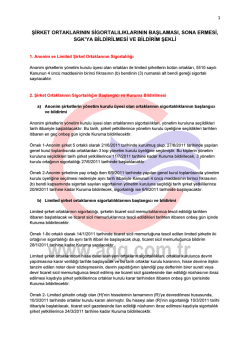
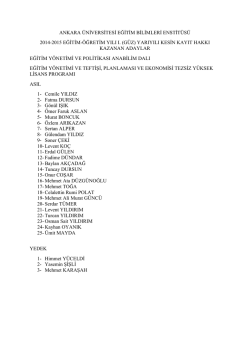
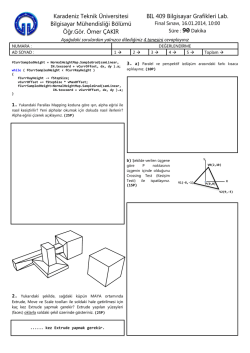
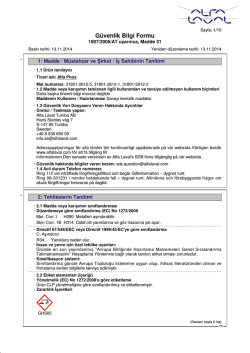
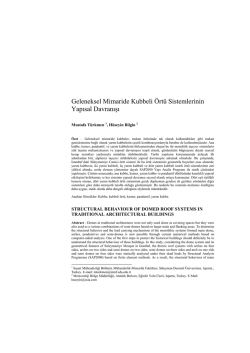
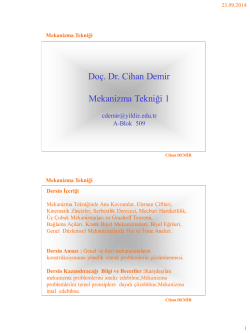
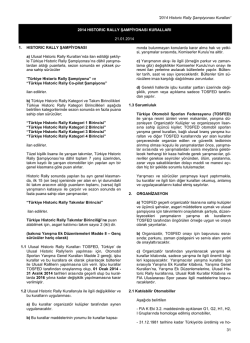
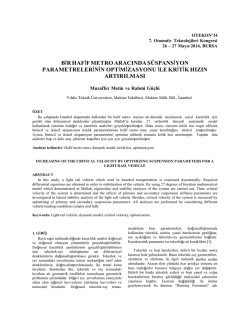
CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com İKİ BOYUTLU ÇUBUK SİSTEMLER İÇİN YAPI ANALİZ PROGRAM YAZMA SİSTEMATİĞİ Yapı Statiği‘nde incelenen sistemler çerçeve sistemlerdir. Buna ek olarak incelenen kafes ve karma sistemler de aslında çerçeve sistemlerin özel bir halidir. Çerçeve sistemler üzerinde yükler bulunan, düğüm noktalarına yükler etkiyen, yapı oynak olmayacak şekilde mafsallar kullanılabilen genel bir sistemdir. Çerçeve sistemlerde, çubuklar düğüm noktalarında birbirlerine mafsalla bağlanırsa ve yüklerde sadece düğüm noktalarından etki ederse böyle sistemlere kafes sistemler denir. Eğer bir sistem de hem çerçeve hem de kafes sistem bir arada bulunursa böyle sistemlere de karma sistemler denir. Bu üç sistemin analizinde, yapının stabil olması önemlidir. Bunun yanı sıra serbestlik derecesi ve hiperstatiklik derecesi yapıların en önemli karakteristiklerini belirler. Sistemlere göre; çubuk sayısı (m), serbestlik derecesi (SD) ve hiperstatiklik derecesi (HD) arasında şu şekilde bir ilişki vardır; Çerçeve sistemlerde: HD= 3 . m – SD Kafes sistemlerde: HD= m – SD Karma sistemlerde: m1= Çerçeve sistemin çubuk sayısı m2 = Kafes sistemin çubuk sayısı HD= (3 . m1 + m2) – SD Hiperstatiklik derecesi eğer sıfırdan küçük çıkarsa sistem oynaktır yani stabil değildir. Ama her oynak yapının hiperstatiklik derecesi sıfırdan küçük olmayabilir. Hiperstatiklik derecesinin sıfıra eşit olması durumunda böyle yapılara izostatik sistemler denir. İzostatik sistemlerde bilinmeyen kuvvetler (mesnet reaksiyonları, çubuk ucu kuvvetleri gibi) üç denge denklemi ile çözülebilirler. ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com ΣFx= 0 (yatay denge şartı) ΣFy= 0 (düşey denge şartı) ΣM= 0 (moment şartı) Ancak; yukarda yazılan denklemlerin matrisi singular olmamalıdır yani determinantı sıfıra eşit olmamalıdır. Eğer determinant sıfıra eşit olursa yapı oynaktır ve böyle bir yapının çözümü yoktur. Hiperstatiklik derecesi sıfırdan büyük olan sistemlere ise hiperstatik sistemler denir. Böyle sistemlerde bilinmeyen reaksiyonlar üç denge denklemi ile bulunamazlar. Bu üç denge denklemine ilaveten hiperstatiklik derecesi kadar uygunluk denklemi de yazılarak bilinmeyen reaksiyonlar bulunur. Hiperstatik sistemlerin çözümünde iki metot kullanılır: 1-Kuvvet Metodu 2-Deplasman Metodu Kuvvet metodu ile yapılan çözümlerde bilinmeyen