Cognome e Nome
Matricola
Prova scritta di Controlli Automatici
Corso di Laurea in Ingegneria Gestionale, AA 2013–2014
11 Settembre 2014
Domande a Risposta Multipla
Per ognuna delle seguenti domande a risposta multipla, indicare quali sono le affermazioni
vere V e quali sono le affermazioni false F .
Ad ogni domanda a risposta multipla individuata correttamente sar`a attribuito un punto (max 15
punti).
1. Si consideri il sistema meccanico della seguente figura:
x =0
. . . . . 1. .
. .
.
... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
a
6
a
.6
......Fk
.
K
.....
........
...............
..........
.............
...
.
.
............
......
..........
.............
........
..........
...
a
Fb1
B1
6
Fb2
B2
FM
6
M
a x2
U
?
Si scriva nello spazio seguente la funzione di trasferimento H(s) corrispondente a tale sistema
meccanico, prendendo come ingresso la forza esterna U e come uscita la posizione x2 , essendo
B1 , B2 , M e K rispettivamente i coefficienti di attrito di due ammortizzatori in parallelo, la
massa e il coefficente elastico dei componenti evidenziati nella figura.
Si ipotizzi i valori inziali dei segnali tutti nulli, insieme alle loro derivate successive.
H(s) =
X2 (s)
1
=
2
U (s)
M s + (B1 + B2 )s + K
Commento:
In base ai modelli elementari dei sistemi meccanici:
FM (t) = M x
¨2 (t), Fb1 (t) = B1 x˙ 2 (t), Fb2 (t) = B2 x˙ 2 (t), FK (t) = Kx2 (t)
1
Cognome e Nome
Matricola
essendo x1 = 0 (costante) e trasformando secondo Laplace tali termini, si ottiene (ipotizzando
condizioni inziali tutte nulle):
FM (s) = M s2 X2 (s), Fbi (s) = Bi sX2 (s), (i = 1, 2) FK (s) = KX2 (s)
ricombinando algebricamente i termini, e ricordando che U (s) = FM (s)+Fb1 (s)+Fb2 (s)+FK (s),
otteniamo il risultato sopra enunciato.
2
Cognome e Nome
Matricola
2. La trasformata di Laplace del seguente segnale nel dominio dei tempi:
h(t) =
1
0
se t ∈ [0, 1]
se t < 0 oppure se t > 1
Vale:
V F H(s) =
V F H(s) =
V F H(s) =
1−es
s
1−esτ
s
1−s
s
Commento: La funzione h(t) pu`o essere definita come la somma di un gradino e un gradino
con ritardo pari ad un secondo, cio`e:
h(t) = h0 (t) − h1 (t), dove:
h0 (t) =
1
0
se t ≥ 0
se t < 0
e
h1 (t) = h0 (t − 1) =
1
0
se t ≥ 1
se t < 1
In base alle propriet`
a della trasformatata di Laplace del segnale ritardato, si ha: derivata di una
funzione:
L {h0 (t) − h0 (t − 1)} =
1 e−s
1 − e−s
−
=
s
s
s
per cui nessuna delle risposte `e corretta.
3. Si consideri il sistema descritto dalla seguente funzione di trasferimento:
G(s) =
s+1
s(s + 2)(s + 3)
V F Il sistema `e seplicemente stabile (marginalmente stabile, o Marginally stable).
V F Il sistema `e asintoticamente stabile (Asymptotically stable).
V F Il sistema `e instabile ( Unstable).
Commento: Il sistema ha tre poli, due a parte reale negativa e un polo nell’origine, per cui il
sistema `e semplicemente stabile e la prima risposta `e la sola corretta.
3
Cognome e Nome
Matricola
4. Si consideri un sistema lineare e tempo invariante caratterizzato da un ingresso u(t) e un’uscita
y(t) e descritto dalla seguente equazione differenziale
d3 y(t)
d2 y(t) dy(t)
+
2
+
= u(t)
dt3
dt2
dt
si calcoli la funzione di trasferimento ipotizzando condizioni iniziali tutte nulle, e, in base alla
analisi dei poli, si indichi se:
V F Il sistema `e seplicemente stabile (marginalmente stabile, o Marginally stable).
