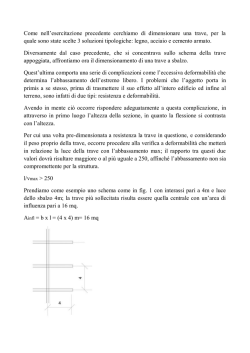
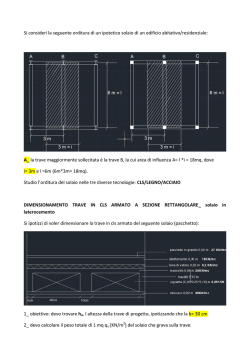
A4.4 La linea elastica Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. poliglotta Linea elastica GB: Elastic curve F: Ligne élastique D: Elastische Linie Progettando un elemento di una costruzione o di un organo meccanico, oltre a determinare le sollecitazioni e le tensioni, può essere utile co noscere anche le deformazioni prodotte dai carichi esterni; ciò diventa indispensabile nella determinazione delle reazioni vincolari delle travi iperstatiche, ossia delle travi con vincoli sovrabbondanti. Inoltre, l’in fluenza sulla deformazione dell’asse geometrico, detta linea elastica o deformata elastica delle travi inflesse, da parte delle forze di taglio, è trascurabile, per cui si considerano solo le azioni di deformazione dovute al momento flettente. Si consideri una trave inflessa, soggetta a un generico sistema di for ze esterne, e si assuma un sistema di assi cartesiani ortogonali tali che, l’asse delle ascisse coincida con l’asse della trave e l’asse delle ordinate rappresenti l’abbassamento y subito da una sezione generica in seguito alla deformazione (4Fig. 4.23). Fig. 4.23 Rappresentazione della linea elastica di una trave, sottoposta a un sistema generico di forze esterne. " L’abbassamento y si assume positivo verso il basso, affinché le ordinate y risultino positive nella maggior parte dei casi. In riferimento alla figura 4.23, la generica sezione S posta alla di stanza dx dall’origine degli assi, per effetto della deformazione, subisce una rotazione dϕ rispetto alla posizione originaria, che può essere es pressa come: dy = tg ϕ ds [4.83] Essendo piccolissimo l’angolo di rotazione, non è un errore sensibile so stituire tg ϕ con ϕ e ds (lunghezza del tronco dx in seguito alla deforma zione) con dx; per cui la [4.83] diventa: dy =ϕ dx [4.84] da cui, derivando rispetto a x, si ottiene: d 2 y dϕ = dx 2 dx ovvero: 1 Le travi inflesse e la linea elastica d2 y dx = dϕ dx 2 [4.85] A4 Com’è stato detto riguardo alla flessione semplice, una trave di lunghez za l, soggetta a un momento flettente costante su tutta la lunghezza, si deforma secondo un arco di cerchio, il cui raggio di curvatura R è: R= EI Mf Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. e la rotazione ϕ di una delle sezioni estreme della trave rispetto all’altra (angolo di flessione) risulta: ϕ= Mf l l = R EI Pertanto l’angolo dϕ, espresso nella [4.85], rappresenta la rotazione fra le due sezioni comprendenti il tronco dx e vale: dϕ = M f dx EI [4.86] Sostituendo nella [4.85] risulta: d2 y M f = EI dx 2 [4.87] che rappresenta l’equazione differenziale della linea elastica. poliglotta Equazione differenziale GB: Differential equation F: Equation differérentielle D: Differentialgleichung Osservazioni: il termine (dy/dx), espresso nella [4.84], rappresenta la derivata prima di y(x) e si indica comunemente con y'; invece il termine (d2y/dx2), espresso nella [4.87], indica la derivata seconda di y(x) e si rappresenta con y''; quindi le relazioni [4.84] e [4.87] si possono scrivere nel modo seguente: y' = ϕ e: y" = Mf E I Ipotizzando l’asse x positivo verso destra e l’asse y positivo verso il basso, l’equazione differenziale della linea elastica diventa: y" = − Mf EI [4.88] in cui la curvatura y'' e il momento flettente Mf hanno segno opposto. Infatti, se il momento è positivo, la linea elastica rivolge la concavità nel verso negativo dell’asse y, quindi la curvatura è negativa (4Fig. 4.24a); mentre se il momento è negativo, la linea elastica rivolge la concavità nel verso positivo dell’asse y, perciò la curvatura è positiva (4Fig.4.24b). L’integrazione della linea elastica può essere eseguita, caso per caso, se sono note le espressioni del momento flettente Mf, in funzione dell’ascissa x, e del momento quadratico I; integrando due volte si ottie ne l’ordinata y, che tuttavia non è completamente determinata. 