Prerequisiti
CORSO DI FISICA 2006
Testo consigliato
z
z
R. A. Serway, J.W. Jewett
Principi di Fisica
III edizione
EdiSES
z
z
N.B. È possibile utilizzare testi
già in possesso, qualora siano testi
universitari adatti al contenuto
del corso
z
z
Cos’è la
calcolo differenziale
derivata e sue proprietà
differenziale di una funzione
df=(df/dx) dx
calcolo integrale
sviluppo in serie
equazioni differenziali
calcolo vettoriale
Vedere appendice B:
Vedere appendice B:
richiami
richiamididimatematica
matematica
Cos’è la
La parola fisica deriva dalla parola greca
physis = natura
• La fisica era intesa come filosofia naturale
• recentemente si intendono come fenomeni
fisici quei processi nei quali non cambia la
natura delle sostanze che vi partecipano
*R.
*R.Feymann
Feymann, ,lalalegge
leggefisica
fisica
La fisica è la scienza che ha per obiettivo lo
descrizione e comprensione
dei fenomeni naturali che accadono nell’universo
LINGUAGGIO
La descrizione può essere:
– qualitativa
– quantitativa
Cos’è la
Cos’è la
La fisica è la scienza che ha per obiettivo lo studio dei
costituenti la materia e delle loro interazioni
Tutta la materia, vivente e non, deriva dalla aggregazione di
costituenti elementari elettroni, protoni e neutroni(e altri
instabili) i quali si aggregano per formare gli atomi, che a loro
volta si aggregano per formare le molecole, le quali si aggregano a
formare i corpi, che ci appaiono sotto forma di solidi, liquidi o
gas:
perchè?
la risposta a questi quesiti risiede nel concetto di
interazione
Perché studiare la Fisica?
z
z
z
z
z
Sviluppo scientifico
Metodo fisico
scientifico
Connessioni con altre discipline
matematica
tecnologia
sviluppo strumentazione
informatica
Competenze di programmazione
Simulazione
La fisica è la scienza che descrive i fenomeni
naturali mediante
relazioni e leggi
struttura,ritmo che lega tra loro i fenomeni naturali *
Newton-Maxwell
molteplicità di argomenti caratterizzanti la
fisica, a partire dalla caratterizzazione
percettiva, fino alla storica:
classica, atomica, molecolare, nucleare,
astrofisica, biofisica
metodo fisico: dall’osservazione al
modello
Osservazione
accurato e critico esame
di un fenomeno
Sperimentazione osservazione di questo
fenomeno in condizioni
controllate
Verifica teorica
modello
Sulla base delle conoscenze
acquisite, e tramite l’uso di un
lo scienziato può predire fenomeni
non ancora noti o verificare relazioni
tra fenomeni noti, grazie all’uso dell
metodo fisico: sperimentale
grandezze significative
Operazione di misura
Individuazione di tutte quelle
necessarie a descrivere il fenomeno
determinazione quantitativa della
grandezza numero
definizione operativa grandezza
relazioni, leggi, teorie
quantitative che collegano
le grandezze
Verifica
Formulazione quantitativa
linguaggio matematico
z
z
caratteristiche
z
z
z
Riproducibilità
Verificabilità
Capacità di
previsione
qualora sorgano discrepanze tra
teoria ed esperimento è
necessario:
1- verificare le condizioni
sperimentali
2- formulare nuove teorie
•descrizione di tutti i fenomeni con
le stesse caratteristiche
http://www.interactivephysics.com/simulations.html
•previsione
http://www.phy.syr.edu/courses/modsim.html
http://www.myphysicslab.com/
•simulazione
metodo fisico: storia
z
metodo fisico: sperimentale
Quando è iniziata le fisica? Con lo studio
sistematico e quantitativo di fenomeni : meccanica
e astronomia
Cosa ha determinato il loro sviluppo? Lo sviluppo
delle innovazioni tecnologiche del tempo:
invenzione del telescopio e la messa punto di
orologi precisi
Quando? Galileo (1564-1642) Newton (16421727)
metodo fisico: sperimentale
grandezze significative
Operazione di misura
Individuazione di tutte
quelle necessarie a
descrivere il fenomeno
definizione operativa
grandezza
determinazione quantitativa
della grandezza numero
misura di una grandezza fisica
z
procedimento chiaro e ripetibile che associa ad una
grandezza un numero
z
definizione operativa di una grandezza (svolgimento
sperimentale)
z
Valutazione relativa di grandezze della stessa specie
rapporto quantitativo con unità di misura
grandezza= numero * unità
*Un’unità di misura è una quantità fisica particolare, definita ed
adottata per convenzione, con cui altre quantità dello stesso
tipo sono paragonate
Da
Daintegrare
integrare1.1
1.1ee
1.2
1.2
misura di una grandezza fisica
dirette
indirette
Strumenti (prontezza, sensibilità, precisione)
Errori di misura (casuali e sistematici)
Unità di misura
z
z
L’operazione di misura (lo strumento) può
perturbare il fenomeno da misurare
Cifre significative
Sono legate alla misura e alla
sua indeterminazione
Regole per operazioni
prodotto minimo numero cs
somma ultima cs comune
0,01
0,1
1
1,0
10
1
1
1
2
2
z
Cifre
Cifresignificative
significative Da
Da
integrare
integrarecol
colparagrafo
paragrafo
1.6
1.6
La scelta dell’unità di misura è arbitraria
Scelta di un campione:
- accessibile
- riproducibile
- invariabile
Evoluzione nel tempo
*http://physics.nist.gov/cuu/Units/introduction.html
Da
Daintegrare
integrare1.1
1.1ee
1.2
1.2
Unità di misura
Sistema di unità di misura, internazionale
lunghezza metro:
Grandezze
Nome
Simbolo
1972
Fino 1960
1960
Lunghezza
metro
m
Tempo
secondo
s
Massa
kilogrammo
kg
Quantità di materia
mole
mole
Temperatura
kelvin
K
Corrente elettrica
ampere
A
Intensità luminosa
candela
cd
1983
1/40 000 000 meridiano terrestre
distanza tra due tacche in unregolo di Pt- Ir,regolo a parigi
1 650 763,73 lunghezza d’onda della luce rossa emessa da
una lampada dikrypton
Distanza percorsa dalla luce in un tempo = 1/299 792 458
tempo secondo:
Fino al 1960
1/86400 giorno solare medio
Dopo 1960
Frequenza Cs 133
9 192 631 770 Periodo
Massa Kg
*http://physics.nist.gov/cuu/Units/introduction.html
l = 36 ft 3 0.3048 m/ft = 10.9728 m = 11.0 m.
http://physics.nist.gov/cuu/Units/units.html
Multipli e sottomultipli (notazione scientifica)
Prefissi del sistema internazionale
Fattore Prefisso
z
z
z
z
z
z
z
1018
1015
1012
109
106
103
102
exapetateragigamegakilo
etto-
Simbolo
Fattore Prefisso
10-1
10-2
10-3
E
P
T
G
M
10-9
10-15
k
h
Conversione delle unità di misura
http://www.megaconverter.com/Mega2/index.html
deci
centi
milli
10-6
10-12
nano
femto
Simbolo
d
c
m
micro
pico
n
P
p
f
1 ft= 0.3048 m 1= 0.3048 m/ft
l = 36 ft x 0.3048 m/ft = 10.9728 m =
11.0 m.
N.B.
N.B.esercizi
esercizi
Le unità di misura derivate si dicono coerenti con l’unità
fondamentale se si utilizza sempre una unità delle unità campione
fondamentali
.Esempio - la velocità media è lo spazio diviso il tempo necessario a
percorrerlo, se è espressa in:
1 m /1 s = m/s
dimensionalmente [LT-1], questa è coerente con l’unità di misura
fondamentale. Se invece la grandezza velocità è espressa in km/h essa
non è più coerente essendo:
1km / 1 h = 10³ m / 3,6 .10³ s = 1/ 3,6 = 0,278 m/s
Una semplice regola per trasformare le unità di misura delle grandezze
fondamentali in quelle derivate, o viceversa, è quella di moltiplicare per il
quoziente reciproco delle unità di misura da trasformare.
Esempio - a quanto corrispondono 20 m/s in km/h ?
v = 20 m/s x 1 km/10³ m x 3600 s/ 1h = 20 x 3,6 = 72 km/h
Analisi dimensionale
legge fisica equazione tra grandezze
z
dimensione natura della grandezza
es. spostamento L o [L]
z
unità di misura nei due membri devono essere
omogenee uguali dimensioni
Come usarla?
z
Analisi dimensionale
1. verificare la correttezza di un’espressione
v2= 2 a x2 L2T-2=L T-2L2
errata
2
2
-2
-2
v =2ax
L T =L T L corretta
ordini di grandezza
Per fare dei conti approssimati non è necessario utilizzare il
numero che rappresenta la grandezza, basta utilizzare
l’ordine di grandezza potenza di 10 del numero in esame
2. determinare dimensioni di costante
a=-kv
LT-2 = k LT-1 dimensioni di kT-1s-1
es 1050 103
0.09
10-1
0.03
10-2
approssimazioni
N.B.
N.B.esercizi
esercizi
metodo fisico: sperimentale
grandezze fisiche
dimensione
misura
definizione operativa grandezza
determinazione quantitativa
numero e unità di misura
Fondamentali
Lunghezzq [L]
m
Massa
[M] kg
Tempo
[T]
s-1
Derivate
Velocità
[LT-1] m s-1
Forza
[MLT-2] N
http://physics.nist.gov/cuu/Units/introduction.html
Analisi dimensionale
Sistema di unità di misura, internazionale
Grandezze
Nome
Simbolo
Lunghezza
metro
m
Tempo
secondo
s
Massa
kilogrammo
kg
Quantità di materia
mole
mole
Temperatura
kelvin
K
Corrente elettrica
ampere
A
Intensità luminosa
candela
cd
z
z
La legge fisica rappresenta un’equazione
tra grandezze
Sulle dimensioni si possono eseguire calcoli
algebrici
Esempio: verificare che la grandezza ½ a t2 rappresenta una lunghezza
[LT-2][T2] = [L]
Esempio: dimostrare che l’equazione v=v0+ a t è dimensionalmente corretta
[LT-1] =
[LT-1] + [LT-2][T]
http://physics.nist.gov/cuu/Units/units.html
Cifre
Cifresignificative
significative Da
Da
integrare
integrarecol
colparagrafo
paragrafo
1.6
1.6
misura di una grandezza fisica
Le grandezze sono misurabili con un
metodo preciso e riproducibile
•Dirette e indirette
•Strumenti
(prontezza, sensibilità, precisione)
•Errori di misura (casuali e sistematici)
att.ne L’operazione di misura può perturbare il fenomeno da misurare
•Cifre significative legate alla indeterminazione della misura
Regole per operazioni
•Notazione scientifica
prodotto minimo numero cs
somma ultima cs comune
es: 0.015 1.5*10-2
15000 1.5*104 (2 cs) o 1.50 *104 (3 cs)
Conversione delle unità di misura
1 ft= 0.3048 m
1= 0.3048 m/ft
l = 36 ft x 0.3048 m/ft = 10.9728 m = 11.0 m.
Una semplice regola per trasformare le unità
di misura delle grandezze fondamentali in
quelle derivate, o viceversa, è quella di
moltiplicare per il quoziente reciproco delle
unità di misura da trasformare.
Esempio - a quanto corrispondono 20 m/s in
km/h ?
v = 20 m/s x 1 km/10³ m x 3600 s/ 1h = 20 x 3,6
= 72 km/h
http://www.megaconverter.com/Mega2/index.html
N.B.
N.B.esercizi
esercizi
Unità coerenti
con il sistema
fondamentale
N.B le unità si
elidono come
fossero numeri
ordini di grandezza
Misura di un grandezza
sistemi di riferimento
Per fare dei conti approssimati non è necessario utilizzare il
numero che rappresenta la grandezza, basta utilizzare
Sistemi di coordinate:
origine + assi
l’ordine di grandezza potenza di 10 del numero in esame
es 1050 103
0.09
10-1
0.03
10-2
•cartesiane
•polari
approssimazioni
Grandezze scalari e vettoriali
Grandezze scalari
rappresentate da un
numero (scalare)
nella opportuna unità di misura.
Massa
Temperatura
Energia
Pressione
m
T
E
p
Simbolo
Grandezze vettoriali
rappresentate da
numero (modulo)
direzione
verso
nella opportuna unità di misura
velocità
v
forza
F
simbolo
lettera grassetta s, v, F o
frecce o segni sul simbolo
Grandezze scalari e vettoriali
scalari
invarianti
nei diversi sistemi di riferimento
costanti
medesimo valore determinato
con accuratezza in determinate
es: m
condizioni
costanti universali
invarianti in qualsiasi condizione
es: c k h
variabili
assumono valori diversi in un
certo punto e in un certo
istante
operazioni numeriche
vettori
modulo invariante nei diversi
sistemi di riferimento
Operazioni con i vettori
Proprietà ed operazioni con i vettori
Rappresentazione grafica di un
vettore a
Proprietà ed operazioni con i vettori
Prodotto di vettore per uno scalare
a
z
z
Sono tutte rappresentazioni dello
stesso vettore
z
b=ma*
b=-a
a=au
u
Un vettore non dipende dal punto
di applicazione del vettore stesso
Uguaglianza di due vettori
Somma di vettori
a
vettore opposto
versore**
au
* b e a hanno uguali direzioni e verso, il modulo di b è m volte
quello di a
** vettore unitario
Somma di vettori
z
somma di 2 vettori è un
vettore
c= a+b
AC=AB+BC
Proprietà della somma
a+b= b+a
commutativa
(a+b)+c= a+(b+c) associativa
z
diversi modi di calcolarla
1. graficamente
metodo punta-coda
a1+a2= a1 u+ a2 u = (a1+a2) u
2. regola parallelogramma
diagonale maggiore
regole di triangolazione della trigonometria
-a
Differenza di vettori
a-b = d
a+ (-b) = d
Parallelogramma
Diagonale minore
Scomposizione di un vettore
z
Vettore ń
A
Sistema di assi cartesiani
ń = Ax + Ay +Az = vxux + vy uy+vz uz
z
Ax = A cosT Ay = A senT
z
z
=(Ax2+
z
ń
z
Somma
Ay
2)1/2
Somma di vettori
z
z
diagonale rettangolo
R= (a2+b2)1/2
tg T b/a
tanT Ay/Ax
a+b= axux + ay uy+az uz + bxux + by uy+bz uz=
a+b= (ax + bx)ux + (ay + by)uy+ (az +bz) uz
z
http://www.schulphysik.de/suren/Applets.html
z
http://www.interactivephysics.com/simulationlibrary/vectors.html
http://www.engapplets.vt.edu/statics/resultant/ifmres2.html
Prodotto di vettori: scalare
2. Prodotto scalare
il prodotto scalare tra due vettori ha come risultato
una grandezza scalare
calcolo e proprietà
s = a · b = a b cosT
a cosTb = b cosTa
a·b=b·a
commutativa
2
a·a=a
Esempi
Vettori perpendicolari
z
Somma di più vettori
Somme successive
Componenti dei vettori
somma delle stesse
Rx= ax+ bx+ cx
Ry= ay+ by+ cy
tg T Ry/ Rx
e
Prodotto di vettori: scalare
calcolo con le componenti
a · b = (axux + ay uy+az uz) ·( bxux + by uy+ az uz )=
a · b =ax bx+ ay by+ az bz
ux· ux = uy · uy = uz · uz=1
ux· uy = uy · uz = uz · ux=0
Non si può definire il prodotto scalare di 3 vettori,
no associativa
Prodotto di vettori: vettoriale
Prodotto tra due vettori che dà
un vettore
z
c=axb
Modulo c= a b senT area
Direzione perpendicolare al piano
z
verso avanzamento vite destrorsa,
z
Prodotto di vettori: vettoriale
proprietà
z
axb=-b xa
anticommutativa
a x (b x c) z - (a x b) x c
z
calcolo con le componenti
c = a x b determinante di matrice
a x b = (axux + ay uy+az uz) ·( bxux + by uy+ az uz )=
=(ay bz -az by) ux + (az bx -ax bz) uy + (ax bx -ay bx) uz
uxx ux = uy x uy = uz x uz=0
uxx uy = uz uyx uz = ux uzx ux = uy
individuato da a e b
cavatappi, mano destra
z
Vedi web
z
http://www.schulphysik.de/suren/A
pplets.html
z
http://www.schulphysik.de/suren/Applets.html
Altre operazioni
z
z
z
z
Momento di un vettore rispetto ad un punto
Mo =OP x v
Derivata di un vettore
vettore
Integrazione di un vettore integrale componenti
Gradiente di una funzione scalare
Il punto per controllare le
conoscenze
•Unità di misura conoscenza delle unità fondamentali
•Eseguire l’analisi dimensionale di un’equazione
•Convertire le unità di misura
•Vettori
•Distinguere le grandezze scalari e quelle vettoriali
•Scomporre un vettore nelle sue componenti
•Eseguire operazioni con i vettori e con le loro compone
•Versori: capire l’uso per l’espressione di un vettore
Cinematica
Cosa studia?
il moto di un corpo
indipendentemente dalle cause
che lo determinano
Perché?
