Appunti del corso
Metodi Matematici
per le Applicazioni
Luigi Barletti
Dipartimento di Matematica e Informatica “Ulisse Dini”
Universit`a degli Studi di Firenze
Anno Accademico 2013/2014
ii
Indice
1 Serie di Fourier
1.1 Serie di Fourier . . . . . . . . . . . . . . . . .
1.2 Corda vibrante con estremi fissi . . . . . . .
1.3 Problema del “tamburo rettangolare” . . .
1.4 Serie di Fourier multipla e reticoli periodici
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
8
14
17
2 Problemi di Sturm-Liouville
2.1 Problema del tamburo circolare . . . . . . . . . .
2.2 Una classe di problemi di Sturm-Liouville . . . .
2.3 Armoniche Sferiche . . . . . . . . . . . . . . . . . .
2.4 Studio di alcuni sistemi in meccanica quantistica
2.4.1 L’oscillatore armonico . . . . . . . . . . .
2.4.2 L’atomo d’idrogeno . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
21
26
31
34
36
40
3 Trasformate di Fourier
3.1 Trasformata di Fourier di funzioni integrabili . . . . . . .
3.2 Teoremi di inversione . . . . . . . . . . . . . . . . . . . . .
3.3 Trasformata di Fourier di funzioni L2 . . . . . . . . . . . .
3.4 Soluzione di equazioni alle derivate parziali . . . . . . . .
3.4.1 Equazioni del trasporto e dal calore . . . . . . . .
3.4.2 Equazione delle onde . . . . . . . . . . . . . . . . .
3.4.3 Equazione di Schr¨
odinger per la particella libera
3.5 Il teorema del campionamento . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
43
50
54
56
56
57
59
61
4 Distribuzioni
4.1 Distribuzioni . . . . . . . . . . . . . . . . . . . . . .
4.2 Derivazione di distribuzioni . . . . . . . . . . . . . .
4.3 Trasformata di Fourier di distribuzioni temperate
4.4 Distribuzione delta periodica . . . . . . . . . . . . .
4.5 Soluzione dell’equazione di Poisson . . . . . . . . .
4.6 Soluzione dell’equazione delle onde in R3 e in R2 .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
65
69
72
80
82
85
5 Semigruppi
5.1 Semigruppi di operatori . . . . . . . . . . . .
5.2 Gruppo generato da un operatore limitato .
5.3 Cenni sul caso del generatore non-limitato .
5.4 Sorgenti e perturbazioni . . . . . . . . . . . .
5.5 Equazione di trasporto con collisioni . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
89
. 89
. 92
. 94
. 98
. 102
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iv
INDICE
A Richiami su spazi lineari e spazi Lp
107
B Esercizi
111
Bibliografia
121
Capitolo 1
Serie di Fourier
1.1
Serie di Fourier
Consideriamo una funzione f ∶ R → C che sia 2π-periodica, ovvero tale che
f (x + 2π) = f (x),
per ogni x ∈ R.
Studieremo la possibilit`
a di sviluppare tale funzione in una serie del tipo
f (x) = ∑ fn einx .
(1.1)
n∈Z
La (1.1) per il momento si deve intendere soltanto come un’espressione formale il cui significato
preciso si delineer`
a attraverso i risultati che dimostreremo in seguito. Osserviamo innanzitutto
che dall’identit`
a
⎧
π
⎪
1
⎪1, se n = 0
inx
(1.2)
∫ e dx = ⎨
⎪
2π −π
⎪
⎩0, se n ∈ Z ∖ {0}
segue, almeno formalmente,
π
1
−inx
fn =
dx.
(1.3)
∫ f (x) e
2π −π
Notiamo che, se f ∈ L1 (−π, π) i numeri complessi fn sono ben definiti e prendono il nome di
coefficienti di Fourier (CdF) di f . Anche se i CdF di f sono ben definiti, la serie a secondo
membro della (1.1), che diremo serie di Fourier (SdF) di f , non `e necessariamente convergente.
Osservazione 1.1 Supponiamo che f assuma solamente valori reali. In questo caso si ha
f n = f−n
per cui possiamo scrivere
∑ fn e
n∈Z
inx
∞
∞
n=1
n=1
= f0 + ∑ (fn einx + f−n e−inx ) = f0 + ∑ 2 Re (fn einx )
∞
= f0 + ∑ 2 (Re fn cos(nx) − Im fn sin(nx)) .
n=1
Si ottiene cos`ı la serie di Fourier reale
∞
f (x) = f0 + ∑ an cos(nx) + bn sin(nx),
n=1
1
(1.4)
2
CAPITOLO 1. SERIE DI FOURIER
dove
π
1
∫ f (x) dx,
2π −π
π
1
an = 2 Re fn = ∫ f (x) cos(nx) dx, n ≥ 1,
π −π
π
1
bn = −2 Im fn = ∫ f (x) sin(nx) dx, n ≥ 1.
π −π
Ogni risultato dimostrato per la SdF complessa varr`a in particolare per la SdF reale.
f0 =
(1.5)
Per prima cosa ci occupiamo della convergenza puntuale.
Lemma 1.2 (Disuguaglianza di Bessel) Se f ∈ L2 (−π, π) si ha
2
∑ ∣fn ∣ ≤
n∈Z
π
1
2
∫ ∣f (x)∣ dx.
2π −π
(1.6)
In particolare, limn→±∞ fn = 0.
Dimostrazione Per ogni N = 0, 1, 2, . . . e per ogni x ∈ R poniamo
N
sN (x) ∶= ∑ fn einx .
(1.7)
n=−N
Utilizzando la relazione (1.2) e la definizione (1.3), possiamo scrivere
0≤∫
=∫
π
−π
π
2
∣f (x)∣ dx + ∫
=∫
−π
π
−π
π
−π
2
∣f (x) − sN (x)∣ dx
2
∣sN (x)∣ dx − ∫
π
−π
N
2
f (x) sN (x) dx − ∫
π
−π
f (x) sN (x) dx
2
∣f (x)∣ dx + 2π ∑ {∣fn ∣ − fn fn − fn fn }
n=−N
=∫
π
−π
2
N
2
∣f (x)∣ dx − 2π ∑ ∣fn ∣ .
n=−N
Dunque per ogni N = 0, 1, 2, . . . si ha
N
2
∑ ∣fn ∣ ≤
n=−N
π
1
2
∫ ∣f (x)∣ dx,
2π −π
da cui segue la tesi passando al limite per N → ∞.
◻
Dimostriamo ora che la propriet`
a di decadimento dei coefficienti di Fourier per n → ∞ vale pi`
u in
generale per le funzioni di classe L1 .
Corollario 1.3 (Lemma di Riemann-Lebesgue per le serie di Fourier) Se f ∈ L1 (−π, π)
si ha limn→±∞ fn = 0.
Dimostrazione Poich´e C0∞ (−π, π) `e denso in L1 (−π, π) (Teorema A.8), fissato > 0 esiste
π
ϕ ∈ C0∞ (−π, π) tale che ∫−π ∣f (x) − ϕ(x)∣ dx ≤ . Possiamo perci`o scrivere
∣∫
π
−π
f (x)e−inx dx∣ ≤ ∣ ∫
≤∫
π
−π
π
−π
(f − ϕ)(x) e−inx dx∣ + ∣ ∫
∣f (x) − ϕ(x)∣ dx + ∣ ∫
π
−π
π
−π
ϕ(x)e−inx dx∣
ϕ(x)e−inx dx∣.
1.1. SERIE DI FOURIER
3
Poich´e la tesi vale per ϕ (che sta in L2 (−π, π)), l’ultimo integrale (che `e il coefficiente di Fourier
di ϕ moltiplicato per 2π) `e in modulo pi`
u piccolo di per ∣n∣ sufficientemente grande. Per tali n
π
si ha quindi ∣∫−π f (x)e−inx dx∣ ≤ 2, da cui la tesi.
◻
Consideriamo ora, per ogni N = 0, 1, 2, . . ., la seguente funzione
N
DN (x) ∶= ∑ einx ,
x ∈ R,
(1.8)
n=−N
detta nucleo di Dirichlet. Il nucleo di Dirichlet ci permette di scrivere le somme parziali (1.7) in
forma di convoluzione. Infatti si ha
N
sN (x) = ∑
n=−N
π
einx
−iny
dy
∫ f (y)e
2π −π
π
π
1
1
=
∫ f (y)DN (x − y) dy =
∫ f (x − y)DN (y) dy
2π −π
2π −π
(1.9)
dove, all’ultimo passaggio, si `e sfruttata la periodicit`a di f e DN .
Moltiplicando DN (x) per eix − 1 si ottiene
N
(eix − 1)DN (x) = ∑ ei(n+1)x − einx = ei(N +1)x − e−iN x
n=−N
e, moltiplicando per e−ix/2 ,
(eix/2 − e−ix/2 )DN (x) = ei(N +1/2)x − e−i(N +1/2)x ,
ovvero
DN (x) =
sin(N + 21 )x
.
sin x2
(1.10)
La rappresentazione delle somme parziali come convoluzione col nucleo di Dirichlet ci permette di
dimostrare un importante risultato di convergenza puntuale della serie di Fourier.
Teorema 1.4 Sia f ∶ R → C una funzione 2π-periodica tale che f ∈ L1 (−π, π) e sia x ∈ R un
punto dove esistono i limiti destro f + (x) e sinistro f − (x), ed esiste δ > 0 tale che
δ
∫
0
δ
∫
0
∣f (x + h) − f + (x)∣
dh < ∞
h
∣f (x − h) − f − (x)∣
dh < ∞
h
(1.11)
1 +
[f (x) + f − (x)] .
2
(1.12)
(detta “condizione del Dini”). Allora
∑ fn e
n∈Z
inx
=
In particolare, si vede facilmente che la serie di Fourier converge puntualmente a f nei punti in
cui questa `e Lipschitziana.
π
1
Dimostrazione Dalla definizione (1.8) segue che 2π
∫−π DN (y) dy = 1 e, poich´e DN `e una funzione
pari,
π
0
1
1
1
∫ DN (y) dy =
∫ DN (y) dy = .
2π 0
2π −π
2
4
CAPITOLO 1. SERIE DI FOURIER
Dunque, usando la (1.10) e la (1.9), potremo scrivere
1 +
[f (x) + f − (x)]
2
0 f (x − y) − f + (x)
π f (x − y) − f − (x)
1
1
= ∫
DN (y) dy + ∫
DN (y) dy
π −π
2
π 0
2
π
1
= ∫ gx (y) sin (N + 21 )y dy
π −π
π
π
1
1
= ∫ [gx (y) cos y2 ] sin N y dy + ∫ [gx (y) sin y2 ] cos N y dy
π −π
π −π
sN (x) −
dove la funzione gx (y) `e cos`ı definita:
⎧
f (x − y) − f + (x)
⎪
⎪
, per y ∈ [−π, 0),
⎪
⎪
⎪
2 sin y2
⎪
⎪
⎪
⎪
per y = 0,
gx (y) ∶= ⎨0,
⎪
⎪
−
⎪
⎪
f
(x
−
y)
−
f
(x)
⎪
⎪
, per y ∈ (0, π).
⎪
⎪
⎪
2 sin y2
⎩
Dalla condizione del Dini segue che la funzione gx (y) `e integrabile nell’intorno dell’origine I =
(−δ, δ). Inoltre gx (y) `e di classe L1 in (−π, π) ∖ I (essendo f ∈ L1 (−π, π) e ∣sin y2 ∣ > 0 fuori da I).
Dunque le funzioni gx (y) cos y2 e gx (y) sin y2 sono di classe L1 (−π, π) e quindi (Corollario 1.3) i
loro CdF reali
π
1
y
∫ [gx (y) cos 2 ] sin N y dy,
π −π
π
1
y
∫ [gx (y) sin 2 ] cos N y dy,
π −π
tendono a zero per N → ∞, da cui la tesi.
◻
Dimostriamo ora un risultato di convergenza uniforme.
Teorema 1.5 Sia f ∶ R → C una funzione 2π-periodica, continua e regolare a tratti.1 Allora
∑ ∣fn ∣ < ∞
(1.13)
n∈Z
e la serie di Fourier converge a f uniformemente su R.
Dimostrazione La derivata f ′ di f `e limitata con un numero finito di di discontinuit`a di prima
specie per cui, indicati con fn′ i CdF di f ′ , si dimostra facilmente che `e possibile integrare per
parti in (1.3) ottenendo
fn =
π
π
i
i
i
f (x) e−inx ∣ −
f ′ (x) e−inx dx = − fn′ .
∫
−π
2nπ
2nπ −π
n
Pertanto, utilizzando la disuguaglianza ab ≤
∣fn ∣ =
1
2
(a2 + b2 ),
∣fn′ ∣ 1
1
2
≤ (∣fn′ ∣ + 2 ) .
n
2
n
Poich´e chiaramente f ′ ∈ L2 (−π, π), per i coefficienti fn′ vale la disuguaglianza di Bessel (1.6), per
cui si ha
1
1
′ 2
∑ ∣fn ∣ ≤ ∑ (∣fn ∣ + 2 ) < +∞.
n
n∈Z
n∈Z 2
1 Per funzione “regolare a tratti” in un intervallo [a, b] ⊂ R si intende che la funzione `
e derivabile in [a, b] tranne
che in un numero finito di punti, in cui per`
o esistono finiti i limiti destro e sinistro della derivata. Inoltre, diciamo
che una funzione `
e regolare a tratti in R se lo `
e in ogni intervallo [a, b] ⊂ R.
1.1. SERIE DI FOURIER
5
Per il criterio della convergenza totale [9] la serie di Fourier di f risulta quindi uniformemente
convergente. Poich´e in ogni punto x esistono finiti i limiti destro e sinistro di f ′ , si pu`o verificare
facilmente che la condizione del Dini `e soddisfatta e possiamo concludere dal Teorema 1.4 che la
serie di Fourier converge proprio a f .
◻
Osservazione 1.6 Il precedente teorema vale nell’ipotesi pi`
u generale che f ∶ R → C sia 2πperiodica, assolutamente continua su R e tale che f ′ ∈ L2 (−π, π).
Ricordiamo che una funzione f si dice assolutamente continua (AC) su un intervallo [a, b] se per
ogni > 0 esiste δ tale che ∑ni=1 ∣f (xi ) − f (yi )∣ < per ogni collezione finita di intervalli disgiunti
(x1 , y1 ), (x2 , y2 ), . . . , (xn , yn ) contenuti in [a, b] e tali che ∑ni=1 yi − xi < δ. Si dice poi che f `e AC
su R se `e AC su ogni [a, b] ⊂ R.
il risultato fondamentale sulle funzioni AC `e il seguente. Se f `e AC su [a, b] allora f ′ esiste quasi
y
ovunque con f ′ ∈ L1 (a, b) e si ha f (y) − f (x) = ∫x f ′ (t) dt, per ogni a ≤ x ≤ y ≤ b. Viceversa,
x
1
se g ∈ L (a, b), allora la funzione ∫a g(t) dt `e AC su [a, b] e ha quasi ovunque per derivata g.
Dunque si pu`
o sinteticamente dire che le funzioni assolutamente continue sono quelle per cui vale
il teorema fondamentale del calcolo (vedi [10]).
La dimostrazione del Teorema 1.5 in queste ipotesi `e sostanzialmente identica a quella fornita
sopra. L’unica cosa che cambia `e la verifica della condizione del Dini, che `e un po’ pi`
u delicata:
posto x = 0 per semplicit`
a possiamo scrivere
δ
∫
0
δ
δ
h ∣f ′ (ξ)∣
δ ∣f ′ (ξ)∣
∣f (h) − f (0)∣
dh ≤ ∫ ∫
dξ dh = ∫ ∫
dh dξ
h
h
h
0
0
0
ξ
=∫
δ
0
∣f ′ (ξ)∣ log (δ/ξ) dξ ≤ ∥f ′ ∥L2 (0,δ) ∥log (δ/ξ)∥L2 (0,δ) < ∞,
dove si `e usata la disuguaglianza di H¨
older (si lascia al lettore la verifica del fatto che log (δ/ξ) ∈
2
L (0, δ)). La verifica della condizione del Dini da sinistra si fa allo stesso modo.
Il successivo risultato riguarda la convergenza “in media quadratica”, cio`e nella norma L2 . Si
tratta di una convergenza particolarmente “naturale” per la serie di Fourier in quanto, come sar`a
sottolineato pi`
u avanti, questo risultato ha una chiara interpretazione nell’ambito della teoria degli
spazi di Hilbert.
Teorema 1.7 Se f ∈ L2 (−π, π) si ha che
π
2
∣f (x) − sN (x)∣ dx = 0
(1.14)
π
1
∫ f (x) g(x) dx = ∑ fn g n .
2π −π
n∈Z
(1.15)
lim ∫
N →∞
−π
e inoltre, se anche g ∈ L2 (−π, π),
In particolare, prendendo g = f , si avr`
a
π
1
2
2
∫ ∣f (x)∣ dx = ∑ ∣fn ∣ ,
2π −π
n∈Z
(1.16)
formula nota come Teorema di Parseval.
Dimostrazione Ricordiamo che L2 (−π, π) `e uno spazio di Hilbert con il prodotto hermitiano
⟨f, g⟩ ∶= ∫
π
−π
f (x) g(x) dx,
f, g ∈ L2 (−π, π)
(1.17)
6
CAPITOLO 1. SERIE DI FOURIER
1/2
π
1/2
2
` noto che le funzioni di classe C ∞ (−π, π)
e la norma ∥f ∥2 = ⟨f, f ⟩
= ( ∫−π ∣f (x)∣ dx) . E
0
2
formano un sottospazio denso di L (−π, π) (Teorema A.8) per cui, fissato > 0, esiste una funzione
ϕ ∈ C0∞ (−π, π) tale che
∥f − ϕ∥2 ≤ /3.
` evidente che ϕ pu`
E
o essere estesa periodicamente a una funzione di classe C 1 (R). In base al
teorema precedente, la serie di Fourier di ϕ converge a ϕ uniformemente su R (e quindi anche
inx
in norma L2 su (−π, π)). Siano ϕn i coefficienti di Fourier di ϕ e sia σN (x) ∶= ∑N
la
n=−N ϕn e
corrispondente successione delle somme parziali. Per N sufficientemente grande si avr`a dunque
∥ϕ − σN ∥2 ≤ /3.
I coefficienti di Fourier e le somme parziali di f − ϕ sono dati, rispettivamente, da fn − ϕn e da
sN (x)−σN (x). Poich´e f −ϕ ∈ L2 (−π, π), utilizzando la relazione (1.2) e la disuguaglianza di Bessel
possiamo scrivere
N
2
1/2
∥sN − σN ∥2 = (2π ∑ ∣fn − ϕn ∣ )
n=−N
2
1/2
≤ (2π ∑ ∣fn − ϕn ∣ )
≤ ∥f − ϕ∥2 ≤ /3.
n∈Z
Pertanto, usando la disuguaglianza triangolare, si ottiene
∥f − sN ∥2 ≤ ∥f − ϕ∥2 + ∥ϕ − σN ∥2 + ∥σN − sN ∥2 ≤ ,
il che prova il risultato di convergenza (1.14). Per dimostrare la (1.15) osserviamo che
N
π
π
1
1 N
inx
∑ fn ∫ e g(x) dx = ∑ fn g n ,
∫ sN (x)g(x) dx =
2π −π
2π n=−N
−π
n=−N
cio`e
N
1
⟨sN , g⟩ = ∑ fn g n .
2π
n=−N
Ricordando che il prodotto Hermitiano in uno spazio di Hilbert `e continuo, passando al limite per
N → +∞ si ottiene la (1.15).
◻
Come corollario immediato del precedente teorema si ha l’univocit`a dei coefficienti di Fourier per
le funzioni L2 .
Corollario 1.8 Siano f e g due funzioni di classe L2 (−π, π) con gli stessi coefficienti di Fourier.
Allora f (x) = g(x) quasi ovunque.
Dimostrazione Poich´e i coefficienti di Fourier di h ∶= f − g sono tutti nulli, dal teorema di
Parseval segue che ∥h∥2 = 0 e quindi h(x) = 0 quasi ovunque.
◻
Osservazione 1.9 Se f assume solo valori reali, utilizzando le relazioni fn = 21 (an − ibn ), f−n =
1
(an + ibn ) (che seguono dalla definizione (1.5) di an e bn ) si ottiene il teorema di Parseval reale:
2
∞
π
1
a2n + b2n
2
2
.
∫ ∣f (x)∣ dx = f0 + ∑
2π −π
2
n=1
(1.18)
Come abbiamo anticipato, il risultato del Teorema 1.7 ha un chiaro significato geometrico nell’ambito della teoria degli spazi di Hilbert.
1.1. SERIE DI FOURIER
7
Corollario 1.10 Posto
1
en (x) ∶= √ einx ,
(1.19)
2π
l’insieme B ∶= {en ∣ n ∈ Z} `e una base ortonormale dello spazio di Hilbert L2 (−π, π), ovvero un
sottoinsieme numerabile, ortonormale e completo.2
Dimostrazione L’ortonormalit`
a di B segue dall’eq. (1.2) che implica
⟨em , en ⟩ = δmn ,
m, n ∈ Z.
(1.20)
La completezza di B segue dal Teorema 1.7, in quanto esso ci dice che ogni funzione f ∈ L2 (−π, π)
pu`
o essere approssimata con precisione arbitraria da combinazioni lineari finite (le somme parziali
sN ) delle funzioni en .
◻
Osservazione 1.11 Osseviamo che il CdF fn `e proporzionale alla componente ⟨f, en ⟩ del “vettore” f nella “direzione” en :
fn =
π
1
1
−inx
dx = √ ⟨f, en ⟩.
∫ f (x) e
2π −π
2π
La serie di Fourier e il teorema di Parseval possono essere quindi scritti nella forma
f = ∑ ⟨f, en ⟩ en ,
2
2
∥f ∥2 = ∑ ∣⟨f, en ⟩∣ ,
n∈Z
(1.21)
n∈Z
che vale, pi`
u in generale, per qualunque base ortonormale di L2 (−π, π). Il teorema di Parseval,
dunque, non `e altro che il teorema di Pitagora in uno spazio a dimensione infinita.
Una conseguenza immediata del Corollario 1.10 `e la seguente.
Corollario 1.12 L’applicazione
f↦
√
2π (. . . , f−1 , f0 , f1 , . . .)
che a f associa la successione dei suoi coefficienti di Fourier (moltiplicati per
isomorfismo isometrico F fra gli spazi di Hilbert L2 (−π, π) e `2 (Z, C).
√
2π) definisce un
Dimostrazione La dimostrazione `e lasciata per esercizio. Ricordiamo che `2 (Z, C) `e lo spazio di
2 1/2
Hilbert delle successioni (. . . , a−1 , a0 , a1 , . . .), con an ∈ C per ogni n ∈ Z, tali che ( ∑n∈Z ∣an ∣ )
+∞.
<
◻
(k)
Derivazioni successive Per k = 0, 1, 2, . . ., indichiamo con fn i coefficienti di Fourier della
derivata k-esima f (k) di f . Nel corso della dimostrazione del Teorema 1.5 abbiamo gi`a visto che
(1)
fn = in fn . Ragionando per ricorrenza, se f ∈ C k (R), si otterr`a la seguente formula
fn(k) = (in)k fn
(1.22)
che lega i CdF della f e quelli delle sue derivate. Osserviamo quindi che la derivazione di f si
rilegge sui CdF fn come moltiplicazione per in (questo significa, fra l’altro, che a una maggiore
regolarit`
a di f corrisponde una maggiore rapidit`a di convergenza della SdF). Intuitivamente, si
d
pu`
o pensare l’operatore lineare di derivazione dx
come rappresentato nella base {en ∣ n ∈ Z} dalla
matrice diagonale (con infinite righe e infinite colonne)
Dnm = ⟨
d
em , en ⟩ = in δnm ,
dx
n, m ∈ Z.
2 Per “completo” si intende che ogni vettore di L2 (−π, π) `
e approssimabile con precisione arbitraria tramite
combinazioni lineari finite di elementi di B.
8
CAPITOLO 1. SERIE DI FOURIER
Convoluzioni Se f e g sono due funzioni 2π-periodiche, di classe L1 (−π, π), definiamo la
convoluzione di f con g come la funzione
(f ∗ g)(x) = ∫
π
−π
f (x − y) g(y) dy = ∫
π
−π
f (y) g(x − y) dy = (g ∗ f )(x).
(1.23)
Risulta che f ∗ g `e ancora una funzione 2π-periodica di classe L1 (−π, π). Si mostri per esercizio
che i suoi coefficienti di Fourier sono dati da:
(f ∗ g)n = 2π fn gn .
Dunque, a meno di un fattore 2π, l’n-esimo coefficiente della convoluzione di f con g `e il prodotto
dell’n-esimo coefficiente di f con l’n-esimo coefficiente di g.
La Serie di Fourier come sviluppo di Laurent Osserviamo che la SdF (1.1) pu`o essere
riguardata come “traccia” sulla circonferenza unitaria nel piano complesso della serie di Laurent
f (z) ∶= ∑ fn z n .
(1.24)
n∈Z
n
Poich´e la parte ascendente della serie di Laurent, ∑+∞
n=0 fn z , ha un raggio di convergenza R, mentre
−∞
n
la parte discendente ∑n=−1 fn z ha un “anti-raggio di convergenza” r (cio`e la serie converge per
∣z∣ > r e non converge per ∣z∣ < r), allora la serie di Laurent completa avr`a una corona circolare
di convergenza. La serie di Fourier pu`o convergere se r ≤ 1 ≤ R. Nel caso r < 1 < R si ha che
∑n∈Z fn einx ) `e una funzione analitica (restrizione al cerchio unitario della funzione f (z), analitica
nella corona circolare r < ∣z∣ < R).
Funzioni 2`-periodiche Sia ` > 0. Se f ∶ R → C `e 2`-periodica, allora g(x) ∶= f ( π` x) `e
2π-periodica. Lo sviluppo in SdF di g porta a uno sviluppo in serie di Fourier 2`-periodica di f :
nπ
π
f (x) = g ( x) = ∑ fn ei ` x
`
n∈Z
π
π
1
1
`
−inx
−inx
fn ∶= gn =
dx =
dx
∫ g(x) e
∫ f ( x) e
2π −π
2π −π
π
`
1
−i nπ x
=
∫ f (x) e ` dx.
2` −`
(1.25)
(1.26)
` evidente che tutti i risultati dimostrati per la SdF 2π-periodica valgono pi`
E
u in generale per la
SdF 2`-periodica (a meno di evidenti modifiche alle costanti che compaiono nelle formule).
1.2
Corda vibrante con estremi fissi
Come esempio fondamentale di applicazione della serie di Fourier, studiamo in dettaglio il problema
della corda vibrante con estremi fissi, ovvero l’equazione delle onde unidimensionale con condizioni
al contorno di Dirichlet e dati iniziali di Cauchy:
⎧
utt (x, t) = c2 uxx (x, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(0, t) = u(`, t) = 0,
⎨
⎪
u(x, 0) = ϕ(x),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ ut (x, 0) = ψ(x),
x ∈ (0, `), t > 0,
t ≥ 0,
x ∈ (0, `),
(1.27)
x ∈ (0, `).
Tale sistema descrive il comportamento di un mezzo elastico unidimensionale ideale e, in prima
approssimazione, pu`
o essere usata per descrivere le vibrazioni di una corda, ad esempio quella
1.2. CORDA VIBRANTE CON ESTREMI FISSI
9
di uno strumento musicale, al variare del tipo di eccitazione iniziale (pizzicata, percossa, ecc.).
In questo caso u(x, t) rappresenta lo scostamento trasversale della corda nel punto x all’istante t
dalla posizione di riposo u(x, t) = 0.
La nostra discussione inizier`
a in modo “formale”, nel senso che cercheremo di ricavare un’espressione della soluzione senza preoccuparci della sua effettiva buona definizione, n´e tantomeno della
sua regolarit`
a. La questione se l’espressione trovata sia effettivamente una soluzione del problema,
in senso rigoroso, sar`
a oggetto di una discussione successiva.
Per cominciare, tentiamo una soluzione a variabli separate, cio`e del tipo
u(x, t) = X(x)T (t).
Sostituendo nella prima delle (1.27) otteniamo
X(x)T ′′ (t) = c2 X ′′ (x)T (t)
e, dividendo per c2 X(x)T (t)
T ′′ (t) X ′′ (x)
=
.
c2 T (t)
X(x)
Poich´e al primo e al secondo membro di questa equazione ci sono, rispettivamente, una funzione
della sola t e una funzione della sola x, l’unica possibilit`a affinch´e l’uguaglianza valga per ogni x
e t `e che le due espressioni siano costanti. Dovremo perci`o imporre la condizione
T ′′ (t) X ′′ (x)
=
=µ
c2 T (t)
X(x)
(1.28)
dove µ `e una costante. Inoltre, la condizione al contorno (la seconda delle (1.27)) sar`a sicuramente
soddisfatta se X(0) = X(`) = 0. Siamo perci`o condotti a risolvere il problema (detto di SturmLiouville) di trovare se esistono costanti µ e funzioni X tali che
⎧
′′
⎪
⎪ X (x) = µX(x),
⎨
⎪
⎪
⎩ X(0) = X(`) = 0.
x ∈ (0, `),
(1.29)
Osservazione 1.13 Come vedremo un po’ meglio nel capitolo successivo, il problema di SturmLiouville (1.29) `e interpretabile come il problema di trovare gli autovalori di un operatore lineare
(in questo caso la derivata seconda con condizioni di Dirichlet) che agisce su un certo spazio di
funzioni. Le costanti µ e le corrispondenti funzioni X (non identicamente nulle) che risolvono tale
problema saranno perci`
o chiamate “autovalori” e “autofuzioni”. In particolare, l’insieme degli
autovalori `e chiamato spettro dell’operatore.
La soluzione generale dell’equazione differenziale X ′′ = µX `e
X(x) = aeλx + be−λx ,
µ = λ2 ,
(1.30)
dove a e b sono costanti arbitrarie (in generale complesse). Imponendo la condizione X(0) =
X(`) = 0 otteniamo il sistema
⎧
⎪
⎪a + b = 0
⎨ λ`
⎪ ae + be−λ` = 0.
⎪
⎩
Tale sistema ammette soluzioni che non siano quella banale (a = b = 0), se e solo se
1
det ( λ`
e
1
) = e−λ` (1 − e2λ` ) = 0,
e−λ`
10
CAPITOLO 1. SERIE DI FOURIER
ovvero se e solo se
nπ
,
n ∈ Z.
`
Sostituendo ikn per λ nella (1.30), e tenuto conto della condizione a = −b, si ottiene, per ogni n ∈ Z
fissato, la soluzione
nπ 2
Xn (x) = A sin(kn x),
µn = (ikn )2 = − ( ) ,
`
con A = 2ia costante arbitraria. Notiamo che per n = 0 la soluzione `e identicamente nulla (e
quindi non `e un’autofunzione) e che −n e n danno la stessa soluzione. Prendendo A = 1 abbiamo
cos`ı individuato la famiglia di coppie autofunzione-autovalore che risolvono il problema di SturmLiouville (1.29):
nπ
Xn (x) = sin(kn x),
µn = −kn2 ,
kn =
,
n = 1, 2, . . .
(1.31)
`
λ = ikn = i
Adesso, tornando alla (1.28), per ogni µ = µn , troviamo un’equazione per T (t),
T ′′ (t) = µn c2 T (t) = −(ckn )2 T (t),
che, non imponendo ulteriori condizioni, ha la soluzione generica
Tn (t) = A cos(ωn t) + B sin(ωn t),
(1.32)
dove si `e posto ωn = ckn = cnπ/`, con A e B costanti arbitrarie. Dunque, in definitiva, per ogni n
intero positivo, abbiamo trovato una soluzione a variabili separate
un (x, t) = Xn (x)Tn (t) = An cos(ωn t) sin(kn x) + Bn sin(ωn t) sin(kn x),
(1.33)
` chiaro che ogni un , per costruzione, soddisfa l’equazione delle
con An e Bn costanti arbitrarie. E
onde e soddisfa le condizioni al contorno di Dirichlet, e lo stesso si pu`o dire per ogni combinazione
lineare finita delle un . Tuttavia, in generale, tali soluzioni non soddisfano le condizioni iniziali
(o meglio soddisfano condizioni iniziali molto speciali, cio`e combinazioni lineari finite di seni e
coseni). Ma la teoria della serie di Fourier ci dice che ogni funzione definita su un intervallo
(purch´e sufficientemente regolare) `e una combinazione lineare infinita di seni e coseni! Perci`o
l’idea `e quella di cercare la soluzione pi`
u generale del nostro problema come combinazione lineare
infinita delle un :
∞
u(x, t) = ∑ An sin(kn x) cos(ωn t) + Bn sin(kn x) sin(ωn t).
(1.34)
n=1
Se vogliamo che u soddisfi i dati iniziali, otteniamo le condizioni
∞
∞
∑ An sin(kn x) = ϕ(x),
∑ ωn Bn sin(kn x) = ψ(x),
n=1
n=1
x ∈ (0, `).
Possiamo interpretare queste equazioni come sviluppi in serie di Fourier delle funzioni ϕ e ψ estese
in modo dispari (perch´e sono sviluppi in soli seni) nell’intervallo [−`, `]. Dunque, le condizioni
iniziali sono (almeno formalmente) soddisfatte se An e ωn Bn sono i coefficienti di Fourier delle
funzioni ϕ e ψ, intese come prolungamento dispari, ovvero
An =
2 `
1 `
∫ ϕ(x) sin(kn x) dx = ∫ ϕ(x) sin(kn x) dx
` −`
` 0
(1.35)
Bn =
`
`
1
2
∫ ψ(x) sin(kn x) dx =
∫ ψ(x) sin(kn x) dx.
`ωn −`
`ωn 0
(1.36)
Con tale scelta dei coefficienti An e Bn , la (1.34) `e la nostra soluzione formale del problema (1.27).
Prima di discuterne il significato fisico, preoccupiamoci ora di dimostrare sotto quali condizioni la
soluzione trovata `e effettivamente una soluzione in senso rigoroso.
1.2. CORDA VIBRANTE CON ESTREMI FISSI
11
Osservazione 1.14 Nonostante che il problema (1.27) sia formulato per istanti successivi a quello
iniziale (t ≥ 0) dimostreremo che la soluzione `e in realt`a ben definita per tutti i tempi t ∈ R. Ci`o
poteva essere prevedibile osservando che, cambiando t in −t, il problema (1.27) resta invariato
(salvo prendere il dato −ψ al posto di ψ). In altre parole, le propriet`a matematiche del problema
non dipendono dalla direzione del tempo.
Teorema 1.15 Se ϕ ∈ C 2 [0, `] e ψ ∈ C 1 [0, `], con ϕ′′ e ψ ′ regolari a tratti,3 e se ϕ(0) = ϕ(`) =
ϕ′′ (0) = ϕ′′ (`) = ψ(0) = ψ(`) = 0, allora la funzione u(x, t) definita da (1.34), (1.35), (1.36), `e
soluzione regolare (cio`e di classe C 2 ([0, `] × R)) del problema (1.27).
Dimostrazione Consideriamo ϕ e ψ estese in modo dispari sull’intervallo (−`, `). Come si pu`o
facilmente verificare, le ipotesi del teorema assicurano che le estensioni 2`-periodiche di ϕ, ϕ′ , ϕ′′ ,
ψ e ψ ′ a tutto R sono continue e regolari a tratti. Dunque possiamo applicare il Teorema 1.5, in
particolare, alle funzioni ϕ, ϕ′′ , ψ e ψ ′ per cui, indicati con ϕn , ϕ′′n , ψn e ψn′ i CdF di tali funzioni
si ha
∞
∞
′′
∞
∞
′
∑ ∣ϕn ∣ < ∞,
∑ ∣ϕn ∣ < ∞,
∑ ∣ψn ∣ < ∞,
∑ ∣ψn ∣ < ∞.
n=1
n=1
n=1
n=1
Ora, poich´e An = ϕn e ωn Bn = ψn , si ha chiaramente
∣un (x, t)∣ ≤ ∣An ∣ + ∣Bn ∣ = ∣ϕn ∣ + ∣
ψn
∣,
ωn
∣
1
∂ 2 un
(x, t)∣ ≤ ∣kn2 An ∣ + ∣kn2 Bn ∣ = ∣ϕ′′n ∣ + ∣ψn′ ∣,
∂x2
c
∣
∂ 2 un
(x, t)∣ ≤ ∣ωn2 An ∣ + ∣ωn2 Bn ∣ = ∣c2 ϕ′′n ∣ + ∣cψn′ ∣,
∂t2
per ogni x ∈ [0, `] e t ∈ R. Poich´e, come abbiamo appena visto, i membri di destra di queste
disuguaglianze sono i termini di serie convergenti, applicando il criterio della convergenza totale
si ottiene che la serie delle un (x, t) e delle sue derivate fino al secondo ordine sono uniformemente
convergenti. Pertanto vale il teorema di derivazione per serie e possiamo concludere che u ∈
C 2 ([0, `] × R) con utt = c2 uxx . Inoltre, chiaramente, valgono le condizioni iniziali e quelle al
contorno.
◻
Osservazione 1.16 Se si suppone meno regolarit`a sui dati iniziali, la serie che definisce u potr`a
essere ancora convergente ma non avere la regolarit`a necessaria per poter derivare in senso classico.
Sappiamo ad esempio (se veda l’Osservazione 1.6) che il teorema di convergenza uniforme vale pi`
u
2
in generale per funzioni assolutamente continue con derivata L , e si pu`o infatti dimostrare [12]
che se ϕ `e AC in [0, `], se ϕ′ e ψ sono L2 in [0, `], e se ϕ(0) = ϕ(`) = 0, allora la serie (1.34)
`e assolutamente convergente a una funzione che `e soluzione generalizzata (o “debole”, si veda il
Capitolo 4) del problema (1.27).
Per capire meglio il significato fisico della soluzione (1.34), osserviamo che essa `e data dalla sovrapposizione di infinite funzioni un , che sono dette armoniche. Riscriviamo l’armonica un nel
modo seguente:
un (x, t) = αn sin(ωn t + γn ) sin(kn x),
(1.37)
dove abbiamo introdotto l’ampiezza αn e la fase γn date da
αn =
3 Vedi
nota a pag. 4.
√
A2n + Bn2 ,
cos γn = √
Bn
A2n + Bn2
.
12
CAPITOLO 1. SERIE DI FOURIER
n=1
n=2
n=3
n=4
Figura 1.1: Profili delle prime quattro armoniche della corda vibrante con estremi fissi. Sono evidenziati
i punti nodali.
Osserviamo quindi che un si comporta come un’onda stazionaria, ovvero un profilo costante
sin(kn x) modulato armonicamente nel tempo dall’ampiezza oscillante αn sin(ωn t+γn ). In particolare, osserviamo che, durante l’oscillazione, i punti in cui si annulla il fattore sin(kn x) rimangono
fermi. Tali punti sono detti punti nodali e si ottengono risolvendo kn x = qπ con q ∈ Z e x ∈ (0, `).
Risulta perci`
o che l’n-esima armonica ha esattamente n − 1 punti nodali, dati da
x=
q`
,
n
q = 1, 2, . . . n − 1
(si veda la figura 1.1). Il fattore αn sin(ωn t + γn ) oscilla con frequenza
√
ωn nc n
σ
νn =
=
=
,
2π 2` 2` ρ
√
dove si `e usata la relazione c = σρ , in cui σ `e la tensione della corda e ρ la sua densit`a (lineare).
Dunque un corrisponde a un “suono” di frequenza νn , detto suono armonico. Il pi`
u basso dei
suoni armonici `e quello dell’armonica fondamentale u1 , che vibra con frequenza
√
1
σ
ν1 =
2` ρ
e che sostanzialmente determina l’altezza del suono prodotto dalla corda vibrante. Semplificando
un po’ le cose, possiamo dire che la sovrapposizione delle diverse armoniche che vanno a formare u
(ce ne sono infinite ma di fatto solo le prime unit`a, massimo decine, sono importanti) contribuiscono
a determinare il timbro del suono.4 Per quanto riguarda l’intensit`
a, questa `e legata all’energia della
4 In
realt`
a il timbro caratteristico di uno strumento dipende da molti altri fattori, come ad esempio l’attacco, il
rilascio e, pi`
u in generale, l’evoluzione temporale della forma d’onda. Teniamo sempre presente che il sistema (1.27)
`
e una descrizione molto semplificata della realt`
a (in particolare non prevede effetti dissipativi, per cui il suono si
estende indefinitamente nel tempo).
1.2. CORDA VIBRANTE CON ESTREMI FISSI
13
vibrazione:
1 `
2
2
(1.38)
∫ [ρut (x, t) + σux (x, t)] dx
2 0
in cui si distinguono una parte di energia cinetica e una parte di energia potenziale elastica. Ora,
poich´e
E(t) =
∞
ut (x, t) = ∑ ωn αn cos(ωn t + γn ) sin(kn x),
n=1
∞
ux (x, t) = ∑ kn αn sin(ωn t + γn ) cos(kn x),
n=1
possono essere interpretati come sviluppi in serie di Fourier di una funzione dispari e una pari su
[−`, `], per il teorema di Parseval reale (1.18) si ha
`
∫
0
`
∫
0
u2t (x, t) dx =
∞
`
1 ` 2
2
2
∫ ut (x, t) dx = ∑ (ωn αn ) cos (ωn t + γn ),
2 −`
2
n=1
u2x (x, t) dx =
∞
1 ` 2
`
2
2
∫ ux (x, t) dx = ∑ (kn αn ) sin (ωn t + γn ).
2 −`
n=1 2
Pertanto, ricordando che σ = c2 ρ, si ottiene
E(t) =
` u2 (x, t)
σ` ∞ 2 2
σ
σ` ∞
2
2
t
+ u2x (x, t)] dx =
∑ (kn αn ) =
∑ k (A + Bn ).
∫ [
2
2 0
c
4 n=1
4 n=1 n n
Osserviamo che E(t) = E(0) ∶= E per ogni t, e dunque si ha la conservazione dell’energia. Infine,
ricordando che An = ϕn e ωn Bn = ψn , dove ϕn e ψn sono i coefficienti di Fourier del prolungamento
dispari di ϕ e ψ a (−`, `), si pu`
o scrivere l’energia in funzione di tali coefficienti:
∞
∞
`
`ρ 2
(ρψn2 + σkn2 ϕ2n ) = ∑
(ψn + ωn2 ϕ2n ) .
4
4
n=1
n=1
E=∑
(1.39)
Esercizio 1.17 Utilizzando la conservazione dell’energia enunciare e dimostrare un risultato di
unicit`
a per la soluzione del problema della corda vibrante.
Osservazione 1.18 Il metodo della separazione delle variabili ci ha fatto individuare un insieme
di funzioni
Xn (x) = sin(kn x)
n = 1, 2, . . . ,
che:
1. formano una base dello spazio L2 [0, `] (come segue dal teorema (1.7) immaginando di
prolungare in modo dispari all’intervallo [−`, `] ogni funzione di L2 [0, `]);
2. “diagonalizzano” l’operatore derivata seconda con condizioni di Dirichlet nulle, in quanto
⎧
′′
2
⎪
⎪ Xn (x) = −kn Xn (x),
⎨
⎪
⎪
⎩ Xn (0) = Xn (`) = 0.
x ∈ (0, `),
Questa base sar`
a quindi adatta a risolvere ogni problema posto in [0, `], che dipenda dalla derivata
seconda spaziale della funzione incognita e che abbia condizioni di Dirichlet nulle. Supponiamo
ad esempio di voler risolvere il problema di diffusione del calore in una sbarretta di lunghezza `
mantenuta a temperatura costante agli estremi:
⎧
⎪
ut (x, t) = cuxx (x, t),
⎪
⎪
⎪
⎪
⎨ u(0, t) = u(`, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x),
x ∈ (0, `), t > 0,
t ≥ 0,
x ∈ (0, `)
(1.40)
14
CAPITOLO 1. SERIE DI FOURIER
(dove c `e una costante positiva). Sviluppando la funzione incognita e il dato iniziale nella base
Xn ,
∞
u(x, t) = ∑ Tn (t)Xn (x),
∞
ϕ(x) = ∑ ϕn Xn (x)
n=1
n=1
e sostituendo questa espressione nella (1.40) si ottiene un sistema di equazioni differenziali ordinarie
disaccoppiate per le funzioni incognite Tn ,
⎧
′
2
⎪
⎪ Tn (t) = −ckn Tn (t),
⎨
⎪
⎪
⎩ Tn (0) = ϕn ,
che ci d`
a la soluzione
t > 0,
∞
u(x, t) = ∑ ϕn sin(kn x) e−ckn t ,
2
n=1
dove, ovviamente,
2 `
∫ ϕ(x) sin(kn x) dx.
