Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
17.05.2014
Sayfa 1
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
NURBS Yüzey Keskinlik Özelliği Gösteriminin Geliştirilmesi
ÖZET
Yüzey uydurma, gerçek nesnenin hesaplamalı modeli elde edildiğinden bu yana 3Boyutlu
yeniden oluşturma işlemlerinde, en önemli adımlardan biri olmuştur. NURBS, esnekliği,
sabitliği ve lokal değişiklik özelliklerine bağlı olarak CAD/CAM uygulamalarında yoğun
olarak kullanılan bir yüzey uydurma metodu haline gelmiştir. NURBS ile uydurmanın
avantajlarına rağmen bu uydurma metodu ile, keskin özelliklerin gösterimini eğriler, kenarlar
ve köşelermiş gibi ilerletmek hala gerekli olmuştur. NURBS parametrelerinin manipülasyonu
fitting esnasında doğrusal olmayan problemlerle ilgilense bile, NURBS’ün doğru
parametreleştirilmesini bulmak keskin özellik gösterimini geliştirmeye/ilerletmeye katkıda
bulunabilir. Metod SOM kullanarak öncelikle fitting datasını clusterlara böler. Daha sonra,
her cluster NURBS’ün ağırlıklarını elde etmek için evrimsel bir strateji kullanır, böylece
fitting hataları minimize edilir ve keskinlik özelliklerinin gösterimi geliştirilmiş olur.
1. Giriş
3Boyutlu yeninden yapılandırma, nesnelerin fiziksel özelliklerini (boyutlarını, hacmini ve
şeklini) korumak şartı ile bilgisayar hafızasında yeniden oluşturulduğu bir işlemdir.3Boyutlu
yeniden yapılandırma; veri toplama, parçalara ayırma (segmentasyon), kayıt (registration),
birleştirme (integration) ve yüzey uydurma adımlarını kapsayan zor bir uygulamadır. Bu
yazıdaki yaklaşım, nesnenin hesaplamalı modeli edileceği yüzey uydurma ile ilgilenir.
NURBS yüzey uydurma modellerinin en çok meşgul olunan şeklidir. Eğrilerin ve yüzeylerin
standart gösterimlerini sağlar. OpenGL ve IGES gibi yaygın olarak kullanılan modern
standartlar tarafından desteklenir ve grafik ve geometrik veri değiş tokuşu için kullanılır.
NURBS yüzey modeli stabiliteye, esnekliğe, lokal değişim özelliklerine sahiptir ve gürültüye
(noise) karşı oldukça sağlamdır. Ancak NURBS’ün bir takım dezavantajları vardır. Input veri
noktaları düzenli bir grid (ızgara) yapı üzerinde haritalanmalıdır. 3Boyutlu nesne yüzeyinin
keskin özelliklerinin yeniden oluşumu, modelin pürüzsüz, yumuşak özelliklerine bağlı olarak
zayıf kalır. Bu yazı özellikler ikinci dezavantaj ile ilgilenecektir.
NURBS gibi parametrik yüzeylerin uydurulması esnasında, parametre değerlerinin seçimi
sonuç yüzeyin şeklinde büyük farklılıklar doğurur. NURBS yüzey uydurma, noktaların
değerlerine, ağırlıklarına ve kontrol noktalarına bağlıdır. Kontrol noktaları, NURBS yüzeyin
takip etmesi gereken geometriyi tanımlar. Ancak ağırlıklar, bir kontrol noktasının sahip
olduğu etkinin lokal derecesini tanımlar. Yani ağırlıklar lokal şekli (local shape) tanımlarken
kontrol noktaları genel şekli (global shape) tanımlar.
NURBS yüzeyler deterministik (belirleyici) algoritmalar kullanılarak oluşturulabilir. Piegl ve
Tiller bu yolla NURBS yüzeyleri oluşturmak üzere bir metot geliştirdiler. NURBS’ü
oluşturmak için bazı metotlar, deterministik şekilde homojen ağırlık faktörleri belirlese bile
bunun sonucunda elde edilen sonuç yüzey, kontrol noktaları ile tanımlanmış geometriye yeteri
kadar yaklaşım göstermez.
