T.C.
MİLLÎ SAVUNMA BAKANLIĞI
HARİTA GENEL KOMUTANLIĞI
HARİTA YÜKSEK TEKNİK OKULU
ANKARA
DENGELEME HESABI
(DENGELEME – I)
DERS NOTLARI
Prof.Dr.Mete NAKİBOĞLU
Dr.Müh.Alb. Coşkun DEMİR
ANKARA
2006
İÇİNDEKİLER
Sayfa No
1
1
1. TANITIM
a. Dengelemenin Amacı
1
b. Jeodezik Yöntemin Ana Unsurları
4
c. Dengelemenin Ana Unsurları
5
d. Alıştırmalar
2. MATEMATİKSEL MODEL VE DOĞRUSALLAŞTIRMA
7
a. Tanıtım
7
b. Doğrusal Modeller ve Gözlem Denklemleri
13
c. Doğrusal Olmayan Modeller, Doğrusallaştırma ve Gözlem Denklemleri
15
d. Sayısal Uygulamalar
19
3. GÖZLEM HATALARI VE İSTATİKSEL MODEL
31
a. Gözlem Hataları ve Normal Dağıtımlı Rastlantısal Değişken
31
b. Normal Dağılımlı Çoklu Değişken
36
c. Kovaryans Kuralı
38
d. Ağırlık Kavramı
41
e. Güvenirlik Kavramı
43
f. Sayısal Uygulamalar
44
4. EN KÜÇÜK KARELER METODU İLE ÇÖZÜMLER
48
a. En küçük kareler prensibi
48
b. Normal denklemler ve çözümleri
50
c. Kovaryans matrisleri ve varyans faktörü
51
d. Varyans faktörü önceden bilinmediğinde çözümler
55
e. Dolaylı model dengelemesi çözümleri
56
f. Şartlı model dengelemesi çözümleri
57
g. Sayısal Uygulamalar
58
ii
1. TANITIM
a. Dengelemenin Amacı
Jeodezinin ana amacı yer üzerinde belirli noktaların (kontrol noktaları) konumlarını tesbit
etmektir. Konum belirleme ise bu noktaların belirli bir koordinat sisteminde koordinatlarını
belirlemekle olur. Bu ana amaca yönelik olarak çoğu durumlarda noktaların koordinatlarını
doğrudan ölçmek mümkün değildir. Genellikle ölçülen büyüklükler; koordinat farkları,
uzaklık, yatay ve düşey açılar gibi koordinatların fonksiyonları olup bunlar çeşitli hatalar da
içerebilir. Dolayısıyla, dengelemenin amacı bu hata içeren gözlemleri kullanarak
bilinmeyenlerin (parametreler, koordinatlar) en uygun de ğerlerini ve bunların duyarlıklarını
(hassasiyetlerini) belirlemek diye özetlenebilir.
Bu amaca ulaşmak için yapılan gözlemlerin ( l ) bilinmeyenler (x) ile ilintili olması gereği
ortaya çıkar. Gözlemler ile bilinmeyenler arasındaki geometrik veya fiziksel ilişkilere
Matematiksel model denir.
Genel olarak gözlemlerde üç tür hata mevcuttur. Sistematik hata, Kaba hata ve
Rastlantısal hatadır. Bu hatalar aşağıda kısaca özetlenmektedir.
Sistematik hata: Hatalı (kalibrasyonu yapılmamış) ölçüm aletleri kullanılmasının ve/veya
hatalı ölçüm yöntemlerinin gözlemlerde sebep olduğu hatalardır. Bu hataları ortadan
kaldırmak için kalibrasyonu ve testleri yapılmış aletler kullanmak, standart gözlem teknikleri
uygulamak ve elde edilen gözlemlere sistematik hatalardan kaynaklanan düzeltmeleri
getirmek gerekmektedir.
Kaba hata: Gözlemlerde dikkatsiz gözlem veya kayıt sonucu ortaya çıkan hatalardır.
Rastlantısal hata: Gözlemcinin ve gözlem aletinin sınırlı ayırma gücü (kapasitesi)
nedeniyle gözlemlerde bulunan ve kaçınılmaz olan hatalardır.
Bu derste gözlemlerin sistematik ve kaba hatalar içermediği ve sadece rastlantısal hatalarla
yüklü oldukları farz edilecek ve rastlantısal hataların tahmini ve hesaplanması için gerekli
yöntemler geliştirilecektir.
b. Jeodezik Yöntemin Ana Unsurları
Genel olarak ölçme ve jeodezi projeleri aşağıda sıralanan adımlar takip edilerek çözülür.
(1) Bilinmeyen büyüklükler ve tayin duyarlıklarının tespiti
Bilinmeyen büyüklüklerin neler olduğu ve bunların hangi duyarlık ile belirlenmesi
gerektiği tesbit edilir. Yöntemi ve dolayısıyla proje maliyetini belirleyen başlıca unsur
istenilen duyarlıktır.
1
(2) Matematiksel modelin formülasyonu
Bilinmeyenler ve bunların istenen duyarlıkları belirlendikten sonra, hangi arazi yöntemi ve
ölçme tekniklerinin bu istenilenleri sağlayacağını tesbit etmektir. Bu yapılırken tabii ki eldeki
alet ve personel imkanları da göz önünde bulundurulur.
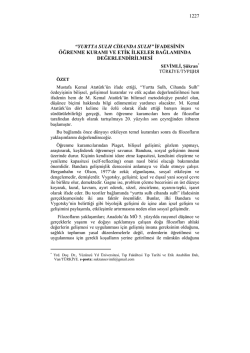
Örneğin, bir P noktasının yatay kooordinatları (n,e) belirli bir duyarlıkla ( σ n , σ e )
istenmektedir. Kuzey (n) ve doğu (e) koordinatlarının istenen standart sapmaları, σ n ve σ e
incelenerek ve eldeki alet imkanları göz önünde tutularak bunun kenar ölçme yoluyla
(trilaterasyon) yapılabileceğine karar verilmiş olsun. Bilinmeyen P noktası, koordinatları
bilinen Ci (ni , ei)
(i = 1,2,..) kontrol noktalarına yatay uzaklık ölçüleri ile bağlanabilir
(Şekil-1).
P(n,e)=? l
4
C4 (n4,e4)
C1 (n1,e1)
n
l1
l3
l2
C3 (n3, e3)
e
C2 (n2, e2)
Şekil-1
Burada ölçülebilecek yatay uzaklıklar li (i =1,2,3,4) olarak gösterilmiştir. Bu problemin
çözümü için en az iki ölçü l1 , l 2 gerekmektedir. Fakat sadece iki ölçü ile istenilen duyarlığı
( σ n , σ e ) elde etmek mümkün olmayabilir. Trilaterasyon kararı vermekle matematiksel
model, yani ölçülecek büyüklüklerle bilinmeyenler (n,e) arasındaki ilişkiler saptanmış olur.
Bu ilişkiler,
l i = (e - e i ) 2 + ( n - n i ) 2
(i = 1,2,3,4)
şeklinde yazılabilir. Ölçü vektörü l =[ l1 l 2 l3 l 4 ]T ve bilinmeyenler vektörü de
x = [ n e ]T ile gösterilirse matematiksel modelin l = f (x) genel şeklinde olduğu görülür.
Bu şekilde ölçü vektörünün bilinmeyenler vektörünün bir fonksiyonu olarak ifade edildiği
matematiksel modele endirek (dolaylı veya parametrik) model denir. Genel olarak
matematiksel modeller 4 tiptir, bunlar;
ı- Dolaylı ( parametrik ) model :
ıı- Bilinmeyenli koşullu (bileşik) model:
ııı- Şart modeli:
ıv- Direkt (dolaysız) model:
l=f(x)
f (x, l ) = o
g (l ) = o
x = f (l )
Bu modellerden şart modeli bilinmeyenleri içermez. Genellikle dolaylı modelden bilinmeyen
vektörü x’in eleminasyonu ile elde edilir. Dördüncü model olan dolaysız model dengelemede
kullanılmaz. Modeller hakkında daha detaylı bilgi ikinci bölümde verilmektedir.
2
(3) Dizayn ve ön-analiz
Uygulanacak arazi yöntemi ve dolayısıyla da matematiksel model belirlendikten sonra karar
verilmesi gereken husus arazide hangi büyüklüklerin, hangi duyarlıkla ölçülmesi gerektiğinin
belirlenmesidir. Bu adımda veri olarak bilinmeyenlerin istenilen duyarlıkları alınır. Bu
istenilen duyarlık ( σ n , σ e ) kullanılarak elde edilen kovaryans matrisi C x ve matematiksel
model kullanılarak kovaryans analizi olarak adlandırılan istatiksel yöntemle hangi ölçülerin
ne duyarlıkla ölçülmesi gerektiği saptanır. Bu adım şematik olarak aşağıdaki gibi gösterilir.
Bilinmeyenlerin istenilen
duyarlıkları
Matematiksel
Model
Cx
l=f(x)
Kovaryans
Analizi
Gerekli ölçüm
duyarlıkları
Cl
Böylece bu adımda bilinmeyenlerin öngörülen duyarlığını elde edebilmek için gerekli olan
ölçüler ve bu ölçülerin hangi duyarlıkla yapılması gerektiği tespit edilir.
(4) Arazi ölçümleri
Hangi büyüklüklerin hangi duyarlıkla ölçülmesi gerektiği tesbit edildikten sonra bu gerekleri
yerine getirecek şekilde arazi ölçümleri yapılır. Bu ölçümler iyi bir kalibrasyon yapılmış
aletle, standart gözlem teknikleri uygulanarak elde edilir. Bu gözlemlere gerekli olan
düzeltmeler getirilir ve gözlemler seçilen hesaplama yüzeyine (düzlem, küre, elipsoid vb.)
indirgenir.
Yukarıda verilen trilaterasyon örneğinde PCi ( i = 1,2,3,4), EDM aletiyle ön-analizle tayin
edilen ölçüm duyarlıklarını ( Cl ) sağlayacak şekilde yeterli sayıda ölçülür. Bu ölçüler yataya
(deniz seviyesine) indirgenir ve ölçülebilenlerin ( li ) ölçü değerleri, ( lio , i = 1, ..,4) elde
edilir.
Burada li , ölçülebilenlerin yani yatay uzaklıkların gerçek değerlerini, lio ise ölçü değerlerini
göstermektedir. Dolayısıyla bu iki gruptan li , yani gerçek değer bilinmemektedir. Bu iki
grup arasındaki fark ise ölçülerdeki rastlantısal hatadır.
lio + r i = li
(i = 1,..,4)
Burada ri değeri lio ölçüsünün rastlantısal hatasıdır ve henüz bu hatanın değeri
bilinmemektedir.
(5) Dengeleme
Arazi ölçümleri ile lio ölçüleri ve bunların apriori (önceden belirlenen) duyarlıklarını
gösteren C l kovaryans matrisi elde edildikten sonra yapılacak iş dengelemedir. Dengeleme
ile l o , C l ve matematiksel model kullanılarak bilinmeyenler vektörünün hesaplanan değeri
3
xˆ = (nˆ eˆ )T vektörü, bunun duyarlığını gösteren C xˆ kovaryans matrisi ve ölçülerdeki
rastlantısal hataların hesap değeri olan rˆ = (rˆ1 ........ rˆ4 )T vektörü elde edilir.
Burada önemli bir konu bir kez daha vurgulanacaktır. x ve r vektörleri bilinmeyen gerçek
değer vektörleridir. Buna karşın xˆ ve rˆ vektörleri ise bu bilinmeyenlerin dengeleme ile
bulunan tahmin değerlerini gösterir. Dengeleme adımı şematik olarak aşağıdaki gibi
gösterilebilir.
Ölçüler ve
kovaryans
matrisi
lo , Cl
Matematiksel
model
l =f(x)
f (x, l ) = o
g( l ) = o
Dengeleme
hesapları
Bilinmeyenlerin tahmin değeri
ve kovaryans matrisi
xˆ , C xˆ
Rastlantısal hataların tahmin
değeri ve kovaryans matrisi
rˆ , C rˆ
(6) Son Analiz : sonuçların irdelenmesi
Dengeleme hesapları tamamlandıktan sonra elde edilen sonuçlar, son analiz aşamasında
istatiksel yöntemlerle incelenir. Bu adım özellikle hesaplanan C xˆ , öngörülen C x den daha
kötü çıkmış ise mutlaka gereklidir. Bu adımda yapılacak başlıca işlemler şunlardır:
(a) Gözlemlerde sistematik bir hata olup olmadığı araştırılır. Bunun için rˆ
vektörünün rastlantısal olup olmadığı sorusuna yanıt aranır.
(b) Gözlemlerde kaba hata olup olmadığı araştırılır. Daha önce gözden kaçmış bir
kaba hata var ise bu kaba hatalı ölçü büyük düzeltme gerektireceğinden bu gözlemin rˆ
değeri de büyük olur. Böylece kaba hatalar istatiksel yöntemlerle tesbit edildikten sonra
atılır ve (ıv)-(v) nolu adımlar tekrarlanır. Yani kaba hata içeren ölçüler atılınca bu ölçüler
arazide tekrarlanır ve yeni ölçüler kaba hatasız eski ölçülerle birleştirilerek dengeleme
işlemleri tekrar edilir.
(c) Son olarak C xˆ matrisi kullanılarak hesaplanan tahmin vektörü xˆ için
istatistiksel güven bölgesi bulunur. Bu bölge ağın boyutuna göre aralık, alan veya hacim
olarak hesaplanır.
c. Dengelemenin Ana Unsurları
Yukarıda özetlenen ön analiz, dengeleme ve son analiz işlemleri için matematiksel modelin
yanısıra bir de istatistiksel model gereklidir. Matematiksel model nasıl ki ölçülebilir vektörü
ile bilinmeyen vektörünü ilintiliyorsa, istatistiksel model de ölçme hataları ile bilinmeyenlerin
hatalarını birbirlerine bağlar. Yukarıda kısaca gösterilen dengeleme adımı daha detaylı olarak
aşağıdaki şemalardaki gibi gösterilebilir.
l o , Cl
Matematiksel
Model
Dengeleme
Hesapları
4
xˆ , rˆ , lˆ
Matematiksel ve
İstatistiksel
Modeller
Cl
Kovaryans
Yayılması
C xˆ ,C rˆ ,C lˆ
d. Alıştırmalar
(1) Aşağıdaki matrisin ortogonal olup olmadığını saptayınız.
0
0 ö
æ1
ç
÷
B = ç 0 0.7660 0.6428 ÷
ç
÷
ç 0 - 0.6428 0.7660 ÷
è
ø
Açıklama:
æ a 11
A=ç
ça
è 21
a 12 ö
÷
a 22 ÷ø
æ a 11 ö
÷
÷
è a 21 ø
ortogonal ise sütün vektörleri V1 = ç
ç
,
æ a 12 ö
÷
V2 = ç
ça ÷
è 22 ø
olmak
üzere
V1 = 1 ,
V2 = 1 ,
V1 ^ V2
V1 V2 = V1 V2 cos ( V1 , V2 )
A -1 = A T
det ( A) = ±1
(+1 düzgün ortogonal, -1 düzgün olmayan ortogonal)
özellikleri geçerlidir.
ATA=?
(2) A matrisi aşağıda verildiğine göre
6 4ö
æ 2
÷
ç
ç - 1 7 10 ÷
÷
A=ç
ç-3 1 6 ÷
çç
÷÷
è - 2 14 20 ø
(3) Aşağıdaki fonksiyonları P(xo=3, yo=7) etrafında Taylor serilerine açınız.
f ( x , y) = ( x - 5) 2 + ( y - 2) 2
g( x , y) = tan -1
x -5
y-2
Açıklama
f(x) = f(x o ) +
1 ¶f
1 ¶ 2f
1 ¶ 3f
(x - x o ) +
(x - x o ) 2 +
(x - x o ) 3 + .....
1! ¶x x
2! ¶x 2
3! ¶x 3
o
xo
xo
5
z = f(x, y) = f(x o , y o ) +
1 ¶f
1! ¶x
(x - x o ) +
x o , yo
2
1 ¶ f
2! ¶y 2
1 ¶f
1! ¶y
(y - y o ) 2 +
x o , yo
(y - y o ) +
x o , yo
2
1 ¶ f
2! ¶x¶y
1 ¶ 2f
2! ¶x 2
(x - x o ) 2 +
x o , yo
(x - x o )(y - y o ) + ..........
x o , yo
(4)
æ x1 ö
x=ç ÷,
çy ÷
è 1ø
0ö
æ 1
ç
÷
A = ç-1 1 ÷ ,
ç
÷
ç 0 - 1÷
è
ø
æ 0.2 ö
ç
÷
w =ç 0 ÷
ç
÷
ç - 0.26 ÷
è
ø
x = ( A T C -1 A) -1 A T C -1 w = ?
6
,
æ1 / 2 0 0 ö
ç
÷
C = ç 0 1/ 3 0÷
ç
÷
ç 0
0 1 ÷ø
è
2. MATEMATİKSEL MODEL VE DOĞRUSALLAŞTIRMA
a. Tanıtım
Matematiksel model, gözlenebilir vektörü l ile bilinmeyen (parametre) vektörü x
arasındaki ilişki olarak tarif edilmişti. Bu ilişki gerek ölçümlerin gerekse bilinmeyenlerin
sadece gerçek değerlerini içerir ve fizik veya geometri kanunlarından elde edilir. Bu
bölümde çeşitli jeodezik problemlerden örnekler verilerek matematiksel modellerin
kurulması konusu açıklığa kavuşturulacaktır. Bilindiği gibi dengelemede modeller;
bilinmeyenli-şartlı (bileşik) f(x, l) = 0 , dolaylı l = f(x) ve şartlı model g(l) = 0 olarak
belirtilmişti. Bu modellere ilişkin örnekler aşağıda verilmektedir.
(1) Azimut gözlemi
Yatay konum tayininde; azimut gözlemi için bir ağdaki i ve j gibi iki noktanın yatay
koordinatları i(xi,yi) ve j(xj,yj) olmak üzere ij doğrultusunun azimutu şekilden görüleceği
gibi
Kuzey
j (xj,yj)
α ij = tan -1
aij
x j - xi
y j - yi
i (xi,yi)
dir. Burada azimut gözleminin gerçek değeri aij, noktalarının bilinmeyen koordinatları
aij =f(xi,yi,xj,yj) şeklinde bir denklemle ilişkilendirilmiş olup bu bir dolaylı model
denklemidir.
