Costruzioni in Zona
Sismica
Lezione 9
Sistemi a più gradi di libertà
Oscillazioni libere non
smorzate
Lezione 9
Oscillazioni libere non smorzate
Espansione modale degli spostamenti
Ogni insieme di N vettori indipendenti può essere utilizzato
come una base per rappresentare qualunque vettore di ordine
N
Segue dunque che I modi naturali di vibrazione possono
essere utilizzati come una base per descrivere i vettori
spostamento:
dove qr sono scalari detti coordinate modali.
Lezione 9
Oscillazioni libere non smorzate
Espansione modale degli spostamenti
Per un determinato vettore u è possibile determinare qr:
E considerando l’ortogonalità dei modi, tutti I termini della
sommatoria svaniscono tranne I termini per i quali r=n:
scalari
Lezione 9
Oscillazioni libere non smorzate
Espansione modale degli spostamenti
Giocano un ruolo importante sia nelle oscillazioni libere sia
nelle oscillazioni forzate
Lezione 9
Oscillazioni libere non smorzate
Espansione modale degli spostamenti
esempio
Espansione modale del vettore u=<1 1 >T
Lezione 9
Oscillazioni libere non smorzate
Espansione modale degli spostamenti
EXAMPLE
Determine the modal expansion of the displacement vector
u=<1 1 >T
Oscillazioni libere in assenza di
smorzamento
Lezione 9
Oscillazioni libere non smorzate
u(t)
Sovrapponendo la risposta di ogni singolo modo
Lezione 9
Oscillazioni libere non smorzate
sono 2N costanti di integrazione che possono essere
determinate sulla base delle condizioni iniziali.
Considerando anche la velocità:
Lezione 9
Oscillazioni libere non smorzate
E ponendo t=0:
Ognuno di questi due set di equazioni rappresenta N
equazioni algebriche nelle incognite An e Bn.
Lezione 9
Oscillazioni libere non smorzate
Considerando che:
Possiamo scrivere:
dove:
Lezione 9
Oscillazioni libere non smorzate
Poichè queste equazioni sono equivalenti, segue:
Lezione 9
Oscillazioni libere non smorzate
conseguentemente:
O in forma compatta:
dove:
È la variazione nel tempo delle coordinate modali, analogo al
caso del sistema a un grado di libertà
Lezione 9
Oscillazioni libere – assenza di smorzamento
esempi
Con riferimento al telaio shear-type riportato in figura,
si determinino:
- Le pulsazioni naturali
- I modi di vibrazione normalizzati rispetto la matrice
delle masse
- La risposta della struttura soggetta a vibrazioni
libere con spostamenti iniziali sia diversi dai modi
e sia uguali ai modi di vibrazione
1
2
0.7071
1.4142
0.4082 0.5774
0.8165 -0.5774
Lezione 9
Svolgimento utilizzando Matlab
%modi di vibrazione e oscillazioni libere - telaio shear type a due piani
clear all
clc
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
DATI
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
k=1;
m=1;
% matrice delle rigidezze
K=[3*k -k; -k k]
%matrice delle masse
M=[2*m 0; 0 m]
K=
3
-1
-1
1
M=
2
0
0
1
Lezione 9
Svolgimento utilizzando Matlab
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
PULSAZIONI E MODI NATURALI DI VIBRAZIONE
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%risoluzione problema agli autovalori
[Fi_p, OM_q_p]=eig(inv(M)*K)
%
%riordino autovalori-autovettori
[OM_q_p,index]=sort(diag(OM_q_p))
OM_q=diag(OM_q_p)
%AUTOVALORI ORDINATI
for ii=1:2
Fi(:,ii)=Fi_p(:,index(ii));
Fi_p =
end
Fi
OM=sqrt(OM_q)
0.7071
-0.7071
0.4472
0.8944
OM_q_p =
2.0000
0
0 0.5000
Lezione 9
Svolgimento utilizzando Matlab
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
PULSAZIONI E MODI NATURALI DI VIBRAZIONE
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%risoluzione problema agli autovalori