è uno dei principali effetti
evidenziati su un corpo, soggetto a
diversi fenomeni naturali, interazioni
Come è definita? variazione della posizione nel tempo
fenomeno misurabile, diverse cause
esempi (terra-sole, elettrone-atomo)
Come si misura? rappresentazione (coordinate, unità)
modello
Cinematica: moto di un corpo
Come si misura?
è necessario conoscere la
posizione di un corpo (coordinate)
in funzione del tempo (unità)
Quale corpo si muove?
in generali tutti gli oggetti,
estesi con diverse forme e proprietà
rigido, elastico
il suo moto perciò può essere complicato.
modello di punto materiale o particella
corpo privo di dimensioni, ovvero dimensioni trascurabili rispetto
alle distanze considerate
Moto rettilineo: descrizione
posizione di un punto materiale
coordinate in un sistema di riferimento -x(t)in funzione del tempo
posizione
x=x(t)
spostamento vettore
'x= xf - xi = x(tf) - x(ti)
Caso particolare: quiete
x(t)=cost
'x= 0
tempo
(s)
0
1
3
4
5
6
7
8
10
11
12
Tabella
posizione
(m)
-2,0
-2,0
-2,0
-1,5
0,0
2,5
6,0
6,0
6,0
4,0
4,0
Diagramma orario
Cinematica: spostamento - tempo
z
traiettoria: luogo dei punti occupati successivamente
dal punto
z
spostamento: variazione posizione tra due
istanti vettore
Spostamento z traiettoria
Quiete: particolare tipo di moto con variazione nulla
moto rettilineo moto in una sola direzione
viene
descritto da una sola componente, una sola variabile
rappresenta il moto di molti sistemi fisici (caduta grave-molla
Moto rettilineo:
velocità
Velocità media
<v> = 'x/'t =
= (xf - xi) / (tf - ti) m/s
Esempio
<v> =4-(-2)/ 12-0 = 0,5 m/s
Moto rettilineo:velocità
interpretazione grafica
pendenza retta congiungente
i punti iniziale e finale del
diagramma spazio-tempo
segno xf
> xi
v>0
velocità aumenta
quando il corpo si sposta
verso x positive
n.b.
•non dipende dalla traiettoria
•Non rappresenta la velocità del corpo in un determinato istante
Moto rettilineo uniforme
il punto materiale percorre
spazi uguali in tempi uguali
z <v> = 'x/'t
v = 'x/'t = cost
grandezze misurate t, x
grandezza derivata v
Operazione inversa
determinazione spostamento da
velocità media
'x= <v> 't
grandezze misurate
grandezza derivata
t, v
x
Moto rettilineo vario:velocità
v= dx/dt
Calcolo di v dallo spostamento
Si determina la funzione x=x(t)
legge oraria
Si calcola la derivata
Si calcola il suo valore nel
momento desiderato
z
Es. x=3 t2
v=dx/dt=6 t
t=3
v= 18 m/s
Moto rettilineo vario:velocità
v=lim 'x/'t = dx/dt
'to0
m/s
Rapidità della variazione
temporale della posizione
nell’istante t
pendenza della retta tangente
alla curva nel punto P
n.b.
segno
velocità istantanea = velocità
Velocità istantanea e media
v = lim 'x/'t= dx / dt
'to0
moto uniforme: spazi uguali
in tempi uguali v =cost
<v>= v
solo in questo caso
equazione oraria
x(t)=a + b t
b=v
a = x0 (condizioni iniziali)
Moto rettilineo: equazione oraria
•Problema inverso:
determinazione della posizione
(legge oraria) quando è nota la
velocità (istantanea)
v=dx/dt
v dt = dx
•³0t v (t) dt = ³x0x dx
•x(t)= x0 + ³0t v (t) dt
Se v= cost moto rettilineo uniforme
•x(t)= x0 + v(t-t0)
•
Moto rettilineo: accelerazione
Variazione velocità nel tempo
Moto rettilineo: accelerazione
Variazione velocità nel tempo
accelerazione (istantanea)
Si conosce la velocità v= v(t)
accelerazione media
a=lim 'v/'t=dv/dt= d/dt(dx/dt) = d2x/dt2
<a> = 'v/'t= (vf - vi) / (tf - ti)
[L] / [T] *[T] m/s2
'to0
pendenza della curva v(t)
segno
positivo vf >vi maggiore di 0
se v e a stesso verso modulo velocità aumenta
il segno di a non ha il segno dello spostamento
Es:
Es:(20-10)/1
(20-10)/1aumento
aumento
|v|
|v|
(-10-(-20))/1
(-10-(-20))/1
diminuzione
diminuzione
|v|
|v|
Moto rettilineo: accelerazione
Problema inverso:
determinazione di v se è nota a
a dt = dv
³0t a (t) dt = ³v0v dv
v(t)= v0 + ³0t a (t) dt
accelerazione
velocità
Moto uniformemente accelerato a = cost
a = dv/dt
a dt = dv
v=dx/dt
segno
v>0 corpo si muove
verso x crescenti
segno
a=dv/dt=d2x/dt2
³0t a dt = ³v0v dv
a>0 vfin> vin
v = v0 + at
Problema inverso
Problema inverso
posizione conoscendo la velocità
x(t)= x0 + ³0t v (t) dt
•Moto uniforme v= cost
•x(t)= x0 + v(t-t0)
esercizi
velocità conoscendo l’accelerazione
v(t)= v0 + ³0t a (t) dt
posizione conoscendo la velocità
x(t)= x0 + ³0t v (t) dt
Casa succede se a= cost
dv/dt=x
*v = v0 + at
³0t v dt = ³0t (v0 + at) dt
<v>=1/2 ( v0 + v)
³x0x (dx/dt)dt
=
³0t (v0 + at) dt
#x = x0 + v0 t + ½ at2
*t = (vx –v0)/a
#vx2 = v02 + 2 a (x – x0) manca t
#(x – x0) = ½ (vx +v0 ) t manca a
Moto uniformemente accelerato a = cost
Spostamento-velocità e accelerazione
v = v0 + at
#x = x0 + v0 t + ½ at2
#vx2 = v02 + 2 a (x – x0) manca t
#(x – x0) = ½ (vx +v0 ) t manca a
velocità
accelerazione
a=dv/dt= d2x/dt2
v = dx/dt
Problema inverso
posizione da velocità
t
³0 v (t) dt =
³x0x
dx
x(t)= x0 + ³0t v (t) dt
³0t a (t) dt = ³v0v dv
v(t)= v0 + ³0t a (t) dt
Spostamento-velocità e accelerazione
Moto uniforme
Moto uniformemente accelerato
v(t) = cost
a(t) = cost
x(t)= x0 + v(t-t0)
v = v0 + at
x = x0 + v0 t + ½ at2
vx2 = vx02 + 2 ax (x – x0) manca t
(x – x0) = ½ (vx +vx0 ) t manca a
variabili
v
Condizioni iniziali v0
x
t
x0
t0
http://physics.bu.edu/py105/simulations.html
http://physics.bu.edu/py105/simulations.html
Moto verticale di un corpo
Come risolvere problemi?
•raffigurarsi il problema (semplificato)
Corpo sottoposto a gravità
a= g = 9.8 m/s2 diretta verso il basso
•rappresentazione pittorica o grafica
•scegliere coordinate
•controllare le unità di misura
•scrivere i parametri iniziali e le grandezze
da definire
•individuare le leggi
vy2 = v02 - 2 g (y – y0)
v = v0 – gt
y = y 0 + v0 t - ½
gt2
(y – y0) = ½ (vy +v0 )
esempi
z
Corpo in caduta libera vedi slide 1
z
v0= 0
y0 = h =10 m
Tempo di volo: 0 = h + 0 t - ½ gt2
•Controllare il risultato
Velocità al suolo
v = 0 – gt
t= (2h/g)1/2 = 1.4s
v=(2gh)1/2 = 14m/s
domande: cosa succede sulla luna? (3.4-5.7)
Moto verticale di un corpo: esempi
Moto nel piano:
posizione e velocità
Corpo sottoposto a gravità a=g= 9.8 m/s2 diretta verso il basso
v = v0 – gt
vy2 = vy02 - 2 g (y – y0)
• Raggio vettore
y = y0 + v0 t - ½ gt2
r(t)=x(t) ux + y(t) uy
• Velocità media
z
(y – y0) = ½ (vy +vy0 )
Corpo lanciato verso l’alto (da terra)
v0= v2
y0 = 0
v = v2 – gt
y = 0 + v2 t - ½ gt2
Nb i segni dipendono dall’orientazione dell’asse y in questo caso verso l’alto
r(t)
descrizione in un sistema di coordinate cartesiane
piano
<v> = 'r/'t= (rf - ri) / (tf - ti) m/s
• Velocità
v = lim (r(t+'t)-r(t)) /'t= dr/dt
'to0
v = dr/dt
dir tangente alla traiettoria
http://www.interactivephysics.com/images/simulationimages/motioninonedimension/spacetimediagram.gif
Non dipende dal sistema di riferimento
velocità
velocità
v = dr/dt
direzione tangente traiettoria
dr=ds ut
ds spostamento infinitesimo
v=(ds/dt) ut =v ut
•
Problema inverso
t
r(t)= r0 + ³0 v (t) dt
In un sistema di riferimento cartesiano
v = d/dt (x ux + y uy + z uz ) =
vx ux + vy uy+ vz uz *
Moto nel piano:accelerazione
z
Accelerazione
media
<a> = 'v/'t
z
m/s2
Accelerazione
a = dv/dt =
=d2 r/ dt2 m/s2
In un sistema di riferimento cartesiano
v = dr/dt
v =d/dt (x ux+y uy+z uz) =vxux+vy uy+vz uz *
Problema inverso
r(t)= r0 + ³0t v (t) dt
Integrali per componenti
In un sistema di riferimento polare r=rur
v =d/dt (rur) = dr/dt ur + r dur/dt =
= dr/dt ur + r dT/dt uT (r) =vr+vT
Moto nel piano:accelerazione
a=d/dt (vut) =
= (dv/dt)ut + v(dut/dt) derivata di versore
= (dv/dt)ut + v(d)/dt)un
(dv/dt) ut = at
parallela a v
variazione del modulo
v (d)/dt) un = an
ortogonale a v
variazione direzione di v
R d) = ds
ds/dt=v
d)/dt= (d)/ds) (ds/dt)= v/R
a = (dv/dt) ut + v2/R un= at + an
• a= (at2 + an2)1/2
Moto nel piano:accelerazione
coordinate cartesiane
z
Accelerazione media
<a> = 'v/'t=
=('vx/'t)ux+('vy/'t)uy+('vz/'t)uz
z
Accelerazione
a = dv/dt =
=d/dt (vx ux + vy uy + vz uz) =
=(dvx/dt)ux+(dvy/dt)uy+(dvz/dt)uz*=
ax=(dvx /dt), ay = (dvy /dt),az = (dvz /dt)
Moto in due direzioni con accelerazione costante
v= v0+ a t
vx=v0x+axt
vy=v0y+ayt
r= r0+ v0t+ ½ at2
x= x0+voxt+½axt2
y= x0+voyt+½ayt2
*Se il sistema non ruota
accelerazione
velocità
v=dr/dt
v=(ds/dt) ut =v ut
a=dv/dt
a =d/dt(v ut)=(dv/dt)ut + v(dut/dt) =
(dv/dt) ut+ (v2/R) un
a= at + an
In un sistema di riferimento cartesiano
In un sistema di riferimento cartesiano
v = vx ux + vy uy+ vz uz *
a = d/dt (vx ux + vy uy + vz uz) =
ax uy + ay uy + az uy
•Problema inverso
•r(t)= r0 + ³0t v (t) dt
du
dut t/dt=
/dt=(d)/dt)
(d)/dt)uunn
d)/dt=
d)/dt=(d)/ds)
(d)/ds)(ds/dt)=
(ds/dt)=v/R
v/R
RRd)
=
ds
ds/dt=vdu
d) = ds
ds/dt=vdut
t
Problema inverso
v(t)= v0 + ³0t a (t) dt
posizione conoscendo la velocità
x(t)= x0 + ³0t v (t) dt
Moto nel piano:accelerazione
a=d/dt (vut) =
= (dv/dt)ut + v(dut/dt) derivata di versore
= (dv/dt)ut + v(d)/dt)un
(dv/dt) ut = at
parallela a v
variazione del modulo
v (d)/dt) un = an
ortogonale a v
variazione direzione di v
R d) = ds
ds/dt=v
d)/dt= (d)/ds) (ds/dt)= v/R
a = (dv/dt) ut + v2/R un= at + an
• a= (at2 + an2)1/2
Moto nel piano:accelerazione
coordinate cartesiane
z
Accelerazione media
<a> = 'v/'t=
=('vx/'t)ux+('vy/'t)uy+('vz/'t)uz
z
Moto in due direzioni con accelerazione costante
v= v0+ a t
vx=v0x+axt
Accelerazione
a = dv/dt =
=d/dt (vx ux + vy uy + vz uz) =
=(dvx/dt)ux+(dvy/dt)uy+(dvz/dt)uz*=
ax=(dvx /dt), ay = (dvy /dt),az = (dvz /dt)
vy=v0y+ayt
r= r0+ v0t+ ½ at2
x= x0+voxt+½axt2
y= x0+voyt+½ayt2
*Se il sistema non ruota
Moto parabolico di un punto
Moto nel piano
Moto di particella lasciata libera con
vin di qualunque direzione nel piano
z
componente x v costante
ax =0
z
componente y
a costante
ay =g
z
condizioni iniziali
v0 con direzione -0
vox=v0 cos-0
voy=v0 sen-0
Moto parabolico di un punto
Equazioni del moto:
vx=vox=v0 cos-0=cost (1)
vy=voy–gt =v0sen-0-gt
(2)
x=voxt= (v0 cos-0) t (3)
y=voyt-1/2 gt2=(v0sen-0)t-1/2 gt2 (4)
La risoluzione dei due sistemi permette di calcolare:
traiettoria
y= (tan -0) x- (g x2)/ 2 (v0 cos -0)2 (3) in (4)
altezza massima
vy=0
tmax =v0 (sen -0) / g (2 v=0)
h= ( v02 sen2 -0) /2g
gittata
y=0, x=0
t=2 tmax
xmax = (2 v02 sen -0cos -0) / g
xmax= v02 sen 2-0) / g
Sistema di riferimento
1.
Origine tetto
2.
Origine pavimento
Tempo di volo
yf=y0 +v0yt-1/2 gt2
1. –45m=0+ 20.0m/s(sen30)t–1/2 9.8m/s2 t2
t= 4.22 s
xg=(2v02 sen-0cos-0)/ g
dxg/dT = 0
T = 45
t = -2.18 s
2.
