OTEKON’14
7. Otomotiv Teknolojileri Kongresi
26 – 27 Mayıs 2014, BURSA
BİR HAFİF METRO ARACINDA SÜSPANSİYON
PARAMETRELERİNİN OPTİMİZASYONU İLE KRİTİK HIZIN
ARTIRILMASI
Muzaffer Metin ve Rahmi Güçlü
Yıldız Teknik Üniversitesi, Makine Fakültesi, Makine Müh. Böl., İstanbul
ÖZET
Bu çalışmada İstanbul ulaşımında kullanılan bir hafif metro aracına ait dinamik incelenerek yanal kararlılık için
gerekli olan diferansiyel denklemler çıkartılmıştır. Matlab’te kurulan 27 serbestlik dereceli matematik model
kullanılarak sistemin özdeğer ve kararlılık analizleri gerçekleştirilmiştir. Daha sonra, sistemin kritik hızı tespit edilerek
birincil ve ikincil süspansiyon katılık parametrelerinin hafif metro aracı yanal kararlılığına etkileri araştırılmıştır.
Ayrıca, birincil ve ikincil süspansiyon parametreleri optimize edilerek sistemin kritik hızı artırılmıştır. Yapılan tüm
analizler boş ve dolu araç yükleme koşulları için ayrı ayrı gerçekleştirilmiştir.
Anahtar kelimeler: Hafif metro aracı, dinamik model, kritik hız, optimizasyon.
INCREASING OF THE CRITICAL VELOCITY BY OPTIMIZING SUSPENSION PARAMETERS FOR A
LIGHT RAIL VEHICLE
ABSTRACT
In this study, a light rail vehicle which used in Istanbul transportation is examined dynamically. Required
differential equations are obtained in order to stabilization of the vehicle. By using 27 degrees of freedom mathematical
model which demonstrated in Matlab, eigenvalue and stability analyses of the system are carried out. Then, critical
velocity of the system is determined and the effects of primary and secondary suspension stiffness parameters are
investigated in lateral stability analysis of the light rail vehicle. Besides, critical velocity of the system is increased by
optimizing of primary and secondary suspension parameters. All analyses are performed by considering different
vehicle loading conditions (empty and full).
Keywords: Light rail vehicle, dynamic model, critical velocity, optimization.
1. GİRİŞ
Raylı taşıt mühendisliğinde kararlılık analizi doğrusal
ve doğrusal olmayan yöntemlerle gerçekleştirilebilir.
Doğrusal kararlılık analizlerinin gerçekleştirilebilmesi
için
tekerlek-ray
etkileşimine ait diferansiyel
denklemlerin doğrusallaştırılması gerekir. Tekerlek ve
ray arasındaki yuvarlanma temas mekaniğini tarif eden
denklemlerin doğrusallaştırılmasında iki temel konu
incelenir. Bunlardan ilki, tekerlek ve ray arasındaki
kısıtlara ait geometrik özellikleri tanımlayan geometrik
problemin çözümüdür. Diğeri ise, yuvarlanma yüzeyinde
etkin olan teğetsel kuvvetlerin (sürünme kuvvetleri ve
momenti) hesabıdır. Doğrusal tekerlek-ray temas
modelinin bazı parametreleri, doğrusallaştırmada
kullanılan tekerlek setinin yanal hareketinin genliğine,
ray açıklığına ve tekerlek-ray geometrilerine bağlıdır.
Karakteristik parametre ise tekerleğe ait konikliktir [1].
Tekerlek ve boji hareketleri, belirli bir hızdan sonra
kararsız hale gelmektedir. Buna tekerlek-ray geometrileri,
sürtünme ve sürünme ile ilgili mekanik şartlar neden
olmaktadır. Aracın ileri yöndeki hızı arttıkça sisteme ait
bazı özdeğerler kararsız bölgeye doğru yer değiştirir.
