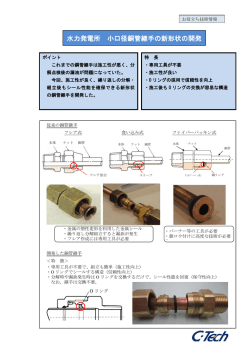
目次 1. はじめに 1.1. 2010 年度プロジェクトリーダーから 1.2. 学生フォーミュラ大会(Formula SAE)の設立に関して 1.3. OUFP の設立に関して 2. 2010 年度の OUFP 2.1. 組織 2.2. メンバー 2.3. 開発仕様 2.4. 活動日程 3. OUFP-06 車両説明 3.1. コンセプト「加速・旋回性能の向上」 3.2. パッケージング 3.3. 各パーツ説明 4. 第 8 回大会全日本学生フォーミュラ大会について 4.1. 第 8 回大会結果 4.2. 各種目別考察 4.3. エンジントラブルの報告 4.3.1. 分析 4.3.2. エンジンのこれからの方針 5. 2010 年度チーム反省 5.1. テクニカルディレクター 5.2. 新人教育 5.3. プロジェクトマネージャー 5.4. すべてを終えて 6. 2010 年度収支決算 7. 2011 年度チームに関して 7.1. チーム運営 7.2. マシンコンセプト 7.3. 2011 年度予算計画 8. 2010 年度スポンサー様一覧 1 1. はじめに 1.1. 2010 年度プロジェクトリーダーから 日頃より OUFP の活動に,多大なご理解を頂いており感謝しております. OUFP2010 年度プロジェクトは,2009 年 10 月のチーム結成から 2010 年 9 月に開催さ れた第 8 回大会に参加し,活動に区切りをつけることとなりました. この一年間,多くの企業・個人の方々から数々のご支援を頂き,そのお陰をもちまして 私どもはこの活動に全精力を注ぎ込むことができました. 本冊子は,私どもが一年間活動いたしました記録を綴ったもので,この冊子をご覧頂く ことで,OUFP の活動にいっそうのご理解を頂ければと思っております. 最後に,一年にわたるご支援に改めて御礼申し上げます. 岡山大学 フォーミュラプロジェクト 2010 年度プロジェクトリーダー 板野 光司 1.2. 学生フォーミュラ大会(Formula SAE)の設立に関して 学生フォーミュラ大会は 1981 年に,教室の中では優秀なエンジニアが育たないことにいち 早く気づいた米国が『ものづくりによる実践的な学生教育プログラム』として Formula SAE (SAE International 主催)を開催したことが始まり,現在ではアメリカをはじめ,イギリス (Formula Student 1998~),オーストラリア(Formula SAE-A 2000~)で同様の大会が開催さ れています.日本では全国的なものづくりコンテストとして,鳥人間コンテスト,ソーラー カー大会,ロボットコンテストが開催されていましたが,自動車技術分野においてはそのよ うな大会は存在しませんでした.その間アメリカでは Formula SAE というものづくりコン テストの歴史を積み重ねていました.このような経緯を経て,日本では 2003 年より自動車 技術会主催のもと「全日本学生フォーミュラ大会―ものづくり・デザインコンペティション ―」として米国の Formula SAE と同様のルールに日本独自のローカルルールを加え,大会 が開催されています. 日本大会では 2009 年度で第 7 回目の開催となり,過去 6 回の開催において当初 17 チーム という参加校であったのに対し,第 2 回大会 34 チーム,第 3 回大会 45 チーム,第 4 回大会 51 チーム,第 5 回大会 62 チームエントリーし,参加チームは年々増加しています.第 6 回 大会からは書類選考が導入され大会参加上限 65 チームとなり,海外からのエントリーも含め て第 6 回大会 77 チーム,第 7 回大会 80 チーム,第 8 会大会は 85 チームのエントリーとな りました. 学生が主体となって大会出場用の車体の開発・製作することにより,ものづくりの本質や そのプロセスを学び,ものづくりの厳しさ・おもしろさ・喜びを実感するだけでなく,車体 のマーケティング,企画・設計・製作,コスト管理等のものづくりにおける実践力を向上さ 2 せることが可能なため,学生に対しては自己能力向上の場として,企業に対しては将来を担 う有能な人材を発掘する場としても効果的です. 1.3. OUFP の設立に関して 岡山大学フォーミュラプロジェクト(以下 OUFP)は,2004 年 10 月に,1 年目のプロジェク トリーダーである福原の提案のもと,機械工学科有志が集まり工学部機械工学科のバックア ップを受け創設されました.当時のメンバーは 2 回生 6 名,1 回生 3 名の 9 名であり, 「車が 好き」や,「ものづくりが好き」な学生ばかりでした. 2010 年度チームメンバーの多くも機械工学科に所属していますが,工学部システム工学科, 電気電子工学科所属のメンバーもおり,所属学科にとらわれない活動を行っています. 2. 2010 年度の OUFP 2.1. 組織 2010 年度チームではプロジェクトマネージャー,テクニカルディレクター,新人教育を設 け,それぞれスケジュール,マシンの完成度,新入生の早期育成といったことにも注力しま した. 加えて,2010 年度プロジェクトでは,それまではプロジェクトリーダーが負担していた仕 事の一部を,班リーダーに任せることとしました.そうすることによってチーム全体で話し 合って決めていたことを班ごとに落とし込むことにより少人数で話し合うことができ,プロ ジェクト全体の作業効率が向上しました. 2.2. メンバー 以下に 2010 年度のメンバーを紹介する.4 回生が 2 名,3 回生が 5 名,2 回生が 3 名,1 回生が 4 名で構成されており,Dr はドライバー担当を示しています.1 回生は 2011 年度よ り担当を持ちます. ※ ★は兼任 z マネージメント班 板野 光司 プロジェクトリーダー 工学部機械工学科 3 回生 澤田 雅人 リーダー補佐,Dr 工学部機械工学科 3 回生 二川 卓也 リーダー補佐 工学部機械工学科 3 回生 河田 良介 会計,Dr 工学部機械工学科 4 回生 藤谷 宇 HP・制作統括 z 大学院 自然科学研究科機械システム工学専攻 M-1 パワートレイン班 澤田 雅人 吸気系,冷却系,電装系 ★ 3 小山 恵 排気・潤滑系 森田 雅貴 燃料系,Dr 大林 哲也 z 工学部機械工学科 1 回生 良介 リーダー ,シフター,クラッチ 板野 光司 青木 克也 内装・インパクト 竹國 友裕 フレーム 河合 晃輝 ファイアウォール 卓也 日出 桂太 畠山 伸也 大嶋 勇太 工学部機械工学科 3 回生 ペダル・ブレーキ・DT 工学部機械工学科 2 回生 工学部機械工学科 2 回生 工学部物質応用工学科 1 回生 ステアリング,アップライト 工学部機械工学科 3 回生 工学部機械工学科 2 回生 工学部機械工学科 1 回生 工学部機械工学科 1 回生 メンバー 家守 進 藤谷 宇 z ★ サスペンション班 二川 z 工学部電気電子工学科 3 回生 フレーム班 河田 z 工学部機械工学科 2 回生 新入生教育 大学院 自然科学研究科機械システム工学専攻 M-1 ★ ファカルティアドバイザー 河原 伸幸 自然科学研究科 田村義彦 産業創成工学専攻 工学部機械工学科 生体計測工学 田渕 晃嗣 工学部機械工学科 特殊加工学 山根 功 工学部機械工学科 動力熱工学 4 図 2-1 図 2-2 溶接場(左),ラックアンドピニオン(右) OUFP-06 シェイクダウン(左),学長お披露目会(右) 5 2.3. 開発仕様 以下に,各部品の担当者,部材,使用工具,支援団体を示す.ほぼすべての部品製作にあ たっては技術教官の指導を受け創造工学センターの設備を使用し,製作している.なお恐縮 ですが支援団体の敬称は省略させていただきました. 1. 吸気系 担当者 澤田雅人 部品・材料 エアフィルター,スロットル(A1060 塊,ベアリング,バタフライ,バタフライ シャフト,ボルト(M6)),エアリストリクター(A2024 塊,製作依頼),インテー クマニホールド(A1070 丸パイプ,一部加工依頼),サージタンク(A5052 板, A5052 塊,一部製作依頼),インジェクターホルダ (A5052 塊,ボルト(M6), デリバリーレール加工),ブランチ(A1070 丸パイプ,一部加工依頼),ターボホ ース(RUN MAX 社製),ホースクランプ,各ステイ(SS400 板,ボルト(M6), U ナット(M6)) 使用工具 フライス盤,旋盤,NC 旋盤,ウォーターカッター,高速切断機,TIG 溶接機, グラインダー,ルーター,ボール盤, 支援団体 川崎重工業(株)(スロットルバタフライ,ベアリング,インジェクター流用,イ ンジェクターホルダ設計流用),岡山大学工作センター(製作依頼) 2. 排気系 担当者 小山 部品・材料 恵 エキゾーストマニホールド(自作:SS400,STKM11A),ターボチャージャー(IHI RHF3),六角柱(SUS304),テイルパイプ(自作:SUS400),サイレンサー(自作: A5052,スチールウール,グラスウール,パンチングパイプ),ボルト(M8),U ナット(M8),スプリング,ガスケット 使用工具 フライス盤,旋盤,高速切断機,グラインダー,TIG 溶接機,ルーター 支援団体 川崎重工業(株)(曲げパイプ:SUS400,各種ガスケット提供),スズキ(株)(ター ボチャージャー提供),テイクオフ(技術支援) 3. 燃料系 担当者 部品・材料 森田 雅貴 燃料タンク(自作:A5052),燃料ポンプ,燃料ライン,六角穴付ボルト(M6), ナット(M6),緩衝材用スポンジ,ガスケット 使用工具 フライス盤,ボール盤,コンタマシン,旋盤,TIG 溶接機 支援団体 川崎重工(株)(燃料ポンプ,燃料ポンプ変換接続口 提供) 6 U (株)ミスミグループ本社 (ボルト・ナット提供及びスプリングワッシャ提供) 4. 冷却系 担当者 澤田 部品・材料 雅人 ラジエーター(製作依頼),冷却ライン(A5052 丸パイプ,ラジエーターホース, ホースクランプ),スワールポッド(A5052 板,A5052 丸パイプ,ラジエーター キャップベース),各ステイ(A5052 板,SS400 板,ボルト(M6), U ナット(M6), ロッドエンド(M6)) 使用工具 フライス盤,旋盤,溶接機(TIG),ウォーターカッター,グラインダー 支援団体 石原ラジエーター工業所(ラジエータ×2 特別価格提供),川崎重工(株) (ラジエ ーターホース流用) 5. 潤滑系(オイルパン,バッフルプレート) 担当者 小山 部品・材料 恵 オイルパン(自作:A5052),オイルラインホース,アダプター,オイルポンプ, ストレーナ(自作:C2600),バッフルプレート(自作:A5052),ボルト,ガスケ ット,シールテープ,ブローバイホース,キャッチタンク 使用工具 ワイヤー放電加工機,TIG 溶接機,旋盤,フライス盤,ボール盤,タップ 支援団体 ライドオン岡山(エンジンオイル割引提供),MOTUL(テクノイルジャポン K.K.)(エンジンオイル提供) 6. 電装系 担当者 澤田 部品・材料 雅人 フルコンピュータ(M400),ハーネス(M800 ハーネス),4 出力イグニッション モジュール(EMSIGN4),吸気温センサー,MAP センサー,TPS センサー,近 接センサー,水温センサー,ブーストコントロールキット(EMSDBC),ロック 式カプラー(1~4 極),ギボシ端子,丸形端子(φ6,10),キルスイッチ(ロータリ ー型,プッシュオフ型),バッテリー,リレー,配線コード(0.2~2.0sq),トグル スイッチ,プッシュオンスイッチ,パイロットランプ,配線チューブ,防水収 縮チューブ,ハンダごて 使用工具 切断機,ニッパー,ラジオペンチ,電工ペンチ,ハンダごて 支援団体 AVO/MoTeC JAPAN(M400,M800 ハーネス特別価格提供),エーモン工業 (株)(各種電装部品無料提供),FC デザイン(株)(オムロン(株)製 E2E-X2E1 提供, 技術提供),川崎重工(株)(バッテリー,スターターリレー,各種カプラー流用) 7. ドライブトレイン 7 担当者 板野 部品・材料 光司 デファレンシャルギア(LSD),デフマウント(自作:A2017), ドライブシャフト,ベアリング,スプロケット,グリス,ボルト(M10,M8),U ナット(M10, M8) 使用工具 フライス盤,ワイヤー放電加工機 支援団体 NTN㈱,(ドライブシャフト,ベアリング提供),㈱エフ・シー・シー(デファレン シャルギア提供),住鉱潤滑剤(株)(デフグリス提供),(株)ミスミグループ本社(ボ ルト提供及びナット提供) 8. フレーム 担当者 竹國 友裕 部品・材料 鋼管 (STKM11A),エンジンマウント(SS400),ボルト(M10),U ナット(M10) 使用工具 TIG 溶接機,フライス盤,パイプカッター,旋盤 支援団体 三国工業(株)(鋼管曲げ加工支援) 9. ブレーキ関連 担当者 板野 部品・材料 光司 ブレーキペダル(自作:鉄板 SS400),マスターシリンダー,ブレーキローター, ブレーキキャリパー,ブレーキホース,バランスバー(自作),ベアリング,ブ レーキフルード(DOT4),マイクロスイッチ,トグルスイッチ,ワッシャ,銅ワ ッシャ,ボルト,U ナット(M6) 使用工具 旋盤,フライス盤,TIG 溶接機 支援団体 日信工業㈱(マスターシリンダー,ブレーキキャリパー提供),㈱プロト(ブレー キホース割引提供),NTN㈱(ベアリング提供), 10. アクセル関連 担当者 板野 部品・材料 光司 アクセルペダル(自作:鉄板 SS400),スロットルワイヤー,ベアリング,ボル ト,U ナット(M6) 使用工具 旋盤,フライス盤,TIG 溶接機 支援団体 NTN㈱(ベアリング提供),antlion(スロットルワイヤー提供) 11. クラッチ関連 担当者 部品・材料 河田 良介 クラッチワイヤー,レバー(A5052,A2027),マウント(A2027,SS400),カラ ー(SS400),ボルト(M6),ナット(M6) 8 使用工具 フライス盤,旋盤, パイプカッター,TIG 溶接機 支援団体 (株)ミスミグループ本社(ボルト提供及びナット提供) 12. シフト 担当者 河田 部品・材料 良介 PINGEL エレクトリックシフター,エーモン スイッチ, リンケージ(A2017),ロッド(A1050),アングル(t=4.0), スイッチステイ(A1050),ボルト(M6),ナット(M6), ロッドエンド(M6) 使用工具 フライス盤,旋盤,ボール盤,TIG 溶接機 支援団体 エーモン工業㈱(スイッチ提供),ダイハツ工業㈱(ロッドエンド提供) 13. ステアリング 担当者 二川 部品・材料 卓也 ベアリング,ユニバーサルジョイント,歯研平歯車,丸ラック,ラックマウン ト(自作:A2017),ステアリングシャフト(自作:SS400,A2017(コラム)),ス テアリングホイール,クイックリリース,ステアリングホイールスペーサー(自 作:A1050),タイロッド(自作:SS400),ボルト,U ナット(M6,M8),C 型止 め輪,リンクボール(M8) 使用工具 旋盤,フライス盤,ワイヤー放電加工機,TIG 溶接機, 支援団体 NTN㈱(ベアリング提供),協和工業㈱(ユニバーサルジョイント提供),(株)ミス ミグループ本社(ボルト提供及びナット提供) 14. 