0m=45m+ 20.0m/s(sen30)t–1/2 9.8m/s2 t2
t= 4.22 s
x finale
x=voxt= 20.0m/s (cos30) 4.22s= 73.13 m
v finale
vy=voy–gt = 20.0m/s (sen30)- 9.8m/s2 4.22s
-31.4 m
Moto circolare
•Moto piano la cui traiettoria è una circonferenza
1 descrizione
con riferimento allo spazio percorso s(t)
riferimento cartesiano
posizione
x(t) = R cos-(t) m
y(t) = R sen-(t) m
velocità
vPx = v cos-(t) m/s
vPy = v sen-(t) m/s
Corrisponde a descrizione in coordinate polari
Moto circolare
Velocità nel moto circolare
2 descrizione con riferimento all’angolo
T(t) sotteso da s(t)
angolo
T(t) = s(t)/R
definizione velocità nel piano
r=r ur
v = dr/dt
v= (dr/dt)ur+rdur/dt =
v
R
= (dr/dt)ur + r(dTr/dt)uT
dr/dt=0 moto circolare v=R Z
velocità angolare
Z= d- /dt =(1/R) ds/dt =v/R rad/s
Nb Z vv
• Moto uniforme » v» e Z costanti
s(t) =s0 + vt
-(t) =-0 + Zt
solo » v» costante moto accelerato
Moto circolare: accelerazione
Moto circolare:periodo
accelerazione
<a> = ' v/ ' t
<a> =(v 'r) /(r 't)
ar= v2/r = Z2 r m/s2
Tempo necessario per compiere una
rivoluzione completa
' v/v= ' r/r
normale o radiale
Spazio
circonferenza 2Sr
v= 2Sr /T
T= 2Sr/v= 2S/Z
'v/v='r/r
Moto circolare: accelerazione
a = d/dt (v ut) = (dv/dt) ut + v2/R un
at
an
2
2
Moto vario a = (at + an ) 1/2
accelerazione angolare
D=dZ/dt=d2T/dt2 =1/R dv/dt= at/R
Moto circolare
•Problema inverso
Z(t)= Z0 + ³0t D (t) dt
T(t)= T0 + ³0t Z (t) dt
Moto circolare uniformemente accelerato
T(t)= T0 + Z dt + ½ D t2
Moto periodico
T= 2Sr/v = 2S/Z
periodo
x(t) = R cos-(t) = R cos(Z(t)+ -0)
y(t) = R sen-(t) = R sen(Z(t)+ -0)
A
Z
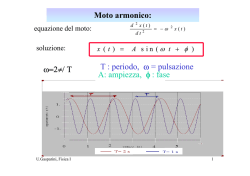
Moto armonico
ampiezza moto m
Pulsazione
s-1
I
fase iniziale
A e I condizioni iniziali
Z caratteristica del moto
Moto vario lungo un asse rettilineo
legge oraria : x(t) = A cos (Zt +I
moto periodico:
oscillazione con estremi –A e A
Periodo: tempo necessario affinché
il punto compia un ciclo completo
del moto
in un tempo T detto periodo
t e t’
t’-t=T x(t)=x(t’)
Zt’ +I = Zt+I +2S
frequenza: numero oscillazioni
nell’unità di tempo
T= 2SZ s Z= 2S7pulsazione
Q=1/T= Z/2S
1/s=Hz
frequenza
x(t) = A cos (Zt +I
v(t) = dx/dt=-A Z sen (Zt +I
a(t) = dv/dt= d2x/dt2 =-A Z2cos (Zt +I =-Z2x
x0 = A cos I
v0 = -A Z sen I
tg I = v0 / Z x0
A= (x02+(v0/ Z)2)1/2
Massa-molla
pendolo
xmax = A
vmax = Z A
amax = Z2 A
Moti relativi
Moti relativi: Sistemi di riferimento in moto
vettore posizione r dipende da
sistema di riferimento
r = OO’ + r’= vot + r’
v = dr/dt= d OO’/dt + dr’/dt
v = vo + v’
'r non dipende da sistema di
riferimento
r = OO’ + r’
r’ = r - OO’ = r -vot
v’ =dr’/dt=dr/dt- d OO’/dt
v’ = v- vo
a= dv/dt = dvo/dt + dv’/dt = a’
* se il sistema non ruota
v = dr/dt= d OO’/dt + dr’/dt
@ se v << c
v non dipende da sistema di
riferimento se fisso
•Spostamento e traiettoria
•velocità media e velocità istantanea in un moto rettilineo: definizioni,
differenze
•Accelerazione media ed istantanea in un moto rettilineo
•Costruire il grafico posizione-tempo, e scrivere l’equazione del moto
•Calcolare velocità ed accelerazione dalle equazioni del moto o dai
grafici
•Calcolare lo spostamento a partire dalla velocità o dall’accelerazione
•Moto uniforme
•Moto uniformemente accelerato
•Corpo in caduta libera: descrizione delle equazione della cinematica,
individuazione del moto ed individuazione di tutti i parametri del moto
•Descrizione dei vettori spostamento velocità e accelerazione di un
punto in moto nel piano x-y
•Descrizione del moto nel piano come due moti indipendenti (sistemi di
equazioni)
•Moto di un corpo nel piano sottoposto solo g
•Moto di un corpo lungo una circonferenza: relazione tra velocità e
velocità angolare
•Moto di un corpo lungo una circonferenza: accelerazione con le sue
componenti tangenziale e normale, capire il loro significato
•Accelerazione in un moto circolare uniforme
•Accelerazione angolare
•Relazione tra moto circolare e la sua proiezione lungo il raggio
•Moto armonico
•Il risultata della misura del moto (posizione, velocità, accelerazione)
dipende dal sistema di riferimento
•posizione, velocità, accelerazione in due sistemi di riferimento diversi
e che si muovono con velocità relativa costante
Moti relativi: Sistemi di riferimento in moto
composizione di vettori
r = OO’ + r’= vot + r’
v = dr/dt= d OO’/dt + dr’/dt
v = vo + v’
a= dv/dt = dvo/dt + dv’/dt = a’
* se il sistema non ruota
@ se v << c
r’ = r - OO’ = r -vot
v’ =dr’/dt=dr/dt- d OO’/dt
v’ = v- vo
Moti relativi
sistema di riferimento SR
vettore posizione r dipende da SR
descrizione di 'r in un
Sistema con origini in O’ traslato rispetto a O
r = OO’ + r’
v = dr/dt= d OO’/dt + dr’/dt
v non dipende da
sistema di riferimento se fisso
•Spostamento e traiettoria
•velocità media e velocità istantanea in un moto rettilineo: definizioni,
differenze
•Accelerazione media ed istantanea in un moto rettilineo
•Costruire il grafico posizione-tempo, e scrivere l’equazione del moto
•Calcolare velocità ed accelerazione dalle equazioni del moto o dai
grafici
•Calcolare lo spostamento a partire dalla velocità o dall’accelerazione
•Moto uniforme
•Moto uniformemente accelerato
•Corpo in caduta libera: descrizione delle equazione della cinematica,
individuazione del moto ed individuazione di tutti i parametri del moto
Dinamica del punto materiale
Le leggi del moto esprimono il legame
tra la variazione del moto di un punto
e le sue cause
variazione
quali cause?
stato di
interazione con ambiente
moto
Definizione operativa
FORZE
grandezza vettoriale
natura delle forze
•Descrizione dei vettori spostamento velocità e accelerazione di un
punto in moto nel piano x-y
•Descrizione del moto nel piano come due moti indipendenti (sistemi di
equazioni)
•Moto di un corpo nel piano sottoposto solo g
•Moto di un corpo lungo una circonferenza: relazione tra velocità e
velocità angolare
•Moto di un corpo lungo una circonferenza: accelerazione con le sue
componenti tangenziale e normale, capire il loro significato
•Accelerazione in un moto circolare uniforme
•Accelerazione angolare
•Relazione tra moto circolare e la sua proiezione lungo il raggio
•Moto armonico
•Il risultata della misura del moto (posizione, velocità, accelerazione)
dipende dal sistema di riferimento
•posizione, velocità, accelerazione in due sistemi di riferimento diversi
e che si muovono con velocità relativa costante
Forza
1 energia fisica, robustezza, vigoria del corpo o delle sue
membra: potenza muscolare, vigore: colpire, spingere con f.;
spec. al pl., efficienza generale dell’organismo:
3a energia spirituale, capacità di resistenza morale, spec. di
fronte a ostacoli e avversità; coraggio, animo: 3b convinzione,
impegno deciso: sostenere qcn. con f.
3c spec. al pl., doti, qualità personali, o, anche, mezzi economici,
disponibilità finanziarie di qcn.: contare sulle proprie forze,
emergere, farsi strada con le proprie forze
12 TS fis., grandezza vettoriale che descrive la sollecitazione cui
è sottoposto un corpo materiale, definita nel secondo principio
della dinamica (simb. 3f, F)
Le leggi del moto di Newton
A partire dai testi di Galileo (15641642) e di Cartesio
Newton (1642-1727) enunciò le
tre leggi della meccanica, con cui
si aprono i Principia.
1ª legge o principio d’inerzia
Ogni corpo permane nel suo
stato di quiete o di moto
rettilineo uniforme, a meno che
non sia costretto a mutare tale
stato da forze impresse
Le leggi del moto di Newton I
principio di inerzia
Le leggi del moto di Newton
un corpo libero (non soggetto a forze) permane nel
suo stato di moto
Forza:
Esprime la tendenza di un corpo a rimanere in quiete se è in quiete, a
continuare a muoversi di moto rettilineo uniforme, se è in moto
Definizione operativa misura
6iFi= 0
v=cost
interazioni diverse su stesso oggetto
v=cost
a=0
sistema di riferimento inerziale
un corpo di massa maggiore ha più inerzia di
un corpo di massa minore
massa inerziale m: proprietà
intrinseca di un corpo che misura la
sua risposta ad una forza esterna
grandezza che misura interazione tra
ambiente e punto
statica : dinamometro
dinamica: cosa si
F2/F1=a2/a1
interazioni uguali su oggetti diversi
m1/m2=a2/a1
F= m a
kgms-2=N
Grandezza vettoriale con le regole di Somma*
misura?
massa inerziale m:
proprietà intrinseca
di un corpo che
misura la sua risposta
ad una forza esterna
Le leggi del moto di Newton II
F= m a
6i Fi = ma
particella è sottoposta a più forze,
ovvero ad una forza risultante
in assenza di interazione a=0 v=cost
I legge inerzia
6i Fi = 0
equilibrio
II legge inerzia
6i Fi = ma
N.B.: dallo studio
del moto
otteniamo
informazioni solo
sulla risultante
delle forze agenti
sul corpo
Risultante delle forze
R= F1 + F2 + F3 + F4 + …… =6i Fi
relazione vettoriale, in coordinate cartesiane
Rx= F1x + F2x + F3x + F4x + …… =6i Fix
Ry= F1y + F2y + F3y + F4y + …… =6i Fiy
Rz= F1z + F2z + F3z + F4z + …… =6i Fiz
•R=0 moto uniforme (equilibrio)
R=0 Rx= Rx=Rz= 0
•R=cost (direzione e verso) moto uniformemente accelerato
•R variabile
Le leggi del moto di Newton II
moto vario
relazione vettoriale
F= ma =m at +m an =m (dv/dt) ut +m (v2/r) un
Legge vettoriale
6i Fix = max
6i Fiy = may
6i Fiz = maz
Massa proprietà del corpo
Peso
m Kg
forza gravitazionale che agisce sul corpo di massa m Fg
Fg= mg
Risultante delle forze
N
Le leggi del moto di Newton III
Applicazione delle leggi di Newton:
azione delle forze
quantità di moto p = mv
Risoluzione problemi
F = m dv/dt = d(mv)/dt= dp/dt
p = mv
Kg m s-1
Sistema di 2 corpi isolati, misuriamo la quantità di moto
p1 + p2 = p1’ + p2’ = cost
dp1 /dt + dp2 /dt =0
1.
2.
3.
4.
z
In un sistema isolato la quantità di moto è costante
5.
z
III legge inerzia
6.
F12 = - F21
individuazione del corpo
definizione del sistema di riferimento
determinazione forze agenti sul punto
costruzione del diagramma di corpo
libero
applicazione delle leggi di Newton in
ciascuna direzione (sistema rif. x, y, z)
risoluzione delle equazioni del moto,
usando le leggi della cinematica
Classificazione delle forze
Quali tipi forze?
Gravitazionali
Elettromagnetiche
Forti
Deboli
Esempi
Applicazione delle leggi di Newton:
Le leggi del moto di Newton
z
1ª legge o principio d’inerzia
z
6i Fi = ma
z
azione delle forze
Risoluzione problemi
1.
2.
F12 = - F21
3.
4.
5.
6.
forza peso
individuazione del corpo
definizione del sistema di riferimento
determinazione forze agenti sul punto
costruzione del diagramma di corpo
libero
applicazione delle leggi di Newton in
ciascuna direzione (sistema rif. x, y, z)
risoluzione delle equazioni del moto,
usando le leggi della cinematica
reazioni vincolari
normale
P=mg
g=9.8m/s2 verso il basso
m=1 kg
P=9.8 N
P = costante
produce un moto uniformemente accelerato
m
tensione
P
T
m
P+T=0
T = -mg
m
P
P
Sulla terra tutti i corpi sono soggetti alla forza
peso, se non si muovono vuol dire che esiste almeno
un’altra forza uguale in modulo, contraria in
direzione applicata allo stesso
P + N= 0
per ogni punto del filo
Caratteristiche filo:
inestensibile
m=0
Cambiamento direzione
Applicazioni: forza peso:
piano inclinato
pendolo
P+T=ma
P + N = ma
m g sen D = ma
m g cos D 1 = 0
N
y
arco
RN = -m g cos T7
7 = m aN
mg
N = m g cos D
Moto uniformemente accelerato
componenti:
tangente at =DR=(d2T/dt2)R
Rt = -m g sen T = m at
D
x
traiettoria s
normale aN = v2/R
Rt nella direzione del moto:
Rn tensione filo
indipendente da m
T= m (g cos Tv2/L)
d2T/dt2= -(g/L) sen TTpiccolo
a<g dipende dall’angolo
d2T/dt2= -(g/L) T
Moto armonico
Z2=g/L
indipendente da m e T
T=2S(L/g)1/2
s = L T cos (Zt +I
Forze di attrito
Forze di attrito
1. particella non si muove nonostante
presenza di F
2. presenza Fa
N
N
Fa
Fa =F
F
m
P
3. Fa d PsN Ps coefficiente di attrito statico
I
N-P0 N= P-F sen T
Fa+F= 0 Fa=-F
F2dFa= Ps N = Ps mg
II
N-P+F1= 0 N= P-F sen T
Fa+F2= 0 Fa=-F2 = -F cos T
F2dFa= Ps N = Ps (P-F sen T
Fa N
F1 F
F2
m
P
Forze di attrito
Coefficienti di attrito
Materiale
Come determinare il
coefficiente di attrito?
P + N = ma
mg sen T fs= ma
x
m g cosT 1 = 0
y
mg sen T P mg cos T=ma
x
a= (senTP cosTg
se tg D<Pil corpo non si muove
Pd=tg Ta=0 moto uniforme
Forze viscose F=-bv
Applicazioni: forza peso:
piano inclinato
In assenza di attrito
P + N = ma
Dinamico o Radente
0.74
0.11
0.61
0.53
0.51
0.94
0.68
0.04
0.04
0.001
0.027
0.7
0.65
0.4
0.2
0.1
0.57
0.05
0.47
0.36
0.44
0.40
0.53
0.04
0.04
0.001
0.014
0.3
0.5
0.35
0.15
0.97
N
Forza elastica: molla
mg
In presenza
di attrito
D
m g sen D = ma
x
mg sen D P N= ma x
m g cos D 1 = 0
y
m g cos D 1 = 0
direzione: retta
Verso: sempre verso punto O (richiamo) forza centrale
P + N = ma
F=-kx
(1)
dalla II legge di Newton
y
N = m g cos D
N= m g cos D
moto uniformemente accelerato in
direzione x
a= (sen DP cos Dg
a=g sen D <g
se tg D<Pil corpo non si muove
dipende dall’angolo
Statico
Acciaio su acciaio
Acciaio su acciaio lubrificato
Alluminio su acciaio
Rame su acciaio
Ottone su acciaio
Vetro su vetro
Rame su vetro
Teflon su teflon
Teflon su acciaio
Acciaio su aria
Acciaio su ghiaccio
Legno su pietra
Gomma su cemento asciutto
Gomma su cemento bagnato
Gomma su ghiaccio asciutto
Grafite su grafite
Gomma su asfalto
Pd=tg Ta=0 moto uniforme
F= ma = - kx per 1
= a = F/m = -(k/m) x
2
2
d x/dt = -Z2 x
Moto armonico
con Z= (k/m)1/2
T = 2S (m/k)1/2
x(t) = A cos (Zt + I
d2x/dt2
Forze centripete
Forze centripete
Non è un tipo di forza, ma il nome che si dà alla componente
ortogonale alla traiettoria della risultante delle forze agenti
FN= m an=m (v2/r) un
Se il moto è circolare uniforme F=FN
Forza centripeta
es. 1
auto in curva con raggio r
Ps
v? per mantenere la curva
Fs =ma=mv2/r
Fs =PsN=Ps mg
mv2/r= Ps mg
v= (Ps g r)1/2
N
P
Forze centripete
Curva sopraelevata
determinare le condizioni affinché un corpo con velocità v percorra a
velocità costante una curva sopraelevata
r
y
tg T
N sen T mv2/r
F
a(t)
x(t)
x(t)
a(t)
F
F, s
v(t)
N cos Tmg=0
v2/rg
Fs
Lavoro: definizione
F
a(t)
x(t)
Cosa produce lavoro?
x(t)
a(t)
F
F (vettore)
agisce su punto materiale
Quando si ha lavoro?
il punto si sposta
Come si definisce il Lavoro W
F, s
S (vettore)
prodotto da F?
