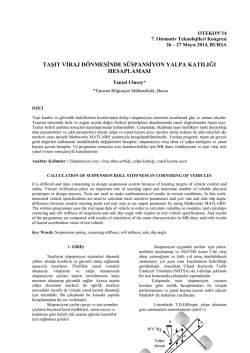
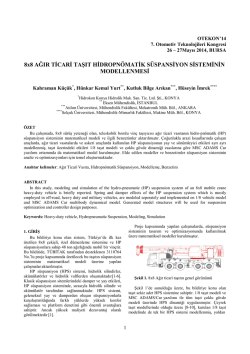
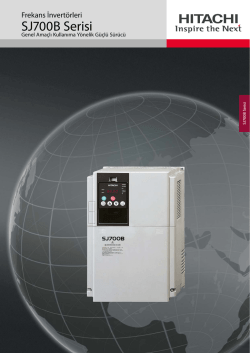
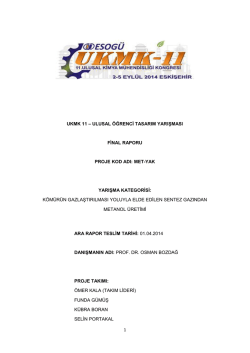
OTEKON’ 14 7. Otomotiv Teknolojileri Kongresi 24 – 27 Mayıs 2014, BURSA ZIRHLI ARACIN STATİK DEVRİLME KARAKTERİSTİĞİ Emre Sert, Tuncay Çalışkan, Haluk Atasoy Anadolu Isuzu Otomotiv A.Ş. ÖZET Kamu tarafından personel taşımacılığı için alımı yapılan zırhlı araç şartnamesine göre, araç devrilme anında masa açısına dair minimum değer talep edilmektedir. Devrilme masası testinin araç devrilme anına kadar devam ettirilememesinden dolayı Adams/Car programı kullanılarak doğrulanmış zırhlı araç modeli ile devrilme masası testi yapılmıştır. 3 farklı ön viraj demiri ve 2 farklı ön yaprak yay kullanılarak optimizasyon yapılmıştır. Sonuç olarak, genel şartnameyi sağlayan optimum ön yaprak yay ve ön viraj demiri analiz sonucuna göre seçilmiştir Anahtar kelimeler: Devrilme Masası Testi, Statik Stabilite Faktörü, Devrilme Sınırı, Devrilme Açısı, Zırhlı Araç STATIC ROLLOVER CHARACTERISTICS OF THE ARMORED VEHICLE ABSTRACT According to the armored vehicle specification that has been purchased by the public, minimum table angle value is requested at the time that the vehicle rolls over. As physical tilt table test can not be continued until vehicle rollover time, tilt table test was performed with armored verified vehicle model using Adams/Car software. To make an optimization using three different front anti-roll bar and two different front leaf spring. In conclusion, according to the results of the analysis, has been selected optimum front leaf spring and front anti roll-bar, which provide general specifications. Keywords: Tilt Table Test, Static Stability Factor, Rollover Threshold, Roll Angle, Armored Vehicle SSF oranı NHTSA tarafından çarpışma testlerinde aracın devrilme karakteristiğini belirlemek için kullanılır. Araçların devrilme riskine göre NHTSA tarafından puanlama yapılmaktadır. Şekil 1’ de görüleceği gibi SSF oranı 1.25 den yüksek olan araçlar 4 veya 5 puanla tanımlandırılırken, SSF oranı 1.25’ den düşük olan araçlar 3 veya daha az puanlatanımlandırılır. Rechnitzer ve Richardson çalışmalarında 16 farklı polis aracının Statik Stabilite faktörünü ölçerek NHTSA’ nın verdiği puanlamayı uygulamaştır. Çalışmalarındaki amaç, en stabil ve devrilmeye dirençli polis aracını belirlemek idi. [3] SSF değerindeki artış,araçların devrilmeye karşı direnci ile doğru orantılıdır. *NHTSA: National Highway Traffic Safety Administration. 