判定値
零速度判定値
システム予約
トルク制限値
加減速時定数
システム予約
速度モニタオフセット
電流モニタオフセット
システム予約
システム予約
フィードフォワードフィルタ
負荷慣性モーメント比
トルク定数補正係数
ばね定数補正係数
位置決め時自動ゲイン
システム予約
番号
811Eh
811Fh
8120h
8121h
8122h
8123h
8124h
8125h
8126h
8127h
8128h
8129h
812Ah
812Bh
812Ch
812Dh
812Eh
812Fh
8130h
8131h
8132h
8133h
8134h
8135h
8136h
8137h
8138h
8139h
813Ah
813Bh
コード番号
AJ30
AJ31
AJ32
AJ33
AJ34
AJ35
AJ36
AJ37
AJ38
AJ39
AJ40
AJ41
AJ42
AJ43
AJ44
AJ45
AJ46
AJ47
AJ48
AJ49
AJ50
AJ51
AJ52
AJ53
AJ54
AJ55
AJ56
AJ57
AJ58
AJ59
パラメータ名
2
3
4
5
システム予約
6
7
8
9
10
11
12
通信機能
13
13-40
13-4 通信プロファイル
1
2
3
4
5
6
7
8
※2
システムパラメータ(8200h~8227h)の書き込み
番号
コード
番号
8200h
SP40
8201h
8202h
8203h
8204h
8205h
8206h
8207h
8208h
8209h
820Ah
820Bh
820Ch
820Dh
820Eh
820Fh
8210h
8211h
8212h
8213h
SP41
SP42
SP43
SP44
SP45
SP46
SP47
SP48
SP49
SP50
SP51
SP52
SP53
SP54
SP55
SP56
SP57
SP58
SP59
パラメータ名
CP3 出力信号設定
システム予約
電子ギヤ分子 ※
電子ギヤ分母 ※
システム予約
システム予約
サーボ ON 時偏差クリア
許容位置偏差
指令極性
速度入力係数
システム予約
トルク入力係数
状態表示設定
DB 有効/無効設定
システム予約
角度補正有効/無効設定
番号
コード
番号
8214h
SP60
8215h
8216h
8217h
8218h
8219h
821Ah
821Bh
821Ch
821Dh
821Eh
821Fh
8220h
8221h
8222h
8223h
8224h
8225h
8226h
8227h
SP61
SP62
SP63
SP64
SP65
SP66
SP67
SP68
SP69
SP70
SP71
SP72
SP73
SP74
SP75
SP76
SP77
SP78
SP79
パラメータ名
位置決め自動ゲイン設定有効/無効設
定
エンコーダモニタ出力パルス数
入力信号論理
出力信号論理
回生抵抗選択
正転/逆転禁止時動作
アブソリュートエンコーダ機能設定
出力軸分割機能設定
電子ギヤ機能設定
フィードフォワード制御機能設定
システム予約
システム予約のパラメータ書き換えないでください。
システムパラメータは、HA-800C の電源再投入後から有効となります。電源再投入を行う前に必ず
8280h:パラメータの一括 EEPROM 書込みを実行してください。
*:アブソリュートエンコーダとの組み合わせ(HA-800C-*A,D,E)では、電子ギヤ分子/分母の変更
はできません。
12
通信機能
13
13-41
13-4 通信プロファイル
1
タイミングチャート
マスターとの通信タイミングチャート示します。
2
モニタコード(1 局占有)
モニタ 1(RWwn)
3
モニタ 2(RWwn+1)
4
モニタ実行要求(RYn8)
5
モニタ中(RXn8)
モニタ 1 データ(RWrn)
6
モニタ 2 データ(RWrn+1)
7
返答コード(RWrn+2)
8
データ不定
モニタ実行要求(RYn8)が ON している間は、モニタ 1 データ(RWrn)、モニタ 2 データ(RWrn+1)
は、CC-Link の通信周期毎に更新されます。
モニタ実行要求(RYn8)が ON している間に、モニタ 1(RWwn)またはモニタ 2(RWwn+1)を変更す
ると、変更されたモニタデータが出力されます。
モニタ実行要求(RYn8)を OFF すると、モニタ 1 データ(RWrn)
、モ
ニ タ 2 データ(RWrn+1)は、不
定になります。
9
10
11
12
通信機能
13
13-42
13-4 通信プロファイル
1
モニタコード(2 局占有)
モニタ 1(RWwn)
2
3
4
モニタ 2(RWwn+1)
モニタ実行要求(RYn8)
モニタ中(RXn8)
モニタ 1 データ下位 16bit(RWrn)
5
6
7
モニタ 1 データ上位 16bit(RWrn+1)
モニタ 2 データ下位 16bit(RWrn+5)
モニタ 2 データ上位 16bit(RWrn+6)
返答コード(RWrn+2)
8
データ不定
2 局占有では、32bit のモニタデータを指定した場合は、モニタデータ下位(RWrn 又は RWrn+5)
と、モニタデータ上位(RWrn1 または RWrn+6)に出力されます。16bit データの場合は、上位は 0
が設定されます。
12
通信機能
13
13-43
13-4 通信プロファイル
1
読み出し命令コード
命令コード(RWwn+2)
2
命令コード実行要求(RYn9)
3
命令コード実行完了(RXn9)
読み出しデータ(RWrn+3)
4
返答コード(RWrn+2)
データ不定
データ不定
命令コード実行完了(RXn9)が ON するタイミングで、命令コード(RWwn+2)に指定されたコード
に対応するデータが、読み出しデータ(RWrn+3)に出力されます。
命令コード実行要求(RYn9)が OFF すると、命令コード実行完了(RXn9)が OFF し、読み出しデ
ータ(RWrn+3)の値は不定となります。
5
6
7
8
書き込み命令コード
命令コード(RWwn+2)
9
書き込みデータ(RWwn+3)
10
命令コード実行要求(RYn9)
11
命令コード実行完了(RXn9)
返答コード(RWrn+2)
12
書き込み処理(Max12s)
13-44
13
通信機能
命令コード実行要求(RYn9)が ON されると、命令コード(RWwn+2)で指定された内容が、書き込
みデータ(RWwn+3)で指定されたデータに書換え処理を開始します。
連続して複数の書き込みを実行する場合、命令コード実行要求を OFF してから 1 通信周期以上経
過後、再度命令コード実行要求を ON してください。
書換え処理が終了すると、命令コード実行完了(RXn9)が ON します。書換え処理時間は書き換える
内容により異なりますが、最大で 12 秒(動作データ No1~127 の EEPROM への一括保存)です。
13-4 通信プロファイル
1
オーバーライド(速度)
準備完了(RXn0)
2
起動(RYn1)
3
モータ速度
命令コード(RWwn+2)
4
速度下位 16bit
速度上位 16bit
書き込みデータ(RWwn+3)
5
命令コード実行要求(RYn9)
6
7
8
命令コード実行完了(RXn9)
返答コード(RWrn+2)
アクチュエータが動作中、速度データを変更し起動(RYn1)を ON すると、アクチュエータの速度が
変更されます。
速度の変更は、必ず下位 16bit、上位 16bit の順番に書き込んで下さい。
(上位 16bit データが変更前
と同じであっても、書き込みが必要です)下位 16bit だけを変更し、起動(RYn1)を ON した場合は、
返答コード(RWrn+2)に、0800h(ポイントテーブル未設定)が返信されます。
HA-800C は、位置のオーバーライドも可能です。
予めオーバーライドする動作データを、別のデータ No に設定し、アクチュエータが動作中にポイ
ント No 選択(RYnA~RYnE、RY(n+2)0、RY(n+2)1)よりオーバーライドデータが設定されてい
るポイントテーブル No を指定して、起動(RYn1)を ON しても、オーバーライドが可能です。
12
通信機能
13
13-45
13-4 通信プロファイル
1
制御モード切替(位置→速度→位置)
準備完了(RXn0)
2
正転ストロークエンド(RYn4)
3
逆転ストロークエンド(RYn5)
起動(RYn1)
位置制御
アクチュエータ
4
速度制御
5
ゼロ速度出力(RX(n+2)5)
6
速度制御切り替え(RY(n+2)3)
速度制御実行中(RX(n+2)3)
位置制御
位置制御
7
速度制御
速度指令(RWwn+4)
速度指令零
ゼロ速度検出(RX(n+2)5)が ON している時に、速度制御切り替え(RY(n+2)3)を ON すると、HA-800C
は速度制御で動作します。
速度制御に切り替わると、速度制御実行中(RX(n+2)3)が ON します。
速度制御時は、(RWwn+4)に設定された速度で動作します。設定単位は r/min で設定範囲は±0~適
用アクチュエータ最高速度×減速比です。
速度制御から位置制御への切り替えも、ゼロ速度検出(RX(n+2)5)が ON している事が条件となりま
す。ゼロ速度検出(RX(n+2)5)が OFF している時に、速度制御切り替え(RY(n+2)3)を OFF しても、
制御モードを切り替えることはできません。
(RWrn+2:返答コードに 0010h:コマンド指令エラー
が返信されます。)
HA-800C は、位置制御、速度制御、トルク制御を切り替えて使用する事が可能です。詳細は以下を
ご覧ください。
制御モード切り替え条件
制御モード切り替え
位置制御⇒速度制御
速度制御⇒位置制御
位置制御⇒トルク制御
トルク制御⇒位置制御
速度制御⇒トルク制御
トルク制御⇒速度制御
条件
ゼロ速度検出(RX(n+2)5)が、ON している時に切り替え可能
ゼロ速度検出(RX(n+2)5)が、ON している時に切り替え可能
ゼロ速度検出(RX(n+2)5)が、ON している時に切り替え可能
ゼロ速度検出(RX(n+2)5)が、ON している時に切り替え可能
条件なし(アクチュエータ動作中切り替え可能)
条件なし(アクチュエータ動作中切り替え可能)
13-46
9
10
11
12
13
通信機能
速度制御切り替え(RY(n+2)3)と、トルク制御切り替え(RY(n+2)4)設定値と制御モード
速度制御切り替え
トルク制御切り替え
制御モード
備 考
(RY(n+2)3)
(RY(n+2)4)
位置制御
OFF
OFF
速度指令は、速度指令(RWwn+4)設定値
ON
OFF
速度制御
JOG 動作(RY(n+2)5)はできません
トルク指令は、トルク指令(RWwn+5)設定値
トルク制御
OFF
ON
JOG 動作(RY(n+2)5)はできません
切り替えなし
ON
ON
8
13-4 通信プロファイル
1
JOG 運転
準備完了(RXn0)
2
正転ストロークエンド(RYn4)
3
逆転ストロークエンド(RYn5)
4
速度制御切り替え(RY(n+2)3)
トルク制御切り替え(RY(n+2)4)
5
JOG 動作(RY(n+2)5)
6
JOG 回転方向(RY(n+2)6)
7
JOG 動作速度(RWwn+6)
速度ゼロ
JOG 動作加減速時定数(RWwn+7)
8
アクチュエータ
回転方向+
回転方向-
12
JOG 動作(RY(n+2)5)を ON すると、JOG 回転方向(RY(n+2)6)で設定された方向(OFF:CW 方向、
ON:CCW 方向)に JOG 動作速度(RWwn+6)、JOG 動作加減速時定数(RWwn+7)の設定値にした
がって JOG 動作を開始します。
JOG 動作中に、JOG 動作速度(RWwn+6)、JOG 動作加減速時定数(RWwn+7)を変更すると、変更
された値に JOG 動作が変更されます。
JOG 動作中に、JOG 回転方向(RY(n+2)6)を変更すると、回転方向が変更されます。この時の減速、
加速は JOG 動作加減速時定数(RWwn+7)の設定値が反映されます。
JOG 動作(RY(n+2)5)を OFF すると、減速停止します。
JOG 動作速度(RWwn+6)を 0 にすると、減速停止します。
通信機能
13
13-47
13-4 通信プロファイル
1
起動
準備完了(RXn0)
2
正転ストロークエンド(RYn4)
3
逆転ストロークエンド(RYn5)
ポイントテーブル No.選択
(RYnA~E,RY(n+2)0,1)
4
0より大きく
1ScanTime以上
移動量 0 で
起動の場合
5
起動(RYn1)
6
動作完了(RXn1)
7
アクチュエータ
命令コード 920Eh 設定値
ポイントテーブル No を指定して、起動(RYn1)を、ON するとアクチュエータは動作を開始
します。
動作を開始すると、動作完了(RXn1)は OFF して、動作完了後、ON します。
現在値と同じ位置を指定して、起動(RYn1)を ON した場合、モータは動かないまま動作完了
(RXn1)は一度 OFF した後、ON します。この時の時間は、NP06:RXn1 最小 OFF 時間、も
しくは、CC-Link 通信の命令コード 920Eh により、0~32767ms(0~7FFFh)の間で設定可能で
す。
制御電源投入後、動作完了(RXn1)は OFF しています。起動(RYn1)を ON し、動作完了後、
動作完了(RXn1)は ON します。なお、動作完了(RXn1)は、電源投入後に位置決め動作も
しくは原点復帰動作前、または速度制御/トルク制御から位置制御へ切り替えた場合には、0
となります。
動作途中に(動作完了(RXn1)OFF の間に)
、モータ励磁 OFF(サーボ ON 指令(RYn0)OFF、
アラーム・ワーニング等による)が起きた場合、動作完了(RXn1)は OFF のまま、動作がキ
ャンセルされます。再度モータ励磁しても、キャンセルされた動作は再開しません。また動作
完了(RXn1)は OFF しています。
動作途中に(動作完了(RXn1)OFF の間に)減速停止(RYnF)を ON した場合、動作完了(RXn1)
は OFF のまま、動作がキャンセルされます。減速停止(RYnF)を OFF してもキャンセルされ
た動作は再開しません、また動作完了(RXn1)は OFF しています。
動作完了後、動作完了(RXn1)ON のときに、外乱・オーバーシュート等の要因や、JOG 動
作(CC-Link 通信、PSF-800 通信など)により、位置偏差が位置決め完了範囲を超えた(現在
の停止位置が位置決め動作で指定した位置に対して位置決め完了範囲外に動いた)場合、動作
完了(RXn1)は OFF します。
要因が除去され、(または JOG 等により)最後に実行されたポイントデータの位置決め完了範
囲内に戻ると動作完了(RXn1)は ON します。
13-48
8
9
10
11
12
13
通信機能
命令コード 920Eh 設定値
13-4 通信プロファイル
1
2
3
4
5
6
7
8
12
通信機能
13
13-49
14
付録
ここでは、出荷時設定などについて説明します。
付録-1
付録-2
付録-3
付録-4
付録-5
付録-6
付録-7
出荷時設定 ·································································· 付-1
回生抵抗について ························································· 付-7
ドライバ保持データ一覧··············································· 付-18
ドライバ交換手順 ······················································· 付-22
アクチュエータ・モータ交換手順 ··································· 付-27
SHA-CG(-S)使用時の注意事項 ······································· 付-31
制御ブロック図 ·························································· 付-37
付録-1 出荷時設定
1
2
3
付録-1 出荷時設定
工場出荷時で適用アクチュエータごとの標準設定パラメータ値を次に示します。
SHA シリーズ(電圧:200V)
4
5
6
7
8
SHA20-SG
アクチュエータ型番
アクチュエータ減速比
51
81
161
11
51
81
101
121
161
HA-800C-3D/E-200
5311
5321
5331
5341
5351
5801
5011
5021
5031
5041
5051
40
40
40
40
40
40
40
40
40
40
40
20
20
20
20
20
25
25
25
25
25
25
20
20
20
20
20
20
20
20
20
20
20
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
150
150
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
6000
6000
6000
6000
6000
5600
5600
5600
5600
5600
5600
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
0
0
0
0
0
11
51
121
161
d13
AJ00
AJ01
AJ02
SP69
SHA32-SG/HP
アクチュエータ型番
アクチュエータ減速比
81
101
HA-800C-6D/E-200
ドライバ組合せ
5811
5111
5121
5131
5141
5151
40
40
40
40
40
40
56
56
56
56
56
56
70
70
70
70
70
70
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
