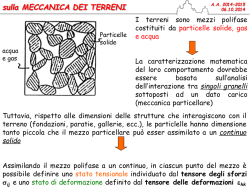
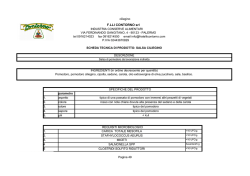
` DEGLI STUDI DELLA CALABRIA UNIVERSITA Facolt`a di Ingegneria Corso di Laurea in Ingegneria Edile Tesi di Laurea Analisi ad elementi di contorno del problema di De Saint Venant con legame ortotropo. Relatore: prof. Maurizio Aristodemo Candidato: Daniele Gaspari Anno Accademico 2001/2002 Indice 1 Introduzione 4 1.1 Le tecniche di discretizzazione e il metodo degli elementi di contorno . . . . . . . 5 1.2 I materiali anisotropi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.3 Obiettivi e contenuti della tesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2 Il problema di De Saint Venant 10 2.1 Ipotesi generali e formulazione del problema 2.2 Integrazione delle equazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2.3 Caratteristiche della sollecitazione e determinazione delle costanti . . . . . . . . 15 2.4 Stato di deformazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 2.5 Torsione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 2.6 Taglio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3 Il caso di legame ortotropo . . . . . . . . . . . . . . . . . . . . 10 25 3.1 Generalit` a sul legame costitutivo . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 3.2 Caratteristiche meccaniche di alcuni materiali ortotropi . . . . . . . . . . . . . . 27 3.3 Formulazione del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 3.4 Determinazione delle costanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 3.5 La torsione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 3.6 Il taglio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 4 Formulazione integrale sul contorno 40 1 INDICE 4.1 Forme integrali deboli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 4.2 Equazione integrale sul contorno e soluzione fondamentale . . . . . . . . . . . . . 42 5 Discretizzazione ad elementi di contorno 45 5.1 Discretizzazione del contorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 5.2 Generazione del sistema algebrico . . . . . . . . . . . . . . . . . . . . . . . . . . 46 6 Caratteristiche del modello sviluppato 49 6.1 Funzioni di interpolazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 6.2 Valutazione analitica dei coefficienti integrali . . . . . . . . . . . . . . . . . . . . 52 7 Organizzazione del programma di calcolo 57 7.1 Struttura del codice e variabili globali . . . . . . . . . . . . . . . . . . . . . . . . 57 7.2 Organizzazione delle procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 7.2.1 Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 7.2.2 Pre-analisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 7.2.3 Analisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 7.2.4 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 7.2.5 Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 8 Sperimentazione numerica del modello 8.1 8.2 74 Torsione con legame isotropo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 8.1.1 Sezione triangolare equilatera . . . . . . . . . . . . . . . . . . . . . . . . 75 8.1.2 Sezione rettangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 8.1.3 Sezione ottagonale regolare . . . . . . . . . . . . . . . . . . . . . . . . . . 80 8.1.4 Sezione tubolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 8.1.5 Sezione scatolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83 Taglio con legame isotropo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84 8.2.1 Sezione rettangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84 8.2.2 Sezione triangolare equilatera . . . . . . . . . . . . . . . . . . . . . . . . 86 8.2.3 Sezione in parete sottile a C . . . . . . . . . . . . . . . . . . . . . . . . . 88 2 INDICE 8.2.4 8.3 8.4 8.5 Sezione scatolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 Torsione con legame ortotropo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 8.3.1 Sezione rettangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 8.3.2 Sezione triangolare equilatera . . . . . . . . . . . . . . . . . . . . . . . . 93 8.3.3 Sezione a croce . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 8.3.4 Sezione a parete sottile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 8.3.5 Sezione tubolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100 8.3.6 Sezione scatolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102 Taglio con legame ortotropo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103 8.4.1 Sezione rettangolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104 8.4.2 Sezione triangolare equilatera . . . . . . . . . . . . . . . . . . . . . . . . 106 8.4.3 Sezione scatolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 Osservazioni conclusive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109 Bibliografia 112 3 Capitolo 1 Introduzione I problemi che si pongono nell’ingegneria strutturale conducono a equazioni differenziali che spesso non possono essere risolte in forma analitica. Le possibilit` a di trovare soluzioni esatte sono limitate a problemi monodimensionali o a problemi con pi` u variabili dotati di particolari simmetrie. Nell’ambito dei problemi di elasticit` a lineare, la situazione di legame isotropo semplifica l’analisi in forma chiusa per la presenza di due soli coefficienti elastici nelle relazioni di legame costitutivo. L’interesse per l’analisi di problemi con legame non isotropo `e stato di recente rinnovato dalla disponibilit` a di nuovi materiali adatti alla realizzazione di elementi strutturali. Questi materiali presentano solitamente alcune simmetrie nella risposta. In particolare, ha interesse tecnico il caso di materiali con legame ortotropo. Il problema di De Saint Venant, per le sue implicazioni nell’analisi delle strutture composte da travi `e ancora, nonostante l’et` a, un problema interessante. Nel caso di una sezione generica, la ricerca della distribuzione delle tensioni tangenziali provocate dal taglio e dalla torsione e la valutazione accurata delle relative rigidezze richiedono soluzioni numeriche adeguate. Se il solido di De Saint Venant `e costituito da un materiale ortotropo, l’interesse verso soluzioni ottenute da metodi di discretizzazione diventa pi` u evidente. Questa tesi tratta la soluzione approssimata del problema di De Saint Venant per materiali 4 1 – Introduzione ortotropi, utilizzando un modello basato sulla discretizzazione del contorno. Allo scopo di definire il contesto del modello sviluppato, in questo capitolo introduttivo si premettono un breve inquadramento del metodo degli elementi di contorno nell’ambito dei metodi di discretizzazione usati nell’analisi strutturale ed alcune considerazioni sull’impiego dei materiali ortotropi negli elementi strutturali. 1.1 Le tecniche di discretizzazione e il metodo degli elementi di contorno Negli ultimi decenni, insieme al potenziamento dei mezzi di calcolo, si sono fortemente sviluppati i metodi rivolti a costruire soluzioni approssimate di problemi complessi. L’obiettivo comune dei metodi numerici `e quello di trasformare la formulazione continua del problema in una forma algebrica, sulla base di rappresentazioni approssimate dei campi incogniti. I metodi di discretizzazione sono classificabili in metodi di dominio e metodi di contorno, in base alla localizzazione delle variabili principali. Ai metodi di dominio appartengono il metodo delle differenze finite, basato sulla discretizzazione diretta delle quantit` a differenziali, e il metodo degli elementi finiti, che oggi rappresenta lo strumento pi` u affidabile e utilizzato di analisi strutturale. Questo metodo consiste in una suddivisione dell’intero dominio in elementi semplici al cui interno le funzioni incognite sono descritte attraverso funzioni di interpolazione e parametri nodali. La generazione del reticolo ` da di dominio rappresenta spesso una fase impegnativa nell’intero processo di soluzione. E notare inoltre che in questi metodi le variabili sono distribuite su tutto il dominio, anche nel caso semplice in cui si voglia conoscere la soluzione soltanto in un punto. Alcuni degli inconvenienti tipici dei metodi di dominio sono assenti nei modelli basati sulla discretizzazione del contorno. Alla base di questi metodi vi `e il lavoro di ricerca sulla formulazione integrale di contorno, iniziato nel ’800, quando nei problemi di elettromagnetismo Green ricavava informazioni sul dominio a partire da quello che accadeva sulla frontiera dello stesso. Il suo metodo delle singolarit` a `e stato poi applicato ai problemi di elasticit` a coinvolgendo il successivo lavoro di molti ricercatori, fra i quali Betti e Somigliana. Dopo pi` u di un secolo di 5 1 – Introduzione sviluppi teorici e ricerca di soluzioni analitiche, negli anni ’60 del secolo scorso sono iniziate le prime applicazioni numeriche di questo approccio con i lavori di Jaswon [16], Symm, Massonet e Rizzo. In quegli stessi anni il metodo degli elementi finiti si sviluppava molto velocemente, forse grazie alla sua maggiore semplicit` a. L’attuale denominazione di questo metodo (Boundary Element Method) `e dovuta a Brebbia, che a partire dagli anni ’70 ha contribuito alla diffusione del metodo. Le caratteristiche positive che rendono competitivo questo metodo in confronto ai metodi di dominio sono puntualizzabili come segue: • Il dominio viene discretizzato solo nei casi in cui differenze di dati lo richiedano. • L’utilizzo delle variabili `e ottimizzato, sia perch`e la formulazione sul contorno riduce le dimensioni del problema e sia perch`e `e possibile concentrare le risorse di calcolo solo nella zona di interesse. • La fase di input `e molto semplice, laddove il metodo degli elementi finiti richiede un’onerosa e spesso soggettiva generazione del reticolo, che influisce direttamente sull’accuratezza della soluzione. La forma standard del metodo `e basata sulla collocazione sul contorno di punti in cui si azzera il residuo. Di conseguenza, il metodo genera problemi algebrici governati da matrici non simmetriche, di pi` u onerosa manipolazione. La propriet` a di simmetria pu` o comunque essere raggiunta, pagando il prezzo di alcuni appesantimenti dell’analisi, come la doppia integrazione e l’aumento dell’ordine di singolarit` a negli integrali. Ottenendo una matrice dei coefficienti simmetrica si hanno dei vantaggi nel caso dei problemi di dinamica, si migliorano le caratteristiche di convergenza della soluzione e si ha la possibilit` a di accoppiare il metodo anche con discretizzazioni agli elementi finiti. 1.2 I materiali anisotropi L’isotropia elastica `e una ipotesi di legame che raramente trova conferma nel comportamento reale dei materiali. Tale comportamento dipende in genere dalla loro struttura interna, sia essa 6 1 – Introduzione naturale o indotta artificialmente. Molti dei materiali reperibili in natura hanno un comportamento anisotropo. Si tratta in genere di materiali che la natura produce nel tempo, mediante sovrapposizione di strati diversi, i quali influiscono in modo determinante sul comportamento meccanico globale. La struttura ad anelli con cui si accresce il legno fa s`ı che lungo le fibre ci sia un comportamento diverso rispetto a quello rilevato ortogonalmente ad esse. Allo stesso modo la struttura stratificata dei terreni, con caratteristiche fisiche diverse fra ogni strato, rende necessario l’utilizzo di modelli anisotropi nella meccanica delle terre e delle rocce. Un altro tipo di forte anisotropia `e quella dei cristalli, che possono essere catalogati in base alle loro propriet` a direzionali. Oltre a questi casi esistenti in natura, l’anisotropia si riscontra nei materiali prodotti artificialmente, e in particolare nei materiali formati da pi` u componenti, detti appunto materiali compositi, progettati in maniera da sfruttare le caratteristiche di ogni componente. Le diverse propriet` a meccaniche dei componenti e le modalit` a con cui essi sono combinati sono le cause dell’anisotropia dei compositi. L’accoppiamento fra materiali resistenti, ma fragili e materiali invece duttili, anche se meno resistenti, `e una tecnica riproposta nel tempo in diverse forme. Si pensi ad esempio ai mattoni di argilla e paglia, o alle catene di ferro annegate nelle murature, fino al calcestruzzo armato con acciaio e ai moderni fibro-rinforzati. Molti materiali compositi sono costituiti da matrici continue e rinforzi discontinui conglobati in esse. I rinforzi possono avere diverse forme: lamine, fibre, scaglie, etc. L’orientazione e la geometria del rinforzo governano il comportamento meccanico del sistema nelle diverse direzioni. I materiali laminati rappresentano una categoria a parte e sono realizzati sovrapponendo lamine che differiscono o nel tipo di materiale o pi` u frequentemente nella orientazione delle fibre. L’orientazione delle fibre, il materiale che le costituisce e quello utilizzato per adesivo, contribuiscono a determinare le caratteristiche del prodotto. Il legno lamellare incollato rappresenta un esempio di come questa tecnica possa portare a migliori qualit` a rispetto al materiale originario. Nell’ambito del problema affrontato in questa tesi, `e da notare che l’ipotesi di omogeneit` a del corpo richiede di operare una omogeneizzazione delle caratteristiche meccaniche. Fra i vari tipi di compositi sono di interesse quelli utilizzati nella costruzione di travi, che abbiano 7 1 – Introduzione un comportamento di tipo ortotropo. Tale modello di legame `e infatti utile per descrivere il comportamento direzionale di travi non modellabili con un legame trasversalmente isotropo. 1.3 Obiettivi e contenuti della tesi Il problema della torsione `e stato affrontato negli ultimi anni da molti ricercatori con un approccio BEM. La formulazione in termini della funzione di ingobbamento conduce ad un’equazione di Laplace, tipica anche di altri problemi fisici, come ad esempio la trasmissione del calore. Il lavoro che ha segnato l’inizio di questo percorso di ricerca `e l’articolo di Jaswon e Ponter [16] che `e stato anche uno dei primi lavori di applicazione numerica del metodo degli elementi di contorno. Le prime esperienze utilizzavano interpolazioni costanti a tratti o lineari, e riuscivano a risolvere in modo accettabile solo problemi con semplice geometria [3] [13]. Recentemente il metodo degli elementi di contorno `e stato anche applicato al problema del taglio, governato da equazioni simili a quelle della torsione [12] [14]. Negli ultimi anni si `e sviluppato inoltre un considerevole interesse verso alcuni problemi di carattere applicativo, quali la torsione non uniforme [23] o la torsione di compositi plurifase [17]. Il problema meccanico a cui si rivolge questa tesi riguarda il solido di De Saint Venant nell’ipotesi di legame ortotropo. L’obiettivo `e quello di creare un modello numerico accurato, ma allo stesso tempo essenziale, che anche con poche variabili definisca con precisione lo stato tensionale sulla sezione. Il modello ha inoltre la finalit` a di valutare gli effetti dovuti all’ortotropia del materiale, ed `e stato sviluppato nelle fasi descritte di seguito. A partire dalle equazioni che reggono il problema nell’ipotesi di isotropia, `e stata operata una generalizzazione al caso di materiale ortotropo, ottenendo le relazioni fra le grandezze di interesse (tensioni e caratteristiche globali della sezione) e tre funzioni scalari identificate da problemi differenziali di Neumann. Successivamente i problemi differenziali sono stati riportati a delle forme integrali deboli sul contorno, dalle quali `e stato possibile ricavare una formulazione discreta agli elementi di contorno. In particolare `e stato sviluppato un codice di calcolo in grado di valutare le tensioni tangenziali che insorgono a causa delle sollecitazioni di taglio e torsione. Fra le caratteristiche che rendono particolarmente efficiente il modello adottato va evidenziato 8 1 – Introduzione il tipo di interpolazione ad alta continuit` a delle variabili e l’integrazione analitica di tutti i contributi integrali. Dopo il presente capitolo introduttivo, i successivi due capitoli sono dedicati al problema di De Saint Venant. Il secondo capitolo espone le equazioni che sussistono nel caso di legame isotropo, mentre il terzo opera un’estensione delle equazioni al caso di legame ortotropo, evidenziando anche quali costanti elastiche sono necessarie per determinare lo stato tensionale da taglio e torsione. Nel successivo capitolo viene poi presentato il passaggio dal problema differenziale a quello integrale sul contorno, prima di illustrare, nel quinto capitolo, la procedura di discretizzazione agli elementi di contorno in forma generale. Segue poi un capitolo dedicato alle tecniche utilizzate per l’interpolazione HC e per il calcolo analitico dei coefficienti integrali. Il settimo capitolo `e dedicato in modo specifico al codice realizzato. In esso `e descritto il funzionamento di tutte le procedure implementate in ambiente Delphi. L’ultimo capitolo `e dedicato ai risultati numerici ottenuti sia nell’ipotesi di legame isotropo che di legame ortotropo. I risultati sono confrontati con quelli presenti in letteratura e con quelli ottenuti mediante un modello 3D ad elementi finiti, realizzato mediante il programma di analisi strutturale LUSAS, della FEA Ltd. 9 Capitolo 2 Il problema di De Saint Venant Il problema meccanico che viene affrontato riguarda la soluzione elastica di un solido omogeneo, ´ noto come problema di De Saint isotropo, di forma cilindrica, soggetto ad azioni sulle basi. E Venant, in ricordo del lavoro compiuto nella met` a del XIX secolo da Adh`emar Jean-Claude Barr´e, conte di Saint Venant. Un’approfondimento del contesto storico `e ben presentato nel testo di Benvenuto [7]. La soluzione del problema di De Saint Venant `e utilizzata nella costruzione di diversi modelli, capaci di descrivere il comportamento di molte travi reali. L’impostazione con cui si affronta il problema in questo capitolo `e quella utilizzata da Baldacci [6], che ha il pregio di un approccio pi` u generale rispetto a quello di altri testi. 