Nikolaos Bekiaris-Liberis1 e-mail: [email protected] Miroslav Krstic e-mail: [email protected] Department of Mechanical and Aerospace Engineering, University of California, San Diego, CA 92093-0411 1 Compensation of Time-Varying Input and State Delays for Nonlinear Systems We consider general nonlinear systems with time-varying input and state delays for which we design predictor-based feedback controllers. Based on a time-varying infinitedimensional backstepping transformation that we introduce, our controller achieves global asymptotic stability in the presence of a time-varying input delay, which is proved with the aid of a strict Lyapunov function that we construct. Then, we “backstep” one time-varying integrator and we design a globally stabilizing controller for nonlinear strict-feedback systems with time-varying delays on the virtual inputs. The main challenge in this case is the construction of the backstepping transformations since the predictors for different states use different prediction windows. Our designs are illustrated by three numerical examples, including unicycle stabilization. [DOI: 10.1115/1.4005278] Introduction Ignoring the effect of a time-varying state or input delay can have catastrophic consequences to a system [1]. Moreover, timevarying delays are present in numerous real-world applications. Successful application of various control design methods to networked control systems is constrained by the presence of timevarying input delays [2–5]. Time-varying delays appear also in supply networks, [6] and [7] and irrigation channels [8]. Last but not least, the reaction time of a driver varies over time [9,10], and hence, can be modeled as a time-varying input delay. Several existing techniques for compensating constant input delays in linear plants, such as [11–17], are extensions of the “Smith Predictor” [18]. Extensions of these designs to linear systems with simultaneous input and state delay also exist [19–22]. In addition, predictor-based adaptive schemes for both unknown plant parameters [23,24] and delays [25–27] are available. Control techniques for nonlinear systems with input [28–30] or state delays [31–35] are recently developed. Although numerous results deal with plants with constant input delays, the problem of compensation of time-varying input delays, even for linear systems, is tackled in only a few references [11,36–38]. Even more rare are papers that deal with the compensation of a time-varying input delay in nonlinear systems [33]. In this paper, we continue the efforts on the compensation of input delays for nonlinear systems, initiated at Ref. [28] for constant delays, to the case of timevarying input delays. We also extend the results from Ref. [19] in two major directions: (1) In contrast with the result from Ref. [19], we consider here nonlinear plants and (2) we are dealing with time-varying instead of constant delays. These extensions are not trivial, since for nonlinear systems with time-varying input and state delays the definition of the predictor states, as well as the form of the control law, does not follow in an obvious way from the delay-free plant. We introduce a methodology for compensating time-varying state or input delays for nonlinear systems. The assumptions that we make for the case of nonlinear plants with time-varying input delay are rather plausible: We assume that the systems under consideration are forward complete, that is to say, they cannot escape to infinity in finite time. We also assume that our plant can be asymptotically stabilized by a (possibly time-varying) control law in the absence of the delay. Based on these assumptions and by using a backstepping transformation we construct a predictorbased compensator. Our design achieves asymptotic stability which is proved using a Lyapunov functional that we construct. Then, we “backstep” one time-varying integrator and we consider nonlinear systems in the strict-feedback form with a chain of time-varying integrators. We employ an infinite-dimensional backstepping procedure and we derive a control law that uses the predicted values of the states on different predicted intervals for each state. We consider the second order case but the result can be extended recursively to the general nth-order strict-feedback class with delays in the integrator chain as well as delays on other states in the system. Finally, we illustrate our design with three numerical examples. A second order strict-feedforward system with time-varying input delay, unicycle stabilization subject to a timevarying input delay and a second order strict-feedback system with time-varying state delay. In Sec. 2 we introduce a predictor-based delay compensation design for general stabilizable nonlinear systems. In Sec. 3 we analyze the stability properties of the closed-loop system. We extend our design methodology to the case of strict-feedback systems with time-varying delayed integrators in Sec. 4. Finally, in Sec. 5 we demonstrate our design with two numerical examples. Notation: For a function rðx; tÞ : ½0; 1 ½0; 1Þ7!R, we denote its derivative with respect to x with rx(x,t) and its derivative with respect to t as rt(x,t). 2 Problem Formulation and Controller Design We consider the following nonlinear system with time-varying input delay _ ¼ f ðXðtÞ; Uðt DðtÞÞÞ XðtÞ (1) where X 2 Rn , U 2 R, t 2 Rþ and f: f : C1 ðRn R; Rn Þ with f(0,0) ¼ 0. Throughout the paper we make the following assumptions concerning the plant (1): Assumption 1. The plant X_ ¼ f ðX; xÞ is strongly forward complete, that is, there exists a smooth positive definite function R and class K1 functions d1, d2, and d3 such that the following holds 1 Corresponding author. Contributed by the Dynamic Systems Division of ASME for publication in the JOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscript received March 21, 2011; final manuscript received August 10, 2011; published online December 2, 2011. Assoc. Editor: Marcio de Queiroz. Journal of Dynamic Systems, Measurement, and Control C 2012 by ASME Copyright V d1 ðj XjÞ Rð XÞ d2 ðj XjÞ (2) @Rð XÞ f ðX; xÞ Rð XÞ þ d3 ðjxjÞ @X (3) JANUARY 2012, Vol. 134 / 011009-1 for all X 2 Rn and for all x 2 R. Assumption 1 guarantees that system (1) does not exhibit finite escape time, i.e., for every initial condition and every bounded input signal the corresponding solution is defined for all t 0, i.e., the maximal interval of existence is Tmax ¼ 1. The definition of forward-completeness is the one from [39]. Assumption 2. There exists a feedback law j 2 C1 _ ¼ f ðXðtÞ; jðt; XðtÞÞ þ xðtÞÞ ðRþ Rn ; RÞ such that