LXM32C
Servoamplificatore AC
Manuale del prodotto
0198441113763, V1.02, 12.2009
V1.02, 12.2009
www.schneider-electric.com
Avvertenze importanti
LXM32C
Avvertenze importanti
Il presente manuale è parte integrante del prodotto.
L'utilizzatore è tenuto a leggere il manuale e a osservarne le istruzioni.
Il manuale deve essere opportunamente conservato.
Il presente manuale e tutta la documentazione inerente il prodotto devono essere messi a disposizione degli utilizzatori.
Si raccomanda di leggere e di osservare in particolare tutte le istruzioni
relative alla sicurezza ed il capitolo "Prima della messa in funzione - Informazioni sulla sicurezza".
Il Costruttore si riserva il diritto di apportare modifiche tecniche senza
previa comunicazione.
Tutte le indicazioni fornite sono da intendersi come dati tecnici e non
come caratteristiche garantite.
Le denominazioni assegnate ai prodotti devono essere considerate di
norma come marchi di fabbrica del costruttore anche in assenza di
esplicito contrassegno.
2
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Non tutti i prodotti sono disponibili in ciascun Paese.
I prodotti disponibili sono riportati nella versione aggiornata del catalogo.
LXM32C
Sommario
Sommario
Avvertenze importanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Sommario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Informazioni sul manuale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Letteratura di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1 Introduzione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1
Panoramica dell'apparecchio . . . . . . . . . . . . . . . . . . . . 11
1.2
Componenti e interfacce . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3
Codice tipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Prima della messa in funzione - Informazioni sulla sicurezza 15
2.1
Qualifiche richieste per il personale . . . . . . . . . . . . . . . 15
2.2
Uso conforme allo scopo di destinazione . . . . . . . . . . . 15
2.3
Classi di pericolosità . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4
Informazioni fondamentali . . . . . . . . . . . . . . . . . . . . . . . 17
2.5
Misurazione della tensione sul bus DC . . . . . . . . . . . . . 19
2.6
Sicurezza funzionale . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.7
Normative e concetti tecnici . . . . . . . . . . . . . . . . . . . . . 20
0198441113763, V1.02, 12.2009
3 Dati tecnici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Servoamplificatore AC
3.1
Condizioni ambientali . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2
3.2.1
Dati meccanici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Disegni quotati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3
3.3.1
3.3.2
3.3.3
3.3.4
3.3.5
3.3.6
3.3.7
3.3.8
Dati elettrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Stadio finale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Alimentazione di controllo 24 V . . . . . . . . . . . . . . . .
Segnali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sicurezza funzionale. . . . . . . . . . . . . . . . . . . . . . . . .
Resistenza di frenatura. . . . . . . . . . . . . . . . . . . . . . .
Filtro di rete interno. . . . . . . . . . . . . . . . . . . . . . . . . .
Filtro di rete esterno (accessorio) . . . . . . . . . . . . . . .
Induttanza di rete (accessorio) . . . . . . . . . . . . . . . . .
25
25
32
33
41
42
45
46
47
3
Sommario
LXM32C
3.4
Condizioni per la UL 508C . . . . . . . . . . . . . . . . . . . . . . 48
3.5
Certificazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6
Dichiarazione di conformità . . . . . . . . . . . . . . . . . . . . . 49
3.7
Certificato TÜV di sicurezza funzionale . . . . . . . . . . . . 50
4 Fondamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.1
Sicurezza funzionale . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5 Progettazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.1
Compatibilità elettromagnetica, CEM . . . . . . . . . . . . . . 54
5.2
5.2.1
Cavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Panoramica generale dei cavi necessari . . . . . . . . . 59
5.3
Dispositivo di sicurezza per correnti disperse. . . . . . . . 61
5.4
Esercizio in rete IT . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.5
Collegamento in parallelo del bus DC . . . . . . . . . . . . . 62
5.6
Induttanza di rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.7
5.7.1
Filtri di rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Disattivazione dei condensatori Y. . . . . . . . . . . . . . 65
5.8
5.8.1
5.8.2
5.8.3
Dimensionamento della resistenza di frenatura . . . . . .
Resistenza di frenatura interna . . . . . . . . . . . . . . . .
Resistenza di frenatura esterna . . . . . . . . . . . . . . . .
Sussidio di dimensionamento . . . . . . . . . . . . . . . . .
66
67
68
69
5.9
5.9.1
5.9.2
5.9.3
5.9.4
Funzione di sicurezza STO ("Safe Torque Off") . . . . . .
Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Requisiti per l'uso della funzione di sicurezza . . . . .
Esempi di applicazione STO . . . . . . . . . . . . . . . . . .
73
73
73
74
76
5.10
Tipo di logica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.11
Funzioni di monitoraggio . . . . . . . . . . . . . . . . . . . . . . . 79
5.12
Ingressi e uscite configurabili . . . . . . . . . . . . . . . . . . . . 79
4
6.1
6.1.1
6.1.2
Installazione meccanica . . . . . . . . . . . . . . . . . . . . . . . . 82
Montaggio dell'apparecchio . . . . . . . . . . . . . . . . . . . 83
Montaggio di filtro di rete, induttanza di rete e
resistenza di frenatura . . . . . . . . . . . . . . . . . . . . . . . 85
6.2
6.2.1
6.2.2
6.2.3
6.2.4
6.2.5
6.2.6
6.2.7
Installazione elettrica . . . . . . . . . . . . . . . . . . . . . . . . . .
Panoramica generale delle modalità di esecuzione.
Panoramica dei collegamenti . . . . . . . . . . . . . . . . . .
Collegamento vite di messa a terra . . . . . . . . . . . . .
Connessione delle fasi motore (CN10, motore) . . . .
Connessione del freno d'arresto (CN11, Brake) . . .
Connessione bus DC (CN9, bus DC). . . . . . . . . . . .
Connessione resistenza di frenatura
(CN8, Braking Resistor) . . . . . . . . . . . . . . . . . . . . . .
87
88
89
90
91
97
99
99
Servoamplificatore AC
0198441113763, V1.02, 12.2009
6 Installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
LXM32C
Sommario
6.2.8
6.2.9
6.2.10
6.2.11
6.2.12
6.2.13
6.2.14
6.2.15
6.3
Connessione dell'alimentazione stadio finale (CN1) 102
Connessione encoder motore (CN3) . . . . . . . . . . . 106
Connessione PTO (Pulse Train Out, CN4) . . . . . . . 108
Connessione PTI (CN5, Pulse Train In) . . . . . . . . . 110
Connessione alimentazione di controllo e STO
(CN2, DC Supply e STO) . . . . . . . . . . . . . . . . . . . . 113
Collegamento degli ingressi analogici (CN6.1). . . . 116
Connessione di ingressi/uscite digitali (CN6) . . . . . 118
Connessione PC con software di messa in’
servizio (CN7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Controllo dell'installazione. . . . . . . . . . . . . . . . . . . . . . 122
7 Messa in servizio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.1
Informazioni fondamentali . . . . . . . . . . . . . . . . . . . . . . 123
7.2
7.2.1
7.2.2
Prospetto generale . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Singoli passaggi della messa in funzione . . . . . . . . 126
Strumenti per la messa in servizio . . . . . . . . . . . . . 127
7.3
7.3.1
7.3.2
7.3.3
HMI integrata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display e comando . . . . . . . . . . . . . . . . . . . . . . . . .
Struttura dei menu . . . . . . . . . . . . . . . . . . . . . . . . .
Esecuzione delle regolazioni . . . . . . . . . . . . . . . . .
7.4
Software di messa in servizio . . . . . . . . . . . . . . . . . . . 132
7.5
7.5.1
7.5.2
7.5.3
Fasi operative per la messa in servizio . . . . . . . . . . . .
Primo inserimento. . . . . . . . . . . . . . . . . . . . . . . . . .
Stato operativo (diagramma di stato) . . . . . . . . . . .
Impostazione dei parametri fondamentali e
dei valori limite . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi analogici . . . . . . . . . . . . . . . . . . . . . . . . . .
Ingressi/uscite digitali . . . . . . . . . . . . . . . . . . . . . . .
Controllo della funzione di sicurezza STO . . . . . . .
Freno d'arresto . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Controllo della direzione di movimento. . . . . . . . . .
Impostazione dei parametri per encoder . . . . . . . .
Impostazione dei parametri per la resistenza
di frenatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esecuzione dell'Autotuning. . . . . . . . . . . . . . . . . . .
Impostazioni avanzate per l'Autotuning . . . . . . . . .
7.5.4
7.5.5
7.5.6
7.5.7
7.5.8
7.5.9
7.5.10
7.5.11
7.5.12
0198441113763, V1.02, 12.2009
7.6
7.6.1
7.6.2
7.6.3
7.6.4
Servoamplificatore AC
128
129
130
131
133
133
134
135
139
141
143
144
147
148
152
154
157
7.6.5
Ottimizzazione del regolatore con risposta al gradino.
Struttura del regolatore . . . . . . . . . . . . . . . . . . . . . .
Ottimizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ottimizzazione del regolatore di velocità . . . . . . . .
Controllo ed ottimizzazione delle impostazioni
preliminari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ottimizzazione del regolatore di posizione . . . . . . .
159
159
160
161
7.7
7.7.1
Memory card . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Scambio di dati con la memory card . . . . . . . . . . . 174
7.8
Esecuzione di una copia delle impostazioni
dell'apparecchio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
168
169
5
Sommario
LXM32C
8 Funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
8.1
Canali di accesso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
8.2
8.2.1
8.2.2
8.2.3
8.2.4
Stati di funzionamento . . . . . . . . . . . . . . . . . . . . . . . .
Diagramma di stato . . . . . . . . . . . . . . . . . . . . . . . .
Cambiamenti di stato . . . . . . . . . . . . . . . . . . . . . . .
Segnalazione dello stato di funzionamento . . . . . .
Cambio dello stato di funzionamento. . . . . . . . . . .
181
181
184
185
186
8.3
8.3.1
8.3.2
8.3.3
8.3.4
8.3.5
Modi operativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Avvio e cambio di modo operativo . . . . . . . . . . . . .
Modo operativo Jog . . . . . . . . . . . . . . . . . . . . . . . .
Modo operativo Electronic Gear. . . . . . . . . . . . . . .
Modo operativo Profile Torque . . . . . . . . . . . . . . . .
Modo operativo Profile Velocity . . . . . . . . . . . . . . .
