OTEKON’14
7. Otomotiv Teknolojileri Kongresi
26 – 27 Mayıs 2014, BURSA
ABS Fren Dinamiğine Yönelik Çoklu Model Geçişli Doğrusal Parametreleri
Değişken Kontrolcü AlgoritmalarınınTasarımı
S.Çağlar Başlamışlı
Hacettepe Üniversitesi, Mühendislik Fakültesi, Makine Müh. Böl. 06800 Beytepe Ankara
ÖZET
Bu çalışmanın konusu elektromekanik fren sistemine sahip binek taşıtlara yönelik, yenilikçi, sürüş ve yol şartlarına
göre uyarlanabilir, yüksek performanslı ABS (Antiblokaj Fren Sistemi) kontrol algoritmalarının tasarımıdır. Kontrolcü
mimarisi olarak Doğrusal Parametreleri Değişken (DPD) tipi kontrolcüler çoklu model geçişli bir altyapı içerisine
yerleştirilmiş ve farklı yol şartları altında farklı kontrolcüler arası kararlı geçişlerin yapılmasını garantileyen kararlılık
koşulları doğrusal matris eşitsizliklerinin çözümüyle elde edilmiştir. Benzetim sonuçları teklif edilen kontrolcü
mimarisinin ABS kontrolünde yüksek etkinliği olduğunu göstermektedir.
Anahtar kelimeler: ABS Kontrol Sistemi, Çoklu Model Geçişli Kontrol, Doğrusal Parametreleri Değişken
Sistemler,
DESIGN OF MULTIMODEL SWITCHING LINEAR PARAMETER VARYING CONTROLLERS FOR
ANTILOCK BRAKE SYSTEM
ABSTRACT
The subject of this project is the design of innovative, high performance ABS (Antilock Braking System) control
algorithms that are scheduled with road and driving conditions for passenger vehicles equipped with electromechanical
brake systems. Linear parameter varying (LPV) controllers are embedded in a multimodel switching setting and the
stable switching between different controllers under varying road conditions is guaranteed through the satisfaction of
stability conditions expressed in terms of linear matrix inequalities. Simulation results show that the proposed controller
architecture is effective in ABS control.
Keywords: ABS Control System, Multi model switching based control, Linear Parameter Varying Systems
fren basıncını ayarlayabilme potansiyeline sahiptir.
Yurdumuzda da konu ile ilgili yoğun araştırmalar
yapılmış ve özellikle Yazıcıoğlu ve Ünlüsoy [2] ayrıca
Kayacan ve çalışma arkadaşlarının [3], [4] yapmış
olduğu
çalışmalar
incelenmiştir.
Ancak
bu
araştırmacıların kullanmış oldukları kontrol yöntemleri
farklı kuramlara dayanmaktadır. Literatür özetinin bu
kısmında dayanıklı –ve özellikle kazanç uyarlamalı (gain
scheduling)- kontrol kuramı kullanılarak yapılmış
elektromekanik fren sistemi kontrolünü içeren
çalışmalara yer verilmiştir.
Petersen
[5] tarafından önerilen ABS kontrol
algoritması kazanç uyarlamalı LQR kontrol kuramının
kullanılması üzerine kuruludur. Algoritma tasarımı
çeyrek taşıt fren modeli üzerinde sınanmıştır. Bu
denklemlerde
Burckhardt
Lastik
Modelinin
doğrusal/yanal kayma ve sürtünme katsayısına göre
1. GİRİŞ
Bu makalenin konusu elektromekanik fren sistemine
sahip binek taşıtlara yönelik, yenilikçi, sürüş ve yol
şartlarına göre uyarlanabilir, yüksek performanslı ABS
(Antiblokaj Fren Sistemi) kontrol algoritmalarının
tasarımıdır. Binek taşıtlar için ilk olarak Bosch tarafından
geliştirilen ve otomotiv sektöründe 30 yıllık bir geçmişi
olan ABS fren teknolojisi panik frenleme esnasında
tekelerlek kilitlenmesini engellemekte ve taşıt
doğrusal/yanal
kararlılığını
muhafaza
edilmesini
sağlamaktadır.