4800
4800
4800
4800
4800
4800
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
51
81
121
161
51
d13
AJ01
AJ02
SP69
10
11
SHA40-SG
アクチュエータ型番
アクチュエータ減速比
101
SHA40-SG
HA-800C-6D/E-200
ドライバ組合せ
81
101
121
161
5211
5221
5231
5241
5251
5211
5221
5231
5241
5251
40
40
40
40
40
40
40
40
40
40
80
80
80
80
80
8
8
8
8
8
60
60
60
60
60
60
60
60
60
60
AJ04
150
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
4000
4000
4000
4000
4000
4000
4000
4000
4000
4000
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
0
0
0
0
d13
AJ00
AJ02
付録
SP69
付-1
付
HA-800C-24D/E-200
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
AJ01
付
SHA25-SG/HP
121
HA-800C-3D/E-200
ドライバ組合せ
AJ00
付
101
付
付録-1 出荷時設定
1
SHA58-SG
アクチュエータ型番
アクチュエータ減速比
81
3
4
5
101
121
161
HA-800C-24D/E-200
5431
5441
5451
5521
5531
5541
5551
40
40
40
40
40
40
40
40
26
26
26
26
30
30
30
30
60
60
60
60
60
60
60
60
AJ04
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
3000
3000
3000
3000
2800
2800
2800
2800
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
0
0
50
80
120
160
50
80
AJ00
AJ01
AJ02
SP69
SHA20-CG
アクチュエータ型番
アクチュエータ減速比
2
3
4
5
SHA32-CG(-S)
SHA25-CG(-S)
100
HA-800C-3D/E-200
ドライバ組合せ
100
120
160
50
80
HA-800C-3D/E-200
100
120
6
160
HA-800C-6D/E-200
8311
8321
8331
8341
8351
8011
8012
8021
8022
8031
8032
8041
8042
8051
8052
8111
8112
8121
8122
8131
8132
8141
8142
8151
8152
40
40
40
40
40
40
40
40
40
40
40
40
40
40
40
20
20
20
20
20
25
25
25
25
25
56
56
56
56
56
20
20
20
20
20
20
20
20
20
20
70
70
70
70
70
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
150
150
150
150
150
150
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
6000
6000
6000
6000
6000
5600
5600
5600
5600
5600
4800
4800
4800
4800
4800
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
120
160
d13
8
81
5421
6
7
161
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
d13
1
SHA65-SG
121
HA-800C-24D/E-200
ドライバ組合せ
2
101
AJ00
AJ01
AJ02
SP69
SHA40-CG(-S)
アクチュエータ型番
アクチュエータ減速比
50
80
100
SHA40-CG(-S)
120
160
50
HA-800C-6D/E-200
ドライバ組合せ
80
100
8211
8212
8221
8222
8231
8232
8241
8242
8251
8252
8211
8212
8221
8222
8231
8232
8241
8242
8251
8252
40
40
40
40
40
40
40
40
40
40
80
80
80
80
80
8
8
8
8
8
60
60
60
60
60
60
60
60
60
60
AJ04
150
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
4000
4000
4000
4000
4000
4000
4000
4000
4000
4000
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
3
3
3
3
3
3
3
3
3
3
AJ00
AJ01
AJ02
SP69
8
9
10
11
HA-800C-24D/E-200
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
d13
7
付
付
付録
付
付-2
付録-1 出荷時設定
1
2
3
SHA シリーズ(電圧:100V)
5
6
51
161
50
80
100
120
160
8621
8622
8631
8632
8641
8642
8651
8652
HA-800C-6D/E-100
5611
5621
5631
5641
5651
40
40
40
40
40
40
40
40
40
40
25
25
25
25
25
25
25
25
25
25
20
20
20
20
20
20
20
20
20
20
AJ04
150
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
4800
4800
4800
4800
4800
4800
4800
4800
4800
4800
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
3
3
3
3
3
d13
AJ00
AJ01
SP69
FHA-Cmini
4 本省線インクリメンタルシリーズ(電圧:200V)
FHA-8C
アクチュエータ型番
アクチュエータ減速比
30
50
FHA-11C
100
30
HA-800C-1C-200
50
FHA-14C
100
30
HA-800C-1C-200
50
100
HA-800C-1C-200
6204
6214
6234
6404
6414
6434
6604
6614
6634
40
40
40
40
40
40
40
40
40
35
35
35
45
45
45
80
80
80
20
20
20
20
20
20
20
20
20
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
SP51
d13
AJ00
AJ01
AJ02
速度入力係数(初期値)
6000
6000
6000
6000
6000
6000
6000
6000
6000
SP60
自動ゲイン(初期値)
1
1
1
1
1
1
1
1
1
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
SP69
FHA-Cmini
4 本省線インクリメンタルシリーズ(電圧:100V)
FHA-8C
アクチュエータ型番
アクチュエータ減速比
30
50
FHA-11C
100
30
HA-800C-1C-100
ドライバ組合せ
50
FHA-14C
100
30
HA-800C-1C-100
50
6304
6314
6334
6504
6514
6534
6704
6714
6734
40
40
40
40
40
40
40
40
40
35
35
35
45
45
45
80
80
80
20
20
20
20
20
20
20
20
20
AJ04
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
6000
6000
6000
6000
6000
6000
6000
6000
6000
SP60
自動ゲイン(初期値)
1
1
1
1
1
1
1
1
1
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
AJ01
AJ02
付録
SP69
付-3
10
11
付
100
HA-800C-1C-100
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
d13
AJ00
付
SHA25-CG(-S)
121
8611
8612
ドライバ組合せ
付
101
HA-800C-6D/E-100
ドライバ組合せ
7
8
81
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
AJ02
4
SHA25-SG
アクチュエータ型番
アクチュエータ減速比
付
付録-1 出荷時設定
1
2
3
FHA-Cmini
5
6
アクチュエータ減速比
30
50
FHA-11C
100
30
HA-800C-1D-200
ドライバ組合せ
50
FHA-14C
100
30
HA-800C-1D-200
50
100
6201
6211
6231
6401
6411
6431
6601
6611
6631
40
40
40
40
40
40
40
40
40
21
21
21
27
27
27
48
48
48
20
20
20
20
20
20
20
20
20
AJ04
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
6000
6000
6000
6000
6000
6000
6000
6000
6000
SP60
自動ゲイン(初期値)
1
1
1
1
1
1
1
1
1
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
0
0
0
d13
AJ00
AJ01
SP69
FHA-Cmini
アクチュエータ減速比
FHA-8C
30
50
FHA-11C
100
30
HA-800C-1D-100
ドライバ組合せ
50
100
30
HA-800C-1D-100
50
6331
6501
6511
6531
6701
6711
6731
40
40
40
40
40
40
40
40
40
21
21
21
27
27
27
48
48
48
20
20
20
20
20
20
20
20
20
AJ04
150
150
150
150
150
150
150
150
150
SP49
許容位置偏差(初期値)
1500
1500
1500
1500
1500
1500
1500
1500
1500
SP51
速度入力係数(初期値)
6000
6000
6000
6000
6000
6000
6000
6000
6000
SP60
自動ゲイン(初期値)
1
1
1
1
1
1
1
1
1
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
8192
8192
8192
8192
8192
8192
8192
8192
8192
0
0
0
0
0
0
0
0
0
SP69
FHA-C
6
4 本省線インクリメンタルシリーズ
FHA-17C
アクチュエータ型番
アクチュエータ減速比
50
100
160
50
100
8
9
10
11
(電圧:200V)
FHA-25C
HA-800C-3C-200
ドライバ組合せ
7
100
6311
AJ02
5
HA-800C-1D-100
6301
AJ01
4
FHA-14C
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
AJ00
3
アブソリュートシリーズ(電圧:100V)
アクチュエータ型番
d13
2
HA-800C-1D-200
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
7
8
FHA-8C
アクチュエータ型番
AJ02
4
1
アブソリュートシリーズ(電圧:200V)
FHA-32C
160
50
HA-800C-3C-200
100
付
FHA-40C
160
50
HA-800C-6C-200
100
160
HA-800C-6C-200
5237
5247
5417
5437
5447
5617
5637
5647
5717
5737
5747
40
40
40
40
40
40
40
40
40
40
40
40
25
25
25
50
50
50
80
80
80
120
120
120
40
40
40
40
40
40
40
40
40
40
40
40
10
10
10
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
4800
4800
4800
4500
4500
4500
4000
4000
4000
3500
3500
3500
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
AJ00
AJ01
AJ02
SP69
付
付
付録
5217
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
d13
付-4
付録-1 出荷時設定
1
2
3
FHA-C
5
6
50
50
100
FHA-32C
160
50
HA-800C-6C-100
100
160
HA-800C-6C-100
5117
5137
5147
5317
5337
5347
5517
5537
5547
40
40
40
37
37
37
50
50
50
50
50
50
50
50
50
120
120
120
40
40
40
40
40
40
40
40
40
AJ04
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
4800
4800
4800
4500
4500
4500
4000
4000
4000
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
d13
AJ00
AJ01
SP69
FHA-C
(電圧:200V)
アブソリュ-トシリーズ
FHA-17C
アクチュエータ型番
アクチュエータ減速比
50
100
FHA-25C
160
50
HA-800C-3A-200
ドライバ組合せ
100
FHA-32C
160
50
HA-800C-3A-200
100
FHA-40C
160
50
HA-800C-6A-200
100
160
HA-800C-6A-200
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
4800
4800
4800
4500
4500
4500
4000
4000
4000
3500
3500
3500
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
d13
AJ00
AJ02
SP69
FHA-C
5218
5238
5248
5418
5438
5448
5618
5638
5648
5718
5738
5748
40
40
40
40
40
40
40
40
40
40
40
40
25
25
25
50
50
50
80
80
80
120
120
120
40
40
40
50
50
50
40
40
40
70
70
70
10
10
10
10
10
10
10
10
10
10
10
10
(電圧:100V)
アブソリュ-トシリーズ
FHA-17C
アクチュエータ型番
アクチュエータ減速比
50
100
FHA-25C
160
50
HA-800C-3A-100
ドライバ組合せ
100
50
HA-800C-6A-100
100
HA-800C-6A-100
5138
5148
5318
5338
5348
5518
5538
5548
40
40
40
37
37
37
50
50
50
50
50
50
50
50
50
120
120
120
40
40
40
50
50
50
40
40
40
AJ04
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
4800
4800
4800
4500
4500
4500
4000
4000
4000
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
AJ01
AJ02
付録
SP69
付-5
11
160
5118
d13
10
付
FHA-32C
160
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
AJ00
付
FHA-25C
160
HA-800C-3C-100
ドライバ組合せ
AJ01
付
100
(電圧:100V)
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
7
8
FHA-17C
アクチュエータ型番
アクチュエータ減速比
AJ02
4
4 本省線インクリメンタルシリーズ
付
付録-1 出荷時設定
1
RSF
アクチュエータ型番
2
アクチュエータ減速比
4
5
6
RSF-17A
50
100
RSF-20A
50
100
RSF-25A
50
100
RSF-32A
50
100