内装 担当者 青木 部品・材料 克也 TAKATA フルハーネス,ファイアーウォール(A1050),シート(発泡ウレタン), フロアパネル(A1050),遮熱板(A1050),ステイ類(SS400),ブラインドリベッ ト,I ボルト,ロールバーパッド,ボルト(M8),U ナット(M8) 使用工具 シャーリングマシン,コンタマシン,ボール盤,電動ドリル,ハンドリベッタ ー 15. インパクトアッテネータ 担当者 部品・材料 河田 良介 アルミ板(A5052),鉄板(SS400),発泡ウレタン,ブラインドリベット,ボルト (M8),U ナット(M8) 9 使用工具 16. シャーリングマシン,コンタマシン,電動ドリル,ハンドリベッター 懸架装置(アーム) 担当者 日出 桂太 部品・材料 構造用鋼管(STKM11A),スフェリカルベアリング(M8),スフェリカルハウジ ング(M8),ロッドエンドベアリング(M8),ナット(M8),六角材(RDRC13),C 形止め輪(穴用),アーム製作用治具(自作:鉄板 SS400),アームブラケット(自 作:角形鋼管 STKR),アームブラケット溶接用治具(自作:角形鋼管 STKR), ボルト(M8),U ナット(M8),カラー(自作:丸棒 A1050) 使用工具 光学定盤,旋盤,グラインダー,高速切断機,フライス盤盤,TIG 溶接機 支援団体 (株)ミスミグループ本社(ボルト提供及びナット提供) 17. 懸架装置(ハブ) 担当者 二川 部品・材料 卓也 ハブ(自作:A2017,一部既製品加工),ボルト(M8),U ナット(M8),ハブボル ト,センターナット,緩み止めピン,C 型止め輪 使用工具 旋盤,フライス盤 支援団体 三菱自動車(株)水島製作所(ハブ,センターナット等提供) 18. 懸架装置(アップライト) 担当者 二川 部品・材料 卓也 アップライト(自作:SS400),アップライトシム(自作:A1050),カラー(自作: A2017),ベアリング,ボルト(M6,M8,M10),U ナット(M6,M8,M10),C 型止め輪 使用工具 旋盤,フライス盤,シャーリングマシン,ボール盤,TIG 溶接機,ワイヤー放 電加工機 NTN㈱(ベアリング提供) 支援団体 19. 懸架装置(ベルクランク) 担当者 部品・材料 日出 桂太 ベルクランク用板(自作:鉄板 SS400),ベアリング,C 型止め輪(穴用),ベアリ ングハウジンング(自作:丸棒 SS400),ベルクランク製作用治具(自作:丸棒 A1050),ベルクランク溶接用ジグ(自作:鉄板 SS400),プルロッド(自作:構造 用鋼管(STKM11A),六角材(RDRC13),ロッドエンドベアリング(M8),ナット (M8)),ナット(M8),U ナット(M8),六角ボルト(M8),六角ボルト(M10),U ナット(M10),ベルクランクブラケット(自作:角形鋼管 STKR),ベルクランク 10 ブラケット溶接用治具(自作:角形鋼管 STKR),カラー(自作:A1050),コイル スプリング(シリコンクローム系冷間材),AVO ダンパー 使用工具 ワイヤー放電加工機,旋盤,フライス盤,高速切断機,光学定盤,TIG 溶接機 支援団体 NTN㈱(ベアリング提供),(株)ミスミグループ本社(ボルト提供及びナット提供) 20. 懸架装置(スタビライザー) 担当者 日出 桂太 部品・材料 スタビライザー(自作:角形鋼管 STKR,構造用鋼管(STKM11A)),スタビライ ザー用ロッド(自作:構造用鋼管(STKM11A),ロッドエンドベアリング(M8), ナット(M8),六角材(RDRC13)),スタビライザーブラケット(自作:角形鋼管 STKR),スタビライザーブラケット溶接用治具(自作:角形鋼管 STKR) 使用工具 旋盤,フライス盤,TIG 溶接機 支援団体 (株)ミスミグループ本社(ボルト提供及びナット提供) 21. カウル 担当者 部品・材料 竹國 友裕 硬質発泡スチロール,樹脂(コーティング用・積層用),離型剤, ゲルコート,ガラスマット・クロス(#210,#230,#350), 塗料(ゲルコート,サフェーサー,カラー,クリヤ) 使用工具 グラインダー,サンダー,発泡スチロールカッター 支援団体 山陽レジン工業㈱(材料提供・ゲルコート吹付・技術指導), 岡山科学技術専門学校(塗料提供・技術指導・塗装ブース貸出), 内山工業㈱(材料提供) 11 2.4. 活動日程 10 月 3 日 学内走行 10 月 11~12 日 岡山走行会(岡山国際サーキット様) 10 月 17日 ケイマックススピード様にて車体性能測定(シャシダイ) 10 月 29 日 06 重心高測定 10 月 30 日 引退式,送別会 10 月 31 日 設計祭り 11 月 3 日 中部地区静的交流会 11 月 6 日 知恵の見本市 11 月 7 日 学内走行・設計祭り 11 月 14~15 日 日産自動車(株)様主催のサポート講座 11 月 16 日 川崎重工業(株)様にて第 7 回大会結果報告 11 月 21~22 日 日産自動車(株)様主催のサポート講座 11 月 28 日 設計祭り 12 日 2 日 内山工業(株)様にて第 7 回大会結果報告 12 月 5 日 サス班設計祭り 12 月 13 日 設計祭り 12 月 18 日 発注についての説明 12 月 19 日 設計祭り(アセンブリ完了①) 12 月 20 日 SolidWorksJAPAN(株)様主催の講習会 12 月 27 日 OUFP 忘年会 12 月 28 日 大掃除 12 月 29 日~1 月 5 日 OUFP 冬休み 1月7日 設計審査会(OB を招く)アセンブリ完了② 1 月 13 日 自動車技術会様主催のドライビング講習会 1 月 15 日 設計完了日 1 月 24 日 OB 来校アドバイスを受ける 2月5日 学部長裁量経費使い道承認 2 月 13 日 ダイハツ工業(株)様溶接講習会 2 月 16 日 図面提出日 2 月 17 日 製作開始日 3月7日 関西静的勉強会 3月9日 ほのぼの交流会リハーサル 3 月 15 日 三国工業(株)様にてパイプ曲げ加工 3 月 20 日 OUFP 送別会 4 月 5~6 日 ほのぼの交流会 12 4月9日 新入生歓迎会 5 月 1~2 日 マシン展示 5月7日 デザインレポート提出① 5月8日 コスト祭り(図面だし) 5 月 14 日 デザインレポート提出② 5 月 16 日 事前車検会,重量測定 5 月 26~27 日 創造工学センター様より安全講習会 7 月 28~29 日 マツダ自動車(株)様主催のドライビング講習会 6月5日 コスト祭り 6 月 12 日 シェイクダウン 6 月 19 日 学内駐車場にて走行 6 月 27 日 学内駐車場にて走行 7月3日 岡山国際サーキット様にて走行 7 月 10 日 岡山国際サーキット様にて走行 7 月 16 日 新入生歓迎会 7 月 18 日 関西支部合同走行会(名阪スポーツランド様) 7 月 26 日 プレゼンテーション事前練習 8 月 6~7 日 オープンキャンパス車体全バラし 8 月 13 日 岡山国際サーキット様にて走行 8 月 15 日 岡山国際サーキット様にて走行 8 月 18 日 学長・スポンサーお披露目会 8 月 20 日 山陽レジン工業(株)様にてカウルの型にゲルコートを吹き付け て頂く 8 月 21~23 日 岡山国際サーキット様にて走行 8 月 23~24 日 岡山科学技術専門学校様にてカウルの塗装 8 月 28~29 日 学内にて走行 8 月 29 日 科学大好き岡山クラブ様にて車両の展示 9月2日 OB による事前車検 9月3日 ケイマックススピード様にて車体性能測定(シャシダイ)・静的事 前発表練習 9 月4日 OB による事前車検・学内にて走行・静的事前発表練習 9月5日 学内にて走行 9月6日 笠岡ふれあい空港様にて走行 9月7日 静岡へ向けて出発 9 月 8~11 日 第 8 回全日本学生フォーミュラ大会 9 月 12 日 岡山到着 13 9 月 16 日 反省会 9 月 24 日 反省会 9 月 27 日 反省会 10 月 10~11 日 岡山国際サーキット様にて岡山走行会 図 2-3 シェイクダウン(左),第 8 回全日本学生フォーミュラ大会(右), 第 12 回関西支部合同走行会(岡山走行会)(下) 14 3. OUFP-06 車両説明 3.1. コンセプト「基礎理論・設計の熟成化」 OUFP-06 の設計は,昨年度に引き続き「加速・旋回性能の向上」を念頭におき,マシン 開発を行いました.今年度は,さらなる性能向上のために車両作りの土台である基本性能をし っかりとしたものにした上で,次へのステップアップをするべきであると考えました.そこで, 今年度チームコンセプト「基礎理論・設計の熟成化」を掲げ,パッケージング,各セクション, 各パーツで要求される性能を基礎的な理論・根拠に基づき見直しました.そして性能向上を達 成するための具体的なコンセプトや方法をそれぞれで決定し,開発を行っております. 3.2. パッケージング 今年度チームコンセプト基礎理論・設計の熟成化を受けて,まず,車両特性に大きく影響す るパラメータを検討しました.以下に,決定した7点を記述します. ①ホイールベース;1600mm, ②トレッド;F=1200mm,R=1160mm, ③車重;230kg, ④重心高;280mm (最低地上高 30mm), ⑤重量配分;前:後=50:50 左: 右=50:50, ⑥エンジン;4 気筒 599cc+ターボチャージャー (以下 T/C), ⑦タイヤ; BRIDGESTONE 180/510-13 ①大会周回走行のコースの最小旋回半径とタイヤ性能を引き出せるスリップ角の両立を狙 い,コーナリングパワーが頭打ちにならないよう検討すると,このようなショートホイールベ ースとなりました.これにより径の小さいコーナーでも高い旋回性を引き出すことが可能とな っています. ⑤旋回時,タイヤの性能を最大限引き出すため,前後左右の輪荷重をなるべく均等になるよ う設定しました. ②また,トレッドは F>R としています.定常旋回時に,駆動力を伝達するリア内輪が浮 かないように F よりも R のロール剛性を低くすることを目指しました.タイヤ性能を引き出す ために荷重移動量を前後で等しくしたいと考え,ロール剛性の差による荷重移動の差を埋める ためにこのような設計にしています. ③,④基本性能向上のため,構造の簡略化・安全係数の均一化を行うことによる軽量化,さ らに,レイアウトを見直すことによる低重心・ヨー慣性モーメントの低減を図りました.具体 的には,ドライバー,エンジン,T/C,排気系,ダンパーなどの重量物を車両のできる限り中 心・下部にレイアウトしました.また,上部のパーツと車両重心位置から離れたパーツを優先 的に軽量化することで低重心・ヨー慣性モーメントの低減を実現しております. ⑥エンジンには,高出力で小型な川崎重工業製 ZX600R (4cyl,599cc)を採用しました.また T/C には軽自動車用である IHI 製 RHF3 を採用することで, 低~中速回転域のトルクを確保し, 低~中速走行からの加速能力を重視したエンジン特性にしました.T/C による最大過給圧は, 15 高回転域で異常が発生せず,かつターボ効率の高い 1.7bar に設定しています. ⑦タイヤはエンジン高出力化・サスペンション性能向上に伴い,高いグリップ力が求められ ます.そのため,接地面積が大きい大径スリックタイヤを選択しました.また継続使用により, タイヤの性能を引き出すための基礎データがそろい,信頼性のあるホイール径 13inch の BRIDGESTONE 製スリックタイヤを採用しました. 3D-CAD 上のマシンを 図 3-1 に示します. 図 3-1 OUFP-06 3D CAD 3.3. 各パーツ説明 z パワートレイン 「加速・旋回性能向上」を実現するべく,パワートレイン系の行うべきアプローチである出力 向上に重きを置き,以下の二つのコンセプトを立てて,設計を進めました. ①トルク特性の改善 ②最大出力向上 ①に関して,レギュレーションとコースレイアウトのみで考えられたトルク特性では,未熟な ドライバーにとっては扱いにくく,またミスやトラブルに対する対処が難しくなります.そこ でトルクバンドを 7000rpm~9000rpm に設定し,さらに 11000rpm までトルクの落ち込みが 少ないトルクカーブにすることで,いかなる状況にも対応できる特性にすることを目標におき ました.これによってドライバー技術を含めた加速性能の向上につながると考えました.その ために出力に影響するすべての設計において,回転数と出力の関係を考えた設計を行うことと しました. ②について,設計を見直すことで損失や不均一性を抑制し,出力向上が可能であると考えまし た.そこで動力・吸排気系を重点的に基本から細部に至るまで入念な設計を行いました. 以上のコンセプトに基づき設計を行った結果,エンジンの特性は 図 3-2 に示す曲線のよう になりました. 16 図 3-2 エンジンパワー・トルク曲線 エンジン 主な仕様は上記の通りであるが,T/C の搭載にあたり仕様変更を施しました. エンジンのも との圧縮比は 13.3 であり,過給時にはスパークノック(以下ノック)を起こす可能性が大きいで す.点火時期をリタードするだけでは,シリンダーやピストンの耐熱・耐圧性に問題が出てき ます.そこで低圧縮比化を行い,圧縮比を 10.0 に設定してメタルガスケットの厚みを検討・作 製し,組み込みました.