W = ³J Fxds =³ab Ft ds
v(t)
W grandezza scalare
dimensioni: N m= kg m2s-2= J
Lavoro: definizione
Lavoro di una forza costante
W= Fxs = F s cos-
s=0
W=0
F non compie lavoro se non produce spostamento
W= Rxs = F1xs + F2xs + ….. =W1+ W2+..=6 iWi
I° caso particolare
Lavoro svolto da una forza costante
(modulo e direzione) e spostamento rettilineo
F~~s
W=F s
F~~s
W= Fxs = F s cosW= Fxs
d-S
S<-dS
Lavoro prodotto da più forze costanti
lavoro motore
lavoro resistente
Esempio Forza
peso
1. moto lungo y
corpo sale
corpo scende
W= (mg)xs=
(mguy )x 'yuy= -mgd
W=mgd
Lavoro di una forza costante
W= Fxs = F s cos-
Ricorda il prodotto scalare
C=AxBa
b cosT
a cosTb = b cosTa
a · b = b · a commutativa
a · a = a2
2. piano inclinato W=mgsenT l=mgd
calcolo con le componenti
a · b = (axux + ay uy+az uz) ·( bxux + by uy+ az uz )=
a · b =ax bx+ ay by+ az bz
ux· ux = uy · uy = uz · uz=1
ux· uy = uy · uz = uz · ux=0
Lavoro prodotto da più forze W= Rxs = F1xs + F2xs + ….. =W1+ W2+..=6 iWi
Lavoro svolto da F variabile
Lavoro svolto da F variabile
in generale: spostamento del corpo lungo una traiettoria nello spazio
caso particolare
lo spostamento del corpo avviene lungo una retta
Lavoro elementare
dW = Fxds
b
W = ³J Fxds =³a Ft ds
Se 'x piccolo si può assumere F costante
'W = Fx 'x
W= 6Fx 'x
Per 'xo0
d W = Fx dx
W = ³ab Fx dx
F1
'x
F
ds
W = ³J Fxds =³J (F1+ F2+…. Fn)xds =W1+ W1+….. Wn
F2
'x
N.B. l’integrale è eseguito lungo una linea
l’integrale può variare al variare della linea di integrazione
Il lavoro dipende dal percorso
lavoro svolto da una molla
F=-kxux
W= ³J dW=³J Fxds=
³if(-kx) ux x dx ux= ³if Fx dx=
=³if (-kx) dx = -k ³if x dx =
= -½ k (xf2 - xi2)
Lavoro svolto dalla forza della
molla sul blocco
Lavoro svolto da una forza esterna
sulla molla
W= ½ k (xf2 - xi2)
Energia cinetica
dW = Fxds =Ft ds= mat ds=m (dv/dt) ds =
= m dv (ds/dt) =m v dv =
Wab = ³J Fxds =³ab Ft ds==³ab m v dv
= ½ m vb2 - ½ m va2 = Ek,b - Ek,a= 'Ek
Teorema dell’energia cinetica
N.B. Lavoro come trasferimento di energia
Se il lavoro è positivo aumenta la velocità del corpo
Ek = ½ m v2 J
N.B Non si è fatta alcuna ipotesi sul tipo di forza
lavoro delle forze di attrito
Wab = ³J Fatxds= ³J- P N utxds = -P N ³J utxds =-P N ³J ds
Lavoro delle forze di attrito dipende dal percorso
Per il teorema dell’energia cinetica
Wab =- P N ³J ds = ½ m vf2 - ½ m vi2
Lavoro delle forze di attrito produce una diminuzione della velocità
Sistemi non isolati
Altre forme di energia
Metodi per trasferire energia
Vedi capitolo 6.6
Lavoro ed energia
potenza
Il lavoro W misura il trasferimento di energia
W = ³J Fxds =³ab Ft ds
Quanto rapidamente avviene il trasferimento di energia?
Si definisce una nuova grandezza: potenza
<P>= W/'t
kWh=
103
W 3.6
103s
3.6
106
J
P= dW/dt =Fxds/dt= Fx v = FTv
*
in generale dipende dal percorso J
manifestazione dell’interazione tra sistema e ambiente, scambio
Teorema dell’energia cinetica
P= dW/dt= dE/dt
dimensioni: [M][L][T]-2[T]= [M][L][T]-3
N m/s= kg m2s-3-= J/s=W
1 hp=746 W
J
Wab= ³J Fxds =½ m vb2-½ m va2=Ek,b- Ek,a= 'Ek
Lavoro come trasferimento di energia
l’energia è posseduta dal sistema la variazione di energia è un effetto
misurabile dell’interazione
*N.B per il calcolo occorre conoscere il diagramma di corpo libero conoscere le
componenti delle forze e calcolare l’integrale, anche graficamente
Lavoro di particolari forze
Esempio
•non dipende dal percorso J
Il sistema per lanciare la pallina di un flipper è costituito da una molla di costante
elastica 1.2 N/cm inclinata di 10.0° rispetto all’orizzontale. Se la molla è
inizialmente compressa di 5.00 cm, determinare la velocità con cui viene lanciata l
pallina quando lancia il pistoncino.
•dipende solo da posizione iniziale e finale
T. EK
Forza peso
Wab = mgya-mgyb
F(a)–F(b) = Ua – Ub
W='EK
½ kx2 – mgs sen 10.0 = ½ (vf2 -v02 )
v= (2/m [½ kx2 – mgs sen 10.0 ])1/2
Forza elastica Wab=½ k xi2-½ k xf2 = Ua - Ub
v=(2/0.100 kg[½ (120 N/m)(5.00 10-2 m)2–(0.100 kg)(9.8 m/s2)(5.00 10-2 m) sen 10.0 ])1/2
v=1.68 m/s
Forze conservative
Energia potenziale
a) il lavoro svolto dalla forza su una particella che si muove tra due punti è
indipendente dalla traiettoria seguita dalla particella tra i due punti
³abJ1 Fxds =³abJ2 Fxds =³abJ3 Fxds
b) il lavoro svolto dalla forza su una particella è esprimibile come
differenza dei valori che una funzione assume in a e in b, tale funzione si
chiama energia potenziale e la sua espressione dipende dalla forza cui si
riferisce
-Non
esiste una formula generale per l’energia
potenziale
la sua espressione dipende dalla forza cui si riferisce
Forza peso
mgy + c
Forza elastica
½ k x2 + c
³abJ Fxds= Ua - Ub = -'U
- come è possibile calcolare 'U ?
calcolando il lavoro svolto
c) il lavoro svolto dalla forza su una particella che si muove in un percorso
'U esprime la capacità di fornire lavoro
chiuso è zero
Se U aumenta bisogna fornire lavoro
³aa Fxds=0
Energia potenziale
Conservazione dell’energia meccanica
-Non esiste una formula generale per l’energia potenziale,
ma la sua espressione dipende dalla forza cui si riferisce
Forza peso
mgy + c
Forza elastica
½ k x2 + c
- è possibile calcolare 'U calcolando il lavoro svolto
'U esprime la capacità di fornire lavoro Se U aumenta bisogna
fornire lavoro
Energia potenziale (J)
Wab = Ua - Ub = -'U
da una forza conservativa non si può ricavare lavoro se il percorso è
chiuso, se il processo è ciclico
la funzione U è definita a meno di una costante additiva, ininfluente nel
calcolo del lavoro, (legato al sistema di riferimento)
Wab = Ek,b - Ek,a
tutte le forze
Wab = Ua - Ub
forze conservative
Ek,b - Ek,a = Ua - Ub
Ek,a + Ua = Ek,b + Ub
Ek+ U = E = cost
E= energia meccanica
Ek si trasforma in U mediante lavoro
Conservazione dell’energia meccanica
E= energia meccanica
Conservazione dell’energia meccanica
Cosa significa?
Esiste un numero (E) che si può
calcolare in un dato momento e che,
misurato in un momento successivo,
anche dopo cambiamenti, rimane lo
stesso
Quando si applica?
quando un sistema è soggetto solo a
forze conservative
Che implicazioni ha?
le energie possono trasformarsi
una nell’altra, ma la loro somma
resta costante
Quale seguito?
Possibilità di determinazione di
altre leggi (forme di energia)
Ek, + U = E = cost
Relazione valida solo quando in un sistema agiscono
forze conservative,
in presenza di forze non conservative, dissipative,
l’energia meccanica non si conserva,
la sua variazione = al lavoro delle forze non
conservative
Conservazione dell’energia meccanica
I fisici hanno un debole per i principi di conservazione, vuoi per la loro
intrinseca eleganza e semplicità, vuoi perché spesso semplificano
sorprendentemente i calcoli.
Quali conseguenze pratiche?
Quali conseguenze teoriche?
Esempi
Esempio 1
Punto materiale di massa m in caduta libera da un’altezza h. Determinare
la sua velocità ad un’altezza qualsiasi (trascurare la resistenza dell’aria).
1. deteminazione con le leggi del moto uniformemente accelerato
2. Con conservazione dell’energia: corpo soggetto solo a forza peso
forme di energia
Ep = mgy
posizione iniziale A Ep,A = mgh
posizione finale B
Ep,B = mgy
mgh+0= mgy+ ½ mvB2
A terra mgh+0= 0+ ½ mvB2
Ek= ½ mv2
Ek= 0
Ek= ½ mvB2
vB= (2g(h-y))1/2
vB= (2gh)1/2
h
Esempio 2
Punto materiale di massa m può muoversi lungo un piano inclinato, parte da fermo
da un’altezza h. Determinare la sua velocità quando arriva a terra (trascurare la
forza d’attrito).
1. deteminazione con le leggi del moto uniformemente accelerato
2. Con conservazione dell’energia: corpo soggetto solo a forza peso
Ek= ½ mv2
forme di energia Ep = mgy
posizione iniziale A Ep,A = mgh
EkA= 0
posizione finale B
Ep,B = 0
EkB= ½ mvB2
mvB2
Esempio 3
Punto materiale di massa m può muoversi lungo una superficie curva
qualsiasi (scivolo) inclinato, parte da fermo da un’altezza h. Determinare
la sua velocità quando arriva a terra (trascurare la forza d’attrito).
2. Con conservazione dell’energia: corpo soggetto solo a forza peso
forme di energia
(2gh)1/2
A terra mgh+0= 0 + ½
vB=
Arriva a terra con la stessa velocità del corpo in caduta libera, cosa cambia? Tempo
t che impiega. t’= (2h/g)1/2 t= [(2 h/sen T)(g sen T)]1/2
A che altezza arriverà?
posizione iniziale B Ep,B = 0
posizione finale C
Ep,C = mgh’
EkB= ½ mvB2
Ek= 0
Ep = mgy
posizione iniziale A Ep,A = mgh
posizione finale B
Ep,B = 0
A terra mgh+0= 0 + ½ mvB2
Ek= ½ mv2
EkA= 0
EkB= ½ mvB2
vB= (2gh)1/2
Velocità finale dipende solo dall’altezza della caduta
mgh’+0= 0 + ½ mvB2
Esempio 4
Esempio 5
Punto materiale di massa m e velocità v va contro una molla di costante
elastica k. Di quanto si accorcia la molla? (trascurare la forza d’attrito).
forme di energia Ep = ½ k x2
Ek= ½ mv2
Moto del pendolo
Forze agenti:
Peso,forza conservativa e tensione del filo che non compie lavoro perché
perpendicolare alla traiettoria
posizione iniziale A
Ep,A = 0
EkA= ½ mvB2
Riferimento per energia potenziale: punto più basso
posizione finale B
Ep,B = ½ k x2
EkB= 0
alto
Ep = mgy= mgL(1-cosD) EkA= 0
½ mvB2 = ½ k x2
basso
Ep,B = 0
x= (m/k)1/2 vB
generico Ep = mgy= mgL(1-cosD) Ekg= ½ mvB2
V= (2gl (cosD –cosD))1/2
EkB= ½ mvB2
Presenza di forze di attrito: non
conservazione dell’energia
Lavoro ed energia
W = ³J Fxds =³ab Ft ds
W= Wc + Wnc= Ekb-Eka
(Ek, + U)b - (Ek, + U)a = Wnc
*
in generale dipende dal percorso J
Esempio 6
manifestazione dell’interazione tra sistema e ambiente, scambio
Punto materiale di massa m può muoversi lungo un piano inclinato con
coefficiente di attrito P, parte da fermo da un’altezza h. Determinare la sua
velocità quando arriva a terra
Non si conserva l’energia:
posizione iniziale A
Ep,A = mgh
EkA= 0
posizione finale B
J
Ep,B = 0
EkB= ½ mvB2
Lavoro della forza di attrito Wnc = -P N s= -P mg cos T (h/senT)
½ mvB2 -mgh= -P mg (h/tgT)
vB= (2gh(1-P/tgT))1/2
Conservazione dell’energia meccanica
E= energia meccanica
Ek, + U = E = cost
Relazione valida solo quando in un sistema agiscono
forze conservative,
in presenza di forze non conservative, dissipative,
l’energia meccanica non si conserva,
la sua variazione = al lavoro delle forze non
conservative
Teorema dell’energia cinetica
Wab= ³J Fxds =½ m vb2-½ m va2=Ek,b- Ek,a= 'Ek
Lavoro come trasferimento di energia
l’energia è posseduta dal sistema la variazione di energia è un effetto
misurabile dell’interazione
*N.B per il calcolo occorre conoscere il diagramma di corpo libero conoscere le
componenti delle forze e calcolare l’integrale, anche graficamente
Presenza di forze di attrito: non
conservazione dell’energia
W= Wc + Wnc= Ekb-Eka
(Ek, + U)b - (Ek, + U)a = Wnc
Esempio 6
Punto materiale di massa m può muoversi lungo un piano inclinato con
coefficiente di attrito P, parte da fermo da un’altezza h. Determinare la sua
velocità quando arriva a terra
Non si conserva l’energia:
posizione iniziale A
Ep,A = mgh
EkA= 0
posizione finale B
Ep,B = 0
EkB= ½ mvB2
Lavoro della forza di attrito Wnc = -P N s= -P mg cos T (h/senT)
½ mvB2 -mgh= -P mg (h/tgT)
vB= (2gh(1-P/tgT))1/2
Relazione tra energia potenziale e forza
Per forze conservative E= Ep+Ek = cost
dE
dEK dU
= 0 = +
dt
dt
dt
dEK
= dt
dE/dt=0
dU
dt
dE d
= (1/2 mv2) = mv (dv/dt) = mv a= Fx v
dt
dt
dU dU dx
= = (dU/dx) v
dt
dx dt
Relazione tra energia potenziale e forza
Fx v = - (dU/dx) v
Fx = - (dU/dx)
tre dimensioni
dW = Fxds = Fx dx + Fy dy + Fz dz = -dU
Fx = - (dU/dx)
Fy = - (dU/dy)
Fz = -(dU/dz)
F = - grad U = - U
Fx v = - (dU/dx) v
Fx = - (dU/dx)
Diagrammi energia: equilibrio
z
Diagramma di energia
Fx=-(dU/dx)
Forza, lavoro impulso
z
U(x)
Es Forza elastica
Fx=-(dU/dx)=-d(1/2 kx2)/dx=-kx
Forza F = dp/dt
F = m a (N)
Lavoro J
Wab = ³abJ Fxds
Energia J
conservazione quantità di moto
o momento
1/2mv2
cinetica per tutte F
potenziale (conservative)
In un sistema isolato la quantità
di moto rimane costante
Impulso
conservazione energia
dp = F dt teorema
in un sistema interagente solo mediante
forze conservative l’energia meccanica
rimane costante
³ti tf F dt = pf - pi = 'p
F = m a (N)
Quantità di moto
p=mv
Forza F = dp/dt
F12+F21 = 0
dp1/dt + dp2/dt = 0
p1 + p2 = cost
Lavoro J
Wab = ³abJ Fxds
Energia J
cinetica teorema per tutte F
Wab=³abJ Fxds='EK
potenziale (conservative)
Wab = Ua - Ub = -'U
conservazione energia
in un sistema interagente solo
mediante forze conservative
l’energia meccanica rimane
costante
Ek, + U = E = cost
Quantità di moto e sistemi isolati
conservazione quantità di moto
o momento
In un sistema isolato la quantità
di moto rimane costante
p=mv
F = ma= m dv/dt = dp/dt
6i FiE = 0 ptot = cost
dp1/dt + dp2/dt = 0
Impulso
dp = F dt teorema
³ti tf F dt = pf - pi = 'p
J= ³ti tf F dt = 'p
<F> = 1/ 't ³ti tf F dt
'p = J = 't <F>
F12+F21 = 0
p1 + p2 = cost
6pi = cost
6pixi = 6pixf =cost
6piyi = 6piyf =cost
6pizi = 6pizf =cost
Esempi rinculo del fucile
pattinatore
decadimento caone