2 Le travi inflesse e la linea elastica A4 Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Fig. 4.24 Andamento della linea elastica in funzione del momento flettente: a) curvatura negativa con momento flettente positivo; b) curvatura positiva con momento flettente negativo. poliglotta Freccia di inflessione GB: Deflection F: Flèche par pliage D: Durchbiegung Infatti, poiché in ogni operazione di integrazione compare una costante, per determinare completamente l’ordinata y occorre calcolare il valore di due costanti C1 e C2, che si ottiene tenendo conto delle condizioni di vincolo della trave. Eseguendo una prima integrazione della [4.87] si ricava l’espressione dell’angolo di rotazione ϕ = y' di ciascuna sezione, ossia dell’inclinazione della tangente in ogni punto della linea elastica; una seconda integrazio ne consente di determinare l’espressione dell’ordinata y, ossia l’abbas samento della sezione, detto freccia di inflessione o, semplicemente, freccia. Ricavato il valore delle costanti, si calcola la freccia y, funzione della variabile x, assegnando alla x i valori corrispondenti alle sezioni di cui si vuole determinare l’abbassamento. Esempio 1 Determinare la freccia e la rotazione dell’estremo libero di una tra ve a mensola, di sezione costante, soggetta a un carico F concentrato nell’estremo libero (4Fig. 4.25). Fig. 4.25 Rappresentazione della linea elastica di una trave a mensola, di lunghezza l, sottoposta a un carico concentrato nell’estremo libero. Soluzione L’espressione del momento flettente è: Mx = − F x Per la [4.88] l’espressione della linea elastica diventa: E I y" = F x [4.89] [4.90] integrando tale equazione una prima volta si ha: 3 Le travi inflesse e la linea elastica E I y' = F x2 + C1 2 [4.91] A4 integrando la seconda volta si ottiene: EI y= F x3 + C1 x + C2 6 [4.92] Considerando l’origine degli assi x e y all’estremo libero della mensola e tenendo conto delle condizioni di vincolo della trave, nella sezione d’inca stro (x = l) devono essere nulle sia la freccia sia la rotazione, ossia: y=0 Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. e: y' = 0 Quindi risulta: F l2 C1 = − 2 e: F l3 = + C 2 3 Sostituendo i valori delle due costanti nelle relazioni [4.91] e [4.92] si ottiene: E I y' = F x 2 F l2 − 2 2 e: EI y= F x3 F l2 F l3 − x+ 6 2 3 Pertanto i valori massimi della rotazione ϕ e della freccia f che si hanno nella sezione all’estremo libero (x = 0), sono: ϕ = y' = − F l2 2EI e: F l3 f = y= 3EI [4.94] L’angolo ϕ risulta negativo perché la rotazione è sinistrogira. Nel caso delle travi appoggiate, si può eseguire il calcolo della freccia e della rotazione considerando la trave costituita da due mensole e adottan do, quindi, le espressioni delle frecce e delle rotazioni concernenti queste ultime. Esempio 2 Determinare la freccia massima e la rotazione degli appoggi di una trave appoggiata, soggetta a un carico F concentrato in mezzeria (4Fig. 4.26 ). 4 Le travi inflesse e la linea elastica A4 Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Fig. 4.26 a) Rappresentazione della linea elastica di una trave appoggiata, di lunghezza l, sottoposta a un carico concentrato in mezzeria. b) Trave a mensola di lunghezza l/2, soggetta a un carico concentrato F/2 all’estremità libera, che costituisce la metà della trave appoggiata. Soluzione La tangente alla deformata nel suo punto di mezzo è orizzontale, per cui ogni metà della trave si comporta come una mensola di lunghezza l/2, soggetta a un carico, concentrato nel suo estremo libero, di intensità F/2 (4Fig. 4.26b). A tale mensola è possibile applicare la [4.94], per cui si ha: 3 F l F l3 2 2 f = = 3EI 48 E