187
187
188
194
203
210
8.4
8.4.1
8.4.2
8.4.3
8.4.4
Impostazioni avanzate . . . . . . . . . . . . . . . . . . . . . . . .
Impostazione del senso di movimento. . . . . . . . . .
Impostazione dell'interfaccia PTO . . . . . . . . . . . . .
Impostazione della scalatura . . . . . . . . . . . . . . . . .
Impostazione delle uscite e degli ingressi
segnale digitali . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Impostazione dei parametro dell'anello di controllo
216
216
217
219
8.5
8.5.1
8.5.2
8.5.3
8.5.4
8.5.5
8.5.6
8.6
8.6.1
8.6.2
8.6.3
8.6.4
8.6.5
253
253
254
256
258
259
261
262
262
265
267
268
8.6.7
Funzioni per l'elaborazione del valore target . . . . . . .
Profilo di movimento per la velocità . . . . . . . . . . . .
Arresto del movimento con Halt. . . . . . . . . . . . . . .
Arresto del movimento con Quick Stop . . . . . . . . .
Inversione degli ingressi segnale analogici . . . . . .
Limitazione della corrente tramite ingresso
segnale digitale . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limitazione della velocità con un ingresso
segnale digitale . . . . . . . . . . . . . . . . . . . . . . . . . . .
Zero clamp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.7
8.7.1
8.7.2
8.7.3
8.7.4
8.7.5
8.7.6
Funzioni per il monitoraggio del movimento . . . . . . . .
Interruttori di finecorsa . . . . . . . . . . . . . . . . . . . . . .
Inattività del motore . . . . . . . . . . . . . . . . . . . . . . . .
Finestra errore di posizionamento . . . . . . . . . . . . .
Finestra errore di velocità. . . . . . . . . . . . . . . . . . . .
Valore soglia di velocità . . . . . . . . . . . . . . . . . . . . .
Valore soglia di corrente . . . . . . . . . . . . . . . . . . . .
271
271
273
274
276
278
280
8.6.6
6
Funzioni per il monitoraggio dei segnali interni
all'apparecchio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Monitoraggio della temperatura . . . . . . . . . . . . . . .
Monitoraggio del carico e del sovraccarico
(monitoraggio I2T) . . . . . . . . . . . . . . . . . . . . . . . . .
Monitoraggio dell'errore di posizionamento
dovuto al carico (errore d'inseguimento) . . . . . . . .
Monitoraggio della commutazione . . . . . . . . . . . . .
Monitoraggio delle fasi della rete . . . . . . . . . . . . . .
Monitoraggio dei guasti a terra . . . . . . . . . . . . . . .
223
236
269
269
270
Servoamplificatore AC
0198441113763, V1.02, 12.2009
8.4.5
LXM32C
Sommario
9 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
9.1
Indicazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
9.2
Esempi per il modo operativo Electronic Gear . . . . . . 284
9.3
Esempi per il modo operativo Profile Velocity . . . . . . . 285
10 Diagnosi e rimozione delle anomalie . . . . . . . . . . . . . . . . . . 287
10.1
10.1.1
10.1.2
10.1.3
Richiesta di stato/indicazione di stato . . . . . . . . . . . . .
Diagnosi tramite l'HMI integrata . . . . . . . . . . . . . . .
Diagnosi con il software di messa in servizio . . . . .
LED di stato del bus di campo . . . . . . . . . . . . . . . .
287
288
289
290
10.2
10.2.1
Memoria errori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
Lettura della memoria errori tramite il software
di messa in servizio . . . . . . . . . . . . . . . . . . . . . . . . 290
10.3
10.3.1
10.3.2
10.3.3
Menu speciali dell'HMI integrata . . . . . . . . . . . . . . . . .
Lettura e conferma delle avvertenze . . . . . . . . . . .
Lettura e conferma degli errori . . . . . . . . . . . . . . . .
Conferma della sostituzione del motore . . . . . . . . .
10.4
10.4.1
Risoluzione dei problemi . . . . . . . . . . . . . . . . . . . . . . . 294
Tabella delle avvertenze e degli errori . . . . . . . . . . 294
291
291
292
293
11 Parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
11.1
11.1.1
Descrizione dei parametri . . . . . . . . . . . . . . . . . . . . . . 311
Cifre decimali con bus di campo. . . . . . . . . . . . . . . 313
11.2
Lista dei parametri. . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
12 Accessori e parti di ricambio . . . . . . . . . . . . . . . . . . . . . . . . . 377
Strumenti per la messa in servizio . . . . . . . . . . . . . . . 377
12.2
Schede di memoria . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
12.3
Targhetta di applicazione. . . . . . . . . . . . . . . . . . . . . . . 377
12.4
Cavi adattatori per segnali encoder
LXM05/LXM15 su LXM32 . . . . . . . . . . . . . . . . . . . . . . 377
0198441113763, V1.02, 12.2009
12.1
Servoamplificatore AC
7
Sommario
LXM32C
12.5
Cavi per PTO e PTI . . . . . . . . . . . . . . . . . . . . . . . . . . 377
12.6
12.6.1
12.6.2
12.6.3
Cavi motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cavo motore 1,5 mm2 . . . . . . . . . . . . . . . . . . . . . .
Cavo motore 2,5 mm2 . . . . . . . . . . . . . . . . . . . . . .
Cavo motore 4 mm2. . . . . . . . . . . . . . . . . . . . . . . .
12.7
Cavo encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
12.8
Connettore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
12.9
Resistenze di frenatura esterne . . . . . . . . . . . . . . . . . 382
12.10
Accessori per bus DC. . . . . . . . . . . . . . . . . . . . . . . . . 383
12.11
Induttanze di rete . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
12.12
Filtri di rete esterni . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
12.13
Parti di ricambio connettori, ventilatori, piastre
di copertura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
378
378
379
380
13 Assistenza tecnica, manutenzione e smaltimento . . . . . . . . 385
13.1
Indirizzi di assistenza tecnica . . . . . . . . . . . . . . . . . . . 385
13.2
13.2.1
Manutenzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
Durata della funzione di sicurezza STO. . . . . . . . . 385
13.3
Sostituzione di apparecchi . . . . . . . . . . . . . . . . . . . . . 386
13.4
Sostituzione del motore . . . . . . . . . . . . . . . . . . . . . . . 387
13.5
Spedizione, magazzinaggio, smaltimento . . . . . . . . . 388
14 Glossario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389
14.1
14.1.1
14.1.2
14.1.3
14.1.4
14.1.5
14.1.6
14.1.7
14.1.8
14.1.9
Unità e tabelle di conversione. . . . . . . . . . . . . . . . . . .
Lunghezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rotazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Coppia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Momento d'inerzia . . . . . . . . . . . . . . . . . . . . . . . . .
Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sezione del conduttore . . . . . . . . . . . . . . . . . . . . .
389
389
389
389
389
390
390
390
390
390
14.2
Definizioni e abbreviazioni . . . . . . . . . . . . . . . . . . . . . 391
0198441113763, V1.02, 12.2009
15 Indice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
8
Servoamplificatore AC
LXM32C
Informazioni sul manuale
Informazioni sul manuale
Il presente manuale vale per tutti i LXM32Cprodotti standard. Nel capitolo 1 "Introduzione" è riportato il codice relativo al presente prodotto. In
base al codice assegnato al tipo è possibile stabilire se il prodotto in
questione è di tipo convenzionale oppure se si tratta di una variante realizzata specificamente per il cliente.
Per questo prodotto sono disponibili i seguenti manuali:
Reperibilità dei manuali
•
Manuale del prodotto, descrive i dati tecnici, le modalità di installazione e di messa in servizio, i modi operativi e le funzioni.
•
Manuale del motore, descrive le caratteristiche tecniche del
motore, incluse le corrette modalità di installazione e di messa in
servizio.
Le versioni aggiornate dei manuali possono essere scaricate da Internet
al seguente indirizzo:
http://www.schneider-electric.com
Fonte di reperimento EPLAN
macros
Per una più semplice progettazione è possibile scaricare da Internet file
macro e dati anagrafici relativi agli articoli collegandosi al seguente indirizzo:
http://www.schneider-electric.com
Correzioni e suggerimenti
Il nostro obiettivo è il costante miglioramento. Per questa ragione accogliamo con piacere suggerimenti e correzioni relativi al presente manuale.
Il nostro indirizzo e-mail:
[email protected].
Fasi di lavoro
Quando è necessario eseguire in successione più fasi di lavoro, queste
ultime sono presentate nel modo seguente:
쮿 Condizioni preliminari particolari per la fasi di lavoro successive
왘 Fase di lavoro 1
컅 Reazione specifica richiesta per questa fase di lavoro
왘 Fase di lavoro 2
Se per una fase di lavoro è indicata una reazione, quest'ultima permette
di verificare la corretta esecuzione della fase di lavoro interessata.
0198441113763, V1.02, 12.2009
Se non diversamente specificato, le singole operazioni devono essere
eseguite nella sequenza indicata.
Semplificazione del lavoro
Le informazioni intese a semplificare il lavoro sono accompagnate da
questo simbolo:
In questa sede vengono fornite informazioni supplementari
volte a semplificare il lavoro.
Servoamplificatore AC
9
Informazioni sul manuale
LXM32C
Rappresentazione dei parametri
Nel testo i parametri sono rappresentati con il nome del parametro, ad
esempio _IO_act. La rappresentazione tabellare è illustrata al capitolo
Parametri. La lista parametri segue l'ordine alfabetico dei nomi dei parametri.
Unità SI
Le unità SI rappresentano valori originali. I valori ottenuti mediante conversione sono riportati in parentesi dopo il valore originale e possono risultare essere arrotondati.
Esempio:
Sezione minima del conduttore: 1,5 mm2 (AWG 14)
Segnali invertiti
I segnali invertiti sono contrassegnati da un trattino posto sopra il nome,
ad esempio STO_A o STO_B.
Tipi di logica
Il prodotto supporta il tipo di logica 1 e il tipo di logica 2 per segnali digitali. Tenere presente che gli esempi di cablaggio rappresentano prevalentemente il tipo di logica 1. Il cablaggio della funzione di sicurezza
STO deve essere eseguito sempre con tipo di logica 1.
Glossario
Indice analitico
Spiegazione di termini tecnici e delle abbreviazioni.
Elenco di concetti che permette di rimandare allo specifico contenuto
dei lemmi.