また上記に伴い,始動時などの過給圧が低い回転数域で着火を確実に するために,極細電極のスパークプラグに変更しました.しかし,それでもノックの可能性を 否定出来ないためにノックセンサーでノック領域を把握し,EMS で補正を行うことでノック 発生を極力回避しました. エアリストリクター エアリストリクターは“いかに吸入空気量を増やすか”が問題となります.わずかな形状の 変化で最大吸入空気量が決まってしまうため,設計には CFD 解析を有効的に活用して形状を 決定しました.エアリストリクターの制限は最小径のみであるので,この点を境目に上流(イン デューサ)と下流(ディフューザ)を別個解析し,それぞれ最適と思われる形状を合致しました. その状態で再解析をし,吸入空気増大と全圧損失低減を目標にモデルの再構築を行いました. これによりモデル上で全圧損失は前年比 12%の改善に成功しました.また昨年モデルは実物の 最小径が 19mm であったのに対し,本年度は製作精度をあげることで,19.9mm と,リストリ クト径により近づけることが可能となりました.その結果,本年度モデルは昨年比 9.7%の吸 入空気量の増加と,吸入量 0.065kg/sec において 61%の全圧損失低減が実現できました. サージタンク・ブランチ 慣性吸気効果が有効になる回転域を広域化することを目標に,ブランチ長とサージタンク(以 下 S/T)容量に重点を置き設計しました. ブランチ長については 11000rpm 前後で慣性吸気点を同調させるために吸気温度,および脈 動効果による影響を十分に考慮して計算を行い, 実吸気管長として 0.5m を選択し ( 図 3-3 ), ブランチ長としては 0.38m になるような設計を行いました.また S/T 近くを開きテーパにし, 17 大きなアールをつけることで,吸入空気の質量向上と,全圧損失を抑えました. S/T 容量については,容量が大きいと低回転側でのトルクが得られますが,高回転数域での トルクが低くなることが考えられます. そこで昨年度の S/T を基準として 8000rpm 前後で S/T による効果を最大にするために容量を 1.2L としました.しかし容量が小さいと,各気筒への 吸入空気の等分配が難しくなるため,S/T 形状を前後の系を含めた CFD 解析と製作難易度に よって決定しました.その結果,定常流れにおける等分配率の向上に成功しました ( 図 3-4 ). また製作面にも気を配り,接続部にインロウ加工を施すことで,段つきを減らし,製作時にお ける流路抵抗の増加を限りなく抑えました. 図 3-4 サージタンク CFD 解析 図 3-3 吸気管長の検討 ウェイストゲート 使用する T/C の特性から考えると,外付けウェイストゲートバルブ(以下 W/G)を採用する ことによる費用対効果は低いと判断し,内蔵型 W/G を採用しました.W/G の制御にはアクチ ュエータを使用し,その制御に電子式ブーストコントローラを使用することで,様々なパラメ ータを考慮した過給圧の細かな制御ができ,過給圧の立ち上がりを素早くしています. エキゾーストマニホールド T/C の機構上, “いかに低回転数域から過給圧を確保し,高回転数域で頭打ちにならないよう にするか”が,エキゾーストマニホールドの設計において重要な課題となります.そのため低 回転から排圧を確保できる 4-2-1 集合の 2-1 部分を極力短くすることで,4-2-1 集合の特性を持 たせつつ,排気干渉を起こしにくい設計を行い,低回転から高回転まで排気干渉を起こさずに 排圧を確保出来るようにしました.また管内径を排気ポート出口の 79%まで絞ることで排気流 速を高め,ターボラグの低減を狙っています. マフラー パッケージングを優先して全長を短くしました.そこでサイレンサー内径をφ50 から急激に 広げて拡張比を昨年比 2.8 倍にし,さらに隔壁を利用したストレート構造を採用しました.こ れにより太く短いマフラーでの消音効果を狙っています.さらに排気性能も考慮にいれ,走行 18 速度と大気の相対速度を利用して排気抜けの向上を狙っております.また,消音材の交換がし やすいように分解ができるような構造とし,整備性向上を図りました. 冷却系 エンジン出力にとって効果的な水温,85℃前後で安定させることを目標において設計を行い ました.実験や CFD 解析の結果から,ラジエータコアを厚み 16mm の一層にし,前面流速を 高くする方向で冷却性能を確保することにしました.面積を増大させるとともに,前面風速の 分布を均一にすることも考慮に入れ, 取り付け角度を進行方向に対して約 30 度つけています. また低重心化と重量バランスをも考慮して,フレーム両側にラジエータを搭載する設計を行っ ています. 冷却性能は前面風速に依存しているため,ラジエータ前方にディフューザ形状のダクトを 設けることで,前面風速の確保,加えて風速分布の均一化を図りました.また後部に電動ファ ンを設け,低速走行での前面風速を確保しています.しかしながら,そのままではラジエータ を通過した熱風が後輪に直接影響してしまうと考え,後方にもダクトを設け,タイヤに熱風が 当たらず,スムーズに排出されるような形状のダクトを取り付けました. 潤滑系 純正オイルパンはオイル溜めが大きく下に突き出ているため,エンジン搭載位置や重心を下 げる障害となっていました.そこでオイルパンを自作することで,エンジンの搭載位置を 55mm 下げ,車両全体の低重心化を図りました.また,エアがみや車体 G により油面が不安定 になるのを防ぐため,ストレーナ周辺にオイルを集めることできる構造のバッフルプレートを 実験により検討し,取り付けました.その他に,費用対効果や生産性を向上させるため,オイ ルパンを2分割して製作を行うなどの工夫もしています. 燃料タンク 過去の燃費のデータをから燃費と残留燃料量を考え,耐久走行で必要な容量を確保するため に,容量を 5.5L に設定して設計を行いました. 車体にかかる最大旋回・加減速 G による燃料の寄りから,残留燃料量が少なくても燃料供給 できる形状を検討しました.昨年度車両における最大旋回 G が 1.7 で,約 66 度傾けた場合と 同等だと考え,最大 70 度傾けても安定した燃料供給が可能な形状を目指しました.これに加 え,偏りを防ぐためのバッフルプレートを設け,残量が少なくても燃料を供給可能にしました. さらにポンプ周辺の燃料を集めるために,燃料吸い込み口の周囲に段差を設けています.製作 時には曲げ加工を多用することで,溶接部を減らしてコストを削減し,強度と安全性を確保す ることができました. 燃料噴射器 19 本年度もフュエルインジェクター(以下 Inj)を下流(プライマリ),上流(セカンダリ)の2カ所 に取り付け,燃料輸送距離と気化時間を同時に満足しようとするツインインジェクター方式を 採用しました. プライマリ Inj は純正と同角度,同距離に配置しています.これはポート形状がサイアミーズ 式であり,Inj は 2 方向に噴射するので,Inj の角度,距離は純正の時点で最適であると判断し たためです. プライマリ Inj は応答性を重視し,ポート近くに設置しているのに対し,セカンダリ Inj はポ ートからできるだけ距離を離すことで燃料が気化するための距離を設けました.これにより, 混合気の形成を促進し,燃焼効率を向上すると考えています.角度は Inj と反対方向の壁面に 噴射した燃料が付着せず,かつ出来る限り管内全域まで届くような角度を CFD 解析により決 定しました. ギア比 アクセラのシミュレートを実施した上で,ギアの段数はドライバーの負担とトルク特性を考 慮し4速としました.各ギア比はアクセラでの最終速度を最高速度として選定していき,第一, 第二減速比は最大トルク時に空転せず,ギアチェンジ後のエンジン回転数がパワーバンドを外 さないような値を選択しました. デファレンシャルギア デファレンシャルギアの設計においてタイヤの性能を最大限引き出すことを検討しました. コーナー脱出時は内輪荷重が少なく摩擦限界が低いため,内輪空転時に駆動力をかけることが できません.そこで, LSD を採用することで,コーナー脱出時などにおける駆動限界を引き 上げました.LSD は小型・軽量な HONDA 製 ATV 用 F.C.C Trac を選択しています.LSD の イニシャルトルクを調整することで,コーナー脱出時の駆動力確保と旋回性能のバランスをと れるようにしました. また,LSD 内部のギアの潤滑にグリスを用いることで整備性や信頼性が向上しました.加え てオイルシールやハウジングが削減できるため,軽量化にも貢献しています. デフマウント 車両後端に位置しヨー慣性モーメントへの影響度が高いため,軽量化を重点的に設計しまし た.FEM 解析を用いることで,強度を維持しながら約 15%の軽量化に成功しました.加えて 配置位置を見直すことで低重心化を図っています. 駆動方式はチェーンドライブを採用しております.チェーンテンションの調節は整備性を考 え,ロッド方式とし,ドライブおよびドリブンスプロケット間の距離を無段階に調節できる機 構としました. また,ベアリングのシール構造を非接触形にすることで,摩擦トルクが減少し,加速性能・燃 20 費の向上が期待できます. 制御系 エンジンは元の特性と大きく異なる特性を追求しており,ドライバビリティを考慮した特性 の適正化が必要であります.また,走行状況による車両特性の変化が著しいため,EMS には フルコンピュータである MoTeC 製 M400 を採用しました.これにより常時車両の状態をフィ ードバック制御し,エンジンの性能を最大限に引き出す設定を行いました. またデータロガーを搭載し,毎走行ごとにデータを採取することで,車両評価を常時行える ようしました. z サスペンション 車両目標の「加速・旋回性能の向上」実現のため,昨年度同様タイヤ性能を限界まで引き出 すことに重点を置き,サスペンションパーツのコンセプトを以下としました. ①タイヤ接地性の向上 ②高い製作精度による信頼性 ③整備性の向上 ①キャンバ変化,荷重の移動量およびタイヤの動的な接地性に重点を置いた初期ジオメトリ 設計を行いました.具体的には,ロールセンタ,キャンバ角変化の検討,バンプステアの低減 などであります. ②設計値と実際の走行での挙動を近づけるためには,製品の完成度に高い精度が求められま す.主に,ジグを用いることによるアーム・アップライト・ブラケットの製作などを行いまし た. ③さらに,それでも生じてしまう製作誤差や,タイヤのたわみ量など設計段階での不確定要 素から生じる想定外の事態にも柔軟に対応できるよう,整備性の向上をいった.主に,操舵力, ロール剛性,最小旋回半径といった調整可能なパラメータを増やしました.また,それらの調 整機構については,調整幅が広く,細かな変更が可能で,かつ,調整しやすいものを目指すこ とでドライバビリティの向上につながると考えています. 姿勢変化 (ジャッキアップ・アンチダイブリフト) ロールセンタの移動に関して,キャンバ変化と車体のロール角を考慮した設計を行いました. まず,車体正面視でのロールセンタ高を Fr<Rr と設定し,最大バンプ・リバンプ時の左右ロー ルセンタ移動量を考慮した設計を行っています ( 図 3-5 ).これにより,フロントはジャッキ ダウン傾向,リアをジャッキアップ 0 とすることで旋回内輪の浮きを抑制することを狙いまし た.結果的に内輪の浮き抑制を確認することもできました.また,車体の前後荷重移動の変化 による車体の姿勢変化を抑えるために,最大のブレーキ荷重に対しアンチダイブ力 5%,アン チリフト力 10%としました.これにより,キャンバゲインによるタイヤ接地面積の減少を防い でおります. 21 図 3-5 ロールセンタ移動 タイヤ空気圧 キャンバ変化によって,タイヤの接地面積が減少すれば旋回性能の低下を招く.それを抑え るために,タイヤの旋回時におけるたわみ量を考慮したうえで,対地キャンバが変化しても接 地面積を維持できるように,タイヤ空気圧を 80kPa と設定した. 対地キャンバ 旋回外輪側の路面接地面積を増加させるため,対地キャンバが常にネガティブ側 1 度以内に なるようなジオメトリとした. キングピン軸 キングピン軸に関して,フロントはキャスタ角を 0 度とすることで,キャスタ角による転舵 時のキャンバ変化を 0 度とし, ジオメトリ設計での不確定要素の一つをなくしました. これは, 転舵時の持ち上げトルク減少による復元性が,キャスタ角を変化させても,それほど大きく変 更するものではないと考えたためであります.これによりジオメトリと現実の挙動の誤差を少 なくすることができました.また,キャスタトレールを短くとり,転舵させる時のタイヤの回 転トルクを低減させることで操舵力を減らしました.リアはキングピン軸を前傾に設定し,ア ームよりも相対的に剛性の低いトーコンロッドをロワアームより前側に取り付けることで旋 回時の外輪側をトーイン方向に向けさせ,車体が安定するようにしました.サスペンション サスペンションを設計するにあたり,「加速・旋回性能の向上」を達成するため,システム の要件として「タイヤの性能を限界まで引き出すこと」を考えました. 調整機構 ③を達成するために,3D-CAD 上において工具が入るかなどの検討を行い,構造面での見直 しを行いました.アップライトには,スリット型のシム調整機構を採用し,さらにナットを固 定できるような構造に設計することでタイヤを外さなくてもキャンバ角の変更が簡単に行え 22 るようになりました ( 図 3-6 ).フロントタイロッドの取付け位置も同様にシム調整式にし, 操舵力の変更を可能となっています.プルロッドによる車高調整機構を整備しやすいアップラ イト寄りの空間の空いたスペースに設けています.また, スタビライザーの腕部分の取付け 位置を調節することによって,サスペンションのロール剛性を変更可能となっております.加 えて,ステアリングタイロッドの調節機構の配置スペースを考慮してトー角を調整しやすくな りました.以上の調整機構により走行時のセッティング時間の短縮を実現しました ( 図 3-7 ). バネ周りでは,ダイヤル式の減衰調整機構,プリロードによる初期荷重の変更も可能です. また,ステアリングラックに操舵角を調整できる機構を設けることにより,操舵力を変える ことなく,最小旋回半径の変更ができます. ブレーキに関しては,フレキシブルバルブとプロポーショニングバルブ(以下 P バルブ)をド ライバーの手元に配置することで,走行中でも前後ブレーキバランスを調整できるようになり ました. 