` 0
Altri esempi di questo tipo sono dati dagli Esercizi 4 e 5 nell’Appendice B.
ϕn =
1.3
Problema del “tamburo rettangolare”
Consideriamo una membrana elastica ideale di forma rettangolare, con lati di lunghezza a e b,
vincolata a rimanere fissa sul bordo. Posto
R = {(x, y) ∈ R2 ∣ 0 < x < a, 0 < y < b},
le vibrazioni di tale membrana (“tamburo rettangolare”) sono descritte dal seguente sistema:
⎧
utt (x, y, t) = c2 (uxx + uyy ) (x, y, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(x, y, t) = 0,
⎨
⎪
u(x, y, 0) = ϕ(x, y),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ ut (x, y, 0) = ψ(x, y),
(x, y) ∈ R, t > 0,
(x, y) ∈ ∂R, t ≥ 0,
(x, y) ∈ R,
(1.41)
(x, y) ∈ R,
dove ϕ e ψ sono opportuni dati iniziali. Risolviamo il problema per separazione di variabili, come
nell’esempio precedente. Se cerchiamo una soluzione della forma
u(x, y, t) = X(x)Y (y)T (t),
dalla prima delle (1.41) otteniamo
X(x)Y (y)T ′′ (t) = c2 [X ′′ (x)Y (y)T (t) + X(x)Y ′′ (y)T (t)]
e, analogamente al caso precedente, dividendo per c2 X(x)Y (y)T (t) si ottiene la condizione
T ′′ (t) X ′′ (x) Y ′′ (x)
=
+
= µ.
c2 T (t)
X(x)
Y (y)
′′
′′
(x)
(x)
con µ costante. Ancora, dall’uguaglianza XX(x)
= µ − YY (y)
deduciamo che dovr`a esistere un’altra
costante η per cui
X ′′ (x)
Y ′′ (x)
=µ−
= η.
X(x)
Y (y)
Osserviamo inoltre che la condizione al contorno risulter`a soddisfatta se
X(0) = X(a) = Y (0) = Y (b) = 0.
1.3. PROBLEMA DEL “TAMBURO RETTANGOLARE”
15
Ci troviamo perci`
o di fronte a una coppia di problemi di Sturm-Liouville:
⎧
′′
⎪
⎪ X (x) = ηX(x), x ∈ (0, a),
⎨
⎪
⎪
⎩ X(0) = X(a) = 0,
⎧
′′
⎪
⎪ Y (y) = γY (y), y ∈ (0, b),
⎨
⎪
⎪
⎩ Y (0) = Y (b) = 0,
(1.42)
dove γ = µ − η. Come abbiamo gi`
a visto nel risolvere il problema della corda vibrante, entrambi
questi problemi hanno una famiglia numerabile di soluzioni (coppie autofunzione-autovalore) date
da
mπ
a
a 2
a
Xm (x) = sin(km
x), ηm = −(km
) , km
=
, m = 1, 2, . . .
a
(1.43)
nπ
b
b 2
b
Yn (x) = sin(kn y), γn = −(kn ) , kn =
, n = 1, 2, . . .
b
Per ogni scelta di m e n si ha perci`
o
µ = µmn = ηm + γn = − [(
mπ 2
nπ 2
) +( ) ]
a
b
(1.44)
e la corrispondente equazione per T (t) `e
2
T ′′ (t) = −ωmn
T (t),
dove
√
(
ωmn = c
√
mπ 2
nπ 2
a )2 + (k b )2 .
) + ( ) = c (km
n
a
b
Tale equazione ha soluzione generale
Tmn (t) = A cos(ωmn t) + B sin(ωmn t),
con A e B costanti arbitrarie. Si `e perci`o trovata la soluzione a variabili separate
umn (x, y, t) = Xm (x)Yn (y)Tmn (t)
a
= [Amn cos(ωmn t) + Bmn sin(ωmn t)] sin(km
x) sin(knb y)
(1.45)
a
= αmn sin (ωmn t + γmn ) sin(km
x) sin(knb y),
con Amn , Bmn costanti arbitrarie e
αmn =
√
cos γmn = √
2 ,
A2mn + Bmn
Bmn
A2mn
2
+ Bmn
.
Sempre procedendo come nel caso della corda vibrante, cerchiamo la soluzione generale del problema (1.41) come somma di infinite “armoniche” umn :
∞
u(x, y, t) = ∑ umn (x, y, t).
(1.46)
m,n=1
Imponendo il dato iniziale otteniamo le condizioni
∞
a
b
∑ Amn sin(km x) sin(kn y) = ϕ(x, y),
m,n=1
∞
∑
m,n=1
(1.47)
a
x) sin(knb y)
ωmn Bmn sin(km
= ψ(x, y).
16
CAPITOLO 1. SERIE DI FOURIER
Per andare avanti occorre fare una piccola digressione sullo sviluppo in serie di Fourier di una
funzione di due variabili definita nel rettangolo [−a, a] × [−b, b]:
f (x, y),
−a ≤ x ≤ a,
−b ≤ y ≤ b.
Per ogni y fissata, la funzione f (x, y) (vista come funzione della sola x) pu`o essere sviluppata
(almeno formalmente) in serie di Fourier:
f (x, y) = ∑ fm (y) ei
mπ
a x
,
fm (y) =
m∈Z
a
1
−i mπ x
∫ f (x, y) e a dx.
2a −a
I coefficienti di Fourier fm (y), che sono ovviamente funzioni di y ∈ [−b, b], possono essere a loro
volta sviluppati in serie di Fourier:
fm (y) = ∑ fmn ei
nπ
b y
,
fmn =
n∈Z
b
1
−i nπ y
∫ fm (y) e a dy.
2b −b
In definitiva si ha perci`
o lo sviluppo di f in “serie di Fourier doppia”
a
b
f (x, y) = ∑ fmn ei(km x+kn y) ,
m,n∈Z
a
b
b
a
1
y)
x+kn
−i(km
dx dy.
fmn =
∫ ∫ f (x, y) e
4ab −a −b
(1.48)
a
dove, come precedentemente definito, km
= mπ
, knb = nπ
. Senza preoccuparci di scrivere un’ea
b
spressione generale per il caso reale, limitiamoci ad osservare che se f `e reale e dispari (cio`e
f (−x, y) = f (x, −y) = −f (x, y)) allora lo sviluppo (1.48) si pu`o scrivere
∞
a
f (x, y) = ∑ amn sin(km
x) sin(knb y)
m,n=1
a
b
1
a
b
∫ ∫ f (x, y) sin(km x) sin(kn y) dx dy
ab −a −b
a
b
4
a
b
=
∫ ∫ f (x, y) sin(km x) sin(kn y) dx dy.
ab 0 0
amn =
(1.49)
Tornando al nostro problema, se confrontiamo (1.47) con (1.49), possiamo riconoscere in (1.47) lo
sviluppo in serie di Fourier doppia dei prolungamenti dispari di ϕ e ψ al rettangolo [−a, a]×[−b, b].
Quindi le condizioni iniziali sono (formalmente) soddisfatte se le costanti arbitrarie Amn e ωmn Bmn
sono i coefficienti dello sviluppo in serie di Fourier doppia delle funzioni dispari ϕ e ψ, ovvero
Amn =
a
b
4
a
b
∫ ∫ ϕ(x, y) sin(km x) sin(kn y) dx dy.
ab 0 0
(1.50)
Bmn =
a
b
4
a
b
∫ ∫ ψ(x, y) sin(km x) sin(kn y) dx dy.
ωmn ab 0 0
(1.51)
1
Con tale scelta dei coefficienti Amn e Bmn , la (1.46) `e la soluzione formale del problema (1.41).
Naturalmente si possono dimostrare per questa soluzione risultati rigorosi analoghi al Teorema
1.15.
Per quanto riguarda l’interpretazione fisica, valgono considerazioni analoghe a quelle svolte per la
corda vibrante. Notiamo, in particolare, che le armoniche umn consistono in una modulazione, di
a
frequenza temporale ωmn /2π, del profilo sin(km
x) sin(knb y). In questo caso i punti che rimangono
a
fissi durante l’oscillazione (corrispondenti all’annullarsi del fattore sin(km
x) o del fattore sin(knb y))
1.4. SERIE DI FOURIER MULTIPLA E RETICOLI PERIODICI
17
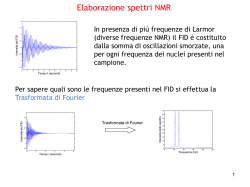
formano delle linee nodali parallele agli assi cartesiani. Per l’esattezza, l’armonica umn ha m − 1
linee nodali parallele all’asse y, di equazioni
x=
qa
,
m
q = 1, 2, . . . m − 1,
e n − 1 linee nodali parallele all’asse x, di equazioni
y=
qb
,
n
q = 1, 2, . . . n − 1,
(si veda la figura 1.2).
Figura 1.2: Rappresentazione dei profili spaziali di alcune armoniche del tamburo rettangolare (in questo
esempio b = a/2). Le tonalit`
a di grigio corrispondono a diverse altezze della membrana e sono evidenziate
le linee nodali.
1.4
Serie di Fourier multipla e reticoli periodici
Nell’esempio precedente abbiamo incontrato la serie di Fourier doppia (1.48) per una funzione
periodica rispetto a entrambe le variabili. Il procedimento utilizzato per ricavarla ha un carattere
ricorsivo e si pu`
o estendere facilmente al caso di una funzione di N variabili, f ∶ RN → C che sia
18
CAPITOLO 1. SERIE DI FOURIER
periodica rispetto a ciascuna variabile. Supponendo che f sia 2`i -periodica rispetto alla variabile
xi , per i = 1, 2, . . . N , lo sviluppo in serie di Fourier multipla di f ha la seguente forma:
f (x) = ∑ fn eikn ⋅x ,
fn =
n∈ZN
1
−ikn ⋅x
dx
∫ f (x) e
∣C∣ C
dove
x = (x1 , x2 , . . . , xN ),
n = (n1 , n2 , . . . , nN )
kn = (
(1.52)
n1 π n2 π
nN π
,
,...,
),
`1
`2
`N
dove C `e il plurirettangolo
C = [−`1 , `1 ] × [−`2 , `2 ] × ⋯[−`N , `N ],
detto cella fondamentale, e dove abbiamo indicato con ∣C∣ la misura (volume N -dimensionale) di
C. A causa della periodicit`
a, una qualunque altra regione di RN ottenuta per traslazione di C
pu`
o essere usata come cella fondamentale (esattamente come, nel caso unidimensionale, si pu`o
prendere come “periodo” rappresentativo di una funzione periodica un qualunque intervallo di
ampiezza pari al periodo. Per la serie di Fourier multipla valgono risultati di convergenza analoghi
a quelli dimostrati per il caso unidimensionale.
A dimensione N ≥ 2, in realt`
a, il concetto di “periodicit`a” `e pi`
u vasto di quello “rispetto a
ciascuna variabile” che abbiamo finora discusso. Geometricamente parlando, la periodicit`a di f
rispetto a ciascuna variabile corrisponde all’invarianza di f (x) per traslazioni di x (di multipli
interi dei periodi 2`i ) lungo le N direzioni coordinate ortogonali. Tuttavia `e evidente che si
possono considerare, pi`
u in generale, funzioni che sono invarianti per traslazioni lungo N direzioni
non ortogonali. Questa osservazione pu`o essere formalizzata tramite le seguenti definizioni.
Definizione 1.19 Sia {a1 , a2 , . . . , aN } una base di RN . Il reticolo periodico generato da a1 , . . . , aN
`e
L = {n1 a1 + n2 a2 + ⋯nN aN ∣ (n1 , . . . , nN ) ∈ ZN } .
La cella fondamentale di L `e
C = {t1 a1 + t2 a2 + ⋯tN aN ∶ ∣ (t1 , . . . , tN ) ∈ [0, 1]N } .
Riguardando i generatori del reticolo come vettori-colonna,
⎛ a1i ⎞
⎟
ai = ⎜
⎜ ⋮ ⎟
⎝aN i ⎠
associamo al reticolo L la matrice N × N
⎛ a11
A=⎜
⎜ ⋮
⎝aN 1
⋯
⋯
a1N ⎞
⋮ ⎟
⎟,
aN N ⎠
che ha per colonne le componenti dei generatori. In questo modo, le precedenti definizioni si
possono riscrivere in maniera compatta come
L = {An ∣ n ∈ ZN }
(1.53)
C = {At ∣ t ∈ [0, 1]N } .
(1.54)
∣C∣ = ∣det A∣.
(1.55)
e
Notiamo anche che
1.4. SERIE DI FOURIER MULTIPLA E RETICOLI PERIODICI
19
Definizione 1.20 Una funzione f ∶ RN → C si dice L-periodica se f (x + λ) = f (x), per ogni
x ∈ RN e per ogni λ ∈ L.
Dunque una funzione `e L-periodica se `e invariante per tutte le traslazioni corrispondenti ai vettori
di L. Il reticolo periodico, infatti, pi`
u che un insieme di punti, va perci`o visto come un insieme di
N
traslazioni di R . Il caso particolare di funzioni che sono periodiche rispetto a ciascuna variabile,
`e quello in cui le traslazioni invarianti sono parallele agli assi coordinati ovvero, in altre parole,
corrisponde a generatori paralleli agli assi coordinati.
Notiamo che una funzione L-periodica `e completamente determinata dai valori che assume in una
cella fondamentale: i valori di f fuori da essa si ottengono “tassellando” lo spazio con copie di C
(traslate con i vettori di L). La scelta della cella fondamentale `e ovviamente arbitraria fra tutte la
possibili traslazioni (di vettore arbitrario) della C definita dalla (1.54). Una scelta molto comune
`e la cella fondamentale “centrata”
C = {At ∣ t ∈ [− 21 , 21 ]N } .
In vista del nostro scopo, che `e quello di scrivere una serie di Fourier per una funzione L-periodica,
la seguente definizione `e di centrale importanza.
Definizione 1.21 Sia L un reticolo periodico con generatori a1 , . . . , aN . Il reticolo reciproco di
L `e il reticolo periodico L∗ con generatori a∗1 , . . . , a∗N definiti implicitamente dalle relazioni
a∗i ⋅ aj = 2πδij ,
1 ≤ i, j ≤ N.
(1.56)
Se A `e la matrice associata ai vettori a1 , . . . , aN e A∗ `e la matrice associata ai vettori a∗1 , . . . , a∗N ,
notiamo che le relazioni (1.56) si possono esprimere come
AT∗ A = 2πI
ovvero, essendo A invertibile, AT∗ = 2πA−1 o ancora
A∗ = 2πA−T
(1.57)
(dove A−T ∶= (A−1 )T = (AT )−1 ). La (1.57) ci fornisce esplicitamente le componenti dei generatori
del reticolo reciproco L∗ in funzione delle componenti dei generatori di L.
Vediamo adesso che una funzione L-periodica ammette uno sviluppo di tipo serie di Fourier. L’idea
`e quella di operare una trasformazione lineare di RN che ci riporta al caso dei generatori ortogonali
in cui, come abbiamo osservato, si ha lo sviluppo (1.52). Se f ∶ RN → C `e L-periodica, definiamo
quindi la funzione
g(y) = f (Ay).
Per ogni n ∈ ZN si ha
g(y + n) = f (Ay + An) = f (Ay) = g(y)
(in quanto An ∈ L e f `e L-periodica) e dunque g `e 1-periodica in ciascuna variabile. Possiamo
allora sviluppare g in serie di Fourier multipla secondo la (1.52), con kn = 2π(n1 , . . . , nN ) = 2πn:
g(y) = ∑ gn e2πin⋅y ,
n∈ZN
gn = ∫
[0,1]N
g(y) e−2πin⋅y dy,
dove si `e usato il fatto che il volume di [0, 1]N `e uguale a 1. Perci`o:
f (x) = g(A−1 x) = ∑ gn e2πin⋅A
n∈ZN
−1
x
−T
= ∑ gn e2πiA
n∈ZN
n⋅x
20
CAPITOLO 1. SERIE DI FOURIER
eγ⋅x ,
= ∑ gn eiA∗ n⋅x = ∑ gA−1
∗ γ
γ∈L∗
n∈ZN
dove si `e usata la (1.57) e, nell’ultimo passaggio, si `e effettuato il cambio di indice di sommatoria
γ = A∗ n. D’altra parte si ha
=∫
gA−1
∗ γ
=∫
[0,1]N
−1
[0,1]N
g(y) e−2πiA∗
g(y) e−iγ⋅Ay dy =
γ⋅y
dy = ∫
−T
[0,1]N
g(y) e−2πiγ⋅A∗ y dy
1
g(A−1 x) e−iγ⋅x dx,
∫
∣det A∣ A[0,1]N
1
dove si `e utilizzata l’identit`
a A−T
∗ = 2π A (che segue facilmente dalla (1.57)) e, nell’ultimo passaggio,
si`e effettuato il cambio di variabile di integrazione x = Ay. Utilizzando poi (1.54) e (1.55) si ottiene
gA−1
=
∗ γ
1
−iγ⋅x
dx.
∫ f (x) e
∣C∣ C
In definitiva abbiamo ricavato lo sviluppo in serie di Fourier (formale) di una funzione L-periodica:
f (x) = ∑ fγ eiγ⋅x ,
γ∈L∗
fγ =
1
−iγ⋅x
dx.
∫ f (x) e
∣C∣ C
(1.58)
Notiamo quindi l’importanza del concetto di reticolo reciproco: L∗ `e l’insieme delle frequenze dello
sviluppo in serie di Fourier di una funzione L-periodica.
Nel caso particolare di funzioni periodiche rispetto ciascuna variabile, ponendo uguale a 2`i il
periodo della variabile xi , le matrici A e A∗ risultano diagonali,
⎛2`1
A=⎜
⎜
⎝ 0
⋱
0 ⎞
⎟,
⎟
2`N ⎠
π
⎛ `1
A∗ = ⎜
⎜
⎝0
⋱
0⎞
⎟,
⎟
π
⎠
`
N
e si ritrova lo sviluppo (1.52).
La teoria dei reticoli periodici e lo sviluppo in serie (1.58) sono di grande importanza in cristallografia e in fisica dello stato solido.
Capitolo 2
Problemi di Sturm-Liouville e
funzioni speciali
2.1
Problema del tamburo circolare
Consideriamo il problema di studiare le oscillazioni di una membrana elastica di forma circolare
vincolata a rimanere fissa sul bordo, studiamo cio`e il problema del “tamburo circolare” di raggio
r. Posto
D = {(x, y) ∈ R2 ∣ x2 + y 2 < r2 },
il problema differenziale da risolvere, analogo al problema (1.41) ma in una diversa geometria, `e
⎧
utt (x, y, t) = c2 (uxx + uyy ) (x, y, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(x, y, t) = 0,
⎨
⎪
u(x, y, 0) = ϕ(x, y),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ ut (x, y, 0) = ψ(x, y),
(x, y) ∈ D, t > 0,
(x, y) ∈ ∂D, t ≥ 0,
(x, y) ∈ D,
(2.1)
(x, y) ∈ D,
dove ϕ e ψ sono i dati iniziali. La tecnica di separazione delle variabili, rispetto alle variabili x e y,
risulta problematica perch´e la condizione al bordo `e, per cos`ı dire, “non fattorizzabile”. Possiamo
per`
o provare a usare la separazione di variabili rispetto alle coordinate polari
⎧
⎪
⎪ x = ρ cos θ,
⎨
⎪
⎪
⎩ y = ρ sin θ,
ρ > 0,
0 ≤ θ < 2π,
in cui la condizione al bordo si esprimer`a tramite la sola ρ. Posto f˜(ρ, θ) = f (ρ cos θ, ρ sin θ) e
ricordando l’epressione dell’operatore Laplaciano in coordinate polari, il problema si trasforma in
⎧
1
1
⎪
⎪
˜ρ + 2 u
˜θθ )(ρ, θ, t),
u
˜tt (ρ, θ, t) = c2 (˜
uρρ + u
⎪
⎪
⎪
ρ
ρ
⎪
⎪
⎪
⎪
⎪
⎪
˜(r, θ, t) = 0,
⎪u
⎨
⎪
⎪
⎪
u
˜(ρ, θ, 0) = ϕ(ρ,
˜ θ),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
˜ θ),
⎪
˜t (ρ, θ, 0) = ψ(ρ,
⎩u
0 < ρ < r, 0 < θ < 2π, t > 0,
0 ≤ θ < 2π, t ≥ 0,
(2.2)
0 < ρ ≤ r, 0 ≤ θ < 2π,
0 < ρ ≤ r, 0 ≤ θ < 2π,
Come negli esempi visti nel capitolo precedente, cerchiamo una soluzione a variabili separate:
u
˜(ρ, θ, t) = R(ρ)H(θ)T (t),
21
22
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
da cui (omettendo l’indicazione delle variabili indipendenti) la condizione
RHT ′′ = c2 (R′′ HT +
1 ′
1
R HT + 2 RH ′′ T ) .
ρ
ρ
Dividendo per c2 RHT e separando il termine che dipende solo da t si ottiene
T ′′
R′′ R′
H ′′
=
+
+
= −µ.
c2 T
R
ρR ρ2 H
(2.3)
con µ costante (il segno meno `e per la successiva convenienza di scrittura). Moltiplicando per ρ2
e separando il termine che dipende solo da θ si ottiene altres`ı
H ′′
ρ2 R′′ ρR′
+
+ ρ2 µ = −
= ν,
R
R
H
dove ν `e un’altra costante. Tenuto conto che la condizione al bordo del disco `e soddisfatta se
R(r) = 0 e che la variabile θ `e da considerarsi periodica, siamo condotti alla coppia di problemi di
tipo Sturm-Liouville
⎧
′′
⎪
⎪ H = −νH,
⎨
⎪
⎪
⎩ H(θ) = H(θ + 2π),
⎧
2 ′′
′
2
⎪
⎪ ρ R + ρR + (ρ µ − ν)R = 0,
⎨
⎪
⎪
⎩ R(r) = 0.
(2.4)
Occupiamoci per prima del problema per H. La soluzione generica dell’equazione H ′′ = −νH `e
√
H(θ) = aeλθ + be−λθ ,
λ = −ν,
con a e b costanti arbitrarie. Posto λ = α + iβ, con α, β ∈ R si vede che la soluzione pu`o essere
periodica solo se α = 0. Con α = 0 si ha una soluzione di periodo 2π/∣β∣. Pertanto, se vogliamo
che la soluzione sia 2π-periodica, bisogna che β sia un numero intero e dunque λ = λm = im, con
m ∈ Z. Si ha quindi la famiglia di coppie autofunzione-autovalore
Hm (θ) = eimθ ,
νm = −λ2m = m2 ,
m∈Z
(2.5)
(che corrisponde alla base di Fourier analizzata nel precedente capitolo). Fissato dunque ν = νm =
m2 , studiamo il problema per R
⎧
2 ′′
′
2
2
⎪
⎪ ρ R + ρR + (ρ µ − m )R = 0,
⎨
⎪
⎪
⎩ R(r) = 0.
Conviene cambiare variabile, ponendo
√
ξ = µ ρ,
√
g(ξ) = R (ξ/ µ) ,
e definire N ∶= ∣m∣. Si ottiene cos`ı la seguente equazione differenziale per g
ξ 2 g ′′ (ξ) + ξ g ′ (ξ) + (ξ 2 − N 2 ) g(ξ) = 0,
(2.6)
detta equazione di Bessel di ordine N . Proviamo a risolvere l’equazione di Bessel per serie:
k
ponendo g(ξ) = ∑∞
k=0 ck ξ si ha
∞
∞
∞
∞
k=2
k=1
k=2
k=0
k
k
k
2
k
∑ k(k − 1)ck ξ + ∑ kck ξ + ∑ ck−2 ξ − N ∑ ck ξ = 0
per cui, uguagliando i coefficienti delle uguali potenze di ξ, si ottengono le relazioni ricorsive
⎧
⎪
N 2 c0 = 0,
⎪
⎪
⎪
⎪
⎨ (1 − N 2 )c1 = 0,
⎪
⎪
⎪
2
2
⎪
⎪
⎩ (k − N )ck + ck−2 = 0,
k ≥ 2.
2.1. PROBLEMA DEL TAMBURO CIRCOLARE
23
Notiamo che i ck sono tutti nulli fino a k = N − 1 (infatti solo per k = N l’equazione ricorsiva `e
compatibile con ck =/ 0) e dunque
c0 = c1 = ⋯ = cN −1 = 0.
Conviene quindi definire
aj ∶= cN +j ,
j = 0, 1, 2, . . .
per cui a0 non `e necessariamente nullo e la serie di potenze di g diventa
∞
g(ξ) = ξ N ∑ aj ξ j .
j=0
Inoltre, (k 2 − N 2 )ck + ck−2 scritta per k = N + j, con j ≥ 0, diventa
[(N + j)2 − N 2 ]cN +j + cN +j−2 = 0,
e dunque
• per j = 0 si ottiene 0 a0 = 0, perci`o a0 `e arbitrario;
• per j = 1 si ottiene (1 + 2N )a1 = 0, perci`o a1 = 0;
• per j ≥ 2 si ottiene la formula ricorsiva
aj = −
aj−2
.
j (j + 2N )
Osserviamo che gli aj con j dispari sono tutti nulli: a1 = a3 = a5 = ⋯ = 0. Posto j = 2k, si ha
a2k = −
a2(k−1)
,
4k (k + N )
da cui
a2k = (−1)k
4k
a0 N !
.
k! (k + N )!
e, scegliendo
a0 =
otteniamo
a2k =
Si ha cos`ı
1
,
N!
2N
(−1)k
.
22k+N k! (k + N )!
∞
(−1)k
ξ 2k+N
( )
=∶ JN (ξ).
k=0 k! (k + N )! 2
g(ξ) = ∑
(2.7)
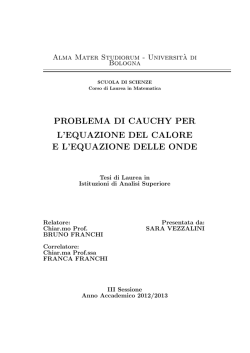
Notiamo che la serie di potenze converge su tutto R a una funzione analitica JN detta funzione di
Bessel di prima specie di ordine N .
Torniamo quindi alla funzione radiale R. Abbiamo trovato che
√
√
R(ρ) = g( µ ρ) = J∣m∣ ( µ ρ)
ma dobbiamo ancora imporre la condizione R(r) = 0. Risulta che JN , ha una successione infinita
di zeri che numeriamo a partire dal primo zero strettamente positivo1
0 < ξ0N < ξ1N < ξ2N < . . .
24
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
1
N=0
N=1
N=2
0.5
0
−0.5
0
2
4
6
8
10
12
14
16
Figura 2.1: Plot delle prime tre funzioni di Bessel, J0 , J1 e J2 .
(vedi figura 2.1). Dunque la condizione R(r) = 0 `e soddisfatta se e solo se
2
µ = kmn
,
kmn ∶=
√
∣m∣
µ r = ξn , ovvero
∣m∣
ξn
,
r
per un certo n = 0, 1, 2, . . .. Abbiamo dunque trovato la famiglia di coppie autovalore-autofunzione
2
µmn = kmn
,
Rmn (ρ) = J∣m∣ (kmn ρ),
m ∈ Z,
n = 0, 1, 2, . . .
(2.8)
Fissati m ed n, dalla (2.3) si ottiene l’equazione per T (t)
2
T ′′ = −c2 kmn
T
che ha soluzione generica Tmn (t) = A cos(ωmn t) + B sin(ωmn t), con A e B costanti complesse, dove
si `e posto
∣m∣
c ξn
ωmn = ckmn =
.
r
Cos`ı, analogamente al caso della corda vibrante e del tamburo rettangolare, abbiamo trovato le
soluzioni a variabili separate, ovvero le armoniche, del tamburo circolare,
u
˜mn (ρ, θ, t) = [Amn cos(ωmn t) + Bmn sin(ωmn t)] Wmn (ρ, θ).
dove si `e posto
Wmn (ρ, θ) ∶= J∣m∣ (kmn ρ)eimθ ,
(2.9)
che chiameremo funzioni cilindriche. Cerchiamo la soluzione del problema (2.1) come somma di
infinite armoniche,
∞
u
˜(ρ, θ, t) = ∑ ∑ [Amn cos(ωmn t) + Bmn sin(ωmn t)] Wmn (ρ, θ),
m∈Z n=0
1 Per
N ≥ 1 c’`
e sempre uno zero anche nell’origine, che non contiamo.
(2.10)
2.1. PROBLEMA DEL TAMBURO CIRCOLARE
25
per cui le condizioni iniziali diventano
∞
˜ θ),
∑ ∑ Amn Wmn (ρ, θ) = ϕ(ρ,
m∈Z n=0
(2.11)
∞
˜ θ).
∑ ∑ ωmn Bmn Wmn (ρ, θ) = ψ(ρ,
m∈Z n=0
Si presenta quindi l’esigenza di sviluppare funzioni definite su (ρ, θ) ∈ (0, r) × (0, 2π) in una serie
di funzioni cilindriche. Si pu`
o dimostrare che vale la propriet`a di ortogonalit`a
2π
∫
r
∫
0
0
Wmn (ρ, θ)W m′ n′ (ρ, θ) ρ dρ dθ = C(∣m∣, n)δmm′ δnn′ ,
(2.12)
dove la costante di normalizzazione risulta essere
2
′
(ξnN )] .
C(N, n) = πr2 [JN
(2.13)
Pertanto lo sviluppo (formale) in serie di funzioni cilindriche `e cos`ı fatto:
∞
f (ρ, θ) = ∑ ∑ fmn Wmn (ρ, θ),
m∈Z n=0
2π
r
1
fmn =
∫
∫ f (ρ, θ) W mn (ρ, θ) ρ dρ dθ.
C(∣m∣, n) 0
0
(2.14)
Per questo tipo di sviluppo valgono risultati analoghi a quelli visti per le serie di Fourier (si veda
[6] e pi`
u avanti in questo capitolo).
Osservazione 2.1 Lo sviluppo (2.14) `e uno sviluppo complesso. Analogamente a quanto fatto
per le serie di Fourier, se f `e una funzione a valori reali, si pu`o scrivere lo sviluppo di f in serie
di funzioni cilindriche reali. Si lascia al lettore per esercizio la verifica che tale sviluppo ha la
seguente forma:
∞
∞
f (ρ, θ) = ∑ ∑ amn [f ] cos(mθ)Jm (kmn ρ) + bmn [f ] sin(mθ)Jm (kmn ρ)
m=0 n=0
⎧
⎪
se m = 0,
⎪f0n ,
amn [f ] = ⎨
⎪
⎪
⎩2 Re fmn , se m ≥ 1,
(2.15)
bmn [f ] = −2 Im fmn .
Dunque, le condizioni iniziali (2.11) fissano le costanti Amn Bmn che, con le notazioni appena
introdotte, sono date da
1 ˜
Amn = ϕ˜mn ,
Bmn =
ψmn .
ωmn
Pertanto, sostituendo i due sviluppi complessi nella (2.10) con i corrispondenti sviluppi reali, si
ottiene la formula finale per la soluzione:
∞
u
˜(ρ, θ, t) = ∑ cos(ωmn t) [amn [ϕ]
˜ cos(mθ) + bmn [ϕ]
˜ sin(mθ)] Jm (kmn ρ)
m,n=0
∞
sin(ωmn t)
˜ cos(mθ) + bmn [ψ]
˜ sin(mθ)] Jm (kmn ρ)
[amn [ψ]
+ ∑
ωmn
m,n=0
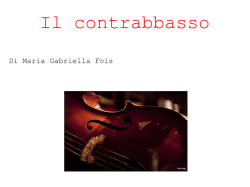
(2.16)
Notiamo che la soluzione si scompone in una sovrapposizione di onde stazionare il cui profilo
spaziale `e dato dalle funzioni cilindriche reali
cos(mθ) Jm (kmn ρ),
sin(mθ) Jm (kmn ρ),
m, n = 0, 1, 2, . . .
26
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
Figura 2.2: Alcune funzioni cilindiriche reali di tipo cos(mθ) Jm (kmn ρ). Le corrispondenti funzioni di
π
tipo sin(mθ) Jm (kmn ρ) si ottengono semplicemente con una rotazione di 2m
attorno al’asse del disco.
L’interpretazione dei grafici `e la stessa della figura 1.2. Notare le linee nodali radiali e quelle angolari.
Osserviamo che (per entrambi i tipi di funzione) si hanno esattamente m nodi angolari (contando
una sola volta quelli a distanza di π), che per m =/ 0 sono dati da
θ=
qπ
(per il seno),
m
θ=
e n nodi radiali
ρ=
qπ
π
+
(per il coseno),
m 2m
ξqn
kmn
,
q = 0, 1, . . . , m − 1,
q = 0, 1, . . . , n − 1
(vedi figura 2.2).
2.2
Una classe di problemi di Sturm-Liouville
Come abbiamo visto dagli esempi fin qui considerati, il metodo di separazione delle variabili per la
soluzione di equazioni alle derivate parziali conduce spesso a un problema differenziale, alle derivate
ordinarie, del seguente tipo (detto problema di Sturm-Liouville): determinare u ∶ [a, b] → C e µ ∈ C
che soddisfino
⎧
d
d
1
⎪
⎪
[ (p(x) u(x)) − q(x)u(x)] + µu(x) = 0,
a < x < b,
⎪
⎪
⎪ w(x) dx
dx
⎨
(2.17)
⎪
⎪
⎪
⎪
⎪
⎩ + opportune condizioni lineari su u in x = a e x = b,
dove w, p e q sono funzioni assegnate. Se esistono una costante µ ∈ C e una funzione u non identicamente nulla per cui vale la (2.17), si dice allora che u `e un’autofunzione relativa all’autovalore µ. Il
2.2. UNA CLASSE DI PROBLEMI DI STURM-LIOUVILLE
27
motivo di tale terminologia deriva dal fatto che l’eq. (2.17) si pu`o riscrivere, almeno formalmente,
⎧
⎪
⎪ Au = µu,
⎨
⎪
⎪
⎩ u ∈ D(A),
dove A `e l’operatore di Sturm-Liouville
A=
1
d
d
[− (p(x) ) + q(x)]
w(x) dx
dx
e D(A) `e il suo dominio
D(A) = {u appartiene a un opportuno spazio lineare e soddisfa le condizioni in a e b} ,
ed `e dunque `e interpretabile come problema agli autovalori per l’operatore lineare A.
Ci sono diverse categorie di problemi di questo tipo, a seconda delle varie ipotesi sulle funzioni w,
p q e sulle condizioni al contorno. Un risultato piutosto generale (che ci limitiamo ad enunciare,
senza dimostrazione) `e il seguente.
Teorema 2.2 Supponiamo p, p′ , q, w reali e continue in [a, b], con p > 0 e w > 0 in (a, b), e
consideriamo il problema (2.17) con le seguenti condizioni negli estremi:
′
⎧
⎪
⎪ α1 u(a) + α2 u (a) = 0, se p(a) =/ 0,
⎨
⎪
lim u(x) < ∞,
se p(a) = 0,
⎪
⎩ x→a+
′
⎧
⎪
⎪ β1 u(b) + β2 u (b) = 0, se p(b) =/ 0,
⎨
⎪
se p(b) = 0,
lim u(x) < ∞,
⎪
⎩ x→b−
(2.18)
dove α1 , α2 , β1 , β2 sono costanti reali tali che (α1 , α2 ) =/ (0, 0) e (β1 , β2 ) =/ (0, 0). Allora si ha:
(i) il problema di Sturm-Liouville (2.17) con le condizioni al contorno (2.18) ha un’infinit`
a
numerabile di soluzioni regolari {(un , µn ) ∣ n = 0, 1, 2, . . .};
(ii) gli autovalori µn sono reali, distinti e formano una successione crescente µ0 < µ1 < µ2 < ⋯
tendente a +∞;
(iii) le autofunzioni un formano una base ortogonale (che si pu`
o sempre supporre ortonormale) dello spazio di Hilbert (complesso) L2 ((a, b), w(x)dx), pertanto, se f appartiene a tale
spazio, la serie
∞
∑ fn un (x),
n=0
fn = ∫
b
a
f (x) un (x) w(x) dx
(2.19)
converge a f in L2 ((a, b), w(x)dx);
(iv) l’autofunzione un (n = 0, 1, 2, . . .) `e reale e ha esattamente n zeri isolati contenuti nell’intervallo (a, b);
(v) se f `e continua e regolare a tratti, e inoltre soddisfa le condizioni al contorno (2.18), allora
la serie (2.19) converge assolutamente e uniformemente a f .
La dimostrazione di questo teorema si pu`o trovare in [6] e [14]. Cerchiamo comunque di capire in
maniera intuitiva il significato di questi risultati e della particolare forma dell’operatore di SturmLiouville A. Riguardiamo A come operatore lineare su un opportuno sottospazio D(A) dello spazio
di Hilbert X = L2 ((a, b), w(x)dx):
D(A) = {u ∈ X ∣ u′′ ∈ X e u soddisfa le c.c. (2.18) } .
28
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
Ricordando che il prodotto hermitiano in X `e dato da
⟨u, v⟩ = ∫
b
u(x) v(x) w(x) dx,
a
possiamo scrivere, sfruttando ripetutamente l’integrazione per parti,
⟨Au, v⟩ = ∫
b
a
b
b
[−(pu′ )′ v + quv] dx = −pu′ v∣ + ∫
a
b
b
a
a
= −pu′ v∣ + puv ′ ∣ + ∫
a
b
a
[pu′ v ′ + quv] dx
[−u(pv ′ )′ + quv] dx.
Ma, per ipotesi, u e v stanno entrambe in D(A) e dunque entrambe soddisfano le condizioni agli
b
estremi (2.18) (con le stesse costanti αi e βi ), le quali fanno s`ı che il termine di bordo p(uv ′ −u′ v)∣a
si annulla sia in a che in b.2 Si ha perci`o
⟨Au, v⟩ = ∫
b
a
[−u(pv ′ )′ + quv] dx = ∫
b
a
[−u(pv)′ + uqv] dx = ⟨u, Av⟩
La relazione ⟨Au, v⟩ = ⟨u, Av⟩ appena trovata ci dice che A `e un operatore hermitiano, in analogia
con le matrici hermitiane del caso a dimensione finita. Dunque, i precedenti enunciati (i), (ii) e
(iii) ci dicono che vale un risultato analogo al teorema spettrale a dimensione finita: l’operatore
hermitiano A ammette una base ortonormale formata da autovettori con autovalori reali.
Osservazione 2.3 Le condizioni al contorno “miste” in (2.18) hanno come caso particolare le
condizioni di Dirichlet omogenee (caso α2 = β2 = 0) e quelle di Neumann omogenee (caso α1 = β1 =
0). Per questi casi valgono propriet`
a supplementari ad esempio la seguente:
µ0 ≥ ω ∶= inf
x∈(a,b)
q(x)
.
w(x)
(2.20)
Infatti, per condizioni di Neumann o di Dirichlet, una singola integrazione per parti ci permette
di scrivere
⟨Au, u⟩ = ∫
b
a
(pu′ u′ + quu) dx = ∫
b
a
(p∣u′ ∣ + q ∣u∣ ) dx ≥ qω ∫
2
b
2
a
2
∣u∣ w dx
e quindi se u = un `e un’autofunzione si ha
2
2
⟨Aun , un ⟩ = µn ∥un ∥ ≥ ω∥un ∥ ,
da cui segue la (2.20). Notiamo, in particolare, che se q ≥ 0 gli autovalori sono non-negativi e vale
la propriet`
a ⟨Au, u⟩ ≥ 0, per cui A `e quello che si chiama un operatore semidefinito positivo.
Osservazione 2.4 Il Teorema 2.2 pu`o essere esteso in vari modi affinch´e tutte o alcune delle
conclusioni (i)-(v) continuino a valere sotto condizioni pi`
u generali.
Ad esempio, almeno per condizioni di Dirichlet, l’ipotesi che q sia continua fino agli estremi
dell’intervallo [a, b] pu`
o essere sostituita con l’ipotesi pi`
u debole che (x − a)q(x) e (b − x)q(x) siano
funzioni continue su [a, b] (vedi [6]).
Le condizioni miste agli estremi possono essere sostituite con condizioni periodiche. In questo caso
l’unicit`
a dell’autovalore per ogni autofunzione non `e pi`
u garantita. (ne abbiamo visto un esempio
2 In un estremo nel quale il problema `
e singolare bisognerebbe dimostrare che anche u′ e v ′ restano limitate,
cosicch´
e l’annullarsi di p al bordo implichi l’annularsi di tutto il prodotto p(uv ′ − u′ v). Si pu`
o dimostrare, in effetti,
che la condizione u′′ ∈ X implica che u′ `
e continua, e quindi limitata, su [a, b] (stessa cosa per v).
2.2. UNA CLASSE DI PROBLEMI DI STURM-LIOUVILLE
29
risolvendo il primo dei problemi (2.4): allo stesso autovalore m2 corrispondono due autofunzioni, eimθ e e−imθ e di conseguenza ci sono una successione “ascendente” e una “discendente” di
autofunzioni);
Inoltre l’intervallo [a, b] pu`
o essere illimitato da una o da entrambe le parti (in altre parole,
possiamo considerare −∞ ≤ a < b ≤ +∞). In questo caso si deve richiedere
√
lim w(x) u(x) = 0
∣x∣→∞
(e inoltre ci vogliono opportune ipotesi sul comportamento di q all’infinito).
Infine si possono considerare problemi di Sturm-Liouville in cui le funzioni p, q e w non sono
regolari ma soddisfano solamente ipotesi di integrabilit`a.
Per queste e altre estensioni si pu`
o consultare la dettagliata monografia [16].
Vediamo ora alcuni esempi di particolare interesse.
Esempio 2.5 Consideriamo il problema di S-L gi`a incontrato nel risolvere il problema della corda
vibrante con estremi fissi:3
⎧
d2
⎪
⎪
⎪
0<x<`
⎪ dx2 u(x) + µu(x) = 0,
(2.21)
⎨
⎪
⎪
⎪
⎪
u(0)
=
u(`)
=
0.
⎩
Si ha in questo caso a = 0, b = `, w ≡ 1, p ≡ 1, q ≡ 0. Le soluzioni sono
un (x) = sin
nπx
,
`
µn = (
nπ 2
) ,
`
n = 1, 2, . . .
Esempio 2.6 Consideriamo il problema di S-L incontrato nel risolvere il problema del tamburo
circolare:4
⎧
ν2
1 d
d2
⎪
⎪
⎪
u(x)
−
u(x)
+
u(x) + µu(x) = 0,
0 < x < r,
⎪ dx2
x dx
x2
(2.22)
⎨
⎪
⎪
⎪
⎪
⎩ u(0) < ∞, u(r) = 0
(ν `e un intero non-negativo fissato). Si ha in questo caso a = 0, b = r, w(x) = x, p(x) = x, q(x) =
Le soluzioni sono:
un (x) = Jν (
ξnν x
),
r
µn = (
ξnν 2
) ,
r
ν2
.
x
n = 0, 1, 2, . . .
dove Jν `e la funzione di Bessel di prima specie di ordine ν e ξnν sono i suoi zeri positivi.
Pi`
u in generale, l’equazione differenziale di Bessel
d2
1 d
ν2
u(x)
+
u(x)
−
u(x) + µu(x) = 0
dx2
x dx
x2
ammette una soluzione generica del tipo
u(x) = αJν (x) + βNν (x)
dove α e β sono costanti arbitrarie e Nν `e la cosiddetta funzione di Neumann (o funzione di
Bessel di seconda specie) di ordine ν. Le funzioni di Neumann sono singolari in x = 0 ed `e per
questo che il problema (2.22) ha soluzioni solo del tipo Jν (cio`e con β = 0). Soluzioni del tipo
u(x) = αJν (x) + βNν (x) si incontrano risolvendo il problema “regolare” dato dall’equazione di
Bessel su un intervallo [rmin , rmax ] con rmin > 0.
3 Stavolta
per`
o adottiamo la convenzione opposta sul segno di µ in modo da essere aderenti alla forma generale
(2.17) dei problemi di Sturm-Liouville.
4 Osserviamo che, cercando una soluzione in serie di potenze, avevamo implicitamente imposto la condizione di
finitezza in x = 0.
