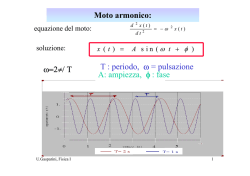
unità C2 Moti a una dimensione M oti con traiettoria rettilinea prevedono i modelli fisici più semplici: per questo lo studio della Cinematica inizia sempre con i moti monodimensionali. prerequisiti sistema di coordinate monodimensionale grandezze fisiche cinematiche legge oraria e diagramma s-t coefficiente angolare di una retta punto materiale 2.1 Moti rettilinei 2.2 Moto rettilineo uniforme 2.3 Moto rettilineo uniformemente accelerato 2.4 Moto in caduta libera 2.5 Moto armonico Il loro sistema di riferimento è il singolo asse cartesiano. Moto con traiettoria rettilinea, velocità costante, accelerazione nulla. Moto con traiettoria rettilinea, velocità variabile e accelerazione costante. Moto rettilineo uniformemente accelerato dall’accelerazione di gravità. Particolare moto rettilineo con velocità e accelerazione variabili. UNITÀ C2 - MOTI A UNA DIMENSIONE 2.1 Moti rettilinei Per i moti a una dimensione è sufficiente un sistema di riferimento costituito da un singolo asse cartesiano e questo, come vedremo a breve, evita l’impiego di vettori per rappresentare le grandezze fisiche cinematiche. Siccome la traiettoria coincide con la direzione di una retta (fig. 2.1a), questi moti sono detti moti rettilinei. Il moto di un motoscafo sulla superficie piana del mare (fig. 2.1b) può essere considerato rettilineo se i punti della sua rotta-traiettoria appartengono a una retta. Figura 2.1 (a) Traiettoria rettilinea rispetto a un sistema di coordinate tridimensionale per il punto materiale P. Come sistema di riferimento si sovrappone un asse cartesiano alla traiettoria rettilinea. (b) La cinematica di un motoscafo sul mare bidimensionale può essere ridotta a monodimensionale se la rotta è rettilinea. z P traiettoria rettilinea O y x a b Vettore posizione In figura 2.2a l’asse cartesiano x che impiegheremo come sistema di riferimento per i moti rettilinei: sono indicati il versore i e l’origine O. Supponiamo che all’istante t il punto materiale P occupi il punto individuato dal vettore posizione OP(t ) = x(t ) i Osserviamo che la (2.1) non è altro che la (1.2) dell’unità C1 dove, ovviamente, compare solo la componente vettoriale relativa all’asse x del vettore posizione. La direzione di OP non cambia perché è vincolata a quella dell’asse cartesiano che deve rimanere fermo: quindi l’informazione offerta dal versore i sulla direzione del vettore non è necessaria e nella (2.1) è sufficiente indicare solo la componente scalare (2.1) OP(t) O P x x(t) i a P x(t) = -10 m OP(t) O i x (m) b di OP , x(t), cioè la coordinata cartesiana di P. Quindi, nei moti rettilinei, al vettore posizione può essere applicata l’equivalenza OP(t ) x(t ) i x(t ) (2.2) Il termine x(t) è positivo (negativo) quando la posizione di P è sul semiasse positivo (negativo) dell’asse cartesiano. Figura 2.2 (a) Sistema di riferimento per il moto rettilineo e vettore posizione. (b) Esempio di equivalenza tra vettore posizione e coordinata cartesiana. 251 252 MODULO C - CINEMATICA Per esempio, la posizione del punto materiale P in figura 2.2b individuata dal vettore posizione OP(t ) (10 m) i può essere espressa con la sola componente scalare x(t ) = 10 m senza perdere informazioni su modulo, direzione e verso di OP . Vettore spostamento Ipotizziamo un punto materiale P in moto sull’asse x (fig. 2.3a): il vettore posizione nel generico istante t è OP(t ) x(t ) i e quello in un successivo istante t + t è OP(t t ) x(t t ) i Dalla definizione (1.5) dell’unità C1 il vettore spostamento è la differenza tra i due vettori posizione, cioè OP x(t t ) i x(t ) i = [ x(t t ) x(t )] i Se poniamo x(t t ) x(t ) x il vettore spostamento diventa (2.3) OP x i dove il segno algebrico di x dipende se il vettore è concorde o discorde al versore o, in termini equivalenti, dipende dal segno della differenza tra le coordinate cartesiane (2.3). Siccome la direzione di OP non cambia perché vincolata all’immobile asse cartesiano, non serve l’indicazione del versore i. Quindi, nei moti rettilinei, al vettore spostamento può essere applicata l’equivalenza OP = x i x (2.4) Il termine x è positivo (negativo) quando lo spostamento è concorde (discorde) al versore i. Per esempio, immaginiamo il punto materiale P in moto dalla posizione di coordinata x(t) = 3 m a quella di coordinata x(t + t) = –8 m (fig. 2.3b): il vettore spostamento OP [( 8 3)m] i (11 m) i possiamo esprimerlo come x = 11 m senza perdere informazioni su modulo, direzione e verso di OP . UNITÀ C2 - MOTI A UNA DIMENSIONE Se il vettore spostamento è infinitesimo l’equivalenza (2.4) diventa d OP dx i dx O i x(t) OP(t) DOP(t) (2.5) Figura 2.3 (a) Vettore spostamento per il moto rettilineo (caso di spostamento positivo). (b) Esempio di equivalenza tra vettore spostamento e differenza tra coordinate cartesiane (i due vettori posizione non sono indicati). x(t + Dt) x OP(t + Dt) a Dx = -11 m DOP(t) b O i x(t + Dt) = -8 m x(t) = 3 m x (m) Infine, nel moto rettilineo, il modulo del vettore spostamento x i tra due punti qualsiasi, è uguale alla distanza compresa tra la coppia di punti, cioè x s (2.6) come mostra la figura 2.4. |Dx| = Ds O x(t) i x(t + Dt) x Vettori velocità Se al vettore spostamento della definizione (1.7a) dell’unità C1, applichiamo l’equivalenza (2.4), la velocità media nel moto rettilineo è completamente descritta dal rapporto x vm t (2.7) Se nella definizione (1.9a) dell’unità C1, applichiamo l’equivalenza (2.5), la velocità è completamente descritta dal rapporto dx v dt (2.8) Le velocità sono positive (negative) quando i relativi vettori hanno verso concorde (discorde) con il versore i. Figura 2.4 A causa della traiettoria coincidente con una retta, nei moti rettilinei non esiste distinzione tra modulo del vettore spostamento e distanza (come invece è evidenziato nella figura 1.12 dell’unità C1). 253 254 MODULO C - CINEMATICA In modo analogo al vettore spostamento, per la variazione del vettore velocità è valida la seguente equivalenza v = v i v (2.9a) e se la variazione è infinitesima, la (2.9a) diventa dv = dv i dv (2.9b) Ricordiamo che il vettore v è il vettore differenza di velocità e il vettore dv è il vettore differenza di velocità infinitesimo. Vettore accelerazione Se al vettore differenza di velocità della definizione (1.10a) dell’unità C1, applichiamo l’equivalenza (2.9a), l’accelerazione media nel moto rettilineo è completamente descritta dal rapporto v am t (2.10) Se nella definizione (1.11a) dell’unità C1, applichiamo l’equivalenza (2.9b), l’accelerazione è completamente descritta dal rapporto dv a dt (2.11) Le accelerazioni sono positive (negative) quando i relativi vettori hanno verso concorde (discorde) al versore i. In modo analogo ai vettori spostamento e velocità, per la variazione del vettore accelerazione è valida la seguente equivalenza a = a i a (2.12a) e se la variazione è infinitesima, la (2.12a) diventa da = da i da (2.12b) Riassumendo: nei moti rettilinei, le grandezze cinematiche vettoriali, posizione, spostamento, velocità e accelerazione si possono esprimere semplicemente con il modulo preceduto dal segno algebrico + (–) che indica il verso concorde (discorde) con il versore dell’asse cartesiano del sistema di riferimento. UNITÀ C2 - MOTI A UNA DIMENSIONE Inoltre il verso del vettore spostamento indica il verso del moto, che è definito positivo (negativo) se è concorde (discorde) con il versore dell’asse cartesiano del sistema di riferimento. Condizioni iniziali del moto Le condizioni iniziali del moto rettilineo sono ovviamente identificate con i valori scalari dei vettori delle grandezze cinematiche. Quindi, ad esempio, per un tempo iniziale t0 = 0 possiamo avere posizione iniziale velocità iniziale x(0) x0 5 m v(0) v0 10 m s 1 accelerazione iniziale a (0) a0 12 m s 2 Diagramma posizione-tempo (diagramma x-t) In figura 2.5 il diagramma posizione-tempo (diagramma x-t) di un punto materiale P in moto rettilineo: in ascissa il tempo e in ordinata la posizione x occupata da P al variare del tempo. L’asse delle ordinate è il sistema di riferimento del moto rettilineo (fig. 2.2a) collocato perpendicolarmente all’asse dei tempi a formare il diagramma. Ogni punto della curva indica in quale istante di tempo t il punto P occupa una determinata posizione x. Rimarchiamo che le posizioni occupate da P si trovano sull’asse delle ordinate e non sulla curva del diagramma: la curva nel diagramma x-t non rappresenta la traiettoria del moto. Figura 2.5 Esempio di diagramma x-t per il moto rettilineo: P parte dalla posizione positiva x0 all’istante t0 = 0, raggiunge la posizione positiva x1 al tempo t1, torna indietro, ripassa di nuovo per x0 al tempo t2, passa per l’origine del sistema di riferimento al tempo t3, e infine raggiunge la posizione negativa x2 al tempo t4 per rimanerci fino all’istante t5. x x1 x0 t3 0 -x2 t1 t2 t4 t5 t 255 256 MODULO C - CINEMATICA Il moto più semplice è il moto rettilineo uniforme, nel quale il corpo percorre uguali tratti di traiettoria in uguali intervalli di tempo. 