Belirli bir hızda tekerlek setleri ve boji yanal ve yalpa
hareketlerinin beraber görüldüğü sinüzoidal salınımlar
yapmaya başlar. Tasarım değişikliği ile önüne
geçilemeyecek bu duruma “Hunting Fenomeni” adı
verilir [2]. Raylı taşıt dinamiğinde düz yolda kararlılık
analizleri bu temel üzerine bina edilir. Kök-yer eğrisi
yaklaşımı araç hızına (V), eşdeğer konikliğe (λ), tekerlek
çapına (r0), süspansiyon katılıklarına ve sönümlerine,
kütle değişimine bağlı özdeğerlerin hesaplanmasını
sağlar. Sisteme ait köklerin yerlerine bakarak sistemin
kararlılığı hakkında yorum yapılabilir. Eğer sistem
kökleri imajiner eksenin sağına geçerse sistem kararsızdır
denilir. Bir başka ifadeyle, öz değerin gerçek kısmı
pozitif ise öz modlar kararsızdır denilir. Örneğin, araç
hızını belirli adımlarla artırmak suretiyle sistem kökleri
incelenir. Hız arttıkça sisteme ait ilgili kök kararsız
bölgeye doğru hareket edecektir. Bu şekilde sisteme ait
kritik hız tespiti yapılabilir. Sistemin kararsızlığı
hakkında bilgi veren bir diğer parametre ise kritik
sönümdür. Kritik sönümün negatif olması titreşim
genliklerinin sönümlenmek yerine artması anlamına
gelmektedir. Kritik hız analizine benzer şekilde sistemin
kararlılığı farklı tekerlek konikliği, yarıçapı vs.
parametreler için incelenebilir. Doğrusallaştırılmış
kararlılık analizleri raylı taşıt konsept aşamasında ve
tasarım optimizasyonunda kullanılmaktadır. Bu süreçte
birçok parametrenin kritik hıza etkisi incelenmekte ve bu
parametreler için optimum aralıklar bulunmaktadır [3].
2. HAFİF METRO ARACI MATEMATİK
MODELİNİN KURULMASI
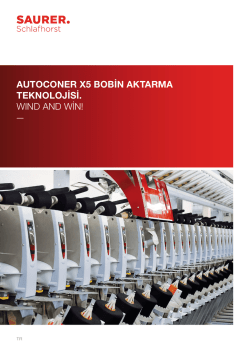
Ele alınan hafif metro aracı genel olarak, iki gövde,
iki motorlu ve bir taşıyıcı boji, altı tekerlek seti ile birlikte
birincil ve ikincil süspansiyonlardan oluşmaktadır.
Bu modelde Ma1, Ma2 hafif metro aracının
gövdelerinin, Mb1-Mb3 bojilerin, Mt1-Mt6 tekerlek
setlerinin kütleleridir. Ia1x, Ia2x, Ia1z, Ia2z gövdelerin, Ib1xIb3x, Ib1z-Ib3z, bojilerin sırasıyla x ve z eksenleri etrafındaki
atalet momentlerini, It1-6x, It1-6z ise tekerlek setlerinin x ve
z eksenleri etrafındaki atalet momentlerini belirtir.
Sırasıyla k1x, k1y ve k1z birincil süspansiyon boylamsal,
yanal ve düşey katılıklarını, c1x, c1y ve c1z ise birincil
süspansiyon boylamsal, yanal ve düşey sönümlerini ifade
eder. İkincil süspansiyon boylamsal, yanal ve düşey
katılıklarını sırasıyla k2x, k2y ve k2z, sönümlerini ise c2x, c2y
ve c2z ifade etmektedir. Bunların yanında, kcx boji ve
bolster arasına boylamsal yönde simetrik yerleştirilmiş
cer kollarına ait katılıklardır. Ayrıca, bojiler ve gövdeler
arasında yanal ve düşey yönde çalışan ek damperler
mevcuttur ve modelde sönüm ifadeleri cdy ve cdz olarak
tanımlanmıştır.
Gövdeleri birbirine bağlayan mafsalda gövdelerin
yanal etkileşimi için, kt ve ct değerlerinde yanal bir katılık
ve sönüm tanımlanmıştır. Gövdelerin üst bölgelerinde
bulunan yuvarlanmayı engelleyici çubuklar ise kroll ve croll
katılık ve sönüm değerlerine sahip bir süspansiyon gibi
çalıştığı düşünülmüştür. Tekerlek setinde temas noktaları
arası mesafenin yarısı e0, bir bojide yer alan tekerlek
setleri arası mesafenin yarısı Lwb ve boji merkezleri arası
mesafe ise Lbb ile tanımlanmıştır.
Lagrange yöntemi kullanılarak çıkartılan dinamik
model için 27 adet diferansiyel denklem elde edilmiştir.