(2) Yatay Açı Gözlemi
Bir yatay ağda gözlenen yatay açıların gerçek değerleri de yukarıdaki yöntemle yatay
koordinatlarla ilişkilendirilebilir. Örnek olarak bir ağda üç nokta i(xi,yi), j(xj,yj) ve k(xk,yk)
gözönüne alınsın. Bu üç noktanın meydana getirdiği yatay açılardan bijk açısı aşağıdaki gibi
iki azimutun farkı olarak yazılabilir:
j
bjik =aik - aij
ai
aik ve aij koordinatlar cinsinden yazılırsa,
β jik
ai
x j - xi
x -x
= tan -1 k i - tan -1
y k - yi
y j - yi
i
olur. Bu ise dolaylı (parametrik) doğrusal olmayan bir modeldir.
7
b ijk
k
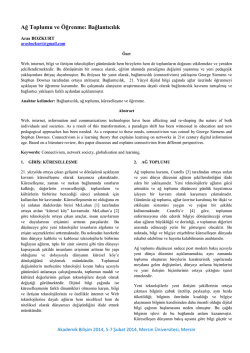
(3)Trilaterasyon
Üç yeni yatay kontrol noktası Pi (xi,yi) (i=1,2,3) tayin edebilmek için bilinen C(x,y)
kontrol noktası kullanılarak aşağıdaki trilaterasyon ağı tesis edilecektir. Bu problemde
bilinmeyen vektörü
P1(x1,y1)
l1
y(kuzey)
x = [ x1 y1 x2 y2 x3 y3 ]T
l5
a12
C(x,y)
l2
x
P3(x3 ,y3)
l4
l3
a32
l6
P2(x2,y2)
dir ve 6 bilinmeyen vardır. Buna karşılık ölçülebilecek yatay uzaklık sayısı bilinmeyen sayısı
kadardır. Halbuki dengelemenin en önemli şartlarından birisi ölçülebilirlerin sayısı n
bilinmeyen sayısı u dan daha büyük olmalıdır (n > u). Dolayısıyla bu ağı kurabilmek için
ilave bağımsız ölçülebilir gerekmektedir. Bu durum şöyle açıklanabilir. Altı adet uzaklık
ölçülebilir ( l i , i =1,…6) CP1P2P3 ağının şeklini yani noktaların birbirlerine uzaklıklarını ve
aralarındaki yatay açıları belirler. Bu ağ yeryüzüne bir tek C noktasından bağlanmış
durumdadır. Bu ise ağı kesin şekilde sabitlemek için yeterli değildir ve ağ C noktası sabit
olmak üzere herhangi bir konuma kolayca döndürülebilir. Dolayısıyla bu ağı yere kesin
olarak oturtabilmek için ya ikinci bir sabit noktaya veya azimut ölçüsüne ihtiyaç vardır.
Örneğin a12 ve a32 azimutlarının da ölçüldüğü düşünülürse, bu durumda eldeki büyüklükler
aşağıdaki gibi gruplanabilir.
Verilen Sabitler : C (x , y)
Ölçülebilirler
: Uzaklıklar: li (i =1,…6), Azimutlar: l7 =a12 , l8 =a32
Bilinmeyenler
: Pi (x i , y i ), (i = 1,2,3)
Böylece n = 8 ve u = 6 olduğundan dengelenebilir bir ağ ortaya çıkmıştır (n > u).
Matematiksel modelde her bir ölçülebilir için bir adet olmak üzere toplam 8 denklem
mevcuttur.
li = ( x - x i ) 2 + (y - y i ) 2
l7 = tan-1
x1 - x
y1 - y
l8 = tan-1
x2 - x3
y 2 - y3
(i=1,2…6)
Bu model kısaca l = f(x) şeklinde gösterilebilir ve dolaylı doğrusal olmayan bir modeldir.
8
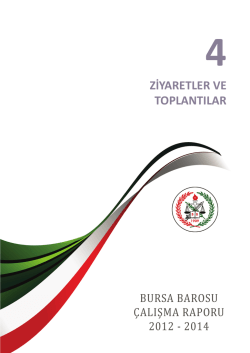
(4) Nivelman
İki yeni yükseklik noktası Pi (xi), (i=1,2) tesis etmek için bu noktaları mevcut ve
bilinen iki yükseklik noktasına Hi (i=1,2) nivelman ile bağlanmak isteniyor. Nivelman ile
gözlenebilen geometrik yükseklik farkları li (i=1,2,..5) dir. Bu durumda eldeki büyüklükler
gruplanırsa,
Verilen Sabitler : H 1 , H2
Ölçülebilirler
: li (i=1,2,..5)
Bilinmeyenler
: xi (i=1,2)
n=5 , u=2 , m=n-u=3>0
l1
H1
P1(x1)
l4
l2
H2
l3
P2(x2)
l5
Dolaylı Model:
l1 = x 1 - H1
l2 = x 2 - x1
l3 = x 2 - H1
l4 = H 2 - x1
l5 = x 2 - H 2
Bu model 5 denklem içeren doğrusal bir modeldir. Yani model
l=Ax+c
şeklindedir. Buradaki sabit katsayılar matrisi, A ve sabit vektör, c kolayca elde edilebilir.
æ l1 ö æ 1
ç ÷ ç
ç l2 ÷ ç - 1
çl ÷ = ç 0
ç 3÷ ç
ç l4 ÷ ç - 1
ç ÷ ç
è l5 ø è 0
0ö
æ - H1 ö
÷
ç
÷
1÷
ç 0 ÷
æ x1 ö
1 ÷çç ÷÷ + ç - H1 ÷
÷è x 2 ø ç
÷
0÷
ç H2 ÷
ç- H ÷
1 ÷ø
è 3ø
A5,2
c5,1
Şart Modeli:
Yukarıda verilen dolaylı modelde bilinmeyenler (x1,x2) elimine edilerek şartlı modele
dönüşüm gerçekleştirilebilir. Örneğin birinci ve beşinci denklemler kullanılarak bilinmeyenler
gözlenebilirler cinsinden ifade edilip x 1 = l1 + H1 ;
x 2 = l5 + H 2 diğer üç denkleme
yerlerine konursa,
9
l1 + l 2 - l5 + H1 - H 2 = 0
l3 - l5 + H1 - H 2 = 0
l1 + l 4 + H1 - H 2 = 0
elde edilir. Bu üç denklem g( l ) = 0 şeklinde olup şartlı modeli meydana getirir. Önemli bir
konuyu burada vurgulamak gerekir. n adet gözlenebilir ve u adet bilinmeyeni olan bir
problemde m=n-u adet bağımsız şart denklemi mevcuttur. Bu denklemlere ilave olarak
yazılabilecek yeni denklemler bağımlıdır ve kabul edilemez. Örneğin şekilden yeni bir şart
olan
l1 + l 2 - l3 = 0
yazılabilir. Fakat bu şart birinci ve ikinci denklemin taraf tarafa çıkarılmasıyla elde edilecek
denklemle aynıdır. Yani bu yeni şart birinci ve ikinci şart denklemlerinden bağımsız değildir.
Bu doğrusal şart modeli de önceki dolaylı model gibi matris ifadesi olarak,
B3,5 l 5,1 + d5,1 = 0
şeklinde yazılabilir.
æ1
ç
ç0
ç1
è
1
0
0
0
0
1
0
0
1
æ l1 ö
ç ÷
1öç l 2 ÷ æ H1 - H 2 ö æ 0 ö
ç
÷ ç ÷
÷
1÷ç l3 ÷ + ç H1 - H 2 ÷ = ç 0 ÷
ç ÷
0 ÷øç l 4 ÷ çè H1 - H 2 ÷ø çè 0 ÷ø
ç ÷
è l5 ø
(5) Triangulasyon Köşesi
Bilindiği gibi triangulasyon azimut ve yatay açılar ölçülerek kurulan yatay kontrol
ağıdır. Bu ağların dengelenmesi önceleri bilgisayar imkanları bulunmadığından adım adım
olmak üzere birkaç fazda tamamlanırdı. İşte böyle bir ağ aşağıdaki şekilde gösterilmiştir. İlk
adım olarak bu ağda her noktada yapılan yatay açı gözlemlerinin dengelenmesi yapılır.
K
Bu ilk dengelemeye örnek olarak bu ağın K’ıncı noktası ele alınsın. Bu noktada yapılan
teodolit gözlemleriyle üç yatay açı belirlenecektir. Ölçüm planına göre gözlenebilirler
li ( i = 1,...,6 ) dir. Bu bir dizi gözlenebilirler ile 3 bilinmeyen açı x i (i = 1,2,3) dolaylı model
olarak ilişkilendirilebilir.
10
l1 = x 1
l2 = x1 + x 2
l1
l3 = x 1 + x 2 + x 3
l2
l4 = x 2
l4
l5 = x 2 + x 3
l6 = x 3
x1
æ l1 ö æ1
ç ÷ ç
ç l 2 ÷ ç1
ç l ÷ ç1
ç 3÷=ç
ç l4 ÷ ç 0
ç ÷ ç
ç l5 ÷ ç 0
çl ÷ ç0
è 6ø è
0
1
1
1
1
0
A5,3
x2
0ö
æ0ö
ç ÷
÷
0÷
ç0÷
æ x1 ö ç ÷
÷
1 ç ÷ 0
÷ç x 2 ÷ + ç ÷
0 ÷ç ÷ ç 0 ÷
x3
1 ÷÷è ø çç 0 ÷÷
ç0÷
1 ÷ø
è ø
c5,1
l3
l5
l6
x3
n = 6 , u = 3 , m = n-u = 3
Bu dolaylı modelden şart modeli de önceki örnekte olduğu gibi bilinmeyenler yok edilerek
elde edilebilir. Bu denklemden üç bilinmeyen yok edildiğinde, içinde bilinmeyen parametre
olmayan m=n-u=3 adet şart denklemi çıkmalıdır. (1),(4) ve (6) denklemlerinden
bilinmeyenler gözlenebilirler cinsinden ifade edilebilirler: yani x 1 = l1 , x 2 = l 4 , x 3 = l6 olur.
Bunlar henüz kullanılmamış olan diğer üç denklemde yerine konursa aşağıdaki eşitlikler elde
edilir.
l1 - l 2 + l 4 = 0
l1 - l 3 + l 4 + l 6 = 0
l 4 - l5 + l 6 = 0
æ1
ç
ç1
ç0
è
-1
0
0
-1
1
1
0
0
1
0
0
-1
æ l1 ö
ç ÷
ç l2 ÷
0 öç ÷ æ 0 ö æ 0 ö
÷ l3
ç ÷ ç ÷
1 ÷ç ÷ + ç 0 ÷ = ç 0 ÷
çl ÷
1 ÷øç 4 ÷ çè 0 ÷ø çè 0 ÷ø
ç l5 ÷
çl ÷
è 6ø
Bu şart denklemleri incelendiğinde bunların gözlenebilirlerin geometrik olarak sağlamaları
gereken koşullardan ibaret olduğu görülür.
(6) Koordinat Sistemi Transformasyonu
Üç kontrol noktasını Pi (i=1,2,3) x - y ve x'- y' koordinat sistemlerinde belirlenmiş
koordinatları (x i , y i ) ve (x' i , y' i ), (i = 1,2,3) verilmiştir. Bu iki lokal koordinat sistemi
arasındaki dönüşüm (transformasyon) ilişkilerini elde etmek dengeleme konusunun tipik bir
uygulamasıdır. İki boyutlu iki koordinat sistemi 4 parametre ile birbirlerine ilişkilendirilir.
11
y
y’
* P1
x’
* P2
a
* P3
a
O
yo
xo
x
Bu parametreler aşağıdaki gibi tarif edilir.
(x 0 , y 0 ) : x'- y' sisteminin orijininin x - y sistemindeki koordinatları
α : rotasyon (dönme) açısı
κ : iki sistem arasındaki ölçek farklılığından kaynaklanan ölçek faktörü
P i ( i = 1,2,3) noktası için transformasyon ilişkileri aşağıdaki gibi yazılabilir.
æxi ö æx0 ö
æ cosα
çç ÷÷ = çç ÷÷ + (1 + κ)çç
è sinα
è yi ø è y 0 ø
-sinα öæç x' i
÷
cosα ÷øç y'
è i
ö
÷
÷
ø
( i = 1,2 ,3)
Dengelemede belirlenen notasyon ile burada;
l12 ,1 = (x 1 y 1 x 2 y 2 x 3 y 3 x'1 y'1 x' 2 y' 2 x' 3 ' y 3 )
T
x 4 ,1 = (x 0 y 0 k a )
T
olarak tarif edilebilir. Bu problemde n=12, u=4 ve m=8 dir. Bu modelde denklem sayısı ise
k=6 dir. Yukarıdaki transformasyon ilişkileri l ve x cinsinden,
- l1 + x 1 + (1 + x 3 ) * (cosx 4 l 7 - sinx 4 l8 ) = 0
P1 için
- l 2 + x 2 + (1 + x 3 ) * (sinx 4 l7 + cosx 4 l8 ) = 0
- l3 + x 1 + (1 + x 3 ) * (cosx 4 l9 - sinx 4 l10 ) = 0
- l 4 + x 2 + (1 + x 3 ) * (sinx 4 l9 + cosx 4 l10 ) = 0
- l5 + x 1 + (1 + x 3 ) * (cosx 4 l11 - sinx 4 l12 ) = 0
P2 için
DENGELEME
MODELİ
P3 için
- l 6 + x 2 + (1 + x 3 ) * (sinx 4 l11 + cosx 4 l12 ) = 0
şeklinde yazılır. Bu model f(x, l ) =o şeklinde yani bileşik (bilinmeyenli-şartlı) bir modeldir.
b.Doğrusal Modeller ve Gözlem Denklemleri
12
Daha öncede belirtildiği gibi matematiksel model; gerçek ve yüzde yüz doğru olan
ölçülebilir vektörünü ( l ) ve bilinmeyenlerin gerçek degerlerini (x) ihtiva eden ve geometrik
veya fiziksel kanunlardan elde edilen ilişkilerden (denklemlerden) ibarettir. Bu modellerin
kullanılabilmesi için bunlarda ölçülerin ( l o ) yerine konulması gereklidir. Ölçülebilirin gerçek
ve ölçü değeri arasındaki ilişki ise
lo+r= l
(2.1)
şeklindedir. Buradaki r vektörü ölçülere getirilmesi gerekli düzeltmelerin gerçek değerini
(ölçü hatasının ters işaretlisi) göstermektedir. Ölçülerde kaba ve sistematik hataların
olmadığı farzedildiği için r vektörüne rastlantısal hata vektörü de denilebilir. Bilinmeyenlerin
gerçek değeri olan x vektörü de benzer şekilde yazılabilir:
xo + δ = x
(2.2)
Burada; x o : bilinmeyenlerin yaklaşık değeridir ve dengelemeden önce ölçülerden yararla
hesaplanabilir. Dolayısıyla x o mevcut kabul edilebilir.
δ : Bilinmeyenlere getirilecek düzeltme vektörüdür.
Doğrusal Şart Modeli:
Doğrusal şart modeli
g( l) = B l + c = o
(2.3)
şeklinde yazılabilir. Burada Bmn katsayılar (dizayn) matrisi,
göstermektedir. Burada (2.1) kullanılırsa,
B (l o + r ) + c = o veya
B r+w=o
;
cm1
de sabit vektörü
(2.4)
w = B lo +c
elde edilir. Bu eşitlikte verilen w, kapanma vektörü olarak adlandırılır. Çünkü l o gözlem
vektörü mükemmel(hatasız) yani l o = l olsaydı, l o vektörü şart modelini sağlayacak ve
B l o +c=0 olacaktı. B l o +c ¹ 0 olmasının sebebi l o içinde bulunan ölçü hatalarıdır. (2.4) ile
verilen denklemlere gözlem denklemleri denir. Bu denklemlerde n adet bilinmeyen (r
vektörünün elemanları) vardır. Aşağıda doğrusal şart modelinden gözlem denklemlerini elde
etme yöntemi bir örnekle sayısal olarak gösterilmektedir.
Örnek:
Basit bir geometrik nivelman örneği şekilde gösterilmiştir.
P(x=?)
l3
l1
H1
l2
H3
H2
13
Mevcut düşey kontrol noktaları Hi ile bilinmeyen P noktası arasında yapılan nivelman
ölçüleri ve Hi noktalarının yükseklikleri aşağıdadır.
i
li ( m )
2
3
10.00
14.98
8.03
1
i
H
1
2
i
(m)
100.00
95.00
102.00
3
Bu nivelman problemi için şart modelini ve gözlem denklemlerini elde ediniz.
Çözüm: Bu problemde n=3, u=1 ve m=2 dir. Dolaylı modele göre gözlem denklemleri
l1 = x - Η 1
l2 = x - H 2
l3 = x - Η 3
şeklindedir. Şart modeli için burada x bilinmeyeni elemine edilirse,
l1 - l 2 + H1 - H 2 = 0
x = l1 + H1 }
l1 - l3 + H1 - H 3 = 0
olur. Burada li = l io + ri ifadesi yerine konursa,
m
r1 - r2 - 0.02 = 0
m
r - r3 - 0.03 = 0
1
æ1
; çç
è1
æ r1 ö
m
0 öç ÷ æ 0.02 ö
æ 0.0 ö
÷÷ç r2 ÷ + çç
÷÷ = çç ÷÷
-1øç ÷ è 0.03 ø
è 0.0 ø
è r3 ø
-1
0
Yani dizayn matrisi ve kapanma vektörü aşağıdaki şekilde bulunur.
æ1
1
è1
0
B mn = B 2,3 = çç
0ö
÷
1 ÷ø
,
æ 0.02 ö
÷÷
è 0.03 ø
m
w m1 = w 2,1 = çç
Burada ölçüler rastgele hata içerdiğinden, w elemanları o (sıfır) değildir. Burada elde edilen
gözlem denklemlerinin çözümü ve rastlantısal hata vektörü r‘nin hesaplanma yöntemleri
dördüncü bölümde anlatılacaktır. Bu bölüm sadece matematiksel model ve gözlem
denklemlerinin elde edilmesi konularına ayrılmıştır.