図 3-7 整備時間 図 3-6 キャンバ調整機構 アーム 設計通りにジオメトリが機能するよう,高剛性なアームを設計製作しました.主に,アーム の開き角,パイプ径の再選定を実施しました. また,定盤および高精度なジグを用いた製作を行うことで,アームの製作誤差を小さくしま した ( 図 3-8 ).一方で生産性を考慮し,同じジグを繰り返し使える設計とすることにより, 使用する材料が従来の 1/4 となり,加工時間の短縮およびコスト削減につながっています.サ スペンションブラケットについてはアームのピポット位置をすべて同時に固定できるジグを 製作し,ピボット点間の位置関係の精度を高めました.フレームにうまく荷重を受け流すこと を検討し,ブラケットをアームからの入力方向に向ける設計とすることで,取り付け点の剛性 が上がり信頼性が向上しました. 23 図 3-8 アーム溶接用ジグ バネ周り バネ周りは,初期ジオメトリ設計で考慮したパラメータを多く含んでいます.そのため,そ れらの迅速なセッティングに重点を置いた設計を行いました.初期設計は,レギュレーション で定められているタイヤのストロークに対し,ダンパーストロークを最大限まで使用できるよ うにするため,前後ともストローク比を約 1:1,モーションレシオを 1 としました.また,ニ ュートラルステアになるように,前後の左右荷重移動量は 50:50 で設計し,スタビライザーで ロール剛性の変更をすることによるアンダーステア,オーバーステアへの変更が容易になりま した.さらにストロークセンサーを用いて,走行時のストローク量変化の計測を行い,荷重移 動量について設計値との比較ができるようになりました. また,構造面では,ベルクランクの可動部にベアリングを用いることによりフリクション を低減し,ジオメトリの微小な変化にも過敏に反応できるようになっています. アップライト アップライトに要求される性能は軽量かつ高剛性であるという考えのもと,構造面での工夫 を行いました.今年度はジオメトリを最優先したため,多少の制限が生じたものの,材料を A2017 から弾性率の高い鋼管へ変更することで,剛性を確保しつつ軽量化を図りました.さら にフロントでは,スピンドル部をアップライトと一体型にし,構造面での工夫を行い,約 16% の軽量化につながりました. リアハブベアリングに関しては,車両の走行時間を計算し,ベアリングの寿命時間を最適化 させ,外径をφ72→φ62 と小さいものに変更しています.これによりリアアップライトは約 8.5%の軽量化に成功しました. 鉄の溶接加工は溶接ひずみによる製作誤差が生じる可能性が高い.それを解消する為に専用 のジグを製作することで,精度を高めると同時に生産性も向上させました.またジグを前後共 通のものにすることでジグの製作点数を減らしています. ハブ 軽量化による慣性モーメントの低減を考えました.ハブはホイールを支持する重要部品であ るため,フロントハブにおいてはA2017の削り出しで製作し,軽量・高精度のハブを目指しま した.リアハブにおいては,分割方式を採用し,駆動軸側を鋼鉄製,ホイール側をA2017で製 作しています.これにより,剛性を確保した上での軽量化を実現できました.また,ブレーキ ロータとのアセンブリ状態でFEM解析を行い ( 図 3-9 ),強度的に問題がないことも確認して います.その上でフローティングピンの取り付け位置をφ120→φ130とし,4輪あわせて約10% の軽量化を達成しております. 24 図 3-10 前後制動力配分 図 3-9 ハブアセンブリ FEM 解析結 ステアリング ドライバーがサスペンション性能を十分に引き出せるように,ドライバビリティを考慮しま した.ラック&ピニオンをフレーム下部に配置したことにより低重心化,さらに自作すること で入力荷重を考慮したサイズの適正化を行い,既製品のステアリングラックに比べ約46%の軽 量化を達成しました.タイロッドとアームとのピボット位置をCAD上で考察し,バンプステア を極力抑えるジオメトリを設計しています.シャフトに使用するユニバーサルジョイントをダ ブルジョイントにすることでトルクの位相変動が生じにくくなりました. 制動力配分 Pバルブとバランスバーを用い,大会コースで測定された減速Gの範囲(~1.3G)で前後制動力 配分が最適値に近づくように設計しました( 図 3-10 ).これにより,コーナー侵入時など,減 速Gと旋回Gが複雑に作用する場面での限界性能が向上しています.前輪と後輪それぞれのブ レーキラインに圧力計を設置することで定量的なセッティングを行えるようになりました. 制動安定性 ブレーキは熱によって制動力が不安定になりやすいです.そこでパッドは高温に強い焼結の レース用のものを使用しました.ブレーキディスクの固定方法は,フローティングマウント方 式を採用し,熱応力によるひずみ発生を抑えパッド接触面を確保することで安定した制動力を 得られるようになりました. 高出力なエンジンに対応する安定した制動力を得るため,4 輪アウトボードブレーキを採用 しました.そうすることでコーナー進入時にデフを介さず直接ホイールに制動力が作用し,ブ レーキバランスの乱れがなくなり,制動力の安定化も実現しています. z フレーム フレームに要求されることは,各部からの入力やねじれに対する剛性の確保,シンプルな構 25 造による軽量化,運動性能に関わる低重心化やヨー慣性モーメントの低減であると考えられま す. 今年度車両の設計においては,これらを実現するため, ①必要なスペース確保した上での更なる小型化 ②細かな構造見直しによる剛性向上 を念頭においた設計を行いました. ①についてドライバースペースを突き詰めすぎるとドライバーにとって操作しづらく扱いに くいマシンとなり,マシン本来の性能を発揮できません.ドライバーやパーツの正確に寸法を 把握し,デッドスペースを削減しました.②について応力解析を利用し適切な構造・部材の配 置を検討し設計製作をしています. レイアウト 1/1 モックアップを製作し,実際にドライバーが無理なく操作をするのに必要なスペースの 測定を行いました.また,3D-CAD 上においても,ドライバーやエンジンなどの簡易モデルを アセンブリしながら設計を進め,よりコンパクトなフレームとなるようにしました.さらに, 底面をボトム構造とすることでドライバーやエンジンの搭載位置を下げ低重心化を図ってい ます. 軽量・剛性化 軽量・高剛性な車体とするため,トラス構造を基本としたスペースフレームを採用しました. サス等からの入力をフレーム交点に入力することで,力を分散させることを基本とした設計を 行いました.解析により各部材に掛かる負荷を評価し,負荷に対して適切な剛性の部材を配置 することで剛性を維持した軽量化を行いました.また,サスペンションアーム取り付け点の変 位を均等にすることでフレーム剛性以上にサスペンション機能を安定させることを狙いまし た. ロワアームに比べ,負荷の小さいアッパーアーム側のリアボックス構造を省略することによ りヨー慣性モーメントの低減および軽量化を図りました.昨年度フレームでは小型軽量化のた め曲げの多い構造となり,剛性の確保が困難でありましたが,今年度車両は同様の構造をとり ながらも曲げの箇所を少なくすることで剛性を確保しました. 生産性 材料としては,安価で溶接などの加工がしやすい STKM11A を採用しています.製作におい て,フロントフープ以前のフロント部とメインフープ以降のリア部を別々に製作し,最後にコ ックピット部で繋ぐことによって生産性向上を図りました.ジグは,一体のものを使用し,前 後をつなぐ際の精度を確保しました. 26 整備性 エンジンの下に開口部を設けることによって,フレーム底部からエンジンを素早く取り出せ る構造としました.これにより,組付けおよび取外し時間を 25%短縮することができ,生産性・ 整備性ともに向上しました. z コックピット たとえ,車両性能が優れていても,乗りこなせなければその意味を成しません.ドライバー が直接触れ,操作する,コックピットに求められていることは,ドライバーの実力を発揮させ, 車両の限界性能付近で安定して走らせることであると考えました.以上のことから操作性に優 れた車両を作ることで加速・旋回性能向上へつながると考え,コックピットのコンセプトを以 下のように決定しました. ドライバビリティの向上 これを受け,コックピット設計では一貫して操作性向上に努めました.具体的には,「操作 性に優れたコックピットレイアウトの検討」 , 「電気シフターや操舵力・踏力の削減による軽快 な操作系」などを実施しました.加えて,基本性能向上のために軽量・低重心・ヨー慣性モー メントの低減を目標とし,FEM 解析を駆使した部材の適正化などを行いました. レイアウト コックピットのレイアウトを決定するにあたり,主に以下の 3 点を行いました. ①まず,昨年度車両の設計を見直しドライバーの意見を反映させるために,シフター・クラ ッチ・ステアリングホイール・ペダルなどのパーツについてコックピットアンケートを実施し ました.このアンケートをもとに操作系の設計を行い操作性向上に努めています. ②CAD・モックアップを用いたドライバーポジションの測定を行い,操作系パーツのレイア ウトの検討をしました.モックアップを用いて, 図 3-11 のような項目で身長 160~185cm の 15 人分のデータを取りました.その結果から,さまざまな体型に合い,操作しやすいコッ クピットスペースを決定しました. ③操作しやすい範囲内でレイアウトを調整することで,軽量化・低重心化・ヨー慣性モーメ ントの低減を実施しています. これらにより,ドライバーの実力を引き出すコックピットスペースを実現しました. 27 クラッチレバー シフトスイッチ 図 3-12 シフト操作 図 3-11 モックアップ シフト・クラッチ 大会コースはコーナーが多くギアチェンジの回数も多いため,両手でステアリング操作を行 いながらシフト操作が可能になれば,ドライバーの負担を大きく軽減することができると考え ました. そこで,まず電気シフターを利用したパドルシフトを採用しました.それに加えて,点火カ ットとの併用により,ボタン操作だけでシフトアップが行えます ( 図 3-12 ).これにより,操 作性が向上し,シフトロス・ミスの減少を可能にしました. 次にクラッチは,操作が安定し やすいパドル式のクラッチレバーとしています.これらにより,両手でステアリングを握った ままシフト操作を行えるという大きな利点を得ています. ステアリングホイール 操作性向上のため,CAD・モックアップでステアリングホイールの位置・角度を検討しまし た.角度を数パターン用意し,それらを比較して多くのドライバーにとって扱いやすいものを 採用しています.またステアリングホイールの前後位置を調整できるようにすることで,ドラ イバーの体格に合わせた微調整も可能になりました. スラロームなどでの切り返しをする場合,俊敏な操作ができる必要があります.そのために, 持ち替える必要がない操舵角で,なおかつ無理のない操舵力で切り返せることを目指しました. 結果,ステアリングジオメトリを見直すことで,操舵角は昨年同様,左右最大 90 度としなが ら,操舵力を昨年度比 65%と扱いやすいステアリングが実現しました. ドライバビリティ ペダルの操作性向上のために,関節の可動域とペダルの踏みやすさを考慮して,CAD 上で ブレーキペダルの初期角度を検討しています.CAD である程度範囲を絞り込んだ後に,モッ クアップを利用して,チームのドライバーの体型に最も合うペダル位置,角度を決定しました. 一方,ペダルの初期角度を調整できるようにし,ドライバーの体格に合わせた微調整も可能と なりました.加えて,ペダルを踏み込みやすいよう踏面を大型化しガイドを設けました.また, 28 ドライバーに負担が生じないようにブレーキペダルのペダル比を大きくすることで,踏力を昨 年度比 80%とし操作性を向上させました. 軽量化 ペダルは車両レイアウト上フレーム先端付近に位置し,その重量がヨー慣性モーメントに与 える影響は大きいです.そこで必要な強度剛性を維持しつつ軽量化達成を目標としました.ま ず,マスターシリンダーをユニット下側に配置することで全長を短くしフレームのオーバーハ ング短縮をしました.一方,前後位置調整機構を省くことで構造を簡略化しています.CAD 上で身長 165~185 ㎝のドライバーモデルを作成し,それぞれの身長で姿勢・関節角度などを調 査した結果,ペダルユニットに前後位置調整機構がなくても,95%lie の範囲内でドライバー が無理なく操作できるようなユニットとなり,身長に対する適合性を実現しました. 安全性 車両事故が起きた場合,ドライバーを守るのはコックピットの役目であります.安心して運 転に集中でき,万が一の場合にドライバーの命を守るため安全性を考慮しました. まず,アクティブセーフティとしてパイロンや障害物を想定し,視野角の検討を行いました. その結果,フロントフープを下げることにより,ごく近距離における障害物の認識が可能とな りました.また側面視野においても十分な角度をとりました.昨年度との視野の比較を 図 3-13 に示します. 次に,パッシブセーフティとしてレギュレーションに定められているものに加え,足のスペ ースに余裕を持たせることで,素早い脱出が可能となりました.素早い脱出のために,脱出時 に踏むフロアパネルの下部にパイプを入れ剛性を確保しました.また,ハーネスのラップベル トやヘッドレストの位置はどの身長でも適合するように設計しています.加えて,自力で脱出 できない場合を想定し,シートがすぐに外れ,シートごと引っ張り上げられる構造にしまし た. パイロン 200mm の場 図 3-13 前面視野比較 29 整備性 T/C やエンジンを調整する際,ファイアウォール(以下 FW)をすばやく取り外す必要があり ます.そこで,FW をはめ込み式にしてボルト止めすることで,整備性の改善を図り,結果 FW の整備時間を 40%短縮しました ( 図 3-7 ). z カウル 速いだけでなく,見る人を魅了する車両とするため,いくつかのデザイン案を作成し最終デ ザインを決定しました.材料としては,軽量で形状の自由度が高い GFRP を採用しています. 