{ }
qj =
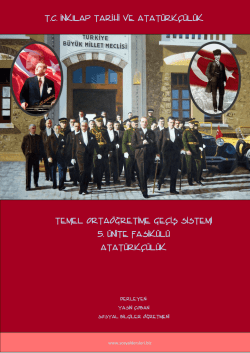
Şekil 1 ve 2’de görülen model 27 serbestlik
derecelidir. Bunlardan yt1-yt6, ψt1-ψt6 tekerlek setlerinin
hareketlerini; yb1-yb3, ψb1- ψb3 ve φb1-φb3 bojilerin
hareketlerini, ya1, ya2, ψa1, ψa2 ve φa1, φa2 ise gövdelerin
hareketlerini temsil etmektedir (Tablo 1).
Tablo 1. Hafif metro aracına ait serbestlikler
Hareketler
Araç
Bileşeni
1. Tekerlek
2. Tekerlek
3. Tekerlek
4. Tekerlek
5. Tekerlek
6. Tekerlek
1. Boji
2. Boji
3. Boji
1. Gövde
2. Gövde
Yanal
(y)
Yuvarlanma
(x etrafında)
Yalpalama
(z etrafında)
yt1
yt2
yt3
yt4
yt5
yt6
yb1
yb2
yb3
ya1
ya2
-
ψt1
ψt2
ψt3
ψt4
ψt5
ψt6
ψb1
ψb2
ψb3
ψa1
ψa2
φb1
φb2
φb3
φa1
φa2
y , y , y , y , y , y , y , y , y , y , y , ψ , , ψ ,
ψ
t1
t2
t3
t4
t5
t6
b1
b2
b3
a1
a2
t1
t2
t3
ψ t 4 , ψ t5 , ψ t 6 , ψ b1 , ψ b2 , ψ b3 , ψ a1 , ψ a 2 , φb1 , φb2 , φb3 , φa1 , φa 2
Mt1 yt1 + Mt 2 yt 2 + Mt3 yt 3 + M t 4y t 4 + M t5y t5 + M t 6y t 6 + M b1yb1
+M y 2 + M y 2 + M y 2 + M y 2 + I φ 2 + I φ 2 + I φ 2
t3x t3
b3 b3
a1 a1
a2 a2
t1x t1
t 2x t 2
1 b 2 b22
Ek =
φ +I φ 2 +I φ 2 +I ψ 2 +I ψ 2 +I ψ 2 +I ψ 2
+I
t 4x t 4
t 4z t 4
t5x t5
t 6x t 6
t1z t1
t 2z t 2
t3z t3
2
ψ 2 +I ψ 2 +I φ 2 +I φ 2 +I φ 2 +I ψ 2 +I ψ 2
+I
t6z t 6
b1x b1
b2 x b 2
b3x b3
b1z b1
b2z b2
t5z t5 2
2
2
+Ib3z ψb3 + Ia1x φ2a1 + Ia2 x φa2
+ Ia1z ψ2a1 + Ia2z ψ a2
ψ −ψ 2
2
2
+ (ψ t2 − ψ b1 ) + (ψ t3 − ψ )
b1 )
2k L 2t1 (
b2
2
2
2
+ (ψ − ψ ) + (ψ − ψ ) + (ψ − ψ )
1x s1y
2
2
2
2
2
2
2
t4
b2
t5
b3
t6
b3
( y t1 − y + Ls1x ψb1 )2 + ( y − y − L s1x ψb1 ) 2
b1
b1
t2
+2k1y + ( y t3 − yb2 + Ls1x ψb2 2) + ( y t 4 − yb2 − L s1x ψb2 2)
+ ( y 5 − yb3 + L s1x ψb3 )2 + ( y t6 − yb3 − Ls1x ψb3 )2
t
2
2
2
λ
λ − φ + λy − φ
y
− φb1 + y t2
b1
e 0 t3
e 0
t1
b2
e0
2
+2k1zL s1y
2
2
2
λ
1
λ
λ
+ e yt4 − φb2 + e y t5 − φb3 + e y t6 − φb3
Ep =
2
0
0
0
2
ψ −ψ ) +
(
( + k )L
b1
2
a1 2
2
+2 k 2x cx s 2y
( ψb2 − ψa1 ) + ( ψb3 − ψ a2 )
( y − y + L ψ ) 2 + ( y − y − L
1
1 1
1
2
a
a b x ψa ) 2
b1
a
ab x a
b
1
1 2
1
+2k 2y
2
+(y − y −L
ψ
b3
a2
a2b4x a2 )
+2k L 2 ( φ − φ )2 + ( φ − φ
2z s2y
b1
a1
b2
(
+ (k
1
)2 + ( φ
−φ
b3
a
a2
)
2
)
roll
+ k t )( y a2
− ya1
+ (k L
roll roll _ z1
2
+
a1b2x
La2b3 a1
ψ
x a2
+
L 2
2
)(φ − φ
+k L
t roll _ z 2
a2
a1
ψ
)
2
)
Şekil 1. Hafif metro aracına ait genel yandan görünüş modeli
Hafif metro aracı genelleştirilmiş koordinatları,
sisteme ait kinetik, potansiyel ve sönüm enerjileri
yukarıda verilmiştir.