2.1 Ipotesi generali e formulazione del problema Alla base del processo di soluzione vengono formulate alcune ipotesi. • Geometria: il solido preso in considerazione `e prismatico, cio´e ad asse rettilineo e sezione retta. Nell’analisi del problema si considera il sistema di riferimento in fig.2.1 (x1 ,x2 ,x3 ), con x3 coincidente con l’asse longitudinale del cilindro. Tale asse deve essere sufficientemente lungo da consentire una trattazione media integrale delle azioni sulle basi, senza specificarne la distribuzione puntuale. 10 2 – Il problema di De Saint Venant Figura 2.1. Solido di De Saint Venant - Geometria. • Legame: il legame costitutivo `e di tipo elastico lineare isotropo. Il mezzo `e omogeneo. • Carichi: le forze di massa sono supposte nulle. • Condizioni al contorno: Non sono imposti vincoli sugli spostamenti (si ottiene quindi una soluzione unica a meno di un moto rigido). Le forze di superficie agiscono solo sulle basi, lasciando libera da forze la superficie laterale, e inoltre sono definite solo in forma integrale. De Saint Venant propose infatti un principio: gli effetti prodotti da due distribuzioni di forze superficiali, in punti sufficientemente distanti dalla zona di applicazione dell’azione, sono gli stessi, purch`e si tratti di distribuzioni staticamente equivalenti. E’ possibile quindi ignorare la distribuzione puntuale delle azioni sulle basi e riferirsi soltanto alle loro risultanti, se si valutano gli effetti in punti sufficientemente distanti. Procedendo secondo il metodo semi-inverso di De Saint Venant vengono inizialmente formulate delle ipotesi sulla soluzione, verificando successivamente la congruenza di tali scelte. Tale procedimento `e rigoroso quando sia dimostrato, come in questo caso, che la soluzione al problema esiste ed `e unica. In base alla condizione di carico e alla particolare geometria considerata, `e giustificabile supporre che le componenti di tensione σ11 , σ22 e τ12 siano nulle. 11 2 – Il problema di De Saint Venant In assenza di forze di massa e in base alle ipotesi assunte, le equazioni indefinite di equilibrio portano a τ31,3 = 0, (2.1a) τ32,3 = 0, (2.1b) τ13,1 + τ23,2 + σ33,3 = 0. (2.1c) Si nota quindi che τ31 e τ32 dipendono sia da x1 che da x2 , ma non dalla sezione in cui le si calcola. Le sei equazioni di compatibilit` a in termini di tensione, ricavabili in generale per un corpo elastico lineare isotropo, forniscono 52 σhk + 1 I1,hk = 0 1+ν [h,k = 1..3]. (2.2) dove 52 indica l’operatore di Laplace, ossia 52 f = f,11 + f,22 + f,33 ; I1 indica il primo invariante di tensione, I1 = (σ11 + σ22 + σ33 ); ν indica il coefficiente di contrazione trasversale di Poisson. Queste equazioni derivano dall’imposizione della congruenza dello stato di deformazione e dall’ipotesi di isotropia elastica lineare. Sfruttando le prime due equazioni di equilibrio, si possono specializzare le (2.2). σ33,11 = 0, (2.3a) σ33,22 = 0, (2.3b) σ33,12 = 0, (2.3c) σ33,33 = 0, (2.3d) (1 + ν)(τ31,11 + τ31,22 ) + σ33,13 = 0, (2.3e) (1 + ν)(τ32,11 + τ32,22 ) + σ33,23 = 0. (2.3f) Per poter risolvere il problema e ricavare lo stato di tensione del cilindro `e necessario applicare anche le condizioni al contorno. Riguardo alle condizioni sulla superficie laterale, le prime due equazioni di equilibrio al contorno sono identicamente soddisfatte, mentre l’ultima porta a τ31 n1 + τ32 n2 = 0. 12 (2.4) 2 – Il problema di De Saint Venant Da questa equazione si ha che lungo il contorno di ogni sezione trasversale la tensione tangenziale `e tangente al contorno stesso. 2.2 Integrazione delle equazioni Dalle (2.3a)-(2.3d) si nota che σ33 `e lineare in tutte le variabili e inoltre non dipende dal prodotto x1 x2 . La forma pi` u generale in cui pu` o essere scritta `e quindi σ33 = a + a1 x1 + a2 x2 − x3 (b + b1 x1 + b2 x2 ) (2.5) dove sono state inserite sei costanti di integrazione incognite. Sostituendo l’espressione trovata per σ33 nella (2.1c) e nelle (2.3e)-(2.3f) si ha τ31,1 + τ32,2 = b + b1 x1 + b2 x2 , (2.6) τ31,11 + τ31,22 = (1 + ν)−1 b1 , (2.7) τ32,11 + τ32,22 = (1 + ν)−1 b2 . (2.8) ´ possibile operare sul sistema di equazioni differenziali, derivando la (2.6) rispetto a x1 e E x2 , e sottraendo le equazioni cos`ı ottenute dalle (2.7)-(2.8). Si ha (τ32,1 − τ31,2 ),2 = b1 ν¯, (2.9a) (τ32,1 − τ31,2 ),1 = −b2 ν¯. (2.9b) dove con ν¯ si `e indicato il prodotto ν(1 + ν)−1 . Dalle (2.9) si ha ν b2 dx1 + ν¯b1 dx2 . d(τ32,1 − τ31,2 ) = −¯ (2.10) τ32,1 − τ31,2 = ν¯(b1 x2 − b2 x1 ) + c (2.11) Integrando si ottiene dove c `e un’ulteriore costante di integrazione. Si `e cos`ı ottenuto un problema differenziale del tipo τ31,1 + τ32,2 = b + b1 x1 + b2 x2 , τ32,1 − τ31,2 = ν¯(b1 x2 − b2 x1 ) + c. 13 (2.12) 2 – Il problema di De Saint Venant La soluzione di questo problema pu` o essere scissa nella somma di due termini: una soluzione particolare del sistema, pi` u la soluzione del problema omogeneo associato. 0 τ31 = τ¯31 + τ31 , (2.13a) 0 τ32 = τ¯32 + τ32 . (2.13b) 0 0 − τ31,2 = 0, τ32,1 (2.14a) 0 0 τ31,1 + τ32,2 = 0. (2.14b) Si ha dunque: Per sezioni semplicemente connesse, la (2.14a) rappresenta una condizione necessaria e sufficiente per l’esistenza di una funzione scalare ϕ(x1 ,x2 ) tale che 0 τ31 = ϕ,1 , 0 τ32 = ϕ,2 , (2.15) mentre (2.14b) conduce a 52 ϕ(x1 ,x2 ) = ϕ,11 + ϕ,22 = 0. (2.16) La funzione scalare ϕ `e quindi armonica nella sezione trasversale. La (2.4) pu` o essere riscritta, tenendo conto delle (2.13) e delle (2.15), come condizione al contorno sulla derivata di ϕ. ϕ,n = −(¯ τ31 n1 + τ¯32 n2 ). (2.17) Due soluzioni particolari del sistema (2.12) possono essere riconosciute nelle funzioni 1 bx1 + b1 (x21 − ν¯x22 ) − cx2 , 2 1 = bx2 + b2 (x22 − ν¯x21 ) + cx1 . 2 τ¯31 = (2.18a) τ¯32 (2.18b) Il problema della distribuzione delle tensioni tangenziali `e ricondotto quindi ad un problema differenziale di determinazione di una funzione scalare, armonica in un dominio piano Ω, sul cui contorno Γ `e noto il valore della derivata normale. Tale problema `e noto in letteratura come problema di Neumann, e si dimostra avere una ed una sola soluzione, nel caso in cui sia soddisfatta la condizione Z ϕ,n dΓ = 0. Γ 14 (2.19) 2 – Il problema di De Saint Venant Nel caso in esame tale condizione `e soddisfatta [6], per cui, assegnata la geometria della sezione, `e possibile determinare ϕ a meno di una costante additiva inessenziale. Centrando il sistema di riferimento nel baricentro della sezione trasversale, si pu` o verificare dalle (2.19) e (2.12) che la costante b assume valore nullo. Esprimendo la condizione sulla derivata normale in termini delle costanti incognite si ha ϕ,n = − b1 2 b2 c (x1 − ν¯x22 )n1 − (x22 − ν¯x21 )n2 + (x2 n1 − x1 n2 ). 2 2 2 (2.20) Osservando questa espressione `e lecito scindere il problema al contorno per la ϕ in tre sottoproblemi per tre funzioni armoniche ϕ1 , ϕ2 e ϕt , tali che ϕ=− b1 b2 c ϕ1 − ϕ2 + ϕt . 2 2 2 (2.21) Le condizioni al contorno da applicare a queste nuove funzioni armoniche sono dunque indipendenti dalle costanti di integrazione ϕ1,n = (x21 − ν¯x22 )n1 , (2.22a) ϕ2,n = (x22 − ν¯x21 )n2 , (2.22b) ϕt,n = (x2 n1 − x1 n2 ). (2.22c) Le tensioni tangenziali τ31 e τ32 possono infine essere espresse in funzione delle derivate di ϕ1 , ϕ2 e ϕt 2.3 1 b1 (x21 − ν¯x22 − ϕ1,1 ) − b2 ϕ2,1 + c(ϕt,1 − x2 ) , 2 1 = b2 (x22 − ν¯x21 − ϕ2,2 ) − b1 ϕ1,2 + c(ϕt,2 + x1 ) . 2 τ31 = (2.23a) τ32 (2.23b) Caratteristiche della sollecitazione e determinazione delle costanti Grazie alla particolare collocazione del sistema di riferimento si `e annullata la costante b. Restano ora da determinare le altre sei costanti. Per fare ci` o `e necessario coinvolgere le forze superficiali sulle basi del cilindro. 15 2 – Il problema di De Saint Venant In base al postulato di De Saint Venant si pu` o fare riferimento alle risultanti delle azioni sulle basi, piuttosto che alla loro distribuzione puntuale. Per la determinazione delle costanti vengono in aiuto le sei condizioni di equilibrio globale. Lo stato di sollecitazione esterna `e esprimibile in ogni sezione come forza (F) e momento (M) risultante del sistema di forze superficiali nella sezione. Le sei componenti di questi due vettori F ≡ (T1 ,T2 ,N ), M ≡ (M1 ,M2 ,Mt ), (2.24) sono chiamate caratteristiche della sollecitazione relative alla sezione generica A. Tali caratteristiche consistono in due forze taglianti, uno sforzo normale, due momenti flettenti, ed un momento torcente. Il loro legame con le tensioni nella sezione `e T1 = R Ω τ31 dΩ, (2.25a) T2 = R τ dΩ, Ω 32 (2.25b) N= R σ33 dΩ, (2.25c) Ω σ33 x2 dΩ, (2.25d) Ω M1 = R M2 = − Mt = R Ω R Ω σ33 x1 dΩ, (2.25e) (τ32 x1 − τ31 x2 )dΩ. (2.25f) dove con Ω si `e indicata l’area della sezione trasversale del cilindro. Dalle (2.25) si pu` o ricavare l’espressione delle costanti in funzione delle caratteristiche della sollecitazione sulla sezione. Sostituendo l’espressione (2.5) in (2.25c)-(2.25e), e tenendo conto che nel sistema baricentrico i momenti statici rispetto agli assi hanno valore nullo, si ha N= M10 = aΩ, (2.26) a1 J12 + a2 J11 , (2.27) M20 = −a2 J12 − a1 J22 . (2.28) dove M 0 indica il momento agente sulla base Ω0 (x3 =0), J11 e J22 indicano i momenti di inerzia rispetto agli assi x1 e x2 e J12 il momento di inerzia misto. 16 2 – Il problema di De Saint Venant Le prime tre costanti hanno quindi valore N Ω, a= (2.29a) 1 a1 = − D (M10 J12 + M20 J11 ), 1 0 D (M2 J12 a2 = (2.29b) + M10 J22 ); (2.29c) 2 con D = J11 J22 − J12 . Dall’equilibrio globale del cilindro si ha M1 = M10 + T20 x3 , M2 = M20 − T10 x3 . (2.30) Confrontando (2.30) con (2.25d)-(2.25e) e (2.5) si ottengono i valori delle costanti b1 e b2 in funzione delle caratteristiche taglianti b1 = −D−1 (T1 J11 − T2 J12 ), (2.31a) b2 = −D−1 (T2 J22 − T1 J12 ). (2.31b) Per quanto riguarda l’ultima costante c si pu` o utilizzare (2.13), (2.25f) e (2.18). Si ottiene cos`ı una relazione fra Mt ,b1 ,b2 e c Mt = Z (x1 ϕ,2 − x2 ϕ,1 )dΩ + Ω 1 (−b1 (J122 − ν¯J111 ) + b2 (J112 − ν¯J222 ) + cJ0 ) 2 (2.32) dove J111 = Z x32 dΩ, J112 = Z Ω x22 x1 dΩ, J122 = Ω Z x2 x21 dΩ, J222 = Ω Z x31 dΩ. (2.33) Ω Evidenziando la dipendenza del momento torcente dalle tre funzioni scalari si ha Mt = − b21 − b22 + 2c R Ω (x1 ϕ1,2 − x2 ϕ1,1 )dΩ + J122 − ν¯J111 R (x1 ϕ2,2 − x2 ϕ2,1 )dΩ − J112 + ν¯J222 R Ω (x1 ϕt,2 − x2 ϕt,1 )dΩ + J0 . Ω (2.34) dove J0 indica il momento di inerzia polare della sezione rispetto al baricentro. La costante c `e l’unica incognita dell’equazione (2.34). La sua espressione verr` a ricavata pi` u avanti, nel caso di sollecitazione di torsione pura, dopo aver esaminato lo stato di deformazione del solido. 17 2 – Il problema di De Saint Venant I casi semplici di sollecitazione in cui pu` o essere scomposto il problema generale sono quattro: lo sforzo normale, la flessione, la torsione e la flessione con taglio. Mentre i primi due sono risolvibili in forma chiusa e permettono un calcolo esatto delle tensioni normali sulla sezione, gli ultimi due casi presentano delle difficolt` a. E’ necessario risolvere problemi differenziali che, salvo alcuni casi di geometrie semplici, richiedono un approccio di tipo numerico. Una volta determinate le tre funzioni scalari il problema pu` o considerarsi risolto, perch`e le costanti dipendono dalle sollecitazioni sulle basi e l’espressione delle tensioni `e stata ricavata. Nei prossimi paragrafi vengono affrontati nello specifico i casi di sollecitazione di torsione e di taglio, con il calcolo di grandezze globali significative come l’inerzia torsionale e il centro di taglio. 2.4 Stato di deformazione Le equazioni costitutive di un solido elastico lineare isotropo, scritte in funzione delle costanti elastiche E, modulo di elasticit` a normale, e ν, coefficiente di contrazione trasversale, sono esprimibili come εij = 1 ((1 + ν)σij − νI1 δij ), E [i,j = 1..3] (2.35) dove δij indica il delta di Kronecker δij = 1 se i = j, 0 se i 6= j. Poich`e abbiamo supposto nulle tre delle sei componenti di tensione, le equazioni costitutive, nel problema di De Saint Venant, si semplificano in ε11 = − E1 νσ33 , (2.36a) ε22 = − E1 νσ33 , (2.36b) ε33 = σ33 E , ε12 = 0= ε13 = τ13 2G = ε23 = τ23 2G = 18 (2.36c) γ12 , 2 γ13 , 2 γ23 . 2 (2.36d) (2.36e) (2.36f) 2 – Il problema di De Saint Venant Indicando con u1 , u2 e u3 le componenti di spostamento lungo gli assi x1 , x2 e x3 , le tre componenti di rotazione assiale sono 1 (u2,1 − u1,2 ), 2 1 = (u3,2 − u2,3 ), 2 1 = (u1,3 − u3,1 ), 2 ω21 = (2.37a) ω32 (2.37b) ω13 (2.37c) Le derivate delle componenti di rotazione rispetto agli assi sono esprimibili in termini delle derivate delle componenti di deformazione. Utilizzando le (2.36) si ha ω21,1 = −ε11,2 , (2.38a) ω21,2 = ε22,1 , (2.38b) ω21,3 = ε32,1 − ε31,2 , (2.38c) ω32,1 = (2.38d) ε31,2 , ω32,2 = ε32,2 − ε22,3 , (2.38e) ω23,3 = (2.38f) ε33,2 , ω13,1 = ε11,3 − ε31,1 , (2.38g) ω13,2 = −ε32,1 , (2.38h) ω13,3 = −ε33,1 . (2.38i) Inoltre, poich`e il tensore dei gradienti di spostamento `e scomponibile nella somma del tensore simmetrico di deformazione e di quello emisimmetrico di rotazione, valgono le relazioni u2,1 = ω21 , (2.39a) u3,2 = ε32 + ω32 , (2.39b) u1,3 = ε13 + ω13 , (2.39c) u1,2 = (2.39d) −ω21 , u2,3 = ε23 − ω32 , (2.39e) u3,1 = ε31 − ω13 . (2.39f) Nel piano [x1 x2 ], essendo ε12 = 0, la componente del gradiente di spostamento u2,1 coincide con la rotazione assiale ω21 . 19 2 – Il problema di De Saint Venant Dopo aver caratterizzato in generale lo stato di tensione e di deformazione nel problema di De Saint Venant, vengono studiati adesso i casi di sollecitazione semplice di torsione e taglio. 2.5 Torsione Quando si `e in presenza di sola torsione, le costanti b1 e b2 assumono valori nulli e Mt dipende esclusivamente dalla costante c. Seguendo la scomposizione in tre sottoproblemi proposta precedentemente, la risoluzione del caso di sollecitazione torcente passa attraverso il problema differenziale 52 ϕt = 0, in Ω (2.40) ϕt,n = x2 n1 − x1 n2 , su Γ L’equazione (2.34), specializzata al caso di torsione pura, diventa c Mt = 2 Z (x1 ϕt,2 − x2 ϕt,1 )dΩ + J0 . (2.41) Ω Trasformando l’integrale attraverso la formula di Gauss, si ottiene Z (x1 ϕt,2 − x2 ϕt,1 )dΩ = Z Ω ϕt (x1 n2 − x2 n1 )dΓ = − Γ Z ϕt ϕt,n dΓ. (2.42) Γ Riportando l’integrale su tutto il dominio si ha − Z ϕt ϕt,n dΓ = − Γ Z ϕt (ϕt,1 n1 + ϕt,2 n2 )dΓ = − Z Γ ((ϕt ϕt,1 ),1 + (ϕt ϕt,2 ),2 )dΩ. (2.43) Ω Poich`e ϕt `e armonica sulla sezione, la (2.41) diventa Mt = c 2 Z J0 − (ϕ2t,1 + ϕ2t,2 )dΩ . (2.44) Ω L’integrale ottenuto al secondo membro `e chiamato integrale di Dirichlet, e lo si indica con D[ϕt ]. In questo caso di sollecitazione, le tensioni tangenziali dipenderanno solo dalle derivate di ϕt 1 c(ϕt,1 − x2 ), 2 1 = c(ϕt,2 + x1 ). 2 τ31 = (2.45a) τ32 (2.45b) 20 2 – Il problema di De Saint Venant Per quanto riguarda lo stato di deformazione, dalle (2.36) si osserva che le uniche componenti non nulle sono ε31 e ε32 . Dalle (2.38) si nota quindi che la rotazione assiale ha variazioni nulle lungo x1 e lungo x2 . La sua variazione lungo l’asse x3 ha invece l’espressione ω21,3 = ε32,1 − ε31,2 = c (τ32,1 − τ31,2 ) = = θ. 2G 2G (2.46) θ `e quindi una costante che rappresenta la rotazione relativa tra due sezioni poste a distanza unitaria e viene generalmente chiamata angolo unitario di torsione. Volendo esprimere u3,2 e u3,1 tramite la nuova costante θ si possono sviluppare le (2.39) tramite le (2.36), le (2.45) e le (2.38). Si ottiene u3,i = θϕt,i , i = 1,2. (2.47) La sezione trasversale subisce quindi un ingobbamento fuori del proprio piano, definito dalla distribuzione della funzione scalare ϕt , chiamata funzione di ingobbamento. La relazione fra momento torcente e angolo unitario di torsione pu` o essere ricavata dalla (2.44) e dalla (2.46) Mt = Gθ(J0 − D[ϕt ]). (2.48) Il prodotto G(J0 − D[ϕt ]) rappresenta la rigidezza a torsione. Il termine Jt = (J0 − D[ϕt ]) `e detto momento di inerzia torsionale e dipende esclusivamente dalla geometria della sezione. La forma di sezione pi` u rigida a torsione, fra quelle semplicemente connesse, `e quella circolare, che rende nullo l’integrale di Dirichlet e quindi massimizza il momento di inerzia torsionale. In base alle relazioni ricavate, le tensioni che insorgono a causa del momento torcente Mt possono infine essere espresse come Mt (ϕt,1 − x2 ), Jt Mt = (ϕt,2 + x1 ). Jt τ31 = (2.49a) τ32 (2.49b) Data la geometria della sezione e la sollecitazione torcente, si pu` o quindi calcolare la risposta del solido in termini di tensioni e di deformazioni. A partire dalla geometria si imposta il problema differenziale da cui ricavare la funzione di ingobbamento. Trovata la sua distribuzione 21 2 – Il problema di De Saint Venant si ricava il momento di inerzia torsionale Jt e, data la sollecitazione torcente, si calcolano le tensioni che insorgono sulla sezione. Si nota come, nel caso isotropo, le caratteristiche meccaniche siano ininfluenti nella determinazione delle tensioni e della inerzia torsionale. L’intero problema torsionale potrebbe essere riformulato utilizzando la funzione di tensione di Prandtl in sostituzione della funzione di ingobbamento. Il problema differenziale da risolvere non sarebbe allora un problema di Neumann, ma un problema di Dirichlet, in cui le condizioni al contorno impongono il valore della funzione, e non della sua derivata normale. La funzione di tensione permette di rilevare alcune analogie con altri problemi fisici, come ad esempio quello di una membrana soggetta a pressione uniforme, ma presenta condizioni al contorno pi` u articolate in presenza di sezioni pluriconnesse. La soluzione analitica di un problema differenziale di Neumann `e piuttosto difficile da determinare, tranne in casi di geometrie particolarmente semplici. Tramite metodi numerici `e possibile determinare una soluzione approssimata, mediante un codice di calcolo automatico. Il codice di calcolo sviluppato in questa tesi risolve il problema differenziale mediante un processo di discretizzazione agli elementi di contorno e sar` a analizzato in dettaglio nei prossimi capitoli. Il problema della torsione pu` o anche essere affrontato mediante procedimenti approssimati che consentono la soluzione manuale del problema, ad esempio imponendo l’andamento della funzione delle tensioni a priori; tali assunzioni sono accettabili solo per alcuni tipi di sezione. Per non appesantire la trattazione si `e voluto qui richiamare solo gli elementi essenziali del problema, rimandando ad altri testi per ulteriori approfondimenti ([6], [10]). 