平成24年度
神戸大学大学院 工学研究科 博士課程前期課程
機械工学専攻 入学試験問題
科目名:機械力学・制御 [1/3]
(間1と間2に対する解答は別の解答用紙に行うこと)
[間1]
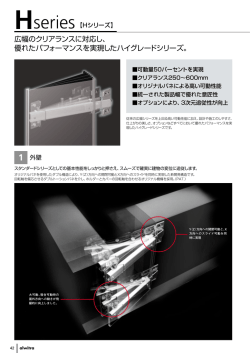
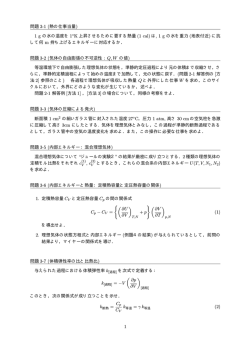
図1- 1のように質量の無い円形断面の回転軸の中央に,質量Mの円板が取り付け
られた横置きの回転機械の振動(曲げ振動)について以下の問に答えよ・ただし,回転
軸は左右両端で支持された両端単純支持はりとみなし,質量Mの振動方向はX方乱
重力加速度gの作用方向は図示の方向とする・
(1)見かけのばね定数kを求めよ.
(2)回転部分の不つりあい加振力の上下方向(X方向)成分がmraPcosa,tであると`
き,回転機械の上下方向(X方向)の振動に対する運動方程式を示せ.
(3)回転機械の上下方向(X方向)の不減衰固有振動数fn(Hz)を求めよ.
(4)回転機械の上下方向(X方向)の減衰比{を求めよ・
(5)回転機械の上下方向(Ⅹ方向)の減衰比を実測したい/実測方法を説明せよ.
(6)回転機械の上下方向(X方向)の不減衰固有振動数を上記(3)で求めた値の2
倍となるように回転軸の直径を変更したい.回転軸の直径を何倍にすればよいか
計算せよ.
(7)回転部分の不つりあい加振力mraPcosa)tにより,使用回転数で共振して過大振
動が発生した.この過大振動を低減するための具体的対策案を複数示せ.
不つり合い
lJL'2X↑着帽量…掛gl
lLJ---
千
辻菠耳示ツ
餃#ィ
回転軸:円形断面
警5,7*=芸∴剛若妻係数C
エ
図1-1 横置きの回転機械
│ィx
2
平成24年度
神戸大学大学院工学研究科博士課程前期課程
機械工学専攻 入学試験問題 、
科目名:機械力学・制御(2/3)
(問1と問2に対する解答は別の解答用紙に行うこと)
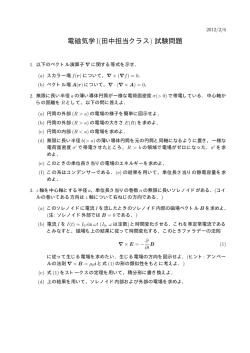
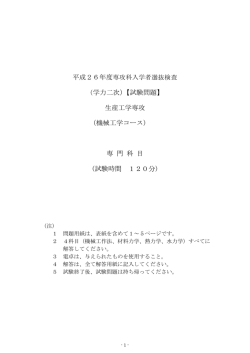
[問21]図2-1はひずみゲージ式加速度計のしくみを表した図であり,オイルで満たさ
れたセンサ内部でおもりが片持ち梁に支えられた構造となっている.センサ全体がある加
速度を受けるとおもりに慣性力が加わりそれによって片持ち梁がたわみ,そのたわみ量を
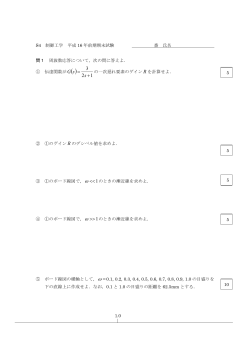
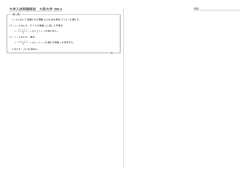
ひずみゲージで検出してセンサ出力とする.図2-2は,このひずみゲージ式加速度計をモ
デル化したものであり,お.もりは質量mの質点片持ち梁はばね定数kのバネ,オイル
は粘性係数dのダンパとしてモデル化されている.このひずみゲージ式加速度計に関して
以下の問いに答えよ.