HA-800C-3B-200
HA-800C-3B-200
7365
7375
7465
7475
7565
7575
7665
7675
7685
50
50
30
30
50
50
50
50
50
30
30
35
35
40
40
50
50
50
50
50
30
30
50
50
50
50
50
AJ04
適用アクチュエータ
コード
位置ループゲイン
(初期値)
速度ループゲイン
(初期値)
速度ループ積分補償
(初期値)
位置決め完了範囲
(初期値)
10
10
10
10
10
10
10
10
10
SP49
許容位置偏差(初期値)
100
100
100
100
100
100
100
100
100
SP51
速度入力係数(初期値)
3000
3000
3000
3000
3000
3000
3000
3000
3000
SP60
自動ゲイン(初期値)
0
0
0
0
0
0
0
0
0
SP61
エンコーダモニタ
出力パルス数(初期値)
フィードフォワード制御
機能設定
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
AJ00
AJ01
AJ02
SP69
2
160
HA-800C-3B-200
ドライバ組合せ
d13
3
1
14 本線インクリメンタルシリーズ (電圧:200V)
HA-800C-6B-200
3
4
5
6
7
7
8
8
9
10
11
付
付
付録
付
付-6
付録-2 回生抵抗について
1
2
3
4
5
6
7
付録-2 回生抵抗について
ここではドライバ内蔵回生抵抗器と外付け回生抵抗について説明します。
ドライバ内蔵回生抵抗器と回生電力
機械の動作制動時に機械側(アクチュエータを含む)の回転エネルギーが、電気エネルギーとしてド
ライバ側に返還されることを回生と言います。返還されるエネルギーを回生エネルギー、単位時間あ
たりの回生エネルギーを回生電力と言います。
回生エネルギーは、ドライバ内部の電源平滑コンデンサに電気エネルギーとして吸収されます。しか
し、制動時の回生エネルギーが大きくなり、コンデンサが吸収可能なエネルギーを超えた場合、さら
に回生抵抗器で回生エネルギーを吸収(消費)します。
HA-800 ドライバは、下表に示すように回生抵抗器内蔵タイプと非内蔵タイプがあります。ドライバ内
の回生抵抗器で吸収(消費)しきれない回生電力、回生エネルギーが発生した場合外付け回生抵抗器
の接続が可能です。
電源電圧
型式
HA-800C-1
ドライバ定格電流
1.5 A
回生処理
8
内蔵回生抵抗吸収電力
内蔵回生抵抗使用時、
1 回の回生動作(制動)
における許容吸収
エネルギー
(繰り返し動作)
内蔵回生抵抗使用時、
1 回の回生動作(制動)
における許容吸収
エネルギー
(非繰り返し動作)
説明
付
200V 仕様/100V 仕様
HA-800C-3
外部回生抵抗
取付け端子付
-
30J(200V 仕様)
53J(100V 仕様)
*1, *2
回生抵抗器は内蔵していませ
ん。通常、外置き回生抵抗は
不要です。ドライバ内部の平
滑コンデンサでは回生エネル
ギ ー が吸 収 しき れ ない 場合
に、外付け回生抵抗器を接続
してください。
3.0 A
HA-800C-6
200V 仕様
HA-800C-24
6A
24A
回生抵抗内蔵
外部回生抵抗取付け端子付
3W Max
8W Max
90J(200V 仕様)
110J(100V 仕様)
*2
220J(200V 仕様)
260J(100V 仕様)
*2
150J
420J
90W Max
1600J
*2
2400J
内蔵回生抵抗器の吸収電力では回生電力が吸収しきれない
場合には、外付け回生抵抗器を接続してください。
*1:電解コンデンサによる吸収電力の標準値です。
*2:200V 仕様は電源電圧 AC200V 入力時の標準値です。100V 仕様は電源電圧 AC100V 入力時の標準
値です。
回生エネルギーの検討
付
付録
以下のようなときに回生抵抗の設置について検討してください。
慣性モーメントが大きく負荷の高い起動
停止頻度が多い時
上下動負荷などの連続的に回生が生じる場合
このような場合は、回生エネルギーを計算し、回生抵抗器吸収電力を確認して、ドライバ内蔵回生抵
抗器で吸収しきれない場合は、外付け回生抵抗器を付けてください。
付-7
10
11
付
付
付録-2 回生抵抗について
1
1
回生エネルギーの計算
下図のような機械系の動作をする時の回生エネルギーを計算します。
アクチュエータ
3
(上昇)
負荷アーム
4
マイナストルク Tn (下降)
5
アクチュエータ回転速度
2
2
ta(1 サイクル)
3
NC
上昇
時間
下降
t1
t2
t3
t4
t5
t6
t7 t 8
5
(+)
① (力行)
トルク
6
7
6
⑤
②
④
⑧
7
⑥
(回生) ③
8
8
⑦
(-)
9
Tn:負荷のマイナストルク
Tf:駆動系の摩擦トルク
Ja:アクチュエータの慣性モーメント
Jm:負荷の慣性モーメント
Nc:アクチュエータ動作時の最大回転数(r/min)
ステップ
①
②
③
④、⑧
⑤
⑥
⑦
アクチュエータの出力トルク
T1=(Ja+Jm)×{(2π×Nc)/60}
×(1/t1)+Tn+Tf
T2=Tn+Tf
10
アクチュエータの出力エネルギー
11
E1=1/2×{(2π×Nc)/60}×T1×t1
E2=(2π×Nc)/60}×T2×t2
付
T3=-(Ja+Jm)×{(2π×Nc)/60} E3=1/2×{(2π×Nc)/60}×T3×t3
×(1/t3)+Tn+Tf
T4=Tn
0 (停止状態のため回生エネルギーとしては 0)
T5=(Ja+Jm)×{(2π×Nc)/60}
×(1/t5)-Tn+Tf
T6=-Tn+Tf
4
付
E5=1/2×{(2π×Nc)/60}×T5×t5
E6=(2π×Nc)/60}×T6×t6
T7=-(Ja+Jm)×{(2π×Nc)/60} E5=1/2×{(2π×Nc)/60}×T7×t7
×(1/t7)-Tn+Tf
Es=▏ E3+E6+E7 ▏
付-8
付
付録
E1~E8 までの各エネルギーのうち、負の値になるエネルギーの総和の絶対値が回生エネルギー
<Es>となります。
上記で、E3、E6、E7 が負の値であれば、その合計回生エネルギーは次のようになります。
付録-2 回生抵抗について
1
2
外付け回生抵抗器で吸収するエネルギー
HA-800C ドライバの電源平滑コンデンサで吸収できる回生エネルギーと内蔵回生抵抗器 R の容量は下
表の通りです。
内蔵コンデンサ
吸収エネルギー
Ec(J)*1
吸収容量 Wi(W)*2
抵抗値(Ω)
外付け最小許
容抵抗値(Ω)
HA-800C-1
30
-
-
33Ω-5%
HA-800C-3
30
3W Max
50Ω±5%
33Ω-5%
HA-800C-6
52
8W Max
33Ω±5%
33Ω-5%
HA-800C-24
78
90W Max
10Ω±5%
10Ω-5%
ドライバ型式
3
4
5
6
*1:コンデンサ吸収エネルギーEc の値は、ドライバの使用主電源電圧 AC200V におけるコンデンサの標準吸
収量です。内蔵コンデンサ吸収エネルギーは電源電圧、駆動パターンにより大きく変化します。また経時変
化もあります。標準吸収量の 50%を目安とする減定格をして、計算をしてください。
*2:内蔵回生抵抗の吸収容量 Wi とは、抵抗器の定格容量を減定格した、吸収可能な回生電力です。
上記の各数値より回生抵抗器で吸収しなければならない回生エネルギーを求めます。その回生エネル
ギーを運転サイクル時間で除算し、回生抵抗器にて吸収が必要な回生電力<We>を計算します。
7
8
内蔵回生抵抗器仕様
We[W]=(Es-Ec)/ ta
We が内蔵回生抵抗吸収容量 Wi 以下である場合は、外付回生抵抗器は不要です。We が Wi を超える場
合は、We の容量に従って外付回生抵抗器を選定します。抵抗値は、表の最小許容抵抗値以上の抵抗値
を選定してください。
外付回生抵抗を使用する場合は、ショートバーを外して内蔵回生抵抗を回路から分離します。内蔵回
生抵抗による回生吸収がなくなり、内蔵回生抵抗の発熱がなくなります。このため、大型の外付回生
抵抗を接続することが可能です。
※HA-800*-24 は、回生電力のモニタが可能です。
10
11
付
付
付
付
付録
付-9
付録-2 回生抵抗について
1
2
3
4
5
1
外付け回生抵抗器
外付けの回生抵抗器はお客様にて準備してください。以下の例を参考に回生抵抗器を選択してくださ
い。
推奨品の一例
ドライバ型式
HA-800C-1
HA-800C-3
HA-800C-6
HA-800C-24
抵抗器
RH220B33ΩJ
株式会社
磐城無線研究所
RH500 20ΩJ (2 個並列接続)
株式会社 磐城無線研究所
RH500 10ΩJ (4 個直列並列接続)
株式会社 磐城無線研究所
6
備考
許容吸収電力:20W~30W 程度(冷却条件による)
1 回の回生動作における許容吸収エネルギー:2200J
許容吸収電力:150W 程度(冷却条件による)
1 回の回生動作における許容吸収エネルギー:13000J
2 個の抵抗器を並列接続してください。
(下記接続例参照)
許容吸収電力:300W 程度(冷却条件による)
1 回の回生動作における許容吸収エネルギー:36000J
4 個の抵抗器を直列並列接続してください。
(下記接続例参照)
2
3
4
5
6
外付け回生抵抗器の減定格
7
8
回生抵抗器の温度上昇
回生抵抗器に使用するパワー抵抗器は、大きな電力を消費し高熱になります。かならず抵抗器の
定格電力を減定格してお使いください。適切な減定格をしないと、抵抗器が数百度を超える高温
になったり、抵抗器の寿命が短くなる等の問題が生じます。
減定格
抵抗器の負荷特性は製造メーカに確認してください。減定格については自然対流冷却で使用する
場合は定格の 20%以下としますが、お客様の社内基準に従ってください。
8
9
10
外付け回生抵抗器の配置と配線
配置
回生抵抗器は周囲温度に対して+100℃以上の温度上昇があります。放熱、取付け位置および使
用電線などは十分考慮して配置してください。
配線
配線に使用する電線は難燃電線を使用して、抵抗器本体に接触しないように配線してください。
サーボアンプとの接続は必ずツイスト線を使用し、線材の長さは 5m 以下で配線してください。
回生抵抗器は高温になります。放熱取付け位置および使用電線などは安
全に十分注意して配置してください。
注
7
11
付
付
意
付録
付
付-10
付録-2 回生抵抗について
1
ドライバへの接続
外付け回生抵抗は、HA-800 ドライバの「R1,R2」端子間に接続してください。
2
赤
U
白
V
3
M
黒
W
R2
回生抵抗
R3
4
AC サーボアクチュエータ
HA-800C-3/6 にて内蔵回生抵抗を使用する場合、R1,R3 をショート
してください。
(当社製の中継ケーブルでは、ショートバーにてショ
ートしています)
外付けの回生抵抗を使用する場合は、R1,R3 をオープンにして、
R1,R2 間に回生抵抗を接続してください。
R1
5
6
U
V
W
R2
R3
R1
モータ接続用端子台(TB1 用)
メーカー
7
フェニックス・コンタクト
株式会社
FKIC2.5/6-ST-5.08
型式
8
TB1
HA-800C-24 にて内蔵回生抵抗を使用する場合、R1,R3 をショートして
ください。
(当社出荷時は、ショートバーにてショートしています)
外付けの回生抵抗を使用する場合は、R1,R3 をオープンにして、R1,R2
間に回生抵抗を接続してください。
R3
R1
外付回生抵抗器
R2
U
10
赤
V
白
W
黒
M
AC サーボアクチュエータ
11
モータ接続用端子台
ネジサイズ
圧着端子外径
M4
付
φ8mm
丸型圧着端子(R 型)
回生電力 300W の場合
RH500 20ΩJ(2 個)
RH500 10ΩJ(4 個)
R3
R3
R1
R1
付録
R2
U
V
白
W
黒
付-11
R2
赤
U
M
AC サーボアクチュエータ
付
付
外付回生抵抗器の接続例
回生電力 150W の場合
付
ご参考
3.5-R4 (日本圧着端子製造(株))
5.5-4NS (日本圧着端子製造(株))
赤
V
白
W
黒
M
AC サーボアクチュエータ
付録-2 回生抵抗について
1
2
3
4
1
許容負荷イナーシャ
下表は最高回転速度での水平駆動時の推奨の許容イナーシャ一覧です(電源電圧は 200V 仕様 AC200V、
100V 仕様 AC100V 入力時)。許容できる負荷イナーシャは、実使用時のモータ速度・運転パターン・
電源電圧によって変化します。)
回生抵抗(内蔵および外付)を使用する場合には、回生抵抗の許容吸収電力・許容吸収エネルギーの
範囲内でご使用ください。
2
SHA シリーズ(電圧:200V)
4
SHA20A-SG
アクチュエータ型番
121
161
59.4
49.6
37.3
0.58
0.91
1.30
2.3
2.4
6.0
9.3
13
24
0.26
0.65
1.00
1.4
2.6
2.6
6.6
10
15
26.0
0.93
2.3
3.6
5.1
7.7
kgf・cm・s2
9.5
23
37
52
78
kg・m2
1.7
3.8
4.8
5.8
7.7
kgf・cm・s2
17.3
39
49
59
78
2.4
(3.8)
(4.8)
(5.8)
(7.7)
25
(39)
(49)
(59)
(78)
アクチュエータ減速比
5
6
7
8
51
81
117.6
74.1
0.23
HA-800C-3D-200
ドライバ組合せ
r/min
最高回転速度
アクチュエータ
慣性モーメント
(ブレーキなし)
アクチュエータ
慣性モーメント
(ブレーキ付)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(繰り返し動作)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(非繰り返し動作)
外付回生抵抗使用時の
許容負荷慣性
モーメント
kg・m2
kgf・cm・s
kg・m
2
kgf・cm・s
kg・m
kg・m
2
2
2
2
kgf・cm・s
2
RH220B33ΩJ
外付回生抵抗器
11
51
161
509.1
109.8
69.1
0.029
0.56
0.30
101
55.4
46.3
34.8
1.4
2.2
3.2
5.6
5.7
14
22
32
57
0.034
0.66
1.7
2.6
3.7
6.6
0.35
6.7
17
26
38
67
0.034
0.79
2.0
3.1
4.4
7.9
kgf・cm・s2
0.347
8.1
20.4
31.6
44.9
80.6
kg・m2
0.071
1.3
3.4
5.4
7.7
13.8
0.724
13.2
34.7
55.1
78.5
140
0.32
5.6
8.8
11
14
20
3.3
57
90
112
144
201
HA-800C-3D-200
ドライバ組合せ
外付回生抵抗使用時の
許容負荷慣性
モーメント
81
r/min
kg・m2
kgf・cm・s
2
kg・m2
kgf・cm・s
kg・m
2
kgf・cm・s
kg・m
2
2
2
kgf・cm・s2
外付回生抵抗器
6
7
8
9
RH220B33ΩJ
付-12
11
付
付
付
付録
121
アクチュエータ減速比
5
10
SHA25A-SG/HP
アクチュエータ型番
最高回転速度
アクチュエータ
慣性モーメント
(ブレーキなし)
アクチュエータ
慣性モーメント
(ブレーキ付)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(繰り返し動作)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(非繰り返し動作)
101
3
付録-2 回生抵抗について
1
SHA32A-SG/HP
アクチュエータ型番
11
アクチュエータ減速比
2
3
4
5
6
7
kg・m
kgf・cm・s
付録
付-13
161
59.3
47.5
39.7
29.8
0.091
2.0
5.1
8.0
11
20
0.93
21
52
81
117
207
0.11
2.3
5.9
9.2
13
23
1.1
24
60
94
135
238
0.1065
2.3
5.9
9.2
13
23
1.087
24
60
94
135
238
0.277
6.0
15.3
24
33
60
2.827
61.2
156
244
336
612
0.99
20
32
40
50
70
10
200
320
400
510
710
2
2
kg・m2
kgf・cm・s
2
kg・m2
kgf・cm・s
2
kg・m2
kgf・cm・s
2
RH220B33ΩJ
外付回生抵抗器
SHA40A-SG
51
81
101
121
161
51
HA-800C-6D-200
最高回転速度
r/min
2
アクチュエータ
kg・m
慣性モーメント
2
kgf・cm・s
(ブレーキなし)
2
kg・m
アクチュエータ
慣性モーメント
2
kgf・cm・s
(ブレーキ付)
付
121
94.1
kg・m2
ドライバ組合せ
外付回生抵抗使
用時の
許容負荷慣性
モーメント
101
436.4
アクチュエータ型番
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
付
2
kgf・cm・s
外付回生抵抗使用時の
許容負荷慣性
モーメント
81
HA-800C-6D-200
r/min
最高回転速度
アクチュエータ
慣性モーメント
(ブレーキなし)
アクチュエータ
慣性モーメント
(ブレーキ付)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(繰り返し動作)
内蔵回生抵抗使用時の
許容負荷慣性モーメント
(非繰り返し動作)
アクチュエータ減速比
8
51
ドライバ組合せ
81
101
121
161
HA-800C-24D-200
78.4
49.4