the plant XðtÞ satisfies the uniform in time input-to-state stability property with respect to x and the function j is uniformly bounded with respect to its first argument, that is, there exists a class K1 function q^ such that jjðt; nÞj q^ðjnjÞ; for all t 0 (4) Naturally, the time-varying delay should be uniformly bounded and positive, and hence, there must exist a positive constant m such that m > D(t) > 0 for all t 0. As it turns out later on, our predictor-based compensator makes use of the inverse of the function /ðtÞ ¼ t DðtÞ (5) namely /1(t). Hence, we have to impose certain conditions on /0 (t) that guarantee the invertibility of /(t). We make the following assumptions regarding the function /(t): Assumption 3. The function /(t) ¼ t D(t) satisfies for all t 0 /ðtÞ < t; (6) and 1 >0 suph/1 ð0Þ ðh /ðhÞÞ p0 ¼ for h ¼ t. The initial condition of Eq. (11) is given for t ¼ 0 as PðhÞ ¼ for all p1 1 t0 suph/1 ð0Þ /0 ðhÞ > 0: UðtÞ ¼ j /1 ðtÞ; PðtÞ (9) (10) where P(t) is given from ðhÞt ð /1 1 / ðtÞt f P / t þ y /1 ðtÞ t PðhÞ ¼ / ðtÞ t 0 U / t þ y /1 ðtÞ t dy þ XðtÞ ðh dr ¼ f ðPðrÞ; U ðrÞÞ 0 1 þ XðtÞ; /ðtÞ h t / / ðrÞ /ðtÞ 1 (11) 011009-2 / Vol. 134, JANUARY 2012 h 2 ½/ð0Þ; 0 (12) For an implementation of the controller (10) one has to numerically integrate the finite intervals in Eqs. (11) and (12) using one of the numerical quadratures. In our simulations, we use the composite left-endpoint rectangle rule. Note that the interval of integration, i.e., the interval t /(t) ¼ D(t), at each time step may not be an integer multiple of the discretization step h. In this case, the total number of points that are used in the computation of the integral are derived by rounding the number ðt /ðtÞÞ=h to the nearest integer from below. However, the study of the complexity of the algorithm in an actual implementation is beyond the scope of this paper which concentrates in basic continuous-time designs. The quantity P(t) given in (predictor) is the /1(t) t time units ahead predictor of X(t), which can be seen as follows: Differentiating relation (predictor) with respect to h, setting h ¼ t and performing a change of variables s ¼ /1(t) in the ODE for X(s) given in Eq. (1) (where t is replaced by s), one observes that P(t) satisfies the same ODE in t as X(/1(t)). Since from Eq. (12) it follows that P(/(0)) ¼ X(0), we have that P(0) ¼ X(/1(0)). Hence, indeed P(t) ¼ X(/1(t)) for all t 0. The choice of (predictor) becomes clear by considering the case where the input delay is constant, of length, say, D. In this case the predictor that corresponds to (predictor) is Pc ðtÞ ¼ D ðt ¼ (8) The delay time D(t) has to be positive for all t 0 (in order to guarantee casualty of the plant) which is guaranteed with condition (6) (note that t / (t) ¼ D(t)) in assumption 3. Moreover, relation (7) guarantees that D(t) is uniformly bounded from above which implies that the control signal eventually reaches the plant. Relation (8) (or equivalently ðdDðtÞÞ=ðdtÞ < 1) in assumption 4 guarantees that there exists a time at which the controller kicks-in (i.e., there exists a solution to the equation /(t) ¼ 0) and the bound (9) guarantees that ðdDðtÞÞ=ðdtÞ is bounded from below. The controller for the plant (1) that compensates the timevarying input delay and achieves global asymptotic stability of the closed-loop system is given by dr þ Xð0Þ / /1 ðrÞ 0 (7) and it holds that ¼ f ðPðrÞ; U ðrÞÞ /ð0Þ for all Assumption 4. The derivative of the function /(t) satisfies /0 ðtÞ > 0; ðh ð1 f ðPc ðt þ Dðy 1ÞÞ; U ðt þ Dðy 1ÞÞÞdy þ XðtÞ 0 f ðPc ðhÞ; U ðhÞÞdh þ XðtÞ (13) tD The signal Pc(t) in Eq. (13) is the D time units ahead predictor of X(t) (see also Ref. [28]), i.e., Pc(t) ¼ X(t þ D) for all t 0. The relationship between (predictor) and Eq. (13) can be explained as follows: Let us define the predictor time in the case of a timevarying delay as /1(t) t, which is uniformly bounded based on relation (9). Analogously, for the case of a constant delay define the predictor time as /1 c ðtÞ t which of course equals D. One can now re-write Eq. (13) by substituting D with /1 c ðtÞ t as Pc ðtÞ ¼ D ð1 f ðPc ðtþDðy1ÞÞ;U ðtþDðy1ÞÞÞdyþXðtÞ ð 1 ¼ /1 ðtÞt f ðPc ðtþDðy1ÞÞ;U ðtþDðy1ÞÞÞdyþXðtÞ c 0 0 (14) This is the exact analog of relation (predictor) for the constant delay case. Moreover, the choice of the function /(t þ y(/1(t) t)) inside the integral in equation (predictor) is guided by the choice of an appropriate state, namely U(/(t þ y(/1(t) t))) for all y 2 ½0; 1, for the infinite-dimensional state of the actuator that also makes U(/(t þ y(/1(t) t))) equal to U(t) in the case where y ¼ 1 and equal to U(/(t)) in the case where y ¼ 0. 3 Stability Analysis In this section we prove the following result: Theorem 1. Consider the system (1) together with the control law (10)–(12). Under assumptions 1–4 there exists a class KL function a such that the following holds Transactions of the ASME ! jXðtÞj þ sup jUðhÞj a jXð0Þj þ /ðtÞht sup jUðhÞj; t ; t0 /ð0Þh0 (15) We prove the above theorem using a series of technical lemmas. We first introduce an equivalent representation of the plant (1) using a transport partial differential equation (PDE) representation for the actuator state as _ ¼ f ðXðtÞ; XðtÞ uð0; tÞÞ ut ðx; tÞ ¼ pðx; tÞux ðx; tÞ; pðx; tÞpx ðx; tÞ ¼ /1 ðtÞ t pðx; tÞf ðpðx; tÞ; uðx; tÞÞ ð x d ðpðy; tÞf ðpðy; tÞ; uðy; tÞÞÞ dy ¼ /1 ðtÞ t dy 0 1 þ / ðtÞ t pð0; tÞf ðpð0; tÞ; uð0; tÞÞ ð x ¼ /1 ðtÞ t py ðy; tÞf ðpðy; tÞ; uðy; tÞÞdy 0 þ /1 ðtÞ t (16) x 2 ½0; 1 ðx pðy; tÞ @f ðpðy; tÞ; uðy; tÞÞ py ðy; tÞdy @pðy; tÞ pðy; tÞ @f ðpðy; tÞ; uðy; tÞÞ uy ðy; tÞdy @uðy; tÞ 0 (17) uð1; tÞ ¼ UðtÞ 1 þ / ðtÞ t (18) ðx 0 þ /1 ðtÞ t pð0; tÞf ðpð0; tÞ; uð0; tÞÞ where 1þx pðx; tÞ ¼ 1 d / ðtÞ 1 dt (27) ! Comparing Eq. (26) with Eq. (27) and using the facts that (19) /1 ðtÞ t and /(t) is defined in Eq. (5). The choice of the transport speed p(x,t) is guided by the fact that we seek a representation for the infinitedimensional actuator state u(x,t) such that relations (18) and uð0; tÞ ¼ Uð/ðtÞÞ (20) are satisfied. One can verify that u(x,t) is given by uðx; tÞ ¼ U / t þ x /1 ðtÞ t (21) and consequently both Eqs. (18) and (20) are satisfied. We give first an alternative proof of the fact that P(t) is the /1(t) t time units ahead predictor of X(t), based on the PDE representation (16)–(18). Lemma 1. The signal P(t) in Eq. (11) is the /1(t) t time units ahead predictor of X(t), i.e., it holds that PðtÞ ¼ Xð/1 ðtÞÞ; for all t 0 (22) 1 pð0; tÞ ¼ 1 / ðtÞ t which follow from the definition of p(x,t) in Eq. (19) we get that ð x @f ðpðy; tÞ; uðy; tÞÞ pt ðx; tÞ pðx; tÞpx ðx; tÞ ¼ /1 ðtÞ t ðpt ðy; tÞ @pðy; tÞ 0 pðy; tÞpy ðy; tÞÞdy (28) Define now the function G(x,t) ¼ pt(x,t)p(x,t)px(x,t), which satisfies ð1 f ðpðy; tÞ; uðy; tÞÞdy þ XðtÞ (23) where pðx; tÞ ¼ /1 ðtÞ t ðx f ðpðy; tÞ; uðy; tÞÞdy þ XðtÞ; Gð0; tÞ ¼ 0 (30) (24) x 2 ½0; 1 0 (25) Differentiating the above relation with respect to time and using Eq. (17) we get that ð 1 x @f ðpðy; tÞ;uðy; tÞÞ pt ðx; tÞ ¼ / ðtÞ t pt ðy; tÞ @pðy; tÞ 0 ðx @f ðpðy; tÞ; uðy; tÞÞ pðy;tÞuy ðy; tÞdy þ /1 ðtÞ t @uðy; tÞ 0 1 ðx d/ ðtÞ þ 1 f ðpðy;tÞ; uðy; tÞÞdy þ f ðpð0;tÞ; uð0; tÞÞ dt 0 (26) Moreover, differentiating (25) with respect to the spatial variable x we have Journal of Dynamic Systems, Measurement, and Control for all x 2 ½0; 1 (31) Using the above relation and by defining p(1,t) ¼ P(t), we get Eqs. (23) and (24). Moreover, since from Eq. (25) it holds that p(0,t) ¼ X(t), using relation (24) we get Eq. (22). We next transform our original system given in Eqs. (16)–(18) to the “target system” which we prove later on to be globally asymptotically stable. Lemma 2. The infinite-dimensional transformation of the actuator state defined by Proof. Consider (29) pt ðx; tÞ ¼ pðx; tÞpx ðx; tÞ; 0 pðx; tÞ ¼ P / t þ x /1 ðtÞ t @f ðpðx; tÞ; uðx; tÞÞ Gðx; tÞ Gx ðx; tÞ ¼ /1 ðtÞ t @pðx; tÞ Hence, G(x,t) ¼ 0, for all x 2 ½0; 1. Equivalently, Furthermore, an equivalent representation for P(t) is as pð1; tÞ ¼ /1 ðtÞ t d/1 ðtÞ 1 dt and px ðx; tÞ ¼ 1 / ðtÞ t wðx; tÞ ¼ uðx; tÞ jðrðx; tÞ; pðx; tÞÞ (32) rðx; tÞ ¼ t þ x /1 ðtÞ t (33) where together with the control law given in Eq. (10) transforms the system (16)–(18) to the “target system” given by _ ¼ f ðXðtÞ; jðt; XðtÞÞ þ wð0; tÞÞ XðtÞ wt ðx; tÞ ¼ pðx; tÞwx ðx; tÞ; x 2 ½0; 1 wð1; tÞ ¼ 0 (34) (35) (36) Proof. We first point out that r(x,t) in Eq. (33) satisfies rt ðx; tÞ ¼ pðx; tÞrx ðx; tÞ (37) rð0; tÞ ¼ t (38) JANUARY 2012, Vol. 134 / 011009-3 From Eq. (32) and by using the chain rule together with relations (17), (31), and (37) we get Eq. (35). Using Eqs. (32) and (33) for x ¼ 0 and x ¼ 1 together with Eq. (10) we arrive at Eqs. (34) and (36). We now define the inverse of the transformation (32). Lemma 3. The inverse of the infinite-dimensional transformation defined in Eq. (32) is given by uðx; tÞ ¼ wðx; tÞ þ jðrðx; tÞ; nðx; tÞÞ _ c3 ðjXðtÞjÞ þ c4 ðjwð0; tÞjÞ 2c4 ðLðtÞÞ. Using the have VðtÞ fact that c4 ðjwð0; tÞjÞ c4 supx2½0;1 jecx wðx; tÞj ¼ c4 ðLðtÞÞ, we _ c3 ðjXðtÞjÞ c4 ðLðtÞÞ. Using Eq. (43), the definition get VðtÞ of L(t) in Eqs. (45) and (47) we conclude that there exists a class K function c5 such that _ c5 ðVðtÞÞ VðtÞ where n(x,t) is defined as ð x f ðnðy;tÞ;jðrðy;tÞ;nðy;tÞÞ þ wðy;tÞÞdy þ XðtÞ nðx;tÞ ¼ /1 ðtÞ t Consequently, using the comparison principle and Lemma 4.4 in [41] we can conclude that there exist a class KL function b1 such that VðtÞ b1 ðVð0Þ; tÞ 0 (40) Proof. We first point out that n(x,t) is for the closed-loop system (34)–(36), what p(x,t) is for system (16)–(18). Although nðx; tÞ ¼ pðx; tÞ; x 2 ½0; 1 for all (41) n(x,t) is driven by the transformed input w(x,t), whereas p(x,t) is driven by the input u(x,t). In other words, the direct transformation is defined as ðXðtÞ; uðx; tÞÞ7!ðXðtÞ; wðx; tÞÞ and is given in Eq. (32), where p(x,t) is given as a function of X(t) and u(x,t) through relation (25). Analogously, the inverse transformation is defined as ðXðtÞ; wðx; tÞÞ7!ðXðtÞ; uðx; tÞÞ and is given in Eq. (39) where n(x,t) is given as a function of X(t) and w(x,t) through relation (40). We prove next stability of the “target system” (34)–(36). Lemma 4. There exist a KL class function b such that ! jXðtÞj þ sup jWðhÞj b jXð0Þj þ /ðtÞht sup jWðhÞj; t ; jXðtÞj þ LðtÞ b2 ðjXðtÞj þ Lð0Þ; tÞ sup jwðx; tÞj LðtÞ ec sup jwðx; tÞj x2½0;1 @SðXðtÞÞ f ðXðtÞ; jðt; XðtÞÞ þ wð0; tÞÞ c3 ðjXðtÞjÞ þ c4 ðjwð0; tÞjÞ @XðtÞ (44) Define now the solution of the transport PDE (35)–(36) as wðx; tÞ ¼ W / t þ x /1 ðtÞ t Then combining Eqs. (51) and (52) we get sup jWðhÞj LðtÞ Lð0Þ ec (54) Combining Eqs. (50), (53), and (54) the lemma is proved for some class KL function b. The following two lemmas allows one to establish stability in the original variables. Lemma 5. There exist a class K1 function q1 such that ! sup jpðx; tÞj q1 jXðtÞj þ sup juðx; tÞj ; x2½0;1 1=ð2nÞ e2ncx w2n ðx; tÞdx t0 (55) x2½0;1 (45) Following the calculations in Ref. [28] and in Ref. [36] one concludes that _ cp0 min 1; p1 LðtÞ (46) LðtÞ Consider now the following Lyapunov function for system (34)–(36) which is positive definite and radially unbounded 2 cp0 min 1; p1 ð LðtÞ 0 c4 ðr Þ dr r (47) Taking the time derivative of V(t) along the solutions of the “target system” Eqs. (34)–(36) and using Eqs. (44) and (46) we 011009-4 / Vol. 134, JANUARY 2012 (56) with l being a positive constant. With a time rescaling, namely t ¼ ls , we get 0 VðtÞ ¼ SðXðtÞÞ þ sup jWðhÞj h2½/ð0Þ;0 _ YðsÞ ¼ f ðYðsÞ; xðsÞÞ x2½0;1 n!1 (53) h2½/ðtÞ;t LðtÞ ¼ sup jecx wðx; tÞj ¼ lim (52) Proof. Consider the system Consider now the functional ð 1 (51) x2½0;1 (42) (43) (50) for some class KL function b2. Moreover, from Eq. (45) we get t0 Proof. Based on assumption 2 and [40] we can conclude that there exist a smooth positive definite function S(X(t)) and class K functions c1, c2, c3, and c4 such that (49) Using Eq. (43), the definition of V(t) in Eq. (47) and the properties of a class K function we arrive at /ð0Þh0 c1 ðjXðtÞjÞ SðXðtÞÞ c2 ðjXðtÞjÞ (48) (39) dY ðtlÞ ¼ lf ðY ðtlÞ; xðtlÞÞ dt (57) Under assumption 1 we get @RðY 0 ðtÞÞ lf ðY 0 ðtÞ; x0 ðtÞÞ lðRðY 0 ðtÞÞ þ d3 ðjx0 ðtÞjÞÞ @Y 0 ðtÞ (58) where Y 0 ðtÞ ¼ YðtlÞ 0 x ðtÞ ¼ xðtlÞ (59) (60) By differentiating relation (25) with respect to the spatial variable x we get the following ordinary differential equation (ODE) in x Transactions of the ASME px ðx; tÞ ¼ /1 ðtÞ t f ðpðx; tÞ; uðx; tÞÞ (61) where we also used Eq. (67). Using Eqs. (68)–(70) we have that with initial conditions 1 nðx; tÞ b3 jXðtÞj; x / ðtÞ t pð0; tÞ ¼ XðtÞ ! þ c6 sup jwðx; tÞj (74) x2½0;1 (62) 8x 2 ½0; 1 1 Viewing / (t) t in Eq. (61) as a parameter (rather as the running variable) and comparing Eq. (61) with Eq. (57), with the help of Eq. (58) we get @Rðpðx; tÞÞ 1 / ðtÞ t f ðpðx; tÞ; uðx; tÞÞ @pðx; tÞ /1 ðtÞ t ðRðpðx; tÞÞ þ d3 ðjuðx; tÞjÞÞ ! sup nðx; tÞ b3 ðjXðtÞj; 0Þ þ c6 x2½0;1 sup jwðx; tÞj sup ðjuðx; tÞj þ q^ðjpðx; tÞjÞÞ x2½0;1 (64) x2½0;1 where we used bound (7). Using Eq. (2) and the properties of class K1 functions we get the statement of the lemma. Lemma 6. There exist a class K1 function q2 such that ! x2½0;1 t0 (76) x2½0;1 sup juðx; tÞj sup ðjwðx; tÞj þ q^ðjnðx; tÞjÞÞ x2½0;1 sup jnðx; tÞj q2 jXðtÞj þ sup jwðx; tÞj ; (75) With standard properties of class K1 and KL functions we