30
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
Esempio 2.7 Consideriamo ora il problema di S-L:
⎧
d
m2
1 d
⎪
⎪
u(θ) + µu(θ) = 0,
⎪
⎪ sin θ dθ (sin θ dθ ) u(θ) −
sin2 θ
⎨
⎪
⎪
⎪
⎪
⎩ u(0) < ∞, u(π) < ∞
0 < θ < π,
(2.23)
(m ≥ 0 `e un qualunque intero non-negativo fissato). Si ha in questo caso a = 0, b = π, w(θ) = sin θ,
m2
. Le soluzioni sono:
p(θ) = sin θ, q(θ) = sin
θ
u` (θ) = P`m (cos θ),
µm
` = `(` + 1),
` = m, m + 1, m + 2, . . .
dove le funzioni P`m (x) sono definite da:
P`m (x) = (1 − x2 )m/2
dm
P` (x)
dxm
e le funzioni P` (x) ≡ P`0 (x) sono definite da:
P` (x) =
1 d` 2
(x − 1)` ,
2` `! dx`
cosicch´e risulta
(1 − x2 )m/2 dm+` 2
(x − 1)` .
(2.24)
2` `!
dxm+`
Le funzioni P` (x) si chiamano polinomi di Legendre mentre le P`m (x) sono le funzioni di
Legendre associate. Queste soddisfano la seguente relazione di ortogonalit`a
P`m (x) =
1
∫
−1
P`m (x) P`m
′ (x) dx =
2 (` + m)!
δ``′ ,
2` + 1 (` − m)!
`, `′ ≥ m,
(2.25)
per ogni m ≥ 0 fissato. Notiamo che, essendo
1
∫
−1
P`m (x) P`m
′ (x) dx = ∫
π
0
P`m (cos θ) P`m
′ (cos θ) sin θ dθ,
la (2.25) si pu`
o correttamente interpretare come relazione di ortogonalit`a nello spazio di Hilbert
2
L ((0, π), sin θdθ).
Esempio 2.8 Consideriamo il problema di S-L:
⎧
d2
⎪
2
⎪
⎪
⎪ dx2 u(x) − x u(x) + µu(x) = 0,
⎨
⎪
⎪
⎪
⎪
⎩ u(x) → 0 per x → ±∞.
x ∈ R,
(2.26)
Si ha in questo caso a = −∞, b = +∞, w ≡ 1, p ≡ 1, q = x2 . Le soluzioni sono:
un (x) = e−x
2
/2
Hn (x),
µn = 2n + 1,
n = 0, 1, 2, . . .
(2.27)
dove le funzioni Hn (x) sono i polinomi di Hermite, definiti da
2
dn −x2
e
= (−1)n Hn (x)e−x
n
dx
(cio`e sono, a meno del segno, i fattori polinomiali nelle derivate di e−x ). Si ha, ad esempio, H0 = 1,
H1 (x) = 2x, H2 (x) = 4x2 − 2.
2
2.3. ARMONICHE SFERICHE
31
Esempio 2.9 Consideriamo infine il problema di S-L:
⎧
d
x s2
d
⎪
⎪
⎪
(x
)
u(x)
−
(
+
) u(x) + µu(x) = 0,
⎪
⎪ dx dx
4 4x
⎨
⎪
⎪
⎪
⎪
⎪
⎩ u(0) < ∞ e u(x) → 0 per x → +∞
x > 0,
(2.28)
(s `e un intero non-negativo fissato). Si ha in questo caso a = 0, b = +∞, w ≡ 1, p(x) = x,
s2
q(x) = x4 + 4x
. Le soluzioni sono:
un,s (x) = csn xs/2 e−x/2 Lsn (x)
µsn = n +
s+1
,
2
n ≥ 0,
(2.29)
dove csn `e un fattore di normalizzazione, dato da
csn =
√
n! (n + s)! (2n + s + 1),
(2.30)
e le funzioni Lsn (x) sono definite da
Lsn (x) =
ex dn −x n+s
(e x ) .
xs dxn
(2.31)
Queste ultime risultano essere dei polinomi. Quelli di tipo L0n sono i polinomi di Laguerre
mentre in generale gli Lsn sono detti polinomi di Laguerre generalizzati (o “associati”).
2.3
Armoniche Sferiche
Possiamo interpretare lo sviluppo in serie di Fourier come lo sviluppo di una funzione definita
sulla circonferenza unitaria S1 :
f (θ) = ∑ fn einθ .
n∈Z
Analogamente, lo sviluppo in serie di Fourier su un rettangolo lo possiamo interpretare come lo
sviluppo di una funzione definita sul toro bidimensionale T2 :
f (θ, ϕ) = ∑ fmn ei(mθ+nϕ)
m,n∈Z
e, pi`
u in generale, la serie di Fourier n-dimensionale (1.52) corrisponder`a allo sviluppo di funzioni
definite sul toro Tn . Vogliamo ora vedere l’analogo dello sviluppo di Fourier per funzioni definite
sulla sfera unitaria S2 . Poich´e le funzioni einθ sono autofunzioni dell’operatore derivata seconda su
d2 inθ
= −n2 einθ e ein(θ+2π) = einθ ), l’idea `e quella di andare a cercare le autofunzioni
S1 (difatti dθ
2e
della “derivata seconda” sulla sfera, ovvero dell’operatore Laplaciano sferico. Per introdurre in
maniera appropriata tale operatore, ricordiamo il sistema delle coordinate polari di R3 :
32
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
x = ρ sin θ cos ϕ
y = ρ sin θ sin ϕ
z = ρ cos θ
θ ∈ (0, π) = angolo polare,
ϕ ∈ (−π, π) = angolo azimutale,
determinante Jacobiano = ρ2 sin θ
L’operatore Laplaciano (tridimensionale) espresso in tali coordinate `e dato da
1
∂
∂
1
∂2
̃ = 1 ∂ (ρ2 ∂ ) +
(sin
θ
)
+
.
∆
2
ρ2 ∂ρ
∂ρ
ρ2 sin θ ∂θ
∂θ
ρ2 sin θ ∂ϕ2
(2.32)
Se lo facciamo agire su una funzione definita su S2 (sempre interpretabile come una funzione
definita su R3 che non dipende da ρ e che restringiamo a ρ = 1), otteniamo il Laplaciano sferico
(o operatore di Laplace-Beltrami5 sulla sfera):
∆S2 =
1 ∂
∂
1 ∂2
(sin θ ) +
.
sin θ ∂θ
∂θ
sin2 θ ∂ϕ2
(2.33)
Cerchiamo allora gli autovalori e le autofunzioni di ∆S2 , o meglio di −∆S2 , risolvendo il problema
⎧
⎪
⎪ ∆S2 u(θ, ϕ) + µu(θ, ϕ) = 0,
⎨
⎪
⎪
⎩ u(θ, ϕ) = u(θ, ϕ + 2π).
0 < θ < π,
ϕ ∈ R,
(2.34)
Se tentiamo una soluzione a variabili separate, u(θ, ϕ) = Θ(θ)Φ(ϕ), otteniamo
dΘ
Θ d2 Φ
1 d
(sin θ
)Φ +
+ µ ΘΦ = 0,
sin θ dθ
dθ
sin2 θ dϕ2
e quindi (usando gli apici per denotare le derivate)
(sin θ Θ′ )′
1 Φ′′
+
+ µ = 0,
Θ sin θ
sin2 θ Φ
il che implica che esiste η ∈ C tale che
sin θ
Φ′′
(sin θ Θ′ )′ + sin2 θ µ = −
= η.
Θ
Φ
Il problema differenziale per Φ, tenuto conto del fatto che ϕ `e una coordinata periodica, `e
′′
⎧
⎪
⎪Φ + ηΦ = 0
⎨
⎪
⎪
⎩ Φ(ϕ) = Φ(ϕ + 2π),
5 In generale, l’operatore di Laplace-Beltrami su una variet`
a Riemanniana (corrispondente al “Laplaciano” sulla
variet`
a) `
e definito, in un sistema di coordinate locali, come
√
1
∣g∣ ∶= ∣det g ij ∣,
∆LB f = √ ∂i ( ∣g∣ g ij ∂j f ) ,
∣g∣
dove g ij `
e il tensore metrico della variet`
a.
2.3. ARMONICHE SFERICHE
33
che, come gi`
a sappiamo, ha soluzioni
Φm (ϕ) = eimϕ ,
ηm = m2 ,
m ∈ Z.
(2.35)
Una volta fissato η = ηm = m2 , il problema differenziale per Θ `e
dΘ
m2
1 d
(sin θ
) + (µ −
) Θ = 0,
sin θ dθ
dθ
sin2 θ
per il quale cerchiamo soluzioni limitate in θ = 0 e θ = π. Siamo perci`o di fronte al problema di
Sturm-Liouville considerato nell’esempio 2.7, per il quale sappiamo che la soluzione `e data dalle
funzioni di Legendre
∣m∣
Θm
` (θ) = P` (cos θ),
µ = `(` + 1),
` ≥ ∣m∣ .
Le soluzioni trovate per separazione di variabili sono dunque
∣m∣
m
imϕ
⎧
⎪
⎪ u`m (θ, ϕ) = Θ` (θ) Φm (ϕ) = P` (cos θ) e
⎨
⎪
⎪
m ∈ Z, ` ≥ ∣m∣ .
⎩ µ`m = `(` + 1),
(2.36)
e sono dette armoniche sferiche. Notiamo che, fissato ` ≥ 0, ci sono 2` + 1 diverse armoniche
sferiche u`m .
Ricordando le relazioni di ortogonalit`
a (2.25) delle funzioni di Legendre e (1.2) delle funzioni eimϕ ,
si possono normalizzare le funzioni u`m e ridefinire le armoniche sferiche come
¿
Á 2` + 1 (` − m)! ∣m∣
m
À
P (cos θ) eimϕ ,
(2.37)
Y` (θ, ϕ) = Á
4π (` + m)! `
per cui si ha
π
∫
π
dθ ∫
0
−π
′
′
dϕ [Y`m (θ, ϕ) Y`m′ (θ, ϕ) sin θ] = δ``′ δmm′ ,
(2.38)
per m, m′ ∈ Z e ` ≥ ∣m∣, `′ ≥ ∣m ∣. Osservando che dσ = sin θ dθ dϕ `e l’elemento di superficie della
sfera di raggio 1, possiamo riscrivere la precedente equazione come relazione di ortonormalit`a nello
spazio di Hilbert L2 (S2 , C):
∫
′
S2
Y`m Y`m′ dσ = δ``′ δmm′ ,
(2.39)
Vogliamo ora sviluppare una funzione f definita sulla sfera S2 , per la quale utilizzeremo la
rappresentazione in coordinate sferiche f (θ, ϕ), in una serie di armoniche sferiche:
+∞
`
f (θ, ϕ) = ∑ ∑ f`m Y`m (θ, ϕ) = ∑ ∑ f`m Y`m (θ, ϕ).
m∈Z `≥∣m∣
(2.40)
`=0 m=−`
Se f ∈ L2 (S2 , C) possiamo trovare i coefficienti f`m moltiplicando per Y`m entrambi i membri della
(2.40) e integrando su S2 in dσ. Usando la (2.39) si ottiene
f`m = ∫
S2
Y`m f dσ
ovvero, pi`
u esplicitamente,
f`m = ∫
π
0
π
dθ ∫
−π
dϕ [Y`m (θ, ϕ) f (θ, ϕ) sin θ] .
(2.41)
Come sempre siamo interessati a mettere meglio a fuoco il caso in cui f assume valori reali. In tal
caso, osservando che
f` −m = f `m ,
Y`−m = Y`m ,
34
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
si potr`
a scrivere
m
0
m
∑ ∑ f`m Y` = ∑ f`0 Y` + ∑ ∑ (f`m Y` + f`m Y`m )
m∈Z `≥∣m∣
m≥1 `≥m
`≥0
= ∑ f`0 Y`0 + 2 ∑ ∑ Re (f`m Y`m )
m≥1 `≥m
`≥0
e perci`
o, posto
⎧
⎪
se m = 0,
⎪0 ,
b`m = ⎨
⎪
⎪
⎩−2 Im f`m , se m ≥ 1,
⎧
⎪
se m = 0,
⎪f`0 ,
a`m = ⎨
⎪
⎪
⎩2 Re f`m , se m ≥ 1,
(2.42)
si avr`
a lo sviluppo in armoniche sferiche reali:
f (θ, ϕ) = ∑ ∑ [a`m Y`m (θ, ϕ) + b`m Y`−m (θ, ϕ)] ,
(2.43)
m≥0 `≥m
dove
¿
Á 2` + 1 (` − m)! m
À
P (cos θ) cos(mϕ), m ≥ 0
=
=Á
4π (` + m)! `
¿
Á 2` + 1 (` − m)! m
À
Y`−m = Im (Y`m ) = Á
P (cos θ) sin(mϕ), m ≥ 1.
4π (` + m)! `
Y`m
Re (Y`m )
(2.44)
Osservazione 2.10 Come gi`
a osservato nella discussione sul tamburo circolare, le funzioni cos(mϕ)
e sin(mϕ) hanno m zeri in [0, π) pi`
u altri m a distanza π. Dunque l’armonica sferica Y`m ha 2m
meridiani nodali opposti (ovvero m cerchi massimi nodali). D’altra parte, come sappiamo dalla
teoria generale dei problemi di Sturm-Liouville, per ogni m ≥ 0 fissato, le funzioni di Legendre
P`m (cos θ), ` = m, m + 1, m + 2, . . ., hanno esattamente ` − m zeri in (0, π) (nel caso delle funzioni
di Legendre tali zeri sono sempre simmetrici rispetto a θ = π/2 in quanto P`m (x) = ±P`m (−x)). Ne
consegue che l’armonica sferica Y`m ha `−m paralleli nodali. Paralleli e meridiani nodali delimitano
sulla superficie della sfera max{2m, 1} × (` − m + 1) zone a segno alterno (vedi figura 2.3).
Osservazione 2.11 Un risultato utile nelle applicazioni `e il Teorema di addizione delle armoniche
sferiche: se due vettori di coordinate polari (ρ, θ, ϕ) e (ρ′ , θ′ , ϕ′ ) formano fra loro un angolo6 γ,
allora si ha
`
4π
′
′
m
(2.45)
P` (cos γ) =
∑ Y`m (θ , ϕ ) Y` (θ, ϕ).
2` + 1 m=−`
2.4
Studio di alcuni sistemi in meccanica quantistica
Ricordiamo alcuni postulati fondamentali della meccanica quantistica.
Postulato 1. Lo stato di una particella `e descritto da una funzione d’onda
ψ ∈ L2 (RN , C),
2
∥ψ∥2 = 1;
Postulato 2. il modulo quadrato ∣ψ(x)∣ della funzione d’onda `e la densit`a di probabilit`a
di trovare la particella nella posizione x;
6 Risulta
che cos γ = cos θ cos θ′ + sin θ sin θ′ cos(ϕ − ϕ′ ).
2.4. STUDIO DI ALCUNI SISTEMI IN MECCANICA QUANTISTICA
35
Figura 2.3: Alcune armoniche sferiche rappresentate mediante toni di grigio sulla sfera. Si notino meridiani e paralleli nodali e si ricordi che le figure con m negativo si ottengono dalle corrispondenti con m
π
positivo tramite una rotazione di 2m
attorno al’asse polare.
36
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
Postulato 3. i possibili valori E dell’energia della particella si trovano risolvendo l’equazione
di Schr¨
odinger stazionaria
Hψ = Eψ,
(2.46)
ovvero ricercando autovalori e autovettori dell’operatore H, detto Hamiltoniana (quantistica) del sistema; gli autovettori ψE relativi all’autovalore E (detti “autostati”) sono stati
stazionari in cui l’energia del sistema assume con certezza il valore E;
Postulato 4. l’Hamiltoniana quantistica si ottiene da quella classica con la sostituzione
̵
p Ð→ −ih∇,
̵ = h/2π e h `e la costante di Planck, h ≈ 6.63 × 10−34 J s); dunque, se l’Hamiltoniana
(dove h
p2
classica ha la forma 2m
+ V (x), si ha
H =−
2.4.1
̵2
h
∆ + V.
2m
L’oscillatore armonico
L’equivalente quantistico dell’oscillatore armonico (unidimensionale) si ottiene scegliendo V (x) =
kx2
, dove k > 0 `e la costante elastica, ovvero l’Hamiltoniana quantistica
2
H =−
̵ 2 d2
kx2
h
+
2m dx2
2
(che va vista come operatore in L2 (R, C)). I possibili livelli energetici, e i corrispondenti stati
stazionari, si trovano dunque risolvendo il problema agli autovalori
̵2
h
kx2
ψ ′′ (x) +
ψ(x) = Eψ(x).
2m
2
√
` conveniente introdurre la pulsazione ω ∶= k/m e la nuove variabili
E
√
√
̵ ⎞
⎛
mω
h
,
ξ ∶= x
u(ξ) ∶= ψ ξ
̵h ,
mω ⎠
⎝
−
per cui l’equazione diviene
u′′ (ξ) − ξ 2 u(ξ) + µu(ξ) = 0,
(2.47)
̵ Notiamo che (2.47) `e un problema di Sturm-Liouville con
dove si `e posto µ ∶= 2E/ω h.
w(ξ) = 1,
p(ξ) = 1,
q(ξ) = ξ 2 ,
a = −∞,
b = +∞.
Poich´e cerchiamo soluzioni regolari e di classe L2 , dobbiamo inoltre porre la condizione che u(ξ) →
0 per ξ → ±∞.
Se poniamo
2
u(ξ) = e−ξ /2 f (ξ),
otteniamo per f l’equazione differenziale
f ′′ − 2ξf ′ + (µ − 1)f = 0,
che proviamo a risolvere per serie ponendo
∞
f (ξ) = ∑ fk ξ k .
k=0
(2.48)
2.4. STUDIO DI ALCUNI SISTEMI IN MECCANICA QUANTISTICA
37
Sostituendo nella (2.48), troviamo la condizione ricorsiva
fk+2 =
2k + 1 − µ
fk ,
(k + 2)(k + 1)
(2.49)
la quale, per k sufficientemente grandi, ci dice che
fk+2 2
≈ .
fk
k
Possiamo quindi stimare, in modo semi-rigoroso, il comportamento di f . Infatti, analizzando
separatamente i termini pari e quelli dispari, si ha che
f2j+2 1
≈ ,
f2j
j
f2j+3 1
≈ ,
f2j+1 j
per j sufficientemente grande, e quindi, asintoticamente,
f2j ∼
1
,
j!
f2j+1 ∼
1
,
j!
il che comporta che le due sotto-serie, pari e dispari, hanno (asintoticamente) un andamento
esponenziale, del tipo
∞
∑ f2j ξ
2j
2
∼ eξ ,
j=1
∞
∑ f2j+1 ξ
2j+1
2
∼ ξeξ .
j=1
Ma allora la funzione u(ξ) non soddisfa la condizione di decadimento all’infinito. L’unica possibilit`a
per evitare ci`
o e che che la serie che definisce la f abbia tutti i coefficienti nulli da un certo punto
in poi, ovvero che f sia un polinomio. Dalla relazione (2.49) si vede bene che tale condizione si
realizza se e soltanto se
µ = µn ∶= 2n + 1
(2.50)
per un qualche n ≥ 0, e si pone
f1 = 0, se n `e pari,
f0 = 0, se n `e dispari
(mentre, rispettivamente, f0 e f1 sono arbitrarie). Per ciascuno di questi µn si ha dunque una
soluzione della (2.47) del tipo
2
un (ξ) = e−ξ /2 Hn (ξ),
(2.51)
dove Hn `e un polinomio di grado n fatto di sole potenze con la stessa parit`a di n. Il problema di
Sturm-Liouville ammette perci`
o le infinite coppie autofunzione-autovalore (un , µn ), n ≥ 0. Notiamo che i polinomi Hn non sono completamente determinati perch´e dipendono dalla scelta delle
costanti f0 (per n pari) e f1 (per n dispari).
Una rappresentazione pi`
u esplicita dei polinomi Hn `e fornita dai seguenti risultati.
Proposizione 2.12 Se u `e soluzione di (2.47) (autofunzione) con autovalore µ, allora u′ − ξu `e
autofunzione con autovalore µ + 2.
Dimostrazione Si tratta di un semplice calcolo:
(
d2
− ξ 2 ) (u′ − ξu) = u′′′ − ξu′′ − 2u′ − ξ 2 u′ + ξ 3 u
dξ 2
= (u′′ − ξ 2 u)′ − ξ(u′′ − ξ 2 u) + 2ξu − 2u′
= −µu′ + µξu + 2ξu − 2u′ = −(µ + 2)(u′ − ξu).
38
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
◻
La Proposizione 2.12 permette di “generare” tutta la successione delle autofunzioni un . Infatti,
osservando che la prima coppia autofunzione-autovalore `e
u0 (ξ) = e−ξ/2 ,
µ0 = 1,
d
(corrispondente alla scelta f0 = 1) si ha che u1 = ( dξ
−ξ)u0 `e autofunzione con autovalore µ1 = µ0 +2,
d
d
2
u2 = ( dξ − ξ)u1 = ( dξ − ξ) u0 `e autofunzione con autovalore µ2 = µ1 + 2, e cos`ı via (si noti che a
questa maniera si esauriscono tutti gli autovalori (2.50)). In generale, l’n-esima autofunzione sar`a
data da
n
d
un = ( − ξ) u0 .
(2.52)
dξ
Proposizione 2.13 Per le un date da (2.52), i polinomi Hn sono dati da
Hn (ξ) = eξ
2
dn −ξ2
e
dξ n
(2.53)
e sono quindi la parte polinomiale delle derivate della funzione e−ξ . Polinomi di questo tipo sono
detti di Hermite.7
2
Dimostrazione Procediamo per induzione. Per n = 0 la tesi `e vera in quanto H0 = 1 = eξ e−ξ .
Supponendo ora che la tesi sia vera per un certo n ≥ 0 scriviamo
2
2
2
d dn −ξ2
d −ξ2
dn+1 −ξ2
(e Hn (ξ)) = e−ξ (−2ξHn + Hn′ ) .
e
=
e
=
dξ n+1
dξ dξ n
dξ
D’altra parte
un+1 = e−ξ
2
/2
Hn+1 = (
per cui Hn′ −2ξHn = Hn+1 , e quindi
◻
2
2
d
− ξ) (e−ξ /2 Hn ) = e−ξ (Hn′ − 2ξHn ) ,
dξ
dn+1 −ξ 2
e
dξ n+1
= e−ξ Hn+1 . Il passo dell’induzione `e cos`ı dimostrato.
2
Tornando alle variabili fisiche si ottengono le autofunzioni dell’oscillatore armonico quantistico
√
(non normalizzate) ψn (x) = un (x mω
̵ ) e i corrispondenti autovalori
h
En =
̵
̵
ωh
ωh
̵
µn =
+ nω h,
2
2
n ≥ 0.
Si arriva cos`ı alla notevole conclusione che le possibili energie di un oscillatore quantistico partono
da un livello minimo positivo
̵
ωh
E0 =
2
(mentre il corrispondente oscillatore classico ha minima energia zero, quando il punto materiale
resta fermo nell’origine), e sale per intervalli discreti, detti anche “quanti di energia”,
̵
∆E = ω h.
̵ ha un valore piccolissimo, l’insieme discreto delle
Notiamo che sulla scala macroscopica, in cui h
energie viene di fatto a confondersi con l’insieme delle energie classiche [0, +∞).
2
Nella Figura 2.4 sono rappresentati En e ∣ψn ∣ per alcuni valori di n.
7 Definizioni
pi´
u comuni dei polinomi di Hermite sono: Hn (ξ) = (−1)n eξ
un mediante un = (ξ −
d n
) u0 )
dξ
e Hn (ξ) =
2
(−1)n eξ /2
dn
dξn
2
e−ξ /2 .
2
dn −ξ2
e
dξn
(che corrisponde a generare le
2.4. STUDIO DI ALCUNI SISTEMI IN MECCANICA QUANTISTICA
n=0
n=1
2
2
E0 = 0.171 eV
E1 = 0.514 eV
1.5
1.5
1
1
0.5
0.5
0
−4
−2
0
2
4
0
−4
−2
n=2
0
2
4
n = 20
2
2
E2 = 0.857 eV
E20 = 7.03 eV
1.5
1.5
1
1
0.5
0.5
0
−4
39
−2
0
r (10−9 m)
2
4
0
−4
−2
0
r (10−9 m)
2
4
Figura 2.4: Rappresentazione di alcune autofunzioni ψn (normalizzate) dell’oscillatore armonico quantistico: la curva continua rappresenta ∣ψ∣2 ; la parabola tratteggiata `e l’energia potenziale; la linea orizzontale
`e l’energia En (autovalore). In questa figura, r `e la coordinata spaziale (indicata con x nel testo). Il valore
di ω in questo esempio `e 1.05 × 1015 Hz, corrispondente a k = 1 N/m.
40
2.4.2
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
L’atomo d’idrogeno
Il modello quantistico dell’atomo di idrogeno, ovvero di un elettrone nel campo elettrico generato da
una carica positiva puntiforme posta nell’origine, si ottiene considerando il potenziale Coulombiano
attrattivo
e2
V (x) = −
4π0 ∣x∣
ovvero l’Hamiltoniana quantistica
H =−
̵2
e2
h
∆−
,
2me
4π0 ∣x∣
dove me `e la massa dell’elettrone. I possibili livelli energetici dell’atomo d’idrogeno si trovano
dunque risolvendo il problema agli autovalori
−c∆ψ(x) −
α
ψ(x) = Eψ(x),
∣x∣
ψ ∈ L2 (R3 , C).
(2.54)
dove per brevit`
a si `e posto
̵2
e2
h
,
α ∶=
.
2me
4π0
Data la simmetria del problema conviene passare alle cooordinate polari, per cui la precedente
equazione diventa
c ∶=
[
c ∂
∂2
c
∂
∂
c
α
2 ∂
̃= 0
(ρ
)
+
(sin
θ
)
+
+ + E] ψ
2
2
2
2
2
ρ ∂ρ
∂ρ
ρ sin θ ∂θ
∂θ
ρ
ρ sin θ ∂ϕ
ovvero, ricordando la definizione del Laplaciano sferico (2.33),
[
∂
c
α
c ∂
̃ = 0.
(ρ2 ) + 2 ∆S2 + + E] ψ
ρ2 ∂ρ
∂ρ
ρ
ρ
(2.55)
Cerchiamo una soluzione a variabili separate, della forma
̃ θ, ϕ) = R(ρ) S(θ, ϕ).
ψ(ρ,
Sostituendo nella precedente equazione si ottiene
c 2 ′ ′
cR
α
(ρ R ) S + 2 ∆S2 S + ( + E) RS = 0
2
ρ
ρ
ρ
da cui, moltiplicando per
ρ2
,
cRS
si ha che deve esistere µ ∈ C tale che
(ρ2 R′ )′ ρ
∆S S
+ (α + Eρ) = − 2 = µ.
R
c
S
(2.56)
Come sappiamo, l’equazione −∆S2 S = µS ha come soluzioni le armoniche sferiche:
µ = µ`m = `(` + 1),
S(θ, ϕ) = Y`m (θ, ϕ),
m ∈ Z,
` ≥ ∣m∣.
Fissati ` e m, dunque, il problema per la parte radiale diventa
ρ
ρ2 R′′ + 2ρR′ + [ (α + Eρ) − `(` + 1)] R = 0
c
e, posto g(ρ) =
√
ρ R(ρ) si ottiene per g(ρ) l’equazione
ρ2 g ′′ + ρ g ′ + [
ρ
(2` + 1)2
(α + Eρ) −
] g = 0.
c
4
(2.57)
2.4. STUDIO DI ALCUNI SISTEMI IN MECCANICA QUANTISTICA
41
Supponiamo ora di restringere la ricerca delle soluzioni al caso E < 0 (in analogia col caso classico
dove le soluzioni del problema di Keplero con energia E < 0 sono orbite chiuse). Allora col cambio
di variabile
√
√
ξ = 2 −E/c ρ,
g(ρ) = f (2 −E/c ρ) ,
si ottiene per f (ξ) l’equazione
αξ
ξ 2 (2` + 1)2
ξ 2 f ′′ + ξf ′ + [ √
−
−
] f = 0.
4
4
2 −cE
Dividendo per ξ e ponendo
si ottiene infine
α
λ= √
2 −cE
ξ (2` + 1)2
ξf ′′ + f ′ + [λ − ( +
)] f = 0,
4
4ξ
(2.58)
che `e un’equazione di Laguerre con s = 2`+1 (vedi Esempio 2.9). Sappiamo allora che gli autovalori
sono dati da
s+1
= nr + ` + 1,
nr = 0, 1, 2, . . . .
λ = nr +
2
Esprimendo E in funzione di λ si ottiene
E=−
α2
4 c (nr + ` + 1)2
da cui, posto
n = nr + ` + 1,
e ricordando le definizioni di c e α, si ottengono i possibili livelli energetici dell’atomo d’idrogeno:
En = −
1
e4 me
e4 m e 1
=− 2 2 2,
2
2
2
2
̵
32π 0 h n
80 h n
n = 1, 2, 3, . . . .
4
e me
o dimosrare che gli stati elettronici
Risulta che il fattore 8
2 h2 vale all’incirca 13.6 eV. Ora, si pu`
0
di energia E ≥ 0 corrispondono a stati in cui l’elettrone non `e pi`
u legato al protone. Pertanto
l’energia di 13.6 eV `e la cosiddetta energia di ionizzazione dell’atomo d’idrogeno. Il valore trovato
teoricamente corrisponde perfettamente al valore trovato per via sperimentale. Anche le misure
delle energie di transizione fra un livello e l’altro (lo spettro dell’idrogeno) hanno un ottimo accordo
con i dati sperimentali.
Per identificare le autofunzioni radiali conviene utlizzare gli indici n e `, piuttosto che nr e `.
Sappiamo quindi dall’Esempio 2.9 che tali autofunzioni si possono esprimere esplicitamente in
termini di polinomi di Laguerre:
fn,` (ξ) = c2`+1
nr ξ
Quindi, ponendo
2`+1
2
2`+1
e−ξ/2 L2`+1
nr (ξ) = cn−`−1 ξ
2`+1
2
e−ξ/2 L2`+1
n−`−1 (ξ).
√
α
e2 m e
κn ∶= 2 −En /c =
=
̵ 2n ,
2cn 4π0 h
√
e risostituendo g(ρ) = f (2 En /c ρ) = f (κn ρ) e R(ρ) = ρ−1/2 g(ρ), possiamo scrivere
2`+1
2
ρ` e−κn ρ/2 L2`+1
Rn,` (ρ) = ρ−1/2 fn,` (κn ρ) = c2`+1
n−`−1 κn
n−`−1 (κn ρ).
(2.59)
Le autofunzioni complete, dette anche orbitali dell’atomo di idrogeno, sono infine date da
̃n,`,m (ρ, θ, ϕ) = Rn,` (ρ) Y m (θ, ϕ).
ψ
`
(2.60)
42
CAPITOLO 2. PROBLEMI DI STURM-LIOUVILLE
Ricordiamo (postulato 3) che tali autofunzioni sono stati stazionari degli elettroni e quindi, in linea
di principio, se non ci sono perturbazioni esterne, sono destinati a perdurare indefinitamente.8 Gli
indici che abbiamo utilizzato per identificare gli orbitali sono i cosiddetti
• numero quantico principale: n = nr + ` + 1 = 1, 2, 3, . . .,
• numero quantico orbitale: ` = 0, 1, 2, . . . , n − 1,
• numero quantico magnetico: −` ≤ m ≤ `
(nr si chiama numero quantico radiale). Notiamo che per ogni n fissato ci sono
n−1
n−1
`=0
`=0
∑ (2` + 1) = 2 ∑ ` + n = 2
n(n − 1)
+ n = n2
2
orbitali che hanno la stessa energia En . In termini pi`
u matematici, l’autospazio relativo all’autovalore En ha dimensione n2 .
Un orbitale caratterizzato dai numeri quantici n, ` e m (oppure da nr , ` e m) presenta certe
superfici nodali in cui la funzione d’onda si annulla e che possiamo dedurre dalla discussione gi`a
effettuata sulle armoniche sferiche (per quanto riguarda la parte angolare) e dal punto (iv) del
teorema 2.2 (per quanto riguarda la parte radiale). In particolare, avremo ` − ∣m∣ coni nodali
(superfici con θ costante, che per θ = 0 sono piani orizzontali e che per θ =/ 0 si presentano sempre
a due falde simmetriche), ∣m∣ piani verticali nodali (superfici con ϕ mod π costante) e nr (cio`e
n − ` − 1) sfere nodali (superfici con ρ costante).
Osservazione 2.14 Tipicamente, il numero quantico principale `e detto anche “livello energetico”
e il numero quantico orbitale viene identificato da lettere: “s” per ` = 0, “p” per ` = 1, “d” per ` = 2,
“f” per ` = 3, “g” per ` = 4. Per caratterizzare completamente un orbitale si introduce, piuttosto
che l’indicazione del numero quantico magnetico m, una particolare notazione che identifica le
superfici nodali angolari (che naturalmente dipendono da m). Ad esempio, gli orbitali 2px , 2py e
2pz hanno n = 2, ` = 1 e sono caratterizzati, rispettivamente, dai piani nodali x = 0, y = 0 e z = 0
(corrispondenti a m = −1, m = 1 e m = 0). L’orbitale 3dx2 −y2 ha n = 3, ` = 2 ed `e caratterizzato
dalla coppia di piani nodali x2 − y 2 = 0 (ovvero x = y e x = −y), corrispondente a m = 2. L’orbitale
3d2z2 −x2 −y2 (di solito abbreviato in 3dz2 ) ha n √= 3, ` = 2 e presenta il cono nodale descritto
dall’equazione 2z 2 − x2 − y 2 = 0 (ovvero cos θ = 1/ 3), corrispondente a m = 0.
Per una piacevole ed accurata galleria di orbitali atomici (e molecolari) si pu`o visitare il sito
web www.shef.ac.uk/chemistry/orbitron/ (The Orbitron: a gallery of atomic and molecular
orbitals).9
8 In realt`
a, dallo studio del sistema che si ottiene accoppiando l’equazione di Schr¨
odinger con l’equazione (quantistica) per il campo elettromagnetico ci si accorge che un elettrone ha una certa probabilit`
a di passare da un orbitale
a un altro assorbendo o emettendo un fotone di energia corrispondente alla differenza dei livelli energetici dei due
orbitali.
9 Sar`
a bene ricordare che quanto detto finora riguarda, a rigore, solamente l’atomo di idrogeno. La descrizione
resta inoltre valida anche per l’elettrone pi`
u esterno degli elementi cosiddetti alcalini (la prima colonna a sinistra
nella tavola periodica). Pi`
u in generale, gli orbitali degli atomi con pi`
u elettroni hanno una struttura, in prima
approssimazione, simile a quella appena descritta (per cui si pu`
o parlare ancora di orbitali di tipo “s”, “p” ecc.)
ma con una differenza fondamentale: l’interazione coulombiana fra gli elettroni fa s`ı che orbitali che sarebbero
` per questo motivo
energeticamente equivalenti nel caso dell’idrogeno non lo siano pi`
u per atomi pi`
u complicati. E
che gli orbitali degli atomi della tavola periodica hanno un particolare “ordine di riempimento”, che segue la crescita
dell’energia propria degli orbitali stessi.
Capitolo 3
Trasformate di Fourier
3.1
Trasformata di Fourier di funzioni integrabili
Consideriamo il seguente problema ai valori iniziali per l’equazione delle onde:
⎧
utt (x, t) = c2 uxx (x, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(x, 0) = ϕ(x),
⎨
ut (x, 0) = ψ(x),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
sup ∣u(x, t)∣ < ∞,
⎪
⎪
⎩ x∈R
x ∈ R, t > 0,
x ∈ R,
(3.1)
x ∈ R,
t ≥ 0.
Osserviamo che, a differenza dei problemi studiati finora, questo `e posto sull’intera retta reale, e le
usuali condizioni al contorno di Dirichlet o Neumann sono state in un certo senso sostituite dalla
condizione di finitezza della soluzione. Proviamo tuttavia a cercare come al solito una soluzione a
variabili separate u(x, t) = X(x)T (t), che ci porta alla condizione
X ′′
T ′′
=
=µ∈C
2
c T
X
e al seguente problema di Sturm-Liouville per la X:
⎧
′′
⎪
⎪
⎪ X (x) = µX(x),
⎨
lim X(x) < ∞.
⎪
⎪
⎪
⎩ ∣x∣→∞
x∈R
(3.2)
Posto µ = λ2 , la soluzione generale dell’equazione X ′′ (x) = µX(x) `e
X(x) = a eλx + b e−λx
che non ha soluzioni limitate se Re λ =/ 0. Dunque λ dev’essere del tipo λ = ik con k ∈ R. Si
perviene perci`
o alla conclusione che i µ ammissibili sono dati da
µ = −k 2 ,
k ∈ R,
e le corrispondenti soluzioni del problema di Sturm-Liouville sono
Xk (x) = a eikx + b e−ikx ,
k ∈ R,
a, b ∈ C.
Risolvendo anche l’equazione differenziale per T si ottiene la famiglia di soluzioni a variabili
separate
uk (x, t) = [a(k) eikx + b(k) e−ikx ] cos(ckt) + [c(k) eikx + d(k) e−ikx ] sin(ckt).
43
44
CAPITOLO 3. TRASFORMATE DI FOURIER
Notiamo che l’evidente differenza col caso dell’intervallo finito consiste nel fatto che adesso la
famiglia di soluzioni dipende dall’indice continuo k che ha sostituito l’indice discreto n. Si pu`o
pensare quindi di scrivere la soluzione generale, almeno formalmente, come integrale su k ∈ R delle
soluzioni uk :
u(x, t) = ∫
+∞
−∞
uk (x, t) dk = ∫
+∞
−∞
[A(k) eikx cos(ckt) + B(k) eikx sin(ckt)] dk,
dove A(k) = a(k) + b(−k) e B(k) = c(k) − d(−k), per cui, affinch´e i dati iniziali siano soddisfatti,
ci ritroviamo con le condizioni
∫
+∞
−∞
A(k) eikx dk = ϕ(x),
∫
+∞
−∞
ck B(k) eikx dk = ψ(x).
Ci si trova quindi di fronte al seguente problema generale: data una funzione f (x), x ∈ R,
determinare, se possibile, una funzione F (k), k ∈ R, tale che
∫
+∞
−∞
F (k) eikx dk = f (x).
(3.3)
Questo problema `e analogo a quello che ci eravamo posti all’inizio della discussione sulle serie di
Fourier, quando ci chiedevamo se fosse possibile sviluppare una funzione periodica in una serie
del tipo (1.1). Difatti, la (3.3) si pu`
o considerare la versione continua della serie di Fourier (1.1):
la serie `e diventata un integrale, l’indice n `e diventato una variabile continua1 e i coefficienti di
Fourier sono divenuti una funzione, F (k), detta trasformata di Fourier di f .
Per analogia con i coefficienti di Fourier ci aspettiamo quindi che (a meno di fattori di normalizzazione) la trasformata di Fourier abbia la forma
F (k) = ∫
+∞
−∞
f (x) e−ikx dx.
Partendo da queste motivazioni, passiamo a introdurre e studiare le trasformate di Fourier in un
quadro rigoroso.
Definizione 3.1 Si chiama trasformata di Fourier di f ∈ L1 (RN ) la funzione
fˆ(k) ∶=
1
−ik⋅x
dx,
∫ f (x) e
(2π)N /2 Rn
k ∈ RN .
(3.4)
Osserviamo subito che fˆ(k) `e ben definita, anzi, `e limitata su RN , difatti
∣fˆ(k)∣ ≤
1
∫ ∣f (x)∣ dx = cN ∥f ∥1 ,
(2π)N /2 Rn
(3.5)
dove, per comodit`
a, abbiamo posto
cN ∶=
1
.
(2π)N /2
(3.6)
Possiamo dire, in altre parole, che la trasformazione di Fourier f ↦ fˆ `e un’applicazione continua
da L1 (RN ) in L∞ (RN ). Vediamo di dimostrare qualcosa di pi`
u.
Lemma 3.2 (di Riemann-Lebesgue) Se f ∈ L1 (R) si ha lim fˆ(k) = 0.2
∣k∣→+∞
1 Pi`
u esattamente, confrontando la (3.3) con la serie di Fourier 2`-periodica (1.25), si osserva che `
e la variabile
discreta kn = nπ/` (ovvero i punti del reticolo reciproco) a essere diventata la variabile continua k per ` → ∞. Se
si interpreta la serie di Fourier come una sovrapposizione di oscillazioni elementari di frequenze kn /2π, possiamo
interpretare la (3.3) come una sovrapposizione di oscillazioni elementari le cui frequenze k/2π variano in un continuo.
2 Notare l’analogia con il lemma di Riemann-Lebesgue per le serie di Fourier (Corollario 1.3).
3.1. TRASFORMATA DI FOURIER DI FUNZIONI INTEGRABILI
45
Dimostrazione Fissato > 0, per il Teorema A.8 esiste g ∈ C0∞ (R) tale che ∥f − g∥1 < . Usando
la (3.5) (e la linearit`
a della trasformazione di Fourier) potremo scrivere
∣fˆ(k)∣ ≤ ∣ˆ
g (k)∣ + ∣fˆ(k) − gˆ(k)∣ ≤ ∣ˆ
g (k)∣ + c1 ∥f − g∥1 ≤ ∣ˆ
g (k)∣ + c1 .
Sia ρ > 0 tale che il supporto di g `e contenuto in (−ρ, ρ). Utilizzando l’integrazione per parti si
ottiene:
ρ
ρ
e−ikx
∣ˆ
g (k)∣ = c1 ∣ ∫ g(x) e−ikx dx∣ = c1 ∣ ∫ g ′ (x)
dx∣
ik
−ρ
−ρ
≤
+∞
c1 ∥g ′ ∥1
c1
∣g ′ (x)∣ dx ≤
,
∫
∣k∣ −∞
∣k∣
Per ∣k∣ sufficientemente grande quest’ultima quantit`a potr`a essere resa pi`
u piccola di e si avr`a
perci`
o ∣fˆ(k)∣ ≤ (c1 + 1).
◻
Proposizione 3.3 Se f ∈ L1 (RN ) allora fˆ ∈ C(RN ) e lim fˆ(k) = 0.
∣k∣→+∞
Dimostrazione La continuit`
a segue dal teorema della convergenza dominata osservando che
fˆ(k) − fˆ(k0 ) = cN ∫
Rn
f (x) (e−ik⋅x − e−ik0 ⋅x ) dx,
e che, per ogni x ∈ RN , si ha limk→ko f (x) (e−ik⋅x − e−ik0 ⋅x ) = 0 con
∣f (x) (e−ik⋅x − e−ik0 ⋅x )∣ ≤ 2∣f (x)∣.
Per N = 1 la propriet`
a di decadimento all’infinito `e il lemma di Riemann-Lebesgue. Per N ≥ 1,
se ∣k∣ → ∞, esister`
a almeno una direzione j tale che ∣kj ∣ → ∞. Per il Teorema di Fubini possiamo
scrivere
+∞
fˆ(k) = cN ∫
{∫
f (x) eik⋅x dxj } dx1 ⋯ Ò
dxj ⋯dxN .
RN −1
−∞
+∞
Per il lemma di Riemann-Lebesgue la funzione integranda ∫−∞ f (x) eik⋅x dxj tende a 0 e inoltre
+∞
`e limitata dalla funzione integrabile ∫−∞ ∣f (x)∣ dxj . Dunque si pu`o applicare il Teorema della
convergenza dominata e concludere che fˆ(k) tende a 0 per ∣k∣ → ∞.
◻
Esempio 3.4 Fissato α > 0, con un calcolo diretto si ottiene che la trasformata di Fourier della
funzione
⎧
⎪
⎪1, per −α ≤ x ≤ α,
f (x) = ⎨
⎪
⎪
⎩0, altrimenti.
`e
√
√
2 sin(αk) α 2
fˆ(k) = √
= √ sinc(αk),
k
π
π
dove sinc x ∶=
sin x
x
(vedi Figura 3.1)
Esercizio 3.5 Dimostrare le seguenti propriet`
a della trasformata di Fourier fˆ di f ∈ L1 (RN ):
1. se f `e reale, allora fˆ(k) = fˆ(−k);
2. se f `e reale pari allora fˆ `e reale pari, e se f `e reale dispari allora fˆ `e immaginaria dispari;
3. fissato a ∈ RN , e posto (Ta f )(x) ∶= f (x − a), si ha
−ik⋅a ˆ
̂
T
f (k).
a f (k) = e
(3.7)
46
CAPITOLO 3. TRASFORMATE DI FOURIER
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−20
−15
−10
−5
0
5
10
15
20
Figura 3.1: Grafico della funzione sinc x.
4. fissato α ∈ R, α =/ 0, e posto g(x) ∶= f (αx), si ha
−N
gˆ(k) = ∣α∣
fˆ(k/α).