Letteratura di riferimento
Per eventuali approfondimenti consigliamo la seguente letteratura:
Ellis, George: Control System Design Guide. Academic Press
•
Kuo, Benjamin; Golnaraghi, Farid: Automatic Control Systems. John
Wiley & Sons
0198441113763, V1.02, 12.2009
•
10
Servoamplificatore AC
LXM32C
1 Introduzione
1
Introduzione
1.1
Panoramica dell'apparecchio
1
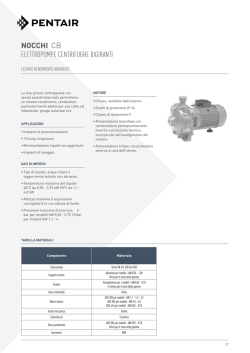
Con tre tipi di servoazionamenti, la famiglia di prodotti Lexium 32 copre
diversi campi d'impiego. In combinazione con i servomotori Lexium della
serie BMH o BSH e con una vasta gamma di optional e accessori, è possibile realizzare soluzioni compatte e di elevata performance per le più
svariate applicazioni.
Servoazionamento Lexium
LXM32C
Questo manuale del prodotto descrive il servoazionamento LXM32C.
0198441113763, V1.02, 12.2009
Panoramica generale di alcune delle caratteristiche del servoazionamento LXM32C:
Servoamplificatore AC
•
Due ingressi analogici (+/-10V, impulso/direzione) per il valore di
consegna
•
La messa in servizio avviene con l'interfaccia HMI integrata oppure
con un PC su cui è installato il software di messa in servizio.
•
Modi operativi Jog, Electronic Gear, Velocity Control e Torque Control.
•
Un innesto per memory card permette di copiare facilmente i parametri e di sostituire rapidamente l'apparecchio.
•
La funzione di sicurezza "Safe Torque Off" (STO) secondo IEC
61800-5-2 è presente di serie.
11
1 Introduzione
1.2
LXM32C
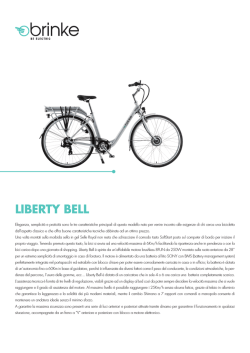
Componenti e interfacce
CN1
CN3
CN4
CN5
CN2
CN6
CN7
CN8
CN9
CN10
CN11
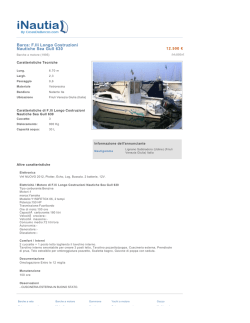
Panoramica generale degli attacchi di segnalazione
(CN1)
(CN2)
Allacciamento rete (alimentazione stadio finale)
Connessione per
(CN3)
(CN4)
• Alimentazione di controllo24V
• Funzione di sicurezza STO
Connessione per encoder motore (encoder 1)
Connessione per PTO (Pulse Train Out)
(CN5)
• ESIM (simulazione encoder)
Connessione per PTI (Pulse Train In)
(CN6)
• Impulso/Direzione
- oppure • Segnali encoder AB
- oppure • Impulso CW/CCW
Ingressi e uscite
• 2 ingressi analogici valore di consegna ±10V
• 6 ingressi digitali configurabili
• 5 uscite digitali configurabili
(CN7)
Modbus (interfaccia di messa in servizio)
(CN8)
Connessione per resistenza di frenatura esterna
(CN9)
Connessione per collegamento bus DC
(CN10) Connessione delle fasi motore
(CN 11) Connessione per freno d'arresto del motore
12
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Illustrazione 1.1
LXM32C
1.3
1 Introduzione
Codice tipo
LXM
32
C
D18
M2
(••••)
Denominazione prodotto
LXM - Lexium
Tipo di prodotto
32 - Servoazionamento per servomotori per un asse
Interfacce
C - Compact Drive con ingressi analogici e PulseTrain
A - Advanced Drive con bus di campo CANopen
M - Modular Drive
Corrente di picco (valore di cresta Î) [Arms]
U45 - 4,5Arms
U60 - 6Arms
U90 - 9Arms
D12 - 12Arms
D18 - 18Arms
D30 - 30Arms
D72 - 72Arms
Alimentazione stadio finale [Vac]
M2 - 1~, 115/200/240Vac
N4 - 3~, 400/480Vac
Altre opzioni
In caso di domande sul codice tipo, rivolgersi al rappresentante Schneider Electric locale. Per domande sulle varianti individuali, contattare il
produttore della macchina.
Variante individuale: In caso di versioni realizzate specificamente per i
clienti, in corrispondenza del punto 12 del codice tipo è riportata la lettera "S". Il numero successivo identifica la relativa variante individuale.
Esempio: LXM32••••S123
0198441113763, V1.02, 12.2009
La denominazione dell'apparecchio è riportata sulla targhetta.
Servoamplificatore AC
13
LXM32C
0198441113763, V1.02, 12.2009
1 Introduzione
14
Servoamplificatore AC
LXM32C
2 Prima della messa in funzione - Informazioni sulla sicurezza
2
Prima della messa in funzione - Informazioni
sulla sicurezza
2.1
Qualifiche richieste per il personale
2
Per effettuare interventi su questo prodotto e per il suo utilizzo deve essere impiegato esclusivamente personale specializzato che abbia letto
il presente manuale e tutta la documentazione inerente il prodotto e ne
abbia compreso il contenuto. Il personale specializzato, inoltre, deve
aver ricevuto un addestramento sulla sicurezza adeguato a riconoscere
ed evitare gli eventuali rischi. La formazione tecnica, le conoscenze acquisite e l'esperienza del personale specializzato devono essere tali da
poter prevedere e riconoscere i pericoli che possono derivare dall'impiego del prodotto, dalla modifica delle impostazioni e dal funzionamento degli equipaggiamenti meccanici, elettrici ed elettronici
dell'impianto nel suo complesso.
Gli specialisti devono essere a conoscenza di tutte le regolamentazioni
vigenti, nonché delle disposizioni e delle norme antinfortunistiche che
devono essere osservate in caso di esecuzione di interventi sul prodotto.
2.2
Uso conforme allo scopo di destinazione
Il presente prodotto è un azionamento per servomotori trifase che, conformemente alla presente istruzione, è destinato ad essere utilizzato nel
settore industriale.
Le norme di sicurezza vigenti, le condizioni di esercizio specificate ed i
dati tecnici indicati devono essere sempre rispettati.
Prima di utilizzare il prodotto occorre effettuare una valutazione dei rischi per quanto attiene le concrete condizioni di impiego. In base
all'esito del controllo occorre attuare le misure di sicurezza che si rendono necessarie.
Poiché il prodotto viene utilizzato all'interno di un sistema più complesso, la sicurezza delle persone addette all'esercizio deve essere assicurata dai sistemi di sicurezza integrati in tale sistema (ad esempio nel
macchinario).
0198441113763, V1.02, 12.2009
Per il funzionamento occorre utilizzare esclusivamente il cablaggio e gli
accessori specificati. Utilizzare soltanto accessori e parti di ricambio originali.
Il prodotto non deve essere utilizzato in ambienti soggetti a rischio di
esplosione (Ex).
Altri tipi di utilizzo sono da ritenersi non conformi alle finalità d'uso e possono costituire fonte di pericolo.
Gli apparecchi ed i dispositivi elettrici devono essere installati, utilizzati,
sottoposti a manutenzione e riparazione esclusivamente dal personale
specializzato.
Servoamplificatore AC
15
2 Prima della messa in funzione - Informazioni sulla sicurezza
2.3
LXM32C
Classi di pericolosità
All'interno del manuale le istruzioni relative alla sicurezza sono contrassegnate con simboli di avvertimento particolari. In esso sono inoltre riprodotti simboli e avvertenze sul prodotto miranti a segnalare eventuali
pericoli.
A seconda del grado di pericolo, le situazioni di rischio sono state suddivise il 4 classi di pericolosità.
@ PERICOLO
La dicitura PERICOLO segnala una situazione che rappresenta un
pericolo immediato e che in caso di mancata osservanza produce
inevitabilmente incidenti gravi o mortali.
@ AVVERTENZA
La dicitura AVVERTENZA indica segnala una situazione di possibile
rischio che in caso di mancata osservanza può in alcuni casi causare incidenti gravi o mortali o il danneggiamento degli apparecchi.
@ ATTENZIONE
La dicitura ATTENZIONE segnala una situazione di possibile rischio
che in caso di mancata osservanza può in alcuni casi causare incidenti o un danneggiamento degli apparecchi.
ATTENZIONE
0198441113763, V1.02, 12.2009
La dicitura ATTENZIONE non accompagnata dal simbolo di avvertimento segnala una situazione di possibile pericolo che in caso di
mancata osservanza può in alcuni casi causare un danneggiamento
degli apparecchi.
16
Servoamplificatore AC
LXM32C
2.4
2 Prima della messa in funzione - Informazioni sulla sicurezza
Informazioni fondamentali
@ PERICOLO
PERICOLO DI SCOSSE ELETTRICHE, DI ESPLOSIONI GENERICHE E
DOVUTE ALL'INNESCO DELL'ARCO VOLTAICO
•
Gli interventi su questo prodotto devono essere eseguiti esclusivamente da personale specializzato che abbia letto il presente
manuale e tutta la documentazione relativa al prodotto e ne abbia
compreso il contenuto. L'installazione, la preparazione, la riparazione e la manutenzione devono essere eseguiti esclusivamente
dal personale specializzato.
•
Il costruttore dell'impianto deve rispettare tutte le norme vigenti
riguardanti la messa a terra del sistema di azionamento.
•
Molti componenti del prodotto, ivi compreso il circuito stampato,
sono collegati alla tensione di rete. Non toccare. Utilizzare esclusivamente attrezzi provvisti di isolamento elettrico.
•
Non toccare i componenti non protetti o i morsetti sotto tensione.
•
Il motore genera tensione quando l'albero viene ruotato. Proteggere l'albero motore da azionamenti esterni prima di effettuare
operazioni sul sistema di azionamento.
•
La tensione alternata può trasferirsi su eventuali conduttori inutilizzati del cavo motore. Pertanto, isolare i conduttori inutilizzati su
entrambe le estremità del cavo motore.
•
Il bus DC ed i relativi condensatori non devono essere messi in
cortocircuito.
•
Prima di eseguire delle operazioni sul sistema di azionamento:
– Scollegare tutte le connessioni dall'alimentazione di tensione,
comprese eventuali tensioni di comando esterne.