2.2 Moto rettilineo uniforme Un punto materiale in moto rettilineo uniforme (MRU) percorre una traiettoria rettilinea con vettore velocità costante, cioè v (t ) v (2.13a) La (2.13a) significa che il vettore v è indipendente dal tempo (fig. 2.6). Siccome l’accelerazione è una variazione di velocità rispetto al tempo, e il vettore velocità non varia, nel MRU non esiste vettore accelerazione; quindi a(t ) 0 (2.13b) Essendo il moto rettilineo, esprimiamo la velocità media e scalare rispettivamente nella forma (2.7) e (2.8). Inoltre, per la condizione (2.13a), il modulo di v rimane costante, indipendentemente dal fatto che l’intervallo di tempo rispetto allo spostamento sia t o dt: quindi vm x dx v t dt (2.14) cioè nel moto rettilineo uniforme la velocità media scalare e quella scalare sono uguali e mantengono per tutto il moto lo stesso valore costante. Il segno più (meno) nella (2.14) compare quando il vettore spostamento ha verso concorde (discorde) con il versore dell’asse cartesiano. Quindi la velocità è positiva (negativa) quando il verso del moto è positivo (negativo). Problema svolto 2.1 Un automobilista percorre su un’autostrada rettilinea una distanza x1 = 90 km nel tempo t1 = 1,0 ora con velocità costante v1; successivamente una distanza x2 = 110 km in t2 = 1,5 ore con velocità costante v2. Determinare: 1) le velocità v1 e v2 (in m s–1); 2) la velocità media v sull’intero percorso. 1) Consideriamo l’asse di riferimento x con direzione e verso coincidenti con quelli del moto. Gli spostamenti (e quindi le velocità) hanno segno positivo. UNITÀ C2 - MOTI A UNA DIMENSIONE Determiniamo le velocità v1 e v2 utilizzando la definizione (2.14) v1 v2 x1 90 km 90 103 m 25 m s 1 3600 s t1 1,0 h x2 110 km 110 103 m 20 m s 1 1,5 h 1,5 (3600 s) t2 2) La distanza totale xtot x1 x2 (90 110) km 2, 0 103 km è percorsa nel tempo ttot t1 t2 (1, 0 1,5) ore 2,5 ore La velocità media sull’intero percorso è v xtot 2, 0 102 km km 103 m 80 80 22 m s 1 ttot 2,5 h h 3600 s Diagramma velocità-tempo nel MRU La figura 2.6 evidenzia la relazione (2.13a): una traiettoria rettilinea con punto materiale P in MRU. In ogni istante di tempo, il vettore velocità, per definizione tangente alla traiettoria, ha modulo costante. v(ti) O i P(ti) Il diagramma velocità-tempo (diagramma v-t) di figura 2.7 mostra l’andamento della velocità v rispetto al tempo t nel MRU. Il grafico è costituito dalla semplice funzione (2.13a): una semiretta parallela all’asse dei tempi con un generico valore di velocità costante v0 in ordinata. v(tj) Figura 2.6 Nel MRU, in qualsiasi istante di tempo, il punto materiale P è soggetto al medesimo vettore velocità v (in figura il verso del moto è ipotizzato positivo). v(tk) P(tj) P(tk) x Figura 2.7 Diagramma v-t nel MRU con velocità costante v0 (il tempo iniziale è t = 0). v v0 0 t Legge oraria e diagramma distanza-tempo nel MRU Supponiamo il punto materiale P in MRU con posizione iniziale x(t0) e posizione x(t) nell’istante t. Siccome lo spostamento coincide con la distanza percorsa, cioè x x(t ) x(t0 ) s (t ) s0 257 258 MODULO C - CINEMATICA possiamo scrivere la (2.14) come v s (t ) s0 t t0 (2.15) Isoliamo s(t) per ottenere la legge oraria del MRU s (t ) v(t t0 ) s0 (2.16a) Se poniamo t0 = 0, la legge diventa s (t ) v t s0 (2.16b) e se per t0 = 0, s0 = 0, la legge si semplifica ulteriormente come s (t ) v t Figura 2.8 Diagramma s-t con posizione iniziale s0 per t = 0. Il coefficiente angolare m della semiretta è uguale alla velocità v. Ricordiamo che m è uguale alla tangente dell’angolo che la retta forma con l’asse delle ascisse (m = tan ). s s0 0 a t (2.16c) Dalla geometria analitica le (2.16) sono equazioni di una retta con coefficiente angolare uguale alla velocità (vedere fig. 2.4, modulo A2). In figura 2.8 il diagramma s-t con la retta relativa alla (2.16b); per quella relativa alla (2.16c) basta spostare parallelamente la retta verso il basso in modo che s0 = 0. Problema svolto 2.2 Paolo e Franco partono dagli estremi di un corridoio lungo 20 m e si muovono l’uno verso l’altro, rispettivamente, con velocità costanti di 4,5 m s–1 e 5,5 m s–1. 1) Tracciare il grafico posizione-tempo dei moti di Paolo e Franco. 2) Determinare dopo quanto tempo dall’istante di partenza, Paolo e Franco s’incontrano. 1) Poniamo l’asse di riferimento x con origine nel punto iniziale del moto di Paolo e con direzione e verso coincidenti con quelli del suo moto. Lo spostamento e, quindi, la velocità di Paolo hanno segno positivo. Lo spostamento di Franco è invece negativo perché il vettore spostamento è discorde rispetto al versore dell’asse x; di conseguenza anche la velocità è negativa. Le condizioni iniziali sono quindi x0P 0, 00 m x0F 20 m v0P 4,5 m s 1 v0F 5,5 m s 1 UNITÀ C2 - MOTI A UNA DIMENSIONE In figura 2.9, il diagramma x-t con i moti di Paolo e Franco rappresentati da due semirette: quella relativa al moto di Paolo è una semiretta uscente dall’origine degli assi con pendenza positiva; quella relativa al moto di Franco è una semiretta che parte dal punto di ordinata 20 m con pendenza negativa. x (m) 20 15 2) Scriviamo le leggi orarie del due moti utilizzando la (2.16c) per Paolo e la (2.16b) per Franco xP vP t (1) xF x0F vF t (2) P 10 5,0 F 1,0 L’istante in cui s’incontrano è quando le posizioni di Paolo e Franco coincidono, cioè 2,0 3,0 4,0 t (s) Figura 2.9 xP xF Perciò, sostituiamo con la (1) e la (2) vP t x0F vF t da cui t x0F 20 m 2, 0 s 1 vP vF 4,5 m s (5,5 m s 1 ) In figura 2.10 il diagramma s-t per due punti materiali, A e B, ipotizzati in moto con le leggi orarie (2.16c) s (t ) vA t e A s (t ) vB t La pendenza più accentuata della retta relativa al punto materiale A comporta un coefficiente angolare maggiore di quello relativo al punto materiale B, e dunque vA vB Figura 2.10 Diagramma s-t per due punti materiali (per t = 0, s0 = 0). s v A > vB B 0 t Determinazione della distanza dal diagramma velocità-tempo Riportiamo in figura 2.11a il diagramma v-t di figura 2.7: la legge oraria del punto materiale con velocità rappresentata dal diagramma è la (2.16c) s (t ) v0 t Se desideriamo conoscere la distanza percorsa al generico istante ti dobbiamo calcolare il prodotto s (ti ) v0 ti equivalente all’area del rettangolo di altezza v0 e base ti della figura. Se il tempo iniziale è diverso da zero, la base del rettangolo diventa il segmento di ascissa compreso tra t0 e ti (fig. 2.11b). 259 260 MODULO C - CINEMATICA Grazie al calcolo integrale (unità A2, par. 2.2, fig. 2.15) il metodo grafico descritto ha validità generale, qualsiasi sia l’andamento della curva nel diagramma v-t e, dunque, qualsiasi sia il tipo di moto. Adotteremo di nuovo questo metodo nel prossimo paragrafo (vedere fig. 2.17). Figura 2.11 Metodo grafico per la determinazione della distanza dal diagramma v-t: (a) con t0 = 0; (b) con t0 ≠ 0. a v v v0 v0 0 t ti b 0 t0 t ti MRU a tratti Nel moto rettilineo uniforme a tratti il punto materiale percorre tratti di traiettoria, ciascuno a velocità diversa. L’analisi della cinematica deve quindi essere spezzata nel numero di tratti a velocità costante, e trattare il singolo tratto come se fosse un MRU indipendente dagli altri. Per il MRU a tratti è indispensabile il diagramma posizione-tempo (diagramma x-t) che indica la coordinata dell’asse x occupata dal punto materiale al variare del tempo (attenzione a non confonderlo con il diagramma s-t). Consideriamo l’esempio di MRU a tratti di figura 2.12 con diagramma x-t con asse delle ordinate la traiettoria del punto materiale P, e il diagramma v-t; i tratti a velocità costante sono indicati dalle lettere a, b, c, d. Figura 2.12 Esempio di MRU a tratti: (a) diagramma x-t; (b) diagramma v-t. x b x1 a c t3 t4 O t1 t5 t t2 d x2 a x va vd vb O -vc b a d b t1 t2 t4 t5 t c Analizziamo ogni tratto singolarmente seguendo il moto di P sulla traiettoria insieme all’andamento dei diagrammi. UNITÀ C2 - MOTI A UNA DIMENSIONE tratto a P parte da x0 = 0 all’istante t0 = 0 e, con moto di verso positivo, raggiunge x1 al tempo t1; per la (2.15) la velocità va è va x1 x0 t1 t0 Essendo x1 > x0, va > 0 come conferma la pendenza positiva del tratto e l’ascissa positiva del diagramma v-t. tratto b P rimane fermo a x1 dall’istante t1 fino all’istante t2; la velocità vb è vb x1 x1 0 t2 t1 come conferma la pendenza orizzontale del tratto e l’ascissa pari a 0 nel diagramma v-t. tratto c P riparte da x1 all’istante t2 e, con moto di verso negativo, ripassa in O all’istante t3 e raggiunge la coordinata negativa x2 all’istante t4; la velocità vc è vc x2 x1 t4 t2 Essendo x2 < 0 e x1 > 0, vc risulta minore di 0, come conferma la pendenza negativa del tratto e l’ascissa negativa del diagramma v-t. tratto d All’istante t4 il punto P, che si trova in x2, inverte il verso del moto che diventa di nuovo positivo e raggiunge x0 all’istante t5; la velocità vd è vd x0 x2 t5 t 4 ed essendo x0 > x2, risulta vd > 0. Dal precedente esempio deduciamo che: i tratti del diagramma x-t a pendenza negativa sono relativi a moti con verso negativo e, di conseguenza, la velocità in quei tratti è negativa. il diagramma v-t è una spezzata di segmenti paralleli all’asse x a conferma che in ogni tratto è MRU. i valori in valore assoluto delle velocità sono uguali ai valori assoluti dei coefficienti angolari (m) dei segmenti nel diagramma x-t: quindi, maggiore è la pendenza del segmento, maggiore è il modulo del vettore velocità; confrontando i diagrammi del precedente esempio abbiamo infatti m c vc ma va md vd mb vb 261 262 MODULO C - CINEMATICA Complichiamo il moto rettilineo descritto nel paragrafo precedente variando la velocità, in modo che si abbia in ogni istante del moto un’accelerazione costante. 