Doğrusal Dolaylı Model :
Eğer dolaylı model doğrusal ise aşağıdaki gibi gösterilebilir.
l = f (x) = Anu xu1 + dn1
14
Burada Anu dizayn matrisi, dn1 ise sabit vektördür. Bu model denklemlerine (2.1) ve (2.2)
ifadeleri konursa,
o
l o + r = A ( x + δ ) + dn1
veya
rn1 = Anu δ u1 + wn1
wn1 = A xo + dn1- l o n1
(2.5)
elde edilir. wn1 kapanma vektörüdür. Önceki nivelman problemini kullanarak sayısal bir
örnek verelim. Dolaylı modele göre gözlem denklemleri
l1 = x - H1
l2 = x - H 2
l3 = x - H 3
olarak elde edilmişti. Ölçüler lio ve yükseklikler Hi daha önce verilmişti. Modelde
lio + ri = l i ve x = x o + δ kullanılırsa,
r1 = δ + (x o - H1 - l1o )
r2 = δ + (x o - H 2 - l 2o )
r = δ + (x o - H 3 - l 3o )
3
Bilinmeyen x’in yaklaşık değeri xo ölçülerden biri kullanılarak elde edilebilir.
xo = l 1+ H1 =110.0 m
æ r1 ö æ1ö æ 0 ö
ç ÷ ç ÷ ç
÷
ç r2 ÷ = ç1÷δ + ç 0.02 ÷
ç r ÷ ç1÷ ç 0.03 ÷
ø
è 3ø è ø è
m
r3 ,1 = A 3 ,1 δ 1 + w 3 ,1
c. Doğrusal Olmayan Modeller, Doğrusallaştırma ve Gözlem Denklemleri
Yukarıda matematiksel model doğrusal olduğu zaman gözlem denklemlerinin nasıl
elde edileceği açıklandı. (2.1) alt bölümünde de örneklerle görüldüğü gibi pek çok jeodezi
problemi doğrusal olmayan matematiksel model kullanılmasını gerektirir. Doğrusal olmayan
model demek, en az bir bilinmeyen elemanının veya gözlemin doğrusal olarak gözükmediği
model demektir. Bir modeli oluşturan model denklemlerinden bir tanesinin doğrusal
olmaması bütün modeli “doğrusal olmayan model” diye tanımlamak için yeterlidir.
Doğrusallaştırma işleminin esası Taylor serileridir. Bir z=f(x) fonksiyonu verilmiş
olsun. Bu fonksiyon ve fonksiyonun türevleri a £ x £ b aralığı içinde sürekli olsun. Burada x
15
bağımsız değişkendir. Bu fonksiyonun belirtilen aralık içinde bir x = x o noktasında Taylor
serileri bilindiği gibi
f(x) = f(x o ) +
1 ¶f
1 ¶ 2f
1 ¶ 3f
(x - x o ) +
(x - x o ) 2 +
(x - x o ) 3 + ..... a £ x £ b
2
3
1! ¶x x
2! ¶x
3! ¶x
o
xo
xo
şeklinde yazılabilir. Eğer x - x o = δ çok küçük ise δ >> δ 2 >> δ 3
olduğundan bu seriler
yaklaşık serilerdir ve f(x) fonksiyonu yaklaşık olarak,
f(x) = f(x o ) +
1 ¶f
δ + 0(δ 2 )
1! ¶x x
o
(2.6)
olarak yazılabilir. Burada elde edilen yaklaşık ifade d’nın doğrusal bir fonksiyonudur.
Yukarıdaki açılımlar birden fazla bağımsız değişken içeren fonksiyonlara da kolayca
genelleştirilebilir. x ve y bağımsız değişkenlerinin bir fonksiyonu,
z = f(x,y)
olarak verilmiş olsun. Burada f(x,y) fonksiyonu ve bunun çeşitli dereceden kısmi türevleri
bir bölgede sürekli ise bu bölge içindeki bir (xo,yo) noktasında fonksiyonunun Taylor
serilerine açılımı aşağıdaki gibidir.
z = f(x, y) = f(x o , y o ) +
1 ¶f
1! ¶x
(x - x o ) +
x o ,yo
2
1 ¶ f
2! ¶y 2
1 ¶f
1! ¶y
(y - y o ) 2 +
xo , yo
(y - y o ) +
x o , yo
2
1 ¶ f
2! ¶x¶y
1 ¶ 2f
2! ¶x 2
(x - x o ) 2 +
x o , yo
(x - x o )(y - y o ) + ..........
xo , yo
Eğer (x-xo) ve (y-yo) < 1 ise bu seriler yakınsak serilerdir, yani herbir terim bir önceki
mertebedeki terimden daha küçüktür. Böyle olunca seriler kesilebilirler. E ğer (x-x0)»0 ve (yy0)»0 ise kolayca (x-xo)2=0 ve (y-yo)2=0 ve (x-xo) (y-yo)=0 alınabilir. Bu durumda seriler de
z = f(x, y) = f(x o , y o ) +
1 ¶f
1 ¶f
(x - x o ) +
(y - y o ) + 0( 2 )
1! ¶x x , y
1! ¶y x , y
o o
o o
(2.7)
olarak yazılabilir. Bu ifade x ve y nin doğrusal bir fonksiyonudur. Şimdi bu sonuçlar
kullanılarak doğrusal olmayan matematiksel modeller incelenecektir.
Dolaylı Model :
16
Genel haliyle dolaylı model,
l1 = f 1 (x1 , x 2 ,..., x u )
l = f (x)
l 2 = f 2 (x 1, x 2 ,..., x u )
veya
.............................
l n = f n (x 1 , x 2 ,..., x u )
olarak tarif edilmişti. Burada (2.1) ve (2.2) ifadeleri kullanılırsa,
lio + ri = fi (x1o + δ1 , x o2 + δ 2 ,..., x ou + δ u )
(i = 1,2,..., n )
elde edilir. Sağ tarafı ( x 1o , x o2 ,..., x 3o ) etrafında Taylor serisine açılabilir.
lio + ri = f i (x 1o , x o2 ,..., x ou ) +
¶f i
¶x 1
δ1 +
xo
¶f i
¶x 2
δ 2 + ... +
xo
¶f i
¶x u
δ u + 0(δ 2u )
xo
Eğer δ1 ,..., δ u << 1 ise δ 2k » 0 alınabilir ve iki ve daha yüksek dereceli terimler ihmal
edilebilir. Dolayısıyla,
[
¶f i
δ j + f i (x1o ,..., x ou ) - l oi
¶
x
j=1
j xo
u
ri = å
]
Matrisiyel gösterimle,
(2.8)
rn ,1 = A n ,u δ u,1 + w n ,1
olur. Burada An,u dizayn matrisi, wn,1 kapanma vektörü olup, açık ifadeleri aşağıda
verilmektedir.
A n,u
é ¶f1
ê ¶x ......
ê 1
ê.
=ê
ê.
ê ¶f n
.......
ê
ë ¶x 1
¶f1 ù
¶x u ú
ú
ú
ú
ú
¶f n ú
ú
¶x u û x o
w n,1
éf1 (x o ) - l1o ù
ê
ú
.
ú
=ê
ê.
ú
ê
ú
o
o
êëf n (x ) - l n úû
Şart Modeli
17
Şart modeli; n adet gözlenebilir içeren m adet denklemden ibarettir ve aşağıdaki gibi
gösterilebilir
g( l ) = 0
veya daha açık şekilde
g 1 (l1 ,..., l n ) = o
g 2 (l1 ,..., l n ) = o
(2.9)
.
g m (l1 ,..., l n ) = o
Burada l io + ri = l i ile yukarıdaki şart denklemleri lio etrafında Taylor serilerine açılırsa,
n
g i (l1 ,..., l n ) = g i (l1o ,..., l no ) + å
j =1
¶g i
¶l j
rj
l
o
bulunur. Bu ifadeler matris şeklinde yazılırsa,
B m,n rn,1 + w m,1 = 0
B m, n
é ¶g 1
ê ¶l
ê 1
.
=ê
ê .
ê ¶g m
ê
ë ¶l1
¶g 1
¶l 2
.
.
¶g m
¶l 2
(2.10)
¶g 1
¶l n
.
ù
ú
ú
......
ú
......
. ú
¶g m ú
......
ú
¶l n û
......
,
w m,1
é g1 (l o ) ù
ê
ú
. ú
=ê
ê . ú
ê
o ú
êëg m (l )úû
elde edilir. Burada Bm,n ve wm,1 dizayn matrisini ve kapanma vektörünü göstermektedir.
Bileşik (Bilinmeyenli-Şartlı) Model
Model f (x, l ) = 0 şeklinde olup açık şekilde
f 1 (x 1 ,..., x u , l1 ,..., l n ) = 0
f 2 (x 1 ,..., x u , l1 ,..., l n ) = 0
.
f k (x 1 ,..., x u , l1 ,..., l n ) = 0
(2.11)
olarak yazılabilir. Burada (2.1) ve (2.2) denklemleri kullanıp ve ( x o , l o ) etrafında Taylor
serilerine açılırsa,
18
¶f k
i =1 ¶x i
u
f k ( x, l ) = f k ( x o , l o ) + å
¶f k
j=1 ¶l j
n
o
x ,l
o
δi + å
r j + 0(δ 2 , r 2 )
o
x ,l
(k = 1,2,...k)
o
Bu ifadeler matris halinde yazılırsa,
A k ,u δ u ,1 + B k ,n rn ,1 + w k ,1 = 0
(2.12)
A k,u
é ¶f1 ¶f1 ù
ê ¶x ... ¶x ú
u ú
ê 1
ú
ê.
=ê
ú
ú
ê.
ê ¶f k ¶f k ú
.. .
ú
ê
ë ¶x 1 ¶x u û x o ,l o
B k,n
é ¶f1 ¶f1 ù
ê ¶ l .. . ¶ l ú
n ú
ê 1
ú
ê.
=ê
ú
ú
ê.
ê ¶f k ¶f k ú
. ..
ú
ê
ë ¶ l1 ¶ l n û x o ,l o
w k,1
éf1 (x o , l o ) ù
ú
ê
.
ú
ê
=
ú
ê.
ú
ê
êëf k (x o , l o )úû
elde edilir.
d. Sayısal Uygulamalar
(1) Bir laboratuarda gravite (g) tayini için sarkaç deneyi yapılıyor. Sarkacın uzunluğu
L=0.381 m olarak verilmiştir. Sarkacın periyodu 4 defa ölçülmüş olup aşağıda verilmiştir.
Bu problemin çözümü için dolaylı model ve şartlı modeli ile gözlem denklemlerini elde
ediniz.
1
2
3
4
Dolaylı Model
Basit sarkacın periyodu ile gravite
ilişki
lio
i
1238.8785
.8788
.8786
.8786
T = 2π
arasındaki
L
g
şeklindedir. Burada; T gözlenebilir (periyot) l , L sabit (sarkaç uzunluğu) ve g bilinmeyen
(gravite) x dir. Dolayısıyla model
l = 2π
L
x
(i=1,2,3,4)
olur. Bilinmeyen x’in yaklaşık değeri gözlemlerden herhangi birinden elde edilebilir.
l 4o = 2π
L
xo
alınırsa
xo = (
l 4o -2
) L = 9.800 025 597 m / s 2 elde edilir.
2π
Model Taylor serisine açılırsa,
19
l io + ri @ 2π
L
x
-π
o
L
(x o ) 3
d + 0(d 2 )
olur. Matris gösteriminde
æ r1 ö
ç ÷
L
ç r2 ÷
çr ÷ @ - π
(x o ) 3
ç 3÷
çr ÷
è 4ø
æ1ö æç 2 p
ç ÷ ç
ç1÷ ç
ç1÷d + ç
ç ÷ ç
ç1÷ ç 2 p
è ø è
- l1o ö÷
÷
.
÷
.
÷
L - lo ÷
4 ÷
xo
ø
L
xo
şeklinde ifade edilir. Değerler yerine konursa,
æ1ö
æ1ö
ç ÷
ç ÷
L ç1÷
ç1÷
= - 0.001 271 725ç ÷
A 4,1 = - π
,
o 3 ç1÷
1
(x ) ç ÷
ç ÷
ç1÷ 3
ç1÷
è ø s /m
è ø
w 4,1
æ 2p
ç
ç
=ç
ç
ç
ç 2p
è
- l1o ö÷ æ 0.1 x 10 -6 ö
÷
ç
÷ ç - 0.2 x 10 -6 ÷
.
÷=ç
÷
.
÷ ç
0
÷
L - lo ÷ ç
÷
÷ è
0
4
o
øs
x
ø
L
xo
olarak bulunur. Gözlem denklemlerindeki r vektörü birimi saniye, δ ’nın birimi ise m/s2 dir.
Şart Modeli
Dolaylı modelde birinci denklemden x bilinmiyeni yok edilir, diğerlerinde yerine konursa,
l1 = 2π
L
x
2
,
æ 2π ö
x = çç ÷÷ L
è l1 ø
l1 - l2 = 0
l1 - l3 = 0
l1 - l4 = 0
olur. Bu 3 denklem kolayca gözlem denklemlerine dönüştürülür.
r1 - r2 + l1o - l 2o = 0
r1 - r3 + l1o - l 3o = 0
r1 - r4 + l1o - l 4o = 0
Þ
ær ö
0 ö ç 1 ÷ æ - 0 .3 ö
æ1 - 1 0
ç
÷ ç r2 ÷ ç
÷
-6
ç1 0 - 1 0 ÷ ç ÷ + ç - 0.1÷ x10 = 0 4,1
r
3
ç1 0
0 - 1÷ø çç ÷÷ çè - 0.1÷ø
è144
42444
3 è r4 ø 123
w3,1
B
3, 4
20
(2) Pi (xi,yi) bilinmeyen noktalarını belirlemek üzere şekilde gösterilen Ci(xi=ai,yi=bi)
(i=1,2) sabit noktalar kullanılarak li (i=1,2,..5) ölçülebilirleri ölçülmüştür. Dolaylı model
gözlem denklemlerini elde ediniz.
l3
C2(a2,b2)
y
P1(x1,y1)
l4
Bu problemde ölçülebilirler deniz
seviyesine indirgenmiş yatay
mesafelerdir.
l5
l1
l2
P2(x2,y2)
C1(a1,b1)
n = 5, u = 4
m = n-u = 1
x
Bilinmeyen vektörü x = [x1 y1 x2 y2 ]T verilen sabitler (a 1,b1), (a2,b2) dir.
Gözlem Denklemleri
l1 = ( x 1 - a 1 ) 2 + (y1 - b1 ) 2
l 2 = ( x 2 - a 1 ) 2 + (y 2 - b1 ) 2
l3 = ( x 1 - a 2 ) 2 + (y1 - b 2 ) 2
l 4 = ( x 2 - a 2 ) 2 + (y 2 - b 2 ) 2
l5 = ( x 2 - x 1 ) 2 + (y 2 - y1 ) 2
Doğrusallaştırma işlemi için Taylor serisi açılımı
lijo + rij = ( x oj - x oi ) 2 + (y oj - y oi ) 2 14444244443
d oij
x oj - x oi
d oij
dx i -
y oj - y io
d ijo
dy i +
x oj - x io
d ijo
dx j +
y oj - y oi
d oij
dy j
göz önünde tutularak matrisiyel formda gözlem denklemleri aşağıdaki şekilde elde edilir.
æ x10 -a1
ç d0
ç c1p1
æ r1 ö ç
0
ç ÷
ç r2 ÷ ç 0
ç r ÷ = ç x1 - a 2
ç 3 ÷ ç d 0c 2 p1
ç r4 ÷ ç
ç ÷ ç 0
è r5 ø ç 0 0
ç x 2 - x1
ç - d0
p1p 2
è
y10 - b1
d 0c1p1
0
y10 - b 2
d 0c 2 p1
0
-
y 02 - y10
d 0p1p 2
0
x 02 - a1
d c01p 2
0
x 02 - a 2
d c0 2 p 2
x 02 - x10
d 0p1p 2
0 ö÷
÷
æ d co1p1 - l1o ö
y 02 - b1 ÷
÷
d
x
æ 1 ö çç o
d 0c1p 2 ÷ ç
d c1p 2 - l 2o ÷
÷
÷ ç dy ÷ ç
÷
0 ÷ ç 1 ÷ + ç d oc 2 p1 - l3o ÷
÷ ç dx 2 ÷ ç d o
o÷
y 02 - b 2 ÷ ç
÷ ç c 2p2 - l 4 ÷
y
d
è 2ø ç o
d 0c 2 p 2 ÷
d p1p 2 - l5o ÷ø
è
0
0 ÷
y 2 - y1
d 0p1p 2 ÷
ø
21
(3) Şekilde ölçülebilir açıları gösterilen triangülasyon probleminde ölçüler aşağıda
verilmektedir. Dolaylı ve Şartlı modeller için gözlem denklemlerini elde ediniz.
P3
P2
l4
l3
P1
l5
l6
l2
l2
P4
i
lio
1
2
3
4
5
6
48.88
42.10
44.52
43.80
46.00
44.70
Bu problemde P1 P2 P3 ve P1 P2 P4 olmak üzere iki düzlem üçgen gözlenmiştir. Her iki üçgen
için 2 içi açı gerekli olduğundan bu problemde toplam 4 bağımsız bilinmeyen vardır. Bu
bilinmeyenler P4’deki açı x1, P1’deki açı x2, P3’deki açı x3, P3’deki açı x4 olarak seçilebilir.
Bu durumda,
Dolaylı Model
l1 = x1
l3 = x2 – (180o- x3- x4)
l3 = 180o- x3- x4
l4 = 180o- x1- x2
n=6, u=4 , m=2
Yaklaşık değerler
x 1o = l1o = 48.88 o
l5 = x3 – (180o- x1- x2)
l6 = x4
,
x o3 = l 4o + l5o = 89.80 o ,
x o2 = l 2o + l3o = 86.62 o
x o4 = l 6o = 44.70 o
Not: Model doğrusal (lineer) olduğundan yaklaşık değerlerin gerçek değerlere yakın olması
şartı aranmaz. Yaklaşık değerler sıfır olarak seçilebilir. Bu durumu nasıl izah edersiniz?
0
0
0ö
æ 0 ö
æ r1 ö æ 1
ç ÷ ç
÷
ç
÷
1
1
1 ÷æ d1 ö ç - 0.98 ÷
ç r2 ÷ ç 0
ç ÷
çr ÷ ç 0
0 - 1 - 1÷ç d 2 ÷ ç 0.98 ÷
ç 3÷=ç
÷
÷
+ç
0 ÷ç d 3 ÷ ç 0.70 ÷
ç r4 ÷ ç - 1 - 1 0
ç ÷ ç
÷çç ÷÷ ç
÷
r
1
1
1
0
5
ç ÷ ç
÷è d 4 ø ç - 0.70 ÷
ç 0 ÷
çr ÷ ç 0
0
0
1 ÷ø
ø
è
è 6ø è
o
Şartlı Model
l1 = x1
l3 = x2 – (180o- x3- x4)
l3 = 180o- x3- x4
l4 = 180o- x1- x2
l5 = x3 – (180o- x1- x2)
l6 = x4
® x1 = l1
®
®
® x2 = 180o- l1- l4
® x3 = l4 + l5
® x4 = l6
22
l1 + l2 - l5 - l6 = 0
l3 + l4+ l5 + l6 -180o = 0
Model lineer olup bu denklemlerde l oi + ri konursa gözlem denklemleri aşağıdaki gibi elde
edilir.