製作において,原型の抜き勾配にあわせて雌型の数を増やすことで,硬質発泡スチロールで できた原型に負荷をかけず,離型に掛かる時間の短縮を図りました.またカウル表面の硬度を 上げるため,エアガンを使ってゲルコートを吹き付けています.これにより,美しさと生産性 を兼ね備えたカウルを実現しました. 30 4. 第 8 回全日本学生フォーミュラ大会について 4.1. 第 8 回大会結果 コスト審査 44.20/100 26 位(70 チーム中) プレゼンテーション審査 52.5/75 13 位(75 チーム中) デザイン審査 119 /150 7 位(65 チーム中) アクセラレーション 9.40/75 38 位(出走 42 チーム) スキッドパッド 0.00/50 未出走(出走 33 チーム) オートクロス 26.24/150 43 位(完走 53 チーム) エンデュランス -25.00/400 72 位(完走 32 チーム) 総合 226.34/1000 42 位(エントリー85 チーム) 第 1 走目 5.630 秒 第 2 走目 - 第 3 走目 - 第 4 走目 - 第 1 走目 - 第 2 走目 - 第 3 走目 - 第 4 走目 - 第 1 走目 1 分 11 秒 605 第 2 走目 2 分 22 秒 797 動的競技結果 アクセラレーション スキッドパッド オートクロス 第 3 走目 エンデュランス 1 分 17 秒 442 第 4 走目 1 分 15 秒 236 耐久走行 21/24 周でリタイア 燃料消費 - 31 図 4-1 図 4-2 大会風景 車検の様子 32 4.2. 各種目別考察 プレゼンテーション審査 プレゼンテーション審査は,発表時間10分,質疑応答5分,残り15分でプロジェクターのセッ トやパソコンの準備,片付けなどを行わなければならない.内容,構成,ビジュアル資料,発 表,質問の5項目で評価される. 本校は,指定時間になるとすぐに準備を開始した. 準備完了後,審査員の合図があると発表を開始した.発表は,他のメンバーに合図をしても らうようにしていたこともあり,制限時間の10分ちょうどにまとめることができた.発表後, すぐに質疑応答に入った.今年も3人の審査員からの質問が始まった. 「初期投資額はいくらか」 や「販売台数の根拠について」などについて質問をされた.初期投資額に関するスライドは準 備していたが,販売台数の根拠については明確な回答をすることができなかった. 事前の準備が足りなかったが,去年もプレゼンテーションを担当していたためなんとか対応 できたという感じだ. 結果は52.5点で13位となった(75点満点・参加校75校).今後,10位以内目指すのであれば,ス ライドを早い段階で作って発表練習に時間を割く必要があると感じた. 今回の反省を活かして,次回は発表技能の向上を目指したい. (板野 光司) デザイン審査 デザイン審査は,大会前に提出するデザインレポートと当日審査の総合評価で行われる. 当日審査は,車両写真撮影 5 分,発表 10 分,パート別質疑応答 10 分,講評 5 分の合計 30 分という構成だ. 我々は当日の審査よりも事前提出のデザインレポートによる評価を重要視し,チームコン セプトを決定し,それを元にそれぞれのパーツ設計へと掘り下げていくプロセスを明確に記 述するような内容とした.レポートをまとめる時も班リーダクラスの経験のあるメンバーの みで行い,修正しては全体を読み,また修正を行うという工程を何度も繰り返し,完成させ た.結果,提出期限ギリギリとなってしまった.最後まで熱心に修正を行うのは良い事かも しれないが,余裕を持った行動も大切だ.次回からは,その点を改善したい. 当日審査においては,私がコンセプトに関しての発表を 5 分ほど行い,その後それぞれの パートに分かれて説明・質疑応答へと移った.発表時に使用したパネルは,大会間際に作っ たため内容が煮詰まっておらず,デザインレポートに比べて非常に低レベルのものとなって しまった.審査員による質疑応答は,事前に提出したレポートを見て疑問に思われた点を指 摘された.シャシーに関してのパネル質問は,内容が薄かったためかほとんどなされなかっ た. 結果は,119 点で 7 位となった(150 点満点・参加校 65 校).審査員からはデザインレポー トに関しては,かなりの高評価を得られていたが,設計に対する評価が欠落していて,それ 33 が 7 位(デザインファイナル出場可能となるのは 5 位から)にとどまった原因ではないかと思 われる. 今回でデザイン審査の評価方法が分かってきたので,次回からは,今回よくなかった点を 修正していきたい. (二川 卓也) デザイン審査は,車両の製作に関して審査される部門である.コンセプトに対してどのよ うにアプローチしたのか.数多くある理論を正確に理解し,それを用いてどのようなデザイ ンにしたのか.または,その理論の中からどの要素に焦点を当ててデザインしたのか.そし て,車両の目標に対してどの程度達成できたのか.これらを審査されると考えている. 昨年度(05)ではデザイン担当者もいたが,こちらでも考えてみるということで,自分なりに 考えたデザインを提出していた.自分なりに把握していた車両のデータと,各担当者から提 出してもらっていたデータを基に,デザインレポートを書いた.結果として自分が書いたレ ポートでは,安全性や生産性のことが大きく抜けていたため,目標としていた得点に届かな かった. 今年度は,3回生と他数名でデザイン会議を行った.前年度のレポートが評価されていた ため,レポートの形式は同様でいくことになった.しかし,方向性が二転も三転もしたのは 問題であったと思う.最終的には各担当者に提出してもらったレポートを班で確認・編集し, それをデザイン担当者がまとめるということになったと認識している.会議を行った時期は 比較的早かったものの,最終的には例年のごとく,提出前にパタパタとまとめる作業を行っ ていた.そのため,昨年度までに評価されていた項目・不足していたと思われる項目に関し て記述しているか確認を行った.また,文章のチェックを行う時間はあまりないだろうと判 断し,なるべく内容を変えることなく修正の手伝いを行った. 大会当日の審査には立ち会わなかったものの,メンバーの話を聞いている限りでは事前に 提出していたデザインレポートの配分が大きく,当日の審査はその確認作業や担当者の理解 度,新しく追加した項目について審査されるものだと感じた. デザイン審査は車両トータルの性能に関して技術的な評価が行われる.そのため,デザイ ン担当者は自分が担当している分野のことだけでなく,なるべく車両全体の知識(主に理論的 なことに関して)が求められる.各担当者からレポートを提出してもらう形式も良いとは思う が,それが必ずしも正しいとは限らない.重要なのは,デザイン担当者がわからないことや 疑問に思った部分については,実際に各担当者と話し合って,双方の考えを統一する必要が あることである. また, 34 ・毎年新規に評価されるため,過去に評価されたことは書いておく. ・審査される項目の内容や過去のFB資料を確認して,審査ポイントを理解する. ・各々が考える理想に対して現実が伴っていない場合もあるため,そのときの車両の状 態を把握する. ・デザインレポートを基準に審査されると考えられるため,レポート提出時に評価項目・ 内容もなるべく付け加えたほうが良い. 今年度の順位より上を狙うためには,また別な要素が必要になってくると思います.今年 度行った字数配分とかではなく,実験的・実践的結果や考察が必要ではないかと思う. (藤谷 宇) 時間的都合により審査用のパネルは不十分なものになってしまった.審査当日,発表 5 分 質疑応答 10 分と聞いており,コンセプト・方針の発表が 5 分くらいで終わるよう二川氏に 発表を頼んだ.しかし,実際の審査はその発表後,各パートに分かれて発表を行うことにな った.練習を一切していなかった自分は,不完全なパネルとアドリブによる発表でパワート レインのデザイン説明を行っていった.約 5 分の発表後,主にパネルに記載されていること について複数質問をされた.何か指摘されると思っていたが,特に掘り下げられる事無く質 疑応答は終了した.どうやら審査員によれば当日審査は確認程度のものであるそうで,殆ど がデザインレポートで決まるようである.また設計に対する評価が全く足りていないらしく, それが出来ていればひょっとしてファイナル審査に残っていた可能性もあるようである. (澤田 雅人) 図 4-3 デザイン審査(1) 35 図 4-4 デザイン審査(2) コスト審査 コスト審査は,事前提出のコストレポートと当日審査の 2 つに分かれている. 点数配分としては,車両コスト 40 点,コストレポート 40 点,当日審査(リアルケースシナリ オのみ)20 点の計 100 点となっているので,本校はコストレポートに重点をおいて取り組ん だ. コストレポートは,製作工程,製作コスト,製作図面の 3 つから構成されており,これら をより正確で見やすく記入し,コストレポートを参照すれば,車両が製作できるほどの仕上 がりにしなければならない.そこで,本校は,昨年度に不十分であった製作図面を工程別に 分けたり,アッセンブリ図面と溶接図面を分けたりし,見やすくなるよう工夫した. また,製作工程や製作コストにおける記入ミスをなくすために記入例を配布し説明するなど の対策も行いコストレポートを提出した. 当日審査は,コスト討議 20 分,リアルケースシナリオ 10 分の 2 つから構成されている. コスト討議は,2 点から構成されていて,1 点目にレポート提出後から変更した部品におい て再提出したコストレポートの変更理由とコストが変動した理由を述べることである. 2 点目に審査員がコストレポートの不十分な点における質疑応答を行う. 1 点目においては,各々のパーツ担当者が対応し,減点もおそらくなかったと考えられる. 2 点目においては, 「カウルの図面が見当たらないが載せましたか?」, 「アップライトのシム の図面が見当たらないが載せましたか?」と審査員から質問を受けたが,実際にコストレポ ートを開いてみると図面があったので,審査員の見落としであった. 「ブレーキラインがどうなっているのかわからない」という批判も受けました.これについ ては,配線図のように繋がっている場所を明確に示す必要があるようなので来年からは,き ちんと記入したい.特に,注意された点としては,ブレーキディスクの図面を指定された場 所にいれていなかったとこである. 今年度のリアルケースシナリオは,フレーム,排気系,ステアリングシステムのなかから ランダムに一つ選択され,そのカテゴリにおいて製造コストを 15%削減する案を発表し,そ れに対する質疑応答を行う.今年はステアリングシステムをアルミの丸棒を削り出しすると 36 いう工程を,アルミパイプとアルミ板で溶接して製作するという内容で発表し,審査員に「精 度が良くないし,アルミ溶接は難しい」と評価を受けた. 結果は,車両コスト:28.2 点,コストレポート:0 点,リアルケースシナリオ:16 点,と なり合計点:44.2 点でした. コストレポートは 0 点という評価であったのは,おそらく,ブレーキシステムの図面の少 なさ,コストレポートの図面の位置間違い(ブレーキディスク),他人が見ても分かりやすいコ ストレポートではない(図面の位置や工程),という 3 点で減点されたと思われる. 今年度の審査員の評価,コストレポート不足と思われる点を生かし,改善し,また, 岡山大学内だけでなく,他大学との交流により,さらなるコストレポートの改善をして, 来年度はきちんと評価されるコストレポート作成を行いたい. (日出 桂太) 図 4-5 コスト審査 アクセラレーション 大会の数日前にドライバーとして決まり,練習もほとんどできずに大会に挑むこととなっ た.1本目はスタートやシフトチェンジのタイミングが合わなかったため,タイムを出すこ とはできなかった.2本目で合わせていこうと考えていたところ,オイル漏れの指摘があっ たために走行禁止となった.当日は雨が降り,路面に水溜りができていたため,オイル漏れ は発見しやすい状況となっていたと思う.間に合わせの修理ではあったが,担当者が修正を 試みて競技会場に持っていった.しかし,再度漏れが確認され,スタートラインまでたどり 着きながら走行禁止となった. 練習不足から,一本目からタイムを出すことができなかった.今後は練習量を増やし,あ らゆる状況に対応できるようにする必要があると感じた. (藤谷 37 宇) 図 4-6 アクセラレーション スキッドパッド スキッドパッドも大会数日前に練習した.このときにアンダーが酷く,スピードを少し上 げるだけでアンダーとなる(外に膨らんでいく)挙動であった. 大会では,先のアクセラでオイル漏れの指摘があり,再び修理をする必要が出た.競技の 時間枠が決められているため,時間ギリギリに修正した後はスキッドパッドを走ることにな った.しかし,ここでもオイル漏れが確認されたため,走行禁止を余儀なくされた. この競技では足回りのセッティングが重要となってくると感じた.そのため,走行練習を 重ねる中で,調整幅の理解やドライバー技術の向上により性能を高めて行く必要があると感 じた. (藤谷 38 宇) オートクロス 走行前,プラクティスにより路面を把握したつもりであったが,本番コースはプラクティ スより若干滑りやすく感じた.初めての大会走行という緊張からかスラロームでブレーキ踏 み外したり,コーナーでのスピンなどミスをおかしタイムを残せず,自分の練習不足や未熟 さを感じた.また,上位校に比べてプラクティス走行回数が少なく,大会での時間の使い方 に改善できる点があると感じた. (河田 良介) 競技開始直前,コース路面状況は午前中の気まぐれな雨のお陰でウェット状態,雨は止ん ではいたが,また何時降り出すか予報士にすらわからない雲行き.そんな不安定な状態で競 技が開始された.他の大学の動きなどどうでもいい,今は自分たちが出走出来るよう,為せ ることに全力を尽くした.オイルが垂れさえしなければよい,ということで問題箇所を耐熱 パテで埋め尽くし,それでも漏れる分は耐熱バンテージを垂れる箇所に巻くことで吸収し, さらにその周囲にアルミテープを巻くことで何とか漏れない様にする応急処置を行った.そ のあと 10 分間のアイドリング運転にて実験.問題の漏れは確認されなかったので,プラクテ ィスにて漏れの最終確認を行うことに.プラクティスの列に並ぶ頃,すでに午後 3 時を回っ ており,ダイナミックパスを持つ面々は焦りを感じていた.