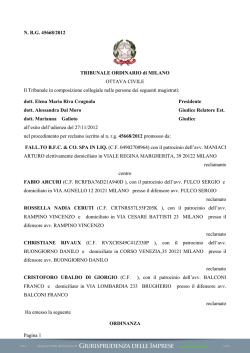
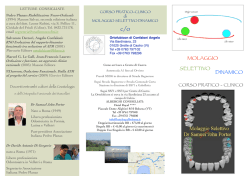
SISTEMI PASSIVI SISTEMA DINAMICO PASSIVO Definizione (sistema dinamico passivo) Il sistema S è passivo se esiste una funzione V(): Rn R semidefinita positiva e continuamente differenziabile, detta funzione di accumulo (“storage function”), tale che: con e definita positiva. SISTEMA DINAMICO PASSIVO Definizione (sistema dinamico passivo) Il sistema S è passivo se esiste una funzione V(): Rn R semidefinita positiva e continuamente differenziabile, detta funzione di accumulo (“storage function”), tale che: con e definita positiva. In particolare, il sistema S è detto: - conservativo se e vale il segno di uguaglianza SISTEMA DINAMICO PASSIVO Definizione (sistema dinamico passivo) Il sistema S è passivo se esiste una funzione V(): Rn R semidefinita positiva e continuamente differenziabile, detta funzione di accumulo (“storage function”), tale che: con e definita positiva. In particolare, il sistema S è detto: - strettamente passivo relativamente all’ingresso, se - strettamente passivo relativamente all’uscita, se - strettamente passivo relativamente allo stato, se ESEMPIO: CIRCUITO RLC y u Ingresso: tensione u Uscita: corrente y Variabili di stato: corrente nell’induttore (x1) e tensione ai capi del condensatore (x2) ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Non sorprendentemente si ha: cioè la potenza immagazzinata è minore o uguale alla potenza in ingresso al circuito RLC (esso è passivo, non ha elementi che generano energia) ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Non sorprendentemente si ha: da cui segue cioè l’incremento di energia immagazzinata non può eccedere quella assorbita dal circuito nello stesso intervallo di tempo. La differenza è l’energia dissipata dai resistori ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è rate di dissipazione dell’energia y u ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Caso 1: Il sistema non dissipa energia y sistema conservativo u ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Caso 2: Il rate di dissipazione è proporzionale a u2 sistema strettamente passivo relativamente all’ingresso ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Caso 3: y u ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Caso 3: Il rate di dissipazione è proporzionale a y2 sistema strettamente passivo relativamente all’uscita ESEMPIO: CIRCUITO RLC Energia immagazzinata nel circuito (storage function): La sua derivata è Caso 4: Il rate di dissipazione è una funzione definita positiva di x sistema strettamente passivo relativamente allo stato SISTEMA STATICO PASSIVO Definizione (sistema statico passivo) Il sistema S è passivo se esistono tali che: SISTEMA STATICO PASSIVO Definizione (sistema statico passivo) Il sistema S è passivo se esistono tali che: In particolare, il sistema S è detto: - strettamente passivo relativamente all’ingresso, se - strettamente passivo relativamente all’uscita, se SISTEMA STATICO PASSIVO Caratterizzazione equivalente di un sistema statico passivo: La condizione è equivalente a Dim: basta porre SISTEMA STATICO PASSIVO Caratterizzazione equivalente di un sistema statico passivo: La condizione è equivalente a con settore nel primo e terzo quadrante y k2 u g(u) k1 u 0 u SISTEMA STATICO PASSIVO Caratterizzazione equivalente di un sistema statico passivo: La condizione è equivalente a Dim: basta porre - strettamente passivo relativamente all’ingresso, se k1>0 - strettamente passivo relativamente all’uscita, se k2 < ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE • • (A,B) raggiungibile & (A,C) osservabile ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE • • (A,B) raggiungibile & (A,C) osservabile Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE • • (A,B) raggiungibile & (A,C) osservabile Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Richiami dalla lezione del 22/10/2014 FUNZIONE DI TRASFERIMENTO STRETTAMENTE REALE POSITIVA Definizione (G(s) strettamente reale positiva) Una funzione di trasferimento G(s) con tutti i poli nel semipiano sinistro aperto è • reale positiva se Re[G(j)] 0, 0 • strettamente reale positiva se G( s- ) reale positiva per qualche > 0 LEMMA DI KALMAN-YAKUBOVICH-POPOV La funzione di trasferimento di un sistema raggiungibile, osservabile ed asintoticamente stabile è strettamente reale positiva se e solo se esistono: • una matrice P nxn simmetrica e definita positiva • un vettore L nx1 • una costante w e una costante positiva > 0 tali che: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: ESEMPIO: SISTEMA DINAMICO LINEARE ASINTOTICAMENTE STABILE Proposizione: Se G(s) è strettamente reale positiva, allora S è strettamente passivo relativamente allo