æ r1 ö
ç ÷
ç r2 ÷
1
1
0
0
1
1
æ
öçç r3 ÷÷ æ 0 o .28 ö æ 0 ö
÷=ç ÷
çç
÷
+ç
1 ÷øç r4 ÷ çè - 0 o .98 ÷ø çè 0 ÷ø
è0 0 1 1 1
ç ÷
ç r5 ÷
çr ÷
è 6ø
(4) t bağımsız değişkenin bir fonksiyonu olarak y değişkeni
y=a t2 + b t + c
şeklinde ifade edilecektir.Bu bilinmeyen polinomun belirlenmesi için çeşitli t değerlerine
karşılık olan y değerleri aşağıdaki gibi gözlenmiştir. t i gözlemlerini hatasız kabul ederek
dolaylı modeli ve gözlem denklemlerini elde ediniz.
i
1
2
3
4
5
ti
0
1
2
3
4
yi
5.00
9.01
14.99
22.98
33.02
Bu tür problem, Jeodezi ve Astronomi’de sık ygulanan “ölçülerden eğri geçirme”
problemine örnek olarak alınmıştır. Burada yi=li ölçülebilirleri, t i hatasız sabitleri ve
(a,b,c)=(x1,x2,x3) ise bilinmeyenleri göstermektedir. Dengeleme notasyonu ile polinom şu
şekilde yazılabilir.
li = x 1 t i2 + x 2 t i + x 3
(i = 1,2,...5)
Bu ise dolaylı modeldir ve lineerdir. Bu problemde n=5, u=3, m=2 dir. Gözlem denklemleri
için bilinmeyenlerin yaklaşık değerleri gerekmektedir. Bu değerler ölçülerin bir bölümü
kullanılarak bulunabilir. Yukarıdaki model denklemin ilk üçü ele alınıp, li yerine lio konursa,
5 = x o3
\
x o3 = 5
9.01 = x 1o + x o2 + x 3o
\
x 1o + x o2 = 4.01
14.99 = 4 x 1o + 2 x o2 + x o3 \
elde edilir. Modelde
®
x 1o = 0.985
4 x 1o + 2 x o2 = 9.99 ®
x o2 = 3.025
li = lio + ri ve
x i = x io + d i konulursa,
ri = t i2 d1 + t i d 2 + d 3 + ( x 1o t i2 + x o2 t i + x 3o - lio )
(i = 1,2...5)
Dolayısıyla, matrisiyel olarak aşağıdaki şekilde gösterilir.
23
æ t 12
ç
çt2
ç 2
A = ç t 32
ç
ç t 24
ç
çt2
è 5
t 1 1ö÷ æ 0
ç
t 2 1÷ ç 1
÷ ç
t 3 1÷ = ç 4
÷ ç
t 4 1÷ ç 9
÷ ç
t 5 1÷ø çè16
æ x 1o t 12 + x o2 t 1 + x o3
ç
ç xot2 + xot + xo
2 2
3
ç 1 2
o
2
o
o
ç
w = x1 t 3 + x 2 t 3 + x 3
ç
ç x 1o t 24 + x o2 t 4 + x o3
ç
ç xot 2 + xot + xo
2 5
3
è 1 5
1 1ö
÷
1 1÷
÷
2 1÷
÷
3 1÷
÷
4 1÷ø
- l1o ö÷ æ 0 ö
ç
÷
- l 2o ÷ ç 0 ÷
÷ ç
÷
- l3o ÷ = ç 0 ÷
÷ ç
÷
- l 4o ÷ ç - 0.04 ÷
÷ ç
÷
- l5o ÷ø çè - 0.16 ÷ø
(5) Poligon (Açı-kenar Ağı)
Açı-kenar ağları mevcut yatay kontrol ağlarını sıklaştırmak için yatay açı, azimut ve
yatay uzaklıklar ölçülerek kurulan ağlardır. Örneğin C(x,y) ve C’(x’,y’) bilinen iki sabir nokta
ise ve Pi(xi,yi) (i=1,2,3) noktaları da tesis edilecek kontrol noktaları ise
y
l7
l3
l1
P1
l2
C(x,y)
l4
l5
l6
P3
P2
l8
l9
C’(x’,y’)
x
Bu noktaların tesisi için yapılabilecek ölçüler şekilde de görüldüğü gibi, l1 ve l9 azimutları, l3,
l5 ve l7 yatay açıları, l2, l4, l6 ve l8 yatay mesafeleridir. Bu problemde;
Ölçü sayısı n=9
Bilinmeyen sayısı u=3x2=6
Serbeslik derecesi m=n-u=3 tür.
Kaç bilinmeyen noktası olursa olsun tamamen ölçülmüş poligon ağlarında m=3 tür.
Yani 3 adet şart denklemi mevcuttur. Bu şöyle açıklanabilir. P1 noktasının belirlenebilmesi
için l1 ve l2 yeterlidir. P1 hesaplandıktan sonra l3 ve l4 kullanılarak P2 , benzer şekilde l5 ve l6
kullanılarak P3 hesaplanabilir. Dolayısıyla l7 , l8 ve l9 ölçüleri fazladır ve bunların sayısı
serbeslik derecesine eşittir. Poligon çözümünü açıklamak için en küçük poligon, yani tek
noktalı bir poligon örnek olarak ele alınacak ve dolaylı model ve şartlı model için gözlem
denklemleri elde edilecektir.
y
l3
l1
C1
l2
P
l4
l5
C2
x
24
Verilen Sabitler:
Gözlemler :
i
xi(m)
yi(m)
1
2
0.000
10000.000
0.000
0.000
i
lio
30 12’ 15’’ = 30o.204166667
4283.00 m
265o 03’ 15’’=265o.054166667
8674.60 m
295o 15’ 33’’=295o.259166667
o
1
2
3
4
5
Dolaylı Model
l1 = tan -1
x - x1
y - y1
p-a1P
l 2 = ( x - x 1 ) 2 + (y - y 1 ) 2
l3 = 180 - tan -1
a1P
x - x1
x -x
+ tan -1 2
y - y1
y2 - y
aP2
aP1 P
l 4 = ( x - x 2 ) 2 + (y - y 2 ) 2
l5 = tan -1
x - x2
y - y2
Bu model doğrusal olmayan dolaylı bir modeldir. Gözlem denklemlerini elde etmek için
bilinmeyen noktanın yaklaşık koordinatlarına ihtiyaç vardır. Şekilden de görüldüğü gibi
yaklaşık koordinatlar,
x o = x 1 + l 2o sin l1o = 2154.704 m
y o = y1 + l 2o cos l1o = 3701.532 m
olarak hesaplanır. Gözlem denklemleri ise x = x o + d x , y = y o + d y ve li = l1o + ri göz önüne
alınarak x o , y o , lio etrafında Taylor serileri açılımı ile elde edilir.Modelde genel olarak iki tip
denklem vardır. Bu iki denklem türü
tan -1
x j - xi
y j - yi
ve
( x j - x i ) 2 + (y j - y i ) 2
şeklindedir. Kaide olarak
tan -1
x j - xi
y j - yi
= tan -1
d
df / dx
tan -1f ( x ) =
olduğu hatırlanırsa,
dx
1+ f 2
x oj - x oi
y oj - y oi
-
y oj - y io
d ijo
2
dx i +
x oj - x oi
d oij = ( x oj - x oi ) 2 + ( y oj - y io ) 2
Benzer şekilde,
25
d oij
2
dy i + -
y oj - y io
d ijo
2
dx j -
x oj - x io
d ijo
2
dy j
d ij = ( x j - x i ) 2 + (y j - y i ) 2 = d ijo -
x oj - x io
dx i -
d ijo
y oj - y oi
d ijo
dy i +
x oj - x oi
d oij
dx j +
y oj - y oi
d oij
dy j
yazılabilir. Bu iki ifade kullanılarak model denklemleri Taylor serilerine açılır.
Önemli not:
i- tan -1
a
ifadesi kullanılarak açı hesaplanırken pay ve paydanın işaretleri önemlidir.
b
x < 0, y > 0
270 o £ a £ 360o
x >0, y > 0
0o £ a £ 90o
x < 0, y < 0
180 o £ a £ 270o
x >0, y < 0
90o £ a £ 180o
Şayet bilgisayarda (veya hesap makinesinde) tan -1 (a / b ) işlemi pay ve payda işaretleri göz
önüne alınarak yapılmıyorsa bilgisayarın bulduğu değer (ab) aşağıdaki gibi düzeltilmelidir.
x
y
a=ab+2p
ab < 0
ab y
ab
a=ab+p
ab > 0
ab ab
y
y
x
x
a=ab
a=p+ab
ab < 0
x
ii- Ölçüler açı ve kenarlar olduğunda w vektörü elemanları radyan ve mesafe birimi olmalı,
derece, dakika, saniye kullanılmamalıdır.
Gözlem denklemleri matris formunda aşağıdaki gibi yazılır.
26
æ
y o - y1
ç
ç
2
d op1
ç
ç
x o - x1
ç
ç
d op1
ç
ç y o - y1 y o2 - y o
A = ç2
2
ç
d op1
d op 2
ç
ç
xo - x2
ç
ç
d op 2
ç
yo - y2
ç
ç
2
ç
d op 2
è
æ
ç
ç
ç
ç
ç
ç
w = ç p - tan -1
ç
ç
ç
ç
ç
çç
è
ö
÷
÷
2
d op1
÷
÷
o
y - y1
÷ æ
-4
-4
ö
÷ ç 2.017883x10 1 / m - 1.174604x10 1 / m ÷
o
d p1
÷ ç
÷
0.503082
0.864238
÷
x o - x1 x 2 - x o ÷ ç
÷ = ç - 1.525935x10 -4 1 / m 1.320399x10 -5 1 / m ÷
2
2
÷
d op1
d op 2 ÷ ç
÷ ç
÷
0
.
904391
0
.
426705
÷ ç
÷
yo - y2
÷ çè - 4.918979x10 -5 1 / m - 1.042564x10 - 4 1 / m ÷ø
o
÷
d p2
÷
xo - x2
÷
÷
2
÷
d op 2
ø
-
x o - x1
ö
÷
÷
o
y - y1
÷ æ
ö
1.1088x10 - 7 rad
÷
÷ ç
d op1 - -l1o
4
÷ ç - 0.6135xx10 m ÷
÷
÷ ç
x - xo
x o - x1
-1 2
+ tan
- l 3o ÷ = ç 5.648112352x10 - 6 rad ÷
÷
÷ ç
y o - y1
y2 - yo
÷
÷ ç
0.076275 m
o
o
d p 2 - -l 4
÷
÷ ç
÷ çè - 8.785411496x10 - 6 rad ÷ø
o
x - x2
÷
- l 5o
tan -1 o
÷÷
y - y2
ø
tan
-1
x o - x1
- l1o
Şart Modeli :
Tüm elemanları ölçülmüş poligon güzergahlarında serbeslik derecesinin ve dolayısıyla şart
denklemleri sayısının 3 olduğu belirtilmişti. Bu şartlar : Açı kapanması, x koordinat
kapanması ve y koordinat kapanmasıdır.
Açı kapanması (azimut şartı):
a1p=l1
ap2=l3-p+ l1= l1+ l3-p
a2p=ap2+p= l1+ l3= l5
l1
® l1+ l3- l5 =0 (1.şart )
C1
x koordinatı kapanması :
x1=sabit
xp= x1+ l2 sina1p= x1+ l2 sin l1
x2= xp+ l4 sinap2= x1+ l2 sin l1+ l4 sin( l1+l3-p) =sabit
l2 sin l1+ l4 sin( l1+l3-p) x1-x2 =0 (2.şart)
27
l1
l3
aP2
P
C2
l5
y koordinatı kapanması :
y1=sabit
yp= y1+ l2 cosa1p= y1+ l2 cos l1
y2= yp+ l4 cosap2= y1+ l2 cos l1+ l4 cos( l1+l3-p) =sabit
l2 cos l1+ l4 cos( l1+l3-p) y1-y2 =0 (3.şart)
Bu üç şart toplu olarak yazılırsa şart modeli denklemleri elde edilir.
l1+ l3- l5 =0
l2 sin l1+ l4 sin( l1+l3-p) x1-x2 =0
l2 cos l1+ l4 cos( l1+l3-p) y1-y2 =0
Bu model doğrusal olmayan modeldir ve li = l1o + ri olduğu göz önüne alınarak lio etrafında
Taylor serilerine açılarak doğrusallaştırılır.
1 nci denklem:
r1 + r3 - r5 + (l1o + l3o - l 5o ) = 0
2 nci denklem:
[l2o cos l1o + l4o cos (l1o + l3o - p)]r1 + [sin l1o ]r2 + [l4o cos (l1o + l3o - p)]r3 + [sin (l1o + l3o - p)]r4
+ l2osin l1o + l4osin (l1o + l3o - p) + x1 + x 2 = 0
3 üncü denklem:
[-l 2o sin l1o - l 4o sin (l1o + l3o - p)]r1 + [cos l1o ]r2 + [-l 4o sin (l1o + l3o - p)]r3 + [cos (l1o + l 3o - p)]r4
+ l 2o cos l1o + l 4o cos (l1o + l3o - p) + y1 + y 2 = 0
Dolayısıyla dizayn matrisi (B) ve kapanma vektörü (w) aşağıdaki gibi elde edilir.
1
0
æ
ç
B = ç l 2o cos l1o + l 4o cos (l1o + l 3o - p) sin l1o
ç
ç - l o sin l o - l o sin (l o + l o - p) cos l o
1
4
1
3
1
è 2
- 1ö
÷
l 4o cos (l1o + l 3o - p sin (l1o + l3o - p) 0 ÷
÷
- l 4o sin (l1o + l3o - p) cos (l1o + l3o - p) 0 ÷ø
1
1
0
1
æ
ç
B = ç 0.078017
0.503082 - 3701.454276 m
ç
ç - 9999.951953 0.854238 - 7845.248333 m
è
0
- 1ö
÷
0.904393
0÷
÷
- 0.426700 0 ÷ø
0
æ
ö æ1.454 440 462 x 10 -5 rad ö
l1o + l3o - l 5o
ç
÷ ç
÷
÷
w = ç l 2o sin l1o + l 4o sin (l1o + l3o - p) + x 1 + x 2 ÷ = ç
- 0.048 047 m
ç
÷ ç
÷
ç l o cos l o + l o cos (l o + l o - p) + y + y ÷ ç
÷
0
.
078017
m
1
4
1
3
1
2ø è
è 2
ø
28
(6) Bir yatay koordinat sistemi dönüşümü probleminde her iki koordinat sisteminde de
bilinen üç ortak noktanın Pi(i=1,2,3) koordinatları aşağıda verilmiştir.Bu noktalardan (xi,yi)
(i=1,2,3) yüksek duyarlıkta bilinmekte olup, hatasız (sabit) kabul edilebilir. 4 parametreli bu
dönüşüm probleminde dolaylı model gözlem denklemlerini elde ediniz.
y’
i
xi(m)
yi(m)
x’i(m)
y’i(m)
1
601.88
1213.06
3331.62
2561.88
2
58.60
3176.95
2788.90
4525.51
3
3142.64
7126.19
5872.15
8474.96
y
a
xo
O
O’
n=6, u=4, m=2
yo
x
æ x i' ö æ x o ö
æ cos a sin a öæ x i ö
ç ÷ = ç ÷ = (1 + k )ç
÷ç ÷
ç - sin a cos a ÷ç y ÷
ç y' ÷ ç y ÷
øè i ø
è
è iø è oø
Ölçülebilir vektörü
:
l = [l1 l 2 l3 l 4 l5 l 6 ] T = [ x 1' y1' x '2 y '2 x 3' y 3' ]T
Bilinmeyenler vektörü : x = [ x o y o k a] T
Sabitler
: xi,yi (i=1,2,3)
Dolaylı Model
l1 = x o + (1 + k )( x 1 cos a + y1 sin a )
l3 = x o + (1 + k )( x 2 cos a + y 2 sin a )
Yaklaşık değerler:
a ve k küçük olduklarından
ao =0 ve ko=0 alınabilir.
l 4 = y o + (1 + k )( - x 2 sin a + y 2 cos a)
x oo = x 1' - x 1 = 2729.74 m
l5 = x o + (1 + k )( x 3 cos a + y 3 sin a)
l 6 = y o + (1 + k )( - x 3 sin a + y 3 cos a)
y oo = y1' - y1 = 1348.82 m
l 2 = y o + (1 + k )(- x 1 sin a + y1 cos a)
Doğrusallaştırma
æ1
ç
ç0
ç
ç1
A=ç
ç0
ç
ç1
ç
è0
0
1
0
1
0
1
x’
x 1 cos a + y1 sin a
(1 + k )(- x 1 sin a + y 1 cos a) ö
÷
- x 1 sin a + y1 cos a (1 + k )( - x 1 cos a - y1 sin a) ÷
÷
x 2 cos a + y 2 sin a (1 + k )(- x 2 sin a + y 2 cos a) ÷
÷
- x 2 sin a + y 2 cos a (1 + k )( - x 2 cos a - y 2 sin a) ÷
÷
x 3 cos a + y 3 sin a (1 + k )(- x 3 sin a + y 3 cos a) ÷
÷
- x 3 sin a + y 3 cos a (1 + k )( - x 3 cos a - y 3 sin a) ø
29
æ1
ç
ç0
ç
ç1
A=ç
ç0
ç
ç1
ç
è0
0
x1
1
y1
0 x2
1 y2
0 x3
1
y3
y1 ö æ 1
÷ ç
- x1 ÷ ç 0
÷ ç
y2 ÷ ç1
÷=ç
- x2 ÷ ç0
÷ ç
y3 ÷ ç 1
÷ ç
- x3 ø è0
0
601.88
1 1213.06
0
58.60
1 3176.95
0 3142.64
1 7126.19
1213.06 ö
÷
- 601.88 ÷
÷
3176.95 ÷
÷
- 58.60 ÷
÷
7126.19 ÷
÷
- 3142.64 ø
æ x oo + (1 + k o )( x 1 cos a o + y1 sin a o ) ö æ x oo + x 1 - l1o ö æ 0.0 ö
ç
÷ ç
÷ ç
÷
ç y o + (1 + k o )( - x sin a o + y cos a o ) ÷ ç y o + y - l o ÷ ç 0.0 ÷
1
2 ÷
1
1
ç o
÷ ç o
ç
÷
ç x o + (1 + k o )( x cos a o + y sin a o ) ÷ ç x o + x - l o ÷ ç - 0.56 ÷
o
2
3
o
2
2
÷=ç
÷=ç
w =ç
÷
ç y oo + (1 + k o )(- x 2 sin a o + y 2 cos a o ) ÷ ç y oo + + y 2 - l 4o ÷ ç 0.26 ÷
ç
÷ ç
÷ ç
÷
ç x oo + (1 + k o )( x 3 cos a o + y 3 sin a o ) ÷ ç x oo + x 3 - l 5o ÷ ç 0.23 ÷
ç o
÷ ç
÷
ç y + (1 + k o )(- x sin a o + y cos a o ) ÷ ç y o + y - l o ÷ ç 0.05 ÷
ø
3
6 ø è
3
3
è o
ø è o
30
m
3. ÖLÇÜ HATALARI VE İSTATİKSEL MODEL
a. Ölçü Hataları ve Normal Dağılımlı Rastlantısal Değişken
Birinci bölümde belirtildiği gibi gözlemler genel olarak 3 tür hata içerir.
