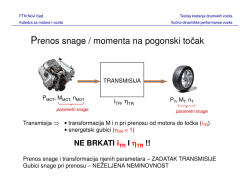
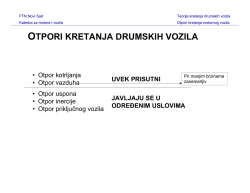
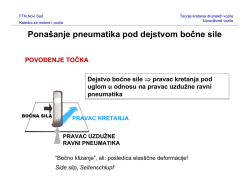
FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije Otpori transmisije – “unutrašnji” otpori kretanja Šeme transmisije POGON NAPRED M m+GP POGON NAZAD 4X4 M M m m GP R KP GP Transmisija = sistem mehaničkih prenosnika KP GP M – motor, m – menjač, GP – glavni prenosnik, KP – kardanski prenosnik, R – razvodnik snage FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije Gubici snage u transmisiji: opšti oblik bilansa snage mehaničkih prenosnika PUL = PIZL,UK!!! PIZL,UK = PIZL,KOR + PIZL,GUB OZNAČAVANJE: PIZL,KOR → PIZL PIZL < PUL PIZL = η⋅ PUL, η < 1 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije η= PIZL PUL PUL PIZL η PIZL = PUL – PGUB PRENOSNIK kulonovog trenja, viskozni PGUB Otpori otpori Primer: η = 0.95 PIZL = 95 kW PUL = 100 kW PGUB = 5 kW Zupčanici, ležajevi, zaptivni pstenovi... Stepen korisnosti sistema sačinjenog od više komponenata: PUL η1 η2 ... Ukupni stepen korisnosti transmisije ηTR = η1 · η2 · η3 ... · ηn ηn PIZL FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije IZVOR: WWW.RRI.SE PUL PIZL MUL MIZL PIZL = PUL – PGUB /n (P = M⋅n / 9554) MIZL = MUL – MGUB FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije UTICAJNI FAKTORI: η= •Opterećenje PIZL PUL •Brzina / broj obrtaja •Temperatura •Prenosni odnos •Konstruktivne karakteristike •Karakteristike materijala •Karakteristike maziva •Itd. PRIMER (ZA III STEPEN PRENOSA, PUTNIČKO VOZILO) POJEDNOSTAVLJENJE PRI ANALIZI VUČNO-BRZINSKIH PERFORMANSI (VUČNI PRORAČUN): η = CONST FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije PRIMERI IZVOR: WWW.RRI.SE AUDI A4 2.0 MULTITRONIC AUDI A4 3.0 QUATTRO BMW 320 D BMW 530i Automatic BMW X5 Automatic CITROEN BERLINGO 1,8 FIAT GRANDE PUNTO 1,4 HONDA ACCORD (’06.) NISSAN PRIMERA 2.0 CVT PEUGEOT 307 RENAULT MEGANE SPORT (’05.) GOLF V 1,6 0,87 0,87 0,90 0,83 0,83 0,93 0,88 0,93 0,77 0,90 0,95 0,91 Gubici transmisije rastu, odnosno ηTR opada, kada: • je transmisija kompleksnija (sadrži veći broj komponenata – npr. vozila 4x4) • se koriste pojedinačne komponente nižeg stepena korisnosti (frikcioni i hidrodinamički prenosnici, pužni parovi itd.) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije Stepeni korisnosti pojedinih komponenata transmisije · menjač ηm = 0,94 – 0,98 · kardanski prenosnik: ηKP = 0,98 – 1 · glavni prenosnik: ηGP = 0,94 – 0,98 · razvodnik snage: ηR = 0,96 – 0,98 Ukupni stepen korisnosti transmisije: ηTR = η1 η2 ... ηn FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stepen korisnosti transmisije M m+GP M m M m GP R POGON NAPRED POGON NAZAD KP KP 4X4 GP 1. ηTR = ηm ηGP ~ 0,93 GP 2. ηTR = ηm ηGP ηKP 3. ηTR = ηm ηGP2 ηR ηKP ~ 0,9 ~ 0,87 FTN Novi Sad Katedra za motore i vozila Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila Vrste pogonskih sistema Motor SUS + menjački prenosnik Elektromotor (eventualno sa menjačkim prenosnikom) Hibridni pogon: Motor SUS + elektromotor ili KERS (hidraulika, zamajac...) Itd. Neke od značajnih karakteristika: • Snaga i obrtni moment: maksimalne vrednosti i brzinska karakteristika • Potreba za transmisijom • Dimenzije, masa • Energetska efikasnost (∼potrošnja goriva) i emisija • Način skladištenja pogonske energije i vreme punjenja • Karakteristike i raspoloživost pogonskog goriva, način dobijanja i skladištenja • Gustina energije i snage Predlog • Autonomija vožnje • Pouzdanost, vek trajanja, pogodnost za održavanje teme za • Udobnost, buka, vibracije BSc • Itd. FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Brzinska karakteristika motora Zavisnost izlaznih parametara (P, M, gh...) od broja obrtaja motora n. P = M⋅ω (W, Nm, rad/s) 2π rad = 360° ω= π ⋅n 30 M P P = M⋅n / 9554 (kW) Kada je: broj obrtaja motora n=n1 ⇒ tada je: obrtni moment koji motor može da proizvede: M=M1 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Brzinska karakteristika motora Kako razlikovati krivu snage od krive momenta? P = M⋅ω Moment mora imati maksimum na manjem broju obrtaja nego snaga! M P Pošto je P = M⋅ω moment ne može da raste nakon što je snaga dostigla svoj maksimum! FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Radni režim motora – M ili P, n Motor nema jednu vrednost za brzinu i snagu, nego se one menjaju u nekom intervalu! Šta određuje snagu tj. moment i broj obrtaja motora? M NESTACIONARNO STANJE – menja se u vremenu! RADNA TAČKA MOTORA R=R(ω) – BRZINSKA KARAKTERISTIKA. OTPORA STACIONARNA RADNA TAČKA M=M(ω) – BRZINSKA KAR. MOTORA RADNA TAČKA OTPORA ω (=π⋅n/30) FTN Novi Sad Katedra za motore i vozila Brzinska karakteristika motora Kako se snima brzinska karakteristika? 1. Način određivanja radne tačke motora Mora se znati karakteristika potrošača! Ne može se razmatrati odvojeno! 2. Način snimanja brzinske karakteristike KONSTANTAN POLOŽAJ! Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Brzinska karakteristika motora Spoljna karakteristika i parcijalne karakteristike M (Nm) MAX (100%) 80% 50% 30% n (o/min) v (km/h) REGULACIJA BRZINE KRETANJA FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Brzinska karakteristika motora Maksimalni broj obrtaja – delimično opterećenje M (Nm) Spoljna karakteristika Linija koja spaja niz parcijalnih karakteristika pri maksimalnom broju obrtaja nMAX n (o/min) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stabilnost radnog režima Jo⋅ NESTABILNO M STABILNO dω =ΣMi dt ΣMi > 0 ⇒ R2=f2(n) dω >0 dt MOTOR UBRZAVA R1=f1(n) ΣMi = 0 ⇒ dω =0 dt STACIONARNO STANJE ΣMi < 0 ⇒ Kriva M=M(n) n dω <0 dt MOTOR USPORAVA FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Stabilnost radnog režima NESTABILNO M ΔM < 0 ⇒STABILAN REŽIM Δn STABILNO Koeficijent stabilnosti: R2=f2(n) ΔM Δn R1=f1(n) “Strmija” kriva ⇒ VEĆA STABILNOST Kriva M=M(n) n Misli se na stabilnost broja obrtaja → tj. u kojoj meri se menja broj obrtaja pri promeni spoljnog opterećenja! FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Idealna pogonska karakteristika - hiperbola HIPERBOLA: M = P M ω STABILNO R3=f3(n) R2=f2(n) R1=f1(n) ω P=const FTN Novi Sad Katedra za motore i vozila Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila Brzinske karakteristike elektromotora Jednosmerni motor INFORMATIVNO Izvor: J. Larminie BLDC motori → slična karakteristika (DC napajanje, elektronska regulacija promenljive frekvencije, AC princip) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Brzinske karakteristike elektromotora INFORMATIVNO Indukcioni motor Zahteva AC napajanje (baterija → invertor) Izvor: J. Larminie FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove PODSETNIK: P = F⋅v = M⋅ω PIZL = η⋅PUL PARAMETRI SNAGE PRENOŠENJE SNAGE OD MOTORA SUS DO POGONSKOG TOČKA → TRANSFORMACIJA PARAMETARA, UZ GUBITKE Svrha: prilagođavanje parametara motora uslovima kretanja FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove ZA ZADATI REŽIM MOTORA (M,n) TREBA ODREDITI FO I v MOTOR: M TRANSMISIJA MT iTR, ηTR n PARAMETRI REŽIMA RADA MOTORA TOČAK: MT → FO nT → v nT PARAMETRI REŽIMA KRETANJA VOZILA Zavisnost (M,n) Zavisnost (FO,v) = Brzinska karakteristika motora = Vučno-brzinska karakteristika vozila FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove 1. Parametri snage pogonskog motora - ULAZ POGONSKI MOTOR P M, n P P M M n FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove 2. Transformacija parametara snage u menjaču MENJAČKI PRENOSNIK M Mm Pm = P⋅ηm Mm = im⋅M⋅ηm n nm = im i= n1 n2 → PRENOSNI ODNOS im = i1, i2, i3, i4, ... – ZA SVAKI STEPEN PRENOSA → ODGOVARAJUĆI PRENOSNI ODNOS FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove 3. Transformacija parametara snage u glavnom prenosniku GLAVNI PRENOSNIK PGP = Pm⋅ηGP Mm MGP MGP = iGP⋅Mm⋅ηGP nGP = iTR = iGP⋅im → UKUPNI PRENOSNI ODNOS TRANSMISIJE (za posmatrani slučaj) nm iGP MGP = iGP⋅im⋅M⋅ηTR MGP = iTR⋅M⋅ηTR nGP = n iTR Veći broj stepeni transformacije parametara snage i izvora gubitaka postoji kod: •Kamiona, autobusa, traktora: dva ili tri menjačka prenosnika, bočni reduktor •Vozila sa pogonom na više osovina: razvodnik snage iTR = im1⋅im2⋅im3⋅iR⋅iBR⋅iGP •Vozila sa hidrodinamičkim menjačem FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove Podsetnik: opšta koncepcija transmisije iTR, ηTR Izvor: Fahrzeuggetriebe FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove 4. Transformacija momenta i broja obrtaja u vučnu silu i brzinu Bezbočnog bočnogred.: red.: Bez GP PPTT==PPGP GP MMTT==MMGP GP nnTT==nnGP TOČAK MT, nT rD PT = ηTR⋅ P = MT⋅nT = FO⋅v MT = iTR⋅ ηTR⋅ M nT = FO, v v = rD⋅ωT n iTR MT FO = rD PODSETNIK: Stvarna rezultanta je RX = FO – Ff! NAPOMENA: v = rD⋅ωT, dakle i MT⋅nT = FO⋅v, važi kada se zanemari klizanje pogonskog točka! FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove 4. Transformacija momenta i broja obrtaja u vučnu silu i brzinu MT, nT rD MT = iTR⋅M⋅ηTR MT FO = rD v → km/h ! nT = iTR v = rD⋅ωT ωT = FO, v M⋅ im ⋅ iGP ⋅ηTR FO = rD n π ⋅ nT 30 0,377 ⋅ rD ⋅ n v= im ⋅ iGP im⋅iGP = iTR – UKUPNI PRENOSNI ODNOS TRANSMISIJE FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove Testerasti dijagram – kinematička relacija između broja obrtaja motora i brzine kretanja vozila u pojedinim stepenima prenosa 0,377 ⋅ rD ⋅ n v = rD⋅ωT odnosno v = im ⋅ iGP ⇒ linearna relacija između nT i v FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Prenos snage na pogonske točkove Testerasti dijagram – kinematička relacija između broja obrtaja motora i brzine kretanja vozila u pojedinim stepenima prenosa Testerasti dijagram 250 v (km/h) 200 v= 150 0,377 ⋅ rD ⋅ n im ⋅ iGP 100 50 0 0 1000 2000 3000 4000 5000 n (o/mim) v = C⋅n Viši stepeni prenosa: im Þ ⇒ C Ü 6000 7000 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila “Preslikavanje” karakteristike sa motora na točak M(n) FO(v) im = const n M⋅ im ⋅ iGP ⋅ηTR FO = rD v 0,377 ⋅ rD ⋅ n v= im ⋅ iGP VUČNO-BRZINSKA KARAKTERISTIKA Jedina nezavisno promenljiva → n! (M = M(n) ⇒ FO = FO(n)!) n ⇒ M ⇓ v ⇓ FO FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila “Preslikavanje” karakteristike sa motora na točak FO VEĆE iTR iTR↑ ⇒ FO ↑, v ↓ M MANJE iTR n v FO = M⋅ im ⋅ iGP ⋅ ηTR rD v= 0,377 ⋅ rD ⋅ n im ⋅ iGP FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Širina radnog intervala motora SUS Izvor: Fahrzeuggetriebe Širina radnog intervala motora SUS: nMIN:nMAX ≅ 1:10 – Oto motor nMIN:nMAX ≅ 1:6 – Dizel motor Širina intervala brzina kretanja motornog vozila: vMIN:vMAX ≅ 1:30 FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila “Preslikavanje” karakteristike sa motora na točak Primer: i=3,42·1,38; rD=0,285m; n→v M→FO 160 140 2000 100 M⋅ im ⋅ iGP ⋅ η TR F0 = rD 80 60 40 Fo(N) 120 M(Nm) 2500 1500 INTERVAL BRZINE VOZILA 1000 ZA ODREĐEN PRENOSNI ODNOS 500 20 RADNI INTERVAL MOTORA 0 0 0 1000 2000 3000 4000 n(o/min) 5000 6000 7000 0 20 40 r ⋅ω v= D im ⋅ iGP 60 80 100 120 140 160 180 200 220 v (km /h) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Idealna i stvarna pogonska karakteristika ≠ Dakle: 1) Nedovoljna širina radnog intervala motora SUS 2) Nepovoljan oblik karakteristike (dve interpretacije istog problema – jedno proizilazi iz drugog) FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Karakteristika zajedničkog rada motora SUS i menjačkog prenosnika FO im ≠ const im = iI im = iII M im = iIII im = iIV n v FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Karakteristika zajedničkog rada motora SUS i menjačkog prenosnika FO(v) FO(v) ≈ v v FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Vučno-brzinska karakteristika Raspoloživa vučna sila na točku u funkciji brzine kretanja vozila im = iI FO im↑ ⇒ FO ↑, v im = iII M im = iIII ↓ i1 > i2 > i3 > ... im = iIV n v VUČNO-BRZINSKA KARAKTERISTIKA – VUČNI DIJAGRAM FO = M⋅ im ⋅ iGP ⋅ ηTR rD v= 0,377 ⋅ rD ⋅ n im ⋅ iGP FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Idealna hiperbola vuče FO(v) PT=FO⋅v (W, N, m/s) ⇓ Idealna hiperbola: hipotetička kriva obimne sile za slučaj mogućnosti iskorišćenja maksimalne raspoložive snage motora – Pmax u svim režimima kretanja P PT = (kW, N, km/h) ⇓ P = PMAX = const FO = v PTMAX Stvarna kriva P(v) FOid 3600 ⋅ PMAX ⋅ η TR = v FO ⋅ v 3600 3600 ⋅ PT v v PT = PTMAX FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Idealna hiperbola vuče Vučno-brzinska karakteristika 10000 9000 Primer 8000 7000 F (N) 6000 5000 4000 3000 2000 1000 0 0 20 40 60 80 100 120 140 160 180 200 v (km/h) Važna osobina: idealna hiperbola tangira stvarne krive vuče u tačkama koje odgovaraju broju obrtaja PMAX – tu je ispunjen uslov prema kom je idealna hiperbola definisana! FTN Novi Sad Teorija kretanja drumskih vozila Katedra za motore i vozila Vučno-dinamičke performanse vozila Vučno-brzinska karakteristika FO(N) FO = (M(n)⋅im⋅iGP ⋅ηtr) / rD FOid im=iI v = (0,377⋅rD⋅n) / im⋅iGP 100 300 Idealna hiperbola 90 250 FOI 80 70 200 60 50 150 40 100 30 20 50 10 0 0 FOII 1000 2000 3000 4000 5000 6000 0 7000 im=iII im=iIII FOIII FOIV FOV im=iIV im=iV FOTP = Ff + FW v (km/h) VUČNI DIJAGRAM FTN Novi Sad Katedra za motore i vozila Vučno-brzinska karakteristika Vučno-dinamičke karakteristike vozila: • Maksimalna brzina • Mogućnost savlađivanja uspona • Ubrzanje, vreme i put zaleta Teorija kretanja drumskih vozila Vučno-dinamičke performanse vozila
© Copyright 2026 Paperzz