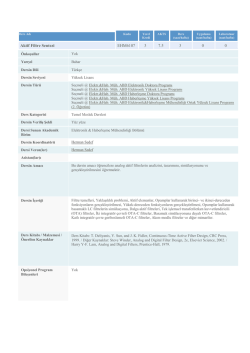
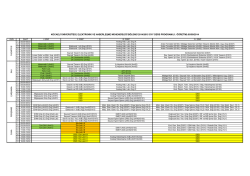
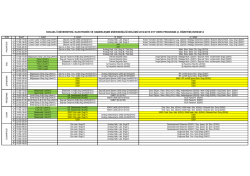
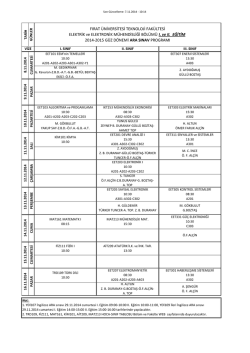
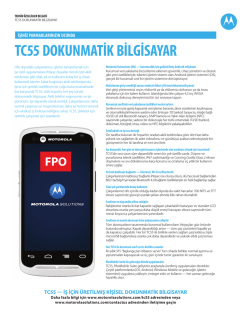
DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI KALICI DURUM HATASI Kontrol sistemlerinin tasarımında üç temel kriter göz önünde bulundurulur: • Geçici Durum Cevabı • Kararlılık • Kalıcı Durum Hatası İlk iki performans spesifikasyonunu daha önce açıkladık. Bugün Kalıcı Durum Hatası kavramı üzerinde duracağız. Kalıcı Durum Hatası, belirli bir giriş sinyali için, zaman sonsuza giderken sistem girişi ile çıkışı arasındaki farktır. Bir sistemin kalıcı durum hatası performansını test etmek için kullanılan bazı standart test sinyalleri vardır. Bu sinyalleri hatırlatalım: 1 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI 2 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Kalıcı durum hatasının grafik olarak gösterimi için aşağıdaki şekli göz önünde bulunduralım. Aşağıda iki farklı sisteme adım girişi uygulanmış ve sistemlerden biri sıfır kalıcı durum hatası üretirken, diğeri sonlu bir kalıcı durum hatası üretmiştir. 3 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Aşağıda ise üç farklı sisteme rampa girişi uygulanmış ve sistemlerden biri sıfır kalıcı durum hatası üretirken, diğeri sonlu bir kalıcı durum hatası üretmiştir. Üçüncüsü ise zaman sonsuza giderken sonsuz bir kalıcı durum hatası üretir. 4 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Birim Geribeslemeli Sistemlerde Kalıcı Durum Hatası Kalıcı durum hatası, sistemin kapalı çevrim transfer fonksiyonundan hesaplanır. Ancak birim geribeslemeli sistemlerde ileri yol transfer fonksiyonu G(s) kullanılarak da kalıcı durum hatası hesaplanabilir. Şimdi aşağıdaki birim geribeslemeli sistemi gözönünde bulunduralım ve hatanın, yani E(s)’in ifadesini türetelim: E ( s) R( s) C ( s) C ( s) E ( s )G ( s ) R( s ) E (s) 1 G( s) Elde ettiğimiz bu ifadeye son değer teoremini uygularsak, kalıcı durum hatası için genel ifadeyi elde etmiş oluruz: sR( s ) e() lim s 0 1 G ( s ) Şimdi sistem girişi R(s) için üç farklı test sinyalinin her birinin uygulanması durumunda, bu kalıcı durum hatasının ifadesini bulalım: 5 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI sR( s ) e() lim s 0 1 G ( s ) Adım Girişi: Eğer R(s)=1/s olursa, kalıcı durum hatasının ifadesi; s(1 / s) 1 e() eadım () lim s 0 1 G ( s ) 1 lim G( s) s 0 Rampa Girişi: Eğer R(s)=1/s2 olursa, kalıcı durum hatasının ifadesi; s(1 / s 2 ) 1 1 e() erampa () lim lim s 0 1 G ( s ) s 0 s sG ( s ) lim sG( s) s 0 Parabol Girişi: Eğer R(s)=1/s3 olursa, kalıcı durum hatasının ifadesi; s(1 / s 3 ) 1 1 e() e parabol () lim lim 2 2 s 0 1 G ( s ) s 0 s s G ( s ) lim s 2G ( s) s 0 6 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Özetle, eadım () 1 1 lim G ( s) s 0 erampa () 1 lim sG ( s) s 0 1 e parabol () lim s 2G ( s) s 0 7 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Ör: Aşağıda verilen sistemin 5u(t), 5tu(t) ve 5t2u(t) girişleri için kalıcı durum hatasını bulunuz. C: 5u(t), yani adım girişi için, girişin Laplace dönüşümü 5/s olur. Bu durumda kalıcı durum hatası: 5 5 5 e() eadım () 1 lim