2.6 Taglio Poich`e il sistema di carichi sulle basi deve essere sempre equilibrato, la sollecitazione di taglio non `e isolata, ma `e accompagnata da un momento flettente. Nel caso generale in cui all’estremit` a x3 = l del solido si abbia semplicemente una sollecitazione tagliante (T1 ,T2 ), sull’altra base (x3 = 0) si hanno delle forze taglianti equilibranti e dei momenti flettenti (M10 = −T2 l, M20 = 22 2 – Il problema di De Saint Venant T1 l). Dalle (2.29), le costanti a1 e a2 hanno quindi l’espressione 1 (T2 lJ12 − T1 lJ1 ), D 1 a2 = (T1 lJ12 − T2 lJ2 ). D a1 = (2.50a) (2.50b) Confrontando le espressioni ottenute, con le (2.31) si ha a1 = lb1 , a2 = lb2 . (2.51) Come nel caso della torsione, il valore della costante c `e pari a 2Gθ, ma adesso θ non `e pari alla derivata lungo l’asse del vettore di rotazione assiale. Si pu` o esprimere ω21,3 come nella (2.46), utilizzando per` o la forma generale (2.23) assunta dalle τ . Si ha ω21,3 = θ + ν¯ (b1 x2 − b2 x1 ). 2G (2.52) Nel caso generico ω21,3 `e formata quindi da due contributi: uno di tipo torsionale ed uno prettamente tagliante. Il valor medio di ω21,3 sulla sezione `e pari al valore calcolato nel baricentro, cio`e θ. Le τ in funzione delle derivate delle tre funzioni scalari hanno l’espressione b1 2 (x − ν¯x22 − ϕ1,1 ) − 2 1 b2 = Gθ(ϕt,2 + x1 ) + (x22 − ν¯x21 − ϕ2,2 ) − 2 τ31 = Gθ(ϕt,1 − x2 ) + τ32 b2 ϕ2,1 , 2 b1 ϕ1,2 . 2 (2.53a) (2.53b) dove le costanti b1 e b2 sono note dalle (2.31). A differenza delle tensioni da torsione pura, che si possono determinare senza conoscere le caratteristiche meccaniche del mezzo isotropo, nel calcolo delle tensioni da taglio entra in gioco il coefficiente di contrazione trasversale ν. Dall’esame delle (2.53) si `e portati a separare un problema generale di taglio in due problemi pi` u semplici: • Un problema di taglio puro, avente rotazione media θ pari a 0, in cui il vettore sollecitante sulle basi `e applicato nel punto (¯ x1 ,¯ x2 ), chiamato centro di taglio. • Un problema di torsione (b1 e b2 nulli) con angolo unitario di torsione pari a θ e con momento torcente pari a ¯ t = T2 x M ¯1 − T1 x¯2 23 (2.54) 2 – Il problema di De Saint Venant La sollecitazione agente sul baricentro pu` o quindi essere applicata nel centro di taglio, a ¯ t. patto di aggiungere la coppia torcente M La posizione del centro di taglio pu` o essere determinata dalla condizione Z (x1 τ32 − x2 τ31 )dΩ = T2 x¯1 − T1 x¯2 , ∀T1 ,T2 . (2.55) Ω Sostituendo nell’integrale le (2.53) si possono determinare le coordinate del centro di taglio 1 (J22 S2 − J12 S1 ), 2D 1 (J12 S2 − J11 S1 ). x ¯2 = 2D x ¯1 = (2.56a) (2.56b) con S1 = R x1 ϕ1,2 − x2 ϕ1,1 + x21 x2 − ν¯x32 dΩ (2.57a) S2 = R x1 ϕ2,2 − x2 ϕ2,1 − x1 x22 + ν¯x31 dΩ (2.57b) D= Ω Ω 2 (J11 J22 − J12 ) (2.57c) Nel caso in cui la sezione sia dotata di assi di simmetria, il centro di taglio giace su di essi. In generale esso non appartiene agli assi principali di inerzia e pu` o non appartenere alla sezione del cilindro. In conclusione si sono evidenziati i tre problemi differenziali che definiscono la distribuzione delle tensioni tangenziali per il problema di De Saint Venant nel caso di materiale isotropo. Tutte le altre grandezze di rilievo (rigidezza torsionale, coordinate del centro di taglio, ...) sono ottenute in funzione dei tre campi scalari ϕt , ϕ1 e ϕ2 . Nel prossimo capitolo verranno ricavate le relazioni che sussistono ipotizzando un legame costitutivo ortotropo. 24 Capitolo 3 Il caso di legame ortotropo Questo capitolo si occupa di estendere al caso ortotropo i risultati ottenuti dalla soluzione del problema di De Saint Venant nel caso isotropo. Dopo una breve introduzione su alcuni tipi di legame anisotropo e di alcune caratteristiche dei materiali, si esamina il problema meccanico generale e successivamente i problemi specifici di torsione e di taglio. La formulazione del problema anisotropo viene ricondotta a forme simili a quelle ritrovate nel caso isotropo. 3.1 Generalit` a sul legame costitutivo Fino ad ora `e stato considerato il caso di un mezzo isotropo, in cui cio`e le caratteristiche elastiche sono indipendenti dalla direzione considerata. I materiali da costruzione, siano essi naturali o prodotti industrialmente, presentano spesso caratteristiche variabili in funzione della direzione analizzata e hanno quindi un comportamento anisotropo. I compositi laminati, ad esempio, presentano caratteristiche diverse a seconda che si esaminino piani paralleli o ortogonali alle lamine. Nel caso generale di anisotropia ogni componente di deformazione `e funzione di tutte e sei le componenti di tensione. L’assunzione di comportamento elastico implica che la matrice che raccoglie i 36 coefficienti sia simmetrica, riducendo quindi a 21 il numero di coefficienti indipendenti. Se la struttura del corpo anisotropo presenta qualche tipo di simmetria, questa si riflette anche sulle propriet` a elastiche, che conseguentemente hanno bisogno di un numero 25 3 – Il caso di legame ortotropo minore di coefficienti per essere definite. In questo caso le leggi costitutive si semplificano, a causa delle relazioni di dipendenza fra i coefficienti. Se tutte le direzioni sono elasticamente equivalenti, si possono esprimere tutte le equazioni in funzione di due coefficienti: il modulo elastico di Young E ed il coefficiente di contrazione trasversale ν. In forma matriciale le equazioni costitutive per 1 ν ν −E −E ε 11 E ν 1 ε22 − ν −E E E 1 ν ε33 − Eν − E E = γ23 0 0 0 γ 0 0 0 13 0 0 0 γ12 dove il modulo di elasticit` a tangenziale G = il legame elastico isotropo sono 0 0 0 σ11 0 0 0 σ22 0 0 0 σ33 1 τ23 0 0 G 1 0 G 0 τ13 1 0 0 G τ12 E 2(1+ν) (3.1) `e determinato in funzione degli altri due coefficienti e non `e quindi indipendente. Un altro caso di simmetria `e quello di legame elastico trasversalmente isotropo, in cui per ogni punto passa un piano di simmetria elastica, in cui tutte le direzioni sono elasticamente equivalenti (si tratta quindi di piani di isotropia). In questo caso il numero di costanti elastiche indipendenti `e cinque e, ipotizzando che l’asse x3 sia normale ai piani di isotropia, le equazioni sono 1 ε 11 E ε22 − ν E µ ε33 − E = γ23 0 γ 0 13 0 γ12 ν −E µ −E 0 0 0 1 E µ −E 0 0 0 µ −E n E 0 0 0 0 0 1 Z 0 0 0 0 0 1 Z 0 0 0 0 0 2(1+ν) E σ 11 σ22 σ33 τ23 τ 13 τ12 (3.2) dove le cinque costanti hanno il seguente significato E `e il modulo di elasticit` a nel piano di isotropia, n= E E3 `e il rapporto fra i moduli di elasticit` a nel piano di isotropia e lungo l’asse normale, ν `e il coefficiente di contrazione trasversale di Poisson nel piano di isotropia, 26 3 – Il caso di legame ortotropo µ `e il coefficiente di contrazione trasversale di Poisson nei piani paralleli a x3 , Z il modulo di elasticit` a tangenziale in piani paralleli all’asse x3 . Il legame costitutivo su cui `e impostato questo lavoro di tesi `e invece quello seguente, caratterizzato dal fatto che per ogni punto passano tre piani di simmetria elastica, ortogonali fra loro. Tale legame `e indicato col nome di legame ortotropo. Scegliendo un sistema di riferimento con gli assi normali ai piani di simmetria, le equazioni di legame hanno la forma 1 ε 11 E1 ε22 − ν12 E1 ε33 − νE131 = γ23 0 γ 0 13 0 γ12 − νE212 − νE313 0 0 0 1 E2 − νE323 0 0 0 − νE232 1 E3 0 0 0 0 0 1 G23 0 0 0 0 0 1 G13 0 0 0 0 0 1 G12 σ 11 σ22 σ33 τ23 τ 13 τ12 (3.3) In queste equazioni compaiono 12 costanti elastiche, ma soltanto 9 di esse sono indipendenti, perch`e vale la relazione di simmetria νji νij = . Ei Ej (3.4) ` da notare che in generale νij 6= νji . E 3.2 Caratteristiche meccaniche di alcuni materiali ortotropi Nel contesto dei materiali anisotropi non si pu` o tralasciare un breve riferimento alla categoria dei compositi, gi` a introdotti nel primo capitolo. Un materiale fibro-rinforzato pu` o essere visto, con qualche approssimazione, come un mezzo omogeneo elastico anisotropo, con certe caratteristiche di simmetria, in dipendenza della simmetria dei rinforzi. Alcuni materiali utilizzati nelle costruzioni navali, con matrice rinforzata da fibre di vetro, possono essere descritti attraverso un modello ortotropo [19]. Di seguito, nella tabella 3.1, sono riportate le caratteristiche elastiche di quattro materiali compositi. 27 3 – Il caso di legame ortotropo Costanti elastiche Fibro-rinforzato unidirezionale Laminato con rinforzi ortogonali Laminato a caldo Composito in fibre di vetro e poliestere E1 · 10−5 E2 · 10−5 E3 · 10−5 G12 · 10−5 G23 · 10−5 G31 · 10−5 ν12 ν23 ν31 1.40 1.40 5.70 0.50 0.57 0.57 0.400 0.068 0.277 2.68 1.10 3.68 0.41 0.45 0.50 0.431 0.405 0.105 2.93 1.83 3.59 0.63 0.66 0.76 0.371 0.157 0.177 1.31 0.43 1.79 0.24 0.24 0.28 0.31 0.08 0.15 Tabella 3.1. Costanti elastiche di alcuni compositi in fibre di vetro (moduli in Kgf /cm2 ). Il primo `e composto da una matrice rinforzata con fibre parallele unidirezionali. La rigidezza `e massima nella direzione dei rinforzi. Il materiale pu` o essere visto come trasversalmente isotropo, con i piani di isotropia normali alle fibre. Il secondo `e un laminato composto da strati di fibre parallele, sovrapposti in modo alternato. Il terzo `e un materiale plastico laminato a caldo con fibre di vetro. L’ultimo presenta una matrice in poliestere rinforzata con fibre di vetro. Nei materiali ortotropi i nove coefficienti elastici che definiscono il legame sono indipendenti. A parte i limiti imposti dalla considerazione che la matrice di legame deve essere definita positiva, essi variano generalmente in un campo di valori limitato, come riportato da Tolf [26]. Considerando alcuni compositi in fibre e matrici, comunemente utilizzati in campo strutturale, vengono generalmente rispettate le seguenti proporzionalit` a: 0.03 < 2G13 ν32 < 0.1; E3 dove i valori pi` u bassi si hanno per compositi in fibre di carbonio e quelli pi` u alti per compositi in fibre di vetro. Inoltre 0.5 < G23 < 2, G13 1< E3 < 20, E1 10 < E3 < 50; G13 28 3 – Il caso di legame ortotropo dove x3 indica l’asse longitudinale e il piano x1 x2 `e il piano della sezione normale. Oltre a questa categoria di materiali per cui sono disponibili direttamente le nove costanti elastiche, il legame ortotropo pu` o essere utile nella descrizione del comportamento di laminati. Anche se le lamine hanno singolarmente un comportamento trasversalmente isotropo, il materiale che risulta dal loro assemblaggio, dopo la necessaria omogeneizzazione, non `e trasversalmente isotropo a causa delle diverse orientazioni e degli strati di incollaggio. Il legame ortotropo pu` o invece rappresentare un utile modello per tener conto delle diverse risposte direzionali all’interno della stessa sezione trasversale. Conoscendo le propriet` a delle lamine e le modalit` a del loro assemblaggio `e possibile ricavare delle costanti globali per il composito ortotropo. Nella tabella 3.2 sono riportate alcune caratteristiche meccaniche di materiali compositi trasversalmente isotropi. Materiale EL ET νLT GLT Carbon-Epoxy T300/N5309 Carbon-Epoxy AS4/H3501 Carbon-Epoxy IM6/Epoxy Carbon-Epoxy T300 Fiberite Glass-Epoxy USN150 Carbon fiber prepreg Carbon-Epoxy Fib 150/42 Ciba-Geigy C6000/R6376 graphite/epoxy 181 138 203 148 38.6 140 109 147 10.30 8.96 11.20 9.65 8.27 10.5 8.82 10.62 0.28 0.30 0.32 0.30 0.26 0.30 0.34 0.33 7.17 7.10 8.40 4.55 4.14 6.10 4.32 5.45 Tabella 3.2. Propriet` a meccaniche di alcuni compositi fibro-rinforzati trasversalmente isotropi. Dopo aver introdotto i principali modelli di legame, e aver riportato le caratteristiche di diversi materiali utilizzati nella tecnica, nella sezione successiva viene affrontato il comportamento di un solido di De Saint Venant con legame costitutivo ortotropo. 3.3 Formulazione del problema Si supponga di riformulare le stesse ipotesi alla base del paragrafo 2.1, comprese le supposizioni sulle tensioni. Le equazioni indefinite di equilibrio portano nuovamente alle (2.1). Le equazioni di compatibilit` a in termini di tensione fornite nel primo capitolo hanno alla 29 3 – Il caso di legame ortotropo base l’ipotesi di isotropia elastica. Nel caso ortotropo tali equazioni non sono pi` u valide ed `e necessario ricavare le nuove espressioni. Dalle equazioni di compatibilit` a interna si ha ε11,22 + ε22,11 = γ12,12 , (3.5a) ε11,33 + ε33,11 = γ13,13 , (3.5b) ε22,33 + ε33,22 = γ23,23 , (3.5c) ε11,23 = 1 2 (γ12,13 + γ13,12 − γ23,11 ), (3.5d) ε22,13 = 1 2 (γ12,23 + γ23,12 − γ13,22 ), (3.5e) ε33,21 = 1 2 (γ13,23 + γ23,13 − γ12,33 ). (3.5f) Esprimendole in termini delle componenti di tensione, tenendo conto delle ipotesi fatte, delle equazioni di legame (3.3) e delle (2.1), si ha ν31 ν32 σ33,22 − σ33,11 E3 E3 ν31 1 − σ33,33 + σ33,11 E3 E3 ν32 1 − σ33,33 + σ33,22 E3 E3 ν31 − σ33,23 E3 ν32 σ33,13 − E3 1 σ33,21 E3 − = 0, (3.6a) = 1 G13 τ13,13 = 0, = 1 G23 τ23,23 = 0, 1 2 = = 1 2 = 1 2 1 G13 τ13,12 − 1 G23 τ23,12 − 1 G13 τ13,23 + (3.6b) (3.6c) 1 G23 τ23,11 1 G13 τ13,22 1 G23 τ23,13 , (3.6d) , (3.6e) = 0. (3.6f) Poich`e dalle (2.1) abbiamo σ33,33 = 0, otteniamo ν31 σ33,23 E3 ν32 − σ33,13 E3 − ν31 σ33,22 + ν32 σ33,11 = 0, (3.7a) σ33,11 = 0, (3.7b) σ33,22 = 0, 1 1 1 = τ13,12 − τ23,11 , 2 G13 G23 1 1 1 = τ23,12 − τ13,22 , 2 G23 G13 (3.7c) σ33,21 = 0. 30 (3.7d) (3.7e) (3.7f) 3 – Il caso di legame ortotropo Come suggerisce Sokolnikoff [24] per la sollecitazione di torsione, una trattazione pi` u agevole del caso ortotropo pu` o essere svolta riferendosi ad un piano di calcolo [ξ,η] definito dalla trasformazione di coordinate ξ= r G23 x1 , G13 η = x2 ; (3.8) Il piano di calcolo `e quindi ottenuto deformando la direzione x1 del piano (x1 ,x2 ) della sezione attraverso un fattore R= r G23 G13 (3.9) La trasformazione di coordinate comporta le seguenti relazioni fra le derivate parziali 1 f [x1 ,x2 ],1 , R (3.10a) f [ξ,η],η = f [x1 ,x2 ],2 . (3.10b) f [ξ,η],ξ = Per semplicit` a di notazione si indicano σ33 , τ31 e τ32 con σ, τ1 e τ2 rispettivamente. Esprimendo la (3.7d) tramite la (2.1c) si ha ν31 1 − σ,23 = E3 2 1 1 (−σ,23 − τ2,22 ) − (τ2,11 ) G13 G23 (3.11) passando al piano di calcolo σ,3η ν31 1 − 2G13 E3 =− 1 (τ2,ηη + τ2,ξξ ) 2G13 (3.12) semplificando si ottiene infine σ,3η 2G13 ν31 − 1 = 52ξη τ2 , E3 (3.13) dove l’operatore laplaciano 52ξη `e inteso come somma delle derivate parziali rispetto a ξ ed η. Allo stesso modo, esprimendo la (3.7e) tramite la (2.1c) si ha − ν32 1 σ,13 = E3 2 1 1 (−σ,13 − τ1,11 ) − (τ1,22 ) G23 G13 (3.14) passando al piano di calcolo Rσ,3ξ ν32 1 − 2G23 E3 =− 31 1 (τ1,ξξ + τ1,ηη ) 2G13 (3.15) 3 – Il caso di legame ortotropo semplificando infine si ha Rσ,3ξ 1 2G13 ν32 − 2 E3 R = 52ξη τ1 , (3.16) Come si `e proceduto nel caso di legame isotropo, dalle equazioni (3.7a)-(3.7c), (3.7f) e (2.1) si ottiene che, nel piano di calcolo, la tensione σ ha l’espressione generica σ = a + a1 ξ + a2 η − x3 (b + b1 ξ + b2 η) (3.17) dove abbiamo introdotto sei costanti incognite. Sostituendo l’espressione di σ nelle equazioni (2.1c), (3.13) e (3.16) si ha Rτ1,ξ + τ2,η = b + b1 ξ + b2 η, 2G13 ν31 −b2 − 1 = τ2,ξξ + τ2,ηη , E3 1 2G13 ν32 − 2 = τ1,ξξ + τ1,ηη . −Rb1 E3 R (3.18) (3.19) (3.20) Operando sul sistema, si deriva la (3.18) rispetto a η e si somma l’equazione ottenuta alla (3.19). Rτ1,ξη + τ2,ηη − b2 2G13 ν31 − 1 = b2 + τ2,ξξ + τ2,ηη E3 (3.21) Le derivate rispetto a ξ possono essere raggruppate (τ2,ξ − Rτ1,η ),ξ = − 2G13 ν31 b2 . E3 (3.22) Si deriva la (3.18) anche rispetto a ξ e si somma l’equazione ottenuta alla (3.20) moltiplicata per R. Rτ1,ξξ + τ2,ξη − b1 2G23 ν32 − 1 = b1 + Rτ1,ξξ + Rτ1,ηη E3 (3.23) Le derivate rispetto a η possono essere raggruppate 2G23 ν32 b1 . E3 (3.24) 2G13 ν31 2G23 ν32 b2 dξ + b1 dη, E3 E3 (3.25) (τ2,ξ − Rτ1,η ),η = Dalle equazioni (3.22) e (3.24) si ha d(τ2,ξ − Rτ1,η ) = − 32 3 – Il caso di legame ortotropo che integrata fornisce τ2,ξ − Rτ1,η = m2 b1 η − m1 b2 ξ + c; (3.26) dove c `e un’ulteriore costante e con m1 e m2 sono indicati i coefficienti elastici m1 = 2G13 ν31 , E3 m2 = 2G23 ν32 E3 Dalle equazioni (3.18) e (3.26) otteniamo un problema differenziale del tipo Rτ1,ξ + τ2,η = b + b1 ξ + b2 η, τ2,ξ − Rτ1,η = m2 b1 η − m1 b2 ξ + c; (3.27) (3.28) La soluzione di questo problema pu` o essere scissa nella somma di due termini: una soluzione particolare del sistema, pi` u la soluzione del problema omogeneo associato. τ1 = τ¯1 + τ10 , (3.29a) τ2 = τ¯2 + τ20 . (3.29b) 0 0 + τ2,η =0 Rτ1,ξ (3.30a) 0 0 τ2,ξ − Rτ1,η =0 (3.30b) Si ha dunque Osservando la (3.30b) `e possibile definire una funzione scalare ϕ[ξ,η] tale che τ10 = ϕ,ξ , τ20 = Rϕ,η . (3.31) mentre la (3.30a) conduce a 52ξη ϕ(ξ,η) = 0. (3.32) La funzione scalare `e armonica nel piano di calcolo. Imponendo le condizioni al contorno puntuali sulla superficie laterale del cilindro, si ha τ1 n1 + τ2 n2 = 0, (3.33) scindendo le τ nei due termini e passando al piano di calcolo τ1 nξ + τ¯2 nη ). Rτ10 nξ + τ20 nη = −(R¯ 33 (3.34) 3 – Il caso di legame ortotropo In termini della funzione scalare ϕ la condizione al contorno `e Rϕ,ν = (R¯ τ1 nξ + τ¯2 nη ), (3.35) dove ϕ,ν indica la derivata sul contorno, rispetto alla normale nel piano di calcolo. Due soluzioni particolari del sistema (3.28) possono essere riconosciute nelle funzioni τ¯1 = 1 2R τ¯2 = 1 2 bξ + b1 ξ 2 − m2 η 2 − cη , (3.36a) bη + b2 η 2 − m1 ξ 2 + cξ . (3.36b) Come nel caso isotropo, centrando il sistema di riferimento nel baricentro della sezione, la costante b ha valore nullo. Sostituendo le soluzioni particolari nella (3.35) si ha Rϕ,ν = − 1 2 b1 ξ 2 − m2 η 2 − cη nξ − b2 η 2 − m1 ξ 2 + cξ nη (3.37) mettendo in evidenza le costanti di integrazione b1 ϕ,ν = − 2R ξ 2 − m2 η 2 nξ b2 − 2R η 2 − m1 ξ 2 nη (3.38) c + 2R (ηnξ − ξnη ), Il problema al contorno per la ϕ pu` o essere scisso, similmente al caso isotropo, in tre sottoproblemi per tre funzioni ϕ1 ,ϕ2 e ϕt armoniche nel piano di calcolo, tali che ϕ=− b1 b2 c ϕ1 − ϕ2 + ϕt . 2R 2R 2R (3.39) Le condizioni al contorno da applicare a queste nuove funzioni armoniche sono indipendenti dalle costanti di integrazione ϕ1,ν = (ξ 2 − m2 η 2 )nξ , (3.40a) ϕ2,ν = (η 2 − m1 ξ 2 )nη , (3.40b) ϕt,ν = (ηnξ − ξnη ). (3.40c) Le tensioni tangenziali τ1 e τ2 possono essere espresse in dipendenza delle tre funzioni scalari appena introdotte. τ1 = τ2 = b1 2 2R (ξ − m2 η 2 − ϕ1,ξ ) + b1 2 (−ϕ1,η ) + b2 2 2 (η b2 2R (−ϕ2,ξ ) + c 2R (ϕt,ξ − η), − m1 ξ 2 − ϕ2,η ) + 2c (ϕt,η + ξ). 