6Pi= 0=p++p-
FF==ma=
ma=m
mdv/dt
dv/dt==dp/dt
dp/dt
Impulso
•
URTI
si definisce impulso di una forza che agisce
su un punto in un tempo compreso tra ti e tf
I= ³ti tf F dt
teorema dell’impulso
dp = F dt
³ti tf F dt = pf - pi = 'p
kg m s-1
I= ³ti tf F dt = 'p
è conveniente definire una forza media
tf F
<F> = 1/ 't ³ti
dt
I= 't <F> = 'p
• approssimazione impulsiva: una delle forze agenti agisce per
un breve intervallo di tempo, ma è molto più intensa e produce
una variazione di momento pi e pf momento prima e dopo
l’intervento della forza
Sistema isolato
URTI
2 punti
interagiscono
mediante una forza
impulsiva
Approssimazione
forza impulsiva molto più
intensa delle forze esterne
sistema isolato
Si conserva la quantità di moto
totale per ogni tipo di urto
1) Urto elastico
'p1 = 'p2
si conservano: - quantità di moto
- energia (cinetica)
(Ep=0)
urto anelastico
• m1v1i + m2v2i = m1v1f + m2v2f
• urto perfettamente anelastico
m1v1i + m2v2i = (m1 + m2) vf
2) Urto anelastico
vf = (m1v1i + m2v2i) / (m1 + m2)
si conserva: - quantità di moto
non si conserva energia cinetica
(deformazione di corpi o
variazione massa, temperatura)
3) urto perfettamente anelastico
quando i corpi rimangono uniti
Urto elastico
Sistemi di punti
corpi
pianeti
elettroni nell’atomo
n discreto e infinito atomi in un gas
(molto grande)
elettroni nel metallo
n continuo corpo
rigido (distanze invariabili)
elastico
n discreto e finito
sistema (n punti)
m1v1i + m2v2i = m1v1f + m2v2f
½ m1v21i + ½ m2v22i =½ m1v21f + ½ m2v22f
ambiente
moto in una sola direzione: si risolve il sistema
v1f=[(m1- m2)/(m1+m2)]v1i+ [2m2/ (m1 + m2)] v2i
- Forze su un punto i del sistema
v2f=[2m1/(m1 + m2)]v1i+[(m2 - m1)/(m1+m2)] v2i
Fi = Fie + Fii
Fie esterna
Fii
Urti in più dimensioni: impostare le equazioni delle
componenti, per un sistema nel piano 3 equazioni, nello
spazio 4 equazioni
6i Fii=
interna
0 III legge Newton
F12
P1
P2
F21
F12=- F21
Forze interne
Sistemi di punti: descrizione sistema
ciascun punto Pi
posizione
velocità
accelerazione
quantità di moto
energia cinetica
sistema (n punti)
ri
vi
ai = Fi / mi
pi = mi vi
Eki = ½ mi v2i
sistema complessivo
quantità di moto totale
P = 6i pi = 6i mi vi
energia cinetica totale
Ek = 6i Eki = 6i ½ mi v2i
Sistemi di punti: descrizione sistema
grandezze caratteristiche di ogni punto Pi
posizione
velocità
accelerazione
quantità di moto
energia cinetica
Sistemi di punti
ri
vi
ai = Fi / mi
pi = mi vi
Eki = ½ mi v2i
grandezze del sistema complessivo
quantità di moto totale
P = 6i pi = 6i mi vi
energia cinetica totale
Ek = 6i Eki = 6i ½ mi v2i
corpi
pianeti
elettroni nell’atomo
n discreto e infinito atomi in un gas
(molto grande)
elettroni nel metallo
n continuo corpo
rigido (distanze invariabili)
elastico
F12
n discreto e finito
ambiente
- Forze su un punto i del sistema
Fi = Fie + Fii
P1
Fie esterna
Fii
P2
F12=- F21
Forze interne
F21
interna
6i Fii= 0 III legge Newton
Centro di massa (CM)
sistema composto da 2 punti
xcm = (m1 x1 + m2 x2) / (m1 + m2)
• es 1: atomo di ossigeno O-O
8 uma (1.66 10-27 kg) 1.2 10-10 m
La posizione del CM rispetto ai punti materiali non
dipende dal sistema di riferimento
•es 2: CO 6 uma 8 uma (1.66 10-27 kg) 1.13 10-10 m
•0,48
0.64
•es 3: 3 corpi con la medesima massa
disposti ai vertici di un triangolo equilatero
Centro di massa (CM)
•es 3: 3 corpi con la medesima massa
disposti ai vertici di un triangolo equilatero
sistema costituito da n punti
rcm = 6i mi ri / M
rcm = xcmi + ycmj + zcmk
xcm = 6i mi xi / M
ycm = 6i mi yi / M
zcm = 6i mi zi / M
Si può calcolare anche per step successivi
Centro di massa (CM)
•es sbarra
m xcm=³ x dm =³ x O dx =O³³ x dx =
(O x2]xixf= O l2/2
In un corpo simmetrico e omogeneo il CM si trova in
un asse di simmetria e può essere un punto non
appartenente al corpo (cerchione di una ruota)
Per calcolare il CM di un corpo composto si suppone
che la massa di ciascun componente sia concentrata nel
rispettivo centro di massa
Centro di massa (CM)
per un sistema continuo
(n= con distribuzione distribuita rcm= 6imiri/M)
rcm = (³ r dm) / M
occorre conoscere la distribuzione spaziale
della massa del corpo
U = dm/dV
dm = U dV
³dm = ³v U dV
integrale lineare o di superficie se corpo lineare o piano
rcm = (³ r U dV ) / M
(O x2]xixf= O l2/2
Moto di un sistema di punti
vcm = drcm /dt= 1/M 6i (mi dri / dt) = 6i mivi / M
Mvcm=6i mivi=6i pi = ptot
momento CM=momento sistema
acm= dvcm/dt= 1/M 6i (mi dvi /dt) = 6i miai /M
M acm= 6i miai = 6i Fi = 6i FiE = dptot /dt
6i FiE = M acm = dptot /dt
Moto di un sistema di punti
Mvcm=6i mivi=6i pi = ptot
momento CM=momento sistema
M acm = 6i miai = 6i Fi = 6i FiE = dptot /dt
6i FiE = M acm = dptot /dt
Sistema isolato
6i FiE = 0 dptot /dt = M acm=0
Si conservano ptot e vcm
rcm vcm acm proprietà medie del sistema (media pesata)
e non dei singoli punti
leggi del CM leggi del punto materiale
Esempi: nuotatore-zattera, decadimento radioattivo, pattinatore, bomba
Sistema di riferimento del CM
Origine CM
assi µµ assi laboratorio
sistema non inerziale (eccezione sistemi isolati)
r = OO’ + r’ = rCM + r’
Moto di un sistema di punti
moto traslazionale
del cm
+
moto rotazionale
attorno al cm
moto traslazionale
del cm
Sistema di riferimento
del CM
OrigineCM
assi µµ assi laboratorio
sistema non inerziale
(eccezione sistemi isolati)
O’ posizione del cm
v = vCM + v’
r’CM = 0 = 6 mi r’i
r = OO’ + r’ = rCM + r’
v = vCM + v’
r’CM = 0 = 6 mi r’i
F12
Energia cinetica
P1
P2
Energia cinetica
F21
per un punto Pi
dWi =Fi x dri= FiExdri + FiIxdri =dWiE +dWiI
W = WE + WI = Ekb - Eka = 'Ek
Totale
* nb il lavoro delle forze interne non è nullo WI z 0
es 2 punti
F12 x dr1+F21 x dr2 = F12xd(r1-r2)
Nel sistema isolato l’energia si conserva solo
se le forze interne sono conservative
Ek = 6i Eki = 6i ½ mi v2i
Energia cinetica: rotazione*
Cosa succede se un sistema di punti ruotano
attorno ad un punto?
Ek = 6i Eki = 6i ½ mi v2i = ½ 6i mi r2i Zi2
Ek = 6i Eki = 6i ½ mi v2i
cosa succede in un particolare sistema di riferimento?
Ek=6i ½mi(vCM + vi’)2=½M v2CM + 6i½mi v’2i+ 6i mi v’i vCM 0
Ek = ½ M v2CM+ E’k = ECM + E’k
Teorema di Koening: non è sufficiente conoscere il moto del
centro di massa per conoscere l’energia del sistema, utile perché si
possono sommare le energie
punti fermi rispetto a CM Ek = E’CM
Sistemi di punti
sistema (n punti)
ambiente
rotazione di un corpo rigido attorno ad un asse
fisso z
Z = cost per tutti i punti vi = ri Z
Ek = 6i Eki = 6i ½ mi v2i = 6i ½ mi r2i Z2
= ½ (6i mi r2i) Z2
Ek = ½ I Z 2
corpi
pianeti
elettroni nell’atomo
n discreto e infinito atomi in un gas
(molto grande)
elettroni nel metallo
n continuo corpo
rigido (distanze invariabili)
elastico
F12
n discreto e finito
- Forze su un punto i del sistema
Fi = Fie + Fii
Fie esterna
Fii interna
6i Fii= 0 III legge Newton
P1
P2
F21
F12=- F21
Forze interne
Sistemi di punti: descrizione sistema
grandezze caratteristiche di ogni punto Pi
posizione
ri
velocità
vi
accelerazione
ai = Fi / mi
quantità di moto
pi = mi vi
energia cinetica
Eki = ½ mi v2i
grandezze del sistema
quantità di moto totale
P = 6i pi = 6i mi vi
energia cinetica totale
Ek = 6i Eki = 6i ½ mi v2i
Centro di massa
rcm = xcmi + ycmj + zcmk sistemi di punti
rcm = (³ r U dV ) / M
corpo
Moto del centro di massa di un sistema
- Forze sul sistema
6Fi = 6Fie + 6Fii = 6Fie
F12
F1
cm
P2
0
F21
Moto di un sistema di punti
Centro di massa
rcm = 6i mi ri / M
rcm = (³ r dm) / M
vcm = 6i pi/M
Sistema isolato
acm=(6i miai)/M=6i Fi /M=6i FiE /M
6i FiE = 0
6i FiE = M acm = dptot /dt
Risultante delle forze esterne cambia
il moto del centro di massa
dptot /dt = M acm = 0
Si conservano ptot e vcm
Moto di un sistema di punti
moto traslazionale
del cm
+
moto rotazionale
attorno al cm
moto traslazionale
del cm
Sistema di riferimento
del CM
OrigineCM
assi µµ assi laboratorio
sistema non inerziale
(eccezione sistemi isolati)
O’ posizione del cm
r = OO’ + r’ = rCM + r’
v = vCM + v’
r’CM = 0 = 6 mi r’i
F12
Sistema di riferimento del CM
Energia cinetica
P1
P2
F21
per un punto Pi
dWi =Fi x dri= FiExdri + FiIxdri =dWiE +dWiI
Origine CM
assi µµ assi laboratorio
sistema non inerziale (eccezione sistemi isolati)
r = OO’ + r’ = rCM + r’
W = WE + WI = Ekb - Eka = 'Ek
Totale
* nb il lavoro delle forze interne non è nullo WI z 0
v = vCM + v’
es 2 punti
r’CM = 0 = 6 mi r’i
Nel sistema isolato l’energia si conserva solo
se le forze interne sono conservative
F12 x dr1+F21 x dr2 = F12xd(r1-r2)
Ek = 6i Eki = 6i ½ mi v2i
Energia cinetica
Ek = 6i Eki = 6i ½ mi v2i
cosa succede in un particolare sistema di riferimento?
Ek=6i ½mi(vCM + vi’)2=½M v2CM + 6i½mi v’2i+ 6i mi v’i vCM 0
Ek = ½ M v2CM+ E’k = ECM + E’k
Teorema di Koening: non è sufficiente conoscere il moto del
centro di massa per conoscere l’energia del sistema, utile perché si
possono sommare le energie
punti fermi rispetto a CM Ek = E’CM
Energia cinetica: rotazione*
Cosa succede se un sistema di punti ruotano
attorno ad un punto?
Ek = 6i Eki = 6i ½ mi v2i = ½ 6i mi r2i Zi2
rotazione di un corpo rigido attorno ad un asse
fisso z
Z = cost per tutti i punti vi = ri Z
Ek = 6i Eki = 6i ½ mi v2i = 6i ½ mi r2i Z2
= ½ (6i mi r2i) Z2
Ek = ½ I Z 2
rotazioni
Energia cinetica: rotazione
Momento d’inerzia
angolo
T(t) = s(t)/R
velocità angolare
Z= d- /dt =(1/R) ds/dt =v/R rad/s
accelerazione angolare
D=dZ/dt=d2T/dt2 =1/R dv/dt= at/R
I = 6i mi r2i
rotazione
kg m2 dipende da M e asse di
I = ³ r2 dm
corpo rigido tabella
Iz = ³ (x2+y2) U dV
Moto uniforme » v» e Z costanti
s(t) =s0 + vt
-(t) =-0 + Zt
Moto circolare uniformemente accelerato
T(t)= T0 + Z dt + ½ D t2
Principi di conservazione per sistemi
QUANTITA’ DI MOTO
se un è sistema isolato
6i FiE = 0 dptot /dt = M acm = 0
Si conservano ptot e vcm
ENERGIA MECCANICA
se un sistema è soggetto solo a forze conservative (interne ed
esterne) l’energia meccanica rimane costante
Ek+U = E = cost
Momento di una forza rispetto ad un punto
•Forza applicata in un punto P
Una ruota con momento d’inerzia di 0.50 kg·m2 ruota con una
velocità angolare di 40 rad/s quando si spegne il motore. A causa
del momento delle forze dissipative la ruota si ferma. Il lavoro
fatto dal momento delle forze dissipative è in J
A. 20
•P è punto diverso dal centro di massa
•r
distanza di P da CM o da punto fisso
braccio della forza
W = r F sinT= rFt = rAF modulo
direzione e verso
C. 400
D. – 400
Wat = 'EK = 0- ½ I Z2 =- 16 /4 * 102 = -400 J
W su sistema o corpo rigido rotazione
Perché il corpo sia fermo: 6Fi = 6Fie=0 fermo CM
6W= 0 fermi i punti rispetto CM
Momento di una forza rispetto ad
un punto
Lavoro ed energia
Più forze su un punto
dW=F x ds = (F sen) r dT
M=rxR
M = 6iMi = 6iri x Ri
=6iri x RiI +6iri x RiE=6iri x FiE=6iri x miai
Se il moto è circolare di raggio R il modulo
Mi = ri Ft i = (mi at) ri = mi ri Di ri =mi ri2 D i
Modello di corpo rigido
6iMi=6iriFt i=6i(mi at)ri=6i(mi ri D)ri=(6i mi ri2)D = ID
Equilibrio
dW= W dT= I D dT= I (dZdt) dT
I (dZdT) (dTdt) dT = I Z dZ
³if dW= ³if W
dT = ³if I Z dZ =
= ½ I Zf ½ I Zi F
r
W=rxF
B. - 20
Sistema di punti
M
P
Momento della quantità di moto o
momento angolare
Punto i che si muove con velocità vi
rispetto ad un punto fisso O
Momento della quantità di moto o
momento angolare
z
corpo rigido che ruota attorno ad un asse di
simmetria
quantità di moto pi=m vi
momento della quantità di moto
il moto è circolare di raggio R attorno all’asse
Z
Li = rix pi = ri x mi vi
Li = rix pi = ri x mi vi = mi ri Ri Zi
L = r mv sinT
Liz = Lz mi ri senTi Ri Zi =mi Ri2 Zi
rAL, vAL
Sistema di particelle
Lz = 6iLiz = ( 6imi Ri2) Z I Z
L= 6iLi =6i ri x pi = 6i ri x mi vi
L=I Z
Momento angolare e
Momento di una forza
Momento angolare e
Momento di una forza
L = rx p = r x mv
dL/dt=(dr/dt)x p + r x (d (mv)/dt)= v x mv+r x F= M
dL/dt= M
0
M=0 dL/dt= 0 L costante
F=0
o r~~F
Conservazione del momento angolare
Il momento angolare di un sistema di conserva quando si
annulla il momento delle forze
esempi ballerina, forze centrali
corpo rigido
L=IZ
dL/dt= I dZ /dt= ID
forze centrali F (r) ur
M= r x F (r) ur = 0
L=cost
L= r x mv
dA/dt=1/2m _ r x v_
vi
ri
L
O
Equazioni dinamica
Moto traslatorio
Moto rotatorio
attorno asse fisso
Energia cinetica
Ek = ½ M v2
Ek = ½ I Z2
Seconda legge di
Newton
Seconda legge di
Newton
Equilibrio
6 F=ma
6 M=ID
6 F=dp/dt
6 M= dL/dt
6 Fi=0
6 Mi=0
p=mv
L=IZ
pi=pf
Li=Lf
Momento e momento
angolare
Principio di
conservazione
8QGLVFRUXRWDDWWRUQRDGXQDVVHSDVVDQWHSHULOVXRFHQWUR
XQFDPELRQHOODYHORFLW¢ GLDQJRODUHª SURGRWWDGD
$XQDIRU]D
%PRPHQWRDQJRODUH
&PRPHQWRGLXQDIRU]D
'PRPHQWRGಬLQHU]LD
3HUFK«ಹ
Le legge della gravitazione universale
8QDSDOOLQDª DSSRJJLDWDVXOERUGRGLXQGLVFRFKHVLPXRYHFRQ
YHORFLW¢ DQJRODUHFRVWDQWHZDGXQFHUWRSXQWRODSDOOLQDVL
PXRYHYHUVRLOFHQWURGHOGLVFRHVLIHUPDDPHW¢ GHOUDJJLR
/DYHORFLW¢ DQJRODUHZGHOGLVFRLQTXHVWRPRPHQWR
$
ª GLPLQXLWD
%
ª DXPHQWDWD
C.