3. HAFİF METRO
ANALİZLERİ
ARACI
KRİTİK
HIZ
Bu bölümde, raylı taşıt hızının sistemin kararlılığına
olan etkileri araştırılmıştır. Bunun için öncelikle sistem
karakteristik matrisi durum uzay formunda ifade
edilmiştir. Karakteristik matrise ait özdeğerler bulunarak
kararlılık analizleri yapılmıştır. Raylı taşıtlarda kritik hız
analizleri ile ilgili yapılmış çok sayıda çalışma literatürde
mevcuttur [4–17].
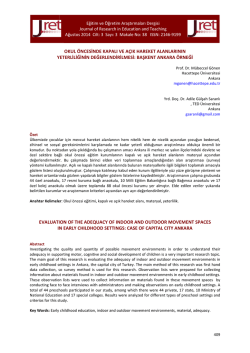
Şekil 3ve 4’te hız 60 – 150 km/sa (16,7 – 41,7 m/s)
arasında 10 km/sa (2,8 m/s) adımla değişirken sırasıyla
yüksüz ve tam yük durumları için sistemin kararlılığı
incelenmiştir.
Kök - Yer Haritası
(V=60 - 150 km/sa, V=16,7 - 41,7 m/s)
Kök - Yer Haritası
(V=60 - 150 km/sa, V=16,7 - 41,7 m/s)
150
40
İmajiner Eksen (rad/s)
İmajiner Eksen (rad/s)
150 km/sa
140 km/sa
130 km/sa
35
100
50
0
-50
30
120 km/sa
110 km/sa
100 km/sa
90 km/sa
80 km/sa
70 km/sa
25
20
15
60 km/sa
10
-100
5
-150
-15000
-10000
-5000
0
-2
0
-1.5
Gerçek Eksen (1/s)
-1
-0.5
0
0.5
1
Gerçek Eksen (1/s)
Şekil 3. 60 – 150 km/sa (16,7 – 41,7 m/s) hız aralığında
köklerin yer değişimi (λ=0,26, r0=0,34 m)
Kök - Yer Haritası
(V=60 - 150 km/sa, V=16,7 - 41,7 m/s)
Şekil 2. Hafif metro aracı üstten ve önden görünüş
modeli
1x
)
t1
( ψt1 − ψ )2 + ( ψ − ψ ) 2 + ( ψ − ψ ) 2 + ( ψ − ψ ) 2
b2
b1
t2
b1
t3
b2
t4
2 + ( ψ − ψ )2 + ( ψ − ψ
t5
t5
λ
t6
b3
( y − yb1 + L ψ ) 2 + ( y − y b1
s1x b1
t2
− L s1x2 ψb1 )
+2c +
(y
b3
2
−y +L ψ
b2
s1x
b2
+ ( y − yb3 + L s1x ψb3
t3
1y
2
λ
t4
b2
)
− y −L ψ
) + (y
s1x
b2
− L s1x ψ)b32
2
λ
2
yt1 − φb1 + yt2 − φb1 + yt3 − φb2
2
e0
e
e
0
0
+2c L
2
1z s1y
2
2
λ
λ
λ
y t5 − φb3 + y t6 − φb3
+ y t4 − φb2 +
e0
e0
e0
2
ψ
+
ψ
2
(
+
c
L
−
ψ
+
ψ
−
ψ
−
ψ
◻
)
2
2
1
( b2 a1 )
b3
a2
a1 )
Es = +2 (c 2x cx ) s 2y ( b1
2
( y − y a1 + L a1b1x ψ a1 )2 + ( y − y a1 − L a1b2x ψ a1 2
(
)
)
b1
+2c
2y
+ ( yb3 − ya2 − L a2b4x ψ a2 2
b2
)
2
φ −φ 2 + φ −φ 2 + φ −φ
+2c
L