1. GİRİŞ Aracın ağırlık merkezi, iz genişliği ve ağırlığı gibi temel özelliklerinin dışındaki parametrelerin ihmal edilmesi ile aracın viraj dönme anındaki davranışına ilişkin bilgi alınması amacıyla devrilme karekteristliğinin çıkarılmasına statik stabilite faktörü (SSF) denilmektedir. Özellikle ağır ticari araçlarda kazaların çoğu devrilme kaynaklıdır. [1] SSF' nin hesaplanmasında aracın yaylanmayan kütleye ait amortisör, yay, makas ve havalı körük sertlik değerleri ihmal edilmektedir. SSF'nin hesaplanması,araçların devrilme karakteristliklerini belirlemek açısından önemlidir ve araçlar *NHTSA tarafından SSF puanına göre belirli skalada ölçeklendirilmiştir. NHTSA ya göre binek araçların statik stabilite faktörü 1.30-1.55 arasında değişmektedir. [2] 1 ∑ 𝐹𝑦 = 0 𝐹𝑦 − 𝑀 ∗ 𝑎𝑦 = 0 ise 𝐹𝑦 = 𝑀 ∗ 𝑎𝑦 (1.1) ∑ 𝐹𝑧 = 0 𝑀 ∗ 𝑔 − 𝑅𝑧 = 0 (1.2) Denklem (1.1) ve (1.2) düzenlenir ise, (1.3) (1.4) 𝑅 Ağırlık merkezine göre moment alınır ise, SSF Şekil 1. Statik Stabilite Faktörü ∑ 𝑀𝐶𝐺 = 2. STATİK STABİLİTE FAKTÖRÜ HESABI 𝑇𝑊 2 ∗ 𝑅𝑧 − 𝐻𝐶𝐺 ∗ 𝐹𝑦 = 0 Denklemler düzenlenir bulunmuş olur. Viraja giren taşıtın rijit olduğu yani suspansiyon ve lastik defarmosyanları olmadığı varsayımı ile devrilme anında dış tekerlerin yol ile teması kesileceği için bu tekerleklere gelen kuvvetler "0" olacaktır. Aracın viraj dönme davranışının simule edilmesi ve devrilme karakteristliğinin belirlenebilmesi için statik stabilite faktörü hesaplanmalıdır. El-Gindy [4], farklı özellikteki araçları aynı yarıçaptaki viraja aynı hızlar ile test etmiştir ve devrilme meydana gelmemesi için viraj anında aracı etkileyen yanal ivme (𝑎𝑦 ) değerinin araca ait SSFdeğerinden küçük olması gerektiği sonucuna ulaşmıştır. 𝑎𝑦 ≤ 𝑆𝑆𝐹 𝑉2 𝐹𝑦 = 𝑀 ∗ 𝑎𝑦 = 𝑀 ∗ 𝑅𝑧 = 𝑀 ∗ 𝑔 SSF= 𝑇𝑊 2 ∗ 𝐻𝐶𝐺 2 = 𝑅∗𝑉 𝑔 ise (1.5) statik stabilitefaktörü (1.6) (1.6) denklemi düzenlenir ve hız (V) çekilir ise aracın devrilme öncesindeki sınır hızı bulunur. TW∗R∗g 2∗HCG Vkritik = � (1.7) Araca ait hız, iz genişliği ve yol dönüş yarıçapı biliniyor ise aracın devrilme öncesindeki kritik ağırlık merkezi yüksekliği bulunabilir. (1.0) Araca ait SSF’nin hesaplanması bu açıdan önem arz etmektedir. Aşağıda SSF’ nin hesaplanmasına yer verilmiştir. Eğim nedeni ile ağırlık merkezinin konumundaki değişiklik göz ardı edilmektedir. 𝐻𝐶𝐺 𝐾𝑟𝑖𝑡𝑖𝑘 = 𝑇𝑊∗𝑅∗𝑔 2∗𝑉 2 (1.8) Araca ait hız, iz genişliği ve ağırlık merkezi yüksekliği biliniyor ise aracın devrilme öncesindeki yol dönüş yarıçapı bulunabilir. 𝑅𝑘𝑟𝑖𝑡𝑖𝑘 = M g Fy Rz CG TW HCG V R Şekil 2.Araca Etki Eden Kuvvetler Ağırlık merkezinin değişimi ihmal edilmiştir. Newton-Euler Denklemlerine göre; 2 2∗𝐻𝐶𝐺 ∗𝑉 2 𝑇𝑊∗𝑔 (1.9) = Aracın Kütlesi (kg) = Yerçekimi İvmesi ( m⁄s 2 ) =Lastiklere Etki Eden Yanal Kuvvet(N) = Lastiklere Düşey Yönde Etki Eden Kuvvet = Aracın Ağırlık Merkezi = İz Genişliği (m) = CG’ nin ZemindenYüksekliği (m) = Aracın Hızı (m/s) = Yol Dönüş Yarıçapı (m) momentini karşılayamadığı için devrilme meydana gelecektir. Diğer bir ifade