get the bound of the lemma. Proof of Theorem 1: Under assumption 2 and by using relation (32) we have 1 Rðpðx; tÞÞ exð/ ðtÞtÞ RðXðtÞÞ þ /1 ðtÞ t ðx 1 eð/ ðtÞtÞðxyÞ d3 ðjuðy; tÞjÞdy 0 ! sup jwðx; tÞj x2½0;1 (63) Using the comparison principle and relation (62) we have that e1=p0 RðXðtÞÞ þ sup d3 ðjuðx; tÞjÞdy By noting that b3 is a decreasing function of the second argument and by taking the supremum of both sides we arrive at (77) x2½0;1 With Lemmas 5 and 6 we have that ! sup jwðx; tÞj sup juðx; tÞj þ q^ q1 jXðtÞj þ sup juðx; tÞj x2½0;1 (65) x2½0;1 x2½0;1 x2½0;1 (78) ! Proof. Differentiating Eq. (40) with respect to x we get the following ODE in x nx ðx; tÞ ¼ /1 ðtÞ t f ðnðx; tÞ; jðrðx; tÞ; nðx; tÞÞ þ wðx; tÞÞ x 2 ½0; 1 with initial conditions nð0; tÞ ¼ XðtÞ sup juðx; tÞj sup jwðx; tÞj þ q^ q2 jXðtÞj þ sup jwðx; tÞj x2½0;1 x2½0;1 (79) Using Eqs. (21) and (52) one can conclude that there exist class K1 functions a^ and b^ such that ! jXðtÞj þ sup jWðhÞj a^ jXðtÞj þ sup jUðhÞj (67) With a rescaling of the spatial variable x, say y as y ¼ t þ x /1 ðtÞ t x2½0;1 /ðtÞht (80) /ðtÞht ! jXðtÞj þ sup jUðhÞj b^ jXðtÞj þ sup jWðhÞj /ðtÞht (68) (81) /ðtÞht From Lemma 4 and Eq. (81) we get and by defining fðy; tÞ ¼ n yt ; t /1 ðtÞ t yt xðy; tÞ ¼ w 1 ;t / ðtÞ t ! /ðtÞht (70) with the help of Eq. (33) we rewrite Eqs. (66) and (67) in the new spatial variable y as fy ðy; tÞ ¼ f ðfðy; tÞ; jðy; fðy; tÞÞ þ xðy; tÞÞ; y 2 ½t; /1 ðtÞ (71) fðt; tÞ ¼ XðtÞ jXðtÞj þ sup jUðhÞj b^ b jXð0Þj þ (69) (72) Under assumption 2 and [40], there exist a class KL function b3(,y) and a class K function c6 such that ! sup jWðhÞj; t (82) /ð0Þh0 Setting t ¼ 0 in Eq. (80), Theorem 1 is proved with a ¼ b^ b a^. 4 Adding a Time-Varying Delayed Integrator In this section, we extend the design of the previous sections to nonlinear strict-feedback systems with time-varying delayed integrators. We consider the following system X_ 1 ðtÞ ¼ f1 ðX1 ðtÞÞ þ X2 ð/1 ðtÞÞ (83) X_ 2 ðtÞ ¼ f2 ðX1 ðtÞ; X2 ðtÞÞ þ U ð/2 ðtÞÞ (84) (73) where we assume for notational simplicity that X1 and X2 2 R, U 2 R, and t 2 Rþ . Moreover, it is assumed that the functions /1(t) and /2(t) satisfy assumptions 3 and 4 with Journal of Dynamic Systems, Measurement, and Control JANUARY 2012, Vol. 134 / 011009-5 fðy; tÞ b3 ðjXðtÞj; y tÞ þ c6 sup jxðy; tÞj y2½t;/1 ðtÞ p1/ ¼ 1 p1/ ¼ 2 1 >0 suph/1 /01 ðhÞ 1 ð0Þ (85) suph/1 /02 ðhÞ 2 ð0Þ >0 (87) p0/ ¼ 1 >0 suph/1 ðh /2 ðhÞÞ 2 ð0Þ (88) p1w ¼ p0w ¼ 1 suphw1 ð0Þ w0 ðhÞ >0 1 >0 suphw1 ð0Þ ðh wðhÞÞ (97) (86) 1 >0 suph/1 ðh /1 ðhÞÞ 1 ð0Þ 2 1 f2 P1 w /2 ðrÞ ; P2 ðrÞ þ UðrÞ dr /02 /1 /2 ð0Þ 2 ðrÞ ðh h 2 ½/2 ð0Þ; 0 1 p0/ ¼ 1 P2 ðhÞ ¼ X2 ð0Þ þ We now state the following theorem that is concerned with the stability properties of the closed-loop system that is comprised of the plant (83) and (84) with the controller given in Eq. (92). Theorem 2. Consider the plant (83) and (84) together with the controller (92)–(97). Under assumptions 3–5 there exists a class KL function b4 such that for all X1 ð0Þ 2 R and for all continuous initial conditions X2(s),/1(0) s 0 and U(s),/2(0) s 0 the following holds jX1 ðtÞj þ kX2 ðtÞk1 þkUðtÞk1 b4 ðjX1 ð0Þj þ kX2 ð0Þk1 þkUð0Þk1 ; t ; t 0 (89) (90) where kUðtÞk1 ¼ where kX2 ðtÞk1 ¼ wðtÞ ¼ /2 ð/1 ðtÞÞ (91) We assume that f1 : C1 ðR; RÞ, f2 : R2 7!R is locally Lipschitz with respect to its arguments and it holds that f1(0) ¼ 0, f2(0,0) ¼ 0. For system (83) and (84) we design a predictor-based feedback for stabilizing the origin. System (83) and (84) can possibly escape to infinity before the controller reaches it. We thus make the following assumption. Assumption 5. System (83) and (84) is forward-complete. The predictor-based controller for system (83) and (84) is UðtÞ ¼f2 P1 w /1 2 ðtÞ ;P2 ðtÞ c2 ðP2 ðtÞþc1 P1 ðtÞþf1 ðP1 ðtÞÞÞ @f1 ðP1 Þ c1 þ ðf1 ðP1 ðtÞÞþP2 ðtÞÞR /1 (92) 2 ðtÞ @P1 where c1,c2 are positive constants that satisfy c1 p1/ 6¼ 2c2 (a 1 choice made to simplify one step in the analysis) and ð 1 P1 ðtÞ ¼ X1 ðtÞ þ w1 ðtÞ t f1 P1 w t þ y w1 ðtÞ t 0 þ P2 w t þ w1 ðtÞ t y dy ðt dh ¼ X1 ðtÞ þ ðf1 ðP1 ðhÞÞ þ P2 ðhÞÞ 0 1 (93) w w ðhÞ wðtÞ ð 1 P2 ðtÞ ¼ X2 ðtÞ þ /1 ðtÞ t f2 P1 w t þ y /1 2 2 ðtÞ t 0 P2 /2 t þ y /1 ðtÞ t þ U /2 t þ y /1 dy 2 2 ðtÞ t ð t 1 f2 P1 w /2 ðhÞ ; P2 ðhÞ þ UðhÞ dh ¼ X2 ðtÞ þ /02 /1 /2 ðtÞ 2 ðhÞ sup jUðt þ hÞj (99) h2½/2 ðtÞt;0 sup jX2 ðt þ hÞj (100) h2½/1 ðtÞt;0 We prove this theorem using a series of technical lemmas. Lemma 7. The signals P1(t) and P2(t) defined in Eq. (93) and in Eq. (94) are the w1(t) t and /1 2 ðtÞ t time units ahead predictors of the X1(t) and X2(t), respectively. Moreover, an equivalent representation for Eqs. (93) and (94) is given by ð 1 p1 ð1; tÞ ¼ X1 ðtÞ þ w1 ðtÞ t ðf1 ðp1 ðy; tÞÞ 0 !! /1 t þ w1 ðtÞ t y t þ p2 ;t dy (101) /1 2 ðtÞ t ð 1 1 /2 ðtÞ t y; t ; p ðtÞ t f p ðy; tÞ p2 ð1; tÞ ¼ X2 ðtÞ þ /1 2 1 2 2 w1 t 0 þ uðy; tÞÞdy (102) where p1 ðx; tÞ ¼ P1 w t þ x w1 ðtÞ t p2 ðx; tÞ ¼ P2 /2 t þ x /1 2 ðtÞ t (103) (104) and x varies in [0,1]. Proof. Consider the equivalent representation of system (83) and (84) using transport PDEs for the delayed state X2(t) and the controller U(t) as X_ 1 ðtÞ ¼ f1 ðX1 ðtÞÞ þ n2 ð0; tÞ n2t ðx; tÞ ¼ p1 ðx; tÞn2x ðx; tÞ; x 2 ½0; 1 n2 ð1; tÞ ¼ X2 ðtÞ (94) d/1 ðtÞ RðtÞ ¼ 1 dt (98) (107) X_ 2 ðtÞ ¼ f2 ðX1 ðtÞ; X2 ðtÞÞ þ uð0; tÞ (95) ut ðx; tÞ ¼ p2 ðx; tÞux ðx; tÞ; x 2 ½0; 1 uð1; tÞ ¼ UðtÞ with initial conditions as (105) (106) (108) (109) (110) with P1 ðhÞ ¼ X1 ð0Þ ðh þ ðf1 ðP1 ðrÞÞ þ P2 ðrÞÞ wð0Þ dr ; w0 w1 ðrÞ h 2 ½wð0Þ; 0 (96) 011009-6 / Vol. 134, JANUARY 2012 p1 ðx; tÞ ¼ ! d /1 1 ðtÞ 1 1þx dt /1 1 ðtÞ t (111) Transactions of the ASME 1þx p2 ðx; tÞ ¼ ! d /1 2 ðtÞ 1 dt (112) /1 2 ðtÞ t Consider the following ODEs in x (to become clear that these are ODEs in x, one should view the time t as a parameter rather than as the running variable of the ODE), p1x ðx; tÞ ¼ w1 ðtÞ t !! /1 t þ w1 ðtÞ t x t ;t f1 ðp1 ðx; tÞÞ þ p2 /1 2 ðtÞ t (113) ðtÞ t p2x ðx; tÞ ¼ /1 2 1 / ðtÞ t f2 p1 2 1 x; t ; p2 ðx; tÞÞ þ uðx; tÞ (114) w t where, x varies in [0,1]. The initial conditions for the above system of ODEs are given by pi ð0; tÞ ¼ Xi ðtÞ; i ¼ 1; 2 (115) and p2 ðh2 ; tÞ ¼ X2 t þ h2 /1 2 ðtÞ t ; " # /1 ðtÞ t ;0 h2 2 /1 2 ðtÞ t (116) Assume for the moment that the following holds true p1t ðx; tÞ ¼ p3 ðx; tÞp1x ðx; tÞ; x 2 ½0; 1 (117) p2t ðx; tÞ ¼ p2 ðx; tÞp2x ðx; tÞ; x 2 ½0; 1 (118) where p3 ðx; tÞ ¼ ! d w1 ðtÞ 1 1þx dt w1 ðtÞ t Then, by taking into account Eq. (115) we have that p1 ðx; tÞ ¼ X1 ðt þ x w1 ðtÞ t Þ; x 2 ½0; 1 x 2 ½0; 1 p2 ðx; tÞ ¼ X2 ðt þ x /1 2 ðtÞ t Þ; (119) (120) (121) By setting in each pi(x,t), x ¼ 1 and using Eq. (103) we get Eqs. (101) and (102). To see