2z s 2y
b1
a1
b2
a1
b3
a2
2
+ c + c y
(
)( − y + L ψ + L ψ )
a1
a2b3x a2
a1b2x a1
roll t
a2
2
2
φ
−
φ
+( c
)
+c L
L
2
((
) (
(
) (
)
))
2
130 km/s a
120 km/s a
50
0
110 km/sa
100 km/sa
25
90 km/sa
80 km/sa
20
70 km/sa
60 km/s a
15
-50
2
)2 + ( yt6 − yb3
150 km/s a
140 km/s a
35
30
İmajiner Eksen (rad/s)
s1y
2
40
100
İmajiner Eksen (rad/s)
L 2c
Kök - Yer Haritası
(V=60 - 150 km/sa, V=16,7 - 41,7 m/s)
150
10
-100
5
-150
-15000
0
-10000
-5000
Gerçek Eksen (1/s)
0
500
-2
-1.5
-1
-0.5
0
0.5
1
Gerçek Eksen (1/s)
Şekil 4. 60 – 150 km/sa (16,7 – 41,7 m/s) hız aralığında
köklerin yer değişimi (λ=0,26, r0=0,34 m)
Şekil 3 ve 4’te hızın artmasıyla kararsız bölgeye
yönelen kökler gösterilmiştir. Görüldüğü gibi sistemin
kritik hızı yüksüz durum için yaklaşık 120 km/sa (33,3
m/s) iken tam yük durumu için ise 130 km/sa (36,1
m/s)’tir.
4. BİRİNCİL SÜSPANSİYON KATILIĞININ
roll roll _ z1
t roll _ z 2
a2
a1
y − y +L ψ +L ψ 2 + y − y −L ψ
( b1 a1 dx b1
(
a1
dx b1
a1b1x a1 )
b1
b2
+c
dy
+( y − y
a1
b2
2
+ L dx ψb2 − L a1b2x ψ a1 ) + ( y − y a1 − L dx ψb1 − L a1b2x ψa1 )
+ ( y − y + L dx ψb3 − L a2b4x ψa2 ) + ( y − ya2 − L dx ψb3 − L a2b 4x ψa2
b3 a2
2
b3
+cdzL
dy
2
+ L a1b1x ψa1 )
2
2
( (φ
b1
−φ
a1
+ φb2 − φa1
) (
2
+ φ b3 − φa2
) (
2
))
2
)
KRİTİK HIZA ETKİSİ
Bu bölümde, raylı taşıtta birincil süspansiyon
2
parametrelerinin (k1x, k1y ve k1z) sistemin kararlılığına olan
etkileri araştırılmıştır.
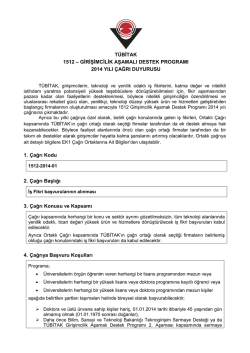
k1x - Kritik Hız Eğrisi
4. İKİNCİL SÜSPANSİYON KATILIĞININ KRİTİK
HIZA ETKİSİ
200
180
Bu bölümde, raylı taşıtta ikincil süspansiyon
parametrelerinin (k2x, k2y ve k2z) sistemin kararlılığına olan
etkileri araştırılmıştır. Hafif metro aracında ikincil
süspansiyon olarak hava yayı kullanılmaktadır. Hava
yayının geometrisi ve yapısından ötürü x ve y
yönlerindeki katılıklar birbirine eşittir. Bu nedenle
analizlerde bu katılıklar birlikte ele alınmıştır.