2.3 Moto rettilineo uniformemente accelerato Un punto materiale in moto rettilineo uniformemente accelerato (MRUA) percorre una traiettoria rettilinea con vettore accelerazione costante, cioè a(t ) a (2.17) La (2.17) significa che il vettore a è indipendente dal tempo (fig. 2.13). Siccome per definizione, l’accelerazione è causata da una variazione di velocità, il vettore velocità nel MRUA è un vettore variabile. Essendo il moto rettilineo, esprimiamo l’accelerazione media e scalare rispettivamente nella forma (2.10) e (2.11). Inoltre, per la condizione (2.17), il modulo di a rimane costante, indipendentemente dal fatto che l’intervallo di tempo rispetto allo spostamento sia t o dt; quindi am v dv a t dt (2.18) cioè nel moto rettilineo uniformemente accelerato, l’accelerazione media scalare e quella scalare sono uguali e mantengono per tutto il moto lo stesso valore costante. Il segno algebrico dell’accelerazione dipende dal verso del moto e dalla variazione del modulo del vettore velocità, come andiamo a descrivere applicando la (2.18). Verso del moto positivo (velocità sempre positiva) - in caso di aumento del modulo di v: v > 0 e quindi a > 0. - in caso di diminuzione del modulo di v: v < 0 e quindi a < 0. Verso del moto negativo (velocità sempre negativa) - in caso di aumento del modulo di v: v < 0 e quindi a < 0. - in caso di diminuzione del modulo di v: v > 0 e quindi a > 0. Quando il modulo del vettore velocità v diminuisce, l’accelerazione è definita decelerazione. Come esempio può essere utile il moto dell’automobile considerando il pedale dell’acceleratore e il tachimetro che segna la velocità; supponendo una strada rettilinea e verso del moto positivo, si ha UNITÀ C2 - MOTI A UNA DIMENSIONE a > 0 quando si pigia il pedale (tachimetro in aumento, accelerazione); a < 0 quando si alza il pedale (tachimetro in diminuzione, decelerazione); a = 0 quando si tiene il pedale al medesimo livello (tachimetro costante, nessuna accelerazione). Problema svolto 2.3 Un automobilista viaggia alla velocità costante di 90 km/h su una strada diritta. Vede in lontananza un camion fermo che sbarra la strada e, dunque, frena fino a fermarsi con accelerazione costante di modulo 3,5 m s–2. Determinare quanto tempo impiega l’automobilista a fermarsi. Consideriamo l’asse di riferimento x con direzione e verso coincidenti con quelli del moto dell’automobilista. Gli spostamenti e quindi le velocità hanno segno positivo. Siccome l’accelerazione è costante, applichiamo la (2.18). Determiniamo la variazione di velocità v (0 90) km h 1 90 km h 1 Siccome la variazione è negativa, l’accelerazione è negativa, cioè a 3,5 m s 2 Quindi, dalla (2.16b), il tempo impiegato a bloccare l’auto è t 1 v 90 km h 3,5 m s 2 a 90 103 m 3600 s 2 7,1 s 3,5 m s Diagrammi accelerazione-tempo e velocità-tempo nel MRUA Lo figura 2.13 evidenzia la relazione (2.17): una traiettoria rettilinea dove il punto materiale P è in MRUA. In qualsiasi istante di tempo il vettore accelerazione ha modulo costante. a(ti) O i P(ti) a(tj) P(tj) a(tk) P(tk) x Figura 2.13 Nel MRUA, in qualsiasi istante di tempo, il punto materiale P è soggetto al medesimo vettore accelerazione a (in figura, verso del moto e variazione di velocità sono ipotizzati positivi). 263 264 MODULO C - CINEMATICA Figura 2.14 Diagramma a-t nel MRUA con accelerazione costante a0 (il tempo iniziale è t = 0). Il diagramma accelerazione-tempo (diagramma a-t) di figura 2.14 mostra l’andamento dell’accelerazione a rispetto al tempo t nel MRUA. Il grafico è costruito dalla semplice funzione (2.17): una semiretta parallela all’asse dei tempi con in ordinata un generico valore di accelerazione costante a0. a a0 t 0 Supponiamo il punto materiale P in MRUA con velocità iniziale v(t0) e velocità nell’istante t, v(t). Quindi la (2.18) possiamo scriverla come a v(t ) v0 t t0 (2.19) Isoliamo v(t) e otteniamo la relazione della velocità in funzione del tempo nel MRUA v(t ) a (t t0 ) v0 (2.20) Se poniamo t0 = 0, la (2.20) diventa v(t ) a t v0 (2.21a) e se per t0 = 0 la velocità iniziale è v0 = 0, la (2.21a) si semplifica ulteriormente come v(t ) a t (2.21b) Figura 2.15 Diagramma v-t con posizione iniziale, per t = 0, v0 = 0 ed v0 ≠ 0. Il coefficiente angolare m della semiretta è uguale all’accelerazione a. Ricordiamo che m è uguale alla tangente dell’angolo che la retta forma con l’asse delle ascisse. Dalla geometria analitica la (2.21a) è l’equazione di una retta con coefficiente angolare uguale all’accelerazione (vedere fig. 2.4, modulo A2). In figura 2.15 il diagramma v-t con le semirette relative alla (2.21a) e alla (2.21b). v v0 a a t 0 In figura 2.16 il diagramma v-t per due punti materiali, A e B, che ipotizziamo in moto con le relazioni (2.21b) v(t ) aA t Figura 2.16 Diagramma v-t per due punti materiali (per t = 0, v0 = 0). v e v(t ) aB t La pendenza più accentuata della retta relativa al punto materiale A comporta un coefficiente angolare maggiore di quello relativo al punto materiale B, e dunque A B aA aB 0 t UNITÀ C2 - MOTI A UNA DIMENSIONE Grazie alla (2.21b), dal diagramma a-t di figura 2.14 è possibile determinare la velocità del punto materiale in un certo istante t calcolando l’area del rettangolo di base t e altezza a0. Questo metodo grafico è analogo a quello svolto in figura 2.11 per la distanza s dal diagramma v-t nel MRU. Nel MRU, la distanza percorsa è uguale all’area sottesa dalla semiretta del diagramma v-t (fig. 2.11). Questo metodo è consentito dal calcolo integrale (unità A2, par. 2.2, fig. 2.16) ed è valido per un qualsiasi andamento della funzione v(t). Lo applichiamo quindi al diagramma v-t di figura 2.17 per determinare la legge oraria del MRUA. Supponiamo una velocità iniziale per t = 0 di v(0) = v0. Determiniamo la distanza percorsa dal punto materiale al generico istante t dove la velocità raggiunta è v (vedere diagramma). L’area sottesa dalla retta è la somma dell’area del rettangolo di base t e altezza v0 velocità Legge oraria e diagramma distanza-tempo nel MRUA area = v0 area = v0 t 0 v0 t 1 (v - v0) t 2 tempo t Figura 2.17 Metodo grafico per la determinazione della legge oraria del MRUA. e l’area del triangolo di base t e altezza v 1 v v0 t 2 Quindi la distanza percorsa è la somma delle aree s (t ) 1 v v0 t v0 t 2 Sapendo dalla (2.21a) che (v – v0) = a t, possiamo scrivere s (t ) 1 2 a t v0 t 2 (2.22) Se all’istante iniziale t = 0 il punto materiale ha già percorso la distanza s0, occorre aggiungere la distanza alla precedente relazione: otteniamo quindi la legge oraria nella sua forma più generale s (t ) 1 2 a t v0 t s0 2 s (2.23) In figura 2.18, il diagramma s-t relativo alla legge oraria (2.23): è una porzione di parabola, essendo la funzione di secondo grado rispetto al tempo. 0 t Figura 2.18 Diagramma s-t con posizione iniziale s0 = 0 per t = 0. 