T.C.
GAZİOSMANPAŞA ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
FİZİK ANA BİLİMDALI
Mn/n-GaAs SCHOTTKY DİYOTUNUN
HİDROSTATİK BASINÇ ALTINDA
ELEKTRİKSEL KARAKTERİZASYONU
HAZIRLAYAN: SADIK ÖNAL
DANIŞMAN: Doç. Dr. GÜVEN ÇANKAYA
YÜKSEK LİSANS TEZİ
TOKAT
2007
Mn/n-GaAs SCHOTTKY DİYOTUNUN
HİDROSTATİK BASINÇ ALTINDA
ELEKTRİKSEL KARAKTERİZASYONU
SADIK ÖNAL
YÜKSEK LİSANS TEZİ
FİZİK ANABİLİM DALI
TOKAT
2007
i
ÖZET
Mn/n-GaAs SCHOTTKY DİYOTUNUN
HİDROSTATİK BASINÇ ALTINDA
ELEKTRİKSEL KARAKTERİZASYONU
SADIK ÖNAL
Gaziosmanpaşa Üniversitesi
Fen Bilimleri Enstitüsü Fizik Anabilim Dalı
Yüksek Lisans Tezi
2007, 108 Sayfa
Danışman
:
Doç. Dr. Güven ÇANKAYA
Jüri
:
Doç. Dr. Güven ÇANKAYA
Jüri
:
Yrd. Doç. Dr. Salih SAYGI
Jüri
:
Yrd. Doç. Mahmut HEKİM
Yarıiletken diyotların I − V karakteristikleri yardımıyla elde edilen parametreleri,
elektronik tasarımlarında önemli yer tutmaktadır. Çığ gibi büyüyen elektronik sanayisinde,
değişik yöntemlerle malzeme parametrelerinin her geçen gün iyileştirilmesi ve
çeşitliliğinin artması, malzemelerin karakterizasyonlarından yapılan parametre
hesaplamalarında yeni metodlar bulunmasının yolunu açmıştır. Bu hesaplamaların hepsi
Termoiyonik Emisyon teorisine dayandırılmaktadır. Schottky diyot parametrelerinin
hesaplanmasında TE teorisini temel alarak literatürde çokca kullanılan Missous yöntemi,
Norde Fonksiyonu ve Cheung fonksiyonları yardımıyla diyotun elektriksel parametrelerini
hesaplaplayabiliriz. Ayrıca deneysel veriler yardımıyla deney aralığını ANFIS ile
tanımlayıp bu deney aralığında deneysel verileri alınmış yada alınmamış basınç değerleri
için karakterizasyonun tüm değerleri için tahmin ettirebiliriz. Teorik olarak verilen
denklemde basınç parametresi bulunmamasına rağmen bu çalışma ile hidrostatik basıncın
etkisini kısmende olsa hesaplamaya dahil edilebileceğini göstermeye çalıştık.
Anahtar Kelimeler: Metal-Yarıiletken Kontaklar, Elektriksel Özellikler, Hidrostatik
basınç, ANFIS
ii
ABSTRACT
ELECTRICAL CHARACTERIZATION
OF Mn/n-GaAs SCHOTTKY DIODE
UNDER HYDROSTATIC PRESSURE
SADIK ÖNAL
Gaziosmanpaşa University
Graduate School of Natural and Applied Science
Department of Physics
Master Thesis
2007, 108 Pages
Supervisor
:
Assoc. Prof. Dr. Güven ÇANKAYA
Jury
:
Assoc. Prof. Dr. Güven ÇANKAYA
Jury
:
Asst. Prof. Dr. Salih SAYGI
Jury
:
Asst. Prof. Dr. Mahmut HEKİM
Semiconductor diode-parameters which are obtained by I − V characteristics are very
important in electronic design. In rapidly developing electronic industry, the improvements
of material parameters by using various methods, hence the increasing of diversity provide
to find new methods in parameter solutions, which is calculated from material
characterizations. All these calculations is based on Thermoionic Emission theory. We can
calculate electrical parameters of diode with the help of Missous method, Norde Function
and Cheung Functions which are greatly used in literature and based on TE theory.
Additionally, working range of data can be defined by ANFIS by inserting experimental
data and in this range we can find all values of characterization predicted for pressure
values which having or no having experimental values. Theoretical equation is not consist
of pressure parameters, although this study have showed effect of hydrostatic pressure, can
be included partially in calculations.
Keywords: Metal-Semiconductor Contacs, Electrical Properties, Hydrostatic pressure,
ANFIS
iii
TEŞEKKKÜR
Yüksek Lisans eğitimim ve bu tezi hazırlamam esnasında yorulmadan, bıkmadan
yardımlarını esirgemeyen, bilgi ve deneyimleriyle her türlü desteği sağlayan, danışman
hocam Sayın Doç. Dr. Güven ÇANKAYA’ya en içten şükranlarımı arz ederim.
Çalışmalarım esnasında sonsuz yardımlaştığım, her türlü desteğini aldığım kötü
gün dostu değerli hocam Sayın Yrd. Doç. Dr. Mahmut HEKİM’e en içten şükranlarımı arz
ederim.
Çalışmalarım
sırasında
bilgi
ve
birikimlerinden
faydalandığım
değerli
meslektaşım Elektronik Yüksek Mühendisi Ali Durmuş’a teşekkür ederim.
Çalışmalarımın bütün aşamaları boyunca en büyük maddi ve manevi desteğini
aldığım değerli aileme teşekkürü bir borç bilirim.
Sadık ÖNAL
iv
İÇİNDEKİLER
ÖZET ..................................................................................................................................... i
ABSTRACT.......................................................................................................................... ii
TEŞEKKÜR......................................................................................................................... iii
İÇİNDEKİLER .................................................................................................................... iv
ŞEKİLLER LİSTESİ .......................................................................................................... vii
TABLOLAR LİSTESİ......................................................................................................... x
SİMGELER VE KISALTMALAR LİSTESİ ...................................................................... xi
1.GİRİŞ ................................................................................................................................ 1
2.
SCHOTTKY DİYOTLAR HAKKINDA GENEL BİLGİLER
4
2.1.
Schottky Diyotların Gelişim Süreci.......................................................................... 4
2.2.
Metal-Yarıiletken Kontaklar................................................................................... 16
2.2.1
n-Tipi Yarıiletken-Metal Doğrultucu (Schottky) Kontak Oluşumu ....................... 16
2.3.
Metal n-Tipi Yarıiletken Omik Kontaklar.............................................................. 20
2.4.
Metal (Omik) n- Tipi Yarıiletken–Metal (Schottky) Yapısı .................................. 22
2.5.
Schottky Diyotlarında Termoiyonik Emisyonla Akım İletimi ............................... 23
2.6.
Missous Yöntemi ile Schottky Diyot Parametrelerinin Belirlenmesi..................... 24
2.7.
Norde Fonksiyonları ile Schottky Diyot Parametrelerinin Belirlenmesi................ 25
2.8.
Cheung Fonksiyonları ile Schottky Diyot Parametrelerinin Belirlenmesi ............. 29
3.
YAPAY SİNİR AĞLARI
3.1.
Yapay Sinir Ağlarının Genel Özellikleri ................................................................ 34
3.2.
Transfer Fonksiyonları............................................................................................ 36
3.3.
YSA’ların Özellikleri.............................................................................................. 38
3.3.1
Doğrusal Olmama ................................................................................................... 38
3.3.2
Öğrenme.................................................................................................................. 38
31
v
3.3.3
Genelleme Yapabilme............................................................................................. 38
3.3.4
Uyarlanabilirlik....................................................................................................... 39
3.3.5
Donanım Olarak Gerçekleştirilebilme ................................................................... 39
3.3.6
Hataya Karşı Duyarlılık .......................................................................................... 39
3.3.7
Veri İşleme.............................................................................................................. 40
3.4.
YSA’ların Sınıflandırılması ................................................................................... 40
3.4.1. YSA’ların Ağ Yapılarına Göre Sınıflandırılması ................................................... 40
3.4.1.1 İleri Beslemeli Ağ Yapısı ...................................................................................... 40
3.4.1.2 Geri Beslemeli Ağ Yapısı ...................................................................................... 41
3.4.2. Yapay Sinir Ağı Yapıları ....................................................................................... 42
3.4.2.1 Çok Katmanlı Perseptron YSA Yapısı .................................................................. 42
3.4.3. YSA’ların Öğrenme Algoritmalarına Göre Sınıflandırılması ............................... 43
3.4.3.1 Dereceli Azaltılmış Geri Yayılım (Back Propagation Gradient Descent)............. 44
3.5.
ANFIS Ağında Kullanılan Hibrid Öğrenme Algoritması...................................... 45
3.6.
Sistem Modellemede Yapay Sinir Ağlarının Kullanımı........................................ 47
4.
BULANIK SİNİR AĞI
4.1.
Bulanık Mantık ...................................................................................................... 49
4.1.1
Bulanık Mantık Gelişim Süreci ............................................................................. 49
4.1.2
Klasik ve Bulanık Mantık Arasındaki Fark ........................................................... 50
4.1.3
Bulanık Mantık Uygulama Alanları ...................................................................... 51
4.2.
Bulanık Küme Teorisi............................................................................................ 51
4.2.1
Klasik ve Bulanık Kümeler.................................................................................... 54
4.2.2
Üyelik Fonksiyonu................................................................................................. 55
49
4.2.3. Bulanık Kümelerde Temel İşlemler....................................................................... 57
4.2.3.1 Kapsama................................................................................................................. 57
4.2.3.2 Denklik................................................................................................................... 58
4.2.3.3 Kesişim .................................................................................................................. 58
4.2.3.4 Birleşim.................................................................................................................. 58
4.2.3.5 Tümleyen ............................................................................................................... 59
4.2.3.6 Cebirsel Toplam..................................................................................................... 59
vi
4.2.3.7 Cebirsel Çarpım ..................................................................................................... 59
4.2.3.8 Fark ........................................................................................................................ 60
4.3.
Bulanık Sistemler için Bulanık Kurallar................................................................ 60
4.4.
Bulanık Çıkarım İşlemi.......................................................................................... 62
4.4.1. Sugeno Bulanık Çıkarım Metodu .......................................................................... 63
4.4.1.1 Sugeno Tipi Modelin Avantajları .......................................................................... 65
4.5.
Bulanık Sistem Geliştirme Aşamaları.................................................................... 65
4.6.
Bulanık Sinir Ağı (Neuro-Fuzzy) .......................................................................... 66
4.7.
Bulanık Sinir Ağı ile Sistem Modelleme............................................................... 69
5.
METARYAL VE METOD
5.1.
Numune Hazırlanması ........................................................................................... 71
5.2.
Akım – Gerilim ( I − V ) Ölçümleri ve Basıncın Diyot Parametrelerine Etkisi..... 71
5.3.
Missous Yöntemi Kullanılarak Diyot Parametrelerinin Belirlenmesi................... 77
5.4.
Norde Fonksiyonu Kullanılarak Diyot Parametrelerinin Belirlenmesi ................. 77
5.5.
Cheung Fonksiyonlarını Kullanılarak Diyot Parametrelerinin Belirlenmesi ........ 80
5.6.
ANFIS Kullanılarak Diyot Parametrelerinin Belirlenmesi.................................... 83
6.
SONUÇLAR VE TARTIŞMA............................................................................. 94
71
KAYNAKLAR .................................................................................................... 102
ÖZGEÇMİŞ
vii
ŞEKİLLER LİSTESİ
Sayfa
Şekil
2.1.
Metal/n-tipi yarıiletken doğrultucu (Schottky) kontak
18
2.2.
Düz ve ters beslem altındaki Metal/n-tipi yarıiletken doğrultucu kontak
19
2.3.
Metal/n-tipi yarıiletken omik kontak
21
2.4.
Düz ve ters beslem altındaki Metal/n-tipi yarıiletken omik kontak
21
2.5.
Termal dengede n-tipi Schottky diyodunun enerji band diyagramı
22
3.1.
Biyolojik nöron
32
3.2.
Yapay nöron
36
3.3.
YSA’larda en çok kullanılmakta olan transfer fonksiyonları
37
3.4.
İleri beslemeli YSA yapısı
41
3.5.
Geri beslemeli YSA yapısı
42
3.6.
Genel bir ÇKP Yapısı
43
4.1.
Klasik ve Bulanık Mantık Arasındaki Farkı
50
4.2.
A Kümesinin Üyelik Fonksiyonu
55
4.3.
Çeşitli Üyelik Fonksiyonu Biçimleri
56
4.4.
Bulanık Çıkarım Diyagramı
63
viii
4.5.
Sugeno Bulanık Çıkarım Metodu
65
4.6.
Basit Bir ANFIS Yapısı
68
5.1.
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz
beslem I-V grafiği ve tez yazarı tarafından yapılan düz beslem fit eğrileri
74
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz
beslem I-V grafiği ve Gözlemci tarafından yapılan düz beslem fit eğrileri
75
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz
beslem I-V grafikleri ile ters ve düz beslem fitleri
76
Mıssous yöntemi kullanılarak Mn/n- tipi GaAs Schottky diyotunun
uygulanan basınç ile ters ve düz beslem I-V grafiği
78
Norde Fonfsiyonları kullanılarak Mn/n- tipi GaAs Schottky diyotunun
uygulanan basınca göre F (V ) − V grafiği
79
Tez yazarı tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan
basınca göre dV d (ln I ) − I grafiği
81
Gözlemci tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan
basınca göre dV d (ln I ) − I grafiği
81
Tez yazarı tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan
basınca göre H ( I ) − I grafiği
82
Gözlemci tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan
basınca göre H ( I ) − I grafiği
82
0.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
84
1.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n- tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
85
3.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
86
5.2.
5.3.
5.4.
5.5.
5.6.
5.7.
5.8.
5.9.
5.10.
5.11.
5.12.
ix
5.13.
5.14.
5.15.
5.16.
5.17.
5.18.
5.19.
6.1.
5.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
87
7.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
88
ANFIS kullanılarak 0.00 kbar ve 1.00 kbar basınç değerleri arasında elde
edilen 0.50 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun
ters ve düz beslem I-V grafiği
89
ANFIS kullanılarak 1.00 kbar ve 3.00 kbar basınç değerleri arasında
elde edilen 1.50 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun
ters ve düz beslem I-V grafiği
90
ANFIS kullanılarak 1.00 kbar ve 3.00 kbar basınç değerleri arasında
elde edilen 2.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun
ters ve düz beslem I-V grafiği
91
ANFIS kullanılarak 3.00 kbar ve 5.00 kbar basınç değerleri arasında
elde edilen 4.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun
ters ve düz beslem I-V grafiği
92
ANFIS kullanılarak 5.00 kbar ve 7.00 kbar basınç değerleri arasında
elde edilen 6.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun
ters ve düz beslem I-V grafiği
93
Basınç ile Mn/n-tipi GaAs Schottky diyotunun Engel Yüksekliğinin
ve GaAs’ın Yasak Enerji Aralığının Değişim grafiği
99
x
TABLOLAR LİSTESİ
Tablo
Sayfa
3.1.
Biyolojik sinir sistemi ile YSA’ların karşılaştırılması
33
3.2.
Bazı transfer fonksiyonlarının matematik ifadeleri
37
4.1.
Bulanık Mantık ve YSA Açısından Sistem Modelleme Adımları
69
6.1.
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen idealite faktörü değerleri
100
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen engel yüksekliği değerleri
100
Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen seri direnç değerleri
101
6.2.
6.3.
xi
SİMGELER VE KISALTMALAR LİSTESİ
f (E )
Fermi dağılım fonksiyonu
EF
Fermi enerji
E vac
Vakum seviyesi
Es
Elektronunun iyonizasyon enerjisi
φs
Yarıiletkenin iş fonksiyonu
φm
Metalin iş fonksiyonu
χs
Yarıiletkenin elektron ilgisi
VD
Difüzyon potansiyeli
φb
Diyotun engel yüksekliği
V
Uygulanan potansiyel
k
Boltzman sabiti
I0
Doyma akımı
T
Mutlak sıcaklık
Evbm
Valans bandının maksimumu
EV
Valans bandı enerjisi
Ec
İletim bandı enerjisi
E fm
Metalin Fermi enerjisi,
E fs
Yarıiletkenin Fermi enerjisi
I
Net akım
J0
Doyma akım yoğunluğu
J
Net akım yoğunluğu
A∗
Richardson sabiti
n
İdealite faktörü
φb
Engel yüksekliği
Rs
Seri direnç
xii
F (V , γ )
Norde fonksiyonu
A
Diyotun etkin alanı
γ
İdealite faktöründen büyük keyfi bir sabit
V0
Diyot bölgesinde düşen voltaj
H (I )
İkinci cheung fonksiyonu
pi
i’inci giriş
wij
j’inci elemana bağlantı ağırlığı
η
Öğrenme katsayısı
δj
Ara veya çıkış katmanındaki herhangi bir j nöronuna ait faktör
E
Ağın çıkışındaki hata degeri
µ A ( x)
A kümesi elemanları üyelik dereceleri
S/N
Sinyal/Gürültü oranı
TTL
Transistör-Transistör Lojik
I2L
Entegre edilmiş enjeksiyon lojik
YSA
Yapay Sinir Ağları
I −V
Akım-Gerilim
C −V
Kapasitans-Gerilim
SEY
Schottky Engel Yüksekliği
FSM
Fermi Seviyesi Mıhlanması
SED
Schottky Engel Diyot
FET
Field Effect Transistör
MESFET
Metal Semiconductor FET
JFET
Junction FET
IR
InfraRed
TE
Termoiyonik Emisyon
ÇKP
Çok Katmanlı Perseptronlar
LVQ
Learning Vector Quantization
VLSI
Very Large Scale Integration
RTYSA
Radyal Tabanlı YSA
xiii
BPGD
Back Propagation Gradient Descent
FIS
Fuzzy Inference System
ANFIS
Adaptive Neuro Fuzzy Inference System
LPE
Lıquid-Phase Epitaxy
1
1.GİRİŞ
20. yüzyılda aktif devre elemanları olarak adlandırılan yarıiletken malzemeler
üzerine yapılan araştırmalar hız kazanmış ve elektronik sanayindeki yeri gün geçtikçe de
artmıştır. Hemen hemen her elektronik cihaz da kullanılan bu materyallerin değişen
fiziksel ortam ve şartlar altındaki elektriksel davranışlarının önceden bilinmesi, amaçlara
uygun olarak bu elektriksel davranışların modifiye edilmesi büyük önem arz etmektedir.
Nokta kontak diyotların gelişmiş hali Schottky kontaklardır. Schottky kontakların
gelişmiş olmasının sebebi, daha düşük seri direnç, daha düşük Sinyal/Gürültü (S/N)
oranına ve yüksek güç kapasitesine sahip olmalarıdır. Schottky engeli, bu yapılara göre
daha büyük mekaniksel güvenliğe sahip olup seri üretimi de daha kolaydır. Günümüzde,
Schottky doğrultucular elektronik sistemlerin tasarımına uygundur, özellikle yüksek
frekansların olduğu, çoğunluk taşıyıcılarının akım iletiminin baskın olduğu cihazlarda hızlı
anahtarlama modu (fast switching mode) istenen durumlarda kullanılırlar.
Schottky diyotlarda elektriksel iletkenlik çoğunluk taşıyıcıları ile sağlandığından,
rekombinasyon olayı gerçekleşmez ve buna bağlı olarak akımda bir azalma meydana
gelmez, verim daha yüksek olur. Böylelikle yüksek frekanslarda ve düşük düz beslemede
çalışabilmektedirler. Schottky engelinde anahtarlama hızı; enjekte edilen elektronların
termal hızları ile kontrol edilirken, p-n eklemde enjekte edilen azınlık taşıyıcıların yeniden
birleşmesiyle kontrol edilir ki Schottky engeli çok daha yüksek frekans uygulamalarında
(100 GHz’e kadar, sinyal karıştırıcı ve dedektörlerde) kullanılabilir. Anahtarlama hızının
yüksek olması devre elemanının tepki verme süresi ve yayılma gecikmesi süresini kısaltır,
bu azalma uygulamada anahtarlama modu (switching mode) olarak karşımıza çıkar.
Schottky yapıları üzerinde yapılan teorik çalışmalar teknolojik çalışmalardan daha
sonra olmuştur. Günümüzde hala teorik çalışmalar, farklı malzemeler için değişik fiziksel
koşullar altında araştırılmaktadır.
2
Schottky diyotların ticari anlamdaki en önemli uygulamaları birleştirici olarak
entegre unipolar devrelerdedir. Diğer yandan mikrodalga diyot ve mikrodalga
transistörlerde kapı olarak kullanılmaları da sayılabilir. Pratikte çoğu uygulamalar
çoğunluk taşıyıcıların kendi yapılarından kaynaklanan iletimi yüksek hızda sağlamalarının
avantajı üzerine yoğunlaşmıştır. Metal-yarıiletken doğrultucular, p-n eklem elemanlardaki
azınlık taşıyıcılarının birikmesi ile bağlantılı olarak hız limitlerinden kısmen muaftır.
Schottky diyotların, p-n eklem elemanlara göre üstünlükleri; 1 ns altına kadar düşebilen
anahtarlama hızları, küçük düz beslemde voltaj düşüşü, yüksek ters empedans (çok küçük
sızıntı akımları), sıkışma boyutu (mikroölçekte yapılabilmesi), kolaylıkla üretilebilir
olması ve düşük sıcaklıkta imalatı sayılabilir.
Sistemlerin matematik modellerinin önemi bugün tüm alanlarda hızla artmaktadır.
Özellikle üretim alanında sistemin verimli, hızlı ve kaliteli olabilmesi için bu sistemin
modellenmesi gerekmektedir. Böylece sistemin ileri ki dinamik davranışı tahmin edilebilir
ve üretimin istenilen seviyede olması sağlanır. Sistem modellemede amaç bilinmeyen bir
sistemin transfer fonksiyonu adı verilen geçiş eğrisinin belirlenmesidir (Perrot and Cohen,
1996).
Bulanık mantık, üyelik derecelerini temel almış, ikili mantığın aksine çok sayıda
değer alabilen matematiğe ait bir disiplindir. Bulanık mantık, yanlış veya doğru olma
durumlarından çok, doğru olma durumunun olasılıklarına dayanır. Ayrıca, bulanık mantık
uygulaması, matematik modele ihtiyaç duymamaktadır (Ross, 1995).
Bulanık mantığın belirsiz bilgileri işleme ve yapay sinir ağının öğrenme
yeteneğinden yararlanılarak, sistem modelleme gerçekleştirilmiştir. Aynı zamanda bulanık
mantık ve yapay sinir ağının birleştirilmesi, birbirlerinin dezavantajlarını da örtmektedir.
Bulanık sinir ağı değişik birçok sistemin modellenmesine uygulanmıştır (Cheng and Jion,
2004).
Hidrostatik basınç altında süperlatis yapıların karakteristikleri Gassot et al., 1996;
Robert et al., 1999 tarafından incelenmiştir. Tünel diyot parametrelerinin değerlendirilmesi
için benzer çalışmalar Dizhur et al., 2001 tarafından yapılmıştır. Schottky kontaklarda seri
3
direnç ve ara yüzey hal yoğunluğunun basınç ile değişimi Çankaya et al., 1999; Çankaya
and Uçar 2002a tarafından incelenmiştir. Engel yüksekliğinin basınç ile değişimi ve
sonuçların değerlendirilmesi, yarıiletkenin iyonik doğasını ve elektronik yapısını
aydınlatmada kullanılabilir. (Balasubramanyam and Kumar, 1987; Shen and Matthai,
1991; Shan et al., 1988; Crumbacker et al., 1989; Dobaczewski et al., 1993; van
Schilfgaarde et al., 1994; Zainabidinov et al., 1995; Phatak et al., 1995-II; Bardi et al.,
1996-II; Çankaya et al., 1999-I; Çankaya et al., 2000a; Çankaya et al., 2000b; Gworek et
al., 2001; Çankaya and Uçar, 2002a; Çankaya and Abay, 2005).
Son
zamanlarda
yapılan
çalışmalar
metal-yarıiletken
kontakların
engel
yüksekliğinin basınca bağlılığının yarıiletkenin elektronik yapısına ve iyonik yapısına
yansıdığını göstermektedir. Bundan hareketle yarıiletken malzemelere dışardan bir etki
uygulayarak farklı özelliklerini ortaya çıkarmak mümkün olabilir ve bu özellikleri
kullanarak arzu edilen yapıda devreler imal edilebilir. Yarıiletken malzemelerin hassas
olmalarından dolayı bunların optik ve elektriksel özelliklerinin, yasak band aralıklarının,
derin ve sığ kusur seviyelerinin incelenmesi ve bu özelliklerinin açığa çıkarılabilmesi
konusunda hidrostatik basınç altında yapılan çalışmalarla oldukça fazla bilgi sağlanmıştır.
Buradan hareketle birçok algılayıcı-dönüştürücü elektronik yapılar tasarlanmıştır.
Bu çalışma iki temel konu üzerine yoğunlaşmıştır; ilk olarak, Hidrostatik basıncın
Schottky kontaklar üzerindeki etkisini ve kontak parametrelerinin nasıl değiştiğinin ve
bunun sonucu olarak sensör uygulamalarına uygun olup olmadığının araştırılmasını
kapsamaktadır. İkinci kısımda ise bazı deneysel verileri kullanarak numuneyi literatürdeki
farklı yöntemlerle inceleyip günümüzde artık ekonomiden astronomiye kadar tartışılmaz
bir optimizasyon yöntemi olan ANFIS ile inceleyip, deneysel veri aralığında basınç
değerleri için alınmayan sonuçların üretilmesi ve böylelikle tam bir karakterizasyonun elde
edilmesi amaçlanmaktadır.
4
2.SCHOTTKY DİYOTLAR HAKKINDA GENEL BİLGİLER
2.1.Schottky Diyotların Gelişim Süreci
Metal-yarıiletken kontaklar iki kısımda ele alınır: Teknolojik olarak gelişimleri ile
bu yapıların teorik ve deneysel olarak incelenmesi. İlk metal-yarıiletken yapı, nokta kontak
diyotlardır.
Metalleri kullanarak yarıiletkenlere kontak yapımı ilk kez 1874’te Braun
tarafından rapor edilmiştir. Geliştirildikleri yüzyıl içinde bu doğrultucular, endüstriyel
açıdan önemli üç deneyime sahip olmuştur. Bunlar 20. yüzyılın başlarında radyo dedektörü
olarak, ikinci dünya savaşında radar dedektörü ve bipolar entegre devrelerin anahtarlama
hızlarını artırmada ve günümüzde mikrodalga diyot ve transistörlerde kapı olarak
kullanılmalarıdır. Bu adımlar teknolojide yeniliklerin başlangıcı olmuştur.
Braun’un çalışmalarından yola çıkarak Marconi, 1895 yılında telekomünikasyon
için yaptığı deneylerde nokta kontak metal-yarıiletken doğrultucularını dedektör olarak
kullanmıştır. 1909 yılında Marconi ve Braun telsiz telgraf çalışmalarına katkılarından
dolayı Fizik Nobel Ödülünü almışlardır (Rhoderick and Williams, 1988).
1930’lu yıllarda mikrodalga radarının gelişmesiyle nokta kontak diyotları frekans
dönüştürücüsü olarak mikro dalga dedektör devrelerinde kullanılmıştır. Yükseltmelerinin
düşük olması nedeniyle yerini vakum tüplere bırakmıştır. Bu aynı zamanda Transistörün
icadı için ilk adımdır (Torrey and Whitmer, 1948).