I Per quanto riguarda l’angolo di rotazione dell’estremità, applicando la [4.93] risulta: 2 F l F l2 2 2 ϕ= = 2EI 16 E I Nella tabella 4.1 sono indicati i valori delle rotazioni ϕ e delle frecce f rela tivi ad alcune travi a mensola e appoggiate, con diverse condizioni di carico. Tabella 4.1 Valori delle frecce e delle rotazioni per alcune travi soggette a vari sistemi di carico (continua) Schema della trave Freccia f f = f = 5 Le travi inflesse e la linea elastica Fl 3 ϕ= 3EI Mf l Rotazione ϕ 2 2EI ϕ= Fl 2 2EI Mf l EI A4 Tabella 4.1 Valori delle frecce e delle rotazioni per alcune travi soggette a vari sistemi di carico (segue) Schema della trave f = Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Rotazione ϕ Freccia f f = f = f = ql 4 ϕ= 8EI Fl 3 ϕ= 48 E I Mf l 2 ϕ= 8EI 5 ql 4 384 E I ϕ= ql 3 6EI Fl 2 16 E I Mf l 2EI ql 3 24 E I A4.5Cenni sulle travi iperstatiche I problemi riguardanti le travi con vincoli sovrabbondanti, o travi iperstatiche, si dicono staticamente indeterminati e non possono essere risolti con le sole equazioni cardinali della Statica (equazioni di equili brio relative alla traslazione e alla rotazione). Ogni vincolo presenta da una a tre reazioni e il numero di equazioni di equilibrio corrisponde al numero delle reazioni vincolari. Pertanto, per risolvere i problemi iper statici, occorre aggiungere al sistema formato dalle equazioni cardinali della Statica – sufficienti per i sistemi staticamente determinati (siste mi isostatici) – le equazioni supplementari con cui completare il numero di equazioni costituenti il sistema. Le equazioni supplementari si basano sul principio che i vincoli sovrabbondanti, non necessari per l’equilibrio, limitano la deformazione del corpo. Il procedimento da seguire per risolvere questo tipo di problemi è il seguente: — si eliminano i vincoli sovrabbondanti, sostituendoli con le reazioni in cognite; in questo modo si rende la trave isostatica e si determinano 6 Le travi inflesse e la linea elastica A4 le deformazioni generate dai carichi esterni, nei punti dove sono posti tali vincoli; — si determinano le deformazioni nei punti dei vincoli eliminati, consi derando la trave soggetta alla sola azione delle reazioni eliminate; — si impone che le deformazioni, generate separatamente dai carichi esterni e dai vincoli eliminati, siano uguali. Esempio Determinare le reazioni vincolari e tracciare i diagrammi delle sollecita zioni di taglio e flessione della trave iperstatica (4Fig. 4.27), soggetta a un carico distribuito uniformemente. " Fig. 4.27 a) Trave incastrata a un estremo e appoggiata all’altro, sottoposta a un carico uniformemente distribuito su tutta la sua lunghezza. b) Trave a mensola, soggetta al carico distribuito. c) Trave a mensola, soggetta solo all’azione della reazione RVB del vincolo. d) Diagramma del taglio. e) Diagramma del momento flettente. " Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Si ottengono così tante equazioni quante sono le incognite sovrabbon danti che, associate alle equazioni cardinali della Statica, consentono di risolvere il problema. Soluzione Il carico complessivo agente sulla trave è: Q = ql Le equazioni di equilibrio sono: ROA = 0 RVA + RVB − Q = 0 7 Le travi inflesse e la linea elastica l − M A + Q − RVB l = 0 2 [4.95] A4 Eliminando per esempio l’appoggio B, la trave diventa isostatica, ossia una trave a mensola con carico distribuito (4Fig. 4.27b) e il valore della freccia all’estremo B è dato da: f '= 1 Q l3 8 EI [4.96] Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Tale relazione indica la freccia all’estremo libero di una trave a mensola, sottoposta a un carico uniformemente distribuito (4Tab. 4.1). Considerando la trave a mensola soggetta solo all’azione della rea zione RVB del vincolo eliminato (4Fig. 4.27c), la