Bu çalışmada teklif edilen fren sistemi algoritmaları
son 10 yıldır geliştirilmekte olan Brake by Wire
teknolojisini mümkün kılan elektromekanik fren
sistemine yönelik algoritmalardır. Bu sistem hidrolik
sistemde kullanılan fren sisteminin aksine devamlı olarak
1
uyarlanabilen bir versiyonu kullanılmıştır. Denklemler
belirli bir yüzeyde maksimum fren kuvvetinin oluşmasını
sağlayan doğrusal kayma değeri ve seçilen farklı tutunma
katsayısı ve yanal kayma değerleri etrafında
doğrusallaştırılmıştır. Elde edilen doğrusal denklemlerde
hız değişken bir parametre olarak yer almaktadır,
dolayısıyla tek değişken parametresi hız olan DPD
formunda bir sistem elde edilmiştir. Bu sistem için
kontrolcü sentezi aşamasında hızın fonksiyonu olan
Lyapunov fonksiyonları kullanılmıştır.Yapılan kararlılık
analizleri sonucunda tutunma katsayısının ve yanal
kaymanın hangi aralıklarında sistemin kararlı hale
getirilebileceği incelenmiştir ancak işletim esnasında
oluşabilecek değişken sürtünme katsayısı ve yanal kayma
durumları için sistem kararlılık analizi yapılmamıştır.
Yi ve çalışma arkadaşları [6] tarafından önerilen
ABS kontrol algoritması doğrusal olmayan durum geri
beslemeli adaptif bir kontrol yöntemi üzerine kuruludur.
Araştırmacılar dinamik bir lastik modeli olan Lugre lastik
modelini kullanmışlardır. Tasarımları esnasında lastik
modelinin durumunun ve taşıt hızının pratikte ölçmenin
mümkün olmadığını savunmuşlar ve bu iki durum için bir
durum
kestirme
(state
observer)
algoritması
tasarlamışlardır. Tasarım çeyrek taşıt fren modeli
denklemleri üzerine kurulmuştur.
Solyom [7] tarafından önerilen ABS kontrol
algoritması kazanç uyarlamalı PI ve PID kontrolcülerinin
tasarlanması üzerine kuruludur. Fren kuvvetinin doğrusal
kayma grafiğinin tepe noktasının solundaki pozitif eğimli
bölge için bir kontrolcü tepe noktasının sağ tarafındaki
negatif eğimli bölge için bir diğer kontrolcü
tasarlanmıştır. Tutunma katsayısının tahmin edilmesi
(direkt ölçüldüğü varsayılmıştır) ile en iyi doğrusal
kayma değeri tespit edilmiştir; anlık kayma değerinin
değerine göre üstte bahsi geçen iki kontrolcüden bir
tanesi çalıştırılarak boylamasına kayma durumu istenilen
değerde tutulmaya çalışılmıştır.
Corno ve çalışma arkadaşları [8] tarafından önerilen
ABS kontrol algoritması hem kazanç uyarlamasız hem
kazanç uyarlamalı
kontrolcülerinin tasarımı üzerine
kuruludur. Kazanç uyarlamalı kontrolcülerden ilkinde
kazançlar sadece hıza göre ayarlanmıştır; ikincisinde ise
hem hıza hem de boylamasına kaymaya göre
ayarlanmıştır. Diğer araştırmacıların aksine Corno ve
çalışma arkadaşları model olarak iki tekerlekli fren
modelini kullanmışlardır (motosiklet uygulaması
yaptıkları için). Kontrolcü testlerini farklı hızlarda, farklı
tutunma katsayılı yollarda ve en iyi boylamasına kayma
değerinden küçük ve büyük referans kayma değerleri için
yapmışlardır.
Bu çalışmada ABS kontrol sistemine yönelik
yenilikçi bir model çoklu geçiş tabanlı dayanıklı kontrol
algoritması geliştirimiştir. Kontrolcü tasarımı doğrusal
olmayan fren sistemi modelinden doğrusal parametreleri
değişken bir modelin elde edilmesi ile kazanç uyarlamalı
kontrolcülerin tasarlanması üzerine kurulacaktır.
2.
FREN
DİNAMİĞİNİN
OLMAYAN YAPISI
DOĞRUSAL
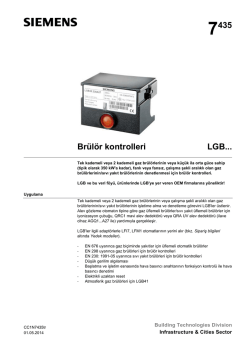
Bu çalışmadaki ABS algoritması geliştirilmesinde
kullanılan temel model Şekil 2 de verilmiş olan çeyrek
taşıt fren dinamiği modelidir:
Şekil 1. Çeyrek Taşıt Fren Dinamiği Modeli
(1)
Üstteki denklemlerde
tekerlek yarıçapını,
taşıtın çeyrek kütlesini,
tekerlek eylemsizlik
momentini ve
ABS kontrolcüsünün uyguladığı fren
torkunu temsil etmektedir. ABS kontrol sistemi
boylamasına kayma durumunun ideal boylamasına kayma
durumunu takip edilmesi ilkesine göre çalışmaktadır.