ile dış tekere etki eden Fz kuvveti "0" olduğu an devrilme başlangıcıdır. Devrilmeye neden olan ana faktör, yanal yük transferidir. Yük transferi yanal ivmenin bir fonksiyonudur ve dış tekere etki eden Fz kuvvetini azaltarak iç tekere etki eden Fz kuvvetinin artmasına neden olacaktır. Bu nedenle, devrilme dinamiği ve aracın ağırlık merkezinin yüksekliği arasındaki ilişkiyi belirtebilmek için araç modelindeki devrilme eksenine dayanan Yük Transfer Oranı parametresi tanımlanmıştır. 3. DEVRİLME MASASI TESTİ Aracın Statik Stabilite faktörünün bulunması için yapılan testlerin başında devrilme masası testi (DMT) gelmektedir. Devrilme masası testi ile aracın virajlardaki davranışlarınınbelirlenmesi amaçlanmıştır. Ayrıca DMT' nin tekrarlanabilir olması doğruluğunu arttırmaktadır. [5] Şekil 3’ te gösterildiği gibi araç referans zemin üzerinde statik halde durmaktadır ve masa belli açıyla yukarı doğru θ açısı kadar kaldırılarak araca devrilme anındaki düşey ve yatay doğrultada etki eden yükler belirlenir. Burada yaylanan kütlenin ağırlığından oluşan kuvvetler şunlardır, 𝑌𝑇𝑂 = 𝐹𝑅 −𝐹𝐿 (2.0) 𝐹𝑅 +𝐹𝐿 𝐹𝑅 = Sağ Tekere Etki Eden Dikey Kuvvet FL = Sol Tekere Etki Eden Dikey Kuvvet m ∗ g ∗ sin θ Yanal Kuvvet m ∗ g ∗ cos θ Düşey Kuvvet (N) (N) Şekil 4’ te gösterilen yaylanmayan kütleye ait yay, amortisör ve viraj demiri karakteristliği denkleme katılır ise, 𝑌𝑇𝑂 = k c m TW 𝑀𝑠 2 𝑚∗𝑔∗TW (𝑘ø + 𝑐ø̇ )+𝑀𝑠 (2.1) = Yay Sertliği Katsayısı (N/mm) = Amortisör Sönümleme Katsayısı (Nsn/mm) = Araç Ağırlığı (N) = Araç İz Genişliği (mm) = Viraj Demiri Burulma Katılığı (Nmm/der) Şekil 3. Devrilme Masası Testi Gösterimi Şekil 3’ te gösterildiği gibi araca etki eden yanal ivme (𝑎𝑦 ) şu şekilde ifade edilmektedir; 𝑎𝑦 = 𝑀𝑔𝑠𝑖𝑛∅ 𝑀𝑔𝑐𝑜𝑠∅ = 𝑡𝑎𝑛∅ ∅ = Masa Açısı (der) Devrilmeme şartı olarak araca etki eden yanal ivmenin (𝑎𝑦 ), SSF’ den küçük olması gerektiğini belirtilmiştir. Bu nedenle Devrilme Masası Testi yanal ivmenin ölçülmesi dolayısıyla SSF’ nin hesaplanması açısından en geçerli testtir. Sıfır moment noktası teoremine göre masanın y ekseni ile yaptığı açı olan "∅" devrilme anına ulaştığı zaman aracın ağırlık merkezi doğrultusunun masaya temas ettiği nokta da oluşan hayali sıfır moment noktası (FZMP) aracın masaya temas ettiği hacmin dışına çıkacak ve reaksiyon kuvveti (N)’ nin oluşturduğu devrilme momenti, aracın kendi ağırlığından oluşan atalet Şekil 4.Rijit Araç Gösterimi Yanal yük transferini minmuma indirecek şekilde yaprak yay, amortisör ile viraj demiri sertliği seçilecek olur ise aracın devrilme anındaki devrilme açısı da artacak ve araç daha stabil olacaktır. 