NURBS yüzey uydurmasını optimize etmek için bir yol, parametre yüzeyin değerlerini
manipüle etmektir. Fakat bu uydurma işlemi esnasında nonlineer problemle ilgilenmek
anlamına gelir. NURBS parametrelerin manipülasyonu deterministik metotlar aracılığı ile
yapılabilir. Örneğin kontrol noktaları poligon çizgilerinin uzunluklarına orantılı olarak ağırlık
faktörlerini belirleyerek. Ancak NURBS oluşturmak için bu şekilde bir yol yüzeyin lokal
şekline etki edebilir.
17.05.2014
Sayfa 2
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
Geniş sayıda kontrol noktası ile tanımlanmış bir NURBS yüzeyi optimize ederkeni
optimizasyon uzayı oldukça düzensiz olabilir. therefore deterministic methods can easily fall in both
local minimal or do not reach the convergence point . Ayrıca, deterministik metotların
diferensiyellenebilir koşulları yerine getirmesi gerekir. 2004 yılında Cuartas, NURBS
yüzeyleri optimize etmek amacı ile, Levenberg-Marquardt algoritması ile knot vektörleri
manipüle ederek deterministik bir metot sundu. Metodun hem yakınsama problemleri hem de
başlangıç değer problemleri vardır.
Deterministik metodun başarılı olarak uygulanamadığı durumlarda evrimsel algoritmalar gibi
heuristik modeller alternatif olarak düşünülebilir. due to they do not have the restrictions of the
deterministic and have advantages like multiples starting and searching points in a given space, just require to
know the objective function and do not require to know its derivatives nor additional information, Evolutionary
algorithms use probabilistic transition rules instead of deterministic rules and work with coded parameters
instead of real parameters. 2000’de Winert ve Mehnen NURBS yüzeyleri optimize etmek üzere,
pahalı olmasına rağmen güzel sonuçlar veren evrimsel bir algoritma kullandılar.
Bir çok yaklaşım yüzey uydurma tekniklerini ilerletmek üzere evrimsel algoritmalar kullandı.
Bu yaklaşımlar umut verici sonuçlar ürettiler. Gerçek değer optimizasyonuna rağmen
evrimsel stratejiler kullanan yaklaşımlar daha iyi hesaplamalı performansa sahiptirler.
Bu yazıda, NURBS yüzeylerin keskinlik özellik gösteriminin ilerletilmesi için yeni bir metot
sunuldu. Metod ilk olarak fitting datayı SOM kullanarak lokal optimizasyonun sağlandığı
clusterlara böler. Daha sonra her bir cluster için, fitting hatasını azaltmak ve keskin özellik
gösterimini ilerletmek için, gerçek nesnenin global ve lokal yüzey geometrisini koruyarak
noktaların konumlarını değiştirmeden kontrol noktalarının ağırlıklarını elde etmek üzere
evrimsel bir strateji kullanır.
Yazının geri kalanı şu adımları takip eder: Bölüm 2’de, NURBS için vurgulanan yüzey
optimizasyonu ile ilgili çalışmayı sunacağız. Bölüm 3’te, NURBS yüzeylerin temelleri
anlatılacak. Bölüm 4’te, SOM’un kısa bir anlatımı yapılacak. Bölüm 5’te, evrimsel stratejini
temellerinden bahsedilecek. Bölüm 6’da, metodumuzun adımları anlatılacak. Bölüm 7’de,
metodumuzun sonuçları gösterilecek. Bölüm 8’de sonuçlar ve gelecek çalışmalar tartışılacak.
2. İlgili Çalışma
NURBS, eğri ve yüzeylerin standart bir temsilidir ve en çok kullanılan yüzey uydurma
metotlarından biridir. Modelin sahip olduğu dezavantajları çözmeye çalışmak oldukça
önemlidir. Aynı zamanda, NURBS yüzey optimizasyonunu gerçekleştirmek için, hem diğer
yüzey uydurma metotlarının sahip olduğu dezavantajları çözmek için kullanılan teknikleri
anlamak, hem de bu metotları optimize etmek için tekniklerin nasıl kullanıldığını anlamak da
önemlidir.