34 (3.41a) (3.41b) 3 – Il caso di legame ortotropo 3.4 Determinazione delle costanti Dalle (2.25), analogamente al caso isotropo, si pu` o ricavare l’espressione delle costanti in funzione delle caratteristiche della sollecitazione sulla sezione. Sostituendo l’espressione (3.17) in (2.25c)-(2.25e), e tenendo conto che nel sistema baricentrico i momenti statici rispetto agli assi hanno valore nullo, si ha N= M10 = aΩ, (3.42) a1 RJ12 + a2 J11 , (3.43) M20 = −a2 J12 − a1 RJ22 . (3.44) dove con M 0 si indicano i momenti agenti sulla base Ω0 (x3 =0). Le prime tre costanti hanno quindi valore N Ω, a= (3.45a) 1 a1 = − RD (M10 J12 + M20 J11 ), a2 = 1 0 D (M2 J12 + M10 J22 ); (3.45b) (3.45c) 2 dove D = J11 J22 − J12 . Dall’equilibrio globale del cilindro si ha M1 = M10 + T20 x3 , M2 = M20 − T10 x3 . (3.46) Confrontando l’equazione (3.46) con (2.25d)-(2.25e) e (3.17) si ottengono i valori delle costanti b1 e b2 in funzione delle caratteristiche taglianti b1 = −(DR)−1 (T1 J11 − T2 J12 ), −D−1 (T2 J22 − T1 J12 ). b2 = (3.47a) (3.47b) Per quanto riguarda l’ultima costante c si possono utilizzare le (3.41) nella (2.25f). Si ottiene cos`ı una relazione fra Mt ,b1 ,b2 e c. Esprimendo l’equazione in termini delle tre funzioni scalari si ha Mt = b1 1 2R ( R R Ω0 b2 1 + 2R (R c 1 + 2R (R (ϕ1,ξ η − ϕ1,η ξ)dΩ 0 − R2 J122 + m2 J111 ) R Ω 0 (ϕ2,ξ η R Ω0 − ϕ2,η ξ)dΩ 0 + RJ112 − R3 m1 J222 ) (ϕt,η ξ − ϕt,ξ η)dΩ 0 + R2 J22 + J11 ). 35 (3.48) 3 – Il caso di legame ortotropo dove R Ω0 dΩ 0 indica l’integrale calcolato nel piano [ξ,η] ed i momenti del secondo e terzo ordine sono calcolati nel piano reale [x1 ,x2 ]. 3.5 La torsione In questo caso di sollecitazione le costanti b1 e b2 sono nulle e Mt dipende esclusivamente dalla costante c. Il problema differenziale da risolvere, come gi` a evidenziato nei precedenti paragrafi, `e un problema di Neumann 52 ϕt = 0, in Ω (3.49) ϕt,ν = (ηnξ − ξnη ), su Γ L’equazione (3.48), specializzata al caso di torsione pura, fornisce Z c 1 ( Mt = (ϕt,η ξ − ϕt,ξ η)dΩ 0 + R2 J22 + J11 ). 2R R Ω 0 L’integrale pu` o essere ricondotto, come nel caso isotropo, ad un integrale di Dirichlet. Z c 1 R2 J22 + J11 − (ϕ2t,ξ + ϕ2t,η )dΩ 0 , Mt = 2R R Ω0 esprimendo nel piano di calcolo [ξ,η] i momenti di inerzia della sezione si ha Z c 0 2 2 0 J . Mt = − (ϕ + ϕ )dΩ 0 t,ξ t,η 2R2 Ω0 (3.50) (3.51) (3.52) dove J00 indica il momento polare rispetto al baricentro nel piano di calcolo. Le tensioni tangenziali dipendono solo dalle derivate di ϕt τ1 = c 2R (ϕt,ξ τ2 = c 2 (ϕt,η − η), (3.53a) + ξ). (3.53b) Per determinare la costante c ed il suo significato fisico sono necessarie alcune considerazioni sullo stato di deformazione. Nel caso di torsione pura le uniche componenti non nulle di deformazione sono ε31 e ε32 . Dalle (2.38), si nota che la rotazione assiale ω21 ha variazioni nulle lungo x1 e lungo x2 . La sua variazione lungo l’asse x3 ha invece l’espressione ω21,3 = ε32,1 − ε31,2 = = Rc 4G32 (ϕt,ηξ + 1) − Rτ2,ξ 2G32 c 4RG31 (ϕt,ηξ 36 − τ1,η 2G31 − 1) = = c 2RG31 (3.54) = θ, 3 – Il caso di legame ortotropo dove θ rappresenta l’angolo unitario di torsione. Sostituendo in (3.52) l’espressione trovata per c si ha Mt = θG31 0 (J0 − D[ϕt ]) . R (3.55) In questa equazione si riconosce, nel termine in parentesi, l’inerzia torsionale nel piano di calcolo, esprimibile con un integrale calcolato solo sul contorno nel piano [ξ,η]. (J00 − D[ϕt ]) = Z J00 − ϕt ϕt,ν dΓ 0 Γ0 = Jt0 . (3.56) La rigidezza torsionale `e pari a Mt /θ e nel caso isotropo si ha Mt /θ = GJt , dove G `e il ´ possibile riscrivere anche nel caso ortotropo modulo di elasticit` a tangenziale. E Mt = GJt , θ (3.57) attribuendo per` o a G il seguente significato G= G31 Jt0 · R Jt (3.58) Il valore di G dipende dunque sia dalle caratteristiche meccaniche, sia da come esse sono orientate rispetto alla geometria. Sviluppando le (3.53) si ottiene infine l’espressione delle tensioni tangenziali che insorgono in un cilindro ortotropo a causa di un momento torcente τ1 = G31 θ(ϕt,ξ − η), τ2 = RG31 θ(ϕt,η + ξ). (3.59a) (3.59b) Tutte le grandezze di interesse nel problema della torsione sono state ottenute in funzione del campo scalare ϕt . Delle nove costanti elastiche indipendenti del materiale solo G31 e G32 sono determinanti nel problema della torsione. In particolare, operando sulle (3.59), si pu` o notare che l’unico parametro meccanico influente sul calcolo delle tensioni `e la radice del rapporto dei moduli tangenziali R, e non i singoli valori. In questo problema non entrano in gioco n`e i moduli di elasticit` a di Young, n`e i coefficienti di contrazione trasversale. Queste costanti intervengono invece nella determinazione dello stato tensionale in un problema di taglio. 37 3 – Il caso di legame ortotropo 3.6 Il taglio Tramite le considerazioni sull’equilibrio globale alla rotazione del cilindro fatte nel primo capitolo e dall’esame delle (3.45), le costanti a1 e a2 hanno l’espressione a1 = l RD (T2 J12 a2 = l D (T1 J12 − T1 J11 ), (3.60a) − T2 J22 ). (3.60b) Confrontando le espressioni ottenute, con le (3.47) si ha a1 = lb1 , a2 = lb2 . (3.61) Come nel caso della torsione, il valore della costante c `e pari a 2RG31 θ, ma in questo caso generale θ `e diverso dalla derivata lungo x3 della rotazione assiale. Si pu` o esprimere ω21,3 come nella (3.54) ω21,3 = ε32,1 − ε31,2 = Rτ2,ξ τ1,η − . 2G32 2G31 (3.62) Utilizzando la forma generale assunta dalle τ si ha ω21,3 = + 2GR32 − b21 ϕ1,ηξ − b2 m1 ξ − b1 − 2G131 − 2R ϕ1,ηξ + b1 R m2 η b2 2 ϕ2,ηξ − + 2c (ϕt,ηξ + 1) b2 2R ϕ2,ηξ + c 2R (ϕt,ηξ − 1) . (3.63) semplificando i termini che coinvolgono ϕ1 e ϕ2 abbiamo infine ω21,3 = c 1 − (b2 m1 ξ + b1 m2 η) , 2RG31 2RG31 (3.64) da cui si deduce che ω21,3 `e formata quindi da due contributi: uno di tipo torsionale ed uno prettamente tagliante. Sostituendo in (3.41) l’espressione di c si ha b1 2 b2 (ξ − m2 η 2 − ϕ1,ξ ) − ϕ2,ξ , 2R 2R b2 b1 + ξ) + (η 2 − m1 ξ 2 − ϕ2,η ) − ϕ1,η . 2 2 τ1 = G31 θ(ϕt,ξ − η) + (3.65a) τ2 = RG31 θ(ϕt,η (3.65b) Per poter scindere gli effetti torsionali da quelli taglianti, come si `e proceduto nel caso isotropo, `e necessario conoscere le coordinate del centro di taglio. La posizione del centro di taglio (¯ x1 ,¯ x2 ) pu` o essere determinata dalla condizione Z (x1 τ2 − x2 τ1 )dΩ = T2 x¯1 − T1 x¯2 , Ω 38 ∀T1 ,T2 . (3.66) 3 – Il caso di legame ortotropo Sostituendo nell’integrale le espressioni (3.65) e ponendo θ = 0 (taglio puro con rotazione assiale media nulla) si ha R Ω (x1 ( b22 (η 2 − m1 ξ 2 − ϕ2,η ) − b1 −x2 ( 2R (ξ 2 − m2 η 2 − ϕ1,ξ ) − b1 2 ϕ1,η ) b2 2R ϕ2,ξ ))dΩ (3.67) = T2 x ¯1 − T1 x ¯2 ; Esprimendo le bi in funzione delle caratteristiche taglianti si ha T2 2R2 D J22 R +J12 R + m1 ξ 2 − η 2 ) − ηϕ2,ξ )dΩ 0 + m2 η 2 − ξ 2 ) − ξϕ1,η )dΩ 0 Ω 0 (ξ(ϕ2,η (η(ϕ1,ξ R − 2RT21D J12 Ω 0 (ξ(ϕ2,η + m1 ξ 2 − η 2 ) − ηϕ2,ξ )dΩ 0 R +J11 Ω 0 (η(ϕ1,ξ + m2 η 2 − ξ 2 ) − ξϕ1,η )dΩ 0 Ω0 (3.68) = T2 x ¯1 − T1 x ¯2 ; Dovendo valere per ogni T1 e T2 , abbiamo x ¯1 = 1 (J22 S2 + J12 S1 ), D x ¯2 = 1 D (J12 S2 (3.69) + J11 S1 ). con S1 = S2 = D= 1 R2 R + m2 η 2 − ξ 2 ) − ξϕ1,η )dΩ 0 (3.70a) 1 R2 R + m1 ξ 2 − η 2 ) − ηϕ2,ξ )dΩ 0 (3.70b) Ω 0 (η(ϕ1,ξ Ω 0 (ξ(ϕ2,η 2 (J11 J22 − J12 ) (3.70c) Per quanto riguarda le caratteristiche meccaniche influenti sulla determinazione delle tensioni e del centro di taglio, vengono coinvolti solo tre coefficienti: la radice del rapporto fra i moduli tangenziali R, e i due coefficienti m1 e m2 definiti dalle (3.27). Dopo aver espresso in forma differenziale il problema ortotropo di De Saint Venant, nel prossimo capitolo viene affrontata la descrizione dello stesso in forma integrale sul contorno. Tale forma costituisce la base per l’applicazione dei metodi numerici ad elementi di contorno. 39 Capitolo 4 Formulazione integrale sul contorno La distribuzione delle tensioni tangenziali in un problema di De Saint Venant per un cilindro ortotropo `e stata ricondotta alla determinazione di tre funzioni scalari definite dai problemi differenziali seguenti 52 ϕt = 0, in Ω ϕt,ν = (ηnξ − ξnη ), su Γ 52 ϕ1 = 0, in Ω ϕ1,ν = (ξ 2 − m2 η 2 )nξ , su Γ 52 ϕ2 = 0, in Ω ϕ2,ν = (η 2 − m1 ξ 2 )nη , su Γ (4.1) (4.2) (4.3) La ricerca di soluzioni approssimate mediante tecniche numeriche si basa su una formulazione debole del problema, in cui `e richiesta minore continuit` a alla funzione incognita. L’obiettivo di questo capitolo `e di ricondurre la formulazione differenziale ad una forma integrale sul contorno, punto di partenza per una discretizzazione ad elementi di contorno. 40 4 – Formulazione integrale sul contorno 4.1 Forme integrali deboli Una funzione ϕ `e detta armonica in un dominio Ω quando soddisfa in esso l’equazione di Laplace, e quindi si ha 52 ϕ = 0 (4.4) Il problema da risolvere consiste nel cercare una funzione ϕ[x1 ,x2 ] armonica nel dominio Ω e la cui derivata normale sul contorno ϕ,n `e nota, e sar` a quindi indicata con ϕ¯,n . Questo problema pu` o essere riformulato in forma integrale dopo aver pesato l’equazione mediante una funzione w, che ha il ruolo di distribuire l’errore all’interno del dominio. Z 52 ϕwdΩ = 0, in Ω (4.5) Ω Raramente la (4.5) viene usata in questa forma. Si preferisce in realt` a usare una formulazione debole del problema, ottenuta mediante integrazioni per parti alla Gauss. A seconda del grado di indebolimento e del tipo di funzione peso scelta si distinguono i vari metodi fra loro. Integrando per parti l’equazione dei residui pesati si ha Z 52 ϕwdΩ = Ω Z (−ϕ,1 w,1 − ϕ,2 w,2 )dΩ + Ω Z ϕ¯,n wdΓ = 0, (4.6) Γ Questa forma debole `e il punto di partenza per una discretizzazione ad elementi finiti e si presta ad una formulazione simmetrica alla Galerkin. In quest’ultima si utilizzano funzioni peso coincidenti con le funzioni di interpolazione e il sistema algebrico risultante ha il vantaggio di presentare una matrice dei coefficienti simmetrica, bandata e definita positiva. Spostando ulteriormente il grado di derivazione sulla funzione peso, e cio`e integrando nuovamente per parti, si giunge a Z 2 ϕ 5 wdΩ + Ω Z ϕ¯,n wdΓ − Γ Z ϕw,n dΓ = 0. (4.7) Γ Questa equazione `e alla base del metodo agli elementi di contorno e pu` o essere ricavata, oltre che col metodo dei residui pesati, anche mediante il teorema di reciprocit` a di Betti. 41 4 – Formulazione integrale sul contorno 4.2 Equazione integrale sul contorno e soluzione fondamentale Volendo ottenere un’equazione integrale sul contorno, si deve scegliere w in modo che soddisfi l’equazione di Laplace, o che comunque consenta di non calcolare l’integrale di dominio. Una funzione del genere potrebbe essere quella che soddisfa l’equazione 52 w = −∆i , (4.8) dove ∆i indica la funzione di Dirac, nulla in tutti i punti tranne che in xi , e tale che Z ∆i dΩ = 1, (4.9) Ω per ogni Ω che contiene il punto xi . La funzione peso `e rappresentata, nel metodo agli elementi di contorno, dalla soluzione fondamentale ϕ∗ . Essa rappresenta il campo generato da un carico unitario posizionato in xi , i cui effetti si propagano all’infinito, senza condizioni al contorno. Soddisfa cio`e l’equazione 52 ϕ∗ + ∆i = 0, (4.10) per cui si ha Z 2 ϕ5 ϕ ∗ dΩ = − Z Ω ϕ∆i dΩ = −ϕi . (4.11) Ω L’equazione (4.7) diviene quindi ϕi + Z ϕϕ∗,n dΓ = Γ Z ϕ¯,n ϕ∗ dΓ, (4.12) Γ in cui compaiono soltanto integrali calcolati sul contorno. Poich`e ϕ∗ e ϕ∗,n corrispondono ad una particolare posizione della funzione di Dirac, ossia della sorgente, per ogni posizione diversa della sorgente si ha una nuova equazione integrale sul contorno. La soluzione fondamentale dell’equazione (4.10), per un dominio bidimensionale isotropo, `e ϕ∗ = 1 ln 2π 42 1 , r (4.13) 4 – Formulazione integrale sul contorno dove r `e la distanza tra il punto sorgente xi e il punto in considerazione. Per quanto riguarda il flusso normale si ha ϕ∗,n = ϕ∗,r r,n = − 1 r,n . 2πr (4.14) L’equazione (4.12) `e valida per ogni punto appartenente al dominio Ω. Con l’idea di generare un problema in cui le incognite sono solo sul contorno, si deve posizionare anche la sorgente su di esso, nonostante questo provochi l’insorgenza di alcune singolarit` a negli integrali. Per esaminare cosa succede quando il punto sorgente tende al contorno, si considera il dominio allargato mediante un semicerchio di raggio ε, centrato sulla sorgente. Il raggio ε `e poi fatto tendere a zero, specializzando la (4.12) per un punto su Γ . Figura 4.1. Il dominio viene allargato mediante un semicerchio di raggio ε. L’integrale su Γε presente sulla destra della (4.12) ha un grado di singolarit` a basso e apporta un contributo nullo lim ε→0 Z ϕ¯,n ϕ∗ dΓ Γε = lim Z − ε→0 ϕ¯,n Γε 1 ln(ε)dΓ 2π 1 −ϕ¯,n εln(ε)dΓ = 0; ε→0 2 = lim (4.15) L’integrale su Γε presente a sinistra nell’equazione (4.12) si comporta in modo diverso lim ε→0 Z ϕϕ∗,n dΓ Γε Z = lim − ε→0 1 dΓ ϕ 2πε Γε πε 1 = lim −ϕ = − ϕi ; ε→0 2πε 2 (4.16) d` a quindi origine ad un contributo puntuale, detto termine libero. L’equazione (4.12), specializzata al caso di sorgente presa sul contorno, porta quindi alla seguente espressione: 1 i ϕ + 2 Z ϕϕ∗,n dΓ = Γ Z ϕ¯,n ϕ∗ dΓ, Γ 43 (4.17) 4 – Formulazione integrale sul contorno dove gli integrali sono intesi nel senso del valore principale di Cauchy. Per risolvere numericamente questa equazione `e necessario ipotizzare una distribuzione per le ϕ sul contorno, assumendo una funzione di interpolazione. Posizionando la sorgente in vari punti lungo il contorno e sfruttando pi` u equazioni di questo tipo, si ottiene un sistema algebrico non simmetrico. In generale sul contorno si hanno condizioni sia sul potenziale che sulla sua derivata normale. Gli integrali su Γ sono quindi da separare in integrali su Γu e integrali su Γq . Il vettore delle incognite contiene sia termini potenziali che termini di flusso ed il metodo ha quindi in s`e una formulazione mista. Questa caratteristica ha il pregio di portare ad accuratezze in genere confrontabili, nel calcolo di spostamenti e tensioni. Ci` o non accade invece con formulazioni in termini di spostamenti. 44 Capitolo 5 Discretizzazione ad elementi di contorno I fondamenti e le applicazioni di questo metodo sono affrontati in diversi testi riportati in bibliografia ([1], [3], [8], [9]). In questo capitolo il metodo viene illustrato nel contesto meccanico in considerazione: l’equazione di Laplace. Operare una discretizzazione del contorno implica una suddivisione dello stesso in elementi, con l’assunzione di funzioni di interpolazione. Per illustrare i fondamenti generali del metodo si assume per semplicit` a che il contorno del corpo sia suddiviso in N elementi lineari. Dopo aver discretizzato il contorno si genera un numero di equazioni uguale al numero dei parametri che definiscono l’interpolazione della funzione incognita. Si ottiene in tal modo il sistema algebrico da cui ricavare il vettore dei parametri incogniti. 5.1 Discretizzazione del contorno I punti dell’elemento in cui si valutano i parametri incogniti da interpolare sono detti nodi. L’equazione (4.17) pu` o essere riscritta come N Z N Z X 1 i X ϕ + ϕϕ∗,n dΓ = ϕ¯,n ϕ∗ dΓ, 2 j=1 Γj j=1 Γj 45 (5.1) 5 – Discretizzazione ad elementi di contorno dove al posto di un singolo integrale sul contorno si `e sostituita la sommatoria di integrali calcolati sui segmenti. Supponendo di utilizzare elementi con interpolazione costante, ϕ e ϕ¯,n possono essere rinominati ϕj e ϕ¯j,n e possono essere portati fuori dal segno di integrale. ! ! Z Z N N X 1 i X ϕ + ϕ∗,n dΓ ϕj = ϕ∗ dΓ ϕ¯j,n ; 2 Γ Γ j j j=1 j=1 (5.2) ci sono quindi due tipi di integrali ricorrenti, da calcolare su ogni elemento hij = Z ϕ∗,n dΓ Gij = Z Γj ϕ∗ dΓ. (5.3) Γj Questi integrali legano il nodo i (in cui sta agendo la sorgente) al nodo j, detto punto di campo. Il risultato degli integrali `e quindi una sorta di coefficiente di influenza. Per ogni sorgente i si ha N N 1 i X ij j X ij j ϕ + h ϕ = G ϕ¯,n . 