(3.8)
Proposizione 3.6 Sia f ∈ L1 (R). Se xn f ∈ L1 (R), allora fˆ ∈ C n (R) e
d nˆ
n f = (i
x̂
) f.
dk
(3.9)
Se f ∈ C n (R), con f (m) ∈ L1 (R) per ogni 0 ≤ m ≤ n, allora
nf
d̂
= (ik)n fˆ.
dxn
(3.10)
Dimostrazione Dimostriamo entrambe le proposizioni nel caso n = 1, dopodich´e il caso generale
∂
segue facilmente per induzione su n. Per dimostrare la (3.9) osserviamo che ∣ ∂k
f (x) e−ikx ∣ =
∣−ixf (x) e−ikx ∣ = ∣xf (x)∣, con ∣xf (x)∣ integrabile, e dunque si pu`o derivare sotto il segno di
integrale3 ottenendo
+∞
+∞
d
f (x) e−ikx dx = −i ∫
xf (x) e−ikx dx,
∫
dk −∞
−∞
che ci d`
a la (3.9) (per n = 1). La continuit`a della derivata segue direttamente dalla Proposizione
3.3.
df
∈ L1 (R), si pu`o scrivere
Per dimostrare la (3.10) osserviamo che, poich´e per ipotesi dx
∫
+∞
−∞
R df
df
(x) e−ikx dx = lim ∫
(x) e−ikx dx.
R→+∞ −R dx
dx
3 Ricordiamo il seguente teorema [9]: se g ∶ R2 → R, g = g(x, k), `
e integrabile rispetto a x per ogni k, derivabile
∂
rispetto a k per ogni x e inoltre ∣ ∂k
g(x, k)∣ ≤ γ(x) con γ integrabile, allora
d
∂
g(x, k) dx
∫ g(x, k) dx = ∫
dk
∂k
3.1. TRASFORMATA DI FOURIER DI FUNZIONI INTEGRABILI
47
Inoltre poich´e, sempre per ipotesi, f ∈ C 1 (R), si pu`o integrare per parti:
R
∫
−R
R
x=R
df
+ ik ∫ f (x) e−ikx dx.
(x) e−ikx dx = f (x) e−ikx ∣
x=−R
dx
−R
Supponiamo per un momento che f (x) abbia limite per x → ±∞: poich´e f `e integrabile tale limite
dev’essere 0 e si ha perci`
o, passando al limite per R → ∞,
∫
+∞
−∞
+∞
df
f (x) e−ikx dx,
(x) e−ikx dx = ik ∫
dx
−∞
ovvero la (3.10) (per n = 1). Resta quindi solo da dimostrare che il limite x → ±∞ di f (x) esiste.
df
Ma dx
∈ C(R), e dunque si pu`
o scrivere
f (x) = f (0) + ∫
Essendo
df
dx
x
0
x df
(x′ ) dx′
dx
∈ L1 (R) si ha che limx→±∞ ∫0
df ′
(x ) dx′ .
dx
esiste e perci`o anche limx→±∞ f (x) esiste. ◻
Utilizzando il teorema di Fubini si pu`o estendere il precedente risultato al caso N -dimensionale.
A questo scopo ricordiamo la notazione “multi-indice”. Un multi-indice `e una N -upla di interi
non-negativi α = (α1 , α2 , . . . , αN ). L’ordine del multi-indice `e
∣α∣ ∶= α1 + α2 + ⋯ + αN .
Se x = (x1 , x2 , . . . , xN ) ∈ RN si pone
αN
α2
1
xα ∶= xα
1 x2 ⋯xN
e, se f ∶ RN → C ha derivate continue fino all’ordine ∣α∣, si pone
∇α f ∶=
∂ ∣α∣ f
αN
α2
1
∂xα
1 ∂x2 ⋯∂xN
.
n
Teorema 3.7 Sia f ∈ L1 (RN ). Se ∣x∣ f (x) ∈ L1 (RN ), allora fˆ ha derivate continue fino all’ordine n e, per ogni multi-indice α con ∣α∣ ≤ n, si ha
α f = (i∇)α fˆ .
x̂
(3.11)
Se f ∈ C n (RN ), e le derivate di f fino all’ordine n stanno in L1 (RN ) allora, per ogni multi-indice
α con ∣α∣ ≤ n, si ha
α f = (ik)α fˆ.
̂
∇
(3.12)
Osserviamo dunque che la trasformazione di Fourier ha la fondamentale propriet`a di trasformare
derivazioni in moltiplicazioni per polinomi e viceversa.4 Il contenuto di questi risultati si pu`o
riassumere nelle semplici regole mnemoniche:
ˆ i∇
x z→
ˆ ik .
∇ z→
A questo punto `e opportuno introdurre uno spazio funzionale molto importante per la teoria delle
trasformate di Fourier.
Definizione 3.8 Lo spazio di Schwartz S(RN ) `e lo spazio vettoriale delle funzioni f ∈ C ∞ (RN )
tali che, per ogni coppia di multi-indici α e β, esiste Mαβ ≥ 0 tale che
∣xα ∇β f (x)∣ ≤ Mαβ
per ogni x ∈ RN .
4 Si
noti l’analogia con la propriet`
a (1.22) dei coefficienti di Fourier.
48
CAPITOLO 3. TRASFORMATE DI FOURIER
Osserviamo che le funzioni di Schwartz sono funzioni C ∞ tali che esse e tutte le loro derivate
decadono all’infinito pi`
u rapidamente dell’inverso di qualunque polinomio. Di conseguenza si ha
C0∞ (RN ) ⊂ S(RN ) ⊂ L1 (RN ).
Osservamo anche che
(i) lo spazio di Schwartz `e chiuso per moltiplicazione tra funzioni; in altre parole, se f, g ∈ S(RN )
si ha f g ∈ S(RN ).
(ii) lo spazio di Schwartz `e chiuso per derivazioni e moltiplicazioni per polinomi ovvero, se
f ∈ S(RN ) e α `e un qualunque multi-indice, si ha ∇α f ∈ S(RN ) e xα f ∈ S(RN ).
Sullo spazio di Schwartz definiamo una particolare nozione di convergenza.5
Definizione 3.9 Sia {fn } una successione di funzioni di Schwartz. Diciamo che fn converge in
S(RN ) a f ∈ S(RN ) se per ogni coppia di multi-indici α e β si ha che
lim xα ∇β fn (x) = xα ∇β f (x)
n→∞
uniformemente rispetto a x.
Proposizione 3.10
a) Se f ∈ S(RN ) allora fˆ ∈ S(RN ).
b) La trasformazione di Fourier `e continua sullo spazio di Schwartz, ovvero se fn → f in S(RN )
(definizione 3.9) allora fˆn → fˆ in S(RN ).
Dimostrazione a) Osserviamo innanzitutto che le ipotesi del Teorema 3.7 sono soddifatte da
ogni funzione di Schwartz per ogni ordine n. Dunque, Se f ∈ S(RN ) e se α e β sono due multi-indici
qualunque, utilizzando (3.11) e (3.12) si potr`a scrivere
k α ∇β fˆ = k α [(−ix)β f ]̂= (−i)∣α∣+∣β∣ [∇α xβ f ]̂.
Poich´e, come sopra osservato, S(RN ) `e chiuso sotto l’applicazione di ∇α e xβ , allora ∇α xβ f `e
anch’essa una funzione di Schwartz e si ha, in particolare, che ∇α xβ f ∈ L1 (RN ). Dunque
∣k α ∇β fˆ(k)∣ ≤ cN ∥∇α xβ f ∥1 =∶ Mαβ
e perci`
o fˆ ∈ S(RN ).
b) Sia ora fn → f una successione convergente in S(RN ) (definizione 3.9). Per linearit`a baster`
a considerare il caso f = 0. Fissati due multi-indici α e β, dobbiamo dunque dimostrare che
α β ˆ
k ∇ fn (k) → 0 uniformemente. Con passaggi analoghi ai precedenti si ottiene
∣k α ∇β fˆn (k)∣ ≤ cN ∥∇α xβ fn ∥1
e d’altra parte possiamo scrivere
2N
∥∇α xβ fn ∥1 = ∫
≤∫
1
RN
2N
∣x∣
(∣x∣
+ 1) ∣∇α xβ fn (x)∣
∣x∣
RN
2N
2N
+1
dx sup ∣(∣x∣
+1
dx.
+ 1) ∇α xβ fn (x)∣.
x∈RN
5 Si pu`
o definire una topologia su S(RN ) in cui risulta la convergenza di una successione `
e equivalente alla
Definizione 3.9. Con tale topologia, S(RN ) `
e uno spazio vettoriale topologico completo e metrizzabile, ovvero esiste
una metrica che induce la topologia. Per approfondire si veda il libro di Rudin [11].
3.1. TRASFORMATA DI FOURIER DI FUNZIONI INTEGRABILI
L’integrale ∫RN
1
∣x∣2N +1
49
dx `e finito e, per l’ipotesi di convergenza fn → 0 in S(RN ), si ha
2N
lim sup ∣(∣x∣
n→∞ x∈RN
+ 1) ∇α xβ fn (x)∣ = 0
2N
(perch´e (∣x∣ + 1) ∇α xβ fn si pu`
o ovviamente scrivere come somma di un numero finito di espressioni del tipo xγ ∇δ f ). Pertanto limn→∞ ∥∇α xβ fn ∥1 = 0, il che dimostra che k α ∇β fˆn (k) → 0
uniformemente.
◻
Esempio 3.11 Calcoliamo la trasformata di Fourier della funzione φ(x) = e−αx /2 , con α > 0.
Osserviamo che φ `e caratterizzata dall’essere l’unica soluzione del problema di Cauchy
2
φ′ (x) + αx φ(x) = 0,
d
ˆ i dk
Utilizzando le regole x ↦
,
d
dx
φ(0) = 1.
ˆ ik, la trasformata φˆ soddisfa
↦
1 ˆ
φˆ′ (k) + k φ(k)
= 0,
α
con la condizione
+∞
2
1
1
e−αx /2 dx = √
φ(0) = √ ∫
2π −∞
2π
Perci`
o si ottiene il risultato6
√
+∞
2
2
1
e−y dy = √
∫
α −∞
2π
√
2√
1
π=√ .
α
α
2
1
ˆ
φ(k)
= √ e−k /2α .
α
(3.13)
L’estensione della (3.13) al caso N -dimensionale
φN (x) = e−α∣x∣
2
/2
x ∈ RN ,
,
`e una semplice applicazione del teorema di Fubini; essendo infatti
N
φN (x) e−ik⋅x = ∏ φ1 (xj ) e−ikj xj ,
j=1
si ottiene
N
̂1 (kj ) =
̂N (k) = ∏ φ
φ
j=1
1
αN /2
e−∣k∣
2
/2α
.
(3.14)
2
Osserviamo che che per α = 1 si trova φˆ = φ, ovvero che la funzione e−∣x∣ /2 `e un punto fisso per la
2
trasformazione di Fourier (anzi, per linearit`a, ogni c e−∣x∣ /2 , con c ∈ C, `e un punto fisso).
Abbiamo visto alcune propriet`
a notevoli della trasformazione di Fourier, in particolare quella di
trasformare derivazioni in moltiplicazioni per polinomi, e viceversa. Ora vediamo un’altra interessante propriet`
a: quella di trasformare convoluzioni in prodotti (e viceversa). La convoluzione
f ∗ g di due funzioni f ∶ RN → C e g ∶ RN → C `e formalmente definita da
(f ∗ g)(x) ∶= ∫
6
RN
f (x − y) g(y) dy = ∫
RN
f (y) g(x − y) dy.
In alternativa si poteva anche fare un calcolo diretto della trasformata, utilizzando l’integrale notevole
√
+∞
2
π a2 /4b
e−(aξ+bξ ) dξ =
e
,
a, b ∈ C, Re(b) ≥ 0.
∫
−∞
b
(3.15)
50
CAPITOLO 3. TRASFORMATE DI FOURIER
Proposizione 3.12 Se f, g ∈ L1 (RN ), allora f ∗ g ∈ L1 (RN ), con ∥f ∗ g∥1 ≤ ∥f ∥1 ∥g∥1 , e
cN f̂
∗ g = fˆgˆ.
(3.16)
Dimostrazione Cominciamo col dimostrare che f ∗ g ∈ L1 (RN ):
∥f ∗ g∥1 = ∫
RN
≤∫
∫
RN
∣∫
RN
f (x − y) g(y) dy∣ dx
∣f (x − y)∣ ∣g(y)∣ dy = ∥f ∥1 ∥g∥1 < +∞.
RN
dove, l’ultima uguaglianza `e dovuta al teorema di Tonelli (Teorema A.9). Si ha poi:
(f̂
∗ g)(k) = cN ∫
RN
= cN ∫
∗
= cN ∫
RN
∫
RN
RN
∫
RN
∫
RN
f (x − y) g(y) dy e−ik⋅x dx
f (x − y) g(y) dy e−ik⋅(x−y) e−ik⋅y dx
ˆ
f (x − y) e−ik⋅(x−y) dx g(y) e−ik⋅y dy = c−1
ˆ(k).
N f (k) g
Osseviamo che l’uguaglianza contrassegnata con l’asterisco `e dovuta al teorema di Fubini, essendo
la funzione f (x − y) g(y) e−ik⋅(x−y) e−ik⋅y sommabile su R2N (come sopra dimostrato).
◻
Il “viceversa” di questo risultato lo vedremo un po’ pi`
u avanti (proposizione 3.20).
Esercizio 3.13 Dimostrare che l’operazione di convoluzione fra funzioni L1 (RN ) `e associativa.
3.2
Teoremi di inversione
All’inizio di questo capitolo abbiamo introdotto empiricamente la trasformata di Fourier come
una funzione F (k) che ci permette di esprimere una funzione f (x) mediante la formula (3.3).
Dimostreremo ora che la trasformata di Fourier fˆ(k) `e effettivamente la funzione che assolve questo
compito: dimostreremo cio`e che `e possibile ricostruire una funzione f (x) “antitrasformando” la
sua trasformata fˆ(k). I teoremi di inversione della trasformazione di Fourier servono quindi a
dare un senso alla formula (3.3), esattamente come i teoremi di convergenza della serie di Fourier
servono a dare un senso allo sviluppo (1.1). Analogamente al caso della serie di Fourier, non esiste
un solo teorema di inversione ma una molteplicit`a di risultati che dipendono dalla regolarit`a della
funzione f . Anche in questo caso ci limiteremo a presentare solo alcuni dei risultati pi`
u importanti.
Lemma 3.14 (Approssimazione dell’identit`
a) Sia ϕ continua e limitata su RN e sia fσ ∶
N
R → R una famiglia di funzioni integrabili, dipendenti dal parametro σ > 0, tali che
(1) fσ ≥ 0, per ogni σ > 0;
(2) ∫RN fσ (x) dx = 1, per ogni σ > 0;
(3) limσ→0+ ∫∣x∣>R fσ (x) dx = 0, per ogni R > 0.
Allora si ha
lim ∫
σ→0+
RN
fσ (x − y) ϕ(y) dy = ϕ(x).
(3.17)
3.2. TEOREMI DI INVERSIONE
51
Dimostrazione Scriviamo, per un generico R > 0,
∫
∫
∣y∣≤R
fσ (x − y) ϕ(y) dy = ∫
RN
RN
fσ (y) ϕ(x) dy + ∫
∣y∣≤R
fσ (y) ϕ(x − y) dy =
fσ (y) [ϕ(x − y) − ϕ(x)] dy + ∫
∣y∣>R
fσ (y) ϕ(x − y) dy
Fissato > 0, per la continuit`
a di ϕ in x, esiste R > 0 tale che ∣ϕ(x − y) − ϕ(x)∣ ≤ /3 per ogni
∣y∣ ≤ R e perci`
o, con questa scelta di R, si ha
∣∫
∣y∣≤R
fσ (y) [ϕ(x − y) − ϕ(x)] dy∣ ≤
3
dove si `e sfruttata anche la propriet`
a (2). Poich´e inoltre ϕ `e limitata, grazie alla propriet`a (3)
esister`
a σ1 tale che
∣∫
∣y∣>R
fσ (y) ϕ(x − y) dy∣ ≤
,
3
per ogni 0 < σ < σ1 .
Infine, per le propriet`
a (2) e (3), esister`a σ2 < σ1 tale che
∣1 − ∫
∣y∣≤R
fσ (y) dy∣ = ∣ ∫
∣y∣>R
fσ (y) dy∣ ≤
,
3
per ogni 0 < σ < σ2 .
Si ha dunque che, per ogni fissato > 0 esiste σ sufficientemente piccolo tale che
∣∫
RN
+∣ ∫
∣y∣≤R
fσ (x − y) ϕ(y) dy − ϕ(x)∣ ≤ ∣ϕ(x)∣ ∣1 − ∫
fσ (y) [ϕ(x − y) − ϕ(x)] dy∣ + ∣ ∫
∣y∣>R
∣y∣≤R
fσ (y) dy∣
fσ (y) ϕ(x − y) dy∣ < ,
◻
il che dimostra il limite (3.17).
Una famiglia di funzioni con le propriet`a (1), (2) e (3) del lemma precedente `e detta approssimazione dell’identit`
a.
Lemma 3.15 La famiglia di curve gaussiane
gσ (x) ∶=
2
2
1
e−∣x∣ /2σ ,
2
N
/2
(2πσ )
σ > 0.
(3.18)
`e un’approssimazione dell’identit`
a.
Dimostrazione La propriet`
a (1) del Lemma 3.14 `e evidente. Utilizzando il teorema di Fubini e
√
2
+∞
l’integrale notevole ∫−∞ e−ξ dξ = π si ottiene poi
∫
RN
e−∣x∣
2
/2σ 2
N
dx = ∏ ∫
i=1
+∞
−∞
N
e−xi /2σ dxi = ∏
2
2
i=1
√
2σ 2 ∫
+∞
−∞
e−ξ dξ = (2πσ 2 )N /2
2
+∞
e perci`
o ∫−∞ gσ (x) dξ = 1 (propriet`
a (2)). Infine, per dimostrare la propriet`a (3) basta osservare
che, per ogni fissato R > 0, si ha
∫
∣x∣>R
gσ (x) dx =
2
1
e−∣z∣ /2 dz,
∫
N
/2
∣z∣>R/σ
(2π)
che chiaramente tende a 0 per σ → 0+ .
◻
Possiamo ora dimostrare il primo teorema di inversione, che riguarda le funzioni di Schwartz.
Ricordiamo che se f ∈ S(RN ) allora fˆ ∈ S(RN ).
52
CAPITOLO 3. TRASFORMATE DI FOURIER
Teorema 3.16 Se f ∈ S(RN ) si ha
f (x) = cN ∫
RN
fˆ(k) eik⋅x dk
(3.19)
per ogni x ∈ RN .
Dimostrazione Per ogni x ∈ Rn e per ogni α > 0, la funzione
(k, y) ↦ c2N ei(x−y)⋅k f (y) e−α
∣k∣2 /2
2
`e integrabile su R2N e perci`
o possiamo applicare il teorema di Fubini ed eseguire l’integrale su
R2N di tale funzione in due modi: rispetto a y e poi rispetto a k e viceversa. Si ottiene cos`ı
l’uguaglianza
cN ∫
RN
2
2
fˆ(k) eik⋅x e−α ∣k∣ /2 dk = cN ∫
2 ∣k∣ /2
̂
[e−α
](y − x) f (y) dy.
2
RN
Come abbiamo visto nell’esempio 3.11, la trasformata di e−α
2
2 ∣k∣ /2
̂
](x) =
[e−α
2
∣k∣2
`e data da
1 −∣x∣2 /2α2
e
= c−1
N gα (x)
αN
e quindi
cN ∫
RN
2
2
fˆ(k) eik⋅x e−α ∣k∣ /2 dk = ∫
RN
gα (x − y) f (y) dy.
Passando al limite per α → 0+ (con il teorema della convergenza dominata) e utilizzando i due
lemmi precedenti si ottiene
cN ∫ fˆ(k) eik⋅x dk = f (x).
RN
◻
Introduciamo la notazione F ∶ S(RN ) → S(RN ), F ∶ f ↦ fˆ per indicare la trasformazione di
Fourier sullo spazio di Schwartz. Posto
(F ∗ f ) (x) ∶= cN ∫
RN
f (k) eik⋅x dk
(3.20)
il teorema precedente ci dice che F ∗ F = I. Inoltre, posto
(Jf ) (x) ∶= f (−x)
(3.21)
e osservato che F e F ∗ sono legate dalla semplice relazione
F ∗ = FJ = JF ,
(3.22)
si ha anche
FF ∗ = F J F = F ∗ F
e quindi FF ∗ = I. Pertanto F `e una corrispondenza biunivoca di S(RN ) in s´e e F ∗ `e la sua
inversa:
F ∗ = F −1 .
(3.23)
La trasformazione F ∗ prende il nome di trasformazione di Fourier inversa e la funzione F ∗ f `e
detta antitrasformata di f .
Esercizio 3.17 Verificare che
F 2 = J,
F 3 = F ∗,
F4 = I
(analogamente al ciclo dell’unit`
a immaginaria: i2 = −1, i3 = −i, i4 = 1).
(3.24)
3.2. TEOREMI DI INVERSIONE
53
Enunciamo ora, senza dimostrazione, due ulteriori teoremi di inversione. Il primo ci dice che la
(3.19) vale (quasi ovunque) anche per funzioni L1 , nell’ipotesi che anche fˆ sia una funzione L1 .
Teorema 3.18 Se f e fˆ stanno entrambe in L1 (RN ) allora vale la (3.19) per quasi ogni x ∈ RN .
Corollario 3.19 Se f ∈ L1 (RN ) e fˆ ∈ S(RN ), allora f ∈ S(RN ) (nel senso che f `e uguale quasi
ovunque a una funzione di Schwartz).
Dimostrazione Poich´e fˆ ∈ S(RN ), si ha F ∗ fˆ ∈ S(RN ). Ma per il Teorema 3.18 si ha che F ∗ fˆ = f
quasi ovunque.
◻
Come prima applicazione di questi risultati dimostriamo un altro teorema sulle convoluzioni, che
`e un il viceversa della Proposizione 3.12, almeno per funzioni di Schwartz.
Proposizione 3.20 Se f, g ∈ S(RN ), allora f ∗ g ∈ S(RN ) e
f̂g = cN fˆ ∗ gˆ .
(3.25)
ˆ ˆ ∈ S(RN ), e dunque f ∗ g ∈
Dimostrazione Dalla Proposizione 3.12 sappiamo che f̂
∗ g = c−1
N fg
N
S(R ) per il corollario precedente. Inoltre, poich´e (come si pu`o facilmente verificare) la (3.16)
vale anche per le antitrasformate,
cN F ∗ (f ∗ g) = F ∗ f F ∗ g,
riscrivendo questa identit`
a per fˆ e gˆ al posto di f e g si ottiene cN F ∗ (fˆ ∗ gˆ) = f g e da questa,
applicando F ad ambo i membri, si ottiene la (3.25).
◻
Un altro teorema di inversione che enunciamo senza dimostrazione `e l’analogo del teorema di
convergenza puntuale 1.4 visto per le serie di Fourier (anche la dimostrazione `e simile) e vale solo
nel caso unidimensionale.
Teorema 3.21 Se f appartiene a L1 (R) ed `e regolare a tratti7 allora esiste il limite
lim ∫
R→+∞
+R
−R
fˆ(k) eikx dk =∶ vp ∫
+∞
−∞
fˆ(k) eikx dk
(3.26)
(detto “valore principale” dell’integrale) e si ha
+∞
1
f + (x) + f − (x)
√
vp ∫
fˆ(k) eikx dk =
2
−∞
2π
(3.27)
per ogni x ∈ R (dove f + (x) e f − (x) indicano i limiti destro e sinistro di f nel punto x).
+∞
+∞
Osserviamo che se fˆ ∈ L1 (R) allora vp ∫−∞ fˆ(k) eikx dk = ∫−∞ fˆ(k) eikx dk.
Osservazione 3.22 Riscriviamo la fomula di inversione (3.19) esplicitamente
f (x) =
1
ik⋅x
−ik⋅y
dy dk.
∫ e
∫ N f (y) e
(2π)N RN
R
Notiamo che non si pu`
o applicare il teorema di Fubini: questo non `e l’integrale su R2N della
−ik⋅y ik⋅x
funzione f (k) e
e
(perch´e questa non `e sommabile) e quindi gli integrali vanno fatti nell’ordine indicato. Tuttavia, se potessimo applicare il teorema di Fubini invertendo l’ordine delle
integrazioni si otterrebbe l’espressione:
f (x) =
7 Vedi
1
ik⋅(x−y)
dk f (y) dy
∫ ∫ e
(2π)N RN RN
nota a pag. 4. Attenzione: qui non si richiede la continuit`
a di f .
54
CAPITOLO 3. TRASFORMATE DI FOURIER
da cui si vede che la “funzione”
δ(x) =
1
ik⋅x
dk
∫ e
(2π)N RN
ha la propriet`
a di una “delta di Dirac”, ovvero la sua convoluzione con una funzione riproduce la
funzione stessa:
∫ δ(x − y) f (y) dy = f (x).
RN
Queste considerazioni saranno inquadrate correttamente nell’ambito della teoria delle distribuzioni
che vedremo nel prossimo capitolo.
3.3
Trasformata di Fourier di funzioni L2
Anche nella teoria delle trasformate di Fourier, come in quella delle serie, lo spazio L2 `e un
importante protagonista. Il motivo risulta chiaro dal risultato seguente che `e, per le trasformate,
l’analogo del teorema di Parseval (eq. (1.16)) per le serie.
Lemma 3.23 Se f, g ∈ S(RN ), allora ⟨f, g⟩ = ⟨fˆ, gˆ⟩. In particolare, ∥f ∥2 = ∥fˆ∥2 .
Dimostrazione Il lemma `e una semplice conseguenza del teorema di inversione 3.16 e del teorema
di Fubini. Si ha infatti:
⟨f, g⟩ = ∫
= cN ∫
RN
RN
f (x) g(x) dx = cN ∫
fˆ(k) ∫
RN
RN
∫
RN
g(x) eik⋅x dx dk = ∫
RN
fˆ(k) eik⋅x dk g(x) dx
fˆ(k) gˆ(x) dx = ⟨fˆ, gˆ⟩
◻
Questo semplice ma importante risultato ci permette di estendere la trasformazione di Fourier a
tutte le funzioni L2 .
Teorema 3.24 La trasformazione di Fourier F ∶ S(RN ) → S(RN ), f ↦ fˆ, si estende in modo
unico ad una isometria di L2 (RN ) in s´e.
Dimostrazione Sia f ∈ L2 (RN ). Allora, poich´e S(RN ) `e denso in L2 (RN ), esiste una successione
di funzioni fn ∈ S(RN ) tale che fn → f nello spazio L2 (RN ). Poich´e la successione fn `e convergente,
allora sar`
a anche di Cauchy in L2 (RN ), cio`e per ogni > 0 esister`a n tale che ∥fn − fm ∥2 < per
ogni n, m ≥ n . Ma per il teorema precedente si ha
∥fn − fm ∥2 = ∥fˆn − fˆm ∥2
e quindi anche fˆn `e una successione di Cauchy in L2 (RN ). Poich´e lo spazio L2 (RN ) `e completo,
esister`
a un elemento di L2 (RN ), che chiameremo Ff , tale che
lim ∥fˆn − Ff ∥2 = 0.
n→+∞
Dunque, ad ogni f ∈ L2 (RN ) possiamo associare, con il procedimento al limite appena descritto,
un elemento Ff ∈ L2 (RN ): tale elemento sar`a, per definizione, la trasformata di Fourier di f
e l’applicazione F ∶ L2 (RN ) → L2 (RN ), f ↦ Ff , sar`a detta trasformazione di Fourier. Si pu`o
verificare facilmente che:
• la definizione di Ff non dipende dalla successione approssimante scelta;
3.3. TRASFORMATA DI FOURIER DI FUNZIONI L2
55
• F `e lineare;
• F `e un’isometria, ovvero
⟨f, g⟩ = ⟨fˆ, gˆ⟩,
∀ f, g ∈ L2 (RN )
(3.28)
(Teorema di Plancherel);
• F `e invertibile;8
′
• se F ′ ∶ L2 (RN ) → L2 (RN ) `e una trasformazione lineare e continua tale che F∣S(R
N ) = F∣S(RN ) ,
′
allora F = F (in questo senso l’estensione `e unica).
◻
Il seguente teorema assicura la consistenza della precedente definizione con la definizione (3.4)
nel caso di funzioni che sono L2 e anche L1 . Ove sia possibile applicare entrambe le definizioni,
denotiamo con Ff la trasformata di Fourier in L2 definita dal precedente teorema e con fˆ la
trasformata di Fourier in senso L1 , ovvero definita dall’integrale (3.4).
Lemma 3.25 Se f ∈ L2 (RN ) ha supporto compatto, allora (Ff ) (k) = fˆ(k) per q.o. k ∈ RN .
Dimostrazione Sia Ω un aperto limitato contenente il supporto di f e sia gn una successione di
funzioni in C0∞ (Ω) che approssimano f in L2 (Ω) (e quindi anche in L2 (RN )). Allora, ricordando
l’osservazione A.6, f ∈ L1 (Ω) e gn → f in senso L1 , il che implica (per la (3.5)) che gˆn (x) → fˆ(k)
uniformemente in Ω. Dunque, essendo Ω limitato, gˆn → fˆ in L2 . Ma, per definizione, gˆn → Ff in
L2 e quindi Ff = fˆ quasi ovunque.
◻
Teorema 3.26 Se f ∈ L2 ∩L1 (RN ), allora (Ff ) (k) = fˆ(k) per q.o. k ∈ RN .
Dimostrazione Per ogni R > 0 sia
⎧
⎪
⎪f (x), se ∣x∣ ≤ R,
fR (x) = ⎨
⎪
se ∣x∣ > R.
⎪
⎩0,
Per il precedente Lemma si ha fˆR = FfR q.o. in RN . Dal teorema della convergenza dominata
segue che, per R → ∞, fR converge a f sia in norma L1 che in norma L2 . Di conseguenza:
(i) per la (3.5) si ha che fˆR (k) → fˆ(k) uniformemente;
(ii) per il lemma precedente e per la continuit`a di F si ha che fˆR = FfR → Ff in senso L2 .
Si pu`
o dimostrare (si veda [10] Teorema 3.12) che allora esiste una sottosuccessione fˆRn che
converge a Ff puntualmente quasi ovunque. Ma, per il punto (i), ogni sottosuccessione di fˆR
converge puntualmente a fˆ e dunque possiamo concludere che Ff = fˆ quasi ovunque.
◻
Notiamo che come altra conseguenza del Lemma 3.25 vale il seguente risultato.
Corollario 3.27 Se f ∈ L2 (RN ) si ha
(Ff ) (k) = lim ∫
R→∞
∣x∣≤R
e−ik⋅x f (x) dx,
(3.29)
dove il limite `e da intendrsi nella norma L2 .
8 Si pu`
o dedurre da linearit`
a e isometricit`
a, il che `
e facile a dimensione finita ma richiede un po’ pi`
u di lavoro
in dimensione infinita. Altrimenti basta estendere F ∗ da S(RN ) a L2 (RN ), con la stessa procedura, dopodich´
e`
e
facile mostrare che F ∗ `
e l’inversa di F .
56
CAPITOLO 3. TRASFORMATE DI FOURIER
Dimostrazione Per il Lemma 3.25 si ha fˆR = FfR e, per la continuit`a di F, si ha fˆR → Ff in
L2 (RN ) per R → ∞. Scrivendo esplicitamente questo limite si ottiene la (3.29).
◻
Una volta visto che le trasformate in senso L1 e
in entranbi gli spazi, si usa adottare la notazione
che per tali funzioni, in generale, l’integrale (3.4)
in senso L2 coincidono per funzioni che stanno
fˆ anche per funzioni L2 , tenendo per`o presente
non ha senso (mentre ha senso il limite (3.29)).
Esempio 3.28 La trasformata della funzione
⎧
⎪
⎪1, per −1 ≤ x ≤ 1,
rect(x) ∶= ⎨
⎪
⎪
⎩0, altrimenti.
√
√
2
2 sin k
`e
sinc(k)
=
(vedi Esempio 3.4). Questo `e un esempio di funzione L1 (R) la cui
π
π k
trasformata non sta in L1 (R) poich´e, infatti, si ha
∫
+∞
−∞
∣
sin k
∣dk = +∞.
k
Naturalmente, essendo rect ∈ L (R), la sua trasformata deve stare in L2 (R), e infatti risulta
2
∫
+∞
−∞
∣
sin k 2
∣ dk < +∞.
k
Questo significa che alla funzione sinc non pu`o essere applicata la trasformazione (o l’anti-trasformazione)
di Fourier in senso L1 mentre pu`
o essere applicata quella in senso L2 . Chiaramente, essendo la
√
trasformazione biunivoca su L2 (R), risulter`a F ∗ (sinc) = π2 rect e tale formula va interpretata
come
R
sin k
lim ∫ eikx
dk = π rect(x),
(3.30)
R→∞ −R
k
dove il limite `e inteso in L2 (R) (Corollario 3.27). Per di pi`
u, essendo rect ∈ L1 (R) e regolare a
tratti, possiamo applicare il Teorema 3.21 e concludere che il limite (3.30) pu`o essere inteso anche
in senso puntuale, almeno nei punti in cui rect `e continua. In particolare, per x = 0 si otterr`a il
limite notevole
R sin k
dk = π.
(3.31)
lim ∫
R→∞ −R
k
3.4
Soluzione di equazioni alle derivate parziali
Vediamo ora alcuni esempi di utilizzo delle trasformate di Fourier per risolvere equazioni alle
derivate parziali. Poich´e la trasformazione di Fourier agisce su funzioni definite su RN , si noter`a
che il metodo `e particolarmente adatto a problemi il cui dominio spaziale `e l’intero RN .
3.4.1
Equazioni del trasporto e dal calore
Consideriamo il problema ai valori iniziali per l’equazione del trasporto
⎧
⎪
⎪ ut (x, t) + v ⋅ ∇u(x, t) = 0,
⎨
⎪
⎪
⎩ u(x, 0) = ϕ(x),
x ∈ R, t > 0,
x ∈ R,
(3.32)
dove v ∈ RN `e un vettore fissato e ϕ `e un dato iniziale fissato. Sia u
ˆ(k, t) la trasformata di u(x, t)
rispetto a x. Il corrispondente problema per u
ˆ `e il seguente:
⎧
⎪
ˆt (k, t) + iv ⋅ k u
ˆ(k, t) = 0,
⎪u
⎨
⎪
ˆ(k, 0) = ϕ(k),
ˆ
⎪
⎩u
k ∈ R, t > 0,
k ∈ R,
3.4. SOLUZIONE DI EQUAZIONI ALLE DERIVATE PARZIALI
57
e dunque (ricordando la propriet`
a (3.7))
̂
u
ˆ(k, t) = e−itv⋅k ϕ(k)
ˆ
=T
tv ϕ (k).
Antitrasformando, si trova perci`
o
u(x, t) = ϕ(x − vt).
(3.33)
Consideriamo ora il problema ai valori iniziali per l’equazione del calore
⎧
⎪
⎪ ut (x, t) = c∆u(x, t),
⎨
⎪
⎪
⎩ u(x, 0) = ϕ(x),
x ∈ RN , t > 0,
x ∈ RN ,
(3.34)
dove c > 0 `e una costante fissata e ϕ `e un dato iniziale fissato. Come sopra, sia u
ˆ(k, t) la trasformata
di u(x, t) rispetto a x; per u
ˆ il problema diventa
2
⎧
⎪
ˆt (k, t) = −c∣k∣ u
ˆ(k, t),
⎪u
⎨
⎪
ˆ(k, 0) = ϕ(k),
ˆ
⎪
⎩u
k ∈ R, t > 0,
k ∈ R,
e dunque
u
ˆ(k, t) = e−ct∣k∣ ϕ(k).
ˆ
2
Per antitrasformare occorre ricordare la (3.25) (che vale anche per l’antitrasformata), per cui si
ha (con qualche abuso di notazione)
u(x, t) = cN ((F ∗ e−ct∣k∣ ) ∗ ϕ) (x)
2
L’antitrasformata F ∗ e−ct∣k∣ di e−ct∣k∣ si calcola facilmente usando la (3.14) (con α = 2ct) e F ∗ =
JF:
2
2
2
1
e−∣x∣ /4ct .
F ∗ e−ct∣k∣ = JFe−ct∣k∣ =
N
/2
(2ct)
2
2
Dunque
u(x, t) =
=
cN
−∣x−y∣2 /4ct
ϕ(y) dy
∫ e
(2ct)N /2 RN
1
−∣x−y∣2 /4ct
ϕ(y) dy
∫ Ne
N
/2
R
(4πct)
che scriviamo
u(x, t) = ∫
RN
Γt (x − y) ϕ(y) dy,
(3.35)
dove (ricordando anche la definizione (3.18))
Γt (x) =
2
1
e−∣x∣ /4ct = g√2ct (x)
(4πct)N /2
(3.36)
`e detta soluzione fondamentale dell’equazione del calore.
3.4.2
Equazione delle onde
Consideriamo il problema ai valori iniziali per l’equazione delle onde
⎧
⎪
utt (x, t) = c2 ∆u(x, t),
⎪
⎪
⎪
⎪
⎨ u(x, 0) = ϕ(x),
⎪
⎪
⎪
⎪
⎪
⎩ ut (x, 0) = ψ(x),
x ∈ R, t > 0,
x ∈ R,
x∈R
(3.37)
58
CAPITOLO 3. TRASFORMATE DI FOURIER
dove c > 0 `e una costante fissata e ϕ , ψ sono i dati iniziali. Procedendo come negli esempi
precedenti otteniamo il problema per u
ˆ(k, t)
2
⎧
u
ˆtt (k, t) = −c2 ∣k∣ u
ˆ(k, t),
⎪
⎪
⎪
⎪
⎪
ˆ(k, 0) = ϕ(k),
ˆ
⎨u
⎪
⎪
⎪
⎪
ˆ
⎪
ˆt (k, 0) = ψ(k),
⎩u
k ∈ R, t > 0,
k ∈ R,
k ∈ R.
La soluzione generica dell’equazione differenziale `e
u
ˆ(k, t) = A(k) eic∣k∣t + B(k) e−ic∣k∣t .
(3.38)
Imponendo le condizioni iniziali si ottiene
⎧
A(k) + B(k) = ϕ(k),
ˆ
⎪
⎪
⎪
⎪
⎨
ˆ
ψ(k)
⎪
⎪
A(k) − B(k) =
,
⎪
⎪
ic∣k∣
⎩
e dunque
u
ˆ(k, t) = ϕ(k)
ˆ
Ô⇒
⎧
⎪
⎪
⎪
A(k) =
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
B(k) =
⎪
⎪
⎪
⎩
ˆ
ψ(k)
1
(ϕ(k)
ˆ
+
),
2
ic∣k∣
ˆ
1
ψ(k)
(ϕ(k)
ˆ
−
),
2
ic∣k∣
eic∣k∣t + e−ic∣k∣t ˆ
eic∣k∣t − e−ic∣k∣t
+ ψ(k)
2
2ic∣k∣
(3.39)
sin(c∣k∣t)
ˆ
= ϕ(k)
ˆ
cos(c∣k∣t) + ψ(k)
.
c∣k∣
Adesso, per trovare la soluzione u(x, t), dovremmo applicare la trasformazione di Fourier inversa
a quest’ultima espressione, il che implicherebbe antitrasformare le funzioni cos(c∣k∣t) e sin(c∣k∣t)
,
∣k∣
1
2
che non sono n´e di classe L n´e di classe L . Ci troviamo perci`o in una difficolt`a che si potr`a
superare solo con un’opportuna estensione del concetto di trasformazione di Fourier, estensione di
cui ci occuperemo nel capitolo successivo (in particolare riprenderemo l’equazione delle onde nel
paragrafo 4.6). Tuttavia, a dimensione N = 1 riusciamo ad eseguire l’antitrasformazione fin d’ora.
Infatti, in questo caso, ∣k∣ `e semplicemente il valore assoluto della variabile scalare k e la (3.39) si
pu´
o riscrivere
eickt − e−ickt
eickt + e−ickt ˆ
+ ψ(k)
u
ˆ(k, t) = ϕ(k)
ˆ
2
2ick
= ϕ(k)
ˆ
eickt + e−ickt ˆ
1 t
+ ψ(k) ∫ eicks ds
2
2 −t
ovvero, ricordando la (3.7),
1 ̂
1 t̂
̂
[T−ct ϕ (k) + T
+ct ϕ (k)] +
∫ T−cs ψ (k) ds.
2
2 −t
Pertanto otteniamo la soluzione dell’equazione delle onde unidimensionale
u
ˆ(k, t) =
u(x, t) =
1
1 t
[ϕ(x + ct) + ϕ(x − ct)] + ∫ ψ(x + cs) ds
2
2 −t
x+ct
1
1
= [ϕ(x + ct) + ϕ(x − ct)] +
ψ(y) dy,
∫
2
2c x−ct
nota come formula di D’Alembert.
(3.40)
Tornando ora al caso N -dimensionale, analogamente a quanto fatto nel paragrafo 1.2 per la corda
vibrante di lunghezza finita, studiamo l’energia9 associata al sistema (3.37)
E(t) =
9 Per
1
2
2
2
∫ (u (x, t) + c ∣∇u(x, t)∣ ) dx.
2 RN t
la precisione, E(t) definita in (3.41) `
e una quantit`
a proporzionale all’energia.
(3.41)
3.4. SOLUZIONE DI EQUAZIONI ALLE DERIVATE PARZIALI
59
Applicando il Teorema di Plancherel ∥f ∥2 = ∥fˆ∥2 e la formula (3.39) possiamo scrivere
∫
2
RN
2
(∣ˆ
u2t (k, t)∣ + c2 ∣k∣ ∣ˆ
u(k, t)∣ ) dk
2
=∫
RN
cos(c∣k∣t)
2 ˆ
∣ck∣ ∣ψ(k)
− ϕ(k)
ˆ
sin(c∣k∣t)∣ dk
c∣k∣
2
2
sin(c∣k∣t)
+ ϕ(k)
ˆ
cos(c∣k∣t)∣ dk
c∣k∣
+∫
ˆ
∣ck∣ ∣ψ(k)
=∫
2
ˆ
2 ⎛ ∣ψ(k)∣
∣ck∣
2
RN
RN
⎝ ∣ck∣
2⎞
+ ∣ϕ(k)∣
ˆ
⎠
dk = ∫
2
RN
2
2
ˆ
(∣ψ(k)∣
+ ∣ck∣ ∣ϕ(k)∣
ˆ
) dk.
Dunque, come nel caso della corda vibrante finita, si ha E(t) = E(0) =∶ E, ovvero l’energia rimane
costante nel tempo, e si ha
E=
2
1
2
2
ˆ
+ ∣ck∣ ∣ϕ(k)∣
ˆ
) dk
∫ N (∣ψ(k)∣
2 R
(3.42)
che `e l’analogo dell’espressione (1.39) ottenuta per la corda vibrante finita. Applicando di nuovo
il Teorema di Plancherel si ottiene infine
E=
1
2
2
2
∫ (ψ (x) + c ∣∇ϕ(x)∣ ) dx.
2 RN
(3.43)
Un’altra rappresentazione dell’energia la otteniamo dalla forma (3.38) della soluzione trasformata.
Poich´e u `e reale, si deve avere u
ˆ(k, t) = u
ˆ(−k, t), da cui segue
A(k) e−ic∣k∣t + B(k) eic∣k∣t = A(−k) eic∣k∣t + B(−k) e−ic∣k∣t
(per ogni t ∈ R), il che implica
A(k) = B(−k).
Dunque, poich´e
⎧
⎪
⎪ ϕˆ = A + B,
⎨
ˆ
⎪
⎪
⎩ ψ = i∣ck∣ (A − B) ,
Ô⇒
2
⎧
⎪
⎪ ∣ϕ∣ = [AA + BB + 2 Re(AB)] ,
⎨ 2
2
⎪
⎪
⎩ ∣ψ∣ = ∣ck∣ [AA + BB − 2 Re(AB)] ,
si ha dalla (3.42)
E=
=
2
1
1
2
2
2
ˆ
+ ∣ck∣ ∣ϕ(k)∣
ˆ
) dk = ∫ ∣ck∣ (AA + BB) (k) dk
∫ (∣ψ(k)∣
2 RN
2 RN
1
2
2
2
2
2
∫ ∣ck∣ (∣A(k)∣ + ∣A(−k)∣ ) dk = ∫ N ∣ck∣ ∣A(k)∣ dk,
2 RN
R
che esprime l’energia in funzione del solo coefficiente A(k).