両ドライバーのどちらかしか乗 れないのかもしれない.そのように判断したリーダーは本来のファーストトライバーである 河田氏を車両から降ろし,代わりにセカンドドライバーである私を乗せ,プラクティス後そ のままアタックする作戦に切り替えた.この読みの浅い判断が大きな誤算であったことに気 づくのは競技終了間際であった.プラクティスを任せられることとなった私は直前,この状 況で何が出来るかをもう一度考えた.まずオイル漏れは問題ないであろう.むしろ問題視し なければいけないと直感的に感じていたのは路面状況である.ダイナミックエリアの一部は 乾き始めている.しかし,情報によれば本コースは濡れているどころか水たまりがあるとい う.ドライタイヤは皮むきすら行っていない以上,ウェットタイヤでアタックしなければい けないことは明白.とすればこのタイヤの温度を上げておかなければ,とも思いながらオフ ィシャルの持つフラッグを確認し,発進し,ハンドルを切ってみた.案の定と言いたいとこ ろであったが,予想以上にハンドルが軽く,曲がらなかった.ウォールに激突しないように 走るのが精一杯だと思っていたら,見事に頭から刺さってしまった.幸い傷一つ(車体が)無か ったが,若干ながら絶望感を感じた.グリップの良いプラクティスエリアですらこの通りで ある.本コースは悲惨であることに間違いはない,絶対にグリップしないから慎重に,ブレ ーキは早めに.そう何度も心の中で復唱し,頭の中でシミュレーションしながら,アタック へ望んだ.もしここが遊園地ならおもしろくないアトラクションなのか?と思いたくなるく らい列は空いていた.異様に高鳴る緊張感を押さえる暇もなく,自分の番がやってくる.走 り出せば同じ,これもいつもと同じ走行.そう考えたところでアドレナリンの分泌を抑える ことはもはや無駄であった.さらに,たった2周でタイムを出さなければいけないというプ 39 レッシャーが頭を支配してくる.そのせいであろうか,一周目は・・・と考えていた自分な りの作戦は忘れ去られてしまった.スタートラインとこちらに目で合図してくるスタートオ フィシャルを目の前にして,頭の中にあるのは第一コーナーのことばかり.オフィシャルの 目が「用意はいいか」と問いかける.そして降られるフラッグ.すかさずクラッチを繋ぎに かかる.路面のグリップが全くないのが,加速しながらブレる車体から伝わってくる.ブレ が収まり,セカンドに切り替え終えた時点ですでに第一コーナーへのアプローチを開始して いた.気持ちより早めにブレーキング,ハンドルの感触をいちいち確かめながらステアリン グを切っていく.何とかスラローム入口まで問題なくクリアしていく.コースウォークして いなかった自分には,コース幅が例年より縮まっているように思えた.パイロンスラローム を抜け,ストレート.クランクでわずかに速度を落とし,次のコーナーに望む.高速コーナ ーを抜け,左の中速コーナー.そして左の低速コーナー.思ったよりグリップしていたよう に感じていたからだろうか,ブレーキを送らせてしまい,急に車体はまっすぐ進み出す.何 とかグリップ回復を試みて見るも,ぎりぎりパイロンタッチ.そしてその後も何度か同じ事 を繰り返しながらゴールへ.何となくコースの特徴と状況は理解できた.電光掲示板を見る と1分9秒.次のラップは6秒位いくだろうか?と思いながら再びスタートラインへ着く. 今度は落ち着いた気持ちでオフィシャルと目を合わせる.今度こそ,と意気込みながらフラ ッグを横目に見る.さっきより気持ち程度つっこみ,早く立ち上がる第一,第二コーナー. スラロームでパイロンをはねそうになったが何とか回復,そしてクランクにまっしぐら.今 度は軽いエンジンブレーキだけで乗り切る.ここからが勝負,と気合いを入れながらいくつ かのコーナーをパスし,問題の場所へ.しかし,早めのブレーキングを行ったにも関わらず, 曲がらない.ブレーキが早かった分,パイロンをはねることなく立ち上がる.若干慎重にな りつつも,次のコーナーに望む.ブレーキ,そしてハンドルを切って...!? しまった,90 度コーナーじゃ無かった!時すでに遅し.追い打ちにフロントがロックする.確定してしま った+2秒に怒りを覚え,それがコーナー立ち上がり中でのアクセル全開という失態をやら かしてしまう.気付いたときにはいつの間にかカウンターを当てていたが,無駄に終わった. コースアウトしながらコースに復帰.沈んだ気持ちのままゴールへ.セカンドドライバーに 感覚の共有化を図る.その際にタイヤをさわってみたが,冷たかった. 以上のことから,時としてマシンスペック以上にドライバーの腕や作戦がタイムに影響を 与えることが理解出来る.それが出来ない限り,どんなに高スペックなマシンを用意出来た としても,我が校が勝てる見込みは無いであろう. (澤田 雅人) 40 図 4-7 オートクロス エンデュランス エンデュランスは得点配分も大きく,パイロンタッチなどへのペナルティも大きいため, とにかくミスをしないよう慎重に走行することを心がけた.今年度のコースはオートクロス とほぼ同じであり,ある程度落ち着いて走行にのぞめた.最初の 2 周は特に問題なく順調に 走行できた.しかし,エンジントラブルにより途中失格となってしまった.自分自身にもフ ラッグの見落としというミスをしてしまった.今年度はトラブルなどから耐久走行などの練 習機会が少なく,車体やドライバーに余裕を持たせることができなかったように思う.今後 はトラブルを少なくしていくことや合同走行会などへ積極的に参加し,車両とドライバーの 走行機会をできるだけ多く確保していくようにしなければならないと思う. (河田 良介) ファーストドライバーが走っている最中,自分が出すラップタイムを予想していた.今一 分七秒ぐらいで走っているから,もしかすると一分フラット出せるか?しかし,タイヤのタ レや燃料の事を考えると,八週目くらいまでは抑え気味に走った方が良さそうか,などと現 41 在の状況下における走行のシミュレーションをしていた.もう一台走っていた他大学の車両 に残りラストラップのアナウンスが耳に入る.不思議と落ち着いていたのは,昨日,一昨日 緊張の連続だったからであろうか.他大学に続き,ファーストドライバーが戻ってくる.念 のため,交代までの間,ファンとポンプを回し,続いて水温計を見る.79℃・・・思ったよ りだいぶん余裕,むしろオーバークール気味かなと,心に大きなゆとりを持ち,バトンタッ チ.車検も無問題で,リスタート.アイドルが少し高いのはもう仕方ないと割り切る.初め て立ったエンデュランスのスタートラインで悦に浸っている暇も無く,フラッグが振られる. 勢いよく…飛び出さず,あくまで慎重にコースイン.いつも通り,走り出せばいつも同じ. 何があっても完走させなければいけないというのがいつもと違うところ.パイロンもはねず, コースアウトもせず少しずつペースを上げようと試みる.ここで一つ異変が起きる.走行中 に何の前触れもなくエンスト.車体が止まる前に何とか再始動.少し走ってから少しパワー が無くなっていることに気づく.そしてついには一度減速すると,エンジン回転が上がらな くなるほどパワーが無くなってしまった.何とか数周は半クラッチを使いながら走行.ゴー ルまで持ちこたえてくれ.その願いもむなしく,さらにパワーが無くなる.そしついにはア イドルすら保てなくなり停車.必至にスターターを回すが,1500rpm 辺りでくすぶるタコメ ータの針は,自分に苦渋の決断を差し迫った.ふと漏れるため息と共に,根性という最後の 希望が抜けてしまい,ドライバーとして,エンジニアとして最も屈辱的な格好を躊躇いなく 行うこととなった.両手でクロス,自主的リタイアを示すジェスチャー.遠くにいたマーシ ャルが迫ってくる中,ふと今までの苦労が蘇ってくる.そのせいでどっと疲れが出たのであ ろうか,悔しいという感情さえ生まれなかった.しかし,そのような無気力な状態にも関わ らず,頭はエンジンが止まってしまった原因だけはひたすら追求していた. (澤田 42 雅人) 図 4-8 エンデュランス 43 4.3. エンジントラブルの報告 4.3.1. 分析 ●大会前に起きたトラブル ・最高ブースト圧 0.7bar まで上がった 9 月 6 日走行時 ヘッドカバーが変形し,サクションバルブ部をふさぐ自作パーツ部から排気もれ発生 →ヘッドに取り付けたカムポジションセンサーのコードが溶損 問題発生時が大会直前であり,ヘッドカバーはセンサー取り付けの加工をしており, 交換は不可能であったため,パテでの補修のみで大会に臨むことになってしまいました. ※今シーズンの車両での最高ブースト圧は 1.2bar でありますが,1回走行したのちに ブースト圧を下げました.(大会時は大事をとって 0.4bar で臨んだ.) ●エンデュランス走行時の状況とトラブルについて 第一走者(河田)が出走,最初の方は順調に走行していました. (回転域は 6000~7000rpm あたり,水温は 70℃前後で安定していた) しかし,交代直前にエンジンストールしてから明らかに今までとは状態が一変し,スラロ ームなどで低速域にするとパワーがまったく出ないという状況になりました. 第二走者(澤田)に交代後,アクセルを踏み込んでいるにもかかわらずそれに応じた回転 数の上昇をしないということが起きました. このときすでに4気筒のうち1気筒は破損していて機能していなかったと思われます. 交代後,2~3周走った後にエンジンストールしました. 再走行をすることはできたが,やはり回転数が上がらない状況は続いていました. 半クラッチのままでの走行でなんとか回転数を保つ走行を続けていたが,徐々にエンジン がふかなくなってきました. この時点で2気筒目(もしかしたら3気筒目も?)も破損していた可能性があります. あと3周を残したときついに走行不能となり,再始動のための 1 分間の猶予時間が与えら れたが,残って機能している気筒(これも壊れかけている可能性あり)だけではアイドリ ング回転数にすら達しない状況であり,リスタートできずリタイアとなってしまいました. 次ページにエンデュランス時のロガーデータを示します. (図1) 44 エンジンストール エンジンストール 暖機運転 第一走者 第二走者 図1.エンデュランス時のロガーデータ(図中の はドライバー交代時) 図1の一番上の段(赤色)のエンジン回転数データからもわかるように,交代前後にエン ジンが止まっていることが分かります. ドライバーの意見にもあった「徐々にふかなくなった」という状況は上から3段目(水色) のブースト圧変化を見ても明らかです. また,上から4段目(黄緑)のスロットル開度データからリタイア直前ではスロットルを 全開近くにしていても回転数がまったく上がっていないことが確認できます. ●エンデュランス後 イグニッションコイルを確認したところ,イグニッションコイルが破損していることがわ かりました. (図2) そこで,新品と交換し,始動を試みたところ,問題なくエンジンは始動しました. →イグニッションコイルのみ故障,エンジン内部は問題なし 45 膨張してい 白くなってい 図2.イグニッションコイル(左側が破損,右側が正常) イグニッションコイルの抵抗値を測ったところ,図3,4のような結果を得ました. 図3.破損した2次コイルの抵抗値(エラー) 図4.正常な2次コイルの抵抗値(5.4kΩ) 46 1次コイルの抵抗値は破損したコイルは 1.1Ω,正常なコイルは 1.0Ωと,どちらも正常範囲内であり,異常 はありませんでした. しかし,図3,4からわかるように2次コイルでは破損したコイルが異常であることは明らかであります. また,破損したコイルではスパークしなかったことを確認しました. ちなみにサービスマニュアルの正常数値は以下の通りです. z 一次コイル:0.8~1.1Ω z 二次コイル:5.0~6.8kΩ ●トラブル原因考察 なぜイグニッションコイルが破損したのか,未だにはっきりとした原因はつかめていないが,現在以下の 4 点が関係していると考えています. 1. 大会前にスパークプラグをスタンダードからイリジウムプラグに変更し,通電性等の理由で電流過多と なった ⇒イリジウムプラグが原因 2.圧縮行程だけでなく排気行程でも点火をしてしまった ⇒ECU との相性が悪い 3.通電時間が長い状態でエンジンを回し続けていた ⇒ECU の設定が不十分 4.コイルに流れる電流の通電時間が長かった ⇒イグニッションシステムの相性が悪い これらの中から原因を絞るために考えたのが以下の走行手順です. ●原因追究のための走行手順 ※実際アイドリング,短時間の走行程度のエンジン始動では今までやってきたことと変わりないため,20 分 間の耐久走行を行うことを1セットの走行としています. スタンダードプラグ 完走できず 完走 プラグ関係ない イリジウムプラグで2セット走行 完走 完走できず プラグ関係ない イリジウムプラグが原因 イグニッションシステム変更 図5.スパークプラグが原因かどうかを特定する走行プログラム 図5のように走行した後,スパークプラグが原因だと特定できず,イグニッションシステムも問題なかった 場合,通電時間を短くした状態で図5と同様に耐久走行を行い、原因を特定する予定です. 47 ●10 月 23 日岡山国際サーキットでの走行 原因がスパークプラグかどうかを特定するために走行に向かったが,その暖機運転中にエンジンから異音が 発生し,突然始動不可能になりました. スタータモータの故障かと思い,スタータモータ周りを分解し,始動を試みたがスタータ単体では問題なく 回るが,エンジン全体としては始動できないという状況でありました. そこで吸気バルブの確認を行ったところ,#2 の吸気バルブの変形が確認されました. (図6) その時点で走行は不可能だと判断しました. 走行後,エンジンの分解を行ったところ,当初予想していた吸気バルブの方ではなく,排気バルブの片側が 折損していることが判明しました. (図7,8) バルブシートも傷ついており,エンジンヘッドの継続使用は不可能だと判断しました. また,#2 のピストンも破損していたが,幸いシリンダには傷はありませんでした. (図9) カムシャフトとチェーン,テンショナーに破損は確認されませんでした. 図6.吸気ポートから見た変形した吸気バルブ 図7.エンジンヘッド全体から見た排気バルブの破損 48 図8.破損した排気バルブの拡大図 図9.