– Contrassegnare tutti i commutatori con la dicitura "NON INSERIRE".
– Assicurare tutti i commutatori al fine di impedirne il reinserimento.
– Attendere 15 minuti (per consentire ai condensatori del bus
DC di scaricarsi). Misurare la tensione del bus DC come specificato nel capitolo "Misurazione della tensione del bus DC" e
accertarsi che sia < 42 Vdc. Il LED del bus DC non costituisce
un'indicazione affidabile dell'assenza di tensione sul bus DC..
•
Installare e chiudere tutte le coperture prima di applicare la tensione.
0198441113763, V1.02, 12.2009
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
Servoamplificatore AC
17
2 Prima della messa in funzione - Informazioni sulla sicurezza
LXM32C
@ AVVERTENZA
MOVIMENTO INASPETTATO
Gli azionamenti possono eseguire movimenti inaspettati a causa di
errori di cablaggio o di impostazione, dati errati o errori di altro genere.
Eventuali interferenze (CEM) possono provocare reazioni impreviste
dell'impianto.
•
Realizzare il cablaggio rispettando scrupolosamente le misure
precauzionali in materia di compatibilità elettromagnetica.
•
Prima di inserire e configurare il prodotto disinserire la tensione
sugli ingressi STO_A e STO_B per evitare l'avvio inatteso del
motore.
•
NON attivare il prodotto senza conoscerne le impostazioni o i
dati.
•
Eseguire un controllo scrupoloso prima di mettere in funzione il
sistema.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
@ AVVERTENZA
PERDITA DI CONTROLLO
•
Nella fase di progettazione del sistema di comando il costruttore
dell'impianto deve tenere conto dei potenziali rischi di guasto del
circuito di comando e per determinate funzioni deve predisporre
gli strumenti con cui durante e dopo il guasto di un circuito di
comando sia possibile ripristinare le condizioni di sicurezza. Funzioni di comando critiche sono costituite ad esempio da: ARRESTO DI EMERGENZA, limitazione della posizione di fine corsa,
interruzione dell'alimentazione di tensione e riavvio.
•
Per le funzioni critiche devono essere predisposti circuiti di
comando separati o ridondanti.
•
Il comando dell'impianto può comprendere anche i sistemi di
comunicazione. Il costruttore dell'impianto deve tenere conto
delle conseguenze derivanti da ritardi o anomalie inattese nel
sistema di comunicazione.
•
Rispettare le norme antinfortunistiche nonché tutte le disposizioni
vigenti in materia di sicurezza. 1)
•
Tutti gli impianti in cui deve essere utilizzato il prodotto descritto
nel presente manuale prima dell'esercizio devono essere controllati singolarmente e sottoposti ad un'attenta verifica funzionale.
1) Per gli USA: vedi NEMA ICS 1.1 (edizione più recente), Safety Guidelines for the
Application, Installation, and Maintenance of Solid State Control nonché NEMA
ICS 7.1 (edizione più recente), Safety Standards for Construction and Guide for
Selection, Installation for Construction and Operation of Adjustable-Speed Drive
Systems.
18
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
LXM32C
2.5
2 Prima della messa in funzione - Informazioni sulla sicurezza
Misurazione della tensione sul bus DC
Prima di eseguire interventi sul prodotto occorre interrompere l'alimentazione su tutte le connessioni.
@ PERICOLO
PERICOLO DI SCOSSE ELETTRICHE, DI ESPLOSIONI GENERICHE E
DOVUTE ALL'INNESCO DELL'ARCO VOLTAICO
•
La misurazione deve essere eseguita soltanto dal personale specializzato che abbia letto le istruzioni relative alla sicurezza contenute nel capitolo "Prima di iniziare - Informazioni relative alla
sicurezza" e ne abbia compreso il contenuto.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
La tensione sul bus DC può superare gli 800 Vdc. Per la misurazione utilizzare un apparecchio adatto. Procedura:
왘 Interrompere l'alimentazione di tensione su tutte le connessioni.
왘 Attendere 15 minuti (scarico dei condensatori bus DC).
왘 Misurare la tensione sul bus DC tra i morsetti del bus DC e control-
lare che il valore risulti < 42 Vdc.
왘 Se i condensatori del bus DC non si scaricano regolarmente rivol-
gersi all'ufficio commerciale locale Schneider Electric. Non effettuare la riparazione del prodotto in proprio e non mettere in
funzionamento il prodotto.
Il LED del bus DC non costituisce un'indicazione affidabile dell'assenza
di tensione nel circuito intermedio.
2.6
Sicurezza funzionale
0198441113763, V1.02, 12.2009
L'uso delle funzioni di sicurezza contenute in questo prodotto presuppone un'accurata pianificazione. Per maggiori informazioni consultare il
capitolo 5.9 "Funzione di sicurezza STO ("Safe Torque Off")" a pagina
73
Servoamplificatore AC
19
2 Prima della messa in funzione - Informazioni sulla sicurezza
2.7
LXM32C
Normative e concetti tecnici
I termini specifici, la terminologia e le relative descrizioni utilizzati nel
presente manuale devono essere conformi ai termini e alle definizioni
contenute nelle norme corrispondenti.
Nel settore dei sistemi di azionamento, si tratta tra l'altro dei termini "funzione di sicurezza", "stato sicuro", "fault", "fault reset", "guasto", "errore",
"messaggio d'errore", "avvertenza", "messaggio di avvertenza" ecc.
Tra le norme applicabili rientrano tra le altre:
•
Serie IEC 61800: "Azionamenti elettrici a velocità variabile"
•
Serie IEC 61158: "Comunicazione digitale dei dati nella tecnica di
controllo dei processi - Bus di campo per i sistemi di controllo industriali"
•
Serie IEC 61784: "Reti di comunicazione industriali - Profili"
•
Serie IEC 61508: "Sicurezza funzionale dei sistemi di controllo elettrici/elettronici/programmabili per applicazioni di sicurezza"
0198441113763, V1.02, 12.2009
Vedere a tal fine anche il glossario al termine del presente manuale.
20
Servoamplificatore AC
LXM32C
3
3 Dati tecnici
Dati tecnici
3
Questo capitolo fornisce informazioni sulle condizioni ambientali e sulle
caratteristiche elettriche e meccaniche della famiglia di prodotti e dei relativi accessori.
3.1
Condizioni ambientali
Condizioni ambientali per il
trasporto e lo stoccaggio
Il trasporto e il magazzinaggio devono avvenire in ambienti asciutti ed
esenti da polvere. La sollecitazione massima da vibrazioni e urti deve
rientrare entro i limiti prescritti.
Temperatura
[°C]
-25 ... 70
Durante il trasporto e lo stoccaggio i valori ammessi relativi all'umidità
relativa sono i seguenti:
Umidità atmosferica relativa
(senza condensa)
Condizioni ambientali durante il
funzionamento
[%]
95
La temperatura ambiente massima ammessa durante il funzionamento
dipende dalla distanza di montaggio degli apparecchi e dalla potenza richiesta. Osservare rigorosamente quanto prescritto nel capitolo Installazione.
Temperatura ambiente (assenza di [°C]
condensa e di ghiaccio)
0 ... 50
In esercizio sono ammessi i seguenti valori di umidità atmosferica relativa:
[%]
5 ... 95
0198441113763, V1.02, 12.2009
Umidità atmosferica relativa
(senza condensa)
Servoamplificatore AC
21
3 Dati tecnici
LXM32C
L'altitudine di installazione è riferita all'altezza sul livello del mare.
Altitudine d'installazione senza
riduzione della potenza
[m]
Altitudine di installazione in caso di [m]
rispetto di tutte le condizioni
seguenti:
•
Temperatura ambiente max.
45 °C
•
Riduzione della potenza continua dell'1% ogni 100 m a partire da 1000 m
Altitudine di installazione s.l.m. in
caso di rispetto di tutte le condizioni seguenti:
Posizione di montaggio e
connessione
Grado d'inquinamento e grado di
protezione
Grado di protezione per l'uso della
funzione di sicurezza
Temperatura ambiente max.
40 °C
•
Riduzione della potenza continua dell'1% ogni 100 m a partire da 1000 m
•
Sovratensioni della rete di alimentazione limitate alla categoria di sovratensione II in
conformità con la norma
IEC 60664-1
1000 ... 2000
2000 ... 3000
Durante il funzionamento l'apparecchio deve essere montato in un armadio elettrico chiuso. L'apparecchio può funzionare solo con una connessione fissa.
Grado d'inquinamento
2
Grado di protezione
IP 20
Accertarsi che all'interno del prodotto non si possano depositare tipologie d'imbrattamento conduttive (grado d'inquinamento 2). L'imbrattamento conduttivo può rendere inefficaci le funzioni di sicurezza.
Vibrazioni, sinusoidali
controllo eseguito secondo IEC
60068-2-6
3,5 mm (da 2 Hz a 8,4 Hz)
10 m/s2 (da 8,4 Hz a 200 Hz)
Urti, semisinusoidali
controllo eseguito secondo IEC
60068-2-27
150 m/s2 (per 11 ms)
0198441113763, V1.02, 12.2009
Vibrazioni e urti
•
[m]
<1000
22
Servoamplificatore AC
LXM32C
3.2
Dati meccanici
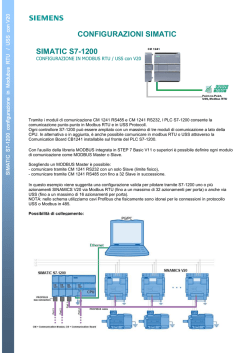
3.2.1
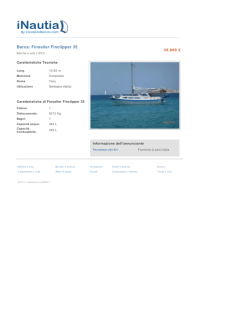
Disegni quotati
3 Dati tecnici
e
Z
h
F
H
c
f
Ø5.5
Ø10
T
X
Y
X
Z
Illustrazione 3.1
T
a
B
c
Ø5.5
Disegno quotato
e E
F
H
h
f
Ø5.5
2x
Ø10
B
0198441113763, V1.02, 12.2009
Illustrazione 3.2
Servoamplificatore AC
Y
a
2x Ø5.5
Disegno quotato
D12••
D18••
D30M2
D30N4
D72••
LXM32•...