2 j=1 j=1 5.2 (5.4) Generazione del sistema algebrico Facendo variare la posizione della sorgente su ogni elemento, da 1 ad N, si ottiene un sistema di N equazioni nelle N incognite ϕi , ammesso che le derivate normali sul contorno siano note come nei casi esaminati nei precedenti capitoli. Rinominando H ij = hij , se i 6= j hij + 1 , se 2 i=j (5.5) possiamo riscrivere la (5.4) come N X j=1 H ij ϕj = N X Gij ϕ¯j,n , (5.6) j=1 e in forma matriciale HΦ=b 46 (5.7) 5 – Discretizzazione ad elementi di contorno dove H `e una matrice N × N che contiene gli integrali (5.5) e i componenti del termine noto b sono definiti dal secondo membro della (5.6), mentre Φ `e il vettore delle incognite, di lunghezza N. Nei problemi differenziali caratterizzati da condizioni al contorno miste, H e b sono costituite da contributi integrali della soluzione fondamentale o della sua derivata, a seconda della condizione al contorno specifica. In questi casi anche il vettore delle incognite contiene termini misti. Nel problema in esame invece, il vettore delle incognite coincide con il vettore dei termini potenziali Φ ed `e ricavabile dal sistema algebrico (5.7). Una volta ottenuti i valori sul contorno `e possibile ricavare potenziale o flussi in punti interni, applicando nel punto desiderato la sorgente. Discretizzando la (4.12) si ottiene ϕi = N X Gij ϕ¯j,n − j=1 N X hij ϕj , (5.8) j=1 dove potenziali e flussi normali sul contorno sono ormai noti, ma i 2N coefficienti Gij e hij vanno ricalcolati tenendo conto della nuova posizione della sorgente. Per calcolare il flusso interno ad esempio lungo la direzione x1 `e necessario derivare nella (4.12) soltanto i termini ϕ∗ e ϕ∗,n , che sono i soli termini influenzati da una variazione del punto sorgente. Si ha ϕi,1 = Z N X j=1 ϕ∗,1 dΓ ! ϕ¯j,n Γj − Z N X j=1 ϕ∗,n1 dΓ ! ϕj ; (5.9) Γj Tutti i coefficienti integrali possono essere calcolati sia numericamente, mediante punti di Gauss, sia analiticamente. L’accuratezza con cui vengono valutati gli integrali influisce sull’efficienza del modello e la presenza di situazioni singolari rende delicato il calcolo. ´ facile da implementare e in alcuni casi `e L’integrazione numerica `e la tecnica pi` u diffusa. E l’unica tecnica possibile, ma nel calcolo della soluzione vicino al contorno, l`ı dove l’effetto delle singolarit` a si fa sentire maggiormente, il calcolo si presenta spesso poco accurato. Quando la geometria e il tipo di interpolazione consentono l’integrazione analitica, quest’ultima `e la strada computazionalmente pi` u conveniente. Grazie all’integrazione analitica gli errori sono ridotti a quelli di arrotondamento ed inoltre si ottiene una riduzione non trascurabile nei tempi di calcolo degli integrali. Questi vantaggi comportano per` o maggior lavoro in fase di implementazione, perch`e `e necessario ricavare l’espressione analitica delle funzioni integrali e 47 5 – Discretizzazione ad elementi di contorno bisogna gestire con attenzione i risultati nel codice. I coefficienti diagonali Gii e hii richiedono tecniche appropriate sia di integrazione analitica che di integrazione numerica (ad esempio trasformazioni di coordinate) al fine di ridurre le singolarit` a presenti in essi. 48 Capitolo 6 Caratteristiche del modello sviluppato Nel codice di calcolo implementato `e usata una discretizzazione pi` u efficiente di quella ad elementi costanti. Il tipo di interpolazione utilizzato `e chiamato HC, cio`e ad alta continuit` a, ed `e stato recentemente utilizzato in altre applicazioni computazionali [4] [5] [20]. Esso consente il raggiungimento di ottimi risultati, ma rende pi` u onerosa la gestione delle variabili e l’assemblaggio delle matrici. Il processo prevede la suddivisione del contorno in segmenti lineari (macroelementi), al fine di agevolare l’integrazione analitica. Questi macroelementi sono poi internamente suddivisi in pi` u elementi. La rappresentazione delle variabili sul macroelemento `e definita da una funzione B-spline quadratica, ed in ogni elemento `e identificata da tre parametri di controllo: generalmente i valori nei punti medi dell’elemento stesso e dei due elementi adiacenti. In fig.6.1 `e riportato un esempio di interpolazione su elementi di diversa lunghezza. Il numero di parametri necessari su un macroelemento `e dunque solo (n + 2), dove n `e il numero di elementi. L’interpolazione HC `e efficiente perch`e assicura una continuit` a di tipo C1 utilizzando pochi parametri e senza far comparire esplicitamente condizioni sulle derivate. 49 6 – Caratteristiche del modello sviluppato Figura 6.1. 6.1 Interpolazione mediante una funzione B-spline. Funzioni di interpolazione In questo paragrafo viene fornita l’espressione delle funzioni di interpolazione capaci di assicurare l’elevata continuit` a richiesta. Per semplificare la notazione si assume u = ϕ, q = ϕ¯,n , u∗ = ϕ ∗ , q ∗ = ϕ∗,n . Le variabili all’interno di un elemento sono quindi rappresentate nella forma u[ξ] = 3 X φj [ξ]uj , q[ξ] = j=1 3 X φj [ξ]qj . (6.1) j=1 dove uj e qj indicano i parametri, ξ `e un’ascissa adimensionalizzata sull’elemento, che varia fra -1 e 1, e φj [ξ] sono le funzioni di interpolazione. Nel caso generico in cui l’elemento ha lunghezza l2 e gli elementi alla sua sinistra e alla sua destra hanno rispettivamente lunghezze l1 ed l3 , si indicano con s e d i seguenti rapporti geometrici s= l1 , l2 d= 50 l3 . l2 (6.2) 6 – Caratteristiche del modello sviluppato Le tre funzioni di interpolazione hanno l’espressione generale 1 4(s+1) (1 φ1 [ξ] = φ2 [ξ] = 1 4(s+1)(d+1) − 2ξ + ξ 2 ), (2 + 3(s + d) + 4sd) + 2(d − s)ξ − (d + s + 2)ξ 2 , 1 4(d+1) (1 φ3 [ξ] = + 2ξ + ξ 2 ); (6.3a) (6.3b) (6.3c) Noti i rapporti geometrici s e d, si ottengono le tre funzioni di interpolazione. Quando l’elemento di sinistra o quello di destra sono elementi terminali, nelle espressioni andranno inseriti valori nulli per i rapporti s o d. s e d sono entrambi nulli nel caso in cui il macroelemento sia costituito da un solo elemento. In questo caso particolare i tre punti di controllo sono posizionati alle due estremit` a e nel punto di mezzo dell’elemento. In fig.6.2 `e riportato l’andamento delle tre funzioni di interpolazione nel caso frequente in cui s = 1 e d = 1. Figura 6.2. Funzioni di interpolazione nel caso s = 1 e d = 1. Con l’interpolazione quadratica HC, l’equazione (5.1) diventa in generale 3 X X X Z X X X Z 1X φk [ξi ]uj + φj [ξ]q ∗ dΓe uej = φj [ξ]u∗ dΓe qej , 2 j=1 Γe Γe m e m e j j (6.4) dove le somme fatte su m, su e e su j indicano le somme sui macroelementi, sugli elementi e sui tre parametri di interpolazione. In un macroelemento con n elementi sono necessari (n + 2) parametri per definire la di´ necessario quindi posizionare (n + 2) sorgenti, per avere un numero sufficiente stribuzione. E di equazioni. Le posizioni utilizzate sono i punti medi di ogni elemento, tranne nel caso degli elementi terminali, che presentano due sorgenti posizionate come in fig.6.3, con α = 0.3 · l e β = 0.8 · l. 51 6 – Caratteristiche del modello sviluppato Figura 6.3. Posizione delle sorgenti. Il valore della funzione di interpolazione in un punto generico `e quindi influenzato da tre parametri. Poich`e dalle condizioni al contorno non si hanno i valori dei parametri qej , ma direttamente le funzioni che devono scaturire dall’interpolazione, sono necessarie alcune operazioni di preanalisi che, a partire dalle funzioni note sul contorno, permettono di ricavare i valori da assegnare ai parametri qej . Queste operazioni sono gestite nel codice da una procedura, che risolve per ogni macroelemento un sistema lineare del tipo Ap = f (6.5) dove A `e una matrice tridiagonale, assemblata calcolando i valori delle funzioni di forma negli (n + 2) punti in cui sono prescritti i valori del flusso sul contorno, ed f `e un vettore che raccoglie i valori noti sul contorno. p `e il vettore delle incognite, che al termine della procedura raccoglie i valori dei parametri di interpolazione. 6.2 Valutazione analitica dei coefficienti integrali Utilizzando le funzioni di interpolazione fin qui definite, la valutazione della soluzione richiede il calcolo di integrali aventi la seguente forma Z a f ∗ [r]φj [ξ]dx = −a 3 Z X a f ∗ [r]cji −a i=1 x i a dx ; (6.6) dove sull’elemento di lunghezza 2a `e fissata l’ascissa x; f ∗ [r] denota la soluzione fondamentale o la sua derivata, e dipende in generale dalla distanza r tra il punto sorgente ed il punto di i campo; xa `e il termine di ordine i-esimo del polinomio di interpolazione. f ∗ [r] presenta, per r = 0, una singolarit` a, ma nel caso in esame questa `e di ordine debole. 52 6 – Caratteristiche del modello sviluppato Per ottenere una forma pi` u compatta gli integrali sono valutati in un sistema di riferimento [x,y] locale all’elemento, nel quale si ha r,y = − yr¯ , (6.7a) r,x = x−¯ x r ; (6.7b) dove x¯ e y¯ sono le coordinate del punto sorgente nel sistema locale all’elemento. In questo sistema di riferimento si ha u∗ = 1 − 2π ln(r), (6.8a) 1 q ∗ = u∗,n = u∗,r r,n = u∗,r r,y = − 2πr − yr¯ = y¯ . 2πr2 (6.8b) I coefficienti integrali da valutare sono riconducibili a due forme base Ei,j = Z a −a xj dx, (r2 )i Gi,j = Z a ln(r)(r2 )i xj dx. (6.9) −a Utilizzando le soluzioni riportate in [15] si possono rappresentare i risultati in forma ricorsiva ( ) a 1 xj−1 2 2 Ei,j = − (6.10) + 2¯ x(i − j)Ei,j−1 + (j − 1)(¯ x + y¯ )Ei,j−2 . 2i − j − 1 (r2 )i−1 −a In particolare, quando j = 2i − 1, `e necessario utilizzare la seguente espressione Ei,j = Ei−1,j−2 − (¯ x2 + y¯2 )Ei,j−2 + 2¯ xEi,j−1 . (6.11) Gli integrali necessari per inizializzare il processo ricorsivo quando y¯ 6= 0 sono 1 y¯ E1,0 = (6.12) −a a E1,1 = E0,k = Ej+1,0 = h ia x arctan x−¯ , y¯ 1 2¯ y2 j h [ln(r)]−a + x¯E1,0 , h k+1 ia x , k+1 ia x−¯ x (r 2 )j −a −a (6.13) (6.14) + (2j − 1)Ej,0 ; (6.15) per y¯ = 0 alcune di queste espressioni degenerano, e vanno sostituite con la seguente Ej,0 1 = (x − x ¯)2j−1 53 a −a 1 . (1 − 2j) (6.16) 6 – Caratteristiche del modello sviluppato Anche gli integrali del tipo Gi,j possono essere rappresentati in forma chiusa. Nel problema in esame `e richiesta soltanto la valutazione di integrali G0,k , che per y¯ 6= 0 valgono G0,k = a 1 ¯E1,k+1 ) ln(r)xk+1 −a − (E1,k+2 − x k+1 (6.17) e per y¯ = 0 diventano G0,k 1 = k+1 ¯)ln(r) − xk (x − x x k+1 a + k¯ xGj,k−1 ! , (6.18) −a dove il primo integrale necessario nel processo ricorsivo `e a G0,0 = [(x − x¯)ln(r) − x]−a . (6.19) Nel calcolo della soluzione sul contorno i coefficienti che moltiplicano i parametri uej presen1 tano un contributo − 2π G0,k , mentre i coefficienti che moltiplicano i parametri qej presentano un contributo y¯ 2π E1,k . Dopo aver ottenuto la soluzione sul contorno, per ottenere le tensioni in un punto del dominio, `e necessario posizionare la sorgente nel punto interno e derivare l’equazione integrale (4.12) lungo la direzione desiderata, nel sistema globale. u,i = − Z uq,i∗ dΓ + Γ Z qu∗,i dΓ. (6.20) Γ dove u e q non vengono derivati perch`e dipendono solo dal punto effetto e non sono influenzati da una variazione del punto sorgente. 1 Derivando la soluzione fondamentale u∗ = − 2π ln(r) lungo una direzione generica α, si ha u∗,α = − 1 r,α , 2π r ∗ mentre per valutare q,α `e necessario calcolare prima r,1α = ¯1 x1 − x r = ,α (6.21) r,n r ,α . r,1 r,α ¯1 )r,α δα1 r − (x1 − x δα1 − , = 2 r r r (6.22) dove [¯ x1 ,¯ x2 ] `e il punto sorgente nel sistema globale. Analogamente, lungo l’altra direzione globale, si ha r,2α = δα2 r,2 r,α − . r r 54 (6.23) 6 – Caratteristiche del modello sviluppato Dalle due precedenti equazioni si ha r,nα = n1 r,1α + n2 r,2α = n1 1 δα1 r,1 r,α δα2 r,2 r,α − n1 + n2 − n2 = (nα − r,α r,n ); r r r r r (6.24) Sfruttando questo risultato r ,n r = ,α 1 r (nα − r,α r,n )r − r,α r,n 1 = 2 (nα − 2r,α r,n ). 2 r r (6.25) possiamo quindi calcolare ∗ q,α = 1 r,n 1 − =− (nα − 2r,α r,n ). 2π r ,α 2πr2 (6.26) L’equazione (6.20) diviene, lungo le due direzioni principali, Z 1 1 r,1 qdΓ, (n − 2r r )udΓ − 1 ,1 ,n 2 Γ 2πr Γ 2π r Z Z 1 1 r,2 u,2 = qdΓ, (n2 − 2r,2 r,n )udΓ − 2 Γ 2πr Γ 2π r u,1 = Z (6.27a) (6.27b) dove n1 ed n2 sono le componenti del versore normale sull’elemento effetto, prese nel sistema di riferimento globale. Gli integrali andranno sempre calcolati nel riferimento locale, per cui −¯ y r , r,n = (6.28) x r,1 = r,n n1 − r,t n2 = −n1 yr¯ − n2 x−¯ r , (6.29) x r,2 = r,n n2 + r,t n1 = −n2 yr¯ + n1 x−¯ r . (6.30) e le derivate di u possono essere espresse come Z 1 1 2¯ y u,1 = n1 + 2 (−¯ y n1 − (x − x ¯)n2 ) udΓ − (−¯ yn1 − (x − x ¯)n2 )qdΓ,(6.31a) 2 2 r Γ 2πr Γ 2πr Z Z 1 1 2¯ y n2 + 2 (−¯ y n2 + (x − x¯)n1 ) udΓ − (−¯ y n2 + (x − x ¯)n1 )qdΓ ;(6.31b) u,2 = 2 2 r Γ 2πr Γ 2πr Z Definendo il fattore k= 1 2π (6.32) ed un nuovo tipo di integrale ricorrente ˜i,j = Ei,j+1 − x E ¯Ei,j 55 (6.33) 6 – Caratteristiche del modello sviluppato `e possibile calcolare la derivata u,1 attraverso la valutazione di termini del tipo ˜2,h Tf 1 = n1 kE1,h + 2k¯ y −¯ yn1 E2,h − n2 E (6.34) provenienti dal primo integrale, e del tipo ˜1,h y n1 E1,h + kn2 E Uf 1 = k¯ (6.35) provenienti dal secondo integrale. Per valutare u,2 si hanno dei coefficienti simili Tf 2 = ˜2,h , n2 kE1,h + 2k¯ y −¯ yn2 E2,h + n1 E ˜1,h . Uf 2 = k¯ yn2 E1,h − kn1 E (6.36) (6.37) Si possono quindi valutare u,1 e u,2 e possono essere calcolate le tensioni tangenziali, sostituendo i due valori nelle equazioni (3.41). Questo capitolo conclude l’inquadramento teorico alla base di questo lavoro di tesi. Nei prossimi capitoli viene esaminato il codice di calcolo in tutti i suoi dettagli implementativi, prima di passare in rassegna alcuni risultati ottenuti tramite il modello. 56 Capitolo 7 Organizzazione del programma di calcolo Questo capitolo esamina in dettaglio l’algoritmo implementato nell’ambiente Borland Delphi. Dopo un’introduzione alle grandezze globali, vengono passate in rassegna le procedure di lettura dei dati, di pre-analisi, di assemblaggio della matrice dei coefficienti, di soluzione del sistema, di post-processing e di output. Questo codice fornisce, per una data geometria della sezione, la ´ possibile inoltre calcolare la tensione distribuzione sul contorno delle tre funzioni ϕt , ϕ1 e ϕ2 . E in singoli punti di dominio, o in una griglia di punti, in modo da rappresentare globalmente i risultati mediante curve di livello, o mappe vettoriali. 7.1 Struttura del codice e variabili globali Il corpo del programma consiste in una serie di chiamate a procedure ed `e riportato in fig.7.1. Dopo una procedura di lettura dei dati forniti da input tramite file, vengono calcolate le caratteristiche geometriche della sezione. Successivamente una procedura di pre-analisi impone le condizioni al contorno e trasferisce il problema sul piano di calcolo. Si assembla quindi la matrice dei coefficienti integrali, e il sistema algebrico viene risolto per le tre diverse condizioni al contorno. La fase finale consiste in una elaborazione dei risultati ottenuti (post-processing), 57 7 – Organizzazione del programma di calcolo Figura 7.1. Corpo del programma. prima dell’output tramite file. Alcune procedure sono state implementate appositamente, mentre altre sono procedure di tipo standard, quali ad esempio le procedure di soluzione di un sistema algebrico lineare (F actor e Solve). Costanti, tipi e variabili globali sono dichiarati in un opportuno file variaglob.pas, secondo gli schemi di fig.7.2 e fig.7.3. I dati sui nodi, sui macroelementi e sui punti di dominio sono gestiti dinamicamente tramite puntatori. Il file di supporto supporti.pas `e invece utilizzato per le procedure di tipo standard. 7.2 Organizzazione delle procedure Dopo aver introdotto le variabili in gioco e aver riportato le chiamate contenute nel MAIN, vengono passate in rassegna tutte le fasi in cui `e articolato l’algoritmo. 7.2.1 Input Questa fase iniziale `e gestita dalla procedura LetturaDati, che ha il compito di leggere i dati contenuti in un file e memorizzarli tramite le variabili dichiarate. Il file contenente i dati pu` o essere creato mediante un qualsiasi editore di testi. Un semplice esempio viene presentato in fig.7.4. 58 7 – Organizzazione del programma di calcolo Figura 7.2. Definizione delle costanti e dei tipi. Dopo una prima riga, che ha la funzione di commento, devono essere fornite le nove caratteristiche elastiche indipendenti: prima i tre moduli elastici di Young, poi tre coefficienti di contrazione trasversale ν21 , ν31 e ν32 , ed infine i tre moduli di elasticit` a tangenziale. Successivamente vanno inseriti il numero totale dei lati (cio`e dei macroelementi) che compongono il contorno della sezione, il numero di punti interni in cui si vuole calcolare la soluzione e i valori delle tre caratteristiche sollecitanti che fanno insorgere tensioni tangenziali, ossia il momento torcente ed i due tagli. I dati forniti nelle successive righe identificano le coordinate dei vertici dei macroelementi. Ad ogni vertice viene assegnato un numero d’ordine, che serve successivamente, quando per ogni macroelemento va indicato il nodo iniziale e quello finale, nonch´e il numero di elementi in 59 7 – Organizzazione del programma di calcolo Figura 7.3. Dichiarazione delle variabili globali. cui si desidera suddividerlo. Il codice distingue fra contorni esterni e contorni interni di eventuali sezioni pluriconnesse. La normale al contorno `e sempre considerata uscente dal dominio. Mentre il contorno esterno viene percorso in senso antiorario, i macroelementi presenti su un eventuale contorno interno seguono una numerazione oraria (ie e je indicano il nodo iniziale e finale del macroelemento). Nell’esempio considerato si ha il caso di una sezione monoconnessa rettangolare, di dimensioni 1 x 2, sollecitata da un taglio unitario lungo l’asse x2 . Ogni lato geometrico individua un macroelemento, diviso in due elementi. 60 7 – Organizzazione del programma di calcolo Figura 7.4. Struttura di un tipico file di input. Gli ultimi dati indicano che si vuole conoscere lo stato tensionale nei punti P1 [0.999; 1] e P2 [0.5; 1]. La procedura inizia con una richiesta di immissione del nome del file. Successivamente viene memorizzata come stringa la riga descrittiva, prima di passare ai vari dati meccanici e geometrici. Per ogni nodo vengono memorizzate le due coordinate, mentre per ogni macroelemento vengono memorizzati i numeri d’ordine del nodo iniziale e di quello finale, oltre che il numero di elementi in cui l’utente vuole suddividerlo. La procedura memorizza anche le coordinate dei punti interni in cui si vuole calcolare la soluzione. 7.2.2 Pre-analisi Questa fase consiste in due procedure: una adibita al calcolo delle propriet` a geometriche della sezione e l’altra che si occupa prevalentemente di trasferire il problema nel piano di calcolo distorto e di imporre le condizioni al contorno. Procedura Geometria Il fine di questa procedura (riportata in fig.7.5) `e quello di calcolare le caratteristiche geometriche della sezione: coordinate del baricentro della sezione e momenti di inerzia del primo e del secondo ordine. La procedura `e divisa in due sezioni, in ognuna delle quali si effettuano dei cicli sui macroelementi. La prima sezione della procedura calcola l’area della sezione, i 61 7 – Organizzazione del programma di calcolo Figura 7.5. Procedura Geometria. momenti statici rispetto agli assi coordinati e le coordinate del baricentro. Una volta trovato il baricentro la seconda sezione si occupa di calcolare, tramite un altro ciclo, i momenti del secondo ordine rispetto ad un sistema di riferimento parallelo a quello iniziale, ma centrato nel baricentro. Tutti gli integrali di dominio sono trasportati sul contorno e per calcolarli, data la conformazione lineare a tratti del contorno geometrico, sono necessarie solo le posizioni degli estremi del macroelemento. 