V F Il sistema `e asintoticamente stabile (Asymptotically stable).
V F Il sistema `e instabile ( Unstable).
Commento: Applicando la trasformata di Laplace alla equazione sopra riportata, si ottiene:
(s(s2 + 2s + 1))Y (s) = U (s)
da cui si ricava la funzione di trasferimento:
G(s) =
1
s(s2 + 2s + 1)
la cui equazione caratteristica ha una soluzione singola in zero (corrispondente ad un polo semplice nell’origine, e quindi un modo limitato) e una radice doppia in −1, con parte reale negativa,
che corrisponde ad un modo convergente a zero, per cui il sistema `e semplicemente stabile.
5. Si consideri un sistema lineare e tempo invariante caratterizzato da un ingresso u(t) e un’uscita
y(t) e descritto dalla seguente equazione differenziale
d2 y(t)
dy(t)
+2
+ y(t) = u(t)
2
dt
dt
si calcoli la funzione di trasferimento ipotizzando condizioni iniziali tutte nulle, e quindi si scriva
nello spazio di seguito i modi del sistema:
m(t) = e−t + te−t
Commento: Applicando la trasformata di Laplace alla equazione sopra riportata, si ottiene:
(s2 + 2s + 1)Y (s) = U (s)
da cui si ricava la funzione di trasferimento:
G(s) =
1
(s2 + 2s + 1)
Tale funzione di trasferimento ha un polo doppio in −1, a cui corrisponde il modo
m(t) = e−t + te−t
che corrisponde quindi al modo el sistema.
4
Cognome e Nome
Matricola
6. Sia dato il sistema elementare del secondo ordine:
G(s) =
Kp
s(1 + τ s)
La risposta per t ≥ 0 all’ingresso impulso di Dirac del sistema G(s) (cio`e l’uscita ottenuta
applicado come ingresso la trasformata dell’impulso di Dirac vale:
t
V F Kp (1 − e+ τ )
t
V F Kp e+ τ
t
V F Kp (1 − e− τ )
Commento:
Data la funzione di trasferimento
Y (s) = G(s)U (s)
con ingresso ad impulso:
U (s) = 1
si ottiene applicando ad esempio il teorema dei fratti semplici:
Kp
= Kp
Y (s) =
s(1 + τ s)
1
−
s
1
τ
1
+s
!
da cui, antitrasformando, si ottine che la sola terza risposta `e quella corretta.
7. Dato un sistema dinamico del primo ordine:
G(s) =
1
s+3
a cui viene applicato un ingresso a gradino e definito il tempo di assestamento ta come il tempo
al quale l’uscita entra in modo stabile (senza cio`e pi`
u uscirne) in una fascia centrata attorno al
valor finale di ampizza ±5%, allora `e possibile scrivere:
V F ta ≈ 3
V F ta ≈ 1
V F ta ≈ 6
Commento: Il tempo di assestamento ts `e approssimativamente pari a tre volte la costante di
tempo del sistema, che nel caso in questione `e 1/3, per cui la risposta corretta `e la seconda.
5
Cognome e Nome
Matricola
8. Si consideri un sistema descritto dalla funzione di trasferimento
G(s) =
s2 (s2
1
+ 10)
Per tale sistema si costruisca la retroazione unitaria come in figura per cui possiamo andare
ad analizzare l’errore a regime quando `e applicato un ingresso p(t) a parabola con curvatura
A = 0.1:
p(t) = A · t2 se t ≥ 0, altrimenti: p(t) = 0 ,
R(s)
E(s)
+-
Y(s)
-
G(s)
-
- 6
allora valgono le seguenti considerazioni.
V F La costante di accelerazione (Acceleration Constant) del sistema G(s) `e pari a Ka = 10.
V F L’errore di accelerazione del sistema chiuso in retroazione `e pari a ea = 1.
V F L’errore di accelerazione del sistema chiuso in retroazione `e pari a ea = 0.