Bunlar sistematik, kaba ve rastlantısal hatalardır. Sistematik hatalar kalibrasyonu yapılmamış
hatalı alet kullanımı ve/veya uygun olmayan gözlem yönteminden kaynaklanan hatalardır.
Kalibrasyonu yapılmış alet kullanılarak talimatlarda belirtilen esaslara göre gözlem yapılıp
gerekli düzeltmeler getirildiğinde sistematik hatalar elemine edilir.
Kaba hatalar dikkatsiz ölçü veya kayıt ile meydana gelen hatalar olup ölçü tekrar
edildiğinde veya kayıtlar kontrol edildiğinde ortaya çıkarılır. Bu derste ölçülerin sistematik
ve kaba hata içermediği kabul edilecektir.
Geriye kalan rastlantısal hatalar bertaraf edilmesi mümkün olmayan, gözlemci ve aletin
sınırlı kapasitesi dolayısıyla ortaya çıkan, genellikle küçük değerli hatalardır. Bu derste
rastlantısal hataların tahmin edilip hesaplanması için gerekli yöntemler geliştirilecektir.
Rastlantısal hataların genel karakterini açıklamak için gerçek uzunluğu m olarak bilinen
bir bazda yapılan ölçüler l io (i=1,2,…n) histogram ile gösterilip incelenecektir. Ölçülerin
histogram ile gösterilmesi için öncelikle bu ölçüler belirli bir aralık (d) değeri saptanıp
gruplandırılır. Örneğin bir baz için yapılan n=60 adet ölçü aşağıdaki gibi gruplandırılıyor.
Sınıf Sınırı
Mutlak yığılma
(ai)
Frekans
(fi)
1
0.017
2
0.033
6
0.100
12
0.200
20
0.333
11
0.183
5
0.083
3
0.050
Sınıf sayısı (k) £ n
751.050
751.060
751.070
Sınıf aralığı(d) = (en büyük – en küçük ) / k
Mutlak yığılma (ai) = (i inci grup ölçü
sayısı)
Frekans (fi ) = (a i/n) (bağıl yığılma)
751.080
751.090
å
751.100
751.110
751.120
ai = n = 60,
å fi =1
frekanslar
gözlem
gruplarının
bir
fonksiyonu
olarak
grafiksel
olarak
gösterildiğinde “histogram” grafiği elde edilir.
751.130
Sınıflandırma yapılırken, Sınıf aralıklarının eşit olması, sınıf orta değerlerinin olabildiğince
tamsayılı değerler olması ve sınıf sınırına düşen ölçünün her iki tarafa 0.5 olarak sayılması
hususlarına dikkat edilir.
31
f(lo)
0.3
0.2
.130
.120
.110
.100
.090
.080
.070
.060
.050
0.1
lo
Yeni bir ölçü yapılsa, raslantısal olay olduğu için ölçü değerinin ne olacağı bilinemez.
Ancak hangi sınıfa düşeceğinin olasılığı kuramsal olarak hesaplanabilir. O halde bir sınıf için
bulunan bağıl yığılma (frekans) bir ölçünün o sınıfa düşme olasılığını verir.
Ölçüler sonsuz sayıda yapılsa ve sınıf aralıkları sonsuz küçük alınsa Şekil-3.1 ‘deki
histogram sürekli bir eğriye dönüşür.
f (l o )
fmax
lo
m
Şekil-3.1 Ölçülerin İhtimal Yoğunluk fonksiyonu f(l o )
Bu eğrinin fonksiyonu
f(l o ) =
1
2p σ
-
e
(l o -μ )2
2 σ2
(3.1)
ile tanımlıdır ve olasılık (yoğunluk) fonksiyonu adı ile anılır. Bu eşitliğe uyan raslantısal
değişken ise normal dağılımdadır denir. Normal dağılımın iki parametresi vardır:
μ = Gerçek değer (istatistikte teorik ortalama)
s2 = Varyans
32
~
~
l raslantısal değişkenin normal dağılımda olduğu, l ~ n ( μ ,s2 ) ile gösterilir.
~
f(lio ) ile l rasgele değişkeninin herhangi bir aralıkta değer alma olasılığı hesaplanabilir.
Olasılık yoğunluk fonksiyonunun temel olarak iki özelliği vardır.
i- f(l ) ³ 0
Her deneyin daima bir sonuç vardır. Ölçüler pozitif, negatif veya sıfır
olabilir
¥
ii-
ò f(l ) dl = 1
Bir değişkenin -¥ ile +¥ arasında tüm değerleri alma olasılığı 1 dir.
-¥
Eğer ölçüler sistematik hata içermez ise maksimum frekans (fmax)‘a tekabül eden lio bu
bazın gerçek değeri olan μ ’ye eşittir. Varyans, ölçülerin değişebilirliğini gösterir. Düşük
duyarlıklı ölçüler m etrafında daha çok saçılmışlık sergiler ve s2 değeri büyük olur (Şekil3.2)
f(lo)
Yüksek duyarlık (s1)
Düşük duyarlık (s2)
lo
m
Şekil-3.2 Varyans (dispersiyon) değişimi ( s2 > s1)
Ölçüler lio (i = 1,2,......, n ) ve gerçek değer μ verildiğine göre, ε i = lio - μ ile her ölçü
için gerçek hatalar (ε i ) hesaplanır ve ε i ‘ler için histogram çizilirse Şekil-3.3’deki ihtimal
yoğunluk fonksiyonu elde eldir.
f(ε)
ε
mε=0
Şekil-3.3 Gerçek hataların İhtimal Yoğunluk fonksiyonu f(ε )
Ölçüler ve bunların gerçek hataları ile çizilen histogramlar özdeş olup aynı normal
dağılımdadır. Ancak gerçek hataların beklenen değeri me =0 olduğu için e ~ n (0, s2 ) olur.
Bu durumda İhtimal yoğunluk fonksiyonu,
33
f(e) =
1
e2
-
2 σ2
e
2p σ
şeklinde yazılır. İhtimal Yoğunluk Fonksiyonu aşağıdaki özellikleri taşır.
iii- Bu eğrinin maksimum değeri fmax= f (e=0)
iv- f (e) = f (-e) (e = 0 eksenine göre simetriktir.)
v- lim f(ε) = 0
e ®± ¥
¥
vi-
ò f(ε ) dε = 1
( Eğrinin sınırladığı alan 1’e eşittir.)
ε =-¥
Rasgele Değişken : Belirli bir olasılıkla (ihtimalle) - ¥ ile + ¥ arasında her değeri alabilen
~
bağımsız değişkenlere rastgele değişken denir. Rastgele değişken ( l ) olmak üzere, Bu
rasgele değişkenin,
- ¥ ile + ¥ arasında bir değer alması olasılığı,
+∞
~
P - ¥ £ l < +∞ = ∫ f(l ) dl = 1
(
)
l =- ∞
( %100 )
“a” gibi bir değerden küçük bir değer alma olasılığı,
(
)
a
~
P - ¥ £ l < a = ∫ f (l ) dl
-∞
a ve b gibi bir aralıkta değer alma olasılığı,
(
)
b
~
P a £ l < b = ∫ f (l ) d l
a
şeklinde yazılır. Bu eşitliklerde integrallerde geçen l operantı ile rasgele değişkenin gerçek
değeri karıştırılmamalıdır.
Ümit Değer: Bir rasgele değişkenin ümit değeri (expected value)
∞
~
E( l ) = μ = ∫ l f(l ) dl
-∞
ile tanımlanır. Bu ise gerçek değeri elde etmek için sonsuz sayıda ölçü yapmak gerektiğini
ifade eder.
34
~
Rasgele Değişkenin Bir Fonksiyonunun Ümit Değeri: Rasgele değişken l ’nin bir
~
fonksiyonu g( l ) ise bu fonksiyonunun ümit değeri,
∞
~
E[g( l )]= ∫ g (l ) f(l ) dl
l =- ∞
Rasgele Değişkenin k’ ıncı Momenti:
[ ]
∞
~
E l k = ∫ l k f (l )dl
l =-∞
Rasgele Değişkenin k’ıncı Merkezsel Momenti:
∞
~
E [( l - μ) k ] = ∫ (l - μ) k f(l ) dl
l =-∞
Rasgele Değişkenin Varyansı: ( σ 2 ) Değişkenin ikinci derece merkezsel momentidir.
∞
~
σ 2 = E[(l - μ) 2 ] = ∫ (l - μ) 2 f(l ) dl
veya
l =- ∞
∞
∞
∞
∞
l =- ∞
l =- ∞
l =- ∞
l =- ∞
σ 2 = ∫ (l 2 - 2μl + μ 2 ) f(l ) dl = ∫ l 2 f(l )dl - 2μ ∫ l f(l )dl + μ 2 ∫ f(l ) dl
σ 2 = E[l 2 ] - 2μ 2 . + μ 2
∴
σ 2 = E[l 2 ] - μ 2
olur.
Rasgele Değişkenin Standart Sapması: (s) Varyansın kareköküdür.
~
σ = m E[(l - μ) 2 ]
Yukarıdaki integraller rasgele değişkenin sonsuz defa ölçüldüğü durumda geçerlidir.
Pratikte ise ancak sınırlı sayıda ölçü mevcuttur. Bu durumda, integral işlemi yerine yaklaşık
olarak toplama işlemi ò »å alınır. Ümit değeri yerine örnek küme ortalaması
d
1 n
lˆ = ∑ l jo f j = ∑ lio
n i =1
j=1
( lj ve fj : j inci sınıfın orta değeri ve frekansıdır.
bulunur. Ortalamanın ümit değeri ise gözlemin gerçek değerine eşittir. Yani μ = E[lˆ] dir.
Genelde μ hiçbir zaman bilinmediği için μ yerine onun tahmin değeri olan lˆ ortalaması
kullanılır. μ değerinin bilindiği durum ise yukarıda verilen baz örneğindeki gibi kalibrasyon
ölçmelerinde söz konusudur. Sınırlı sayıda gözlem olduğunda varyans formülü aşağıdaki
şekle dönüşür.
35
σ2 =
1 n o
∑ (li - μ) 2
n i =1
σ2 =
1 n o ˆ 2
∑ (l i - l )
n i =1
( μ biliniyorsa )
1 n
, lˆ = ∑ lio
n i=1
( μ bilinmiyorsa )
b. Normal Dağılımlı Çoklu Değişken:
Bir önceki bölümde tek bir rasgele değişken incelendi. Yani elde gerçek değeri μ ve
varyansı s2 olan bir tek değişkene ilişkin ölçüler mevcut idi. Jeodezide genellikle çok sayıda
değişkenin birlikte incelendiği durumlar vardır. Örnek olarak şekildeki trilaterasyon ağı
verilebilir. Her rasgele değişkenin gerçek değeri ve varyansı değişik değerler alabilir.
l1
P2
P3
l2
ln
l3
P1
~
Bu durumda li (i=1,2…n) sürekli rasgele değişkenleri için çok boyutlu olasılık yoğunluk
fonksiyonu f(l1,l2,….., ln) olarak tanımlanır ve aşağıdaki özellikleri taşır.
i-
f(l1,l2,….., ln) ³ 0
¥
ii-
¥
ò ò
-¥ -¥
¥
.... ò f (l1 , l 2 ....l n )dl1 dl 2 ....dl n = 1
-¥
Çoklu rasgele değişken vektörü
u=(u1,u2,…un)T olarak gösterilirse,
~
u i = E(li ) =
¥
ò
-¥
~ ~ ~
~
l = ( l1 , l2 ,.....ln ) T
’nin
gerçek
değer
vektörü
¥
.... ò li f (l1 , l 2 ....l n )dl1dl 2 ....dl n
-¥
şeklinde yazılabilir. Çok boyutlu normal dağılımın yoğunluk fonksiyonu ise
f (l ) =
1
(2π )
n/2
é 1
ù
exp ê- (l - u) T C -l 1 (l - u )ú
ë 2
û
det C l
dir. Burada C l o , l o nin varyans-kovaryans matrisidir. Kısaca kovaryans matrisi olarak
adlandırılacaktır. Bu ifade tek boyutlu yoğunluk fonksiyonu ile
36
karşılaştırılırsa tekli
değişkendeki varyans ( σ 2 ) yerine çoklu değişken için C l o kovaryans matrisi gelmektedir.
Bu matrisin tanımı ise σ 2 ‘e benzer şekilde,
[
~
~
C l o = E ( l - u) ( l - u) T
]
~
é( l1 - u 1 ) 2
ê
= Eê
ê
ê
êë
~
~
~
~
(l1 - u 1 )( l2 - u 2 ) ..... ( l1 - u 1 )( ln - u n ) ù
ú
~
~
~
(l2 - u 2 ) 2
..... ( l2 - u 2 )(ln - u n )ú
ú
Simetrik
..
ú
~
( ln - u n ) 2
úû
olarak yazılabilir. Bir matrisin ümit değeri, elemanlarının ümit değeri bulunarak elde edilen
matristir. C l o nxn boyutlu simetrik bir matristir. Bu matrisin diyagonal elemanları varyans,
diagonal dışı elemanları kovaryans’tır.
[
~
σ i2 = E (li - u i ) 2
[
]
Varyans
~
~
σ ij = E (li - u i )( l j - u j )
]
Kovaryans
Dolayısıyla Kovaryans matrisi
Clo
é σ12
ê
σ
= ê 21
ê ....
ê
ëêσ n1
σ12
σ 22
..... σ1n ù
ú
..... σ 2n ú
.. ú
ú
σ 2n ûú
şeklinde yazılabilir. Burada E[.] operatörünün integral operatöründen ibaret oldu ğunu
hatırlayalım. Eğer lio ve l jo ölçülerinin hataları birbirlerinden bağımsız ise
[
] [
][
]
[ ]
~
~
~
~
σ ij = E (li - u i )( l j - u j ) = E (li - u i ) E (l j - u j ) = E[e i ]E e j = 0
s ij = 0 olur ve C l o diyagonal bir matrise dönüşür.
Yukarıdaki trilaterasyon örneğinde eğer alette kalibrasyon hataları mevcut değilse bir
kenarın ölçümünde yapılan hata başka bir kenar ölçümünün hatasından bağımsız olacak ve
dolayısıyla C l o matrisi diagonal olacaktır. Birbirlerinden bağımsız hatalar içeren ölçülere
korelasyonsuz ölçüler denir. Eğer kalibrasyon veya prosedür hataları mevcut ise gözlemlerin
hataları birbirine bağımlı olur. Bu taktirde C l o matrisi diyagonal olmaz. İki ölçünün
hatalarının birbirine bağımlılık derecelerini veren büyüklüğe korelasyon katsayısı denir ve
aşağıdaki gibi tarif edilir.
ρ ij =
σ ij
σ i.σ j
-1 £
ρ ij £ +1.
37
Burada si ve sj , lio ve l jo ’in standart sapmaları olup, rij katsayısının değeri -1 ile +1
arasındadır. Eğer rij negatif ise iki ölçüm hatası ters karelasyonludur. Yani birindeki hata
büyürken diğeri küçülmektedir. Aynı şekilde rij pozitif ise birinde hata artarken diğerinde
de artmaktadır.
c. Kovaryans Kuralı
Birinci bölümde belirtildiği gibi dengelemenin amacı bilmeyen parametreleri (x)
belirlemek ve aynı zamanda da bu parametrelerin hatalarını hesaplamaktır. Başka bir deyişle
gözlem hatalarını C l o kullanarak bilinmeyenlerin hatasını (Cx) hesaplamaktır. Bunun için
kovaryans matrisinin yayılma kuralları “Kovaryans Kuralı” açıklanacaktır. Bu kuralın
geliştirilmesi için gerekli bazı ifadeler şunlardır:
E[x + y] = E[x ] + E[y ]
E[kx] = kE[x]
(k = sabit)
E[A nu x u ] = A nu E[x u ]
( A nu = sabit matris)
[
] [ ]
E x Tlu A un = E x Tlu A un
( A un = sabit matris)
Şimdi kovaryans kuralını çeşitli direk model için geliştirelim.
i- İki çoklu değişken x = A l şeklinde ilintilidirler. Burada A=sabit ve C l verilmiş, C x
matrisi aranmaktadır.
E[l ] = μ l ,
E[x] = μ x
E[x ] = E[A l ] = A E[l ] = A μ l
[
C x = E (x - μ x )(x - μ x ) T
[
]
ve
x - μ x = A l - Aμ l = A( l - μ l ) dikkate alınırsa,
]
C x = A E (l - μ l )(l - μ l ) T A T = AC l A T
olur.
ii. İki çoklu değişken y = [ y1 y 2 ]T ve x = [x 1 x 2 x 3 ]T aşağıdaki gibi ilintilidir. x’in
kovaryans matrisi C x verilmiş olup, C y aranmaktadır.
y 1 = f1 ( x 1 , x 2 , x 3 )
y 2 = f 2 (x 1 , x 2 , x 3 )
38
Burada fi (i=1,2) lineer olmayan fonksiyonlardır. x‘deki küçük değişikliklerin y üzerindeki
etkisi
¶f
¶f
¶f
dy1 = 1 dx 1 + 1 dx 2 + 1 dx 3
¶x 1
¶x 2
¶x 3
dy 2 =
¶f 2
¶f
¶f
dx 1 + 2 dx 2 + 2 dx 3
¶x 1
¶x 2
¶x 3
veya matrisiyel gösterimde
dy 2,1 = J 2,3 dx 3,1 , J 2,3
æ ¶f1
ç
ç ¶x 1
=ç
¶f
çç 2
è ¶x 1
¶f1
¶x 2
¶f1 ö
÷
¶x 3 ÷
= Jakobiyan matrisi.