stato. Dim: Prendiamo come storage function: definita positiva ESEMPIO: SISTEMA DINAMICO NON LINEARE AFFINE NEL CONTROLLO ESEMPIO: SISTEMA DINAMICO NON LINEARE AFFINE NEL CONTROLLO Proposizione: Se è possibile trovare una funzione V(): Rn R semidefinita positiva e continuamente differenziabile tale che: con 0 allora S è un sistema passivo. Inoltre, se > 0, allora S è strettamente passivo relativamente all’uscita. ESEMPIO: SISTEMA DINAMICO NON LINEARE AFFINE NEL CONTROLLO Proposizione: Se è possibile trovare una funzione V(): Rn R semidefinita positiva e continuamente differenziabile tale che: con 0 allora S è un sistema passivo. Inoltre, se > 0, allora S è strettamente passivo relativamente all’uscita. Dim: ESEMPIO: SISTEMA DINAMICO NON LINEARE AFFINE NEL CONTROLLO Proposizione: Se è possibile trovare una funzione V(): Rn R semidefinita positiva e continuamente differenziabile tale che: con 0 allora S è un sistema passivo. Inoltre, se > 0, allora S è strettamente passivo relativamente all’uscita. Dim: ESEMPIO: SISTEMA DINAMICO NON LINEARE AFFINE NEL CONTROLLO Proposizione: Se è possibile trovare una funzione V(): Rn R semidefinita positiva e continuamente differenziabile tale che: con 0 allora S è un sistema passivo. Inoltre, se > 0, allora S è strettamente passivo relativamente all’uscita. Dim: LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è passivo con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio stabile nel senso di Lyapunov del sistema libero (cioè con ingresso nullo) LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è passivo con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio stabile nel senso di Lyapunov del sistema libero (cioè con ingresso nullo) Dim: Utilizzo la storage function come funzione di Lyapunov. Se S è passivo e u=0, allora è semidefinita negativa. Infatti LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente allo stato, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente allo stato, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Dim: Utilizzo la storage function come funzione di Lyapunov. Se S è strettamente passivo relativamente allo stato e u=0, allora LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente allo stato, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Dim: Utilizzo la storage function come funzione di Lyapunov. Se S è strettamente passivo relativamente allo stato e u=0, allora E quindi è definita negativa. LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita e osservabile nell’origine, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita e osservabile nell’origine, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Definizione (sistema dinamico osservabile nell’origine) Il sistema S è osservabile nell’origine se è l’unico movimento libero di S compatibile con uscita nulla LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita e osservabile nell’origine, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Dim: Utilizzo la storage function come funzione di Lyapunov. Se S è strettamente passivo relativamente all’uscita e u=0, allora LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita e osservabile nell’origine, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Dim: Utilizzo la storage function come funzione di Lyapunov. Se S è strettamente passivo relativamente all’uscita e u=0, allora Per la condizione di osservabilità nell’origine, l’unica soluzione di che rimane nell’insieme è . Segue la stabilità asintotica per il teorema di La Salle. LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità alla Lyapunov): Se il sistema dinamico S • è strettamente passivo relativamente allo stato oppure è strettamente passivo relativamente all’uscita e osservabile nell’origine, con storage function definita positiva, allora l’origine x=0 è uno stato di equilibrio asintoticamente stabile del sistema libero. Se la storage function è anche radialmente illimitata, allora x=0 è uno stato di equilibrio globalmente asintoticamente stabile del sistema libero LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: se S è strettamente passivo relativamente all’uscita, allora LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: Integrando si ottiene LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: Integrando si ottiene e, dato che V è semidefinita positiva LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: da segue che LEGAME TRA PASSIVITA’ E (ALCUNE FORME DI) STABILITA’ Teorema (passività e stabilità L2): Se il sistema dinamico S • è strettamente passivo relativamente all’uscita, l’operatore causale H: L2e L2e ad esso associato è debolmente limitato e quindi L2-stabile, con guadagno non superiore a 1/. Dim: da E quindi segue che
© Copyright 2026 Paperzz