1931 yılında Schottky, Störmer ve Waibel, akım akmaya başladığında kontağın
tamamında potansiyelin düştüğünü gözlemleyip bir çeşit engel yüksekliğinin varlığını
bildirmişlerdir.
1930’un sonlarında Schottky ve Spenke, enerji üzerinden taşıyıcı difuzyonunu
esas alan doğrultma teorisini bulmuşlar; Deplasyon tabaka engeli, Metal ile yarıiletken
arasındaki iş fonksiyonunu farkından dolayı engel yüksekliğinin bağımlılığı, Engel
5
üzerinden çoğunluk taşıyıcılarının iletimi ve imaj kuvvetinin düşüşünün önemi
vurgulamışlardır.
1940’lı yıllarda Schottky, difüzyon teorisini, Bethe ise termoiyonik emisyon
teorilerini geliştirmişlerdir (Rideout, 1978). Daha sonraları Crowell ve Sze bu iki teoriyi
birleştirerek, İdeal Schottky diyotlarda akım iletim mekanizmasını Termoiyonik difüzyon
emisyon teorisi olarak sunmuşlardır (Crowell and Sze, 1965, Crowell and Sze, 1966).
1960’lı yıllar Schottky engel diyotlar için önemli yıllar olmuştur ve düzlemsel
Schottky diyotların bulunmasıyla uygulamada dev bir adım atılmıştır. İlk olarak Alan
Etkili Transistörlerin, kapı terminalinde Schottky eklemi kullanılarak daha hızlı unipolar
transistörlerin üretilmesi olmuştur. Diğer taraftan yüzey kirliliğinden uzak, yarıiletken
yüzeyi altında silisyum ile metalin alaşımı yapılarak düşük sıcaklıkta silisit elde edilmesi
olmuştur ki yeni metal–yarıiletken eklemlerinin ve üretim tekniklerinin çeşitliğinin temeli
atılmıştır.
1964 yılında Baird bir silikon bipolar transistör ile Schottky engeli aynı yapı
üzerinde birleştirerek patent almıştır.
1970’li
yıllarda teorik çalışmalar
uygulamaya
dönüşerek ticari
hayata
geçirilmiştir. Yüksek frekanslar ve çok yüksek anahtarlama hızları Schottky diyotları
vazgeçilmez kılmıştır. En önemli uygulamaları Bilgisayar ve diğer anahtarlama sistemleri
için yüksek hızda unipolar entegre devrelerindeki kesim-doyum arasındaki süreleri
azaltmaktadır. Ayrıca Mikrodalga iletişim sistemlerindeki yükseltme devreleri ve sinyal
algılaması için yüksek frekans elemanları olarak uygulamalarda kullanılmıştır.
Germanyum p-n eklem diyot gibi silikon Schottky engel yüksekliği de (yaklaşık
0.7 eV) silikon p-n eklemin iç potansiyelinden ( ≅ 1.1eV ) daha düşüktür. En küçük azınlık
taşıyıcının depolama özelliği ile bu faktör; Transistör-Transistör Lojik (TTL) ve entegre
edilmiş enjeksiyon lojik (I2L) gibi entegre devrelerde birleştirici diyot olarak ideal bir
şekilde uyum sağlamakla birlikte Schottky diyotların yapımına da olanak sağlar. Bu
bipolar devrelerin anahtarlama hızını artırırken, güç tüketiminde daha da azaltmıştır. Kapı
başına 10 mW güç tüketiminde yaklaşık 2 ns’lik bir yayılma gecikmesi birleştirilmiş
6
Schottky TTL’nin günümüz teknolojisindeki tipik bir sonucudur. Günümüzde bu
teknolojiler hız konusunda birbiriyle yarışan bilgisayar üreticileri için vazgeçilmez
olmuştur. Üretim ve kontrol tekniklerinin gelişmesiyle bu yarış akıl almaz bir ivme
kazanmıştır.
Schottky diyotların en belirgin dezavantajları ise yüzey elemanı olmalarından
dolayı yüzey kirliliği ve çevresindeki problemlere hassasiyetleridir. Diğer taraftan Schottky
kontaklar yüksek sıcaklıklarda istenilen performansı verememektedir.
Metal-yarıiletken
ve
metal-yalıtkan-yarıiletken
yapılarının
temel
fiziksel
özellikleri ve iletim mekanizmaları geniş bir şekilde verilmiştir. (Milnes 1972, Sze 1981,
Kar 1982, Singh 1985, Rhoderick 1988, Cova 1990). Bu çalışmalara ilaveten yüksek seri
dirence sahip Schottky diyotlarda; seri direnç, idealite faktörü ve engel yüksekliği gibi
temel fiziksel parametrelerin tayininde yeni yöntemler geliştirilmiştir. Bunlardan ilki
Missous ve arkadaşları tarafından geliştirilen ve Missous eğrileri olarak bilinen hesaplama
yöntemidir (Missous et al., 1985). İkinci olarak Norde tarafından, ideal durum (n=1) için
seri direnç ve engel yüksekliğini tanımlanan bir F (V ) fonksiyonu yardımıyla elde edilmesi
amaçlanmıştır (Norde, 1979). İleriki yıllarda Bohlin (1986), bu modeli modifiye etmiştir.
Daha sonra ideal ve ideal olmayan diyotlar için Cheung tarafından düz beslem I − V
karakteristikleri kullanılarak Schottky diyotlarda engel yüksekliği, idealite faktörü ve seri
direnci hesaplamak için farklı bir hesaplama modeli daha ileri sürülmüştür (Cheung ve
Cheung 1986).
Karataş and Türüt (2006), Au/n tipi GaAs Schottky engel diyotlarının arayüzey
yapısındaki yoğunluk yayılmaları ve elektronik saptamalarını yapmışlar, Cheung
fonksiyonlarıyla I − V ve C − V ölçümlerinden diyot parametreleri olan idealite faktörü,
seri direnç ve engel yüksekliğini, sırasıyla1.51-1.78, 7.597-8.167 Ω ve 0.88-1.14 eV olarak
bulmuşlardır
Tsormpatsozlou et al. (2006), düşük frekans ve 160K-199K sıcaklıkları arasında
InAs kuantum noktaları içeren Au/n-GaAs Schottky diyotlarındaki sınırlı durumların
gürültü spektroskopisini incelemişler, tek sıralı kuantum noktalarının diyotun içindeki
7
Fermi Seviyesinin üstünde sığ bir tuzak seviyesi 0.037 eV civarındaki aktivasyon
enerjisiyle ortaya çıkarıldığını ve üç sıralı kuantum noktalarının diyodun içindeki sığ
seviye ilaveten yarı boşluktan aşağı yerleştirilen 0.1 eV’da derin bir seviye
gözlemlemişlerdir.
Biber (2003), MIS Cu/n-GaAs ve homojen olmayan Cu/n-GaAs diyotlarının
düşük sıcaklıkta I − V karakteristiklerini incelemiş, engel yüksekliğinin hesaplamasında
kullanılan Richardson sabitinin teorik 8.16 A/cm2K2 değerine karşılık 5.033 A/cm2K2
deneysel değerini bulmuştur.
Karataş et al. (2005), Au/n-GaAs yapılarının elektriksel karakteristikleri üzerine
60
Co γ-ışınının etkilerini incelemişler, ters besleme C − V ölçümlerinden elde edilen
(φb (C − V )) engel yüksekliğinde bir artışa sebep olurken düz besleme I − V ölçümlerinden
elde edilen (φb ( I − V )) engel yüksekliğinin sabit kaldığını göstermişlerdir.
Karataş ve Altındal (2004), İdeal olmayan Zn/p-Si Schottky diyotlarının temel
parametrelerinin I − V ölçümlerinden, modifiye edilmiş Norde ve Cheung fonksiyonları
yardımıyla hesaplamışlar ve sonuçların birbiriyle ve literatürle uyum içinde olduğunu
gözlemlemişlerdir.
Karataş ve Altındal (2005b), Zn/p-Si diyotlarda temel elektriksel parametreleri,
sıcaklığa bağlı olarak I − V ve C − V ölçümlerinden Cheung fonksiyonları yardımıyla
hesaplamışlar, sonuçların birbiriyle ve literatürle uyumlu olduğunu rapor etmişlerdir.
Tavlama ve plastik deformasyon gibi teknikler numune üzerinde kalıcı bir etkiye
sahip oldukları için pek tercih edilmezler. Buna göre, Hidrostatik basınca ve Sıcaklığa
bağlı yapılan karakterizasyonlarda devre elemanları üzerinde kalıcı etkiler bırakmadıkları
için sıkça tercih edilen karakterizasyon yöntemleridir. Literatürde sıcaklığa bağlı
çalışmalar oldukça çok bulunmasına rağmen, hidrostatik basınca bağlı çalışmalar oldukça
azdır. Aynı şekilde sıcaklığa bağlı alınan ölçümlerin değerlendirilmesinde kullanılan
birçok teorik model olmasına rağmen, basınca bağlı ölçümlerin değerlendirilmesinde
kullanılan temel bir teorik model geliştirilememiştir. Bu bağlamda hidrostatik basınca bağlı
8
karakterizasyon ölçümleri elektronik sanayide ve malzeme imalatında yeni bir ufuk
açmasına yardımcı olacaktır. Schottky diyotların doğasını anlamak için son yıllarda
hidrostatik basınca bağlı karakterizasyonda gözle görülür bir artış vardır. Bunun sebebi
Schottky engel yüksekliğinin kontak için kullanılan metalin cinsinden hemen hemen
bağımsız olduğunun izahında yardımcı bir yöntem olarak kullanılmasıdır. Bu olayı
açıklamak için Fermi seviyesinin değişmediği yani engel yüksekliğinin metalden bağımsız
kalmasının izahının yapılması gerekmektedir. Literatürde bu olaya Fermi Seviyesi
Mıhlanması (FSM) denmektedir. Ancak, bu olayın sebebi netlik kazanmamış olup, birçok
teoriler geliştirilmiş olmasına rağmen tamamıyla açıklanamamış ve hala üzerinde çalışılan
güncel bir konudur.
Au : Tl / Pb1− x SnxTe / In p-n eklem diyotların hidrostatik basınç altında akım
iletimi üzerine yapılan ilk çalışmada artan basınçla düz beslem akımının hemen hemen
lineer şekilde azaldığı Hoerstel et al. (1983) tarafından rapor edilmiştir.
Dizhur et al. (2001), Au/n-GaAs(Te) tünel diyodlarda Schottky Engel
Yüksekliğin hidrostatik basınca bağlılığını incelemişlerdir. NTE>5x1018 cm-3 olması
durumunda Metal-Yarıiletken ara yüzeydeki Fermi seviyesinin pozisyonunu için Schottky
Engel Yüksekliğinin düşerek Fermi seviyesinin pozisyonunun yasak enerji aralığının
ortasına yakın bir yere kaydığını bildirmişlerdir.
Balasubramanyam and Kumar (1987), hidrostatik basınç altında yaptıkları
karakterizasyonda Al/n-Si Schottky kontaklarda Fermi seviyesinin valans bandının
maksimumuna göre hareketsiz kaldığını ve iletkenlik bandının Fermi seviyesine doğru
kaydığını; dolayısıyla n-Si’da engel yüksekliğinin basınçla değişiminin yasak enerji
aralığının basınçla değişimi ile hemen hemen aynı olduğunu gözlemlemişlerdir. Bu
çalışmada, n-Si’da engel yüksekliğinin basınçla değişimi yasak enerji aralığındaki
değişime eşit olduğundan p-Si’da basınçla engel yüksekliğinde bir değişim olmayacağı
görüşü ileri sürülmüş ve bu öngörü Mo/p-Si Schottky diyotlarda deneysel olarak
ispatlanmıştır.
9
Shan et al. (1988), Pt/GaAs Schottky diyodlarda, Engel Yüksekliği’nin basınçla
değişimini elmas sıkıştırma hücresi kullanarak ölçmüşler, Hidrostatik basıncın fonksiyonu
olarak n-GaAs’da doğal kusurlar tarafından oluşturulan derin enerji seviyelerinin basınç ile
değişimlerini karşılaştırmışlar ve doğal kusur seviyelerinin basınca bağlılığının SEY ile
aynı olduğunu bildirmişlerdir.
Crumbacker et al. (1989), artan basınca bağlı olarak oksit tabakası kalınlığı,
dielektrik sabiti, kontak alanı ve taşıyıcı konsantrasyonundaki değişimleri göz önünde
tutarak Silisyum-metal oksit yarıiletken (MOS) yapılarında ara yüzey hallerini C − V
ölçümlerinini analizi yardımıyla incelemişlerdir.
Shen and Mathai (1991), Ni-silicide/Si Schottky engel diyodunun ve Si’un yasak
enerji aralığının basınç ile değişimini teorik olarak hesap etmişler, Fermi Seviyesinin
Mıhlanmasına neden olan ara yüzey hallerinin metal etkisiyle yasak enerji aralığında
oluşan hallerden veya yasak enerji aralığındaki kusurlar veya düzensizliklerin sebep
olduğu hallerden kaynaklanabileceğini bildirmişlerdir.
Dobaczewski et al. (1993), MBE (Molecular Beam Epitaxy) tekniği ile AlGaAs
kristali üzerine Al büyüterek Schottky diyot imal etmişlerdir. Bu diyotları 0-8 kbar
aralığında hidrostatik basıncın etkisini incelemişler ve engel yüksekliğinin basınç
katsayısının n-tipi AlGaAs kristalleri için yasak enerji aralığının basınç katsayısına eşit bir
değer
gözlemlerken,
p-tipi
AlGaAs
kristalleri
için
herhangi
bir
değişim
gözlemleyememişlerdir.
Van Schilfgaarde et al. (1994), GaAs yarıiletkeni ile imal edilmiş n-tipi Pt/GaAs
Schottky engel diyotlarının basınca bağlı deneysel karakterizasyonu ile teorik modelleri
kıyasladıkları çalışmalarında, yasak enerji aralığı ile EL2’nin basınca bağılıklarının teorik
olarak hesaplanan değerlerinin sırasıyla 9.8 ve 2.5 mev/kbar olduğunu rapor etmişlerdir.
EL2 için teorik olarak hesaplanan 2.5 mev/kbar değerinin deneysel sonuç olan 2.0
mev/kbar değerine uygun olduğunu ve bu değerin deneysel olark gözlenen Schottky Engel
Yüksekliği değişimine eşit olması sebebiyle Fermi Seviyesinin Mıhlanması olayını EL2
10
kusur seviyesine atfetmişlerdir. EL2 kusuru Ga yerine geçmiş arsenik atomudur
(Dabrowski and Scheffer, 1988).
Zainabidinov et al. (1995), Ni ve Gd katkılı n-Si yarıiletkeni ile oluşturulan Au/nSi(Ni) ve Au/n-Si(Gd) Schottky engel diyotlarında basınç artarken, özdirenç, kapasitans ve
taşıyıcı konsantrasyonunun azaldığını ve saturasyon akımında da dalgalanma meydana
geldiğini gözlemlemişlerdir.
Phatak et al. (1995-II), Al ve Au/n-tipi GaAs Schottkky Engel Diyotlarını basınca
bağlı inceleyerek farklı sıcaklıklarda tavlanmış diyotların engel yüksekliklerinin basınca
göre değişimini elde etmişler, Tavlanmamış, 220
o
C ve 290 oC derecede tavlanan
diyotların engel yüksekliği ile basınç değişim katsayısını sırasıyla 9.5 ± 0.5, 9.3 ± 0.5,
9.5 ± 0.5 mev/kbar olarak elde etmişlerdir.
Bardi et al. (1996), Ga1− X Al X As kristalinin sırasıyla x’in %20 ve %64’lük
oranlarında, n ve p-tipi olan farklı kristallerini kullanarak imal ettikleri Al / Ga1− X Al X As
Schottky engel diyotlarının engel yüksekliklerinin basınçla değişimini teorik ve deneysel
olarak incelemişler, p-tipi yarıiletkende deneysel ve teorik değerlerinin uyumlu olmasına
rağmen bu değişimin n-tipi yarıiletkende gözlenen engel yüksekliği yanında ihmal
edilebilecek kadar küçük olmasını Al / Ga1− X Al X As ara yüzeyinin dahili özelliğinden
kaynaklandığını ve FSM’ndan sorumlu olarak kusur seviyelerinin bağlanma karakterinin
sorumlu tutulamayacağını bildirmişlerdir.
Gworek et al. (2001), Cu ve Ag elementlerinin GaAs yüzeyine geleneksel
buharlaştırma yöntemi ile buharlaştırılması ve Fe tek kristal tabakasının MBE tekniği ile
GaAs üzerine büyütülmesi ile oluşturulan Cu / n − GaAs (110) , Ag / n − GaAs (110) ve
Fe / n − GaAs (100) yapıları için engel yükseklikleri ve bunların basınç katsayılarını
sırasıyla 0.89, 0.90 ve 0.90-0.92 eV ve
97 m 4mev / Gpa,
97 m 4mev / Gpa
ve
109 m 7 mev / Gpa olduğunu rapor etmişlerdir.
Çankaya et al. (1999-I), hidrostatik basınç hücresi, numune tutucu ve ölçüm
sistemini özetleyip, Au/n-tipi GaAs SED’larının engel yüksekliği, idealite faktörü ve
11
basınçla değişimlerini incelemişler, artan basınçla engel yüksekliği ve seri direncin
arttığını, idealite faktöründe ise dalgalanmaların gözlendiğini bildirmişlerdir.
Çankaya et al. (2000a), Au/n-tipi GaAs SED’larının 1 MHz frekansda hidrostatik
basınca bağlı C − V ölçümlerinlerini kullanarak derin seviyelerin C − V ölçümleri üzerine
etkisini açıklamak için bir model sunmuşlardır. Bu modele göre derin seviyelerin iyonize
olmaları için gerekli ters beslem gerilim değerinin artan basınçla arttığını, C − V
ölçümlerinden elde edilen C −2 − V grafiklerinde lineerlikten saptığını gözlemlemişler. Bu
durumuda derin seviyelerin basınca karşı davranışıyla açıklamışlardır.
Çankaya et al. (2000b), Au/n-tipi GaAs SED’larının I − V ölçümlerindeki
zamana bağlı kalıcı etkilerini incelemişler, basınç uygulanıp kaldırıldıktan sonra alınan
karakteristiğin 1 kbar basınçtaki ile yaklaşık aynı olduğunu gözlemlemişler ve sonraki
basınç uygulamalarından sonra geriye dönüşün 1 kbar basınçtaki karakteristiğe eşitliğini
basıncın diyot parametrelerini iyileştirdiği sonucuna varmışlardır.
Çankaya et al. (2001), Au/p-GaSe Schottky engel diyotlarda yaptıkları çalışmada
hidrostatik basıncın diyot parametrelerine nasıl yansıdığını araştırmışlardır. Yaptıkları
ölçümlerde 0.0 kbar basınçta engel yüksekliği ve idealite faktörünün 0.727eV ve 1.07
değerlerini alırken, 7.0 kbar basınçta 0.663 eV ve 1.14 değerlerini aldığını
gözlemlemişlerdir.
Çankaya et al. (2002a), Au/n-tipi GaAs SED’larının düz beslem altında, 1kHz ve
1MHz frekanslarında C − V ölçümlerinlerinde hidrostatik basınca bağlı ölçümlerini alarak
ara yüzey hal değişimini incelemişler, artan basınçla ara yüzey hallerinin sayısında artma
olduğunu ve uygulanan basınç ile düz beslem geriliminin ters etki gösterdiğini rapor
etmişlerdir.
Çankaya and Abay (2005), p − GaTe üzerine Cd metalizasyonu yapılarak
Schottky engel diyodu üretilmiştir. Bu diyotları I − V ve C − V teknikleriyle hidrostatik
basıncın fonksiyonu olarak karakterize etmişlerdir. Artan hidrostatik basınç ile seri direnç,
idealite faktörü ve engel yüksekliğinin azaldığını gözlemlemişlerdir. I − V ölçümlerinden
12
elde edilen engel yüksekliğinin 1 MHz de C − V ölçümlerine göre daha küçük olduğunu
bildirmişlerdir. I − V ve C − V ölçümlerinden elde edilen engel yüksekliklerinin lineer
basınç katsayısının − 8.77 m 0.10mev / kbar olduğunu ve bu değerin yaklaşık olarak
GaTe’ün yasak enerji aralığının basınçla değişimine eşit olduğunu ve bundan dolayı da
FSM’nın referans seviyesinin iletkenlik bandının minimumunda olduğunu rapor
etmişlerdir.
JFET’ler n kanal ve p kanal olmak üzere iki kısma ayrılır. Alan Etkili Transistör
FET (Field Effect Transistör)’ler üç terminalden ibarettir. Bunlar kapı (Gate), kaynak
(Source) ve kanal (Drain) terninalleridir. Gövde (kanal) n-tipi bir yarıiletkenden
oluşmuştur. Kanal ve kaynak terminalleri, gövdenin alt ve üst tabanına omik direnç
yapacak şekilde bağlanmıştır. Gövdenin her iki yanı oyularak buraya p-tipi bir yarıiletken
yerleştirilmiştir. Bu kapıyı oluşturur. FET’in akım enjeksiyonu kaynaktan, akımın
toplanması kanaldan ve akımın kontrolü de kapıdan yapılır. Eklem FET yani JFET
(Junction FET) de denilen FET’lerde Gate terminalli p-n eklemden yapıldığı için bu
JFET’lerin anahtarlama hızının yavaş olmasına sebebiyet vermektedir. Schottky diyotlar
sinyal karıştırıcı, dedektör, fotodedektör yapımında ve FET’lerde kullanılmaktadır. Diğer
FET’lere nazaran bu terminal için Schottky engeli kullanıldığından bunu daha avantajlı
kılmaktadır. Ayrıca bu yapılar otomotiv sanayinde yolcu güvenliği, motor idaresinde ve
basınç sensörü olarak da ateşlemeli makinelerde ve motorların yanma odasının basıncının
ölçülmesinde kullanılmaktadır (Fricke, 1991). Schottky diyotların GHz mertebesinde
anahtarlama hızına sahip olması bunların optoelektronikte, telekomünikasyon alanında ve
taşınabilir telefonlarda kullanılmasını vazgeçilmez hale getirmiştir.
GaAs ve Alx Ga(1− x ) As gibi yarıiletkenlerin yönelimlerine göre hidrostatik basınç
sensörü olarak kullanımına ait bir çalışma Fricke tarafından yapılmıştır (Fricke, 1991).
Yapılan devre elemanları çoğunlukla basınç sensörü olarak kullanılmıştır. Bu sensörler
yüksek sıcaklıklarda çalışabilen, GaAs taban malzeme üzerine metal yarıiletken alan etkili
transistor teknolojisi uygulanılarak elde edilmiştir. Uygulama alanı, ateşlemeli makinelerin
ve motorların yanma odasındaki basıncın ölçülmesidir. Bu sensör ticari kuartz sensör ile
kıyaslandığında daha iyi sonuç vermektedir. Otomotiv sanayisinde düşük maliyetli ve daha
13
küçük sensörlere ihtiyaç vardır. Araştırma safhasında iken, kullanılan yakıtın değişen
şartlardan nasıl etkilendiği ve yakıtın en az şekilde kullanılması için gerekli şartlar bu
sensör ile tespit edilebilmektedir (Aller et al. 1996).
Schottky engeli, yüksek anahtarlama hızı ve yüksek frekans iletişimi için
MESFET
(Metal
Semiconductor
FET)
deplasyon
modunun
küçük
skaladaki
entegrasyonudur. Farklı MESFET’ler, mikrodalga güç yükseltici teknolojisinde, minumum
bozulma, geniş band ve yüksek verim sağlamaktadır. Yaklaşık elde edilen kazancın 10
GHz’de 4W olduğu bilinmektedir.
Jit and Murty (2006), yüksek ters beslemde çalışan n-GaAs MESFET kullanarak,
ortak kaynak ve ortak kanal mikrodalga osilatörleri üzerinde foto etkilerin analitik
çalışmasını yapmışlar ve ortak kaynak osilatörünün çıkış frekansının kapı-kaynak
kapasitansından çok etkilendiğine dayanarak ortak kanal ossilatörünün kapı kanal
kapasitansındaki değişikliklere duyarlı olduğunu sayısal sonuçlardan elde etmişlerdir.
Karataş
ve
Altındal
(2005a),
Au/n-GaAs
Schottky
diyotların
engel
yüksekliklerinin sıcaklıkla ilişkisini incelemişler, doğrudan etkin engel yüksekliğinin
(φb ( I − V )) , Au/n-GaAs için literatürde verilen negatif sıcaklık katsayısıyla uyum içinde
olduğunu bildirmişlerdir.
Salehi et al. (2006), hidrojen algılama uygulaması için Pd/gözenekli-GaAs
Schottky kontağı I − V karakteristiği kullanılarak incelenmiş ve Pd/gözenekli-GaAs
Schottky diyot Sensörün hidrojen gazına karşı yüksek hassasiyet gösterdiği görülmüştür.
Salehi and Nikfarjam (2004), ITO/n-GaAs Schottky kontaklarını laboratuarlarında
geliştirmişler, Karbonmonoksit’e hızlı tepki gösteren diyotun çok düşük sıcaklıkta
çalışmasından dolayı entegre devre teknolojisi için mikro ölçekli cihazlara sensör olarak
uygulanabileceğini bildirmişlerdir.
Schottky diyodların karakteristik parametrelerinin anlaşılabilmesi, yalıtkan ve
yarıiletken özelliklerinin araştırılmasının bir yolu da kristale uygun kontakların
yapılmasıdır (Crowell and Sze,1966). Kontak; iki maddenin en az dirençle (idealde sıfır)
14
birbirine temas etmesi şeklinde düşünülür ki direnç boşa harcanan güçtür. Kontak haline
getirilen yüzeylerin temiz, oksitsiz, parlak ve pürüzsüz olması aynı zamanda kontak
yapılan metalin cinsi de ideal bir kontak elde edilmesini etkiler (Card and Rhoderick, 1971;
Hovarth, et al., 1988; Rhoderick and Williams, 1988).
Farklı iki madde kontak haline getirildiğinde maddeler arasında yeni bir yük
dağılımı oluşur. Sistemde, termal dengenin bir sonucu olarak her iki maddenin Fermi enerji
seviyeleri aynı seviyeye gelinceye kadar yük transferi olur (Ziel, 1968). Fermi enerji ( E F ),
mutlak sıfır sıcaklığındaki katı ve N elektronlu sistemin taban durumundan itibaren en
yüksekteki dolu olan seviyesinin enerjisi olarak tanımlanır. Mutlak sıfır sıcaklığında bu
enerji seviyeleri üzerindeki seviyeler boştur. Fermi enerji seviyesi ise, iletkenlik ve valans
bandındaki taşıyıcı sayısına bağlı olarak, yasak enerji bölgesinde yer alan izafi seviyeye
denir, f (E) Fermi dağılım fonksiyonu ise T sıcaklığında bir katıda elektronun E enerji
seviyesine sahip olma ihtimalidir ve 2.1 eşitliği ile verilmektedir (Ziel,1968).
f (E) =
1
[− ( E F − E )]
1 + exp
kT
(2.1)
Metal-yarıiletken kontaklar, metalin ve yarıiletkenin iş fonksiyonlarına ( φ m , φ s )
bağlı olarak omik kontak ve doğrultucu kontak (Schottky kontak) olarak iki kısımda
incelenir. İş fonksiyonu ( φ m , φ s ), metal veya yarıiletkenin Fermi seviyesinden bir elektronu
sıfır kinetik enerji ile yüzeye çıkarmak için gerekli olan minimum enerji miktarına denir.