39.6
33.1
24.8
78.4
49.4
39.6
33.1
24.8
5.0
13
20
28
50
5.0
13
20
28
50
51
130
202
290
513
51
130
202
290
513
6.1
15
24
34
61
6.1
15
24
34
61
62
157
244
350
619
62
157
244
350
619
1.2
3
4.8
6.8
12.2
40
92
114
137
182
12.2
30.6
49
69
124
408
930
1170
1400
1860
6.1
15
24
34
61
58
92
114
137
182
62.2
153
244
346
622
590
930
1170
1400
1860
kg・m2
58
92
114
137
182
(58)
(92)
(114)
(137)
(182)
kgf・cm・
s2
590
930
1170
1400
1860
(590)
(930)
(1170)
(1400)
(1860)
kg・m
2
kgf・cm・s
kg・m
2
2
kgf・cm・s
2
外付回生
抵抗器
RH220B33ΩJ
RH500_20ΩJ を 2 個並列接続 または、
RH500_10ΩJ を 4 個直列並列接続
10
11
付
付
付録-2 回生抵抗について
1
2
3
4
5
6
7
8
SHA58A-SG
アクチュエータ型番
81
アクチュエータ減速比
最高回転速度
r/min
アクチュエータ
kg・m2
慣性モーメント
2
(ブレーキなし) kgf・cm・s
kg・m2
アクチュエータ
慣性モーメント
kgf・cm・s2
(ブレーキ付)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗使
用時の
許容負荷慣性
モーメント
101
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗使
用時の
許容負荷慣性
モーメント
101
121
161
HA-800C-24D-200
24.8
18.6
34.6
27.7
23.1
17.4
96
149
214
379
110
171
245
433
980
1520
2180
3870
1120
1740
2500
4420
106
165
237
420
120
187
268
475
1090
1690
2420
4290
1230
1910
2740
4850
111
173
249
441
128
200
288
508
1133
1765
2541
4500
1306
2041
2939
5184
kg・m2
212
330
474
840
240
374
536
950
kgf・cm・s2
2160
3360
4830
8570
2440
3810
5460
9690
kg・m2
290
450
640
1140
360
560
810
1420
kgf・cm・s2
外付回生
抵抗器
2900
4600
6500
11600
3700
5700
8200
14500
kg・m
2
kgf・cm・s
2
kg・m
kgf・cm・
s2
kg・m2
kgf・cm・
s2
kg・m2
4
5
6
SHA20A-CG
SHA25A-CG(-S)
80
100
120
160
50
HA-800C-3D/E-200
2
3
RH500_20ΩJ を 2 個並列接続 または、
RH500_10ΩJ を 4 個直列並列接続
50
r/min
2
RH500_20ΩJ を 2 個並列接続 または、
RH500_10ΩJ を 4 個直列並列接続
ドライバ組合せ
アクチュエータ
慣性モーメント
(ブレーキ付)
81
29.7
アクチュエータ減速比
アクチュエータ
慣性モーメント
(ブレーキなし)
161
37.0
アクチュエータ型番
最高回転速度
121
HA-800C-24D-200
ドライバ組合せ
1
SHA65A-SG
80
100
120
160
HA-800C-3D/E-200
120
75
60
50
37.5
112
70
56
46.7
35
0.21
0.53
0.82
1.2
2.1
0.50
1.3
2.0
2.9
5.1
2.1
5.4
8.0
12
22
5.1
13
20
29
52
0.23
0.60
0.94
1.3
2.4
0.60
1.5
2.4
3.4
6.1
2.4
6.1
9.6
14
24
6.1
16
24
35
62
0.93
2.3
3.6
5.1
7.7
0.72
1.8
2.9
4.1
7.3
kgf・cm・
s2
9.5
23
37
52
78
7.3
18
30
42
74
kg・m2
1.6
3.8
4.8
5.8
7.7
1.6
3.9
6.2
8.8
16
kgf・cm・
s2
16.3
39
49
59
78
16.3
40
63
90
163
2.4
(3.8)
(4.8)
(5.8)
(7.7)
5.6
8.8
11
14
20
25
(39)
(49)
(59)
(78)
57
90
112
144
201
kg・m2
kgf・cm・
s2
外付回生
抵抗器
RH220B33ΩJ
7
8
9
10
11
付
付
RH220B33ΩJ
付録
付
付-14
付録-2 回生抵抗について
1
2
3
4
5
6
7
8
SHA32A-CG(-S)
アクチュエータ型番
50
アクチュエータ減速比
100
120
160
HA-800C-6D/E-200
ドライバ組合せ
最高回転速度
r/min
96
60
48
40
30
アクチュエータ
慣性モーメント
(ブレーキなし)
kg・m2
kgf・cm・
s2
kg・m2
kgf・cm・
s2
kg・m2
1.7
4.3
6.7
9.7
17
17
44
68
99
175
2.0
5.1
7.9
11
20
20
52
81
116
207
2.4
6.1
9.5
13
24
kgf・cm・
s2
24
62
97
133
245
kg・m2
6
15
24
34
61
kgf・cm・
s2
61
153
245
347
622
20
32
40
50
70
200
320
400
510
710
アクチュエータ
慣性モーメント
(ブレーキ付)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗使
用時の
許容負荷慣性
モーメント
kg・m2
kgf・cm・
s2
外付回生
抵抗器
RH220B33ΩJ
SHA40A-CG(-S)
アクチュエータ型番
50
アクチュエータ減速比
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗使
用時の
許容負荷慣性
モーメント
付
付録
付-15
kg・m
2
kgf・cm・s
kg・m
2
2
kgf・cm・s
kg・m
80
100
120
160
50
HA-800C-6D/E-200
ドライバ組合せ
r/min
最高回転速度
2
アクチュエータ
kg・m
慣性モーメント
2
kgf・cm・s
(ブレーキなし)
2
kg・m
アクチュエータ
慣性モーメント
2
kgf・cm・s
(ブレーキ付)
付
80
2
2
kgf・cm・s
2
外付回生
抵抗器
80
100
120
160
HA-800C-24D/E-200
80
50
40
33.3
25
80
50
40
33.3
25
4.8
12
19
27
49
4.8
12
19
27
49
49
124
194
280
497
49
124
194
280
497
5.8
15
23
33
59
5.8
15
23
33
59
59
150
235
338
601
59
150
235
338
601
1.04
2.7
4.1
5.9
11
40
92
114
137
182
11
28
42
60
112
408
930
1170
1400
1860
5.8
15
23
33
59
58
92
114
137
182
59
153
235
337
602
590
930
1170
1400
1860
58
92
114
137
182
(58)
(92)
(114)
(137)
(182)
590
930
1170
1400
1860
(590)
(930)
(1170)
(1400)
(1860)
RH220B33ΩJ
RH500_20ΩJ を 2 個並列接続 または、
RH500_10ΩJ を 4 個直列並列接続
10
11
付
付
付録-2 回生抵抗について
1
2
3
4
5
6
7
8
1
SHA シリーズ(電圧:100V)
アクチュエータ減速比
51
81
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗使用
時の許容負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗使
用時の
許容負荷慣性
モーメント
101
121
161
50
80
HA-800C-6D/E-100
ドライバ組合せ
最高回転速度
r/min
アクチュエータ
kg・m2
慣性モーメント
2
(ブレーキなし) kgf・cm・s
アクチュエータ
kg・m2
慣性モーメント
kgf・cm・s2
(ブレーキ付)
SHA25A-CG(-S)
SHA25A-SG
アクチュエータ型番
100
120
160
HA-800C-6D/E-100
94.1
59.2
47.5
39.6
29.8
96
60
48
40
30
0.56
1.42
2.2
3.2
5.6
0.50
1.3
2.0
2.9
5.1
5.7
14.4
22
32
57
5.1
13.0
20
29
52
0.66
1.66
2.6
3.7
6.6
0.60
1.5
2.4
3.4
6.1
6.7
17
26
38
67
6.1
16
24
35
62
kg・m2
3.3
8.0
11
14
20
3.7
8.8
11
14
20
kgf・cm・s2
33.7
82
112
144
201
38
90
112
144
201
kg・m2
5.6
8.8
11
14
20
5.6
8.8
11
14
20
kgf・cm・s2
57
90
112
144
201
57
90
112
144
201
kg・m2
(5.6)
(8.8)
(11)
(14)
(20)
(5.6)
(8.8)
(11)
(14)
(20)
kgf・cm・s2
外付回生
抵抗器
(57)
(90)
(112)
(144)
(201)
(57)
(90)
(112)
(144)
(201)
RH220B33ΩJ
RH220B33ΩJ
ドライバ組合せ
最高回転速度
アクチュエータ
慣性モーメント
回生抵抗未接続
時の許容負荷慣
性モーメント
(繰り返し動作)
回生抵抗未接続
時の許容負荷慣
性モーメント
r/min
FHA-8C
30
50
100
HA-800C-1*-100
HA-800C-1*-200
200
120
60
FHA-11C
30
50
100
HA-800C-1*-100
HA-800C-1*-200
200
120
60
FHA-14C
30
50
100
HA-800C-1*-100
HA-800C-1*-200
200
120
60
kg・m2
0.0026
0.0074
0.029
0.0060
0.017
0.067
0.018
0.050
0.20
kgf・cm・s2
0.027
0.075
0.30
0.061
0.17
0.68
0.18
0.51
2.0
kg・m2
0.0078
0.022
0.087
0.018
0.051
0.20
0.054
0.15
0.60
kgf・cm・s2
0.081
0.23
0.90
0.18
0.51
2.0
0.54
1.5
6.0
kg・m2
0.0078
0.022
0.087
0.018
0.051
0.20
0.054
0.15
0.60
kgf・cm・s2
0.081
0.23
0.90
0.18
0.51
2.0
0.54
1.5
6.0
kg・m2
(0.0078)
(0.022)
(0.087)
(0.018)
(0.051)
(0.20)
(0.054)
(0.15)
(0.60)
kgf・cm・s2
(0.081)
(0.23)
(0.90)
(0.18)
(0.51)
(2.0)
(0.54)
(1.5)
(6.0)
(非繰り返し動作)
外付回生抵抗
使用時の
許容負荷慣性
モーメント
外付回生
抵抗器
RH220B33ΩJ
3
4
5
6
7
8
FHA-C mini シリーズ(電圧:100V/200V)
アクチュエータ型番
アクチュエータ減速比
2
RH220B33ΩJ
9
10
11
付
付
RH220B33ΩJ
付録
付
付-16
付録-2 回生抵抗について
1
2
3
4
5
6
7
8
FHA-C シリーズ
(電圧:200V)
アクチュエータ型式
アクチュエータ減速比
ドライバ組合せ
最高回転速度
r/min
kg・m2
アクチュエー
FHA-25C
50
100
160
HA-800C-3*-200
90
45
28
0.81
3.2
8.3
FHA-32C
50
100
160
HA-800C-6*-200
80
40
25
1.8
7.1
18.1
FHA-40C
50
100
160
HA-800C-6*-200
70
35
22
4.9
19.5
50
タ慣性モーメ
ント
kgf・
cm・s2
1.7
6.9
17
8.3
33
85
18
72
185
50
200
510
内蔵回生抵抗
使用時の許容
負荷慣性
モーメント
kg・m2
0.54
2.1
5.1
1.26
5.1
12.9
4.7
18
48
3.5
14
36
kgf・cm・
s2
5.4
21
52
12.9
52
132
48
184
490
36
143
378
kg・m2
0.54
2.1
5.1
2.4
10
25
5.4
21
54
9.8
39
100
kgf・
cm・s2
5.4
21
52
24
100
260
55
210
550
100
398
1020
(0.54)
(2.1) (5.1)
2.4
10
25
5.4
21
54
15
60
150
(5.4)
(21)
24
100
260
55
210
550
150
610
1500
(繰り返し動作)
内蔵回生抵抗
使用時の許容
負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗
使用時の
許容負荷慣性
モーメント
kg・m2
kgf・
cm・s2
外付回
生
抵抗器
FHA-C シリーズ
内蔵回生抵抗
使用時の許容
負荷慣性
モーメント
(繰り返し動作)
内蔵回生抵抗
使用時の許容
負荷慣性
モーメント
(非繰り返し動作)
外付回生抵抗
使用時の
許容負荷慣性
モーメント
付
付録
付-17
(52)
RH220B33ΩJ
RH220B33ΩJ
RH220B33ΩJ
RH220B33ΩJ
(電圧:100V)
FHA-17C
50
100
160
HA-800C-3*-100
96
48
30
0.17
0.67
1.7
FHA-25C
50
100
160
HA-800C-6*-100
90
45
28
0.81
3.2
8.3
FHA-32C
50
100
160
HA-800C-6*-100
64
32
20
1.8
7.1
18.1
1.7
6.9
17
8.3
33
85
18
72
185
kg・m2
0.54
2.1
5.1
2.4
10
25
5.4
21
54
kgf・cm・
s2
5.4
21
52
24
100
260
55
210
550
kg・m2
0.54
2.1
5.1
2.4
10
25
5.4
21
54
kgf・cm・
s2
5.4
21
52
24
100
260
55
210
550
(0.54)
(2.1)
(5.1)
(2.4)
(10)
(25)
(5.4)
(21)
(54)
(5.4)
(21)
(52)
(24)
(100)
(260)
(55)
(210)
(550)
アクチュエータ型式
アクチュエータ減速比
ドライバ組合せ
最高回転速度
r/min
kg・m2
アクチュエー
タ慣性モーメ
kgf・cm・
ント
s2
付
FHA-17C
50
100
160
HA-800C-3*-200
96
48
27
0.17 0.67 1.7
kg・m2
kgf・cm・
s2
外付回生
抵抗器
RH220B33ΩJ
RH220B33ΩJ
RH220B33ΩJ
10
11
付
付
付録-3 ドライバ保持データ一覧
1
2
3
4
5
6
7
8
1
付録-3 ドライバ保持データ一覧
ドライバ内部の不揮発性メモリ(EEPROM)に保持されるデータの一覧と設定値操作方法の一覧です。
不揮発性メモリに保持されるデータは、4 種類あります。調整パラメータ、システムパラメータ、ネッ
トワークパラメータ、動作データ(ポイントテーブル)です。
調整パラメータ AJxx
記号
AJ00
AJ01
AJ02
AJ03
AJ04
AJ05
AJ06
AJ07
AJ08
AJ09
AJ10
AJ11
AJ12
AJ13
AJ14
AJ15
AJ16
AJ17
AJ18
AJ19
AJ20
AJ21
AJ22
AJ23
AJ24
AJ25
AJ26
AJ27
AJ28
AJ29
AJ30
AJ31
AJ32
AJ33
AJ34
AJ35
AJ36
AJ37
AJ38
AJ39
本体 表示パネ
ル
名称
位置ループゲイン
速度ループゲイン
速度ループ積分補償
フィードフォワードゲイン
位置決め完了範囲
速度到達判定値
トルク到達判定値
零速度判定値
システム予約 *1
システム予約 *1
システム予約 *1
トルク制限値
加減速時定数
システム予約 *1
システム予約 *1
システム予約 *1
速度モニタオフセット
電流モニタオフセット
システム予約 *1
システム予約 *1
フィードフォワードフィルタ
負荷慣性モーメント比
トルク定数補正係数
ばね定数補正係数
位置決め時自動ゲイン
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
*1
4
CC-Link 通信 *3
設定値表示
設定値編集
設定値表示
設定値編集