Commento: Il sistema `e di tipo 2, cio`e ha due poli nell’origine. Essendo definita la costante
di accelerazione come:
Ka = lim s2 G(s) = lim
s7→0 s2
s7→0
1
1
=
= 0.1
+ 10
10
si ottine che la prima risposta `e errata. Dalla analisi dell’errore di accelerazione si ricava poi che
ea =
A
=1
Ka
per cui la seconda risposta `e corretta.
La terza risposta, essendo in contrasto con la seconda, `e chiaramente errata.
9. Si consideri l’analisi dell’errore a regime per un sistema dinamico in retroazione unitaria.
R(s)
E(s)
+-
Y(s)
-
- 6
6
G(s)
-
Cognome e Nome
Matricola
allora valgono le seguenti considerazioni per un ingresso R(s) a gradino con ampiezza A.
V F L’errore di posizione `e infinito se il guadagno statico (Static Gain) Kp del sistema `e
infinito.
V F L’errore di posizione `e pari a ep =
A
Kp ,
essendo il guadagno statico (Static Gain) Kp .
V F L’errore di posizione `e nullo se il sistema `e di tipo 0, cio`e il sistema non ha nessun polo
nell’origine.
Commento:
Tutte e tre le risposte sono errate, come risulta dalla teoria sugli errori a regime
7
Cognome e Nome
Matricola
10. Si consideri il seguente anello di controllo:
R(s)
- C(s)
- 6
Y(s)
+-
-
G(s)
-
per cui definiamo la funzione L(s) = C(s)G(s), detto anche Guadagno di Anello. Il Margine
di Ampiezza di L(s) `e definito come:
V F Ma := −|L(jωf )|db , dove ωf : arg(L(jωf )) = −90o
V F Ma := −|L(jωf )|db , dove ωf : arg(L(jωf )) = −270o
V F Ma := 180o − |arg(L(jωc ))|, dove ωc : |L(jωc )|db = 0
Commento:
sono errate.
In base alle definizioni dei margini di fase ed ampiezza, tutte e tre le risposte
11. Si consideri un sistema descritto dalla funzione di trasferimento
G(s) =
1
(s + 1)
Chiuso in retroazione con il controllore C(s) come nello schema che segue:
R(s)
- C(s)
- 6
Y(s)
+-
-
G(s)
-
Per tale sistem chiuso in retroazione possiamo affermare:
V F Nel caso in cui C(s) = K, all’aumentare della costante proporzionale K il sistema pu`
o
divenire instabile.
V F Nel caso in cui C(s) = K, all’aumentare del guadagno proporzionale K (fino ad un
valore grande a piacere, ma minore di infinito) `e possibile annullare l’errore a regime con
ingresso a gradino,
V F Nel caso in cui C(s) = 1s , il sistema chiuso in retroazione ´e instabile.
Commento: Il sistema `e un sistema del primo ordine. Eseguento un studio del tipo luogo
delle radici `e immediato verificare che la prima risposta `e errata. Inoltre, analizzando l’errore
a regime del sistema, che `e di tipo 0, cio`e non ha alcun polo nell’origine, si conclude che anche
la seconda risposta `e errata. Eseguendo un calcolo dei poli del sistema chiuso in retroazione, si
conclude, infine, che anche la terza risposta ´e errata
8
Cognome e Nome
Matricola
12. Si consideri un sistema descritto dalla funzione di trasferimento
G(s) =
1000
(s + 1)
e si consideri il progetto di un sistema di controllo in retroazione per G(s).
R(s)
- C(s)
- 6
Y(s)
+-
-
G(s)
-
Allora si posso trarre le seguenti considerazioni per il progetto del controllore C(s) con ingressi
di riferimento R(s) a gradino e ingresso a rampa:
V F Per annullare l’errore a regime con ingresso a rampa `e sufficiente introdurre un solo
termine integrale (un solo polo nell’origine) nel sistema di controllo.
V F Per annullare l’errore a regime con ingresso a gradino occorre introdurre una azione
integrale nel sistema di controllo.