(1)図2-2においそ,加速度計本体に加わる加速度をαとし上向きを正とする.加速度
計内部のおもりの釣り合い位置からの変位をyとする(下向きを正) ・簡単化のため,ま
ずα- oとして,加速度計内部のおもりの運動方程式を導け.ただし重力ははたらかない
ものとする.
(2)次に,この加速度計に図2-2のように本来の加速度αが加わった場合の運動方程式
を導き(それぞれの加速度の向きに注意) ,それからαを入力とLyを出力とする伝達関
数G(S)を求めよ・
1
(3) m-3っd-15,k-12とすると, a(S)は両市碕となる・このときこの系のイ
ンパルス応答g(i)を求めよ・ただしインパルスを加える前の系のすべての初期値g(0-),
a/(0-) (ただしg/(i)はg(i)の時間微分)は0とする・
(4)このセンサ(パラメータは(3)で与えたもの)を鉛直下向きにはたらく重力(重
力加速度の大きさは10と近似する)のある環境下で, sin2舌なる周期的変位をセンサに強
制的に与えたときの,センサ出力の定常応答を求めたい. Sin2舌の強制変位により,セン
サには-4sin2iの加速度が加わり,重力加速度を考慮するとα(i) - -4sin2士□ 10の加
速度が加えられた時の定常応答を求めればよい・ただし口には符号(+か-)が入る・
この符号がどちらになるかを示したのちに,実際に定常応答を求めよ.
([問2-1]は次ページに続く)
ひずみゲージ
図2-1:ひずみゲージ式加速度計
図2-2:ひずみゲージ式加速度計のモデル
平成24年度
神戸大学大学院工学研究科博士課程前期課程
機械工学専攻 入学試験問題
科目名:機械力学・制御(3/3)
(問1と問字に対する解答は別の解答用紙に行うこと)
([問2-1]の続き)
(5) a(a)は2次系というが, 2次系の特性は減衰係数ぐと自然角周波数unであらわ
される. (3)のパラメータとしたときのこの系の亡とLJnを求め,加速度計の望ましい特
性,すなわち高い速応性(広いバンド幅)と適度な減衰特性(過渡特性で過度にオーバー
シュートしない)を持つようにするには,パラメータm, a, kをどのように設定すればよ
いのかを考察せよ.
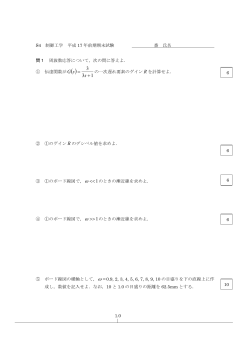
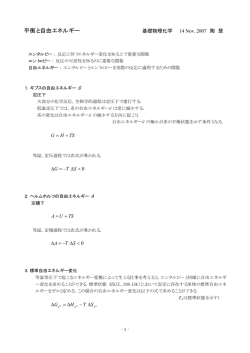
[問2-2]図2-3に示すようなrを入九yを出力とするフィードバック系について,以
下の問いに答えよ.
(1 )閉ループ伝達関数を求めよ.
(2)このフィードバック系が安定であるための実数茸の範囲をラウスの安定判別法に
よって求めよ.
(3)図2-3に示したように,この系には外乱dが混入し得るとする.外乱dから出力yま
での伝達関数を求めよ.また,ステップ外乱d(i) - 1に対する出力y(i)の定常値を求め
て,フィードバック系には外乱抑制効果があることを説明せよ.
d
図2-3:フィードバック制御系
© Copyright 2026 Paperzz