ファイル保存
(拡張子 psf)
(操作不可)
設定値表示
調整パラメータ読出し
(命令コード:0100~0113)
設定値編集
調整パラメータの変更(RAM)
(命令コード:8100~8113)
パラメータの一括 EEPROM 書込み
(命令コード:8280)
6
7
8
9
10
11
設定値表示
設定値編集
設定値表示
設定値編集
ファイル保存
(拡張子 psf)
設定値表示
ファイル保存
(拡張子 psf)
(操作不可)
(操作不可)
設定値表示
調整パラメータ読出し
(命令コード:0114~0127)
設定値編集
調整パラメータの変更(RAM)
(命令コード:8114~8127)
パラメータの一括 EEPROM 書込み
(命令コード:8280)
設定値表示
調整パラメータ読出し
(命令コード:0128~013B)
*1: システム予約領域となっているパラメータは変更しないでください。システム予約は工場出荷時の設定が個
体・バージョンにより異なる場合があります。
*2: PSF-800 を使用して、異なる個体間においてパラメータ転送を行いシステム予約の設定値が変化しても、製
品機能に影響はありません。
付-18
付
付
付
付録
システム予約
表示・編集・保存
動作データ設定
ソフトウェア
PSF-680CL
3
5
設定値表示
AJ40~AJ59
サーボパラメータ設定
ソフトウェア
PSF-800 *2
2
付録-3 ドライバ保持データ一覧
1
2
3
4
5
6
7
8
*3: CC-Link 通信機能を使用して調整パラメータを編集する場合、システム予約に対して調整パラメータの変更
(RAM)の命令を実行しないでください。
システムパラメータ SPxx
※ システムパラメータ(SP40~79)は、設定変更後に制御電源を再投入することで、設定変更が有効
になります。
記号
名称
SP40
SP41
SP42
SP43
SP44
SP45
SP46
SP47
SP48
SP49
SP50
SP51
SP52
SP53
SP54
SP55
SP56
SP57
SP58
SP59
CN9-CP3 出力信号設定
システム予約 *1
システム予約 *1
システム予約 *1
電子ギヤ1分子
電子ギヤ1分母
システム予約 *1
システム予約 *1
サーボON時偏差クリア
許容位置偏差
指令極性
速度入力係数
システム予約 *1
トルク入力係数
状態表示設定
DB 有効/無効設定
システム予約 *1
システム予約 *1
システム予約 *1
角度補正有効/無効設定
位置決め自動ゲイン
設定有効/無効設定
エンコーダモニタ出力パルス数
入力信号論理設定
出力信号論理設定
回生抵抗選択
正転/逆転禁止時動作
アブソリュートエンコーダ機能設定
出力軸分割機能設定
電子ギヤ機能設定
フィードフォワード制御機能設定
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
SP60
付
付
SP61
SP62
SP63
SP64
SP65
SP66
SP67
SP68
SP69
SP70
SP71
SP72
SP73
SP74
SP75
SP76
SP77
SP78
SP79
本体 表示パネル
設定値表示
設定値編集
サーボパラメータ設定
ソフトウェア
PSF-800 *2
設定値表示
設定値編集
ファイル保存
(拡張子 psf)
表示・編集・保存
動作データ設定
ソフトウェア
PSF-680CL
(操作不可)
CC-Link 通信 *3
設定値表示
システムパラメータ読出し
(命令コード:0200~0213)
設定値編集
システムパラメータの変更(RAM)
(命令コード:8200~8213)
パラメータの一括 EEPROM 書込み
(命令コード:8280)
10
設定値表示
設定値編集
設定値表示
設定値編集
ファイル保存
(拡張子 psf)
(操作不可)
設定値表示
システムパラメータ読出し
(命令コード:0214~0227)
設定値編集
システムパラメータの変更(RAM)
(命令コード:8214~8227)
パラメータの一括 EEPROM 書込み
(命令コード:8280)
付録
*1: システム予約領域となっているパラメータは変更しないでください。システム予約は工場出荷時の設定が個
体・バージョンにより異なる場合があります。
*2: PSF-800 を使用して、異なる個体間においてパラメータ転送を行いシステム予約の設定値が変化しても、製
品機能に影響はありません。
*3: CC-Link 通信機能を使用してシステムパラメータを編集する場合、システム予約に対してシステムパラメー
タの変更(RAM)の命令を実行しないでください。
付-19
11
付
付
付録-3 ドライバ保持データ一覧
1
2
3
4
5
6
7
8
1
ネットワークパラメータ
表示・編集・保存
記号
ネットワーク 00
ネットワーク 01
ネットワーク 02
ネットワーク 03
ネットワーク 04
ネットワーク 05
ネットワーク 06
ネットワーク 07
ネットワーク 08
ネットワーク 09
ネットワーク 10
ネットワーク 11
ネットワーク 12
ネットワーク 13
ネットワーク 14
ネットワーク 15
ネットワーク 16
ネットワーク 17
ネットワーク 18
ネットワーク 19
名称
アクチュエータ分解能 *9
システム予約 *1
原点復帰速度 1
システム予約 *1
原点復帰速度 2
原点復帰加速減速時間
原点復帰方向
仮想原点 *9
RXn1 最小 OFF 時間 *4
バックラッシュ補正
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
システム予約 *1
近回り有効/無効
原点復帰方法
原点センサ選択
本体 表示パネル
サーボパラメータ設定
ソフトウェア
PSF-800 *2
動作データ設定
ソフトウェア
PSF-680CL *4
CC-Link 通信 *3
2
3
(操作不可)
設定値表示
設定値編集
ファイル保存
(拡張子 psf)
設定値表示
設定値編集
設定値表示(読出し)
設定値編集(書込み)
※詳細は下表
7
ネットワーク 00
パラメータ名称
アクチュエータ分解能
*9
PSF-680CL
パラメータ名称 *6
分解能 *9
8
9
10
ネットワークパラメータ(詳細)
記号
5
6
*1: システム予約となっているパラメータは変更しないでください。システム予約は工場出荷時の設定が個体・
バージョンにより異なる場合があります。
*2: PSF-800 を使用して異なる個体間においてパラメータ転送を行いシステム予約の設定値が変化しても、製品
機能に影響はありません。
*3: CC-Link 通信機能を使用してネットワークパラメータを編集する場合、システム予約への操作はできません。
*4: PSF-680CL を使用してパラメータを編集する場合、システム予約への操作はできません。RXn1 最小 OFF
時間の操作はできません。
*9: アクチュエータ分解能、仮想原点は設定変更後に制御電源を再投入することで、設定変更が有効になります。
PSF-800
4
CC-Link 通信
設定値表示
(読出し)の
命令コード
設定値編集
(書込み)の
命令コード *5
0B00
9200
アクチュエータ一回転移動量(上位 16bit) *9 0B01
9201
原点復帰速度 1(下位 16bit)
0B02
9202
CC-Link 通信上の名称
アクチュエータ一回転移動量(下位 16bit) *9
ネットワーク 02
原点復帰速度 1
原点復帰速度 1
原点復帰速度 1(上位 16bit)
0B03
9203
ネットワーク 04
原点復帰速度 2
原点復帰速度 2
原点復帰速度 2
0B04
9204
ネットワーク 05
原点復帰加速減速時間
原点復帰加減速
原点復帰加減速時定数
0B05
9205
ネットワーク 06
原点復帰方向
原点復帰方向
原点復帰方向
0B06
9206
ネットワーク 07
仮想原点 *9
仮想原点 *9
ネットワーク 08
RXn1 最小 OFF 時間
- *7
動作完了(RXn1)OFF 時間
0B0E
920E
ネットワーク 09
バックラッシュ補正
バックラッシュ補正
バックラッシュ補正値
0B0A
920A
ネットワーク 17
近回り有効/無効
近回り
近回り有効無効
0B0B
920B
ネットワーク 18
原点復帰方法
原点復帰方法
原点復帰方法
0B07
9207
ネットワーク 19
原点センサ選択
原点センサ選択
原点センサ選択
0B08
9208
11
付
付
仮想原点(下位 16bit) *9
0B0C(0B09)
920C(9209)
仮想原点(上位 16bit) *9
0B0D
920D
付録
付
*5: CC-Link 通信からネットワークパラメータに書込みを実施すると、RAM および EEPROM の双方へ書込みを
行います。
付-20
付録-3 ドライバ保持データ一覧
1
2
3
4
5
6
7
8
*6: PSF-680CL から「パラメータを送信する」にチェックを付けてデータ送信を実行すると、RAM および
EEPROM の双方へ書込みを行います。
*7: PSF-680CL から RXn1 最小 OFF 時間の表示・編集はできません。
*8: ネットワークパラメータの設定内容は、本書の「13-4 通信プロファイル」または、別資料「PSF-680CL 操
作マニュアル」をご参照ください。
*9: アクチュエータ分解能、仮想原点は設定変更後に制御電源を再投入することで、設定変更が有効になります。
動作データ(ポイントテーブル)
動作データ(ポイントテーブル)
動作データ No
(ポイントテーブル No)
データ設定値
動作データ No0
(RAM のみ)
*1
動作データ No1
(RAM および EEPROM)
*2
動作データ No2~127
(RAM および EEPROM)
*2
移動量(目標値) No0
回転速度 No0
加減速時定数 No0
移動量モード No0
移動量(目標値) No1
回転速度 No1
加減速時定数 No1
移動量モード No1
移動量(目標値)No2~127
回転速度 No2~127
加減速時定数 No2~127
移動量モード No2~127
本体
表示パネル
サーボパラメータ設定
ソフトウェア
PSF-800
(操作不可)
(操作不可)*4
(操作不可)
*4
(操作不可)
表示・編集・保存
動作データ設定
ソフトウェア
PSF-680CL *3
(操作不可)
設定値表示
設定値編集
ファイル保存
(拡張子 csv)
CC-Link 通信
*3
設定値表示(読出し)
設定値編集(書込み)
※詳細は下表
設定値表示(読出し)
設定値編集(書込み)
※詳細は下表
*1: 動作データ No0 は、RAM データのみです。EEPROM への保持機能はありません。
*2: 動作データ No1~127 は配列形式の同内容データにて、No1~127 までの 127 種類存在します。
*3: 動作データの設定内容は、本書の「13-4 通信プロファイル」または、別資料「PSF-680CL 操作マニュアル」
をご参照ください。
*4: HA-800C:Ver.3.00以降、PSF-800:Ver.2.00以降かつ17bitアブソリュートエンコーダ搭載のアクチュエー
タの場合、編集が可能です。
動作データ(ポイントテーブル)(詳細)
動作データ (ポイントテーブル)
動作データ表示(読出し)の
命令コード
CC-Link 通信
動作データ編集(書込み)の
命令コード *4
下位 16bit
0400
8300
上位 16bit
0500
8301
下位 16bit
0600
8302
上位 16bit
0700
8303
0800
0A00
8304
8305
下位 16bit
0401
8B01
上位 16bit
0501
8C01
下位 16bit
0601
8D01
上位 16bit
0701
8E01
0801
0A01
8F01
9001
下位 16bit
0402~047F
8B02~8B7F
上位 16bit
0502~057F
8C02~8C7F
下位 16bit
0602~067F
8D02~8D7F
上位 16bit
0702~077F
8E02~8E7F
0802~087F
0A02~0A7F
8F02~8F7F
9002~907F
データ設定値
移動量(目標値)No0
回転速度 No0
加減速時定数 No0
移動量モード No0
移動量(目標値)No1
付
回転速度 No1
加減速時定数 No1
移動量モード No1
移動量(目標値)No2~127
付
付録
回転速度 No2~127
加減速時定数 No2~127
移動量モード No2~127
動作データ No1~127 の
EEPROM への一括書込み
11
付
付
9100
*4: 動作データ編集(書込み)の命令コードを実行することで、RAM へのデータ書込みを実行します。動作デー
タ No1~127 に関して EEPROM への書込みが必要な場合は、RAM への書込み完了後 EEPROM への一括書
込み命令を実行してください。
付-21
10
付録-4 ドライバ交換手順
1
2
3
付録-4 ドライバ交換手順
2
メンテナンス等でドライバ HA-800C を交換する場合の手順を説明します。
手順
1
内容
確認部分・技術資料
品物の確認
交換前に使用中ドライバの銘板を確認します。
(交換前の品物) 型式(TYPE)と組合せアクチュエータ(ADJ.)を確認します。
ドライバ本体の側面部の銘
板
・型式(TYPE):
4
5
1
4
2-1 品物の確認
・組合せアクチュエータ(ADJ.):
2
3
品物の確認
交換後のドライバの銘板を確認します。
(交換後の品物) 型式(TYPE)と組合せアクチュエータ(ADJ.)が、交換前の品物と同一
であることを確認します。
5
※型式・組合せアクチュエータが異なる場合は交換できません。
6
3
スイッチ設定の
確認
交換前に使用中のドライバのスイッチ設定を確認します。
・ロータリスイッチ(SW1,2)
7
8
ドライバ本体の正面部、
LED 表示部のカバー内部
CC-Link 局番:上
下
・ロータリスイッチ(SW3)
CC-Link 通信速度:
・ディップスイッチ(SW4)
CC-Link 占有局数:左側
中央
右側
1-9 表示パネル各部の名称と
機能
5
パラメータの
保存 *1
動作データの
保存 *2
交換前に使用中ドライバ内部に設定(EEPROM に保持)されてい
るパラメータを保存します。
[調整パラメータ][システムパラメータ][ネットワークパラメータ]
7
8
OFF(下)
OFF(下)
※ディップスイッチ(SW4)の中央と右側に機能はありません。通常
は常に OFF(下)になっています。
4
6
9
通信ソフト PSF-800
・保存ファイル名(拡張子 psf)
:
10
※PSF-800 と通信する時は、ドライバ本体のロータリスイッチ
(SW1,2) CC-Link 局番設定を 70, 90 以外の設定としてから制御電
源と投入してください。
11
交換前に使用中ドライバ内部に設定(EEPROM に保持)されてい
る動作データ(ポイントテーブル)を保存します。
[動作データ No1~127]
・保存ファイル名(拡張子 csv)
:
※PSF-680CL と通信する時は、ドライバ本体のロータリスイッチ
(SW1,2) CC-Link 局番設定を 70 としてから制御電源を投入して
ください。
10-4-1 設定値の保存
通信ソフト PSF-800
10-10-7 ポイントテーブルの
保存とドライバへの書き込
み
通信ソフト PSF-680CL
別紙「PSF-680CL 操作マニュアル」
※本書の付録-4 に後述の注
意事項も合わせてご参照く
ださい。
付-22
付
付
付録
*1: パラメータ設定を変更せず当社出荷時の設定にてご使用頂いている、かつ、交換後のドライバもパラメータ
設定が当社出荷時の設定のままである場合、パラメータの保存・書込みは不要です。
使用条件が不明である場合は、パラメータの保存・書込みを実施してください。
*2: 動作データ No1~127 を使用しない場合、または、上位コントローラより CC-Link 通信を使用して動作デー
タを都度設定する場合は、動作データの保存・書込みは不要です。
使用条件が不明である場合は、動作データの保存・書込みを実施してください。
付
付録-4 ドライバ交換手順
1
手順
6
3
内容
(1)ドライバへの電源供給を OFF します。CHARGE ランプ消灯
を確認してから(または消灯するまで待ってから)
、交換前の
ドライバより、全ての配線を取り外します。
(2)交換前のドライバを制御盤より取り外します。
(3)交換後のドライバを制御盤へ取り付けます。
(4)交換後のドライバに、電源配線(TB2 または r,s,R,S,T)と
アース線を接続します。
(5)交換後のドライバに、パソコン通信ケーブル(CN3)を接続
します。
4
※(4)(5)アクチュエータ配線を接続しないことで、交換作業中に
誤って動作指令を入力しても、意図しないアクチュエータ動
作を予防できます。
品物の交換
2
5
7
制御電源の投入
交換後ドライバに対して制御電源(r,s)を供給します。ドライバ
が起動し LED 表示部(7セグメント LED)が点灯することを
確認します。
※このとき未配線やパラメータ未設定によりアラーム表示が出
ることがあります。交換作業に影響しませんので、以降の手
順を進めてください。
6
※制御電源(r,s)のみ供給することで、ドライバ主電源への充電
(CHARGE)がありません。手順 10 配線作業時に、CHARGE
ランプ消灯(放電)を待つ時間が短縮できます。
7
※主電源(R,S,T)との分離供給ができない場合、制御電源(r,s)と
主電源(R,S,T)を同時投入しても問題ありません。この場合は
感電防止のため、CHARGE ランプ消灯(放電)後に、手順
10 配線作業を行ってください。
8
8
動作データの
書込み *3
「5.動作データの保存」にて、保存した動作データを交換後の
ドライバに書込みます。
※PSF-680CL と通信する時は、ドライバ本体のロータリスイッ