265 266 MODULO C - CINEMATICA Problema svolto 2.4 La figura 2.19 mostra il diagramma velocità-tempo di un’automobile in moto per 8,0 s su un rettilineo. Determinare 1) il tipo di moto; 2) l’accelerazione; 3) la distanza percorsa dall’automobile. v (m s-1) C 20 B 15 10 5,0 A 4,0 2,0 6,0 8,0 t (s) Figura 2.19 1) Il diagramma velocità-tempo è una retta, quindi il moto si svolge con accelerazione costante. Poiché la retta passa per l’origine, nell’istante iniziale del moto l’automobile è ferma, cioè v0 0, 00 m s 1 2) L’accelerazione dell’automobile è il coefficiente angolare della retta. Consideriamo quindi due generici punti della retta, A = (tA, vA) = (2,0 s, 5,0 m s–1) e B = (tB, vB) = (6,0 s, 15 m s–1) e poniamo a rapporto le differenze delle coordinate omogenee per ottenere la (2.19) a vB vA (15 5, 0) m s 1 2,5 m s 2 (6, 0 2, 0) s tB tA 3) La distanza percorsa dall’automobile in 8,0 s è uguale all’area del triangolo rettangolo di base tC = 8,0 s e altezza vC = 20 m s–1 s 1 1 tC vC (8, 0 s)(20 m s 1 ) 80 m 2 2 dove abbiamo applicato il metodo descritto in figura 1.17 (vedere area triangolo). Velocità in funzione della distanza nel MRUA Con semplici passaggi matematici è possibile esprimere la velocità in funzione della distanza s percorsa senza necessariamente conoscere il tempo. Eleviamo al quadrato entrambi i membri della (2.20) v 2 = a t v0 2 UNITÀ C2 - MOTI A UNA DIMENSIONE Sviluppando il quadrato del binomio di destra e con qualche passaggio, otteniamo t2 v 2 v02 2a v0 t a 2 Il termine tra parentesi è la relazione (2.22) e dunque v 2 v02 2 a s Se all’istante iniziale t = 0 il punto materiale ha già percorso la distanza s0, la distanza effettiva percorsa è (s – s0) e la relazione diventa v 2 v02 2a ( s s0 ) (2.24a) ponendo sotto radice entrambi i membri otteniamo la relazione finale v v02 2a ( s s0 ) (2.24b) utile in parecchie applicazioni. MRUA a tratti Nel moto rettilineo uniformemente accelerato a tratti il punto materiale percorre tratti di traiettoria, ciascuno ad accelerazione diversa. L’analisi della cinematica deve quindi essere spezzata nel numero di tratti ad accelerazione costante, e trattare il singolo tratto come se fosse un moto indipendente dagli altri. Consideriamo l’esempio di MRUA a tratti rappresentato in figura 2.20 con il diagramma v-t e il diagramma a-t; i tratti ad accelerazione costante sono indicati dalle lettere a, b, c. Figura 2.20 Esempio di MRUA: (a) diagramma v-t; (b) diagramma a-t. v v1 b a c v0 t3 0 t1 -v2 t4 t t2 a a a t1 b t2 t3 0 t c b t4 267 268 MODULO C - CINEMATICA Analizziamo ogni tratto singolarmente seguendo il moto di P sulla traiettoria insieme all’andamento dei diagrammi. tratto a P parte all’istante t0 = 0, con velocità iniziale v0 e aumentando la velocità raggiunge la velocità v1 all’istante t1; per la (2.19) l’accelerazione aa è aa v1 v0 t1 t0 Essendo v1 > v0, risulta aa > 0, come conferma la pendenza positiva del tratto e l’ascissa positiva del diagramma a-t. tratto b P è in MRU dall’istante t2 fino all’istante t3 con velocità costante v1; l’accelerazione ab è ab v1 v1 0 t2 t1 come conferma la pendenza orizzontale del tratto e l’ascissa 0 del diagramma a-t. tratto c Tra t2 e t3, P è in decelerazione (il valore di v è in diminuzione), con verso del moto positivo (v > 0). Al tempo t3 la velocità si annulla e P inverte il verso del moto. Tra t3 e t4, P è sempre in decelerazione e il verso del moto diventa negativo (v < 0) fino a raggiungere la velocità v2; l’accelerazione ac è ac v2 v1 t4 t2 Essendo v2 < 0 e v1 > 0, risulta ac < 0, come conferma la pendenza negativa del tratto e l’ascissa negativa del diagramma a-t. Dal precedente esempio deduciamo che: il diagramma a-t è una spezzata di segmenti paralleli all’asse x, a conferma che in ogni tratto si tratta di un MRUA. i valori in valore assoluto delle accelerazioni sono uguali ai valori assoluti dei coefficienti angolari (m) dei segmenti nel diagramma v-t: quindi maggiore è la pendenza del segmento, maggiore è il modulo del vettore accelerazione nel tratto; confrontando i diagrammi del precedente esempio abbiamo infatti ma aa mc ac mb ab UNITÀ C2 - MOTI A UNA DIMENSIONE I corpi che cadono al suolo a causa dell’attrazione gravitazionale della Terra hanno moto rettilineo uniformemente accelerato. 2.4 Moto in caduta libera Galileo Galilei studiò il moto dei gravi, cioè la cinematica dei corpi lasciati cadere da una certa altezza, e dimostrò che Figura 2.21 Foto stroboscopia che ritrae istante per istante la caduta nel vuoto di due corpi di massa diversa; i due corpi sono lasciati cadere nel medesimo istante. in assenza d’aria, tutti i corpi, di qualsiasi massa e dimensione, cadono con la medesima accelerazione costante, con traiettoria perpendicolare al suolo. La condizione assenza d’aria significa che non compare la forza d’attrito generata dallo sfregamento del corpo con le molecole dell’aria, condizione che si realizza facendo cadere il corpo in un recipiente dove all’interno è creato il vuoto. In figura 2.21 il classico esperimento che prova quanto affermato da Galilei. Due corpi di massa diversa, lasciati cadere simultaneamente dalla medesima altezza nel vuoto, assumono posizioni via via uguali e giungono sul fondo del recipiente nel medesimo istante. La forza peso unica responsabile della caduta libera La causa del moto in caduta libera è la forza peso agente sul corpo. L’effetto della forza peso si manifesta con l’accelerazione di gravità con cui il corpo cade (par. 2.1, unità B1). Ipotizzando assenza d’aria, e dunque assenza d’attrito, diamo le seguenti definizioni: un punto materiale è in caduta libera quando è sottoposto alla sola forza peso; l’effetto della forza peso è un moto rettilineo uniformemente accelerato, con accelerazione uguale all’accelerazione di gravità. ag (2.25) che ha modulo g = 9,81 m/s2. Il termine “caduta” non necessariamente implica un moto del punto materiale verso il basso. La caduta libera è un qualsiasi moto in cui il punto materiale è soggetto solo alla forza peso. Se per esempio lanciamo una palla verso il basso o verso l’alto, la palla è comunque in caduta libera non appena lascia la mano. Studiamo la cinematica della caduta libera in due differenti condizioni iniziali: il corpo lasciato cadere da fermo, e il corpo lanciato verticalmente. 269 270 MODULO C - CINEMATICA Caduta libera da fermo Figura 2.22 Sistema di riferimento per la caduta libera da fermo. Immaginiamo di lasciare cadere da fermo un oggetto da una certa altezx0 0 g za dal suolo (per esempio dalla cima i di un palazzo). La specificazione “da fermo” significa che il corpo inizia a muoversi verso il basso nel momento che lo lasciamo con la mano e dunque con velocità iniziale nulla. In figura 2.22 il sistema di riferimento: l’asse x ha direzione perpendicox suolo lare al suolo e, per facilitare l’analisi, con verso rivolto al suolo in modo che il moto sia di verso positivo. L’origine è coincidente con il punto di rilascio del punto materiale P su cui agisce la forza peso, in figura rappresentata dall’effetto vettore accelerazione gg i Impostiamo le condizioni iniziali del moto per t0 = 0: la posizione e la velocità iniziali sono (2.26a) x0 0 v0 0 (2.26b) Il moto è rettilineo uniformemente accelerato: le grandezze cinematiche sono dunque espresse dalle funzioni del paragrafo 2.3, con la generica accelerazione a sostituita da quella di gravità g e considerando le condizioni iniziali (2.26). Per come è collocato il sistema di riferimento, la posizione x(t) coincide con la distanza percorsa s(t) e, dunque, dalla funzione (2.23) x(t ) 1 2 gt 2 (2.27) La velocità è espressa dalla funzione (2.21a) v(t ) g t (2.28) o dalla funzione rispetto la posizione x (2.24) v( x) 2 g x (2.29) Tempo di caduta e velocità d’impatto Conoscendo l’altezza h rispetto al suolo da cui il punto materiale è lasciato cadere, è possibile conoscere i seguenti intervallo di tempo e velocità tempo di caduta th impiegato da P per raggiungere il suolo: dalla (2.27) ponendo x(t) = h e isolando il tempo, si ottiene th 2h g (2.30) UNITÀ C2 - MOTI A UNA DIMENSIONE velocità d’impatto vf con cui P tocca il suolo: dalla (2.29) ponendo x = h, si ottiene vf 2 g h (2.31) Problema svolto 2.5 Un sasso è lasciato cadere dall’alto della Torre Eiffel (h = 3,0 · 102 m). Trascurando la resistenza dell’aria, determinare la durata della caduta e la velocità con cui il sasso colpisce il suolo. Consideriamo come sistema di riferimento un asse x con origine coincidente con il punto di rilascio del sasso e diretto perpendicolarmente verso il suolo. Poiché il sasso parte da fermo, le condizioni iniziali sono v0 0, 00 m s 1 x0 0, 00 m Calcoliamo il tempo di caduta con la (2.30) th 2 (3,0 102 m) 7,8 s 9,81 m s 2 e la velocità di impatto con la (2.31) vf 2 (9,81 m s 2 ) (3,0 102 m) 77 m s 1 Caduta libera con lancio verticale Immaginiamo di lanciare in verticale un oggetto da una certa altezza dal suolo (per esempio dalla cima del solito palazzo). In questo caso, a causa del lancio, il corpo assume una velocità iniziale con vettore rivolto verso l’alto. x xmax In figura 2.23 il sistema di riferimento: l’asse x ha direzione perpendicolare al suolo, con verso rivolto in alto in modo che il vettore velocità iniziale abbia modulo positivo, cioè i 0 Figura 2.23 Sistema di riferimento per la caduta libera con lancio verticale. v=0 v0 g x0 suolo v 0 v0 i L’origine è coincidente con il punto di lancio del punto materiale P su cui agisce la forza peso in figura rappresentata dall’effetto