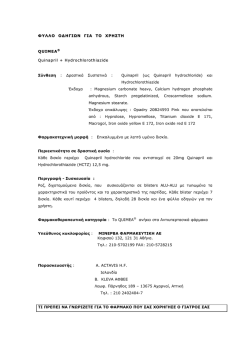
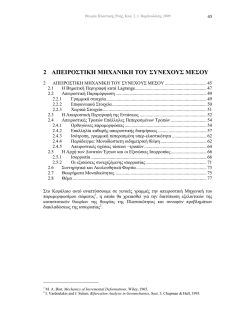
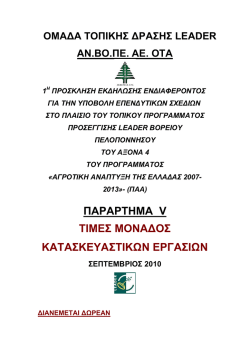
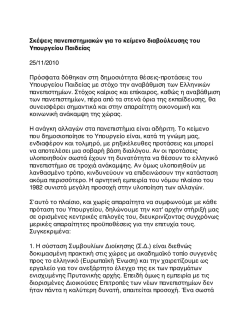
Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 5 1 ΣΤΟΙΧΕΙΑ ΑΠΟ ΤΗ ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ ΚΑΙ ΑΝΑΛΥΣΗ 1 ΣΤΟΙΧΕΙΑ ΑΠΟ ΤΗ ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ ΚΑΙ ΑΝΑΛΥΣΗ 1.1 Συµβολισµοί µε τη χρήση δεικτών 1.2 Συµµετρικά και αντισυµµετρικά συστήµατα 1.3 Συµµετρικό και αντισυµµετρικό µέρος συστήµατος 2ας τάξεως 1.4 Το σύµβολο Levi-Civita και τα σύµβολα Kronecker 1.5 Συµµετρίες συστηµάτων 3ης τάξεως 1.6 Ορίζουσες 1.7 Γραµµικά συστήµατα 1.8 Θετικώς ορισµένες τετραγωνικές µορφές 1.9 Η χαρακτηριστική εξίσωση τετραγωνικού πίνακα 3 × 3 1.10 Ο τελεστής " ∇ " 1.10.1 Ο τελεστής βαθµίδας 1.10.2 Ο τελεστής στροβιλισµού 1.10.3 Ο τελεστής αποκλίσεως 1.11 Παράρτηµα I: Χρήσιµες ταυτότητες µεταξύ διαφορικών τελεστών 1.12 Παράρτηµα ΙΙ: Το θεώρηµα αποκλίσεως 5 7 9 10 11 15 16 18 18 20 22 22 23 25 27 28 Στο Κεφάλαιο αυτό εισάγουµε τη σηµειολογία µε χρήση δεικτών και τη χρήση της αθροιστικής σύµβασης κατά Gauß-Einstein. Ειδικότερα παρουσιάζεται µία σύνοψη ορισµένων βασικών ορισµών και θεωρηµάτων από την περιοχή της Γραµµικής Άλγεβρας1,2,3 και της ∆ιανυσµατικής Ανάλυσης4 1 Akivis M.A. and Goldberg V.V. An Introduction to Linear Algebra & Tensors, Dover, 1972. Pettofrezzo A.J., Matrices and Transformations, Dover, 1966. 3 McConnell A.J., Applications of Tensor Analysis, Dover, 1957. 4 Rutherford D.E., Vector Methods, Dover, 2004. 2 6 Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 © 1. ΣΤΟΙΧΕΙΑ ΑΠΟ ΤΗ ΓΡΑΜΜΙΚΗ ΑΛΓΕΒΡΑ, 2008 Ιωάννης Γ. Βαρδουλάκης, Dr-Ing., Καθηγητής της Μηχανικής στο Ε. Μ. Πολυτεχνείο Τ.Θ. 144, Παιανία 190-02, http://geolab.mechan.ntua.gr/, [email protected] Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 7 1.1 Συµβολισµοί µε τη χρήση δεικτών Συχνά θα συναντήσουµε στη βιβλιογραφία τη συντοµογραφία µιας αλγεβρικής ποσότητας, όπως είναι π.χ. οι συντεταγµένες ενός σηµείου, όπου θα γίνεται χρήση του λεγόµενου βωβού δείκτη. Έτσι όταν θέλουµε να αναφερθούµε στις συντεταγµένες ενός σηµείου στο χώρο, αντί της πλήρους αναλυτικής αναγραφής αυτών, x1 , x2 , x3 (1.1) θα χρησιµοποιήσουµε απλά το συµβολισµό, xi (1.2) αφού προηγουµένως έχουµε καθορίσει ότι ο βωβός (και εµ’ προκειµένω κάτω) δείκτης i θα παίρνει τις τιµές 1, 2 και 3. Επειδή όµως δεν έχουµε καθορίσει ακόµα τη µαθηµατική υπόσταση της ποσότητας xi , δεν µπορούµε να χρησιµοποιήσουµε στο σηµείο αυτό ονοµασίες όπως «διάνυσµα» ή «τανυστής», που έχουµε ακούσει πιθανώς να αναφέρεται σε άλλα Μαθήµατα Μηχανικής και Μαθηµατικών. Εδώ θα αρκεσθούµε στο να αποκαλούµε το µέγεθος xi , ως ένα σύστηµα 1ης τάξεως, αφού εµφανίζει ένα µόνο δείκτη. Επίσης θα παρατηρήσουµε ότι ο δείκτης µπορεί να αναγράφεται είτε κάτω είτε πάνω, οπότε συχνά θα συναντήσουµε το συµβολισµό xi (1.3) αποσαφηνίζοντας ότι στη περίπτωση αυτή ο άνω δείκτης δεν θα πρέπει να εκληφθεί ως εκθέτης. Στο σηµείο αυτό συνηθίζεται να γίνεται αναφορά στις λεγόµενες, α) γραµµικές µορφές, που είναι αθροίσµατα της µορφής 3 L = ∑ ai xi = a1 x1 + a2 x 2 + a3 x 3 (1.4) i =1 και β) δι-γραµµικές ή τετραγωνικές µορφές 3 3 Q = ∑∑ aij x i x j = a11 x1 x1 + a12 x1 x 2 + a13 x1 x 3 + " (1.5) i =1 j =1 Παράλληλα, για τη συµπύκνωση της γραφής µας, θα κάνουµε χρήση της λεγόµενης συµβάσεως αθροίσεως πάνω σε επαναλαµβανόµενο δείκτη κατά Gauß-Einstein, συµφώνως µε την οποία οι παραπάνω γραµµικές ή πολυ-γραµµικές µορφές θα γράφονται χωρίς το σύµβολο του αθροίσµατος και µε προκαθορισµένο το πεδίο τιµών των δεικτών, L = ai x i (i, j = 1, 2,3) Q = aij x i x j (i, j = 1, 2,3) (1.6) Παρατηρούµε ότι η µετονοµασία ενός δείκτη π.