U45••
U60••
U90••
Figura
Illustra- Illustra- Illustra- Illustrazione 3.1 zione 3.1 zione 3.2 zione 3.2
B
[mm] 48 ±1
48 ±1
68 ±1
108 ±1
T
[mm] 225
225
225
225
H
[mm] 270
270
270
274
23
3 Dati tecnici
LXM32C
LXM32•...
U45••
U60••
U90••
D12••
D18••
D30M2
D30N4
D72••
e
[mm] 24
24
13
13
E
[mm] -
-
42
82
F
[mm] 258
258
258
258
f
[mm] 7,5
7,5
7,5
7,5
a
[mm] 20
20
20
24
h
[mm] 230
230
230
230
c
[mm] 20
20
20
20
X Spazio utile richiesto
[mm] 60
60
60
60
Y Spazio utile richiesto
[mm] 100
100
100
100
Z Spazio utile richiesto
[mm] 100
100
100
100
Ventilatore
40 mm
Ventilatore
60 mm
Ventilatore
80 mm
Tipo di raffreddamento
Convezione 1)
1) >1 m/s
I cavi di connessione dell'apparecchio vengono condotti verso l'alto e
verso il basso. Per assicurare un'adeguata circolazione d'aria e consentire una posa dei cavi priva di piegature occorre attenersi alle seguenti
distanze:
Massa
•
Al di sopra dell'apparecchio deve essere mantenuto libero uno spazio di almeno 100 mm.
•
Al di sotto dell'apparecchio deve essere mantenuto libero uno spazio di almeno 100 mm.
•
Sul lato anteriore dell'apparecchio deve essere mantenuto libero
uno spazio di almeno 60 mm. Assicurarsi che gli elementi di
comando siano accessibili.
LXM32•...
kg
U60••
U90••
D12•• D18N4 D30N4 D72N4
D18M2 D30M2
1,6
1,7
1,8
2,0
2,6
4,7
0198441113763, V1.02, 12.2009
Massa
U45••
24
Servoamplificatore AC
LXM32C
3.3
3 Dati tecnici
Dati elettrici
I prodotti dono realizzati specificamente per il comparto industriale e
possono funzionare solo con connessione fissa.
3.3.1
Stadio finale
Tensione di rete: fascia e tolleranza
115/230 Vac monofase
[Vac]
100 -15% ... 120 +10%
115/230 Vac monofase
[Vac]
200 -15% ... 240 +10%
400/480 Vac trifase
[Vac]
380 -15% ... 480 +10%
Frequenza
[Hz]
50 -5% ... 60 +5%
Categoria di sovratensione III 1)
Sovratensioni transienti
Tensione di taratura a terra
[Vac]
300
1) In funzione dell'altitudine di installazione, vedere pagina 21
Tipo di rete (tipo di collegamento a
terra)
Rete TT, rete TN
ammessa
Rete IT
non ammessa
rete con conduttore di fase collegato a non ammessa
terra
Corrente transitoria di inserzione e
corrente di dispersione
Corrente transitoria di inserzione
[A]
<60
Corrente di dispersione (secondo
IEC 60990, figura 3)
[mA]
<30 1)
0198441113763, V1.02, 12.2009
1) Misurata su reti con centro neutro collegato a massa, senza filtro di rete esterno.
Per l'impiego di interruttori automatici FI occorre tenere presente che un interruttore da 30mA può scattare già a 15mA. Inoltre la misurazione non tiene conto del
flusso di corrente dispersa ad alta frequenza, di fronte alla quale gli interruttori
automatici FI hanno reazioni diverse.
Corrente assorbita e impedenza
dell'alimentazione dalla rete
La corrente assorbita dipende dall'impedenza della rete di alimentazione. Ciò si traduce nella possibile presenza di una corrente di cortocircuito. Se la rete di alimentazione presenta un'elevata corrente di
cortocircuito, inserire a monte l'induttanza di rete. Le induttanze di rete
adatte sono riportate nel capitolo 12 "Accessori e parti di ricambio".
Monitoraggio della corrente
permanente in uscita
La corrente permanente in uscita viene monitorata dall'apparecchio. In
caso di superamento continuo della corrente permanente in uscita, l'apparecchio riduce la corrente in uscita. Il flusso della corrente permanente in uscita viene mantenuto se la temperatura ambiente è inferiore
a 50 °C e se la resistenza di frenatura non genera calore.
Monitoraggio della potenza
permanente in uscita
La potenza permanente in uscita viene monitorata dall'apparecchio. In
caso di superamento della potenza permanente in uscita, l'apparecchio
riduce la corrente permanente.
Corrente di punta in uscita per
1 secondo
L'apparecchio è in grado di erogare una corrente di punta in uscita per
un arco di tempo di 1 secondo. Se in caso di inattività del motore si riscontra una corrente di punta in uscita, a causa del maggior carico di un
singolo interruttore semiconduttore la limitazione di corrente si attiva
prima rispetto al caso in cui il motore sia in movimento.
Servoamplificatore AC
25
3 Dati tecnici
LXM32C
Motori ammessi
Dati per apparecchi monofase a 115 Vac
LXM32•...
U45M2•...
U90M2•...
D18M2•...
D30M2•...
115 (1 ∼)
115 (1 ∼)
115 (1 ∼)
115 (1 ∼)
Tensione nominale
[V]
Corrente permanente in uscita
[Arms] 1,5
3
6
10
Corrente di punta in uscita (per 1 s)
[Arms] 3
6
10
15
Limitazione corrente transitoria di inserzione
[A]
1,7
3,5
8
16
Corrente assorbita alla potenza nominale [Arms] 2,9
e tensione nominale senza induttanza di
rete 1)
5,4
8,5
12,9
Potenza nominale senza induttanza di
rete
[kW]
0,15
0,3
0,5
0,8
Corrente di cortocircuito massima
ammessa della rete
[kA]
1
1
1
1
173
159
147
135
THD (total harmonic distortion) della cor- [%]
rente d'ingresso senza induttanza di rete
Potenza dissipata senza induttanza di
rete 2)
[W]
7
15
28
33
Corrente transitoria di inserzione massima senza induttanza di rete 3)
[A]
111
161
203
231
Tempo per la corrente transitoria di inser- [ms]
zione senza induttanza di rete
0,8
1,0
1,2
1,4
Induttanza di rete
5
2
2
2
Corrente assorbita alla potenza nominale [Arms] 2,6
e tensione nominale con induttanza di
rete 1)
5,2
9,9
9,9
Potenza nominale con induttanza di rete
0,2
0,4
0,8
0,8
THD (total harmonic distortion) della cor- [%]
rente d'ingresso con induttanza di rete
85
90
74
72
Potenza dissipata con induttanza di rete 2) [W]
8
16
32
33
Corrente transitoria d'inserzione massima [A]
con induttanza di rete 3)
22
48
56
61
Tempo per la corrente transitoria di inser- [ms]
zione con induttanza di rete
3,3
3,1
3,5
3,7
Fusibile ausiliario massimo 4)
25
25
25
25
[mH]
[kW]
[A]
1) In caso di prelievo della potenza nominale
2) Condizione: resistenza di frenatura interna non attiva; valore con corrente nominale, tensione nominale e potenza nominale;
valore pressoché proporzionale alla corrente
3) In caso estremo, impulso di disinserimento/inserimento prima dell'attivazione della limitazione corrente transitoria di inserzione,
tempo max. vedi righe seguenti
4) Fusibili: valvole fusibili di classe CC o J conformi a UL 248-4, in alternativa interruttori automatici con caratteristica B o C.
Possono essere utilizzati valori inferiori. Il fusibile deve essere scelto in modo che non si attivi con la corrente assorbita indicata.
26
Servoamplificatore AC
0198441113763, V1.02, 12.2009
3.3.1.1
A questa famiglia d'apparecchi possono essere connesse le seguenti
serie di motori omologati: BMH, BSH.
Nello scegliere il motore tenere presente anche il tipo e l'entità della tensione di rete. Altri motori disponibili su domanda.
LXM32C
3.3.1.2
3 Dati tecnici
Dati per apparecchi monofase a 230 Vac
LXM32•...
U45M2•...
U90M2•...
D18M2•...
D30M2•...
230 (1 ∼)
230 (1 ∼)
230 (1 ∼)
230 (1 ∼)
Tensione nominale
[V]
Corrente permanente in uscita
[Arms] 1,5
3
6
10
Corrente di punta in uscita (per 1 s)
[Arms] 4,5
9
18
30
Limitazione corrente transitoria di inserzione
[A]
3,5
6,9
16
33
Corrente assorbita alla potenza nominale [Arms] 2,9
e tensione nominale senza induttanza di
rete 1)
4,5
8,4
12,7
Potenza nominale senza induttanza di
rete
[kW]
0,3
0,5
1,0
1,6
Corrente di cortocircuito massima
ammessa della rete
[kA]
1
1
1
1
181
166
148
135
THD (total harmonic distortion) della cor- [%]
rente d'ingresso senza induttanza di rete
Potenza dissipata senza induttanza di
rete 2)
[W]
10
18
34
38
Corrente transitoria di inserzione massima senza induttanza di rete 3)
[A]
142
197
240
270
Tempo per la corrente transitoria di inser- [ms]
zione senza induttanza di rete
1,1
1,5
1,8
2,1
Induttanza di rete
5
2
2
2
Corrente assorbita alla potenza nominale [Arms] 3,4
e tensione nominale con induttanza di
rete 1)
6,3
10,6
14,1
Potenza nominale con induttanza di rete
0,5
0,9
1,6
2,2
THD (total harmonic distortion) della cor- [%]
rente d'ingresso con induttanza di rete
100
107
93
86
Potenza dissipata con induttanza di rete 2) [W]
11
20
38
42
Corrente transitoria d'inserzione massima [A]
con induttanza di rete 3)
42
90
106
116
Tempo per la corrente transitoria di inser- [ms]
zione con induttanza di rete
3,5
3,2
3,6
4,0
Fusibile ausiliario massimo 4)
25
25
25
25
[mH]
[kW]
[A]
0198441113763, V1.02, 12.2009
1) In caso di prelievo della potenza nominale
2) Condizione: resistenza di frenatura interna non attiva; valore con corrente nominale, tensione nominale e potenza nominale;
valore pressoché proporzionale alla corrente
3) In caso estremo, impulso di disinserimento/inserimento prima dell'attivazione della limitazione corrente transitoria di inserzione,
tempo max. vedi righe seguenti
4) Fusibili: valvole fusibili di classe CC o J conformi a UL 248-4, in alternativa interruttori automatici con caratteristica B o C.