Dolayısıyla, kontrole yönelik bir modelin geliştirilmesi
açısından, boylamasına kayma durumunun denklemlerde
yer alması gerekmektedir:
(2)
Üstteki denklemler ABS kontrol probleminin
teorik/teknik
zorluklarının
anlaşılması
açısından
açıklayıcıdır. Fren dinamiği doğrusal değildir. Sistemdeki
doğrusalsızlık kaynakları çok çeşitlidir. Hız durumu ilk
denklemin paydasında yer almaktadır. Öte yandan, fren
kuvveti tekerlek kaymalarının, taşıt hızının, tekerlek
üzerindeki dik kuvvetin ve yol tutunma katsayısının
doğrusal olmayan bir fonksiyonudur ve ilk denklemde bu
kuvvetin bir sistem durumu olan
ile çarpıldığı
görülmektedir. Kontrol kanalı olan , ABS eyleyicisi
tarafından üretilmektedir ve gerçek bir uygulamada bu
eyleyicinin bir zaman sabiti (time constant) ve bir
gecikmesi bulunmaktadır (time delay). Dolayısıyla
eyleyici dinamikleri de ayrıca modellenmelidir.
2
Doğrusal Olmayan
Fren Dinamiği Modeli
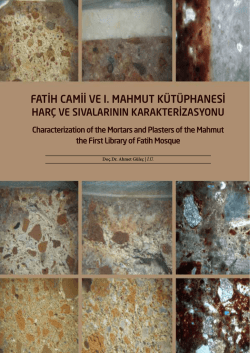
Geçiş
Mekanizması
Şekil 2 Çoklu model tabanlı dayanıklı Kontrol Şeması-2 (DPD kontrolcülerin Kullanıldığı Kontrol
Mimarisi)
Birçok
araştırmacının
tasarladığı
kontrol
algoritmalarının temelinde üstte verilmiş olan çeyret taşıt
fren dinamiği modeli bulunmaktadır. Ön tasarımlar bu
model üzerinde yapıldıktan sonra daha kapsamlı bir taşıt
modeli üzerinde simülasyon çalışmaları devam
edilmektedir. Bahsi geçen teorik/teknik zorlukların
üstesinden gelebilmek adına çalışmamızda DPD kontrol
sınıflarından algoritmalar geliştirilecektir.
Şekil 2 de Geçiş mekanizması anlık boylamasına
kayma ve hız değerlerine göre tepkileri doğrusal olmayan
fren dinamiği modelinin tepkilerine en çok yakınsayan
DPD alt kontrol sistemini belirler. Belirlenen DPD alt
kontrol sisteminin yer aldığı kontrol döngüsünde üretilen
kontrolcü sinyali
anlık olarak üretilebilecek en iyi
kontrol sinyali olarak değerlendirilir ve doğrusal olmayan
fren modeline verilir.
2 FARKLI DPD SİSTEM TANIMLARININ
AÇIKLANMASI
Tekerlek kaymasını kontrol etmek için sentezlenen
çoklu geçişli DPD kontrolcüleri tasarım adımları zorluk
derecesi artan üç adet problemin çözümü sonucu elde
edilmiştir. Problem 1: hız terimi ve sürtünme katsayısı
sabit kabul edilmiş;
tek kazanç uyarlama
parametresi olarak ele alınmıştır. Problem 2: Sürtünme
katsayısı
sabit kabul edilmiş ; ve kazanç uyarlama
parametreleri olarak ele alınmıştır. Problem 3: geçiş
parametresi olarak ele alınmış; ve kazanç uyarlama
parametreleri olarak ele alınmıştır.
Kazanç uyarlama parametrelerinin fonksiyonu olan
çıktı geri beslemeli dayanıklı kontrolcüler (output
feedback controller) tasarlanmıştır; Problem 3’ de
sürtünme katsayısının iki farklı değeri için iki adet
kontrolcü tasarlanmış, geçiş kararlılığını sağlamak için
ortak lyapunov fonksiyonu yöntemi kullanılmıştır.