G( s) 1 20 21 s 0 değerini alır. 5tu(t), yani rampa girişin için, girişin Laplace dönüşümü 5/s2 olur. Bu durumda kalıcı durum hatası: 5 5 e() erampa () lim sG( s) 0 s 0 olur. 8 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI değerini alır. 5t2u(t), yani parabol girişi için, girişin Laplace dönüşümü 10/s2 olur. Bu durumda kalıcı durum hatası: 10 10 e() e parabol () 2 lim s G( s) 0 s 0 değerini alır. Yani bu sistem, adım girişi için sonlu, rampa ve parabol girişleri için sonsuz kalıcı durum hatası üretir. 9 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Ör: Aşağıda verilen sistemin 5u(t), 5tu(t) ve 5t2u(t) girişleri için kalıcı durum hatasını bulunuz. C: 5u(t), yani adım girişi için, girişin Laplace dönüşümü 5/s olur. Bu durumda kalıcı durum hatası: 5 5 e() eadım () 0 1 lim G( s) s 0 değerini alır. 5tu(t), yani rampa girişi için, girişin Laplace dönüşümü 5/s2 olur. Bu durumda kalıcı durum hatası: 5 5 1 e() erampa () lim sG( s) 100 20 s 0 olur. 10 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI değerini alır. 5t2u(t), yani parabol girişi için, girişin Laplace dönüşümü 10/s2 olur. Bu durumda kalıcı durum hatası: 10 10 e() e parabol () 2 lim s G( s) 0 s 0 değerini alır. Yani bu sistem, adım girişi için sıfır, rampa girişi için sonlu ve parabol girişi için sonsuz kalıcı durum hatası üretir. Önceki örnek ve bu örnek bir arada gözönünde bulundurulduğunda, bir sistemin adım, rampa ve parabol girişleri için üreteceği kalıcı durum hatasının değerini, sistemdeki integratörün (1/s) varlığı ve üssü belirler. Diğer bir ifadeyle, transfer fonksiyonunun paydasında çarpan durumundaki s’in varlığı ve üssü belirler. Bir önceki örnekte, transfer fonksiyonunda integratör yoktu ve sistem adım girişi için sonlu, rampa ve parabol girişleri için sonsuz kalıcı durum hatası üretti. Bu örnekte sistem bir adet integratöre sahiptir ve adım girişi için sıfır, rampa girişi için sonlu ve parabol girişi için sonsuz bir kalıcı durum hatası üretmektedir. Peki çift integratör (1/s2) olsaydı? 11 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Statik Hata Katsayıları Sistemlerini geçici durum cevabını incelerken yerleşme zamanı, yüzde aşım, tepe zamanı vs. gibi ilgili sistemin geçici durum cevabını karakterize eden bazı performans kriterleri tanımlamıştık. Benzer bir yaklaşım, kalıcı durum hatasının analizinde de kullanılır. Yani bir sistemin kalıcı durum performansını karakterize etmek için bir takım performans kriterleri tanımlanır ve performans kriterleri “Statik Hata Katsayıları” olarak adlandırılır. Peki bu hata katsayıları nasıl tanımlanır? Daha önce, üç farklı test sinyali için kalıcı durum hatasının ifadesini şu şekilde bulmuştuk: 1 eadım () 1 lim G ( s) s 0 1 erampa () lim sG ( s) s 0 1 e parabol () lim s 2G ( s) s 0 Bu üç formülde paydadaki limit ifadeleri Statik Hata Katsayıları olarak tanımlanır. Her birinin ayrı ayrı isimleri ve ifadeleri şu şekildedir: Pozisyon Sabiti, Kp: K p lim G ( s) s 0 Hız Sabiti, Kv: İvme Sabiti, Ka: Kv lim sG( s) s 0 K a lim s 2G( s) s 0 12 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Ör: Aşağıda verilen sistemlerin her biri için standart adım, rampa ve parabol girişlerine karşılık gelen kalıcı durum hatası değerlerini bulunuz. 