freccia generata ha il valore (4Tab. 4.1): f "= 3 1 RVB l 3 EI [4.97] Poiché l’estremità della trave originaria non presenta alcuno sposta mento, le due frecce si devono compensare, ossia devono avere lo stesso valore assoluto, f' = f'': 3 1 Q l3 1 RVB l = 8 EI 3 EI [4.98] l’equazione supplementare appena descritta è associata alle equazioni di equilibrio del sistema, espresse dalla [4.95], per ricavare tutte le rea zioni vincolari. Dalla [4.98] si ottiene il valore: 3 RB = Q 8 [4.99] sostituendo nel sistema [4.95], dalla seconda equazione si ricava: RVA = Q − 3 5 Q= Q 8 8 [4.100] dalla terza equazione si ricava: MA = Ql 3 1 − Ql = Ql 8 2 8 [4.101] Determinate le reazioni vincolari, è possibile disegnare i diagrammi di sollecitazione del taglio e del momento flettente. Il taglio in una sezione generica pertanto vale: T=− 3 ql − q x 8 [4.102] e varia linearmente come rappresentato nella figura 4.27d. 8 Le travi inflesse e la linea elastica A4 Il momento flettente generico vale: M= 3 q x2 ql x − 8 2 [4.103] ed è rappresentato da un diagramma parabolico (4Fig. 4.27e). Il momento flettente massimo si ha dove il taglio è nullo, ossia per x = (3/8) l e vale: Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. 9 Le travi inflesse e la linea elastica Mmax = 9 Ql 128 [4.104] A4 L’Unità didattica in breveA4 Generalità Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Quando i vincoli di una struttura sono strettamente sufficienti al suo equilibrio, essa è detta isostatica; al contrario, quando i vincoli sono sovrabbondanti, la struttura è detta iperstatica. L’effetto che le azioni esterne esercitano localmente in una sezione generica di una trave, ad asse rettilineo orizzontale e a sezione costan te, è analizzato considerando la trave caricata da un sistema di forze, situato nel piano di sollecitazione, contenente il suo asse; la trave, in questo caso, è detta piana. Una trave, sottoposta a un sistema di forze perpendicolari al proprio asse geometrico, che generano sollecitazioni di taglio e flessione, è detta trave inflessa. Per calcolare le sollecitazioni di taglio e di flessione nelle travi in flesse, occorre inizialmente determinare le reazioni vincolari, i cui valori sono calcolati mediante le equazioni cardinali della Statica. Poiché si considerano le travi piane ad asse orizzontale, sottoposte a carichi perpendicolari al proprio asse, i vincoli sviluppano solo reazio ni verticali, per cui la condizione di isostaticità della trave può essere realizzata mediante due appoggi semplici, non essendovi differenza, in questo caso, fra la cerniera e il carrello; così facendo le reazioni vinco lari da determinare si riducono a due. Pertanto, per la determinazio ne delle reazioni vincolari, sono sufficienti due sole equazioni cardinali della Statica: quella di equilibrio relativa alla traslazione verticale e quella di equilibrio relativa alla rotazione intorno a qualunque punto del piano della trave. Determinate le reazioni vincolari, si procede al calcolo delle solle citazioni di taglio e di flessione in una generica sezione S della trave, prendendo in esame le forze a sinistra o a destra della suddetta sezione. Supponendo, per esempio, di esaminare le forze a sinistra della sezione S, si osserva che la forza di taglio T è data dalla somma algebrica di tutte le forze (compresa la reazione vincolare) poste a sinistra della sezione considerata. Se nella sezione in esame è applicata una forza, essa non dev’essere compresa nella sommatoria. Il momento flettente si ricava dalla somma algebrica dei momenti di tutte le forze poste a sinistra del la sezione S, compresa la reazione vincolare. Al fine di ottenere valore e segno coincidenti, dev’essere stabilita una convenzione per quanto riguarda il segno da attribuire al taglio e al mo mento