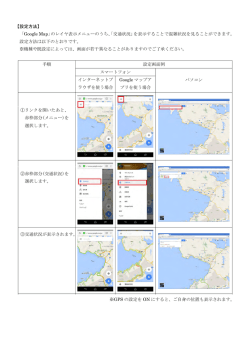
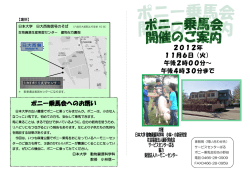
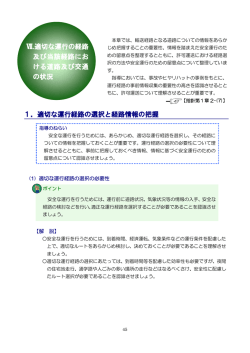
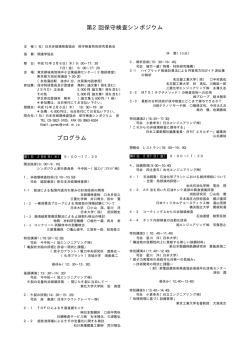
開発途上国における 開発途上国における混合交通下 における混合交通下の 混合交通下のオートバイ走行 オートバイ走行モデル 走行モデルの モデルの構築 1.はじめに 日本大学 学生員 ○石田 祐介 日本大学 正会員 福田 敦 日本大学 正会員 石坂 哲宏 日本大学大学院 学生員 岡村 誠 3.再現する 再現する交通状況 する交通状況 現在、開発途上国では急激な経済発展に伴い、オート タイ・バンコクで撮影した映像からオートバイが車両 バイの保有と利用の増加が進み、重要な交通手段となっ の間をすり抜けながら走行する状況を整理した結果とし てきている。混合交通下においてオートバイは車線に沿 て、シミュレーションモデルで再現すべき走行パターン って走行せず、車間の前後および側方をすり抜けて走行 を以下の4つのパターンに分類した。 している。このような走行特性が交通事故の要因となっ 走行① 四輪車が前方にいて通れない場合に、四輪車の ている。交通事故を減らすための施策としてオートバイ 専用レーンなどのオートバイの走行を整流化させるよう な施策が行われてきている。しかしながら、それらの交 通施策を行うためには、走行シミュレーションモデルを 構築して安全性の向上を定量的に表わし評価する必要が ある。 間を通り抜けていくパターン 走行② 前方に四輪車がいないとき、四輪車の間を通り 抜けていくパターン 走行③ 四輪車の間をすり抜けて走行し、もう一方の四 輪車の後方に追従するパターン 走行④ 沿道側の側方を通り抜けていくパターン そこで本研究では、混合交通下においてオートバイが 車両間をすり抜ける走行を再現することのできるオート バイの走行モデルを構築することを目的としている。 2.既存研究の 既存研究の整理 図-1 交通状況① 図-2 交通状況② 図-3 交通状況③ 図-4 交通状況④ 1) 兵藤ら は、混合交通下における交通状況の交通流や 交通渋滞の状態をミクロ交通シミュレーションにより解 析した。その結果、オートバイの存在が他の車両に大き な影響を与えていることを明らかにした。 内田ら 2)は、駐車車両を回避する行動で駐車車両への 抵抗感をポテンシャルとして、ポテンシャルと閾値を用 い対数正規分布の確率密度関数を定義している。 しかしながら、ポテンシャルモデルでは、回避する行 動ではない車両間のすり抜けやオートバイが車間を縫う ようにして走行する走行路の決定ができない。 そこで本研究は、車両間をすり抜ける走行を再現する ことのできる混合交通下における走行モデルを構築する ものとする。 図-5 タイ・バンコク キーワード オートバイ 混合交通 走行モデル 走行挙動 4.モデルの モデルの概要 連絡先 〒274-8501 (1)モデルの提案 千葉県船橋市習志野台 7-24-1 日本大学理工学部社会交通工学科 交通システム研究室 オートバイのすり抜け及び合間を縫った走行は、車 TEL: 047-469-5355 間に起因して走行挙動を変化させている。オートバイは E-mail: [email protected] 車間の側方間隔によって通り抜けられるかどうかが変わ り、車間幅員によって車両の後方に入り込めるかどうか 輪車のいない最小値の薄い色の部分を検索しながら進む が決まってくる。 ものとしている。 そこで本研究では、オートバイは、車間および側方間 隔に起因して走行挙動を変化させていると仮定する。衝 突を回避しようと安全な位置を走行するものとし、内田 たちと同様な考え方に基づきポテンシャルと閾値を定義 する。ただし、2次元で表わすものとしてポテンシャル の大きさを等高線で作成して表わす。最も低い部分が最 も安全であるとし、低い部分にオートバイが移動するモ デルを構築する。 図-7 走行シミュレーションモデル (2)モデルの表現方法 図-1ではモデルを構築する上での考え方を表したも のである。車間に線を引き、そこをA-A‘断面とし、式 (1)と式(2)で示し対数曲線で表す。二つの対数曲 線の和を式(3)で示し、図のようなグラフで表す。車 両の密度の一番低いところをオートバイが走行するとい った走行シミュレーションモデルを構築した。 図-8 走行密度図 (1) (2) (3) (4)各走行状況の頻度 乗用車やオートバイの量によって各走行状況の頻度回 数が変わってくる。それによって各パラメータが変化し、 空間に入り込む 正確なパラメータを設定することができる。それによっ A 側方間隔 て、正確な走行シミュレーションモデルを構築すること ができる。 A’ 車間 5.おわりに 図-6 モデルの考え方① 本研究では、安全性の向上を定量的に表し評価する必 要があることから走行シミュレーションモデルを構築し た。そして、オートバイが車間に起因して走行挙動を変 化させているというモデルを構築した。今後の課題とし て、ビデオ解析をする上でどのようなデータが必要なの かを示し、オートバイの走行特性を明らかにする。また 図-7 モデルの考え方② 開発途上国における交通事故の解決につなげていく。 (3)走行シミュレーションモデルについて 図-7では、オートバイが等高線の最も低く、通りや 参考文献 すいところを検索しながら走行するようなモデルを示し 1)兵頭哲郎:画像処理および交通マイクロシミュレーシ ている。 ョンを用いたバイク主体の混合交通の挙動分析,第 24 回 図-8では、四輪車が存在しているところの高さを0 交通工学研究発表会論文報告集,p61-64,2004 年 として、何も存在していない部分を-1とした時、四輪 2)内田敬:二輪車走行挙動の記述を目的としたポテンシ 車がいるような高い部分を濃い色で示し、何も存在して ャルモデルの提案,土木計画学研究・講演集 vol30,page いない低い部分を薄い色で表現した。オートバイは、四 XI(pp.254-258) ,2004 年
© Copyright 2026 Paperzz