Tanımlayıcı formda ifade edilmiş DPD sistemler için
genel denklemler aşağıda verilmiştir.
( ) ̇
( )
( )
( )
( )
( )
( )
( )
( )
(3)
Sistem matrislerinin sabit matrisler ve sistem
parametreler cinsinden ifadesi aşağıdaki gibidir:
( )
∑
( )
∑
(4)
vs...
3
3 PROBLEM 1
3 1 Sistem Denklemlerinin Kurulması
Öncelikle,
( )
̃
rasyonel lastik
modelinin yapısı ABS fren dinamiğine katılmıştır. Model
Pacejka lastik modelinin başarılı bir yakınsamasıdır.
Elde edilen denklemler aşağıda verilmiştir:
̃
( )
̇
(
)
,
(5)
Burada
terimi pratikte çok küçük bir değer
olduğu için ihmal edilebilir.
tanımı yapıldıktan
sonra üstteki denklem aşağıdaki gibi ifade edilir:
̇(
)
(
Şekil 3. Büyütülmüş Kontrol Sisteminin Blok
Diyagram Gösterimi
) ,
Performans ağırlığı dinamikleri
(6)
Bu denklem ayrıca aşağıdaki gibi yazılabilir:
̇
Üstte geçen
ayrıştıralabilir:
matris
,
ifadeleri
̇
(7)
aşağıdaki
gibi
,
̃
şeklindedir.Performans ağırlığının girdisi
sinyalidir. Kontrolcü performansının arttırılması için
performans ağırlığı dinamiği yüksek kazançlı bir alçak
geçirgen filtre olarak tasarlanmıştır. Üstte verilen üç ayrı
dinamik sistemin birleştirilmesi sonucunda kapalı çevrim
kontrol sistemi aşağıdaki gibi ifade edilebilmektedir:
,
,
,
̃
(11)
(8)
,
Problemi çözmek için kazanç uyarlamalı kontrolcü
parametresi
olarak seçilmiştir. Kapalı çevrim
kontrol performansını artırmak için, probleme referans
( ) ve çıkış performans
( )
frekans ağırlık
fonksiyonları
(frequency
weights)
eklenmiştir.
Büyütülmüş sistem (augmented system) verilmiştir Şekil
3 de verilmiştir. Fren Sistemi Dinamiği
̇
[
][
]
̇
(9)
(
)
şeklinde ifade edilebilir. Öte yandan Referans ağırlığı
dinamikleri
̇
̃
[
(
)
(10)
,
şeklinde ifade edilebilir. İstenilen kayma
sistemin
referansıdır. Referans ağırlığı dinamiğinin sisteme
katılmasıyla bu sinyalin belli bir bant genişliğinde sistem
etki edeceği vurgulanmaya çalışılmış, böylelike çok
yüksek bant genişlikli kontrolcülerin sentezlenmesinde
kaçınılmaya çalışılmıştır. Referans ağırlığı alçak geçirgen
filtre olarak tasarlanmıştır.
,
][
]
(12)
Üstte geçen blok matrisler için aşağıdaki tanımı
vermek mümkündür:
4
̇
̇
̇
̇
[
]
(
][
[
]
[
][
[
( )
( )
]
( )
( )
3 2 Tanımlayıcı formda ifade edilmiş DPD
sistemler için kontrolcü sentezi
(
( )
( )
( )
( )
̇
]
(18)
( )
( )
( )
̅̅̅
}
̅̅̅
̇
}
[
( )
( ) ( )
( )
( )
][
]
[
]
(19)
Teorem 3.1 uygulanarak Problem 1 için kontrolcü
sentezi yapılmıştır.
4 PROBLEM 2: SİSTEM DENKLEMLERİNİN
KURULMASI
olan tanımlayıcı formda ifade edilmiş DPD bir
sistemin için tasarlanacak ve sistem dinamiği modeli
( )
[
̇)
( )
{
̇
)
Son olarak, Z ve L matrisleri aşağıda verilmiştir:
(14)
olan ve sistem parametre vektörünün değişim
kümeleri aşağıda verilmiş:
{ ̇
]
̇
Genel denklemleri aşağıda tekrarlanmış olan
( )
( ) ( )
(17)
Bu şartların sağlanması halinde, kontrolcü matrisleri
aşağıdaki ifadelerle bulunabilir:
(13)
( ) ̇
̇)
Fren dinamiği denklemi aşağıda tekrar verilmiştir:
̇(
)
(
) ,
( )
(20)
(15)
olan geri beslemeli bir kontrolcünün tasarlanabilme
koşulları izleyen teoremde belirtilmiştir.