vettore accelerazione, in questo caso con verso opposto al versore; quindi g g i 271 272 MODULO C - CINEMATICA Impostiamo le condizioni iniziali del moto per t0 = 0: la posizione e la velocità iniziali sono x0 0 (2.32a) v0 v0 (2.32b) Il moto è di nuovo rettilineo uniformemente accelerato: le grandezze cinematiche sono dunque espresse dalle funzioni del paragrafo 2.3, con la generica accelerazione a sostituita da quella di gravità con segno negativo, –g, e con le condizioni iniziali definite dalla (2.32). Dalla funzione (2.23) ricaviamo: x(t ) 1 ( g ) t 2 v0 t 2 (2.33) La velocità è espressa dalla funzione (2.21a) v(t ) ( g ) t v0 (2.34) oppure, rispetto alla posizione x, dalla (2.24) v( x) v02 2 g x (2.35) Nel caso di lancio verticale verso il basso è consigliabile prendere l’asse cartesiano rivolto verso il basso e considerare l’accelerazione di gravità con segno positivo. Tempo di salita e quota massima Quando il corpo è lanciato verso l’alto, la sua velocità diminuisce fino ad annullarsi all’apice xmax della salita (fig. 2.23), dove v = 0. Questa osservazione consente di conoscere i seguenti intervallo di tempo e posizione tempo di salita ts (impiegato da P per raggiungere xmax), ottenuto dalla (2.34) ponendo v = 0: 0 ( g ) ts v0 da cui ts v0 g (2.36) quota massima xmax raggiunta da P, ottenuta dalla (2.35) ponendo v = 0 (0) 2 2 ( g ) xmax v02 da cui xmax v02 2g (2.37) UNITÀ C2 - MOTI A UNA DIMENSIONE Problema svolto 2.6 Una palla è lanciata verticalmente verso l’alto con una velocità iniziale di 5,0 m s–1 per poi essere ripresa quando ricade. Trascurando la resistenza dell’aria, determinare a quale altezza massima arriva la palla e quanto tempo impiega la palla a raggiungere l’altezza massima e tornare al punto di lancio. Calcoliamo la quota raggiunta dalla palla applicando la (2.37) xmax (5,0 m s 1 ) 2 1,3 m 2 (9,81 m s 2 ) Il tempo di salita è dato dalla (2.36) ts 5, 0 m s 1 0,51 s 9,81 m s 2 La palla ricade con la stessa accelerazione (in valore assoluto), ripassa da ogni punto con la stessa velocità e torna al punto di partenza nello stesso tempo impiegato per la salita. Il tempo t impiegato dalla palla per tornare al punto di lancio è perciò t 2ts 1, 0 s Il moto armonico è un esempio di moto vario, dove né la velocità, né l’accelerazione sono costanti, come invece lo sono nel MRU e nel MRUA. 2.5 Moto armonico Figura 2.24 Pendolo di un orologio. Un moto molto comune è quello oscillatorio che osserviamo, per esempio, nel movimento di un’altalena o di un pendolo per orologio (fig. 2.24): il corpo oscilla avanti e indietro, percorrendo i medesimi punti dello spazio, tracciando quindi una traiettoria limitata nello spazio. Il più semplice tra i moti oscillatori è un moto rettilineo, chiamato moto armonico. Nel moto armonico il punto materiale percorre un segmento rettilineo dove tocca a intervalli uguali di tempo i medesimi punti della traiettoria senza mai uscire dagli estremi del segmento. Figura 2.25 Sistema di riferimento del moto armonico. La figura 2.25 mostra il sistema di riferimento del moto armonico: il segmento-traiettoria è posizionato con gli estremi, A e –A, equidistanti dall’origine O. Gli estremi A e –A sono i punti di inversione del moto; infatti, il punto materiale P, una volta raggiunto un estremo del segmento, inverte il moto e torna indietro per ripercorrere la traiettoria fino all’estremo opposto. -A i O A x 273 274 MODULO C - CINEMATICA Il punto O, definito centro di oscillazione, è scelto come posizione iniziale per t = 0. La distanza A è definita ampiezza di oscillazione; il motivo del termine è chiaro osservando la figura 2.29a. Esempi di moto armonico Analizziamo due esempi di moto armonico, dove è possibile osservare il moto di oscillazione tra gli estremi A e –A del segmento-traiettoria. Moto armonico con molla In figura 2.26, un corpo C è vincolato a una molla ed è posizionato nell’istante iniziale al centro di oscillazione O. Se si tira la molla verso l’estremo A o la si spinge verso l’estremo –A, a causa della forza elastica della molla (unità B1, par. 1.3, fig. 1.9), s’innesca una oscillazione del corpo tra i due punti di inversione. Figura 2.26 Un corpo sollecitato dalla forza elastica di una molla compie un moto armonico. C O i -A A x Moto armonico come proiezione durante moto circolare Figura 2.27 La proiezione di un corpo sul diametro della sua traiettoria circolare compie un moto armonico. In figura 2.27 un corpo C è in moto lungo una circonferenza a velocità scalare costante: la proiezione P del corpo sul diametro della circonferenza oscilla tra i punti di inversione A e –A. C P -A i O P A x Ritorneremo su questo esempio in modo approfondito nel paragrafo 3.5 della prossima unità. Parametri del moto armonico Nel moto armonico si ha oscillazione completa quando il punto materiale P parte da un qualsiasi punto della traiettoria-segmento e ritorna al medesimo punto, dopo che ha percorso tutti i punti del segmento. Per esempio, un’oscillazione completa avviene quando P parte da O, tocca A, inverte il moto, tocca –A e conclude in O (vedere fig. 2.26 e fig. 2.27). UNITÀ C2 - MOTI A UNA DIMENSIONE Definita l’oscillazione completa, possiamo introdurre le seguenti tre grandezze fisiche scalari indispensabili per la cinematica del moto armonico periodo T: intervallo di tempo impiegato dal punto materiale a compiere un’oscillazione completa. frequenza f: numero di oscillazioni complete compiute dal punto materiale in un secondo; è il reciproco del periodo T f 1 T (2.38) L’unità di misura della frequenza è l’hertz (Hz) oppure 1/s. Un hertz equivale a una frequenza in cui l’oscillazione completa si compie in un secondo. pulsazione : grandezza fisica scalare definita come 2 f 2 T (2.39) L’unità di misura è il radiante al secondo (rad/s). Il radiante è un unità di misura dell’ampiezza di un angolo (unità A2, par. 2.3, fig. 2.19b). La (2.39) sarà dimostrata nel paragrafo 3.4 della prossima unità. Diagramma posizione-tempo nel moto armonico Il sistema di figura 2.28 aiuta a comprende l’andamento della posizione del punto materiale in moto armonico durante una sua oscillazione. Lo scorrimento orizzontale della striscia di carta durante l’oscillazione verticale della molla simula il passare del tempo. Osserviamo che la curva tracciata è una sinusoide (unità A2, par. 2.3, fig. 2.22). Quindi la posizione occupata dal punto materiale durante il moto armonico è una funzione sinusoidale. Figura 2.28 Oscillazione verticale di una molla appesa per il tracciamento della funzione (2.40). 275 276 MODULO C - CINEMATICA Sia il punto materiale P in moto armonico con frequenza f: la posizione x(t) di P al variare del tempo t è la funzione sinusoidale x(t ) A sen t Figura 2.29 (a) Diagramma x-t per il moto armonico (per t = 0, x0 = 0). (b) Diagramma v-t. (c) Diagramma a-t. (2.40) dove la pulsazione è data dalla (2.39) e A è l’ampiezza dell’oscillazione. La figura 2.29a mostra l’andamento sinusoidale della (2.40) per un intervallo di tempo uguale al periodo T. x v a A Aw Aw 2 0 -A 0 t T 4 T 2 3 T 4 -Aw T a t T 4 T 2 3 T 4 0 -Aw 2 T b t T 4 T 2 3 T 4 T c Moto armonico come esempio di moto vario Un moto è definito vario quando i vettori velocità e accelerazione non sono costanti nel tempo. Dimostriamo che il moto armonico è un esempio di moto vario, descrivendo gli andamenti della velocità e dell’accelerazione per un punto materiale che occupa la coordinata x(t) secondo la funzione (2.40). Velocità La figura 2.29b mostra l’andamento della velocità durante un oscillazione completa; il grafico è descritto dalla funzione coseno di ampiezza A v(t ) A cos t (2.41a) Confrontiamo il grafico con quello di figura 2.29a: negli intervalli in cui la velocità è positiva (negativa) il moto di P ha verso positivo (negativo). il modulo del vettore v è massimo nel centro di oscillazione, con vmax A (2.42b) ed è nullo nei punti di inversione del moto, cioè nei punti in cui s’inverte il verso del moto. UNITÀ C2 - MOTI A UNA DIMENSIONE Accelerazione La figura 2.29c mostra l’andamento dell’accelerazione durante un oscillazione completa; il grafico è descritto dalla funzione seno di ampiezza A2 a (t ) A 2 sen t (2.43a) Confrontiamo il grafico con quelli di figure 2.29a e b: l’accelerazione è positiva (negativa) quando il punto materiale occupa coordinate negative (positive); in altri termini il vettore a ha verso sempre rivolto al centro di oscillazione. il modulo del vettore a è massimo nei punti d’inversione, con amax A 2 (2.43b) infatti i punti d’inversione sono quelli in cui è massima la variazione della velocità; il modulo è nullo nel centro di oscillazione. Le dimostrazioni delle relazioni (2.42b) e (2.43b) saranno spiegate nel paragrafo 3.5 dell’unità C3. Le funzioni x(t), v(t) e a(t) del