#2 のピストン ●原因考察 1.10 月 9,10 日での岡山走行会にて暖機運転中にアフターファイアが発生していたため,そのときに排気 バルブにダメージを与えていた上に,10 月 23 日の走行の暖機運転時に水温 60℃台から最高 8000rpm まで 回してしまったことで追い打ちをかけるような状況になってしまった 2. 自作ガスケット(約 2mm)を挟んだことでチェーンが通常より突っ張る現象が起こり,カムタイミン グ等に影響を与えたという可能性も視野に ⇒その場合排気バルブが片方のみ破損するとは考えづらい ⇒カムタイミングによる破損ではない 3.スロットルの開閉を繰り返したためにバルブスプリングが共振を起こした可能性や高回転時(8000rpm) にサージングが起こった 4.点火タイミングのずれで排気バルブが開きかけたとき,または開いている途中で点火をすることで排気 バルブに多大なる負荷を与えていた (5. )レギュレータが破損⇒何か関係性? 図10に示すロガーデータ(最下段)からもわかるようにレギュレータが破損した時点から急激にバッテリ ー電圧が上がっていることが確認できます. (通常は最高 15V 程度) 49 異音発生 レギュレータ破損? 電圧異常領域 図10.バルブ破損時のロガーデータ 4.3.2. エンジンのこれからの方針 エンジンベンチ導入 利点 ・シェイクダウン時期を待つことなくセッティング出しに時間を割ける ・トラブル解決に向けてのトライアンドエラーが容易にできる ・現在のエンジン能力をデータとして常に管理できる ・エンジン稼働時間が増えるため,トラブルに対しての対応力が上がる 問題点 以前まで始動程度でのエンジンベンチの導入はしてきたが,本格的に回すとなれば自作のエンジンベンチ, シャフトで強度的には問題ないのか?という部分で問題があります. 解決策 現在考えているのは減速することでドライブシャフトの利用を可能にし,カップリングとしての機能を備え ている上に車体に限りなく近い状態を作り出すことも可能です. 動力伝達流れとしては, エンジン(プライマリスプロケット)→チェーン→ファイナルスプロケット,デフ →ドライブシャフト→ハブ→自作シャフト→動力計 50 という流れを考えております. 図1.エンジンベンチ 動力計 エンジン 図2.減速シャフトイメージ図 図2において,赤色部分が自作シャフトであり,ファイナルスプロケットから自作シャフトまでを表してい ます.また,全長は約 560mm です. 図3.実際に使用予定のドライブシャフトとハブ 51 動力計仕様 ・メーカー:東京メータ株式会社 ・高速回転型渦電流式電気動力計 ・型式:EWS-150-L ・表1.仕様(定格性能等) 最大吸収馬力 kW(PS) 最高回転速度(rpm) 最大吸収トルクNm(kgm) 慣性モーメント GP2(J) 冷却水量(L/min) 110 13000 235(24) 0.034 63 給水圧力 kPa(kgf/cm^2) 給水排水口径 芯高 mm アンカーサイズ 重量 kg 52 60(0.6) 25A 450 4-M14 200 図4.高速回転型渦電流式電気動力計性能曲線 以上,動力計仕様については東京メータ株式会社様のホームページより引用いたしました. URL:http://www.tokyometer.co.jp/elc/data.html 53 実験室の写真 図5.上記の動力計 図6.実験室の冷却設備 図7.動力計まわりのレイアウト 左側にエンジンを置く予定です. ちなみに,動力計とエンジンまでの距離は 300mm 程度 (多少の距離の前後は調整可能) 図8.実験室の換気設備 減速比とスプロケットの選定 手計算により1速におけるデフにおけるトルクが 750Nm と求めました. しかし,このままでは使用する動力計の限界トルク 235Nm を超えてしまい,危険です. これにより,スプロケットの選定が必要だと考えられます. そこで私たちが現在考えているものが以下です. ・プライマリスプロケットのナットがはずれない ⇒プライマリスプロケットは純正のまま(歯数 16)にし,ファイナルスプロケットの方で減速比の調整 ⇒エンジンベンチによるセッティングの場合,何速あたりを使うように設定するべきなのか? ・もしファイナルスプロケットの減速比に合ったものが見つからなかった場合 ⇒プライマリスプロケット側も選定し,プライマリ,ファイナルスプロケットの両方で合わせていく ⇒はずれないスプロケットナットをどうにかしてはずさなければならない 54 2010 Okayama University Formula Project オイルもれ対策 大会中,ターボチャージャー部からのオイルもれが発生し,スキットパッド競技に出走で きませんでした. ⇒いくら完璧なエンジンに仕上げても走れなければ意味がない そこで,原因の考察をし,原因追究,解決のためのスケジュールを立てました. そのスケジュールを次ページの図9に示します. 最後に,2011 年度は目標に向かって1歩1歩でも前進し,来年の報告会では良い結果をお 伝えできるように努力いたしますので,今後ともご支援よろしくお願いいたします. - 55 - その対策 解決 オイルもれなし - 56 - 解決 オイルもれなし オイルもれなし 現在の状況 図9.オイルもれ対策スケジュール 解決 オイルもれなし この時点でオイルもれは解消するものと予想しています。 オイルラインのホース径を1サイズ大きくし てラインの組み直し オイルもれあり 現在のエキマニを切断して短くすることで ターボ位置を30mm上げる オイルもれあり この時点でオイルもれは解消するものと予想しています。 現在のエキマニを切断して短くすることで ターボの位置を30mm上げる(同時にリ ターンライン側の自由度も上がる) リターン側にフィード側同様にチャンバー を設置(オイルが溜まる場所をターボでな くチャンバーにする) オイルもれあり オイルラインに原因がありうるため、フィー ドラインのオリフィスの代わりにチャン バーを設置(ホース内の脈動を解消し、ま たチャンバー内にオイルをためることで供 給量の減少を図る) オイルもれあり エンジンを傾けて始動し、その状態でオイルもれが ターボ位置(最低地上高ギリギ あるか確認する。(オイルパン内の油面がタービンの リ) 軸より下にすることが目的) 原因として考えられるもの 2010 Okayama University Formula Project 2010 Okayama University Formula Project 5. 2010 年度チーム反省 5.1. テクニカルディレクター ―全体を通して― 今年度は,自分の力不足もあり,非常に難しい年であったと感じる.また,昨年度の反省 もあり,今年度はリーダーや各担当者の自主性に任せ,注意するポイント・トラブルとなり そうなポイント・疑問に思うポイントに絞り,担当者に説明・提案した.自身は担当者では ないため,その説明・提案を聞き入れるかどうかは,各班や各担当の判断に任せた.結果と しては,機能していなかったと実感している. メンバー個々の能力は高いであろうことを感じていたが,チームワークというものを考え ている人が少なかったと思う.主力となる学年のメンバーの意見・思想がバラバラで,最後 までまとまりを感じなかった.昨年度は男女編成ということで難しい面もあったと思うが, チームスポーツをする上での理由にはならないと思う.今年度はまた異なり,リーダーを中 心に方向性などを話し合って,一致団結していく姿勢が見受けられなかった.最も肝心な走 行も,全員が必ず参加するのではなく行ける人だけといった,従来との違いにギャップを感 じた.前年までとのチーム体制の違い,車両の考え方の違いなどにスタンスを迷い,モチベ ーションを保ちきることができなかった.これは自分の不安定さによるものと考えている. また,決定権の有無やスタンスが曖昧であった.そのため,テクニカルディレクターの役割 を明確にし,メンバーとの連携を密にする必要性を感じた1年間であった. そのため,今年度は,全メンバーが活動していたトータルの時間は,前年までと比べると 確実に少なかったように思う.工作センターで一人だけ作業していた時間も,長かったので はないかと思う.楽しさを感じられずに,モチベーションが上がらなかった人もいたと思う. 上の学年がまとまらずに,苦心した人もいたと思う.これらが今年度の結果や現状を導いた ものであると認識しており,テクニカルディレクターとして少しでも改善できる方向に持っ ていけなかったのは,力不足であった. ―トラブルに関して― 大会は一発勝負であり,トラブルが出たからといって走りなおすことはできない.そのた め,大会前に発生したトラブルやトラブルの芽はなるべく摘んでおく必要がある.今年度で あれば,パワトレ班のオイル漏れやサス班のアンダーであると思う.オイル漏れの問題は, 完成してから一度走行したあとに症状が現れ,その際にタービン位置が怪しいのではと提案 していた.アンダーの問題は,(これがアンダーの原因とは言い切れないが)設計の段階でキャ スター角の考え方に疑問を持ち,確認・提案をしていた.このときにTDとして理由をきち んと説明し,伝わっていれば回避できたこともあると思うため,コミュニケーションが不足 していたと感じている. - 57 - 2010 Okayama University Formula Project ―走行に関して.― 今年度は,リーダーが走行に関しても目標を設定して,大会を完走できる内容のものを考 えていた.これは形を変えて,行った方がよいと思う.大会までに行う内容として,トータ ルの目標から走行毎の目標まで,具体的に何をするのか,どのパーツを評価するのか,どの パーツのセッティングを変えてみるのか.ただ走っているだけでは意味がない. 今年度であれば,ショートレンジの走行が多かったり,テクニカルな走行(スラロームなど) を全く行えていなかったりしていたように感じる.そのため,あまり慣れていないドライバ ーの技術は上がらなかったと思われる.100%完成した車両や,センサー感度の高いドラ イバーが乗っているわけではないため,走行練習で乗ることの意味を履き違えないようにし ておいた方が良い.速く走ることも大事ではあるが,セッティングを変えたときに感じとれ るセンサーを鍛える必要があると思う.「(セッティングを変えたら)こう変わった」 ,「○%く らい踏み込んだときにギクシャクする」など.セッティングの幅や傾向を知っておけば,対 策の方向性を決めやすくなると思う. また,高速コーナーだけでなく,低速コーナーやスラロームに関しても同様だと思う.定 状円が最も単純でわかりやすいため,定状円を作り,だんだん速度を上げていったらオーバ ーになるのか,アンダーになるのか.スタビの硬さなどのセッティングを変えたらどう変化 していくのか.エンジンはアクセル開度に対してどの程度ついてくるのか.ドライバーは車 両挙動に対してどう感じているのか.この辺の地道な走り込みは必要だと思う. また,今年度の走行は全員参加ではなかったが,走行に行って何もしなくていい人がいる わけがなく,時間に余裕がある人は,何かできることはないか客観的に探すことができるた め,走行効率の向上には重要なことだと思う. ―時間の使い方に関して― 時間の使い方に関して. あくまでチームスポーツである.そのため製作期間は,自分の使える時間を自分だけで使 うのではなく,他のメンバーを手伝えるような余裕を持てる時間配分をしてもよいと思う. 自分の担当箇所をなるべく早く終わらせる作業スケジュールを考えることで,他のメンバー を手伝うこともできるし,万が一トラブルが発生しても,全体のスケジュールを変更するこ となく対応可能となる.締め切りを見据えて動くのではなく,残っている作業に対してどう 動けば早く終わるのか.考えることはなかなか難しいし,自論ではあるけれども,大事なこ とだと思う. また,作業を始める前に,その日に終わらせる内容を考えておくことで,その日の時間の 使い方が変わってくることもあると思う.一日で区切りよく終わりそうな内容であれば集中 してやりきり,何日もかかりそうであれば区切りを複数設け,区切りよく進めていく.膨大 - 58 - 2010 Okayama University Formula Project な作業も,区切りのいいところで順に終えていくという感覚を持つことで,作業量の把握と 目標の設定ができ,効率も上がっていくと思う. 加えて,自分の作業がなかったとしても,誰かが作業をしている可能性があるのであれば (誰かが作業しているのを知っているなら),積極的に手伝う姿勢を持つことも大事だと思う. やりたいことがあったり,自分の時間も大切であったりすると思うけれども,自分の担当箇 所でなければ来なくていい・関係ないと思うのは,チームスポーツとして活動している上で, 見当違いだと思う. 仕事としてではなく,給料という見返りをもらっているわけではないため,モチベーショ ンを保つことは難しいと思う.けれども,チームに対してスポンサーとして資金・資材を提 供してくれている人がいるという責任を忘れてはいけない. この活動は,車両を考えて大会の上位を目指すことが念頭にはあるが,仕事としてやって いない分の自由度の認識や能動的に動くことの必要性,モチベーション維持の難しさやチー ムワーク(チームスポーツ)を考える大切さ,他にも時間の使い方など数多くのことを学ぶこと ができる,他にはない機会であると思う.全力で取り組めば取り組むほど,見返りは大きい. (藤谷 図 5-1 宇) 暖機を見守る TD 5.2. 新人教育 OUFP では,毎年新入生に対する教育が十分に行われておらず,初めて各パーツの担当者 となった段階でスムーズに設計・製作に着手することができていなかった.その点を踏まえ, 本年度は新しく新人育成班を設け,各パーツ担当者となった段階で戸惑うことなく設計・製 作に着手できることを目的として活動を行った. - 59 - 2010 Okayama University Formula Project 具体的な内容としては,まずパワーポイントを使用して講義形式で基本的な説明を行った. OUFP での活動内容,車についての基礎知識,材料や加工技術,設計に関して説明を行った. その後は,SolidWorks による設計方法に慣れるために,実際に各個人で SolidWorks を使用 して練習を行った.最終的には,各個人にそれぞれ SolidWorks を使用した課題を与え,期 限までにその課題の物を完成させるということを行わせた. 以上が今年度の新人育成班として行った内容である.