Fujiwara ve Sawai, insan yüzünün tahminini ilerletmek için üçgensel ağlar kullanarak genetik
algoritmalarla meşgul oldular. Fikir orijinal bir yüzeyi mümkün olduğunca gerçeğe yakın
tahmin etmek, 3Boyutlu üçgensel ağ modelini belirleyen noktaların en iyi konumunu
bulmaktır. Ağları oluşturmak için 2 algoritmadan yararlanıldı. Birincisi; bir seçim uygular ve
sadce bir tekrarda nokta popülasyonunu çiftleştirir. İkincisi; üçgensel ağları bireylermiş gibi
kodlayan bir genetik algoritmadır. Metot yüzeyleri toroidler gibi tahmin etmek için yeterli
değildir.
Cuartas, Yüzey uydurmayı optimize etmek amacı ile NURBS yüzeyin knot vektörlerini
manipüle etmek için bir metot sundu. Knot vektörlerin manipülasyonu Levenberg-Marquardt
17.05.2014
Sayfa 3
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
algoritması kullanılarak yapıldı. Metot hesaplamalı olarak pahalıdır. Düzenli aralıklı veri
üzerine uygulanabilir. Stabilite problemleri vardır ve parametrelere bağımlıdır.
Weinert ve Mehnen, düzenlenmiş 3D veri kümesi için NURBS yüzeyin tahmininden evrimsel
bir strateji kullanır. Fitting hatasını azaltan parametre değerlerini elde etmek için NURBS
yüzeyin ağırlıklarını, içteki kontrol noktalarını ve knot vektörlerini manipüle eder. Kontrol
noktalarının, knotların ve ağırlıkların eş zamanlı manipülasyonu, optimizasyon problemini
daha karmaşık bir hale getirir ve çözüme ulaşım daha zorlaşabilir. Bundan başka, kontrol
noktalarının manipülasyonu orijinal yüzeyin geometrisini saptırabilir ve knotları manipüle
ederek yüzey uydurma hatasının azaltma işlemi, ağırlıkları manipüle ederek azaltmak kadar
kayda değer olmaz.
III. NURBS
NURBS aşağıdaki formül ile tanımlanan bir tensor product işlemidir.
wi,j ağırlığı, Pi,j kontrol noktalarını, Ni,p(u), Nj,q(v)B-Spline harmanlama fonksiyonlarını,
sırasıyla p ve q dereceleri, Su = {u0, … , ur}ve Sv = {v0, … , vr} 2 numaralı yapıya bağlı
olarak Cox ve De Boor formülleri ile rekürsif yolla hesaplanan periyodik olmayan düğümleri
gösterir.
Bir NURBS yüzey Pi,j kontrol noktaları ile tanımlanır. Yani yüzey kontrol noktalarının
hareketine bağlı olarak önceden tahmin edilebilir bir yolla değişebilir. Bu lokal support
17.05.2014
Sayfa 4
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
özelliği olarak bilinir ve sadece lokal olarak kontrol noktasının hareket ettirilmesi ile yüzeyin
etkilenmesine izin verir. NURBS yüzeylerin fitting işlemindeki asıl zorluk, yüzey topolojisini
tanımlamak için kontrol noktalarının sayısını otomatik olarak seçmek ve uygun parametreleri
elde etmektir.
wi,j ağırlık faktörü bir kontrol noktasının yüzeyin şekline lokal olarak ne kadar çok tesir ettiği
tanımlandığından bu yana fitting işleminde önemli bir rol oynar. NURBS yüzeyin ağırlık
faktörleri aynı türden atandığı ve değerleri bir olarak belirlendiği zaman NURBS model BSpline yüzeylere indirgenmiş olur. B-Spline yüzeyler konik yüzeylerin serbest formların
sunumu ile kısıtlanmıştır. Eğer NURBS kullanarak free form yüzeyleri gösteren veri
kümesine yeterince yakın tahminde bulunmak istiyorsak NURBS parametreleri manipüle
etmek gerekmektedir. Ancak daha önce de belirttiğimiz gibi, böyle bir manipülasyon, fitting
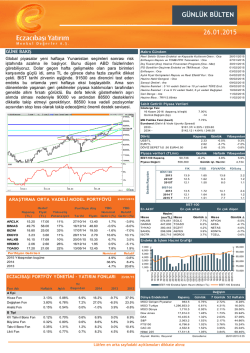
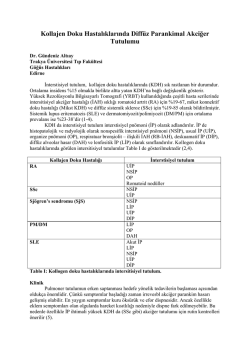
işlemi sırasında nonlineer problemlerle ilgilenmek demektir. Şekil 1 NURBS modeldeki
ağırlık faktörlerinin önemini gösterir. Daireler kontrol noktalarını, çizgiler de bir NURBS
eğriyi gösterir. Ağırlık faktörlerinin yüzeyin lokal geometrisine nasıl etki ettiği önemlidir.