4. DEVRİLME ANALİZİ Şartnamede talep edilen minumum devrilme açısının yanı sıra EC-R 107 regülasyonunda devrilme açısının minumum 28o olması istenmektedir. İlgili şartın 3 sağlanabilmesi için farklı yaprak yay sertliği ve viraj demiri katılığının etkisinin gözlemlenmesi için test sırasında değiştirilerekbelirli masa açılarına karşılık ağırlık merkezindeki gövde açıları karşılaştırılmıştır. Ayrıca fiziksel test sırasında masa belirli açıya kadar yatırılabilmektedir.Aracın devrilme sınırında iplerden kurtulması veya kayması ihtimaline karşı şartname sağlanıyor ise test sonlandırılmıştır ve statik devrilme eşiği belirlenememiştir. Adam/Car’ da devrilme masası test analizinin yapılma amacı ise aracın devrilme anındaki masa açıları ile gövde açılarının bulunmasıdır. Devrilme testi için SAE J2180 standardı uygulanmıştır. Standarta göre, testin yapılması sırasında uyulması gereken koşullar aşağıda sıralanmıştır; • • • • Masa açısal hızı maksimum 0.25 (der/sn) � 𝟎. 𝟏 (der) Masa açısı doğruluğu + Araç devrilme açısı ağırlık merkezinden ölçülecektir. Rüzgarın etkisi ≤ 0.003 (g) olmalıdır. Aşağıda teknik özellikleri verilen araca öncelikle fiziksel devrilme masası testi farklı yaprak yay sertliği ve viraj demiri katılığı uygulanmış ve araç devrilmeme şartı sağlanmaya çalışılmıştır. Devamında ise zırhlı araç Adams/Car modeli oluşturulup model doğrulanmış ve uygun yaprak yay ve viraj demiri seçimi için optimizasyon yapılmıştır. İlave olarak aracın devrilme anındaki devrilme açısı ölçülmüştür. Şekil 5. Zırhlı Araç Devrilme Masası Testi 4.2 Adams / Car Modeli Zırhlı araca ait şasi, gövde, aks, motor ağırlık ve kütle � 5 mm ataletleri ile aks - şasi bağlantı koordinatları + tolerans ile modele aktarılmıştır. Tablo 1. Zırhlı Araç Teknik Özellikler TEKNİK ÖZELLİKLER Dingil Mesafesi 4.2.1 Arka Aks ÖLÇÜLER (mm) 3385 Azami Uzunluk 7305 Azami Genişlik 2282 Azami Yükseklik 3350 Ön İz Genişliği 1914 Arka İz Genişliği 1650 Ön Uzantı 1640 Arka Uzantı 2245 Şekil 6 ve 7’de görüleceği üzere, arka ve ön aks rijit olarak modellenmiştir ve her aks parçasına ait ağırlık ve 3 eksendeki atalet bilgileri modele aktarılmıştır. 4.1 Fiziksel Test Şekil 6. Arka Aks Adams Modeli Ouran yolcu ağırlığı olarak koltuk üzerlerine yük verilmiş olup, aracın toplam ağırlığı 11100 kg olacak şekilde, kapalı ortamda devrilme masası testi yapılmıştır. İki farklı sertlikteki yaprak yay ve 3 farklı katılıktaki önviraj demiri ile test tekrarlanarak minimum devrilme açısı koşulu sağlanması amaçlanmıştır. Körük, amortisör ve viraj demirie ait sertlik değerleri nonlinear olarak tanımlanmıştır. Test sırasında arka aksa ait amortisör, viraj demiri ve körük parametreleri değiştirilmemiştir. 