チ(SW1,2) CC-Link 局番設定を 70 としてから制御電源を投
入してください。
9
付
付
確認部分・技術資料
パラメータの
書込み *3
10
配線の接続
11
スイッチ設定
「4.パラメータの保存」にて、保存したパラメータを交換後の
ドライバに書込みます。
[調整パラメータ][システムパラメータ][ネットワークパラメータ]
通信ソフト PSF-800
10-10-7 ポイントテーブルの保
存とドライバへの書き込み
通信ソフト PSF-680CL
別紙「PSF-680CL 操作マニュアル」
※ 本 書 の 付 録 -4 に 後 述 の
PSF-680CL 使用上の注意事項も
合わせてご参照ください。
通信ソフト PSF-800
10-4-4 保存済み設定ファイルをドライ
バへ書き込む
※PSF-800 と通信する時は、ドライバ本体のロータリスイッチ
(SW1,2) CC-Link 局番設定を 70, 90 以外の設定としてから制
御電源と投入してください。
交換後のドライバへの電源供給を OFF します。
CHARGE ランプ消灯を確認してから(または消灯するまで待
ってから)
、全ての配線を接続します。
「3.スイッチ設定の確認」にて、記録したスイッチ状態を交換
後のドライバに設定します。
ドライバ本体の正面部、
LED 表示部のカバー内部
・ロータリスイッチ(SW1,2) CC-Link 局番
・ロータリスイッチ(SW3) CC-Link 通信速度
・ディップスイッチ(SW4) CC-Link 占有局数
1-9 表示パネル
以上で、ドライバ交換作業は終了です。
付録
配線変更を伴う作業となります。感電事故等なき様ご注意ください。
付-23
意
11
付
*3: PSF-800 を用いて「5.動作データの保存」を行った場合、手順 8 と 9 は「手順 9、手順 8」の順で行ってく
ださい。
注
10
付
付録-4 ドライバ交換手順
1
2
3
4
5
6
7
8
1
●PSF-680CL 使用上の注意事項
ここでは PSF-680CL を使用して、動作データ(ポイントテーブル)No1~127 をコピーする場合
の概略手順と注意事項を記載します。 詳細は「PSF-680CL 操作マニュアル」をご参照ください。
2
1. 接続対象ドライバの設定
接続対象ドライバを PSF-680CL に設定する必要があります。
「PSF-680CL 操作マニュアル」の「1-3 接続対象の設定について」をご確認ください。
なお、新規インストール時は、HA-800C との接続設定になります。
3
4
2. 通信ポートの設定
パソコンの COM ポート番号を PSF-680CL に設定する必要があります。
「PSF-680CL 操作マニュアル」の「1-2 必要な環境について」をご確認ください。
5
3. 局番設定
PSF-680CL にてサーボドライバ HA-800C と通信をする場合は、サーボドライバ HA-800C の
CC-Link 局番設定を 70 にする必要があります。 局番設定ロータリスイッチを 70 に設定し、サー
ボドライバの制御電源を再投入することで CC-Link 局番設定が 70 になります。
6
7
※PSF-800 にてサーボドライバ HA-800C と通信する場合は、サーボドライバ HA-800C の CC-Link
局番設定を 70, 90 以外にする必要があります。 局番設定ロータリスイッチを 70, 90 以外に設定
し、サーボドライバの制御電源を再投入することで CC-Link 局番設定が 70, 90 以外になります。
4. 動作データの保存
(1)ソフトウェア PSF-680CL を起動します。
(2)メニューの[編集]-[受信]を選択します。
サーボドライバ HA-800C 内の動作データを、PSF-680CL が受信します。データ受信中は下記
の画面表示となります。このとき”movement data(127)”まで受信されることを確認してください。
8
9
10
11
※
※「1. 接続対象ドライバの設定」が HA-800C の時は、”movement data(127)”までのデータが順
番に転送されます。
※「1. 接続対象ドライバの設定」が HA-680CL の時は、”movement data(31)”までのデータが順
番に転送されます。
付
付
付録
付
付-24
付録-4 ドライバ交換手順
1
(3)受信されたデータが PSF-680CL 画面上に表示されます。
設定済みの動作データだけが数値表示されます。
未設定(未使用)の動作データは空白表示されます。
2
3
4
5
6
(4)メニューの[ファイル]-[名前を付けて保存]を選択します。
下記のような SAVE 画面が表示されます。ファイル名を入力して[保存]します。
サーボドライバ HA-800C から受信した動作データ(PSF-680CL の画面上に表示されている動
作データ)が、ファイル保存されます。
(拡張子 csv)
7
8
10
5. 動作データの書込み (保存済み動作データファイルを HA-800C へ書込む)
(1)ソフトウェア PSF-680CL を起動します。
(2)メニューの[ファイル]-[開く]を選択します。
下記のような OpenFile 画面が表示されます。保存済みの動作データファイルを選択して[開く]
します。
保存済み動作データファイルの内容が、PSF-680CL 画面上に表示されます。
11
付
付
付
付
付録
付-25
付録-4 ドライバ交換手順
1
1
2
2
3
3
4
5
6
7
4
(3)メニューの[編集]-[送信]を選択します。
下記のようなデータの送信画面が表示されます。
5
□「動作データを送信する」にチェックを付けます。
〇「全て送信する」を選択します。
□「パラメータを送信する」のチェックを外します。※1
[送信開始]をクリックして、動作データを送信します。PSF-680CL 画面上に表示されている
動作データを、サーボドライバ HA-800C へ送信します。
6
7
「動作データを送信する」
:チェックを付けます
「全て送信する」
:選択します
8
8
「パラメータを送信する」
:チェックを外します
9
「送信開始」をクリックし、動作データを送信します。
※1. ここでの「パラメータを送信する」のパラメータは、ネットワークパラメータを意味
しています。ネットワークパラメータは PSF-800 を使用してコピーします。このため、
PSF-680CL からのデータの送信時はチェックを外し送信を無効とします。
誤って送信をした場合でも、PSF-800 にて保存済みパラメータを書き込むことでネット
ワークパラメータは正しい値に復元されます。
データ送信中は下記の画面表示となります。
Data(1)から(127)までが送信されます。127 個の動作データ送信後、EEPROM 書込みが実行さ
れます。(EEPROM 書込みには 20 秒かかります。
) 書込みが完了するとデータの送信画面が
消えます。
10
11
付
付
データ送信中
データ送信中
付録
付
EEPROM 書込み実行中
付-26
付録-5 アクチュエータ・モータ交換手順
1
2
3
4
5
6
付録-5 アクチュエータ・モータ交換手順
メンテナンス等でアクチュエータ・モータを交換する場合の一般的な手順の一例を説明します。
〇インクリメンタルエンコーダ付きアクチュエータ①
・HA-800C 内蔵機能の原点復帰動作を行わないアプリケーションの場合
手順
1
内容
品物の確認
交換前に使用中のアクチュエータの銘板を確認します。
(交換前の品物)
2
品物の確認
交換後のアクチュエータの銘板を確認します。
(交換後の品物) 交換前の品物と同一型番であることを確認します。
※型式が異なる場合は交換できません。
3
品物の交換
確認部分・技術資料
アクチュエータ本体の銘板
(1) 交換前のアクチュエータからすべての配線を取り外し
ます。
(2) 交換前のアクチュエータを機械から取り外します。
7
8
(3) 交換後のアクチュエータを機械に取り付けます。
(4) 交換後のドライバにモータ配線、エンコーダ配線を接続
します。
4
動作の確認
(1) ドライバに電源を投入します。
(2) エラーが発生していない事を確認します。
(3) PSF-800 の JOG 運転にて、交換前と回転方向等同じ事
を確認してください。
(4) 必要に応じてチューニングを行ってください。
※上位コントローラにて、アクチュエータ・モータの Z 相信号を利用した位置管理をしている場合、
上位コントローラでの機械系座標とアクチュエータ・モータの Z 相信号を整合する処理が必要です。
10
11
付
付
注
付
付録
付-27
意
アクチュエータ・モータの交換に際しては、装置・機械の座標設定など調整が必要な
場合があります。装置本体や上位コントローラを含めたシステムとしての仕様に沿っ
て交換をしてください。
本書で説明する交換手順はあくまでも一般的な交換手順の一例です。
付
付録-5 アクチュエータ・モータ交換手順
1
・HA-800C 内蔵機能の原点復帰動作を行うアプリケーションの場合
手順
2
1
〇インクリメンタルエンコーダ付きアクチュエータ②
~4
5
3
内容
確認部分・技術資料
インクリメンタルエンコーダ付きアクチュエータ①
・HA-800C 内蔵機能の原点復帰動作を行わないアプリケーションの場合 と同様
機 械 原 点 の 調 (1) 交換前のアクチュエータで使用していた仮想原点設定 ネットワークパラメータ
整
を 0 にクリアして電源の再投入を行ってください。
(1) 交換前の仮想原点設定
(この時、念のため設定値を控えておいてください)
:
(2) 通常使用する原点復帰動作を行い、PSF-800 にて帰還パ
ルスが 0 にクリアされたことを確認してください。
4
(4) 機械原点位置に停止している際の帰還パルス数を控え
てください。(必ず(2)の動作から電源を切らずに行って
下さい。)
6
(4) 交換後の機械原点位置で
の帰還パルス数
:
(5) ネットワークパラメータ 07:仮想原点に、(4)の値を入
力してドライバに書き込みしてください。
(CC-Link 命令コードでの書き込みも可能)
7
5
6
7
(6) 電源再投入後、原点復帰動作を行うと(3)で決められた機
械原点位置で停止し、帰還パルスが 0 になります。
8
3
4
(3) 装置の機械原点位置に JOG 動作等で動作部を移動させ
てください。(必ず(2)の動作から電源を切らずに行って
下さい。)
5
2
8
(例)インクリメンタルエンコーダを使用して、原点センサ通過後最初の Z 相を原点とするような原
点復帰方法の場合(5-(4)での帰還パルス数が 3,000 の場合の例)
9
10
11
付
付
注
意
アクチュエータ・モータの交換に際しては、装置・機械の座標設定など調整が必要な
場合があります。装置本体や上位コントローラを含めたシステムとしての仕様に沿っ
て交換をしてください。
本書で説明する交換手順はあくまでも一般的な交換手順の一例です。
付-28
付録
付
付録-5 アクチュエータ・モータ交換手順
1
2
3
〇アブソリュートエンコーダ付きアクチュエータ
・HA-800C 内蔵機能の原点復帰動作を行うアプリケーションの場合
(エンコーダの 0 位置を原点として使用する場合)
手順
~3
内容
インクリメンタルエンコーダ付きアクチュエータ①
・HA-800C 内蔵機能の原点復帰動作を行わないアプリケーションの場合
と同様
4
動作の確認
(1) ドライバに電源を投入します。
(2) 初回電源投入時にはパネル操作にて多回転クリア操作
(P9-9参照)を行ってください。
(3) 電源再投入後、PSF-800 の JOG 運転にて、交換前と回
転方向等同じ事を確認してください。
(4) 必要に応じてチューニングを行ってください。
多回転クリア操作
HA-800C マニュアル
P9-9
5
機械原点の調
整
(P4-8 、 P4-16
参照)
(1) 装置の機械原点位置に JOG 動作等で動作部を移動させ
てください。
(2) パネル操作にて多回転クリア動作を行ってください。
(3) 電源を再投入してください。
(4) 動作部が機械原点位置にある事を確認し、PSF-800 にて
表示される帰還パルス数を控えてください。
重力等で機械原点から動いてしまった場合は再度 JOG 操
作等で動作部を機械原点位置に移動させてから帰還パル
ス数を控えてください。
HA-800C マニュアル
P4-8、P4-16
4
5
確認部分・技術資料
6
7
(4) 交換後の機械原点位置で
の帰還パルス数
:
(5) ネットワークパラメータ 07:仮想原点に、(4)の値を入
力しドライバに書き込みを行ってください。
(CC-Link 命令コードでの書き込みも可能)
(6) 電源再投入後、設定した機械原点の位置が帰還パルス数
0 の位置となります。
8
(例)17bit アブソリュートエンコーダ原点設定関連図(5-(4)での帰還パルス数が 50,000 の場合の例)
10
11
付
付
付
付
付録
注
付-29
意
アクチュエータ・モータの交換に際しては、装置・機械の座標設定など調整が必要な
場合があります。装置本体や上位コントローラを含めたシステムとしての仕様に沿っ
て交換をしてください。
本書で説明する交換手順はあくまでも一般的な交換手順の一例です。
付録-6 SHA-CG(-S)使用時の注意事項
1
2
3
4
5
6
7
8
1
付録-6 SHA-CG(-S)使用時の注意事項
2
SHA-CG(-S)を使用する場合の注意事項について説明します。
SHA-CG シリーズを使用する場合、必ず「17bit アブソリュートエンコーダ」
(P4-4)
を参照の上、必要な設定を確認してください。
SHA-CG(-S)では、従来の SHA シリーズ(SHA-SG/HP)に対して以下の 2 つの特徴を持っています。
1.出力軸 1 回転アブソリュート仕様
2.出力軸分割機能
1.出力軸 1 回転アブソリュート仕様
SHA-CG 出力軸 1 回転アブソリュート仕様(SHA-CG-S)は、インデックステーブル等一方向
にのみ動かす機械を想定しています。一方向にのみ回転し続ける場合、アブソリュートエンコー
ダが検出可能な多回転検出数をいつかは超えてしまうため、位置情報を正確に管理することがで
きなくなります。
そこで、出力軸が 1 回転するごとに多回転累積カウンタを 0 にクリアし、出力軸 1 回転アブソ
リュート機能を実現することで、一方向にのみ回転し続ける場合の位置情報を正確に管理してい
ます。
なお、本機能を用いる場合には「SP66:アブソリュートエンコーダ機能設定」を 0 としてご使
用ください。
また、SHA-CG 出力軸 1 回転仕様では、CC-Link 通信のモニタコード 0019h~001Bh:ABS 位
置読み出しの、出力の範囲は「0~217×減速比-1」パルスとなります。
2.出力軸分割機能
SHA-CG シリーズでは、インデックステーブル等での割り出し動作など、出力軸の角度単位で
の動作を行いたい場合の設定を容易にするために、「SP67:出力軸分割機能設定」にてアクチュ
エータへの動作指令を角度単位で設定することができ、上位装置での設定を簡略化できます。
「SP67:出力軸分割機能設定」では、SP67 の設定及び適用アクチュエータから設定に対応す
る電子ギヤ値を自動的に設定します。
SP67=0:「NP00:アクチュエータ分解能」に従う
SP67=1:出力軸 1 回転 3.6 万分割(分解能 0.01deg 相当)
SP67=2:出力軸 1 回転 36 万分割(分解能 0.001deg 相当)
SP67=3:出力軸 1 回転 360 万分割(分解能 0.0001deg 相当)
3
4
5
6
7
8
9
10
11
付
付
なお、下記の CC-Link 通信のモニタ内容は、適用アクチュエータと「SP67:出力軸分割機能設
定」
、「SP50:指令極性」の設定によって出力範囲、極性が異なりますので、ご注意ください。
付録
付
付-30
付録-6 SHA-CG(-S)使用時の注意事項
1
2
3
4
5
6
7
8
「SP67:出力軸分割機能設定」は動作指令の分解能を設定する機能であり、出力軸
での位置決め精度を保証するものではありません。出力軸での位置決め精度の詳細
に関しては、
「AC サーボアクチュエータ SHA シリーズ技術資料」を参照してくだ
さい。
「SP67:出力軸分割機能設定」を変更する場合には、必ず、「SP67:出力軸分割
機能設定」(P8-8)の影響範囲を参照の上、ご使用ください。
出力軸分割機能有効時(SHA-CG シリーズで SP67=0 以外)では、移動量の設定と共
に、速度も出力軸回転速度も角度単位となりますので、ポイントテーブルデータ設
定、原点復帰速度設定には注意してください。
上位装置での動作シーケンスを設定後、
「SP67:出力軸分割機能設定」を変更した
場合、変更前の動作とは移動量、速度、加減速時間が大きく変化しますので、動作
を行う前に必ず動作データ(ポイントテーブル)の設定を確認/修正して下さい。
出力軸分割機能の設定に応じて各種速度下限値は下記の通りとなります。
SP67=0:125 pls/sec
SP67=1:1 ×0.01deg/sec
SP67=2:1 ×0.001deg/sec
SP67=3:1 ×0.0001deg/sec
出力軸分割機能設定時電子ギヤ値
SP67=1
3.6 万分割
減速比
分子
分母
分子/分母
50
8192
45
182.0
80
65536
225
291.3
100
16384
45
364.1
120
32768
75
436.9
160
131072
225
582.5
分子
4096
32768
8192
16384
65536
SP67=2
36 万分割
分母
分子/分母
225
18.2
1125
29.1
225
36.4
375
43.7
1125
58.3
分子
2048
16384
4096
8192
32768
SP67=3
360 万分割
分母
分子/分母
1125
1.82
5625
2.91
1125
3.64
1875
4.37
5625
5.83
10
11
付
付
付
付
付録