Possono essere utilizzati valori inferiori. Il fusibile deve essere scelto in modo che non si attivi con la corrente assorbita indicata.
Servoamplificatore AC
27
3 Dati tecnici
3.3.1.3
LXM32C
Dati per apparecchi trifase a 400 Vac
LXM32•...
U60N4•...
D12N4•...
D18N4•...
D30N4•...
D72N4•...
400 (3 ∼)
400 (3 ∼)
400 (3 ∼)
400 (3 ∼)
400 (3 ∼)
Tensione nominale
[V]
Corrente permanente in uscita
[Arms] 1,5
3
6
10
24
Corrente di punta in uscita (per 1 s)
[Arms] 6
12
18
30
72
Limitazione corrente transitoria di inserzione
[A]
4,3
9,4
19
19
57
Corrente assorbita alla potenza nominale [Arms] 1,4
e tensione nominale senza induttanza di
rete 1)
2,9
5,2
8,3
17,3
Potenza nominale senza induttanza di
rete
[kW]
0,4
0,9
1,8
3,0
7
Corrente di cortocircuito massima
ammessa della rete
[kA]
5
5
5
5
5
191
177
161
148
126
THD (total harmonic distortion) della cor- [%]
rente d'ingresso senza induttanza di rete
Potenza dissipata senza induttanza di
rete 2)
[W]
17
37
68
115
283
Corrente transitoria di inserzione massima senza induttanza di rete 3)
[A]
90
131
201
248
359
Tempo per la corrente transitoria di inser- [ms]
zione senza induttanza di rete
0,5
0,7
0,9
1,1
1,4
Induttanza di rete
2
2
1
1
1
Corrente assorbita alla potenza nominale [Arms] 1,8
e tensione nominale con induttanza di
rete 1)
3,4
6,9
11,1
22,5
Potenza nominale con induttanza di rete
0,8
1,6
3,3
5,6
13
THD (total harmonic distortion) della cor- [%]
rente d'ingresso con induttanza di rete
108
90
90
77
45
Potenza dissipata con induttanza di rete 2) [W]
19
40
74
125
308
Corrente transitoria d'inserzione massima [A]
con induttanza di rete 3)
28
36
75
87
112
Tempo per la corrente transitoria di inser- [ms]
zione con induttanza di rete
1,9
2,3
2,3
2,6
3,0
Fusibile ausiliario massimo 4)
30/32
30/32
30/32
30/32
30/32
[mH]
[kW]
[A]
0198441113763, V1.02, 12.2009
1) In caso di prelievo della potenza nominale
2) Condizione: resistenza di frenatura interna non attiva; valore con corrente nominale, tensione nominale e potenza nominale;
valore pressoché proporzionale alla corrente
3) In caso estremo, impulso di disinserimento/inserimento prima dell'attivazione della limitazione corrente transitoria di inserzione,
tempo max. vedi righe seguenti
4) Fusibili: valvole fusibili di classe CC o J conformi a UL 248-4, in alternativa interruttori automatici con caratteristica B o C.
Dato 30/32A: per UL sono ammessi al massimo 30 A
Possono essere utilizzati valori inferiori. Il fusibile deve essere scelto in modo che non si attivi con la corrente assorbita indicata.
28
Servoamplificatore AC
LXM32C
3.3.1.4
3 Dati tecnici
Dati per apparecchi trifase a 480 Vac
LXM32•...
U60N4•...
D12N4•...
D18N4•...
D30N4•...
D72N4•...
480 (3 ∼)
480 (3 ∼)
480 (3 ∼)
480 (3 ∼)
480 (3 ∼)
Tensione nominale
[V]
Corrente permanente in uscita
[Arms] 1,5
3
6
10
24
Corrente di punta in uscita (per 1 s)
[Arms] 6
12
18
30
72
Limitazione corrente transitoria di inserzione
[A]
11,3
23
23
68
Corrente assorbita alla potenza nominale [Arms] 1,2
e tensione nominale senza induttanza di
rete 1)
2,4
4,5
7,0
14,6
Potenza nominale senza induttanza di
rete
[kW]
0,4
0,9
1,8
3,0
7
Corrente di cortocircuito massima
ammessa della rete
[kA]
5
5
5
5
5
201
182
165
152
129
THD (total harmonic distortion) della cor- [%]
rente d'ingresso senza induttanza di rete
5,1
Potenza dissipata senza induttanza di
rete 2)
[W]
20
42
76
129
315
Corrente transitoria di inserzione massima senza induttanza di rete 3)
[A]
129
188
286
350
504
Tempo per la corrente transitoria di inser- [ms]
zione senza induttanza di rete
0,6
0,7
1,0
1,2
1,6
Induttanza di rete
2
2
1
1
1
Corrente assorbita alla potenza nominale [Arms] 1,6
e tensione nominale con induttanza di
rete 1)
2,9
6,0
9,6
19,5
Potenza nominale con induttanza di rete
0,8
1,6
3,3
5,6
13
THD (total harmonic distortion) della cor- [%]
rente d'ingresso con induttanza di rete
116
98
98
85
55
Potenza dissipata con induttanza di rete 2) [W]
21
44
82
137
341
Corrente transitoria d'inserzione massima [A]
con induttanza di rete 3)
43
57
116
137
177
Tempo per la corrente transitoria di inser- [ms]
zione con induttanza di rete
1,9
2,4
2,4
2,7
3,2
Fusibile ausiliario massimo 4)
30/32
30/32
30/32
30/32
30/32
[mH]
[kW]
[A]
0198441113763, V1.02, 12.2009
1) In caso di prelievo della potenza nominale
2) Condizione: resistenza di frenatura interna non attiva; valore con corrente nominale, tensione nominale e potenza nominale;
valore pressoché proporzionale alla corrente
3) In caso estremo, impulso di disinserimento/inserimento prima dell'attivazione della limitazione corrente transitoria di inserzione,
tempo max. vedi righe seguenti
4) Fusibili: valvole fusibili di classe CC o J conformi a UL 248-4, in alternativa interruttori automatici con caratteristica B o C.
Dato 30/32A: per UL sono ammessi al massimo 30 A
Possono essere utilizzati valori inferiori. Il fusibile deve essere scelto in modo che non si attivi con la corrente assorbita indicata.
Servoamplificatore AC
29
3 Dati tecnici
3.3.1.5
LXM32C
Corrente di uscita di punta
LXM32 ... D18N4
D30N4
D72N4
LXM32 ... U45M2
U30M2 230V
D18M2
I [%]
D30M2
300
200
100
0
0 1 2 3 4 5
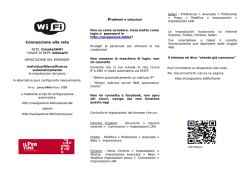
Illustrazione 3.3
10
15
20
25
30
t [s]
Corrente di uscita di punta nell'intervallo di tempo (riferita
alla corrente di uscita continua)
LXM32 ... U60N4
D12N4
I [%]
400
300
200
100
0
0 1 2 3 4 5
15
20
25
30
t [s]
Corrente di uscita di punta nell'intervallo di tempo (riferita
alla corrente di uscita continua)
0198441113763, V1.02, 12.2009
Illustrazione 3.4
10
30
Servoamplificatore AC
LXM32C
3.3.1.6
3 Dati tecnici
Dati del bus DC per apparecchi monofase
LXM32•... (1 ∼)
U45M2
U90M2
D18M2
D30M2
Tensione nominale (1 ∼)
[V]
115
230
115
230
115
230
115
230
Tensione nominale bus DC
[V]
163
325
163
325
163
325
163
325
Limite di sottotensione
[V]
55
130
55
130
55
130
55
130
Limite di tensione: avvio Quick Stop
[V]
60
140
60
140
60
140
60
140
Limite di sovratensione
[V]
450
450
450
450
450
450
450
450
Potenza continua massima tramite bus
DC
[kW]
0,2
0,5
0,4
0,9
0,8
1,6
0,8
2,2
Corrente continua massima tramite bus
DC
[A]
1,5
1,5
3,2
3,2
6,0
6,0
10,0
10,0
3.3.1.7
Dati del bus DC per apparecchi trifase
LXM32•... (3 ∼)
U60N4
D12N4
D18N4
D30N4
D72N4
[V]
400
480
400
480
400
480
400
480
400
480
Tensione nominale bus DC
[V]
566
679
566
679
566
679
566
679
566
679
Limite di sottotensione
[V]
350
350
350
350
350
350
350
350
350
350
Limite di tensione: avvio Quick Stop
[V]
360
360
360
360
360
360
360
360
360
360
Limite di sovratensione
[V]
820
820
820
820
820
820
820
820
820
820
Potenza continua massima tramite bus
DC
[kW]
0,8
0,8
1,6
1,6
3,3
3,3
5,6
5,6
13,0
13,0
Corrente continua massima tramite bus
DC
[A]
1,5
1,5
3,2
3,2
6,0
6,0
10,0
10,0
22,0
22,0
0198441113763, V1.02, 12.2009
Tensione nominale (3 ∼)
Servoamplificatore AC
31
3 Dati tecnici
3.3.2
LXM32C
Alimentazione di controllo 24 V
Alimentazione 24V
La tensione +24VDC per l'alimentazione di controllo deve essere conforme alle indicazioni della norma IEC 61131-2 (unità di alimentazione
standard PELV):
Tensione d'ingresso
[Vdc]
24 V -15% / +20% 1)
Corrente assorbita (senza carico) [A]
≤1 2)
Ondulazione residua (Ripple)
<5%
1) In caso di connessione di motori privi di freno d'arresto; nel caso di motori con
freno d'arresto: vedere il diagramma seguente
2) Corrente assorbita: freno d'arresto non considerato
Se viene connesso un motore con freno d'arresto, la tensione 24 Vdc per
l'alimentazione di controllo deve essere adeguata in funzione del motore
connesso e della lunghezza del cavo motore. Dal seguente diagramma
è possibile rilevare la tensione da utilizzare come alimentazione di controllo per il rilascio del freno su CN2. La tolleranza di tensione è ±5% .
[Vdc]
29
BMH205
28
27
BSH100x
BSH140x
26
BSH055x
BSH070x
25
BMH070x
BMH100x
BMH140x
24
23
0
10
20
30
40
60
70
80
90
100 [m]
La tensione dell'alimentazione di controllo dipende dal
motore e dalla lunghezza del cavo motore.