4 kütlenin amortisör, makas ve körük sertlikleri ile alt sistem parçalarının ağırlık ve atalet bilgileri aynı doğrulukta modele aktarılmıştır. Aynı şekilde reboundstop ile bumpstop etki mesafeleri ve sertlik değerleri nonlinear şeklinde aktarılmıştır. Ancak amortisörin üst ve alt noktasındaki burçlar ile panhard kolunun ve viraj demiriin gövde bağlantı noktalarındaki burçların sertlik değerleri Adams/Car kütüphanesinden alınmıştır. Modelin doğruluğunun diğer parametresi olarak da fiziksel test esnasında belirli masa açılarına karşılık ölçülen gövde açısı Adams sonuçları ile karşılaştırılmıştır. 4.2.2 Ön Aks Farklı katılığa sahip 3 farklı ön viraj demiri değiştirilerek test tekrarlanmıştır. Aynı şekilde farklı sertlik oranına sahip 2 farklı yaprak yay da değiştirilerek 6 farklı kombinasyonda devrilme masası testi yapılmış ve araca ait SSF ile masa açısı Adams/Car simulasyonu ile bulunmuştur. 3 farklı viraj demiri ile yaprak yaya ait sertlik değerleri aşağıda paylaşılmıştır. Şekil 7. Ön Aks Adams Modeli 4.3 Model Doğrulama Araç yüksüz durumdayken tartılmıştır ve ön aks ile arka aksa gelen yükler belirlenmiştir. Ölçüm sonucunda araç ağırlık merkezinin "x,y" eksen koordinatları belirlenmiştir. Ayrıca açısı belli platform üzerine aracın ön tarafının çıkartılması ile ağırlık merkezinin "z" eksenindeki koordinatı belirlenmiştir. Yüksüz aracın statik haldeki Adams/Car modelinin doğrulanması için korelasyon yapılarak ön ve arka aksa gelen yükler çıkarılarak, fiziksel ölçüm sonuçları yakalanmıştır. Dolu araç pedler ile tartılarakön ile arka aksa gelen yükler belirlenmiştir. İlave edilen 2450 kg’ ın Adams/Car modeline doğru şekilde aktarılabilmesi için korelasyon yapılarak aks yükleri fiziksel ölçüm sonuçları ile karşılaştırılmıştır. Boş ve yüklü aracın aks yükleri aşağıdaki tabloda verilmiştir. Şekil 8. Zırhlı Araç Adams Modeli Fiziksel test sırasında gövde açısı arka bagaj kapağı üzerinden ölçülmüş idi. Adams modelinde de aynı noktadan gövde açısı ölçümü alabilmek için aynı noktaya düzlem yerleştirilmiştir. Şekil 8 da görüleceği üzere kırmızı top şeklinde gösterilen noktadan gövde ölçümü alınmıştır. 4.4 Test Sonuçları Test sırasında araçtaki yaprak yay sertliği ile ön ve arka viraj demiri çaplarıaşağıdaki tabloda verilmiştir. İlk 3 test için yaprak yay 20 kg/mm sertliğinde ve sadece ön viraj demiri çapları sırasıyla Ø38, Ø40 ve Ø42 olacak şekilde değiştirilmiştir.Son 3 test ise yaprak yay 23 kg/mm sertliğinde ve ön viraj demiri çapları sırasıyla Ø38, Ø40 ve Ø42 olacak şekilde değiştirilerek test tekrarlanmıştır.Yüklü zırhlı aracın SSF’sı (1.6) numaralı denkleme göre hesaplanır ise, Tablo 2. Aks Yükleri Karşılaştırma Tablosu SSF= Adams/Car sonucu ile fiziksel ölçüm sonuçlarının yakın çıktığı ve hatanın %1’ in altında olduğu görülmektedir. Devrilme masası testinde masanın açısal hızı küçük olduğundan ihmal edilebilir ve statik test olarak kabul edilmektedir. [6] Bu nedenle