付-31
付録-6 SHA-CG(-S)使用時の注意事項
1
1
組合せ動作例
例 1:SHA-CG(-S)、出力軸分割機能未使用時(SP67=0)
例 2:SHA-CG(-S)、出力軸分割機能使用時(SP67=1)
2
例 1:SHA-CG(-S)、出力軸分割機能未使用時(SP67=0)
3
正転動作指令入力時(指令パルス数:819200)
4
2
SHA25A50CG(出力軸分解能:6553600[pls/r])、「SP67:出力軸分割設定」が 0 の場合
SP50=0(初期値)
指令パルスがカウントアップで
CW 回転
CW 方向へ 45°動作
3
SP50=1
指令パルスがカウントアップで
CCW 回転
CCW 方向へ 45°動作
0°/360°
4
0°/360°
5
6
7
8
5
270°
90°
270°
180°
6
90°
7
180°
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
モニタデータ:819200
CW 回転でカウントアップ
モニタデータ:819200
CCW 回転でカウントアップ
8
9
逆転動作指令入力時(指令パルス数:819200)
SP50=0(初期値)
指令パルスがカウントダウンで
CCW 回転
CCW 方向へ 45°動作
SP50=1
指令パルスがカウントダウンで
CW 回転
CW 方向へ 45°動作
0°/360°
10
0°/360°
11
270°
90°
180°
270°
付
90°
付
180°
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
モニタデータ:5734400
CW 回転でカウントアップ
モニタデータ:5734400
CCW 回転でカウントアップ
付録
付
付-32
付録-6 SHA-CG(-S)使用時の注意事項
1
例 2:SHA-CG(-S)、出力軸分割機能使用時(SP67=1)
2
正転動作指令入力時(指令パルス数:4500)
3
SHA25A50CG(出力軸分解能:6553600[pls/r])、「SP67:出力軸分割設定」が 1 の場合
SP50=0(初期値)
指令パルスがカウントアップで
CW 回転
CW 方向へ 45°動作
SP50=1
指令パルスがカウントアップで
CCW 回転
CCW 方向へ 45°動作
0°/360°
0°/360°
4
5
6
7
8
270°
90°
270°
180°
90°
180°
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
モニタデータ:4500
CW 回転でカウントアップ
モニタデータ:4500
CCW 回転でカウントアップ
逆転動作指令入力時(指令パルス数:4500)
SP50=0(初期値)
指令パルスがカウントダウンで
CCW 回転
CCW 方向へ 45°動作
SP50=1
指令パルスがカウントダウンで
CW 回転
CW 方向へ 45°動作
0°/360°
0°/360°
10
270°
90°
180°
付
270°
90°
180°
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
アクチュエータ 1 回転内指令パルス
アクチュエータ 1 回転内位置
モニタデータ:31500
CW 回転でカウントアップ
モニタデータ:31500
CCW 回転でカウントアップ
付
付録
付-33
11
付
付
付録-6 SHA-CG(-S)使用時の注意事項
1
数値例:出力軸分解能=6553600[pls/r]の場合(「NP00:アクチュエータ分解能」=6553600(初期値))
0019h
4
5
)
)
)
SHA-CG-S
)
SHA-CG-S
以外
-6553601
-6553601
-6553601
6553599
6553599
-6553601
6553599
-6553600
-6553600
-6553600
0
0
-6553600
0
7
-6553599
-6553599
-6553599
1
1
-6553599
1
-2
-2
-2
6553598
6553598
-2
6553598
8
-1
-1
-1
6553599
6553599
-1
6553599
0
0
0
0
0
0
0
1
1
1
1
1
1
1
2
2
2
2
2
2
2
・・・
「SP67:出力軸
分割機能設定」
=0*1
・・・
6553599
6553599
6553599
6553599
6553599
6553599
6553599
6553600
6553600
6553600
0
0
6553600
0
6553601
6553601
6553601
1
1
6553601
1
-36001
-6553783
-36001
35999
35999
-6553783
6553417
-36000
-6553600
-36000
0
0
-6553600
0
-35999
-6553418
-35999
1
1
-6553418
182
-2
-365
-2
35998
35998
-365
6553235
-1
-183
-1
35999
35999
-183
6553417
0
0
0
0
0
0
0
1
182
1
1
1
182
182
2
364
2
2
2
364
364
35999
6553417
35999
35999
35999
6553417
6553417
36000
6553600
36000
0
0
6553600
0
・・・
「SP67:出力軸
分割機能設定」
=1*2
2
3
)
6
アクチュエー
タ
001Ch
位置 帰(還パルス単位 )
ABS
5
0010h
回
1 転内位置 指(令パルス単位
内容(単位)
001Eh
回
1 転内指令 指(令パルス単位
4
000Ah
帰還パルス累積 指(令パルス単位
3
0005h
帰還パルス累積 帰(還パルス単位
モニタ
コード No
指令パルス累積 指(令パルス単位
2
1
モニタ数値例
6
7
8
9
10
11
付
付
・・・
付-34
付
付録
36001
6553782
36001
1
1
6553782
182
*1:「SP67:出力軸分割機能設定」=0、かつ、電子ギヤ比(SP44/SP45)が「1」の場合の数値例です。
*2:「SP67:出力軸分割機能設定」=2,3、または、電子ギヤ比(SP44/SP45)が「1」以外の場合も上記例と同様に
指令パルス単位と帰還パルス単位の数値の意味が異なるものとなります。「出力軸分解能:6553600」のアク
チュエータの場合、「帰還パルス単位:6553600」が SP67=2 では「指令パルス単位:360000」に、SP67=3
では「指令パルス単位:3600000」に相当します。電子ギヤ比(SP44/SP45)が「1」以外の場合は、「帰還パ
ルス単位:6553600」が「指令パルス単位:アクチュエータ分解能(NP00)」に相当します。
付録-6 SHA-CG(-S)使用時の注意事項
1
2
3
4
5
「0010h:アクチュエータ 1 回転内指令パルス」
、「001Bh:アクチュエータ 1 回転
内位置」の基準座標系は、
「SP67:出力軸分割機能設定」に応じて、以下のように
なります。
SP67=0:NP00 pls/r
SP67=1:36000 pls/r
SP67=2:360000 pls/r
SP67=3:3600000 pls/r
インクリメンタルエンコーダ搭載アクチュエータで、電子ギヤ比「SP44/SP45」を
「1/1」以外に設定した場合には、「NP00:アクチュエータ分解能」を以下のように
設定してください。
NP00 = 出力軸分解能(NP00 初期値) ÷ 電子ギヤ比(SP44/45)
6
7
8
10
11
付
付
付
付
付録
付-35
付録-7 制御ブロック図
1
2
3
4
5
付録-7 制御ブロック図
7
8
2
指令パルス数
d07,d08[pls]
指令パルス数
PSF-800[pls]
出力トルクモニタ
d03[%]
指令速度
PSF-800[pls/s]
速度変換
1回転内指令
0010h[pls]
1回転変換
トルク
PSF-800[%]
指令パルス累積
0005h[pls]
動作命令
トルク入力係数
SP53
フィードフォワード
制御
AJ03,AJ20,AJ21,
AJ22,AJ23,SP69
指令演算
電子ギア機能設
定SP68
6
1
指令極性*1
SP50
出力軸分割機能
選択*3 SP67
電子ギア
SP44/SP45
+
-
位置制御
AJ00
指令極性*1
SP50
+
+
+
-
速度制御
AJ01
AJ02
+
電流制御
+
偏差パルス数
d01,d02[pls]
電流モニタ*2
CN9-CUR-MON[V]
出力トルクモニタ
0012h[%]
モータ
モータ回転速度
PSF-800[r/min]
モータ速度
0016h[pls/s]
8
速度変換
速度入力係数
SP51
ABS位置読み出し
0019h[pls]
指令極性*1
SP50
9
指令極性*1
SP50
+
帰還パルス数
d05,d06[pls]
エンコーダ出力
CN2-13~19[pls]
5
7
指令極性*1
SP50
モータ回転速度
d00[r/min]
速度モニタ*2
CN9-SPD-MON[V]
4
6
エンコ
ーダ
偏差パルス数
PSF-800[pls]
偏差パルス
000Eh[pls]
3
エンコーダモニタ
出力パルス数
SP62
指令極性*1
SP50
10
帰還パルス数
PSF-800[pls]
指令極性*1
SP50
11
仮想原点
NP07
帰還パルス累積
000Ah[pls]
出力軸分割機能
選択*3SP67
帰還パルス累積
001Eh[pls]
1回転内位置
001Ch[pls]
付
逆電子ギア
SP45/SP44
1回転変換
*1:「SP50:指令極性」は、「0」設定時は「+1」を、「1」設定時は「-1」を指令パルスに掛けることに相当し
ます。
*2:「速度モニタ」および「電流モニタ」のモニタ電圧から、モータ回転速度[r/min]、電流[A]への換算の詳細に
ついては、「モニタ出力」(P5-9)を参照してください。
*3:「SP67:出力軸分割機能設定」の設定に応じて、エンコーダパルス単位を指令パルス単位へ変換しています。
付
付録
付
付-36
付録-7 制御ブロック図
1
2
3
4
5
6
7
8
10
11
付
付
付
付
付録
付-37
索引
B
え
BUSY エラー .................................................... 11-11
エンコーダ組合せ ................................................ 4-2
エンコーダ受信異常 ...........................................11-7
エンコーダ断線 ..................................................11-7
エンコーダとの接続 .......................................... 2-18
エンコーダモニタ出力パルス数 .......................... 8-6
C
CN9-3 出力信号設定 ............................................ 8-2
D
DB 有効/無効設定.............................................. 8-5
F
FPGA コンフィグエラー ................................. 11-10
FPGA 設定エラー ............................................ 11-10
I
お
オートチューニング ................................. 9-10, 10-8
オートチューニング移動量 ............................... 9-12
オートチューニングレベル選択 ........................ 9-13
か
PSF-800 ............................................................ 10-1
PSF-800 でのポイントテーブル編集............... 10-27
外形寸法 ............................................................ 1-12
回生抵抗 ................................................................. 7
回生抵抗過熱 ......................................................11-5
回生抵抗選択 ....................................................... 8-7
回生電力 ....................................................... 7-2, 7-7
過回生.................................................................11-6
角度補正有効/無効設定 ..................................... 8-5
加減速時定数 ..................................................... 7-15
過速度.................................................................11-3
過電圧.................................................................11-5
加熱エラー ....................................................... 11-11
過負荷.................................................................11-3
過負荷状態 .......................................................11-14
過負荷率表示 ................................................ 7-1, 7-4
環境 ............................................................ 2-2, 10-1
S
き
SHA-CG(-S)使用時の注意事項 ............................. 31
UVW 異常 .......................................................... 11-8
帰還パルス数表示 ......................................... 7-1, 7-5
逆転禁止入力中 ................................................11-15
局番 ................................................................. 13-17
許容位置偏差 ....................................................... 8-3
あ
け
アース .................................................................. 2-8
アクチュエータ・モータ交換手順 ........................ 27
アブソリュートエンコーダ機能設定 ................... 8-8
アラーム .......................................................... 10-25
アラームモード ................................................... 7-8
アラーム履歴クリア .......................................... 7-10
ゲイン調整 ........................................................ 3-14
ケーブルサイズ ................................................... 2-5
欠相 ....................................................................11-6
原点セット ........................................ 4-8, 4-16, 4-26
原点復帰動作について....................................... 13-9
IO モニタ ......................................................... 10-22
IPM エラー ........................................................ 11-4
J
JOG 加減速時定数設定........................................ 9-5
JOG 速度設定 ...................................................... 9-4
JOG 動作 ............................................................. 9-6
M
MEMORY エラー ............................................. 11-10