flettente. Per le forze di sinistra si considerano positivi il taglio, se rivolto verso l’alto, e il momento flettente, se ha verso orario. Per le forze di destra si considerano positivi il taglio, se rivolto verso il basso, e il momento flet tente, se ha verso antiorario. Il taglio T e il momento flettente M variano generalmente da sezione a sezione; inoltre il taglio, il momento flettente e il carico sono legati fra loro: nei tratti in cui la trave è scarica, il taglio è costante, mentre il momento flettente è massimo nelle sezioni dove il taglio è nullo. Le variazioni delle sollecitazioni di taglio e di flessione in tutte le sezioni di una trave possono essere rappresentate mediante dia grammi. L’esame di tali diagrammi consente di individuare direttamente 10 Le travi inflesse e la linea elastica A4 Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. le sezioni più pericolose, ossia le sezioni dove si hanno i valori massimi delle sollecitazioni esterne, potendo così procedere ai calcoli di progetto o di verifica della resistenza della trave. Si disegna al di sotto della trave una linea orizzontale, detta linea fondamentale, avente la stessa lunghezza della trave, e si individua no alcune sezioni caratteristiche, che di solito sono quelle in corrispon denza dei carichi e degli appoggi. Si calcolano i valori della forza di taglio, immediatamente prima o dopo le sezioni stesse, e si riportano sulla linea fondamentale, secondo una scala opportuna (per esempio la stessa di quella adottata per le forze), i segmenti verticali, proporzionali ai valori trovati del taglio; collegando gli estremi di tali segmenti con tratti rettilinei orizzontali si ottiene il diagramma del taglio. Il dise gno del diagramma è eseguito, convenzionalmente, riportando sopra o sotto la linea fondamentale le forze di taglio di valore, rispettivamente, positivo o negativo. Il procedimento per determinare il diagramma del momento flettente è analogo a quello del taglio. Assumendo le stesse sezioni caratteristiche, si ricavano i valori dei momenti e si rappresentano sulla linea fonda mentale, in corrispondenza delle sezioni considerate, mediante segmenti verticali a essi proporzionali secondo la scala prescelta. Unendo con tratti rettilinei i loro estremi si ottiene il diagramma del momento flettente, in cui sopra o sotto la linea fondamentale si riportano, rispettivamen te, i valori positivi o quelli negativi. La linea elastica Progettando un elemento di una costruzione o di un organo meccanico, ol tre a determinare le sollecitazioni e le tensioni, può essere utile conoscere anche le deformazioni prodotte dai carichi esterni; ciò diventa indispensa bile nella determinazione delle reazioni vincolari delle travi iperstatiche. L’influenza sulla deformazione dell’asse geometrico, detta linea elastica o deformata elastica delle travi inflesse, da parte delle forze di taglio, è trascurabile, per cui si considerano solo le azioni di deformazio ne dovute al momento flettente. L’integrazione dell’equazione differenziale della linea elastica consente di determinare i parametri della deformazione, ossia, la freccia di inflessione e gli angoli di rotazione di ciascuna sezione. I problemi riguardanti travi iperstatiche sono detti staticamente indeterminati e non possono essere risolti con le sole equazioni cardi nali della Statica. Ogni vincolo presenta da una a tre reazioni e il nu mero di equazioni di equilibrio corrisponde al numero delle reazioni vin colari. Pertanto, per risolvere i problemi iperstatici, occorre aggiungere al sistema formato dalle equazioni cardinali della Statica (sufficienti per i sistemi isostatici), le equazioni supplementari, con cui completare il numero di equazioni costituenti il sistema. Le equazioni supplementari si basano sul