aracın statik haldeyken doğrulanması yeterli olmaktadır. Yaylanmayan 𝑻𝑾 𝟐 ∗ 𝑯𝒚𝒌 = 𝟏𝟗𝟏𝟒 𝟐 ∗ 𝟏𝟐𝟓𝟎 =0,76 TW = 1782 (mm) Ön iz genişliğinin = 1250 (mm) Araç ağırlık merkezinin seminden HCG yüksekliği 5 Devrilme anındaki yanal ivmeye bağlı olarak aracın devrilme olasılığı NHTSA tarafından aşağıdaki formül ile ifade edilmektedir. Gövdenin ön aksa göre yatma açısı; φ = 5,07 (der) Devrilme Olasılığı = 4.4.2 Test No : 2 𝟏𝟎𝟎 𝟏+𝑺𝑲𝑭𝟔.𝟗 Zırhlı aracın devrilme olasılığı ise, Devrilme Olasılığı (%) = 𝟏𝟎𝟎 𝟔.𝟗 𝟏+(𝟎.𝟕𝟔) Test-1’ den farklı olarak Ø40 çapında daha sert ön viraj demiri kullanılmıştır. Tablo 4’ te gösterildiği üzerearaç devrildiği anda masa açısı 28,110 iken gövde açısı 32,990 olmaktadır. Test-1’ deki sonuçlara kıyasla masa açısı artarken gövde açısında azalma olmuştur ve şartnamesinde belirtilen koşulu ve regülasyon şartını sağlamaktadır. = 40 Devrilmeme koşulu için; aracın viraj dönüşü anında hızına bağlı olarak oluşan yanal ivmenin aracın SSF' sından küçük olması beklenmektedir. Tablo 4. Fiziksel Test / Adams Simülasyonu Karşılaştırma 4.4.1 Test No : 1 Aşağıdaki tabloda yay ve viraj demiri özellikleri ile devrilme anındanki masa ve gövde açıları bulunmaktadır. Model doğruluğunu kıyaslamak için belli masa açılarına karşılık ölçülen gövde açıları verilmiştir. Adams simülasyon sonuçlarının % 10 hata oranı ile fiziksel test sonuçlarını karşıladığı görülmektedir. Yaprak yay Ön Arka Stabilizer Stabilizer 200 40 38 Devrilme Anı Platform Gövde Açısı Adams/Gövde Hata Oranı (%) Açısı (Fiziksel) Açısı 6 7 6,5 7,1 18 21,5 19,01 11,6 26,2 31,6 28,25 10,6 28,11 - 32,99 - Tablo 3. Fiziksel Test / Adams Simülasyonu Karşılaştırma Şekil 11. Masa Açısı ile Gövde Açısının Gösterimi Test sonucuna göre, araç devrildiği anda masa açısı 27,730 iken gövde açısı 33,570 olmaktadır. Elde edilen sonuç şartnamede belirtilen koşulu yerine getirmektedir. Şekil 9’ da masa açısı ile gövde açısının zamana bağlı Adams/Car sonuçları paylaşılmıştır. Masa açısının artmasına bağlı olarak gövde açısı ile masa açısı arasındaki farkın arttığı ve gövde açısının 280 değerine ulaşması sonrasında nonlinear artış gösterdiği görülmektedir. Açı değişimindeki doğrusallığın bozulma nedeni dış arka tekerin zemin teması bağlantısının azalmasına paralel olarak tekere gelen "z" eksenindeki kuvvetin minimuma yaklaşmasıdır. Şekil 12.Ön Aks-Gövde Açısı Gövdenin ön aksa göre yatma açısı; φ = 4,97 (der) Daha katı ön viraj demiri kullanılması ile gövdenin ön aksa göre yatma açısında azalma olduğu gözlemlenmiştir. 