UHVWDLQYDULDWD
3HUFK« 6LFRQVHUYDLOPRPHQWRDQJRODUH
,GP5 Z ,GP5 Z
'LPLQXLVFHLOPRPHQWRGಬLQHU]LDTXLQGLDXPHQWDODYHORFLW¢
DQJRODUH
Conoscenze ai tempi di Newton (1642-1727)
Teoria
Copernico
Misure sperimentali
Brahe
Leggi cinematiche
Keplero
Leggi di Keplero
II legge di Keplero e momento angolare
1. I pianeti percorrono orbite ellittiche
intorno al sole che occupa uno dei due
fuochi
1. approssimazione
orbite circolari
terra b/a = 0.99986
2. La velocità areale con cui un raggio
vettore che unisce il sole ad un
pianeta descrive l’orbita è costante
3. Il quadrato del periodo di rivoluzione
di un pianeta è proporzionale alla
distanza di un semiasse al cubo
T2 = K r3
II legge di Keplero e momento angolare
ipotesi:
F = F(r) ur
2. Definizione:
velocità areale
dA = ½ r dT r = ½ r2 dT
dr
dA/dt = ½ r2 dTdt
r
3. II legge di Keplero
dA/dt vdTdt = cost (uniforme)
II legge di Keplero e momento angolare
forza centrale
F(r)<0 attrattiva
momento di una forza centrale
M = r x F = r x F(r) ur = 0 r~~F
M =dL/dt
=0
L= cost
Il momento angolare si conserva
se sono costanti direzione e verso
moto dei pianeti è piano, in unico verso
M =dL/dt = 0
L= cost
si conserva anche il modulo del momento angolare
L = rxp = r x m v
L = r m r Z = m r2 d-/dt
ricordando l’espressione dell’area
dA/dt = L/2m = cost
II legge Keplero
Nel 1798 Cavendish riuscì a misurare la costante di attrazione gravitazionale
grazie ad un dispositivo chiamato bilancia a torsione
Determinazione della legge di gravitazione
Forza agente sul pianeta: centripeta
F=mv2/r=m
F= (4
S2/
Z2r=m
kr3)
(2
mr = (4
direzione ur
S/T)2
r
III legge Keplero T2=kr3
S2/
m/r2
proporzionale m e
k)
1/r2
Per determinare la costante
sole oterra
terraosole
Fts = (4 S2/ kt) mt/r2
Fst = (4 S2/ ks) ms/r2
III legge newton
Fts = -Fst
G= 4
S2/
ks mt = kt ms
ks mt = 4S2/ kt ms
G =6.672 x 10-11 N m2/ kg2
Misura bilancia torsione
Questa apparecchiatura è costituita da due piccole sfere
di piombo, fissate ad una asta di 2 m sospesa per il
punto medio a un filo di quarzo sul quale era
posizionato uno specchietto.
Vicino alle sferette sono posizionate due grosse sfere.
La forza gravitazionale esercitata dalle sfere
grosse sulle piccole fa ruotare il dispositivo mobile di un
angolo proporzionale alla forza.
Dalla misura dell’ angolo di torsione si ricava il valore
della forza gravitazionale. La sensibilità è aumentata
mediante la riflessione di un raggio luminoso su una
scala di graduata in cui viene letto
l’angolo di torsione.
Cavendish ha così potuto determinare il valore di
costante di attrazione gravitazionale, che nel Sistema
Internazionale vale G= 6,67 10 -11.
F= - G ms mt/r2 ur
Equivalenza forza peso- forza gravitazionale
Hp: La forza gravitazionale esercitata da una distribuzione di
massa a simmetria sferica è la stessa del caso in cui tutta la massa
della sfera fosse concentrata nel suo centro (Teorema di Gauss)
F= G m mt/rt2ur
F= mg
Hp: massa inerziale = massa gravitazionale
Verifica dipendenza da 1/R2
al /g = (rt / rl)2
al = (rt / rl)2 g= 2.70 10-3 ms-2
al = v2/rl = (2S rl/T)2 /rl = 2.70 10-3 ms-2
g= G mt/rt2
Come fare senza conoscere G e MT?
analisi dell’orbita lunare
Flt= G ml mt/rl2 = ml Zl2 rl
G mt = Zl2 rl3
Equivalenza forza peso- forza gravitazionale
si ricava g dati sperimentali in accordo
peso della terra
mt = g rt2/ G
Campo Gravitazionale
g sulla terra
1. M = r V g dipende dalla densità
F12 = (- G m2 /r2 u12) m1
2. dipende dalla forma della terra (polo)
F21 = (- G m1 /r2 u21) m2
3. dipende dall’altezza
4. dipende dalla rotazione
G1= F21/m2= - G m1/r2 ur
F21 = G1 m2
G2= F12/m1= - G m2/r2 ur
F12 = G2 m1
Puntiforme o simmetria sferica
Principio di sovrapposizione
mag- mg = m
Z2
r = 0.034
Fi = 6j Fij
Gi = 6j Gij
Campo Gravitazionale
Energia potenziale gravitazionale
Puntiforme o simmetria sferica
d W = Fxds
Principio di sovrapposizione
Forza gravitazionale è conservativa?
Fi = 6j Fij
W = ³ab dW = ³rarb –G m1m2/ r2 urxd s =
Gi = 6j Gij
=³rarb –G m1m2/r2d r
= – G m1m2/ ra -(– G m1m2/ rb ) = Epa – Epb
'Ep = – G m1m2/ r |ab
Energia potenziale gravitazionale
Ep = – G m1m2/ r
E’ necessario determinare un punto di riferimento
Ep= 0 r= f
Potenziale
Energia potenziale gravitazionale
Forza - campo
G= F /mp
En pot - potenziale
V1= Ep /mp
Relazione tra F gravitazionale ed Ep
V1= Ep /m2
F = - grad Ep
Relazione tra F gravitazionale ed Ep
G = - grad V
F = - d Ep/ dr
Superfici equipotenziali
F = - grad Ep
G = - grad V
Energia e moto di satelliti
Energia e moto di satelliti
E= EK + EP
E = ½ m v2 + -G Mm/r
E = cost
Ep = – G m1m2/ r
E = ½ m v2 + -G Mm/r
Velocità di fuga
che velocità deve avere un corpo per fuggire all’orbita?
corpo legato E<0
Conservazione dell’energia
GMm/r2 = mv2/r
E = ½ m v2 + -G Mm/R
E = - G Mm/2r
½ m v2 -G Mm/R= ½ m v02
½ m v2 + -G Mm/R= 0 v2= 2GM/R
½ m v2 = GMm/2r
Atomo di idrogeno
Spettri di emissione e
assorbimento
Onde elettromagnetiche
c= OQ
Atomo di Bohr
1.
elettrone si muove in orbite circolari: quale interazione?
2.
3.
solo alcune orbite sono stabili E=cost
l’elettrone può “saltare” da un livello energetico
ad un altro (quantizzazione)
Ef-Ei=hQ
La dimensione delle orbite è legata al
momento angolare
(quantizzazione)
mevr=nh/2S
4.
Non conservazione dell’energia meccanica
Lavoro [J]
interazione sistema –ambiente
Wab = ³abJ Fxds
Energia [J]
grandezza caratteristica di un sistema
cinetica
potenziale solo F conservative
variazione di energia è un effetto
misurabile dell’interazione
conservazione energia
In un sistema interagente solo
mediante
forze conservative l’energia
meccanica rimane costante
Ek, + U = E = cost
Cosa accade quando non si conserva l’energia meccanica?
Trasformazione dell’energia meccanica in altre forme di energia
energia interna (ordine-disordine)
Ad un sistema può essere aggiunta energia sia come lavoro che come calore
1. Sistema isolato
Lavoro della forza peso
2.Sistema non
isolato
Sorgente di temperatura
mgh
Energia cinetica delle pale
½ IZ2
Lavoro delle forze
dissipative
calore
Aumento della temperatura
Variazione di Energia interna Ein(c,T,p,V..)
I Principio termodinamica
conservazione energia
1.
Wad =- 'U = Uin-Ufin W>0 fatto dal sistema
2.
Q = 'U
Q>0 ceduto al sistema
Attenzione!!
'U
= Q–W
funzione di stato
Sistema : porzione del mondo
costituita da una o più parti,
sistema continuo (NA atomi)
•Aperto
•Chiuso
•Isolato
dipendono dal
percorso
f(p,V,T,comp) mc'T
(sistema idrodinamico)
W [J]
Convenzione segni
Sistema termodinamico
Ambiente: il resto del mondo con
cui il sistema può interagire
Quale descrizione?
mediante quantità utili a studiare:
•trasformazioni del sistema (reversibili,
irreversibili)
• interazioni con l’ambiente
• sistema in equilibrio
p'V
Q [cal]
1 cal = 4186.8 J
dQ = dU + dW
Equilibrio termodinamico
Sistema termodinamico
meccanico
chimico
Due corpi in equilibrio termico
sono alla stessa temperatura
termico
Descrizione microscopica
Descrizione delle grandezze
di numero molto grande
di particelle
Molti parametri meccanica
statistica
ipotesi sulla struttura
(molecole e loro
interazione)
Descrizione macroscopica
Caratteristiche globali del sistema
•composizione
•Volume
•Pressione
F/S
•Temperatura
T
•Energia interna
•poche proprietà fondamentali
misurabili senza ipotesi sulla
struttura della materia
Coordinate termodinamiche
Misura della temperatura:
Equilibrio termico
2 corpi in contatto termico possono
scambiare calore
principio zero termodinamica:
se 2 corpi A e B sono in equilibrio
termico con un corpo C, allora A e
B sono in equilibrio termico tra loro
Calore: ente che viene scambiato
tra sistema e ambiente in virtù di
una differenza di temperatura
Termometri sostanze termometriche
Scale termometriche
Celsius
Fahrenheit
Kelvin
Joule
Lavoro: sistema idrostatico
1 cal= 4.186 J
Wab = ³ab Fxds = ³ab P S ds =
Calore:
energia che viene scambiato
tra sistema e ambiente a causa
di una loro differenza di
temperatura
Calore specifico
³ViVf P dV
Caloria:
quantità di calore
necessaria per aumentare
la temperatura di 1 g di
acqua da 14.5 ° a 15.5°
Q= m c 'T
Calore latente e cambiamenti di fase
Trasformazioni particolari
Energia interna:
energia appartenente ad un
sistema quando si trova in
equilibrio termodinamico
variazione di energia interna è
un effetto misurabile
dell’interazione
ADIABATICHE
CICLICHE
In un gas perfetto l’energia interna dipende solo dalla
temperatura
Eint= 3/2 nRT
Q=0
'U
=-W
'U
=0
Q=W
sistemi idrodinamici
ISOCORE
V= cost
'U
=Q
W=0
Carica elettrica
Forza elettrica
Q (C)
legge di Coulomb
F= k q1 q2/r2 ur
F= 6Fi = q0 6k qi /
Campo elettrico
Teorema di Gauss
Forza elettrica
Teorema di Gauss
Carica puntiforme attraverso una superficie sferica
ri2
E= F/q0 =(1/4SH0) q /r2 ur
ui
generato da più cariche
E= 6 Fi/ q0 = 6 Ei k 6 qi/ri2 ui
generato da una distribuzione continua
E= k ³ dq /r2 ur
Rappresentazione : Linee di forza
) = ³supc ExdS = qint/H0
Applicazioni: determinazione del campo
elettrico per distribuzioni semplici
Energia
Teorema di Gauss
) = ³sch ExdS = qint/H0
) = ³sch ExdS = ³sch (E1+ E2+ E3+ …. )xdS= qint/H0
S= S ur
Campo di una carica e sfera E~~S
) = ³supc ExdS = (1/4SH0) ³supc q /r2 ur x S ur=
=(1/4SH0) q /r2 ³supc S =(1/4SH0) q /r2(4Sr2 )
= q/H0
Caso generale
)= ³sc E cosT dS = ³sc kq/r2 cosT dS
= k q ³sc dS cosT /r2 = = k q ³sc d: =k q (4S) = q/H0
) = ³supc ExdS = qint/H0
definizione di una superficie gaussiana
Il flusso elettrico che attraversa una superficie chiusa
che non contiene cariche è nullo
determinazione del campo elettrico con il
teorema di Gauss
) = ³supc ExdS = qint/H0
•Scelta superficie gaussiana
stessa simmetria della distribuzione di carica
•Dimensione superficie gaussiana
deve includere il punto in cui si calcola E
•Dalla simmetria della distribuzione di carica si deve
conoscere in ogni punto della superficie la direzione di
E rispetto a dS
•Si scrive ExdS e si divide la superficie in zone in
cui E dS cosT = 0
E AdS o E dS cosT E¸¸ dS
•Si calcola il valore di qint
•Quindi si uguagliano i due membri e si determina il
valore di E
Applicazioni: determinazione del campo
elettrico per distribuzioni semplici
Piano indefinito
) = ³supc ExdS = 2ES= qint /H0=VS /H0
E = V / 2H0
Carica puntiforme
)= ³supc ExdS = E ³supc dS= E 4Sr2 = q/H0
E= (1/4SH0) q/r2
Teorema di Gauss equivalente legge di Coulomb
Distribuzione carica a simmetria sferica (uniforme)
Superficie esterna equivalente alla carica puntiforme
Superficie interna
qint=U V’=U (4/3 S r3)
)= ³supc ExdS = E ³supc dS= E 4Sr2 = qint /H0
E= qint / 4SH0 r2 = U (4/3 S r3) / 4SH0 r2 = Ur H0
E= kQ/a3 r
Conduttori in equilibrio
Lavoro della forza elettrica
Carica che si muove in E
W su q0 da E =- W da F esterna
Campo elettrico all’interno è sempre nullo: si creerebbe un campo che
provocherebbe il moto delle cariche e non sarebbe in equilibrio
E= F/ q0
F = q0E
Carica si distribuisce sulla superficie
dW = Fxds = q0E xds = q0E cosT ds
Dal teorema di Gauss
W1 = ³C1 Fxds = q0 ³C1 Exds
) = ³supc ExdS = ES= qint /H0=VS /H0
In generale il lavoro dipende dal percorso
E=V / H0
La carica tende ad accumularsi nei punti in cui
W1 = ³C1 Fxds z³C2 Fxds = W2
W= ³ch Fxds= ³C1 Fxds -³C2 Fxds
Definizione generale
la curvatura della superficie è maggiore,
W=q0³ch Exds=q0H
sulle punte
H
Forza elettromorice lavoro/carica
Cosa accade per una forza elettrostatica?
Lavoro del campo elettrostatico
dW = q0E xds = (q q0/4SH0) uxds/r2 = (q q0/4SH0) dr/r2
E xds = (q /4SH0) dr/r2
W1 = ³C1 Fxds = q0 ³C1 Exds = q0 ³ab (q /4SH0) dr/r2=
= (q q0/4SH0) ³ab dr/r2 = -(q q0/4SH0) (1/rb- 1/ra)
W = -(q q0/4SH0) (1/rb- 1/ra)
Forza elettrostatica è conservativa (centrale)
'U= U(b)- U(a)=-W
J
U(r)= qq0/4SH0r+C Energia potenziale elettrostatica
'V =Vb-Va= W/q0
V(r) = q/4SH0r+c
differenza di potenziale
Potenziale elettrostatico J/C=V
costante si definisce ponendo U(f)=V(f) =F(f)= E(f)= 0
Potenziale elettrico in un punto è uguale al lavoro necessario per
portare una carica di prova unitaria e positiva dall’infinito al
punto stesso
Unità di misura del Potenziale elettrostatico :
'V =Vb-Va= W/q0= -³ab Exds
V =J/C=Nm/C
J=VC
1 eV energia di un elettrone che supera una ddp di 1 V
1 eV= 1.6 10-19 CV
Campo elettrico uniforme
Calcolare ddp tra due punti posti a una distanza d con d¸¸E
'V =Vb-Va= W/q0= -³ab Exds= - E ³ab ds=-Ed
Vb<Va le linee di forza indicano la direzione
del potenziale decrescente
Ub<Ua (per q pos) una carica positiva diminuisce U quando va nel
verso del camp, accelera nella direzione del campo
Lavoro per spostare q di d 'U=-q Exb +q Exa = ½ m vb2- ½ m vb2
Calcolo del lavoro elettrostatico
Superfici equipotenziali
Lavoro di una carica
U(r)= qq0/4SH0r+C
Potenziale punto da una carica
V(r) = q/4SH0r+c
Lavoro di più cariche
U(r)= 6qqi/4SH0ri
ds A E
Potenziale di più cariche
V(r) = 6qi/4SH0ri+c
carica non compie lavoro se si muove lungo essa
Lavoro di una distribuzione continua di cariche
Potenziale di una distribuzione continua di cariche
-³ qE xd s = 0
Forza elettrica
Relazione tra campo e potenziale
Integrale di linea
W1 = ³C1 Fxds
legge di Coulomb
derivata gradiente
Ricavare V da E
Energia
conservativa elettrostatica
'U= U(b)- U(a)=-W
V = -³ E xd s = - q ³ E d r = - q ³ 1/4 S H d r = q/4 S H >r]
V= 1/4 S HR q/r)
Campo elettrico
Ricavare E da V
E= F/ q0
dV = E xd s
campo radiale
Er= -dV/dr
dr
Er
Integrale
di
superficie
Er = dV/dr
Integrale di linea
Potenziale
V = - ³C1 Exds
derivata gradiente
'V =Vb-Va= W/q0
Teorema di Gauss
) = ³supc ExdS = qint/H0
Calcolo del lavoro elettrostatico
W1 = ³C1 Fxds
Lavoro di una carica
Potenziale in un punto
campo una carica
U(r)= qq0/4SH0r+C
V(r) = q/4SH0r+c
campo più cariche
U(r)= 6qqi/4SH0ri
V(r) = 6qi/4SH0ri+c
campo una distribuzione continua di cariche
U(r)= k0q³dq/r
V(r) = k0q³dqr
Quale andamento di campo e potenziale
per diverse configurazioni di cariche?