¶f 2 ÷
÷
¶x 3 ÷ø
¶f 2
¶x 2
şeklinde ifade edilir. Bu küçük değişiklik vektörü dx hata diye yorumlanırsa, bu ifade x’deki
dx hatasının y’de sebep olacağı dy hatasını verir. Bu ifadeden kovaryans matrisine
geçilebilir.
dy 2,1dy T2,1 = (J 2,3 dx 3,1 )(J 2,3 dx 3,1 ) T = J 2,3 (dx 3,1dx1T,3 )J 3, 2
T
olur. Her iki tarafın ümit değeri alınırsa,
[
] [
E dy 2,1 dy1T, 2 = E J 2,3 (dx 3,1dx 1T,3 ) J T3, 2
[
]
C y 2, 2 = J 2,3 E dx 3,1dx1T,3 J T3, 2 veya
]
C y = JC x J T
elde edilir.
Bu ifade kolayca genelleştirilebilir.
y n,1 = f m (x n ,1 )
æ ¶y
ise J m ,n = çç m
è ¶x n
ö
÷÷ ve
ø
C y m,m = J m,n C xn,n J Tn,m
Örnek: Bir uzaklık n kez ölçülmüş ve lio (i = 1,2, , , n ) elde edilmiştir. EDM aletinin duyarlığı
ise s = k 1 + k 2 l olarak verilmiştir. Burada k 1 cm biriminde, k 2 ise birimsiz bir katsayıdır.
i- Bu uzaklığın lˆ tahmin değerini ve bunun varyansını bulunuz.
ii-Ölçü hata vektörü r ‘yi ve bunun kovaryans matrisini bulunuz.
39
1 n
i-. lˆ = ∑ l io
n i=1
æ ¶lˆ
J =ç
ç ¶l
è 1
¶lˆ
¶l 2
(ortalama)
....
¶lˆ
¶l n
C ˆ = σ 2lˆ = J C l J T =
l
σ lˆ = ±
σ
n
ö æ1
÷=ç
÷ èn
ø
1
1ö
....
÷
n
nø
Cl = σ 2I
ve
σ2
n
lim σ lˆ ® 0
dolayısıyla
n ®¥
ve
lˆ ® μ olur.
ii-
ri = lˆ - li
ri =
n
æ l ko
ö
ì0 i ¹ k
1 n o o
çç - d ik l ko ÷÷ , burada d ik = í
l
l
=
å
k
i
å
n k =1
k =1 è n
ø
î1 i = k
æ r1 ö æç 1-nn
ç ÷
ç r2 ÷ ç 1n
çM ÷ = ç
ç ÷ ç
çr ÷ ç
è nø è
1
n
1-n
n
1 ö ælo ö
n ÷ ç1 ÷
1
ç o÷
n ÷ ç l2 ÷ \
÷
...
...
. ÷ çM ÷
1-n ÷ ç o ÷
n ø è ln ø
J=A
A
C r = AC l o A T = s 2 AA T
Diyagonal elemanlar =
(1 - n )2 +
n2
1
1
1 (1 - n ) + (n - 1) n - 1
+ 2 +L+ 2 =
=
2
n
n
n
n2
n
2
n-1
1- n 1
1
1- n n - 2 -1
Diyagonal dışı elemanlar = 2 n 2 + n 2 + L + n 2 = 2 n 2 + n 2 = n 2
æ nn-1
ç
1
2ç - n
Crˆ = σ ç
ç
ç
è
- n1 ...
n -1 ...
n
Ölçü sayısı büyükse,
ö
-1
n÷
1
-n÷
lim C rˆ = σ 2 I
÷
. ÷
n -1 ÷
n ø
n ®¥
Küçük ölçü sayısı durumunda ise rˆ vektörü elemanları birbirleriyle negatif korelasyonludur.
40
1
Korelasyon katsayısı r ij = - n - 1
d. Ağırlık kavramı
Genel olarak ölçülerin kovaryans matrisi ölçülerin mevcut duyarlık koşullarından ve alet
yapımcı firmaları tarafından sağlanan teknik dokümanlardan elde edilebilir. Örneğin EDM ve
GPS ölçülerinin hataları (standart sapmaları) s = k 1 + k 2 l şeklinde verilir. Bir teodolit ile
doğrultu ölçüsünün standart sapması, teodolit yatay dairesinin en küçük bölümüne eşit
alınabilir. Bu şekilde standart sapma belirlendikten sonra matrisi kurulabilir.
Clo
æ s12
0ö
÷
ç
÷
= Cr = ç
O
÷
çç
s 2n ÷ø
è0
Burada C l o notasyon olarak lo vektörünün kovaryans matrisini göstermektedir.Bundan sonra
C l o yerine C r kullanılacaktır. Ölçüler bağımsız alındığı için C l o diagonal’dir.
Bazı jeodezi problemlerinde ölçülerin standart sapmalarını ( s ) bilmek mümkün
olmayabilir. Örneğin kalibrasyonsuz bir EDM aletinin k 1 ve k 2 sabitleri ve s bilinmiyor
demektir. Diğer bir örnek ise nivelmandır. Nivelman ağlarında ölçülerin (iki düşey kontrol
arasındaki yükseklik farkı ) standart sapmasını önceden tahmin etmek çok güçtür. Bu gibi
durumlarda “ağırlık” kullanılır. Bir gözlemin ağırlığı o gözlemin diğerlerine göre daha az
veya daha çok duyarlı olduğunu gösteren bir katsayısıdır. Daha duyarlı ölçülerin ağırlığı
daha büyük olur. Yani ağırlık varyans ile ters orantılıdır. Ağırlığı büyük olan ölçünün sonuca
katkısı da büyük olur.
Pi a
1
σ i2
Ağırlık kavramını ve sonuca etkisini göstermek için aşağıdaki örnek ele alınıyor;
A
x
B
#
lio (m )
1
2
100.00
99.98
σ i (mm)
±1
±10
Bu iki ölçüyü kullanarak uzaklığın en iyi tahmin değerini bulunuz.
i- Önce gözlemlerin aritmetik ortalaması alınsın
l =
1 n o
∑ li = 99.99m
n i=1
41
Alet
EDM
Şerit
Bu l değerinin hatası ise kovaryans kuralı ile bulunur.
0ö
æ1
÷÷ mm 2
C l o = C r = çç
0
100
è
ø
æ 1 1 öæ 1 0 öæ1 / 2 ö
÷÷çç
÷÷mm 2 = 25,25 mm 2
C l = σ l2 = JCr J T = ç
÷çç
è 2 2 øè 0 100 øè1 / 2 ø
s l = m 5.03 mm ,
l = 99.99m m 5.03mm
ii-İkinci olarak her ölçü ağırlığı ile orantılı katkı yapsın
p1 α
1 1
=
σ12 1
p2 a
1
1
=
2
σ 2 100
Burada orantı katsayısını k ile gösterilirse p1= k, P2 = k / 100 olur. k katsayısını çeşitli
şekilde belirlenebilir. Örneğin p 1 + p 2 = 1 olsun.
101k
100
100
1
p1 + p 2 =
= 1 ise k =
dolayısıyla p1 =
ve p 2 =
olur.
100
101
101
101
)
Şimdi ağırlıklı ortalama l ve hatasını bulalım
)
l =
åp l
åp
i i
o
=
i
s l) 2
= (p1 p 2 )
100
1
100 +
99.98m = 99.9998m
101
101
æ σ12
ç
ç0
è
s l) = m 0.995mm
0 ö æ p1 ö
÷ ç ÷ = p1 2 s1 2 + p 2 2 s 2 2 = 0.9901 mm 2
2 ÷ çp ÷
σ2 ø è 2 ø
)
l = 999.9998m m 00.99m
)
Görüldüğü gibi x için l , l ‘den çok daha iyi bir tahminidir çünkü s l) @ m 1 mm ,
s l @ m 5 mm dir.
Şimdi konuya tekrar dönelim. Belirtildiği gibi p a 1 / σ 2
gösterilirse p = σ o 2 / σ 2
denir.
ps 2 = s 0
yazılabilir. Burada
so
2
Bu basit formül çoklu değişken için genellenebilir.
Pn ,n C rn , n = σ 2o I n ,n ,
C rn , n = σ o2 Pn ,1n
42
2
2
ve orantı katsayısı s o olarak
orantı katsayısına “Varyans faktörü”
Bazı dengeleme problemlerinde varyans bilinmediği zaman bir ağırlık matrisi (P) kurulursa
hangi ölçü ağırlığı diğerlerine göre onu tespit edilir. Dengelemede P matrisi kullanılır. Varyans
faktörü σ 2o bilinmediği için bu ile diğer bilinmeyenlerle birlikte dengelemede hesaplanır.
Ağırlık kullanılması gerektiren en tipik dengeleme problemi Nivelman’dır. Nivelman da
uzaklık arttıkça ağırlık azalır ve p i = k / S i kullanılır (S i km biriminde uzaklıktır).
e. Güvenirlik kavramı
Ölçülerin güvenirliği için aşağıdaki üç tür terim kullanılır:
Duyarlık (Precision) : Aynı büyüklük için yapılan tekrarlı ölçülerin birbirine yakınlığının
derecesini gösterir. Duyarlık sadece rasgele hataların etkisini içerir.
Y ü ks ek
du ya rlık
-ε
D ü şü k
du ya rlık
+ε
-ε
+ε
Doğruluk (Accuracy): Bir ölçünün gerçek değere yakınlığının bir ölçütüdür. Doğruluk
sistematik hata ve rasgele hatanın ikisini de içerir.
-ε
+ε
S i s t em atik h ata
Standart sapma (Uncertainty): Bir ölçüdeki hatanın düşmesi beklenen aralık
Aşağıda dairesel bir hedefe yapılan atışlar temsil edilmektedir.
43
Duyarlı, doğru
değil
Duyarlı değil,
doğru
Duyarlı değil,
Doğru değil
Duyarlı ve
doğru
Duyarlık -------------------• İç güvenirlik
Doğruluk -------------------• D ış güvenrlik
Sistematik hataların bulunmaması durumunda duyarlık ve doğruluk birbirine eşittir.
e. Sayısal Uygulamalar
(1) Şekilde gösterilen P1P2 = masafasi bir engel nedeniyle doğrudan ölçülememektedir.
Dolayısıyla bir P3 noktası tespit edilerek l1 ve l2 mesafeleri ve l2 yatay açısı aşağıdaki gibi
ölçülmüştür. Bilinmeyen x uzaklığını ve varyansını hesplayınız.
i
1 1200.000 m
2 3200.000 m
3 60o 00’ 00’’
P1
σi
lio
l1
±(1mm+1 ppm)
±(1mm+1 ppm)
±1”
x
l3
P3
Model:
P2
l2
x = l12 + l 22 - 2l1 l 2 cos l 3 = 2800.000 m
æ ¶x
Jakobian vektör J = çç
è ¶l1
¶x
¶l 2
(
¶x
¶l3
ö æ l1 - l 2 cos l3
÷÷ = ç
x
ø è
J 1,3 = - 0.142857 rad
σ l o = ± (1 mm + 10 -6 x 1200000 mm) = ±2.2 mm
1
σl o = ± (1 mm + 10 -6 x 3200000 mm ) = ±4.2 mm
2
3
1
rad
r' '
r=
l1l 2 sinl3 ö
÷
x
ø
0.928572rad 1.187691983mm
Gözlem kovaryans matrisi C l o
σl o = ±1' ' = ±
l 2 - l1 cos l3
x
180 x 3600
= 206265
p
44
)
Clo
æ σ 2o
ç l1
= çç 0
çç 0
è
0
σ l2o
2
0
æ
2
0 ö÷ ç 4.84 mm
ç
÷
0 ÷=ç
0
ç
2 ÷
σ l o ÷ çç
0
3 ø
è
0
17 .64 mm
2
0
ö
0 ÷
÷
0 ÷
1 ÷
÷
r 2 ÷ø
C x = σ 2x = JC l o J T
σ 2x = (
l1 - l 2 cos l3 2 2
l - l cos l 3 2
l l sinl3 2
) σlo + ( 2 1
)σ l o + ( 1 2
)σ l o = 48.4644 mm 2 \ σ x = ±6.962 mm
1
2
3
x
x
x
x = 2800.000 m ± 6.962 mm
(2) Bir P noktasının yüksekliğini belirlemek için mevcut kontrol noktası A dan şekildeki
eğik mesafe l1 ve zenit açısı l2 ölçülmüştür. Düşey kontrol noktasının ortometrik yüksekliği
H=1350.00±0.20 m dir. P noktasının yüksekliğini ve varyansını bulunuz.
i
σi
lio
1 2170.000 m
2 67o 00’ 00’’
hi
l1
±(5mm+5 ppm)
±5”
l2
ha
Alet ve işaret yükseklikleri
HA
ha= 1.40 ± 0.01 m
hi= 1.90 ± 0.01 m
olarak verilmiştir.
Model:
x = H A + h a + l1 cos l 2 - h h = 2197.3866 m
æ ¶x
J = çç
è ¶l1
(
¶x
¶l 2
J = 0.390731rad
¶x
¶H A
¶x
¶h a
¶x
¶h i
ö
÷÷ = (cos l 2
ø
- l1 sin l 2 1 1 1)
)
- 1997.495532 m 1 1 1
Gözlem kovaryans matrisi C l o
σ l o = ± (5 mm + 5x10 -6 x 2170000 mm ) = ±15.85 mm = ±0.01585 m
1
45
x=Hp
σ l o = ±5' ' = ±
2
5
rad
r' '
σ H A = ± 0.20 m
(
r = 206265
σ h a = ± 0.10 m
,
C l o = diag σ l2o
σ l2o
1
σ l2o
2
3
σ l2o
σ l2o
4
5
σ h i = ± 0.10 m
,
)
C x = σ 2x = JC l o J T
σ 2x = (cos 2 l3 )σ l2o + (-l1sin l 2 ) 2 σ l2o + σ 2H A = σ 2h a + σ 2hi = 0.042583 m 2 \ σ x = ± 0.2064 m
1
2
x = 2197.387 ± 0.206 m
(3) Bir P noktasının koordinatlarını belirlemek için şakilde gösterilen yatay mesafe ve
açıklık açısı ölçülmüştür. P nopktasının koordinatlarını ve kovaryans matrisini bulunuz.
i
y
σi
lio
1 1000.000 m
2 30o 00’ 00’’
P
±1 cm
±1”
l1
l2
x
x = l1 sin l 2 = x 1 = 500.000 m
y = l1 cos l 2 = x 2 = 866.0254 m
æ ¶x
ç
¶l
J =ç 1
ç ¶y
ç ¶l
è 1
Clo
æ σ 2o
l
= çç 1
ç 0
è
¶x
¶l 2
¶y
¶l 2
ö
÷ æ sin l
1
÷=ç
÷ ç cos l
2
÷ è
ø
l1 cos l 2 ö æ 0.5
866.0254 m ö÷
÷=ç
- l1 sin l 2 ÷ø çè 0.866025 - 500.000 m ÷ø
-4
2
0 ö÷ æç10 m
=ç
0
σ l2o ÷÷ ç
2 ø
è
ö
÷
2÷
rad
÷
r' ' 2
ø
0
C x = σ 2x = JC l o J T
1' '
σ 2x1 = (sin 2 l 2 )σ l2o + (l1cos l 2 ) 2 σ l2o = 4.262829x10 -5 m 2 \ σ x = ± 0.0065 m
1
1
2
σ 2x 2 = (cos 2 l 2 )σ l2o + (-l1sin l 2 ) 2 σ l2o = 8.087610x10 -5 m 2 \ σ x = ± 0.0090 m
1
1
2
σ 2x1x 2 = sin l 2 cos l 2 σ l2o + l1cos l 2 (-l1sin l 2 ) σ l2o = 3.312357x10 -5 m 2
1
2
46
r12 =
σ x1x 2
σ x1 σ x 2
= 0.566
x 1 = x = 500.000 ± 0.0065 m
y 1 = y = 866.0254 ± 0.0090 m
,
Bu problemde y koordinatının hatasının neden x koordinatının hatasından daha büyük
çıktığını değerlendiriniz.
(4) Bir P noktasının koordinatları x=3 ± 0.0014 m , y= 4 ± 0.0014 m olarak verilmiştir.
Bu noktanın kutupsal koordinatlarını ve hatalarını bulunuz.
y=x2
Kutupsal koordinatlar
P
æ y1 ö æ s ö
y=ç ÷=ç ÷
ç y ÷ ça÷
è 2ø è ø
s
a
olarak gösterilsin.
x1
x2
x=x1
y 1 = x 12 + x 22 = 5.000 m
æx
y 2 = tan -1 çç 1
è x2
æ ¶y1
ç
¶x
J =ç 1
ç ¶y 2
ç
è ¶x 1
ö
÷÷ = 36 o .869 897 = 36 o 52' 11".6315
ø
¶y1
¶x 2
¶y 2
¶x 2
ö æ x1
÷ ç
÷ = ç y1
÷ ç x2
÷ ç 2
ø è y1
x2
y1
x
- 12
y1
ö æ 3
4 öæ rad ö
÷ ç
÷
֍
÷=ç 5
5 ֍
÷
÷ ç 4
3 ÷ç 1 ÷
- ֍
÷ ç
÷
25 øè m ø
ø è 25
æ2 0ö
÷ x10 -6 m 2 = 2 x10 -6 I m 2
Cx = ç
ç0 2÷
è
ø
æ 1r 2
C y = 2 x10 - 6 ç
ç 1/ m
è0
σ 2y1 = 2 x 10 -6 m 2
σ 2y 2 = 8 x 10 -6 rad 2
01 / m
0.041 / m
\
\
2
Kovaryans kuralı: C y = JC x J T
ö
÷
÷
ø
σ y = ±0.0014 m
1
σ y = ±0.002828 rad = ±58".34
2
47
4. EN KÜÇÜK KARELER METODU İLE ÇÖZÜMLER
a. En küçük kareler prensibi
İkinci ve üçüncü bölümlerde görülen konuları kısaca özetleyerek başlayalım.
Dengelemede kullanılan matematik modeller ve bunlardan elde edilen gözlem denklemleri
şöyleydi.
Bileşik Model
: f (x, l ) = o
; A k ,u δ u ,1 + B k ,n rn ,1 + w k ,1 = o
Dolaylı Model
:
l = f (x )
;
rn ,1 = A n ,u δ u ,1 + w n ,1
Şart Model
: g( l ) = o
;
B m ,n rn ,1 + w m ,1 = o
Burada x ve xo bilinmeyenlerin (parametrelerin) gerçek ve yaklaşık değerleri, l ve l o
gözlenebilirlerin gerçek ve gözlem değeri; x = xo + d , d düzeltme vektörü, l = l o + r, r
gözlem hatası vektörü olarak elde edilmişti. İzah edildiği gibi gözlem vektörü sistematik ve
kaba hatalar içermiyor, yalnızca raslantısal hatalar mevcutsa bu l o vektörü normal dağılımlı
bir çoklu değişkendir.Yani l o à n( l , C l o ) dir. Burada C l o , l o vektörünün kovaryans
matrisidir. Aynı şekilde r vektörü de normal dağılımlı çoklu değişkendir ve r à n (o, C r ) dir.