[Fi_p, OM_q_p]=eig(inv(M)*K)
%
%riordino autovalori-autovettori
[OM_q_p,index]=sort(diag(OM_q_p))
OM_q=diag(OM_q_p)
%AUTOVALORI ORDINATI
for ii=1:size(OM_q,1)
OM_q_p =
Fi(:,ii)=Fi_p(:,index(ii));
end
Fi
0.5000
OM=sqrt(OM_q)
2.0000
index =
2
1
Lezione 9
Svolgimento utilizzando Matlab
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
PULSAZIONI E MODI NATURALI DI VIBRAZIONE
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%risoluzione problema agli autovalori
[Fi_p, OM_q_p]=eig(inv(M)*K)
%
%riordino autovalori-autovettori
[OM_q_p,index]=sort(diag(OM_q_p))
OM_q=diag(OM_q_p)
%AUTOVALORI ORDINATI
for ii=1:size(OM_q,1)
Fi(:,ii)=Fi_p(:,index(ii));
end
Fi
OM=sqrt(OM_q)
OM_q =
0.5000
0
0 2.0000
Lezione 9
Svolgimento utilizzando Matlab
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
PULSAZIONI E MODI NATURALI DI VIBRAZIONE
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%risoluzione problema agli autovalori
[Fi_p, OM_q_p]=eig(inv(M)*K)
%
%riordino autovalori-autovettori
[OM_q_p,index]=sort(diag(OM_q_p))
OM_q=diag(OM_q_p)
%AUTOVALORI ORDINATI
for ii=1:size(OM_q,1)
Fi =
Fi(:,ii)=Fi_p(:,index(ii));
end
Fi
0.4472
OM=sqrt(OM_q)
0.7071
0.8944 -0.7071
OM =
0.7071
0
0 1.4142
Lezione 9
Svolgimento utilizzando Matlab
%matrice modale delle masse
Mf=Fi'*M*Fi
%matrice modale delle rigidezze
Kf=Fi'*K*Fi
%normalizzazione modi
for ii=1:size(K,2)
Fim(:,ii)=Fi(:,ii)*1/sqrt(Mf(ii,ii));
end
Fim
Fim'*M*Fim
Fim'*K*Fim
Mf =
1.2000
0
0 1.5000
Kf =
0.6000 0.0000
0 3.0000
Lezione 9
Svolgimento utilizzando Matlab
%matrice modale delle masse
Mf=Fi'*M*Fi
%matrice modale delle rigidezze
Kf=Fi'*K*Fi
%normalizzazione modi
for ii=1:size(K,2)
Fim(:,ii)=Fi(:,ii)*1/sqrt(Mf(ii,ii));
end
Fim
Fim'*M*Fim
Fim'*K*Fim
Fim =
0.4082 0.5774
0.8165 -0.5774
ans =
1
0
0
1
ans =
0.5000 -0.0000
0 2.0000
Lezione 9
Svolgimento utilizzando Matlab
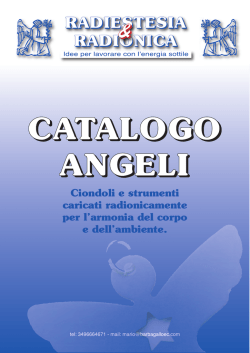
%figure
figure(1)
axis([-3 6 0 5]);
X1=[0 0 0]';
Y1=[0 2 4]';
X1m=[0 Fi(1,1) Fi(2,1)]';
X2m=[0 Fi(1,2) Fi(2,2)]';
hold on
plot(X1, Y1,'-*')
plot(X1m, Y1,'r-*')
plot(X2m, Y1,'g-*')
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
-3
-2
-1
0
1
2
3
4
5
6
Lezione 9
Svolgimento utilizzando Matlab
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
oscillazioni libere
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
%condizioni iniziali
u_0=[Fi(1,1) Fi(2,1)]';
q1_0 =
up_0=[0.0 0.0]';
%
1
%coordinate modali all'istante iniziale
q1_0=(Fi(:,1)'*M*u_0)/(Fi(:,1)'*M*Fi(:,1))
q2_0=(Fi(:,2)'*M*u_0)/(Fi(:,2)'*M*Fi(:,2))
q2_0 =
q1p_0=(Fi(:,1)'*M*up_0)/(Fi(:,1)'*M*Fi(:,1))
q2p_0=(Fi(:,2)'*M*up_0)/(Fi(:,2)'*M*Fi(:,2))
OM_1=OM(1,1);
0
OM_2=OM(2,2);
q1p_0 =
0
q2p_0 =
0
Lezione 9
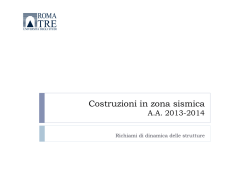
Svolgimento utilizzando Matlab
index=1;
for t=0:0.2:25
u(1:2,index)=(Fi(:,1)*q1_0*cos(OM_1*t)+OM_1^…1*Fi(:,1)*q1p_0*sin(OM_1*t))+(Fi(:,2)*q2_0*cos(OM_2*t)+OM_2^-1*Fi(:,2)*q2p_0*sin(OM_2*t));
T(1,index)=t;
figure (2)
grid on
hold on
1
plot(T(1,:),u(1,:)','b-*')
piano 1
plot(T(1,:),u(2,:)','r-+')
0.8
piano 2
legend('piano 1', 'piano 2')
index=index+1;
0.6
end
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
5
10
15
20
25
Lezione 9
Vibrazioni libere in presenza di
smorzamento
Lezione 9
Vibrazioni libere smorzate
Equazioni del moto:
E condizioni iniziali:
Considerando
smorzamento:
i
modi
di
vibrazione
E pre-moltiplicando per T si ottiene:
in
assenza
di
Lezione 9
Vibrazioni libere smorzate
(*)
La matrice quadrata C può essere o non essere diagonale,
a seconda della distribuzione dello smorzamento nel
sistema.