Bir metal veya yarıiletkene verilen enerji önce iş fonksiyonu için harcanır eğer verilen
enerji iş fonksiyonundan fazla ise elektrona kinetik enerji olarak aktarılır (Ziel, 1968).
Bu durum iki metal arasında olduğu gibi, metal ile n-tipi veya p-tipi yarıiletkenler
arasındaki kontaklarda da aynı şekilde tanımlanmıştır.
Bir metal ile yarıiletken, aralarında başka bir madde olmaksızın kontak durumuna
getirildiğinde, metal-yarıiletken yapı olarak adlandırılır. Metal–yarıiletken kontaklar, her
iki maddenin iş fonksiyonlarına bağlı olarak ikiye ayrılır. Birincisi taşıyıcıların bir
15
maddeden diğer maddeye her iki yöndede kolayca geçebildiği kontaklar, omik kontaklar,
ikincisi ise bir maddede bulunan taşıyıcıların bir yöndeki hareketinin diğerine göre daha
büyük veya küçük olduğu kontaklar, yani doğrultucu (Schottky) kontaklardır (Ziel, 1968).
Teorik olarak n-tipi yarıiletken metal için φ m > φ s ise doğrultucu kontak, φ m < φ s
ise omik kontak oluşur. p-tipi yarıiletken metallerde ise φ m < φ s doğrultucu kontak, φ m > φ s
iken omik kontak oluşur. Her iki durumda da referans vakum seviyesidir. Vakum seviyesi
( Evac ) ise metal veya yarıiletken dışındaki hareketsiz bir elektronun enerjisini temsil eder
(Ziel,1968). Yani elektronun maddenin dışında kinetik enerjisinin sıfır olduğu seviyeye
denir. Evac ile valans bandının maksimumu ( Evbm ) arasındaki enerji farkı ise Elektronunun
iyonizasyon enerjisi ( E s ) olarak tanımlanır.
Günümüzde endüstrideki dev adımlar, Schottky diyod yapılarını doğrudan veya
dolaylı olarak elektronik devre mimarisinde vazgeçilmez kılmıştır. Bu yapıların tam
karakterizasyonu ise ancak optimizasyonla çıkarılabilir, bütün koşullar için deney yapmak
mümkün değildir. Schottky yapıların, p-n yapılara göre üstün olduğu durumlar vardır. Bu
avantajlar; Schottky engelinde yeniden birleşme yani rekombinasyon olmayacağından
akımda azalma meydana gelmez ve verim yüksek olur. Oysa p-n eklemde yeniden
birleşme olacağından akımda azalma söz konusudur. Bütün diyot yapılarında ters
beslemede diyotlardan akan sızıntı akımının sıcaklığa bağımlılığı, Schottky yapılarda
hemen hemen yok gibidir ve kontrol edilmesi gerekmez. Schottky diyotların bu
özelliğinden dolayı kızıl ötesi yani IR (InfraRed) teknolojisinde önemli bir adım olmuştur.
Schottky engelinde anahtarlama hızı, enjekte edilen elektronların termal hızları ile kontrol
edilirken, p-n ekleminde anahtarlama hızı azınlık taşıyıcılarının yeniden birleşmesiyle
kontrol edilir ki bu Schottky yapıların frekans aralığının çok büyük olmasını (100 GHz ve
üzeri) sağlar. Schottky engelini iletime geçirmek için gerekli olan gerilim p-n eklemine
göre çok düşüktür ve tasarlanan cihazların optimal ve düşük güçlerde çalışmasına neden
olurlar. Ayrıca p-n ekleminde aynı tür yarıiletkenin hem p hemde n-tipini elde etmek
neredeyse imkansızdır yani aynı elektriksel özelliğe sahip farklı tip yarıiletken elde
edilemez. Bu durum verimin düşmesine neden olmaktadır. Schottky eklemin oluşturulması
16
p-n eklemine göre çok kolaydır. Yukarda kısaca bahsettiğimiz nedenler bizi ve birçok
araştırmacıyı Schottky yapılar ve karakteristikleri üzerine yoğunlaştırmıştır.
2.2. Metal-Yarıiletken Kontaklar
2.2.1. n-Tipi Yarıiletken-Metal Doğrultucu (Schottky) Kontak Oluşumu
Doğrultucu kontak (Schottky kontak), metal-yarıiletken kontaklarda akım
taşıyıcıların bir doğrultudan diğer doğrultuya göre daha kolayca akabildiği kontaklara
denir. n-tipi yarıiletken-metal kontaklarda, yarıiletkenin iş fonksiyonu ( φ s ) metalin iş
fonksiyonundan ( φ m ) daha küçük ( φ m > φ s ) ise oluşacak kontağa doğrultucu kontak yada
Schottky kontağı adı verilir. Doğrultucu kontaklarda kontaktan önce yarıiletkenin Fermi
seviyesi metalin Fermi seviyesinden ( φ m - φ s ) kadar yukarıdadır. Kontaktan sonra
yarıiletkenle metal arasında bir yük alışverişi olur ve denge hali oluşuncaya yani elektro
kimyasal potansiyeller (Fermi seviyeleri) eşit oluncaya kadar bu alışveriş devam eder
(Ziel,1968). Elektronlar, geride iyonize olmuş donorlar bırakarak yarıiletkenden metale
geçerler. Doğrultucu kontak oluşumu sonucunda n-tipi yarıiletken tarafındaki uzay yükleri
ile metal tarafındaki yüzey yükleri arasında zıt yüklemelerinden dolayı bir dipol tabakası
oluşur. Bu da kontakta, bir potansiyel engelinin oluşmasını sağlar. Yani yarıiletken tarafına
bantların yukarı doğru bükülmesine neden olur. Kontaktan önceki ve sonraki durumlar için
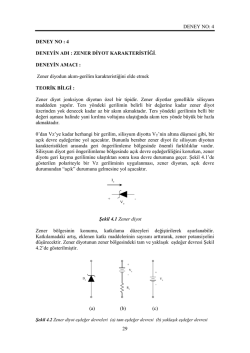
enerji band diyagramları Şekil 2.1’de görülmektedir. Metal n-tipi yarıiletken için engel
yükseklikleri: Yarıiletken tarafında
eVD = φ m − φ s
(2.2)
ve metal tarafında
eφb = φ m − χ s
(2.3)
17
eşitlikleriyle verilir. Burada e elektronun yükü, VD difüzyon potansiyeli, φ m metalin iş
fonksiyonu, φ s yarıiletkenin iş fonksiyonu, φb diyotun engel yüksekliği ve χ s yarıiletkenin
elektron ilgisidir. Yarıiletkenin elektron ilgisi ( χ s ), iletkenlik bandı ile vakum seviyesi
arasındaki enerji farkına denir (Ziel,1968). Difüzyon potansiyeli yarıiletkenin iç potansiyeli
olup metalin yüzeyine göre ölçülür.
Potansiyel engeli metal tarafında dik olarak yükselmesine karşılık yarıiletken
tarafında d genişliğine sahiptir (Şekil 2.1.b). Yarıiletken tarafındaki d kalınlığına sahip ve
elektronlardan arınmış olan bölgeye uzay yükü bölgesi, arınma bölgesi veya Schottky
bölgesi denir. Arınma bölgesinin elektronlardan arınmasıyla geriye kalan sabit pozitif
yüklü donor atomlarına “uzay yükü” denir. Bu bölgenin metal tarafında negatif yüzey
yüklerine, yarıiletken tarafında pozitif uzay yüküne sahip olduğundan bir kondansatör gibi
davranır ve bir kapasiteye sahiptir. Oluşan bu kapasiteye Schottky kapasitesi veya arınma
bölgesi kapasitesi denir. Bu Schottky kapasitesi, arınma tabakasının kalınlığı (d) ile ters
orantılı, iyonize olan donarların konsantrasyonuna ve difüzyon potansiyeli ( VD ) değerine
ile doğru orantılı olacağı açıktır (Rhoderick ve Williams, 1988). Bu kapasite p-n yapılarda
jonksiyon kapasitansı olarak bilinir ve Schottky kapasitesiyle karşılaştırılamayacak kadar
büyüktür, yüksek frekanslarda distorsiyona sebep olur.
18
Metal
φm
n-Tipi Yarıiletken
φs
Vakum Seviyesi
χs
EC
Efs
VD
φb = φ m − χ s
Efm
Efm
φs − χ s
EV
d
(a)
(b)
Şekil 2.1. Metal/n-tipi yarıiletken doğrultucu (Schottky) kontak
(a) Kontaktan önce
(b) Kontaktan sonra
Kontak haline getirilmiş ve dengedeki metal n-tipi yarıiletken Schottky kontakta
metaldeki bazı elektronlar termal uyarılma nedeniyle yeterli enerjiye sahip olduklarından
potansiyel engelini geçip metalden yarıiletkene ve bazıları ise ters yönde yani
yarıiletkenden metale geçerler. Bu geçişlerde eşit ve ters yönlü I 0 akımları oluşur. Eğer
yarıiletkene − V büyüklüğünde bir negatif potansiyel uygulanırsa metalden yarıiletkene
giden elektronlar için engel değişmeyeceğinden bu elektronların oluşturacağı akımda da bir
değişiklik olmayacaktır. Bunun yanı sıra yarıiletkenin iletkenlik bandındaki enerji
seviyeleri eV
kadar yükselecektir. Bundan dolayı yarıiletkenden metale geçecek
elektronlar için engel yüksekliği eV kadar azalır. Buna bağlı olarak metalden yarıiletkene
akan akım exp( eV / kT ) çarpanı kadar artar. Oluşan net akım ise;
eV
I = I 0 exp
− 1
kT
(2.4)
19
eşitliği ile verilir. Burada I 0 doyma akımı, V uygulanan potansiyel, k Boltzman sabiti ve
T mutlak sıcaklıktır.
Ara yüzey tabakası ve Schottky etkisi hariç tutulursa, metal tarafındaki engel
yüksekliği uygulanan V voltajından bağımsız olduğundan sabittir. Yarıiletken tarafında ise
engel yüksekliği uygulanan V voltajı ile doğru orantılı olarak değiştiğinden engel
yüksekliği sabit değildir. Bu durum Şekil 2.2.a ve Şekil 2.2.b’de gösterilmektedir.
Metal
n-Tipi Yarıiletken
VD-V
φm − χ s
Metal
EC
Efs
Efm
n-Tipi Yarıiletken
φm − χ s
VD+V
Efm
-V
EC
Efs
EV
+V
d
d
(a)
EV
(b)
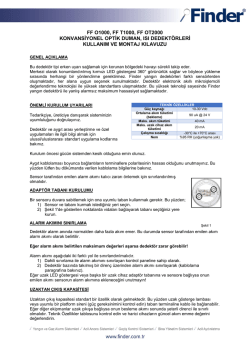
Şekil 2.2. Düz ve ters beslem altındaki Metal/n-tipi yarıiletken doğrultucu kontak
(a) V < 0 olması durumunda enerji band diyagramı,
(b) V > 0 olması durumunda enerji band diyagramı.
Metal/n-tipi yarıiletken Schottky kontaklarda yarıiletken tarafına − V (V < 0)
negatif voltaj uygulanırsa kontak düz beslemde (ileri yönde kutuplama), + V (V > 0)
pozitif voltaj uygulanırsa kontak ters beslemde (ters yönde kutuplama) denir.
20
2.3.Metal n-Tipi Yarıiletken Omik Kontaklar
Omik kontak, metal-yarıiletken kontaklarda akım taşıyıcıların iki yönde de
kolayca aktığı kontaklara denir. Yarıiletkenin iş fonksiyonu metalin iş fonksiyonundan
büyük ( φ s > φ m ) ise kontağa omik kontak denir (Deneuville, 1974). Kontaktan önce
yarıiletkenin Fermi seviyesi metalin Fermi seviyesinden ( φ m - φ s ) kadar aşağıdadır. Metal
ve yarıiletkenin kontaktan önceki enerji-band diyagramları Şekil 2.3.a’da gösterilmiştir. Bu
durumda kontak haline gelen metalden elektronlar yarıiletkenin içine doğru akarlar. Bu
akış termal dengeye kadar devam etmektedir. Termal denge sağlandığında metal tarafında
pozitif yüzey yükleri birikirken, yarıiletken tarafında negatif uzay yükleri birikmiş olur. Bu
zıt yükler bir dipol tabakası oluştururlar. Kontak haline getirilmiş ve dengedeki metal n-tipi
yarıiletken omik kontakta metalden yarıiletkene ve yarıiletkenlerden metale kolayca yük
akışı olur. Metal-yarıiletken kontaktan sonraki enerji band diyagramı Şekil 2.3.b’de
gösterilmiştir.
Omik kontağa V voltajı uygulanırsa, potansiyel Schottky kontakta olduğu gibi
sadece Schottky bölgesinde değil bütün yarıiletken gövde boyunca dağılacaktır. Normalde
omik kontak elde edebilmek için n-tipi yarıiletkenin yüzeyine metal buharlaştırılır ve
yarıiletkenle alaşım haline gelmesi için önceden optimize edilmiş veya literatürde belirtilen
sıcaklıkta tavlanır. Böyle bir tavlanma neticesinde yarıiletkenin yüzeyinde bir n + tabakası
oluşturulmuş olur. Bu tabaka yarıiletken gövdeye göre elektron bakımından daha zengindir
(Sze, 1981).
21
Metal
Efm
n-Tipi Yarıiletken
Vakum Seviyesi
EC
φm
φs
φ s − χ s Efs
Efm
χs
χ s − φm
φ s − φm
EC
Efs
EV
EV
(a)
(b)
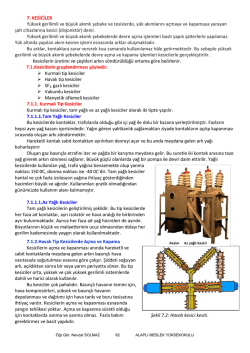
Şekil 2.3. Metal/n-tipi yarıiletken omik kontak
(a) Kontaktan önce
(b) Kontaktan sonra .
Metal/n-tipi yarıiletken omik kontakların yarıiletken tarafına negatif ve pozitif
gerilim uygulanması durumunda enerji-band diyagramı Şekil 2.4.a ve b’de gösterilmiştir.
EC
Efm
EV
EC
EV
(a)
(b)
Şekil 2.4. Düz ve ters beslem altındaki Metal/n-tipi yarıiletken omik kontak
(a) (V < 0) olması durumunda enerji band diyagramı
(b) (V > 0) olması durumunda enerji band diyagramı.
22
2.4. Metal (Omik)-n-Tipi Yarıiletken–Metal (Schottky) Yapısı
n–tipi yarıiletkenin bir yüzeyinin omik kontak olması için elektron bakımınca
zengin (n + ) bir bölge, diğer yüzeyinin ise Schottky kontak olması için bir metal (M)
buharlaştırılarak metal n-tipi yarıiletken Schottky diyodu elde edilmiş olur. Bu yapı n + nM
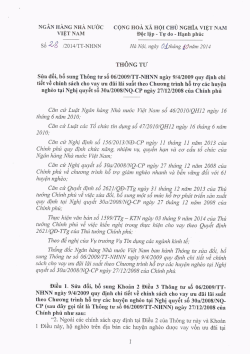
ile gösterilir. Termal denge durumunda ki enerji-band diyagramı Şekil 2.5.’de verilmiştir.
Yarıiletken
Metal
Metal
Vd
φb
EF
d
Schottky
Kontak
Omik
Kontak
Şekil 2.5. Termal dengede n-tipi Schottky diyodunun enerji band diyagramı
n + nM karakteristik bakımdan diyot özelliği gösterdiğinden bunlara Schottky
diyodlar denir. Bu yapıyı düz beslemek için omik kontak tarafı negatif (V < 0) , voltaj ters
beslemek için omik tarafı pozitif bir voltaj (V > 0) uygulanmalıdır.
23
2.5.Schottky Diyotlarında Termoiyonik Emisyonla Akım İletimi
Termoiyonik emisyon; sıcak bir yüzeyden termal enerji nedeniyle taşıyıcıların
salınması olayına denir. Termoiyonik emisyon teorisi metal yarıiletken Schottky
diyotlarında taşıyıcıların kazanacağı termal enerji nedeniyle potansiyel engeli aşarak
yarıiletkenden metale veya metalden yarıiletkene geçmesi sırasındaki akım olaylarını izaha
çalışmaktadır. Metal n-tipi yarıiletken yapılarda bu olay elektronlar, metal p-tipi yarıiletken
yapılarda ise holler tarafından yani Schottky diyotlarında akım çoğunluk taşıyıcıları
tarafından sağlanır. Termoiyonik emisyon, doğrultucu kontağın potansiyel engelinin kT
enerjisinden büyük ve Schottky bölgesindeki taşıyıcı çarpışmalarının da çok küçük olduğu
kabul eder (Ziel, 1968; Rhoderick and Williams, 1988).
Termoiyonik emisyon teorisine göre net akım yoğunluğu ifadesi;
eV
J = J 0 exp
− 1
kT
(2.5)
eşitliği ile verilir (Rchoderick ve Williams, 1988). Burada J 0 doyma akım yoğunluğu,
V uygulanan voltaj, k Boltzman sabiti, T Mutlak sıcaklıkdır. J 0 doyma akım yoğunluğu
ise
eφ
J 0 = A∗T 2 exp − b
kT
(2.6)
şeklindedir. Burada A∗ Richardson sabiti, eφb yarıiletkenin iletkenlik bandının alt sınırı
sıfır alındığında metal tarafındaki potansiyel engel yüksekliğidir. Richardson sabiti ve
potansiyel engel yüksekliği ise
A∗ =
4πmn∗ k 2 e
h3
eφb = eVD + E F
eşitlikleri ile verilir.
(2.7)
(2.8)
24
2.6. Missous Yöntemi ile Schottky Diyot Parametrelerinin Belirlenmesi
1985 yılında Missous ve Rhoderick tarafından Schottky diyot parametrelerinin
hesaplanmaları için düz beslem ve ters beslem I − V karakteristikleri kullanarak yeni bir
hesaplama yöntemi ileri sürdü. (Missous and Rhoderick, 1985). Termoiyonik emisyon
teorisinden bulunan akım yoğunluğu ifadesi diyotun A etkin alanıyla çarpılırsa, diyottan
akan toplam akım,
eφ
I = AJ = AA∗T 2 exp − b
kT
eşitliğiyle
verilir.
Genellikle
eV
exp
kT
uygulanan
− 1
potansiyel
(2.9)
tümüyle
arınma
bölgesinde
düşmediğinden idealden sapmalar olacaktır. Bu sapmalar boyutsuz bir sabit olan idealite
faktörü n ile ifade edilir. Bu durumda;
eφ
eV
eV
I = AJ = AA∗T 2 exp − b exp
1 − exp −
nkT
kT
kT
(2.10)
eşitliği elde edilir. 2.10 eşitliği aşağıdaki formda da yazılabilir. Burada 2.10 eşitliğinin
eφ
AA∗T 2 exp − b çarpımı I 0 doyma akımını olarak alınırsa,
kT
eV
eV
I = I 0 exp
1 − exp −
nkT
kT
(2.11)
elde edilir. Buradan
I
eV
I 0 exp
=
nkT 1 - exp − eV
kT
eV
ifadesi bulunur. 2.12 eşitliğinin logaritması alınıp I 1 - exp −
kT
(2.12)
− V grafiği çizildiğinde,
bu grafiğin lineer kısmına fit edilen doğrunun V = 0 da düşey ekseni kestiği noktadan I 0
doyma akımı ve doğrunun eğimi belirlenir, sırasıyla engel yüksekliği ve idealite faktörü
hesaplanır.
25
2.7. Norde Fonksiyonları ile Schottky Diyot Parametrelerinin Belirlenmesi
Metal-Yarıiletken yapıların akım iletim mekanizmaları ve diğer özellikleri önceki
bölümlerde bir kısmından bahsedilen yöntemlerle irdelenmiştir. Özellikle yüksek seri
dirence sahip metal-yarıiletken kontaklarda, seri direnç, idealite faktörü ve engel
yüksekliği gibi fiziksel (elektronik) parametrelerin tayin edilmesi amacıyla yeni yöntemler
geliştirilmiştir. Bunlardan ilki Norde tarafından n = 1 durumu için seri direnç ve engel
yüksekliğini tanımlayan, F (V ) fonksiyonudur. Bu yöntem Rs ve φb ’nin sıcaklıkla
değişmediği durumlarda uygulandığı için sadece bir sıcaklıkta I − V eğrisine ihtiyaç vardır
(Norde, 1979).
Sato ve Yasamura, Norde tarafından sunulan yöntemi geliştirerek idealite
faktörünün 1’den büyük olduğu durumlarda da
(1 < n < 2)
hesaplanabileceğini göstermişlerdir. Bu yöntem Rs
n , Rs ve φb değerinin
ve φb ’nin sıcaklığı değiştiği
durumlarda da uygulanabileceğinden en az iki farklı sıcaklıktaki I − V eğrisine ihtiyaç
vardır. Benzer yöntem Mc Lean tarafından da belirtilmiştir (Sato and Yasamura, 1985).
Termiyonik emisyon teorisine göre Schottky diyotların da düz beslem altındaki
akım-gerilim ilişkisi;
eφ
I = AA∗T 2 exp − b
kT
eV0
exp
kT
− 1
(2.13)
şeklindedir. Burada ilk çarpan I o doyma akımı V0 ise engel tabakası boyunca gerilim
düşmesidir. Pratik olarak Schottky diyodları düz beslem akım-gerilim karakteristiklerinde
ideal durumlardan bazı sapmalar gösterebilir (n > 1) gibi. Bundan dolayı eşitlik 2.13’deki
akım ifadesi;
eV
eV
eφ
I = AA∗T 2 exp − b exp 0 1 − exp − 0
kT
nkT
kT
(2.14)
26
şeklini alır. Burada exp − eV0
<< 1 durumu göz önüne alınırsa ve Schottky diyoduna
kT
uygulanan V geriliminin bir kısmının seri direnç üzerine Vo = V − ΙRs şeklinde düşeceği
düşünülürse eşitlik 2.14 ifadesi;
eφ
e(V − IRs )
I = AA∗T 2 exp − b exp
kT
nkT
(2.15)
şeklinde yeniden düzenlenebilir. Burada V dışardan uygulanan gerilimi, Rs de seri direnci
göstermektedir.
Termoiyonik emisyon teorisi sadece diyodun düz beslem I − V karakteristiğinin
lineer bölgesinde kullanılır. Yüksek seri direnç nedeniyle lineer bölge kT e << V << IRs
aralığıyla sınırlanır ve daralma gösterir. Bu durum Ln(Ι ) − V grafiğinin değerlendirilmesi
daha karışık bir hal alır ve bu bölgede doyma akımı I 0 ve engel yüksekliği (φb ) değeri
güvenilir olarak hesaplanamaz. Rs , φb ve n değeri hesaplamak için daha güvenilir
metotlar mevcuttur. İlk olarak Norde tarafından sunulan fonksiyon aşağıdadır.
F (V ) =
V kT I
− ln
2 e AA∗T 2
(2.16)
Bu F (V ) fonksiyonu yardımıyla n = 1 için, Rs , φb ’nin hesaplanmasına
çalışılmıştır. Bu yöntemle Rs , φb ’nin sıcaklıkla değişmediği durumlarda geçerli
olduğundan tek bir I − V eğrisine ihtiyaç vardır. Daha sonra Sato ve Yasamura, Norde
tarafından sunulan teoriye geliştirerek idealite faktörünün 1’den büyük olduğu (1 < n < 2 )
durumlarda Rs , φb ve n parametreleri hesapladılar. Eşitlik 2.13 ‘in her iki tarafının Ln ’i
alınıp eşitlik 2.14’da yerine yazıldığında,
IRs
n−2
F (V ) =
+ φb
V +
n
2n
(2.17)
27
(
elde edilir. Burada Rs = 0 ideal durumu için F (V ) − V grafiğinin eğimi n − 2
2n
) olan bir
doğrudur ve F (V ) eksenini V = 0 ’da kestiği nokta φb ’yi verir. Bu arada seri direnç
sıfırdan farklı ise F (V ) fonksiyonu bir minimumda geçer ve
F (V ) =
V kT
I
− ln
∗ 2
2 e AA T Rs
(2.18)
şeklinde verilebilir. Eşitlik 2.14’ün V ’ye göre türevi alınıp eşitlik düzenlenirse,
βIRs n − 2 + βIRs
∂F (V ) 1 n − 2
=
+
=
∂V
2 2
n + β IRs 2(n + β IRs )
(2.19)
olur. ( β = kT / e ) ve ∂F (V ) / ∂V = 0 şartında F (V ) bir minimum geçer. Minimumdan
geçen akım I 0i , gerilim değeri ise V0i dir. Burada,
n − 2 + β I 0i Rsi
=0
2(n + β i I 0i Rsi )
(2.20a)
n − 2 + β I 0i Rsi = 0
(2.20b)
yazılır. Burada Rsi ve φb için sırasıyla
Rsi =
(2 − n) − kTi
I 0i
e
2−n
2−n 1
2 − n V0i kTi
= F (V0i ) +
−
V0i −
e
2n
n βi
n 2
φb = F (V0i ) +
(2.21)
(2.22)
eşitlikleri çıkarılır. Burada Rsi , β i , V0i ve I 0i (i =1, 2,……….n) farklı sıcaklıklara karşılık
gelen değerlerdir. K.E Bohlin ise Schottky engel diyodunun I − V ölçümünden elde edilen
Rs , φb ve n değerlerinin belirlenmesini mümkün kılan iki farklı fonksiyon tanımlamıştır
28
(Bohlin, 1986). Norde fonksiyonun ilk terimi olan
V
V
yerine
terimi kullanılmıştır.
2
γ
Buradaki γ idealite faktöründen büyük olmak kaydıyla (γ > n ) keyfi bir sabittir. Bu
durumda Norde fonksiyonu,
F (V , γ ) =
V
γ
−
1 I
ln
β AA∗T 2
(2.23)
şeklinde yazılır. Yine eşitlik 2.13 ’de her iki tarafın Ln’i alınırsa
IR
1 1
F (V , γ ) = − V + φb + s
n
γ n
(2.24)
eşitliği elde edilir. İdeal diyotta seri direncin sıfır olduğu düşünülürse F (V , γ ) ’nın V ’ye
bağlı grafiği, eğimi (n - γ )
F (V , γ ) =
V
γ
−
γ olan bir doğru olur ama seri direnç varsa bu fonksiyon,
1
V
ln
∗ 2
β Rs AA T
(2.25)
biçiminde olur. Yüksek voltaj değerleri için bu fonksiyon; eğimi 1/ γ olan bir doğruya
yaklaşır. γ değeri n ’den büyük olduğu sürece fonksiyon kesim olarak bir minimumdan
geçer.
F (V , γ )
fonksiyonun V ’ye göre türevini alıp minimum noktada sıfıra
eşitlediğimizde,
I0 =
γ −n
βRs
(2.26)
eşitliği elde edilir. Burada ki I 0 ve V0 değeri minimum noktadaki akım ve gerilim
değerleridir. Sonuç olarak engel yüksekliği ve seri direnç ifadeleri
29
(γ − n)
1 1
φb = F (V0 , γ ) + − V0 −
βn
n γ
Rs =
(γ − n )
βI 0
(2.27)
(2.28)
şeklinde olur.