χ. από i σε k δεν επιφέρει καµία αλλαγή στο αποτέλεσµα της αθροίσεως, L = ai x i = ak x k (1.7) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 8 Επίσης παρατηρούµε ότι σε κάθε ένα σύστηµα 1ης τάξεως µπορούµε να αντιστοιχίσουµε αµφιµονοσήµαντα ένα µητρώο-γραµµή ( 1× 3 ) που περιέχει τα στοιχεία του εν λόγω συστήµατος ai ↔ {ai } = {a1 , a2 , a3 } (1.8) ή ένα µητρώο-στήλη ( 3 × 1 ), ⎧ x1 ⎫ ⎪ ⎪ ⎪ ⎪ xi ↔ {xi }T = ⎨ x 2 ⎬ ⎪ 3⎪ ⎪⎩ x ⎪⎭ (1.9) Η γραµµική µορφή υπολογίζεται από το µητρωικό γινόµενο γραµµής επί στήλη ⎧ x1 ⎫ ⎪ ⎪ {a1 , a2 , a3 } ⎨ x 2 ⎬ = {ai xi } ↔ L ⎪ x3 ⎪ ⎩ ⎭ (1.10) Σε κάθε σύστηµα 2ας τάξεως µπορούµε να αντιστοιχήσουµε το µητρώο των στοιχείων του, ⎡ a11 aij ↔ [aij ] = ⎢⎢ a21 ⎢⎣ a31 a12 a22 a32 a13 ⎤ a23 ⎥⎥ a33 ⎥⎦ (1.11) η δε τετραγωνική µορφή υπολογίζεται από το αντίστοιχο µητρωικό γινόµενο {x , x , x } 1 2 3 ⎡ a11 ⎢a ⎢ 21 ⎢⎣ a31 a12 a22 a32 a13 ⎤ ⎧ x1 ⎫ ⎪ ⎪ a23 ⎥⎥ ⎨ x 2 ⎬ = a33 ⎥⎦ ⎪⎩ x 3 ⎪⎭ (1.12) ⎧ x1 ⎫ ⎪ ⎪ = { x i ai1 , x i ai 2 , x i ai 3 } ⎨ x 2 ⎬ = { x i aij x j } = {aij x i x j } ↔ Q ⎪ x3 ⎪ ⎩ ⎭ Άσκηση Να σχεδιασθούν οι δευτεροβάθµιες επιφάνειες στο χώρο που δίδονται από τις εξισώσεις, Q = 1 , Εξ. (1.12), για τις κάτωθι περιπτώσεις (Εικ. 1-1): • Ελλειψοειδές: ⎡ a −2 ⎢ [aij ] = ⎢ 0 ⎢ ⎢ 0 ⎣ 0 b −2 0 0⎤ ⎥ 0⎥ ⇒ ⎥ c2 ⎥ ⎦ x12 x2 + 2 + a 2 b2 x32 c2 =1 Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 • • Μονόφυλλο υπερβολοειδές: ⎡ a −2 ⎢ [aij ] = ⎢ 0 ⎢ ⎢ 0 ⎣ ⎡ a −2 ⎢ [aij ] = ⎢ 0 ⎢ ⎢ 0 ⎣ ∆ίφυλλο υπερβολοειδές: 0 b −2 0 0 −b −2 0 0 ⎤ ⎥ 0 ⎥ ⇒ ⎥ −c −2 ⎥ ⎦ 0 ⎤ ⎥ 0 ⎥ ⇒ ⎥ −c −2 ⎥ ⎦ 9 x2 x2 + 2 − 3 =1 a2 b2 c2 x12 x12 a2 − x22 b2 − x32 c2 =1 Παρατηρούµε ότι για Q = 0 το δεύτερο µητρώο οδηγεί στην εξίσωση ενός πραγµατικού κώνου. Εικ. 1-1: (α) Ελλειψοειδές. (β) Μονόφυλλο υπερβολοειδές. (γ) ∆ίφυλλο υπερβολοειδές. 1.2 Συµµετρικά και αντισυµµετρικά συστήµατα Ένα συµµετρικό σύστηµα 2ας τάξεως aij χαρακτηρίζεται από την ιδιότητα ότι η τιµή του δεν αλλάζει αν γίνει εναλλαγή των δεικτών, aij = a ji (1.13) Παρατηρούµε ότι στη θεωρούµενη περίπτωση ο πίνακας των στοιχείων του αντίστοιχου συστήµατος 2ας τάξεως είναι συµµετρικός ως προς την κύρια διαγώνιό του. Π.χ. ένας συµµετρικός πίνακας 3 × 3 περιέχει µόνο 6 ανεξάρτητα στοιχεία, ⎡ a11 aij = a ji ↔ ⎢⎢ a21 ⎢⎣ a31 a12 a22 a32 a13 ⎤ a23 ⎥⎥ = a33 ⎥⎦ ⎡ a11 ⎢c ⎢ ⎢⎣ b c a22 a b⎤ a ⎥⎥ a33 ⎥⎦ (1.14) Ως σύµβολο Kronecker ορίζουµε το εξής συµµετρικό σύστηµα 2ας τάξεως δ ij , 10 Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 ⎧1 if : i = j δ ij = ⎨ ⇒ δ ij = δ ji ⎩0 if : i ≠ j (1.15) Στο σύµβολο Kronecker αντιστοιχεί ο µοναδιαίος πίνακας ⎡δ11 δ12 δ13 ⎤ δ ij = δ ji ↔ [ I ] = ⎢⎢δ 21 δ 22 δ 23 ⎥⎥ = ⎢⎣δ 31 δ 32 δ 33 ⎥⎦ ⎡1 0 0 ⎤ ⎢0 1 0 ⎥ ⎢ ⎥ ⎢⎣0 0 1 ⎥⎦ (1.16) Ένα πλήρως συµµετρικό σύστηµα 3ης τάξεως χαρακτηρίζεται από τις εξής σχέσεις, aijk = akij = a jki = aikj = a jik = akji (1.17) Ένα αντισυµµετρικό σύστηµα 2ας τάξεως χαρακτηρίζεται από την ιδιότητα ότι εναλλαγή των δύο δεικτών επιφέρει αλλαγή του πρόσηµου του, aij = − a ji (1.18) Από τον ορισµό αυτό προκύπτει ότι σε ένα αντισυµµετρικό σύστηµα 2ας τάξεως τα διαγώνια στοιχεία είναι µηδενικά. Π.