3.4.3
Equazione di Schr¨
odinger per la particella libera
Nel paragrafo 2.4 abbiamo introdotto alcuni postulati della meccanica quantistica per quanto
riguarda, essenzialmente, i problemi stazionari. Introduciamo ora un quinto postulato che invece
riguarda la dinamica dei sistemi quantistici:
60
CAPITOLO 3. TRASFORMATE DI FOURIER
Postulato 5. l’evoluzione della funzione d’onda ψ(x, t), (x, t) ∈ R3 × R, di una particella
quantistica con Hamiltoniana H `e determinata dall’equazione di Schr¨
odinger
̵ t = Hψ,
ihψ
ovvero, pi`
u esplicitamente,
̵ ψt (x, t) = −
ih
̵2
h
∆ψ(x, t) + V (x)ψ(x, t).
2m
(3.44)
Vogliamo ora studiare l’equazione (3.44) nel pi`
u semplice caso possibile ovvero il caso della
particella libera, corrispondente a V = 0 (e lo studiamo in RN per maggiore generalit`a).
Consideriamo quindi il problema ai valori iniziali
⎧
⎪
⎪ iψt (x, t) = −α∆ψ(x, t),
⎨
⎪
⎪
⎩ ψ(x, 0) = ψ0 (x),
x ∈ RN , t ∈ R,
x ∈ RN ,
(3.45)
̵
ˆ t) la
dove si `e posto α = h/2m
e ψ0 ∈ L2 (RN , C) `e un dato iniziale fissato. Al solito, sia ψ(k,
trasformata di Fourier di ψ rispetto a x, per la quale il problema diviene
2ˆ
⎧
⎪
t),
⎪ iψˆt (k, t) = α∣k∣ ψ(x,
⎨
⎪
ˆ
ˆ
⎪
⎩ ψ(k, 0) = ψ0 (k),
k ∈ RN , t ∈ R,
k ∈ RN ,
che ha soluzione
ˆ t) = e−iα∣k∣2 t ψˆ0 (k).
ψ(k,
2
La funzione e−iα∣k∣ t ψˆ0 (k) non `e una Gaussiana ma procediamo formalmente come se lo fosse,
riscrivendo la soluzione (3.35) dell’equazione del calore con un “coefficiente di diffusione” complesso
iα. Si ottiene cos`ı la soluzione
ψ(x, t) = ∫
dove
Σt (x) =
RN
Σt (x − y) ψ0 (y) dy,
(3.46)
2
1
ei∣x∣ /4αt .
N
/2
(4πiαt)
(3.47)
Nonostante l’analogia formale fra la soluzione dell’equazione del calore u(t) = Γt ∗ u0 e la soluzione
dell’equazione di Schr¨
odinger ψ(t) = Σt ∗ ψ0 , le due soluzioni hanno propriet`a completamente
diverse. Confrontiamo ad esempio l’evoluzione della norma L2 , il che si fa molto semplicemente
utilizzando il teorema di Plancherel (3.28). Per la u si ha
2
2
∥u(t)∥2 = ∥ˆ
u(t)∥2 = ∫
RN
2
∣e−c∣k∣ t u
ˆ0 (k)∣ dk,
2
che tende a 0 per t → +∞ (dal teorema della convergenza dominata). Per la ψ si ha invece
2
2
ˆ
∥ψ(t)∥2 = ∥ψ(t)∥
2 =∫
2
RN
2
2
2
∣e−iα∣k∣ t ψˆ0 (k)∣ dk = ∥ψˆ0 ∥2 = ∥ψ0 ∥2 ,
e dunque la norma L2 si conserva. Ricordando che le funzioni d’onda sono vettori unitari di L2
2
(in quanto ∣ψ(x)∣ ha il significato fisico di densit`a di probabilit`a), questo risultato ci mostra che
le propriet`
a matematiche dell’equazione di Schr¨odinger (almeno nel caso della particella libera che
stiamo esaminando), sono coerenti con i postulati fisici.
Notiamo inoltre che la (3.46) `e ben definita anche per t < 0, il che significa che l’equazione di
Schr¨
odinger ha un carattere reversibile, cosa che non `e vera per l’equazione del calore.
3.5. IL TEOREMA DEL CAMPIONAMENTO
61
Consideriamo ora il caso N = 1 e studiamo l’evoluzione del dato iniziale
ψ0 (x) = √
4
1
2πσ 2
eixk0 e−x
2
/4σ 2
2
con σ > 0 e k0 ∈ R parametri fissati (si noti che ∣ψ0 (x)∣ `e una Gaussiana). Sostituendo nella
(3.46), si ha
ix2
+∞
c e 4αt
ix
1
i
ψ(x, t) = √
exp [− (
− ik0 ) y − ( 2 −
) y 2 ] dy,
∫
2αt
4σ
4αt
4πiαt −∞
√
4
dove si `e posto c = 1/ 2πσ 2 . Questo `e un integrale notevole del tipo riportato nella nota 6 a pag.
49, con
ix
1
i
a=
− ik0 ,
b= 2 −
,
2αt
4σ
4αt
da cui si ricava
ix2
cσ e 4αt
σ 2 (x − 2αk0 t)2
ψ(x, t) = √
exp [−
]
4αt(αt − iσ 2 )
αt − iσ 2
¿
2
ix2 Á αt + iσ
σ 2 (x − 2αk0 t)2 (αt + iσ 2 )
À
= cσ e 4αt Á
exp [−
]
2
4
(αt) + σ
4αt((αt)2 + σ 4 )
¿
ix2
2
2
2
e 4αt Á
Á
À αt + iσ exp [− (x − 2αk0 t) (αt + iσ ) ] , (3.48)
= √
4
σσt2
4αtσt2
2π
dove si `e posto
σt2 =
σ 4 + (αt)2
(αt)2
2
=
σ
(1
+
).
σ2
σ4
(3.49)
Per capire meglio il significato fisico di questa soluzione consideriamone il quadrato del modulo,
ovvero la densit`
a di probabilit`
a ad essa associata. Si ottiene facilmente
2
∣ψ(x, t)∣ = √
1
2πσt2
e−(x−2αk0 t)
2
/2σt2
,
(3.50)
̵ 0 /m e si allarga
da cui si vede che la distribuzione Gaussiana iniziale trasla con velocit`a 2αk0 = hk
con un fattore di proporzionalit`
a pari a
√
√
̵
2
σt
(αt)2
ht
= 1+
= 1+(
) .
4
2
σ
σ
2mσ
Possiamo valutare che l’allargamento del pacchetto d’onde diventi sensibile sulla scala di tempo
̵
ht
mσ 2
t per cui mσ
2 ∼ 1, ovvero per t ∼
̵ . Per una particella “macroscopica”, di massa m = 0.1 µg
h
(= 10−10 Kg) e confinata in σ = 0.1 mm, tale scala di tempo risulta pari a 1016 s (l’et`a stimata
dell’universo `e 1017 s); invece per un elettrone, di massa me = 9.1 × 10−31 Kg e confinato in σ = 1˚
A
(= 10−10 m), tale scala di tempo `e pari a soltanto 10−16 s (Figura 3.2).
3.5
Il teorema del campionamento
Concludiamo gli esempi di utilizzo delle trasformate di Fourier con una celebre applicazione alla
teoria dell’informazione, con importanti ricadute sulle moderne tecniche di digitalizzazione. Si
tratta del teorema del campionamento, che nella versione moderna `e dovuto a Claude Shannon
62
CAPITOLO 3. TRASFORMATE DI FOURIER
Figura 3.2: Grafico di ∣ψ(x, t)∣2 , dato dalla (3.50), per una particella di massa me = 9.1 × 10−31 Kg, con
σ = 1˚
A e k0 = 0. L’unit`
a di misura della lunghezza `e di 1˚
A e quella del tempo `e di 1 fs (= 10−15 s). Se k0
non `e nullo, il pacchetto d’onde, oltre ad allargarsi, trasla con velocit`
a uniforme.
(1916–2001), il matematico e ingegnere statunitense che `e considerato il padre della teoria dell’informazione. Il risultato, in realt`
a, era gi`a stato implicitamente ottenuto dal fisico statunitense (di
origine svedese) Harry Nyquist (1889–1976), e per questo motivo `e noto anche come “teorema di
Nyquist-Shannon”.
Consideriamo f ∈ L2 (R) tale che supp(fˆ) ⊂ [−k0 , k0 ] per un certo k0 > 0 (una f siffatta si dice a
banda limitata). Se α ≥ k0 possiamo scrivere, per ogni k ∈ (−α, α),
nπ
nπ
fˆ(k) = ∑ fˆn ei α k = ∑ fˆ−n e−i α k ,
n∈Z
n∈Z
dove la convergenza della serie `e in L2 ([−k0 , k0 ]) e il coefficiente di Fourier `e dato da
√
α
∞
1
1
nπ
2π
i nπ
i nπ
k
k
ˆ
ˆ
ˆ
α
α
f (k) e
f−n =
dk =
dk =
f ( ).
∫ f (k) e
∫
2α −α
2α −∞
2α
α
L’ultimo passaggio segue dal teorema di inversione puntuale, Teorema 3.21, che si pu`o applicare
alla nostra f , che `e C ∞ per la Proposizione 3.6. Perci`o:
√
nπ
nπ
2π
f ( ) e−i α k ,
2α
α
fˆ(k) = ∑
n∈Z
ma anche
∀ k ∈ (−α, α),
√
fˆ(k) = ∑
n∈Z
nπ
2π
nπ
k
f ( ) rect ( ) e−i α k ,
2α
α
α
∀ k∈R
3.5. IL TEOREMA DEL CAMPIONAMENTO
63
(dove la convergenza della serie `e in L2 (R)). Per continuit`a in L2 (R) si pu`o antitrasformare
termine a termine, per cui (ricordando che
k
2α
F ∗ (rect ( )) = √ sinc(αx),
α
2π
come si `e mostrato a suo tempo), si ottiene
f (x) = ∑ f (
n∈Z
nπ
) sinc(αx − nπ).
α
(3.51)
La (3.51) `e gi´
a il teorema del campionamento perch´e ci dice che, purch´e α sia maggiore di k0 , la f
pu`
o essere completamente ricostruita a partire dai suoi valori nei “punti di campionamento” nπ
,
α
con n ∈ Z.
k
Per enunciare il teorema nella sua forma standard utilizziamo la variabile frequenza, ν = 2π
. Dalla
(3.51) segue che, per ogni
α
k0
F ∶=
≥
=∶ ν0 ,
2π 2π
si potr`
a scrivere
f (x) = ∑ f (nτ ) sinc (π(x/τ − n)) ,
n∈Z
dove τ = 1/2F `e il passo di campionamanto.
Possiamo cos`ı enunciare il seguente risultato.
Teorema 3.29 (Teorema del campionamento) Se f ∈ L2 (R) `e tale che supp(fˆ) ∈ [−k0 , k0 ],
allora, per ogni scelta del passo di campionamento
τ≤
1
2ν0
(dove ν0 = k0 /2π), si ha
f (x) = ∑ f (nτ ) sinc (π(x/τ − n))
(3.52)
n∈Z
(dove la convergenza `e in L2 (R)), e dunque f pu`
o essere completamente ricostruita a partire dai
suoi valori nei “punti di campionamento” nτ , al variare di n in Z.
64
CAPITOLO 3. TRASFORMATE DI FOURIER
Capitolo 4
Distribuzioni
4.1
Distribuzioni
Le distribuzioni, dette anche funzioni generalizzate, sono state usate di fatto dai fisici (Heaviside,
Dirac) fin dall’inizio del secolo scorso e furono teorizzate rigorosamente da Laurent Schwartz (Parigi
1915-2002) verso la fine degli anni ’40. La teoria matematica rigorosa definisce le distribuzioni
come funzionali su uno spazio di funzioni molto regolari, dette “funzioni test”.
Definizione 4.1 Sia Ω un aperto non vuoto di RN . Definiamo lo spazio delle funzioni test su Ω
come
D(Ω) ∶= {ϕ ∈ C ∞ ∣ supp(ϕ) ⊂ K, K ⊂ Ω compatto } = C0∞ (Ω).
Diremo che una successione di funzioni test ϕn ∈ D(Ω) converge a una funzione test ϕ ∈ D(Ω) se
1. esiste K ⊂ Ω compatto tale che supp(ϕn − ϕ) ⊂ K per ogni n;
2. per ogni multi-inidice α si ha ∇α ϕn (x) → ∇α ϕ(x) uniformemente.
◻
Osserviamo che, come spazio vettoriale, lo spazio delle funzioni test `e uguale a C0∞ (Ω) ma ha in
pi`
u una nozione di convergenza.1
Esercizio 4.2 Dimostrare che la funzione
⎧
⎪
⎪0,
ξ(x) ∶= ⎨ 1
⎪
x2 −1 ,
⎪
⎩e
se ∣x∣ ≥ 1,
se ∣x∣ < 1,
(4.1)
`e una funzione test su R.
Definizione 4.3 Una distribuzione su Ω `e un funzionale lineare e continuo su D(Ω) ovvero2 una
funzione f ∶ D(Ω) → C tale che
1. f (aϕ + bψ) = af (ϕ) + bf (ψ) per ogni ϕ, ψ ∈ D(Ω) e a, b ∈ C;
2. se ϕn → ϕ in D(Ω), allora f (ϕn ) → f (ϕ) in C.
◻
1 Analogamente a quanto osservato per lo spazio di Schwartz, esiste una topologia su D(Ω) in cui risulta che una
successione ϕn `
e convergente se e solo se valgono le propriet`
a 1 e 2 della Definizione 4.1. Tale topologia rende D(Ω)
uno spazio vettoriale topologico che `
e completo ma (a differenza di quanto accade per S(RN ) non `
e metrizzabile
(cio`
e non esiste nessuna metrica che induca la topologia). Per approfondire si veda il Cap. 6 del libro di Rudin [11].
2 Si pu`
o infatti dimostrare ([11], Teorema 6.6) che una trasformazione lineare f ∶ D(Ω) → C `
e continua se e solo
se `
e continua per successioni.
65
66
CAPITOLO 4. DISTRIBUZIONI
L’insieme delle distribuzioni su Ω `e indicato con D′ (Ω) ed `e consuetudine indicare l’azione di
f ∈ D′ (Ω) su ϕ ∈ D(Ω) con ⟨f, ϕ⟩ (anzich´e f (ϕ)).
Esercizio 4.4 Dimostrare che D′ (Ω) con le operazioni
1. ⟨f1 + f2 , ϕ⟩ ∶= ⟨f1 , ϕ⟩ + ⟨f2 , ϕ⟩, per ogni f1 , f2 ∈ D′ (Ω) e ϕ ∈ D(Ω);
2. ⟨αf, ϕ⟩ ∶= α⟨f, ϕ⟩, per ogni f ∈ D′ (Ω), α ∈ C e ϕ ∈ D(Ω);
`e uno spazio vettoriale.3
Esempio 4.5 (Distribuzioni regolari) Sia u ∈ L1loc (Ω) (cio`e u ∈ L1 (K) per ogni K ⊂ Ω compatto). Definiamo
ϕ ∈ D(Ω).
⟨fu , ϕ⟩ ∶= ∫ u(x) ϕ(x) dx,
Ω
(4.2)
Osserviamo che l’integrale esiste in quanto u `e integrabile sul supporto di ϕ, e ϕ `e limitata.
Dunque la funzione fu ∶ D(Ω) → C, che a ϕ associa il numero complesso ⟨fu , ϕ⟩, `e ben definita
ed `e chiaramente lineare. Inoltre `e continua poich´e, se ϕn `e una successione convergente a ϕ in
D(Ω), per definizione esiste un compatto K che contiene il supporto di ϕ − ϕn e inoltre ϕn → ϕ
uniformemente. Quindi
∣⟨fu , ϕ⟩ − ⟨fu , ϕn ⟩∣ ≤ ∥ϕ − ϕn ∥∞ ∫ ∣u(x)∣ dx → 0
K
′
per n → ∞. Abbiamo cos`ı dimostrato che fu ∈ D (Ω).
Definizione 4.6 Una distribuzione f tale che f = fu , per una qualche u ∈ L1loc (Ω), si dice regolare.
Si verifica facilmente che le distribuzioni regolari su Ω formano un sottospazio di D′ (Ω). Tale
sottospazio si identifica naturalmente con L1loc (Ω) per cui si dice che “le distribuzioni contengono
le funzioni” (almeno quelle localmente integrabili). Notiamo altres`ı che le stesse funzioni test
si possono identificare con distribuzioni regolari e dunque possiamo identificare D(Ω) con un
sottospazio di D′ (Ω) e scrivere
D(Ω) ⊂ D′ (Ω).
(4.3)
` evidente che se u e v sono due funzioni localmente integrabili che differiscono su un insieme di
E
misura nulla, allora definiscono la stessa distribuzione, cio`e fu = fv . Meno evidente `e il fatto che
vale anche il viceversa, come dimostrato dal risultato seguente.
Proposizione 4.7 Siano u e v due funzioni dei classe L1loc (Ω) tali che fu = fv . Allora u = v quasi
ovunque in Ω.
Dimostrazione Sia ξ la funzione data dalla (4.1). Per ogni palla B(x0 , r), di centro x0 e raggio
r, contenuta in Ω, la successione di funzioni test
1/n
φn (x) = [ξ (
∣x − x0 ∣
)]
r
tende, per n → ∞ alla funzione caratteristica di B(x0 , r) (cio`e vale 1 in B(x0 , r) e 0 al di fuori).
Dall’ipotesi fu = fv e dal teorema di convergenza dominata segue quindi che
0 = lim ∫ (u − v) (x) φn (x) dx = ∫
n→∞
Ω
3E
`
B(x0 ,r)
(u − v) (x) dx.
quello che si dice il duale dello spazio vettoriale topologico D(Ω) (si veda la nota 1 a pag. 65).
4.1. DISTRIBUZIONI
67
Per l’arbitrariet`
a di B(x0 , r) ⊂ Ω si ha che u = v quasi ovunque in Ω.4
◻
Le distribuzioni non regolari si dicono singolari. La pi`
u celebre distribuzione singolare `e la delta
di Dirac, presentata nel seguente esempio.
Esempio 4.8 (Distribuzione delta di Dirac) Definiamo
⟨δ, ϕ⟩ ∶= ϕ(0),
ϕ ∈ D(RN ).
(4.4)
` chiaro che δ ∶ D(RN ) → C, ϕ ↦ ⟨δ, ϕ⟩, `e ben definita e lineare. Inoltre `e continua, poich´e se
E
ϕn → ϕ in D(RN ) si ha senz’altro ϕn (0) → ϕ(0). Quindi δ `e in effetti una distribuzione su RN .
Proposizione 4.9 La distribuzione δ non `e regolare, ovvero non esiste nessuna funzione u ∈
L1loc (RN ) tale che δ = fu .
Dimostrazione Se tale funzione u esistesse si avrebbe
ϕ(0) = ∫
RN
ϕ ∈ D(RN ).
u(x) ϕ(x) dx,
Consideriamo le funzioni test
ϕn (x) ∶= ξ(n∣x∣),
x ∈ RN ,
n = 1, 2, . . .
dove ξ `e la funzione definita nell’esercizio 4.2. Si averbbe allora
∣ϕn (0)∣ = ∣ ∫
1
1
∣x∣≤ n
u(x) e n2 ∣x∣2 −1 dx∣ ≤ ∫
1
∣x∣≤ n
∣u(x)∣ dx
e dunque ϕn (0) → 0 per l’assoluta continuit`a dell’integrale di Lebesgue. D’altra parte ϕn (0) = 1/e
per cui si ha una contraddizione.
◻
Osservazione 4.10 Nella letteratura fisica e ingegneristica si usa di solito una notazione non
rigorosa (ma spesso efficace) che tratta la delta di Dirac come se fosse una distribuzione regolare
(cio`e una funzione), scrivendo perci`
o
ϕ(0) = ∫
RN
δ(x) ϕ(x) dx.
anzich´e, pi`
u correttamente ϕ(0) = ⟨δ, ϕ⟩, oppure ϕ(0) = δ(ϕ).
Esempio 4.11 (La distribuzione vp x1 ) La funzione 1/x, definita per x ∈ R, x =/ 0, non `e
localmente integrabile e quindi non `e associabile a una distribuzione regolare. Definiamo
1
ϕ(x)
⟨vp , ϕ⟩ = lim+ ∫
dx,
α→0
x
x
∣x∣>α
ϕ ∈ D(R)
(4.5)
(dove “vp” sta per valore principale) e dimostriamo che questa `e una distribuzione.
Vediamo intanto che vp x1 `e ben definita. Usando la formula di Taylor, possiamo scrivere ϕ(x) =
φ(0) + xψ(x), con ψ continua. Se β > 0 `e tale che supp(ϕ) ⊂ (−β, β), potremo scrivere
∫
4 Quest’ultima
∣x∣>α
ϕ(x)
ϕ(x)
ϕ(0)
dx = ∫
dx = ∫
dx + ∫
ψ(x) dx
x
x
x
α<∣x∣<β
α<∣x∣<β
α<∣x∣<β
affermazione `
e una conseguenza diretta del cosiddetto Teorema di Lebesgue: se f ∈ L1loc (Ω) allora
f (x0 ) = lim ⨏
r→0
B(x0 ,r)
f (x) dx
per quasi ogni x0 ∈ Ω (dove il simbolo ⨏ indica la media integrale). Per la dimostrazione si veda ad esempio [10].
68
CAPITOLO 4. DISTRIBUZIONI
e dunque, osservando che ∫α<∣x∣<β
ϕ(0)
x
lim+ ∫
α→0
dx = 0,
∣x∣>α
ϕ(x)
ψ(x) dx,
dx = ∫
x
∣x∣<β
che `e un numero finito.
Essendo la linearit`
a ovvia, dimostriamo ora la continuit`a. Per linearit`a, baster`a dimostrare che
⟨vp x1 , ϕn ⟩ → 0, se ϕn → 0 in D(R). Se ϕn → 0 in D(R) allora, per definizione, esiste β > 0 tale che
supp(ϕn ) ⊂ (−β, β) per ogni n. Dunque, come sopra, si potr`a scrivere
lim ∫
α→0+
∣x∣>α
ϕn (x)
ψn (x) dx,
dx = ∫
x
∣x∣<β
dove si `e posto ϕn (x) = φn (0) + xψn (x), con ψn continua. Ma
ψn (x) =
x
ϕn (x) − ϕn (0) 1
= ∫ ϕ′n (y) dy,
x
x 0
e dunque si ha che
∣ψn (x)∣ ≤ sup ∣ϕ′n (y)∣ ≤ sup ∣ϕ′n (y)∣ → 0,
y∈(0,x)
per n → ∞,
y∈(0,β)
e pertanto
1
∣⟨vp , ϕn ⟩∣ ≤ ∫
∣ψn (x)∣ dx ≤ 2β sup ∣ϕ′n (y)∣
x
∣x∣<β
y∈(0,β)
tende a 0 per n → ∞.
u
Dimostriamo ora che vp x1 `e una distribuzione singolare. Se ϕ, ψ e β sono come sopra, e se in pi`
supponiamo ϕ(0) = 0, allora
ϕ(x)
ϕ(x)
1
⟨vp , ϕ⟩ = ∫
ψ(x) dx ∫
dx = ∫
dx.
x
x
x
∣x∣<β
∣x∣<β
R
Dunque
1
ϕ(x)
⟨vp , ϕ⟩ = ∫
dx,
∀ ϕ ∈ D(R) t.c. ϕ(0) = 0.
x
x
R
Se esistesse u ∈ L1loc (R) tale che ⟨vp x1 , ϕ⟩ = ∫R uϕ dx per ogni ϕ ∈ D(R), allora per ognuna di tali
ϕ con ϕ(0) = 0 si avrebbe
ϕ(x)
dx.
∫ u(x)ϕ(x) dx = ∫
x
R
R
Applicando la proposizione 4.7 con Ω = R ∖ {0}, si potrebbe concludere che u(x) = 1/x quasi
ovunque, il che `e impossibile perch´e, come abbiamo gi`a osservato, 1/x ∉ L1loc (R).
Concludiamo l’esempio osservando che frequentemente viene omessa la notazione “vp” per cui si
parla della “distribuzione x1 ” intendendo vp x1 .
Definizione 4.12 Si dice che una successione di distribuzioni fn ∈ D′ (Ω) converge a f ∈ D′ (Ω)
se ⟨fn , ϕ⟩ → ⟨f, ϕ⟩ per ogni ϕ ∈ D(RN ).
Esempio 4.13 Consideriamo le funzioni Gaussiane gσ , definite in (3.18), che possiamo identificare come distribuzioni regolari. Abbiamo gi`a osservato in precedenza che le gσ sono un’approssimazione dell’identit`
a. Pertanto possiamo applicare il Lemma 3.14 e la formula (3.17),
ottenendo
lim+ ∫ gσ (x) ϕ(x) dx = ϕ(0).
σ→0
RN
Considerando gσ come una distribuzione regolare, questa formula pu`o essere interpretata nella
teoria delle distribuzioni come
lim+ ⟨gσ , ϕ⟩ = ⟨δ, ϕ⟩,
(4.6)
σ→0
ovvero come il fatto che le gaussiane gσ convergono alla distribuzione delta di Dirac.
4.2. DERIVAZIONE DI DISTRIBUZIONI
69
Il precedente esempio si pu`
o ovviamente generalizzare a qulunque approssimazione dell’identit`a.
Proposizione 4.14 Se fσ `e un’approssimazione dell’identit`
a, nel senso del Lemma 3.14, allora
′
N
fσ → δ in D (R ).
4.2
Derivazione di distribuzioni
Consideriamo u ∈ C 1 (R), per cui u e u′ possono essere interpretate come distribuzioni regolari,
fu , fu′ ∈ D′ (R). Se ϕ ∈ D(R), sia (a, b) un intervallo che contiene supp(ϕ). Usando l’integrazione
per parti si ha5
⟨fu′ , ϕ⟩ = ∫ u′ (x) ϕ(x) dx = ∫
R
= −∫
b
a
b
a
u′ (x) ϕ(x) dx
u(x) ϕ′ (x) dx = − ∫ u(x) ϕ′ (x) dx = −⟨fu , ϕ′ ⟩.
Ω
Notiamo che l’ultima espressione ha senso per qualunque distribuzione e dunque l’idea `e quella di
prenderla come definizione per la derivata delle distribuzioni.
Definizione 4.15 Sia Ω ⊂ R e sia f ∈ D′ (Ω). La derivata della distribuzione f `e la distribuzione
f ′ definita da
⟨f ′ , ϕ⟩ ∶= −⟨f, ϕ′ ⟩,
ϕ ∈ D(Ω).
(4.7)
Verifichiamo che f ′ `e effettivamente una distribuzione: `e chiaramente lineare e inoltre `e continua
poich´e se ϕn → ϕ in D(Ω), allora anche ϕ′n → ϕ′ in D(Ω), per cui ⟨f, ϕ′n ⟩ → ⟨f, ϕ′ ⟩ e dunque
⟨f ′ , ϕn ⟩ → ⟨f ′ , ϕ⟩.
Pi`
u in generale, per k ≥ 0, definiamo la derivata k-esima f (k) tramite la relazione
⟨f (k) , ϕ⟩ ∶= (−1)k ⟨f, ϕ(k) ⟩,
ϕ ∈ D(Ω),
e, ancora pi`
u in generale, se Ω ⊂ RN , f ∈ D′ (Ω) e α `e un multi-indice, ∇α f `e definita da
⟨∇α f, ϕ⟩ ∶= (−1)∣α∣ ⟨f, ∇α ϕ⟩,
ϕ ∈ D(Ω).
(4.8)
Osserviamo quindi che le distribuzioni hanno sempre derivate di qualunque ordine, per definizione.
Esempio 4.16 Sia δ la distribuzione delta di Dirac unidimensionale; allora δ ′ `e la distribuzione
⟨δ ′ , ϕ⟩ = −⟨δ, ϕ′ ⟩ = −ϕ′ (0),
ϕ ∈ D(R).
Pi`
u in generale, se δ `e la delta di Dirac N -dimensionale e α `e un multi-indice
⟨∇α δ, ϕ⟩ = (−1)∣α∣ ⟨δ, ∇α ϕ⟩ = (−1)∣α∣ ∇α ϕ(0),
ϕ ∈ D(RN ).
(4.9)
Se fu `e una distribuzione regolare (supponiamola unidimensionale per semplicit`a), distinguiamo
tre casi:
1. fu′ non `e una distribuzione regolare: in questo caso fu′ `e semplicemente la derivata distribuzionale di fu ;
2. u `e di classe C 1 : in questo caso (come abbiamo visto integrando per parti) fu′ = fu′ , e in
questo senso la derivata distribuzionale “coincide” con quella classica;6
5 Il ragionamento si pu`
o estendere al caso di un qualunque aperto Ω ⊂ R osservando che, comunque, il supporto
di ϕ ∈ D(Ω) si pu`
o racchiudere in un numero finito di intervalli chiusi, limitati e con interno non-vuoto.
6 L’identit`
a fu′ = fu′ vale, pi`
u in generale, per le funzioni u assolutamente continue (si veda l’Osservazione 1.6),
poich´
e per queste vale la formula di integrazione per parti. Naturalmente, in questo caso, u′ `
e la derivata classica
quasi ovunque.
70
CAPITOLO 4. DISTRIBUZIONI
3. u non `e necessariamente di classe C 1 ma fu′ `e una dstribuzione regolare: dunque esiste
v ∈ L1loc (R) tale che fu′ = fv : tale funzione v `e detta derivata debole di u (e si continua a
indicarla con u′ ).
Osserviamo quindi che abbiamo introdotto un concetto di derivazione (di una normale funzione,
non di una distribuzione) pi`
u debole, cio`e pi`
u generale, di quello tradizionale. Tale definizione pu`o
benissimo essere data anche svincolandosi dalla toria delle distribuzioni:
Definizione 4.17 Sia Ω ⊂ RN aperto e sia u ∈ L1loc (Ω). Se esiste v ∈ L1loc (Ω) tale che
ϕ ∈ C0∞ (Ω),
′
∫ u(x) ϕ (x) dx = − ∫ v(x) ϕ(x) dx,
Ω
Ω
tale v `e detta derivata debole di u.
Il seguente risultato ci dice che le derivate deboli possono essere viste anche come “limiti deboli”
di derivate ordinarie.
Proposizione 4.18 Sia ω ⊂ R. Una funzione u ∈ L1loc (Ω) ha derivata debole v ∈ L1loc (Ω) se e solo
se per ogni successione un ∈ C 1 (Ω) tale che un → u in L1loc (Ω) si ha
lim ∫ u′n (x)ϕ(x) dx = ∫ v(x)ϕ(x) dx,
n→∞
∀ ϕ ∈ D(Ω).
Ω
Ω
(4.10)
Dimostrazione Supponiamo che v sia la derivata debole di u e sia un ∈ C 1 (Ω) una successione
` facile verificare che allora fu → fu nel senso delle distribuzioni.
tale che un → u in L1loc (Ω). E
n
Allora, per ogni ϕ ∈ D(Ω), si ha
⟨fu′ n , ϕ⟩ = −⟨fun , ϕ′ ⟩ → −⟨fu , ϕ′ ⟩ = ⟨fv , ϕ⟩,
ovvero la (4.10).
Viceversa, se un ∈ C 1 (Ω) tende a u in L1loc (Ω) e vale la (4.10), allora
−⟨fu , ϕ′ ⟩ = − lim ⟨fun , ϕ′ ⟩ = lim ⟨fu′ n , ϕ⟩ = lim ⟨fu′n , ϕ⟩ = ⟨v, ϕ⟩
n→∞
n→∞
n→∞
◻
e dunque v `e la derivata debole di u.
Esempio 4.19 Consideriamo la funzione
⎧
⎪
⎪x,
u(x) ∶= ⎨
⎪
⎪
⎩0,
se x ≥ 0,
se x < 0.
Per ogni ϕ ∈ D(R) si ha
∫
+∞
−∞
u(x) ϕ′ (x) dx = ∫
0
= −∫
+∞
0
+∞
x ϕ′ (x) dx = xϕ(x)∣
ϕ(x) dx = − ∫
+∞
0
−∫
+∞
ϕ(x) dx
0
+∞
−∞
H(x) ϕ(x) dx,
dove H `e la funzione di Heaviside
⎧
⎪
⎪1, se x ≥ 0,
H(x) ∶= ⎨
⎪
⎪
⎩0, se x < 0.
(4.11)
Perci`
o u ha derivata debole e tale derivata `e H. Ora calcoliamo la derivata di H:
∫
+∞
−∞
H(x) ϕ′ (x) dx = ∫
+∞
0
ϕ′ (x) dx = −ϕ(0) = −⟨δ, ϕ⟩.
Dunque H, come distribuzione, ha per derivata la delta di Dirac; tuttavia H, come funzione, non
ha derivata debole in quanto δ non `e una distribuzione regolare.
4.2. DERIVAZIONE DI DISTRIBUZIONI
71
Proposizione 4.20 Se fn → f in D′ (Ω), allora ∇α fn → ∇α f in D′ (Ω) per ogni multi-indice α.
Dimostrazione Per ogni ϕ ∈ D(Ω) si ha
⟨∇α fn , ϕ⟩ = (−1)∣α∣ ⟨fn , ∇α ϕ⟩ → (−1)∣α∣ ⟨f, ∇α ϕ⟩ = ⟨∇α f, ϕ⟩,
◻
il che prova l’asserto.
Quindi possiamo dire, ad esempio, che ∇α gσ → ∇α δ per σ → 0+ (dove gσ `e, come la solito, la
Gaussiana).
La definizione di derivata di una distribuzione `e stata data “scaricando” l’operazione di derivazione
sulle funzioni test, ovvero tramite quella che si chiama una identit`
a aggiunta. Supponiamo che T
rappresenti una certa operazione che ha senso per le normali funzioni (o almeno per un sottoinsieme
di esse) e che vogliamo estendere alle distribuzioni. Se riusciamo a individuare S tale che, per ogni
ϕ funzione test, valga
∫ (T u)(x) ϕ(x) dx = ∫ u(x) (Sϕ)(x) dx
Ω
Ω
(detta appunto “identit`
a aggiunta”), allora si pu`o provare a definire T f , per ogni distribuzione f ,
ponendo
⟨T f, ϕ⟩ ∶= ⟨f, Sϕ⟩.
La condizione per poter far ci`
o `e che Sϕ sia ancora una funzione test. Nel caso dell’operazione di
derivazione T = ∇α e S = (−1)∣α∣ ∇α .
Un altro esempio di definizione che si basa su un’identit`a aggiunta `e dato dalla traslazione di una
distribuzione. La traslazione di una funzione `e un’operazione “puntuale”,
(Ta u) (x) = u(x − a),
che ovviamente non pu`
o essere trasferita cos`ı com’`e alle distribuzioni. Tuttavia, se u ∈ L1loc (RN )
N
e a ∈ R , si ha
∫ u(x − a) ϕ(x) dx = ∫ u(x) ϕ(x + a) dx,
RN
RN
che `e un’identit`
a aggiunta. Osservando che T−a ϕ ∈ D(RN ), possiamo definire la traslata di una
qualunque distribuzione f ∈ D′ (RN ) come
⟨Ta f, ϕ⟩ ∶= ⟨f, T−a ϕ⟩,
ϕ ∈ D(RN ).
(4.12)
Se ad esempio trasliamo la δ otteniamo
⟨Ta δ, ϕ⟩ = ⟨δ, T−a ϕ⟩ = ϕ(a).
La delta di Dirac traslata di a (si dice pi`
u spesso “centrata” in a) si indica con δa . Utilizzando
la notazione di tipo “pseudofunzione” per la δ (osservazione 4.10), l’azione della delta traslata si
scrive cos`ı:
∫ δ(x − a) ϕ(x) dx = ϕ(a).
RN
Osserviamo quindi che il valore di ϕ nel punto a si ottiene come “convoluzione” di ϕ con δ (la
formula di convoluzione con la delta sar`a introdotta da un punto di vista rigoroso pi`
u avanti).
Un altro esempio di definizione tramite identit`a aggiunta `e l’operazione di moltiplicazione di una
distribuzione f per una funzione ϑ ∶ Ω → C. Poich´e chiaramente si ha
∫ (ϑu)(x) ϕ(x) dx = ∫ u(x) (ϑϕ)(x) dx,
Ω
Ω
72
CAPITOLO 4. DISTRIBUZIONI
possiamo pensare di definire, per ogni f ∈ D′ (Ω),
⟨ϑf, ϕ⟩ = ⟨f, ϑϕ⟩,
ϕ ∈ D(Ω).
(4.13)
Tuttavia bisogna stare attenti che ϑ sia tale che ϑϕ ∈ D(Ω) per ogni ϕ ∈ D(Ω). Si dimostra
facilmente che se ϑ `e una funzione C ∞ , allora ϑf ∈ D(Ω) e la (4.13) definisce effettivamente una
distribuzione.
Esercizio 4.21 Dimostrare che Ta f e ϑf sopra definite (con ϑ ∈ C ∞ (Ω)) sono distribuzioni.
Esercizio 4.22 Sia ϑ ∈ C ∞ (Ω) e sia x0 ∈ Ω uno zero di ϑ di molteplicit`
a n (ovvero ϑ e tutte le
sue derivate fino all’ordine n − 1 si annullano in x0 ). Dimostrare che l’equazione distribuzionale
ϑf = 0
(4.14)
ammette le soluzioni
f=
α
∑ dα ∇ δx0 ,
∣α∣≤n−1
con dα coefficienti complessi arbitrari.
L’esercizio precedente `e in realt`
a un caso particolare del seguente risultato (assolutamente non
banale), la cui dimostrazione si pu`
o trovare in [11, 20].
Proposizione 4.23 Sia ϑ ∈ C ∞ (Ω) e supponiamo che ϑ abbia un unico zero x0 ∈ Ω. Allora ogni
soluzione f dell’equazione (4.14) `e necessariamente della forma
f = ∑ dα ∇α δx0 ,
(4.15)
∣α∣≤m
con dα coefficienti complessi.
Notiamo che, se lo zero x0 ha molteplicit`a n, l’Esercizio 4.22 ci dice che ogni espressione del tipo
(4.15) (con m = n−1) sar`
a soluzione, e la Proposizione 4.23 ci dice che ogni altra possibile soluzione
sar`
a comunque un polinomio nelle derivate della delta. Consideriamo per esempio il caso Ω = R2 e
θ(x, y) = x2 +y 2 (per cui l’unico zero `e l’origine, con molteplicit`a 2): l’equazione θf = 0 ha soluzioni
del tipo
∂
∂
f = a + b δ + c δ,
∂x
∂y
con a, b e c costanti arbitrarie, ma anche (ad esempio)
f=
4.3
∂2
δ.
∂x ∂y
Trasformata di Fourier di distribuzioni temperate
Consideriamo la seguente propriet`
a della trasformazione di Fourier (la cui dimostrazione `e lasciata
per esercizio).
Proposizione 4.24 Se u, ϕ ∈ L1 (RN ), allora u
ˆϕ, uϕˆ ∈ L1 (RN ) e vale l’identit`
a
∫
RN
u
ˆ(x) ϕ(x) dx = ∫
RN
u(x) ϕ(x)
ˆ
dx.
(4.16)
4.3. TRASFORMATA DI FOURIER DI DISTRIBUZIONI TEMPERATE
73
Seguendo l’idea della definizione data per “identit`a aggiunta”, vista nel paragrafo precedente,
la (4.16) sembra indicare la strada per definire la trasformata di Fourier di una distribuzione f
mediante la formula “⟨fˆ, ϕ⟩ = ⟨f, ϕ⟩”.
ˆ
Tuttavia si incontra subito una difficolt`a: se ϕ ∈ D(RN ),
N 7
non `e detto che ϕˆ stia ancora in D(R ), per cui non ha senso scrivere l’azione di f su ϕ. Lo spazio
delle funzioni test `e troppo restrittivo (e di conseguenza quello delle distribuzioni troppo largo)
per poter definire la trasformata di Fourier di una distribuzione. Un buono spazio di funzioni test
per questo scopo deve essere invariante sotto trasformazione di Fourier. Ricordando i risultati del
capitolo precedente, `e naturale pensare di ricorrere alle funzioni di Schwartz.
Nel capitolo precedente abbiamo definito lo spazio di Schwartz (definizione 3.8) e la convergenza
in tale spazio (definizione 3.9). Osserviamo che se ϕn → ϕ in D(RN ), allora ϕn → ϕ in S(RN ),
poich´e supp(ϕn − ϕ) ⊂ K, con K compatto, e quindi ∣xα ∇β (ϕn − ϕ)∣ ≤ Mα ∣∇β (ϕn − ϕ)∣, e inoltre
∇β ϕn (x) → ∇α ϕ(x) uniformemente (ricordare la definizione 4.1). Dunque non solo D(RN ) ⊂
S(RN ) ma si pu`
o anche dire che l’inclusione `e continua.
Definizione 4.25 Una distribuzione temperata (o “a crescita lenta”) su RN `e un funzionale
lineare e continuo su S(RN ) ovvero una funzione f ∶ S(RN ) → C tale che
1. f (aϕ + bψ) = af (ϕ) + bf (ψ) per ogni ϕ, ψ ∈ S(RN ) e a, b ∈ C;
2. se ϕn → ϕ in S(RN ), allora f (ϕn ) → f (ϕ) in C.
◻
Lo spazio delle distribuzioni temperate si indica con S ′ (RN ).8 Anche in questo caso l’azione di f
su ϕ si pu`
o indicare con ⟨f, ϕ⟩.
Proposizione 4.26 Una distribuzione temperata `e una distribuzione, cio`e si ha S ′ (RN ) ⊂ D′ (RN ).
Dimostrazione Se f ∈ S ′ (RN ), chiaramente, f `e un funzionale lineare su D(RN ) ⊂ S(RN ). Se,
inoltre, ϕn → ϕ in D(RN ) allora, come abbiamo detto, si ha anche ϕn → ϕ in S(RN ). Ma poich´e
f ∈ S ′ (RN ) si ha allora ⟨f, ϕn ⟩ → ⟨f, ϕ⟩, e dunque f `e continuo su D(RN ).
◻
Possiamo riassumere quanto detto finora dicendo che valgono le relazioni
D(RN ) ⊂ S(RN ) ⊂ S ′ (RN ) ⊂ D′ (RN ).
(4.17)
Osserviamo che la distinzione distribuzioni regolari/singolari `e trasversale rispetto alla distinzione
2
temperate/non-temperate. Ad esempio, ex `e una distribuzione regolare ma non temperata , poich´e
2
+∞ x
∫−∞ e ϕ(x) dx non `e necessariamente convergente se ϕ `e una funzione di Schwartz (si prenda ad
2
esempio ϕ(x) = e−x ). Viceversa, ci sono distribuzioni singolari che sono anche temperate (ad
esempio la δ e tutte le sue derivate).
n
Esercizio 4.27 Dimostrare che la distribuzione f = ∑∞
e singolare e non temperata.
n=0 e δn `
Vediamo ora una condizione sufficiente affinch´e una distribuzione regolare sia temperata.
Proposizione 4.28 Se u ∈ L1loc (RN ) `e tale che
u(x)
2 m
(1 + ∣x∣ )
∈ L1 (RN ),
per un qualche m = 0, 1, 2, . . ., allora fu `e una distribuzione temperata.
si pu`
o dimostrare che non `
e possibile che ϕ e ϕ
ˆ stiano entrambe in D(RN ).
tratta infatti del duale dello spazio vettoriale topologico S(RN ).
7 Anzi,
8 Si
74
CAPITOLO 4. DISTRIBUZIONI
Dimostrazione Sia ϕ ∈ S(RN ). Possiamo scrivere
∣∫
RN
u(x) ϕ(x) dx∣ ≤ ∫
∣u(x)∣
RN
2 m
(1 + ∣x∣ )
∣u(x)∣
2 m
≤ ∥(1 + ∣x∣ ) ϕ∥∞ ∫
2 m
(1 + ∣x∣ ) ∣ϕ(x)∣ dx
2 m
(1 + ∣x∣ )
RN
dx < +∞
e perci`
o l’azione di fu `e ben definita. Vediamo la continuit`a (baster`a far vedere che ⟨fu , ϕn ⟩ → 0
2 m
se ϕn → 0 in S(RN )). Per una tale successione ϕn si ha (1 + ∣x∣ ) ϕn (x) → 0 uniformemente
2 m
(infatti (1 + ∣x∣ ) `e un polinomio di grado 2m in x1 , x2 , . . . xn ). Dunque, con gli stessi passaggi
precedenti, si avr`
a
∣∫
∣u(x)∣
2 m
RN
u(x) ϕn (x) dx∣ ≤ ∥(1 + ∣x∣ ) ϕn ∥∞ ∫
RN
2 m
(1 + ∣x∣ )
dx → 0
per n → +∞.