¶l o
T
= -I ve Cl o = J Cr J yani Cl o = C r dir. Dolayısıyla r’nin
l o = l - r olduğundan J =
¶r
olasılık yoğunluk fonksiyonu;
f (r ) =
1
(2 π)
n
2
det C r
{
exp - 12 r T C -r1r
}
olarak yazılabilir. Gözlem denklemlerindeki bilinmeyen vektörler δ ve r öyle belirlenmelidir
ki, bu çözüm aynı zamanda ihtimali en yüksek olan çözüm olsun. Yani aranan r vektörü
ihtimal yoğunluk fonksiyonu f(r)’yi de maksimum yapmalıdır. f(r)=maksimum, f(r) içinde r
vektörü bir tek kuvvet terimi içindedir ve f(r)’nin maksimum olması için
exp - 12 r T C -1
r r Þ maksimum olmalıdır. Aranan r vektörünün bu fonksiyonu maksimum
{
}
yapabilmesi için ise r T C -r1r = min imum olmalıdır. Dolayısıyla aranan r vektörü hem δ ile
birlikte gözlem denklemlerini sağlamalı ve hem de r T C -r1r fonksiyonunu minimum
yapmalıdır. Bu formüle edilen problemler şöyle özetlenebilir:
Bileşik Model:
r T C r-1r = min ve A k ,u δ u ,1 + B k ,n rn ,1 + w k ,1 = o olduğuna göre r ve d ‘yı bulunuz.
Dolaylı Model:
r T C r-1r = min ve rn ,1 = A n ,u δ u ,1 + w n ,1 olduğuna göre r ve d ‘yı bulunuz.
Şart Modeli :
r T C r-1r = min ve B m ,n rn ,1 + w m ,1 = o olduğuna göre r ‘yi bulunuz.
Bu üç problem karekter olarak hemen hemen aynıdır. Burada önce bileşik model problemi
çözülecektir. Dolaylı model probleminin çözümü bileşik çözümde k = n ve B k,n = -I
alınarak, şart modeli probleminin çözümü; bileşik modelde k = m ve A k,u = o k ,u alınarak
bulunacaktır.
48
Bu tür problemlere maksimum-minumum problemleri denir. Bilinmeyenler verilen bir
fonksiyonu yani r T C r-1r fonksiyonunu minumum yapacak ve aynı zamanda da gözlem
denklemlerini de sağlayacaktır. Bu tür problemlerin çözümü için standart yöntem Lagrange
çarpanları metodudur. Bu metodun açıklanması için aşağıdaki basit örnek verilmiştir.
Lagrange çarpanları metoduna örnek:
Şekilde gösterilen yarıçapı 3 olan daire üzerinde ve P(4,3) noktasına en yakın olan noktayı
bulunuz? Problemin çözümü açıktır. Aranan nokta OP doğrultusu ile dairenin kesim
noktasıdır.Yani
y
x = rsinα p , y = rcosα p ve r = 3 tür.
α p = tan
-1
Q
4
x
= tan -1 = 53 0 .13010235
3
y
a
Şimdi aynı çözümü Lagrange çarpanları yoluyla elde edelim.
d = r 2 + rp2
O
d
P
rp=5
ap
3
x
2r rp cos (a p - a ) = min yapacak şekilde r = 3 (daire üzerinde) olacaktır.
(
)
Φ(r , α ) = r 2 + rp2 - 2rrp cos α p - α + 2λ( r - 3) = min
¶Φ
¶Φ
¶Φ
=0,
=0
= 0 şartlarını sağlayacaktır.
¶r
¶α
¶λ
r - rp cos α p - α
¶Φ
=
+ 2λ = 0
¶r
r 2 + rp2 - 2rrp cos α p - α
olmalıdır. Aranan çözüm,
(
¶F
=
¶α
(
)
rrp sin (α p - α )
)
r + rp2 - 2rrp cos(α p - α )
2
¶Φ
= 2(r - 3) = 0
¶λ
= 0 veya rrp sin (α p - α ) = 0
: r=3
İkinci denklemde ise r ¹ 0, rp ¹ 0 dolayısıyla sin(a p - a) = 0 ve α = α p , α = α p + π bulunur.
Bu çözümlerden α = α p
probleminde
yazılabilir :
de
minumum,
α = αp + π
ise maksimumu verir. Dengeleme
aynı mantık kullanılarak bileşik
model için fonksiyonel şöyle
-1
T
r1T,n C n,
n rn ,1 + 2λ 1, k ( A k,u δ u,1 + B k,n rn,1 + w k,1 ) Þ minimum
Buradaki
λ k ,1 vektörüne Lagrange çarpanı vektörü ve bu şarta ise En küçük kareler şartı
denir.
49
b. Normal Denklemler ve Çözümleri
Yukarıda elde edilen en küçük kareler prensibi yani fonksiyoneli Φ(r, δ, λ ) kullanılarak
Φ = min şartını sağlayan r , δ, λ değerlerini hesaplayalım.
¶F
= (C -r1 r ) T + r T C r-1 + 2λ T B = o veya
¶r
C r-1n,n rn,1 + B Tn, k λ k ,1 = o
n adet
(4.1)
¶F
= 2( Aδ + Br + w ) T = o
¶λ
veya
A k,u δ u,1+ B k,n rn,1 + w k,1 = o
k adet
(4.2)
¶Φ
= 2λ T A = o
¶δ
veya A Tu, k λ k,1= o
u adet
(4.3)
Burada elde edilen üç ifade toplanarak (n+k+u) adet denklem elde edilir. Buna karşılık
bilinmeyen sayısı ise rn , δ u , λ k vektörleri bileşenlerinin sayısı, yani (n+k+u) dir. Dolayısıyla
bu üç denklem takımının çözülmesiyle r, δ, λ vektörleri tayin edilebilir. Çözüm için
eleminasyon yöntemi kullanılacaktır. (4.1) nolu denklemden
r = -C r B T λ
(4.4)
eşitliği (4.2) de yerine konursa
Aδ+ B (-C r B T λ ) + w = o veya (BC r B T )λ = Aδ+w
Burada B Cr BT simetrik bir kare matristir. Bu matrisin tersi,
M = (BC r B T ) -1
(4.5)
olarak gösterilirse bu ifade
λ= M (Aδ+w )
(4.6)
şeklini alır. Bu denklem (4.3) te yerine konursa,
A T M A δ + A T Mw = o
şeklinde Normal Denklemler elde edilir. ATMA normal denklemler katsayılar matrisi
olarak adlandırılır ve bu matris simetrik olduğundan tersi alınarak,
(
δˆ = - A T M A
)
-1
ATM w
elde edilir. N = A T M A tanımlamasıyla,
50
δˆ = - N -1 A T M w
yazılabilir. Bu (4.6) ve (4.4) eşitliklerinde dikkate alınırsa,
rˆ = - C r B T M ( A δˆ +w )
elde edilir. Burada (^) işareti büyüklüğün gerçek değerini değil, en küçük kareler yöntemiyle
hesaplanan tahmin değerini ifade etmektedir.
İşlem adımları özetle şu şekildedir:
A k,u δ u,1+ B k,n rn,1 + w k,1 = o
M k,k = (B k,n C rn,n B Tn,k ) -1
N u,u = A u,k T M k,k A k,u
δˆ u,1 = - N -u,1u A Tu,k M k,k w k,1
rˆ n,1 = -C rn,n B Tn, k M k,k ( A k,u δˆ u,1 + w k,1 )
elde edilir. δˆ ve rˆ bulunduktan sonra bilinmeyenler ve düzeltilmiş gözlemler ise
xˆ = x o + δˆ
lˆ = l o + rˆ
eşitlikleriyle hesaplanır.
c. Kovaryans Matrisleri ve Varyans Faktörü
Daha önce de belirtildiği gibi xˆ ve lˆ vektörleri dengelemenin amaçlarından birincisini
teşkil etmektedir. Bu büyüklüklerin duyarlıkları, yani kovaryans matrislerinin de , bulunması
gerekmektedir. Sadece bileşik model yoluyla elde edilen büyüklüklerin kovaryans
matrislerinin elde edilmesine ilişkin eşitlikler verilecek olup, diğer modeller için kovaryans
matrisleri bileşik modelden yararla türetilecektir. Bileşik model f(x, l ) =o şeklinde idi. Bu
modelin Taylor serilerine açılımı ise
f (x , l ) = f ( x o , l o ) +
¶f
¶x
xo , l o
δ+
¶f k
¶l j
r=o
xo , l o
şeklinde elde edilmişti. Gözlem denklemleri
A=
¶f
¶x
x o ,l o
,
B=
¶f
¶l
xo ,l o
,
w = f (x o , l o )
A d +B r + w = o
51
kısaltmalarıyla,
şeklinde yazılmıştı. Şimdi bu ilişkiler kullanılarak kovaryans matrisleri elde edilecektir.
Öncelikle yukarıda geçen büyüklüklerin hangilerinin çoklu değişken olduğu tespit
edilecektir. Bir vektörün çoklu değişken olması için vektörün bir ihtimal yoğunluk
fonksiyonu ile belirtilen bir dağılıma uyması, bir kovaryans matrisi ve gerçek değer vektörü
bulunması gerekmektedir. Bu durumda l o ve r böyle çoklu değişken vektörlerdir. Genelde
xo vektörü ihtiyari olarak seçilen bir vektör olup doğrudan gözlenmez. Bu takdirde xo
vektörü sabit sayılardan oluştuğu farz edilebilir. Diğer bir önemli bir husus ise, bir çoklu
değişkenin fonksiyonunun da çoklu bir değişken olmasıdır. Bu konu 3. Bölümde
açıklanmıştır. Bu bilgiler ışığında w, δˆ , xˆ , lˆ vektörlerininde çoklu değişken oldukları
görülür. Şimdi bunların kovaryans matrislerini bulalım.
(1) w ‘ nin kovaryans matrisi (Cw)
w = f (x o , l o )
ve C l o = C r verilmiş farz edilirse, kovaryans kuralından
C w k k = JC r J T ve
J=
¶w
¶l
o
=
¶f
¶l o
=B
olduğundan,
C w k k = B k,n C rn,n B Tn,k bulunur. Yani C w k k = M -1
k,k
(2) δˆ ’nın kovaryans matrisi ( C δˆ )
¶δˆ
= - N -1 A T M
ve
olduğuna
C w = M -1
¶w
C δˆ = JC w J T = (-N -1 A T M )M -1 (-N -1A T M ) T ve Burada N ve M simetrik kare
-1 T
δˆ = -N A Mw
,
J=
göre
matrislerdir. NT=N, MT=M dir. Dolayısıyla,
C δˆ = N -1A T MAN -1 = N -1NN -1 = N -1
u,u
(3) xˆ ’ in kovaryans matrisi (C xˆ ) :
o
xˆ = x + δˆ
ve C δˆ = N -1 ,
J=
¶xˆ
=I,
¶δˆ
C xˆ = IC δˆ I T = N -1
(4) rˆ ’nin kovaryans matrisi (C rˆ ) :
rˆ vektörü kovaryans matrisi bilinen bir çoklu değişkenin fonksiyonu olarak yazılır ve
kovaryans yayılma kuralı uygulanır.
rˆ = -C r B T M ( Aδˆ + w )
ve
δˆ = - N -1 A T Mw ifadeleri birleştirilirse,
52
rˆ = -C r B T M (- AN -1 A T M + I)w ,
C w = M -1 olduğundan C rˆ = JC w J T
ile
hesaplanabilir.
¶rˆ
= -C r B T M (- AN -1 A T M + I) = C r B T M ( AN -1 A T M - I )
¶w
J=
C rˆ = C r B T M ( AN -1 A T M - I )M -1 (MAN -1A T - I)MBC r
C rˆ = C r B T (MAN -1 A T MAN -1 A T M - MAN -1 A T M - MAN -1 A T M + M )BC r
C rˆ = C r B T (M - MAN -1 A T M )BC r = C r B T KBC r
;
K = M - MAN -1 A T M
(5) lˆ ’ın kovaryans matrisi ( C lˆ )
eşitliğinde rˆ = -C r B T M (- AN -1A T M + I)w ve w = f (x o , l o ) yerine konursa,
lˆ = l o + rˆ
lˆ = l o + C B T M(AN -1 A T M - I) f(x o , l o )
r
bulunur. Bu eşitliğin sağ tarafında bir tek çoklu değişken ( l o ) vardır ve C l o = C r
bilinmektedir.
J=
¶lˆ
¶l o
= I + C r B T M ( AN -1 A T M - I)
¶f
¶l o
ve
¶f
¶l o
=B
J = I + C r B T M ( AN -1A T M - I)B = I - C r B T KB
Clˆ = JCl o J T = (I - Cr B TKB) Cr (I - B TKBCr )
C lˆ = C r - 2C r B T KBC r + C r B T KBC r B T KBC r = C r - 2C rˆ + C rˆ
C lˆ = C r - C rˆ
(6) Aposteriori Varyans Faktörü ( σˆ 2o )
Yukarıda , gerek dengeleme ve gerekse kovaryans hesaplarında gözlem kovaryansı
C o = C r ’nın önceden ve doğru olarak bilindiği kabul edilmişti. Eğer bu kabul gerçekten
l
doğru ise; rˆ T C r-1rˆ raslantısal değişkeni c2 (ki-kare) değişkeni olacak ve değeride
dengelemenin serbestlik derecesine yani (k-u)’ya eşit olacaktır . Bunun ispatı Dengeleme
II’ye bırakılmıştır. Bu rˆ T C r-1rˆ kuadratik ifadesinin serbestlik derecesine oranına aposteriori
varyans faktörü σˆ 2o denir ve
σˆ 2o =
rˆ T C r-1rˆ
k-u
ile hesaplanır. Eğer Cr diagonal ise yani
53
éσ 12
ê
0
Cr = ê
ê .
ê
êë 0
0
σ 22
.
0
n
rˆi2
i =1
σ i2
rˆ T C r-1rˆ = å
0ù
ú
0ú
. . ú
ú
. σ 2n úû
.
.
ise
olacaktır. Dengeleme sonunda σˆ 2o değeri hesaplanır ve bu değer aşağıdaki şekilde irdelenir :
Eğer σˆ 2o >1 ise ya bazı gözlemlerde kaba hata mevcuttur, yada σ i2 değerleri gerçek ölçülere
kıyasla çok iyimserdir. Yani gerçek ölçülerin varyansları farzedilen σ i2 değerlerinden
büyüktür . Bu ise ölçmelerin gereken hassasiyetle yapılmamış olduğunu gösterir.
Eğer σˆ 2o < 1 ise ölçülerin ( l o ) hassasiyetinin farzedilen σˆ 2o değerlerinden daha iyi olduğunu
yani C l o = C r matrisinin kötümser şekilde kurulduğunu gösterir.
Eğer σˆ 2o = 1 ise ölçümler
kaba
hata içermemekte C l o matriside ölçülerin
gerçek
hassasiyetini yansıtmaktadır şeklinde yorumlanır.
Buradaki kritik durum σˆ 2o >1 halidir. Bu durumda problem eğer kaba hatalı ölçülerden
kaynaklanıyorsa bunlar belirlenir ve gözlemlerden ayıklanır ve dengeleme tekrar edilir. Eğer
kaba hata olmamasına rağmen σˆ 2o >1 ise bunun için dengelemeyi tekrar etmeye gerek
yoktur, ancak bütün kovaryans matrisleri σˆ 2o ile çarpılarak büyütülür. Bu konunun detaylı
açıklaması daha sonra yapılacaktır.
Bileşik model için elde edilen sonuçların özeti şu şekildedir:
A δ +B r + w =o
;
C
M = (BCr B T )-1
;
N = A T MA
lo
= Cr
δˆ = - N -1A T M w
rˆ = -C r B T M ( A δˆ + w ) ;
C rˆ = C r B T (M - MAN -1 A T M )BC r
xˆ = x o + δˆ
;
C xˆ = C δˆ = N -1
lˆ = l o + rˆ
;
C lˆ = C r - C rˆ
;
f(xˆ, lˆ ) ~
= o Sonuç kontrol
σˆ 2o =
rˆ T C r-1rˆ
k-u
54
d. Varyans Faktörü Önceden Bilinmediğinde Çözüm
Yukarıdaki dengeleme hesabında gözlemlerin kovaryans matrisinin, yani
Cl o = Cr
matrisinin verildiği varsayılmıştı. Bu ise iyi kalibre edilmiş teodolit ve EDM ölçülerinde
kısıtlayıcı bir varsayım değildir. Çünkü bu aletlerle elde edilen gözlemlerin standart
sapmaları ve varyansları hesaplanabilir. Buna ilişkin örnekler 3. bölüm sonunda verilmişti.
Fakat nivelman ve bazı GPS ölçmelerinde aletler kalibrasyonlu olmasına rağmen C l o matrisi
bilinmemektedir. Böyle durumlarda yapılacak işlem ise gözlemlerin göreli hassasiyetlerinin
tahmin edilerek gözlemlere birer ağırlık vermektir. Bu gözlem ağırlıkları kullanılarak
diagonal bir ağırlık matrisi (P) kurulur.
Üçüncü bölümde görüldüğü üzere C r = σ o2 P -1 dir. Bu ifadelerde P bilinmekte fakat C r
ve varyans faktörü σ o2 bilinmemektedir. Yukarıdaki çözümde C r = σ o2 P -1 ifadesi yerine
konursa,
M = (Bs 2o P -1B T ) -1 =
N = A T MA = A T
1
σ o2
1
s 2o
(BP -1B T ) -1 =
M' A =
1
σ 2o
1
s 2o
M'
N'
;
M ' = (BP -1B T ) -1
;
N' = A T M ' A
elde edilir. Şimdi bu bilinen M’ ve N’ matrislerini kullanarak çözümleri elde edelim.
1
δˆ = - N -1 A T M w = -σ o2 N' -1 A T 2 M ' w
σo
;
1
rˆ = -C r B T M ( Aδˆ + w ) = s o2 P -1 B T 2 M ' ( Aδˆ + w ) ;
so
xˆ = x o + δˆ
δˆ = - N' -1 A T M ' w
rˆ = - P -1 B T M ' ( Aδˆ + w )
lˆ = l o + rˆ
;
bulunur. Dolayısıyla çözüm vektörleri xˆ ve lˆ elde edilmiş olur. Fakat çözüm vektörlerinin
kovaryans matrisleri için σ 2o değeri gerekmektedir. Yani C l o = C r matrisine ihtiyaç vardır.