χ., σε έναν αντισυµµετρικό πίνακα 3 × 3 έχουµε, a11 = a22 = a33 = 0 (1.19) οπότε ο πίνακας αυτός περιέχει µόνο 3 ανεξάρτητα στοιχεία ⎡ a11 aij = −a ji ↔ ⎢⎢ a21 ⎢⎣ a31 a12 a22 a32 a13 ⎤ a23 ⎥⎥ = a33 ⎥⎦ ⎡0 −c −b ⎤ ⎢c 0 −a ⎥ ⎢ ⎥ ⎢⎣b a 0 ⎥⎦ (1.20) Αντιστοίχως ένα πλήρως αντισυµµετρικό σύστηµα 3ης τάξεως ικανοποιεί τις παρακάτω σχέσεις aijk = akij = a jki = − aikj = − a jik = − akji (1.21) 1.3 Συµµετρικό και αντισυµµετρικό µέρος συστήµατος 2ας τάξεως Ως το συµµετρικό και το αντισυµµετρικό µέρος του aij ορίζουµε αντιστοίχως τα συστήµατα a(ij ) = 1 (aij + a ji ) 2 (1.22) a[ij ] = 1 (aij − a ji ) 2 (1.23) Με τη χρήση των συµβόλων Kronecker µπορούµε να κατασκευάσουµε δύο συστηµάτων 4ης τάξεως, που έχουν την ιδιότητα να µετατρέπουν ένα τυχόν σύστηµα 2ας τάξεως σε συµµετρικό και αντισυµµετρικό σύστηµα. Πράγµατι τα συστήµατα Sijkl = 1 (δ ikδ jl + δ ilδ jk ) 2 (1.24) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 Aijkl = 1 δ ik 2 δ jk δ il 1 = (δ δ − δ δ ) δ jl 2 ik jl il jk 11 (1.25) χαρακτηρίζονται αντιστοίχως από τις εξής ιδιότητες, Sijkl akl = a(ij ) (1.26) Aijkl akl = a[ij ] (1.27) Ασκήσεις 1) Να αποδειχθεί ότι ένα πλήρως αντισυµµετρικό σύστηµα 3ης τάξεως έχει µία µόνο µηµηδενική συνιστώσα, ⎧ a if : (ijk ) = cycl (1, 2,3) ⎪ aijk = ⎨− a if : (ijk ) = cycl (2,1,3) ⎪ 0 else ⎩ (1.28) 2) (Ευθύ) Να αποδειχθεί ότι αν το σύστηµα 2ας τάξεως aij είναι αντισυµµετρικό τότε η δι-γραµµική µορφή, aij x i x j = 0 (1.29) 3) (Αντίστροφο) Να αποδειχθεί ότι. αν ισχύει η παραπάνω Εξ. (1.29) για όλες τις τιµές της µεταβλητής xi , τότε το σύστηµα aij είναι αντισυµµετρικό. 4) Έστω wik και ψ ik η µετατόπιση και στροφή της διατοµής αµφιέρειστης ελαστικής δοκού ακαµψίας ( EI ) στη θέση xi λόγω µοναδιαίου φορτίου στη θέση xk (Εικ. 1-2). Να διερευνηθεί και να αιτιολογηθεί αν τα συστήµατα 2ας τάξεως wik και ψ ik είναι συµµετρικά ή όχι. Εικ. 1-2: Η επιρροή µοναδιαίου φορτίου στην παραµόρφωση αµφιέρειστης δοκού 1.4 Το σύµβολο Levi-Civita και τα σύµβολα Kronecker Το λεγόµενο µοναδιαίο αντισυµµετρικό ή αντιµεταθετικό σύστηµα 3ης τάξεως ή σύµβολο Levi-Civita, ε ijk ορίζεται ως εξής: Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 12 ε ijk ⎧ +1 if : (i, j , k ) = cycl (1, 2,3) ⎪ = ⎨ −1 if : (i, j , k ) = cycl (2,1,3) ⎪ 0 else ⎩ (1.30) δηλ. ε123 = ε 231 = ε 312 = 1 , ε 213 = ε132 = ε 321 = −1 , ε112 = " = ε 333 = 0 . Με τη βοήθεια του συµβόλου αυτού το τυχόν αντισυµµετρικό σύστηµα 3ης τάξεως γράφεται ως εξής (γιατί;) aijk = a123ε ijk (1.31) Όπως ήδη αναφέραµε θα χρειασθεί να διακρίνουµε ανάµεσα σε συστήµατα που έχουν δείκτες αναγραµµένους είτε «κάτω», όπως το σύστηµα ε ijk , είτε «πάνω», όπως το σύστηµα ε ijk , το οποίο θα ορισθεί κατ’ αναλογία της (1.30) ως, ε ijk ⎧ +1 if : (i, j , k ) = cycl (1, 2,3) ⎪ = ⎨ −1 if : (i, j , k ) = cycl (2,1,3) ⎪ 0 else ⎩ (1.32) Ένα αντισυµµετρικό σύστηµα 2ας τάξεως προσδιορίζεται πλήρως από ένα σύστηµα 1ης τάξεως, ⎡0 [ωij ] = ⎢⎢ω3 ⎢⎣ω2 −ω3 0 ω1 −ω2 ⎤ −ω1 ⎥⎥ ↔ ωij = −ε ijk ωk 0 ⎥⎦ (1.33) Στην περίπτωση αυτή έχουµε ότι, 1 2 ωl = − ε mnlωmn (1.34) Προφανώς αν ορίσουµε ως ωi′ = −ωi από τις παραπάνω σχέσεις παίρνουµε τις εξής ισοδύναµες εκφράσεις, ωij = ε ijk ωk′ 1 ⇔ ωl′ = ε mnlωmn 2 (1.35) Το γινόµενο των δύο αντισυµµετρικών συστηµάτων 3ης τάξεως, ορίζει το εξής σύστηµα 6ης τάξεως rst ε mnpε rst = δ mnp (1.36) Το σύστηµα αυτό καλείται σύµβολο Kronecker 6ης τάξεως. Για τον προσδιορισµό του rst συστήµατος δ mnp ορίζουµε κατ’ αρχήν τα συµµετρικά σύµβολα Kronecker 2ας τάξεως ⎧1 if : i = j ⎩0 if : i ≠ j δ ij = δ ij = δ i⋅ j = δ ⋅ij = ⎨ Στα σύµβολα Kronecker 2ας τάξεως αντιστοιχεί ο µοναδιαίος πίνακας, π.