Kritik Hız (km/sa)
160
140
120
100
80
60
40
Yüksüz Durum
Tam Yük Durumu
20
0
0
1
2
3
4
5
6
7
8
9
10
11
8
k1x (N/m)
x 10
Şekil 5. k1x değeri değişiminin sistem kritik hızına etkisi
(λ=0.26, r0=0.34 m, k1y=440000 N/m, k1z=780000 N/m)
Şekil 8’de ikincil süspansiyon x ve y yönünde çalışan
katılık parametresinin (k2x ve k2y) sistem kritik hızına
etkisi yüksüz ve tam yüklü durumlar için gösterilmiştir.
k
2x
2y
180
k1y - Kritik Hız Eğrisi
200
160
Yüksüz Durum
Tam Yük Durumu
Kritik Hız (km/sa)
180
160
140
Kritik Hız (km/sa)
= k - Kritik Hız Eğrisi
200
120
100
140
120
100
80
60
80
40
60
20
40
0
Yüksüz Durum
Tam Yük Durumu
0
0.5
1
1.5
2
2x
00
0.5
1
1.5
2
2.5
3
3.5
4
4.5
k (N/m)
5
7
x 10
1y
Şekil 6. k1y değeri değişiminin sistem kritik hızına etkisi
(λ=0.26, r0=0.34 m, k1x=13350000 N/m, k1z=780000
N/m)
k1z - Kritik Hız Eğrisi
200
3
3.5
6
x 10
2y
Şekil 8. k2x= k2y değeri değişiminin sistem kritik hızına
etkisi (λ=0.26, r0=0.34 m, k2z= 206000 N/m)
Şekil 9’da ise ikincil süspansiyon z yönünde çalışan
katılık parametresinin (k2z) sistem kritik hızına etkisi
gösterilmiştir. Buna göre k2z arttıkça kararlılık ve sistemin
kritik hızı da bir miktar artmaktadır.
k - Kritik Hız Eğrisi
180
2z
200
160
Yüksüz Durum
Tam Yük Durumu
180
140
160
120
100
Kritik Hız (km/sa)
Kritik Hız (km/sa)
2.5
k = k (N/m)
20
80
60
40
Yüksüz Durum
Tam Yük Durumu
20
0
0
1
2
3
4
5
k1z (N/m)
6
7
8
9
10
140
120
100
80
60
40
8
x 10
Şekil 7. k1z değeri değişiminin sistem kritik hızına etkisi
(λ=0.26, r0=0.34 m, k1x=13350000 N/m, k1y=4400000
N/m)
Şekil 5-7’de sırasıyla birincil süspansiyon x, y ve z
yönlerinde çalışan katılık parametrelerinin (k1x, k1y ve k1z)
sistem kritik hızına etkileri gösterilmiştir.
Buna göre k1x, k1y ve k1z belirli bir değere kadar
arttıkça kararlılık ve sistemin kritik hızı artmaktadır.
Ancak, belirli bir değerden sonra k1y arttıkça kritik hız
yeniden düşüş göstermektedir.
20
0
0
0.5
1
1.5
2
k (N/m)
2z
2.5
3
3.5
6
x 10
Şekil 9. k2z değeri değişiminin sistem kritik hızına etkisi
(λ =0.26, r0=0.34 m, k2z= 206000 N/m)
5. HAFİF METRO ARACI SÜSPANSİYON
KATILIKLARININ OPTİMİZASYONU
Sürüş performansı değerlendirilmesinde incelenmesi
gereken en önemli unsur raylı sistemin kararlılığıdır.
Sürüş emniyeti için sistem incelendiğinde, bu
değerlendirmenin yer değişim cevaplarına bağlı olduğu,
konfor seviyesinin ise ivme cevaplarına bağlı olduğu
10
Kök - Yer Haritası
60
600
50
200 km/sa
İmajiner Eksen (rad/s)
400
200
0
-200
-400
Optimizasyon sonucu elde edilen hata (ISE)
performans değeri 3,27.10-21 olarak bulunmuştur. Tablo
2’de İstanbul Ulaşım A.Ş. bünyesinde kullanılan bir hafif
metro aracı için mevcut süspansiyon katılık değerleri
optimizasyon çalışmasının başlangıç değerleri olarak
alınmıştır. Hafif metro aracı seyir hızı 130 km/sa (36,1
m/s) kabul edilmiştir.