Bu sefer
(21)
TEOREM 3.1[1] (Tanımlayıcı formda ifade edilmiş
DPD sistemler için kontrolcü sentezi):
[
]
tanımları yapıldığında sistem dinamiği matrisleri
aşağıdaki gibi elde edilmektedir:
(16)
(
şartının sağlanması halinde, (14) denklemleriyle
ifade edilen sistemi kararlı hale getiren (15)
kontrolcüsünün varlığı aşağıda verilmiş olan şartları
sağlayan
,
,
ve
matrislerinin varlığına bağlıdır:
]
Büyütülmüş sistem matrislerinin bulunması Problem
1 in çözümündeki gibidir. Sonrasında Teorem 3.1
uygulanarak gene kontrolcü sentezi yapılmıştır.
]
(
[
(22)
̇
[
) ̇
5 PROBLEM 3: KONTROLCÜLERİN
TASARIMI
̇)
Sistem matrisleri Problem 2 deki gibi elde edilmiştir.
Büyütülmüş sistem matrislerinin bulunması Problem 1 in
çözümündeki gibidir. Ancak burada sistem matrisleri
5
önce ıslak asphalt yol sonrasında da kuru asfalt yol için
elde edilmiştir. Başka bir deyişle RM1 lastik modelinin
parametreleri once kuru ıslak yol için geçerli olan lastik
modeline sonrasında da kuru asfalt yol için geçerli olan
lastik modeline uydurulmuştur. Böylelikle iki adet ayrı
sistem elde edilmiştir.
Sonrasında Teorem 3.1 uygulanarak kontrolcü
sentezi yapılmıştır. Bu aşamada iki farklı kontrolcü ortak
( )
∑ ( )
( )
∑ ( )
ve
Lyapunov fonksiyonları olacak şekilde tasarlanmıştır.
DPD kontrolcülerin sentezi esnasında değişken
( )
parametrelerin
fonksiyonu
olan
ve
∑ ( ) ve
( )
∑ ( ) ile ifade edilen
Lyapunov fonksiyonları aranmaktadır. Parametre
kümesinin eleman sayısının artmasıyla beraber kontrolcü
sentezi esnasında çözülmesi gereken
ve
matrislerinin sayısı da artmaktadır.
Problem 1 in çözümünde tek bir parameter yer aldığı
için üstte bahsi geçen durum ortaya çıkmamaktadır.
Ancak problem 2 ve 3 te kontrolcü sentezi yapılırken
parametre kümesinde yer alan parametreler sırayla
senteze dahil edilmiş, hangi parametrelerin mutlaka göz
önünde bulundurulması gerektiği incelenmiştir. Örneğin,
( )
öncelikle bu problemlerde, öncelikle sadece
(
) gibi Lyapunov fonksiyonları ele alınmış
ve diğer parametrelerin değişimlerine sistemin
dayanıklılığı araştırılmıştır. Ancak en başarılı sonuçlar
tüm parametrelerin eklenmesi durumunda elde edilmiştir.
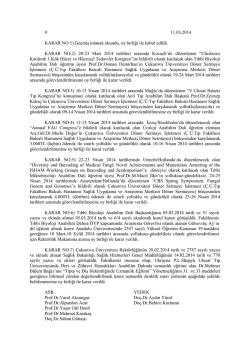
Slip LPV Problem 1
0.16
0.14
0.12
Slip()
0.1
0.08
0.06
0.04
Ref
0.02
0
LPV
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
2
Şekil 5: Boylamasına Kayma (Problem 1)
LPV Problem 1
0.025
0.02
1
0.015
0.01
0.005
6 SİMÜLASYON SONUÇLARI
0
6.1 Problem 1 Sonuçları
Problem 1 kuru asfalt yol üzerinde frenleme
simülasyonunun çözümlenmesini kapsamaktadır. Ancak
simülasyonda kullanılan boylamasına fren kuvveti modeli
mu=1 sürtünme katsayına sahip Pacejka lastik modelidir.