2.8. Cheung Fonksiyonları ile Schottky Diyot Parametrelerinin Belirlenmesi
1986 yılında Cheung tarafından Schottky diyot parametrelerinin hesaplanmaları
için düz beslem I − V karakteristikleri kullanarak farklı bir hesaplama modeli ileri sürüldü
(Cheung ve Cheung, 1986). Termoiyonik emisyon teorisinden bulunan akım yoğunluğu
ifadesi diyotun A etkin alanıyla çarpılırsa, diyottan geçen toplam akım boyutsuz bir sabit
olan idealite faktörünün dikkate alınması durumunda akım;
eφ
eV
eV
I = AA∗T 2 exp − b exp 0 1 − exp − 0
kT
nkT
kT
(2.29)
eşitliği ile verilir. Burada eV0 >> 3kT olduğundan 2.29 eşitliğindeki exponansiyel ifade 1
yanında çok küçük olacağından ihmal edilirse
eφ
eV
I = AA∗T 2 exp − b exp 0
kT
nkT
(2.30)
şekline dönüşür. Burada V0 diyot bölgesinde düşen voltajdır. Bu voltajın, uygulanan voltaj
ve seri dirençten dolayı (nötral bölgesinin direnci) düşen voltajların farklı olduğu göz
önünde alınırsa V0 = V − IRs şeklinde yazılabileceği açıktır. Dolayısıyla akım eşitliği;
eφ
e(V − IRs )
I = AA∗T 2 exp − b exp
kT
nkT
şekline dönüşür. Bu son eşitliğin algoritması alınır V çekilirse,
(2.31)
30
nkT I
V =
+ nφb + IRs
ln
∗ 2
e AA T
(2.32)
olur. Bu son eşitliğin ln I ya göre diferansiyeli alınırsa
dV
nkT
=
+ IRs
d (ln I )
e
eşitliği elde edilir. Bu ifadeye birinci Cheung fonksiyonu denir. Bu son ifade de
(2.33)
dV
d (ln I )
nin I ya karşı grafiği çizilirse bu bir doğru olacaktır. Bu doğrunun eğimi ve düşey eksenini
kestiği noktasından sırasıyla Rs seri direnç ve n idealite faktörü değerleri bulunur (Cheung
ve Cheung, 1986). Ayrıca engeli yüksekliği φb ’yi bulmak için aşağıdaki şekilde bir H (I )
fonksiyonu olarak tanımlanmıştır.
nkT I
H (I ) = V −
ln
∗ 2
e AA T
(2.34)
Eşitlik 2.32’deki V ifadesi bu son ifade de yerine yazılır ise
H ( I ) = nφb + IRs
(2.35)
ifadesi elde edilir. Bu tanımlanan ifadeye ise ikinci Cheung fonksiyonu denir. H ( I ) ’ya
karşı I grafiği çizilirse yine bir doğru verecektir. Bu doğrunun eğimi ve H ( I ) ’nin
ekseninin kesim noktasından sırasıyla nötral bölge direnci olan seri direnç Rs ve eφb
engel yüksekliği bulunur.
31
3.YAPAY SİNİR AĞLARI
Yapay sinir ağı, biyolojik sinir ağına benzer şekilde, belirli bir performans
karakteristiğine sahip bilgi işleme sistemidir. Yapay sinir ağları, sinir biyolojisinin
matematik modelleri genelleştirilerek aşağıdaki temeller üzerine geliştirilmiştir (Faussett,
1994).
1. Bilgi işleme, hücre (neuron) adı verilen basit elemanlar üzerinde gerçekleşir.
2. Sinyaller, hücreler arası bağlantılar üzerinden, bir hücreden diğerine geçer.
3. Tipik bir sinir ağında, her bir bağlantı bir ağırlığa sahiptir ve bu ağırlık bağlantı
üzerinden geçen sinyalin çarpanıdır.
4. Her bir hücre kendi çıkışını belirlemek için net girişlerine, genellikle doğrusal
olmayan bir aktivasyon fonksiyonu uygular.
Beyin veya sinir hücresi ile işlem birimi (yapay hücre) yapıları arasında çok yakın
bir benzetim vardır. İşlem birimi yapısının anlaşılabilmesi açısından, biyolojik hücre üç
temel bileşene ayrılmıştır: dendritler (uç), soma (çekirdek) ve akson (iletim hattı).
Biyolojik sinir hücresinin yapısı Şekil 3.1'de gösterilmiştir. Dendritler diğer hücrelerden
gelen sinyalleri almaktadırlar. Sinyaller, sinaps (synaps) boşluğundan kimyasal işlemler
aracılığı ile geçen elektriksel dürtülerdir (puls). Soma, dendritlerden gelen sinyalleri
toplamaktadır. Yeterli giriş alındığında hücre etkinleşmekte, yani akson üzerinden diğer
hücrelere sinyal göndermektedir. Genellikle, herhangi bir anda hücrenin etkin olduğu ya da
olmadığı varsayılırsa, gönderilen sinyaller ikili (binary) gibi davranmış olurlar. Bununla
birlikte, hücrenin etkinleşme frekansı değişkendir. Bir sinyalin belirli bir hücreden
gönderilmesi, hücre akson zarının her iki tarafındaki iyon yoğunluğunun farklı olmasından
kaynaklanan aksiyon potansiyeli aracılığı ile gerçekleşmektedir. Buradaki iyonlar;
potasyum, kalsiyum ve klorid iyonlarıdır (Yang et al. , 1997).
32
Şekil 3.1. Biyolojik nöron
Yapay sinir ağlarının bir başka önemli karakteristiği ise, tıpkı biyolojik sinir
sisteminde olduğu gibi, hata tolerans özelliğine sahip olmasıdır. Biyolojik sinir sistemi iki
çeşit hata toleransına sahiptir.
Birincisi, daha önce karşılaşılmış olan sinyallerden farklı bir sinyalle
karşılaşıldığında bunun farkedilmesidir (Narendra and Mukhopadhyay, 1997)
İkincisi, sinir sisteminin kendisinde meydana gelen zararın tolere edilmesidir.
Örneğin; insan doğduğunda yüz milyarlarca beyin hücresine sahiptir. Zamanla hücreler
öldüğünde yenisi ile değiştirilememektedir. Hücre ölümü sürekli olmasına rağmen insanın
öğrenmesi devam etmektedir. Böyle durumlarda, kaybedilen hücrelerin fonksiyonunu diğer
hücreler üstlenmektedir. Aynı şekilde,
yapay sinir ağları da küçük zararları
karşılayabilecek şekilde tasarlanabilmekte veya büyük zararlar karşısında yapay sinir ağı
tekrar eğitilebilmektedir (Chen and Billings, 1992).
YSA’lar, biyolojik sinir sisteminin taklit edilmesiyle, oluşturulmuş yapay sinir
sistemleridir. Biyolojik sinir sistemleri ile yapay sinir sisteminin benzerlikleri Tablo 3.1’de
verilmiştir.
YSA’nın temel işlemci elemanının doğrusal bir yapıda olmaması, bu işlemci
elemanların birleştirilmesi ile oluşturulan YSA yapısının doğrusal olmayan karmaşık
problemlerin çözümünde de etkili sonuçlar üretebilmesini sağlayan bir özelliktir.
33
Tablo 3.1. Biyolojik sinir sistemi ile YSA’ların karşılaştırılması
Biyolojik Sinir Sistemi
Nöron
Dentrit
Hücre Gövdesi
Aksonlar
Sinapslar
Yapay Sinir Sistemi
İşlemci Eleman
Toplama Fonksiyonu
Transfer Fonksiyonu
Yapay Nöron Çıkışı
Ağırlıklar
Eğer bir sistemin fiziksel kuralları biliniyorsa, bu kuralları kullanarak elde edilen
modele “white-box” (beyaz kutu) modeli denir. Bu durumun dışında kalan modellemeye
ise “black-box” (kara kutu) modelleme denir (Juditsky et. al., 1995).
YSA’ların arzu edilen davranışı sergileyebilmesi için problemin yapısına göre
tanımlanması gerekmektedir. Temel fikrini aldıkları biyolojik sinir sistemine paralel olarak
oluşturulan YSA’ların karmaşık yapısı, bağlantıların ve ağırlık değerlerinin önceden
belirlenmesini engellemektedir. Bu nedenle YSA, istenen davranışı gösterecek şekilde
ilgilenilen
problemden
alınan
eğitim
örneklerini
kullanarak
öğrenme
işlemini
gerçekleştirmek zorundadır. Bu öğrenme işlemi genel olarak tamamen bağlantı ve ağırlık
değerlerinin ayarlanması şeklinde gerçekleşmektedir. Böylece YSA’lar problemlere farklı
çözümler sunabilen bir yapıya sahip olan ağ yapılarıdır.
Bu terminolojik benzerliklerle farklı yetenekleri de kazanan çok sayıda hücrenin
çeşitli şekillerde birbirlerine bağlanması ile oluşan YSA modelleri paralel dağılmış bir
yapıya sahip olurlar. Bu ağ yapısının sahip olduğu bilgi, ağdaki bütün bağlantılar üzerine
dağıtılmıştır. Böylece öğrenme işlemini gerçekleştirmiş olan bir YSA modeli biyolojik
sinir sistemine benzer olarak herhangi bir bağlantının zarar görmesi hatta bazı bağlantı
elemanlarının bozulması durumunda bile doğru bilgi üretebilecek bir yapıya sahip olur. Bu
nedenle, geleneksel yöntemlere göre hatayı tolere etme yetenekleri son derece yüksektir
(Bossley, 1997).
Endüstriyel uygulamaların büyük çoğunluğu, doğrusal olmayan dinamik
sistemlerdir. Bu nedenle, böyle sistemlerin modellenmesi fazla karmaşık olmaktadır. Bazı
34
araştırmacılar, doğrusal olmayan dinamik sistemlerin modellenmesi işleminde yapay sinir
ağlarını (YSA) kullanarak iyi bir yaklaşım sağlamışlardır. Fakat yapay sinir ağının
eğitilmesi ile elde edilen kara-kutu modeli sonuçlarının yorumlanması çok zor olmaktadır.
Buna ek olarak, sınırlı eğitim bilgisi kullanıldığında sistem çıkışında tutarsız veya anlamsız
bilgi alınmaktadır (Zhang and Morris, 1995).
YSA
birçok
alanda
kullanılmaktadır.
Özellikle
matematik
modelleri
oluşturulamayan veya matematik modelleri çok zor tanımlanabilen problemlerin çözümü
için kullanılmaktadır. Giriş ve çıkış eğitim çiftleri verilen bir fonksiyonu, yapay sinir ağı
öğrenebilmektedir.
Öğrenme
işlemi,
ağ
içerisindeki
ağırlıkların
belirlenmesiyle
gerçekleşmekte ve verilen fonksiyona optimal yaklaşım sağlanmaktadır. Böylece yapay
sinir ağları, sistemi öğrenmektedir.
YSA teknolojisi havacılık ve uzay alanında yüksek performanslı otomatik pilot
geliştirme çalışmalarında, uçuş kontrol sistemlerinde ve simülasyon cihazlarında
kullanılmaktadır. YSA’lar ayrıca otomotiv sektöründe oto-rehberlik uygulamalarını
geliştirmekte de kullanılmaktadırlar. Bankacılık alanında ise YSA’ları, kredi risk
analizlerinde, kontrol ve döküman okuma uygulamalarında kullanılmaktadır. Savunma
alanında YSA’lardan, hedef tanıma ve izleme, silah oryantasyonu, veri kodlama ve
sıkıştırma, sayısal görüntü işleme gibi birçok alanda faydalanılmaktadır. Meteorolojik
tahminlerde de yaygın olarak kullanılmaya başlanılan YSA’lar elektronikte bilgisayar
destekli görme, ses anlama, görüntü ve işaret işleme ve filtreleme alanlarında da
kullanılmaktadırlar. Ayrıca eğlence ve finans sektörünün yanı sıra sigortacılık, robotik, tıp,
haberleşme ve diğer birçok alanda YSA’lardan yaygın olarak faydalanılmaktadır (Frye et
al., 1992).
3.1. Yapay Sinir Ağlarının Genel Özellikleri
Genel anlamda YSA’lar, biyolojik sinir sisteminin işlevi taklit edilerek insan
beyninin modellenmesi için tasarlanmış sistemlerdir. Yapay sinir hücrelerinin birbirleri ile
35
çeşitli şekillerde bağlanmalarından oluşan ağ yapısı genellikle katmanlar şeklinde
düzenlenir. İnsan beyninin bilgi işleme yöntemine uygun olarak YSA’lar, bir öğrenme
sürecinden sonra bilgiyi toplama, hücreler arasındaki bağlantı şekilleri ve ağırlıkları ile bu
bilgiyi saklama ve genelleme yapabilme yeteneğine sahip paralel dağılmış bir işlemcidir.
YSA’lar, insan beyninin çalışma prensibi örnek alınarak geliştirilmeye çalışılmış ve
aralarında Tablo 3.1’de de verilmekte olan yapısal benzerliklere sahip bir tekniktir. Bu
benzerlikleri ile YSA’lar karmaşık problemleri çözebilme yeteneğine sahip olmaktadırlar.
YSA’ların hesaplama özelliklerini, paralel dağılmış yapılarından ve öğrenme ve genelleme
yapabilme özelliklerinden aldığı söylenebilir. Genelleme yapabilme özellikleri bilinen
durumlardan
bilinmeyen
durumlar
içinde
çözümler
sunabilme
özelliği
olarak
tanımlanabilir. YSA’ları doğrusal olmayan yapıları, öğrenme ve genelleme yapabilme
kabiliyetleri,
hataya
karşı
toleranslı
davranabilme
yetenekleri,
paralel
işlem
yapabilmelerinden kaynaklanan hızlı ve doğru çözümler sunabilmeleri, donanım olarak
gerçekleştirilebilmeleri, adaptasyon kabiliyetleri ve piyasada hazır birçok yazılım
bulunması nedeniyle çok farklı mühendislik alanında başarıyla uygulanmaktadır (Faussett,
1994).
YSA’ların en küçük bilgi işleme elemanı olan yapay nöron, Şekil 3.2’de
verilmektedir. Şekilden de görülebileceği gibi bir yapay nöron, girişler, ağırlıklar,
birleştirme fonksiyonu, transfer fonksiyonu ve çıkış bileşenlerinden oluşmaktadır. Girişler,
diğer sinir hücrelerinden yada dış bağlantılar üzerindeki ağırlıklardan hücreye giren
verilerdir. Birleştirme fonksiyonu, yapay nörona gelen net girişin, girişlerin ilgili
ağırlıklarla çarpılarak toplanmasıdır. Birleştirme fonksiyonu ile elde edilen net girişin bir
işlemden geçirilerek nöron çıkışını belirleyen ve genellikle doğrusal olmayan fonksiyon
ise transfer fonksiyonu olarak bilinmektedir (Rauf, 1992).
36
Girişler
…
p2
θi
Ağırlıklar
W11
W12
Transfer
Fonk.
∑ y=Σp w
i
y
f
Çıkış=f(y)
ij
…
p1
Bias
Wij
pi
Şekil 3.2. Yapay nöron
YSA modeline verilen giriş değerlerine önce toplama fonksiyonları uygulanır ve
her bir nöronun çıkış değeri;
y = ∑ pi wij − Bias
(3.1)
ile bulunur. Burada pi , i’inci girişi, wij , j’inci elemana bağlantı ağırlığını ve θ i Bias eşik
değerini göstermektedir. Daha sonra bu y değerleri bir transfer fonksiyonuna uygulanır.
Burada sigmoid fonksiyonu kullanıldığı kabul edilirse çıkış değeri Ç;
Ç = f ( y) =
1
1 + e−y
(3.2)
şeklinde elde edilir.
3.2. Transfer Fonksiyonları
YSA nöronları; transfer fonksiyonu adı verilen fonksiyonlar içerirler. Gradyan
azaltımında kullanılan asıl fonksiyonlar transfer fonksiyonlarıdır. YSA’da en sık kullanılan
transfer fonksiyonlarına ait grafikler Şekil 3.3’te gösterilmiştir. Doğrusal olmayan transfer
fonksiyonlarının da kullanılması ile yapay sinir ağları daha karmaşık problemlere
uygulanmaya başlanmıştır (Kosko, 1992). Transfer fonksiyonları öğrenme eğrisi olarak da
37
adlandırılmaktadır.
Tablo
3.2’de
YSA’da
en
çok
kullanılmakta
olan
transfer
fonksiyonlarının matematik ifadeleri verilmiştir.
Logaritmik
Sigmoid
Doğrusal
Hiperbolik
Sigmoid
Keskin
Sınırlayıcı
Şekil 3.3. YSA’larda en çok kullanılmakta olan transfer fonksiyonları
Tablo 3.2. Bazı transfer fonksiyonlarının matematik ifadeleri
Fonksiyon tipi
Matematik İfadesi
Doğrusal
X
Logaritmik-Sigmoid
1
1 + e −x
RBF–Cauchy
(1 + X )−1
RBF–Ters
Multiquadratik
RBF–Gaussian
(1 + X )0.5
Hiperbolik Tanjant
Keskin Sınırlayıcı
− x2
2
eβ
1 − e −2 x
1 + e −2 x
1
0
x ≥ x0
(
di g er
Transfer fonksiyonları türevleri tanımlanabilir, sürekli fonksiyonlar olmalıdırlar.
38
3.3. YSA’ların Özellikleri
YSA’ların en önemli özellikleri; öğrenme, genelleme yapabilme, doğrusal
olmama, gürültüyü yayabildiklerinden gürültüye karşı tolerans, paralel işlem yapabilme,
donanım olarak gerçekleştirilebilme ve uyarlanabilirliliktir (Lee and Mathews, 1994).
3.3.1 Doğrusal Olmama
YSA’nın temel işlem elemanı olan nöron doğrusal olmak zorunda değildir. Bu
durumda, hücrelerin birleşmesinden meydana gelen YSA’da doğrusal olmayacaktır. Bu
yüzden, YSA doğrusal olmayan karmaşık problemlere kolayca çözüm getirebilmektedir.
3.3.2 Öğrenme
Bir sistemin girişi ve çıkışı arasındaki ilişkiyi en iyi tanımlayacak olan YSA
ağırlıklarının bulunması işlemine öğrenme denir. Bu işlemde YSA yapısı üzerindeki
ağırlıkların bir öğrenme algoritması kullanılmasıyla, istenilen bağıntıyı öğrenmesi sağlanır.
Bu nedenle YSA, istenen davranışı gösterecek şekilde ilişkilendirmek istenen sistemin
uygun örnek giriş ve çıkışlarından faydalanılarak gerçekleştirilir.
3.3.3 Genelleme Yapabilme
YSA’lar bir problemi öğrendikten sonra eğitimde kullanılmayan test verileri
içinde beklenen veya istenilen tepkiyi üretme kabiliyetine sahiptir. Nöral hesaplamada
hafızalar birleşiktir. Yani eğitilmiş ağa giriş örneğinin bir kısmı verilse bile, ağ hafızadan
bu girişe en yakınını seçerek uygun çıkış değeri üretir. YSA’ya bozuk veya eksik bir bilgi
39
verilse bile ağ kabul edilebilir en uygun çıkışı verecektir. Burada temel özellik az veriyle
sistem davranışının veya ilişkisinin öğrenilmesidir.
3.3.4 Uyarlanabilirlik
YSA’nın ağırlıkları, problemden probleme değişmektedir. Yani bir problemde iyi
çıkışlar veren ağırlıklar diğer bir problem için iyi çıkışlar vermeyebilir. YSA’lar
problemlerdeki değişmelere göre farklı şekilde eğitilebilirler. Bu özellik YSA’lar ile hedef
tanıma ve izleme, uyarlamalı örnek tanıma, sınıflandırma, görüntü ve sinyal işleme,
otomatik sistem kimliklendirme ve kontrol gibi alanlarda kullanım kolaylığı sağlamaktadır.
3.3.5 Donanım Olarak Gerçekleştirilebilme
YSA’lar paralel işlem yapabilme yetenekleri nedeni ile büyük ölçekli entegre
devre (VLSI-Very Large Scale Integration) teknolojisiyle tarafından desteklenmektedirler.
Bu özellikleri ile de YSA’lar en ileri düzeydeki veri işleme teknolojileri arasındadır. Bu
nedenle hızlı işlem yapabilme kabiliyetine sahiptirler.
3.3.6 Hataya Karşı Duyarlılık
YSA çok sayıda işlemci elemandan oluşmuştur. Bu elemanlar arası bağlantılar
paralel dağıtılmış bir yapıya sahiptir. Ağın sahip olduğu bilgi, ağdaki bütün bağlantılara
dağıtılmıştır. Giriş veri setinde bulunabilecek herhangi bir gürültü, bütün ağırlıklar üzerine
dağıtıldığından dolayı, gürültü etkisi tolere edilebilir. Geleneksel yöntemlere göre hatayı
tolere etme yetenekleri daha fazladır.
40
3.3.7 Veri İşleme
Biyolojik sistemlerde veri dağınık yapıda saklanır. Yapay sinir ağlarında ise
veriler ağırlıklar üzerine dağıtılmıştır. Ağırlıklar herhangi bir anda YSA'nın problemiyle
ilgili olarak sahip bulunduğu bilgiyi ifade eder. Yapay sinir ağlarında veri ağırlıklar
üzerine paralel olarak dağıtılmış şekilde temsil edilmekte, korunmakta ve işlenmektedir.
YSA'larda dağıtılmış birleşik hafıza yapısı kullanılır (Lee and Mathews, 1994).
3.4. YSA’ların Sınıflandırılması
YSA’lar işlemci eleman olarak adlandırılan nöronlardan ve ağ bağlantılarından
oluşmaktadırlar. Bu nedenle ağ bağlantı şekillerine, öğrenme kuralları ve transfer
fonksiyonlarına göre belirlenen bu YSA modellerini yapılarına ve öğrenme algoritmalarına
bağlı olarak sınıflandırmak mümkündür.
3.4.1 YSA’ların Ağ Yapılarına Göre Sınıflandırılması
YSA’lar mimari yapılarına göre ileri beslemeli (feed-forward) ve geri beslemeli
(feed-back) ağlar olarak ikiye ayrılabilir (Nauck et al., 1992). Bu yapılar aşağıdaki
kısımlarda açıklanmıştır.
3.4.1.1 İleri Beslemeli Ağ Yapısı
İleri beslemeli bir ağda işlemci elemanlar katmanlar üzerinde bulunur. Giriş
katmanı, dış ortamdan aldığı bilgileri hiçbir değişiklik yapmadan ara katmandaki işlemci
elemanlara iletir. Bilgi, ara katman veya katmanlarla çıkış katmanında işlenerek ağ çıkışına
iletilir. Girişler tek yönlü olarak çıkışa doğru iletilirken, her bir katman çıkışı diğer
katmana giriş olarak uygulanmaktadır. Herhangi bir andaki çıkış değeri, sadece o andaki
41
girişin fonksiyonu şeklinde ortaya çıkmaktadır. Böylece bu ağ yapısı, statik yapılı bir
hafızaya sahip olur.
İleri beslemeli ağlar doğrusal olmayan yapıya sahip olup çok katmanlı
perseptronlar (ÇKP), LVQ (Learning Vector Quantization-Nicemleme Öğrenme Vektörü)
ağ yapıları bunlara örnek olabilir. ÇKP yapısının eğitilmesinde en çok kullanılan öğrenme
algoritması geri yayılım algoritmasıdır. İleri beslemeli YSA yapısı Şekil 3.4’te verilmiştir.
Şekil 3.4. İleri beslemeli YSA yapısı
3.4.1.2 Geri Beslemeli Ağ Yapısı
Geri beslemeli bir sinir ağı, en az bir işlemci eleman çıkışının kendisine veya
diğer işlemci elemanlara bir gecikme elemanı üzerinden giriş olarak uygulanması ile elde
edilen ağ yapısıdır. Geri besleme, bir katmandaki işlemciler arasında olduğu gibi katmanlar
arasındaki işlemciler arasında da gerçekleştirilebilmektedir. Geri beslemeli YSA yapıları,
doğrusal olmayan dinamik bir davranış gösterirler ve herhangi andaki çıkış değeri hem o
andaki hem de daha önceki giriş değerlerine sahiptirler. Dinamik yapılarından dolayı geri
beslemeli YSA’lar tahmin uygulamalarında başarılı bir şekilde kullanılmaktadırlar. Şekil
3.5’te geri beslemeli bir YSA yapısı verilmiştir.
42
Şekil 3.5. Geri beslemeli YSA yapısı
3.4.2 Yapay Sinir Ağı Yapıları
Literatürde çok sayıda YSA ağ yapısı bulunmaktadır. Bunlara, ÇKP’ler, LVQ’lar,
Elman ve Jordan Ağları, Radyal Tabanlı Yapay Sinir Ağı (RTYSA) yapıları örnek olarak
verilebilir. Bu ağlardan en çok kullanılan ÇKP alt bölümde anlatılmıştır.
3.4.2.1 Çok Katmanlı Perseptron YSA Yapısı
Çok katmanlı bir perseptron sinir ağı modeli, Şekil 3.6’da gösterilmiştir. Bu ağ
modeli özellikle mühendislik uygulamalarında en çok kullanılan sinir ağı modeli olmuştur.
Bu modelin yaygın kullanılmasının sebebi, bir çok öğrenme algoritmasının bu ağın
eğitiminde kolaylıkla kullanılabilmesidir. Bir ÇKP modeli, bir giriş, bir veya daha fazla ara
kat ve birde çıkış katından oluşur. Bir katmandaki bütün işlem elemanları bir üst
katmandaki bütün işlem elemanlarına bağlıdır. Bilgi akışı ileri doğru olup geri besleme
yoktur. Bu yüzden bu ağ yapısı ileri beslemeli sinir ağı modeli olarak adlandırılır. Giriş
katmanında herhangi bir bilgi işleme yapılmaz. Ara katman sayısı ve ara katmanlardaki
işlem elemanı sayısı genellikle deneme yanılma yoluyla bulunur. Çıkış katmanındaki
eleman sayısı yine uygulanan probleme bağlı olarak belirlenebilir. ÇKP ağlarında, ağa bir
örnek gösterilir ve örnek neticesinde nasıl bir sonuç türeteceği de bildirilir. Örnekler giriş
katmanına uygulanır, ara katmanlarda işlenir ve arzu edilen çıkış arasındaki hata tekrar geri
doğru ağırlıklar üzerine yayılarak hata minimuma düşünceye kadar ağırlıklar değiştirilir.
43
ÇKP ağı ileri beslemeli ağ olup, en genel sonuç çıkış katmanından elde edilir. Kullanılan
eğitme algoritmasına göre ağın çıkışı ile giriş ve çıkış uzayı arasında statik haritalama
yaparlar, bir andaki çıkış sadece o andaki girişin bir fonksiyonu olabilir (Demuth et
al.,1999).
Şekil 3.6. Genel bir ÇKP Yapısı
3.4.3 YSA’ların Öğrenme Algoritmalarına Göre Sınıflandırılması
Öğrenme; gözlem ve eğitim sonucu oluşan hareketin doğal yapıda meydana
getirdiği davranış değişikliği olarak tanımlanabilir. Bu tanıma göre, YSA’larında öğrenme
yani gözlem ve eğitim sonucu oluşan davranış değişiklikleri, bir takım metot ve kurallar
yardımıyla ağırlıkların değiştirilmesiyle sağlanabilir. Öğrenme sırasında, ağın uyarılması
sonucunda ağırlıklarında uyarılması ve ağın problemi çözmeye yönelik yeni tepkiler
vermesi gerekir.