Şekil 1: Ağırlık faktörleri etkisi, (a) Ağırlık faktörü 0’a eşit 3 nokta, (b) Ağırlık faktörü 0.5’e
eşit 3 nokta, (c) Ağırlık faktörü 1’e eşit 3 nokta, (d) Ağırlık faktörü 2’ye eşit 3 nokta
NURBS kullanarak veri noktalarını fitting yaparken bu girişimi minimize etmek için;
If the number of knots an their positions are fixed, the set of weighting factors is known and only the control
points
are considered during the optimization of (3), we have a linear problem of least squares. But if the knots or the
weights are unknown, it will be necessary to solve a non linear problem. In many applications the knots location
is not necessary, therefore knots values are obtained using some heuristic techniques.
17.05.2014
Sayfa 5
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
Burada np kontrol noktası sayısını göstermektedir. Eğer (3) ile gösterilen optimizasyon
sırasında knotların sayısı ve pozisyonları, ağırlık faktörlerinin kümesi bilinir ve sadece kontrol
noktaları
olarak kabul edilirse karesi alınacak bir doğrusal probleme sahip oluruz. Fakat knotlar ya da
ağırlıklar bilinmezse, bir nonlineer problemi çözmek gerekir. Bir çok uygulamada knotların
konumu çok gerekli değildir. Bu nedenle knotların değerleri bir takım heuristic teknikler
kullanarak elde edilir.
4. SOM
Yapay sinir ağları genellikler nöron adı verilen basit hesaplamalı elemanlardan oluşmaktadır.
Nöronlar birbirine çok iyi bağlanmıştır. Nöronlar birbirine bağlanmış katmanlar halinde
dizilmişlerdir. Bir nöron diğer katmanların nöronlarından ve kendi sahip olduğu katmanın
nöronlarından bağlantıları alır.
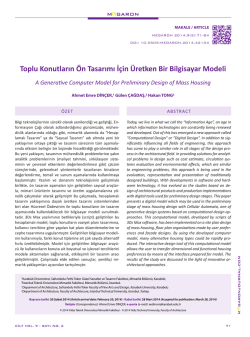
SOM (Self Organizing Map, aynı zamanda Kohonen Ağı olarak da bilinir) tek katmanlı bir
sinir ağıdır. En basit {n1, n2, … , nm} şeklinde gösterilir. Şekil 2’de görüldüğü üzere nöronlar
iki boyutlu olarak dizilir ve bazı nöron komşulukları vardır.
Şekil 2: 2 Boyutlu SOM
Ağın giriş deseni {x1, x2, … , xn} ile gösterilen n boyutlu bir vektör kümesidir. Ağın her bir
nöronunun aynı boyutta giriş deseni olmak üzere bir wi ağırlık vektörü vardır. Basitçe SOM,
Learning Vector Quantization gibi bilinen birçok denetimli değişkenler olmasına rağmen
denetimsiz bir sinir ağıdır. Denetimsiz SOM kümeleme için çalışır ve aşağıdaki öğrenme
prosedürüne sahiptir:
1. Nöronların ağırlıklarını rasgele belirle wi (i = 1, 2, … , m,) Süre t = 1 olsun
2. Yeni input değerlerini belirle {x1, x2, … , xn}
3. Bütün çıkış düğümlerinin giriş noktasına olan Euclid mesafesini hesapla
4. O anki giriş parametresine minimum Euclid mesafesinde olan ni nöronunu bul
5. Bu nöronun komşuluk boyutu (size of neighborhood) N(t)’yi hesapla,
6. Bu komşuluktaki nöronların ağırlıklarını
ile güncelle. Burada η(t) zamanla azalan gain term’dir.