◻
Corollario 4.29 Se u ∈ L1loc (RN ) `e tale che
lim
∣x∣→∞
u(x)
M
∣x∣
=0
per un qualche M = 0, 1, 2, . . ., allora fu `e una distribuzione temperata.
M
Dimostrazione Esiste R > 0 tale che ∣u(x)∣ ≤ ∣x∣ per ogni ∣x∣ > R. Sicuramente esiste m
M
2 m
2 m
sufficientemente grande affinch´e ∣x∣ /(1 + ∣x∣ ) , e quindi a maggior ragione u(x)/(1 + ∣x∣ ) , sia
2 m
integrabile in ∣x∣ > R. D’altra parte, u(x)/(1 + ∣x∣ ) `e certamente integrabile in ∣x∣ ≤ R. Pertanto
si pu`
o applicare la proposizione precedente.
◻
Le distribuzioni temperate sono importanti perch´e, come anticipato nella discussione iniziale, se
ne pu`
o definire la trasformata di Fourier. Osserviamo innanzitutto che se u ∈ L1 (RN ) allora sia fu
che fuˆ sono distribuzioni temperate. Infatti, u `e una distribuzione temperata per la proposizione
4.28 e u
ˆ `e una distribuzione temperata per il corollario 4.29 e la proposizione 3.3. La formula (4.16)
con u ∈ L1 (RN ) e ϕ ∈ S(RN ) `e stavolta una buona identit`a aggiunta (ricordiamo che ϕˆ ∈ S(RN )
per la proposizione 3.10a) che ci permette di definire la trasformata di Fourier di una distribuzione
temperata.
Definizione 4.30 Sia f ∈ S ′ (RN ). Definiamo la trasformata di Fourier fˆ come la distribuzione
temperata data da
⟨fˆ, ϕ⟩ = ⟨f, ϕ⟩,
ˆ
ϕ ∈ S(RN ).
(4.18)
Naturalmente dobbiamo verificare che fˆ cos`ı definita `e davvero una distribuzione temperata:
1. `e ben definita (in quanto ϕˆ ∈ S(RN ) per la proposizione 3.10a) e lineare;
2. se ϕn → ϕ in S(RN ), allora ϕˆn → ϕˆ (proposizione 3.10b) e dunque
⟨fˆ, ϕn ⟩ = ⟨f, ϕˆn ⟩ → ⟨f, ϕ⟩
ˆ = ⟨fˆ, ϕ⟩,
il che significa che fˆ `e un funzionale continuo su S(RN ).
4.3. TRASFORMATA DI FOURIER DI DISTRIBUZIONI TEMPERATE
75
Estendiamo la notazione F ∶ S ′ (RN ) → S ′ (RN ), Ff ∶= fˆ, per indicare la trasformazione di Fourier
sullo spazio delle distribuzioni temperate. Se definiamo
⟨F ∗ f, ϕ⟩ = ⟨f, F ∗ ϕ⟩,
ϕ ∈ S(RN ),
si vede facilmente, usando le analoghe propriet`a della trasformazione di Fourier sulle funzioni di
Schwartz, che F ∗ Ff = FF ∗ f = f , per cui F ∗ = F −1 e pertanto la trasformazione di Fourier sulle
distribuzioni temperate `e invertibile.
Si dimostra anche facilmente che F `e continua (rispetto all’ovvia nozione di convergenza delle
distribuzioni temperate).
Prima di passare agli esempi occorre definire la moltiplicazione di una distribuzione temperata per
una funzione.
Definizione 4.31 Sia ϑ ∈ C ∞ (RN ) una funzione tale che per ogni multi-indice α esitono Mα ≥ 0
e mα = 0, 1, 2, . . . tali che
2
∣∇α ϑ(x)∣ ≤ Mα (1 + ∣x∣ )mα ,
x ∈ RN .
Se f ∈ S ′ (RN ) definiamo la distribuzione temperata ϑf come
⟨ϑf, ϕ⟩ = ⟨f, ϑϕ⟩,
ϕ ∈ S(RN ).
Esercizio 4.32 Dimostrare che ϑf `e effettivamente una distribuzione temperata.
Esempio 4.33 (Trasformata di Fourier della delta di Dirac) Calcoliamo la trasformata di
Fourier della distribuzione δ. Per ogni ϕ ∈ S(RN ) si ha
ˆ ϕ⟩ = ⟨δ, ϕ⟩
⟨δ,
ˆ = ϕ(0)
ˆ
= cN ∫
RN
ϕ(x) dx.
Perci`
o δˆ `e la distribuzione regolare costante cN :
δˆ = cN .
(4.19)
Consideriamo ora la delta traslata δa . Si ha:
⟨δ̂a , ϕ⟩ = ⟨δa , ϕ⟩
ˆ = ϕ(a)
ˆ
= cN ∫
perci`
o
RN
e−ix⋅a ϕ(x) dx,
δ̂a = cN e−ix⋅a .
(4.20)
Esempio 4.34 (Trasformata di Fourier di eix⋅a ) Poich´e la trasformazione di Fourier `e invertibile su S ′ (RN ), possiamo usare la formula precedente per ricavare la trasformata della funzione
eix⋅a . Applicando F ∗ a entrambi i membri della (4.20) (e ricordando le relazioni (3.24)) si ottiene
δa = cN F ∗ e−ix⋅a = cN FJe−ix⋅a = cN Feix⋅a ,
per cui
ix⋅a = δ /c
ê
a N
(4.21)
(naturalmente la setssa conclusione poteva essere ottenuta anche con un calcolo diretto con la
definizione (4.18), provare per esercizio). In particolare, la trasformata di Fourier della funzione
costante 1 `e
̂
1 = δ/cN .
(4.22)
76
CAPITOLO 4. DISTRIBUZIONI
Osserviamo che cN F eik⋅x = δx `e la veste rigorosa del’uguaglianza
1
ik⋅(x−y)
dx = δ(x − y)
∫ e
(2π)N RN
incontrata euristicamente nell’Osservazione 3.22. Limitandoci al caso unidimensionale osserviamo
anche che, posto
⎧
⎪1, se ∣x∣ ≤ R,
⎪
χR (x) = ⎨
⎪
⎪
⎩0, se ∣x∣ > R,
+∞
′
ˆ
̂
si
R →1=
√ ha χR → 1 in S (R) (infatti ⟨χR , ϕ⟩ = ∫−R ϕ(x)dx → ∫−∞ ϕ(x)dx = ⟨1, ϕ⟩) e pertanto χ
2πδ, cio`e
+R
1
1 sin(Rk)
eik⋅x dx =
→ δ.
∫
2π −R
π
k
R
+∞
1
ik⋅x
Dunque l’“integrale” 2π
∫−∞ e dx = δ(x) si pu`o vedere anche come limite (nel senso delle distribuzioni) di integrali su ∣x∣ ≤ R (analoghe considerazioni si possono fare anche a dimensione
N ).
Esempio 4.35 (Relazione fra serie e trasformata di Fourier) Supponiamo che f ∶ R → C
sia una funzione T -periodica e di classe L2 (0, T ) e indichiamo con
N
2π
sN (x) = ∑ fn ei T
nx
n=−N
le somme parziali della Serie di Fourier di f , che sappiamo convergere a f in L2 (0T ) (Teorema
1.7). Dalla disuguaglianza (A.1) segue facilmente che sn → f in L1loc (R) e, da questa, segue la
convergenza sn → f in D′ (R). Per la continuit`a della trasformazione di Fourier in D′ (R) possiamo
quindi “trasformare termine a termine” la serie di Fourier
2π
f = ∑ fn ei T
nx
,
n∈Z
e scrivere (utilizzando la formula (4.21))
f̂ =
√
2π ∑ fn δ 2nπ
.
T
(4.23)
n∈Z
Questa identit`
a ci dice che la trasformata di Fourier di una funzione periodica `e “concentrata”
nei punti del reticolo reciproco 2nπ/T , n ∈ Z. La serie di Fourier `e interpretabile come la formula
di inversione di questa trasformata. Dunque la teoria delle distribuzioni permette di unificare la
teoria di serie e trasformata di Fourier: la prima pu`o essere interpretata come caso particolare
della seconda quando le funzioni che si trasformano sono periodiche.
Esempio 4.36 (Trasf. di Fourier della funzione di Heaviside) Consideriamo intanto la trasformata di Fourier della funzione segno (cfr. nota a pag. 115). Per ogni ϕ ∈ S(R) si ha
̂ ϕ⟩ = ⟨sgn, ϕ⟩
⟨sgn,
ˆ = c1 ∫
= lim c1 ∫
R→+∞
= lim c1 ∫
R→+∞
R
−R
−∞
sgn(k) {∫
sgn(k) {∫
+∞
−∞
+∞
ϕ(x) {∫
+∞
−∞
R
−R
+∞
−∞
ϕ(x) e−ikx dx} dk
ϕ(x) e−ikx dx} dk
sgn(k) e−ikx dk} dx,
+∞
1 − cos(Rx)
2c1
ϕ(x)
dx,
∫
R→+∞ i
x
−∞
= lim
4.3. TRASFORMATA DI FOURIER DI DISTRIBUZIONI TEMPERATE
77
dove si `e dovuto introdurre il limite su R per poter applicare il teorema di Fubini. Poich´e ϕ `e
differenziabile, possiamo scrivere
ϕ(x) = ϕ(0) + x ϕ1 (x)
con ϕ1 continua (infatti ϕ(x) = ϕ(0) + xϕ′ (0) + r(x) con r(x) infinitesimo di ordine superiore a
x). Introduciamo perci`
o un α > 0 arbitrario e scriviamo
∫
+∞
−∞
ϕ(x)
1 − cos(Rx)
1 − cos(Rx)
dx = ( ∫ + ∫ )ϕ(x)
dx =
x
x
∣x∣>α
∣x∣≤α
∫ (ϕ(0) + x ϕ1 (x))
∣x∣≤α
1 − cos(Rx)
dx + ∫
x
∣x∣>α
Poich´e la funzione
1−cos(Rx)
x
ϕ(x)
dx − ∫
x
∣x∣>α
ϕ(x)
cos(Rx) dx.
x
`e integrabile e dispari si ha
∫ (ϕ(0) + x ϕ1 (x))
∣x∣≤α
1 − cos(Rx)
dx = ∫ ϕ1 (x) dx − ∫ ϕ1 (x) cos(Rx) dx.
x
∣x∣≤α
∣x∣≤α
Il primo integrale pu`
o essere reso piccolo a piacere prendendo α abbastanza piccolo (indipendentemente da R). Il secondo tende a zero per R → ∞ per il lemma di Riemann-Lebesgue (Lemma
3.2). Per lo stesso motivo (osservando che ϕ(x)/x `e integrabile per ∣x∣ > α) si ha che
lim ∫
R→+∞
∣x∣>α
ϕ(x)
cos(Rx) dx = 0.
x
In definitiva si ha
lim ∫
R→+∞
1 − cos(Rx)
dx = ∫ ϕ1 (x) dx + ∫
x
+∞
−∞
ϕ(x)
∣x∣≤α
∣x∣>α
ϕ(x)
dx
x
e, facendo tendere α a 0 e ricordando si ottiene
2c1
ϕ(x)
1
dx = ⟨vp , ϕ⟩
∫
α→0 i
x
x
∣x∣>α
̂ ϕ⟩ = lim
⟨sgn,
Ricordando l’Esempio 4.11, possiamo dunque concludere che
̂ =
sgn
2c1
1
2
1
vp = √
vp .
i
x i 2π
x
(4.24)
Per calcolare la trasformata della funzione di Heaviside (definizione (4.11)), basta osservare che
H(x) =
sgn(x) + 1
2
e quindi, ricordando la (4.22),
√
̂ +ˆ
π 1
1 c1
1
δ
1
ˆ = sgn
H
=
vp +
=
( vp + δ) .
2
i
x 2c1
2 iπ
x
Esempio 4.37 Calcoliamo la trasformata della distribuzione f ∈ S ′ (R2 ) cos`ı definita:
⟨f, ϕ⟩ = ∫
0
2π
ϕ(R cos t, R sin t) dt,
ϕ ∈ S(R2 ),
ovvero l’integrale di ϕ sulla circonferenza di raggio R e centro l’origine.
(4.25)
78
CAPITOLO 4. DISTRIBUZIONI
Per definizione si ha
⟨fˆ, ϕ⟩ = ⟨f, ϕ⟩
ˆ =
2π
1
ϕ(R
ˆ cos t, R sin t) dt
∫
2π 0
=
2π
1
−iR(x cos t+y sin t)
ϕ(x, y) dx dy dt,
∫
∫ 2e
2π 0
R
dove l’integrale rispetto a t si pu`
o riscrivere cos`ı:
2π
∫
0
e−iR(x cos t+y sin t) dt = ∫
2π
0
e−iα sin(t+γ) dt = ∫
2π
e−iα sin t dt,
0
√
con α = R x2 + y 2 . Posto ora
I(α) ∶= ∫
si ha
I ′ (α) = −i ∫
I ′′ (α) = − ∫
2π
e−iα sin t dt,
0
2π
e−iα sin t sin t dt
2π
e−iα sin t sin2 t dt = −I(α) + ∫
0
0
2π
e−iα sin t cos2 t dt
0
e, integrando per parti,
2π
∫
0
e−iα sin t cos t cos t dt =
2π
1
i
e−iα sin t sin t dt = − I ′ (α).
∫
α 0
α
Si ha perci`
o che I(α) `e caratterizzato dall’equazione differenziale
I ′′ (α) + I(α) +
1 ′
I (α) = 0,
α
che `e l’equazione di Bessel (2.6) di ordine 0, con la condizione I(0) = 2π. Si ha dunque9
I(α) = 2πJ0 (α),
dove J0 `e la funzione di Bessel di prima specie di ordine 0, data dalla (2.7) (osserviamo che
J0 (0) = 1). Pertanto
√
⟨fˆ, ϕ⟩ = ∫ J0 (R x2 + y 2 ) ϕ(x, y) dx dy
R2
e possiamo concludere che fˆ `e la distribuzione regolare
√
fˆ(x, y) = J0 (R x2 + y 2 ).
A suo tempo abbiamo visto il comportamento della trasformazione di Fourier rispetto alla derivazione (Proposizione 3.7). Vediamo se formule analoghe valgono anche per le distribuzioni temd
perate. Cominciamo dal caso unidimensionale: se f ∈ S ′ (R) e D = dx
allora, per ogni ϕ ∈ S(R), si
pu`
o scrivere
̂ , ϕ⟩ = ⟨Df, ϕ⟩
̂ = ⟨fˆ, ixϕ⟩ = ⟨ixfˆ, ϕ⟩
⟨Df
ˆ = −⟨f, Dϕ⟩
ˆ = ⟨f, ixϕ⟩
e dunque
9 Pi`
u
̂ = ixfˆ.
Df
in generale, si pu`
o dimostrare che
JN (α) =
2π
1
ei(N t−α sin t) dt.
∫
2π 0
4.3. TRASFORMATA DI FOURIER DI DISTRIBUZIONI TEMPERATE
Inoltre
79
̂ , ϕ⟩ = ⟨xf, ϕ⟩
̂ = ⟨fˆ, −iDϕ⟩ = ⟨iDfˆ, ϕ⟩
⟨xf
ˆ = ⟨f, xϕ⟩
ˆ = ⟨f, −iDϕ⟩
e dunque
̂ = iDfˆ.
xf
Dunque ritroviamo per le distribuzioni le stesse formule trovate per le funzioni. Pi`
u in generale `e
facile dimostrare il seguente risultato.
Proposizione 4.38 Per ogni f ∈ S ′ (RN ) e per ogni multi-indice α si ha
α f = (ix)α fˆ,
̂
∇
α f = (i∇)α fˆ.
x̂
(4.26)
Esempio 4.39 Ricordando gli esempi 4.33 e 4.34 si calcolano facilmente le trasformate di Fourier:
α δ = c (ix)α
̂
• delle derivate della delta di Dirac: ∇
N
α =x
α 1 = (i∇)α̂
̂
̂
• dei monomi: x
1 = (i∇)α δ/cN .
Ad esempio, la trasformata di un polinomio p(x) = p0 + p1 x + ⋯ + pm xm `e una distribuzione che
d`
a una combinazione lineare di derivate nell’origine:
√
⟨ˆ
p, ϕ⟩ = p(iD)ϕ(0)/c1 = 2π (p0 ϕ(0) + ip1 ϕ′ (0) + ⋯ + im pm ϕ(m) (0)) .
̂′ = δˆ = c1 utilizzando
Esercizio 4.40 Ricordando che H ′ = δ (Esempio 4.19), verificare che H
(4.25) e (4.26).
Un’altra importante propriet`
a della trasformazione di Fourier sulle funzioni ordinarie `e quella di
legare prodotti e convoluzioni (proposizioni 3.12 e 3.20). Concludiamo perci`o la nostra discussione
sulle distribuzioni mostrando che tale caratteristica continua a valere anche per la trasformazione
di Fourier di distribuzioni. Poich´e, per u, ψ e ϕ integrabili, vale l’identit`a aggiunta
∫
=∫
RN
RN
(u ∗ ψ)(x) ϕ(x) dx = ∫
u(y) ∫
RN
RN
∫
RN
u(y)ψ(x − y) dy ϕ(x) dx
ψ(x − y) ϕ(x) dx dy = ∫
RN
u(y)(Jψ ∗ ϕ)(y) dy,
possiamo allora dare la seguente definizione.
Definizione 4.41 Sia f ∈ S ′ (RN ) una distribuzione temperata e ψ ∈ S(RN ) una funzione di
Schwartz. Definiamo la convoluzione di f con ψ come la distribuzione temperata f ∗ ψ definita da
⟨f ∗ ψ, ϕ⟩ = ⟨f, Jψ ∗ ϕ⟩,
ϕ ∈ S(RN ),
(4.27)
dove ricordiamo che Jψ (x) = ψ(−x).
Esercizio 4.42 Dimostrare che, effettivamente, f ∗ ψ ∈ S ′ (RN ).
Anche per le distribuzioni vale un analogo della formula (3.16), ovvero la trasformazione di Fourier
manda convoluzioni in prodotti. Infatti, ricordando le identit`a (3.24) e (3.25), per ogni f ∈ S ′ (RN )
e ψ, ϕ ∈ S ′ (RN ) possiamo scrivere
⟨F(f ∗ ψ), ϕ⟩ = ⟨f ∗ ψ, Fϕ⟩ = ⟨f, Jψ ∗ Fϕ⟩ = ⟨f, F 2 ψ ∗ Fϕ⟩
−1
−1
= c−1
N ⟨f, F(Fψ ϕ)⟩ = cN ⟨Ff, Fψ ϕ)⟩ = cN ⟨FψFf, ϕ⟩.
Notiamo che nell’ultimo passaggio si `e usata la Definizione 4.31. Si ha dunque
cN f̂
∗ ψ = ψˆ fˆ,
f ∈ S ′ (RN ), ψ ∈ S(RN ).
(4.28)
80
CAPITOLO 4. DISTRIBUZIONI
Esercizio 4.43 Dimostrare che vale anche la formula inversa
ˆ
ψ̂f = cN fˆ ∗ ψ,
f ∈ S ′ (RN ), ψ ∈ S(RN ).
(4.29)
Quello che abbiamo fatto `e definire la convoluzione tra una distribuzione temperata f e una
funzione di Schwartz ψ come distribuzione. Tuttavia possiamo definire la convoluzione tra f e ψ
anche come funzione. Infatti, se f fosse una normale funzione, potremmo scrivere
(f ∗ ψ)(x) = ∫
f (y) ψ(x − y) dy = ∫
RN
RN
f (y) (Tx Jψ)(y) dy
il che ci porta alla seguente definizione.
Definizione 4.44 Siano f ∈ S ′ (RN ) e ψ ∈ S(RN ). Definiamo la convoluzione di f con ψ come
la funzione
(f ∗ ψ)(x) = ⟨f, Tx Jψ⟩,
x ∈ RN .
(4.30)
La seguente proposizione (la cui dimostrazione si pu`o trovare in [18, 11]) ci dice che la distribuzione
f ∗ ψ `e regolare ed `e associata alla funzione (f ∗ ψ)(x) (che risulta essere C ∞ ). In questo senso le
due definizioni coincidono.
Proposizione 4.45 Siano f ∈ S ′ (RN ) e ψ ∈ S(RN ), e sia f ∗ ψ ∈ S ′ (RN ), secondo la Definizione
4.41. Consideriamo inoltre la funzione u(x) = (f ∗ ψ)(x), x ∈ RN , secondo le Definizione 4.44.
Allora u ∈ C ∞ (RN ) e
⟨f ∗ ψ, ϕ⟩ = ∫
RN
u(x)ϕ(x) dx,
∀ ϕ ∈ S(RN ).
Vediamo in particolare cosa accade facendo la convoluzione di una funzione di Schwartz con la
delta di Dirac. Usando la definizione (4.30) si ottiene
(δ ∗ ψ)(x) = ⟨δ, Tx Jψ⟩ = (Tx Jψ)(y)∣y=0 = ψ(x).
Abbiamo perci`
o dimostrato che la convoluzione di una funzione ψ ∈ S(RN ) con la δ restituisce la
funzione stessa:
δ∗ψ =ψ
(4.31)
(provare per esercizio a ricavare la stessa formula utilizzando la definizione (4.27)). Si tratta della
versione rigorosa della formula euristica
∫
RN
δ(x − y) ψ(y) dy = ψ(x),
che pu`
o essere interpretata dicendo che δ(x − y) `e il nucleo integrale dell’operatore identit`a.
4.4
Distribuzione delta periodica
Sia L un reticolo periodico in RN , come definito nel Paragrafo 1.4, e consideriamo la distribuzione
temperata
δ L = ∑ δλ ,
(4.32)
λ∈L
ovvero
⟨δ L , ϕ⟩ = ∑ ϕ(λ),
∀ ϕ ∈ S(RN ),
λ∈L
che diremo delta periodica, o delta L-periodica (si verifichi per esercizio che δ λ `e, effettivamente,
una distribuzione temperata).
4.4. DISTRIBUZIONE DELTA PERIODICA
81
Consideriamo ora, per ogni ϕ ∈ S(RN ), la periodizzata di ϕ, che `e una funzione ϕL definita da
ϕL (x) ∶= ∑ ϕ(x + λ),
x ∈ RN .
(4.33)
λ∈L
Notiamo che ϕL `e L-periodica poich´e, per ogni λ′ ∈ L,
ϕL (x + λ′ ) = ∑ ϕ (x + λ + λ′ ) = ∑ ϕ(x + λ) = ϕL (x).
λ∈L
λ∈L
Se supp(ϕ) ⊂ C + a per un certo a ∈ R , ovvero se il supporto di ϕ `e contenuto in una qualche
traslata della cella fondamentale, allora ϕL `e semplicemente l’estensione periodica di ϕ a tutto
RN (notare che in questo caso un solo termine della serie che definisce ϕL (x) `e non nullo).
Il legame tra la delta periodica e la funzione periodizzata si ottiene scrivendo
N
ϕL (x) = ∑ ϕ(x + λ) = ∑ ϕ(x − λ) = ∑ (Jϕ)(λ − x) = ⟨δ L , Tx Jϕ⟩,
λ∈L
λ∈L
λ∈L
per cui, ricordando la definizione (4.30), si ha l’identit`a
ϕL = δ L ∗ ϕ.
(4.34)
Dunque la periodizzata di ϕ si ottiene facendo la convoluzione di ϕ con la delta periodica.
Poich´e ϕL `e L-periodica, possiamo scrivere la sua serie di Fourier (1.58)
iγ⋅x
ϕL (x) = ∑ ϕL
,
γ e
γ∈L∗
dove i coefficienti di Fourier sono dati da
1
1
L
−iγ⋅x
−iγ⋅x
ϕL
dx = ∑
dx
∫ ϕ (x) e
∫ ϕ(x + λ) e
γ =
∣C∣ C
∣C∣
C
λ∈L
1
1
ϕ(y) e−iγ⋅(y−λ) dy = ∑
ϕ(y) e−iγ⋅y dy
∫
∫
∣C∣
∣C∣
C+λ
C+λ
λ∈L
λ∈L
1
1
−iγ⋅y
=
dy =
ϕ(γ).
ˆ
∫ ϕ(y) e
∣C∣ RN
cN ∣C∣
=∑
Notiamo che nel caso particolare in cui supp(ϕ) ⊂ L + a si ha ϕL
γ = ϕγ ovvero, come ci dovevamo
L
aspettare, i coefficienti di Fourier di ϕ coincidono con quelli di ϕ. La serie di Fourier di ϕL pu`o
dunque essere scritta cos`ı
ϕL (x) = ∑
γ∈L∗
1
iγ⋅(x−y)
dy = lim (∆L
∫ ϕ(y) e
n ∗ ϕ) (x),
n→∞
∣C∣ RN
(4.35)
dove, per ogni n ∈ N, la funzione ∆L
e data da
n `
∆L
n (x) =
1
eiγ⋅x ,
∑
∣C∣ γ∈L∗ , ∣γ∣≤n
x ∈ RN .
In particolare, la (4.35) per x = 0 ci d`
a
⟨δ L , ϕ⟩ = lim ⟨∆L
n , ϕ⟩
n→∞
ovvero la distribuzione regolare
possiamo perci`
o scrivere
∆L
n
tende a δ L nel senso delle distribuzioni. In questo senso
−1
δ L = ∣C∣
iγ⋅x
∑ e ,
γ∈L∗
(4.36)
e lo possiamo interpretare come sviluppo in serie di Fourier della delta periodica (di cui le funzioni
∆L
n rappresentano le “somme parziali”). Si tratta di una serie di Fourier a coefficienti costanti, che
ovviamente pu`
o essere inquadrata in modo rigoroso solo nell’ambito della teoria delle distribuzioni.
Notiamo che nel caso unidimensionale, ∆L
e essenzialmente il nucleo di Dirichlet (1.8).
n `
82
CAPITOLO 4. DISTRIBUZIONI
Osservazione 4.46 Utilizzando la notazione di tipo “pseudofunzione” riscriviamo la (4.32) come
δ L (x) = ∑ δ(x − λ)
λ∈L
e la (4.36) come
−1
∣C∣
iγ⋅x
= ∑ δ(x − λ),
∑ e
γ∈L∗
(4.37)
λ∈L
che `e una formula dalle importanti applicazioni come, ad esempio, lo studio della diffrazione dei
raggi X da parte dei cristalli.
Osservazione 4.47 Usando (4.21), (4.34) e (4.36), la trasformata di Fourier della distribuzione
temperata δ L `e data da
1
1
(2π)N /2 L∗
L =
iγ⋅x =
δ̂
δ .
∑ ê
∑ δγ =
∣C∣ γ∈L∗
cN ∣C∣ γ∈L∗
∣C∣
(4.38)
∗
perci`
o, a meno di una costante moltiplicativa, le distribuzioni δ L e δ L sono una la trasformata di
Fourier dell’altra.
4.5
Soluzione dell’equazione di Poisson
Consideriamo l’equazione di Poisson in R3
∆u(x) = −q(x),
x ∈ R3 ,
(4.39)
dove q `e una funzione assegnata, sufficientemente regolare. Dal punto di vista fisico, tale equazione
`e soddisfatta da un potenziale elettostatico o gravitazionale u, in presenza di una distribuzione q
di cariche o masse.10
Se proviamo ad usare la trasformazione di Fourier per risolvere la (4.39), analogamente a quanto
fatto negli esempi visti nel Cap. 3, otteniamo
2
∣k∣ u
ˆ(k) = qˆ(k),
k ∈ R3 ,
(4.40)
2
da cui u
ˆ(k) = qˆ(k)/∣k∣ e, antitrasformando,
u = c3 F ∗ (1/∣k∣ ) ∗ q.
2
(4.41)
2
Ora, `e facile dimostrare che la funzione 1/∣k∣ non sta n´e in L1 (R3 ) n´e in L2 (R3 ) ma appartiene a
L1loc (R3 ), e quindi la sua trasformata di Fourier pu`
o essere intesa solo nel senso delle distribuzioni
temperate.
Utilizziamo dunque la teoria delle distribuzioni per analizzare l’equazione di Poisson (4.39).
Lemma 4.48 Sia f ∈ S ′ (RN ) e ψ ∈ S(RN ), e sia α un multi-indice. Allora
∇α (f ∗ ψ) = (∇α f ) ∗ ψ = f ∗ (∇α ψ).
Dimostrazione Ricordando che f ∗ ψ ∈ C ∞ (RN ) (Proposizione 4.45), il Lemma segue facilmente
dalla (4.28) e dalla Proposizione 4.38.
◻
particolare. q ≥ 0 `
e una distribuzione di cariche positive (potenziale Coulombiano repulsivo) mentre q ≤ 0 `
e il
caso di cariche negative oppure di masse (potenziale Coulombiano attrattivo). Mettendo il segno “meno” davanti a
q (scelta fatta esclusivamente per comodit`
a di calcoli), u `
e l’energia potenziale elettrica, e dunque il campo elettrico
E`
e legato a u dalla relazione dalla relazione E = −∇u (si veda [28]).
10 In
4.5. SOLUZIONE DELL’EQUAZIONE DI POISSON
83
Teorema 4.49 Supponiamo q ∈ S(R3 ) e definiamo la soluzione fondamentale dell’equazione di
Poisson come
c3
Φ = F ∗ ( 2 ) ∈ S ′ (R3 ).
(4.42)
∣k∣
Allora:
a) Φ soddisfa l’equazione
∆Φ = −δ.
(4.43)
b) le soluzioni u ∈ S ′ (R3 ) dell’equazione (4.39) sono tutte e sole quelle della forma
u = Φ ∗ q + p,
(4.44)
dove p `e un qualunque polinomio armonico, ovvero un polinomio p(x) tale che
∆p = 0;
(4.45)
c) le u definite dalla (4.44) sono funzioni C ∞ (R3 ).
ˆ soddisfa ∣k∣2 Φ
ˆ = c3 da cui, antitraDimostrazione a) Trasformando la (4.42) si ottiene che Φ
sformando e ricordando la (4.19), si ottiene la (4.43).
b) Utilizzando il Lemma 4.48 e la propriet`a (4.31), si ha
∆(Φ ∗ q) = (∆Φ) ∗ q = −δ ∗ q = −q
e dunque Φ ∗ q ∈ S ′ (R3 ) `e una soluzione dell’equazione di Poisson. Se v ∈ S ′ (R3 ) `e un’altra
soluzione, la differenza f = u−v soddisfa l’equazione omogenea ∆f = 0, che, in S ′ (R3 ), `e equivalente
a
2
∣k∣ fˆ = 0.
Dalla Proposizione 4.23 segue che esiste un polinomio p(x) tale che
1
p(i∇)δ
fˆ =
c3
e dunque, ricordando l’Esempio 4.39, si ha che f = p (e dunque p soddisfa la (4.45)). Abbiamo
perci`
o dimostrato che ogni soluzione dell’equazione di Poisson in S ′ (R3 ) differisce da Φ ∗ q per un
polinomio armonico, ovvero la (4.44).
c) Poich´e Φ ∈ S ′ (R3 ) e q ∈ S(R3 ) (e p `e un polinomio), dalla Proposizione 4.45 otteniamo che
u ∈ C ∞ (R3 ).
◻
` evidente che la soluzione dell’equazione di Poisson (4.39) non `e unica,
Osservazione 4.50 E
poich´e possiamo sempre aggiungere una funzione armonica su R3 e ottenere ancora una soluzione. Il fatto che il Teorema 4.49 stabilisca l’unicit`a a meno di polinomi armonici deriva dal fatto
che cerchiamo soluzioni in S ′ (R3 ), il che esclude funzioni armoniche che non sono distribuzioni
temperate. La Proposizione 4.45, che abbiamo utilizzato nella dimostrazione, ha quindi la notevole implicazione che ogni funzione armonica su RN a crescita polinomiale `e necessariamente un
polinomio.
Vogliamo ora calcolare esplicitamente la soluzione fondamentale Φ, il che significa calcolare l’
2
antitrasformata della distribuzione temperata F ∗ (1/∣k∣ ). Per ogni ϕ ∈ S(R3 ) possiamo scrivere
⟨F ∗ (1/∣k∣ ), ϕ⟩ = ⟨1/∣k∣ , F ∗ ϕ⟩ = c3 ∫
2
1
2
R3
∣k∣
2
∫
R3
eik⋅x ϕ(x) dx dk
84
CAPITOLO 4. DISTRIBUZIONI
lim c3 ∫
R→∞
1
∣k∣<R
∣k∣
2
∫
eik⋅x ϕ(x) dx dk = lim c3 ∫
R→∞
R3
R3
ϕ(x) ∫
eik⋅x
∣k∣<R
2
∣k∣
dk dx,
dove si `e usato il fatto che il teorema di Fubini pu`o essere applicato quando k varia su un insieme
limitato. Fissiamo ora x e occupiamoci dell’integrale rispetto a k. Scegliamo un sistema di
coordinate polari (ρ, θ, φ) con asse polare diretta lungo la direzione individuata da x. In questo
riferimento ∣k∣ = ρ e k ⋅ x = ρ ∣x∣ cos θ, e dunque
eik⋅x
∫
∣k∣<R
= 4π ∫
2
∣k∣
R
0
dk = ∫
R
0
π
∫
0
2π
∫
eiρ ∣x∣ cos θ sin θ dφ dθ dρ
0
R∣x∣ sin t
sin(ρ ∣x∣)
4π
4π
dρ =
dt =
I(R∣x∣),
∫
ρ ∣x∣
∣x∣ 0
t
∣x∣
dove si `e posto
α
sin t
dt
t
e ricordiamo che vale il limite notevole limα→+∞ I(α) = π/2 (vedi eq. (3.31)). Ora, dall’integrazione
per parti si ottiene
β sin t
β cos t
cos α cos β
dt =
−
−∫
dt
∫
t
α
β
t2
α
α
per ogni 0 < α < β, per cui si ha
I(α) ∶= ∫
0
∣I(α)∣ ≤ ∣I(β)∣ + ∣I(β) − I(α)∣ ≤ ∣I(β)∣ + ∣
≤ ∣I(β)∣ +
β cos t
cos α
cos β
∣+∣
∣ + ∫ ∣ 2 ∣dt
α
β
t
α
β 1
1 1
2
+ +∫
dt = ∣I(β)∣ +
α β
α
α t2
e quindi, facendo tendere β a +∞,
π 2
+ .
2 α
Tornando alla nostra antitrasformata, possiamo dunque scrivere
∣I(α)∣ ≤
⟨1/∣k∣ , F ∗ ϕ⟩ = 4πc3 lim ∫
R→∞
2
= 4πc3 ∫
lim
R3 R→∞
R3
(4.46)
I(R∣x∣) ϕ(x)
dx
∣x∣
I(R∣x∣) ϕ(x)
ϕ(x)
dx = 2π 2 c3 ∫
dx,
∣x∣
R3 ∣x∣
dove, per passare il limite dentro l’integrale, si `e potuto sfruttare il teorema della convergenza
dominata (Teorema A.11) in quanto, grazie alla (4.46),
∣
I(R∣x∣) ϕ(x)
π∣ϕ(x)∣ 2∣ϕ(x)∣ π∣ϕ(x)∣ 2∣ϕ(x)∣
∣≤
+
≤
+
2
2
∣x∣
2∣x∣
2∣x∣
R∣x∣
∣x∣
2
(per R sufficientemente grande), e la funzione maggiorante `e integrabile in quanto 1/∣x∣ e 1/∣x∣
sono localmente integrabili e ϕ ∈ S(R3 ). Abbiamo perci`o dimostrato che Φ `e una distribuzione
regolare data da
c3
1
Φ = F∗ ( 2 ) =
.
(4.47)
4π∣x∣
∣k∣
La soluzione u = Φ ∗ q dell’equazione di Poisson `e quindi
u(x) = ∫
R3
Φ(x − y) q(y) dy =
1
q(y)
dy.
∫
4π R3 ∣x − y∣
(4.48)
Tale soluzione `e la pi`
u interessante dal punto di vista fisico, poich´e `e sensato richiedere che il
potenziale resti limitato per ∣x∣ → +∞.
4.6. SOLUZIONE DELL’EQUAZIONE DELLE ONDE IN R3 E IN R2
85
Proposizione 4.51 Fra tutte le soluzioni date dalla (4.44), le uniche limitate sono quelle con p
costante.
Dimostrazione Utilizzando l’ipotesi q ∈ S(R3 ), possiamo scrivere
∣(Φ ∗ q)(x)∣ ≤ ∫
∣q(y)∣
∣q(x − y)∣
∣q(x − y)∣
∣q(x − y)∣
dy = ∫
dy ≤ ∫
dy + ∫
dy
3
∣x − y∣
∣y∣
∣y∣
∣y∣
R
∣y∣≤1
∣y∣>1
1
∣q(x − y)∣ dy ≤ 2π∥q∥∞ + ∥q∥1 ,
dy + ∫
≤ ∥q∥∞ ∫
∣y∣>1
∣y∣≤1 ∣y∣
R3
e dunque Φ ∗ q `e limitata. Ogni altra soluzione si ottiene addizionando un polinomio armonico p
e quindi non sar`
a limitata, salvo il caso di p costante.
◻
Osservazione 4.52 La soluzione fondamentale Φ `e la soluzione dell’equazione di Poisson quando
la sorgente q `e una delta di Dirac. Questo `e coerente col fatto che, da un punto di vista fisico, Φ
`e proprio il potenziale coulombiano generato da una carica puntiforme positiva posta nell’origine.
La soluzione (4.48), che dal punto di vista fisico `e l’unica accettabile, si pu`o dunque interpretare
come il risultato della sovrapposizione dei potenziali coulombiani generati in ogni punto y dello
spazio dalla carica infinitesima q(y) dy.
Osservazione 4.53 Con un metodo simile a quello appena visto nel caso N = 3, si pu`o risolvere
l’equazione di Poisson anche in RN , con N ≥ 1, e risulta che la soluzione fondamentale `e
⎧
1
⎪
⎪
− ∣x∣, se N = 1,
⎪
⎪
⎪
2
⎪
⎪
⎪
⎪
⎪
⎪
1
⎪
log ∣x∣, se N = 2,
Φ(x) = ⎨ −
2π
⎪
⎪
⎪
⎪
⎪
⎪
1
⎪
⎪
⎪
, se N ≥ 3,
⎪
N −2
⎪
⎪
⎩ (N − 2) ωN ∣x∣
(4.49)
dove ωN `e la misura della superficie della sfera unitaria in RN , data dalla (A.4).
4.6
Soluzione dell’equazione delle onde in R3 e in R2
Ricordiamo che la soluzione dell’equazione delle onde in RN , con dati di Cauchy ϕ e ψ, ha la
forma
sin c∣k∣t
u(x, t) = cN F ∗ (cos c∣k∣t) ∗ ϕ + cN F ∗ (
) ∗ ψ.
(4.50)
c∣k∣
Per scrivere esplicitamente la soluzione dobbiamo antitrasformare le funzioni cos(c∣k∣t) e sin(c∣k∣t)/c∣k∣,
il che pu`
o essere fatto solo nel senso delle distribuzioni temperate (`e chiaro che tali funzioni non
sono n´e L1 n´e L2 ma sono distribuzioni temperate).
Cominciamo col caso N = 3. Per ogni R > 0 e ϕ ∈ S(R3 ), definiamo la distribuzione
⟨ΣR , ϕ⟩ =
2π
π
1
1
˜
θ, φ)R2 sin θ dθ dφ,
ϕ(x) dσx =
∫
∫
∫ ϕ(R,
2
2
4πR ∂B(0,R)
4πR 0
0
dove dσx indica l’elemento di superficie relativo alla variabile x. Si verifica facilmente che ΣR
`e una distribuzione temperata; tale distribuzione restituisce la media di ϕ sulla superficie della
sfera di centro l’origine e raggio R, indicata con B(0, R). Vogliamo ora calcolare la trasformata
di Fourier di ΣR . Si ha
̂ R , ϕ⟩ = ⟨ΣR , ϕ⟩
̂ =
⟨Σ
1
̂
ϕ(k)
dσk
∫
4πR2 ∂B(0,R)
86
CAPITOLO 4. DISTRIBUZIONI
=
c3
c3
−ik⋅x
e−ik⋅x dσk dx
dx dσk =
∫
∫ 3 ϕ(x) e
∫ ϕ(x) ∫
2
4πR ∂B(0,R) R
4πR2 R3
∂B(0,R)
(notiamo che, a differenza di quanto fatto nel paragrafo precedente, qui si `e potuto applicare direttamente il teorema di Fubini). Calcoliamo l’integrale pi`
u interno usando un sistema di coordinate
polari con asse polare lungo la direzione di x:
∫
∂B(0,R)
e−ik⋅x dσk = ∫
2π
π
∫
0
0
e−iR∣x∣ cos θ R2 sin θ dθ dφ =
4πR2
sin R∣x∣
R∣x∣
e perci`
o otteniamo
̂ R , ϕ⟩ = c3 ∫
⟨Σ
R3
ϕ(x)
sin R∣x∣
dx
R∣x∣
̂ R `e la distribuzione temperata regolare
e quindi Σ
̂ R (x) = c3 sin R∣x∣ .
Σ
R∣x∣
Invertendo la trasformazione si ottiene
F∗ (
sin R∣x∣
1
) = ΣR
R∣x∣
c3
e dunque
F∗ (
sin c∣k∣t
sin c∣k∣∣t∣
t
sin c∣k∣t
) = tF ∗ (
) = tF ∗ (
) = Σc∣t∣ ,
c∣k∣
c∣k∣t
c∣k∣∣t∣
c3
che ci permette di calcolare il secondo termine della (4.50):
c3 F ∗ (
sin c∣k∣t
) ∗ ψ = tΣc∣t∣ ∗ ψ.
c∣k∣
Cosa significa questa formula? Si tratta della convoluzione della distribuzione temperata tΣc∣t∣ con
la funzione ψ. Ricordando la (4.30), ΣR ∗ ψ `e la funzione
(ΣR ∗ ψ)(x) = ⟨ΣR , Tx Jψ⟩ =
1
(Jψ)(y − x) dσy
∫
4πR2 ∂B(0,R)
1
1
ψ(x − y) dσy =
ψ(y) dσy ,
∫
∫
4πR2 ∂B(0,R)
4πR2 ∂B(x,R)
ovvero la media di ψ sulla superficie della sfera di raggio R e centro x. Possiamo pertanto scrivere
=
c3 F ∗ (
sin c∣k∣t
t
) ∗ ψ(x) =
ψ(y) dσy .
∫
c∣k∣
4π(ct)2 ∂B(x,c∣t∣)
Per completare la soluzione basta osservare che
F ∗ (cos c∣k∣t) ∗ ϕ =
∂ ∗ sin c∣k∣t
F (
)∗ϕ
∂t
c∣k∣
per cui si ottiene la soluzione completa nella forma
u(x, t) =
∂
t
t
(
ϕ(y) dσy ) +
ψ(y) dσy .
∫
∫
2
∂t 4π(ct) ∂B(x,c∣t∣)
4π(ct)2 ∂B(x,c∣t∣)
(4.51)
Possiamo riscrivere questa espressione in una forma pi`
u compatta introducendo il cambio di
2
variabile y = x + c∣t∣z, per cui si ha dσy = (ct) dσz , grazie al quale si pu`o scrivere
∂
t
∂
t
(
ϕ(y) dσy ) =
( ∫
ϕ(x + c∣t∣z) dσz )
∫
∂t 4π(ct)2 ∂B(x,c∣t∣)
∂t 4π ∂B(0,1)
4.6. SOLUZIONE DELL’EQUAZIONE DELLE ONDE IN R3 E IN R2
=
87
c∣t∣
1
ϕ(x + c∣t∣z) dσz +
z ⋅ ∇ϕ(x + c∣t∣z) dσz .
∫
∫
4π ∂B(0,1)
4π ∂B(0,1)
Rifacendo il cambio di variabile all’indietro e sostituendo nella (4.51), si ottiene la soluzione nella
forma
1
u(x, t) =
[ϕ(y) + (y − x) ⋅ ∇ϕ(y) + t ψ(y)] dσy ,
(4.52)
∫
4π(ct)2 ∂B(x,c∣t∣)
detta formula di Kirchhoff.
Per ottenere la soluzione nel caso N = 2 utilizziamo il cosiddetto “metodo della discesa”: siano
ϕ(x1 , x2 ) e ψ(x1 , x2 ) i dati iniziali per il problema in dimensione 2 e interpretiamoli come dati per
il problema in dimensione 3, indipendenti dalla terza coordinata x3 . Scriviamo quindi la soluzione
(4.51): se tale soluzione `e indipendente da x3 , allora essa (come si pu`o facilmente dimostrare) `e
soluzione del problema bidimensionale.
