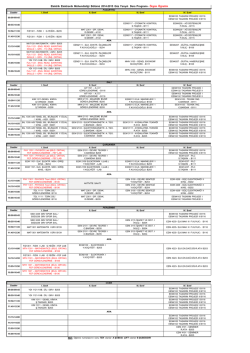
MÜHENDİSLİK-MİMARLIK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSİLİĞİ BÖLÜMÜ OTOMATİK KONTROL SİSTEMLERİ SÜREKLİ HAL HATALARI DERSİN HOCASI: PROF. DR. HASAN RIZA ÖZÇALIK 9.5.2014 SAMİ ŞİT_EEM 1 SÜREKLİ HAL HATALARI Kontrol sisteminde amaç; sürekli hal hatasını sıfır yapmak veya çok küçük hale getirmektir. Sıfır olma durumuna mükemmel durum, küçük olma durumuna ise iyi durum denir. 9.5.2014 SAMİ ŞİT_EEM 2 9.5.2014 SAMİ ŞİT_EEM 3 9.5.2014 SAMİ ŞİT_EEM 4 SÜREKLİ HAL HATASI Şekil 1.2 9.5.2014 SAMİ ŞİT_EEM 5 1. Konum(Pozisyon) Hata Katsayısı(Kp) Sistemin Birim Basamak için ortaya koyduğu hatadır. Birim basamak giriş sabit konumu temsil eder ve kontrol sistemin sabit bir hedefin konumunu belirleme yeteneğini tanımlar. Sistemin ulaşması istenilen nihai konum basamak giriştir. 9.5.2014 SAMİ ŞİT_EEM 6 Şekil 1.3 9.5.2014 SAMİ ŞİT_EEM 7 2. Hız Hata Katsayısı(Kv) Sistemin Birim Rampa giriş için oluşturduğu hatadır. Rampa Giriş sabit hızı temsil eder ve kontrol sisteminin doğrusal olarak artan girişi izleyebilme yeteneğini tanımlar. 9.5.2014 SAMİ ŞİT_EEM 8 Şekil 1.4 9.5.2014 SAMİ ŞİT_EEM 9 3. İvme Hata Katsayısı(Ka) Sistemin Birim Parabolik giriş için oluşturduğu hatadır. Parabolik Giriş sabit ivmeyi temsil eder ve kontrol sisteminin hızlanan hedefleri izleyebilme yeteneğini tanımlar. 9.5.2014 SAMİ ŞİT_EEM 10 Şekil 1.5 9.5.2014 SAMİ ŞİT_EEM 11 ÖZETLERSEK Sürekli hal hatası performans özelliklerine “statik hata sabitleri” olarak adlandırılır. H(s) H(s) 1 1 Kp H(s) 9.5.2014 SAMİ ŞİT_EEM 1 Kv 1 Ka 12 ÖRNEKLER: 9.5.2014 SAMİ ŞİT_EEM 13 9.5.2014 SAMİ ŞİT_EEM 14 9.5.2014 SAMİ ŞİT_EEM 15 9.5.2014 SAMİ ŞİT_EEM 16 Örnek: Şekildeki her bir sistem için statik hata sabitlerini ve beklenen hataları standart basamak, rampa ve parabolik giriş fonksiyonları için bulunuz? 9.5.2014 SAMİ ŞİT_EEM 17 Çözüm: Sistemlerin kararlı olduğu kabul ediliyor. Öncelikle şekil (a) için statik hata sabitlerini belirleyelim. 9.5.2014 SAMİ ŞİT_EEM 18 Şekil (b) için statik hata sabitlerini belirleyelim. 9.5.2014 SAMİ ŞİT_EEM 19 Şekil (c) için statik hata sabitlerini belirleyelim. 9.5.2014 SAMİ ŞİT_EEM 20 4. Sistem Tipi Şekil 1.6 9.5.2014 SAMİ ŞİT_EEM 21 Tablo 1.1 9.5.2014 SAMİ ŞİT_EEM 22 Hata Sabiti Analizinde Dikkat Edilecek Noktalar: 9.5.2014 SAMİ ŞİT_EEM 23 ÖRNEK 1: 9.5.2014 SAMİ ŞİT_EEM 24 ÖRNEK 2: 9.5.2014 SAMİ ŞİT_EEM 25 ÖRNEK 3: 9.5.2014 SAMİ ŞİT_EEM 26 ÖRNEK 4: 9.5.2014 SAMİ ŞİT_EEM 27 9.5.2014 SAMİ ŞİT_EEM 28 9.5.2014 SAMİ ŞİT_EEM 29 9.5.2014 SAMİ ŞİT_EEM 30 9.5.2014 SAMİ ŞİT_EEM 31 9.5.2014 SAMİ ŞİT_EEM 32 KAYNAKÇA 1. Otomatik Kontrol Sistemleri Ders Notları, KSÜ, (Prof. Dr. Hasan Rıza ÖZÇALIK) 2. Otomatik Kontrol Ders Notları, Erciyes Üniversitesi (Yrd. Doç. Dr. Aytekin BAĞIŞ) 3. Otomatik Kontrol, Sürekli Hal Hataları (Prof.Dr.Galip CANSEVER) http://www.yildiz.edu.tr/~cansever/oto/D1.pdf 4. 7. Bölüm, Sürekli Hal Hataları( Yıldız Üniversitesi) http://www.yildiz.edu.tr/~nengin/surekli_hal_hatalari.pdf 5. 7. Bölüm, Kontrol Sistemlerinin Zaman Tanım Bölgesi Analizi(Uludağ Üniversitesi) http://metinh.home.uludag.edu.tr/kontrol/zaman_cevab%C4%B1_1.pdf 9.5.2014 SAMİ ŞİT_EEM 33
© Copyright 2026 Paperzz