that Eq. (117) holds, it is sufficient to prove that Eqs. (120) and (121) are the unique solution of the ODEs in x given by Eqs. (113) and (114) with the initial conditions (115) and (116). In this case relations (117) and (118) hold. Thus, it remains to prove that Eqs. (120) and (121) are the unique solution of the initial value problem (113)–(116). Toward that end, we substitute Eqs. (120) and (121) into Eqs. (113) and (114) X10 t þ x w1 ðtÞ t ¼ f1 X1 t þ x w1 ðtÞ t 1 þ X2 /1 t þ w ðtÞ t x (126) 1 1 0 X2 t þ x /2 ðtÞ t ¼ f2 X1 t þ /2 ðtÞ t x ; X2 t þ x /1 2 ðtÞ t 1 (127) þ U /2 t þ x /2 ðtÞ t where the prime symbol denotes the derivative with respect to the argument of a function. Taking into account Eqs. (83) and (84), we conclude that, indeed, Eqs. (120) and (121) are solution of the ODEs in x given by Eqs. (113) and (114). Furthermore, Eqs. (120) and (121) satisfy the initial conditions (115) and (116). Since X2(s),/1(0) s 0 and U(s),/2(0) s 0 are continuous and based on assumption 5 and [42] (Chap. 2.2), X2 ðt þ h2 ð/1 2 ðtÞ tÞÞ is continuous for all h2 2 ð/1 ðtÞ tÞ=ð/1 ðtÞ tÞ; 0 and t 0. 2 Using Eq. [42] we conclude that Eqs. (120) and (121) is the unique solution of the ODEs in x given by Eqs. (113) and (114) with the initial conditions (115) and (116). Thus, Eqs. (117) and (118) hold. It is important here to observe that the total delay from the input U(t) to the state X1(t) is t w(t) and to the state X2(t) is t /2(t). This explains the fact that our predictor intervals are different for each state and specifically must be w1(t) t for X1(t) and /1 2 ðtÞ t for X2(t). Our controller design is based on a recursive procedure that transforms system (105)–(110) to a target system which is globally asymptotically stable with the controller (92)–(97). Then, using the invertibility of this transformation, we prove global asymptotic stability of the original system. We now state this transformation, along with its inverse. Lemma 8. The state transformation defined by Z1 ðtÞ ¼ X1 ðtÞ lðtÞ lðtÞ ;t þ c1 p1 ;t Z2 ðtÞ ¼ X2 ðtÞ þ f1 p1 kðtÞ kðtÞ where lðtÞ ¼ /1 1 ðtÞ t 1 kðtÞ ¼ w ðtÞ t (128) (129) (130) (131) By defining p2 ðx; tÞ ¼ X2 ðtÞ þ /1 2 ðtÞ t ð x 1 /2 ðtÞ t f2 p1 y; t ; p2 ðy; tÞÞ þ uðy; tÞ dy w1 t 0 (125) along with the transformation of the actuator state qðtÞ x; t ; p2 ðx; tÞ wðx; tÞ ¼ uðx; tÞ þ f2 p1 kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ ;t þ c2 p2 ðx; tÞ þ f1 p1 kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ ;t þ c1 p1 kðtÞ 0 1 lðxqðtÞ þ tÞ þ xqðtÞ ;t @f1 p1 B C kðtÞ þ c1 C þB @ A lðxqðtÞ þ tÞ þ xqðtÞ ;t @p1 kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ f1 p1 ;t þ p2 ðx; tÞ kðtÞ 1 R t þ x /2 ðtÞ t (132) Journal of Dynamic Systems, Measurement, and Control JANUARY 2012, Vol. 134 / 011009-7 p1 ð1; tÞ ¼ P1 ðtÞ (122) p2 ð1; tÞ ¼ P2 ðtÞ (123) we get Eq. (103). By integrating from 0 to x (113) and (114) we get ð x ðf1 ðp1 ðy; tÞÞ p1 ðx; tÞ ¼ X1 ðtÞ þ w1 ðtÞ t 0 !! 1 /1 t þ w ðtÞ t y t þ p2 ;t dy (124) /1 2 ðtÞ t where qðtÞ ¼ /1 2 ðtÞ t (133) transforms the system (83) and (84) to the “target system” with the control law given by Eq. (92). The target system is given by Z_1 ðtÞ ¼ c1 Z1 ðtÞ þ Z2 ð/1 ðtÞÞ (134) Z_2 ðtÞ ¼ c2 Z2 ðtÞ þ Wð/2 ðtÞÞ (135) where WðhÞ ¼ 0; h0 (136) Proof. Before we start our recursive procedure we rewrite the target system using transport PDEs as Z_1 ðtÞ ¼ c1 Z1 ðtÞ þ f2 ð0; tÞ (137) f2t ðx; tÞ ¼ p1 ðx; tÞf2x ðx; tÞ (138) f2 ð1; tÞ ¼ Z2 ðtÞ (139) Z_2 ðtÞ ¼ c2 Z2 ðtÞ þ wð0; tÞ (140) wt ðx; tÞ ¼ p2 ðx; tÞwx ðx; tÞ (141) wð1; tÞ ¼ 0: (142) Note that Using Eqs. (119), (130), and (131) and the definition of f(x,t) in Eq. (147) we have that ft ðx; tÞ þ p3 ðf ðx; tÞ; tÞ p1 ðx; tÞfx ðx; tÞ 1 þ l0 ðtÞx 1 þ xl0 ðtÞ lðtÞ ¼ ¼0 kðtÞ lðtÞ kðtÞ Consequently, Eq. (138) holds. From Eq. (139) and by using Eq. (138) we have that X1 ðtÞ; X2 ðtÞÞ þ uð0; tÞ Z_2 ðtÞ ¼ f2 ð @f1 ðp1 ðf ð1; tÞ; tÞÞ þ c1 p1f ðf ð1; tÞ; tÞp1 ð1; tÞfx ð1; tÞ þ @p1 ðf ð1; tÞ; tÞ (151) With the help of Eqs. (111), (113), (130), (131), and (147) we rewrite the previous relation as Z_2 ðtÞ ¼ f2 ðX1 ðtÞ;X2 ðtÞÞþuð0;tÞ @f1 ðp1 ðf ð1;tÞ;tÞÞ d/1 ðtÞ þ þc1 ðf1 ðp1 ðf ð1;tÞ;tÞÞþX2 ðtÞÞ 1 @p1 ðf ð1;tÞ;tÞ dt (152) Define now for notational convenience qðtÞ x kðtÞ (153) lðxqðtÞ þ tÞ þ xqðtÞ kðtÞ (154) g1 ðx; tÞ ¼ ; f2 ðx; tÞ ¼ Z2 /1 t þ x /1 1 ðtÞ t x 2 ½0; 1 (143) g2 ðx; tÞ ¼ Define lðtÞ lðtÞ f2 ðx; tÞ ¼ n2 ðx; tÞ þ f1 p1 x; t þ c1 p1 x; t (144) kðtÞ kðtÞ Then using Eqs. (105) and (115) we get By noting that g1(x,t), g2(x,t), and Rðt þ xð/1 2 ðtÞ tÞÞ satisfy the following boundary value problems g1t ðx; tÞ þ p3 ðg1 ðx; tÞ; tÞ ¼ p2 ðx; tÞg1x ðx; tÞ X_ 1 ðtÞ ¼ c1 X1 ðtÞ þ f2 ð0; tÞ (150) (145) g1 ð0; tÞ ¼ 0 (155) (156) Using relation (117) we have that p1t ðf ðx; tÞ; tÞ ¼ p3 ðf ðx; tÞ; tÞp1f ðf ðx; tÞ; tÞ (146) g2t ðx; tÞ þ p3 ðg2 ðx; tÞ; tÞ ¼ p2 ðx; tÞg2x ðx; tÞ g2 ð0; tÞ ¼ with lðtÞ x f ðx; tÞ ¼ kðtÞ (147) From Eq. (144) and by using relation (146) together with Eq. (106) we get f2t ðx; tÞ ¼ p1 ðx; tÞn2x ðx; tÞ @f1 ðp1 ðf ðx; tÞ; tÞÞ þ þ c1 p1f ðf ðx; tÞ; tÞðft ðx; tÞ @p1 ðf ðx; tÞ; tÞ þp3 ðf ðx; tÞ; tÞÞ (148) and p1 ðx; tÞf2x ðx; tÞ ¼ p1 ðx; tÞn2x ðx; tÞ þ @f1 ðp1 ðf ðx; tÞ; tÞÞ þ c1 @p1 ðf ðx; tÞ; tÞ p1f ðf ðx; tÞ; tÞp1 ðx; tÞfx ðx; tÞ ( wðx; tÞ ¼ (149) ; W /2 t þ x /1 2 ðtÞ t 011009-8 / Vol. 134, JANUARY 2012 0; lðtÞ kðtÞ (157) (158) Rt t þ x /1 ¼ p2 ðx; tÞRx t þ x /1 2 ðtÞ t 2 ðtÞ t (159) and using Eq. (132) we get Eq. (141). Substituting Eq. (132) for x ¼ 0 into Eq. (152) we get Eq. (140). Using the facts that g2 ð1; tÞ ¼ lðqðtÞ þ tÞ þ qðtÞ=kðtÞ 1 1 1 ¼ l /1 2 ðtÞ þ /2 ðtÞ t=/1 /2 ðtÞ t 1 1 1 1 ¼ /1 /2 ðtÞ t=/1 /2 ðtÞ t ¼ 1 and p1 ðqðtÞ=kðtÞ; tÞ ¼ P1 ð/1 ðtÞÞ, with the controller (92) we get Eq. (142). Assuming an initial condition for (132) as w(x,0) ¼ w0(x), and by defining a new variable W as w0 ð xÞ ¼ Wð/2 ðxð/1 2 ð0ÞÞÞÞ for all x 2 ½0; 1, we get that ) 1 0 t þ x /1 2 ðtÞ t /2 ð0Þ 1 t þ x /1 2 ðtÞ t /2 ð0Þ (160) Transactions of the ASME Defining h ¼ t þ xð/1 2 ðtÞ tÞ one gets Eq. (136). The functions f(x,t), g1(x,t), and g2(x,t) are increasing with respect to x and they take values within [0,1]. Hence, whenever they appear as the first argument in p1 or p2 they guarantee that the first argument of p1 or p2 varies within the interval [0,1] which is consistent with the definitions (103) and (104). We now state the inverse of the transformation (128)–(132). Lemma 9. The inverse transformation of Eqs. (128)–(132) is defined as X1 ðtÞ ¼ Z1 ðtÞ lðtÞ lðtÞ ;t þ c1 g1 ;t X2 ðtÞ ¼ Z2 ðtÞ f1 g1 kðtÞ kðtÞ (161) Proof. Solving explicitly (134)–(135) and using Eq. (136) we have for all t 0 that 0 1 Cw B C jZ1 ðtÞj @Cz þ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiA 0 / ðhÞ c1 jc1 p1/ 2c2 j inf h/1 1 1 ð0Þ 1 ( ) 1 0 p1/ 1 C B c1 min 1; 2 t C B Be þ ec2 maxf/1 ðtÞ;0g C A @ (162) kZ2 ðtÞk1 2Cw ec2 maxf/1 ðtÞ;0g qðtÞ uðx; tÞ ¼ wðx; tÞ f2 g1 x; t ; g2 ðx; tÞ kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ ;t f1 g1 kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ ;t c2 g2 ðx; tÞ c1 g1 kðtÞ 0 1 lðxqðtÞ þ tÞ þ xqðtÞ ;t @f1 g1 B C kðtÞ þ c1 C B @ A lðxqðtÞ þ tÞ þ xqðtÞ ;t @g1 kðtÞ lðxqðtÞ þ tÞ þ xqðtÞ c1 g1 ; t þ g2 ðx; tÞ kðtÞ 1 R t þ x /2 ðtÞ t (163) where g1(x,t) and g2(x,t) are the predictors of the transformed states Z1(t) and Z2(t) and hence they satisfy g1 ðx;tÞ ¼ Z1 ðtÞþ w1 ðtÞt !! ðx /1 tþ w1 ðtÞt x t c1 g1 ðy;tÞþg2 ;t dy /1 0 2 ðtÞt g2 ðx; tÞ ¼ Z2 ðtÞ þ /1 2 ðtÞ t ðx (164) ðc2 g2 ðy; tÞ þ wðy; tÞÞdy (170) where 1 c1 /1 Cz ¼ jZ1 ð0Þj þ /1 1 ð0Þe ð0Þ 1 c2 /2 Cw ¼ jZ2 ð0Þj þ /1 2 ð0Þe kZ2 ð0Þk1 ð0Þ (171) kWð0Þk1 (172) With the help of Eqs. (45), (46) and Eqs. (53), (54) we have n o kWðtÞk1 e cp0 /2 min 1;p1 /2 Combining Eqs. (169)–(173) and maxf/1 ðtÞ; 0g t D1 ðtÞ and that t c e kWð0Þk1 using the (173) facts that sup D1 ðtÞ ¼ sup t /1 ðtÞ t0 (169) t0 sup 0t/1 1 ð0Þ t /1 ðtÞ þ sup t /1 ðtÞ (174) t/1 1 ð0Þ the proof is complete with 1 c1 /1 1 ð0Þ þ b/1 ð0Þec2 /2 ð0Þ G ¼ 3 1 þ b þ ec þ /1 1 ð0Þe 2 ! 1 1 g /1 ð0Þ /1 ð0Þ þ p0/ 1 e (175) 0 (165) where x varies in [0,1]. Proof. Using Eq. (144) we have that lðtÞ lðtÞ n2 ðx; tÞ ¼ f2 ðx; tÞ f1 g1 x; t þ c1 g1 x; t (166) kðtÞ kðtÞ With Eq. (161) we get Eq. (105). Consider further 1 b ¼ 2 þ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi /01 ðhÞ c1 jc1 p1/ 2c2 j inf h/1 1 ð0Þ (176) 1 ( g ¼ min c1 ; c1 p1/ 2 1 ; c2 ; cp0/ 2 ) n o min 1; p1/ 2 (177) X_ 2 ðtÞ ¼ c2 Z2 ðtÞ þ wð0;tÞ @f1 ðg1 ðf ð1;tÞ;tÞÞ lðtÞ c1 g1 ;t þ Z2 ðtÞ RðtÞ þ c1 @g1 ðf ð1;tÞ;tÞ kðtÞ (167) We have to relate now the stability of the “target system” with the stability of the system in the original variables. Lemma 11. There exists a class K1 function a^1 such that the following holds for all t 0 jp1 ðx; tÞj þ jp2 ðx; tÞj a^1 jX1 ðtÞj þ kX2 ðtÞk1 þkUðtÞk1 (178) 8x 2 ½0; 1 Then, with Eq. (163) for x ¼ 0 we get Eq. (108). We now prove stability of the “target system.” Lemma 10. The target system Eq. (134)–(136) is globally asymptotically stable in the sense that there exist positive constants G and g such that Proof. By performing a change of variables as x ¼ y=ðw1 ðtÞ tÞ in Eq. (113) and x ¼ y=ð/1 2 ðtÞ tÞ in Eq. (114) we re-write the ODE (in x) system (113)–(115) as jZ1 ðtÞj þ kZ2 ðtÞk1 þ kWðtÞk1 GðjZ1 ð0Þj þkZ2 ð0Þk1 þ kWð0Þk1 egt p01y ðy; tÞ ¼ f1 p01 ðy; tÞ þ p02 ð/1 ðt þ yÞ t; tÞ; y 2 ½0; w1 ðtÞ t (168) (179) Journal of Dynamic Systems, Measurement, and Control JANUARY 2012, Vol. 134 / 011009-9 p02y ðy; tÞ ¼ f2 p01 ðy; tÞ; p02 ðy; tÞ þ u0 ðy; tÞ; jX1 ðtÞj þ y 2 ½0; /1 2 ðtÞ t jX2 ðhÞj lðtÞ sup /1 ðtÞht ! (180) where sup /1 ð0Þh0 ¼ p1 y ;t ; w1 ðtÞ t y 2 ½0; w1 ðtÞ t (181) p02 ðy; tÞ ¼ p2 ! y ; t ; /1 2 ðtÞ t y 2 ½0; /1 2 ðtÞ t (182) p01 ðy; tÞ u0 ðy; tÞ ¼ u jp01 ðy; tÞj þ jp02 ðy; tÞj l ! y /1 2 ðtÞ t y 2 ½0; /1 2 ðtÞ t ;t ; (183) ( where p01 ðyÞ and p02 ð/1 ðt jp01 ð0; tÞj þ p0/ sup /1 ðtÞth0 ! 2 jp02 ðh; tÞj 0 þ sup ju ðh; tÞj (185) h2½0;y (186) Define now the following function: From the forward-completeness assumption we know that x(Y, r) is finite. Moreover, one concludes that for all /1 2 ðtÞ t y w1 ðtÞ t the following holds ! 0 jp01 ðyÞj x y;jp01 /1 ðtÞ t j þ sup jp ð/ ðt þ hÞ tÞj 1 2 2 1 /1 2 ðtÞthw ðtÞt (188) Since from the definition of x, we conclude that for each fixed 1 /1 2 ðtÞ t y w ðtÞ t the mapping x(y,) is increasing and for each fixed r the mapping x(,r) is increasing we get for all 1 /1 2 ðtÞ t y w ðtÞ t that ! sup 1 /1 2 ðtÞthw ðtÞt /1 2 ðtÞ (189) Using the fact that f1(0) ¼ 0 we conclude that x(y, 0) ¼ 0 for all y and hence, there exists a class K1 function a* such that ! 1 0 0 0 jp1 ðyÞj a jp1 /2 ðtÞ t j þ sup jp2 ð/1 ðt þ hÞ tÞj jp02 ð/1 ðt þ hÞ tÞj r 1 t y w ðtÞ t (187) jg1 ðx; tÞj þ jg2 ðx; tÞj a^4 jZ1 ðtÞj þ kZ2 ðtÞk1 þkWðtÞk1 8x 2 ½0; 1: (191) Proof. Relations (164)–(165) can be solved explicitly as ð x c1 ðw1 ðtÞtÞðxyÞ 1 e g2 g1 ðx; tÞ ¼ Z1 ðtÞec1 ðw ðtÞtÞx þ w1 ðtÞ t !0 1 /1 t þ w ðtÞ t y t ; t dy (192) /1 2 ðtÞ t 1 g2 ðx; tÞ ¼ Z2 ðtÞec1 ð/2 ðtÞtðÞx x c2 ð/1 ðtÞtÞðxyÞ 2 þ /1 ðtÞ t e wðy; tÞdy 2 (193) 0 2 1 /1 2 ðtÞthw ðtÞt ! 1 2 þ yÞ tÞ satisfy Eqs: ð179Þ and ð180Þ for all 1 ;jp0 /1 ðtÞ t j þ sup jp02 ð/1 ðt þ hÞ tÞj p0w 1 2 /1 ðtÞthw1 ðtÞt (184) h2½0;t Using Eqs. (99) and (120),(121) we get for all y 2 ½0; /1 2 ðtÞ t ! 1 jp01 ðy;tÞj þ jp02 ðy; tÞj l jX1 ðtÞj þ kX2 ðtÞk1 þkUðtÞk1 p0/ jp01 /1 2 ðtÞ t j þ 1 xðY; rÞ ¼ sup jp01 ðhÞj : /1 2 ðtÞ t h Y w ðtÞ t; jX2 ðhÞj þ sup jU ð/2 ðhÞÞj Comparing the ODE (in y) system (179) and (180) with Eq. (83) and (84) we get for all y 2 ½0; /1 2 ðtÞ t that Note that we view the function /1(t þ y) t where y is the independent variable as the function /1(y) in Eq. (83) (note that both assumptions 3–4 for all t 0 and /1(t þ y) t satisfies y 2 0; w1 ðtÞ t ). Under assumption 5 and using [43] together with the fact that f1(0) ¼ f2(0, 0) ¼ 0 we conclude that there exist a class K function l and a class K1 function such that for all t 0 the following holds jp01 ðyÞj x jX1 ð0Þj þ From relation (193) and using the fact that 0 /1 2 ðtÞ t 1=p0/ we get 2 1 (194) jg2 ðx; tÞj jZ2 ðtÞj þ sup jwðx; tÞj; 8x 2 ½0; 1 p0/ x2½0;1 2 By changing variables in the integral in Eq. (192) and by using the fact that g2 ðx; tÞ ¼ Z2 ðt þ x /1 2 ðtÞ t Þ we write (190) * where we absorb the finiteconstant using p0w into a . Therefore, ðtÞ t / ð h þ tÞ t /1 the fact that /1 ðtÞ t /1 /1 1 2 2 ðtÞ t 1 for all /1 2 ðtÞ t h w ðtÞ t and (186) the proof is complete. Lemma 12. There exists a class K1 function a^4 such that the following holds for all t 0 011009-10 / Vol. 134, JANUARY 2012 ð /1 1 ðtÞt jg1 ðx; tÞj jZ1 ðtÞj þ jZ2 ð/1 ðt þ yÞÞjdy 0 ! ð w1 ðtÞt /1 ðt þ yÞ t þ ; t dy g2 /1 inf t0 f/1 2 ðtÞ t 1 ðtÞtg (195) Transactions of the ASME Using Eq. (194) and the uniform boundness of the functions 1 /1 1 ðtÞ t and w (t) t for all t 0 the proof of the lemma is complete. Proof of Theorem 2: Since f1(X1), f2(X1, X2) and ð@f1 ðX1 ÞÞ=@X1 are continuous, there exist class K1 functions q1, q2 and d^ such that f1 ðX1 Þ q1 ðjX1 jÞ q5 ðsÞ ¼ s þ q3 ðsÞ þ q4 ðsÞ Similarly, using relations (161)–(163) and with the help of Lemma 12 we have for some class K1 function q6 that jX1 ðtÞj þ kX2 ðtÞk1 þ kUðtÞk1 q6 ðjX1 ðtÞj þkZ2 ðtÞk1 þ kWðtÞk1 (196) f2 ðX1 ; X2 Þ q2 ðjX1 j þ jX2 jÞ @f1 ðX1 Þ @f1 ðX1 Þ ^ jX1 jÞ þdð @X1 @X1 X1 ¼0 (197) (198) jZ1 ðtÞj ¼ jX1 ðtÞj kZ2 ðtÞk1 q3 jX1 ðtÞj