reaksiyonları bulmak için fazladan kuvvetler seçilir. Bu fazladan kuvvetler, mesnet reaksiyonları ya da çubuk kuvvetleri olarak seçilir. Gerekli uygunluk şartları yazılarak bilinmeyen reaksiyonlar bulunur. Deplasman metodunda ise düğüm noktası deplasmanları bilinmeyenler olarak seçilirler ve düğüm noktası denklemleri bu bilinmeyenler cinsinden yazılır. Bu durumda yazılan denklemlerin oluşturduğu matris yapının Stifnes matrisidir. Bu matrisin determinantı sıfır değilse yapı stabildir ve çözümü vardır. ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com 2. TEORİK BİLGİLER 2.1. Temel Kavramlar Düzlem çerçeve sistemlerin düğüm noktaları serbestlikleri yatayda u, düşeyde v ve düğüm noktasının düzleme dik eksen etrafında dönmesi θ’dır. Düğüm noktası deplasmanları şekil 2.1 deki yönlerde pozitiftir. Y Z Şekil 2.1 X Düğüm Noktası Deplasmanlarının Pozitif Yönleri Global Eksen Takımı: Bütün çubuk sistemleri için geçerli olan eksen takımıdır. (Şekil 2.1) Çubuk Eksen Takımı: Her çubuk için ayrı ayrı tanımlanan ve çubuk doğrultusunun x ekseni ile çakışmasıyla oluşan eksen takımıdır. Referans Düğüm Noktası: Çubuk eksen takımının yerleştirildiği düğüm noktasıdır. Referans düğüm noktası, her zaman ‘i’ düğüm noktası olarak adlandırılır. Çubuğun diğer noktası ise ‘k’ olarak adlandırılır. y y' x' j θj ' z=z x ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com Şekil 2.2 Global Eksen Takımı (x,y,z) ve Çubuk Eksen Takımı (x’,y’,z’) Çerçeve sistemlerde çubuk yükleri taşıyan herhangi bir çubuktaki kesit tesirleri çubuk eksen takımına göre Şekil 2.3 teki gibidir. ~ ~ ~ qj4' + qj4' ~ qj6' + qj6' ~ ~ qj5' + qj5' Pj Nj Wj ~ bj ~ qj3' + qj3' ~ ~ aj Lj qj2' + qj2' ~ ~ qj1' + qj1' Şekil 2.3 Çubuk Eksen Takımına Göre Çubuk Ucu Kuvvetleri Çubuk ucu kesit tesirleri Şekil 2.2 deki çubuk eksen takımı yönünde pozitiftir. Şekil 2.3’te görüldüğü gibi (qj ' + qj ' ) çubuk eksen takımına göre çubuk ucu kuvvetleridir. Şekil 2.3’teki çubuğun üzerine etki eden yüklerden kaynaklanan qj ' çubuk ucu kuvvetleri şöyle tarif edilir: (bj . Nj) / Lj [(wj . Lj) / 2] + [Pj . bj2 . (3 . aj + bj) / Lj3] [(wj . Lj) / 12] + [(Pj . aj . bj2 / Lj2] ~ qj' = (aj . Nj) / Lj [(wj . Lj) / 2] + [Pj . aj2 . (3 . bj + aj) / Lj3] [-(wj . Lj) / 12] - [(Pj . bj . aj2 / Lj2] ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com Çerçeve sistemlerde herhangi bir çubuktaki çubuk ucu deplasmanları çubuk eksen takımına göre Şekil 2.4’teki gibidir. (-δj) dj6' dj5' k ∆j dj4' dj3' dj2' i ∆ j = dj4'- dj1' θi = dj3' (-δj) = dj5'- dj2' θk = dj6' dj1' Şekil 2.4 Çubuk Eksen Takımına Göre Çubuk Ucu Deplasmanları Şekil 2.4’teki çubuk ucu deplasmanlarından kaynaklanan qj’ çubuk ucu kuvvetleri şöyle tarif edilir: Çubuk boy değişikliği Δj ise Hooke kanunda qj4' =( E . A / L)j . Δj şeklinde tarif edilir. Çubuk ucu dönmeleri θ i, θ k ise ve çubuk uçlarının çubuk eksenine dik olan rölatif hareketi δ j ise eğim – sehim ilişkilerinden çubuk ucu momentleri şöyle yazılırlar: qj3'= (E . I / L) . (2 .