Literatürde, YSA yapılarına göre farklılık gösteren ve aşağıdaki bölümlerde
kısaca anlatılan çok sayıda öğrenme algoritması mevcuttur. Bunlardan bazıları şunlardır:
44
1) Momentumlu Geri Yayılım (BPM-Back Propagation Momentum)
2) Esnek Geri Yayılım (BPR-Back Resillient Propagation)
3) Eşleştirmeli Gradyan Azaltma Geri Yayılım (CG-Conjugate Gradien)
4) Quasi-Newton (QN)
5) Delta-Bar-Delta (DBD)
6) Genişletilmiş Delta-Bar-Delta (EDBD-Extended Delta-Bar-Delta)
7) Levenberg Marquardt (LM)
8) Bayesian Düzenlileştirme (BD) Öğrenme Algoritması
Bu algoritmaların dışında daha pek çok öğrenme algoritması vardır.
Çalışmamızda ANFIS kullanıldığından Dereceli Azaltılmış Geri Yayılım (BPGD- Back
Propagation Gradient Descent) öğrenme algoritması anlatılacaktır.
3.4.3.1 Dereceli Azaltılmış Geri Yayılım (BPGD- Back Propagation Gradient
Descent)
Bir çok uygulamada yaygın bir şekilde kullanılmakta olan bir öğrenme
algoritmasıdır. Anlaşılması ve matematik olarak kolayca ispatlanabilir olmasından dolayı
tercih edilmektedir. Geri yayılım algoritması, YSA’lar açısından en önemli tarihsel
gelişmelerden biridir. Geri yayılım algoritması veya bir başka adıyla Genelleştirilmiş Delta
Algoritması uygulamada en çok kullanılan öğretme algoritmasıdır. Hata, ağdaki
ağırlıkların bir fonksiyonu olarak görülür ve hataların kareleri ortalaması delta kuralında
olduğu gibi dereceli azaltma (gradient descent) yöntemi kullanılarak, minimize edilmeye
çalışılır. Bu algoritma, hataları çıkıştan girişe geriye doğru azaltmaya çalışmasından dolayı
geri yayılım ismini almıştır. Geri yayılım algoritması, ÇKP’ları eğitmede en çok kullanılan
temel bir öğrenme algoritmasıdır.
Bu algoritmayla, i ve j katman nöronları arasındaki ağırlık ifadesi olan ∆wji(k)
değişikliği hesaplanır. Bu ifade,
45
(3.3)
∆w ji (k ) = ηδ j xi
olarak verilir. Bu eşitlik η öğrenme katsayısı, δ j ara veya çıkış katmanındaki herhangi bir
j nöronuna ait bir faktördür. Çıkış katmanı için bu faktör aşağıdaki şekilde verilir.
δj =
∂f
y kj − y j
∂net j
(
)
(3.4)
Burada net j ≡ Σxi w ji ve y kj ise j nöronunun hedef çıkışıdır. Ara katmanlardaki
nöronlar için bu faktör,
∂f
δj =
∂net
j
Σwqj δ q
(3.5)
olarak verilir. Ara katmanlardaki nöronlar için herhangi bir hedef çıkış olmadığından
eşitlik 3.4 yerine eşitlik 3.5 kullanılır. Bu duruma bağlı olarak, çıkış katmanından
başlayarak δ j faktörü, bütün katmanlardaki nöronlar için hesaplanır. Tüm ağırlıklar eşitlik
3.3’e bağlı olarak güncelleştirilir.
3.5 ANFIS Ağında Kullanılan Hibrid Öğrenme Algoritması
Kimliklendirmede kullanılan ANFIS ağına ait parametrelerin güncellenmesinde,
iki aşamalı bir ögrenme algoritması olan, hibrid ögrenme algoritması kullanılmıştır. Hibrid
ögrenme algoritmasında, ANFIS ağ yapısına ait parametreler, giriş ve çıkış parametreleri
olarak iki kısımda ele alınır. Toplam parametre kümesi; S = S1 + S2 şeklinde ifade edilecek
olursa, S1 giriş parametrelerine, S2 de çıkış parametrelerine karşılık gelir. Hibrid
algoritmanın ilk aşaması yada ileri yön geçişi ile ANFIS ağına ait giriş parametreleri, ikinci
aşamada yada geri yön geçişinde ise ağın sonuç parametreleri güncellenir. Hibrid ögrenme
algoritmasının ileri yön geçişini oluşturan ve en küçük kareler tahmini (LSE) yöntemi
kullanılmak suretiyle gerçekleştirilen kısmında, ağın girişindeki üyelik fonksiyonlarına ait
46
parametreler yada kısaca S1 ile belirtilen giriş parametreleri sabit tutulur. Böylece ağın
çıkışı, S2 parametre kümesi içinde bulunan çıkış parametrelerinin, lineer bir kombinasyonu
haline gelir. Modellenecek sisteme ait P tane giriş-çıkış verisi yada egitim datası ile S1 giriş
parametrelerinin verilen degerleri kullanılarak, ağın çıkışı, matrisel formda,
(3.6)
Aθ = B
şeklinde ifade edilebilir. Matrisel eşitlikte yer alan θ vektörü, S2 çıkış parametrelerinin
elemanlarından oluşan, bilinmeyen vektördür. Bu denklem, standart lineer en küçükkareler (least-squares) problemini gösterir ve θ
için en iyi çözüm,
Aθ − B
2
nın
minimum degeri olan, en küçük kareler tahmini (LSE) θ ∗ dır.
(
θ ∗ = AT A
)
−1
AT B
(3.7)
(
Burada AT , A matrisinin transpozu ise ve eğer AT A singuler değilse, AT A
)
−1
AT , A ’nın
sahte inversidir. Bunun yerine, yinelemeli olarak (LSE) formülü de kullanılabilir. Özel
olarak eşitlik 3.6’daki A matrisinin i . Satırı aiT ile B matrisinin i . elemanı biT ile
gösterilsin. Bu taktirde θ vektörü, iteratif olarak aşağıdaki gibi hesaplanabilir.
(
θ i +1 = θ i + S i +1ai +1 biT+1 − aiT+1θ i
S i +1 = S i −
S i ai +1aiT+1
1 + aiT+1 S i ai +1
)
, i = 0,1,..., P − 1
(3.8)
(3.9)
Burada en küçük kareler tahmini θ ∗ , θ p ’ye eşittir. 3.8 eşitliğinde ihtiyaç duyulan
başlangıç şartları şunlardır; θ 0 = 0 ve S 0 = γI . Burada γ , pozitif büyük bir sayı, I ise
MxM boyutunda birim matristir.
Hibrid öğrenme algoritmasının geri yön geçişinde, S2 çıkış parametreleri sabit
tutulur ve ağın çıkışındaki hata sinyali geriye dogru yayılarak, eğim düşümü (gradient
47
descent) yöntemiyle giriş parametreleri güncellenir. Geri yön geçişinde giriş parametreleri
için güncelleme formülü aşagıdaki gibidir;
∆α = −η
∂E
∂α
(3.10)
Burada α herhangi bir giriş parametresini, η öğrenme oranını, E ise ağın çıkışındaki hata
değerini göstermektedir
Geri yayılımlı algoritmasında ağın çıkışından elde edilen hata değeri giriş
katmanına kadar geriye doğru yansıtılarak gerekli ağırlık değişkenlerinin ayarlanması
gerçekleştirilir. Amaç E hata ölçütünü öğrenme işlemi sonunda bütün giriş örnekleri için
sıfıra götürmektir. Ağın çıkışında hata, istenen değer d ile gerçek çıkış f arasındaki
farktır ve eşitlik 3.11’deki şekilde ifade edilir,
e=d− f
(3.11)
Bu hata değerine en küçük kareler yöntemi uygulanarak hata ölçütü E aşağıda
verildiği gibi hesaplanır.
E=
1 2
e
2
(3.12)
Hata ölçütü kullanılarak hata geriye doğru katmanlara yansıtılır.
3.6. Sistem Modellemede Yapay Sinir Ağlarının Kullanımı
Adaptif modelleme düşük donanım maliyeti, yakınsak olması, hata analizinin
yapılabilmesi gibi özelliklerinden dolayı en fazla kullanılan yöntemlerdendir. Fakat
doğrusal olmayan özelliklere sahip ortamlarda ve zamanla değişen doğrusal sistemlerde,
bu tür yöntemlerin performansları oldukça düşmektedir. Yapay zeka tekniklerinden olan
48
yapay sinir ağları evrensel yaklaşım (universal approximation) yeteneği, bu ihtiyaca cevap
verebilecek niteliktedir. Ayrıca sistem modellemede, model yapısının bilinmesine ihtiyaç
yoktur. YSA’nın öğrenme özelliğini kullanarak girişlere karşılık çıkışlar verilir ve bunun
YSA tarafından öğrenilmesiyle sistem modellenir. YSA ile sistem modelleme farklı birçok
alana uygulanmıştır (Abıyev, 2003).
YSA'lar insan beyninin çalışma prensibi örnek alınarak geliştirilmeye
çalışılmıştır. Yapısal olarak benzerlikler gösterirler. YSA'larının öğrenme özelliği
araştırmacıların dikkatini çeken en önemli özelliklerinden biridir. Çünkü bir olay hakkında
giriş ve çıkışlar arasındaki ilişkiyi, doğrusal olsun veya olmasın, elde bulunan mevcut
örneklerden öğrenerek daha önce hiç görülmemiş olayları, önceki örneklerden çağrışım
yaparak ilgili olaya çözümler üretebilme özelliği, YSA'larındaki zeki davranışın temelidir
(Giannakis and Mendel, 1989).
Yapısı ve öğrenme yöntemleri dikkate alındığında sinir ağları ile adaptif sistemler
arasında birçok ortak nokta vardır. Her iki yapıda da temel olarak adaptif doğrusal
birleştirme özelliği yer alır. Bu ortak noktalarının ve genel bir öğrenme yeteneğinin olması
sinir ağlarının işaret işleme ve modellemede başarılı bir şekilde kullanılmasını sağlamıştır.
49
4.BULANIK SİNİR AĞI
4.1. Bulanık Mantık
Gerçek hayat karmaşıktır; yaşamdaki karmaşıklık genellikle belirsizliğin
formunda olan kesinsizlikten ortaya çıkar. Karmaşık ve belirsiz özellikli problemler,
insanların düşünebildiğinden beri, insanlar tarafından bilinçsizce çözülmektedir. Dr.
Zadeh’in birbirine uymayan önerilerinin prensibine göre, karmaşıklık ve belirsizlik
ilişkisini, “Bir kişi gerçek yaşamdaki bir problemi ne kadar yakından incelerse, problemin
çözümü o kadar bulanıklaşır” şeklinde belirtmiştir (Zadeh, 1962).
Klasik mantığın birçok alanda yetersiz hale gelmesi, insan zekasının işleyişine
uygun olmaması sonucu bulanık mantık kavramı popüler hale gelmiştir. Bulanık mantık
üyelik derecelerini temel almış, ikili mantığın aksine çok değerli, matematik bir disiplindir.
Bulanık mantık, yanlış veya doğru olma durumlarından çok, doğru olma durumunun
olasılıklarına dayanır. Ayrıca, bulanık mantık uygulaması, matematik modele ihtiyaç
duymamaktadır (Ross, 1995)
4.1.1 Bulanık Mantık Gelişim Süreci
Bulanık mantık, 1965 yılında Lütfi Zadeh’in California Berkeley Üniversitesi’nde
“Bulanık Kümeler” adlı makalesini “Information and Control” adlı dergide yayınlamasıyla
başlamıştır. Bu çalışma basılmasından iki yıl önce yazılmasına rağmen radikal
fikirlerinden dolayı hiçbir teknik dergi yayınlamayı kabul etmemiştir. Zadeh daha sonraları
bulanık mantık ve düşünüşün temelini oluşturan Bulanık Algoritması’nı ileri sürmüştür.
1972 yılında Michio Sugeno bulanık ölçüm ve integral kavramlarıyla bulanık konusuna
yeni bakış açıları getirmiştir. 1974 yılında, Ebraham Mamdani bulanık mantığı ilk kez bir
buhar makinesinin kontrol aşamasında kullanmıştır
50
Bulanık mantık kuramının ilk önemli endüstriyel uygulaması, 1980 yılında
Danimarka’daki bir çimento fabrikasında gerçekleştirilmiştir. Değirmen içinde çok hassas
bir denge ile oranlanması gereken sıcaklık ve oksijen ayarı en uygun biçimde ayarlanmıştır
(Eksin andErol, 2000) .
1980 yılında F.H. Smidth Japon Fuji Elektrik firmasında su arıtma sistemlerinin
kontrolünde bulanık mantığı kullanmıştır. Sonrasında bir Japon firması olan Hitachi (1987)
otomatik tren bulanık kontrol sistemini geliştirmiştir. Bunlar 1990’lı yılların ilk yarısında
Japonya’da yayılacak olan bulanık mantığın ilk öncüleri sayılmıştır (Taneva and
Georgieva, 2003) .
4.1.2. Klasik ve Bulanık Mantık Arasındaki Fark
Karmaşık sistemler bulanık mantık teknikleri ile, “0” ve “1” değerlerinden oluşan
ikili mantıktan daha iyi açıklanabilir.
Klasik mantık kavramında herhangi bir nesne bir kümeye ya aittir, ya da değildir.
Yalnızca “0” veya “1” değerlerine sahiptir. Bunun ortası söz konusu değildir. İki değerli
klasik mantığın aksine bulanık mantıkta elemanlar bulanık kümeye kısmen aittir ve “0” ile
“1” arasındaki değerler de kullanılmaktadır.
Aşağıda Şekil 4.1’de ikili (klasik) mantık ve bulanık mantık farkı şematik olarak
gösterilmiştir. Görüldüğü gibi ikili mantıkta ara değer yoktur oysa bulanık mantıkta ara
değerler söz konusudur.
Şekil 4.1. Klasik ve Bulanık Mantık Arasındaki Farkı
51
Bulanık kümelere dayalı olan bulanık mantık genelde, insan düşüncesine özdeş
işlemlerin gerçekleşmesini sağlamakla, gerçek dünyada sık sık meydana gelen belirsiz ve
kesin olmayan verileri modellemede yardımcı olur. Klasik küme teorisinde kesin hatlar
vardır ya doğru yada yanlış. Bulanık küme teorisi ise az, sık, orta, düşük, birçok, gibi
dilbilimsel yapıları kullanarak dereceli veri modellemesi gerçekleştirmektedir. Kurallar,
bulanık sistemin davranışını tanımladığından, bulanık kümeler kendi içerisinde
öğrenmektedir. Bulanık küme, kesin geçişleri elimine ederek belirsizlik kavramının
tanımını yeniden verir ve evrendeki bütün bireylere üyelik derecesi değerini atayarak
matematik olarak tanımlar. Bulanık kümede her bir elemanın kümeye üyelik derecesini
veren üyelik fonksiyonu vardır. Bulanık kümede üç tip üyelik fonksiyonu vardır; üçgen,
yamuk ve parabolik üyelik derecesinin değeri sıfır ile bir arasındadır.
Bulanık mantık kullanılarak modelleme yapılırken konu hakkında tecrübeye sahip
bir bilirkişi bulunmalıdır.
4.1.3. Bulanık Mantık Uygulama Alanları
Bulanık
mantığın
uygulama
alanları
denetim
sistemlerinin
de
ötesine
uzanmaktadır. Bulanık mantık, Fizik, Biyoloji, Mühendislik, İşletme gibi birçok alanda
sürekli sistemleri modellemek üzere kullanılabilmektedir. Çoğu alanda, bulanık mantıklı
modellerin matematik modellerden çok daha iyi sonuçlar verdiği görülmüştür.
Japonya’da bir metro sisteminde kullanılan bulanık mantık çok başarılı olmuştur.
1990’lı yıllarda bulanık mantık, fotoğraf makinesinden ev aletlerine kadar çok değişik
alanlarda kullanılmıştır. Bulanık çamaşır makinesinin değişmez komutlarla çalışan “aptal”
bir makineden daha temiz yıkadığı görülmüştür. Araba fren-vites sistemlerinde, hatta borsa
gibi birçok farklı sektörde bulanık mantık uygulamaları mevcuttur (Jogle, 2004).
52
4.2. Bulanık Küme Teorisi
Bulanık mantık doğal lisandaki belirsizliği temsil etmek için kullanılmaktadır.
Belirsizliği tanımlamak amacıyla, Zadeh bulanık küme kabulünü açıklamıştır. Bulanık
kümeler, nesnelerin uzunluk, kısalık, soğukluk, parlaklık v.b. gibi göreceli sıfatlarını
tanımlamakta kullanılmaktadır. Klasik kümelerde bir elemanın, belirli bir kümeye olan
üyeliği kesin şekilde belirlenmektedir. Eleman, kümenin ya üyesidir ya da değildir. Oysa
ki, bulanık kümelerde, bir elemanın kümeye olan üyeliği aşamalıdır. Bulanık küme
sınırları, klasik küme sınırları gibi kesin bir çizgi ile ayrılmamaktadır .
li ≤ a
0,
f (li ) = 1 (b − a ), a < l i < b
0,
b ≤ li
(4.1)
Bu model, veriler arasındaki ilişkilerin sistemidir. Bu verilerin bazıları kesindir,
bazıları rastgeledir, bazıları ise belirsizdir. Kesin veya/ve rastgele verilerin kullanıldığı
modeller iyi bilinmektedir ve uzun zamandır kullanılmaktadır. Bilim adamları belirsiz
veriyi buldukları zaman, Laplace kuralı veya bazen bir Bayes işlemi gibi olasılık yasalarını
kullanarak, belirsizliği tesadüfiliğe dönüştürmeye çalışmışlardır. Tesadüfilik, belirsizlikten
farklıdır. Örneğin, L1 ve L2 gibi rastgele iki değişkeni aynı ihtimal yasasında kullandığımızı
varsayalım:
L1 , L2 , a, b ∈ R; i = 1,2 durumunda ve eşitlik 4.2 ile, eşitlik 4.3 elde edilmektedir.
L1 (+ ) L2 = L
(4.2)
0,
l < 2a
( x − 2a ) (b − a )2 , 2a ≤ l ≤ a + b
f (l ) =
2
(− x − 2b ) (b − a ) , a + b ≤ l ≤ 2b
0,
2b ≤ b
(4.3)
53
Böylece f (l ) üçgen yoğunluk kuralı olarak hesaplanabilir. Şimdi, eşit olan
mesafesini inceleyelim:
A1 = [a, b] ve A2 = [a, b] olsun.
A1 (+ ) A2 = [a, b] + [a, b] = [2a,2b]
(4.4)
Toplamları, şeklinde verilir. Eşitlik 4.4’deki gibi kullanılan alt kümeler, kendi karakteristik
fonksiyonları ile tanımlanabilir:
0,
µ Ai ( xi ) = 1,
0,
xi < a
a ≤ xi ≤ b
b ≤ xi
(4.5)
Burada, a, b ∈ R; i = 1,2 olmaktadır ve toplamları aşağıda verilen eşitlik 4.6 ile bulunur:
µ A = µ A1 (+ )µ A 2
0, xi ≤ 2a
= 1, 2a ≤ xi ≤ 2b
0, 2b ≤ x
i
(4.6)
Böylece 2a ve 2b ve 0 arasındaki bir x değeri için,
µ A ( x) = 1
(4.7)
olarak hesaplanmaktadır. Bu örnek, rastgelelik ve belirsizlik arasındaki asıl farkı
açıklamaktadır. İlk durumda, Laplace’dan bir hipotezi kabul edilmektedir. İkinci durumda,
olasılığın bütün kuralları görülmez. Sonuçta, olası ve olası olmayan belirsizlik hakkında
dikkatli olunması gerekmektedir.
Bulanık küme teorisi, olası olmayan belirsizlik ile ilgilidir. Birçok durumda,
modellemede, olasılık teorisinden çok bulanık küme teorisini kullanmak çok daha iyidir
çünkü sonuçlar çok daha gerçekçi çıkmaktadır. Eğer bir modelde bir veri ölçülemiyorsa,
bulanık küme teorisinin ürettiği değer tavsiye edilmektedir (Lin and Cunningham, 1995) .
54
Bulanık küme düşüncesi, bilgisayar sistemleri içerisine belirsizlik, kesinsizlik,
bulanıklık gibi konuları gidermek amacıyla Zadeh tarafından geliştirilmiştir. Küme
sınırlarındaki bulanıklık, bulanık küme teorisinde 0 ve 1 arasında değerleri alabilen bulanık
küme belirsizliğidir. Bu belirsizliğin miktarı üyelik fonksiyonu ile ifade edilir. Klasik
matematikte yer alan kümeler karakteristik fonksiyonlarla tanımlanır. Bulanık kümeler ise
üyelik fonksiyonlarıyla tanımlıdır.
Bulanık kümelerin esası, bir elemanın içinde bulunduğu kümeye ait olma veya
üyelik derecesinin belirlenmesine dayanmaktadır. Zadeh, bulanık kümelerin tanımını
“üyelikten üyeliğe derecelenmiş bir dizinin olduğu bir grup yada takım” olarak yapmıştır
(Nauck, 1995) .
A = {x x = y + 0.1; y ∈ [0 0.9]} şeklinde bir A kümesi olsun. Görüldüğü gibi A
kümesi [0 1] aralığındaki sayıların oluşturduğu bir kümedir. Eğer bir sayı [0 1] aralığında
ise A kümesinin elemanıdır, değilse A kümesinin elemanı değildir. Bu durum aşağıdaki
şekilde ifade edilebilir:
A = {(0.1 1) , (0.2 1) , (0.3 1) ,..., (1 0) , (2 0) , (3 0) , (4 0),...}
A kümesinde sıralanan ikililerden ikinci rakamlar 0 veya 1 olup, eleman olup
olmadığının derecesini göstermektedir. 0.1 rakamının yanında bulunan (1), 0.1 sayısının
A kümesinin elemanı olduğunu belirtmektedir. 1 rakamının yanında bulunan (0), 1
sayısının bu kümenin elemanı olmadığını belirtmektedir.
4.2.1. Klasik ve Bulanık Kümeler
Klasik veya belirgin kümelerde, verilen bir kümede, evrendeki bir elemanın
üyelik veya üyeliği olmayan arasındaki geçişi anidir ve iyi belirlenmiştir ki, buna belirgin
denir. Evrende bulanık küme içeren bir eleman için geçiş kademelidir. Çeşitli üyelik
değerlerine bağlı olan bu geçiş, bulanık kümelerin sınırının muğlak ve belirsiz olması
nedenine bağlanarak düşünülebilir. Böylece, evrendeki bir kümeden bir elemanın
55
belirsizliği ve bulanıklığı bir fonksiyon sayesinde ölçülür.
Bulanık bir küme, böylece, bir kümede değişik üyelik derecelerine sahip
elemanlar içeren kümedir. Bu düşünce klasik veya belirgin kümelerle zıttır çünkü bir
klasik kümenin üyeleri kendi üyelikleri tam olmadıkça klasik kümenin üyesi değildir.
Bulanık bir küme elemanları, üyeliklerinin tam olmasına ihtiyaç duymadıkları için, aynı
zamanda, aynı evrende başka bulanık kümelere üye olabilmektedirler (Ross, 1995) .
4.2.2. Üyelik Fonksiyonu
Kuralları sisteme girmek için ihtiyaç duyduğumuz üyelik fonksiyonu, her girişin
katılımının büyüklüğünün grafik temsilidir. Üyelik fonksiyonu, gerekli her girişle ağırlığı
birleştirmekte, girişler arasındaki fonksiyonel hataları belirlemektedir ve son olarak bir
çıkış cevabı oluşturmaktadır. Kurallar, son çıkış kararının bulanık çıktıdaki etkisini
belirlemek için, faktörleri ağırlıklandırarak, giriş üyelik değerlerini kullanır
Bir üyelik fonksiyonu, 0 ile 1 arasında bir üyelik değerinde giriş uzayındaki her
noktanın nasıl belirleneceğinin ayrıntısıyla planlamasını sağlamaktadır. Bulanık kümenin
her elemanı, küme içerisinde bir üyelik değerine sahiptir ve bulanık A kümesinin
elemanlarının değerleri Şekil 4.2’de gösterildiği gibi 0 ile 1 arasındaki sayılardan oluşur.
üyelik
fonksiyonu
1
A
0
X
Şekil 4.2. A Kümesinin Üyelik Fonksiyonu
56
Bir bulanık küme, kendi aitlik fonksiyonu ile açık olarak temsil edilebilmektedir.
Şekil 4.2.’de görüldüğü gibi, aitlik fonksiyonu 0 ile 1 arasındaki her değeri alabilir. Böyle
bir aitlik fonksiyonu ile “kesinlikle ait” (1) veya “kesinlikle ait değil” (0) arasında istenilen
incelikte ayarlama yapmak mümkündür (Eksin and Erol, 2000).
Bir fiziksel değişkenin üyelik derecesini tanımlamak için kullanılan üyelik
fonksiyonları, dilsel ifadelerden oluşan bir anlam grubudur. Bulanık küme teorisinin
temelini oluşturan üyelik fonksiyonları 0 ile 1 arasında bir üyelik derecesine sahiptir.
Üyelik derecesi, elemanın bulanık kümeyle temsil edilen kavrama ne derece uygun olduğu
veya bulanık kümenin temsil ettiği özellikleri ne dereceye kadar taşıdığını gösterir. Üyelik
fonksiyonu, biçimsel olarak denetlenen sürecin özelliklerine göre değişik şekillerde
olabilir. Üyelik fonksiyonları, genellikle aşağıda Şekil 4.3.’de görülen, üçgen (triangular),
yamuk (trapezoidal), gauss veya çan eğrisi (bell-shaped) biçimlerinde olmaktadır.
En yaygın olarak kullanılan üyelik fonksiyonu üçgen tipidir. Çok daha karmaşık
üyelik fonksiyonları kullanılabilir fakat karmaşıklık arttıkça, daha fazla hesaplama gücü
gerekmektedir.
mf2
mf1
1
1
0.5
0.5
0
0
0
0.5
0.5
0
1
(a) Çan Eğrisi
1
(b) Üçgen
mf3
mf4
1
1
0.5
0.5
0
0
0
0.5
(c) Yamuk
1
0
0.5
(d) Gauss
Şekil 4.3. Çeşitli Üyelik Fonksiyonu Biçimleri
1
57
4.2.3. Bulanık Kümelerde Temel İşlemler
Klasik kümeler üzerinde tanımlanan üç temel işlem olan tümleyen alma, birleşim
ve kesişim işlemlerinin bulanık kümeler üzerine genişletilmesi işlemini birden fazla yolla
yapmak mümkündür. Bulanık kümeler ile, uygulama alanının getirdiği özelliklere göre
yeni işlemler tanımlanabilir. U uzayından, A kümesinin elemanlarını oluşturmak için
seçtiğimiz x objeleri [0,1] reel aralığında üyelik dereceleri alıyorlarsa, A kümesi bulanık
bir kümedir. µ A (x) , elemanları A kümesine üyelik derecelerini göstermektedir (Ross,
1995). Dolayısıyla bulanık kümeler sıralanmış ikililerden oluşur.
A = {( x, µ A ( x) x ∈ U }
(4.8)
Bu eşitliki Zadeh aşağıdaki şekilde ifade etmiştir.
A = {µ A (x1 ) / x1 + µ A ( x2 ) / x2 + ...}
= {i ∑ µ A ( xi ) / xi }
{
}
= ∫ µ A (x ) / x
(4.9)
4.2.3.1. Kapsama
A ve B’nin x’lerden oluşan bulanık kümeler olduğu varsayılmıştır. B’nin A’yı
kapsama şartı;
µ A ( x) ≤ µ B ( x) x ∈ X
A ⊂ B şeklinde sembolize edilir.