Simülasyon esnasında kontrolcünün performansını test
etmek amacıyla referans kayma değerine sinüs dalga
eklenmiştir. Sonuçlar Şekil 4 ve 7 arasında verilmiştir.
Sonuçlar tatminkadır.
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
2
Şekil 6: parametresinin değişimi (Problem 1)
;_ LPV Problem 1
0.15
0.1
0.05
;_1
0
̇
-0.05
Torque LPV Problem 1
1800
-0.1
1600
1400
-0.15
1200
b
T [Nm]
-0.2
0
0.2
0.4
0.6
0.8
1000
1
Time[s]
1.2
1.4
1.6
1.8
Şekil 7: parametresinin zamana göre türevinin
değişimi (Problem 1)
800
600
6 .2 Problem 2 Sonuçları
400
200
0
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
Daha fazla uyarlama parametresinin bulunduğu
Problem 2 nin sonuçları Şekil 8-11 arası verilmiştir.
Sonuçlar gene tatminkardır.
2
Şekil 4: Fren Torku Profili (Problem 1)
6
2
Torque LPV Problem 2
1
;_ LPV Problem 2
12
0.1
2500
10
0.08
8
0.06
6
̇ 0.04
2000
1500
̇
;_2
0
;_1
̇
;_3
0.5
4
0.02
2
0
b
T [Nm]
-0.5
-1
1000
1
Time[s]
0
2
0
1
Time[s]
Şekil
11:
parametrelerinin
türevlerinin değişimi (Problem 2)
500
0
0
2
-0.02
0
1
Time[s]
zamana
2
göre
Torque LPV Problem 3
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
2
3000
Şekil 8: Fren Torku Profili (Problem 2)
2500
Slip LPV Problem 2
2000
0.14
1500
T [Nm]
0.12
1000
b
0.1
Slip()
500
0.08
0
0.06
-500
0.04
-1000
0.02
0
0
0.2
0.4
0.6
0.8
Ref
1
Time[s]
1.2
1.4
1.6
1.8
2
Şekil 12: Fren Torku Profili (Problem 3)
LPV
Slip LPV Problem 3
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
2
0.14
Şekil 9: Boylamasına Kayma (Problem 2)
0.12
0.1
LPV Problem 2
10
0.8
8
0.6
6
0.005
0
1
Time[s]
2
0.4
4
0.2
2
0
0
-0.2
0
1
Time[s]
2
0.08
0.06
0.04
3
0.01
0
12
1
2
-2
Ref
0.02
LPV
0
0
1
Time[s]
2
0
0.2
0.4
0.6
0.8
1
Time[s]
1.2
1.4
1.6
1.8
2
Şekil 13: Boylamasına Kayma (Problem 3)
parametrelerinin değişimi
(Problem 2)
Şekil 15: Taşıt Hızı (Problem 3)
LPV Problem 3
0.02
0.015
-3
1.2
5
1
4
0.8
x 10
3
0.01
3
0.6
2
Şekil 10:
1
1
0.015
1.2
Slip()
0.02
-3
x 10
2
0.4
0
0
Şekil 14:
7
1
0.2
0.005
1
Time[s]
2
0
0
-0.2
-1
0
1
Time[s]
2
0
1
Time[s]
parametrelerinin değişimi (Problem
3)
2
12
4
10
2
8
4
-4
2
0
1
Time[s]
2
0
4.
0.04
0.03
0.02
̇
6
-2
-6
;_ LPV Problem 3
0.01
;_3
̇
0
;_2
;_1
̇
6
0
5.
-0.01
-0.02
0
1
Time[s]
2
-0.03
0
1
Time[s]
2
6.
Şekil 15:
parametrelerinin zamana göre
türevlerinin değişimi (Problem 3)
6 .3 Problem 3
Son olarak, benzetim çalışması esnasında t=1 s
anında taşıtın mu=0.8 sürtünme katsayılı bir yoldan
mu=1.0 sürtünme katsayılı bir yola geçişi sağlanmıştır.
Bu esnada iki farklı kontrolü arasında geçiş yapılmıştır.
Sonuçlar Şekil 12 ve 15 arasında verilmiştir. Kontrolcüler
arasında kararlı geçiş yapıldığı gözlemlenmektedir.
7.
8.