θk + 4 . θi + 6 . δj / Lj) qj6'= (E . I / L) . (2 . θi + 4 . θk + 6 . δj / Lj) Şekil 4’teki çubuğun denge denklemlerinden aşağıdaki ilişkiler yazılır: qj1'= - qj4' qj2' = +(1 / Lj) . (qj3' + qj6' ) qj5'= - qj2' Yukarıdaki tarifler kullanılarak; çubuk ucu deplasmanları dj ' cinsinden qj ' tarifi şöyle yapılır: qj1' = - (E . A / L)j . (dj4' – dj1') qj2' = (E . I / L2)j . [6 . dj3' + 6 . dj6' + 12 . (dj2' – dj5') / Lj ] qj3' = (E . I / L)j . [2 . dj6' + 4 . dj3' + 6 . (dj2' – dj5') / Lj ] qj4' = (E . A / L)j . (dj4' – dj1') qj5' = - (E . I / L2)j . [6 . dj3' + 6 . dj6' + 12 . (dj2' – dj5') / Lj ] qj6' = (E . I / L)j . [2 . dj3' + 4 . dj6' + 6 . (dj2' – dj5') / Lj ] ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com ( sj' ) çubuk eksen takımına göre çubuk rijitlik matrisi ise, yukarıdaki tarifler matris formunda şöyle yazılırlar: q j' = (sj') . d j' Bu tarifteki çubuk eksen takımına göre çubuk rijitlik matrisi aşağıdaki gibidir: (E A / L)j 0 0 -(E A / L)j 0 0 0 12(E I / L3)j 6(E I / L2)j 0 -12(E I / L3)j 6(E I / L2)j 0 6(E I / L2)j 4(E I / L)j 0 -6(E I / L2)j 2(E I / L)j -(E A / L)j 0 0 (E A / L)j 0 0 0 -12(E I / L3)j -6(E I / L2)j 0 12(E I / L3)j -6(E I / L2)j 0 6(E I / L2)j 2(E I / L)j 0 -6(E I / L2)j 4(E I / L)j Çerçeve sistemlerde herhangi bir çubuktaki kesit tesirleri global eksen takımına göre Şekil 2.5’teki gibidir. qj5 + qj5 qj6 + qj6 qj4 + qj4 Pj k Nj Wj j qj2 + qj2 i qj3 + qj3 qj1 + qj1 Şekil 2.5 Global Eksen Takımına Göre Çubuk Ucu Kuvvetleri ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com Bu durumda Şekil 2.3’teki çubuk eksen takımına göre (qj ' + qj ' ) çubuk ucu kuvvetleri, (Rj ) rotasyon matrisi ile çarpılarak global eksen takımına göre çubuk ucu kuvvetleri (qj ' + qj ' ) haline dönüştürülebilir. (qj ' + qj ' ) = ( Rj ) . qj ' + ( Rj ) . qj ' Rotasyon matrisi ( Rj ) şöyle tarif edilir: cos θj -sin θj 0 0 0 0 sin θj -cos θj 0 0 0 0 0 0 1 0 0 0 0 0 0 cos θj -sin θj 0 0 0 0 sin θj cos θj 0 0 0 0 0 0 1 Düğüm noktasındaki deplasmanlar global eksen takımına göre Şekil 2.6 daki gibidir. dj5 dj6 dj4 k j dj2 dj3 i dj1 Şekil 2.6 Global Eksen Takımına Göre Düğüm Noktası Deplasmanları ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com Şekil 2.4 teki çubuk eksen takımına göre olan çubuk ucu deplasmanları (dj ' ), (RjT) matrisi ile global eksen takımına göre çubuk ucu deplasmanları (dj ) vektörünün çarpılmasından elde edilir. dj '= ( RjT ) . dj Bu durumda global eksen takımına göre çubuk ucu kuvvetleri qj ; global eksen takımına göre çubuk ucu deplasmanları (dj ) cinsinden şöyle tarif edilir. qj = ( Rj ) . (sj' ) . ( RjT ) . dj (sj,) = ( Rj ) . ( sj' ) . ( RjT ) Yukarıda tarif edilen ( sj ) global eksen takımına göre çubuk rijitlik matrisidir. Global Eksen Takımına Göre Çubuk Rijitlik Matrisi Tablosu: s(1,1) s(1,2) s(1,3) -s(1,1) -s(1,2) s(1,3) s(2,1) s(2,2) s(2,3) -s(2,1) -s(2,2) s(2,3) s(3,1) s(3,2) s(3,3) -s(3,1) -s(3,2) ½ s(3,3) -s(1,1) -s(1,2) -s(1,3) s(1,1) s(1,2) -s(1,3) -s(2,1) -s(2,2) -s(2,3) s(2,1) s(2,2) -s(2,3) s(3,1) s(3,2) ½ s(3,3) -s(3,1) -s(3,2) s(3,3) Bu matristeki büyüklüklerin tarifi şöyledir: θ : Çubuğun referans açısı A : Çubuğun kesit alanı I : Çubuğun atalet momenti E : Çubuğun elastisite modülü L : Çubuğun boyu s ( 1,1 ) = ( cos θ ) 2 . (AE / L) + (sin θ ) 2 . (12EI / L 3 ) s ( 2,1 ) = ( cos θ ) . ( sin θ ) . [ ( AE / L ) – (12 EI / L 3 ) ] s ( 3,1 ) = - [ ( sin θ ) . (6 EI / L 2 ) ] s ( 1,2 ) = s ( 2,1 ) s ( 2,2 ) = ( sin θ ) 2 . ( AE / L ) + ( cos θ ) 2 . ( 12 EI / L 3 ) s ( 3,2 ) = ( cos θ ) . ( 6 EI / L ) s ( 1,3 ) = s ( 3,1 ) s ( 2,3 ) = s ( 3,2 ) s ( 3,3 ) = ( 4 EI / L ) Yapılan ( sj ) tarifleri iki eksenli bütün çubuk elemanları için geçerlidir. ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com 2.2 Özel Durum Kafes elemanları için çerçevenin özel bir hali demiştik. Çerçevelerde çubuklar birbirlerine mafsalla bağlanırsa ve yükler düğüm noktalarından etki ederlerse böyle sistemleri kafes sistemler olarak inceleyebiliriz.Çubuklar üzerinde herhangi bir yatay ya da düşey yük bulunmamaktadır. Böyle olunca da kafes elemanlarda dönmeler sıfırdır. Şekil 2.4’ü bir kafes elemanı olarak incelersek ; dj3 = 0 d j6 = 0 ; ve I = 0 olarak alınırsa kafes elemanların çubuk ucu kuvvetleri bulunabilir. Daha önceden yazılan (sj) matrisinde I = 0 olarak alınırsa kafes elemanları için şu özel durum meydana gelir. Şöyle ki; I = 0 ( s matrisindeki tüm I = 0 ) s ( 1,1 ) = ( cos θ ) 2 . ( AE / L ) s ( 2,1 ) = s ( 1,2 ) = ( cos θ ) . ( sin θ ) . ( AE / L ) s ( 3,1 ) = s ( 1,3 ) = 0 s ( 2,2 ) = ( sin θ ) 2 . ( AE / L ) s ( 3,2 ) = s ( 2,3 ) = 0 s ( 3,3 ) = 0 2.3 Toplama Yöntemi ile Düğüm Noktası Denklemlerinin Oluşturulması Sistemlerin deplasman metoduyla çözümünde aşağıdaki düğüm noktası denge denklemleri kullanılır: (S) . x + = (S ) : Sistemi oluşturan tüm çubukların ( sj ) rijitlik matrislerinden toplama metodu ile toplanarak oluşturulur. (S) matrisi yapının rijitlik matrisidir ve (SD x SD) boyutunda bir kare matristir. x : Global eksen takımına göre düğüm noktası deplasmanlarını gösteren vektördür. Boyutu (SD x 1) dir. : Çubuğun üzerindeki yüklerden dolayı meydana