moto armonico saranno ulteriormente commentate nell’approfondimento di questa unità. Problema svolto 2.7 Una massa fissata a una molla oscilla cinque volte in un secondo con moto armonico, tra due posizioni distanti 8 cm. Determinare il periodo del moto, la frequenza, la pulsazione e l’ampiezza. Scrivere la funzione posizione del moto. Poiché la molla compie cinque oscillazioni in un secondo, il periodo T è T 1s 0, 2 s 5 La frequenza è dalla (2.38) f 1 1 5 Hz T 0, 2 s e la pulsazione è dalla (2.39) 2 (5 Hz) 3 10 rad s 1 L’ampiezza, per definizione, è la metà della distanza tra i due punti di inversione di moto, e dunque è 8 cm 4 cm 2 Per la funzione posizione occorre sostituire i dati nella funzione (2.40): quindi x(t ) A sen t (0,4 m ) sen (3 10 rad s 1 ) t 277 278 MODULO C - CINEMATICA APPROFONDIMENTO Velocità e accelerazione nel moto rettilineo vario Velocità media e velocità nel MRV Nei moti rettilinei uniformi a tratti, la determinazione della velocità e accelerazione è semplice: la velocità è il coefficiente angolare del segmento che esprime la variazione di posizione (fig. 2.12) e l’accelerazione è il coefficiente angolare del segmento che esprime la variazione di velocità (fig. 2.20). Situazione diversa per il moto rettilineo vario (MRV), dove la variazione della posizione rispetto al tempo nel diagramma posizione-tempo non è rappresentata da una retta, ma da una generica curva come succede per il moto armonico (fig. 2.29a). Consideriamo il diagramma x-t di figura 2.30 con tracciata una generica curva (non rettilinea) descritta dalla funzione x f (t ) Andiamo a ricavare la velocità media e la velocità. Velocità media Deduciamo dal grafico la velocità media rispetto a un generico intervallo di tempo Nel moto rettilineo vario il diagramma posizione-tempo mostra un andamento non lineare. t (ti t ) ti Come conseguenza Dalla (2.7) che riproponiamo nel moto rettilineo vario la velocità e l’accelerazione sono entrambe grandezze fisiche variabili nel tempo. x vm t Di conseguenza per dedurre la velocità (l’accelerazione) occorre valutare la pendenza della retta tangente punto per punto della curva del diagramma x-t (diagramma a-t). Il metodo è descritto nell’unità A2, paragrafo 2.2, dedicato al concetto di derivata (fig. 2.13) che invitiamo a rivedere. retta tangente al punto 1 x 2 x (ti + Dt) abbiamo il modo di ricavare geometricamente la velocità media. Tracciamo sull’asse dei tempi l’intervallo t e, tramite la curva, l’intervallo delle posizioni x x(ti t ) x(ti ) retta passante per i punti 1 e 2 x = f(t) Dx x (ti) 1 Dt O ti ti + Dt t Figura 2.30 Determinazione della velocità media e della velocità per il moto vario. Il metodo è valido anche per il caso di MRUA dove il diagramma x-t è una parabola (fig. 2.18). UNITÀ C2 - MOTI A UNA DIMENSIONE Gli estremi dei due intervalli sono le coordinate dei punti 1 e 2. Dalla geometria analitica, vm è il coefficiente angolare della retta passante per i punti 1 e 2. Per esempio, la funzione posizione per il MRV armonico (2.40) x(t ) A sen t descrive l’andamento della posizione (fig. 29a). Velocità La sua derivata è la funzione Per la velocità procediamo come descritto nella figura 2.13 dell’unità A2. La velocità è definita dalla (2.8) che riproponiamo dx v dt In questo caso dobbiamo ridurre a zero l’intervallo t, in modo da avvicinare il punto 2 al punto 1 e, di conseguenza la retta passante per i due punti diventare tangente al punto 1 (retta tratteggiata in figura). Quindi v(t ) A cos t che (appunto) descrive l’andamento della velocità (fig. 2.29b). Accelerazione media e accelerazione nel MRV la velocità nell’istante ti è il coefficiente angolare della retta tangente al punto di coordinate x(ti) e ti del diagramma x-t. Il procedimento per determinare l’accelerazione media e l’accelerazione è perfettamente analogo a quello per la velocità: occorre solo sostituire la posizione x con la velocità v e la velocità v con l’accelerazione a. Trasformiamo la definizione in termini analitici ricorrendo alla definizione di derivata. Di nuovo come esempio il MRV armonico: la funzione velocità (2.41a) La velocità nell’istante ti è la derivata della funzione posizione x = f(t) calcolata per t = ti. Per quanto riguarda l’andamento della velocità nel MRV abbiamo che la derivata della funzione posizione x = f(t) è la funzione che descrive l’andamento della velocità nel diagramma v-t per il MRV. v(t ) A cos t descrive l’andamento della velocità nel diagramma v-t (fig. 29b): la sua derivata è la funzione a (t ) A 2 sen t che descrive l’andamento dell’accelerazione nel diagramma a-t (fig. 29c). 279 unità C2 Riepilogo 2.1 Moti rettilinei traiettoria rettilinea: comporta come sistema di riferimento un singolo asse cartesiano. 2.3 Moto rettilineo uniformemente accelerato accelerazione: grandezze cinematiche: sono espresse solo con i moduli dei relativi vettori preceduti dal segno algebrico più (meno) se il vettore è concorde (discorde) con il versore dell’asse cartesiano. verso del moto: è indicato dal vettore spostamento; è positivo (negativo) se il vettore spostamento è concorde (discorde) con il versore dell’asse cartesiano. a(t ) a che si traduce in vettore accelerazione sempre costante. velocità: v(t ) a t v0 verso del vettore velocità: è sempre concorde a quello del moto. 2.2 Moto rettilineo uniforme dove v(t) è la velocità all’istante t, a è l’accelerazione costante e v0 è la velocità iniziale; il grafico è una retta con coefficiente angolare a. velocità: v (t ) v legge oraria: s (t ) che si traduce in vettore velocità sempre costante. velocità media e scalare: vm = v la velocità media è uguale alla velocità scalare. 1 2 a t v0 t s0 2 dove s(t) è la distanza percorsa all’istante t, a è l’accelerazione costante, v0 è la velocità iniziale, s0 è la posizione iniziale; il grafico è una porzione di parabola. velocità in funzione della distanza: accelerazione: a(t ) 0 che si traduce in vettore accelerazione sempre nullo. legge oraria: v v02 2a ( s s0 ) dove a è l’accelerazione costante, v0 è la velocità iniziale, s0 è la posizione iniziale; v indica la velocità che assume il punto materiale alla distanza percorsa (s – s0). s (t ) v t s0 2.4 Moto in caduta libera dove s(t) è la distanza percorsa all’istante t, v è la velocità costante ed s0 è la posizione iniziale; il grafico è una retta con coefficiente angolare v. caduta libera: moto dove agisce solo la forza peso, imprimendo al punto materiale un’accelerazione uguale all’accelerazione di gravità g = 9,81 m/s2. UNITÀ C2 - MOTI A UNA DIMENSIONE caduta libera da fermo: moto in cui il punto materiale è lasciato cadere da una altezza h senza imprimere alcun lancio o spinta. tipo di moto: rettilineo uniformemente accelerato con accelerazione uguale a quella di gravità. 281 punti di inversione: estremi del segmento-traiettoria, dove il corpo inverte il verso del moto. centro di oscillazione: punto medio del segmento-traiettoria, equidistante dai punti di inversione. ampiezza di oscillazione: distanza tra il centro di oscillazione e un punto di inversione. tempo di caduta: th 2h g dove h è l’altezza da cui è lasciato cadere il punto materiale e g è l’accelerazione di gravità. oscillazione completa: oscillazione in cui il corpo ritorna al punto iniziale dopo essere passato una sola volta per tutti i punti del segmento-traiettoria. periodo: intervallo di tempo indicato con T che il corpo impiega a compiere un oscillazione completa. velocità d’impatto al suolo: frequenza: f vf 2 g h 1 T dove h è l’altezza da cui è lasciato il punto materiale e g è l’accelerazione di gravità. indica il numero di oscillazioni complete compiute durante il periodo T. caduta libera con lancio verticale: caduta libera in cui il punto materiale è lanciato verso l’alto, in verticale, con una velocità iniziale v0. pulsazione: 2 f 2 T tempo di salita: dove T è il periodo ed f è la frequenza. posizione: x(t ) A sen t dove ts è il tempo che impiega il punto materiale a salire alla massima quota dove la velocità si annulla e, inizia a scendere verso il suolo; v0 è la velocità iniziale di lancio e g è l’accelerazione di gravità. dove x(t) è la posizione occupata all’istante t, A è l’ampiezza di oscillazione, è la pulsazione. quota massima: velocità: è la distanza percorsa dal punto materiale dal punto di lancio alla sommità della sua traiettoria verticale dove la velocità si annulla. v(t ) A cos t dove v(t) è la velocità all’istante t, A è la pulsazione. accelerazione: 2.5 Moto armonico moto armonico: moto rettilineo dove il corpo oscilla tra gli estremi di un segmento (segmentotraiettoria). a (t ) A 2 sen t dove a(t) è l’accelerazione all’istante t, A è l’ampiezza di oscillazione, è la pulsazione. Riepilogo v02 2g C2 xmax unità v ts 0 g unità C2 Verifiche TEST 1 2 3 La figura rappresenta il diagramma posizionetempo di un corpo. Un punto materiale si muove di moto uniforme lungo una linea retta. All’istante iniziale t = 0 occupa la posizione x0 = 0. La velocità, l’accelerazione e la posizione all’istante t sono a) v = 0, a = 0, x = 0 b) v = cost, a = 0, x = 0 c) v = cost, a = 0, x = v t d) v = cost, a = cost, x = v t x (m) 20 10 0 Tra i grafici in figura, quale rappresenta un moto rettilineo uniforme? 