7. t = t + 1 olsun. 2-7 adımları bütün ağ taranıncaya kadar sürdür.
17.05.2014
Sayfa 6
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
5. Evrimsel Stratejiler
Evrimlse Stratejiler (ES) 1964 yılında Berlin Üniversitesi’nde Rechenberg and Schwefel
tarafından deneysel bir optimizasyon tekniği olarak geliştirildi. ES tray to pretend, in contrast with
Genetic Algorithms, the effects of the genetic procedures in the phenotype.Evrimsel stratejiler, evrimsel
algoritmalar olarak bilinen evrimsel programlama, genetik algoritmalar ve genetik
programlamayı içeren bir çeşit olasılıksal sayısal optimizasyon algoritmalarına aittir.
ES’nin (1 + 1) – ES olarak anılan birinci değişkeni, sadece iki birey üzerine çalışır. Bu
bireyler her nesilden ebeveyn ve oğuldur. Oğul birey varyasyonların uygulanması ile
oluşturulur ki buna mutasyon denir. Binomial olarak ebeveyne dağıtılır. (Variance = ve 0’a
eşit ortalama --- with mean equal to zero and variance ---) Oğul birey eğer ebeveynden daha iyi
ise bir sonraki nesilde ebeveyn olabilir, aksi durumda ebeveyn sonraki nesil için hayatta kalır.
2
2
11ES,
her nesil için 1 oğul ve 1 ebeveyn ile, ES ve ,ES
değişkenler için değiştirilir. Bu yeni değişkenler, çaprazlanmış ebeveyn özelliklerine sahip
bireyler oluşturmak için yeni kombinasyon oluşturma fikirleri sunar. Mutasyon ve birey
hesaplamasının ardından, oğul bireyler eğer ebeveyn bireylerden daha iyi ise yer değişir.
Seçim tipine bağlı olarak,
yeni birey, sadece oğul birey popülasyonundan ,ES
seçilir. Ya da yeni birey, ebeveyn ve oğul bireyden ES seçilir. Mutasyon ve
rekombinasyonun yanı sıra, evrimsel arama işlemi sırasında, ES and ,ES
öğrenen bir oto-adaptasyon işlemi ile mutasyonun adım sayısını ve opsiyonel kovaryansı
kontrol eder. ES popülasyonu değiştirmek için durdurma kriterine ulaşılmamasına rağmen 3
ana operatör kullanır.
Rekombinasyon: Ebeveynler içerisindeki bilgiyi çaprazlayarak yeni bireyler üret. Birey
değişken reprezentasyonuna bağlı olarak rekombinasyon amacı içi bazı algoritmalar
uygulanabilir. Ayrık (discrete) rekombinasyon, orta dereceli lokal rekombinasyon, orta
seviyeli global rekombinasyon, nokta atlama (n-point crossover), ve n-nokta atlama (n-point
crossover). Rekombinasyon operatörü tarama uzayının keşfine olanak verir.
Mutasyon: Rekombinasyondan sonra, mutasyon adı verilen küçük varyasyonları ortaya
koyarak oğul bireyler olasılıksal p ile değiştirilir. Mutasyon, yeni muhtemel çözümler ortaya
koymaya ve verilen çözümün (bireyin) yakınsamasına izin verir. Mutasyon (6) ve (7) de
verilen yolu takip eder.
Seçim: Uydurma kriterine bağlı olarak popülasyondaki en iyi bireyleri seç.
Burada N(0,1), ortalama 0 ve varyans 1 ile normal şekilde dağıtılmış rasgele değişken,
,ise mutasyon adımını kontrol eden sabittir.
17.05.2014
Sayfa 7
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
6. Amaçlanan Metot
P = {p1 , p2 , … , pn} gerçek nesneden örneklenmiş, dikdörtgensel topolojisi olan 3Boyutlu
noktaların kümesi ve S = {s1 , s2 , … , sm} P’ye yaklaşan NURBS yüzey olsun. Problemimiz,
(8) ile verilen deapproximation hatasını minimize etmeyi içerir.
