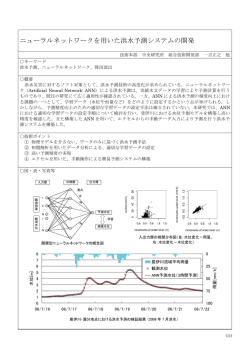
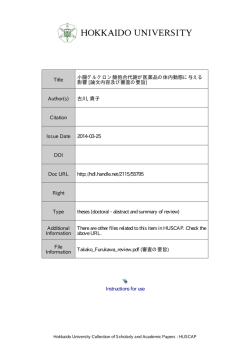
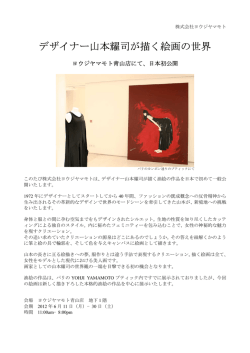
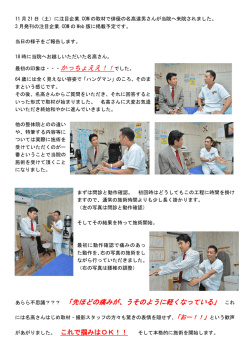
次世代ゲーム開発に向けたキャラクタの動作自動生成 山本雅人 (北海道大学大学院情報科学研究科・准教授) 1. はじめに 本研究では,3 次元空間を仮想的に実現したゲームの世界において今後必要とされるであ ろう,物理法則に従ったキャラクタのよりリアルで自然な動作を自動生成するための技術開 発を行うこと目的とする.3次元でモデル化したキャラクタは,関節をコントロールする人 工ニューラルネットワークの結合重みを進化型計算によって最適化することで,よりリアル で自然な動作を自動的に生成可能となる.従来は,リアルな動作を実現するためにモーショ ンキャプチャ技術を用いているが,この技術は必要とする装置も大きく,時間とコストがか かっていた.本研究の成果により,キャラクタの動作の自動生成がより容易で安価となるこ とが予想される. 2. キャラクタのモデリングと仮想環境 図1に本研究で対象とする仮想生物キャラクタの例を示す.これらのキャラクタは実際の 生物と同じように手足に関節をもち,各関節にはアクチュエータを埋め込んでいるため,可 動域の範囲で自律的に動かすことが可能である. 図 1 コガネムシ(左),サラマンダー(中央),アゲハチョウ(右)のモデル 各関節を動かすためのコントローラとして人工ニューラルネットワーク(ANN)を採用して おり,仮想環境からの状況をセンサによって取得して ANN への入力とし,各関節角度の変 化量を出力とする.したがって,ANN の結合重みを与えれば,仮想生物キャラクタは,仮想 環境の中を自身の関節角度を随時変化させることで行動することが可能となる. また,仮想生物キャラクタの行動によって生じる床面との摩擦や,空気抵抗,自身の部位 の衝突などによる影響は物理法則に従い,物理エンジンや本研究で開発した高速シミュレー ションによって計算され,実際の仮想生物キャラクタの振る舞いが決定される. 3. キャラクタの動作自動生成 上記のように仮想生物キャラクタと仮想環境が与えられると,キャラクタの ANN コント ローラの結合重みの違いにより,キャラクタは様々な振る舞いをする.この振る舞いについ て外部から評価を与える.例えば,より早く遠くへ移動しているキャラクタのコントローラ にはより良い評価値を与える,などとあらかじめ決定しておいた評価基準にもとづき評価値 を求める.一つのキャラクタのコントローラの結合重みを並べたものを一個体と考えて,遺 伝的アルゴリズム(Genetic Algorithm: GA)を適用すると,はじめはランダムな結合重みが与 えられているため,デタラメな行動をするキャラクタばかりであるが,進化が進むにつれて, より適切に関節を動かして歩行や遊泳をするキャラクタが自動生成される.図 2 はサラマン ダーロボットが陸上での歩行行動と水中での遊泳行動を自動生成した結果を示した.また, より複雑な行動生成には,ANN を階層的に構成すると効率的であることを示した. 図 2 陸上で歩行をする行動(左)と水中で遊泳する行動(右)を獲得したサラマンダー 研究業績 [1] 大江 亮介, 鈴木 育男, 山本 雅人, 古川 正志, 流体中の運動計算のための物理シミュレーション 環境—粒子群最適化によるダ・ヴィンチ型螺旋翼の形状決定−, 精密工学会誌, 第 78 巻, 第 4 号, pp. 348-353 (2012) [2] Kenji Iwadate, Ikuo Suzuki, Masahito Yamamoto, Masashi Furukawa, Behavior Emergence of Virtual Creature Living in Complex Environments, Artificial Life and Robotics, Vol. 16, No. 2, pp. 185-189 (2011) [3] Kenji Iwadate, Ikuo Suzuki, Masahito Yamamoto, Masashi Furukawa, Evolving Amphibian Behavior in Complex Environment, Advances in Artifical Life: 10th European Conference, ECAL 2009 Revised Selected Papers, Lecture Notes in Artificial Intelligence, No. 5777, pp. 107-114 (2011) [4] Keita Nakamura, Ikuo Suzuki, Masahito Yamamoto, Masashi Furukawa, Acquisition of Swimming Behavior on Artificial Creature in Virtual Water Environment, Advances in Artificial Life: 10th European Conference, ECAL 2009 Revised Selected Papers, Lecture Notes in Artificial Intelligence, No. 5777, pp. 99-106 (2011) [5] Masashi Furukawa, Makoto Morinaga, Ryosuke Ooe, Michiko Watanabe, Ikuo Suzuki, Masahito Yamamoto, “Behavior Composed” for Artificial Flying Creature, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol. 15, No. 7, pp. 838-845 (2011) [6] 米陀 佳祐, 鈴木 育男, 山本 雅人, 古川 正志, 複合型ビヘイビアによる円環構造弾性ロボットの 自律行動獲得, 精密工学会誌, 第 77 巻, 第 5 号, pp. 476-482 (2011)
© Copyright 2026 Paperzz