þ kX2 ðtÞk1 þkUðtÞk1 kWðtÞk1 q4 jX1 ðtÞj þ kX2 ðtÞk1 þ kUðtÞk1 (199) (200) jX1 ðtÞj þ kX2 ðtÞk1 þ kUðtÞk1 q6 ðGq5 ðjX1 ð0Þj þkX2 ð0Þk1 þ kUð0Þk1 egt 5 (207) Examples Example 1. We consider a special case of system (1) (201) where class K1 functions q3 and q4 are (202) q3 ðsÞ ¼ s þ q1 a^1 ðsÞ þ c1 a^1 ðsÞ a1 ðsÞ þ q1 a^1 ðsÞ q4 ðsÞ ¼ q2 a^1 ðsÞ þ c2 ð1 þ c1 Þ^ 1 ^ þ d a^1 ðsÞ þ c1 q1 a^1 ðsÞ þ a^1 ðsÞ inf h/1 ð0Þ /01 ðhÞ (206) Using Eqs. (204)–(206) and with the help of Lemma 10 the theorem is proved with Using relations (128),(129), (132) and with the help of Lemma 11, we have (205) X_ 1 ðtÞ ¼ X2 ðtÞ X2 ðtÞ2 Uð/ðtÞÞ (208) X_ 2 ðtÞ ¼ Uð/ðtÞÞ (209) System (208) and (209) is forward complete since it is in the strict-feedforward form. Moreover, a time-invariant controller that renders the closed loop system input-to-state stable is 1 UðtÞ ¼ X1 ðtÞ 2X2 ðtÞ X2 ðtÞ3 3 (203) (210) Assume now a form for the function /(t) as Hence jZ1 ðtÞj þ kZ2 ðtÞk1 þ kWðtÞk1 q5 ðjX1 ðtÞj þkX2 ðtÞk1 þ kUðtÞk1 /ðtÞ ¼ t (204) 1þt 1 þ 2t (211) Consequently with Fig. 1 System’s response for Example 1. Dot-lines: System with /(t) 5 t and the controller (210). Dash-lines: system with /(t) as in Eq. (211) and the uncompensated controller (210). Solid-lines: System with /(t) as in Eq. (211) and the delay-compensating controller (214). Journal of Dynamic Systems, Measurement, and Control JANUARY 2012, Vol. 134 / 011009-11 Fig. 2 The trajectory of the robot and the heading h(t) with the compensated controller (222)–(225), (227)–(229) (solid line), the uncompensated controller (222)–(225), (226) (dashed line) and the controller (222)–(225), (226) for the delay-free system (dotted line) with initial conditions x(0) 5 y(0) 5 h (0) 5 1 and x(s) 5 v(s) 5 0 for all /(0) £ s £ 0 /0 ðtÞ ¼ 1 þ 1 2 ð1 þ 2tÞ tþ1 /1 ðtÞ ¼ t þ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ðt þ 1Þ2 þ 1 þ t (212) (213) From expressions (211)–(213) one can see that the function /(t) in Eq. (211) satisfies both assumptions 3 and 4. The controller that compensates the time-varying delay is given by 1 UðtÞ ¼ P1 ðtÞ 2P2 ðtÞ P2 ðtÞ3 3 (214) and /(t) and /1(t) are given in Eqs. (211) and (213), respectively. The response of the system for initial conditions X1(0) ¼ 0, X2(0) ¼ 1, and U(h) ¼ 0 for all h 2 ½/ð0Þ; 0 is shown in Fig. 1. We note here that in the case of a constant delay, i.e., in the case where /(t) ¼ t D, and hence, /0 (t) ¼ 1, the control law (214) remains the same, whereas the predictor states are defined as P1 ðtÞ ¼ ðt P2 ðhÞ P2 ðhÞ2 U ðhÞ dh þ X1 ðtÞ tD P2 ðtÞ ¼ ðt U ðhÞdh þ X2 ðtÞ (217) (218) tD Example 2. We consider the problem of stabilizing a mobile robot modeled as where P1 ðtÞ ¼ /1 ðtÞ t ð1 ðP2 / t þ y /1 ðtÞ t 0 2 P2 / t þ y /1 ðtÞ t U / t þ y /1 ðtÞ t Þdy þ X1 ðtÞ ðt dh ¼ P2 ðhÞ P2 ðhÞ2 U ðhÞ 0 1 þ X1 ðtÞ (215) / / ðhÞ /ðtÞ ð1 U / t þ y /1 ðtÞ t dy þ X2 ðtÞ P2 ðtÞ ¼ /1 ðtÞ t 0 ðt dh U ðhÞ 0 1 þ X2 ðtÞ (216) ¼ / / ðhÞ /ðtÞ _ ¼ vð/ðtÞÞ cosðhðtÞÞ xðtÞ (219) _ ¼ vð/ðtÞÞ sinðhðtÞÞ yðtÞ (220) _ ¼ xð/ðtÞÞ hðtÞ (221) subject to the input delay given by Eq. (211), where (x(t), y(t)) is position of the robot, h(t) is heading, v(t) is speed and x(t) is turning rate. When D ¼ 0 (i.e., /(t) ¼ t) a time-varying stabilizing controller for this system is proposed in Ref. [44] as xðtÞ ¼ 5PðtÞ2 cos 3/1 ðtÞ PðtÞQðtÞ 1 þ 25 cos2 3/1 ðtÞ HðtÞ (222) Fig. 3 The control efforts v(t) and x(t) with the controller (222)–(225), (227)–(229) (solid line), the controller (222)–(225), (226) (dashed line) and the controller (222)–(225), (226) for the delayfree system (dotted line) with initial conditions x(0) 5 y(0) 5 h (0) 5 1 and x(s) 5 v(s) 5 0 for all /(0) £ s £ 0 011009-12 / Vol. 134, JANUARY 2012 Transactions of the ASME Fig. 4 System’s response for Example 3. Dot-lines: System with u(t) 5 t and the uncompensated controller. Dash-lines: System with /(t) as in Eq. (211) and the uncompensated controller. Solid-lines: System with /(t) as in Eq. (211) and the delay-compensating controller. vðtÞ ¼ PðtÞ þ 5QðtÞ sin 3/1 ðtÞ cos 3/1 ðtÞ þ QðtÞxðtÞ X_ 2 ðtÞ ¼ UðtÞ (231) (223) PðtÞ ¼ XðtÞ cosðHðtÞÞ þ YðtÞ sinðHðtÞÞ (224) QðtÞ ¼ XðtÞ sinðHðtÞÞ YðtÞ cosðHðtÞÞ (225) where the function /(t) is the function of Example 1. We choose the initial conditions of the plant as X1(0) ¼ 1 and X2(s) ¼ 0 for all s 2 ½/ð0Þ; 0. The controller for this system is UðtÞ ¼ c2 ðX2 ðtÞ þ c1 P1 ðtÞ þ sinðP1 ðtÞÞÞ with ðc1 þ cosðP1 ðtÞÞÞðsinðP1 ðtÞÞ þ X2 ðtÞÞ X ¼ x; Y ¼ y; H ¼ h; /1 ðtÞ ¼ t (226) where we choose c1 ¼ c2 ¼ 2 and The predictor-based version of Eqs. (222)–(225) is given with P1 ðtÞ ¼ X1 ðtÞ þ ðt vðsÞ cosðHðsÞÞds XðtÞ ¼ xðtÞ þ /0 /1 ðsÞ /ðtÞ YðtÞ ¼ yðtÞ þ HðtÞ ¼ hðtÞ þ ðt /ðtÞ xðsÞds /0 /1 ðsÞ ðt ðsinðP1 ðhÞÞ þ X2 ðhÞÞ /ðtÞ dh / /1 ðhÞ 0 (233) (227) In Figs. 2 and 4 we show the response of the system in comparison with the uncompensated controller, i.e., the backstepping controller (232) which assumes /(t) ¼ t. ðt vðsÞ sinðHðsÞÞds /0 /1 ðsÞ /ðtÞ d/1 ðtÞ (232) dt (228) 6 (229) The initial conditions are chosen as x(0) ¼ y(0) ¼ h (0) ¼ 1 and x(s) ¼ v(s) ¼ 0 for all /(0) s 0. From the given initial conditions one can verify thatpffiffithe ffi controller “kicks in” at the time instant t0 ¼ /1 ð0Þ ¼ 1= 2. In Fig. 2 we show the trajectory of the robot in the xy plane and the heading, whereas in Fig. 3 we show the response of the controls v(t) and x(t). In the case of the uncompensated controller (222)–(225), (226), the system is unstable. Example 3. In this example we consider the following system Conclusions We introduce a design methodology for nonlinear systems with time-varying input and state delays. For systems with input delay we achieve asymptotic stability based on a time-varying, infinitedimensional backstepping transformation of the actuator state. For the case of simultaneous input and state delays we employ timevarying, infinite-dimensional backstepping transformations both in the state of the system and the actuator state. In both cases, we prove stability in the original variables using the fact that the backstepping transformations are invertible and using a Lyapunov function that we construct. Our numerical example illustrates the effectiveness of the control law. References (230) [1] Richard, J.