Con questa strategia in mente, scriviamo dunque la (4.51) per ϕ = ϕ(x1 , x2 ) e ψ = ψ(x1 , x2 ).
Utilizzando le coordinate polari si ha
u(x, t) =
2π
π
∂
t
( ∫
∫ ϕ(x1 + c∣t∣ sin θ cos φ, x2 + c∣t∣ sin θ sin φ) sin θ dθ dφ)
∂t 4π 0
0
2π
π
t
+
∫
∫ ψ(x1 + c∣t∣ sin θ cos φ, x2 + c∣t∣ sin θ sin φ) sin θ dθ dφ,
4π 0
0
(4.53)
che `e effettivamente indipendente da x3 e perci`o `e (almeno formalmente) la soluzione dell’equazione
delle onde a dimensione 2. Per esprimere la soluzione in una forma pi`
u semplice osserviamo che,
al variare di θ in [0, π/2] e φ in [0, 2π], le variabili
⎧
⎪
⎪ ξ1 = c∣t∣ sin θ cos φ
⎨
⎪
⎪
⎩ ξ2 = c∣t∣ sin θ sin φ
descrivono il disco
D(0, c∣t∣) ∶= {ξ ∈ R2 ∣ ∣ξ∣ ≤ c∣t∣},
mentre, se θ varia in [0, π], lo descrivono due volte (infatti ξ1 e ξ2 sono le proiezioni sul disco
nel piano (x1 , x2 ) dei punti descritti sulla sfera ∣ξ∣ ≤ c∣t∣ dalle coordinate sferiche). La matrice
Jacobiana della trasformazione `e
∂(ξ1 , ξ2 )
cos θ cos φ − sin θ sin φ
= c∣t∣ (
)
cos θ sin φ sin θ cos φ,
∂(θ, φ)
per cui
det
∂(ξ1 , ξ2 )
= (ct)2 cos θ sin θ,
∂(θ, φ)
det
∂(θ, φ)
1
=
.
2
∂(ξ1 , ξ2 ) (ct) cos θ sin θ
Utilizzando questo cambio di variabili nella (4.53), osservando che ξ12 +ξ22 = (ct)2 sin2 θ, e ricordando
che il disco unitario `e percorso due volte dalla variabile ξ = (ξ1 , ξ2 ), si ottiene
u(x, t) =
∂
ϕ(x + ξ)
dξ
ψ(x + ξ)
dξ
+∫
√
√
∫
2
∂t D(0,c∣t∣) (ct)2 − ∣ξ∣2 2πc
2πc
D(0,c∣t∣)
(ct)2 − ∣ξ∣
(4.54)
dove, naturalmente, x = (x1 , x2 ). Procedendo in modo simile a quanto fatto nel caso tridimensionale possiamo riscrivere la soluzione nella forma
u(x, t) =
1
ϕ(y) + (y − x) ⋅ ∇ϕ(y) + t ψ(y)
√
dy
∫
2πct D(x,c∣t∣)
(ct)2 − ∣y − x∣2
che in questo caso prende il nome di formula di Poisson.
(4.55)
88
CAPITOLO 4. DISTRIBUZIONI
Notiamo la differenza qualitativa tra la soluzione tridimensionale e qualla bidimensionale. Nel
primo caso i dati iniziali si propagano lungo la superficie dei coni ∣x∣ = c∣t∣, e infatti la (4.51) dipende
dall’integrale dei dati iniziali sulla supercicie di {x ∈ R3 ∣ ∣x∣ = c∣t∣}. Per N = 2, invece, l’influenza
dei dati si estende anche all’interno dei coni, e infatti la (4.54) dipende dall’integrale dei dati su
tutto l’insieme {x ∈ R2 ∣ ∣x∣ ≤ c∣t∣} (la stessa cosa si pu`o dire anche per la formula di D’Alembert in
dimensione 1 ma solo per quanto riguarda il dato ψ). Immaginiamo una perturbazione puntuale e
istantanea, in un punto x all’istante t = 0, e un osservatore posto in un altro punto y. In dimensione
3 l’osservatore “sente” la perturbazione solo a quell’istante di tempo t0 tale che ∣y − x∣ = ct0 , essendo
il segnale trasportato dal fronte d’onda sferico ∣y − x∣ = ct (`e il cosiddetto principio di Huygens). A
dimensione 2 il principio di Huygens non vale: l’osservatore sente la perturbazione a tutti i tempi
t per cui ∣y − x∣ ≤ ct, ovvero a tutti gli istanti successivi a t0 .
La soluzione del problema di Cauchy per l’equazione delle onde in RN si pu`o ricavare esplicitamente
per ogni N (cfr. ad esempio [3]) e si pu`o vedere che il principio di Huygens vale solo per N dispari
e maggiore o uguale a 3.
Capitolo 5
Semigruppi di operatori e
problemi di evoluzione
5.1
Semigruppi di operatori
Definizione 5.1 Sia X uno spazio di Banach e A ∶ X → X un’applicazione lineare (pi`
u comunemente detta “operatore” lineare). L’operatore A si dice limitato se esiste M ≥ 0 tale che
∥Au∥X ≤ M ∥u∥X ,
u ∈ X.
(5.1)
Lo spazio vettoriale degli operatori lineari e limitati su X si indica con B(X).
La seguente Proposizione ci dice che la limitatezza `e equivalente alla continuit`a.
Proposizione 5.2 Sia X uno spazio di Banach e A ∶ X → X un operatore lineare. Le seguenti
propriet`
a sono equivalenti:
(a) A ∈ B(X);
(b) A `e continuo;
(c) A `e continuo in un punto u0 ∈ X.
Dimostrazione Le implicazioni (a) ⇒ (b) e (b) ⇒ (c) sono evidenti; dimostriamo quindi che (c)
⇒ (a).
Se per assurdo A ∉ B(X), allora per ogni M ≥ 0 esiste u ∈ X tale che ∥Au∥ > M ∥u∥ Quindi `e
possibile costruire una successione un ∈ X tale che
∥Aun ∥ > n∥un ∥,
Posto
wn =
∀ n ∈ N.
un
+ u0
n∥un ∥
si avrebbe quindi
∥wn − u0 ∥ =
1
,
n
∥Awn − Au0 ∥ =
Aun
>1
n∥un ∥
e quindi per n → ∞ si avrebbe wn → u0 ma Awn →
/ A0 , contraddicendo la continuit`a di A in u0 . ◻
89
90
CAPITOLO 5. SEMIGRUPPI
Definizione 5.3 Se A ∈ B(X) si definisce
∥A∥B(X) = inf {M ≥ 0 ∣ ∥Au∥X ≤ M ∥u∥X , ∀ u ∈ X} .
(5.2)
Si dimostra facilmente che ∥Au∥B(X) `e una norma su B(X). Notiamo che per ogni u ∈ X vale la
disuguaglianza
∥Au∥X ≤ ∥A∥B(X) ∥u∥X ,
(5.3)
che scriveremo pi`
u brevemente
∥Au∥ ≤ ∥A∥ ∥u∥
qualora non ci sia possibilit`
a di equivoco. Dalla continuit`a di A ∈ B(X) e dal fatto che X `e completo
segue che B(X) (con la norma ∥⋅∥B(X) ) `e uno spazio di Banach. In realt`a si pu`o dire qualcosa di
pi`
u poich´e B(X) `e un’algebra (non commutativa) rispetto all’operazione di composizione
(A ○ B)u = A(Bu),
A, B ∈ B(X),
u∈X
(5.4)
(che d’ora in poi denoteremo semplicemente con AB). L’algebra ha un’unit`a che `e l’operatore
identit`
a I ∈ B(X), definito da
Iu = u ∀ u ∈ X.
Se A, B ∈ B(X), si vede facilmente (esercizio) che
∥AB∥ ≤ ∥A∥ ∥B∥,
(5.5)
il che implica che l’operazione di composizione `e continua in B(X). Si dice allora che B(X) `e
un’algebra di Banach (con unit`
a).1
In B(X), oltre alla nozione di continuit`a associata alla norma ∥⋅∥B(X) (la continuit`
a uniforme)
esiste un’altra nozione di continuit`
a: la continuit`
a forte.
Definizione 5.4 Una successione An ∈ B(X) si dice convergere fortemente (o in senso forte) ad
A ∈ B(X) se
lim ∥An u − Au∥X = 0,
∀ u ∈ X.
n→+∞
A dispetto del nome, la continuit`
a forte `e pi`
u debole della continuit`a uniforme, come mostra la
seguente Proposizione.
Proposizione 5.5 Se An → A uniformemente in B(X) (ovvero ∥An − A∥B(X) → 0 per n → +∞),
allora An → A fortemente in B(X).
Dimostrazione Per ogni u ∈ X si ha
∥An u − Au∥ = ∥(An − A)u∥ ≤ ∥An − A∥∥u∥ → 0,
quando n → +∞, il che dimostra la tesi.
◻
Definizione 5.6 Sia X uno spazio di Banach e R+ = [0, +∞). Un semigruppo fortemente
continuo (o C0 -semigruppo) su X `e un’applicazione S ∶ R+ → B(X) tale che
1) S(0) = I ;
2) S(t + s) = S(t) S(s), per ogni t, s ≥ 0;
3) limt→0+ ∥S(t)u − u∥X = 0, per ogni u ∈ X.
1A
dimensione finita (X = CN ) tutti gli operatori lineari sono limitati e B(X) `
e l’algebra delle matrici N × N .
5.1. SEMIGRUPPI DI OPERATORI
91
Notiamo che si tratta di un omomorfismo del semigruppo con unit`a (R+ , +) nel semigruppo con
unit`
a (B(X), ○). Il semigruppo (B(X), ○) non `e commutativo, ma il sotto-semigruppo {S(t) ∣ t ≥
0}, immagine di (R+ , +) tramite S, lo `e. La propriet`a 3 ci dice che la famiglia di operatori S(t)
converge in senso forte all’operatore identit`a per t → 0+ , ovvero che S(t) `e fortemente continuo in
0.
Proposizione 5.7 Se S `e un C0 -semigruppo, allora esistono M ≥ 0 e ω ∈ R tali che
∥S(t)∥ ≤ M eωt
(5.6)
per ogni t ≥ 0.
Omettiamo la dimostrazione della proposizione 5.7. Dimostriamo invece il risultato successivo: la
continuit`
a forte in t = 0 (propriet`
a 3) implica la continuit`a forte in ogni t ≥ 0.
Proposizione 5.8 Se S `e un C0 -semigruppo e t0 > 0, allora
lim ∥S(t)u − S(t0 )u∥X = 0
t→t0
per ogni u ∈ X.
Dimostrazione Per ogni u ∈ X, usando le propriet`a 1-3, possiamo scrivere
lim ∥S(t0 + h)u − S(t0 )u∥ = lim+ ∥S(h)S(t0 )u − S(t0 )u∥ = 0
h→0+
h→0
e inoltre (usando anche la proposizione precedente)
lim ∥S(t0 − h)u − S(t0 )u∥ = lim+ ∥S(t0 − h) (S(h)u − u)∥
h→0+
h→0
≤ lim+ M e(t0 −h)ω ∥S(h)u − u∥ = 0.
h→0
Abbiamo perci`
o dimostrato la continuit`a forte da destra e da sinistra in t0 .
◻
Definizione 5.9 Sia X uno spazio di Banach. Un gruppo fortemente continuo (o C0 -gruppo) su
X `e un’applicazione S ∶ R → B(X) tale che
1) S(0) = I ;
2) S(t + s) = S(t) S(s), per ogni t, s ∈ R;
3) limt→0 ∥S(t)u − u∥X = 0, per ogni u ∈ X.
Si tratta perci`
o di un omomorfismo del gruppo (R, +) nel gruppo degli operatori limitati inverti` immediato convincersi che la restrizione di un C0 -gruppo
bili.2 Osserviamo che S(−t) = S(t)−1 . E
+
alla semiretta R `e un C0 -semigruppo.
2 Un operatore A ∈ B(X) si dice invertibile se esiste B ∈ B(X) tale che AB = BA = I. Tale B `
e detto inverso di
A e viene denotato con A−1 .
92
5.2
CAPITOLO 5. SEMIGRUPPI
Gruppo generato da un operatore limitato
Teorema 5.10 Sia X uno spazio di Banach e A ∈ B(X). Posto
∞
tk k
A ,
k=0 k!
S(t) ∶= ∑
t ∈ R,
(5.7)
risulta che S ∶ R → B(X) `e un gruppo uniformemente continuo, cio`e
lim ∥S(t) − I∥B(X) = 0.
(5.8)
t→0
Dimostrazione La serie ∑∞
k=0
tk
k!
Ak converge totalmente in B(X), difatti:
∞
k=0
∞
∣t∣
tk k
k
A ∥≤ ∑
∥A∥ = e∣t∣ ∥A∥
k!
k!
k=0
k
∑∥
e dunque S(t) ∈ B(X) per ogni t ∈ R. Dimostriamo che valgono le propriet`a di gruppo S(0) = I e
S(t + s) = S(t)S(s), t, s ∈ R.
La prima propriet`
a `e evidente in quanto per t = 0 la serie che definisce S si riduce al primo termine.
Per dimostrare la seconda propriet`
a indichiamo con Sn (t) la somma parziale fino al termine
n-esimo. Si ha
n
(t + s)k k n k k tr sk−r k
Sn (t + s) = ∑
A = ∑ ∑( )
A =
k!
k!
k=0
k=0 r=0 r
n n
n n−r r
k tr sk−r k n n−r ` + r tr s`
t
s`
A =∑∑(
)
A`+r = ∑ ∑ Ar A`
∑ ∑( )
k!
r (` + r)!
`!
r=0 k=r r
r=0 `=0
r=0 `=0 r!
e, d’altra parte,
tr r s` `
A
A ,
`!
r=0 `=0 r!
n
n
Sn (t)Sn (s) = ∑ ∑
per cui la differenza fra Sn (t)Sn (s) e Sn (t + s) `e
n
tr r s` ` n
tr s` (r+`)
A
A =∑ ∑
A
`!
r=1 `=n−r+1 r!
r=1 `=n−r+1 r! `!
n
Sn (t)Sn (s) − Sn (t + s) = ∑
n
∑
2n
n
tr sk−r
tr sk−r
Ak = ∑ ∑
Ak ,
r!
(k
−
r)!
r!
(k
−
r)!
r=1 k=n+1
k=n+1 r=k−n
n
n+r
=∑ ∑
dove la validit`
a dell’ultima uguaglianza si pu`o facilmente verificare nella figura 5.1. Dunque
r
k−r
∣t∣ ∣s∣
k
∥A∥
r!
(k
−
r)!
k=n+1 r=k−n
2n
∥Sn (t)Sn (s) − Sn (t + s)∥ ≤ ∑
n
∑
2n
∞
∣t∣ ∣s∣
(∣t∣ + ∣s∣)k
(∣t∣ + ∣s∣)k
k
k
k
∥A∥ = ∑
∥A∥ ≤ ∑
∥A∥ .
r!
(k
−
r)!
k!
k!
k=n+1 r=0
k=n+1
k=n+1
2n
k
r
k−r
≤ ∑ ∑
L’ultimo termine della disuguaglianza, che `e il resto di una serie esponenziale, tende a zero per
n → ∞, il che dimostra S(t + s) = S(t)S(s).
Infine, oer t → 0 si ha
∞
∞
tk k
∣t∣
k
A ∥≤ ∑
∥A∥ = e∣t∣ ∥A∥ − 1 → 0,
k!
k!
k=1
k=1
k
∥S(t) − I∥ = ∥ ∑
il che dimostra la (5.8).
◻
Il gruppo S(t) che abbiamo appena costruito, si dice generato da A. Si tratta di un gruppo
uniformemente continuo e quindi, come gi`a osservato (Proposizione 5.5), `e in particolare un C0 gruppo.
5.2. GRUPPO GENERATO DA UN OPERATORE LIMITATO
93
Figura 5.1: La somma ∑nr=1 ∑n+r
k=n+1 corrisponde ai punti racchiusi dal triangolo ombreggiato. Fissando
n
prima k e facedo variare r `e facile verificare che tale somma `e equivalente a ∑2n
k=n+1 ∑r=k−n .
Teorema 5.11 Sia A ∈ B(X) e sia S(t) il gruppo generato da A. Per ogni u0 ∈ X, la funzione
u ∶ R → X,
u(t) ∶= S(t)u0 ,
t ∈ R,
`e derivabile e soddisfa il “problema di Cauchy”
⎧
d
⎪
⎪
⎪
⎪ dt u(t) = Au(t),
⎨
⎪
⎪
⎪
⎪
⎩ u(0) = u0 .
t ∈ R,
(5.9)
Dimostrazione Consideriamo la serie delle derivate
tk−1
tk−1
d tk k
A =
Ak = A
Ak−1 .
dt k!
(k − 1)!
(k − 1)!
Poich´e
k−1
∥A
tk−1
∣t∣
k−1
Ak−1 ∥ ≤ ∥A∥
∥A∥
(k − 1)!
(k − 1)!
si ha che la serie delle derivate `e totalmente convergente in B(X) e che questa convergenza `e
uniforme rispetto a t in intervalli limitati. Poich´e vale un teorema di derivazione termine a termine
negli spazi di Banach analogo a quello per funzioni a valori reali (la dimostrazione `e identica), si
avr`
a che S ∶ R → B(X) `e derivabile, con
∞
∞
d
d tk k
tk−1
S(t) = ∑
A =A∑
Ak−1 = AS(t) = S(t)A.
dt
dt
k!
(k
−
1)!
k=0
k=1
Ora, per h → 0, si ha
∥
u(t + h) − u(t)
S(t + h) − S(t)
− Au(t)∥ = ∥[
− AS(t)] u0 ∥
h
h
≤∥
S(t + h) − S(t)
− AS(t)∥ ∥u0 ∥ → 0
h
94
CAPITOLO 5. SEMIGRUPPI
d
e dunque u ∶ R → X `e derivabile con dt
u(t) = Au(t). Inoltre u(0) = S(0)u0 = Iu0 = u0 . Dunque
u(t) `e soluzione di (5.9) (osserviamo che u ∈ C 1 (R, X)).
◻
Per le evidenti analogie con la funzione esponenziale, il gruppo generato da A ∈ B(X) si indica
con etA .
Esercizio 5.12 Un esempio con X = C2 . Sia (α1 , α2 , α3 ) ∈ R3 e sia
α3
A=(
α1 + iα2
α1 − iα2
).
−α3
Calcolare etA .
5.3
Cenni sul caso del generatore non-limitato
Su uno spazio di Banach X possono agire operatori lineari che non sono limitati (se X ha dimensione finita, per`
o, tutti gli operatori lineari sono limitati). In generale, un operatore lineare
in uno spazio di Banach X `e un’applicazione lineare A ∶ D(A) → X, dove D(A) `e un sottospazio
lineare di X detto dominio di A. Ad esempio, gli operatori di tipo differenziale sono generalmente
non-limitati, come mostra il seguente esempio.
Esempio 5.13 Sia X = C([−1, 1]) (con la norma del sup) e poniamo
Au ∶= u′ ,
∀ u ∈ D(A) ∶= C 1 ([−1, 1])
Dimostriamo che tale operatore non `e limitato, cio`e non esiste alcun M ≥ 0 tale che ∥Au∥∞ ≤
M ∥u∥∞ per ogni u ∈ D(A). Consideriamo la successione un ∈ D(A)
√
un (x) = x2 + 1/n,
` facile verificare che un (x) → ∣x∣ uniformemente (cio`e nella norma di X). Se A fosse limitato
E
allora Aun = u′n sarebbe una successione di Cauchy in X e quindi convergerebbe uniformemente a
una funzione continua, mentre il limite di u′n (x) `e una funzione discontinua.
Nelle applicazioni, il caso del generatore A non limitato `e ben pi`
u tipico di quello del generatore
limitato. I problemi visti negli esempi (trasporto, calore, onde) hanno tutti generatori non limitati.
Vogliamo ora mostrare, senza pretesa di essere esaurienti, come la teoria esposta nel paragrafo
precedente pu`
o essere estesa a questo caso pi`
u generale e pi`
u significativo.
Ricordiamo che per il gruppo generato da un operatore limitato A ∈ B(X) abbiamo dimostrato
d tA
e u = AetA u, per cui
che dt
d
Au = etA u∣ .
t=0
dt
Questa osservazione motiva la seguente definizione.
Definizione 5.14 Sia X uno spazio di Banach e S ∶ R+ → B(X) un C0 -semigruppo. Definiamo
il seguente operatore lineare:
D(A) ∶= {u ∈ X ∣ lim+
t→0
S(t)u − u
esiste in X } ,
t
(5.10)
S(t)u − u
Au ∶= lim+
,
t→0
t
u ∈ D(A).
Tale operatore `e detto generatore (infinitesimo) di S.
5.3. CENNI SUL CASO DEL GENERATORE NON-LIMITATO
95
Si pu`
o dimostare che un semigruppo S(t) `e completamente identificato dal generatore cio`e che, se
due C0 -semigruppi S1 ed S2 hanno lo stesso generatore A, allora S1 ≡ S2 .
Se il generatore A `e un operatore limitato, allora risulta che S pu`o essere esteso a un gruppo,
che `e proprio il gruppo etA definito dalla serie esponenziale (5.7). Nel caso pi`
u generale, poich´e
il semigruppo `e identificato dal generatore, possiamo continuare ad adottare la scrittura etA (con
t ≥ 0), tenendo per`
o presente che, in generale, non vale lo sviluppo in serie esponenziale, n´e si pu`o
estendere il semigruppo a un gruppo.
Il collegamento fra questi concetti e il problema di evoluzione `e fornito dalla seguente generalizzazione del Teorema 5.11 (la dimostrazione si pu`o trovare in [23, 24, 25].
Teorema 5.15 Sia A ∶ D(A) → X generatore di un C0 -semigruppo etA . Per ogni u0 ∈ D(A), si
ha
d tA
e u0 = AetA u0 = etA Au0 ,
(5.11)
etA u0 ∈ D(A),
dt
e dunque la funzione u ∶ R+ → X, u(t) ∶= etA u0 , t ≥ 0, `e soluzione (regolare) del problema di
Cauchy
⎧
d
⎪
⎪
⎪
⎪ dt u(t) = Au(t), t > 0,
(5.12)
⎨
⎪
⎪
⎪ u(0) = u0 ∈ D(A).
⎪
⎩
Osservazione 5.16 Se u0 ∉ D(A), la funzione u(t) = etA u0 , ha ancora senso (poich´e etA `e un
operatore limitato che agisce su qualsiasi u0 ∈ X) ma non `e soluzione in senso stretto del problema
di evoluzione (5.12) (poich´e non `e detto che valgano le propriet`a (5.11)). Essa `e detta soluzione
“mild” del problema (5.12).
Osservazione 5.17 Eventuali condizioni al contorno lineari sono incorporate nella definizione del
dominio D(A). Consideriamo ad esempio il seguente problema di diffusione unidimensionale con
condizioni al bordo di Dirichlet:
⎧
ut (x, t) = uxx (x, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎨ u(0, t) = u(1, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = u0 (x),
x ∈ (0, 1),
t > 0,
t ≥ 0,
x ∈ [0, 1].
Il problema di Cauchy ad esso associato, ambientato per esempio nello spazio di Banach X =
C([0, 1]), `e del tipo (5.12), con
D(A) ∶= {u ∈ C 2 ([0, 1]) ∣ u(0) = u(1) = 0}
Au ∶= u′′ ,
u ∈ D(A).
Se u0 ∈ D(A) e A genera semigruppo allora, come abbiamo detto, la soluzione u(t) sta in D(A)
per ogni t ≥ 0 e quindi, in particolare, soddisfa le condizioni al contorno.
Esiste un teorema fondamentale, il Teorema di Hille e Yosida, che fornisce un insieme di condizioni necessario e sufficiente affinch´e un operatore lineare A ∶ D(A) → X sia generatore di un
C0 -semigruppo etA . Nella pratica applicativa il punto di partenza `e il problema di evoluzione,
rappresentato dall’operatore A, e l’analisi del problema consiste nel dimostrare che A `e generatore di semigruppo e, possibilmente, costruire il semigruppo stesso (ovvero la soluzione). Nel
caso A ∈ B(X) la situazione `e molto semplice: A genera un gruppo la cui costruzione esplicita `e
fornita dalla serie esponenziale (5.7). Nel caso di A non limitato, possiamo applicare il Teorema
96
CAPITOLO 5. SEMIGRUPPI
di Hille e Yosida per dimostrare che A `e un generatore, e quindi che il problema di evoluzione `e
ben posto. Tuttavia possiamo ancora chiederci: esiste una formula costruttiva in questo caso? La
serie esponenziale non ha pi`
u senso (se non in circostanze molto particolari); basti pensare che le
potenze di A non sono in generale ben definite. Ma pensiamo per un attimo alla semplice funzione
esponenziale complessa eta , con a ∈ C. Sappiamo bene che essa pu`o essere rappresentata sia in
termini di serie esponenziale, sia come limite
eta = lim (1 −
n→+∞
ta −n
) .
n
Questa rappresentazione risulta essere la chiave per costruire il semigruppo con generatore non limitato: si tratta di dare un senso alla corrispondente espressione in cui a `e sostituito dall’operatore
A, ovvero
−n
t
etA = lim (I − A) ,
t ≥ 0,
(5.13)
n→+∞
n
−n
dove (I − nt A)
−1 n
pu`
o essere naturalmente interpretato come [(I − nt A) ] . Basta ora scrivere
(I −
−1
−1
t −1
t n
n n
A) = [ ( I − A)] = ( I − A)
n
n t
t t
per rendersi conto che l’espressione (5.13) ha senso se
n
I
t
− A `e invertibile e
−1
n
( I − A) ∈ B(X),
t
almeno da un certo n in poi.
Definizione 5.18 Sia A ∶ D(A) ⊂ X → X un operatore lineare. Definiamo insieme risolvente di
A il sottoinsieme di C
ρ(A) = {λ ∈ C ∣ λI − A `e invertibile e (λI − A)
Se λ ∈ ρ(A), l’operatore imitato R(λ) = (λI − A)
σ(A) = C ∖ ρ(A) `e detto spettro di A.
−1
−1
∈ B(X) } .
`e detto operatore risolvente di A. L’insieme
L’analisi dell’insieme risolvente diventa quindi un ingrediente fondamentale per dimostrare la
validit`
a della formula (5.13) e quindi la generazione di semigruppo da parte di A. In particolare,
una delle condizioni del Teorema di Hille-Yosida `e che ρ(A) contenga una semiretta reale del
tipo (ω, +∞) per cui, per ogni t ≥ 0, si avr`a n/t ∈ ρ(A) per ogni n ≥ ωt e, di conseguenza,
−1
( nt I − A) ∈ B(X) per ogni n ≥ ωt.3
Esercizio 5.19 Supponiamo che λ ∈ C sia un autovalore di A, ovvero che esista u ∈ D(A) (u =/ 0)
tale che Au = λu. Dimostrare che λ ∈ σ(A).
Esempio 5.20 Cerchiamo l’insieme risolvente dell’operatore Laplaciano ∆ sullo spazio L2 (RN ),
con dominio
D(∆) = H2 = {u ∈ L2 (RN ) ∣ ∇α u ∈ L2 (RN ), ∀ ∣α∣ ≤ 2}
(5.14)
(dove ∇ indica il gradiente distribuzionale).
Come prima cosa osserviamo che, usando la (4.26), il dominio di ∆ pu`o essere caratterizzato anche
in termini di trasformate di Fourier:
D(∆) = {u ∈ L2 (RN ) ∣ k α u
ˆ ∈ L2 (RN ), ∀ ∣α∣ ≤ 2} .
3 Affinch´
eA
generi un gruppo, occorrer`
a che esistano due numeri reali ω+ e ω− tali che (−∞, ω− )∪(ω+ , +∞) ⊂ ρ(A).
5.3. CENNI SUL CASO DEL GENERATORE NON-LIMITATO
97
Analizzare l’insieme risolvente significa discutere l’invertibili`a dell’operatore λI − ∆ e le propriet`a
dell’operatore inverso. Consideriamo quindi l’equazione
(λI − ∆)u = g,
(5.15)
dove g ∈ L2 (RN ) `e fissato e, affinch´e l’equazione stessa abbia senso, la soluzione u va cercata in
D(∆). In trasformata di Fourier l’equazione diventa
2
(λ + ∣k∣ )ˆ
u(k) = gˆ(k),
che ha soluzione formale
u
ˆ(k) =
gˆ(k)
2
λ + ∣k∣
.
(5.16)
Si tratta ora di vedere quand’`e che questa formula fornisce effettivamente (l’espressione in trasformata di Fourier de) la soluzione del problema (5.15). Osserviamo che se λ `e reale negativo o
2
1
nullo, λ+∣k∣
a in ∣k∣ = −λ ed `e facile produrre esempi di funzioni g ∈ L2 (RN ) tali
2 ha una singolarit`
che
g
ˆ(k)
λ+∣k∣2
∉ L2 (RN ). Poich´e la solubilit`a dell’equazione (5.15) per ogni funzione g in L2 (RN ) `e
condizione necessaria affinch´e (λI − ∆)−1 ∈ B (L2 (RN )), possiamo affermare che (−∞, 0] ⊂/ ρ(∆)
(ovvero (−∞, 0] ⊂ σ(∆)). Se invece λ ∈/ (−∞, 0], chiaramente esiste una costante C > 0 tale che
∣
kα
2
λ + ∣k∣
∣ < C,
per ogni multi-indice α con ∣α∣ ≤ 2. Dunque la funzione u la cui trasformata di Fourier `e definita
dalla (5.16) appartiene a D(∆) e possiamo dire che
u = (λI − ∆)−1 g.
Inoltre,
2
2
∣ˆ
g (k)∣
2
∥u∥2 = ∥ˆ
u∥2 = ∫
RN
22
∣λ + ∣k∣ ∣
2
dk ≤ C 2 ∥g∥2 ,
il che dimostra che (λI − ∆)−1 ∈ B (L2 (RN )), e possiamo concludere che λ ∈ ρ(∆). In definitiva,
abbiamo dimostrato che
ρ(∆) = C ∖ (−∞, 0].
Esempio 5.21 Riprendiamo il precedente esempio e dimostriamo che ∆ `e il generatore del semigruppo del calore
1
−∣x−y∣2 /4t
[S(t)u] (x) =
u(y) dy
∫ Ne
N
/2
R
(4πt)
(cfr. (3.35)). Dobbiamo dimostrare che il limite
lim
t→0+
S(t)u − u
t
esiste (in L2 (RN )) se e solo se u ∈ D(∆), e che tale limite `e uguale a ∆u. Conviene anche in questo
caso guardare le cose attraverso la trasformazione di Fourier, per cui si ha
⎛ e−t∣k∣ − 1
S(t)u − u
2⎞
− ∆u) (k) =
+ ∣k∣ u
ˆ(k).
t
t
⎝
⎠
2
F(
Osservando che
e−t∣k∣ = 1 − t∣k∣ + R1 (t)
2
2
98
CAPITOLO 5. SEMIGRUPPI
e ricordando l’espressione del resto n-esimo nello sviluppo di Taylor in t0 di una funzione f (t) di
classe C n+1 in un intorno di t0 ,
Rn (t) =
potremo scrivere
t
1
n (n+1)
(τ ) dτ,
∫ (t − τ ) f
n! t0
RRR −t∣k∣2
RR
2
1
1 t
−1
4
2R
RRR e
+ ∣k∣ RRRRR = ∣R1 (t)∣ = ∫ (t − τ )∣k∣ e−τ ∣k∣ dτ
RRR
t
t 0
RRR t
RR
t
4
≤ ∣k∣ ∫
0
e−τ ∣k∣ dτ = ∣k∣ (1 − e−t∣k∣ ) ≤ ∣k∣
2
2
2
2
e, pertanto,
RRR⎛ −t∣k∣2
RRR2
2
−1
2⎞
2
RRR e
RRR dk ≤
+
∣k∣
u
ˆ
(k)
∣∣k∣
u
ˆ
(k)∣
dk.
∫ N RR
∫
R
RRR
t
R RR⎝
RN
⎠
R
R
Questa disuguaglianza ci permette di utilizzare il Teorema della convergenza dominata per concludere che, se u ∈ D(∆),
S(t)u − u
lim+ ∥
− ∆u∥ = 0.
t→0
t
2
Viceversa, supponiamo che esista in L2 (RN ) il limite
e−t∣k∣ − 1
u
ˆ.
t
2
vˆ = lim+
t→0
−t∣k∣2
Poich´e d’altra parte limt→0+ e t −1 u
ˆ(k) = −∣k∣ u
ˆ(k) (puntualmente), i risultati standard sugli
2
2
spazi Lp (si veda ad esempio [7]) ci dicono che vˆ(k) = −∣k∣ u
ˆ(k) quasi ovunque. Ma allora ∣k∣ u
ˆ∈
2
N
4
L (R ), ovvero u ∈ D(∆).
Abbiamo cos`ı dimostrato (cfr. Definizione 5.14) che ∆ `e il generatore di S(t) e scriveremo perci`o
S(t) = et∆ .
5.4
2
Sorgenti e perturbazioni
Consideriamo ora un problema di Cauchy con un termine di “sorgente”:
⎧
d
⎪
⎪
⎪
⎪ dt u(t) = Au(t) + q(t),
⎨
⎪
⎪
⎪
⎪
⎩ u(0) = u0 ∈ D(A),
t > 0,
(5.17)
dove q ∶ R+ → X `e una funzione assegnata. Supponiamo che A sia generatore di un C0 -semigruppo:
sappiamo allora che, se q ≡ 0, la soluzione del problema `e data da u(t) = etA u0 . Procediamo ora
formalmente per trovare una soluzione del problema completo (5.17). Supponiamo che u(t) sia
soluzione e poniamo
v(s) = e(t−s)A u(s),
0 ≤ s ≤ t.
Si pu`
o dimostrare facilmente che vale la regola “di Leibnitz”
d tA
detA
du(t)
e u(t) =
u(t) + etA
dt
dt
dt
4 Non `
e difficile infatti dimostrare che u ∈ H2 se e solo se u ∈ L2 e ∣k∣2 u
ˆ ∈ L2 . Basta infatti dimostrare che esistono
due costanti c1 > 0 e c2 > 0 tali che c1 (1 + ∣k∣2 ) ≤ ∣kα ∣ ≤ c2 (1 + ∣k∣2 ) per ogni multi-indice α con ∣α∣ ≤ 2 (si veda anche
[8]).
5.4. SORGENTI E PERTURBAZIONI
99
e quindi, ricordando anche la propriet`
a (5.11), potremo scrivere
d
d
v(s) = −Ae(t−s)A u(s) + e(t−s)A u(s)
ds
ds
= −Ae(t−s)A u(s) + e(t−s)A [Au(s) + q(s)] = e(t−s)A q(s).
Integrando fra 0 e t si ottiene
v(s) − v(0) = ∫
t
e(t−s)A q(s) ds
t
e(t−s)A q(s) ds.
0
ovvero, ricordando la definizione di v,
u(t) = etA u0 + ∫
(5.18)
0
Si pu`
o dimostrare che, sotto opportune ipotesi di regolarit`a5 , questa formula (che non `e altro che la
versione negli spazi di Banach della “formula di variazione delle costanti”) ci fornisce la soluzione
regolare del problema (5.17).
Passiamo ora a considerare il problema “perturbato”
⎧
d
⎪
⎪
⎪
⎪ dt u(t) = (A + B)u(t),
⎨
⎪
⎪
⎪
⎪
⎩ u(0) = u0 ∈ D(A),
t > 0,
(5.19)
dove A `e generatore di semigruppo e B ∈ B(X).6 Cominciamo a trattare il caso pi`
u semplice,
quello in cui A e B commutano, ovvero
ABu = BAu
per ogni u ∈ D(A) tale che Bu ∈ D(A).
Proposizione 5.22 Se A e B commutano, allora et(A+B) = etA etB = etB etA .
Dimostrazione Dimostriamo la proposizione nel caso semplice in cui A ∈ B(X), per cui la
formula esponenziale (5.7) vale per i tre gruppi etA , etB , et(A+B) . Poich´e, se AB = BA (e solo in
questo caso), si pu`
o scrivere la formula del binomio di Newton per gli operatori,
k
k
(A + B)k = ∑ ( )Ak−j B j ,
j=0 j
allora la dimostrazione dell’uguaglianza et(A+B) = etA etB `e identica alla dimostrazione dell’uguaglianza e(s+t)A = esA etA nella dimostrazione del Teorema 5.10 (scambiando opportunamente i ruoli
delle variabili t e s con quelli degli operatori A e B).
◻
Nel caso commutativo, abbiamo dunque una semplice rappresentazione del semigruppo generato
da A + B in termini di quelli generati separatamente da A e da B. In generale, se A e B non
commutano, il semigruppo generato da A+B non `e ricavabile in modo semplice e di solito si ricorre
all’approccio cosiddetto “perturbativo” che illustriamo qui di seguito.
5 Ad esempio, oltre a u ∈ D(A), si pu`
o richiedere q ∈ C 1 (R+ , X). Se si richiede solamente u0 ∈ X e q ∈
0
L1loc (R+ , X), la (5.18) `
e, per definizione, la soluzione mild del problema.
6 Si possono considerare anche perturbazioni non-limitate ma sono ben pi`
u difficili da trattare [1, 22, 24].
100
CAPITOLO 5. SEMIGRUPPI
Per provare a risolvere il problema (5.19) consideriamo il termine Bu(t) come se fosse un termine
“di sorgente” e usiamo la (5.18). Si ottiene allora un’equazione integrale per u(t):
u(t) = etA u0 + ∫
t
e(t−s)A Bu(s) ds
(5.20)
0
(detta talvolta formula di Duhamel) che possiamo risolvere col metodo delle “approssimazioni successive” (o di Neumann), ovvero come il limite della successione u(n) (t), ottenuta per sostituzione
ricorsiva della u(s) nell’equazione integrale (5.20):
⎧
u(0) (t) = etA u0
⎪
⎪
⎪
⎨
t
⎪
⎪
u(n+1) (t) = etA u0 + ∫ e(t−s)A Bu(n) (s) ds,
⎪
⎩
0
n ≥ 0.
(5.21)
Prima di dimostrare che tale successione ha limite, e che il limite `e soluzione della (5.20), osserviamo che scrivendo esplicitamente le sostituzioni ricorsive si ottiene l’espressione della soluzione
u(t) sotto forma di serie
u(t) = etA u0
t
+∫
0
e(t−s1 )A Bes1 A u0 ds1
t
+∫
s1
∫
0
0
t
+∫
0
e(t−s1 )A Be(s1 −s2 )A Bes2 A u0 ds1 ds2
s2
s1
∫
0
∫
0
(5.22)
e(t−s1 )A Be(s1 −s2 )A Be(s1 −s3 )A Bes3 A u0 ds1 ds2 ds3
+ ⋯,
detta serie di Dyson-Phillips, di cui le u(n) sono le somme parziali. L’utilit`a della formula (5.22)
`e chiara: anche quando conosciamo un’espressione esplicita di etA (e quindi del problema nonperturbato) `e in generale impossibile avere un’espressione esplicita della soluzione del problema
perturbato; la serie di Dyson-Phillips ci fornisce per`o la possibilt`a di esprimere tale soluzione in
termi espliciti con un grado di approssimazione (in linea di principio) arbitrario.
Dimostriamo ora la convergenza delle approssimazioni successive.
n
Lemma 5.23 Sia Y uno spazio di Banach e V ∈ B(Y ) un operatore limitato tale che ∑∞
n=0 ∥V ∥ <
−1
∞. Allora I − V `e invertibile, con (I − V ) ∈ B(Y ).
Dimostrazione Per il teorema di totale convergenza (si veda ad esempio [9] Cap. 2) si ha che
∞
∑n=0 V n converge in B(Y ). Poich´e inoltre, per ogni N fissato, si pu`o scrivere
N
N
N
N +1
n=0
n=0
n=0
n=0
n
n
n
n
∑ V (I − V ) = ∑ (I − V )V = ∑ V − ∑ V + I,
passando al limite per N → ∞ si ottiene
∞
∞
n=0
n=0
n
n
∑ V (I − V ) = ∑ (I − V )V = I,
n
−1
e dunque ∑∞
n=0 V = (I − V ) .
◻
Teorema 5.24 Siano X uno spazio di Banach, A ∶ D(A) → X un generatore di semigruppo
e B ∈ B(X). Allora, per ogni u0 ∈ X, la successione u(n) (t) definita da (5.21) converge a una
funzione continua u ∶ R+ → X che `e soluzione unica dell’equazione integrale (5.20). La convergenza
`e uniforme su intervalli limitati.
5.4. SORGENTI E PERTURBAZIONI
101
Dimostrazione Fissiamo T > 0 arbitrario e consideriamo lo spazio di Banach Y = C ([0, T ], X),
delle funzioni u ∶ [0, T ] → X continue, con la norma
∥u∥Y = sup ∥u(t)∥X .
t∈[0,T ]
Consideriamo inoltre l’operatore lineare V su Y cos`ı definito:
(V u) (t) = ∫
t
e(t−s)A Bu(s) ds.
0
Ricordando la Proposizione 5.7 possiamo scrivere, per ogni u ∈ Y ,
∥V u∥Y = sup ∥∫
t∈[0,T ]
t
e(t−s)A Bu(s) ds∥
0
X
≤ T M eωT ∥B∥∥u∥Y
e dunque V ∈ B(Y ). Osserviamo che, posto g(t) = etA u0 , l’equazione integrale (5.20), le approssimazioni successive (5.21) e la serie di Dyson-Phillips (5.22) possono essere interpretate nello spazio
Y come, rispettivamente, l’equazione
u = g + V u,
la successione ricorsiva
(5.23)
(0)
⎧
⎪
⎪u = g
⎨ (n+1)
⎪
⎪
= V u(n) + g,
⎩u
e la serie
(5.24)
n ≥ 0.
∞
u = ∑ V ng
(5.25)
n=0
` dunque chiaro che, se dimostriamo che V
(di cui u(n) = ∑nk=0 V k g sono sono le somme parziali). E
soddisfa le ipotesi del Lemma 5.23, l’equazione (5.23) ha soluzione unica data da
∞
u = (I − V )−1 g = ∑ V n g
n=0
il che significa che (almeno per t ∈ [0, T ]) l’equazione integrale (5.20) ha un’unica soluzione continua, data dalla serie di Dyson-Phillips. Essendo T arbitrario si sar`a cos`ı dimostrato che la
soluzione esiste (ed `e unica e continua) per tutti i tempi t ≥ 0. Il problema si riduce quindi a
n
dimostrare che la serie ∑∞
e convergente (dove naturalmente ∥V n ∥ `e la norma di V n in
n=0 ∥V ∥ `
B(Y )). A questo scopo osserviamo che, per ogni t ∈ [0, T ] e per ogni u ∈ Y , si ha
∥(V u) (t)∥X = ∥∫
t
e(t−s)A Bu(s) ds∥
0
X
≤ α∫
t
0
∥u(s)∥X ds ≤ tα∥u∥Y
(dove si `e posto α = M eT ω ∥B∥), e dunque
∥(V 2 u)(t)∥X ≤ α ∫
t
0
∥(V u) (s)∥X ds ≤ α2 ∥u∥Y ∫
e cos`ı via. Per induzione si pu`
o facilmente dimostrare che
∥(V n u) (t)∥X ≤
(αt)n
∥u∥Y ,
n!
da cui, passando al sup su t ∈ [0, T ], si ricava subito
∥V n ∥ ≤
(αT )n
.
n!
t
0
s ds = α2 ∥u∥Y
t2
2
102
CAPITOLO 5. SEMIGRUPPI
Pertanto
∞
∞
(αT )n
= eαT < ∞
n!
n=0
n
∑ ∥V ∥ ≤ ∑
n=0
◻
e il teorema `e cos`ı dimostrato.
Per concludere questo paragrafo menzioniamo un altro risultato che fornisce un diverso metodo
di approssimazione della soluzione del problema perturbato. Tale risultato `e la formula di Trotter
(5.26) che ci dice in sostanza che l’azione del semigruppo et(A+B) pu`o essere approssimata dividendo
l’intervallo temporale [0, t] in n parti uguali, su ciascuna delle quali si fanno agire separatamente
e alternativamente i due semigruppi etA ed etB . Per n → ∞ si ottiene esattamente l’azione di
et(A+B) .