13 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI 500 2 5 K p lim G ( s) 5.208 s 0 8 10 12 K v lim sG ( s) 0 C: s 0 K a lim s 2G ( s) 0 s 0 1 eadım () 0.161 1 Kp erampa () 1 Kv 1 e parabol () Ka K p lim G ( s) s 0 500 2 5 6 31.25 s 0 8 10 12 K a lim s 2G ( s) 0 K v lim sG ( s) s 0 1 eadım () 0 1 Kp 1 1 erampa () 0.032 Kv 31.25 1 e parabol () Ka 14 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI K p lim G ( s) s 0 K v lim sG ( s) s 0 K a lim s 2G ( s) s 0 eadım () 500 2 4 5 6 7 875 8 10 12 1 0 1 Kp 1 erampa () 0 Kv e parabol () 1 1.14 103 Ka 15 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI SİSTEM TİPİ Negatif birim geribeslemeli sistemlere odaklanmaya devam edelim. Statik hata katsayılarının değeri, G(s) transfer fonksiyonundaki integratör sayısına bağlıdır. Kalıcı durum hatasının değeri G(s) transfer fonksiyonundaki integratör sayısına bağlı olduğu için, bu integratör sayısına bir isim verilir: Aşağıdaki şekilde görüldüğü gibi, paydadaki n’in değeri Sistem Tipi olarak adlandırılır. Yani n=0 ise bu sistem Tip 0 bir sistemdir, n=1 ise bu sistem Tip 1 bir sistemdir, n=2 ise bu sistem Tip 2 bir sistemdir denir. 16 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Aşağıdaki tablo, Sistem Tipi, Statik Hata Katsayısı ve Kalıcı Durum Hatası kavramlarını birbirine bağlar. 17 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Tıpkı yerleşme zamanı, tepe zamanı, yüzde aşım, sönüm oranı gibi performans spesifikasyonların bir sistemin geçici durum cevabını karakterize etmek için kullanılması gibi, statik hata katsayıları da bir sistemin kalıcı durum cevabını karakterize etmek için kullanılabilir. Örneğin bir kontrol sistemi, Kv=1000 gibi bir spesifikasyona sahipse, aşağıdaki sonuçları çıkarabiliriz: • Sistem kararlıdır. • Sistem Tip 1 bir sistemdir. Çünkü sadece Tip 1 bir sistem sonlu bir hız katsayısı değerine sahip olabilir. • Test sinyali rampa sinyalidir. Çünkü hız hatası sonlu bir sabittir. • Kalıcı durum hatasının değeri 1/Kv dir. Şimdi statik hata katsayılarının bir kontrol sisteminin analizi ve tasarımında bir performans kriteri olarak kullanılmasına ilişkin iki örnek yapalım. 18 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Ör: Bir sistemin Kp=1000 şeklinde bir spesifikasyona sahip olması, bu sistem hakkında ne tür bir bilgi verir. C: Sistem kararlıdır. Sistem Tip 0 bir sistemdir çünkü sadece Tip 0 sistemler sonlu bir Kp değerine sahip olabilir. Test sinyali adım sinyalidir. Kalıcı durum hatasının değeri: 1 1 1 e( ) 1 K p 1 1000 1001 19 DÜZCE ÜNİVERSİTESİ TEKNOLOJİ FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EET305 OTOMATİK KONTROL I Dr. Uğur HASIRCI Ör: Aşağıda verilen kontrol sisteminde, kalıcı durumda %10 hata olması için K değerini hesaplayınız. C: Sistem Tip 1 bir sistem olduğu için, sonlu bir kalıcı durum hatası olması için giriş sinyalinin rampa girişi olması gerekir, çünkü sadece rampa girişi Tip 1 bir sistem için sonlu bir kalıcı durum hatası verir. Bu durumda %10 hata olması demek, kalıcı durum hatasının 0.1 olması demektir. Bu durumda; e() 0.1 1 Kv K 5 K v 10 lim sG ( s ) s 0 678 K 672 20
© Copyright 2026 Paperzz