Burada dp,s , P ile S yüzeyine yaklaşan NURBS arasındaki toplam mesafedir. parametresi
kullanıcı hata toleransıdır. It is attempted obtain the configuration of S so that (8) is true
NURBS yüzeyin kontrol noktalarının etkisinin lokal olması için, P örneklenmiş noktalar
amaçlanan metodun hesaplamalı maliyetini indirgeyen lokal optimizasyon işlemini devam
ettirecek cluster’lara bölünür.
Optimizasyon işlemi P noktalar kümesinin clusterlanması ile başlar. Bu şekilde clusterlama
SOM ile elde edilir. SOM’un hedefi yüzeyin lokal biçimini bozmadan optimizasyon işleminin
yürütüldüğü homojen bölgeleri bulmaktır. P noktaları SOM’a çalışma örnekleri olarak SOM’a
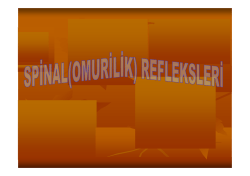
sunulur. Çalışmanın sonunda Şekil 3’te gösterildiği gibi SOM’un optimizasyon işleminde
homojen bölgeleri bulması beklenir.
Şekil 3: SOM tarafından bulunan clusterlar. Veri kümesi z = x2 + y2 fonksiyonundan
örneklenmiştir.
Bir kez Clusterlanmış P, evrimsel strateji () – ES her bir clusterda NURBS’ün lokal
uydurmasını optimize edecektir. Evrimsel strateji konfigürasyonu şu şekilde sürer:
Bireyler: Stratejinin bireyleri, Şekil 4’teki cluster noktalarının ağırlıkları ve mutasyon
adımları ile uydurulur.
17.05.2014
Sayfa 8
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
Şekil 4: Stratejinin Bireyleri
Burada wi kontrol noktalarının ağırlıkları ve imutasyon adımlarının sayısıdır.
Mutasyon operatörü: n mutasyon adım sayısı ile İlişkilendirilmemiş ' mutasyonları 6 ve 7
numaralı formüllere dayanarak bireylere uygulanır.
Rekombinasyon Operatörü: Rekombinasyon operatörü wi hedef değişkenleri için i
parametrelerinden farklıdır. Formül 9’a göre hedef değişkenlere global bir arabulucu
rekombinasyon uygulanır. Oysa i mutasyon adım sayısına Formül 10’a bağlı olarak lokal bir
arabulucu rekombinasyon uygulanır.
Burada i bireyin aleli, bi alel değeridir. rekombinasyon havuzunun boyutudur ve [0,1]
aralığında değişen random sayıdır.
Seçim Operatörü: (8) ile verilen uygunluk fonksiyonuna bağlı olarak en iyi bireylerdir. S
NURBS yüzeyi ve P noktaları arasındaki mesafenin hızlı hesaplanmasını sağlamak için, S’in
noktaları kd-ağaç yapısına depolanır. Böylece P ve S arasındaki en yakın noktaları bulmak
için arama işlemi log(n) sırasında olur.
Aşağıdaki algoritma optimizasyon işlemini özetlemektedir:
SOM kullanarak P’nin clusterlanmasını sağla
For each cluster do
Birey sayısı = cluster sayısı
Popülasyon sayısı =
Popülasyonu rasgele başlat
Uygunluk fonksiyonundaki popülasyonu hesapla
While stop kriterine erişilmediği sürece do
For i = 1 to 0.9 do
Indi = mut (popülation rand (1,))
End For
For i = 1 to 0.1 do
Indi = rec (popülation rand (1,))
End For
Popülasyon = () dan seç
End While
End For
17.05.2014
Sayfa 9
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
7. Deneysel Sonuçlar
Amaçlanan yöntem taranmış ve sentetik veri üzerinde hesaplanmıştır. NURBS optimizasyon
işleminin global ve lokal görünümlerini örneklemek için 3 farklı model kullanıldı. Bunlar,
Ohio State Universitesi’nden elde edilen Angel model ve 2 sentetik model. Yöntem 512 MB
RAM’e sahip 1.4 GHZ Pentium M işlemcili bilgisayar üzerinde uyarlanmıştır.