1 -10 2 3 4 t (s) 5 -20 a) x (m) Qual è il grafico velocità-tempo corrispondente? t (s) a) v (m/s) 20 b) 10 x (m) 0 -10 1 2 3 4 5 t (s) 1 2 3 4 5 t (s) 1 2 3 4 5 t (s) -20 t (s) c) b) v (m/s) 20 10 v (m/s) 0 -10 -20 t (s) c) d) v (m/s) 20 v (m/s) 10 0 -10 t (s) -20 UNITÀ C2 - MOTI A UNA DIMENSIONE 283 d) v v (m/s) 20 C 10 B 0 1 -10 2 3 4 D t (s) 5 A -20 t (s) 4 In figura è rappresentato il diagramma velocitàtempo di un corpo che si muove lungo una linea retta. La distanza percorsa dal corpo in 3 s è a) 1 m b) 3 m c) 5 m d) 9 m 7 At which point on the preceding velocity-time graph is the acceleration negative? a) A b) B c) C d) D 8 Un corpo in moto su una linea retta ha il diagramma velocità-tempo in figura. Lo spazio percorso dal corpo è a) 16 m b) 24 m c) 32 m d) 48 m v (m/s) 3 v (m/s) 0 0 1 2 3 4 5 6 t (s) 8,0 6,0 2,0 0,0 0,0 1,0 2,0 3,0 4,0 5,0 6,0 9 t (s) Due corpi occupano all’istante iniziale la stessa posizione. Iniziano a muoversi in linea retta: il primo con un’accelerazione costante a, il secondo con un’accelerazione costante 2a. Dopo un certo intervallo di tempo il secondo corpo ha percorso una distanza a) doppia rispetto al primo b) pari alla metà del primo c) quadrupla rispetto al primo d) pari a un quarto del primo Verifiche At which point on the velocity-time graph is the acceleration zero? a) A b) B c) C d) D 4,0 C2 6 Un punto materiale si muove di moto rettilineo uniformemente accelerato. All’istante iniziale t = 0 occupa la posizione x0 = 0 con velocità v0 = 0. La velocità, l’accelerazione e la posizione all’istante t sono a) v = 0, a = 0, x = 0 b) v = cost, a = cost, x = 0 c) v = a t, a = cost, x = v t d) v = a t, a = cost, x = 1/2 a t2 unità 5 284 MODULO C - CINEMATICA 10 L’accelerazione di caduta libera nel vuoto a) è costante b) dipende dalla massa del corpo che cade c) diminuisce con l’aumentare dell’altezza di caduta d) aumenta con l’aumentare dell’altezza di caduta Verifiche C2 16 Cosa si intende per moto rettilineo uniforme? 17 Descrivere il diagramma velocità-tempo di un moto rettilineo uniforme. 11 A uguale altezza dal suolo la velocità di caduta nel vuoto a) è inversamente proporzionale all’accelerazione di gravità b) è direttamente proporzionale all’accelerazione di gravità c) aumenta dove l’accelerazione di gravità è maggiore d) diminuisce dove l’accelerazione di gravità è maggiore 18 Si può ricavare la distanza percorsa da un punto materiale dal diagramma velocità-tempo? 12 Un corpo è lasciato cadere nel vuoto da un’altezza h. La velocità con cui il corpo arriva al suolo è 21 Cosa si intende per moto rettilineo uniformemente accelerato? a) 2g h b) 2h g c) gh d) 2gh 13 Nota la pulsazione di un moto armonico, il periodo T è a) 2/ b) /2 c) 2/ d) unità QUESITI 19 Com’è il diagramma distanza-tempo di un moto rettilineo uniforme? 20 Quale indicazione ci dà la pendenza di un grafico distanza-tempo? 22 Descrivere il diagramma velocità-tempo di un moto rettilineo uniformemente accelerato. 23 Com’è il diagramma distanza-tempo di un moto rettilineo uniformemente accelerato? 24 Car A starts from rest and travels in a straight line with acceleration a. It reaches velocity v in time t. Car B starts from rest and travels in a straight line with acceleration a/2. What is velocity reached by car B at time t? 25 Quando si ha una decelerazione? 26 A car is travelling east moving at 10 m/s when the brakes are applied. What is the direction of the acceleration? 14 In un moto armonico la pulsazione è e l’ampiezza è A. La massima velocità è a) /A b) –/A c) –A d) A 27 Che tipo di moto è il moto di caduta libera nel vuoto? 15 Nel moto armonico descritto nel test precedente, la massima accelerazione è a) –2/A b) 2/A c) –2A d) 2A 29 Un sasso e un foglio di carta cadono insieme nel vuoto dalla stessa altezza. Quale oggetto raggiunge il suolo con velocità maggiore? 28 Che valore ha l’accelerazione del moto di caduta libera nel vuoto? 30 Quali sono le unità di misura nel SI delle grandezze frequenza, pulsazione e periodo? UNITÀ C2 - MOTI A UNA DIMENSIONE Moto rettilineo uniforme (2.2) 33 Sapendo che la velocità uniforme del suono è di 340 m/s, calcolare dopo quanto tempo un suono prodotto in A è percepito in B, se la distanza tra A e B è di 1,6 km. 34 Per determinare esattamente la distanza TerraLuna, è stato messo sulla Luna uno specchio. Si è misurato che la luce impiega 2,50 s a percorrere il tragitto Terra-Luna-Terra. Qual è la distanza Terra-Luna? 35 Un ciclista ha percorso un itinerario alla velocità media di 36,0 km/h, impiegando 6,00 ore e 15,0 minuti. Calcolare la lunghezza del percorso. 36 A person walks north for 20 minutes at a speed of 1.2 m/s. She then has lunch, while resting for 10 minutes. She continues to walk north for another 30 minutes at 1.2 m/s. What is her speed during this hour? 37 Un’automobile è partita da Milano dirigendosi verso Modena. La sua tabella di marcia è la seguente Ore Casello autostradale di km percorsi 8,00 Milano 0,00 9,00 Parma 110 9,30 Modena Nord 157 39 Un aereo che dovrebbe percorrere 3270 km alla velocità media di 520 km/h, causa vento contrario, è in ritardo di 20,0 minuti. Qual è stata la sua velocità media? 40 At t = 2.0 s a particle moving with constant velocity is at x = 8.8 m. What is its position in meters at t = 2.8 s if it starts at the origin at t = 0? 41 Un autocarro procede a velocità costante v1 = 60 km/h a 400 m di distanza dietro un altro la cui velocità è v2 = 42 km/h. Rappresentare i moti dei due autocarri in un diagramma posizione-tempo. Quanto tempo impiega il primo veicolo a raggiungere il secondo? 42 Due amici, Luca e Paolo, si rincorrono su una strada rettilinea; nell’istante in cui si fa partire il cronometro, Luca, con velocità di 2,2 m/s è avanti di 42 m a Paolo, che corre con la velocità di 12 km/h. Rappresentare il moto dei due amici in un grafico posizione-tempo. Calcolare in quale istante e a quale distanza dal punto di partenza di Paolo i due amici si raggiungono. 43 Due persone partono dagli estremi di un corridoio lungo 10 m e si muovono uno verso l’altro con velocità costanti di 3,5 m/s e 4,0 m/s. Determinare dopo quanto tempo e in quale punto del corridoio le due persone s’incontrano. Trovare la soluzione anche per via grafica. Moto rettilineo uniformemente accelerato (2.3) Calcolare la velocità media nei tratti MilanoParma e Parma-Modena Nord. Calcolare la velocità media sull’intero percorso. 44 Un’automobile, ferma al semaforo, parte al segnale verde e, in 6,0 s, raggiunge la velocità di 50 km/h. Calcolare l’accelerazione dell’auto. Verifiche PROBLEMI 38 Un corpo si muove con moto uniforme, percorrendo nei primi 18 minuti 28,8 km. Al termine dei 18 minuti, riduce improvvisamente la sua velocità a 3/4 di quella iniziale e percorre così 48 km. Calcolare la durata del movimento e la velocità media complessiva. C2 32 Quando è nulla la velocità di un corpo che si muove di moto armonico? Quando è nulla l’accelerazione? La velocità media complessiva corrisponde al valor medio delle velocità calcolate nei due tratti? unità 31 Descrivere i diagrammi posizione-tempo, velocità-tempo e accelerazione-tempo di un moto armonico. 285 286 MODULO C - CINEMATICA 45 Una nave riduce in 5,0 s la sua velocità da 16 km/h a 10 km/h. Qual è la sua decelerazione? 46 Un’automobile si muove su strada rettilinea con velocità di 144 km/h; subisce una decelerazione di –1,5 m/s2. Calcolare la velocità raggiunta dall’auto dopo 20 s. 47 Un punto mobile, con velocità iniziale di 12 m/s, diminuisce la sua velocità di 0,05 m/s a ogni secondo. Dopo quanto tempo si fermerà? 48 Un’automobile parte da ferma con accelerazione costante uguale a 3,5 m/s2. Calcolare lo spazio percorso dall’automobile dopo aver raggiunto la velocità di 70 km/h. 49 Un punto materiale si muove di moto uniformemente decelerato; la sua velocità iniziale è di 12 m/s; la sua decelerazione è di –0,060 m/s2. Quanto spazio percorrerà prima di fermarsi? 50 Un aereo per decollare deve raggiungere sulla pista la velocità di 360 km/h. Qual è il minimo valore dell’accelerazione necessario per decollare da una pista di 1,8 km? unità C2 Verifiche 51 Un’automobilista viaggia alla velocità di 90 km/h. Per effettuare un sorpasso accelera con accelerazione costante fino a raggiungere la velocità di 144 km/h. Sapendo che la distanza percorsa durante la fase di sorpasso è di 325 m, calcolare il valore dell’accelerazione e la durata del sorpasso. 