0198441113763, V1.02, 12.2009
Illustrazione 3.5
50
32
Servoamplificatore AC
LXM32C
3.3.3
3 Dati tecnici
Segnali
Gli ingressi e le uscite digitali di questo prodotto possono essere cablati
con tipo di logica 1 o con tipo di logica 2.
1
+24V
0V
Illustrazione 3.6
2
+24V
DQ_COM
DQ_COM
DQ0,DQ1,...
DQ0,DQ1,...
DI0,DI1,...
DI0,DI1,...
DI_COM
0V
DI_COM
Tipo di logica
Tipo di logica
Stato attivo
(1) Tipo di logica 1
L'uscita eroga corrente (Source)
La corrente scorre nell'ingresso
(2) Tipo di logica 2
L'uscita preleva corrente (Sink)
La corrente proviene dall'ingresso
Gli ingressi dei segnali sono protetti contro le inversioni di polarità, le
uscite sono resistenti ai corto circuiti. Gli ingressi e le uscite sono separati galvanicamente.
Segnali analogici in ingresso
Segnali d'ingresso digitali 24 V
Circuito di ingresso differenziale fascia di tensione
[V]
-10 ... +10
Resistenza di ingresso tipica
[kΩ]
20
Risoluzione AI1, AI2
[Bit]
14
Pericolo di campionamento AI1,
AI2
[ms]
0,25
I livelli degli ingressi optoisolati DI• nel cablaggio come tipo di logica 1
sono conformi alla norma EN 61131-2, tipo 1.
Logico 0 (Ulow)
[Vdc]
-3 ... +5
Logico 1 (Uhigh)
[Vdc]
+15 ... +30
Corrente d'ingresso (tipica)
[mA]
5
Tempo di scatto protezione antirimbalzo 1)
[ms]
1,5
0198441113763, V1.02, 12.2009
1) Impostabile tramite parametri (pericolo di campionamento 250 µs)
Servoamplificatore AC
33
3 Dati tecnici
LXM32C
Cattura segnali d'ingresso 24 V
Segnali d'ingresso funzione di
sicurezza STO
Segnali in uscita 24V
Segnali encoder
I livelli degli ingressi optoisolati Cap• nel cablaggio come "tipo di
logica 1" sono conformi alla norma EN 61131-2, tipo 1.
Logico 0 (Ulow)
[Vdc]
-3 ... +5
Logico 1 (Uhigh)
[Vdc]
+15 ... +30
Corrente d'ingresso (tipica)
[mA]
5
Tempo di antirimbalzo CAP1 e
CAP2
[μs]
2
Jitter CAP1 e CAP2
[μs]
<2
Logico 0 (Ulow)
[Vdc]
-3 ... +5
Logico 1 (Uhigh)
[Vdc]
+15 ... +30
Corrente d'ingresso (tipica)
[mA]
5
Tempo di antirimbalzo STO_A e
STO_B
[ms]
>1
Identificazione delle differenze di
segnale tra STO_A e STO_B
[s]
>1
Tempo di reazione della funzione
di sicurezza STO
[ms]
≤10
I livelli dei segnali di uscita digitali 24 V DQ• sono conformi alla norma
IEC 61131-2.
Tensione di uscita
[V]
≤30
Corrente di scatto massima
[mA]
≤100
Caduta di tensione con carico di
100mA
[V]
≤3
I segnali encoder sono conformi alle specifiche Stegmann Hiperface
Tensione di uscita per encoder
+10V / 100mA
Campo di tensione segnale
d'ingresso SIN/COS
1Vpp con 2,5 V offset,
0,5 Vpp a 100 kHz
Resistenza di entrata
[Ω]
120
0198441113763, V1.02, 12.2009
La tensione di uscita è resistente ai corto circuiti e protetta contro i sovraccarichi. Il protocollo di trasmissione è half duplex asincrono secondo RS485.
34
Servoamplificatore AC
LXM32C
3.3.3.1
3 Dati tecnici
Uscita PTO (CN4)
Sull'uscita PTO (Pulse Train Out, CN4) vengono emessi i segnali da 5 V.
A seconda del parametro PTO_mode questi sono segnali ESIM (simulazione encoder) o segnali di ingresso PTI inoltrati (segnali P/D, segnali
A/B, segnali CW/CCW). I segnali di uscita PTO possono essere utilizzati
come segnale di ingresso PTI per un altro apparecchio. I segnali di
uscita PTO hanno 5 V, anche se il segnale di ingresso PTI è un segnale
da 24 V.
Il livello di segnalazione è conforme a RS422. A causa della corrente assorbita dall'optoisolatore nel circuito di ingresso, non è ammesso il collegamento in parallelo da un'uscita eccitatore su diversi apparecchi.
Con risoluzione quadrupla la risoluzione di base della simulazione encoder nei motori rotativi è di 4096 incrementi/rotazione.
+
-
1
A
0
B
1
0
..7
8
9
...
12 13 14
15
14 13
...
9
8..
1
I
0
Illustrazione 3.7
Segnale di uscita PTO
Diagramma temporale con segnali A, B e impulsi di posizione, conteggio in ordine crescente e decrescente
I segnali di uscita PTO sono conformi alla specifica dell'interfaccia
RS422.
Livello logico
conforme a RS422 1)
Frequenza di uscita per segnale
[kHz] ≤500
Incrementi motore per secondo
[Inc/s] ≤1,6 * 106
0198441113763, V1.02, 12.2009
1) A causa della corrente assorbita dall'optoisolatore nel circuito di ingresso, non è
ammesso il collegamento in parallelo da un'uscita eccitatore su diversi apparecchi
Servoamplificatore AC
35
3 Dati tecnici
3.3.3.2
LXM32C
Ingresso PTI (CN5)
@ AVVERTENZA
MOVIMENTO INASPETTATO
La trasmissione di segnali errati o disturbati come valori di consegna
può provocare movimenti inaspettati.
•
Utilizzare cavi schermati twisted-pair.
•
Utilizzare per l'interfaccia la modalità operativa con segnali in
controfase.
•
Evitare l'utilizzo di segnali non in controfase nelle applicazioni critiche o in ambienti disturbati.
•
Evitare di utilizzare segnali non in controfase quando i cavi superano la lunghezza di 3m e limitare la frequenza a 50kHz
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
In corrispondenza dell'ingresso PTI (Pulse Train In) è possibile connettere segnali 5 V o segnali 24 V. Possono essere collegati segnali A/B, P/
D (impulso/direzione) oppure CW/CCW (impulso positivo/impulso negativo). Vedere anche il capitolo 6.2.11 "Connessione PTI (CN5, Pulse
Train In)" a pagina 110.
Connessione degli ingressi segnale
PTI
La connessione degli ingressi si riflette sulla frequenza di ingresso massima ammessa e sulla lunghezza massima ammessa dei cavi:
Connessione ingressi
Frequenza di ingresso massima
Lunghezza dei cavi massima
100 m
Push pull, vedere Illustrazione 3.8 al cen- 0,2 MHz
tro
10 m
Open collector, vedere Illustrazione 3.8 a 0,01 MHz
destra
1m
0198441113763, V1.02, 12.2009
RS422, vedere Illustrazione 3.8 a sinistra 1 MHz
36
Servoamplificatore AC
LXM32C
3 Dati tecnici
5Vdc
RS422
OpenCollector
PushPull
5VDC
A
A
B
B
B
C
C
C
24Vdc
5VDC
A
PushPull
24VDC
OpenCollector
24VDC
A
A
B
B
C
C
Illustrazione 3.8
Ingresso
Pin 1)
RS422 2)
5V
24 V
A
Pin7
riservato
riservato
PULSE(24)
ENC_A(24)
CW(24)
Pin8
riservato
riservato
DIR(24)
ENC_B(24)
CCW(24
Pin1
PULSE(5)
ENC_A(5)
CW(5)
PULSE(5)
ENC_A(5)
CW(5)
riservato
Pin4
DIR(5)
ENC_B(5)
CCW(5)
DIR(5)
ENC_B(5)
CCW(5)
riservato
Pin2
PULSE
ENC_A
CW
PULSE
ENC_A
CW
PULSE
ENC_A
CW
Pin5
DIR
ENC_B
CCW
DIR
ENC_B
CCW
DIR
ENC_B
CCW
B
C
0198441113763, V1.02, 12.2009
Connessione degli ingressi dei segnali: RS422, Push Pull e
Open Collector
1) Tenere conto dei diversi accoppiamenti nel Twisted Pair:
Pin1/Pin2 e Pin4/Pin5 per RS422 e 5 V;
Pin7/Pin2 e Pin8/Pin5 per 24V
2) A causa della corrente assorbita dall'optoisolatore nel circuito di ingresso, non è ammesso il collegamento in parallelo da
un'uscita eccitatore su diversi apparecchi
Servoamplificatore AC
37
3 Dati tecnici
LXM32C
Funzione P/D
In corrispondenza dell'ingresso PTI è possibile emettere segnali esterni
impulso/direzione P/D come valori di consegna nel modo operativo
Electronic Gear.
Con il fronte di salita del segnale rettangolare PULSE il motore esegue
un movimento. La direzione viene gestita con il segnale DIR.
Segnale
Valore
Funzione
PULSE
0 -> 1
Movimento motore
DIR
0 / open
direzione positiva
1
1
PULSE
0
2
2
3
4
1
DIR
0
2
+
Illustrazione 3.9
+
-
+
Diagramma temporale con segnale di impulso/direzione
Valore minimo
Durata periodo (impulso)
1 μs
(1)
Durata impulso (impulso)
0,4 μs
(2)
Lead Time (Dir-Imp)
0 μs
(3)
Hold Time (Imp-Dir)
0,4 μs
(4)
0198441113763, V1.02, 12.2009
Tempi di impulso/direzione
38
Servoamplificatore AC
LXM32C
3 Dati tecnici
Funzione segnali A/B
In corrispondenza dell'ingresso PTI possono essere emessi segnali
esterni A/B come valori di consegna nel modo operativo Electronic
Gear.
Segnale
Valore
Funzione
Segnale A prima del
segnale B
Movimento in direzione
positiva
Segnale B prima del
segnale A
Movimento in direzione
negativa
1
A
1
0
2
2
3
3
1
B
0
..7
8
9
...
12 13 14
15
14 13
+
Illustrazione 3.10
...
9
8..