Yüzey optimizasyon işlemi 15K nokta için 3 dakika sürmüştür. Ortalama 10 generationdan
sonra, evrimsel strateji minimuma ulaşmıştır. P ve optimize edilmiş S NURBS yüzeyi
arasındaki mesafe, optimize edilmemiş S NURBS yüzeyi ile P arasındaki mesafenin ortalama
%14 daha azına ulaşmıştır. Şekil 5; Sentetik data kümesi üzerine yöntemin uygulanmasının
ardından elde edilen işlem sonuçlarını göstermektedir. Şekil 6; taranmış data kümesi üzerine
yöntemin uygulanmasının ardından elde edilen işlem sonuçlarını göstermektedir. Şekil 7;
bizim yöntemimizle elde edilmiş keskin özelliklerin düzeltilmişini gösterir. Şekil 7b; NURBS
yüzey noktaları, kontrol noktalarını Şekil 7a’ya nazaran daha yakın takip eder ve bu da bize
keskin özellik sunumunu iyileştirir. Şekil 7d ve Şekil 7f; sırasıyla Şekil 7c ve Şekil 7e’de
düzleştirilmiş olarak gösterilen keskin özellikleri gösterir. Tablo 1 de yöntemimizin
sonuçlarının bazı istatistiklerini gösterir.
Elde edilen sonuçlar hedeflenen yöntemin etkinliğini göstermektedir. Testler süresince
ES ve ES evrimsel stratejiler kullanıldı. but the perform of the
ES was superior in terms of error reduction. Bu davranışın sebebi şudur: ES
bilgileri ebeveynlerden ve çocuklardan yeni nesillere taşır. Bu bilgi hesaplama işlemi
sırasında en iyi bireyleri içerir. Ancak bu yolla işlem lokal minimalde sorun yaratır. Aksine i
nci ,ES ile en iyi bireylerin bilgileri unutulabilir ve böylece hariç tutulabilir. Çalışma
zamanının terimlerinde ,ES’nin ES’ye nazaran ihmal edilebilir bir avantajı
vardır. Sadece ES nin sonuçları sağlanmıştır. Hesaplama işlemi sırasında, ağırlık
faktörleri [0,1] aralığında sınırlandırılmıştır. Eğer, bir mutasyonun, bir rekombinasyonun ya
da basit bir initializationın sonuçları gibiyse, ağırlık faktörleri bu aralığın dışındadır. Değeri,
duruma göre 0 ya da 1 olarak set edilir
17.05.2014
Sayfa 10
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
17.05.2014
Sayfa 11
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
Orijinal nokta bulutunun şeklini bozmadan doğrulamak için 2 adet metrik tanımlanmıştır: i)
S sınırlı kutusunun köşegen uzunluğu ve P sınırlı kutusunun köşegen uzunluğu arasındaki Ebdl
relative hatası, ii) [16] da verilmiş olan (11) e bağlı olarak Eavg normalleştirilmiş modelleme
hatası. Testlerimizde, relative hata %0.031 ve modelleme hatası 0.01 olmuştur.
Burada di ve N sırasıyla xi datasından uzaklığı ve toplam data sayısını göstermektedir. L
sınırlı kutu uzunluğunu göstermektedir.
17.05.2014
Sayfa 12
Doç.Dr.Erkan ÜLKER, Selçuk Üniversitesi Mühendislik F, Bilgisayar Mühendisliği Bölümü
8. Sonuçlar
NURBS yüzeyin keskin özellik reprezentasyonu için yeni ve basit bir yöntem geliştirilmiştir.
Yöntemimizin düzenli ve düzensiz yüzeyler üzerinde uygulanabilirliğini ve keskin
özelliklerin sağlanabildiğini göstermiştir. Clusterlama adımı, hem işlem hem hafızada,
NURBS yüzeyin kontrol noktalarının lokal etkisine bağlı olarak hesaplama maliyetini
indirgemiştir. Yöntemimiz NURBS yamaları kullanan optimizing yaklaşımlar için kullanışlı
olabilir. Bu yaklaşımlarda, clustering işlemi çok gerekli olmayacaktır. Çünkü optimizasyon
işlemi her bir NURBS yama için sürdürülebilir. ………. Yöntemimizi geliştirmek için bir
yol, Optimizasyon işlemi çalışırken cluster sayısını otomatik olarak saptamaktır.
17.05.2014
Sayfa 13
© Copyright 2026 Paperzz