-P., 2003, “Time-Delay Systems: An Overview of Some Recent Advances and Open Problems,” Automatica, 39, pp. 1667–1694. Journal of Dynamic Systems, Measurement, and Control JANUARY 2012, Vol. 134 / 011009-13 X_ 1 ðtÞ ¼ sinðX1 ðtÞÞ þ X2 ð/ðtÞÞ [2] Cloosterman, M. B. G., van de Wouw, N., Heemels, W. P. M. H., and Nijmeijer, H., 2009, “Stability of Networked Control Systems With Uncertain Time-Varying Delays,” IEEE Trans. Autom. Control, 54, pp. 1575–1580. [3] Hespanha, J. P., Naghshtabrizi, P., and Xu, Y., 2007, “A Survey of Recent Results in Networked Control Systems,” Proc. IEEE, 95, pp. 138–162. [4] Montestruque, L. A., and Antsaklis, P., 2004, “Stability of Model-Based Networked Control Systems With Time-Varying Transmission Lines,” IEEE Trans. Autom. Control, 49, pp. 1562–1572. [5] Witrant, E., de-Wit, C. C., Georges, D., and Alamir, M., 2007, “Remote Stabilization via Communication Networks With a Distributed Control Law,” IEEE Trans. Autom. Control, 52, pp. 1480–1485. [6] Sipahi, R., Lammer, S., Niculescu, S.-I., and Helbing, D., 2006, “On Stability Analysis and Parametric Design of Supply Networks Under the Presence of Transportation Delays,” ASME-IMECE Conference. [7] Sterman, J. D., 2000, Business Dynamics: Systems Thinking and Modeling for a Complex World, McGraw-Hill, New York. [8] Litrico, X., and Fromion, V., 2004, “Analytical Approximation of OpenChannel Flow for Controller Design,” Appl. Math. Model., 28, pp. 677–695. [9] Orosz, G., and Stepan, G., 2006, “Subcritical Hopf Bifurcations in a CarFollowing Model With Reaction-Time Delay,” Proc. R. Soc. London, 462, pp. 2643–2670. [10] Sipahi, R., Atay, F. M., and Niculescu, S.-I., 2007, “Stability of Traffic Flow Behavior With Distributed Delays Modeling the Memory Effect of the Drivers,” SIAM J. Appl. Math., 68, pp. 738–759. [11] Arstein, Z., 1982, “Linear Systems With Delayed Controls: A Reduction,” IEEE Trans. Autom. Control, 27, pp. 869–879. [12] Krstic, M., 2008, “Lyapunov Tools for Predictor Feedbacks for Delay Systems: Inverse Optimality and Robustness to Delay Mismatch,” Automatica, 44, pp. 2930–2935. [13] Manitius, A. Z., and Olbrot, A. W., 1979, “Finite Spectrum Assignment for Systems With Delays,” IEEE Trans. Autom. Control, AC-24, pp. 541–553. [14] Michiels, W., and Niculescu, S.-I., 2007, Stability and Stabilization of TimeDelay Systems: An Eigenvalue-Based Approach, SIAM, Philadelphia, PA. [15] Mondie, S., and Michiels, W., 2003, “Finite Spectrum Assignment of Unstable Time-Delay Systems With a Safe Implementation,” IEEE Trans. Autom. Control, 48, pp. 2207–2212. [16] Niculescu, S.-I., 2001, Delay Effects on Stability, Springer, New York. [17] Zhong, Q.-C., 2006, Robust Control of Time-Delay Systems, Springer, New York. [18] Smith, O. J. M., 1959, “A Controller to Overcome Dead Time,” ISA Trans., 6, pp. 28–33. [19] Bekiaris-Liberis, N., and Krstic, M., 2010, “Stabilization of Linear StrictFeedback Systems With Delayed Integrators,” Automatica, 46, pp. 1902–1910. [20] Jankovic, M., 2009, “Forwarding, Backstepping, and Finite Spectrum Assignment for Time Delay Systems,” Automatica, 45, pp. 2–9. [21] Jankovic, M., 2010, “Recursive Predictor Design for State and Output Feedback Controllers for Linear Time Delay Systems,” Automatica, 46, pp. 510–517. [22] Watanabe, K., Nobuyama, E., Kitamori, T., and Ito, M., 1992, “A New Algorithm for Finite Spectrum Assignment of Single-Input Systems With Time Delay,” IEEE Trans. Autom. Control, 37, pp. 1377–1383. [23] Niculescu, S.-I., and Annaswamy, A. M., 2003, “An Adaptive Smith-Controller for Time-Delay Systems With Relative Degree n* 2,” Syst. Control Lett., 49, pp. 347–358. 011009-14 / Vol. 134, JANUARY 2012 [24] Yildiray, Y., Annaswamy, A., Kolmanovsky, I. V., and Yanakiev, D., 2010, “Adaptive Posicast Controller for Time-Delay Systems With Relative Degree n* 2,” Automatica, 46, pp. 279–289. [25] Bekiaris-Liberis, N., and Krstic, M., 2010, “Delay-Adaptive Feedback for Linear Feedforward Systems,” Syst. Control Lett., 59, pp. 277–283. [26] Bresch-Pietri, D., and Krstic, M., “Delay-Adaptive Predictor Feedback for Systems With Unknown Long Actuator Delay,” IEEE Trans. Autom. Control, 55, pp. 2106–2112. [27] Bresch-Pietri, D., and Krstic M., 2009, “Adaptive Trajectory Tracking Despite Unknown Input Delay and Plant Parameters,” Automatica, 45, pp. 2074–2081. [28] Krstic, M., 2010, “Input Delay Compensation for Forward Complete and Feed Forward Nonlinear Systems,” IEEE Trans. Autom. Control, 55, pp. 287–303. [29] Mazenc, F., Mondie, S., and Francisco, R., 2004, “Global Asymptotic Stabilization of Feedforward Systems With Delay at the Input,” IEEE Trans. Autom. Control, 49, pp. 844–850. [30] Mazenc, F., and Niculescu, S.-I., 2011, “Generating Positive and Stable Solutions Through Delayed State Feedback,” Automatica, 47, pp. 525–533. [31] Jankovic, M., 2001, “Control Lyapunov-Razumikhin Functions and Robust Stabilization of Time Delay Systems,” IEEE Trans. Autom. Control, 46, pp. 1048–1060. [32] Jankovic, M., 2009, “Cross-Term Forwarding for Systems With Time Delay,” IEEE Trans. Autom. Control, 54, pp. 498–511. [33] Karafyllis, I., 2006, “Finite-Time Global Stabilization by Means of TimeVarying Distributed Delay Feedback,” SIAM J. Control Optim., 45, pp. 320–342. [34] Mazenc, F., and Bliman, P.-A., 2006, “Backstepping Design for Time-Delay Nonlinear Systems,” IEEE Trans. Autom. Control, 51, pp. 149–154. [35] Pepe, P., Karafyllis, I., and Jiang, Z.-P., 2008, “On the Liapunov-Krasovskii Methodology for the ISS of Systems Described by Coupled Delay Differential and Difference Equations,” Automatica, 44, pp. 2266–2273. [36] Krstic, M., 2010, “Lyapunov Stability of Linear Predictor Feedback for TimeVarying Input Delay,” IEEE Trans. Autom. Control, 55, pp. 554–559. [37] Nihtila, M., 1989, “Adaptive Control of a Continuous-Time System With TimeVarying Input Delay,” Syst. Control Lett., 12, pp. 357–364. [38] Nihtila, M., 1991, “Finite Pole Assignment for Systems With Time-Varying Input Delays,” Proceedings of IEEE Conference Decision Control, pp. 927–928. [39] Angeli, D., and Sontag, E. D., 1999, “Forward Completeness, Unboundedness Observability, and Their Lyapunov Characterizations,” Syst. Control Lett., 38, pp. 209–217. [40] Sontag, E., and Wang, Y., 1995, “On Characterizations of the Input-to-State Stability Property,” Syst. Control Lett., 24, pp. 351–359. [41] Khalil, H., 2002, Nonlinear Systems, 3rd ed., Prentice Hall, Englewood Cliffs, NJ. [42] Hale, J. K., and Lunel, V. S. M., 1993, Introduction to Functional Differential Equations, Springer-Verlag, New York. [43] Karafyllis, I., “Non-Uniform in Time Small-Gain Theorem for a Wide Class of Control Systems With Outputs,” Eur. J. Control, 10, pp. 307–323. [44] J.-B. Pomet, 1992, “Explicit Design of Time-Varying Stabilizing Control Laws for a Class of Controllable Systems Without Drift,” Syst. Control Lett., 18, pp. 147–158. Transactions of the ASME
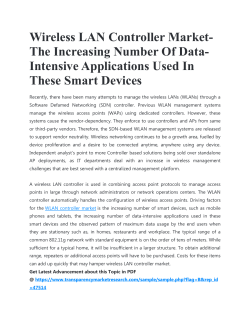
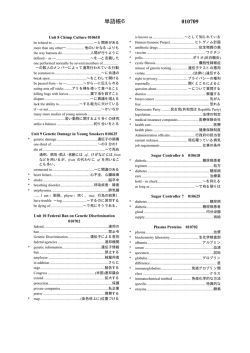
© Copyright 2026 Paperzz