V F Per annullare l’errore a regime con ingresso a gradino occorre introdurre una azione
derivativa nel sistema di controllo.
Commento: Il sistema `e del primo ordine senza poli nell’origine, per cui `e necessario introdurre una azione di controllo integrale nel controllore per annullare l’errore di posizione, mentre
`e necessario inserire due termini integrativi per annullare l’errore di velocit`a. L’azione derivativa non ha effetto sull’andamento a regime, in quanto tale effetto si annulla quando i segnali
raggiungono un regime stazionario.
Quindi tutte le risposte sono sbagliate.
13. Si consideri un sistema descritto dalla funzione di trasferimento:
G(s) =
(s2
1
− 4s − 5)
con ingresso a gradino di ampiezza pari a 10. Utilizzando il Teorema del Valore Finale, si valuti
la correttezza delle risposte:
V F Il segnale di uscita y(t) per t 7→ ∞ `e pari a 0.
V F Il segnale di uscita y(t) per t 7→ ∞ `e pari a ∞.
V F Il Teorema non `e applicabile in quanto il sistema non `e stabile.
Commento: Si pu`
o notare che due coefficienti sono negativi del denominatore, per cui vi sono
necessariamente radici con parte reale positiva, per cui la sola terza risposta `e corretta.
9
Cognome e Nome
Matricola
14. Si consideri il seguente anello di controllo:
n(s)
R(s)
d(s)
?
- C(s)
+
- 6
+-
-.
G(s)
Y(s)
?
+
allora la funzione di Sensitivit`
a `e calcolata come:
V F S(s) =
C(s)G(s)
C(s)(1+C(s)G(s))
V F S(s) =
1
C(s)+C(s)G(s)
V F S(s) =
C(s)G(s)
1−C(s)G(s)
Commento: In base alle definizioni su funzioni di Sensitivit`
a, Sensitivit`
a complementare
e Sensitivit`
a del controllo, nessuna delle risposte `e corretta.
15. Si consideri un sistema lineare e tempo invariante caratterizzato da un ingresso u(t) e un’uscita
y(t) e descritto dalla funzione di trasferimento:
G(s) =
s
(s + 1)
si verifichi la veridicit`
a delle seguenti affermazioni (si approssimi a due decimali i calcoli):
p
V F Dato un segnale costante u(t) = A l’uscita `e un segnale costante y(t) = A/ (2).
V F Dato un segnale sinusoidale con pulsazione
p unitaria ω = 1: u(t) = A sin(t) l’uscita `e un
segnale sinusoidale con modulo |y(t)| = A/ (2).
V F Dato un segnale a rampa u(t) = A · t, l’uscita `e un segnale costante y(t) = A.
Commento:
La prima risposta `e errata in quanto presuppone che l’ingresso sia costante, per cui l’uscita `e
nulla, in quanto vi `e uno zero nell’origine che comporta una usicta nulla ad ingresso constante
(a causa della presenza di un derivatore sull’ingresso).
Per la seconda risposta, applicando il teorema della risposta armonica, si ottiene che per un
ingresso sinusoidale u(t) = A sin(ωt), l’uscita vale:
y(t) = |G(jω)| · A · sin(ωt + arg(G(jω)))
essendo G(jω) la funzione di risposta armonica che si ricava dalla funzione di trasferimento
applicando il teorema:
F (ω) = G(jω) = G(s)|s=jω
10
Cognome e Nome
Matricola
Facendo quindi i conti, si ottine che la prima risposta `e corretta, infatti:
jω |y(t)| = A jω + 1 e quindi sostituendo a ω = 1, otteniamo che la seconda risposta `e corretta.
La terza risposta afferma che l’ingresso `e a rampa, per cui la trasformata dell’uscita varr`a:
Y (s) =
A
s A
=
2
s+1s
s(s + 1)
Applicando il Teorema del Valore Finale, otteniamo:
limt7→∞ y(t) = lims7→0 sY (s) = lims7→0
per cui anche la terza risposta `e corretta.