7. TARTIŞMA VE SONUÇ
Bu çalışma esnasında, kontrolcü mimarisi olarak
DPD tipi kontrolcüler çoklu model geçişli bir altyapı
içerisine yerleştirilmiş ve farklı yol şartlarında altında
farklı kontrolcüler arası kararlı geçişlerin yapıldığını
garantileyen kararlılık koşulları doğrusal matris
eşitsizliklerinin çözümüyle elde edilmiştir. Benzetim
sonuçları teklif edilen kontrolcü mimarisinin ABS
kontrolünde etkin olduğunu ıspat etmiştir.
Çalışmanın ilerleyen aşamalarında yol yüzeyini
tanıyan ve kontrolcüler arası geçişi denetleyen bir
algoritma önerilecektir.
9.
10.
11.
TEŞEKKÜR
12.
111M601 nolu araştırma projesi kapsamında
çalışmaların gerçekleştirilmesini mümkün kılan Tübitak’a
teşekkürlerimizi sunarız.
KAYNAKLAR
Polat, I, Eşkinat, E., Köse, I.E., 2007,“Dynamic
output feedback control of quasi-LPV
mechanicalsystems”, IET Control TheoryAppl., 14, pp. 1114–1121.
2. Yazıcıoğlu, Y, Ünlüsoy, Y.S., 2008, “A fuzzy logic
controlled anti-lock braking system (ABS) for
improved braking performance and directional
stability”, International Journal of Vehicle DesignSpecial Issue: Advanced Traction/Braking Vehicle
Control”, 48(3-4), pp 299-315
3. Öniz, Y., Kayacan, E., Kaynak, O., 2009 “A
Dynamic Method to Forecast the Wheel Slip for
Antilock Braking System and Its Experimental
Evaluation”, IEEE Transactions on Systems, Man,
and Cybernetics—PART B: Cybernetics, 39-2, pp
1.
13.
14.
8
551-560.
Kayacan, E., Öniz, Y., Kaynak, O., 2009, “A Grey
System Modeling Approach for Sliding-Mode
Control of Antilock Braking System”, IEEE
Transactions on Industrial Electronics, 56- 8, pp
3244-3252
PETERSEN, I., 2003, “Wheel Slip Control in ABS
Brakes using Gain Scheduled Optimal Control
with Constraints”, (Doktora tezi), Norwegian
University of Science and Technology, Trondheim,
Norveç
Yİ, J., Alvarez, L., Horowitz, R., Canudas de Wit,
C., (2000), “Adaptive Emergency Braking
Control in Automated Highway System Using
Dynamic
Tire/Road
Friction
Model.”,
Proceedings of 39th IEEE Conference of Decision
and Control, Sydney, Australia, pp. 456–461.
Solyom, S., (2002), “Synthesis of a Model-based
Tire Slip Controller”, (Y.L tezi), Department of
Automatic Control Lund, Institute of Technology,
Lund, İsveç.
Corno, M., Savaresi, S. M., Balas, G., (2009) “On
linear-parameter-varying (LPV) slip-controller
design for two-wheeled vehicles”, Int. J. Robust
Nonlinear Control; 19, pp 1313–1336
Başlamışlı, S. Ç., Köse, I. E. and Anlas, G, (2007).,
“Robust Control of Anti-Lock Braking System”,
Vehicle System Dynamics, 45-.3, pp 217-232,
Okyay, A, Ciğeroğlu, E., Başlamışlı, S.Ç., (2013),
“A New Sliding Mode Controller Design
Methodology with Derivative Switching Function
for Antilock Brake System”, Proceedings of the
Institution of Mechanical Engineers, Part D, Journal
of Automobile Engineering,
Savaresi; SM; Tanelli, M., (2010), “Active Braking
Control Systems Design for Vehicles”, SpringerVerlag, London
Sui, D, Johansen, T, (2010), “Moving Horizon
Estimation for Tire-Road Friction During
Braking”, IEEE International Conference on
Control Applications Part of 2010 IEEE MultiConference on Systems and Control Yokohama,
Japan, September 8-10.
Lee, C.Y., (2006), “Adaptive Control of a Class of
Nonlinear Systems Using Multiple Parameter
Models”, International Journal of Control,
Automation, and Systems, vol. 4, no. 4, pp. 428-437
Wang, R.G., Liu, Z.D, Qi, Z.Q, Ma, Y.F., Cui, H.F.,
(2005), “Multiple Model Adaptive Control of
Antilock Brake System via Backstepping
Approach”, Proceedings of the Fourth International
Conference on Machine Learning and Cybernetics,
Guangzhou.
9
© Copyright 2026 Paperzz