(4.10)
58
4.2.3.2. Denklik
A ve B ’nin x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A’nın B’ye
denk olma şartı:
(4.11)
µ A ( x) = µ B ( x)
olup A = B şeklinde sembolize edilir.
4.2.3.3. Kesişim
A ve B ’nin x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A ve B
bulanık kümesinin kesişimi A ∩ B şeklinde sembolize edilir.
µ A∩B = min{µ A ( x), µ B ( x)} x ∈ X
(4.12)
= µA ∧ µB
biçiminde tanımlanır. Kesişim "ve" birleştiricisine karşılık gelir.
4.2.3.4. Birleşim
A ve B ’nin x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A ve B
bulanık kümesinin birleşimi A ∪ B şeklinde sembolize edilir. A ∪ B bulanık kümesi, A
ve B ’yi kapsayan en küçük bulanık küme olarak tanımlanır. A ∪ B kümesi oluşturulurken
maksimum işlemcisi (∨ ) dikkate alınır. Birleşim;
µ A∪ B = max{µ A ( x), µ B ( x)}
= µ A ∨ µB
biçiminde tanımlanır.
x∈ X
(4.13)
59
4.2.3.5. Tümleyen
A
ve
B ’nin
x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır.
B ’nin A ’nın tümleyeni olması şartı:
µ Ac ( x) = 1 − µ B ( x) x ∈ X
(4.14)
olarak ifade edilir. A bulanık kümesinin tümleyeni Ac , A şeklinde sembolize edilir ve
tümleyen “değil” bağlacına karşılık gelir.
4.2.3.6. Cebirsel Toplam
A ve B ’nin x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A ve B ’nin
cebirsel toplamları:
µ A⊕ B ( x ) = µ A ( x) + µ B ( x) − µ A ( x) µ B ( x)
x∈ X
(4.15)
olarak ifade edilip, A ⊕ B şeklinde sembolize edilir.
4.2.3.7. Cebirsel Çarpım
A ve B ’nin x ’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A ve B ’nin
cebirsel çarpımları:
µ AB ( x ) = µ A ( x).µ B ( x)
olarak ifade edilip, AB şeklinde sembolize edilir.
x∈ X
(4.16)
60
4.2.3.8. Fark
A ve B’nin x’lerden oluşan bulanık kümeler olduğu varsayılmıştır. A’nın B’den
farkı;
{
}
µ A∩Bc ( x) = min µ A ( x), µ Bc ( x)
{
}
µ A∩ B c ( x) = µ A ( x) ∧ µ Bc ( x)
x∈ X
(4.17)
x∈ X
(4.18)
olarak sembolize edilir ve belirtilir.
4.3. Bulanık Sistemler için Bulanık Kurallar
İnsanlar kurallara dayanan kararlar oluştururlar. Örneğin oluşturduğumuz bütün
kararlar EĞER-İSE durumları şeklinde bilgisayara girilmektedir. Eğer hava durumu bugün
havanın kötü, yarın iyi olacağını söylüyorsa, dışarı çıkma kararını yarına erteleyebiliriz.
Kurallar, bir olayın diğerleriyle ilgili olarak, fikirlerin bir araya gelmesi ile oluşmaktadır.
Her zaman, insanın davranışlarını taklit etmeye çalışan bulanık makineler, aynı şekilde
çalışmaktadırlar. Bununla beraber, karar ve kararı seçen anlamlar bulanık kümeler ile yer
değiştirmektedir. A ve B, x ve y’nin kümeleri olmak koşulu ile, “EĞER x A İSE y B” dir
ve bulanık kurala örnek olarak gösterilebilmektedir (Taneva and Georgieva, 2003) .
Bulanık kurallar, bulanık mantıktaki anahtar fikir olan bulanık parçaları
tanımlamaktadır. Eğer parçalar geniş ise, kurallar dikkatsizce yapılmış demektir. Eğer
bulanık parçalar küçük ise, kurallar iyidir. Bulanık sistemdeki bu basitleştirme, tüm
kuralların parçalar halinde görülmesidir ve bulanık makinenin çıkışı bu parçalarla birlikte
birleşebilmektedir (Lin and Lu, 1995).
Bulanık bir kural, bulanık bir deyim ve teklifden oluşmaktadır. Bulanık kural
formu: “EĞER bulanık deyim İSE bulanık teklif” şeklindedir. Bulanık bir teklif, X
61
uzayında bulanık bir küme olan A için “x, A’dır.” genel şeklinin “yükseklik uzundur.” gibi
verilen bazı dilsel değişkenler için bir değer öne süren bir durumdur. Bulanık bir deyim,
bulanık teklifin cebirsel ikili ifadesidir.
Bulanık Uzman Sistemler’de kural formu aşağıdaki gibidir:
EĞER x
iyi
ve
y
zayıf
İSE
z
orta’dır.
Burada x ve y değişkenleri giriş değerleridir ve z, çıkış değişkenidir. Bu giriş ve
çıkış değişkenlerine sistemimizde istediğimiz isimleri atayabiliriz. Zayıf, orta ve iyi;
sırasıyla y, x ve z için tanımlanmış üyelik fonksiyonlarıdır. Kural iki kısımdan
oluşmaktadır; EĞER ve İSE. İkinci kısım, İSE’den sonra şartlı çıkış değeri tanımlanmıştır,
bu, kural sonucunu bildirmektedir.
Tipik bir bulanık uzman sistem birden fazla kuraldan oluşmaktadır. Kuralların
oluşturduğu yapı, kural tabanı veya bilgi tabanıdır. İstenen her kural ağırlıklarına göre
sıralanarak sistem kural tabanına yerleştirilebilir yani her kural için farklı ağırlıklar,
öncelikler tanımlanabilmektedir.
Günlük konuşmalarımızda kullanılan kelimelerin tanımında yatan belirsizlik,
vurguların sayısal olmaması belli esneklikler sağlar. Bulanık mantık kuralların eksik veya
“Bulanık” olarak tanımlandığı durumlarda kullanılan bir akıl yürütme yöntemidir ve etkin
olarak kullanılabilmesinin en önemli sebebi ise dilsel belirsizlikten kaynaklanan durum ve
olayların esnek kurallar ile temsil edilebilmesinden kaynaklanır. Temel iletişim aracımız
olan dil kesin olmaktan çok uzaktır. Kullandığımız sıfatlar algılamayı daha yalın hale
getirmeyi sağlarken, sınıflandırma yapma ifadeleri anlaşılır kılmayı sağlar. Burada sözü
edilen sınıflandırma türlerinin kesin sınırları yoktur. Bu sınıflandırmalar genellikle belli bir
aralık ve hassasiyet ile bağlantılıdır. O halde yaşadığımız dünyayı üyelik dereceleri ile
sınıflandırma doğal düşünce tarzıdır.
Genelde, bir dilsel değişkenin değeri birbirine bağlı anatomik terimlerden oluşan
birleşik bir terimdir. Bu terimler dört gruba ayrılabilir (Lin and Cunningham, 1995).
62
1. Birincil Terimler: Bu terimler tanım uzayının bulanık alt kümelerini tanımlayan
etiketlerdir. Yani “sıcak”, “soğuk”, “zor”, “düşük” v.b.,
2. Olumsuz DEĞİL (NOT) ve bağlaçlar VE (AND) ve VEYA (OR),
3. Pekiştirmeler, yani, “çok”, “daha”, “önemsiz”, hemen hemen” v.b.,
4. İşaretler, yani parantezlerdir.
Birleşik terimler gibi birincil terimler de olasılık etiketli “muhtemel”, “çok
muhtemel”, “muhtemel olmayan” gibi dilsel terimler olabilir. Ek olarak, birincil ve birleşik
terimler “doğru”, “oldukça doğru”, “çok doğru”, “yanlış”, “oldukça yanlış” ve “çok yanlış”
gibi doğru nicelikli yapılarla anlamlı olarak da düzeltilebilir. Olasılıklı etiketler olasılığa
dayanırlar. Kurallar gibi birincil terimler de kesinlik etiketli “tanımsız”, “bilinmeyen” ve
“tanımlı” gibi dilsel değişkenlerle sınırlanabilir. Şart kuralları birleşik veya basit şekilde
olabilir. Birleşik şart kuralları EĞER-İSE kurallar takımı formunda veya “değilse” veya “medikçe” gibi dilsel terimli kurallar olabilir.
Dilsel değişken terimler, “sıcak” veya “soğuk” gibi kelimeler ve ifadelerle
tanımlanabilen değişkenlerdir. Bir dilsel değişkenin değerleri bulanık kümeleri ile ifade
edilmektedir. Örneğin oda sıcaklığı dilsel değişken için “sıcak”, “soğuk” ve “çok sıcak”
ifadelerini alabilmektedir. Bu üç ifadenin her biri ayrı ayrı bulanık kümeleri ile
modellenmektedir (Nauck, 1995).
4.4. Bulanık Çıkarım İşlemi
Bulanık mantık kullanan bir sistemde, girişe verilen bilgiye karşılık, kural tabanı
kullanılarak bulanık çıkış elde edilmektedir. Bu işlem, sistemin karar verme yetkisine sahip
çıkarım birimi tarafından yapılmaktadır.
Kurallar ve üyelik fonksiyonları oluşturulan bulanık uzman sistem, bu verileri
bütünleştirmek, sistemden bir çıktı elde edebilmek için bulanık çıkarım mekanizmasına
ihtiyaç duyar. Çıkarım mekanizması, bilgi tabanının değerlendirilmesi için kurulmuş bir
uzman sistem aracıdır. Şekil 4.4’de bulanık çıkarım diyagramı verilmiştir.
63
Bulanık çıkarım, bulanık mantık kullanarak ayrıntılı olarak verilen bir girişi çıkış
haline dönüştüren işlemdir. Başlıca bulanık çıkarım sistemleri, Mamdani, Sugeno ve
Tsukamoto tipi bulanık çıkarımlarıdır.
1
EĞER
VE
İSE
2
EĞER
VE
İSE
girdi 1
girdi 2
çıktı
Şekil 4.4. Bulanık Çıkarım Diyagramı
Bu çalışmada Bulanık Sinir ağı olarak Sugeno Bulanık Çıkarım Metodu
kullanıldığı için, bu metod hakkında bilgi verilecektir.
4.4.1. Sugeno Bulanık Çıkarım Metodu
Bulanık çıkarım sistemlerinde ilk olarak Mamdani’nin bulanık çıkarım metodu
kullanılmıştır. Sugeno bulanık çıkarım metodu ise 1985 yılında verilen giriş ve çıkış
kümelerinden bulanık kurallar üretmede sistematik bir yaklaşım geliştirmek için Takagi
Sugeno ve Kang tarafından önerilmiştir. Bulanık çıkarım metodlarının ilk iki kısmı olan
girişlerin bulanıklaştırılması ve bulanık operatörlere uygulanması tam olarak bir birinin
aynısıdır. Mamdami ile Sugeno arasındaki en önemli fark Sugeno bulanık çıkarım
metodunun çıkış üyelik fonksiyonunun doğrusal veya sabit olmasıdır (Nauck and
Klawonn, 1996). Sugeno bulanık modelde tipik bir bulanık kural eşitlik 4.19’daki gibi
64
gösterilmektedir:
Eğer x A ise ve y B ise z = f ( x, y )
(4.19)
z = f ( x, y ) keskin fonksiyon iken A ve B bulanık kümelerdir. f ( x, y ) , x ve y
giriş değişkenleri olan bir polinomdur. f ( x, y ) birinci dereceden bir polinom olduğunda
bulanık çıkarım sisteminin sonucu birinci dereceden Sugeno Bulanık Model olarak
isimlendirilir. f sabit ise sıfırıncı dereceden Sugeno Bulanık Modeldir ve Mamdani
bulanık çıkarım sisteminin veya Tsukamato bulanık modelinin özel bir durumudur.
Tsukamoto da kuralların sonucu, adım fonksiyonunun merkezinin üyelik fonksiyonu ile
belirlenir.
Her kurala ait çıkış seviyesi olan z i , kuralların ağırlık ifadesi olan wi ile
ağırlıklandırılmıştır. Örneğin AND kuralı için 1. giriş= x ve 2. giriş= y iken wi aşağıdaki
şekilde ifade edilmektedir:
wi = AndMethod ( F1 ( x), F2 ( y ))
(4.20)
Burada F1, 2 () 1. giriş ve 2. giriş’e ait üyelik fonksiyonlarını ifade etmektedir. Sistemin en
son çıkış ifadesi tüm kuralların çıkışlarının ağırlıklandırılmış ortalamasıdır ve aşağıdaki
şekilde ifade edilmektedir (Nauck and Kruse,1994).
N
∑ wi zi
En son çıkış =
i =1
N
∑ wi
i =1
Sugeno, bulanık kuralları Şekil 4.5’deki gibi işlenmektedir.
(4.21)
65
Şekil 4.5. Sugeno Bulanık Çıkarım Metodu
Mamdami’ye göre daha kapsamlı olması ve işlemsel gücü açısından daha üstün
olmasından dolayı Sugeno bulanık çıkarım modeli adaptif tekniklerle birlikte bulanık
modellerin çözümünde büyük kullanım alanına sahiptir. Bu adaptif teknikler üyelik
fonksiyonlarını amaca göre özelleştirebilmekte böylece bulanık sistemler verileri en iyi
şekilde modelleyebilmektedir.
4.4.1.1 Sugeno Tipi Modelin Avantajları
a) Etkili işlem gücüne sahiptir.
b) Doğrusal tekniklerle çok iyi şekilde çalışmaktadır (PID kontrol).
c) Optimizasyon ve adaptif tekniklerle iyi bir şekilde çalışmaktadır.
d) Çıkış yüzeyinde sürekliliğe sahiptir.
e) Matematik analizlerle uyumlu bir şekilde çalışabilmektedir.
4.5. Bulanık Sistem Geliştirme Aşamaları
Bulanık bir Uzman Sistem geliştirme işlemi beş aşamada gerçekleşmektedir.
Bunlar aşağıdaki gibi sıralanır:
66
1. Problemin ve temel dilsel değişkenlerin belirlenmesi,
2. Bulanık kümelerin oluşturulması,
3. Bulanık kuralların belirlenmesi,
4. Bulanık çıkarımı oluşturmak için, bulanık kümeler ve bulanık kuralların uzman
sistem haline dönüştürülmesi,
5. Sistemin değerlendirilmesi ve düzeltilmesidir.
4.6. Bulanık Sinir Ağı (Neuro-Fuzzy)
Yapay sinir ağı ve bulanık mantık tekniklerinin her ikisi de temel olarak insan
beyninin çalışma mantığına dayanmaktadır. İnsan beyninin sonuç çıkarma mekanizmasını
taklit ederken, YSA’lar beynin fiziksel yapısı temel alınarak oluşturulmuştur. Her iki
teknik de kontrol edilecek sistemin matematik modeline ihtiyaç duymazlar, bu sayede
karmaşık ve doğrusal olmayan sistemler ile doğrusal sistemleri modelleyebilirler (Dang,
2004).
Bulanık sinir ağı, yapay sinir ağları ve bulanık sistemlerin sentezlenmesinden
meydana gelen yapay zeka tekniklerinden birisidir. Bulanık mantığın belirsiz bilgileri
işleme yeteneğinden ve yapay sinir ağının öğrenme yeteneğinden yararlanabilmek için bu
iki teknoloji değişik yöntemlerle birleştirilmektedir (Jacceh, 2003) .
Yapay sinir ağı giriş ve çıkış eğitim çiftleri verilen bir statik fonksiyonu
öğrenebilmektedir.
Öğrenme
işlemi,
ağ
içerisindeki
ağırlıkların
belirlenmesiyle
gerçekleşmekte ve verilen fonksiyona optimal yaklaşım sağlanmaktadır.
Yapay sinir ağı bulanık sistemin parametrelerini belirlemek için kullanılmaktadır.
Öğrenme aşamasından sonra bulanık sistem yapay sinir ağına ihtiyaç duymadan
çalışmaktadır. Sistem eğitim yaparken yapay sinir ağını, karar verme işleminde de bulanık
mantığı kullanmaktadır. Bulanık sinir ağı ile yapılan farklı bir çok uygulama literatürde
mevcuttur (Marsequera, 2004).
67
Bulanık sinir ağı, bulanıklaştırma katmanı, iki saklı katman, fonksiyon katmanı ve
berraklaştırma katmanı olmak üzere dört katmandan oluşmaktadır
Bulanıklaştırma katmanının girişleri, bulanık çalışma bölgelerini tanımlamak için
kullanılan sistem değişkenleridir. Bu katmanda üç tip işlem birimi olan aktivasyon
fonksiyonları kullanılmaktadır; sigmoid, gauss ve ters sigmoid fonksiyonları
Kural katmanını bulanık çıkarım gerçekleştirmektedir. Bu katmandaki işlem
birimleri sigmoid fonksiyonu kullanmaktadır. Kural katmanının ilk katmanındaki işlem
birimleri girişlerinin her biri bir bulanık kümeye karşılık gelmektedir. Son katmandaki her
bir işlem biriminin çıkışı ise çalışma bölgelerinin üyelik fonksiyonları olmaktadır.
Fonksiyon katmanındaki işlem birimleri, bulanık çalışma bölgeleri için azaltılmış
dereceli modelleri gerçekleştirmektedir. Her bir işlem birimi bir çalışma bölgesine karşılık
gelmektedir. İşlem birimlerinin çıkışları, ağırlıklandırılmış sistem değişkenlerinin
toplamıdır. Fonksiyon katmanındaki ağırlıklar, çalışma bölgelerindeki doğrusal modellerin
parametreleridir.
Berraklaştırma işlem biriminin girişi, çalışma bölgeleri ve bu bölgelere ait üyelik
fonksiyonlarıdır. Berraklaştırma katmanı, ağırlık yöntemi ile berraklaştırma işlemini
gerçekleştirmekte ve ağ çıkışını oluşturmaktadır.
Bulanık mantık kontrolü, sağduyuya dayalı kurallar kullanarak sistemleri tanımlar
ve kontrol eder. Bu kurallar, “X İSE Y” – X giriş, Y çıkış – formunda kurallardır. Bulanık
mantıkta matematik değişkenler yerine insanın karar verme mekanizmasını taklit edecek
şekilde kelimelerle ifade edilen değişkenler kullanılır. Geleneksel mantıkta bir değişkenin
gerçeklik değeri ya “1” ya da “0” olabilir. Ancak bulanık mantıkta bu değer 0 ile 1 aralığı
içindeki tüm değerleri alabilir. Bu değerlere üyelik değeri adı verilir. Bir girdinin hangi
üyelik değerini alacağını belirleyen eğriler, üyelik fonksiyonları olarak adlandırılır.
Kullanılan matematiğin basit olması, doğrusal olmayan sistemleri modelleyebilme
yeteneği, günlük dile dayalı olması, esnek olması (kesin sınırlardan oluşmaması) ve kesin
olmayan bilgiye karşı toleranslı olması bulanık mantığa dayalı sistemlerin kullanımının
getirdiği en önemli avantajları arasındadır.
68
YSA’lar ise beynin fizyolojik yapısı temel alınarak tasarlanan sistemler olup
birbirleriyle paralel çalışan çok sayıda basit işlemciden oluşurlar. Bir sinir ağının davranış
biçimini büyük oranda nöronlar arasındaki bağlantılar belirler; öğrenilen tüm bilgi bu
bağlantılarda saklıdır. YSA’lar belirli bir işlevi yerine getirmek için eğitilebilirler ve bu
eğitim ise bağlantıların değerlerini değiştirmekle sağlanır. YSA’ları geleneksel
sistemlerden ayıran en önemli özellikleri öğrenme, genelleme yapabilme ve paralel çalışma
özellikleridir. Bu özellikler yapay sinir ağlarına hız, hataya karşı tolerans ve verimlilik gibi
avantajlar kazandırmaktadır.
Şekil 4.6’da birçok uygulamada kullanılan ANFIS (Adaptive Neuro Fuzzy
Inference System-Adaptif Bulanık Sinir Ağı Çıkarım Sistemi) yapısına ait şekil verilmiştir.
Şekil 4.6. Basit Bir ANFIS Yapısı
Giriş ve çıkış eğitim çiftleri verilen bir fonksiyonu, yapay sinir ağı
öğrenebilmektedir.
Öğrenme
işlemi,
ağ
içerisindeki
ağırlıkların
belirlenmesiyle
gerçekleşmekte ve verilen fonksiyona optimal yaklaşım sağlanmaktadır. Böylece yapay
sinir ağları sistemi öğrenmektedir.
Bulanık mantığın belirsiz bilgileri işleme ve yapay sinir ağının öğrenme yeteneği,
sistem modelleme de kullanılmıştır (Jogle, 2004). Aynı zamanda bulanık mantık ve yapay
sinir ağının birleştirilmesi, birbirlerinin dezavantajlarını da örtmektedir. Sistem
69
modellemeye, hem bulanık mantık hem de yapay sinir ağı açısından ayrı ayrı bakıldığında,
modelleme aşamaları Tablo 4.1’deki gibidir.
Tablo 4.1. Bulanık Mantık ve YSA Açısından Sistem Modelleme Adımları
Adım Bulanık Mantık açısından
1
Giriş değişkenlerinin belirlenmesi
2
Gerekli olan üyelik fonksiyonu ve
kural sayısının belirlenmesi
3
Üyelik
fonksiyonlarının
ayarlanması
4
Gereksiz kuralların belirlenmesi
Yapay Sinir Ağı açısından
Giriş değişkenlerinin belirlenmesi
Ağ
yapısının
ve
başlanğıç
ağırlıklarının belirlenmesi
Ağın eğitilmesi
Gereksiz hücrelerin iptal edilmesi
4.7. Bulanık Sinir Ağı ile Sistem Modelleme
Matematik modeli verilen fiziksel bir sistemin, analizi yapılabilir veya değişik
girişlere karşılık çıkışları kestirilebilir. Bununla beraber, sistemin matematik modelinin
belirlenmesinde zorluklar çıkabilmektedir. Basit bir sistem için, Newton yöntemi
kullanılarak bir model üretilebilir. Fakat karmaşık sistemerde bu yöntem yeterli
olmamaktadır.
Giriş ve çıkış eğitim çiftleri verilen bir statik fonksiyonu, yapay sinir ağı
öğrenebilmektedir.
Öğrenme
işlemi,
ağ
içerisindeki
ağırlıkların
belirlenmesiyle
gerçekleşmekte ve verilen fonksiyona optimal yaklaşım sağlanmaktadır. Ancak yapay sinir
ağı ile yapılan modelleme işleminde fazla sayıda ağırlık kullanılmaktadır. Bu da geliştirilen
model üzerinde yorum yapılmasını güçleştirmektedir. Ayrıca sınırlı veya gürültülü eğitim
bilgisi kullanıldığında sistem çıkışından tutarsız veya anlamsız bilgi alınmaktadır.
Bulanık mantık, sinir ağları, genetik algoritmalar ve uzman sistemler gibi bütün
yapay zeka tekniklerinin her birinin kendine özgü yetenekleri bulunmaktadır. Örneğin
yapay sinir ağları öğrenme ve örnekleri tanımlamada başarılıyken, kararların nasıl alındığı
konusunda başarılı değildir. Bulanık mantık yaklaşımı karar almada çok iyi sonuçlar verir,
fakat karar alma sürecindeki kural oluşturmayı kendiliğinden gerçekleştiremez. Sinirsel
70
bulanık mantık yaklaşımı; yapay sinir ağlarının öğrenme yeteneği, en uygunu bulma ve
bağlantılı yapılar ile bulanık mantığın insan benzeri karar verme ve uzman bilgisi sağlama
kolaylığı üstünlüklerinin birleştirilmesi fikrine dayanmaktadır. Bu yolla bulanık denetim
sistemlerine öğrenme ve hesaplama gücü verilebilirken sinir ağlarına da bulanık denetimin
insan gibi karar verme ve uzman bilgisi sağlama yeteneği kazandırılmaktadır. Sinirsel
bulanık denetim sisteminin asıl amacı, sinirsel bulanık denetim sistemlerinin yapısındaki
değişkenlerini ayarlamak ve bulmak için sinirsel öğrenme tekniklerini uygulamaktır.
Bulanık mantık denetleyicilerde, yapısal ve değişken ayarlama olmak üzere iki önemli
ayarlama gerekir. Yapısal ayarlama hesaplanacak değişkenlerin sayısı, kuralların sayısı ve
her bir giriş çıkış değişkeninin tanım uzaylarının bölümlenmesi gibi bulanık mantık kural
yapılarının ayarlarından oluşur. Uygun kural yapısının elde edilmesinden sonra denetleyici
değişkenlerin ayarlanmasına ihtiyaç duyar. Değişkenlerin ayarlanması bölümünde üyelik
işlevlerinin uygun merkezleri, eğimleri, genişlikleri ve bulanık mantık kurallarının
ağırlıkları hesaplanır. ANFIS sistemi hem sayısal verilerin hem de dilsel verilerin
işlenmesine olanak verir. Aynı zamanda sayısal verilerden faydalanarak bulanık bilginin
ayarlanması yeteneğine sahiptir.
ANFIS sistemi ile ne kadar fazla data olursa sonuca da o kadar az hata ile
ulaşılabilmektedir. Günümüzde ANFIS yapısı ile sistem modelleme, sınıflandırma ve
denetimi gün geçtikçe önem kazanmaktadır. Çünkü ANFIS yapay sinir ağlarının kolay
eğitebilme yeteneğini ve bulanık mantığın insan bilgi ve tecrübesini sistem içine
yerleştirme gibi avantajlarının her ikisine de sahiptir.
Bulanık mantığın belirsiz bilgileri işleme yeteneğinden ve yapay sinir ağının
öğrenme yeteneğinden yararlanabilmek için, bu iki teknoloji birleştirilebilmektedir. Aynı
zamanda bulanık mantık ve yapay sinir ağının birleştirilmesi, birbirlerinin dezavantajlarını
da örtmektedir.
71
5.METARYAL VE METOD
5.1. Numune Hazırlanması
Bu çalışmada Mn/n-GaAs Schottky diyodların hidrostatik basınç altında seri
direnç, engel yüksekliği ve idealite faktörü gibi parametreleri literatürdeki farklı birkaç
yöntemle incelendi. Ayrıca deney verileri kullanılarak ANFIS yöntemiyle tam bir
karakterizasyon elde edildi. Böylece uygulanan basınç aralığında ölçümü alınmayan
istediğimiz ara basınç değerlerinin tamamı için ANFIS yardımıyla veriler elde edildi.
Çalışmamızda deneysel sonuçları kullanılan, Mn/n-GaAs Schottky diyodu LPE
(Lıquid-Phase Epitaxy) tekniği ile büyütülmüş [100] doğrultusuna sahip, özdirenci
ρ = 0.0015 − 0.0073 Ω-cm-3 olan Te (Tellür) katkılanmış n-tipi GaAs numunesi
kullanılmıştır. Numune üzerindeki organik ve ağır metal kirliliklerini temizlemek ve
yüzeydeki pürüzleri gidermek için kimyasal temizleme yapılmıştır. n-tipi GaAs üzerine
omik kontak elde etmek için, Au-Ge metalizasyonu yapılarak 425 0C de 3 dakika tavlanmış
ve Schottky kontak elde etmek için, %99.9 saflıkta Mn buharlaştırılmıştır. Bütün bu
metalizasyon işleri turbo moleküler vakum kaplama ünitesinde 10−6 mbar’lık basınç altında
gerçekleştirilmiştir. Bu işlemlerden sonra Schottky diyotu elde edilmiştir. Çalışmamızda
bu diyotun elektriksel ölçümleri kullanılarak değişik metodlarla incelenmiştir.