Tablo 2. Hafif metro aracı optimum süspansiyon katılık
değerleri
Katılık
Parametresi
k1x
k1y
k1z
k2x
k2y
k2z
Başlangıç
Değerleri
(N/m)
13350000
4400000
780000
232000
232000
206000
Optimum
Değerler
(N/m)
131847273,860
2940935,095
1287231,310
103821,763
103821,763
2745771,947
Kök - Yer Haritası
Değişim
%
+887,6
-33,16
+65,03
-55,25
-55,25
+1232,90
Kök - Yer Haritası
800
60
600
50
İmajiner Eksen (rad/s)
400
200
0
-200
-400
200 Km/sa
190 Km/sa
40
180 Km/sa
170 Km/sa
30
160Km/sa
150 Km/sa
20
10
-600
-800
-12000 -10000 -8000
-10000
-5000
Gerçek Eksen (1/s)
Burada e hatayı tanımlamaktadır. Hata ise birinci
tekerlek setinin yanal titreşimlerinin “0” değerinden
yaptığı sapmalardır. Yapılan optimizasyon çalışmasına ait
kullanılan veriler ve elde edilen optimum değerler Tablo
2’de gösterilmektedir.
-6000 -4000
-2000
Gerçek Eksen (1/s)
0
20
0
-3
-2
-1
0
1
2
Gerçek Eksen (1/s)
Şekil 10. Yüksüz durum için optimum süspansiyon
katılık parametreleri ile sistemin kritik hız analizi V=10200 km/sa (V=2,8-55,5 m/s)
180 km/sa
30
20
10
-15000
0
190 km/sa
40
-600
-800
SISE = ∫ e2 ( t )dt
İmajiner Eksen (rad/s)
Kök - Yer Haritası
800
İmajiner Eksen (rad/s)
bilinmektedir. Konfor seviyesi düşürülmeden sürüş
emniyeti gözetilecek şekilde raylı taşıta ait maksimum
hızın yükseltilmesinin en kolay yolu süspansiyon
parametrelerinin optimizasyonudur. Bu çalışmada,
süspansiyon parametrelerinin optimizasyonu için aşağıda
belirtilen ISE (Integral of Square Error) fonksiyonu ile
birlikte Genetik Algoritma Toolbox kullanılmıştır. Bu
fonksiyon, birinci (lider) tekerlek setinin yanal
titreşimleri göz önüne alınarak sisteme uygulanmıştır.
0
0
-3
-2
-1
0
(3.41) Gerçek Eksen (1/s)
1
2
Şekil 11. Tam yük durumu için optimum süspansiyon
katılık parametreleri ile sistemin kritik hız analizi V=10200 km/sa (V=2,8-55,5 m/s)
Şekil 10 ve 11’de yüksüz ve tam yük durumları için
optimum süspansiyon katılık parametreleri ile yapılan
hafif metro aracına ait kritik hız analiz sonucu
görülmektedir. Mevcut süspansiyon katılıkları yerine
optimum parametreler kullanıldığında sisteme ait kritik
hızın yüksüz durum için 120 km/sa’tan (33,3 m/s) 160
km/sa (44,4 m/s) hıza tam yük durumu için ise 130
km/sa’tan (36,1 m/s) 190 km/sa (52,8 m/s) hıza çıktığı
görülmektedir. Parametre optimizasyonuna gidilerek en
uygun parametreler doğrultusunda bir tasarıma
gidildiğinde, seyir emniyeti ve hunting salınımları
bakımından sistem kararlılığı önemli ölçüde artmakta ve
sistemin kritik hızı yüksüz durum için %33,3 tam yük
durumu için ise %46,12 civarında artış göstermektedir.
Bunun yanında sistem yer değiştirme ve ivme
cevaplarında önemli düzeyde bir iyileşme olduğundan
sisteme ait sürüş konforunu da iyileştirmektedir.
6. SONUÇ
Temel olarak hafif metro aracının dinamik sürüş
şartlarının iyileştirilmesi ve düz yolda yapabileceği
maksimum hızın artırılması amaçlandığı için, kurulan
yanal modelin hunting (yanal + yalpa) hareketi
bakımından kararlılığı incelenmiştir. Buna göre, sistemin
mevcut kritik hızı tespit edilmiştir. Daha sonra, birincil ve
ikincil süspansiyon katılıklarının, sistem kararlılığına ve
kritik hıza etkileri incelenmiştir. Bu analizler sonucu,
özellikle birincil süspansiyon doğrusal ve düşey yöndeki
(x ve z) katılık değerlerinin sistem kararlılığını önemli
ölçüde etkilediği görülmüştür. Birincil ve ikincil
süspansiyon katılık parametreleri, titreşimleri minimize
etmek ve sistem kararlılığını ve dolayısıyla kritik hızını
artırmak amacıyla optimize edilmiştir.