Carica puntiforme
E= k q /r2 ur
V= ³C1Exds = k q0/r
E= - dV/dr=d(k q0/r ) /dr
Sfera conduttrice
Interno
E=0
Esterno
E= k q /r2 ur
V=cost
Piani paralleli
Campo elettrico uniforme
E= V/H0ux
V= ³C1Exds = V/H0(x-xi)
E= - dV/ dx
V= ³C1Exds = k q0/r
E= - d(k q0/r ) dr
Sfera carica omogeneamente
Interno
E= kqr/R3=Ur/3H0 V= U/6H0(R2-r2)
Esterno
V= ³C1Exds = k q0/r
E= k q /r2 ur
Vb<Va le linee di forza indicano la direzione del
potenziale decrescente
Ub<Ua (per q pos) una carica positiva diminuisce
U quando va nel verso del campo, accelera nella
direzione del campo
E= - d(k q0/r ) dr
Moto di una carica conservazione energia
Superfici equipotenziali
Se una particella cambia velocità
W='Ek=1/2 mvb2- 1/2 mva2
-³ qE xd s = 0
Lavoro per spostare q di d
ds A E
W= 'U=-(qVb-qVa)
carica non compie lavoro se si muove lungo essa
E= 1/2 mv2 +qV
Per un campo uniforme
V(x)= -Ex +costante
½ m vb2- ½ m vb2 =qE(xb-xa)
E cost = a uniformemente accelerato
Conduttori in equilibrio
Capacità
Campo elettrico all’interno è sempre nullo
Carica si distribuisce sulla superficie
E=V / H0
) = ³supc ExdS = ES= qint /H0=VS
La carica tende ad accumularsi nei punti in cui
la curvatura della superficie è maggiore, sulle punte
Carica indotta: Inserendo un conduttore in un campo
si ha una distribuzione di carica indotta
Superficie:
stesso potenziale
Vb-Va = - ³ab Exds
2 conduttori in contatto sono allo stesso
potenziale
V1 = q1/4SH0r1 = V2 = q2/4SH0r2
q1/ q2=r1/r2
2 conduttori tra i quali c’è induzione completa:
Condensatore Armature
Capacità
C= Q/'V
F= C/V
mF PF nF pF
Sferico
V1-V2= q/4SH0 (1/r1- 1/r2)
C= q/(V1-V2)= 4SH0 r1 r2/(r2-r1)
Dipende solo dalla geometria e dal mezzo
Condensatore piano
Collegamento di condensatori
Parallelo
E= V/H0 = q/H0A
'V1= 'V2 = V
'v=Ed = qd/H0A
q1=C1V
C= q/'v=q/(qd/H0A)= H0A/d
q=q1+ q2= (C1 +C2) V
q2=C2V
Ceq= (C1 +C2)
Ceq=6Ci
Energia immagazzinata in un condensatore
serie
condensatore scarico
q1=q2 = q
processo di carica
separazione di cariche
Vc-Vb=q/C1 Vb-Va=q/ C2
richiede un lavoro che non dipende dal processo
V= Vc-Va=q/C1+ q/C2=q(1/ C1) + (1/ C2)
q
Ceq= (1/C1) +(1/C2)
Lavoro necessario per trasferire un ulteriore elemento di carica
Ceq= 61/Ci
dW= 'V dq= q/C dq
'V=q/C
W= ³dW= ³0Q q/C dq= ½ q2/C
Energia potenziale immagazzinata da un condensatore
U= ½ q2/C = ½ q 'V= ½ C 'V2
In un condensatore piano 'V=Ed
U = ½ H0A/d (Ed)2= ½ H0Ad E2
C= H0A/d
densità di energia
Conduzione elettrica
Dielettrico
Conduttori (solidi)
proprietà macroscopiche
Non cambia la caricadiminuisce 'V
'V= 'V0/k
C= Q0/ 'V= k Q0/ 'V
C=kC0
H= k H0
proprietà microscopiche
distribuzione di carica
campo elettrico
potenziale elettrico
struttura metallica
elettroni liberi portatori di carica
materiali in cui le cariche elettriche
si muovono liberamente
elettroni liberi per unità di volume in Cu
n= (NA U/A= (6.022 1026 8.96 103)/ 63.55
= 8.49 1028 e/m3
moto disordinato vm = 1/N(6 vi) = 0
C1 e C2 a potenziali V1 e V2
si portano allo stesso potenziale V
moto ordinato di elettroni
che formano una corrente elettrica
tempo breve
Per avere una corrente per tempo lungo occorre:
dispositivo capace di mantenere una ddp, campo elettrico tra
due conduttori o punti diversi di uno stesso conduttore
Generatore di f.e.m.
+
portatori : elettroni (solidi) ioni (gas liquidi)
moto delle cariche ostacolato: resistenza
necessità di lavoro per vincere le forze che si oppongono al
passaggio di corrente, a spese dell’energia del generatore
Corrente elettrica e moto di cariche
V= S 'x
n portatori di carica per unità di volume
'q= (n S 'x) q
'x= vd 't
La carica complessiva che passa attraverso
la superficie S
'q= (n S vd 't) q
(cosT)
I= n q S vd
j = n+ e vd
densità di corrente
I = j S (se S A vd
vdvE
Corrente elettrica
Conduttore
n e /vol ( portatori di carica)
E
Campo elettrico sul conduttore
I portatori di carica si muovono sotto l’azione di F= e E
con vd lungo direzione di E e danno origine a corrente
S superficie all’interno del conduttore
'q carica che passa attraverso S nel tempo 't
Imed= 'q/ 't
A= C/s
I= lim 'q/ 't
verso della corrente,
verso delle cariche positive
Conducibilità e legge di ohm
Legge sperimentale
ddp ai capi di un conduttore
IvV
'V= R I
R 'V/ I
:= V/A
Resistore
R = U (L/A)
U= 1/ V
resistività
j =I/S= V/RS= El/RA= V E
Variazione con la temperatura
R= R0[1+D(T-T0)]
Tavola delle resistività di alcuni materiali
(calcolati a 20 °C)
Superconduttori
Resistività U (in : × mm2 / m )
Materiale
Argento
Rame
Oro
Alluminio
Tungsteno
Platino
Ferro
Acciaio
Piombo
Mercurio
Costantana (lega 80% Cu, 40% Ni)
Carbonio
Germanio
Silicio
Ambra
Vetro
Mica
Zolfo
0.016
0.017
0.024
0.028
0.055
0.10
0.13
0.18
0.22
0.94
0.49
35
60 × 102
2.3 × 109
5 × 1020
1016 ÷ 1020
1017 ÷ 1021
1021
Modello microscopico
F=ma
Effetto Joule
F= qE
dW= Vdq= V I dt
P= dW/dt= VI
a=qE/m
P = V I = R i2= V2/R
v = v0+at= v0+ qE/m t
W = R i2 t
vd= qE/m W
j = n+ q vd = n
j =V E
V= n q2/m W
q2
E/m W
1 kWh= 3.6 106 J
j=VE
Forza elettromotrice
Collegamento di resistori
Serie
Generatore di f.e.m.
Va-Vb=R1i Vb-Vc=R2i
Dispositivo che aumenta l’energia potenziale delle
cariche nel circuito
Va-Vc=(R1+R2)i= Reqi
f.e.m
Req = 6Ri
H
Parallelo
'V=
H -Ir
i= i1+i2
H=
Ir + IR
i= V/R1+V/R2=V(1/R1+1/R2) =V/Req
lavoro per unità di carica V
Req = (1/R1) +(1/R2)
Req= 61/Ci
Magnetismo
Carica e scarica di un condensatore RC
H= VR+VC = = RI(t)+ q(t)/c
Scarica di un condensatore
Magnesia
Interazione ambiente
ddp ai capi del condensatore V0=q0/C
Uc=q2/2C
0= RI+q/C
campo magnetico
Magnetite
Fe3O4
1. attrazione di limatura di ferro
2. bacchetta di ferro vicino a
magnetite acquista le stesse
proprietà
3. magnete sospeso ad un filo
I=-dq/dt= -q/RC
- poli positivi e negativi
-fenomeni non dipendenti da q
³0qdq/q= ³0tdt/RC
4. ago si dispone verso nord +
- comportamento simile dipolo in E
- esistenza di un campo magnetico
terrestre
ln q/q0=-t/RC
q(t)=q0e-t/RC
5.
studio quantitativo
- proporzionalità con 1/r2
campo magnetico :proprietà
Similitudine con forza elettrica:
• interazione tra magneti attrattiva o repulsiva
• definizione di Campo B
• modulo: proporzionalità con 1/r2
campo magnetico :proprietà
Differenze
ogni magnete ha due poli
nord -sud
impossibilità di dividere polo positivo e negativo
Relazione tra forze elettriche e magnetiche:
una corrente elettrica fa deviare un ago magnetico
Oersted (1819)
Generatore
campo
• massa
•carica
•carica in moto
campo magnetico : forza di Lorentz
Forza magnetica esercitata da B su carica in moto *
Fvq
FvB
Fvv
oggetto interazione
G
E
B
massa
carica
carica in moto
campo magnetico : forza di Lorentz
FA v
W =³pQ Fxds= ³pQ Fxv dt= 0
FAB, v
W=0 ' Ek = 0
F = qv x B Forza di Lorentz
F= qvBsenT
T = N s/C m= kg/ s C
quando v¸¸B
F=0 il corpo procede indisturbato
L’energia cinetica di una particella non viene
modificata da B
Forza magnetica non compie lavoro quando si
sposta una particella **
Verso di B determinato dalla regola della mano destra se carica +
B può cambiare la direzione della velocità,
Forza magnetica è sempre perpendicolare a B **
non il modulo
campo magnetico : forza di Lorentz
Similitudine e differenza con forza elettrica:
Moto di una particella carica in un campo
magnetico
Fe agisce su carica
Fm agisce su carica in moto
Campo magnetico uniforme
F ¸¸ E
FAB
Particella q+ v AB T=S/2
moto circolare
F=ma=mv2/r
linee di forza
linee di campo
Q
W = q³p Exds= q(Vp-Vq)
W =³pQ Fxds= 0
F=qvB
W ='EK= q(Vp-Vq)
W ='EK= 0
r=mv/qB
B modifica la direzione di v
T= 2Sr/v=2S/v (mv/qB)= 2Sm/qB
non il modulo
Z=2S/T =qB/m non dipende da v
raggio costante
Campo magnetico uniforme T=generico
F=qv x B =q(vn+vp) x B =qvnx B
moto elicoidale
r=mvn /qB = =mv senT /qB
Vp=cost
Applicazioni: Spettrometro di massa
Ciclotrone
Determinazione di v quando
particella si muove in equilibrio
r = mv/qB
qE=qvB
½ m v2 = qV
V= E/B
Dopo t1
t1=1/2 (2Sr1/v1)=Sm/qB
½ m v2 = qV
v= (2qV/m)1/2
r = mv/qB= 1/B (2mV/q)1/2
½ m v22 = ½ m v12 +qV
forza magnetica su un conduttore
percorso da corrente
Corrente: moto di elettroni o ioni
se il conduttore non è rettilineo
Esperimento: filo tra le espansioni di un magnete
dF= I ds x B
F= qv x B forza di lorentz su una carica in moto
F= ³I ds x B
conduttore con n cariche per unità di volume vd
F= (qvd x B) nAl =Al j x B= I l x B
ricorda I=nqvdA
forza su un filo che giace su un piano ed è
immerso in un campo magnetico uniforme
non dipende dalla forma del filo, ma dai
punti iniziali e finali,
in un percorso chiuso F=0
Momento su una spira in un campo magnetico
Spira rettangolare percorsa da corrente I
Campo B uniforme piano della spira
Forze agenti sui lati
B ~~b ds x B = 0 F1=F3= forza nulla
F2=F4=IaB
F2 uscente
F4 entrante
P= IAun momento magnetico
M= P x B
Galvanometro
momento spira
P= IAun
momento bobina P= NiAun
Linee di campo
perpendicolari alla superficie
Forze producono una coppia che produce rotazione
in senso orario intorno all’asse della spira il momento
Momento della forza
M= F2b/2 + F4b/2 = IabB=IAB
M= NiAB
Se il campo magnetico non è nel piano della spira
KT=NiAB
M= F2b/2senT + F4b/2 senT= IabBsenT=IABsenT
M=I A x B
P= IAun momento di dipolo magnetico
M= P x B
campo magnetico
su carica in moto
su conduttore
forza di Lorentz
F= q v x B
dF= I dl x B
rettilineo
forma arbitraria
e B cost
F= I l x B
F= I l’ x B
Legge di Biot-Savart
Verificato che B esercita F su I
la corrente I genera B in P?
Legge sperimentale: si misura B in P
dB A ds e dr
dBv1/r2, I, ds
dBvsenT
Momento agente su una spira
W=P x B
Momento magnetico
P= I A
Circuiti particolari
dB =P0/4S(I dsxur/r2)
P0/4S km= 10-7 Tm/A
Legge elementare di laplace
Generatore del campo Ids
Direzione: perpendicolare
spira circolare
dB =P0/4S(I dsxur/r2)
Filo rettilineo
dsAur
dB =P0/4S(I dsxur/r2)
Bx, B y
dB =P0/4SI (ds senT/r2)
dB =P0/4SI (senTdT/R)
dB =P0/4SI d(cosT/R
B =P0I/2Sr
r senT= R
dBx =P0/4S(I dscosT/r2)
r-2= sen2T/R2
-s tgT=R
ds=RdT/sen2T
B= P0 I /4S³ dscosT/r2
cosT=R/(x2+R2)1/2
r= /(x2+R2)1/2
B= P0 IR/4S(x2+R2)3/2 ³ ds
B= P0 IR2 /2(x2+R2)3/2
Centro B= P0 I/2R
2SR
Forza magnetica tra due conduttori
Carica in moto
dB =P0/4S(I dsxur/r2)
Forza su un conduttore dovuta ad un campo B
Ids=jAds= n q v A ds= n q v dW
Filo produce campo magnetico in grado di produrre forza su un
altro filo due fili esercitano una mutua interazione
Corrente I1 produce campo magnetico B1
dB =P0/4S(qvxur/r2)n dW
Per una carica
B =P0/4S(qvxur/r2)
F= Il x B
B1 =P0I1/2Sr perpendicolare al filo 2
F2= I2l xB1
forza agente su filo 2
F2 = P0lI1I2/2Sd
F1= F2
Se la corrente è parallela i fili si attraggono
Teorema di Ampère
aghi magnetici intorno filo percorso da corrente I
linee di campo
circonferenze orientate
Intensità di B
uguale in ogni punto della circonferenza
BvI
B v 1/r
Si calcoli
B•ds
Si sommi il contributo su un percorso circolare
B • ds = Bds
B »» ds
³c B • ds =B ³ c ds = (P0I/2Sr )(2Sr)= P0I
³ c B • ds =P0I
I è la corrente concatenata al percorso
E’ analoga alla legge di Gauss per il magnetismo
solenoide
Se il percorso non ha correnti concatenate
³ c B • ds = 0 linee di campo entranti = linee uscenti
Come la legge di gauss è utile per calcolare B generato da circuiti
simmetrici
Insieme di spire
Se molto fitte e numerose (lungo)
Solenoide ideale (poli di un magnete)
Filo
³ c B • ds = B 2Sr =P0I
B=P0I/2Sd
³ c B • ds = ³ c B • ds = Bh=P0I N
B= P0IN /h = P0In
Toroide
³ c B • ds = B 2Sr =P0NI
B=P0NI/2Sr
Campi magnetici variabile nel tempo
Magnetismo di un elettrone
q, v=0
E
q,v
B
B variabile
E Faraday
qe= 1.6 10-19 C
E variabile
B Ampere-Maxwell
T=10-16 s
si parla solo di campi elettromagnetici
Ie = qe /T= 1.6 10-3 A
legge Faraday induzione
Ie = qe /T= qe /2Sr/v = qe v /2S
I° esperimento
P=IA= qe v /2SSr2)=1/2 qe v r
spira con galvanometro
P=1/2 qe v r= (qe /2m)L
Momento magnetico orbitale
Momento magnetico di spin
magnete in moto B variabile
Se un magnete si muove rispetto ad una spira
si ha produzione di corrente
II° esperimento
Generalmente in un materiale i momenti magnetici si
annullano
2 circuiti affacciati
Proprietà: materiali ferromagnetici
si chiude il primo circuito e si misura corrente nel secondo circuito
Legge di Faraday
quale corrente circola nel circuito?