P
U
い
位置決め完了範囲 .............................................. 7-13
位置決め時自動ゲイン有効/無効設定 ................ 8-6
位置決め時自動ゲイン ....................................... 7-17
位置ループゲイン .............................................. 7-12
1 回転データ異常 ............................................. 11-11
移動量モード設定 .............................................. 13-6
こ
構成図.................................................................. 1-3
さ
サーボ ON 時偏差クリア設定 .............................. 8-3
サーボから読み込み ........................................ 10-31
サーボに書き込む ............................................ 10-31
最大接続台数 ................................................... 13-18
索引
し
システムダウン .......................................11-8, 11-10
システムパラメータモード.................................. 8-1
終端抵抗 .......................................................... 13-15
主回路電圧低下 .......................................11-6, 11-14
主回路電源電圧 ................................................... 7-1
出荷時設定.............................................................. 1
出力軸分割機能設定 ............................................ 8-8
出力信号操作 ............................................ 9-3, 10-21
出力信号倫理設定 ................................................ 8-7
出力トルクモニタ ................................................ 7-1
ドライバ仕様 ....................................................... 1-7
状態表示 .............................................................. 7-1
状態表示設定 ....................................................... 8-5
指令パルス数表示 ......................................... 7-1, 7-5
信号モニタ......................................................... 5-10
せ
制御電源低下 ..................................................... 11-6
制御ブロック図 .................................................... 37
制御モード........................................................... 7-2
正転/逆転禁止時動作 ................................ 8-7, 8-10
正転禁止入力中 ............................................... 11-15
接続アクチュエータ違い ................................. 11-15
設定値の保存・比較・コピー .......................... 10-12
設定方法 .......................................................... 13-17
零速度判定値 ..................................................... 7-14
そ
速度到達判定値 ................................................. 7-14
速度入力係数設定 ................................................ 8-4
速度モニタ........................................................... 5-9
速度モニタオフセット ....................................... 7-15
速度ループゲイン .............................................. 7-12
速度ループ積分補償 .......................................... 7-13
た
ダイナミックブレーキ過熱................................ 11-7
多回転オーバーフロー ....................................... 11-8
多回転クリア ....................................................... 9-9
多回転データ異常 ............................................. 11-11
多回転データエラー .......................................... 11-8
単位設定 .......................................................... 10-29
ち
中継ケーブルの組み合わせ.................................. 1-6
調整モード......................................................... 7-11
つ
通信エラー........................................................ 11-11
通信仕様 ............................................................ 13-1
通信プロファイル ............................................ 13-19
通電時間 .............................................................. 7-2
て
定格 ..................................................................... 1-7
定期交換部品 ..................................................... 3-22
適用アクチュエータコード .......................... 7-1, 7-6
テスト運転 ...................................................... 10-19
電子ギヤ設定 ....................................................... 8-2
電流モニタ .......................................................... 5-9
電流モニタオフセット....................................... 7-16
と
ドライバ型式 ....................................................... 1-5
ドライバ交換手順 ................................................. 22
ドライバ保持データ一覧 ...................................... 18
トルク制限値 ..................................................... 7-14
トルク定数補正係数 .......................................... 7-17
トルク到達判定値 .............................................. 7-14
トルク入力係数設定 ............................................ 8-5
な
内部機能ブロック図 ............................................ 1-2
に
入出力信号モニタ ................................................ 9-2
入力信号倫理設定 ................................................ 8-6
ね
ネットワークパラメータ一覧 ...........................13-11
の
ノイズ................................................................ 2-14
は
配線方法 .......................................................... 13-15
波形モニタ ...................................................... 10-23
発生アラームワーニング表示 .............................. 7-9
バッテリ ............................................................ 3-22
バッテリ交換方法 .............................................. 3-23
バッテリ電圧低下 .............................................11-14
ばね定数補正係数 .............................................. 7-17
パネル表示 .......................................................... 6-3
パラメータ初期化 ................................................ 9-8
パラメータ設定 ............................................... 10-10
ひ
非常停止 .............................................................11-2
表示パネル ........................................................ 1-14
ふ
ファイル読み込み ............................................ 10-32
フィードフォワードゲイン ............................... 7-13
フィードフォワードフィルタ ............................ 7-16
フィードフォワード制御機能設定 ......................8-11
負荷慣性モーメント比....................................... 7-16
プロセッサ異常 ................................................11-10
へ
別売品......................................................... 1-5, 12-1
偏差過大 .............................................................11-9
偏差パルス数表示 ......................................... 7-1, 7-3
索引
ほ
も
ポイントテーブルデータ設定範囲 ..................... 13-5
ポイントテーブル動作 ..................................... 10-34
ポイントテーブルの保存とドライバへの書き込み
..................................................................... 10-33
ポイントテーブル編集・動作 .......................... 10-26
モータ................................................................ 2-17
モータ回転速度表示 ............................................ 7-1
モニタグランド ................................................. 5-10
め
メモリ異常....................................................... 11-10
れ
冷却ファン停止 ................................................11-14
索引
保証期間と保証範囲
HA-800C シリーズの保証期間および保証範囲は、次の通りとさせていただ
きます。
■保証期間
技術資料および取扱説明書に記載された、各項を遵守してご使用頂く事を条件に、納入後 1 年
間、または当該品につき運転時間 2,000 時間のどちらか早い到達時期とさせていただきます。
■保証範囲
上記保証期間内において、弊社の製造上の不具合により故障した場合は、当該品の修理、また
は交換を弊社側の責任において行います。
ただし、次に該当する場合は、保証対象範囲から除外させていただきます。
①お客様の不適当な取り扱いまたは使用による場合
②弊社以外による改造、または修理による場合
③故障の原因が当該品以外の事由による場合
④その他、天災など弊社側に責任がない場合
なお、ここでいう保証とは、当該品についての保証を意味するものです。
当該品の故障により誘発される他の損害、実機よりの取り外しおよび取り付けに関する工数、
費用等については弊社負担範囲外とさせていただきます。
■緊急時の修理・技術お問い合わせ窓口【緊急の修理依頼および技術的な相談窓口です】
T E L : CS部 0263 (83) 6812
受付時間
: 月~金曜日 9:00~12:00 13:00~17:00(土曜、日曜、祝日、弊社指定休日を除く)
ISO14001(穂高工場)/ISO9001 認証取得(TÜV SÜD Management Service GmbH)
本技術資料に記載されている仕様・寸法などは予告なく変更することがあります。
本技術資料は、2014 年 11 月現在のものです。
http://www.hds.co.jp/
本
社/東京都品川区南大井 6-25-3 ビリーヴ大森 7F
〒140-0013 TEL.03(5471)7800㈹ FAX.03(5471)7811
東京営業所/東京都品川区南大井 6-25-3 ビリーヴ大森 7F
〒140-0013 TEL.03(5471)7830㈹ FAX.03(5471)7836
北関東営業所/埼玉県さいたま市大宮区桜木町 4-263 Y.S.T.ビル 3F
〒330-0854 TEL.048(647)8891㈹ FAX.048(647)8893
甲信営業所/長野県安曇野市穂高牧 1856-1
〒399-8305 TEL.0263(83)6910㈹ FAX.0263(83)6911
中部営業所/愛知県名古屋市名東区本郷 2-173-4 名古屋インタービル 6F
〒465-0024 TEL.052(773)7451㈹ FAX.052(773)7462
関西営業所/大阪府大阪市淀川区西中島 7-4-17 新大阪上野東洋ビル 3F
〒532-0011 TEL.06(6885)5720㈹ FAX.06(6885)5725
九州営業所/福岡県福岡市博多区博多駅前 1-15-20NOF 博多駅前ビル 7F
〒812-0011 TEL.092(451)7208㈹ FAX.092(481)2493
海外営業本部/長野県安曇野市穂高牧 1856-1
〒399-8305 TEL.0263(83)6935㈹ FAX.0263(83)6901
穂高工場/長野県安曇野市穂高牧 1856-1
〒399-8305 TEL.0263(83)6800㈹ FAX.0263(83)6901
「ハーモニックドライブ®」の学術的・一般名称は「波動歯車装置」であり、「ハーモニックドライブ®」は当社が製造販売する製品にのみ使用できる登録商標です。
№1411-7R-THA800C
© Copyright 2026 Paperzz