principio che i vincoli sovrabbondanti, non necessari per l’equilibrio, limitano la deformazione del corpo. Il procedimento da seguire per risolvere questo tipo di problemi è il seguente: 11 Le travi inflesse e la linea elastica A4 — si eliminano i vincoli sovrabbondanti, sostituendoli con le reazioni incognite, e si rende la trave isostatica, determinando le deforma zioni generate dai carichi esterni nei punti dove sono posti tali vincoli; — si determinano le deformazioni nei punti dei vincoli eliminati, con siderando la trave soggetta alla sola azione delle reazioni eliminate; — si impone che le deformazioni generate separatamente dai carichi esterni e dai vincoli eliminati siano uguali. Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Si ottengono così tante equazioni quante sono le incognite sovrabbon danti che, associate alle equazioni cardinali della Statica, consentono di risolvere il problema. 12 Le travi inflesse e la linea elastica A4 UD15 Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. PROBLEMI DI RIEPILOGOA4 1.Eseguire il dimensionamento della trave a mensola (4Fig. 4.28), realiz zata con un profilato IPE in acciaio S 235, sapendo che la forza applicata all’estremo libero ha intensità F = 2000 N e la lunghezza della trave è l = 3 m. Fig. 4.28 Trave a mensola soggetta a un carico F concentrato all’estremo libero. 2.Dimensionare la trave a mensola di lunghezza l = 4,5 m, soggetta a più carichi concentrati (4Fig. 4.29), impiegando un profilato HE in acciaio S 235 e considerando i seguenti dati: F1 = 500 N, F2 = 900 N, F3 = 600 N, x1 = 1,5 m e x2 = 3 m. Eseguire, inoltre, una verifica a taglio. Fig. 4.29 Trave a mensola soggetta a più carichi concentrati. 3.Eseguire il dimensionamento della trave su due appoggi di estremità, a sezione circolare piena e di lunghezza l = 6 m, sottoposta a un sistema di forze concentrate (4Fig. 4.30), sapendo che il materiale utilizzato è l’acciaio S 235 e che F1 = 8000 N, F2 = 4000 N, F3 = 6000 N, x1 = 2,5 m, x2 = 3 m e x3 = 4,5 m. Eseguire, inoltre, una verifica a taglio. Fig. 4.30 Trave appoggiata alle estremità, soggetta a più carichi concentrati. 13 4.Una trave con due appoggi di estremità, realizzata con un profilato HE in acciaio S 275, è sottoposta a un carico uniformemente distribuito (4Fig. 4.31). Eseguire il dimensionamento della trave, sapendo che ha Le travi inflesse e la linea elastica A4 una lunghezza l = 7 m e che l’intensità per unità di lunghezza del carico è q = 550 daN/m. Meccanica, Macchine ed Energia – articolazione Energia 2 – Giuseppe Anzalone, Paolo Bassignana, Giuseppe Brafa Musicoro • Copyright © Ulrico Hoepli Editore S.p.A. Fig. 4.31 Trave appoggiata alle estremità, soggetta a un carico uniformemente distribuito. 5.Una trave con due appoggi di estremità (4Fig. 4.32) è soggetta a un ca rico uniformemente distribuito su una parte della sua lunghezza. Dimensionare la trave considerando i seguenti dati: carico distribuito q = 6000 N/m; lunghezza della trave l = 6 m; lunghezza del tratto di trave interessato dal carico distribuito a = 2,5 m; sezione quadrata; σams = 160 N/mm2. Fig. 4.32 Trave appoggiata alle estremità, soggetta a un carico uniformemente distribuito su una parte della sua lunghezza. 6.Si consideri una trave con due appoggi intermedi, sottoposta a un siste ma di forze concentrate (4Fig. 4.33). Si vuole eseguire il dimensiona mento della trave realizzata con un profilato IPE in acciaio S 275, ipo tizzando i seguenti dati: lunghezza totale della trave lt = 9 m; distanza fra gli appoggi l = 5 m; lunghezza degli sbalzi x1 = x4 = 2 m; x2 = 2,5 m; x3 = 3,5 m; F1 = 800 N; F2 = 1600 N; F3 = 1800 N; F4 = 1000 N. Fig. 4.33 Trave con appoggi intermedi, soggetta a carichi concentrati. 14 Le travi inflesse e la linea elastica A4
© Copyright 2026 Paperzz