χ. (1.37) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 ⎡1 0 0 ⎤ δ ij = δ = δ = δ ↔ [ I ] = ⎢⎢ 0 1 0 ⎥⎥ ⎢⎣ 0 0 1 ⎥⎦ ij ⋅j i j ⋅i 13 (1.38) Με τη βοήθεια των συµβόλων Kronecker 2ας τάξεως µπορούµε να ορίσουµε τις πράξεις: α) της αναβιβάσεως, καταβιβάσεως και εναλλαγής ενός δείκτη δ ij x j = xi , δ ij x j = xi , δ i j x j = xi , δ ij x j = xi δ ij x j = xi , δ ij x j = xi , δ i j x j = xi , δ ij x j = xi (1.39) δ ik ak = ai , δ ik a k = a i β) της συστολής5 ενός δείκτη δ ij a ij = a ii = a11 + a 22 + a 33 δ ij aij = aii δ i⋅ j a⋅i j = a⋅ii (1.40) δ ⋅ij a⋅ji = ai⋅i Κάνοντας χρήση του ορισµού του συµβόλου Levi-Civita µπορούµε να αποδείξουµε ότι rst το σύµβολο Kronecker 6ης τάξεως δ mnp παίρνει τις εξής τιµές: rst δ mnp = 0 , όταν δύο ή περισσότεροι δείκτες ταυτίζονται, rst δ mnp = +1 , όταν οι δείκτες (r,s,t) και (mnp) διαφέρουν κατά άρτιο αριθµό µεταθέσεων, rst δ mnp = −1 , όταν οι δείκτες (r,s,t) και (mnp) διαφέρουν κατά περιττό αριθµό µεταθέσεων. Αυτός ο ορισµός µπορεί να συνοψισθεί στην παρακάτω χρήσιµη σχέση, που συνδέει το rst µε µία ορίζουσα της οποίας τα στοιχεία είναι σύµβολα Kronecker 2ας σύµβολο δ mnp τάξεως, rst δ mnp δ mr δ nr δ pr = δ ms δ ns δ ps δ mt δ nt δ pt (1.41) rst Συστολή του συµβόλου δ mnp δίνει το σύµβολο Kronecker 4ης τάξεως, rs rst rsp rsp rs1 rs 2 rs 3 δ mn = δ mnp δ tp = δ mnt δ tp = δ mnp = δ mn 1 + δ mn 2 + δ mn 3 όπου αποδεικνύεται ότι, 5 Αγγλ. contraction, Γερµ. Verjüngung (1.42) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 14 rs δ mn = δ mr δ nr = δ mr δ ns − δ nrδ ms δ ms δ ns (1.43) οπότε rst rs ε mnpε rsp = ε mnpε rstδ tp = δ mnp δ tp = δ mn = δ mr δ ns − δ nrδ ms (1.44) Άρα από τις εξ. (1.25), (1.27) και (1.44) παίρνουµε ότι, a[ij ] = 1 1 (aij − a ji ) = ε ijpε klp akl 2 2 (1.45) Περαιτέρω συστολή του συµβόλου Kronecker 4ης τάξεως οδηγεί στη σχέση του µε το σύµβόλο Kronecker 2ας τάξεως, rn δ mn = 2δ mr (1.46) Επίσης ισχύουν και οι κάτωθι χρήσιµες ταυτότητες, ijk hl δ mnp δ rsthlp = δ rstijk δ mn ijk δ mnp δ rsthnp = 2!δ rstijk δ mh (1.47) ijk δ mnp δ rstmnp = 3!δ rstijk Ασκήσεις Nα αποδειχθεί ότι ε rst = 1 ( r − s )( s − t )( t − r ) , r , s, t ∈ {1, 2,3} 2 (1.48) Να αποδειχθούν οι παρακάτω σχέσεις: δ rr = 3 rst δ mst = 2δ mr δ rstrst = 3! (1.49) rst rst rs δ tmn = δ ntm = δ mn rs mn δ mn a = a rs − a sr rst δ mnp a mnp = a rst − a rts + a str − a srt + a trs − a tsr Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 15 1.5 Συµµετρίες συστηµάτων 3ης τάξεως6 Έστω Aijk ένα τυχόν σύστηµα 3ης τάξεως. Με βάση το σύστηµα αυτό µπορούµε να κατασκευάσουµε ένα πλήρως συµµετρικό σύστηµα 3ης τάξεως, Sijk = 1 ( Aijk + Aikj + Ajki + Ajik + Akij + Akji ) 3! (1.50) και ένα πλήρως αντισυµµετρικό σύστηµα 3ης τάξεως, Qijk = 1 ( Aijk − Aikj + Ajki − Ajik + Akij − Akji ) 3! (1.51) Παρατηρούµε όµως ότι το σύστηµα Rijk = Aijk − ( Sijk + Qijk ) (1.52) δεν είναι το µηδενικό σύστηµα 3ης τάξεως. Πράγµατι το «υπόλοιπο» Rijk µπορεί να αναλυθεί ποικιλοτρόπως. Π.χ. το Rijk αναλύεται σε ένα σύστηµα συµµετρικό ως προς τους δύο πρώτους δείκτες (i, j ) και σε ένα σύστηµα συµµετρικό ως προς τον πρώτο και τρίτο δείκτη (i, k ) , Rijk = Sijk(1) + Sijk(2) (1.53) όπου S (2) ijk ( ) ( ) 2 ( Aijk − Akji ) + ( Ajik − Akij ) 3! 2 = ( Aijk − Ajik ) + ( Akji − Ajki ) 3! Sijk(1) = (1.54) Προφανώς τα συστήµατα αυτά µηδενίζονται όταν το σύστηµα Aijk είναι πλήρως συµµετρικό. Οµοίως µπορούµε να αναλύσουµε το υπόλοιπο Rijk σε ένα σύστηµα αντισυµµετρικό ως προς τους δείκτες (i, k ) και σε ένα σύστηµα αντισυµµετρικό ως προς τους δείκτες (i, j ) Rijk = Qijk(1) + Qijk(2) (1.55) όπου (2) ijk Q 6 ( ) ( ) 2 ( Aijk + Ajik ) − ( Akji + Ajki ) 3! 2 = ( Aijk + Akji ) − ( Ajik − Akij ) 3! Qijk(1) = (1.56) Wade; T. L. and Bruck, R. H. (1944). Types of symmetries. The American Mathematical Monthly, 51, 123-129. Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 16 Τα συστήµατα αυτά µηδενίζονται όταν το σύστηµα Aijk είναι πλήρως αντισυµµετρικό. Συµπέρασµα των ανωτέρω είναι ότι για να είναι ένα σύστηµα 3ης τάξεως συµµετρικό πρέπει το αντισυµµετρικό του µέρος Qijk να µηδενίζεται αλλά αυτό δεν αρκεί, διότι πρέπει επίσης να µηδενίζεται και το υπόλοιπο που συµβολίσαµε µε Rijk . 1.6 Ορίζουσες Ας θεωρήσουµε την ορίζουσα του πίνακα [asr ] a11 A = det[asr ] = asr = a12 a13 a12 a22 a23 a31 a32 a33 (1.57) Παρατηρούµε ότι ισχύουν οι παρακάτω σχέσεις asr = ε ijk a1i a2j a3k anm ε rst = ε ijk air a sj akt (1.58) anm ε rst = ε ijk ari asj atk Ας θεωρήσουµε το ανάπτυγµα της ορίζουσας ως προς τα στοιχεία της πρώτης στήλης, a11 asr = a12 a13 a12 a22 a23 a31 a32 = a11 A11 + a12 A21 + a13 A31 a33 (1.59) Στο ανάπτυγµα αυτό µε Ar1 έχουµε συµβολίσει τις ελάσσονες ορίζουσες των στοιχείων a1r , δηλαδή A11 = (−1)1+1 A = (−1) 1 2 A = (−1) 1 3 2 +1 3+1 a22 a23 a32 = a22 a33 − a23 a32 = ε123 a22 a33 + ε132 a23 a32 = ε1st a2s a3t a33 a12 a23 a31 = − ( a12 a33 − a23 a31 ) = ε 213 a12 a33 + ε 231a23 a31 = ε 2 st a2s a3t (1.60) a33 a12 a22 a31 = a12 a32 − a22 a31 = ε 312 a12 a32 + ε 321a22 a31 = ε 3 st a2s a3t 2 a3 Γενικώς ισχύει η σχέση, ε 123ε rst a2s a3t = 1 1 jk 1 1 jk s t ε ε rst a sj akt = δ rst a j ak 2! 2! οπότε το στοιχείο Ari , παίρνει την εξής µορφή, (1.61) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 Ari = 1 ijk s t δ rst a j ak 2! 17 (1.62) Με τη βοήθεια αυτής της σχέσεως µπορούµε να υπολογίσουµε το παρακάτω ανάπτυγµα, 1 ijk m s t 1 ijk δ mst ar a j ak = ε ε mst arm a sj akt 2! 2! 1 1 ijk p = ε ijk ε rjk aqp = δ rjk aq 2! 2! arm Ami = (1.63) Οπότε παίρνουµε την παρακάτω έκφραση για το ανάπτυγµα µιας ορίζουσας, arm Ami = Aδ ri (1.64) Οµοίως έχουµε και τη σχέση, ami Arm = Aδ ri (1.65) Όταν η ορίζουσα είναι διάφορη του µηδενός ( A ≠ 0 ) τότε το στοιχείο α ri = 1 i Ar A (1.66) είναι το συµπληρωµατικό του στοιχείου air και συµβολίζεται ως, α ri = co ( air ) (1.67) Οπότε, έχουµε τις σχέσεις ami α rm = armα mi = δ ri (1.68) ή ⎡ a11 ⎢ 2 ⎢ a1 ⎢ a13 ⎣ a12 a22 a23 a31 ⎤ ⎡α11 α 21 α 31 ⎤ ⎡1 0 0 ⎤ ⎥⎢ ⎥ a32 ⎥ ⎢α12 α 22 α 32 ⎥ = ⎢⎢0 1 0 ⎥⎥ a33 ⎥⎦ ⎢⎣α13 α 23 α 33 ⎥⎦ ⎢⎣0 0 1 ⎥⎦ (1.69) ⎡ a11 ⎢ 2 ⎢ a1 ⎢ a13 ⎣ a12 a22 a31 ⎤ ⎡ A11 ⎥1⎢ a32 ⎥ ⎢ A12 A a33 ⎥⎦ ⎢⎣ A13 (1.70) ή 3 2 a A21 A22 3 2 A A31 ⎤ ⎡1 0 0 ⎤ ⎥ A32 ⎥ = ⎢⎢0 1 0 ⎥⎥ A33 ⎥⎦ ⎢⎣0 0 1 ⎥⎦ Η παραπάνω σχέσεις ορίζουν τον αντίστροφο ενός τετραγωνικού πίνακα: Έστω, ⎡ a11 [ A] = [asr ] = ⎢⎢ a12 ⎢ a13 ⎣ a12 a22 3 2 a a31 ⎤ ⎥ a32 ⎥ a33 ⎥⎦ (1.71) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 18 Αν η ορίζουσα του πίνακα αυτού είναι διάφορη του µηδενός, δηλαδή αν A = det [ A] ≠ 0 , τότε ορίζουµε τον αντίστροφο του πίνακα [ A] ως ⎡ A11 1 −1 [ A] = ⎢⎢ A12 A 3 ⎢ A1 ⎣ A21 A22 3 2 A A31 ⎤ ⎥ A32 ⎥ A33 ⎥⎦ (1.72) Επίσης µπορούµε να αποδείξουµε τις παρακάτω χρήσιµες σχέσεις, ε rst Ari = 3ε ijk a sj akt ε ijk Ari = ε rst a sj akt (1.73) ∂A = Ari r ∂ai Αντίστοιχο τυπολόγιο µπορεί να αναπτυχθεί και για το σύστηµα amn : a11 A = det[ars ] = ars = a21 a31 a12 a22 a32 a13 a23 a33 1 ijk rst ε ε a js akt 2! amr Ami = arm Aim = Aδ ri Air = (1.74) 1 ir A ( A ≠ 0) A = armα im = δ ri co ( ari ) = α ir = amrα mi 1.7 Γραµµικά συστήµατα Η λύση του γραµµικού συστήµατος amr x m = b r ( A ≠ 0) (1.75) 1 i m Amb A (1.76) είναι, xi = 1.8 Θετικώς ορισµένες τετραγωνικές µορφές Ορισµός: Η τετραγωνική µορφή, Q = amn x m x n , λέγεται θετικώς ορισµένη, όταν ⎧ 0 if : x r = 0 Q=⎨ r ⎩> 0 if : x ≠ 0 (1.77) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 19 Θεώρηµα: Θεωρούµε δύο τετραγωνικές µορφές Q = amn x m x n και S = bmn x m x n , όπου τα συστήµατα amn και bmn είναι συµµετρικά. Επίσης θεωρούµε την ορίζουσα, Λ ( λ ) = λ amn − bmn λ a11 − b11 λ a12 − b12 λ a13 − b13 = λ a21 − b21 λ a22 − b22 λ a23 − b23 λ a31 − b31 λ a32 − b32 λ a33 − b33 (1.78) Αν η τετραγωνική µορφή Q = amn x m x n είναι θετικώς ορισµένη, τότε η εξίσωση, Λ (λ ) = 0 (1.79) έχει πραγµατικές ρίζες. Απόδειξη: Έστω, ρ = α + i β , ρίζα της Εξ. (1.79). Τότε υπάρχει ένα µη-µηδενικό σύστηµα7, z n = x n + iy n που να ικανοποιεί το γραµµικό σύστηµα8 [ ρ amn − bmn ]{ z n } = 0 (1.80) [(α + i β )amn − bmn ]{ x n + iy n } = 0 (1.81) ή Εξισώνοντας τα πραγµατικά και φανταστικά µέρη της παραπάνω εξισώσεως παίρνουµε, α amn x n − β amn y n − bmn x n = 0 (1.82) α amn y n + β amn x n − bmn y n = 0 (1.83) Οπότε πολλαπλασιάζοντας την Εξ. (1.82) επί y m και την Εξ. (1.83) επί x m και αθροίζοντας πάνω στο δείκτη m παίρνουµε, β (amn x n x m + amn y m y n ) = (bmn − bnm ) x m y n = 0 (1.84) Τα στοιχεία x r και y r δεν είναι όλα κατ’ ανάγκην µηδέν και η τετραγωνική µορφή amn x m x n είναι θετικώς ορισµένη, οπότε από την Εξ. (1.84) έπεται ότι β = 0 . ο.ε.δ. Αν πολλαπλασιάσουµε την Εξ. (1.82) επί x m και την Εξ. (1.83) επί y m και αθροίσουµε πάνω στο δείκτη m , τότε παίρνουµε τη σχέση α (amn x n x m + amn y m y n ) = bmn x m x n + bmn y m y n 7 (1.85) Ο n είναι εµ’ προκειµένω ένας άνω δείκτης. Υπενθυµίζουµε ότι ο δείκτης n δεν είναι εκθέτης και ότι πραγµατοποιείται άθροιση πάνω σε κάθε επαναλαµβανόµενο δείκτη. 8 Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 20 Αν τώρα δεχθούµε ότι και η τετραγωνική µορφή bmn x m x n είναι επίσης θετικώς ορισµένη, τότε από την Εξ. (1.85) παίρνουµε ότι, α > 0 . Άρα αν οι τετραγωνικές µορφές amn x m x n και bmn x m x n είναι θετικώς ορισµένες και τα συστήµατα amn , bmn είναι συµµετρικά, τότε οι ρίζες της εξισώσεως, λ amn − bmn = 0 , είναι όλες πραγµατικές και θετικές. 1.9 Η χαρακτηριστική εξίσωση τετραγωνικού πίνακα 3 × 3 Οι ιδιοτιµές ενός τετραγωνικού πίνακα [ Aij ] 3 × 3 ικανοποιούν τη χαρακτηριστική του εξίσωση (γιατί;) Aij − αδ ij = 0 (1.86) ή α 3 − I Aα 2 + II Aα − III A = 0 (1.87) όπου I A , II A και III A είναι οι λεγόµενες βασικές αναλλοίωτες του πίνακα [ A]3×3 , που δίδονται από τις παρακάτω σχέσεις, συναρτήσει των στοιχείων του πίνακα [ A] = [aij ] και των ιδιοτιµών του α i′ (i′ = 1, 2,3) : I A = A11 + A22 + A33 = α1 + α 2 + α 3 II A = A11 A21 A12 A22 + A22 A32 A23 A11 + A33 A31 A11 A12 A13 III A = A21 A 31 A22 A32 A23 = α1α 2α 3 A33 (1.88) A13 = α1α 2 + α 2α 3 + α 3α1 A33 (1.89) (1.90) Θεώρηµα Οι ιδιοτιµές ενός συµµετρικού πραγµατικού πίνακα είναι πραγµατικοί αριθµοί. Απόδειξη Έστω Aij n j = λ n j , Aij = Aji ∈ \ (1.91) και έστω ni = ai + ibi , ni = ai − ibi Από την Εξ. (1.91) παίρνουµε, (1.92) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 Aij ni n j = 21 1 ( Aij ni n j + Aji n j ni ) 2 ( ) 1 Aij ( ai + ibi ) ( a j − ib j ) + Aji ( a j + ib j ) ( ai − ibi ) 2 1 = ( Aij ai a j − iAij ai b j + iAij bi a j + Aij bi b j + Aji a j ai − iAji a j bi + iAji b j ai + Aji b j bi ) 2 1 = ( Aij ai a j − iAij ai b j + iAij bi a j + Aij bi b j + Aij a j ai − iAij a j bi + iAij b j ai + Aij b j bi ) 2 = Aij ai a j + Aij bi b j ∈ \ = αλλά και 1 ( λ n j n j + λ ni ni ) 2 = λ ( ai + ibi )( ai − ibi ) Aij ni n j = = λ ( ai ai − iai bi + ibi ai + bi bi ) = λ ( ai ai + bi bi ) ∈ \ ⇒ λ ∈ \ ο.ε.δ. Ασκήσεις 1. Να γραφεί πρόγραµµα H/Y, που για δεδοµένο συµµετρικό πίνακα να υπολογίζει τις ιδιοτιµές και τα ιδιο-διανύσµατά του συµπεριλαµβανοµένων και των περιπτώσεων ⎡1 2 0 ⎤ πολλαπλών ιδιοτιµών. Π.χ. ο πίνακας: [ Aij ] = ⎢⎢ 2 2 2 ⎥⎥ έχει τις ιδιοτιµές, ⎢⎣ 0 2 3 ⎥⎦ {α i′ } = {−1, 2,5} . 