se C è diagonale, la (*) rappresenta N equazioni
differenziali disaccoppiate nelle N coordinate modali qn, e il
sistema viene detto classicamente smorzato.
Lezione 9
Vibrazioni libere smorzate
(*)
Questi sistemi posseggono gli stessi modi di vibrazione del
caso di assenza di smorzamento
Sistemi con smorzamento tale che C non risulta diagonale
vengono detti non classicamente smorzati: hanno modi di
vibrazione diversi dal caso non smorzato.
Lezione 9
Vibrazioni libere smorzate
esempio 1: sistema non classicamente smorzato
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
Modi naturali
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
C non è diagonali e le equazioni risultano accoppiate!
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
Spostamenti iniziali proporzionali al primo modo di vibrare
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
Spostamenti iniziali proporzionali al secondo modo di vibrare
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
osservazioni:
La deformata iniziale varia durante le oscillazioni.
Lezione 9
Vibrazioni libere smorzate
Esempio 1: sistema non classicamente smorzato
osservazioni:
Il moto per ogni grado di libertà non è più un’armonica
semplice smorzata con un’unica frequenza.
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Solo
una
differente
distribuzione di smorzamento
nella struttura
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Sono le
stesse
È diverso
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
i modi naturali sono gli
stessi
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
C è diagonale e le due equazioni sono disaccoppiate
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Ognuna delle N equazioni differenziali in
coordinate modali risulta:
ha la stessa forma del caso dell’oscillatore semplice.
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Può essere definito un rapporto di
smorzamento per ogni modo di vibrazione
come nell’oscillatore semplice:
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Spostamenti iniziali proporzionali al primo modo di vibrare
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
Spostamenti iniziali proporzionali al secondo modo di vibrare
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
osservazioni:
La deformata iniziale si conserva durante le oscillazioni
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
osservazioni:
Il moto di ogni massa è simile a quello del sistema senza
smorzamento ma l’ampiezza del moto decresce
Lezione 9
Vibrazioni libere smorzate
Esempio 2: sistema classicamente smorzato
osservazioni:
Il moto di ogni piano è un’armonica semplice smorzata con
un’unica frequenza come nel caso dell’oscillatore
semplice.
Lezione 9
Vibrazioni libere smorzate
Soluzione equazioni del moto: sistemi
classicamente smorzati
Lezione 9
Vibrazioni libere smorzate
Dividendo per Mn:
è della stessa forma delle equazioni che governano l’oscillatore
semplice con smorzamento:
where:
Lezione 9
Vibrazioni libere smorzate
L’effetto dello smorzamento sulle frequenze naturali e sui
periodi è trascurabile per valori di n inferiori al 20%
Lezione 9
Vibrazioni libere smorzate
L’ampiezza dello spostamento relativo a ogni grado di libertà
diminuisce ad ogni ciclo è la riduzione dipende dal rapporto di
smorzamento legato ad ogni modo.
Lezione 9
Vibrazioni libere smorzate
Metodi di risoluzione per il problema agli autovalori
Lezione 9
Vibrazioni libere smorzate
Equazione
caratteristica
La valutazione degli N coefficienti può richiedere un elevato
onere computazionale con radici numericamente molto sensibili
Sono stati sviluppati molti metodi basati su
tecniche iterative
Lezione 9
Vibrazioni libere smorzate
Quoziente di Rayleigh
(è diverso da zero poichè m è
definita positiva)
© Copyright 2026 Paperzz