4.4.3 Test No : 3 Test-2’ den farklı olarak Ø42 çapında daha sert ön viraj demiri kullanılmıştır. Tablo 5' te gösterildiği üzerearaç devrildiği anda masa açısı 28,540 iken gövde açısı 32,920 olmaktadır. Tablo 5. Fiziksel Test / Adams SimülasyonuKarşılaştırma Şekil 9. Masa Açısı ile Gövde Açısının Gösterimi Yaprak yay Ön Arka Stabilizer Stabilizer 200 Devrilme Anı Şekil 10. Ön Aks - Gövde Açısı 6 42 38 Platform Gövde Açısı Adams/Gövde Hata Oranı Açısı (Fiziksel) Açısı (%) 6 6,9 6,45 6,5 18 21,6 18,91 12,5 26,2 31,3 28 10,5 28,54 - 32,92 - Tablo 7. Fiziksel Test / Adams Simülasyonu Karşılaştırma Yaprak yay Ön Arka Stabilizer Stabilizer 230 40 38 Devrilme Anı Şekil 13. Masa Açısı ile Gövde Açısının Gösterimi Şekil 14. Ön Aks - Gövde Açısı Gövdenin ön aksa göre yatma açısı; φ = 4,68 (der) Platform Gövde Açısı Adams/Gövde Hata Oranı Açısı (Fiziksel) Açısı (%) 6 6,9 6,28 9,0 18 21,4 18,9 11,7 26,2 31,3 27,43 12,4 28,56 - 32,64 - Şekil 17. Masa Açısı ile Gövde Açısının Gösterimi 4.4.4 Test No : 4 Test-3’ den farklı olarak 23 kg/mm'lik yaprak yay ve Ø38 çapında ön viraj demiri kullanılmıştır. Tablo 6'da gösterildiği üzerearaç devrildiği anda masa açısı 28,170 iken gövde açısı 32,70 olmaktadır. Şekil 18. Ön Aks - Gövde Açısı Gövdenin ön aksa göre yatma açısı; φ = 4,49 (der) Tablo 6. Fiziksel Test / Adams Simülasyonu Karşılaştırma Yaprak yay Ön Arka Stabilizer Stabilizer 230 Devrilme Anı 38 38 4.4.6 Test No : 6 Platform Gövde Açısı Adams/Gövde Hata Oranı Açısı (Fiziksel) Açısı (%) 6 7 6,3 10,0 18 21,5 19,07 11,3 26,2 31,5 27,46 12,8 28,17 - 32,7 - Test-5’ den farklı olarak Ø42 çapında daha sert ön viraj demiri kullanılmıştır. Tablo 8' de gösterildiği üzerearaç devrildiği anda masa açısı 28,610 iken gövde açısı 32,600 olmaktadır. Tablo 8. Fiziksel Test / Adams Simülasyonu Karşılaştırma Yaprak yay Ön Arka Stabilizer Stabilizer 230 Şekil 15. Masa Açısı ile Gövde Açısının Gösterimi Devrilme Anı Şekil 16. Ön Aks - Gövde Açısı Gövdenin ön aksa göre yatma açısı; φ = 4,93 (der) Daha sert yaprak yay kullanılması ile gövdenin ön aksa göre yatma açısında azalma olduğu gözlemlenmiştir. 42 38 Platform Gövde Açısı Adams/Gövde Hata Oranı Açısı (Fiziksel) Açısı (%) 6 6,7 6,2 7,5 18 21,2 18,87 11,0 26,2 31,3 27,42 12,4 28.61 - 32.60 - Şekil 19. Masa Açısı ile Gövde Açısının Gösterimi 4.4.5 Test No : 5 Test-4’ den farklı olarak Ø40 çapında daha sert ön viraj demiri kullanılmıştır. Tablo 7' da gösterildiği üzerearaç devrildiği anda masa açısı 28,560 iken gövde açısı 32,640 olmaktadır. Şekil 20.Ön Aks - Gövde Açısı 7 Gövdenin ön aksa göre yatma açısı; φ = 4,39 (der) 5. SONUÇ Fiziksel test ile araç devrilme anına kadar sürdürülemediğinden Adams/Car simülasyonu ile devrilme anında masa açısı ve gövde açısı bulunmuştur. Farklı sertlikteki ön viraj demiri ve yaprak yay kullanılarak tekrarlanan testler sonucunda araç şartnamesini her test sonucunun sağladığı gözlemlenmiştir. Bu nedenle Test-1’ deki 20 (kg/mm) sertliğindeki