52 Due automobili A e B sono in moto lungo una strada rettilinea con velocità rispettivamente uguali a 72,0 km/h e 90,0 km/h. Nell’istante in cui le due auto si trovano a una distanza di 60,0 m, il conducente A, che si trova dietro, decide di effettuare un sorpasso e comincia ad accelerare la vettura con un’accelerazione costante di 2,00 m/s2. Calcolare dopo quanto tempo avviene il sorpasso e la velocità dell’auto A in quell’istante. 53 Un’auto che viaggia alla velocità costante di 30 m/s passa davanti a una pattuglia della polizia. Un secondo dopo che la pattuglia vede l’auto, inizia un inseguimento con un accelerazione di 3,0 m/s2. Rappresentare i diagrammi velocità-tempo e posizione-tempo delle due auto e determinare anche graficamente l’istante in cui la pattuglia raggiunge l’auto. 54 In figura sono rappresentati i diagrammi velocità-tempo di due auto A e B. Sapendo che all’istante iniziale le auto A e B occupano la stessa posizione, determinare quale distanza separa A e B all’istante t = 4,0 s e all’istante t = 10 s. v (m/s) 40 B 30 A 20 10 0 0,0 2,0 4,0 6,0 8,0 10 t (s) 55 In figura è rappresentato il diagramma velocità-tempo di una motocicletta che si muove su una strada rettilinea. Di che tipo di moto si tratta? Ricavare l’accelerazione della motocicletta e determinare la distanza percorsa dall’auto 10 s dopo l’istante iniziale. v (m/s) 25 20 15 10 5,0 0,0 0,0 2,0 4,0 6,0 8,0 10 t (s) UNITÀ C2 - MOTI A UNA DIMENSIONE 58 Due corpi A e B sono lanciati da un’altezza di 10 m nel vuoto. Il corpo A è lanciato verso l’alto con una velocità di 5 m/s. Il corpo B è lanciato verso il basso con una velocità di 5 m/s. Determinare il rapporto tra la velocità di A e quella di B quando ciascun corpo raggiunge il suolo. 59 Un sasso è lanciato verticalmente verso l’alto con una velocità iniziale di 10 m/s. Trascurando la resistenza dell’aria, determinare a quale altezza massima arriva. Quanto tempo impiega per raggiungere l’altezza massima e tornare al punto di partenza? 60 Un ragazzo lancia verticalmente verso l’alto una palla. Se la palla raggiunge un’altezza massima di 1,5 m rispetto al punto di lancio, con quale velocità è stata lanciata? Quanto tempo ha impiegato per raggiungere tale altezza? Ricadendo giù, con quale velocità la palla torna nella mano del ragazzo e quanto tempo impiega a ritornarvi? Moto armonico (2.5) 61 Quanto valgono la frequenza e la pulsazione in un moto armonico in cui il periodo è 10 s? 63 Una massa, fissata all’estremo di una molla sospesa verticalmente, oscilla su e giù percorrendo ogni volta un segmento di 8,0 cm con moto armonico di periodo 0,20 s. Calcolare i moduli della massima velocità e della massima accelerazione raggiunte. 64 Una pallina attaccata a una molla oscilla con moto armonico su di un piano orizzontale liscio, fra due posizioni distanti 50 cm. Quando la pallina passa per il centro dell’oscillazione, la sua velocità è 2,0 m/s. Quanto impiega la pallina per andare da un estremo all’altro? Qual è il modulo della sua massima accelerazione? 65 Una massa attaccata a una molla oscilla con moto armonico su di un piano orizzontale liscio. Quando la massa dista 10 cm dal centro di oscillazione, la sua accelerazione è 20 m/s2. Determinare a quale distanza dal centro di oscillazione si trova la massa quando la sua accelerazione raggiunge il valore massimo di 56 m/s2. Calcolare quante oscillazioni compie la massa in un secondo. 66 Un corpo si muove di moto rettilineo lungo un asse x seguendo la legge oraria x(t) = A sen (t), dove A = 0,4 m e = /4 rad/s. Calcolare la velocità e l’accelerazione nell’istante t = 2 s. Verifiche 57 A rock is dropped from a height of 50 m. What is its speed when it is half way to the ground if its initial speed is zero? C2 56 Un corpo, in un certo tempo, ha fatto una caduta nel vuoto di 80,0 m. Di quanto cadrà in un tempo doppio? 62 Un corpo che si muove di moto armonico compie 3757 oscillazioni in 4,0 minuti e 49 s. Determinare la frequenza, il periodo e il tempo necessario per compiere 429 oscillazioni. unità Moto in caduta libera (2.4) 287 288 MODULO C - CINEMATICA LABORATORIO Cinematica del moto su piano inclinato (esperimento di Galileo) Obiettivo Replicare l’esperimento di Galileo Galilei in cui si dimostra il moto uniformemente accelerato di una piccola sfera (sferetta) che scende per un piano inclinato (fig. 2.31). Figura 2.31 Piano inclinato usato da Galileo Galilei nel suo esperimento sul MRUA. Se il moto della sferetta è uniformemente accelerato, la sua velocità aumenta proporzionalmente al tempo. Per verificare tale proporzionalità, occorre misurare la velocità raggiunta dalla sferetta a diverse distanze dalla posizione iniziale e misurare i corrispondenti tempi. Per queste misure occorre un sensore di moto, strumento che naturalmente non possedeva Galileo: lo scienziato superò la difficoltà ricorrendo a una misura indiretta. Strategia con misura indiretta Affermare che la velocità in un moto rettilineo aumenta proporzionalmente al tempo equivale ad affermare che la distanza x(t) percorsa è proporzionale al quadrato del tempo t impiegato per percorrerla. Infatti, in un moto uniformemente accelerato, l’accelerazione è definita dalla (2.19) a v v0 t t0 e la velocità media può essere data da vm v v0 2 unità C2 Verifiche Nell’esperimento, all’istante iniziale t0 = 0, sono nulle la velocità iniziale (v0 = 0) e la posizione iniziale (x0 = 0). Combinando i due precedenti rapporti e dopo alcuni semplici passaggi matematici, si ottiene la proporzionalità precedentemente accennata espressa come costante x(t ) t2 (1) Quindi, dimostrando che il rapporto (1) si mantiene costante durante il moto, si dimostra indirettamente il moto uniformemente accelerato della sferetta. Per verificare il rapporto (1) si misurano solo lunghezze e tempi (misure fattibili con la strumentazione a disposizione di Galilei). UNITÀ C2 - MOTI A UNA DIMENSIONE 289 Materiali tubo di plastica rigida di lunghezza 3 m e diametro di circa 5 cm sferetta d’acciaio del diametro di circa 2 cm piccola tanica d’acqua recipiente di vetro graduato tubicino flessibile Preparazione esperimento Pratichiamo sei fori equidistanti a 500 mm nel tubo di plastica: in questo modo rileviamo il passaggio della sferetta nel momento che raggiunge la distanza xi tra l’estremità del tubo da cui parte, foro 0, x0 = 0, e l’i-esimo foro. Incliniamo non eccessivamente il tubo con aste dotate di morsetti a ganascia, (fig. 2.32). Il sistema di riferimento composto dall’asse x è sovrapposto al tubo di plastica e ha verso rivolto in basso. La sferetta nella posizione iniziale possiamo bloccarla con un cacciavite introdotto verticalmente nel foro 0. Figura 2.32 diametr o 5 cm 500 mm 2 3 x2 0 1 2 x3 3 4 5 6 Figura 2.33 Orologio ad acqua rudimentale. Sequenza esperimento 1. Partenza della sferetta dal foro 0 del tubo di plastica all’istante t0 = 0. 2. Misura dell’istante di tempo t1 in cui la sferetta passa nel foro 1. 3. Ripetere il punto 2 per i successivi fori. C2 unità Per la misura del tempo ricorriamo a un rudimentale orologio ad acqua: è costituito da una tanica d’acqua appesa con applicato un tubicino flessibile e un recipiente di vetro graduato al suolo (fig. 2.33). Posizioniamo l’estremità libera del tubicino sopra il recipiente di vetro e pieghiamo con una mano l’estremità in modo che non fluisca l’acqua. All’istante iniziale facciamo fluire l’acqua nel recipiente allentando il tubicino. Verifiche Misura del tempo 290 MODULO C - CINEMATICA Nell’istante che la sferetta attraversa l’i-esimo foro relativo alla i-esima distanza xi x0 per i = 1, 2, 3, 4, 5, 6 sottoposta a misura, interrompiamo il flusso di acqua piegando nuovamente il tubicino. Naturalmente l’orologio ad acqua non misura il tempo in secondi: effettua invece una misura indiretta fornendo la quantità di acqua in millilitri accumulata nel recipiente nell’intervallo di tempo che la sferetta percorre la distanza i-esima. Raccolta dati Nella seguente tabella riportiamo i tempi misurati (ti), il loro quadrato (ti)2 e il relativo rapporto xi/(ti)2, dove verificheremo il suo valore costante come richiesto dalla condizione (1). foro xi (mm) ti (ml) (ti)2 xi /(ti)2 0 0 0 0 0 1 500 t1 2 1000 t2 3 1500 t3 4 2000 t4 5 2500 t5 6 3000 t6 Proposta unità C2 Verifiche Invitiamo a ripetere l’esperimento aumentando di poco l’inclinazione del tubo. La pendenza la possiamo esprimere come rapporto tra il dislivello h tra le estremità del tubo e la sua lunghezza (ad esempio se il tubo ha un dislivello di 5 cm ed è lungo 2,5 m, la sua pendenza sarà del 2%). Le inclinazioni devono essere comunque piccole.
© Copyright 2026 Paperzz