11
A
=A
s+1
Cognome e Nome
Matricola
Si svolgano i seguenti esercizi indicando chiaramente i passaggi seguiti per raggiungere
la soluzione
Esercizio 1
Si consideri il seguente sistema in retroazione
R(s)
- C(s)
- 6
Y(s)
+-
-
G(s)
-
dove
G(s) =
s2 − 2s + 10
(s + 20)(s + 1)(s − 2)
Posto C(s) = k, si tracci il luogo delle radici del sistema chiuso in retroazione al variare di k da 0
a +∞.
IMPORTANTE: si elenchino e descrivino le regole applicate per il tracciamento del luogo delle
radici.
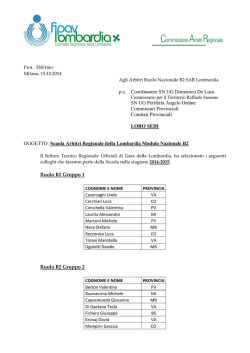
Commento: Applichiamo le regole di tracciamento:
1. Il luogo delle radici inizia sui poli e termina sugli zeri o all’infinito. Identifichiamo quindi i poli
e gli zeri del sistema.
Il sistema ha due zeri z1,2 = {1 + j3, 1 − j3} e tre poli p1 = −20, p2 = −1, p3 = 2
Il luogo delle radici avr`
a un solo asintoto verso l’infinito (eccedenza di poli rispetto agli zeri).
2. I punti dell’asse reale che lasciano alla propria destra un numero dispari di zeri o poli fanno
parte del luogo delle radici.
In base a questa regola, sono luogo delle radici i punti sull’asse reale compresi nel segmento
[−1, 2] e sulla semiretta ] − ∞, −20].
3. L’asintoto `e quindi coincidente con l’asse reale a partire dal punto p1 = −20 .
4. Il luogo delle radici `e simmetrico rispetto all’asse reale, per cui il luogo lascia l’asse reale con
due rami che convergono verso i due zeri. I rami sono quindi simmetrici rispetto all’asse reale.
Il luogo delle radici ´e quindi rappresentato nelle seguente figura
12
Cognome e Nome
Matricola
Esercizio 2
Si consideri ancora il seguente sistema in retroazione
R(s)
- C(s)
- 6
Y(s)
+-
-
G(s)
-
dove
G(s) =
1
(s + 20)(s + 1)(s − 2)
Si progetti un controllore C(s) che renda il sistema chiuso in retroazione asintoticamente stabile.
Commento:
Per rispondere alla prima domanda, `e possibile utilizzare lo studio del luogo delle radici.
Il sistema ha tre poli in p1 = −20, p2 = −1, p3 = 2 e nessuno zero, per cui, in base alle regole di
tracciamento, si ottine un luogo avente tre asintoti con centro stella in: (−20 − 1 + 2)/3 = −6.333.
13
Cognome e Nome
Matricola
Per ottenere un sistema asintoticamente stabile occorre progettare un controllore che, tramite una
anlisi fatta con il luogo delle radici, presenti tutti i poli a parte reale negativa.
Assumento che non `e prudente effettuare una cancellazione polo/zero a parte reale positiva, utilizziamo un controllore in cui lo zero cancelli il polo pi´
u lento a parte reale negativa, in modo che il
luogo delle radici venga traslato verso il semipiano reale negativo.
Una possibile scelta `e il controllore:
s+1
s + 100
il polo del controllore serve a spostare verso sinistra il luogo delle radici che, in base alle analisi
fatte andr`a ad essere:
C(s) = K
Se consideriamo la funzione di strasferimento in retroazione, otteniamo:
H(s) =
K
(s + 20)(s + 100)(s − 2) + K
14
Cognome e Nome
Matricola
E’ possibile calcolare il valore di K per cui si ha l’attraversamento del polo pi`
u a destra sul luogo
della radici, ponendo s = 0 nel denominatore della H(s), per cui otteniamo:
Kl = 4000
Per cui per K > Kl otteniamo un sistema asintoticamente stabile, purch`e i poli rimangano reali,
come si pu`o verificare dalla anlisi del luogo delle radici.