Buda şu şekilde bulunur. Daha önce belirtildiği gibi şayet C r matrisi doğru ise ve kaba
hatalarda mevcut değilse varyans faktörü
rˆ T C r-1rˆ
= 1 olur. Burada C r = σ o2 P -1 yerine
k-u
konulursa,
rˆ T
1
P rˆ
σ o2
=1
k-u
ve
σˆ 2o =
rˆ T P rˆ
k-u
55
elde edilir ve Cˆ r = σˆ o2 P -1 hesaplanabilir. Yani dengeleme yolu ile gözlemlerin hassasiyetini
ˆ =C
ˆ o matrisi hesaplanmış olur. Diğer kovaryans matrisleri de benzer şekilde
gösteren C
r
l
hesaplanır.
ˆ =C
ˆ ˆ = N -1 = σˆ 2 N ' -1
C
xˆ
o
δ
ˆ ˆ =C
ˆ B T (M - MAN -1 A T M )BC
ˆ
C
r
r
r
1
1
1
ˆ ˆ = σˆ 2 P -1B T ( M 'C
M ' Aσˆ o2 N' -1 A T 2 M ' )Bσˆ 2o P -1
r
o
2
2
σˆ o
σˆ o
σˆ o
ˆ ˆ = σˆ 2 P -1B T (M '-M ' AN ' -1 A T M ' )BP -1
C
o
r
ˆˆ =C
ˆ -C
ˆ ˆ = sˆ 2 P -1 - C
ˆˆ
C
r
r
o
r
l
σ 2o bilinmediğinde bileşik model çözümünün özeti aşağıdadır.
A δ +B r + w =o
(
M' = BP -1 B T
)
-1
;
Cl o = Cr
;
N' = A T M ' A
;
ˆ ˆ = σˆ 2 P -1 B T (M '-M ' AN ' -1 A T M ' )BP -1
C
o
r
δˆ = - N' -1 A T M ' w
(
rˆ = - P -1B T M ' Aδˆ + w
)
xˆ = x o + δˆ
;
ˆ ˆ =C
ˆ ˆ = σˆ 2 N' -1
C
x
o
δ
lˆ = l o + rˆ
;
ˆ ˆ = sˆ 2 P -1 - C
ˆˆ
C
o
r
l
σˆ 2o =
rˆ T P rˆ
;
k-u
ˆ = σˆ 2 P -1
C
r
o
e. Dolaylı Model Dengelemesi Çözümleri
Yukarıda elde edilen bileşik model çözümleri kolayca dolaylı model çözümüne
dönüştürülebilir. Bileşik modeldeki A k ,u δ u ,1 + B k ,n rn ,1 + w k ,1 = o yerine dolaylı modeldeki
rn,1 = A n ,u δ u ,1 + w n ,1 olduğu hatırlanırsa k=n, Bnn =-I olmaktadır.
C r verildiği durumda çözüm eşitlikleri:
(
M = BC r B T
)
-1
= C r -1
N = A T MA = A T C r-1 A
δˆ = - N -1 A T C r-1 w
(
;
)
rˆ = -C r B T M Aδˆ + w = Aδˆ + w ;
xˆ = x o + δˆ
lˆ = l o + rˆ
C xˆ = C δˆ = N -1
56
C rˆ = C r B T (M - MAN -1 A T M) BC r = C r - AN -1 A
C lˆ = C r - C rˆ
σˆ 2o =
;
C lˆ = AN -1 A T
rˆ T C r-1rˆ
n-u
lˆ @ f (xˆ)
sonuç kontrol
olarak elde edilir.
P verildiği durumda çözüm eşitlikleri:
rˆ T C r-1rˆ
n-u
M' = P
;
σˆ 2o =
N' = A T PA
;
ˆ = σˆ 2 P -1
C
r
o
δˆ = - N' -1 A T Pw
;
ˆ =C
ˆ ˆ = sˆ 2 N'-1
C
xˆ
o
δ
rˆ = Aδˆ + w
;
ˆ ˆ = σˆ 2 (P -1 - AN' -1 A T )
C
o
r
;
ˆ = σˆ 2 P -1 - C
ˆ
C
o
rˆ
lˆ
xˆ = x o + δˆ ;
lˆ = l o + rˆ
lˆ @ f (xˆ)
sonuç kontrol
f. Şart Model Dengelemesi Çözümleri
Şart modelinde gözlem denklemleri B m,n rn ,1 + w m,1 = o olduğundan, bileşik modelde k=m ve
A=o alınırsa şart modeline dönüşüm gerçekleştirilir.
C r verildiği durumda çözüm eşitlikleri:
;
B r+w =o
Cr
(
M = BC r B T
)
-1
rˆ = -C r B T Mw
lˆ = l o + rˆ
σˆ 2o =
;
C rˆ = C r B T MBC r
C lˆ = C r - C rˆ
;
g (lˆ) = o
rˆ T C r-1rˆ
m
;
sonuç kontrol
P verildiği durumda çözüm eşitlikleri:
(
M' = BP -1B T
)
-1
;
rˆ = - P -1B T M ' w
lˆ = l o + rˆ
;
;
rˆ T Prˆ
m
2 -1 T
ˆ
C rˆ = σˆ o P B M ' BP -1
σˆ 2o =
ˆ = σˆ 2 P -1 - C
ˆ
C
o
rˆ
lˆ
ˆ = σˆ 2 P -1
C
r
o
g (lˆ) = o
sonuç kontrol
57
Şart modelindeki bilinmeyen rˆ ve dolayısıyla lˆ bulunduktan sonra esas bilinmeyen
parametreler xˆ ve ilgili kovaryans matrisi C xˆ bulunması için yukarıda ifade edilen
büyüklüklerden yararla direkt model kurularak xˆ hesaplanır.
xˆ = f (lˆ)
Kovaryans matrisi ise kovaryans yayılma kuralından yararla hesaplanır.
¶xˆ
; C xˆ = JC lˆ J T
J=
¶l
h. Sayısal Uygulamalar
(1) Şekildeki yatay konum probleminde C1 ve C2 nokta koordinatları hatasız verilmiş
olup P noktasının koordinatlarını belirlemek amacıyla lio (i =1,2,3) ölçüleri yapılmıştır.
Verilenler:
P
l1
l2
l3
C1
C2
x
(a) Dolaylı modele göre ölçüleri dengeleyerek
i
xi(m)
yi(m)
1
2
0.000
10000.000
0.000
0.000
i
lio
8341.415 ± 0.02 m
9167.600 ± 0.02 m
59o 09’ 20’’± 1’’
1
2
3
xˆ , rˆ , lˆ , σˆ 2o , C xˆ , C rˆ , C lˆ büyüklüklerini hesaplayınız.
(b) Şartlı modele göre ölçüleri dengeleyerek rˆ , lˆ , σˆ 2o , C rˆ , C lˆ büyüklüklerini
hesaplayınız.
(c) Şartlı model dengelemesinde elde edilen lˆ ve C lˆ ‘den yararla
koordinatlarını (x,y) ve kovaryans matrisini hesaplayınız.
Dolaylı Model : (n=3, u=2, m = n-u = 1)
l1 = ( x - x 1 ) 2 + (y - y1 ) 2
l 2 = ( x - x 2 ) 2 + (y - y 2 ) 2
l3 = tan -1
y - y1
x - x1
Bilinmeyenlerin yaklaşık değer hesabı
xo=l1cos l3 = 4276.718 m
yo=l1sin l3 = 7161.625 m
d1o = ( x o - x 1 ) 2 + (y o - y 1 ) 2 = 8341.4141 m
d o2 = ( x o - x 2 ) 2 + (y o - y 2 ) 2 = 9167.5967 m
Taylor serilerine açınımı:
58
P noktasının
r1 =
r2 =
x o - x1
d 1o
xo - x2
r1 = -
d o2
o
δx +
y o - y1
δx +
yo - y2
y - y1
2
d 1o
d 1o
δx +
d o2
o
δy + d1o - l1o
x - x1
2
d 1o
δy + d o2 - l o2
δy + atan(
y o - y1
o
x - x1
) - l 3o
æ xo - x
y o - y1 ö÷
ç
1
o
ç
d 1o ÷÷ æ 0.512710
0.858562 ö
ç od 1
÷
y o - y1 ÷ ç
ç x - x1
ç - 0.624295
÷
0
781189
A=ç
.
=
÷
o
o
ç
÷
d
d
2
2
ç
÷ ç
-4
6.146548x10 -5 ÷ø
ç y o - y 1 x o - x 1 ÷ è1.029277x10
ç÷
2
2
ç
÷
d 1o
d 1o
è
ø
ö
æ
÷ æ - 9 x 10 -4 ö m
ç
o
o
d
l
1
1
÷
÷ ç
ç
÷ = ç - 3.3 x 10 -3 ÷ m
w =ç
d o2 - l 2o
÷
÷ ç
ç
o
ç -1 y - y1
o ÷ ç 2.15423x10 -8 ÷ rd
- l1 ÷ è
ø
ç tan
x o - x1
ø
è
ö
æ 4.10 -6 m 2
0
0
÷
ç
÷
Cr = ç
0
4.10 -6 m 2
0
÷
ç
ç
0
0
2.35044.10 -11 rd 2 ÷
ø
è
æ 2082.264102 - 387.910517 ö
æ 4.902 0.538 ö
÷ , N -1 = C ˆ = ç
÷ x10 -3 m 2
N = A T C r-1 A = ç
δ
ç - 387.910517 3529.199932 ÷
ç 0.538 2.893÷
ø
è
ø
è
æ - 0.00146 ö
÷ ,
δˆ = - N -1 A T C -r 1 w = ç
ç 0.00220 ÷
è
øm
æ 4276.7165 ö
÷ ,
xˆ = x o + δˆ = ç
ç 7161.6272 ÷
è
øm
æ 0.234x10 -3 ö m
ç
÷
rˆ = Aδˆ + w = ç - 0.669x10 -3 ÷ m ,
ç
÷
ç 3.0734x10 -7 ÷ rd
è
ø
æ 8341.4152 ö m
ç
÷
lˆ = l o + rˆ = ç 9167.5993 ÷ m
ç
÷
ç1.0324595226÷ rd
è
ø
æ 0.1044.10 -4
ç
-1
C rˆ = C r - AN A = ç
ç
ç
sim .
è
æ 3.895.10 -4
ç
C lˆ = AN -1 A T = ç
ç
ç
è
- 0.2978.10 -4
0.8495.10 -4
2.978.10 -5
3.150.10 - 4
1.367.10 -8 ö÷
- 3.899.10 -8 ÷
÷
1.789.10 -11 ÷
ø
1.367.10 -8 ö÷
3.899.10 -8 ÷
÷
5.605.10 -12 ÷
ø
59
C xˆ = C δˆ = N -1
sˆ 2o =
ˆr T C r-1 ˆr
= 0.00528
1
Yorum: Cr kötümser oluşturulmuş, ölçüler öngörülenden daha duyarlı ölçülmüş,
istatiksel modelin geliştirilmesi gerekli.
Sonuç kontrol : lˆ @ f (xˆ)
lˆ1 - ( xˆ - x 1 ) 2 + (yˆ - y1 ) 2 = -1.82x10 -5
lˆ2 - ( xˆ - x 2 ) 2 + (yˆ - y 2 ) 2 = -1.29x10 -5
l3 - tan -1
y - y1
= 4.02x10 -14
x - x1
Şartlı Model :
l 22 - l12 + 2l1 x 2 cosl3 - x 22 = 0
li = lio + ri olduğu dikkate alınıp Taylor serisine
,
açılırsa,
(-2l1o + 2x 2 cosl3o ) r1 + 2l 2o r2 - 2l1o x 2 sinl 3o r3 +
(
B = - 2l1o + 2x 2 cosl3o
w
2
= l 2o
2
- l1o
2l 2o
)
2
2
l 2o - l1o + 2 l1o x 2 cosl3o - x 22 = 0
- 2l1o x 2 sinl 3o = (- 6428.6498 18335.2 - 143232513.298)
+ 2 l1o x 2 cosl3o - x 22 = -57.68495 m 2
(
BC r B T = 6.332 092 264 x 10 5 , M = BC r B T
)
-1
= 1.579256 x 10 -6
æ 2.342 x 10 -4 ö m
÷
ç
ˆr = - C r B T Mw = ç - 6.681 x10 -4 ÷ m
÷
ç
ç 3.0669 x10 -7 ÷ rd
ø
è
æ 0.1044.10 -4 - 0.2978.10 -4
ç
C rˆ = C r B T BC r = ç
0.8495.10 - 4
ç
ç
sim.
è
1.367.10 -8 ö÷
- 3.899.10 -8 ÷
÷
1.789.10 -11 ÷
ø
rˆ ve C rˆ dolaylı modelde elde edilen çözümle özdeştir. Dolayısıyla lˆ , C lˆ ve σˆ 2o de
özdeş olacaktır.
Sonuç kontrol : g (lˆ) = o
lˆ22 - lˆ12 + 2lˆ1 x 2 coslˆ3 - x 22 = 4.9 x 10 -6
Şartlı model çözümleri lˆ ve C lˆ ‘den yararla P noktasının koordinatlarını (x,y) ve
kovaryans matrisinin hesaplanması.
xˆ = lˆ1coslˆ3 = 4276.71653
60
yˆ = lˆ1sinlˆ3 = 7161.62718
æ coslˆ3 0 - lˆ1sinlˆ3 ö æ 0.512709 0 - 7161.62718ö
÷=ç
÷
J =ç
ç sinlˆ 0 lˆ coslˆ ÷ ç 0.858562 0 4276.71653 ÷
ø
3
1
3 ø è
è
4
4
æ 4.903 x 10
5.389 x 10 ö÷
C xˆ = JC lˆ J T = ç
ç 5.389 x 10 -4 2.893 x 10 - 4 ÷ 2
è
øm
Böylece dolaylı modelle aynı sonuçlar elde edilmiş oldu.
(2) Bir eğri geçirme probleminde matematiksel model ve ölçüler aşağıdaki gibi verilmiş
olup, bilinmeyen parametrenin yaklaşık değeri xo=0.8 rad dır. Bileşik modelle ölçüleri
dengeleyiniz.
Ölçüler
2
1/2
l k = (1 - x sin l k + 2 )
(k = 1,2)
k
1
2
Bileşik model
l ko (rad)
0.895±0.002
0.774±0.002
l ko+ 2
30 o±1”
45 o±1”
- l k + (1 - x sin 2 l k + 2 )1/2 = 0 , (k = 1,2)
şeklinde yazılıp li = lio + ri ve x = x o + d dikkate alınarak, lio ve x o etrafında Taylor’a göre
seri açılımı şu şekildedir.
- sin 2 l k + 2
2
2 1 - xsin l k + 2
d - rk -
æ
- sin 2 l3
ç
ç 2 1 - x o sin 2 l o
3
A=ç
ç
- sin 2 l 4
ç
ç 2 1 - x o sin 2 l o
4
è
æ
ç-1 0
ç
B=ç
ç 0 -1
ç
è
x sinl k + 2 cos l k + 2
2
1 - xsin l k + 2
ö
÷
÷ æ - 0.139754 ö
÷
÷=ç
÷ çè - 0.322749 ÷ø
rad
÷
÷
ø
- xsinl3 cosl3
1- x
rk + 2 + (-l k + (1 - x sin 2 l k + 2 ) = 0 , (k = 1,2)
o
sin 2 l3o
0
æ - l o + 1 - x o sin 2 l o
3
w = çç 1
ç - l o + 1 - x o sin 2 l o
4
è 2
ö
÷
÷ æ - 1 0 - 0.387298
0
ö
÷
÷ = çç
- xsinl 4 cosl 4 ÷
0
- 0.516398÷ø rad
è 0 -1
1 - x o sin 2 l 4o ÷ø
0
ö æ - 5.72809 x 10 - 4 ö
÷=ç
÷
÷÷ çè - 5.966691 x 10 -4 ÷ø
ø
rad
61
æ 4.10 -6
ç
ç
Cr = ç
ç
ç
ç 0
è
ö
÷
÷
÷
÷
÷
2.35044.10 -11 ÷ø rd 2
0
4.10 - 6
2.35044.10 -11
0
æ 2.499998
ö
÷ x10 -6
M = (BC r B T ) -1 = ç
ç
0
2.499996 ÷ø
è
N = A T MA = 3.092443406 x 10 4 ,
C xˆ = C δˆ = N -1 = 3.2336889 x 10 -5
δˆ = - N -1 A T M w = 9.09648 x 10 -4 ,
xˆ = x o + δˆ = 0.8009096
æ - 0.69993 x 10 -3 ö
ç
÷
ç 0.30308 x 10 -3 ÷
÷ ;
rˆ = - C r B T M ( A δˆ + w ) = ç
ç - 1.5929 x 10 -6 ÷
÷
ç
ç 0.9197 x 10 -6 ÷
è
ø rad
sˆ 2o =
rˆ T C r-1rˆ 0.145
=
= 0.145
k-u
1
Sonuç kontrol:
f(xˆ, lˆ ) ~
=o
- lˆ1 + (1 - xˆ sin 2 lˆ3 )1/2 = 1.271 x 10 -4 @ 0)
- lˆ2 + (1 - xˆ sin 2 lˆ4 )1/2 = 2.936 x 10 -4 @ 0)
62
æ 0.894300ö
ç
÷
ç 0.774303÷
÷
lˆ = l o + rˆ = ç
ç 0.523599÷
çç
÷÷
è 0.785398ø rad
KAYNAKLAR
Aksoy, A. (1980): Dengeleme Hesabı Ders Notları, Harita Yüksek Teknik Okulu
(Basılmamış).
Koch, K.R. (1987): Parameter Estimation and Hypothesis Testing in Linear Models.
Springer-Verlag, Berlin.
Krakiwsky, E.J. (1982): A Synthesis of Recent Advances in the Method of Least Squares,
Div. Of Surv. Eng., The University of Calgary, Calgary, Canada.
Mikhail,E., Ackermann, F. (1976): Observation and Least Squares. Harper&Row
Publishers, Newyork.
Naser El-Sheimy, N. (2001): Adjustment of Observations., Lecture Notes. Department of
Geomatics Engineering. Calgary University (Basılmamış).
Öztürk,E., Şerbetçi, M. (1989): Dengeleme Hesabı I.,II.,III. Karadeniz Teknik
Üniversitesi, Mühendislik ve Mimarlık Fakültesi,Trabzon.
Vanicek, P., Krakwisky, E. J. (1982): Geodesy: The Concept. North-Holland Publishing
Company, Newyork.
63
© Copyright 2026 Paperzz