gelen qj kesit tesirlerinden toplama metodu ile toplanması sonucu elde edilir. Boyutu ( SD x 1) dir. P : Düğüm noktasına etki eden yüklerden oluşur. Boyutu ( SD x 1) dir. Toplama metodunu bir örnek üzerinde şöyle açıklayabiliriz: ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com W 2 1 1 3 2 1 Kesit alanı, elastisite modülü, atalet momenti ve boyu bilinen yukarıdaki ankastre kirişin 1 nolu düğüm noktası referans olarak alınır ve buna göre referans açısı belirlenir. Yukarıdaki sistem için referans açısı θ = 0 olur.Bundan sonra sistemin serbestlik numaralarının bulunduğu dj vekterü yazılır. 0 0 0 dj = 1 2 3 Daha sonra A, E, I, L ve θ değerleri kullanılarak daha önceden ( sj ) matrisi için verilen formüllerde yerine konularak ( sj ) rijitlik matrisi oluşturulur. Bu matris 6x6 boyutunda bir matristir. 0 0 0 1 2 3 0 0 0 1 2 3 ( sj ) ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi CS MÜHENDİSLİK PROJE YAZILIM HİZMETLERİ www.csproje.com Yukarıdaki gibi ( sj ) matrisi oluşturulup serbestlik numaraları üzerine yazılır. Yazılan serbestlik numaraları şekildeki gibi birbirleriyle kesiştirilir.Kesiştikleri yerdeki değer (S) matrisinin o kısmına gider. Yani yukarıdaki örneğe göre serbestlik numarası 1 olan değer, serbestlik numarası 2 olan diğer serbestlik numarası ile kesiştirildiğinde bulunan değer ( S ) matrisinin 2. satır 1. sütununa gider. Bundan sonraki işlemler de böyle devam eder. Eğer bir daha aynı serbestlikler başka bir s j matrisinde kesişecek olursa ( çubuk sayısı 1 den fazla ise ) buradan bulunacak değerler de aynı şekilde ( S ) matrisine gider ve orada bulunan değerle toplanır. Bu şekilde ( S ) matrisi oluşturulur. Q matrisinin toplama metoduyla oluşturulmasına gelince: Bu matrisin oluşturulmasında çubukların üzerindeki yatay ve düşey yükler etkilidir. Yukarıdaki örneğe göre çubuk üzerinde bulunan yayılı yüke göre Daha önce yazılan q matrisi oluşturulur.Şöyle ki ; formüllerinde bu yüklerin değerleri, referans noktalarına olan uzaklıkları ve referans olmayan noktalarına olan uzaklıkları yerlerine yazılarak q matrisi oluşturulur. q = 0 0 wL / 2 0 w L 2 / 12 0 0 1 wL/2 2 - w L 2 / 12 Oluşturulan q 3 matrisinin yanına hangi çubuğa aitse o çubuğun serbestlikleri yukarıdaki gibi yazılır. Her serbestliğin karşısındaki değer Q matrisinin o satırına gider. Eğer birden çubuk varsa , bu çubuklara ait q matrisleri yazılır ve fazla yukarıdaki gibi karşılarına serbestlikleri yazılarak Q matrisine gider.Değerin gittiği satırda başka bir değer varsa o değerle toplanır.Bu şekilde Q matrisi oluşturulur. ___________________________________________________________________________ Can Okan DÜZGÜNOĞLU İnşaat Mühendisi
© Copyright 2026 Paperzz