2. Ποια είναι η γεωµετρική σηµασία των ιδιοτιµών και ιδιοδιανυσµάτων ενός συµµετρικού πίνακα Aij σε σχέση µε την αντίστοιχη επιφάνεια 2ας τάξεως που ορίζεται από τη σχέση, {xi }[ Aij ]{x j }T = 1 . Για τη διερεύνηση αυτού του ερωτήµατος σκόπιµο θα ήταν να σχεδιασθεί η αντίστοιχη επιφάνεια στο σύστηµα κυρίων αξόνων του πίνακα [ Aij ] . 22 Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 1.10 Ο τελεστής " ∇ " 9 1.10.1 Ο τελεστής βαθµίδας Εικ. 1-3: Η κάθετος σε σηµείο επί επιφανείας στο χώρο Ας θεωρήσουµε καρτεσιανές συντεταγµένες x1 = x , x2 = y , x3 = z και την εξίσωση, φ ( xi ) = φ ( x, y, z ) = c = const. (1.93) Για διάφορες τιµές της σταθεράς c παίρνουµε µία οικογένεια επιφανειών (Εικ. 1-3). Για κάποια τιµή της σταθεράς c µία από αυτές τις επιφάνειες διέρχεται από δεδοµένο σηµείο P ( x, y, z ) . Η κάθετη στην επιφάνεια αυτή στο σηµείο αυτής P ( x, y, z ) δίδεται από τα συνηµίτονα κατευθύνσεώς της, που όπως γνωρίζουµε από την Αναλυτική Γεωµετρία των επιφανειών είναι ανάλογα των ποσοτήτων ⎧ ∂φ ⎫ ⎧ ∂φ ∂φ ∂φ ⎫ ⎨ ⎬ =⎨ , , ⎬ ⎩ ∂xi ⎭P ⎩ ∂x ∂y ∂z ⎭ P (1.94) Οπότε το διάνυσµα ∂φ G ei ∂xi P (1.95) είναι παράλληλο προς την κάθετο στην επιφάνεια φ ( x, y, z ) = C στο σηµείο P . Έστω dn το µήκος ενός απειροστικού ευθύγραµµου τµήµατος κατά µήκος της καθέτου στην εν λόγω επιφάνεια στο σηµείο P . Τα συνηµίτονα κατευθύνσεως της καθέτου αυτής είναι 9 Το κεφάλαιο αυτό είναι βασισµένο στο αντίστοιχο από το βιβλίο: D.E. Rutherford, Vector Methods, Dover, 2004. Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 ⎧ dx dy dz ⎫ ⎨ , , ⎬ ⎩ dn dn dn ⎭ 23 (1.96) Οπότε το µέγεθος του διανύσµατος που δίδεται από την Εξ. (1.95) είναι ∂φ dx ∂φ dy ∂φ dz ∂φ + + = ∂x dn ∂y dn ∂z dn ∂n (1.97) Εισάγοντας τον τελεστή βαθµίδας σε καρτεσιανές συντεταγµένες, G G ∂ ∇ = ei i ∂x (1.98) Ορίζουµε την βαθµίδα του βαθµωτού µεγέθους φ ( xi ) ως G ∂φ G G grad φ = ∇φ = ei = φ,i ei ∂xi , φ,i = ∂φ ∂xi (1.99) 1.10.2 Ο τελεστής στροβιλισµού Εικ. 1-4: Κλειστή όδευση στο επίπεδο Έστω ένα διανυσµατικό πεδίο, G G G G G v = vi ei = vx ex + v y ey + vz ez (1.100) Θεωρούµε µία κλειστή καµπύλη (C ) = ( ABCD) η οποία περικλείει το σηµείο P ( x, y, z ) G G σε ένα επίπεδο το οποίο είναι κάθετο στο διάνυσµα n = ex (Εικ. 1-4). Επίσης εξασφαλίζουµε όπως η όδευση της καµπύλης αυτής είναι δεξιόστροφη. Κατά µήκος αυτής της καµπύλης (C ) µε παράµετρο το µήκος τόξου s (C ) : x = x( s), y = y ( s), z = z ( s) G ορίζουµε το στοιχειώδες διάνυσµα ds , (1.101) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 24 G ⎛ dx G dy G dz G ⎞ ds = ⎜ ex + ey + ez ⎟ ds ds ds ⎠ ⎝ ds (1.102) Π.χ. για την καµπύλη στην Εικ. 1-4, G G ⎧dyey ( AB), (CD) ds = ⎨ G ⎩ dzez ( BC ), ( DA) (1.103) Με βάση τα παραπάνω ορίζουµε την ποσότητα ΓC = v∫ v ds i (1.104) i (Γ) G η οποία και καλείται η (δεξιόστροφη) κυκλοφορία κατά Kelvin της ποσότητας v (π.χ. ταχύτητας) κατά µήκος της καµπύλης C . G Ένα διανυσµατικό µέγεθος, το οποίο θα συµβολίσουµε ως rot v , και το οποίο G αποκαλούµε στροβιλισµό του διανύσµατος v , έχει συνιστώσα στην κατεύθυνση του G διανύσµατος n που ορίζεται ως εξής: ΓC S →0 S (1.105) lim όπου S είναι το εµβαδόν της επιφάνειας που περικλείεται από την καµπύλη (C ) . Αποδεικνύεται ότι όταν το παραπάνω όριο υπάρχει όντως η Εξ. (1.105) ορίζει ένα διάνυσµα, το οποίο είναι ανεξάρτητο της επιλογής της (C ) . G Βάσει της Εικ. 1-4 η αναλυτική έκφραση του διανύσµατος rotv υπολογίζεται ως εξής: y+β ∫ vi d A i = ∫ vi d A i = ∫ v y dy = 2 β v y ( x, y′, z − γ ) , y − β ≤ y′ ≤ y + β y−β ( AB ) z +γ ∫ v dz = 2γ v ( x, y + β , z′) z z , z − γ ≤ z′ ≤ z + γ z −γ ( BC ) y−β ∫ vi d A i = ∫ vi d A i = ∫ (1.106) v y dy = −2 β