Teorema 5.25 Siano X uno spazio di Banach, A ∶ D(A) → X un generatore di semigruppo e
B ∈ B(X). Supponiamo che per etA valga la stima (5.6) con M = 1. Allora, per ogni u0 ∈ X e
t ≥ 0, si ha
t
t
n
et(A+B) u0 = lim (e n A e n B ) u0
n→∞
(5.26)
In pratica, questo risultato ci dice che, su tempi piccoli, possiamo trascurare il commutatore
AB − BA. La dimostrazione del Teorema 5.25 si pu`o trovare (sotto ipotesi pi`
u generali) in [24]
e [25]. La formula di Trotter trova un’importante applicazione nel campo dell’analisi numerica,
fornendo una giustificazione teorica del cosiddetto split-step method.
5.5
Equazione di trasporto con collisioni
In questo paragrafo vogliamo applicare la teoria dei semigruppi (e in particolare la serie di DysonPhillips) allo studio della equazione del trasporto, che descrive la dinamica di un insieme statistico
di particelle interagenti con l’ambiente circostante. Tale equazione, nelle sue numerose varianti, `e
usata in importanti applicazioni tra cui l’ingegneria nucleare (dinamica dei neutroni in un reattore),
l’astrofisica e la geofisica (passaggio di fotoni attraverso nubi interstellari o atmosfere planetarie)
e l’ingegneria elettronica (dinamica degli elettroni in un semiconduttore).
Mostriamo brevemente come si pu`
o ricavare l’equazione del trasporto nella sua forma pi`
u basilare,
rimandando al libro di Duderstadt e Martin [27] i lettori interessati a maggiori approfondimenti.
Si consideri una popolazione di particelle identiche descritte da una funzione di densit`a nello spazio
delle fasi, f (x, v, t), per cui
∫ f (x, v, t) dx dv
R
=
numero di particelle che all’istante t si trovano nella regione
R ⊂ R6 dello spazio delle fasi.
In completa assenza di interazioni le particelle si muoveranno per pura inerzia e dunque la loro
densit`
a si manterr`
a costante lungo le traiettorie nello spazio delle fasi corrispondenti alle equazioni
di Newton
x(t)
˙
= v(t),
v(t)
˙
= 0.
(5.27)
Derivando f lungo tali traiettorie si otterr`a perci`o
0=
d
f (x(t), v(t), t) = x˙ ⋅ ∇x f + v˙ ⋅ ∇v f + ft = v ⋅ ∇x f + ft ,
dt
da cui segue l’equazione di trasporto “libero”
ft (x, v, t) = −v ⋅ ∇x f (x, v, t)
(5.28)
5.5. EQUAZIONE DI TRASPORTO CON COLLISIONI
103
(che `e esattamente la (3.32), gi`
a studiata nel capitolo 3). Supponiamo ora che le particelle interagiscano con il mezzo circostante a causa di “urti” che ne cambiano istantaneamente la velocit`a.
La densit`
a f non sar`
a pi`
u costante lungo le traiettorie (5.27) perch´e ogni particella ha una certa
probabilit`
a di subire un urto che ne modifica la velocit`a, e di essere cos`ı spostata da un punto a un
altro dello spazio delle fasi (la x per`
o rimane costante se supponiamo che l’urto sia localizzato).
Per quantificare questo fenomeno, detto scattering, descriviamo ogni urto tramite una velocit`a
pre-collisionale vpre e una velocit`
a post-collisionale vpost , e tramite la funzione
k(vpre , vpost )
=
probabilit`a per unit`a di tempo e per unit`a di volume nello
spazio delle velocit`a vpost (condizionata alla presenza di una
particella con velocit`a vpre ) che una particella con velocit`a
vpre subisca un urto e ne riemerga con una velocit`a vpost .
La funzione k(vpre , vpost ) `e detta nucleo di scattering.7 Fissato dunque un punto (x, v) nello spazio
delle fasi, in tale punto avremo:
• una variazione negativa di densit`a, − ∫R3 k(v, v ′ )f (x, v, t)dv ′ , dovuta alle particelle che scompaiono per unit`
a di tempo da (x, v) perch´e la loro velocit`a era v ed `e diventata una certa v ′
(out-scattering);
• una variazione positiva di densit`
a, ∫R3 k(v ′ , v)f (x, v ′ , t)dv ′ , dovuta alle particelle che compaiono per unit`
a di tempo in (x, v) perch´e la loro velocit`a era v ′ ed `e diventata v (in-scattering);
Integrando su tutte le possibili velocit`
a v ′ si ottiene il seguente bilancio lungo le traiettorie
d
f (x, v, t) = − ∫ k(v, v ′ )f (x, v, t) dv ′ + ∫ k(v ′ , v)f (x, v ′ , t) dv ′
dt
R3
R3
= −σ(v)f (x, v, t) + ∫
R3
k(v ′ , v)f (x, v ′ , t) dv ′
dove si `e sottointeso x = x(t), v = v(t) e si `e posto
σ(v) = ∫
R3
k(v, v ′ ) dv ′ .
Si ottiene cos`ı la seguente equazione di trasporto collisionale che supporremo, per semplicit`a, essere
posta su tutto lo spazio delle fasi (e quindi senza condizioni al contorno) e che corrediamo di un
dato iniziale:
⎧
′
′
′
⎪
⎪
⎪ ft (x, v, t) = −v ⋅ ∇x f (x, v, t) − σ(v) f (x, v, t) + ∫R3 k(v , v) f (x, v , t) dv
⎨
⎪
⎪ f (x, v, 0) = f0 (x, v),
⎪
(x, v) ∈ R6 , t ≥ 0.
⎩
(5.29)
Nel seguito supporremo che la funzione k(v ′ , v) sia non negativa, integrabile rispetto a v ′ e tale
che
σ(v) = ∫ k(v, v ′ ) dv ′ ≤ σ∞ ,
(5.30)
R3
con σ∞ costante non negativa.
Vogliamo ora analizzare il problema ai valori iniziali (5.29) mediante la teoria dei semigruppi.
Come prima cosa dobbiamo scegliere uno spazio di Banach in cui inquadrare il problema. Dal
momento che, per ogni t fissato, l’integrale
N (t) = ∫
7 Per
R6
f (x, v, t) dx dv
semplicit`
a stiamo supponendo che il mezzo circostante sia omogeneo per cui k non dipende da x.
104
CAPITOLO 5. SEMIGRUPPI
ha il significato fisico di numero totale di particelle al tempo t, `e chiaro che f (x, v, t) deve essere
integrabile rispetto a x e v per ogni t. La scelta naturale cade quindi sullo spazio di Banach
X = L1 (R6 , R).
Interpretiamo dunque (5.29) come il seguente problema di evoluzione in X:
⎧
d
⎪
⎪
⎪
⎪ dt f (t) = (A + B) f (t),
⎨
⎪
⎪
⎪
⎪
⎩ f (0) = f0 ∈ X,
t > 0,
(5.31)
dove gli operatori A e B sono definiti nel modo seguente:
⎧
⎪
⎪
⎪ (Af ) (x, v) = −v ⋅ ∇x f (x, v) + σ(v) f (x, v),
⎨
⎪
⎪
⎪
⎩ D(A) = {f ∈ X ∣ v ⋅ ∇x f ∈ X} ,
⎧
′
′
′
⎪
⎪
⎪ (Bf ) (x, v) = ∫R3 k(v , v) f (x, v ) dv ,
⎨
⎪
⎪ D(B) = X.
⎪
⎩
Ricavare (formalmente) il semigruppo generato da A significa risolvere il problema
(5.32)
(5.33)
⎧
⎪
⎪ ft (x, v, t) = −v ⋅ ∇x f (x, v, t) − σ(v) f (x, v, t)
⎨
⎪
(x, v) ∈ R6 , t ≥ 0,
⎪
⎩ f (x, v, 0) = f0 (x, v),
il che pu`
o essere fatto direttamente oppure osservando che la funzione
g(x, v, t) = eσ(v)t f (x, v, t)
deve soddisfare il problema (3.32) (con dato iniziale g(x, v, 0) = f0 (x, v)). Dall’analisi svolta a suo
tempo sappiamo che la soluzione `e
g(x, v, t) = f0 (x − tv, v)
e dunque
f (x, v, t) = e−σ(v)t f0 (x − tv, v).
Abbiamo perci`
o individuato formalmente8 l’azione del semigruppo (anzi, del gruppo) generato da
A, che indicheremo con T (t),
(T (t)f ) (x, v) = e−σ(v)t f (x − tv, v),
f ∈ X.
(5.34)
Per quanto riguarda l’operatore B, sfruttando il fatto che k `e una funzione non-negativa e
utilizzando la (5.30), si ha
∥Bf ∥ = ∫
∫
R6
∫
R3
R6
∣∫
R3
k(v ′ , v) f (x, v ′ ) dv ′ ∣ dx dv ≤
k(v ′ , v) ∣f (x, v ′ )∣ dv ′ dx dv = ∫
R6
σ(v)∣f (x, v)∣ dx dv ≤ σ∞ ∥f ∥X
per ogni f ∈ X. Dunque Bf `e effettivamente definito per ogni f ∈ X e inoltre B ∈ B(x), con
∥B∥ ≤ σ∞ .
8 Per dimostrare rigorosamente che A `
e il generatore del gruppo definito dalla (5.34) si dovrebbe applicare la
Definizione 5.14. In particolare, si dovrebbe dimostrare che il dominio D(A), definito nella (5.32), `
e proprio il
dominio del generatore come definito nella (5.10).
5.5. EQUAZIONE DI TRASPORTO CON COLLISIONI
105
Siamo perci`
o nelle ipotesi del Teorema 5.24 e possiamo concludere che la soluzione del problema
di trasporto (5.31) (o meglio, della sua versione integrale) `e data dalla serie di Dyson-Phillips
f (t) = T (t) f0
+∫
+∫
t
0
T (t − s1 ) B T (s1 ) f0 ds1
t
0
s1
∫
0
T (t − s1 ) B T (s1 − s2 )B T (s2 ) f0 ds1 ds2
(5.35)
+⋯
` interessante notare che i termini di questa serie hanno un significato fisico ben preciso. Fissiamo
E
infatti un punto (x, v) nello spazio delle fasi e un istante di tempo t. Il primo termine della serie,
(T (t) f0 ) (x, v) = e−σ(v)t f0 (x − tv, v),
`e il contributo di tutte quelle particelle che sono arrivate nel punto x con velocit`a v senza aver
subito urti: non avendo mai modificato la loro velocit`a esse si trovavano nel punto x − vt all’istante
iniziale (t = 0). Il fattore di attenuazione e−σ(v)t tiene conto delle altre particelle che si trovavano in
x−vt all’istante iniziale e che invece hanno subito urti. Nella Figura 5.2 (a) abbiamo rappresentato
questa situazione: la linea tratteggiata rappresenta la dinamica “libera” e−σ(v)t f0 (x − tv, v).
t
Il secondo termine della serie, ∫0 T (t − s1 ) B T (s1 ) f0 ds1 , rappresenta il contributo di quelle particelle che sono arrivate nel punto x con velocit`a v avendo subito un solo urto all’istante s1
(contributo integrato si tutti i possibili istanti dell’urto, 0 ≤ s1 ≤ t). Questa situazione `e rappresentata graficamente nella Figura 5.2 (b): tali particelle hanno viaggiato per un tempo s1 con
velocit`
a v ′ , hanno subito un urto all’istante s1 che ha cambiato la loro velocit`a da v ′ a v, dopodich´e hanno viaggiato indisturbate per un tempo t − s1 . Dunque, queste particelle si trovavano
nel punto x − v(t − s1 ) − v ′ s1 all’istante iniziale. Le altre particelle che si trovavano nel medesimo
punto all’istante iniziale, ma che hanno avuto storie differenti (ad esempio pi`
u di un urto, o un
solo urto con velocit`
a post-collisionale diversa da v), sono sparite in ragione del solito fattore di
attenuazione presente nella dinamica libera.
Analogamente, il termine successivo nella serie di Dyson-Phillips rappresenta il contributo delle
particelle che hanno subito due urti (Figura 5.2 (c)), e cos`ı via nei termini successivi.
106
CAPITOLO 5. SEMIGRUPPI
Figura 5.2: Interpretazione dei primi tre termini della serie di Dyson-Phillips (5.35)
Appendice A
Richiami su spazi lineari, spazi Lp
e integrale di Lebesgue
Riportiamo in questa appendice un brevissimo compendio di definizioni e risultati sugli spazi
lineari, e in particolare sugli spazi Lp , utlizzati frequentemente in queste dispense.
` un insieme V su cui sono definite
Definizione A.1 (Spazio vettoriale (o lineare) su C) E
le seguenti operazioni:
somma (v, w) ∈ V × V ↦ v + w ∈ V , tale che (V, +) sia un gruppo commutativo (elemento neutro
0, opposto −v)
prodotto per scalare (α, v) ∈ C × V ↦ αv ∈ V , tale che:
i) α(βv) = (αβ)v e 1v = v,
ii) α(v + w) = αv + αw e (α + β)v = αv + βv.
◻
` uno spazio vettoriale e topologico X tale
Definizione A.2 (Spazio vettoriale topologico) E
che:
i) i punti sono chiusi,
ii) le operazioni di somma e di prodotto per scalare sono continue.
◻
` uno spazio vettoriale X con una funzione
Definizione A.3 (Spazio vettoriale normato) E
∥⋅∥ ∶ X → [0, +∞) tale che:
i) ∥v∥ = 0 se e solo se v = 0,
ii) ∥v + w∥ ≤ ∥v∥ + ∥w∥,
iii) ∥αv∥ = ∣α∣∥v∥,
v, w ∈ X,
v ∈ X, α ∈ C.
◻
Uno spazio vettoriale normato `e anche uno spazio metrico con la distanza
d(v, w) ∶= ∥w − v∥
e quindi `e anche uno spazio topologico con la topologia “metrica”, in cui un sottoinsieme A ⊂ X
`e aperto se e solo se per ogni x0 ∈ A esiste r > 0 tale che
{x ∈ X ∣ d(x, x0 ) < r} ⊂ A.
Si dimostra facilmente che la topologia indotta dalla norma rende X uno spazio vettoriale topologico.
107
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI LP
108
` uno spazio vettoriale normato completo rispetto alDefinizione A.4 (Spazio di Banach) E
la topologia indotta dalla norma [ricordiamo che uno spazio topologico X `e completo se ogni
successione di Cauchy in X converge a un qualche punto di X].
` uno spazio di Banach X la cui norma `e indotta da un
Definizione A.5 (Spazio di Hilbert) E
prodotto Hermitiano ⟨⋅, ⋅⟩ ∶ X × X → C, tale che1
i) ⟨v + w, u⟩ = ⟨v, u⟩ + ⟨w, u⟩ e ⟨αv, u⟩ = α⟨v, u⟩ per ogni u, v, w ∈ X e α ∈ C,
ii) ⟨v, w⟩ = ⟨w, v⟩, per ogni v, w ∈ X,
iii) ⟨v, v⟩ ≥ 0 per ogni v ∈ X, e ⟨v, v⟩ = 0 se e solo se v = 0.
√
La norma indotta `e ∥v∥ ∶= ⟨v, v⟩.
Negli spazi di Hilbert vale la Disuguaglianza di Schwartz
∣⟨v, w⟩∣ ≤ ∥v∥ ∥w∥,
che ci dice, fra l’altro, che ⟨⋅, ⋅⟩ `e continuo rispetto alla topologia indotta da ∥⋅∥.
Un esempio molto importante di spazi di Banach `e quello degli spazi Lp . Sia Ω un sottoinsieme
aperto di RN e sia 1 ≤ p < +∞; definiamo:
p
Lp (Ω) ∶= {f ∶ Ω → C ∣ f `e misurabile e ∫ ∣f (x)∣ dx < ∞ } / ∼
Ω
dove
f ∼ g ⇐⇒ mis {x ∈ Ω ∣ f (x) =/ g(x)} = 0.
Se f ∈ Lp (Ω), definiamo
p
1/p
∥f ∥p ∶= (∫ ∣f (x)∣ dx)
Ω
(f `e un qualunque rappresentante della classe di equivalenza). Si ha:
• ∥f ∥p ≥ 0 (ovvio);
• ∥f ∥p = 0 ⇔ f = 0 (perch´e f = 0 significa “f = 0 q. o.”);
• ∥f + g∥p ≤ ∥f ∥p + ∥g∥p (Teorema: Disuguaglianza di Minkowski);
• ∥α f ∥p = ∣α∣ ∥f ∥p (ovvio).
Dunque ∥⋅∥p `e una norma su Lp (Ω). Inoltre, si pu`o dimostrare che, se {fn } ⊂ Lp (Ω) `e una
successione di Cauchy rispetto a ∥⋅∥p , esiste f ∈ Lp (Ω) tale che ∥fn − f ∥p → 0; dunque Lp (Ω) `e
uno spazio di Banach (questo risultato `e noto anche come Teorema di Riesz-Fisher).
Lo spazio L∞ (Ω) `e definito da
L∞ (Ω) ∶= {f ∶ Ω → C ∣ f `e misurabile e ess sup ∣f ∣ < +∞ } / ∼
con la norma
∥f ∥∞ = ess sup ∣f ∣ ∶= inf {M ≥ 0 ∣ mis {x ∈ Ω ∶ ∣f (x)∣ > M } = 0}.
Si dimostra che anche L∞ (Ω) `e uno spazio di Banach.
1 In queste dispense utilizziamo la convenzione, pi`
u comune nella letteratura matematica, della linearit`
a a sinistra.
Spesso, soprattutto nei testi di fisica, si usa la convenzione opposta.
109
Un importante risultato sugli spazi Lp `e la disuguaglianza di H¨
older: siano 1 ≤ p, p′ ≤ ∞ tali che
1 1
+ =1
p p′
(p e p′ si dicono esponenti coniugati);
′
allora, se f ∈ Lp (Ω) e g ∈ Lp (Ω), si ha f g ∈ L1 (Ω) e
∫ ∣f (x) g(x)∣dx ≤ ∥f ∥p ∥g∥p′ .
Ω
Osserviamo che p = 2 `e coniugato di se stesso per cui se f, g ∈ L2 (Ω), si ha f g ∈ L1 (Ω). Si pu`o
perci`
o definire ⟨⋅, ⋅⟩ ∶ L2 (Ω) × L2 (Ω) → C:
⟨f, g⟩ ∶= ∫ f (x) g(x) dx,
Ω
√
che risulta essere un prodotto Hermitiano. Si ha ovviamente che ∥f ∥2 = ⟨f, f ⟩ e che vale la
disuguaglianza di Schwartz (`e infatti data dalla disuguaglianza di H¨older con p = p′ = 2). Possiamo
perci`
o concludere che L2 (Ω) `e uno spazio di Hilbert.
Osservazione A.6 Osserviamo che se mis Ω < ∞ e 1 ≤ p ≤ q ≤ ∞, allora Lq (Ω) ⊂ Lp (Ω). Infatti,
se f ∈ Lq (Ω), applicando la disuguaglianza di H¨older alle funzioni
′
1 ∈ L(q/p) (Ω)
p
∣f ∣ ∈ Lq/p (Ω),
possiamo scrivere
p
q
∫ ∣f (x)∣ dx ≤ (∫ ∣f (x)∣ dx)
Ω
p/q
Ω
1−p/q
(∫ 1 dx)
Ω
p
= ∥f ∥q (mis Ω)
1−p/q
< +∞,
il che dimostra che f ∈ Lp (Ω). Notiamo che abbiamo dimostrato anche che vale la relazione fra le
norme
∥f ∥p ≤ C ∥f ∥q ,
1≤p≤q≤∞
(A.1)
1
−1
dove C = (mis Ω) p q `e una costante che dipende solo da mis Ω, da p e da q. Se invece mis Ω = ∞,
si possono trovare esempi di funzioni che stanno in Lq (Ω) ma non in Lp (Ω) [esercizio].
Osservazione A.7 Tutto quello che abbiamo detto finora sugli spazi Lp si potrebbe generalizzare
sostituendo (Ω, dx) con uno spazio di misura qualunque (purch´e separabile).
Enunciamo un risultato spesso utilizzato in questo corso. La dimostrazione si pu`o trovare, ad
esempio, in [7].
Teorema A.8 Sia Ω ⊂ RN un aperto. Allora C0∞ (Ω), lo spazio delle funzioni C ∞ a supporto
compatto in Ω, `e denso in Lp (Ω), per ogni 1 ≤ p < ∞.
Ricordiamo inoltre alcuni importanti risultati della teoria dell’integrazione secondo Lebesgue.
Teorema A.9 (di Tonelli) Siano Ω1 un aperto di RN e Ω2 un aperto di RM . Sia F ∶ Ω1 ×Ω2 → C
misurabile e non negativa. Allora le funzioni ∫Ω2 F (⋅, y) dy e ∫Ω1 F (x, ⋅) dx sono misurabili e
∫
Ω1 ×Ω2
F (x, y) dx dy = ∫
Ω1
{∫
Ω2
F (x, y) dy} dx = ∫
Ω2
{∫
Ω1
F (x, y) dx} dy
(eventualmente = +∞).
Teorema A.10 (di Fubini) Se F ∶ Ω1 × Ω2 → C `e integrabile allora ∫Ω2 F (⋅, y) dy e ∫Ω1 F (x, ⋅) dx
sono integrabili q.o. e valgono le uguaglianze precedenti.
APPENDICE A. RICHIAMI SU SPAZI LINEARI E SPAZI LP
110
Teorema A.11 (della convergenza dominata) Sia Ω un aperto di RN e fn una successione
di funzioni integrabili su Ω tali che
i) lim fn (x) = f (x) per q.o. x ∈ Ω;
n→∞
ii) esiste g integrabile su Ω tale che ∣fn (x)∣ ≤ g(x) q.o. in Ω, per ogni n ∈ N;
allora f `e integrabile e
lim ∫ fn (x) dx = ∫ f (x) dx.
n→∞
Ω
Ω
Infine, sar`
a utile ricordare il sistema delle coordinate polari in RN :
⎧
x1 = ρ cos θ1
⎪
⎪
⎪
⎪
⎪
⎪
⎪
x2 = ρ sin θ1 cos θ2
⎪
⎪
⎪
⎪
⎨⋯
⎪
⎪
⎪
⎪
⎪
xN −1 = ρ sin θ1 ⋯ sin θN −2 cos θN −1
⎪
⎪
⎪
⎪
⎪
⎪
⎩ xN = ρ sin θ1 ⋯ sin θN −2 sin θN −1
ρ > 0,
0 < θi < π
(A.2)
(1 ≤ i ≤ N − 2),
0 < θN −1 < 2π.
Il determinante Jacobiano della trasformazione `e
ρN −1 sinN −2 θ1 sinN −3 θ2 ⋯ sin θN −2 .
(A.3)
La misura della superficie della sfera unitaria SN −1 in RN `e perci`o
mis(SN −1 ) ∶= ωN −1
=∫
0
π
dθ1 ⋯ ∫
π
2π
dθN −2 ∫
0
e risulta
ωN −1 =
0
dθN −1 sinN −2 θ1 sinN −3 θ2 ⋯ sin θN −2
2π N /2
,
Γ ( N2 )
(A.4)
dove Γ(x) `e la funzione Gamma di Eulero:
Γ(x) = ∫
+∞
e−t tx−1 dt,
0
x > 0.
(A.5)
Utilizzando le propriet`
a
Γ(x + 1) = x Γ(x),
Γ(1) = 1,
Γ (1/2) = π 1/2 .
ω2 = 4π,
ω3 = 2π 2 ,
si possono ricavare tutti i valori di ωN −1 :
ω0 = 2,
ω1 = 2π,
⋯
Appendice B
Esercizi
Esercizi sul capitolo 1
1 [⋆] Calcolare i coefficienti di Fourier della seguenti funzioni definite per x ∈ (−π, π]:
⎧
⎪
⎪ α, se x ∈ (0, π],
f1 (x) = ⎨
⎪
⎪
⎩ −α, se x ∈ (−π, 0],
⎧
⎪
⎪ α, se x ∈ (0, π],
f2 (x) = ⎨
⎪
⎪
⎩ 0, se x ∈ (−π, 0],
f3 (x) = x
⎧
2x
⎪
⎪
− 1∣, se x ∈ (0, π],
1−∣
⎪
⎪
⎪
π
f4 (x) = ⎨
⎪
2x
⎪
⎪
∣
+ 1∣ − 1, se x ∈ (−π, 0],
⎪
⎪
⎩ π
con α costante reale.
2 [⋆] Siano f e g funzioni 2π-periodiche, integrabili su un periodo. Calcolare i coefficienti di
Fourier del prodotto f g (supponendo che sia integrabile) e della convoluzione f ⋆ g in funzione dei
coefficienti di Fourier fn e gn . di f e g.
3 [⋆⋆] Risolvere il seguente problema di diffusione “nella sbarretta” con dati di Dirichlet nonomogenei e dipendenti dal tempo:
⎧
ut (x, t) = cuxx (x, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(0, t) = α(t),
⎨
⎪
u(`, t) = β(t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x).
111
x ∈ (0, `), t > 0,
112
APPENDICE B. ESERCIZI
4 [⋆⋆] Risolvere il seguente problema differenziale:
⎧
utt (x, t) − c2 uxx (x, t) + m2 u(x, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ u(0, t) = u(`, 0) = 0,
⎨
⎪
u(x, 0) = ϕ(x),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ ut (x, 0) = ψ(x),
x ∈ (0, `), t ∈ R,
con c ed m costanti assegnate.
5 [⋆⋆] Risolvere il seguente problema differenziale:
⎧
⎪
ut (x, t) + uxxxx (x, t) = 0,
⎪
⎪
⎪
⎪
⎨ u(0, t) = u(π, 0) = 0,
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x).
x ∈ (0, π), t ∈ R,
6 [⋆⋆] Risolvere il seguente problema differenziale nel rettangolo R = (0, a) × (0, b).
⎧
uxx + uyy = 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ uy (x, 0) = uy (x, b) = 0,
⎨
⎪
u(0, y) = 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ u(b, y) = ϕ(y),
(x, y) ∈ R,
x ∈ (0, a),
y ∈ (0, b)
y ∈ (0, b),
con ϕ(y) assegnata.
7 [⋆ ⋆ ⋆] Posto D = {x2 + y 2 < r2 }, con r > 0, risolvere il problema differenziale
⎧
⎪
⎪ uxx + uyy = 0,
⎨
⎪
⎪
⎩ u∣∂D = f,
in D,
con f assegnata su ∂D.
8 [⋆ ⋆ ⋆] Siano ω > 0 e c > 0 assegnati. Trovare le soluzioni del problema
⎧
⎪
⎪ ut (x, t) = c uxx (x, t),
⎨
⎪
⎪
⎩ u(0, t) = sin(ωt),
x ∈ (0, +∞), t ∈ R
che siano T -periodiche in t (con T = 2π/ω) e limitate.
Esercizi sul capitolo 2
9 [⋆⋆] Fissati r > 0, L > 0 si consideri il cilindro
C = {(x, y, z) ∈ R3 ∣ x2 + y 2 < r2 , 0 < z < L} .
Si risolva il seguente problema agli autovalori:
⎧
⎪
⎪ ∆u + Eu = 0,
⎨
⎪
⎪
⎩ u∣∂C = 0,
in C,
113
dove (u, E) `e la coppia incognita autofunzione-autovalore.
10 [⋆ ⋆ ⋆] Fissato r > 0 e posto D = {x ∈ R3 ∣ ∣x∣ > r}, risolvere il seguente problema differenziale:
⎧
∆u = 0, in D,
⎪
⎪
⎪
⎪
⎪
⎪
⎨ u∣∂D = f,
⎪
⎪
⎪
lim u(x) = 0,
⎪
⎪
⎪
⎩ ∣x∣→∞
dove f `e una funzione assegnata sulla sfera ∣x∣ = r.
11 [⋆⋆] Fissati c > 0 e r > 0, e posto D = {x ∈ R2 ∣ ∣x∣ < r}, risolvere il seguente problema
differenziale:
⎧
⎪
ut (x, t) = c∆2 u(x, t) = 0, x ∈ D, t > 0,
⎪
⎪
⎪
⎪
⎨ u(x, t) = 0, x ∈ ∂D, t ≥ 0,
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x), x ∈ D,
dove ∆2 = ∆∆ e ϕ `e una funzione assegnata.
12 [⋆⋆] Discutere il seguente problema di diffusione nell’intervallo (0, `) con coefficiente dipendente
da x:
⎧
⎪
ut (x, t) = c(x) uxx (x, t),
x ∈ (0, `), t > 0,
⎪
⎪
⎪
⎪
⎨ u(0, t) = u(`, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x).
13 [⋆ ⋆ ⋆] Risolvere il seguente problema di diffusione nell’intervallo (0, `) con condizioni agli
estremi di tipo misto:
⎧
ut (x, t) = cuxx (x, t),
x ∈ (0, `), t > 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ ux (0, t) = 0,
⎨
⎪
ux (`, t) + αu(`, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩ u(x, 0) = 1,
dove c > 0 e α ∈ R sono costanti assegnate.
Esercizi sul capitolo 3
14 [⋆] Calcolare la trasformata di Fourier delle seguenti funzioni:
f (x) = e−α∣x∣
f (x) = e−αx H(x)
f (x) =
1
1 + iαx
(dove α > 0 `e fissato e H indica la funzione di Heaviside).
114
APPENDICE B. ESERCIZI
15 [⋆⋆] Calcolare i momenti della distribuzione normale a media nulla:
√
1
2πσ 2
∫
+∞
−∞
xr e−x
2
/2σ 2
dx,
con r ≥ 0 intero (e σ > 0 fissato).
16 [⋆⋆] Calcolare la trasformata di Fourier delle funzione
⎧
⎪
⎪ 1 − ∣x∣, se ∣x∣ ≤ 1,
Λ(x) = ⎨
⎪
se ∣x∣ > 1.
⎪
⎩ 0,
17 [⋆⋆] Utilizzare il risultato del precedente esercizio per calcolare
∫
+∞
−∞
xr Λ(x) dx
per ogni intero r ≥ 0.
18 [⋆⋆] Posto R = {(x, y) ∈ R2 ∣ 0 ≤ x ≤ π}, risolvere il seguente problema di diffusione su R:
⎧
⎪
ut (x, y, t) = ∆u(x, y, t),
⎪
⎪
⎪
⎪
⎨ u(0, y, t) = u(π, y, t) = 0,
⎪
⎪
⎪
⎪
⎪
⎩ u(x, y, 0) = ϕ(x, y).
(x, y) ∈ R, t > 0,
19 [⋆] Risolvere il seguente problema differenziale:
⎧
⎪
⎪ ut (x, t) = auxx (x, t) + bux (x, t) + cu(x, t),
⎨
⎪
⎪
⎩ u(x, 0) = ϕ(x),
x ∈ R, t > 0,
con a, b e c costanti assegnate.
20 [⋆⋆] Risolvere il seguente problema di diffusione sulla retta con coefficiente di diffusione e
sorgente dipendenti dal tempo:
⎧
⎪
⎪ ut (x, t) = a(t) uxx (x, t) + b(t),
⎨
⎪
⎪
⎩ u(x, 0) = ϕ(x).
x ∈ R,
t > 0,
21 [⋆⋆] Risolvere il seguente sistema di equazioni del prim’ordine nelle incognite u(x, t) e v(x, t),
con x ∈ R e t > 0:
⎧
⎪
⎪ ut + aux + vx = 0,
⎨
⎪
⎪
⎩ vt + cux + avx = 0,
dove a ∈ R e c > 0 sono costanti fissate e si assegnano i dati iniziali
u(x, 0) = u0 (x),
v(x, 0) = v0 (x).
115
22 [⋆ ⋆ ⋆] Risolvere il problema ai valori iniziali per l’equazione di Schr¨odinger unidimensionale
con potenziale lineare:
⎧
⎪
⎪ iut (x, t) = −uxx (x, t) + α x u(x, t),
⎨
⎪
⎪
⎩ u(x, 0) = ϕ(x),
x ∈ R,
t > 0,
dove α `e una costante reale assegnata.
23 [⋆⋆] Risolvere il problema integro-differenziale
+∞
⎧
⎪
⎪
⎪
⎪ ut (x, t) = − ∫−∞ u(x − y, t)u(y, t)dy,
⎨
⎪
⎪
−∣x∣
⎪
⎪
⎩ u(x, 0) = e .
x ∈ R,
t > 0,
24 [⋆] Dimostrare che tutte le soluzioni dell’equazione differenziale
ut (x, t) = i∆u(x, t),
x ∈ RN , t > 0,
hanno norma L2 (rispetto a x) costante (rispetto a t).
25 [⋆⋆] Consideriamo il cambio di coordinate lineare in RN
x′ = Ax,
A ∈ GL(N ).
Trovare come sono legate le trasformate di Fourier nei due sistemi e utilizzare questo risultato per
dimostrare che il Laplaciano `e invariante per rotazioni.
Esercizi sul capitolo 4
26 [⋆] Calcolare
lim
→0
.
2 + x 2
27 [⋆⋆] Calcolare
lim
c→±∞
dove
nc = ∫
1 −(x2 +c∣x∣)
e
,
nc
+∞
−∞
e−(x
2
+c∣x∣)
dx.
28 [⋆] Sia g ∈ C 1 (R). Calcolare la derivata distribuzionale della funzione u(x) = sgn(x)g(x), dove
ricordiamo che la funzione “segno” `e cos`ı definita:
x
⎧
⎪
⎪
⎪ ∣x∣ , se x =/ 0,
sgn(x) = ⎨
⎪
⎪
⎪
⎩ 0, se x = 0,
116
APPENDICE B. ESERCIZI
29 [⋆⋆] Sia g ∈ C 1 (R) tale che g(0) = 0, g ′ (x) =/ 0, ∀ x ∈ R e lim∣x∣→∞ ∣g(x)∣ = +∞. Calcolare
lim+ √
σ→0
2
2
1
e−g (x)/2σ .
2πσ
30 [⋆] Siano θ1 e θ2 due numeri reali assegnati, e sia
⎧
⎪
⎪ θ1 , se x ≤ 0,
θ(x) = ⎨
⎪
⎪
⎩ θ2 , se x > 0,
Calcolare la derivata distribuzionale della funzione f (x) = sin(θ(x)).
31 [⋆] Sia g ∈ C 1 (R) tale che g(x0 ) = 0, g ′ (x) =/ 0, ∀ x ∈ R. Calcolare la derivata distribuzionale
di f (x) = H(g(x)) (dove H `e la funzione di Heaviside).
32 [⋆⋆] Trovare la soluzione generale dell’equazione differenziale
u′ (x) = α δ(x)u(x),
x ∈ R,
dove δ `e la “funzione” delta Dirac e α ∈ R `e un parametro assegnato.
33 [⋆⋆] Dare un significato all’espressione δ(x2 − 1) (nel senso di “composizione” della “funzione”
delta di Dirac con la funzione x2 − 1).
ˆ ϕ⟩.
34 [⋆] Sia H la funzione di Heaviside e ϕ ∈ S(R) una funzione test pari. Calcolare ⟨H,
35 [⋆] Calcolare la trasformata di Fourier della funzione
f (x) = e−x
2
/2
sin x,
36 [⋆⋆] Calcolare la trasformata di Fourier delle funzioni
f (x, y) = e−x
2
/2
cos y,
g(x, y) = x e−y .
2
37 [⋆⋆] Si consideri la distribuzione f su R2 cos`ı definita:
⟨f, ϕ⟩ ∶= ∫
+∞
−∞
ϕ(0, y) dy,
1. Dimostrare che f `e una distribuzione temperata;
2. dimostrare che `e singolare;
3. calcolarne il gradiente distribuzionale;
∀ ϕ ∈ S(R2 ).
117
4. calcolarne la trasformata di Fourier.
38 [⋆⋆] Fissato un versore n ∈ RN , si consideri la distribuzione f su RN cos`ı definita:
⟨f, ϕ⟩ ∶= ∫
+∞
−∞
ϕ(tn) dt,
∀ ϕ ∈ S(RN ).
Calcolare fˆ.
39 [⋆ ⋆ ⋆] Calcolare l’antitrasformata della funzione
f (k) =
1
,
1 + iα ⋅ k
k ∈ RN ,
dove α ∈ RN `e un vettore fissato, e utilizzare il risultato per risolvere l’equazione differenziale
α ⋅ ∇ u(x) + u(x) = g(x),
con g ∈ S(RN ) assegnata.
40 [⋆] Si interpreti la serie di Fourier (puntualmente non convergente)
2 inx
∑n e .
n∈Z
Esercizi sul capitolo 5
41 [⋆⋆] Risolvere il problema integro-differenziale
1
⎧
⎪
⎪
⎪ ut (x, t) = ∫ xy u(y, t)dy,
0
⎨
⎪
⎪ u(x, 0) = ϕ(x).
⎪
⎩
x ∈ [0, 1], t ∈ R,
42 [⋆⋆] Sia p(x) una densit`
a di probabilit`a su R. Risolvere il problema integro-differenziale
+∞
⎧
⎪
⎪
u(y, t) dy − u(x, t),
⎪ ut (x, t) = p(x) ∫
−∞
⎨
⎪
⎪
⎪
⎩ u(x, 0) = ϕ(x).
x ∈ R, t ∈ R,
⃗ ∈ R3 fissato. Risolvere
43 [⋆] Sia B
⎧
d
⎪
⃗ ∧ v⃗(t),
⎪
⎪ v⃗(t) = B
⎨ dt
⎪
⎪ v⃗(0) = v⃗ .
⎪
0
⎩
t ∈ R.
44 [⋆] Sia ν⃗ un versore fissato in RN e sia Π la proiezione ortogonale sul sottospazio generato da
ν⃗. Calcolare etΠ .
118
APPENDICE B. ESERCIZI
45 [⋆⋆] Trovare il semigruppo associato al sistema di equazioni
⎧
⎪
⎪ ut = −ivx ,
⎨
⎪
⎪
⎩ vt = iux ,
(con x ∈ R).
46 [⋆⋆] Trovare il semigruppo associato al sistema di equazioni
⎧
⎪
⎪ ut = −vxx ,
⎨
⎪
⎪
⎩ vt = uxx − u,
(con x ∈ R).
47 [⋆⋆] Trovare i semigruppi associati al problema della diffusione nella sbarretta con con
condizioni di Dirichlet
⎧
2
⎪
x ∈ (0, `), t > 0,
⎪ ut (x, t) = c uxx (x, t),
⎨
⎪
t ≥ 0,
⎪
⎩ u(0, t) = u(`, t) = 0,
e con condizioni di Neumann
⎧
2
⎪
⎪ ut (x, t) = c uxx (x, t),
⎨
⎪
⎪
⎩ ux (0, t) = ux (`, t) = 0,
x ∈ (0, `), t > 0,
t ≥ 0,
e utilizzarli per risolvere tali problemi in presenza di un termine di sorgente q(x, t) assegnato
(ovvero per l’equazione ut (x, t) = c2 uxx (x, t) + q(x, t)).
48 [⋆⋆] Risolvere
⎧
ut (x, t) = ∆u(x, t) − v(x, t),
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪ vt (x, t) = ∆u(x, t) + u(x, t),
⎨
⎪
u(x, 0) = u0 (x),
x ∈ RN ,
⎪
⎪
⎪
⎪
⎪
⎪
⎪
x ∈ RN ,
⎩ v(x, 0) = v0 (x),
dove u0 e v0 sono funzioni assegnate.
x ∈ RN , t > 0,
x ∈ RN , t > 0,
49 [⋆ ⋆ ⋆] Sia X = L1 (R) e consideriamo l’operatore lineare A ∶ D(A) ⊂ X → X cos`ı definito:
D(A) = {u ∈ X ∣ u′ ∈ X}
Au = u′ − αu,
∀ u ∈ D(A).
(con α > 0 fissato). Trovare l’insieme risolvente di A.
50 [⋆ ⋆ ⋆] Sia X = C0 ([0, +∞)) (lo spazio di Banach delle funzioni continue e limitate su [0, +∞)
con la norma del sup). Consideriamo l’operatore lineare A ∶ D(A) ⊂ X → X cos`ı definito:
D(A) = {u ∈ X ∣ u′ ∈ X e u(0) = 0}
Au = −u′ ,
∀ u ∈ D(A).
119
Trovare l’insieme risolvente di A. L’operatore −A (definito sullo stesso dominio D(A)) pu`o essere
generatore di un semigruppo su X?
51 [⋆ ⋆ ⋆] Sia X = C0 ((−∞, α)) (lo spazio di Banach delle funzioni continue e limitate su (−∞, α)
con la norma del sup). Consideriamo l’operatore lineare A ∶ D(A) ⊂ X → X cos`ı definito:
D(A) = {u ∈ X ∣ u′ ∈ X}
Au = −u′ ,
∀ u ∈ D(A).
Verificare la condizione spettrale di Hille-Yosida nei casi α ∈ R e α + ∞.
120
APPENDICE B. ESERCIZI
Bibliografia
- Testi di carattere generale sui metodi matematici [1] M. Reed, B. Simon, Methods of Modern Mathematical Physics (4 volumi) Academic Press,
1972-1978.
[2] G. Arfken, Mathematical methods for physicists, Academic press, 1985.
[3] R. Dautray, J. L. Lions, Mathematical analysis and numerical methods for science and
technology (6 volumi), Springer-Verlag, 1992.
[4] J. Mathews, R. L. Walker, Mathematical methods of physics, Benjamin, 1973.
[5] J. Ockendon, S. Howison, A. Lacey, A. Movchan, Applied Partial Differential Equations,
Oxford University Press, 1999.
[6] A. Tichonov, A. Samarskij, Equazioni della fisica matematica, MIR, 1981.
- Testi di riferimento di analisi [7] H. Brezis, Analisi funzionale Liguori, 1986.
[8] L. C. Evans, Partial differential equations, American Mathematical Society, 1999.
[9] E. Giusti, Analisi Matematica 2, Boringhieri, 1986.
[10] W. Rudin, Real and complex analysis, McGraw-Hill, 1987.
[11] W. Rudin, Functional analysis McGraw-Hill, 1991.
- Specifici sulle serie di Fourier [12] A. Kufner, J.Kadlek, Fourier series, Iliffe Books, 1971.
[13] A. Zygmund, Trigonometric series, Second edition, Cambridge University Press, 1968.
- Specifici sulle funzioni speciali [14] M. A. Al-Gwaiz, Sturm-Liouville Theory and its applications, Springer, 2008.
[15] N. Lebedev, Special functions and their applications, Prentice-Hall, 1965.
[16] A. Zettl, Sturm-Liouville Theory, “Mathematical Surveys and Monographs” Vol. 121, AMS,
2005.
- Specifici sulle trasformate di Fourier [17] R. Bracewell, The Fourier transform and its applications, McGraw-Hill, 1986.
121
122
BIBLIOGRAFIA
- Teoria delle distribuzioni [18] I. M. Gelfand, G. E. Shilov, Generalized functions (Vol. 1), Academic Press, 1964.
[19] L. Schwartz, Th´eorie des distributions, Hermann, 1966.
[20] R. Strichartz, A guide to distribution theory and Fourier transforms, CRC Press, 1994.
[21] A. Zemanian, Distribution theory and transform analysis, Dover, 1965.
- Teoria dei semigruppi [22] J. Banasiak, L. Arlotti, Perturbations of positive semigroups with applications, Springer
Verlag, 2006.
[23] A. Belleni-Morante, Applied semigroups and evolution equations, Clarendon Press, 1979.
[24] K. J. Engel, R. Nagel, One-parameter semigroups for linear evolution equations, Springer
Verlag, 2000.
[25] A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations,
Springer Verlag, 1983.
- Applicazioni [26] B. H. Bransden, C. J. Joachain, Introduction to quantum mechanics, Longman, 1989.
[27] J. S. Duderstadt, W. R. Martin, Transport Theory, Wiley-Interscience, 1979.
[28] J. D. Jackson, Elettrodinamica classica, Zanichelli, 1984.
- Letture complementari [29] V. I. Arnold, Lectures on partial differential equations, Springer. 2004 .
- Siti web interessanti [30] http://mathworld.wolfram.com/ (Wolfram Mathworld).
[31] http://turnbull.dcs.st-and.ac.uk/history/ (The MacTutor history of mathematics
archive).
[32] www.shef.ac.uk/chemistry/orbitron/ (The Orbitron: a gallery of atomic and molecular
orbitals).
[33] http://fisicaondemusica.unimore.it/ (Fisica, Onde, Musica:
animazioni per illustrare i fenomeni ondulatori)
immagini, suoni e
Queste dispense sono disponibili on-line all’indirizzo
www.math.unifi.it/users/barletti/
Tutti i diritti riservati.
Sono vietate la riproduzione e la diffusione, anche parziali,
senza l’esplicita autorizzazione da parte dell’autore.
© Copyright 2026 Paperzz