5.2. Akım – Gerilim ( I − V ) Ölçümleri ve Basıncın Diyot Parametrelerine
Etkisi
Çalışmamızda sonuçları kullanılan, Mn/n-GaAs Schottky diyodunun basınç
altındaki I − V ölçümleri, yüksek basınç hücresi ve bilgisayar kontrollü Keithley model
487 pikoampermetresi (Keithley 487 Picoammeter/Voltage Source) kullanılarak otomatik
olarak alınmıştır.
72
Hidrostatik basıncın diyot parametrelerinden engel yüksekliğine olan etkisi teorik
olarak 1987 yılında Balusubramanbyan ve Kumar tarafından aşağıdaki işlem sırası takip
edilerek elde edilmiştir. İdeal olmayan durumlar için boyutsuz n idealite faktörü 2.4
eşitliğine ilave edilirse toplam akım,
eV
eV
I = I 0 exp
1 − exp −
nkT
kT
(5.1)
şeklinde yazılabilir. Burada eV >> 3kT olması durumunda exponansiyel ifade 1 yanında
ihmal edilebileceğinden,
eV
I = I 0 exp
nkT
(5.2)
olur. q elektronun yükü , V uygulanan voltaj, n idealite faktörü, k Boltzman sabiti, T ise
sıcaklıktır, I 0 doyma akımı ise ,
eφ
I 0 = AA∗T 2 exp − b
kT
(5.3)
ile ifade edilir. Burada A=7.85 × 10 −3 cm 2 etkin diyot alanı, φb engel yüksekliği ve A∗
etkin Richardson sabitidir. n idealite faktörü bulmak için 5.2 eşitliğinden,
n=
e
dV
kT d (ln(I ))
(5.4)
elde edilir. φb Engel yüksekliği değerinin hesap edilmesi için 5.3 eşitliğindeki, I 0 doyma
akım yoğunluğu ifadesinden de engel yüksekliği,
AA∗T 2
eφb = kTΙn
I0
eşitliği bulunur. Burada A∗ Richardson sabiti değeri n-GaAs için A∗ = 8.16
(5.5)
A
dir.
cm 2 K 2
73
0.00-7.00 kbar aralığında alınan I − V ölçümlerinden hareketle win-grapher paket
programı kullanılarak diyodun düz ve ters beslem için I − V karakteristikleri çizildi.
Burada I 0 doyma akımı ve eğrilerin eğimleri 0.0-0.4 V aralığında düz beslem kısmının
lineer kısmına eğri fit edilmesiyle Şekil 5.1 ve Şekil 5.2 de sırasıyla tez yazarı ve gözlemci
tarafından bulundu. Eşitlik 5.5’de bu I 0 değeri kullanılarak φb engel yüksekliği ve eşitlik
5.4’de elde edilen eğim değeri kullanılarak n idealite faktörü hesaplandı. 0.00-7.00 kbar
basınç aralığındaki düz beslem fitleri kullanılarak hesap edilen idealite faktörü ve engel
yüksekliği değeri Tablo 6.1 ve Tablo 6.2’de verildi.
I 0 doyma akımının bulunmasında diğer bir yöntem olan hem düz hemde ters
beslemin lineer kısımlarına birer eğri fit edip bu eğrilerin akım ekseni üzerinde V=0’da
kesiştirilmesi Şekil 5.3’de gösterilmiştir. Sonra düz beslem kısmı kullanılarak buradaki
kesişme noktasından I 0 değeri ve eğimi elde edildi. Eşitlik 5.5 ve eşitlik 5.4 yardımıyla
sırasıyla φb engel yüksekliği ve n idealite faktörü hesaplandı. 0.00-7.00 kbar basınç
aralığındaki düz beslem fitleri kullanılarak hesap edilen idealite faktörü ve engel
yüksekliği değeri Tablo 6.1 ve Tablo 6.2’de verildi.
74
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
0.00 kbar
1.00 kbar
1.0E-8
3.00 kbar
5.00 kbar
7.00 kbar
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.1. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz beslem I-V
grafiği ve tez yazarı tarafından yapılan düz beslem fit eğrileri
75
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
0.00 kbar
1.00 kbar
1.0E-8
3.00 kbar
5.00 kbar
7.00 kbar
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.2. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz beslem I-V
grafiği ve Gözlemci tarafından yapılan düz beslem fit eğrileri
76
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
0.00 kbar
1.00 kbar
1.0E-8
3.00 kbar
5.00 kbar
7.00 kbar
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.3. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç ile ters ve düz beslem I-V
grafikleri ile ters ve düz beslem fitleri
77
5.3. Missous Yöntemi Kullanılarak Diyot Parametrelerinin Belirlenmesi
0.00-7.00 kbar aralığında alınan I − V ölçümleri kullanılarak 2.12 eşitliğinin
eV
logaritması alınıp ters ve düz beslem için I 1 - exp −
− V grafiği çizildi (Şekil 5.4).
kT
Bu grafiğin lineer kısmına fit edilen doğrunun V = 0 da düşey ekseni kestiği noktadan her
bir basınç değeri için I 0 doyma akımı ve doğrunun eğimi belirlenir.
Eşitlik 5.5’de bu I 0 değeri kullanılarak φb engel yüksekliği ve eşitlik 5.4’de elde
edilen eğim değeri kullanılarak n idealite faktörü hesaplandı. 0.00-7.00 kbar basınç
aralığındaki Missous Yöntemi kullanılarak hesap edilen idealite faktörü ve engel
yüksekliği değerleri Tablo 6.1ve Tablo 6.2’de verildi.
5.4. Norde Fonksiyonu Kullanılarak Diyot Parametrelerinin Belirlenmesi
2.23 eşitliğii ile verilen Bohlin tarafından modifiye edilmiş norde fonksiyonunu
kullanarak her basınç değeri için idealite faktörleri, engel yükseklikleri ve diyodun nötral
bölgesinin seri dirençleri hesap edildi. Bu hesaplamada önce eşitlik 5.4’de elde edilen eğim
değeri kullanılarak n idealite faktörleri hesaplandı. Daha sonra her basınç değeri için
F (V ) − V grafiği çizildi (Şekil 5.5). Bu grafikte F (V ) fonksiyonunun değerini minumum
yapan I 0 ve V0 değerleri hesaplandı.
Bulunan n , V0 ve n , I 0 değerleri, 2.27 ve 2.28 eşitliklerinde yerine koyularak
her basınç değeri için sırasıyla engel yükseklikleri ve seri direnç değerleri hesaplandı. 0.007.00 kbar basınç aralığındaki Norde fonksiyonları kullanılarak hesap edilen engel
yüksekliği ve seri direnç değerleri Tablo 6.2 ve Tablo 6.3’de verildi.
78
Şekil 5.4. Missous yöntemi kullanılarak Mn/n-tipi GaAs Schottky diyotunun uygulanan
basınç ile ters ve düz beslem I-V grafiği
79
0.60
0.59
F(V) (V)
0.58
0.57
0.56
Mn/n-GaAs
T=300 K
0.00 kbar
0.55
1.00 kbar
3.00 kbar
5.00 kbar
7.00 kbar
0.54
0.00
0.10
0.20
0.30
0.40
Gerilim (V)
Şekil 5.5. Norde Fonksiyonları kullanılarak Mn/n-tipi GaAs Schottky diyotunun
uygulanan basınca göre F (V ) − V grafiği
80
5.5.
Cheung
Fonksiyonlarını
Kullanılarak
Diyot
Parametrelerinin
Belirlenmesi
2.33 ve 2.35 eşitlikleri ile verilen Cheung fonksiyonlarını kullanarak, her basınç
değeri için idealite faktörleri, engel yükseklikleri diyodların nötral bölgesinin seri
dirençleri tez yazarı ve gözlemci tarafından hesap edildi. Bu hesaplama için
dV d (ln I ) ’nin I ya karşı çizilen grafiği bir doğru verir. Bu doğrunun eğiminden seri
direnci, düşey (y) eksenini kestiği noktadan ise idealite faktörü, birinci Cheung fonksiyonu
yardımıyla hesaplandı.
H ( I ) ’ya karşı I grafiğinden yine bir doğru elde edilir. Bu doğrunun eğimi ve
H ( I ) ’nin ekseninin kesim noktasından sırasıyla nötral bölge direnci olan seri direnç ve
engel yüksekliği, ikinci Cheung fonksiyonunu kullanarak hesaplandı (Cheung ve
Cheung,1986).
0.00-7.00 kbar basınç aralığındaki sırasıyla tez yazarı ve gözlemci tarafından,
dV d (ln I ) ’nin I ya karşı ve H ( I ) ’nın I karşı grafikleri çizilerek fit edildi (Şekil 5.6-5.7
ve Şekil 5.8-5.9). Her bir basınç değerine karşılık gelen fit edilen grafiklerden elde edilen
idealite faktörleri, engel yükseklikleri ve seri direnç değerleri hesap edilerek Tablo 6.13’de verildi.
81
dV/d(ln I) (V)
0.10
0.08
Mn/n-GaAs
T=300 K
0.06
0.00 kbar
1.00 kbar
3.00 kbar
0.04
5.00 kbar
7.00 kbar
0.02
0.0E+0
5.0E-4
1.0E-3
1.5E-3
2.0E-3
I (A)
Şekil 5.6. Tez yazarı tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan basınca göre
dV d (ln I ) − I grafiği
0.10
dV/d(ln I) (V)
0.08
Mn/n-GaAs
T=300 K
0.06
0.00 kbar
1.00 kbar
3.00 kbar
0.04
5.00 kbar
7.00 kbar
0.02
0.0E+0
5.0E-4
1.0E-3
1.5E-3
2.0E-3
I (A)
Şekil 5.7. Gözlemci tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan basınca göre
dV d (ln I ) − I grafiği
82
H(I) (V)
0.80
Mn/n-GaAs
T=300 K
0.70
0.00 kbar
1.00 kbar
3.00 kbar
5.00 kbar
7.00 kbar
0.60
0.0E+0
5.0E-4
1.0E-3
1.5E-3
2.0E-3
I (A)
Şekil 5.8. Tez yazarı tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan basınca göre
H ( I ) − I grafiği
H(I) (V)
0.80
Mn/n-GaAs
T=300 K
0.70
0.00 kbar
1.00 kbar
3.00 kbar
5.00 kbar
7.00 kbar
0.60
0.0E+0
5.0E-4
1.0E-3
1.5E-3
2.0E-3
I (A)
Şekil 5.9. Gözlemci tarafından Mn/n-tipi GaAs Schottky diyotunun uygulanan basınca göre
H ( I ) − I grafiği
83
5.6. ANFIS Kullanılarak Diyot Parametrelerinin Belirlenmesi
Bölüm 3 ve Bölüm 4 de verilen Yapay Sinir Ağı ve Bulanık Mantık birleştirilerek
oluşturulan Adaptif Bulanık Sinir Ağı Çıkarım Sistemi (ANFIS) kullanılarak deney
aralığındaki deneyi yapılmış yada yapılmamış her basınç ve gerilim değeri için
I − V grafikleri elde edildi.
Bulanık mantığın belirsiz bilgileri işleme ve yapay sinir ağının öğrenme yeteneği
2 girişli ve tek çıkışlı ANFIS yapısında kullanılmıştır. Girişlerden ilki basınç ve ikincisi
gerilimdir, çıkış ise akımdır. Fiziksel kural bilinmediği için kara kutu modeli kullanılmış
ve her basınç değerinin eğitimi için 128 adet deneysel veri kullanılmıştır. Programlama
için ANFIS yapısı kullanılmıştır. ANFIS, Sugeno tip FIS tek çıkışlı sistemin üyelik
fonksiyon parametrelerini belirlemek için hibrid (hybrid) öğrenme algoriması kullanıldı.
Hibrid öğrenme algoritması LSE ve BGD metodunun birleşiminden oluşmaktadır, girişçıkış bilgileri verilen FIS üyelik fonksiyon parametrelerinin eğitimi için kullanır. Deneme
yanılma yöntemiyle girişler için iki, çıkış için ise yedi üyelik derecesi belirlenmiştir. Bu
yapıda 42 tane doğrusal, 27 tane doğrusal olmayan toplam 69 değişken kullanılmıştır.
Ayrıca 14 tane bulanık kural oluşturulmuştur. Eğitim için verilen verilere deneme yanılma
yöntemiyle Gbellmf üyelik fonksiyonuna uyduğu görülmüş ve diğer verilerin eğitimlerinde
de bu üyelik fonksiyonu kullanılmıştır.
Programda deneysel veriler kullanılarak 5 farklı basınç değeri için 640x3 matris
oluşturulmuş; matrisin birinci sütun basınç, ikincisi gerilim ve üçüncüsü ise akımdır.
Deneysel sonuçların ANFIS eğitimi sonucunda elde edilen veriler ve deneysel veriler wingrapher paket programı kullanılarak çizdirilmiştir (Şekil 5.10-14). Belirlediğimiz ara
basınç değerleri olan 0.5 kbar,1.5 kbar, 2.0 kbar, 4.0 kbar ve 6.0 kbar ve gerilim değerleri
için aynı program içerisinde oluşturulan 14 kurala göre ANFIS de yapılan programdan bu
basınç değerleri için gerilime karşı akım değerleri elde edilmiştir. ANFIS’den elde edilen
deneysel sonuçlar ile belirlenilen ara basınç sonuçları win-grapher paket programı
kullanılarak çizdirilmiştir (Şekil 5.15-19).
84
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
0.00 kbar ANFIS
0.00 kbar Deneysel
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.10. 0.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
85
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
1.00 kbar ANFIS
1.00 kbar Deneysel
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.11. 1.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
86
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
3.00 kbar ANFIS
3.00 kbar Deneysel
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.12. 3.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
87
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
5..00 kbar ANFIS
5.00 kbar Deneysel
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.13. 5.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
88
1.0E-2
1.0E-3
Mn/n-GaAS
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
7.00 kbar ANFIS
7.00 kbar Deneysel
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.14. 7.00 kbar basınç için ANFIS ve Deneysel veriler kullanılarak oluşturulan
Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem I-V grafiği
89
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
0.00 kbar ANFIS
0.50 kbar ANFIS
1.00 kbar ANFIS
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.15. ANFIS kullanılarak 0.00 kbar ve 1.00 kbar basınç değerleri arasında elde edilen
0.50 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem
I-V grafiği
90
1.00E-2
Mn/n-GaAs
1.00E-3
T=300 K
1.00E-4
Akım (A)
1.00E-5
1.00E-6
1.00E-7
1.00E-8
1.00 kbar ANFIS
1.50 kbar ANFIS
3.00 kbar ANFIS
1.00E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.16. ANFIS kullanılarak 1.00 kbar ve 3.00 kbar basınç değerleri arasında elde edilen
1.50 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem
I-V grafiği
91
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
1.00 kbar ANFIS
2.00 kbar ANFIS
3.00 kbar ANFIS
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.17. ANFIS kullanılarak 1.00 kbar ve 3.00 kbar basınç değerleri arasında elde edilen
2.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem
I-V grafiği
92
1.0E-2
1.0E-3
Mn/n-GaAs
T=300 K
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
3.00 kbar ANFIS
4.00 kbar ANFIS
5.00 kbar ANFIS
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.18. ANFIS kullanılarak 3.00 kbar ve 5.00 kbar basınç değerleri arasında elde edilen
4.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem
I-V grafiği
93
1.0E-2
Mn/n-GaAs
T=300 K
1.0E-3
1.0E-4
Akım (A)
1.0E-5
1.0E-6
1.0E-7
1.0E-8
5.00 kbar ANFIS
6.00 kbar ANFIS
7.00 kbar ANFIS
1.0E-9
-0.40
-0.20
0.00
0.20
0.40
Gerilim (V)
Şekil 5.19. ANFIS kullanılarak 5.00 kbar ve 7.00 kbar basınç değerleri arasında elde edilen
6.00 kbar basınç için Mn/n-tipi GaAs Schottky diyotunun ters ve düz beslem
I-V grafiği
94
6. SONUÇLAR VE TARTIŞMA
Yarıiletken diyotların I − V karakteristikleri yardımıyla elde edilen parametreleri,
elektronik tasarımlarında önemli yer tutmaktadır. Çığ gibi büyüyen elektronik sanayisinde,
değişik yöntemlerle malzeme parametrelerinin her geçen gün iyileştirilmesi ve
çeşitliliğinin
artması,
malzemelerin
karakterizasyonlarından
yapılan
parametre
hesaplamalarında yeni metodlar bulunmasının yolunu açmıştır. Bu hesaplamaların hepsi
TE teorisine dayandırılmaktadır.
Çalışmamızda, Mn/n-GaAs Schottky diyodu LPE (Lıquid-Phase Epitaxy) tekniği
ile büyütülmüş bir yüzeyi mat diğer yüzeyi parlatılmış [100] doğrultusuna sahip, özdirenci
ρ = 0.0015 − 0.0073 Ω-cm-3 olan Te (Tellür) katkılanmış n-tipi GaAs numunesinin
deneysel sonuçları kullanılmıştır. Numune üzerindeki organik ve ağır metal kirliliklerini
temizlemek için kimyasal temizleme yapılmış, n-tipi GaAs üzerine omik kontak elde
etmek için ise Au-Ge metalizasyonu yapılarak 425 0C de 3 dakika tavlanmış ve Schottky
kontak elde etmek için %99.9 saflıkta Mn buharlaştırılmıştır.
Bu koşullar altında hazırlanan ve sonrasında basınç ünitesine yerleştirilen Mn/ntipi GaAs Schottky diyotun üniteden çıkarılan elektriksel bağlantılarla 0.00-7.00 kbar’lık
basınç aralığında I − V ölçümleri çalışmamızda karakterizasyonları oluşturulmak üzere
alınmıştır.
Hesaplamalar için akım iletimini açıklayan Termoiyonik Emisyon Teorisi
kullanılmıştır. Schottky diyot parametrelerinin hesaplanmasında Termoiyonik Emisyon
Teorisini temel alarak literatürde çokca kullanılan Missous yöntemi, Norde Fonksiyonu ve
Cheung Fonksiyonları yardımıyla diyot parametrelerini hesaplaplandı. Ayrıca deneysel
veriler yardımıyla deney aralığını ANFIS ile tanımlayıp bu deney aralığında deneysel
verileri ve belirlediğimiz basınç değerleri için karakterizasyonun tüm değerlerini belirledik.
Teorik olarak verilen denklemde basınç parametresi bulunmamasına rağmen böylece bu
çalışma ile hidrostatik basıncın etkisini kısmende olsa hesaplamaya ilkkez tarafımızdan
dahil edilmiş oldu.
95
Termoiyonik Emisyon (TE) teorisini kullanarak I − V eğrilerinin doğrudan fit
edilerek yapılan hesaplamalarında iki yöntem kullanıldı. İlk olarak tez yazarı ve gözlemci
tarafından ters ve düz beslem I − V grafikleri kullanıldı (Şekil 5.1-5.2). Her basınç için
çizilen bu grafiklerdeki düz beslem kısmının lineer kısmına eğriler fit ederek eğrinin eğimi
ve y eksenini kestiği nokta tez yazarı ve gözlemci tespit edildi. İkinci olarak da her basınç
için çizilen bu grafiklerdeki ters ve düz beslemlerinin lineer kısımlarının her ikisininde y
eksenini aynı noktada kestiği durum için eğriler fit edilerek y üzerindeki nokta tespit edildi
(Şekil 5.3). Bu değerleri kullanarak idealite faktörleri ve engel yükseklikleri hesaplandı,
Tablo 6.1 ve Tablo 6.2 de verildi. Hesapladığımız bu değerler 0.00, 1.00, 3.00, 5.00 ve
7.00 kbar değerlerine karşılık tez yazarı ve gözlemci için sırasıyla idealite faktörü için
1.140, 1.060, 1.044, 1.028, 1.021 ve 1.130, 1.079, 1.102, 1.104, 1.076 olarak, ikinci
yöntemlede 1.269, 1.227, 1.230, 1.210, 1.197 olarak hesaplanmıştır. Engel yüksekliği için
yine sırasıyla 0.588, 0.602, 0.621, 0.641, 0.660 eV ve 0.585, 0.598, 0.614, 0.632, 0.652 eV,
ikinci yöntemlede 0.574, 0.584, 0.601, 0.621, 0.639 eV olarak hesaplanmıştır
Missous yöntemini kullanarak yaptığımız bu hesaplamalarda 0.00-7.00 kbar
aralığında alınan I − V ölçümleri kullanılarak ters ve düz beslem için logaritmik
eV
I 1 - exp −
− V grafiği çizilip, bu grafiğin lineer kısmına fit edilen doğrunun y
kT
eksenini kestiği noktadan her bir basınç değeri için I 0 doyma akımı ve doğrunun eğimi
belirlenerek idealite faktörü ve engel yüksekliği hesaplandı (Şekil 5.4). 0.00, 1.00, 3.00,
5.00 ve 7.00 kbar basınç değerlerine karşılık sırasıyla idealite faktörleri 1.104, 1.088,
1.084, 1.081, 1.080 ve engel yükseklikleri ise 0.587, 0.593, 0.611, 0.628, 0.646 eV olarak
bulunmuştur (Tablo 6.1-6.2).
F(V)-V grafiği çizildiğinde F (V ) fonksiyonunun değerini minumum yapan I 0 ve
V0 değerleri hesaplandı (Şekil 5.5). Bulduğumuz bu değerlerden Norde fonksiyonunu
yardımıyla engel yüksekliği ve seri direnci hesaplandı. 0.00, 1.00, 3.00, 5.00, 7.00 kbar
basınç değerlerine karşılık sırasıyla engel yükseklikleri 0.594, 0.614, 0.627, 0.647, 0.667
eV ve seri dirençler ise 44.986, 22.920, 30.583, 30.986, 48.571 Ω olarak bulunmuştur
(Tablo 6.2-6.3).
96
dV/d(lnI)’in I ’ye karşı çizilen grafikten elde ettiğimiz doğrunun eğiminden seri
direncini, y eksenini kestiği noktadan ise idealite faktörleri tez yazarı ve gözlemci
tarafından hesaplandı (Şekil 5.6-5.7). Cheung fonksiyonlarının birincisini kullanarak
bulunan bu değerleri 0.00, 1.00, 3.00, 5.00, 7.00 kbar basınç değerlerine karşılık sırasıyla
seri direnci için 53.448, 21.050, 27.037, 30.587, 47.405 Ω ve 52.403, 21.206, 27.106,
30.587, 47.775 Ω, idealite faktörü için ise 1.072, 1.091, 1.100, 1.101, 1.107 ve 1.089,
1.085, 1.097, 1.101, 1.090 değerleri hesaplanmıştır (Tablo 6.1-3).
Engel yüksekliğini bulmak için ikinci Cheung fonksiyonu adı verilen H(I)
şeklinde özel bir fonksiyon tanımlanır ve bu fonksiyon yardımıyla çizdiğimiz H(I)’e karşı I
grafiğinden elde edilen doğrunun eğiminden seri direnci, H(I) ekseninin kesim noktasından
ve birinci Cheung fonksiyonundan elde edilen idealite faktörü değeri kullanılarak engel
yüksekliği tez yazarı ve gözlemci tarafından hesaplandı (Şekil 5.8-5.9). Elde edilen bu
değerler 0.00, 1.00, 3.00, 5.00, 7.00 kbar basınç değerlerine karşılık sırasıyla seri direnci
için 52.739, 21.526, 27.489, 30.610, 47.845 Ω ve 52.523, 21.434, 27.326, 29.982, 47.540
Ω, engel yüksekliği için ise 0.576, 0.593, 0.610, 0.629, 0.666 eV ve 0.585, 0.597, 0.612,
0.629, 0.656 eV değerleri hesaplandı (Tablo 6.1-3).
Tablo 6.1-3’de de verilen sonuçlara bakılacak olursa başka yöntemlerle
olmaksızın farklı iki kişinin fit sonuçlarıyla hesaplanan değerler bile farklılık
göstermektedir. Bu farklılık temelde çizilen I − V grafiklerinin lineer bölgeleriyle ilgilidir,
çünkü grafiğin tamamı için tek bir idealite faktörü, engel yüksekliği ve seri direnç
hesaplaması yapılmaktadır. Bu durumda grafiği inceleyen her uzman kişinin farklı
sonuçlar hesaplaması da kaçınılmaz olmaktadır. Benzer durum birinci Cheung
fonksiyonunda dV/d(lnI)’in I’ye karşı çizilen ve ikinci Cheung fonksiyonunda H(I)’e karşı
I için çizilen grafikte de görülmektedir. Norde fonksiyonunda ise minimum noktayı
kestirmek hemen hemen olanaksızdır. Sonuçlar birbirine ne kadar yakın çıkarsa çıksın biz
deney unsurlarından kaynaklanan hataların dışındaki bu hataları hesaplama hatası olarak
adlandırabiliriz. Her nekadar veriler farklı metodlar veya başkası tarafından da
değerlendirilse değerler birbirine oldukça paralellik arzeder. Buda standart bir hata olarak
karşımıza çıkar. Geliştirilen diğer yöntemler bu hatayı dahada aza indirmek için
geliştirilmiştir. Zaten bütün ölçme ve değerlendirmelerin hatalı olduğu pozitif bilimle
97
uğraşan herkes tarafından bilinmektedir ve onun içindir ki özellikle yarıiletken malzemeler
için güvenlik aralığı (tolerans bandı) göz ardı edilemez. Güvenlik aralığı cihazlarda EN, %,
m gibi notasyonlarla ifade edilmektedir, bu semboller ölçmedeki şüpheli aralığı yada
başka bir ifadeyle ölçülemeyen hataları gösterir.
Tablo 6.1. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen idealite faktörü değerleri
Basınç (kbar)
Tez Yazarı n (I-V)
Gözlemci n (I-V)
Pozitif ve Negatif Beslem
Eğrilerinin Fiti n (I-V)
Missous n (I-V)
Birinci Cheng Fonksiyonu
Tez Yazarı n (dV/d(lnI)-I)
Birinci Cheng Fonksiyonu
Gözlemci n (dV/d(lnI)-I)
0.00
1.140
1.130
1.00
1.060
1.079
3.00
1.044
1.102
5.00
1.028
1.104
7.00
1.021
1.076
1.269
1.227
1.230
1.210
1.197
1.104
1.088
1.084
1.081
1.080
1.072
1.091
1.100
1.101
1.107
1.089
1.085
1.097
1.101
1.090
Tablo 6.2. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen engel yüksekliği değerleri
Basınç (kbar)
Tez yazarı φb (I-V)
0.00
0.588
1.00
0.602
3.00
0.621
5.00
0.641
7.00
0.660
Gözlemci φb (I-V)
0.585
0.598
0.614
0.632
0.652
Pozitif ve Negatif Beslem
Eğrilerinin Fiti φb (I-V)
0.574
0.584
0.601
0.621
0.639
Missous φb (I-V)
0.587
0.593
0.611
0.628
0.646
Norde Fonksiyonu
φb (F(V)-V)
0.594
0.614
0.627
0.647
0.667
İkinci Cheng Fonksiyonu
Tez Yazarı φb (H(I)-I )
0.576
0.593
0.610
0.629
0.666
İkinci Cheng Fonksiyonu
Gözlemci φb (H(I)-I )
0.585
0.597
0.612
0.629
0.656
98
Tablo 6.3. Mn/n-tipi GaAs Schottky diyotunun uygulanan basınç değerleri için I-V
karakterizasyonundan elde edilen seri direnç değerleri
Basınç (kbar)
Norde Fonksiyonu
Rs (F(V)-V)
0.00
1.00
3.00
5.00
7.00
44.986
22.920
30.583
30.986
48.571
Birinci Cheng Fonksiyonu
Tez Yazarı R s (dV/d(lnI)-I)
53.448
21.050
27.037
30.587
47.405
Birinci Cheng Fonksiyonu
Gözlemci R s (dV/d(lnI)-I)
52.403
21.206
27.106
30.587
47.775
İkinci Cheng Fonksiyonu
Tez Yazarı R s (H(I)-I )
52.739
21.526
27.489
30.610
47.845
İkinci Cheng Fonksiyonu
Gözlemci R s (H(I)-I )
52.523
21.434
27.326
29.982
47.540
Tablo 6.2 verilen sonuçlara göre Mn/n-GaAs Schottky diyodunda incelediğimiz
tüm yöntemlerle tüm basınç aralığında engel yüksekliklerinin düzgün olarak arttığından,
Mn/n-GaAs Schottky diyodunun basınç sensörü olarak kullanılabilirliğini göstermektedir.