Una corrente elettrica può essere generata da un campo
magnetico variabile : descrizione quantitativa
I= H/R=-(1/R) d)b /dt
corrente effetto secondario, dipende dalla resistenza del circuito
Flusso magnetico:
)b
a circuito aperto:
Tm2=W
³ B • dA
V=
se il flusso )b concatenato con un circuito varia nel tempo si ha
fem indotta H
H= -d)b /dt
spira
H = -d)b /dt= -d/dt(BA cosT)
bobina
H=- d)b /dt
fem indotta si comporta come la fem di un generatore
ddp che si misura quando non passa corrente
H = -d)b /dt=³c E•ds
H= - N d)m/dt
si ha fem indotta quando
1 varia il modulo di B
2 varia la superficie del circuito
3 varia l’angolo tra B e il circuito
2- conduttore rettilineo parte di un circuito
Forza elettromotrice dinamica indotta
R conduttore =0
B
resistenza circuito=R
x
v costante (dx)
1- conduttore rettilineo
B uniforme direzione entrante
B
B uniforme direzione entrante
F =q vxB (basso)
separazione di carica che genera campo elettrico
+
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
l
x
x
x
x
x
x
x
x
x
x
x
x
l
R
d)m=Blx
H= - d )m /dt =- d (Blx /dt = - Bl (dx/dt) = - Blv
V
-
x
x
conduttore che si muove in un campo magnetico B costante
v costante (dx)
x
x
x
x
x
x
x
x
x
I
x
x
x
x
x
x
x
x
x
x
x
x
x
x
V
x
I = |H_R = Blv/R
finché non si avrà condizione di equilibrio
qE= qvB
V=El E cost
Lavoro della forza applicata = energia el. che la fem indotta fornisce al circuito
= energia dissipata sotto forma di calore
V=vBl
la tensione V è presente ai capi del conduttore finché si muove nel campo
magnetico, il segno dipende dal verso del moto
Fm= IlB=-Fappl
P= Fapplv= IlBv= (lBv)2/R=V2/R
Generatore di corrente alternata
Legge di Lenz
)m variabile produce E con caratteristiche diverse da E statico
H= - d)m/dt
La polarità della fem indotta tende a produrre una
corrente che crea un campo magnetico che si oppone
alla variazione di flusso attraverso il circuito
)m= BA cos T= BA cos Zt
Corrente indotta tende a mantenere costante il flusso
iniziale
spira circolare in campo magnetico
H= - d)m/dt= BA Zsen Zt
conseguenza del principio di conservazione dell’energia
Flusso magnetico variabile produce un campo elettrico E
H= - d)m/dtE tg spira lavoro qE s
q H= q E 2Sr
E= 1/ 2Sr d)m/dt
H = -d)b /dt=³c E•ds
Autoinduzione
autoinduttanza: quando si chiude un circuito la corrente non passa
istantaneamente da 0 al massimo, aumenta la corrente e aumenta nel tempo
anche il flusso magnetico concatenato con il circuito, l’aumento produce
una fem che si oppone all’aumento del flusso fem autoindotta.
per una bobina
H= - N d)m/dt = - L dI/dt
L =N)m/I
induttaza
dipende dalla geometria e fisica
L = H/dI/dt
H = Vs/A=Wb/A
Induttanza impedisce di crescere o diminure istantaneamente W=L/R
Energia immagazzinata
I H= I2R + LI dI/dt
dU/dT= LI dI/dt
U=LI2
Una carica +2q è posta nella posizione x=0 e una seconda carica –5q
nella posizione x=L Determinare qual è il valore della posizione del
punto P tra 0 e L(come rapporto di x/L) in cui il potenziale è 0.
campo elettrico (statico)
forza di Lorentz su carica in moto
legge di Coulomb
A. 1/3
campo magnetico
F= q v x B
E= F/ q0
B. 1/5
dF= I dl x B
C. 5/2
D. 2/7
*
Teorema di Gauss
E. 3/4
Legge di Biot-Savart
) = ³supc ExdS = qint/H0
F. 2/5
Perché……Vp=k(2q)/x+ k(-5q)/(L-x)== 2L=7x
dB =P0/4S(I dsxur/r2)
Forza conservativa
Potenziale
Teorema di Ampère
V = - ³C1 Exds
³lineac B • ds =P0I
'V =Vb-Va= W/q0
V = - ³lineac Exds=0
campo magnetico
su carica in moto
su conduttore
rettilineo
forma arbitraria
e B cost
forza di Lorentz
F= q v x B
q
v=0
E
q
vำ0
B
dF= I dl x B
F= I l x B
B variabile
?E Faraday
E variabile
?B Ampere-Maxwell
F= I l’ x B
si parla solo di campi elettromagnetici
Momento agente su una spira
W=P x B
Momento magnetico
Campi magnetici variabile nel tempo
P= I A
legge Faraday: induzione
Legge di Faraday: una corrente elettrica può essere
generata da un campo magnetico variabile nel tempo:
descrizione quantitativa
I° esperimento
Flusso magnetico:
spira con galvanometro
magnete in moto
B variabile
Se un magnete si muove rispetto ad
una spira si ha
produzione di corrente indotta
II° esperimento
2 circuiti affacciati
si chiude il primo circuito
si misura corrente nel secondo circuito
)b =BƔdA
Tm2=W
flusso )b concatenato con un circuito
quando varia nel tempo si ha fem indotta H
H= -d)b /dt
H = fem tensione ai capi di un generatore
quando la corrente è zero (circuito aperto)
H= IR+Ir
Conclusione: una corrente elettrica può
essere generata da un campo magnetico
variabile nel tempo
spira
H = -d)b /dt= -d/dt(BA cosT)
bobina
H= - N d)m/dt
si ha fem indotta quando
1 varia il modulo di B
2 varia la superficie del circuito
3 varia l’angolo tra B e il circuito
quale corrente circola nel circuito?
I= H/R=-(1/R) d)b /dt
corrente effetto secondario, dipende dalla resistenza del circuito
a circuito aperto:
V=
H=- d)b /dt
fem indotta si comporta come la fem di un generatore
ddp che si misura quando non passa corrente
H = -d)b /dt=³c E•ds
Forza elettromotrice dinamica indotta
conduttore che si muove in un campo magnetico B costante
1- conduttore rettilineo
v costante
B uniforme direzione entrante
F =q vxB (basso)
separazione di carica che genera campo elettrico
finché non si avrà condizione di equilibrio
qE= qvB
V=El E cost
V=vBl
la tensione V è presente ai capi del conduttore finché si muove nel campo
magnetico, il segno dipende dal verso del moto
2- conduttore rettilineo è parte di un circuito chiuso
Generatore di corrente alternata
resistenza conduttore =0
resistenza circuito=R
Lavoro su bobina
v costante
energia elettrica
)m variabile produce E con caratteristiche diverse da E statico
B uniforme direzione entrante
spira circolare in campo magnetico
)m=BA= Blx
H= - d)m/dt
H= - d )m /dt =- d (Blx /dt = - Bl (dx/dt) = - Blv
)m= BA cos T= BA cos Zt
H= - d)m/dt= BA Zsen Zt
I = |H_R = Blv/R circuito equivalente
Lavoro della forza applicata
= energia el. che la fem indotta fornisce al circuito
= energia dissipata sotto forma di calore
Fm= IlB=-Fappl
P= Fapplv= IlBv= (lBv)2/R=I2/R
Legge di Lenz
La polarità della fem indotta
tende a produrre una corrente
che crea un campo magnetico
che si oppone alla variazione di
flusso attraverso il circuito
Corrente indotta tende a
mantenere costante il flusso
iniziale
La legge serve per determinare
la direzione della corrente
Considerazioni energetiche
Forze elettromotrici indotte e campi elettrici
)m
aumenta
entrante
I indotta
produce B
uscente
antioraria
)m
diminuisce
uscente
I indotta
produce B
entrante
oraria
Flusso magnetico variabile produce una corrente indotta
corrente è generata da un campo elettrico E
Un flusso magnetico variabile crea un campo elettrico E
(anche nel vuoto, in assenza di cariche )
H= - d)m/dtE tg spira lavoro Fs qE l
q H= q E 2Sr
E=-(1/2Sr) d)m/dt =-(1/2Sr) d%Sr2)/dt=-r/2 dB/dt
H= -d)b /dt=³c E•ds
Campo con proprietà diverse,
Non conservativo
Circuiti RL
Autoinduzione
autoinduttanza: quando si chiude un circuito la corrente non passa
istantaneamente da 0 al massimo, aumenta la corrente e aumenta nel tempo
anche il flusso magnetico concatenato con il circuito, l’aumento produce
una fem che si oppone all’aumento del flusso fem autoindotta.
per una bobina
H= = - L dI/dt
H– IR - L dI/dt= 0
,W H /R(1- e-Rt/L)
H= - N d)m/dt = - L dI/dt
L =N)m/I
Induttanza impedisce alla corrente di
crescere o diminuire istantaneamente
W=L/R
induttaza
Energia immagazzinata
dipende dalla geometria e fisica
I H= I2R + LI dI/dt
L = H/dI/dt
dU/dt= LI dI/dt
H = Vs/A=Wb/A
U=1/2 LI2
CAMPI ELETTROMAGNETICI
B variabile
E Faraday (Lenz)
H = -d)b /dt=³c E•ds
E variabile
B Ampère-Maxwell
Teorema di Ampère
c BƔds =P0I
I è la corrente di conduzione
concatenata alla linea s
è valida solo se corrente è continua (spazio)
Legge Ampère-Maxwell
Come si calcola la corrente di conduzione?
Si considera una superficie S delimitata dal
contorno s e si calcola la corrente all’interno
della stessa.
La corrente i che fluisce attraverso tutte le
superfici delimitate da s è la medesima se la
corrente entrante è uguale a quella uscente
condizione di stazionarietà
Cosa succede se si interrompe la corrente?
I(S2)=0
Situazione contraddittoria
Corrente di spostamento
Leggi di Maxwell
armature di un condensatore
a1 variazione di carica dq/dt = i entrante
Vuoto
c=(P0H0)-1/2= 3 108 m/s
cariche
q
corrente di spostamento legata alla variazione di E
nel condensatore
correnti di conduzione
i
Is= H0d)E/dt
³supc ExdA=q/H0
a2 variazione di carica -dq/dt = i uscente
Da Gauss ) = q/H 0
) = ³supc ExdS
³c E•ds= -d) (B) /dt
Is= H0d)E/dt =dq/dt
E variabile è da considerare come corrente di raccordo
c BƔds =P0(Ic+ Is)= P0(Ic+ H0d)E/dt)
³supc BxdA=0
c BƔds =P0Ic+ P0H0d)E/dt)
stessi effetti corrente e variazioni del campo elettrico
Se Ic=0 c
BƔds =P0H0d)E/dt= 1/c2 d)E/dt
F= qE+ qvxB
Onde elettromagnetiche
CAMPI ELETTROMAGNETICI
B variabile
E Faraday (Lenz)
Dalle leggi di Maxwell:
H = -d)b /dt=³c E•ds
Onda piana
Onda trasversale
E variabile
B Ampère-Maxwell
Propagazione con velocità c
c= OQ
Teorema di Ampère
c BƔds =P0I
I è la corrente di conduzione
concatenata alla linea s
Legge Ampère-Maxwell
Come si calcola la corrente di conduzione?
Si considera una superficie S delimitata dal
contorno s e si calcola la corrente all’interno
della stessa.
La corrente i che fluisce attraverso tutte le
superfici delimitate da s è la medesima se la
corrente entrante è uguale a quella uscente
Corrente di spostamento
armature di un condensatore
a1 variazione di carica dq/dt = i entrante
a2 variazione di carica -dq/dt = i uscente
corrente di spostamento legata alla variazione di E
nel condensatore
Is= H0d)E/dt
Da Gauss ) = q/H 0
) = ³supc ExdS
Is= H0d)E/dt =dq/dt
condizione di stazionarietà
E variabile è da considerare come corrente di raccordo
Cosa succede se si interrompe la corrente?
c BƔds =P0(Ic+ Is)= P0(Ic+ H0d)E/dt)
I(S2)=0
stessi effetti corrente e variazioni del campo elettrico
Situazione contraddittoria
Se Ic=0 c
Se Ic=0
BƔds =P0H0d)E/dt= 1/c2 d)E/dt
Leggi di Maxwell
c BƔds = P0(Ic+ Is)=
P0H0d)E/dt= 1/c2 d)E/dt
Vuoto
c=(P0H0)-1/2= 3 108 m/s
c BƔds = 1/c2 d)E/dt
cariche
q
correnti di conduzione
i
Simmetria con la legge di Faraday
circuitazione del campo elettrico
³c E•ds= -d) (B) /dt
³supc ExdA=q/H0
³supc BxdA=0
F= qE+ qvxB
³c E•ds= -d) (B) /dt
c BƔds =P0Ic+ P0H0d)E/dt)
campo magnetico
Onde elettromagnetiche
su carica in moto
su conduttore
Dalle leggi di Maxwell:
Onda piana
rettilineo
Onda trasversale
Propagazione con velocità c
forma arbitraria
e B cost
c= OQ
forza di Lorentz
F= q v x B
dF= I dl x B
F= I l x B
F= I l’ x B
Momento agente su una spira
W=P x B
Momento magnetico
Uno ione con carica q,
massa m
e velocità v
entra in un campo magnetico e deflette in una traiettoria con
raggio di curvatura R.
Se un secondo ione ha velocità 2v (m, q e B rimangono
invariati) quale sarà il raggio della seconda traiettoria?
A. 4 R
B. 2 R
*
C. R
D. 1/2 R
E. 1/4 R
F=qvxB = ma= mv2/r
P= I A
E’ possibile orientare una spira rettangolare percorsa da
corrente in un campo magnetico uniforme in modo che
non tenda a ruotare?
A. No, la spira tende sempre a ruotare
B. Sì se il campo magnetico è perpendicolare al piano
della spira
C. Sì se il campo magnetico è parallelo al lato più lungo della
spira
D. Sì se il campo magnetico è parallelo al lato più corto della
spira
r= mv/qB
E. Sì se il campo magnetico è orientato parallelamente ad uno
qualsiasi dei lati della spira
Perché M= iAunxB
A quale distanza da un filo rettilineo percorso da una
corrente di 5 A il campo magnetico del filo è uguale al
campo magnetico terrestre che è circa 5 10-5 T?
A. 50 cm
B. 2 cm
C. 0
D. 6 mm
E. 50 m
Perché B= P0I/2 Sr
*
r= P0I/2 SB
Nella figura seguente ci sono tre fili paralleli percorsi dalla stessa corrente
I con quattro linee chiuse. Ordinatele secondo i valori decrescenti del
modulo ³ Bx ds lungo ciascuna di esse
a
In un campo magnetico uniforme di 0.5 T sono immerse
con direzione perpendicolare ,al piano del circuito, due
guide parallele separate di 25 cm e unite da due sbarre, una
fissa e una mobile con velocità di 50 cm/sec. quanto vale la
forza elettromotrice indotta nella spira?
A. 625
B. 6.25
C. 0.25
D. 0.063
*
E. 1
F. 0.5
Perchè E= -d)i/dt
)i=Blx
E= Blv
Due fili paralleli sono separati da una distanza d=3 cm. I
fili sono percorsi da una corrente di 4 A e 3 A rispettivamente
in opposte direzioni.
Qual è la forza per unità di lunghezza (N/m) che i fili
esercitano tra di loro?
A. 0
B. 1*10-5 attrattiva
C. 3*10-5 attrattiva
D. 4*10-5 attrattiva
E. 8*10-5 attrattiva
F. 12*10-5 attrattiva
G. 1*10-5 repulsiva
H. 3*10-5 repulsiva
I. 4*10-5 repulsiva
L. 8*10-5 repulsiva
*
-5
M. 12*10 repulsiva
3HUFK« )/ P0I1I2 SG
Un circuito privo di forza elettromotrice è percorso da corrente
quando
A. esiste un flusso magnetico statico concatenato con il circuito
B. esiste un flusso magnetico variabile concatenato con il
circuito
C. è immerso in un campo elettromagnetico statico non
uniforme
D. è immerso in un campo elettromagnetico statico normale al
circuito
E. è immerso in un campo elettromagnetico statico parallelo al
circuito
Perché …( d)/dt….
© Copyright 2026 Paperzz