15
Cognome e Nome
Matricola
Esercizio 3
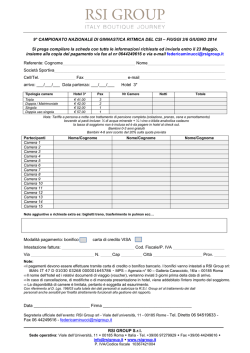
Si tracci il Diagramma di Bode di un sistema lineare descritto dalla funzione di trasferimento:
G(s) = 1000
1 + s + s2
(s + 1000)(1 + 1000s)
tracciando sul foglio allegato la sola approssimazione per semirette (spezzate).
Si richiede di tracciare i grafici dei termini in modo separato e poi, successivamente, riportare il
risultato finale in un unico grafico.
Si indichi poi nella seguente tabella (approsimando tutti i dati alla seconda cifra decimale):
ωn0
=
ωa0 , ωb0 =
ωn =
ωa , ωb =
la pulsazione di taglio (o di rottura) sul diag. delle ampiezze corrispondente al numeratore
1
le due pulsazioni sul diagramma delle fasi corrispondenti al termine a numeratore
{0.45, 2.19}
la pulsazione di taglio sul diagramma delle ampiezze corrispondente al denominatore
0.001, 1000
le due pulsazioni sul diagramma delle fasi corrispondente al denominatore
{0.000208, 0.004810}, {208, 4810}
Commento:
Il tracciamento dei diagrammi di Bode di ottiene tramite:
1. Riscrivere la Funzione di trasferimento nella forma con costanti di tempo:
G(s) = 1000
1 + s + s2
1 + s + s2
=
1000(0.001s + 1)(1 + 1000s)
(0.001s + 1)(1 + 1000s)
dove si calcolano gli zeri, poli, le costanti di tempo e i coefficienti di smorzamento e pulsazione
naturale del sistema, ottenendo quindi:
z1,2
ωn0
δ0
p1,2
τ 1, 2
K
= −0.5 + j0.866, = −0.5 − j0.866
=1
= 0.5
−0.001, = −1000
= 1000, 0.001,
=1
da cui:
1 − ω 2 + jω
F (ω) =
(τ1 s + 1)(τ2 s + 1)
16
Cognome e Nome
Matricola
2. Consideriamo quindi i tre termini elementari in cui si pu`o pensare scomponibile la funzione di
risposta armonica F (ω):
(a) 1 − ω 2 + jω , il cui diagramma di bode nelle ampiezze ha il punto di rottura in corrispondenza di ωn = 1, mentre il diagramma delle fasi ha i due punti ωa0 = ωn0 · (4.81)−δ = 0.45
ωb0 = ωn0 · (4.81)δ = 2.19
Dopo il punto di rottura, il diagramma continua con una variazione del diagramma delle
ampiezze complessivo di +40 db/decade.
(b) (jω1000 + 1), il cui diagramma di bode nelle ampiezze ha il punto di rottura in corrispondenza di ωn = |p1 | = 0.001 = 10−3 (in scala logaritmica), mentre il diagramma delle fasi
ha i due punti ωa = 0.001 · (4.81)−1 = 0.000208 e ωb = 0.001 · 4.81 = 0.004810. Dopo il
punto di rottura, il diagramma continua con una variazione del diagramma delle ampiezze
complessivo di −20 db/decade.
(c) (jω0.001 + 1), il cui diagramma di bode nelle ampiezze ha il punto di rottura in corrispondenza di ωn = |p2 | = 1000 = 103 (in scala logaritmica), mentre il diagramma delle fasi ha i
due punti ωa = 1000 · (4.81)−1 = 208 e ωb = 1000 · 4.81 = 4810. Dopo il punto di rottura, il
diagramma continua con una variazione del diagramma delle ampiezze complessivo di −20
db/decade.
Il Diagramma complessivo si ottine combinando i tre termini sopra analizzati.
17
© Copyright 2026 Paperzz