Oda basıncında alınan verinin düz beslem bölgesinde diğer basınç ölçümlerine
göre seri direnç bölgesindeki anormal değişim diyodun yağ ortamı içerisinde uygun kontak
sağlanamamasından kaynaklanmıştır. Bunun için ilk değerden sonraki seri direnç değerler
bizim için daha kabul edilir değerlerdir. Eğer bu durum gözönünde bulundurulursa artan
basınçla sırasıyla engel yüksekliğinin basınçla lineeer arttığı, idealite faktörünüm düzgün
değişim göstermediğini ve seri direncinde arttığı gözlenmiştir. Engel yükseklinin basınçla
değişimi 10.11 meV/kbar yasak enerji aralığının değişimi ise 10.70 meV/kbar (Wolford
and Bradley, 1985) olup birbirlerine yaklaşık eşittir (Şekil 6.1). Böylece Fermi Seviyesi
iletkenlik bandının maksimumuna mıhlandığını söyleyebiliriz.
80.00
80.00
Mn/n-GaAs
T=300 K
60.00
60.00
40.00
40.00
Engel Yüksekliği
20.00
Engel Yüksekliği Fiti
20.00
Yasak Enerji Aralığı
0.00
0.00
2.00
4.00
6.00
0.00
8.00
Yasak Enerji Aralığının Değişimi (meV)
Engel Yüksekliğinin Değişimi (meV)
99
Basınç (kbar)
Şekil 6.1 Basınç ile Mn/n-tipi GaAs Schottky diyotunun Engel Yüksekliğinin ve GaAs’ın
Yasak Enerji Aralığının Değişim grafiği
I − V grafikleriyle ilgili olan problemlere benzer durumlar bilim dünyasında
sıklıkla karşılaşılan problemlerdendir. Hesaplamada ki problemlerden de önemlisi
hidrostatik basınç altındaki incelemelerin tamamı TE teorisi ile incelenmiş ve sonuçlarında
hidrostatik basınca uygun olduğu ifade edilmiştir. Yani basınç parametresini içeren
herhangi bir akım iletim bağıntısı bulunmamaktadır.
Pozitif bilimlerde sonuçları bilinen fakat bir denklemle bugüne kadar ifade
edilememiş oldukça fazla problem vardır. Bu bilimlerin başında da elektronik ve aktif
devre elemanları gelmektedir. Termoiyonik Emisyon teorisinde basınç parametresi
bulunmadığından çalışmamızda yapay sinir ağı ve bulanık mantığın birleşimi olan
uyarlamalı bulanık sinir ağı (ANFIS) kullanılmıştır. ANFIS uygulama da uzmanlık
gerektiren bir yazılımdır, az da olsa istenilen yada beklenilen sonuçları vermez. ANFIS
giriş ve çıkış değerleri bilinen problemleri önce yapay sinir ağlarıyla öğrenir ve bulanık
mantıkla kurallar dizisi haline dönüştürür yani algoritma oluşturup optimize eder. Burada
dikkat edilmesi ve unutulmaması gereken en önemli nokta ANFIS bu algoritmayı
oluştururken kesinlikle deneysel sonuçlardan az da olsa uzaklaşır, burada uzaklaşma
100
ölçüsünü konuyla ilgili uzman belirler. ANFIS ’in bir başka avantajı da deneysel bütünlüğü
sağlamasıdır, Çünkü deney yapılması gereken sonsuz nokta vardır ve bu noktaların tamamı
için deney yapmak imkansızdır. ANFIS kurduğu doğru algoritma ile deney aralığında ki
sonsuz noktalar için çıkış değeri üretir ki buda karakterizasyonun deney aralığında tam
olarak yapılmasına olanak sağlar.
Çalışmamızda ki deneysel sonuçları ANFIS’e uygularken sistemi daha çok
bilgilendirmek için 5 farklı basınçta 640x3 matris şeklinde deneysel verilerin tamamı
kullanılmıştır. ANFIS uygulaması için yaptığımız programda Sugeno tip FIS tek çıkışlı
sistemin üyelik fonksiyon parametrelerini belirlemek için hibrid (hybrid) öğrenme
algoriması kullandık. LSE ve BGD metodunun birleşiminden oluşan hibrid öğrenme
algoritmasında, 42 tane doğrusal, 27 tane doğrusal olmayan toplam 69 değişken
kullanılarak ve 14 tane bulanık kural program yardımıyla ANFIS tarafından oluşturuldu,
deneme yanılma yöntemiyle girişler için iki, çıkış için yedi üyelik derecesi ve Gbellmf
üyelik fonksiyonuyla en doğru sonuçlar elde edildi.
Deneysel sonuçlarla ANFIS eğitimi sonuçları alınmış üstüste gösterilmiş (Şekil
5.10-14), aynı program içerisinde oluşturulan 14 kurala göre ara basınç değerleri olan ve
deneysel sonuçları bilinmeyen 0.5 kbar,1.5 kbar, 2.0 kbar, 4.0 kbar ve 6.0 kbar da gerilim
değerleri ile birlikte yapılan programla aynı anda istenmiş ve sonuçlar elde edilmiştir. Elde
edilen bu sonuçlarla deneysel sonuçların ANFIS eğitimi sonucunda elde edilen sonuçları
birlikte gösterilmiştir (Şekil 5.15-19). Bu grafiklere baktığımızda deneyi yapılmış olan
0.00, 1.00, 3.00, 5.00, 7.00 kbar basınç değerleri için sonuçların ANFIS sonuçlarıylarıyla
hemen hemen aynı olduğunu, pozitif ve negatif beslemde lineer bölgelerinin çakıştığını ve
buna bağlı olarak y eksenindeki kesim noktalarının aynı olduğunu, ANFIS ürettiği
parametrelerle ve oluşturduğu kurallarla çizilen grafiklerden TE teorisi kullanılarak
yapılacak hesaplamaların aynı olduğunu söyleyebiliriz. Ayrıca basınç arttıkça ANFIS
grafiklerinin doğrululuğunun artmasıda bir başka dikkat çekici husustur.
Deneysel verileri alınmış basınç değerleri için doğru sonuçlar veren programda
deneysel verileri alınmamış ara değerler içinde grafikler beklenen biçimdedir (Şekil 5.1519). Bu durumda 0.00-7.00 kbar aralığında Mn/n-GaAs Schottky diyodu için tam bir
101
karakterizasyon sağlanmıştır. Böylece istenilen basınç değeri için ANFIS yardımı ile I − V
grafiği elde edilebilir.
Çalışmamızda Mn/n-GaAs Schottky diyodu klasik bilinen yöntemler dışında son
yılların en popüler konusu olan ANFIS ile belli aralıklarda basınç, gerilim ve akım
deneysel verileri kullanarak tüm deney aralığında tam karakterizasyon ilkkez elde
edilmiştir. Malzeme tasarımcıları katkı oranı, nem, üretim teknikleri vb. gibi farklı
durumlar için her seferinde deney yapmak yerine yapılmış deney sonuçlarıyla bir veri
tabanı oluşturup bu verileri bizim basınç için tahmin ettirdiğimiz gibi tahmin ettirebilirler.
Şüphesiz bu bir uzmanlık deneyim ve beraberinde ekip çalışmasını gerektirecektir. Sabırla
bütün olasılıkları kullanarak deneylerin sonucuna bir simülatörle deney yapmadan
ulaşabilecektir.
Çalışmamız
bu
yöndeki
çalışmaları
teşvik
edecek,
malzeme
tasarımcılarının işini biraz olsun kolaylaştıracaktır. Böylece fabrikasyon masraflarından
tasarruf sağlanacak, istenen engel yüksekliğinde ve kalitede malzeme üretilebilecektir.
102
KAYNAKLAR
ABIYEV, R., JULY 2003. Recurrent Neural Network Based Fuzzy Inference System for
Identification and Control Of
Dinamic System, International Journal on
Computational Intelligence (TAIN 2003), pp.31-39.
ALLER, I., LANG, C., SCWEEGER, G., HARTNAGEL, H.L., DOLT, R. and
HOHENBERG, G., 1996. GaAs Piezo-Transistör for Dynamic Pressure
Measurements at High Tempreture. Appl. Phys. Lett., 96(3), 403-405.
ANDREWS, J.M and PHILIPS, J.C. , 1975. Chemical Bonding and Structure of Metal
Semiconductor Interface. Phys. Rev. Lett., 35, 56-59.
AUBRY, V. and MEYER, F., 1994. Schottky Diode with High Series
Resistance:Limitations of Forward I-V Methods. J.Appl.Phys., 76, 7973-7984.
BACCARANI, G., 1976. Current Transport in Schottky-Barrier Diodes. J.Appl. Phys.,76,
4122-4126.
BALASUBRAMANYAM, N. and KUMAR, V., 1987. Pressure Dependence of Barrier
Heights of Schottky Contacts on Silicon. Phys. Stat. Sol.(a), 101, K29-K32i.
BARDEEN, J., 1947. Surface State and Rectification at a Metal-Sem. Contact.
Phys.Rev.,71 , 717-727.
BARDI,J., BINGGELI, N. and BALDERESCHI, A., 1996-II. Pressure and AlloyComposition Dependence of Al / Ga1− X Al X As 100 Schottky Barriers. Phys. Rev.
Lett. B, 54, R11102-R111050.
BİBER, M., 2005. Low-temperature current-voltage characteristics of MIS Cu/n-GaAs
and inhomogeneus Cu/n-GaAs Schottky diodes. Physica B, 325, 138-148.
BOHLIN, K.E., 1986. Generalized Norde Plot Including Determination of the Ideality
Factor. J. Appl. Phys., 60, 1223.
BOSSLEY, K.M., 1997. Neuro-Fuzzy Approaches in System Identification University of
Southampton, Faculty of Engineering and Applied Sciense, Electronics and
Computer Science Department, Doctor of Philosophy Thesis, England.
CHANG, C. Y., FANG, Y.K. and SZE, S.M., 1971. Specific contact resistance of MetalSemiconductor barrier. Solid State Electronics., 14, 541-550.
CHEN, S. and BILLINGS, S. A., 1992. Neural Networks for Nonlinear Dynamic System
Modeling and identification, intemational J. Control, 2, 319-346.
103
CHEN, T.P., LEE, T.C., LING, C.C.,BELLING, C.D. and FUNG, S., 1993. Current
Transport and Its Effect on the Determination of the SBH in a typical System. Solid
State Electron., 36, 949-94.
CHEUNG, S.K and CHEUNG, N.W., 1986. Extraction of Schottky diode parameters
from forward current–voltage characteristics. J. Appl. Phys., Let., 49, 85-87.
CIBILS, R.M. and BUITRAGO, R., 1985. Forvard I-V plot for nonideal Schottky diodes
with high series resistance. J. Appl. Phys., 58, 1075-1077.
CROWELL, C.R. and SZE, S.M., 1965. Surface States and Barrier Height MetalSemiconductor System. J. Appl. Phys., 36, 3212-3220.
CROWELL, C.R and SZE, S.M., 1966. Current transport in Metal-Semiconductor
Barriers. Solid State Electron., 9, 1035-1048.
CRUMBACKER, T.E., SITES, J.R. and SPAIN, I.L., 1989. Effects of high pressure on
silicon metal-oxide- semiconductor structures. J. Appl. Phys., 65, 2328-2331.
ÇANKAYA, G., 1998. Au/n-GaAs Schottky diyotların karakteristik parametreleri üzerine
hidrostatik basıncın etkisi. Yüksek Lisans Tezi, Atatürk Üniversitesi, (Yayınlanmış)
42 Sayfa.
ÇANKAYA, G., UÇAR, N., AYYILDIZ, E., EFEOĞLU, H., TÜRÜT, A.,
TÜZEMEN, S, and YOĞUTÇU, Y.K., 1999-I. Effect of hydrostatic pressure on
the characteristics parameters of Au/n-GaAs Schottky-barrier diodes. Phys. Rev. B,
60, 15944-15947.
ÇANKAYA, G., UÇAR, N. and TÜRÜT, A., 2000a. Reverse Bias Capacitance-Voltage
Characteristic of Au/n-GaAs Schottky Diodes under Hydrostatic Pressure. Int. J.
Electron., 87, 1171-1176.
ÇANKAYA, G., UÇAR, N. and TÜRÜT, A., 2000b. An Investigation of I-V
Characteristics of Au/n-GaAs Schottky diodes after hydrostatic pressur. Phys. Stat.
Sol. (a), 179, 469-473.
ÇANKAYA, G. and UÇAR, N., 2002a. Forward Bias Capacitance-Voltage Characteristic
and Interface State Density of Au/n-GaAs Schottky Diodes under Hydrostatic
Pressure. Physica Scripta, 65, 454-458.
ÇANKAYA, G., 2003. Hidrostatik Basınç Altında Metal/p-Si Schottky Diyotların
Elektriksel karakterizasyonu. Doktora Tezi, Atatürk Üniversitesi. 84 Sayfa.
ÇANKAYA, G. and ABAY, B., 2005. Current- and capacitance-voltage characteristics of
Cd/p-GaTe Schottky barrier diodes under hydrostatic pressure. Semicond. Sci.
Technol. 21, 124–130.
104
DABROWSKI, J. and SCHEFFER, M., 1988. Theoretical Evidence for an Optical
Inducible Structural Transition of the isolated As Antisite in GaAs: Identification
and Explanation of EL2?. Phys. Rev. Lett., 60, 2183-2186.
DANG, Z., 2004. Extended Neuro-Fuzzy Models Of Multilayer Perceptrons, Fuzzy Sets
and Systems 142, 221–242.
DEMUTH, H., BEALE, M. and HAGAN, M. T., 1995. Neural Network Design,
Wadsworth Publishing Company Pub.
DIZHUR, E.M., SHULMAN, A.Y., KOTELNIKOV, I.N. and VORONOVSKY, A.N.,
2001. Pressure Dependence of the Barrier Heights in Tunnel n-GaAs/Au Junction.
Phys. Stat. Sol.(b),223, 129-137.
DOBACZEWSKI, L. and LANGER, J.M., 1993. Pressure Dependence of the Schottky
Barrier Heights in Al/AlGaAs Junctions. Acta Phys. Pol. A, 84,741-744.
DONOVAL, D., DE SOUAS PIRES, J., TOVE, P.A and HARMAN, R., 1989. A self
consistent approach to I-V measurements on rectifying Metal- Semiconductor
contacts. Solid State Electron., 32, 961-964.
EVANGELOU, E.K., PAPADIMITRIOU, L., DIMITRIADES, C.A. and
GIAKOUMAKIS, G.E., 1993. Extraction of Schottky Diode Parameters from I-V
Characteristics. Solid State Electron., 36, 1633-1635.
FAUSSETT, L., 1994. Fundamentals of Neural Networks Architectures, Algorithms, and
Applications, Prentice-Hall.
FRYE, R.C., RIETMAN, E. and WONG, C.C., 1991. Back-Propogation Learning and
Nonidealities in Analog Neural Network Hardware. IEEE Transactions on Neural
Networks, 2, (1), 110-117.
GIANNAKIS G.B. and MENDEL J.M., 1989. Identification of Non-Minimum Phase
Systems Using Higher-Order Statistics, IEEE Trans. Acoust., Speech, Signal
Processıng, 37, 360-377.
GWOREK C.S., PHATAK P., JONKER B.T., WEBER E.R. and NEWMAN N.,
2001. Pressure dependence of Cu, Ag, and Fe/n-GaAs Schottky barrier heights.
Phys. Rev. B, 66, 045322-1-045322-6.
JACCEH, M., 2003. Neuro-Fuzzy System With Learning Tolerant To Imprecision, Fuzzy
Sets and Systems 138, 427–439.
EKSİN İ. and..EROL O. K., 2000 A Fuzzy Identification Method for Nonlinear Systems.
Turk. J. Elec. Engin., 8, , 125-135.
105
JIT, S. and NARASIMHA, MURTY NETI, V.L., 2006. Analytical study of the photoeffects on common-source and common-drain microwave oscillators using high
pinc-off n-GaAs MESFETs. Microelectronics Journal, 37, 452-458.
JOGLE, V., 2004. Artificial Neural Networks and Neuro-Fuzzy Systems for Modelling
and Controlling Real Systems, A Comparative Study, Engineering Applications of
Artificial Intelligence, 17, 265–273.
KARATAŞ, Ş. and ALTINDAL, Ş.,2005a. Temperature dependence of barrier heights of
Au/n-type GaAs Schottky diodes. Solid-State Electronics, 49, 1052-1054.
KARATAŞ, Ş. and ALTINDAL, Ş., 2004. Ideal Olmayan Schottky Diyotlarının Temel
Parametrelerinin Akım-Voltaj Karakteristiklerinden belirlenmesi. KSU. Journal of
Science and Engineering, 7(2).20-25
KARATAŞ, Ş. and ALTINDAL, Ş., 2005b. Zn/p-Si Schottky Diyotlarda Temel
Elektriksel Parametrelerin Sıcaklığa Bağlı Incelenmesi. KSU. Journal of Science
and Engineering, 8(1) 26-30
KARATAŞ, Ş. and TÜRÜT, A., 2006. The determination of electronics and interface
state density distributions of Au/n-type GaAs Schottky barrier diodes. Physica B,
381, 199-203.
KARATAŞ, Ş., TÜRÜT, A. and ALTINDAL, Ş., 2005. Effects of 60Co γ-ray irradition
on the electrical characteristics of Au/n-GaAs (MS) structures.NIM- A,555, 260265.
KOSKO, B., 1994. Neural Networks for Signal Processing Prentice Hall, Englewood
Cliffs, NJ 07632, 1992.
LEE, T.C., FUNG, S.,BELLING, C.D. and AU, H.L., 1992. A systematic approach to
the measurement of ideality factor, series resistance, and barrier height for SBD’s.
J. Appl, phys., 72, 4739-4742.
LEE, J. AND MATHEWS, V.J., 1994. A Stability Condition for Certain Bilinear
Systems, IEEE Trans. on Signal Processing, 42, 1871-1873.
LIN, Y., and CUNNINGHAM, G., 1995. A New Approach to Fuzzy-Neural System
Modelling, IEEE Transactions on Fuzzy Systemsa, 3, (2), 190-198.
LIN, C.T. and LU, Y.C., 1995. A Neural Fuzzy System with Linguistic Teaching Signals.
IEEE Transactions on Fuzzy Systems, 3, (2), 169-189.
LOUIE, S.G and COHEN, M.L., 1976. Electronic Structure of a Metal-Semiconductor
Interface. Phys. Rev. B, 13, 2461-2469.
106
MARSEQUERA, M., 2004. Model Identification
by Neuro-Fuzzy Techniques:
Predicting The Water Level In A Steam Generator of a pwr. Progress in Nuclear
Energy, 44, (3), 237-252.
MISSOUS, M., RHODERICK E.H. and SINGER K.E., 1985. Thermal Stability of
Epitaxial Al/GaAs Schottky Barriers Prepared by Moleculer-Beam Epitaxy. J.
Appl. Phys., 59(9), 3189-3195.
MEAD, C.A., 1966. Schottky Barrier Gate Field-Effect Transistör. Proc. IEEE, 54, 307308.
MÖNCH, W., 1995. Semiconductor Surfaces and Interfaces, 2nd Edition. Springer,
Berlin, P.75-92, P.347-387, Table A.4.
NARENDRA, K.S. and MUKHOPADHYAY, S., 1997. Adaptive Control Using Neural
Networks and Approximate Models, IEEE Trans. on Neural Networks, 8, 475-485.
NAUCK, D., 1995. Beyond Neuro-Fuzzy Perspectives and Directions.Proc. Third
European Congress on Intelligent Technigues and Soft Computing, 1159-1164,
Aachen.
NAUCK, D. and KLAWONN.F., 1996. Neuro-Fuzzy Classification Initialized by Fuzzy
Clusterig.Proc. Fourth European Congress on Intelligent Tecnigues and Soft
Computing, Aachen.
NAUCK, D., LAWONN. F. and KRUSE, R., 1992. Fuzzy Sets, Fuzzy Controllers, and
Neural Networks, Journal of the Humboldt-University of Berlin, Series Medicine
41.
NAUCK, D., and KRUSE, R., 1994. Choosing Appropriate Neuro-Fuzzy Models. In
Proc. Second European Congress on Fuzzy and Intelligent Technologies
(EUFIT94), 552-557.
NORDE, H., 1979. A modified forward I-V plot for Schottky diodes with high series
resistance. J. Appl. Phys., 50, 5052-5053.
PEANASKY, M.J. and DRICKAMER, H.G., 1984. Effect of pressure, on the height of
the Schottky barrier ( φB ) for several semiconductor. J. Appl. Phys., 56, 3471-3475.
PERROT, M.H., and COHEN, R.J., 1996. An Efficiant Approach to ARMA Modelling
of Biolagical Systems with Multiple Inputs and Delays. IEEE Transactions on
Biomedical Engineering, 43, (1), 1-14.
PHATAK, P., NEWMAN, N., DRESZER, P. and WEBER, E.R., 1995-II.
Experimental determination of the pressure dependence of the barrier height of
107
metal/ [ n − type GaAs ] Schottky contacts: A critical test of Schottky-barrier models.
Phys. Rev. B, 51, 18003-18006.
RAUF, F., 1993. Nonlinear Adaptive Filtering: A Unified Approach, Ph.D. Thesis, Boston
University, Boston.
RHODERICK, E.H., FRENSLEY, W.R and SHAN, M.P., 1993. Handbook on
Semiconductors Volume 4., Properties of Junctions and Barriers Chapter 1,
Elsevier Science Publication, P.1-96.
RHODERICK, E.H. and WILLIAMS, R.H., 1998. Metal-Semiconductor Contacts,
Clarendon Pres, Oxford, P.1-144, Appendix C.
ROSS, T.J., 1995. Fuzzy Logic with Engineering Applications, Mc.Graw-Hill Publishing
Co., New York.
SALEHI, A., NIKFARJAM, A. and KALANTARI D.J., 2006. Pd/porous-GaAs
Schottky contact for hydrogen sensing application.Sensor and Actuators B, 113,
419-427.
SALEHI, A. and NIKFARJAM, A., 2004. Room temperature carbon monoxide sensor
using ITO/n-GaAs Schottky contact. Sensor and Actuators B, 101, 394-400.
SATO, K and YASAMURA, Y., 1985. Study of Forward I-V Plot for Schottky Diodes
with Series Resistance. J. Appl. Phys., 58(3), 3655.
SCHMID, P.E., 1985. Silicide-silicon Schottky barriers. Helvetica Physica Acta, 58, 371382.
SHAN, W., LI, M.F., YU, P.Y.,HANSEN, W.L. and WALUKIEWICZ, W., 1988.
Pressure Dependence of Schottky Barrier height at the Pt/GaAs interface. Appl.
Phys. Lett. , 53, 974-976.
SHEN, T.H. and MATTHAI, C.C., 1991. Pressure dependence of the Schottky barrier
height at the nickel-silicide/silicon interface. J. Phys.:Condens. Matter., 3, 613-615.
SINGH, J., 2001. Semiconductor Devices: Basic Principles, John-Wiley.
JUDİTSKY, A. HJALMARSSON, H. BENVESTIVE, A. DELYON, B. LJUNG, L.
SJÖBERG, J. and ZHANG Q, 1995. Nonlinear black-box modelling in system
identification: mathematical foundations, Automatica, 31
SZE, S.M., COLEMAN, D.J. and LOYA, A., 1971. Current transport in MetalSemiconductor-Metal (MSM) structure. Solid State. Electron., 14, 1209-1218.
108
VAN SCHILFGAARDE, M., WEBER, E.R and NEWMAN, N., 1994. Pressure
Dependence of III-V Schottky Barriers: A Critical Test of Theories for Fermi Level
Pinning. Phys. Rev. Lett., 73, 581-584.
TANEVA, A. and GEORGIEVA M., 2003. Neuro-fuzzy Model: Used For Identification
and Predictive Controller Design in Matlab, Technical University of Sofia.
TSORMPATZOGLOU, A., TASSIS, D.H., DIMITRIADIS, C.A, KAMARINOS, G.,
FRIGERI, P., FRANCHI, S., GOMBIA, E. and MOSCA, R., 2006. Noise
spectroscopy of localized states in Au/n-GaAs Schottky diodes containing InAs
quantum dots. Solid-State Electronics, 50, 340-344.
WEITERING, H.H., SULLIVAN, J.P., CAROLISSEN, R.J., SANDOZ, R.P.,
GRAHAM, W.R. and TUNG, R.T., 1996. Inhomogeneous Schottky barriers at
Ag/Si(111) and Ag/Si(100) interface. J. Appl. Phys., 79, 7820-7828.
YANG, Z.J. and S., TSUJI, T., 1997. System Impulse Response Identification Using a
Multiresolution Neural Network, Automatica, 33, 1345-1350.
YU, P.Y. and CARDONA M., 2001. Fundamentals of Semiconductors. 3rd Edition,
Springer-Verlag, Berlin. P. 17-100.
ZADEH, L.A., 1962. From Circuit Theory to System Theory, Proc, IRE, 50, 856-865.
ZAINABIDINOV, S.Z., BARANSKIY, P.I., KARIMOV, I.N., TURAEV, A.R. and
KARIMBERDIEV, KH.KH., 1995. Effect of High Pressure on the Electrical
Properties of Doped Silicon Crystals and Devices Based on them. Solid State.
Electron., 38, 693-695.
ZHANG, J., and MORRIS, A.J., NOVEMBER, 1995. Fuzzy Neural Network for
Nonlinear System Modelling. IEEE Proceedings, Control Theory Applications, 42,
(6), 551-561.
ZIEL, A.V., 1968. Solid State Physical Electronics, Prentice-Hall, Inc., New-Jersey, P.97245.
ÖZGEÇMİŞ
1975 yılında Ankara doğdu. İlk ve orta öğrenimini de Ankara’da tamamladı. 1993
yılında Erciyes Üniversitesi Mühendislik Fakültesi Elektronik Mühendisliği bölümüne
kayıt yaptırdı. 1999 yılında Elektronik Mühendisi ünvanını aldı. 2005 yılında
Gaziosmanpaşa Üniversitesi Fen Bilimleri Enstitüsü Fizik Anabilim dalında Yüksek
Lisans eğitimine başladı. Halen aynı anabilim dalında akademik çalışmalarına devam
etmektedir.
© Copyright 2026 Paperzz