62 7 – Organizzazione del programma di calcolo Procedura PreAnalisi Inizialmente la procedura si occupa del trasferimento del problema nel piano di calcolo definito q 23 in (3.8). Per questa operazione `e necessario calcolare il rapporto di ortotropia RO = G G13 . In funzione di esso e dei dati contenuti in nodo e in punto vengono create le nuove variabili nodoP C e puntoP C, con le coordinate relative al piano di calcolo. Anche il baricentro viene poi trasferito nel piano di calcolo, mentre la variabile lato non ha ragione di essere modificata, in quanto non contiene coordinate, ma solo riferimenti ai nodi e al numero di elementi. Tramite un ciclo sui macroelementi viene poi calcolato il numero di elementi totali richiesti dall’utente. Tale numero in alcuni casi `e aumentato automaticamente dal codice, perch´e il programma tiene conto di eventuali distorsioni rilevanti nel passaggio dalla sezione iniziale al piano di calcolo. Se in input `e stata ad esempio inserita una sezione quadrata con ortotropia molto spinta, nel piano di calcolo la sezione ha la forma di un rettangolo allungato, e probabilmente `e conveniente modificare la discretizzazione iniziale desiderata dall’utente. La procedura quindi ridefinisce la mesh in base al tipo di trasposizione nel piano di calcolo. Per ogni macroelemento viene valutata l’inclinazione e, anche in funzione di RO, viene eventualmente incrementato il numero di elementi. L’aumento `e proporzionato alla reale distorsione del piano, in modo da mantenere fra gli elementi gli stessi rapporti di lunghezza dati in input: se ad esempio in una sezione quadrata si presenta il caso R = 2, allora il codice provveder` a a raddoppiare il numero di elementi con cui discretizzare i lati orizzontali. Se nella stessa sezione si presenta il caso R = 0.5, saranno i lati verticali ad essere discretizzati con un numero doppio di elementi. Poich`e la trattazione del problema di De Saint Venant `e stata fatta in un sistema baricentrico, bisogna modificare le coordinate memorizzate in nodoP C e puntoP C, centrando tutto nel baricentro. Dopo aver completato il trasferimento del problema nel piano di calcolo, devono essere imposte le condizioni al contorno e da esse si devono valutare i parametri qj , che controllano l’interpolazione della spline. Avendo ricavato l’espressioni delle funzioni di interpolazione in un caso generico, il programma si adatta facilmente sia a divisioni uniformi del macroelemento, sia ad eventuali disuniformit` a, se si vuole aumentare la densit` a nelle vicinanze di spigoli. Questo infittimento `e gestito dalla variabile inf it. Ad esempio inf it = 2 vuol dire che in una discretizzazione a 4 elementi i due elementi centrali sono lunghi il doppio rispetto a quelli di 63 7 – Organizzazione del programma di calcolo estremit` a. Nel caso di pi` u elementi, man mano che ci si avvicina al centro del macroelemento le lunghezze aumentano di un fattore pari a inf it. Su ogni macroelemento la procedura valuta il versore normale, quello tangente, nonch´e la posizione dei punti di controllo. Note le posizioni dei punti di controllo, si calcolano in questi punti i valori da imporre alle derivate, in base alle condizioni al contorno (3.40). Spetta poi alla procedura HC risolvere il sistema (6.5) e trasferire i valori imposti, sui parametri di controllo. All’uscita da P reAnalisi, gli array bvlT or, bvlT x e bvlT y di ogni macroelemento contengono i valori dei parametri di controllo imposti dalle condizioni al contorno. Procedura HC Riceve dalla procedura P reAnalisi il numero di punti di controllo presenti sul macroelemento in esame, ed un vettore x, contenente i valori imposti in quei punti. In base alle funzioni di interpolazione adottate e al tipo di infittimento desiderato, questa procedura costruisce la matrice tridiagonale del sistema (6.5), lo risolve alla Gauss-Jordan e scarica la soluzione nello stesso vettore x che ha ricevuto. Esso contiene, all’uscita dalla procedura, il valore dei parametri di controllo dedotti dalle condizioni al contorno. 7.2.3 Analisi Rappresenta il cuore del codice, in cui viene assemblata la matrice dei coefficienti del sistema e vengono risolti i tre problemi algebrici. Questa fase `e articolata in tre procedure principali: quella di assemblaggio della matrice dei coefficienti, pi` u le due procedure standard di fattorizzazione e soluzione del sistema. Procedura Assem Dopo una procedura in cui viene allocata la memoria per la gestione dinamica di K, P T or, P T x e P T y, e in cui vengono inizializzati tutti i coefficienti a zero, viene operato l’assemblaggio della matrice dei coefficienti K e dei vettori dei termini noti, tramite la procedura mostrata in fig.7.6. Assem si avvale di altre quattro procedure che sono analizzate in seguito: ElemE, ElemS, Shape e Coef f . La procedura inizia con due cicli innestati, per passare in rassegna tutti gli elementi. Di ogni elemento si valutano le propriet` a tramite ElemS e si considerano tutte le 64 7 – Organizzazione del programma di calcolo Figura 7.6. La procedura Assem. sorgenti presenti su di esso. Per ogni sorgente viene costruita una riga della matrice. Per calcolare i coefficienti integrali `e necessario impostare altri due cicli, al fine di integrare su ogni elemento. Le caratteristiche di ogni elemento-effetto vengono valutate da ElemE; si opera poi 65 7 – Organizzazione del programma di calcolo il passaggio al sistema di riferimento locale e si demanda il calcolo dei coefficienti alla procedura Coef f . Da essa si ricevono i valori necessari per assemblare la matrice K e i vettori dei termini noti P T or, P T x e P T y. Procedura Coeff Questa procedura calcola i coefficienti integrali da assemblare, mediante le operazioni mostrate Figura 7.7. La procedura Coef f . in fig.7.7. Nella variabile globale Cge sono gi` a memorizzati dati sulla sorgente e sull’elementoeffetto, mentre gli integrali analitici ricorrenti sono attinti dalla procedura Integrali Coef f (riportata in fig.7.8). Come gi` a evidenziato nel capitolo precedente bisogna calcolare termini 1 − 2π G0,k e y¯ 2π E1,k , dove Ei,j e Gi,j sono definiti ricorsivamente nelle (6.9)-(6.19). Va inoltre considerato il termine libero, in cui compare il valore della ϕ nel punto sorgente. Tutti i conk tributi sono poi normalizzati tramite a1 e vengono moltiplicati per un opportuno coefficiente 66 7 – Organizzazione del programma di calcolo Figura 7.8. Procedura Integrali Coef f . di forma, prima di poter essere assemblati. Tale coefficiente `e fornito dalla funzione Shape. Funzione Shape La funzione, mostrata in fig.7.9, calcola i coefficienti di forma usati in Coef f , in base ai coefficienti delle funzioni definite in (6.3). Per fare ci` o sono necessari i valori dei parametri geometrici s e d, che la funzione ricava in base alla posizione dell’elemento sul lato e al tipo di mesh adottata. n `e il numero totale di elementi presenti sul lato, m `e il numero dell’elemento, i e j sono due indici necessari per identificare le tre funzioni di interpolazione e i tre gradi del polinomio. Procedura ElemS Il corpo della procedura `e illustrato in fig.7.10. Essa riceve come input il numero di riferimento del macroelemento e dell’elemento. Di questo calcola le coordinate del punto medio, la lunghezza, i coseni direttori della normale esterna, il numero di sorgenti presenti e le loro coordinate. 67 7 – Organizzazione del programma di calcolo Figura 7.9. Funzione Shape. Tutti questi dati vengono memorizzati nella variabile globale Cge. Procedura ElemE Riceve in input il numero identificativo del macroelemento e dell’elemento di cui deve calcolare le propriet` a. Dell’elemento in questione calcola le coordinate del punto medio, la lunghezza ed i coseni direttori della normale esterna. Tutti i dati vengono memorizzati nella variabile Cge. Procedure Factor e Solve I tre problemi differenziali conducono quindi a tre problemi algebrici che hanno in comune la matrice dei coefficienti K, mentre i termini noti differiscono in base alle condizioni al contorno. La soluzione del sistema, caratterizzato da una matrice dei coefficienti non simmetrica, `e ottenuta attraverso il processo standard di fattorizzazione di Cholesky, seguito da tre chiamate alla procedura Solve per i tre distinti termini noti. Al termine di queste procedure i vettori P T or, P T x e P T y contengono i valori dei parametri di interpolazione per la funzione incognita ϕ. 68 7 – Organizzazione del programma di calcolo Figura 7.10. Procedura elemS. 69 7 – Organizzazione del programma di calcolo 7.2.4 Post-processing Elaborando le soluzioni provenienti dal sistema, possono essere calcolate importanti caratteristiche. La rigidezza torsionale viene calcolata dalla procedura T orStif f , mentre il centro di taglio `e calcolato trasportando sul contorno gli integrali presenti in (3.70). I coefficienti S1 e S2 hanno quindi l’espressione I 0 1 m2 4 1 3 S1 = 2 η nη + ηϕ1 − ηξ nξ dΓ , −ξϕ1 + R Γ0 4 3 I 0 1 1 3 m1 4 ξϕ2 − ξη nη + −ηϕ2 + ξ nξ dΓ . S2 = 2 R Γ0 3 4 (7.1a) (7.1b) Tramite i valori di ϕ1 e ϕ2 interpolati sul contorno si possono calcolare S1 e S2 , e quindi anche le coordinate del centro di taglio dalle (3.69). 7.2.5 Output Di questa fase si occupa l’omonima procedura, che ha il compito di preparare il file output.out, servendosi di altre procedure. All’inizio vengono riportati sul file alcuni dati generici di input: dati sulla geometria, sul numero di elementi utilizzati e sulle caratteristiche elastiche del solido. Vengono anche riportate le coordinate del centro di taglio e la rigidezza torsionale. Successivamente, scorrendo tutti gli elementi, vengono stampati sul file le distribuzioni sul contorno delle tre funzioni scalari e delle loro derivate normali. I valori sono calcolati in cinque punti, equispaziati su ogni elemento, in base ai valori dei parametri di controllo. Esaurita la fase di analisi sul contorno, si passa al calcolo della soluzione nei punti di dominio in cui `e richiesta. Per calcolare le tensioni in un punto interno non sono necessari i valori di ϕt , ϕ1 e ϕ2 , ma solo le derivate delle stesse lungo ξ ed η. E’ necessario comunque posizionare la sorgente nel punto di dominio e ricalcolare nuovi coefficienti integrali su tutto il contorno. Di questo calcolo si occupa la procedura StressCoef f , che restituisce i coefficienti utili. Le derivate delle funzioni si calcolano tramite le (6.31), e i risultati vanno poi sostituiti in (3.65) per ottenere le tensioni tangenziali nel punto. Generalmente l’utente `e interessato a conoscere la tensione in punti critici, ma in alcuni casi pu` o essere utile diagrammare una grandezza su tutta la sezione, sia essa una tensione o una delle tre funzioni scalari. Inserendo un’opportuna 70 7 – Organizzazione del programma di calcolo procedura per creare una griglia di punti nel dominio, l’output si presta facilmente alla creazione di grafici e mappe vettoriali tramite il programma Surf er. Dopo aver ricavato le incognite anche nei punti di dominio, il file di output viene chiuso e il codice termina, rilasciando la memoria tramite un’apposita procedura. Procedura StressCoeff Segue gli stessi passaggi logici di Coef f , ma utilizza integrali analitici diversi, attingendoli da Integrali StressCoef f . I nuovi integrali sono quelli necessari per calcolare i termini riportati k in (6.34)-(6.37). Tali contributi sono poi normalizzati tramite a1 e vengono moltiplicati per un opportuno coefficiente di forma, prima di essere utilizzati. Questo coefficiente `e fornito sempre dalla funzione Shape. Procedura TorStiff Per il calcolo della rigidezza torsionale `e necessario valutare il momento di inerzia polare rispetto al baricentro, nel piano di calcolo. Va eseguita anche un’integrazione per valutare l’integrale di Dirichelet, gi` a trasportato sul contorno in (3.56). Una volta calcolato il termine di inerzia torsionale basta moltiplicarlo per il rapporto G31 R e si ottiene la rigidezza torsionale. La proce- dura si avvale sia di ElemE che della procedura ShapeT S, adibita a ricavare i coefficienti di forma e riportata in fig.7.12. 71 7 – Organizzazione del programma di calcolo Figura 7.11. Procedura StessCoef f . 72 7 – Organizzazione del programma di calcolo Figura 7.12. Procedura ShapeT S. 73 Capitolo 8 Sperimentazione numerica del modello In questo capitolo vengono riportati i risultati di alcuni test, al fine di valutare l’accuratezza delle soluzioni ottenute tramite il modello sviluppato. Si prendono in considerazione sia geometrie semplici, per le quali sono note soluzioni analitiche o in serie, sia geometrie articolate su cui siano disponibili dei risultati di confronto ottenuti per via numerica, ad esempio agli elementi finiti. Tranne il caso in cui venga espressamente indicato il contrario, si sottintende che ogni macroelemento sia suddiviso in elementi di lunghezza uniforme. Ogni elemento contiene una sorgente, posizionata sul suo punto medio, tranne gli elementi di estremit` a che contengono due sorgenti, posizionate a distanza α = 0.3 × l e β = 0.8 × l dall’estremit` a (l `e la lunghezza dell’elemento stesso). I risultati sono ottenuti tramite il codice, sviluppato in ambiente Delphi, esaminato nei precedenti capitoli. In questo codice tutte le variabili reali di rilievo sono memorizzate in doppia precisione. Per quanto riguarda il calcolo delle tensioni, nelle successive applicazioni saranno forniti anche dei valori sul contorno. In realt` a la soluzione sul contorno `e fornita solo in termini delle tre funzioni scalari e non `e dato il valore delle tensioni sul contorno. Tuttavia `e possibile far tendere un punto di dominio al contorno, ottenendo un valore praticamente coincidente con 74 8 – Sperimentazione numerica del modello quello effettivo sul contorno. Ci` o `e reso possibile dall’integrazione analitica, che rende esatto il calcolo degli integrali e consente di calcolare le tensioni avvicinandosi anche di molto al contorno. Attraverso alcune prove si `e notato che il comportamento `e stabile fino ad una frazione della lunghezza dell’elemento dell’ordine di 10−9 . I risultati numerici sono suddivisi in quattro paragrafi: i primi due analizzano il caso di solidi isotropi soggetti a torsione e taglio, mentre negli ultimi due viene affrontato il caso di legame ortotropo. A chiusura del lavoro seguono poi alcune note conclusive. 8.1 Torsione con legame isotropo Si analizzano adesso alcuni casi di torsione pura, in cui cio`e l’unica caratteristica della sollecitazione non nulla `e un momento torcente Mt . Nelle seguenti applicazioni il mezzo `e isotropo, con moduli elastici E e G, e coefficiente di contrazione trasversale ν. Vengono calcolate alcune caratteristiche, come la rigidezza torsionale, la distribuzione della funzione di ingobbamento e le tensioni sulla sezione. I risultati sono poi confrontati con quelli disponibili in letteratura. Figura 8.1. 8.1.1 Sezione triangolare - Geometria. Sezione triangolare equilatera Si prenda in considerazione il triangolo equilatero di lato l in fig.8.1. Come riportato da Timoshenko [25], si possono calcolare i valori esatti dell’inerzia torsionale e della τmax sulla sezione, 75 8 – Sperimentazione numerica del modello attinta nei punti Ai . Jt √ 3 4 80 l ; = (8.1) t = 20 M l3 . τmax Nella tabella 8.1 sono riportati i risultati numerici ottenuti per la tensione nei punti Ai e per la rigidezza torsionale, al variare del numero di elementi n utilizzati su ogni lato. Tabella 8.1. n τmax ·l3 Mt err % 1 2 4 8 16 32 25.325 21.887 20.462 20.104 20.026 20.007 26.62 9.43 2.31 0.52 0.13 0.03 Esatta 20.000 Jt l4 × 102 1.5758 2.0230 2.1641 2.1651 2.1651 2.1651 err % 27.22 6.56 0.04 0.00 0.00 0.00 2.1651 Sezione triangolare - Tensione massima e inerzia torsionale. Al fine di visualizzare la distribuzione delle tensioni su tutta la sezione `e stata impostata una griglia di punti interni. Dopo aver calcolato le tensioni in questi punti `e stata creata una mappa vettoriale tramite il programma di visualizzazione Surfer. Dalla figura 8.2 si nota come le tensioni siano massime nei punti medi dei lati, e nulle nella zona centrale della sezione e nei pressi dei tre vertici. In fig.8.3 `e operato un confronto fra l’andamento analitico delle τ lungo l’asse ξ, riportato in [25], e la soluzione ottenuta mediante il modello numerico. 8.1.2 Sezione rettangolare Viene considerata ora la sezione rettangolare di lati 2a e 2b riportata in fig.8.4. In base ai risultati forniti in [25] si hanno a disposizione i valori della τmax e dell’inerzia torsionale Jt , ottenuti tramite serie numeriche. La tensione massima si raggiunge nel punto di mezzo del lato pi` u lungo. Jt τmax = k1 (2a)3 (2b), = Mt k2 (2a)2 (2b) , 76 (8.2) 8 – Sperimentazione numerica del modello Figura 8.2. Sezione triangolare - Mappa vettoriale delle tensioni da torsione. Figura 8.3. Sezione triangolare - Andamento delle τ lungo l’asse mediano ξ. 77 8 – Sperimentazione numerica del modello Figura 8.4. Figura 8.5. Sezione rettangolare - Geometria. Sezione rettangolare - Tensioni da torsione. dove k1 e k2 sono coefficienti che dipendono dal rapporto b a b a e sono tabellati in [25]. Considerando = 2, Timoshenko riporta k1 = 0.229 e k2 = 0.246, mentre Friedman e al. [14] riportano come valore di confronto un valore di k1 con pi` u cifre significative, ottenuto sempre tramite serie, pari a 0.22868. Nella tabella 8.2 sono riportati i risultati numerici ottenuti per i due coefficienti, nel caso in cui b = 2a. Per uniformare le lunghezze degli elementi, il lato corto e quello lungo sono stati discretizzati rispettivamente con n e 2n elementi. La distribuzione delle tensioni tangenziali `e rappresentata nella mappa vettoriale in fig.8.5, in cui si nota come la zona esterna sia molto pi` u sollecitata rispetto al nucleo della sezione. Per questo tipo di sezione, in [2] `e riportata anche la distribuzione della funzione di ingobbamento, ottenuta tramite uno sviluppo in serie di Fourier. In fig.8.6 `e rappresentata la distribuzione della funzione lungo l’asse x, operando un confronto 78 8 – Sperimentazione numerica del modello Tabella 8.2. Figura 8.6. n k1 err % k2 err % 1 2 4 8 0.21503 0.22716 0.22853 0.22866 5.97 0.67 0.07 0.01 0.22903 0.24196 0.24524 0.24574 6.90 1.64 0.31 0.10 Serie [14] Serie [25] 0.22868 0.246 Sezione rettangolare - Coefficienti k1 e k2 nel caso b a = 2. Sez. rettangolare - Distribuzione della funzione di ingobbamento lungo l’asse x. fra la soluzione in serie e quelle ottenute tramite il modello numerico, nel caso in cui 2a = 1 e 2b = 2. In fig.8.7 `e invece riportata la distribuzione della funzione di ingobbamento su tutta la sezione. Un altro caso di sezione rettangolare interessante da esaminare `e quello in cui a b = 10. Le tensioni, sezionando lungo una corda, hanno due massimi simmetrici sulle pareti laterali. In fig.8.8 `e riportata la mappa vettoriale delle tensioni da torsione. Su questo tipo di sezione `e stato calcolato il coefficiente k1 e in tabella 8.3 sono riportati i risultati, all’aumentare del 79 8 – Sperimentazione numerica del modello Figura 8.7. Sezione rettangolare - Distribuzione della funzione di ingobbamento sulla sezione. Figura 8.8. Sezione sottile - Tensioni da torsione. numero di elementi. Il confronto `e fatto con la soluzione in serie riportata in [14]. I lati lunghi e quelli corti sono discretizzati rispettivamente con N ed n elementi. Data la particolare geometria della sezione, i risultati migliorano sensibilmente utilizzando elementi di lunghezza uniforme sui due lati, e quindi utilizzando N = 10 × n. 8.1.3 Sezione ottagonale regolare La geometria di questa sezione `e illustrata in fig.8.9. Anche in questo caso `e possibile ricavare una soluzione tramite serie numeriche. Come riportato in [25], si ha Jt = 0.13Ad2 , τmax = Mt ; 0.223Ad (8.3) dove A `e l’area della sezione ottagonale e d `e il diametro del cerchio inscritto. La τmax viene raggiunta nel punto medio di ogni lato. Discretizzando il contorno con n elementi per lato si 80 8 – Sperimentazione numerica del modello N n N el k1 err % 1 2 4 6 10 20 1 1 1 1 1 2 4 6 10 14 22 44 0.18106 0.19813 0.27725 0.26439 0.30291 0.31198 42.03 36.56 11.23 15.35 3.02 0.11 Serie [14] 0.31233 Tabella 8.3. Figura 8.9. Sezione sottile - Coefficiente k1 . Geometria della sezione ottagonale regolare. ottengono i risultati riportati in tabella 8.4. n Tabella 8.4. 