Mevcut hafif metro aracının kritik hızı yüksüz durum
için 120 km/sa (33,3 m/s) ve tam yük durumu için 130
km/sa (36,1 m/s) olarak tespit edilmiştir. Optimize edilen
parametreler ile düz yolda kritik hız değerlerinin yüksüz
durum için 160 km/sa (44,4 m/s) hıza, tam yük durumu
için ise 190 km/sa (52,8 m/s) hıza çıktığı görülmüştür.
Böylece, kararlılık artırılarak kritik hızda yüksüz durum
için %33,3 tam yük durumu için ise %46,12 civarında
artış gerçekleştirilmiştir.
KAYNAKLAR
1. Garg, V. K. ve Dukkipati R. V., 1984, “Dynamics of
Railway Vehicle Systems”, Academic Pres,
Toronto.
2. Iwnicki, S., 2006, “Handbook of Railway Vehicle”
Dynamics, CRC Pres, Boca Raton.
3. Metin, M., 2013, “Hafif Raylı Sistemlerin
Titreşimleri ve Kontrolü”, Doktora Tezi, Yıldız
Teknik Üniversitesi, Fen Bilimleri
Enstitüsü,
İstanbul.
4. Sharma, R. C., 2011, “Parametric Analysis of Rail
Vehicle
Parameters
Influencing
Ride
Behaviour”, International Journal of Engineering
Science and Technology, 3(8):54–65
5. Polach, O. ve Kaiser, I., 2011, “On Bifurcation
Analysis of Complex Railway Vehicle Models”,
ENOC 2011 Conference, Temmuz 2011, Rome,
İtalya.
6. Mahyuddin, A. I. ve Febriartanto, A. N., 2011,
“Multibody Dynamic Stability Analysis of a
Diesel-Hydraulic Locomotive”, Journal of KONES
Powertrain and Transport, 18(3):219–226.
7. Abood, K. A. ve Khan R. A., 2011, “Hunting
Phenomenon Study of Railway Conventional
Truck on Tangent Tracks due to Change in Rail
Wheel Geometry”, Journal of Engeneering Science
and Technology, 6(2):146–160.
8. Christiansen, L. E. ve True, H., 2010, “On the
Dynamics of Railway Vehicles on Tracks with
Lateral Irregularities”, 12th Mini Conference on
Vehicle System Dynamics Identication and
Anomalies, 193-202, 8-10 Kasım, Budapest.
9. Duda, S., 2010, “Simulation of Railway Vehicle
Motion on the Straight Track”, Journal of
Powertrain and Transportation, 17(1):117–124.
10. Mazilu, T., 2009, “An Analysis of Bogie Hunting
Instability”, U.P.B. Sci. Bull, Series D, 71(2):63–
78.
11. Lee, S. Y. ve Cheng, Y. C., 2005, “Hunting
Stability Analysis of High-Speed Railway Vehicle
Trucks on Tangent Tracks”, Journal of Sound and
Vibration, 282:881–898.
12. Mohan, A. ve Ahmedian M., 2004, “Nonlinear
Investigation of the Effect of Primary Suspension
on the Hunting Stability of a Rail Wheelset”,
Proceedings of the 2004 ASME/IEEE Joint Rail
Conference, 53–61, 6–8 Nisan, Baltimore,
Maryland, USA.
13. Polach, O., 2006, “Comparability of the NonLinear and Linearized Stability Assessment
During Railway Vehicle Design”, Vehicle System
Dynamics, 44:129–138.
14. Wickens, A. H., 1967, “The Dynamics of Railway
Vehicles on Straight Track: Fundamental
Considerations of Lateral Stability”, Proceedings
of the Institution of Mechanical Engineers, 180:2944.
15. Mao, L. ve Asce, L. F., 2013, “Critical Speed and
Resonance Criteria of Railway Bridge Response
to Moving Trains”, Journal of Bridge Engineering,
18:131–141.
16. Simson, S. A., 2006, “Lateral Stability
Performance in Uni-Directional Rollingstock”,
Proceedings of JRC2006 Joint Rail Conference,
209–216, 4-6 Nisan 2006, Atlanta, GA, USA.
17. Molatefi, H., Hetch, M. ve Kadivar M. H., 2006,
“Critical Speed and Limit Cycles in the Empty
Y25-Freight Wagon”, Proceedings of IMechE,
Journal of Rail and Rapid Transit, Part F, 220:347–
359.
© Copyright 2026 Paperzz