v y ( x, y′, z + γ ) , y − β ≤ y′ ≤ y + β y+β ( CD ) z −γ ( DA ) ∫ v dz = −2γ v ( x, y − β , z′) z z , z − γ ≤ z′ ≤ z + γ z +γ Με S = 4βγ Από την Εξ. (1.105) και (1.106) παίρνουµε (1.107) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 2γ vz ( x, y + β , z′ ) − 2γ vz ( x, y − β , z′ ) β →0 γ → 0 4 βγ 2β v y ( x, y′, z + γ ) − 2β v y ( x, y′, z − γ ) − lim lim β →0 γ →0 4 βγ 25 lim lim v ( x, y′, z + γ ) − v y ( x, y′, z − γ ) v ( x, y + β , z ′ ) − v z ( x, y − β , z ′ ) = lim z − lim y β →0 γ →0 2β 2γ ∂ ∂ = v z ( x, y , z ) − v y ( x, y , z ) ∂y ∂z (1.108) Οπότε, G ⎛ ∂v ∂v ⎞ G ⎛ ∂v ∂v rot v = ⎜ z − y ⎟ ex + ⎜ x − z ⎝ ∂z ∂x ⎝ ∂y ∂z ⎠ ⎞ G ⎛ ∂v y ∂vx ⎞ G − ⎟ ez ⎟ ey + ⎜ ∂ ∂ x y ⎠ ⎝ ⎠ (1.109) Συµφώνως προς την Εξ. (1.109) ο διαφορικός τελεστής του στροβιλισµού του G G διανύσµατος v ( xi ) ορίζεται ως το εξωτερικό γινόµενο του τελεστή βαθµίδας και του v , G G G ⎛G ∂ ⎞ G rot v = ∇ × v = ⎜ ek ⎟ × ( vl el ) ⎝ ∂xk ⎠ Παρατηρούµε ότι ο στροβιλισµός του διανύσµατος αντισυµµετρικό µέρος της βαθµίδας του. (1.110) G v ( xi ) . ταυτίζεται µε το 1.10.3 Ο τελεστής αποκλίσεως Εικ. 1-5: Κλειστή επιφάνεια στο χώρο Κατ’ αναλογία µε τη διαδικασία που εκθέσαµε στη προηγούµενη παράγραφο ορίζουµε µία κλειστή επιφάνεια ( S ) , που περιβάλει ένα δεδοµένο σηµείο P ( xi ) στο χώρο. Π.χ. η Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 26 κλειστή επιφάνεια µπορεί να αποτελείται από τις πλευρές ενός ορθογωνίου παραλληλεπιπέδου του οποίου οι πλευρές είναι παράλληλες προς τους άξονες του καρτεσιανού συστήµατος συντεταγµένων (Εικ. 1-5). Γενικώς σε κάθε σηµείο της εν λόγω κλειστής επιφάνειας θεωρούµε το εξωτερικό G µοναδιαίο διάνυσµα n και αν dS συµβολίζει το εµβαδόν του στοιχείο της επιφάνειας G G τότε ορίζουµε το διάνυσµά ndS . Για ένα δεδοµένο διανυσµατικό µέγεθος v ( xi ) ορίζουµε την ποσότητα, QS = ∫∫ vi ni dS (1.111) (S ) G καλείται η ροή του v ( xi ) . G Ένα βαθµωτό µέγεθος, το οποίο θα συµβολίσουµε ως divv , και το οποίο αποκαλούµε G απόκλιση του διανύσµατος v , έχει τιµή που ορίζεται ως εξής: Q G divv = lim S V →0 V (1.112) όπου V είναι ο όγκος που περικλείεται από την επιφάνεια ( S ) . Άσκηση Να αποδειχθεί ότι και ότι, ∂v G ∂v ∂v ∂v divv = x + y + z = i = vi ,i ∂x ∂y ∂z ∂xi (1.113) G G G divv = ∇ ⋅ v (1.114) Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 27 1.11 Παράρτηµα I: Χρήσιµες ταυτότητες µεταξύ διαφορικών τελεστών Μηχανική του Συνεχούς Μέσου, Κεφ. 1., Ι. Βαρδουλάκης 2008 28 1.12 Παράρτηµα ΙΙ: Το θεώρηµα αποκλίσεως10 Θεωρούµε ένα χωρίο V του ℜ 3 που περιβάλλεται από το σύνορο ∂ V . Στο τυχόν σηµείο του συνόρου ορίζουµε την στοιχειώδη επιφάνεια d S µε µοναδιαίο εξωτερικό διάνυσµα n i . Εικ. 1-6: Κανονικό χωρίο εφαρµογής του θεωρήµατος αποκλίσεως Έστω στο χωρίο αυτό µία διανυσµατική συνάρτηση qi = qi ( x k ) ( i , k = 1, 2,3) , που είναι συνεχής και έχει συνεχείς πρώτες παραγώγους. Τότε ισχύει ∂qk dV = ∫ qk nk dS ∂xk (V ) ( ∂V ) (1.115) ∫ div q dV = ∫ (1.116) ∫ ή (V ) q ⋅ n dS ( ∂V ) δηλαδή το ολοκλήρωµα της αποκλίσεως ενός διανυσµατικού πεδίου πάνω στο χωρίο V ισούται µε την συνολική «ροή» του πεδίου δια µέσου του συνόρου αυτού ∂V . Άσκηση Να αποδειχθεί ότι11 ∂ψ dV = ∫ niψ dS ∂xk (V ) ( ∂V ) ∫ 10 (1.117) Το θεώρηµα αυτό παρουσιάστηκε υπό διαφορετικές µορφές από τους Lagrange (1762), Gauss (1813), Ostrogradsky (1831) και Green (1828). Καµιά φορά αποκαλείται και Θεώρηµα Αποκλίσεως (Divergence Theorem). Στη σχετική βιβλιογραφία θα αναζητήσουµε επίσης και τα παρεµφερή Θεωρήµατα Green και Stokes. 11 Hay, G.E., Vector and Tensor Analysis, Dover, p. 149 ff, 1953.
© Copyright 2026 Paperzz