この活動によって,SolidWorks の使 用方法についてはある程度慣れることができたと思われる.しかし,本来ならば,工作機械 を使用しての製作練習,各パートのより詳細な内容に関する説明なども行うべきであった. これらの点については,今後の改善点として考えたいと思う. 今回行った活動がどのような効果をもたらすか未知数な部分もあるが,今後はより内容を 充実させていくことで効果は期待できると考える. (家守 進) 5.3. プロジェクトマネージャー OUFP の活動では 1 年を通したプロジェクトの中で様々なイベントがある.最も大きなイ ベントは毎年 9 月に行われる全日本学生フォーミュラ大会であるが,それを目標に合同走行 会や車体のシェイクダウンなどの予定が組まれる.その他にも設計・製作・走行などの車体 開発に必要な時間や,デザイン・コスト・プレゼンテーションなどの大会の静的審査の準備 時間も必要である. このように時期により行うべきことがあり,一つ一つを確実にこなしていかなければ大会 で上位を目指すことはできない.しかし OUFP では毎年のように設計完了時期が伸び,製作 が遅れ,結果的に静的競技の準備や走行に割く時間が大幅に削られてしまうことが毎年起こ る.そのため 2010 年度チームでは年間を通してのスケジュールだけでなく中日程・小日程 の確認と管理を行う目的でプロジェクトマネージャーの役職をおいた. この役を設けたこと自体は意味があったであろう.少なくともスケジュールについて改善 すべき点が多々あることは分かった.しかし最終的にはこの役は機能しておらず無駄になっ たとも考えられる.私が考える理由は,現実的で明快なスケジュール管理内容や方法を定め られなかったことである.中途半端な計画で実行に移すと途中で崩壊するのは必須である. また私が可能か不可能か見極められなかったことにも問題がある. 最後にスケジュールに関してだが,状況が変われば方針もまた考えなおすべきである.こ れまでのように押し通すだけではチームにとってもメンバーにとっても悪い影響しかないは ずである.幸いにも次期は,最近の OUFP の中では時間の重さについて最も理解しているメ ンバーであるため,これまで以上にスケジュールを意識した活動ができると考える. (高橋 - 60 - 直也) 2010 Okayama University Formula Project 5.4. すべてを終えて 今年の大会は,本当に悔しい思いをしました.この 1 年間の私たちの努力は,一年に 1 度 しかない大会で結果を出せなければ終わりです. 昨年 9 月,新チームを立ち上げ,マシンの構想を練るところから始め,製作,そして走行 及び調整し,大会に臨む ―――― この一連の流れを「1 年間」という時間の中に収めな ければならない厳しさを学びました.あと少し時間があれば・・・このような仮定は現実という 目の前に立ちはだかる大きな壁に淡い夢であることを悟らされました. ただし,今年度の評価すべき点としては,理論的な設計ができ,それをフィードバックで きるようになったことが挙げられます.また,担当した 1 年間だけでなく 1 年後,2 年後を 見据え長いスパンで成長していこうという意識を持てるようになったことも,私たちが成長 したという点から評価できると思います.マシンの設計に関しては,その密度が濃くなり, より理論に基づいたマシンが出来上がりました.また,静的競技においては,過去の資料を フィードバックしてやることで,着実にレベルアップしているといえます. 一方,逆に残念な点としては,動的競技で成績の低下をもたらしたことが挙げられます. 机上でよく練られたマシンであっても速く走れるというわけではないことを痛感しました. 大きな設計変更をすれば必ずトラブルは付いてきます.今回では,エンジンを新しくしたこ とで私たちが想像していた以上に,トラブルが相次いで発生し,解決しきれないまま大会に 臨むことになってしましました.どんなに理論的に優れたものを作っても,トラブルやセッ ティングやドライバーなどによって性能を引き出せなければ意味がないのです.この点,深 く反省すべきで,実践することの重要性を思い知りました.来年度のチームは,今年の反省 をもとに大会で壊れない・速いということを目標に運営していきたいと思っています. 信頼性の高いマシンを作ることとは,技術力に見合った設計をすることはもちろんのこと, 走り込む時間を多くとること,さらに毎回の走行を充実させることが大切だと十分認識しま した. マシンがエンデュランス中,走れなくなったときのことです.チーム一丸となり苦楽をと もにしたこの 1 年間の夢が一瞬で崩れ去るのを感じた時,涙が出るほど悔しい思いをしまし た.この気持ちを決して忘れず,2011 年度の活動に入りたいと思います. (板野 - 61 - 光司) 2010 Okayama University Formula Project 図 5-2 大会最終日の集合写真 - 62 - 2010 Okayama University Formula Project 6. 2010 年度収支決算 2010 年度の収支報告をいたします.最後に,多くの方よりの資金や物資のご支援,ご協力 をいただき,無事にこの 1 年間を終えることができました.支援して下さった皆様,まこと にありがとうございます. 項目 収入 09 年度繰越金 \3,344,099 岡山大学支援金 \3,198,182 スポンサー様よりご支援 \1,900,000 OB 様よりご支援 \50,000 メンバー負担金 \666,380 雑収入 \66,160 収入合計 項目 車両製作 支出 金額 \9,224,821 金額 \1,735,262 走行関連(交通費等) \282,885 チーム運営(運営費・備品) \623,141 工具 \137,448 技術養成費(講習会等) \179,393 大会費用(宿・交通費) \569,839 10 年度繰越金 \5,696,853 合計 \9,224,821 - 63 - 2010 Okayama University Formula Project 7. 2011 年度チームに関して 7.1. チーム運営 昨年は,マシンの設計に力を入れ,ポテンシャルの高い,速いマシンを手に入れました. 実際,デザイン審査でも 7 位という好成績を収めることができました. 一方で,マシントラブルが続き,セッティングを合わせる時間やドライバーの練習にあて る時間が足りませんでした.ということで,今年の大会の目標は,「動的競技で勝つ」とし, マシンからスケジュール,ドライバーまで一貫してプロジェクトを進めております.動的競 技というのは,マシンを走らせてタイムを競う競技でドライバーの腕やマシンのセッティン グや信頼性の影響が大きいです. 具体的には,まず「全競技完走」のためにマシンそのものの信頼性向上とともに早期シェ イクダウンを行います.次にタイム向上のために,セッティング能力発展・ドライバー練習 の確立を目指しています. 7.2. マシンコンセプト ~市販レーシングマシンとしての熟成化~ 私達,OUFPが掲げる’10 年度マシンコンセプトは,『基礎理論・設計の熟成化』でした. このコンセプトの下,各部設計を一から見直した設計を行い,結果的に’09年度より設計レベ ルは飛躍的に向上し,第8回大会のデザイン審査においては7位という高順位を獲得しまし た.しかし,’09年度マシンから全体的に大幅な設計変更を行ったため,それに伴い多くのパ ーツを製作することとなりました.新設計・新制作により設計・製作に多くの時間を割いて しまい,実走時間が確保できず,トラブルシュート,セッティング,ドライバー練習のため の時間が確保できない問題が発生し,大会の動的競技において散々な結果を残す事となって しまいました. そこで’11年度チーム方針を『走行時間の確保』とし,のマシンコンセプトは,チーム目標・ 方針に沿い,『市販レーシングマシンとしての熟成化』を掲げます.このコンセプトは,① 必ずゴール出来る絶対的信頼性の確保,②アマチュアドライバーでも負担の軽いインターフ ェイスの実装,の二つの意味を持ちます.これにより,第9回大会まで12ヶ月という短いス パンの中,可能な限り走行時間を確保した上で,各走行の質を上げることでマシン,ドライ バーともに大会に合わせた練習,調整を極めることで『動的で勝てるマシン』を作り上げま す. ~マシンコンセプト実現のために~ 少ないメンバーの中,チーム方針である『走行時間の確保』,マシンコンセプトである『市 販レーシングマシンとしての熟成化』を達成させるためには,設計・製作の時間を兎に角短 - 64 - 2010 Okayama University Formula Project くする必要があります.そのため昨年度のマシンをベースとした設計を行うことで,設計時 間の短縮化と設計担当者の負担の軽減を行います.大まかなパッケージングや仕様をそのま ま引き継ぎ,主要なパーツは設計,使用流用します.一方,問題点のあったパーツは実験, 計測により改善点を明確にした上で再設計を行います.また再設計を行うパーツの設計をチ ーム全員で共有,意見を出し合うことで,各セクションの繋がりを強くさせます.これらに より,さらに岡山大学産のレーシングマシンとして一貫性を持たせ, 『市販レーシングマシン としての熟成化』を図ります. またマシンだけでなく,ドライバーの育成にも力を入れており,常時シミュレータによる 練習,練習走行方法の見直しなど行い,レーシングドライバーとしてだけでなく,開発ドラ イバーとしての教育を徹底しています. また,昨年度多くのトラブルが出たエンジンは,エンジンベンチを製作し動力計でテスト することを予定しています.これにより,トラブルを解決するだけでなく,ターボチャージ ャー搭載エンジンの出力・効率のさらなる向上を狙っています. - 65 - 2010 Okayama University Formula Project 7.3. 2011 年度予算計画 2011 年度は次の表のように予算計画を立てております. 項目 収入 前年度繰越金 \5,659,607 スポンサー様支援金 \2,000,000 メンバー負担(11 人) \564,000 収入合計 項目 大会費用 支出 金額 \8,223,607 金額 \525,000 車両制作費 \2,000,000 走行関連費 \600,000 運営費 \700,000 企業訪問・技術養成費 ¥300,000 11 年度繰越金 \4,398,607 合計 \8,223,607 - 66 - 2010 Okayama University Formula Project 8. 2010 年度スポンサー様一覧 2010 年度お世話になりましたスポンサー様の一覧になります. この一年間,ご理解・ご応援してくださり誠にありがとうございました. ※順不同で記載しております. スポンサー名(敬称略) 住所 内山工業㈱ 岡山県岡山市江並 338 番地 川崎重工業㈱ 兵庫県明石市川崎町1番1号 (株)岡山国際サーキット 岡山県美作市滝宮 1210 三菱自動車工業㈱ 水島 支援内容 活動資金提供 エンジン,エンジン部品の提 供 走行場所の提供 カートの 割引使用 倉敷市水島海岸通一丁目1番地 ハブ支援 スズキ㈱ 静岡県磐田市駒場 4935 タービン支援 ㈱ブリヂストン 東京都小平市小川東町 3-1-1 タイヤの提供 AVO/MoTeC JAPAN 埼玉県さいたま市岩槻区釣上新田 1449-2 製品の割引提供 ㈱ミスミグループ本社 東京都江東区東陽 2-4-43 ミスミ製品の提供 大阪府大阪市西区京町堀 1 丁目 3 番 17 ベアリング,ドライブシャフト 号 支援 日信工業㈱ 長野県上田市国分 840 ブレーキ製品の無償提供 ソリッドワークス・ジャパン 東京都千代田区丸の内 1-8-2 第一鉄鋼 ㈱ ビル 3F テクノイル・ジャポン K.K. 神奈川県横浜市都筑区 東山田 4-34-12 エンジンオイル支援 ㈱東日製作所 東京都大田区大森北 2-2-12 トルクレンチの無償提供 製作所 NTN㈱ ㈱エフ・シー・シー 静岡県浜松市北区細江町中川 7000 番地 の 36 設計ソフトの無償提供 デファレンシャル提供 山陽レジン工業㈱ 岡山県岡山市藤田 239-19 型へのゲルコート吹き付け ㈲ケイマックススピード 岡山県倉敷市中畝 1 丁目 6-2 パワーチェック無償支援 FC デザイン㈱ ニッポンレンタカー中国㈱ 石原ラジエーター工業所 広島県安芸郡府中町本町 2-1-48 藤本ビ ル 1F カムセンサー支援 岡山県岡山市北区厚生町2-2-5(岡山 レンタカーを割引価格で提 営業所) 供 愛知県岡崎市末広町 12-5 ラジエター割引製作 - 67 - 2010 Okayama University Formula Project 三国工業㈱ 岡山県玉野市玉原 3 丁目 4 番 1 号 パイプの曲げ加工 エーモン工業㈱ 兵庫県神崎郡福崎町南田原 2077-1 製品無償提供 住鉱潤滑剤㈱ 新宿区西新宿 2-6-1 住友ビル 8 階 スミプレックス缶無償提供 ㈱レイズ 大阪府東大阪市長田西2-4-7 ホイールの提供 協和工業㈱ 愛知県大府市横根町坊主山 1-31 製品無償提供 プラスμ 仮 東京都杉並区宮前 5-24-3 フローティングピン支援 ラストラーダ 大阪府池田市住吉 2-3-17(大阪店) グローブ,シューズ無償提供 ㈱プロト 愛知県刈谷市井ヶ谷町桜島 5 ブレーキ関係の割引提供 岡山科学技術専門学校 岡山県岡山市北区高柳東町 7-15 カウル塗装 倉敷化工㈱ 岡山県倉敷市連島町矢柄四の町 4630 光学定盤支援 ㈱テイクオフ 大阪府大阪市都島区都島本通 1-22-15 タービンの割引提供 ㈱デンソー中国 岡山市青江 6-6-13 スパークプラグ支援 岡山県岡山市中区古京町 2-6-8 パーツクリーナ割引提供 アントライオン 大阪府和泉市浦田町 399 アクセルワイヤー支援 ウチヤマ化成 岡山県赤磐郡赤坂町多賀 128 発泡スチロール支援 ㈱日進機械 岡山営業所 岡山市大元2丁目8番14号大元第1ビル 発注代行 福島化工 岡山県岡山市福島 3 丁目 13-1 接着剤支援 ライドオン岡山((有)トレー ル) - 68 -
© Copyright 2026 Paperzz
![トップインサート[THタイプ]](http://s3.paperzz.com/store/data/005398382_1-436c7ba34e52e5f217e9245a27e40af5-250x500.png)