8.1.4 τmax · Ad Mt 1 2 4 8 16 4.419 4.538 4.529 4.504 4.499 serie [25] 4.484 err % Jt Ad2 err % 1.5 1.2 1.0 0.5 0.3 0.1290 0.1295 0.1299 0.1299 0.1299 0.8 0.3 0.1 0.1 0.1 0.13 Sezione ottagonale - Tensione massima e inerzia torsionale. Sezione tubolare Avendo a che fare con una sezione tubolare biconnessa, bisogna avere l’accortezza di orientare il contorno interno in senso orario, affinch´e la normale continui ad essere uscente dalla sezione. Per sezioni sottili chiuse soggette a torsione, le tensioni tangenziali hanno verso concorde lungo 81 8 – Sperimentazione numerica del modello Figura 8.10. Figura 8.11. Geometria della sezione tubolare. Sezione tubolare - Distribuzione delle tensioni lungo una corda. la corda. La teoria approssimata di Bredt suppone che l’andamento delle τ lungo la corda sia costante e fornisce τ= 4Ω 2 Jt = H dΓ ; Mt , 2Ωs Γ (8.4) s dove Ω `e l’area racchiusa dalla linea media della sezione e s `e lo spessore della corda. Con la geometria in fig.8.10 si ha Ω = 42.75 e s = 0.5, costante per ogni corda. L’inerzia torsionale Jt ha un valore di circa 130.54 e la teoria approssimata di Bredt prevede una tensione 82 8 – Sperimentazione numerica del modello media sulla corda (τb /Mt ) = 2.3392×10−2. In fig.8.11 `e diagrammato l’andamento delle tensioni lungo la corda A-A, ottenuto discretizzando i lati verticali e quelli orizzontali, rispettivamente con n e 2n elementi. 8.1.5 Sezione scatolare Figura 8.12. Geometria della sezione scatolare. La sezione in fig.8.12 rappresenta un caso di maggior interesse tecnico ed `e analizzata da Sapountzakis [23] e da Ciambrone e al. [11]. Al variare del numero di elementi impiegati, in tabella 8.5 sono riportati i valori dell’inerzia torsionale ottenuti mediante il modello numerico. In fig.8.13 sono diagrammate le tensioni tangenziali da torsione. Tabella 8.5. N el Jt 28 85 132 264 40.981 42.394 42.435 42.459 [11] [23] 42.475 42.509 Sezione scatolare - Inerzia torsionale. 83 8 – Sperimentazione numerica del modello Figura 8.13. 8.2 Sezione scatolare - Diagramma vettoriale delle tensioni da torsione. Taglio con legame isotropo La soluzione di un problema di taglio `e difficilmente ottenibile in forma analitica. Sono presenti in letteratura delle soluzioni in serie numeriche, con cui `e possibile confrontare i risultati del codice di calcolo. Nelle seguenti applicazioni vengono valutate, oltre alle tensioni da taglio, anche le coordinate del centro di taglio. 8.2.1 Sezione rettangolare Sollecitando la sezione in fig.8.14 mediante due tagli orientati secondo le due direzioni di riferimento, sorgono le tensioni rappresentate in fig.8.15. Figura 8.14. Sezione rettangolare. Volendo verificare il grado di accuratezza dei risultati del modello `e possibile operare un 84 8 – Sperimentazione numerica del modello Figura 8.15. Sezione rettangolare - Tensioni tangenziali dovute ai tagli Tx e Ty . confronto con il lavoro di Friedman e al. [14], in cui si assoggetta una sezione con a = 0.5 e b = 1, a taglio unitario lungo la direzione y e vengono calcolate le tensioni tangenziali τy nei punti P1 (0.8,0.25) e P2 (0.6,0.75). Il legame `e isotropo, con costanti E = 2 × 106 e ν = 0.3. I lati verticali e orizzontali sono discretizzati rispettivamente con n e 2n elementi. I risultati ottenuti in [14] vengono riportati a parit` a di elementi totali utilizzati. n τy1 1 2 4 8 0.64672 0.65328 0.65223 0.65210 Esatta 0.65210 Tabella 8.6. err % 0.82 0.18 0.02 0.00 τy1 [14] - err % - 0.65460 0.65214 0.65211 0.38 0,01 0,00 0.65210 τy2 0.55309 0.55063 0.54948 0.54943 0.54943 err % 0.67 0.22 0.01 0.00 τy2 [14] - err % - 0.54801 0.54944 0.54944 0.26 0.00 0.00 0.54943 Sezione rettangolare 2x1 - Tensioni provocate da taglio Ty unitario. 85 8 – Sperimentazione numerica del modello Figura 8.16. Figura 8.17. 8.2.2 Sezione triangolare - Geometria e sistema di riferimento. Distribuzione delle tensioni con taglio agente lungo l’asse y. Sezione triangolare equilatera Per il solido cilindrico a sezione triangolare si utilizza adesso il sistema di riferimento indicato in fig.8.16. In fig.8.17-8.18 sono rappresentate in forma vettoriale le tensioni che insorgono per due sollecitazioni taglianti orientate secondo gli assi. Nell’esempio numerico la sezione `e sollecitata da un taglio T lungo y. Per questo tipo di problema Timoshenko [25] riporta la distribuzione delle tensioni lungo l’asse mediano x. 86 8 – Sperimentazione numerica del modello Figura 8.18. Distribuzione delle tensioni con taglio agente lungo l’asse x. In fig.8.19 viene confrontata la distribuzione esatta con i risultati numerici provenienti da tre discretizzazioni rade. Figura 8.19. Sezione triangolare - Distribuzione delle tensioni tangenziali τy lungo l’asse x. Il centro di taglio, date le caratteristiche di simmetria della sezione, coincide con il baricentro e ha quindi coordinate (0,0). Anche se la posizione del centro di taglio `e nota analiticamente, 87 8 – Sperimentazione numerica del modello Tabella 8.7. n Xc a Xc a 1 2 3 6 9 0.098 0.024 0.001 0.000 0.000 [14] - 0.013 0.001 0.000 Sezione triangolare - Ascissa del centro di taglio. se ne controlla la valutazione numerica che fornisce il modello. I risultati vengono riportati assieme a quelli di [14] nella tabella 8.7. Ogni lato `e discretizzato con n elementi. 8.2.3 Sezione in parete sottile a C Figura 8.20. Sezione a C in parete sottile - Geometria. Per quanto riguarda la sezione a pareti sottili riportata in fig.8.20, considerando il sistema di riferimento indicato, l’asse x `e asse di simmetria. Il centro di taglio giace quindi su questo asse. L’ascissa xc pu` o essere calcolata e confrontata sia con quella ottenuta tramite la teoria approssimata del taglio di Jourawsky, sia con i risultati di Ciambrone e al. [11]. 88 8 – Sperimentazione numerica del modello Tabella 8.8. 8.2.4 N el Xc 8 14 26 42 2.9460 2.9279 2.9953 3.0419 Jourawsky [11] 3.1078 3.0385 Sezione a C - Ascissa del centro di taglio. Sezione scatolare La sezione scatolare riportata in fig.8.12 `e analizzata adesso in caso di sollecitazione tagliante. Al variare del numero di elementi impiegati, in tabella 8.9 vengono riportati i valori ottenuti per l’ordinata del centro di taglio. In fig.8.21 `e invece riportata la mappa vettoriale delle tensioni. Tabella 8.9. Figura 8.21. N el Yc 28 85 132 264 1.971 1.560 1.559 1.558 [11] [23] 1.569 1.567 Sezione scatolare - Ordinata del centro di taglio. Sezione scatolare - Diagramma vettoriale delle tensioni da taglio. 89 8 – Sperimentazione numerica del modello 8.3 Torsione con legame ortotropo Dopo aver verificato i risultati forniti dal codice nel caso di legame isotropo, si esamina ora il caso di torsione in presenza di legame ortotropo. In letteratura non sono disponibili molti risultati di confronto per questo tipo di problema. Fa eccezione il trattato di Lekhnitskii sull’elasticit` a dei corpi anisotropi [19], dove sono affrontati i casi di sollecitazione di torsione e taglio per sezioni a semplice geometria. Per poter confrontare i risultati ottenuti su sezioni complesse `e stato utilizzato LUSAS, un codice di calcolo ad elementi finiti. Sono stati modellati dei solidi prismatici, incastrati su una base e sollecitati sull’altra. Il confronto `e stato fatto valutando le tensioni in una sezione centrale, sufficientemente lontana dalle basi per soddisfare le ipotesi di De Saint Venant. Per quanto riguarda l’elemento usato nell’analisi dal codice LUSAS si `e utilizzato l’elemento esaedrico identificato dalla sigla HX20. Tale elemento `e basato sull’approccio standard isoparametrico, ha 20 nodi e un grado quadratico di interpolazione sugli spostamenti. L’integrazione numerica `e realizzata all’interno dell’elemento con 2x2x2 punti di Gauss. Come `e stato evidenziato nel cap.3, delle nove costanti elastiche indipendenti per legame ortotropo solo due sono determinanti nel problema della torsione: G13 e G23 . Il valore delle tensioni `e inoltre influenzato solo dal rapporto dei due moduli tangenziali. Poich`e i risultati del codice riportati in questo capitolo provengono da un’analisi nel piano di calcolo, si ricorda che, per tenere conto dell’eventuale distorsione, il codice incrementa il numero di elementi in modo opportuno, in funzione del rapporto di ortotropia e della direzione di ogni lato. Quando nelle tabelle successive si fa riferimento al numero totale di elementi N el utilizzati nell’analisi, si indica il numero di elementi effettivi utilizzati nel piano di calcolo, e non quelli inseriti dall’utente nel file di input. 90 8 – Sperimentazione numerica del modello Figura 8.22. 8.3.1 Sezione rettangolare. Sezione rettangolare Nell’affrontare la sezione rettangolare riportata in fig.8.22 conviene utilizzare la seguente notazione R = c = d r G23 , G13 a , b = Rc; (8.5a) (8.5b) (8.5c) Lekhnitskii [19] propone le seguenti espressioni per la rigidezza torsionale e le tensioni tangenziali nei punti A e B. GJt = G13 ab3 β, τA = τB = RMt k2 , ab2 Mt k1 ; ab2 (8.6) (8.7) (8.8) dove β, k1 e k2 sono dei coefficienti ottenuti tramite serie numeriche. Questi coefficienti sono funzioni esclusive del parametro d, dipendente sia dalle caratteristiche geometriche che da quelle meccaniche. Nelle tabelle di seguito si riportano i valori dei coefficienti β, k1 e k2 , in funzione del numero totale di elementi di contorno utilizzati. Sono riportate tre situazioni diverse (d = 1,2,4). I risultati sono confrontati con quelli di Lekhnitskii e con quelli ottenuti da un’analisi tridimensionale LUSAS a 1200 elementi (forma esaedrica con interpolazione quadratica) e 18039 gradi di libert` a. 91 8 – Sperimentazione numerica del modello Tabella 8.10. Tabella 8.11. N el β k1 k2 8 16 32 0.137 0.140 0.141 4.979 4.882 4.820 4.979 4.882 4.820 LUSAS [19] 0.141 4.773 4.803 4.848 4.803 Sezione rettangolare ortotropa - R = 0.5; c = 2; d = 1. N el β k1 k2 12 24 48 0.227 0.228 0.229 4.133 4.078 4.069 3.307 3.286 3.245 LUSAS [19] 0.229 4.060 4.065 3.297 3.232 Sezione rettangolare ortotropa - R = 0.5; c = 4; d = 2. In un problema isotropo con questa geometria la massima tensione tangenziale si raggiunge nel punto medio del lato lungo. Nel caso ortotropo la tensione massima pu` o invece presentarsi nel punto medio del lato corto, come accade nel caso esaminato nella tabella 8.12, in cui la sezione di lati a/b = 2 presenta un modulo G23 quattro volte pi` u grande rispetto a G13 . Tale risultato `e confermato anche dal modello 3D agli elementi finiti. In fig.8.23 le zone rosse evidenziano i massimi tensionali, raggiunti lungo il lato corto. Tabella 8.12. N el β k1 k2 10 20 40 0.270 0.280 0.281 3.702 3.561 3.552 2.556 2.694 2.686 LUSAS [19] 0.281 3.552 3.550 2.529 2.644 Sezione rettangolare ortotropa - R = 2; c = 2; d = 4. 92 8 – Sperimentazione numerica del modello Figura 8.23. Modello solido agli elementi finiti - Diagramma tensionale. Figura 8.24. 8.3.2 Sezione triangolare - Geometria. Sezione triangolare equilatera Sollecitando la sezione di fig.8.24 con un momento torcente, si `e visto in 8.1.1 che nel caso isotropo la tensione massima viene raggiunta nel punto medio di ogni lato. Viene esaminato ora il caso in cui R = 0.5, in cui cio`e il modulo G13 `e quattro volte pi` u grande di G23 . In fig.8.25-8.26 viene diagrammato il modulo delle tensioni tangenziali. Si nota che nel caso ortotropo le tensioni maggiori vengono attinte lungo il lato BC. Questo accade perch`e `e stata aumentata la rigidezza nel piano xz, attraverso un maggior valore di G13 . Nella tabella 8.13 vengono riportati i valori della rigidezza torsionale e delle tensioni calcolate nei punti A1 e A2 in funzione del numero totale di elementi utilizzati. Come verifica si `e operata una fitta discretizzazione ad elementi finiti di un modello tridimensionale costruito tramite LUSAS (1900 elementi a esaedro e 16900 gradi di libert` a). Dalla fig.8.26 si nota che lungo i lati AB e AC le tensioni massime non vengono raggiunte 93 8 – Sperimentazione numerica del modello Figura 8.25. Figura 8.26. Tabella 8.13. Sezione triangolare - Tensioni nel caso isotropo (R=1). Sezione triangolare - Tensioni in un caso ortotropo (R=0.5). N el (τ1 l3 )/Mt (τ2 l3 )/Mt GJt 5 10 18 38 30.631 30.447 30.116 29.662 18.206 16.024 15.504 15.527 65.334 74.077 74.708 74.759 LUSAS 29.670 15.630 - Sezione triangolare ortotropa (R = 0.5) - Tensioni nei punti medi e rigidezza torsionale (G13 = 8 × 105 ; G23 = 2 × 105 ). 94 8 – Sperimentazione numerica del modello sul punto medio, ma in un punto pi` u vicino al lato BC. Per evidenziare questo comportamento sono state calcolate le tensioni lungo i lati in tre casi diversi: un caso isotropo e due ortotropi (R=0.7071 e R=0.5). I diagrammi sono riportati in fig.8.27 Figura 8.27. Figura 8.28. Sezione triangolare - Tensioni tangenziali lungo i lati. Sezione triangolare - Mappa tensionale nel caso ortotropo. In fig.8.28 `e riportato il diagramma delle tensioni ottenuto tramite il modello solido analizzato con LUSAS. I diagrammi seguenti, ove non sia specificato diversamente, riportano il valore del modulo delle tensioni. Il comportamento previsto dal modello agli elementi di contorno, nel caso in cui R = 0.5, viene confermato dal modello LUSAS. 95 8 – Sperimentazione numerica del modello 8.3.3 Sezione a croce Si analizza adesso una sezione a croce, con contorno formato da dodici segmenti unitari, soggetta a momento torcente unitario. Figura 8.29. Figura 8.30. Sezione a croce - Confronto fra le mappe tensionali nel caso isotropo. Sezione a croce - Confronto fra le mappe tensionali nel caso ortotropo. In fig.8.29-8.30 sono riportati i confronti fra le mappe tensionali ricavate tramite il modello 3D LUSAS e quelle per curve di livello ottenute tramite il modello agli elementi di contorno. 96 8 – Sperimentazione numerica del modello Per il modello agli elementi finiti sono stati utilizzati 625 elementi a esaedro con interpolazione quadratica, per un totale di 10188 gradi di libert` a. Il modello agli elementi di contorno utilizzato per ricavare le mappe presenta invece 144 gradi di libert` a. I due confronti riguardano il caso isotropo ed un caso ortotropo con G13 = 8×105 e G23 = 2×105 (R = 0.5). Nel caso isotropo, in tabella 8.14 sono riportati i valori numerici della tensione calcolata nel punto A, discretizzando con n elementi ogni lato. Tabella 8.14. n τA 1 2 4 8 16 0.4055 0.4308 0.4261 0.4191 0.4173 LUSAS 0.4158 Sezione isotropa a croce - Tensioni nel punto A. Nel caso ortotropo la fascia orizzontale assorbe una quota maggiore del momento sollecitante e subisce uno stato tensionale pi` u elevato rispetto al resto della sezione. In entrambi i casi il modello agli elementi di contorno fornisce buoni risultati. 8.3.4 Sezione a parete sottile Analizzando una sezione sottile come quella riportata in fig.8.31, l’andamento delle tensioni tangenziali lungo una corda pu` o essere approssimato con un andamento lineare. Nel caso isotropo, le tensioni lungo le corde A e B sono nulle al centro della corda e massime sul contorno, con valori massimi coincidenti. Nel caso ortotropo la sezione `e maggiormente rigida nel piano xz, per cui le pareti orizzontali assorbono una quota maggiore di momento torcente, e in esse vanno ricercate le tensioni massime. In fig.8.32-8.33 sono riportate le mappe tensionali ottenute tramite LUSAS con una discretizzazione di 3020 elementi a esaedro, con interpolazione quadratica, e 51549 gradi di libert` a. Vengono diagrammati i moduli delle tensioni tangenziali. In entrambi i casi lungo la linea media le tensioni sono nulle. Sul contorno i due casi esaminati portano a soluzioni diverse: mentre nel caso isotropo i valori delle tensioni massime lungo le pareti orizzontali e lungo quella verticale 97 8 – Sperimentazione numerica del modello Figura 8.31. Figura 8.32. Sezione sottile - Geometria. Sezione sottile - Mappa tensionale nel caso isotropo (R=1). sono uguali, nel caso ortotropo si raggiungono tensioni maggiori lungo le pareti orizzontali, essendo G13 = 4 · G23 = 8 × 105 . Indicando con τA e τB le tensioni massime attinte lungo le corde A e B evidenziate in fig.8.31, si riportano nelle tabelle 8.15-8.16 i valori delle tensioni e della rigidezza torsionale, in 98 8 – Sperimentazione numerica del modello Figura 8.33. Sezione sottile - Mappa tensionale nel caso ortotropo (R=0.5). n N el (τA × 10)/Mt (τB × 10)/Mt GJt × 10−6 1 2 4 76 152 304 0.83174 0.81653 0.81561 0.83169 0.81653 0.81561 9.6171 9.7976 9.8086 0.81081 0.81081 9.8667 Manuale Tabella 8.15. Sezione isotropa a parete sottile (R = 1) - Rigidezza torsionale e tensioni massime lungo le corde A e B. funzione del numero di elementi utilizzati sul contorno. Con n `e indicato il numero di elementi utilizzati per discretizzare il lato pi` u piccolo, mentre i restanti lati sono discretizzati in modo proporzionale alla diversa lunghezza. N el `e il numero totale di elementi utilizzati nel piano di n N el (τA × 10)/Mt (τB × 10)/Mt GJt × 10−6 1 2 4 110 220 440 1.2802 1.2766 1.2759 0.3202 0.3193 0.3191 6.2469 6.2641 6.2679 1.2000 0.3000 6.6667 Manuale Tabella 8.16. Sezione ortotropa a parete sottile (R = 0.5) - Rigidezza torsionale e tensioni massime lungo le corde A e B. 99 8 – Sperimentazione numerica del modello calcolo. Viene riportata la soluzione manuale, in cui la sezione `e scomposta in tre rettangoli sottili, che assorbono diverse frazioni del momento in funzione della loro inerzia torsionale nel piano di calcolo. Per rettangoli sottili l’inerzia torsionale `e pari a 1 3 3 ls , dove l `e la lunghezza e s lo spessore. La τ massima sul rettangolo sottile, ipotizzando andamento parabolico per la funzione delle tensioni, `e poi calcolabile come τi = Mi Jti si , dove Mi indica la porzione di momento assorbito dal rettangolo, Jti l’inerzia torsionale nel piano reale e si lo spessore del rettangolo sottile i-esimo. 