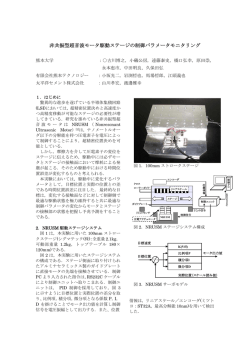
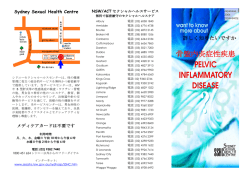
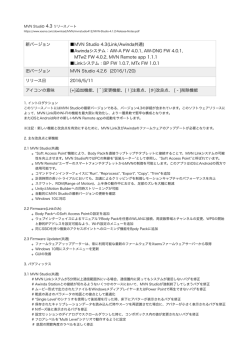
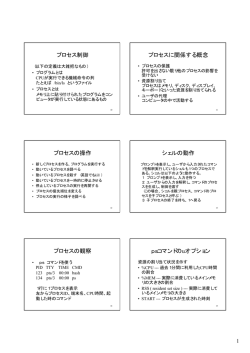
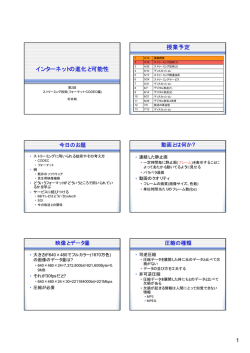
日本工業出版㈱ web 講座 ゼロから学ぶ PID 制御(ディジタルコース) 第5回 ディジタル PID 制御:差分法によるディジタル化 1.差分法によるディジタル変換 ∆MVn = MVn − MVn −1 連続(アナログ)系からディジタル系に変換する方法 ∆t = K P (e n − e n −1 ) + e n TI T + D (e n − 2 e n −1 + e n −2 ) ∆t の第2弾として、微分方程式から差分近似をして変換す る方法を紹介する。(5.1)式に示す時間領域で表現され たアナログ PID 制御基本式を差分法を用いてディジタ ル PID アルゴリズムに変換する例について説明する。 1 de MV = K P e + ∫ e dt + TD T dt I MVn = MVn −1 + ∆MVn …(5.1) …(5.6) …(5.7) この(5.6)式と(5.7)式の組合せが理想偏差 PID 制 MV:PID 制御出力、e:偏差(目標値−実際値) 御の速度形ディジタル演算式である。第 5.1 図にステッ KP:比例ゲイン、TI:積分時間、TD:微分時間 プ偏差が発生した場合の理想偏差ディジタル PID 制御 (5.1)式において、積分は(5.2)式のように、また 出力の波形を示す。 微分は(5.3)式のように近似する。 …(5.2) 偏 差 e e0 …(5.3) 微分項出力 ここで(5.2)式および(5.3)式を(5.1)式に代入 して整理すると(5.4)式を得る。 ∆t n T MVn = K P e n + ∑ e i + D (e n − e n −1 ) T ∆ t I i =1 t 操 作 出 力 MV …(5.4) 理想偏差ディジタルPID制御出力 �t 積分項出力 この(5.4)式は、いわゆる「理想 PID 制御の位置形ディ ジタル演算式」である。 比例項出力=KP×e0 時間t 2.速度形ディジタル演算式 第 5.1 図 速度形演算式を求めるためには操作信号 MVn を「今 ステップ偏差に対する理想偏差ディジタル PID 制御出力 回 値 MVn = 前 回 値 MVn − 1 + 変 化 分 ∆MVn」 と い う 形 にしなければならない。そこで、(5.4)式から前回値 3.不完全微分のディジタル演算式 MVn − 1 を求めると(5.5)式となる。 ∆t n −1 MVn −1 = K P e n −1 + ∑ e i TI i =1 T + D (e n −1 − e n −2 ) ∆t 不完全微分をラプラス演算子 s を用いた(5.8)式で 表現されたアナログ演算式を出発点として、ディジタル 演算式に変換する過程を手順を追って説明する。 … (5.5) E(s) 変化分 ∆MVn は(5.4)式から(5.5)式を差し引いて 得られ、(5.6)式となる。 偏差 TD・s 1+�TD・s 出力 Y(s) …(5.8) 【手順 1】まず不完全微分をラプラス演算子 s を用いて、 (5.9)式に示す伝達関数の形で表す。 – 12 – 日本工業出版㈱ web 講座 Y(s) TD ⋅ s = E(s) 1 + ηTD ⋅ s … (5.9) 偏 差 e e0 t 微分項 【手順 2】次にラプラス方程式を微分方程式に書き換え 実用偏差ディジタルPID制御出力 る。 (5.9)式の分母をはらって変形して、 (5.10)式とする。 Y(s) + ηTD ⋅ s ⋅ Y(s) = TD ⋅ s ⋅ E(s) … (5.10) 操 作 出 力 MV �t 積分項出力 次に(5.11)式を微分方程式に変換すると、(5.11) となる。 比例項=KP×e0 dy de y + ηTD = TD dt dt 時間t …(5.11) 第 5.2 図 ステップ偏差に対する実用偏差ディジタル PID 制御出力 【手順 3】近似して差分を用いた式に変換する。 (5.12)式のように近似して、これを(5.11)式に代 入し整理して(5.13)式を得る。 的広がりを持っており、微分面積が大きくなって操作端 … (5.12) yn = ηTD TD y n −1 + (e n − e n−1 ) ∆t + ηTD ∆t + ηTD にエネルギーを与えることができ、微分が有効に働くよ うになっていることがわかる。 …(5.13) 5.実用測定値微分先行形ディジタル PID この(5.13)式は制御周期ごとに出力の大きさを直 測定値微分先行形は目標値 SV 変化に対して、微分動 接計算するもので、不完全微分の位置形ディジタル演算 作が効かないようにして、目標値 SV 変化に伴うキック 式である。 をなくし、プロセスに与えるショックを抑制したもので ある。これに対応するためには、微分演算部分のみに対 【手順 4】さらに(5.13)式に代数操作をして速度形ディ して SVn = SVn − 1 = SVn − 2 として、他の部分は実用偏差 ジタル演算式に変換し、(5.14)式を得る。 ηTD y n = y n −1 + ∆y n −1 ∆t + ηTD + TD (e n − 2e n−1 + e n−2 ) ∆t + ηTD PID の(5.15)式と同じ演算をすればよい。具体的には、 (5.15)式の微分演算の中の(en − 2en − 1 + en − 2)の部分 のみを(2PVn − 1 − PVn − PVn − 2)に置き換えればよい。 …(5.14) 6.実用測定値比例微分先行形ディジタル PID これは前項の測定値微分先行形 PID に対して、さら に目標値 SV 変化に伴う比例キックをなくしたものであ 4.実用偏差ディジタル PID る。これに対応するためには、前期 5 項の処理にさら 以上の結果をまとめて、不完全微分を用いた実用偏差 に比例演算に対しても SVn = SVn − 1 として、 (5.15)式 PID 制御の速度形ディジタル演算式は(5.15)式になる。 の 比 例 演 算 の 中 の(en − en − 1) 部 分 を(PVn − 1 − PVn) に置き換えることを追加すればよい。 …(5.15) <参考文献> ⑴ 広井:「プロセス制御を解剖する:第 25 回 ディジタル PID: 差分法によるディジタル変換」,『計装』Vol.43, No.8(2000.7) ⑵ 第 5.2 図にステップ偏差が発生した場合の実用偏差 広井,宮田:『シミュレーションで学ぶ自動制御技術入門』, CQ 出版 ㈱ 2004.10) ディジタル PID 制御出力の波形を示す。第 5.1 図の理 想偏差ディジタル PID 制御出力の波形と比べると、P 動 作出力と I 動作出力は同じであるが、D 動作出力が時間 – 13 –
© Copyright 2026 Paperzz