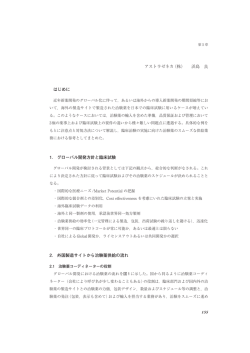
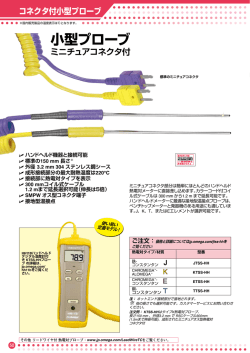
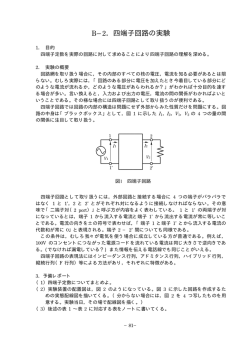
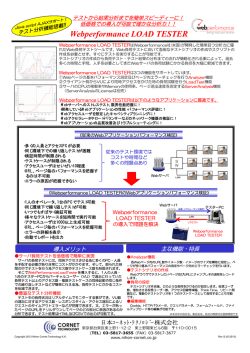
潮流および角速度情報を用いた TCSC 制御 E95047 菅沼 弘史 指導教員 藤田 吾郎 似的に計算することができる。図 1 の∆xV は TCSC のインピーダンスの変化というパラメータに対応 している。また,PVSrC∆xV は TCSC を流れる有効 電力潮流である。なお,線形直流回路の補償によ り,TCSC を PVSrC∆xV の等価電源で置き換えてい る。図 1 の等価回路より,TCSC に対する感度係 数(∆ Pei /∆xV)は,発電機の内部状態にかかわらず, TCSC を流れる有効電力潮流と系統構成によって 決まる定数の積となる。また,重ねあわせの理よ り,複数の TCSC が系統内にある場合については, 各発電機の出力変化は,個々の機器のパラメータ 変化に対して計算した出力変化の和となる。 以上から,TCSC に対する制御系として,図 2 が導かれる。ただし,同図において,TCSC は一 次遅れの伝達関数で模擬している。また,同図に おいて,直列コンデンサに対する各発電機のゲイ ン Ki としては,定常状態に対して計算した感度係 数( σ ik)を用いる [3] 。 1. 研 究 背 景 この数十年において,電力の需要は増え続け, また,今後も堅調に伸びていくと予想されている。 その一方で,電力会社における発送電設備の用地 確保は困難になってきている。そのため,連系強 化や長距離送電が行われるが,安定度の低下や, 併行線路のループ潮流の増加により系統運用上の 送電限界があり,増大する需要に対して余力をも った設備を確保することが難しくなっている。ま た,サイリスタ制御機器が直流送電などで実用化 されている点などの技術的背景もあり,1988 年に アメリカの EPRI (Electric Power Research Institute) の Narain G. Hingorani 氏より FACTS (Flexible AC Transmission System:フレキシブル交流送電系統)が 提唱され,研究が進んでいる [1][2] 。FACTS によっ て,送電電力の調整,安定度の向上,低コスト化, 低ロス化などが期待されている。 FACTS には,直列コンデンサ(TCSC),移相器, SVC(実用化済)などの種類があるが,本論文では, 直列コンデンサのインピーダンスを,ほぼ連続的 かつ,高速に制御できることを前提として,系統 の安定度の強化を計ることができるか試算を行っ た。 ΔPe1 G1 ΔPe2 直列コンデンサ 送電網 G2 PVSrCΔxV ΔPen Gn 2. 理 論 図1 <2・1> 感度係数の推定 各発電機の角速度偏差 に感度係数( σ ik)を乗じて,これを機器に対する制 御入力とすることにより,安定化制御を可能にす る。感度係数( σ ik)は系統のパラメータの変化に対 する,i 番目の発電機出力 Pei の変化の感度であり, σ ik TCSC のインピーダンス変化による等価回路 ω0 ω1 ∂P = ei ∂ηk ω2 と定義される。一般にこの感度係数はすべての発 電機状態変数の関数となるので,過渡動揺時には その値が時間とともに変化することになる。 <2・2> TCSC の挿入 発電機電気出力の変化は, 図 1 の等価線形直流回路を流れるフローとして近 ωn + + + PVSrC K1 + + + K 2 K n 図2 1 Σ 制御系 直列コンデンサ kV 1+TVs μ Δxv 3. 検 討 事 項 0.7 前章で導いた制御系の構成法を,TCSC の制御系 に適用した場合の効果を MATLAB を用いてシミ ュレーションする。モデルは図 3 の 3 機 9 母線系 統を使用した。その時定数 TV は 0.2 秒とした。ま た,感度係数は表 1 の数値を使用し,発電機定数 および発電機制御系の定数については文献[4]の数 値を使用した。 <3・1> TCSC による効果 図 3 に示した系統の A 地点において地絡故障が発生し,一回線開放に よって 0.1 秒後に除去した場合について,シミュ レーションを行った結果を図 4 に示した。この図 から,TCSC の制御を行うことで第一波動揺が抑 制され,系統が安定になることがわかる。 <3・2> TCSC と故障位置の関係の比較 図 3 に示 した系統において,TCSC をいずれか 1 つを制御 し,前項と同様の故障が発生した場合について, シミュレーションを行った結果を図 5 に示した。 同様のシミュレーションを多数行ったが,いずれ も,故障位置に近い地点にある TCSC が系統を一 番安定させることがわかった。 0.6 0.5 omega[Hz] 0.4 0 -0.1 -0.2 G2 2 8 18/230 230/13.8 0.032+j0.161 B/2=j0.179 5 Load A omega[Hz] 3 6 B/2=j0.079 j0.0576 K1 2 0.2 0 0.5 1 1.5 2 文 1 [1] [2] 表1 3 機系統モデル 直列コンデンサの制御系パラメータ TCSC1 TCSC2 TCSC3 0.0275 -0.0269 -0.0055 K2 -0.002 0.0009 -0.0028 K3 -0.0052 -0.0005 0.0013 KV 4.444 16.667 15.0 5 4 2.5 time[s] 3 3.5 4 4.5 5 シミュレーションの結果,直列コンデンサを制御 することにより,系統が安定する。また,故障地 点に近いほど効果が発揮される。ただし,ある程 度,位置が離れてしまうと効果の差は現れない。 したがって,効率的に TCSC を配置することによ り,かなりの効果が期待できると思われる。今後 もさらにシミュレーションを重ね,効果を検証し ていきたい。 G1 図3 4.5 4. む す び 230kV 16.5kV 4 1:制御なし,2:TCSC1 のみ制御, 3:TCSC2 のみ制御,4:TCSC3 のみ制御 図 5 TCSC と故障位置の関係の比較 4 16.5/230 3.5 1 0.3 -0.1 0.017+j0.092 0.010+j0.085 3 3 Load B B/2=j0.088 2.5 time[s] 0 TCSC3 故障発生地点 D 2 0.1 0.039+j0.170 B/2=j0.153 1.5 0.4 9 TCSC2 1 0.5 G3 B/2=j0.1045 0.5 0.6 TCSC1 0.0119+j0.1008 B/2=j0.0745 0 実線:制御なし,点線:制御あり 図 4 TCSC による効果 (発電機 G1) 230kV j0.0586 13.8kV 0.0085+j0.072 0.2 0.1 Load C 1 8kV j0.0625 230kV 0.3 [3] [4] 2 献 栗田篤,『米国電力研究所の FACTS 構想』,電力中 央研究所報告,T92020,電力中央研究所 (1993-3) 藤田吾郎・P.K.GOSWAMI・横山隆一・白井五郎, 「ローカル潮流情報に基づく TCSC 制御」,電気学会 電力・エネルギー部門誌(B),Vol.118-B, No.6 (19986) 岡本浩・横山明彦・関根泰次,「可変インピーダンス 型電力系統の安定化制御手法とその可変直列コンデン サ補償系統への応用」,電気学会電力・エネルギー部 門誌(B),Vol.113-B, No.3 (1993-3) P. M.ANDERSON,A.A.FOUAD, ”Power System Control and Stability”, pp.36-45 , IEEE PRESS (1993) 3
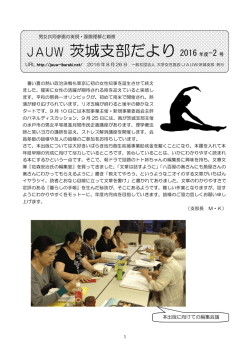
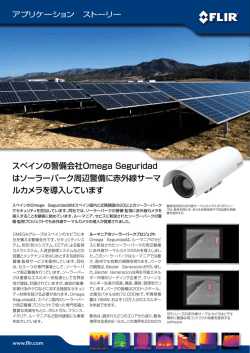
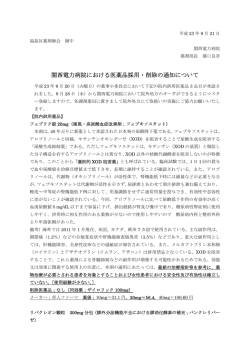
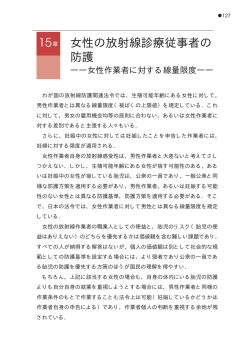
© Copyright 2026 Paperzz