8.3.5 Sezione tubolare Nel caso isotropo si `e visto che le tensioni lungo la corda sono ben approssimabili con un andamento lineare. Con la geometria in fig.8.34 il prodotto 100 · τ Mt varia da un valore minimo di circa 1.95 ad un valore massimo di circa 2.69 (cfr. fig.8.11). Figura 8.34. Sezione tubolare - Geometria. Variando il rapporto tra i moduli tangenziali si osserva il seguente comportamento: nel piano meno rigido si presenta una maggiore uniformit` a delle tensioni tangenziali, mentre lungo le pareti orizzontali si ha una marcata variabilit` a. Prendendo su di esse una corda, le tensioni hanno variazioni all’incirca lineari, con valori bassi sul contorno interno e alti sul contorno esterno. Tale comportamento `e confermato dal modello agli elementi finiti costruito tramite LUSAS, con 560 elementi a esaedro e 12360 gradi di libert` a. In fig.8.35-8.36 sono confrontati i diagrammi del modulo delle tensioni nel caso isotropo e in un caso ortotropo. Nella tabella 8.17 sono riportati i valori, calcolati mediante il modello agli elementi di 100 8 – Sperimentazione numerica del modello Figura 8.35. Figura 8.36. Sezione tubolare - Mappa tensionale nel caso isotropo (R=1). Sezione tubolare - Mappa tensionale nel caso ortotropo (R=0.5). contorno, delle tensioni massime e minime lungo le corde A e B nel caso ortotropo (R=0.5). Viene inoltre riportata la rigidezza a torsione nel caso in cui G13 = 8 × 105 e G23 = 2 × 105 . n `e il numero di elementi con cui si vuole discretizzare il lato pi` u corto. N el `e il numero totale di elementi utilizzati nel piano di calcolo. 101 8 – Sperimentazione numerica del modello n N el 1 2 4 8 16 32 64 128 LUSAS Tabella 8.17. 8.3.6 τA,min Mt × 10 τA,max Mt × 10 τB,min Mt × 10 τB,max Mt × 10 1.7786 1.7730 1.6172 1.5898 3.2742 3.1680 3.0430 3.0391 2.0646 2.2181 2.1396 2.1313 2.4583 2.6058 2.5047 2.4974 1.6410 3.0069 2.1330 2.5267 GJt × 10−6 51.955 53.791 55.518 55.794 Sezione tubolare ortotropa (R = 0.5) - Rigidezza torsionale e tensioni estreme sulle corde A e B. Sezione scatolare La sezione in fig.8.12 consiste in una sezione tubolare con l’aggiunta di due ali orizzontali. Come `e stato gi` a mostrato in precedenza le tensioni lungo le ali sono irrilevanti, mentre le tensioni maggiori si ritrovano nei punti medi delle pareti orizzontali, sul contorno esterno. In fig.8.378.38 sono riportati i diagrammi del modulo delle tensioni, ottenuti tramite una discretizzazione LUSAS a 3920 elementi (71745 gradi di libert` a). L’andamento delle tensioni in un caso ortotropo con R = 0.5 `e simile a quello del caso isotropo, ma presenta, come nella precedente sezione tubolare, delle tensioni massime maggiori. Nella tabella 8.18 sono riportati i risultati ottenuti per le tensioni massime, nel punto medio del contorno superiore. La discretizzazione al contorno `e stata fatta seguendo un criterio di uniformit` a, proporzionando il numero di elementi alla lunghezza dei corrispondenti lati. Figura 8.37. Sezione scatolare - Mappa tensionale nel caso isotropo. 102 8 – Sperimentazione numerica del modello Figura 8.38. Sezione scatolare - Mappa tensionale nel caso ortotropo. N el R=1 τA Mt × 100 169 338 676 Tabella 8.18. 8.4 N el 6.2069 6.4732 7.3500 R = 0.5 τA Mt × 100 215 430 856 7.1178 7.5822 7.7704 Sezione scatolare - Tensioni massime. Taglio con legame ortotropo Nel problema della torsione si `e visto che lo stato tensionale pu` o essere determinato conoscendo q 23 soltanto il valore del parametro meccanico R = G G13 . In un problema di taglio generico sono necessari invece tre parametri meccanici, come `e stato sottolineato alla fine del cap.3. R= q G23 G13 , m1 = 2G13 ν31 , E3 m2 = 2G23 ν32 ; E3 (8.9) In letteratura sono disponibili risultati di confronto ricavati tramite serie numeriche solo per sezioni semplici come la rettangolare e la ellittica. I valori sono riportati da Lekhnitskii [19] e da Tolf [26]. Per sezioni di tipo diverso vengono confrontati i risultati con quelli ottenuti dal programma LUSAS come nel caso della torsione. 103 8 – Sperimentazione numerica del modello Figura 8.39. 8.4.1 Sezione rettangolare - Geometria. Sezione rettangolare Per la sezione rettangolare in fig.8.39 soggetta a taglio verticale, le tensioni tangenziali nei punti O e A possono essere espresse come τO = kO 3T , 2A τA = kA 3T ; 2A (8.10) dove kO e kA sono coefficienti ricavati in serie da Timoshenko [25] nel caso isotropo, e da Tolf [26] nel caso ortotropo. Nel caso in cui a/b = 2, discretizzando i lati con n e 2n elementi si ottengono per il caso isotropo i risultati riportati nella tabella 8.19 (ν = 0.25). Tabella 8.19. n kO kA 1 2 4 8 0.858 0.856 0.856 0.856 1.366 1.401 1.401 1.397 [25] 0.856 1.396 Sezione rettangolare - kO e kA nel caso isotropo (a/b = 2; ν = 0.25). Mantenendo lo stesso rapporto geometrico si affronta ora il caso di un composito in fibre di carbonio, utilizzato da Tolf [26]: E3 = 100GP a, G13 = 10GP a, G23 = 5GP a, ν31 = 0.3, ν32 = 0.2; 104 (8.11) 8 – Sperimentazione numerica del modello con questo tipo di legame si ha R = 0.7071, m1 = 0.06, m2 = 0.02; (8.12) Nella tabella 8.20 sono riportati i risultati in funzione del numero totale di elementi. Tabella 8.20. N el kO kA 6 14 28 0.971 0.970 0.970 1.066 1.068 1.069 [26] 0.970 1.069 Sezione rettangolare (a/b = 2) - kO e kA in un caso ortotropo (R = 0.7071; m1 = 0.06; m2 = 0.02). Invertendo il rapporto fra i lati si considera a/b = 0.5. Si ottengono per il caso isotropo i risultati riportati nella tabella 8.21 (ν = 0.25). Tabella 8.21. n kO kA 1 2 0.984 0.983 1.033 1.033 [25] 0.983 1.033 Sezione rettangolare - kO e kA nel caso isotropo (a/b = 0.5; ν = 0.25). Mantenendo sempre questo rapporto geometrico si affronta poi il caso di composito in fibre di carbonio. Nella tabella 8.22 sono riportati i risultati in funzione del numero totale di elementi. Tabella 8.22. N el kO kA 8 14 30 0.998 0.997 0.998 1.005 1.005 1.005 [26] 0.998 1.005 Sezione rettangolare (a/b = 0.5) - kO e kA in un caso ortotropo (R = 0.7071; m1 = 0.06; m2 = 0.02). 105 8 – Sperimentazione numerica del modello 8.4.2 Sezione triangolare equilatera Si prende in considerazione il triangolo equilatero riportato in fig.8.40. Nel caso di legame isotropo il centro di taglio coincide con il baricentro. Questo non accade quando il legame `e di tipo generico. Inserendo i dati sul composito precedentemente usato, si riportano nella tabella 8.23 i risultati ottenuti per l’ordinata del centro di taglio (l’ascissa `e zero perch`e l’asse y `e asse di simmetria). Figura 8.40. Tabella 8.23. Sezione triangolare - Geometria. N el Yc a 3 8 14 30 -0.16882 -0.12509 -0.12077 -0.12056 Sezione triangolare equilatera - Ascissa del centro di taglio in un caso di legame ortotropo (R = 0.7071; m1 = 0.06; m2 = 0.02). Il centro di taglio giace quindi fra il baricentro ed il lato orizzontale. Come `e stato evidenziato a riguardo del problema di taglio, la mancata coincidenza fra baricentro e centro di taglio fa insorgere un contributo tensionale di tipo torsionale. Se sollecitiamo il solido con una forza tagliante diretta secondo x, allo stato tensionale da taglio si aggiunge quello da momento torcente. In fig.8.41-8.42 `e diagrammata la componente orizzontale delle tensioni. Viene operato un confronto fra le mappe ottenute tramite il modello LUSAS e i risultati del codice agli elementi di contorno. I risultati evidenziano che le tensioni massime che si raggiungono nel caso 106 8 – Sperimentazione numerica del modello Figura 8.41. Figura 8.42. Sezione triangolare - Tensioni da taglio nel caso isotropo. Sezione triangolare - Tensioni da taglio nel caso ortotropo. 107 8 – Sperimentazione numerica del modello isotropo a met` a del lato orizzontale, vengono invece leggermente smorzate nel caso ortotropo. In quest’ultimo caso si nota che la tensione massima viene raggiunta in un punto pi` u interno, dove si risente di meno degli effetti torsionali. 8.4.3 Sezione scatolare Sollecitando la sezione di fig.8.43 con un taglio verticale pari a -10, si esaminano i casi di legame isotropo e ortotropo, concentrandosi sulla componente verticale delle tensioni tangenziali. Come legame ortotropo `e utilizzato il caso R = 0.7071, m1 = 0.06, m2 = 0.02. In questo caso le tensioni tangenziali non differiscono di molto fra i due tipi di legame. Tale risultato `e confermato anche dal modello LUSAS, costruito tramite 1776 di forma esaedrica (33057 gradi di libert` a). In fig.8.44-8.45 sono riportati le mappe della componente verticale delle tensioni tangenziali e si nota la sostanziale uguaglianza dei due casi. Figura 8.43. Sezione scatolare - Geometria. Per quanto riguarda i valori numerici vengono calcolate le componenti verticali della tensione tangenziale nel punto A (-0.442; 1.56). 108 8 – Sperimentazione numerica del modello Figura 8.44. Figura 8.45. 8.5 Sezione scatolare isotropa - Tensioni verticali da taglio. Sezione scatolare ortotropa - Tensioni verticali da taglio. Osservazioni conclusive A conclusione di questo lavoro di tesi vengono sottolineati alcuni aspetti significativi dell’esperienza svolta. Per quanto riguarda la formulazione del problema di De Saint Venant nel caso di legame ortotropo, va evidenziato che, tramite la trasposizione nel piano di calcolo, il problema `e ricondotto ad una equazione di Laplace, come nel caso isotropo. Ci` o significa che non `e necessario modificare la soluzione fondamentale da utilizzare. Sulla base di questa trasformazione di coordinate `e anche possibile esprimere le tensioni in una forma simile a quella ottenuta nel caso di legame isotropo. In alcuni casi di ortotropia molto spinta, la trasposizione del problema Tabella 8.24. N el τA v 169 338 676 2.010 2.348 2.716 Sezione scatolare - Componente verticale delle tensioni tangenziali nel punto A (Legame isotropo, ν = 0.25). 109 8 – Sperimentazione numerica del modello Tabella 8.25. N el τA v 169 338 676 1.862 2.522 2.484 Sezione scatolare - Componente verticale delle tensioni tangenziali nel punto A (Legame ortotropo, R = 0.7071, m1 = 0.06, m2 = 0.02). nel piano di calcolo compromette l’uniformit` a degli elementi e rischia di rendere l’analisi meno equilibrata. A tal proposito si `e rivelata utile la strategia di far ridefinire automaticamente al codice il numero di elementi in cui discretizzare il contorno. In riferimento all’interpolazione utilizzata sono state ricavate le espressioni delle funzioni HC nel caso di lunghezze disuniformi degli elementi. Questa maggiore generalit` a dell’interpolazione rende il codice pi` u flessibile, anche se comporta una gestione pi` u articolata dell’assemblaggio della matrice del sistema nelle variabili di contorno. Per quanto riguarda la valutazione analitica dei coefficienti integrali va evidenziata l’efficienza dell’implementazione. Tutti i contributi sono stati espressi in funzione di pochi integrali ricorrenti, definiti in modo ricorsivo. I risultati esposti in questo capitolo mostrano le prestazioni ottenibili con il modello ad elementi di contorno sviluppato. Per ogni tipo di sezione possono essere calcolate le caratteristiche geometriche, la distribuzione della funzione di ingobbamento, la rigidezza a torsione, la posizione del centro di taglio e le tensioni tangenziali. La rappresentazione delle tensioni mediante il programma SURFER, a partire dal file di output generato dal modello agli elementi di contorno, si `e rivelato uno strumento particolarmente efficace per un’immediata visualizzazione dello stato tensionale, cos`ı come la rappresentazione per curve di livello. Tali risultati possono essere valutati su sezioni di forma qualsiasi, anche pluriconnesse, e si sono dimostrati precisi anche in seguito a diversi confronti con modelli 3D ad elementi finiti realizzati tramite il programma LUSAS. L’accuratezza del codice `e determinata principalmente dall’integrazione analitica dei coefficienti e dall’interpolazione delle grandezze meccaniche, che si rivela efficace anche con pochi elementi. Nei casi in cui l’analisi necessiti comunque di un numero consistente di variabili, la gestione dinamica delle stesse, tramite puntatori, consente un uso ottimizzato della memoria. 110 8 – Sperimentazione numerica del modello Il modello numerico presenta buone caratteristiche di robustezza. Ad esempio i risultati non variano in modo sostanziale modificando la posizione delle sorgenti negli elementi di estremit` a. Altro dato interessante `e che grazie all’integrazione analitica dei contributi integrali `e possibile valutare la soluzione in punti molto vicini al contorno, senza attivare instabilit` a nel codice. La soluzione all’interno del dominio pu` o essere valutata spingendosi vicino al contorno fino ad un ordine di grandezza di 10−9 della lunghezza dell’elemento. Per quanto riguarda le conclusioni che si possono trarre dall’esperienza numerica, l’influenza dell’ortotropia risulta particolarmente significativa nella determinazione delle tensioni da torsione, pi` u che in quelle da taglio. Inoltre l’ortotropia pu` o influire sulla posizione del centro di taglio, e quindi sugli effetti torsionali provocati da sollecitazioni taglianti. Questo programma `e in definitiva uno strumento utile per l’analisi dello stato tensionale da taglio e torsione, nell’ipotesi di legame costitutivo ortotropo. In particolare pu` o risultare determinante quando si ha a che fare con sezioni compatte, per le quali non si riesce a raggiungere un livello soddisfacente di descrizione utilizzando semplici metodi manuali. 111 Bibliografia [1] AA. VV. Boundary element methods in mechanics, Amsterdam, North Holland, 1987. [2] AA. VV. Manuale di ingegneria civile, 2a ed., Bologna, Zanichelli-Esac, 1991. [3] Alarcon E.; Martin A.; Paris F. “Improved boundary elements in torsion problems”, Recent advances in BEM, Brebbia C.A. (editor ), London, Pentech Press, 1978, p. 149-165. [4] Aristodemo M.; Archin` a D. “Boundary element analysis of Kirchoff plates”, Dipartimento di arte, scienza e tecnica del costruire, Universit` a di Reggio Calabria, Report 95/1. [5] Aristodemo M.; Turco E.“Boundary element discretization of plane elasticity and plate bending problems”, International Journal for numerical methods in Engineering, vol. 37 (1994), p. 965-987. [6] Baldacci R. Scienza delle costruzioni, Torino, UTET, 1983. [7] Benvenuto E. La scienza delle costruzioni e il suo sviluppo storico, Firenze, Sansoni, 1981. [8] Brebbia C.A.; Dominguez J. Boundary Elements: an introductory course, London, McGraw-Hill Incorporated, 1989. [9] Brebbia C.A.; Telles J.C.F.; Wrobel L.C. Boundary element techniques, Berlin, Springer-Verlag, 1984. [10] Capurso M. Lezioni di scienza delle costruzioni, Bologna, Pitagora, 1971. [11] Ciambrone M.; Petrolo A.S.; Casciaro R. “Calcolo automatico dei coefficienti elastici per il modello di trave di De Saint-Venant in presenza di interazione taglio-torsione”, Dipartimento di Strutture, Universit` a della Calabria, Arcavacata di Rende (CS), 2001, Report LabMec 22, download from http://www.labmec.unical.it. [12] Chou S.I. “Determination of centers of flexure using the boundary element method”, Engineering Analysis with Boundary Elements, Great Britain, vol. 12 (1993), p. 321-324. [13] Danson D.J. “Using BEASY to solve torsion problems”, Boundary elements, Brebbia C.A.; Futagami T.; Tanaka M. (editors), Berlin, Springer-Verlag, 1983, p. 821-834. 112 Bibliografia [14] Friedman Z.; Kosmatka J.B. “Torsion and flexure of a prismatic isotropic beam using the boundary element method”, Computers & Structures, vol. 74 (2000), p. 479-494. [15] Gradshteyn I.S.; Ryzhik I.M. Table of integrals series and products, 4a ed., New York, Academic press, 1972. [16] Jaswon M.A.; Ponter A.R.S. “An integral equation solution of the torsion problem”, Proceedings of the Royal Society of London, 282(A)-1963, p. 237-246. [17] Katsikadelis J.T.; Sapountzakis E.J. “Torsion of composite bars by boundary element method”, ASCE Journal of Engineering Mechanics, vol. 111, n.9 (September 1985), p. 1197-1210. [18] Kollbrunner F.; Basler K. Torsion in structures, Berlin, Springer-Verlag, 1969. [19] Lekhnitskii S.G. Theory of Elasticity of an Anisotropic Body, Moscow, Mir publishers, 1981. [20] Leone A; Aristodemo M. “Analisi ad elementi di contorno di stati elastici piani”, Dipartimento di Strutture, Universit` a della Calabria, Arcavacata di Rende (CS), 1999, Report LabMec 5, Progetto MECOM, download from http://www.labmec.unical.it. [21] Love A.E.H. A treatise on the mathematical theory of elasticity, 4a ed., New York, Dover publications, 1944. [22] Muskhelishvili N.I. Some basic problem of the mathematical theory of elasticity, 4a ed., Moscow, Noordhoff, 1954. [23] Sapountzakis E.J. “Solution of non-uniform torsion of bars by an integral equation method”, Computers & Structures, vol. 77 (2000), p. 659-667. [24] Sokolnikoff I.S. Mathematical theory of elasticity, New York, McGraw-Hill, 1956. [25] Timoshenko S.P.; Goodier J. N. Theory of elasticity, 3a ed., Singapore, McGraw-Hill, 1970. [26] Tolf G.“Saint-Venant bending of an orthotropic beam”, Composite Structures, Great Britain, vol. 4 (1985), p. 1-14. 113
© Copyright 2026 Paperzz