yaprak yay ve Ø38 çapındaki ön viraj demiri kullanılması sonucuna ulaşılmıştır. Adams/Car sonuçları fiziksel sonuçlar ile karşılaştırıldığında kabul edilebilir az hata oranı ile sonuç verdiği gözlemlenmiştir. Şekil 22. Yaprak Yayın Viraj Demirine Göre Değişimi Her bir viraj demiri parametresinin 2 farklı sertlikteki yaprak yaya göre değişimi şekil 23 de çizdirilmiştir. Viraj demiri katılığının artırılması maksimum masa açısını artırdığı gözlemlenmiştir Şekil 23. Viraj Demirinin Yaprak Yaya Göre Değişimi Şekil 24 de farklı yaprak yaylar ile farklı viraj demirleri arasındaki bağıntı gösterilmektedir.sağ üst köşede yaprak yay sertlikleri kırmızı ve siyah renk ile gösterilmektedir. Farklı katılıktaki ön viraj demirleri "x" ekseninde; masa açısı ise "y" ekseninde gösterilmektedir. Şekil 21. Adams Simülasyonu / Devrilme Anı Fiziksel test sırasında ilk başta sağ arka lastiğin havalandığı gözlemlenmiştir. Şekil 21’ de görüleceği üzere Adams simülasyonunda devrilmenin meydana geldiği anda zemin ile teması kesilen ilk lastiğin arka iç teker olduğu gözlemlenmiştir. Arka aksın ön aksa göre daha rijit olması ve test sırasında ilk olarak sağ arka tekerliğin yerden temasının kesilmesinden dolayı ön aks rijitliğinin artırılması amaçlanmıştır. Bu nedenle değiştirilen makas ve ön viraj demiri etkisinin gözlemlenebilmesi için gövde ağırlık merkezinin ön aksa göre yatma açısı her test için çizdirilmiştir ve ön viraj demiri katılığı ile makasın sertliğinin artmasına bağlı olarak ön aksın daha rijit davrandığı; gövdenin ön aksa göre yatma açısının azaldığı sonucuna ulaşılmıştır. Analiz sonucunda her bir yaprak yay parametresinin 3 farklı katılıktaki ön viraj demirine göre değişimi şekil 22 de çizdirilmiştir.Yaprak yay sertliğinin artırılması maksimum masa açısını artırdığı gözlemlenmiştir. Şekil 24. Yaprak Yay ile Viraj Demiri Arasındaki Bağıntı Değişken 2 parametreye göre devrilme anındaki masa açısının alacağı değerleri gösteren histogram şekil 25 de gösterilmektedir. Şekil 25.Masa Açısı Çözüm Histogramı 8 KAYNAKLAR 1. Emniyet Müdürlüğü “Trafik Kaza İstatistikleri” 2011. 2. Hinch, J., et al., “WHTSAYs Rollover Rulemaking Program - Results of Testing and analysis”. SAE 92058. 3. G. Rechnitzer, S. Richardson, E. Hoareau, 2000, “Evaluatiıon and Testing of Police Vehicles for Rollover Stabilitie”. 4. El - Gindy, M., 1995, “Overview of Performance Measures for Heavy Commercial Vehicles in North America”, Int. J. of Vehicle Design, Vol. 16, No. 4-5. 5. K. D. Lampert. “A Study of Vehicle Properties That Influence Rollover and Their Effect on Electronic Stability Controllers” . 6. Winkler, C. B., et al., “Repeatability of the Tilt Table Test Method”, SAE paper 930832. 9 10
© Copyright 2026 Paperzz