-
Diagramma temporale con segnale A/B, conteggio in ordine
crescente e decrescente
Valore minimo
Durata periodo A, B
1 μs
(1)
Durata impulso
0,4 μs
(2)
Lead Time (A,B)
200 ns
(3)
0198441113763, V1.02, 12.2009
Tempi di impulso/direzione
Servoamplificatore AC
39
3 Dati tecnici
Funzione CW/CCW
LXM32C
In corrispondenza dell'ingresso PTI possono essere emessi segnali
CW/CCW (impulso positivo/impulso negativo) come valori di consegna
nel modo operativo Electronic Gear.
Con il fronte di salita del segnale CW il motore esegue un movimento in
direzione positiva. Con il fronte di salita del segnale CCW il motore esegue un movimento in direzione negativa.
Segnale
Valore
Funzione
CW
0 -> 1
Movimento in direzione
positiva
CCW
0 -> 1
Movimento in direzione
negativa
1
1
CW
0
2
2
1
CCW
0
3
+
Illustrazione 3.11
2
+
2
-
-
Diagramma temporale con "CW/CCW"
Valore minimo
Durata periodo CW/CCW
1 μs
(1)
Durata impulso
0,4 μs
(2)
Lead Time (CW-CCW,
CCW-CW)
0 μs
(3)
0198441113763, V1.02, 12.2009
Tempi di impulso/direzione
40
Servoamplificatore AC
LXM32C
3.3.4
3 Dati tecnici
Sicurezza funzionale
Dati per il piano di manutenzione e i
calcoli relativi alla sicurezza
Per il piano di manutenzione e i calcoli relativi alla sicurezza fare riferimento ai seguenti dati della funzione di sicurezza STO:
Durata di vita (IEC 61508)
Anni
20
SFF (IEC 61508)
Safe Failure Fraction
[%]
80
HFT (IEC 61508)
Hardware Fault Tolerance
Tipo sottosistema A
1
SIL
IEC 61508
IEC 62061
PFH (IEC 61508)
Probability of Dangerous Hardware Failure per Hour
SIL3
SILCL3
[1/h] 1*10-9
(FIT) (1)
PL (ISO 13849-1)
Performance Level
e (categoria 3)
Anni
1400
DC (ISO 13849-1)
Diagnostic Coverage
[%]
90
0198441113763, V1.02, 12.2009
Tempo medio al guastod
(ISO 13849-1)
Mean Time to Dangerous Failure
Servoamplificatore AC
41
3 Dati tecnici
3.3.5
LXM32C
Resistenza di frenatura
L'apparecchio dispone di una resistenza di frenatura interna. Se la resistenza di frenatura interna non è sufficiente per la dinamica di applicazione, occorre impiegare una o più resistenze di frenatura esterne.
I valori minimi di resistenza indicati per le resistenze di frenatura esterne
non devono essere superati per difetto. Se mediante il corrispondente
parametro viene attivata una resistenza di frenatura esterna, la resistenza di frenatura interna viene disinserita.
Ulteriori informazioni sul tema
Pagina
Dimensionamente della resistenza di frenatura
66
Montaggio di una resistenza di frenatura esterna (accessorio)
85
Installazione elettrica resistenza di frenatura (accessorio)
99
Impostazione dei parametri per la resistenza di frenatura
152
Dati per l'ordinazione di resistenze di frenatura esterne (acces- 377
sori)
LXM32•...
U45M2
U90M2
D18M2
D30M2
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 115 V
30
60
89
119
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 200 V
17
34
52
69
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 230 V
9
18
26
35
Capacità
[μF]
390
780
1170
1560
Valore di resistenza della resistenza
interna di frenatura
[Ω]
94
47
20
10
Potenza continua resistenza di frenatura
PPR
[W]
10
20
40
60
Energia massima ECR
[Ws]
82
166
330
550
Tensione di scatto
[V]
430
430
430
430
Resistenza di frenatura esterna minima
[Ω]
68
36
20
12
Resistenza di frenatura esterna massima [Ω]
110
55
27
16
Potenza continua massima resistenza di
frenatura esterna
200
400
600
800
0198441113763, V1.02, 12.2009
[W]
42
Servoamplificatore AC
LXM32C
3 Dati tecnici
LXM32•...
U60N4
D12N4
D18N4
D30N4
D72N4
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 380 V
14
25
50
73
145
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 400 V
12
22
43
62
124
Energia assorbita dai condensatori interni [Ws]
Evar con tensione nominale 480 V
3
5
10
14
28
Capacità
[μF]
110
195
390
560
1120
Valore di resistenza della resistenza
interna di frenatura
[Ω]
132
60
30
30
10
Potenza continua resistenza di frenatura
PPR
[W]
20
40
60
100
150
Energia massima ECR
[Ws]
200
400
600
1000
2400
Tensione di scatto
[V]
780
780
780
780
780
Resistenza di frenatura esterna minima
[Ω]
100
47
33
15
8
Resistenza di frenatura esterna massima 1)
[Ω]
145
73
50
30
12
Potenza continua massima resistenza di
frenatura esterna
[W]
200
500
800
1500
3000
1) La resistenza di frenatura massima indicata può anche ridurre la potenza massima dell'apparecchio. A seconda dell'applicazione può essere utilizzata anche una resistenza maggiore
3.3.5.1
Resistenze di frenatura esterne (accessorio)
VW3A760...
1Rxx 1)
2Rxx
3Rxx
4Rxx 1)
5Rxx
6Rxx
7Rxx 1)
Valore di resistenza
[Ω]
10
27
27
27
72
72
72
Potenza continua
[W]
400
100
200
400
100
200
400
Durata d'inserimento massima a 115 V / [s]
230 V
0,72
0,552
1,08
2,64
1,44
3,72
9,6
Durata d'inserimento massima a 400 V
[s]
0,12
0,084
0,216
0,504
0,3
0,78
1,92
Potenza massima a 115 V / 230 V
[kW] 18,5
6,8
6,8
6,8
2,6
2,6
2,6
Potenza massima a 400V
[kW] 60,8
22,5
22,5
22,5
8,5
8,5
8,5
Energia di picco massima a 115 V /
230 V
[Ws] 13300
3800
7400
18100
3700
9600
24700
Energia di picco massima a 400 V
[Ws] 7300
1900
4900
11400
2500
6600
16200
IP65
IP65
IP65
IP65
IP65
IP65
IP65
Grado di protezione
Omologazione UL (N.file)
E233422 E233422
E233422 E233422
0198441113763, V1.02, 12.2009
1) Le resistenze con potenza continua di 400 W NON sono conformi ai requisiti UL/CSA.
Servoamplificatore AC
43
3 Dati tecnici
LXM32C
VW3A77...
04
05
Valore di resistenza
[Ω]
15
10
Potenza continua
[W]
1000
1000
Durata d'inserimento massima a 115 V / [s]
230 V
3,5
1,98
Durata d'inserimento massima a 400 V
[s]
0,65
0,37
Potenza massima a 115 V / 230 V
[kW] 18,5
12,3
Potenza massima a 400V
[kW] 60,8
40,6
Energia di picco massima a 115 V /
230 V
[Ws] 43100
36500
Energia di picco massima a 400 V
[Ws] 26500
22500
IP20
IP20
Omologazione UL (N.file)
E221095 E221095
0198441113763, V1.02, 12.2009
Grado di protezione
44
Servoamplificatore AC
LXM32C
3.3.6
3 Dati tecnici
Filtro di rete interno
Valori limite
Ulteriori informazioni sul tema
Pagina
Progettazione filtro di rete esterno (accessorio)
64
Montaggio filtro di rete esterno (accessori)
85
Installazione elettrica filtri di rete esterni (accessori)
102
Dati di ordinazione filtri di rete esterni (accessori)
384
Se in fase di installazione vengono rispettate le misure CEM descritte
nel presente manuale, il prodotto risponde ai requisiti CEM secondo la
norma IEC 61800-3.
Se la combinazione scelta non prevede la categoria C1, occorre rispettare la seguente nota:
@ AVVERTENZA
INTERFERENZE AD ALTA FREQUENZA
In ambiente residenziale questo prodotto può causare interferenze ad
alta frequenza che possono rendere necessaria l'adozione di soppressori di disturbi.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
Emissioni
I seguenti valori limite per disturbi vengono rispettati in caso di struttura
conforme CEM e impiego dei cavi disponibili come accessori:
LXM32•
Disturbi condotti
dall'alimentazione
Disturbi dovuti al campo
•••M2 con cavo
categoria C2
motore lungo fino a
10 m
categoria C3
•••M2 con cavo
categoria C3
motore lungo da 10
m a 20 m
categoria C3
•••M2 con cavo
motore lungo oltre
20 m
non ammessa
non ammessa
•••N4 con cavo
categoria C3
motore lungo fino a
20 m
categoria C3
•••N4 con cavo
motore lungo oltre
20 m
non ammessa
non ammessa
0198441113763, V1.02, 12.2009
Per l'impiego di cavi motore di lunghezza maggiore occorre inserire a
monte un filtro di rete esterno. I dati tecnici dei filtri di rete esterni disponibili come accessorio sono indicati a pagina 46.
Servoamplificatore AC
45
3 Dati tecnici
3.3.7
LXM32C
Filtro di rete esterno (accessorio)
Il rispetto delle Direttive CEM deve essere assicurato dal gestore in caso
di impiego di filtri di rete esterni.
Emissioni
Ulteriori informazioni sul tema
Pagina
Progettazione filtro di rete esterno (accessorio)
64
Montaggio filtro di rete esterno (accessori)
85
Installazione elettrica filtri di rete esterni (accessori)
102
Dati di ordinazione filtri di rete esterni (accessori)
384
I valori limite indicati vengono rispettati in caso di utilizzo dei filtri di rete
indicati tra gli accessori.
I seguenti valori limite per disturbi vengono rispettati in caso di struttura
conforme CEM e impiego dei cavi disponibili come accessori:
LXM32•
46
Disturbi dovuti al campo
•••M2 con cavo
categoria C1
motore lungo fino a
20 m
categoria C3
•••M2 con cavo
categoria C2
motore lungo da 20
m a 50 m
categoria C3
•••M2 con cavo
categoria C3
motore lungo da 50
m a 100 m
categoria C3
•••M2 con cavo
motore lungo oltre
100 m
non ammessa
non ammessa
categoria C1
•••N4 con cavo
motore lungo fino a
20 m
categoria C3
categoria C2
•••N4 con cavo
motore lungo da 20
m a 50 m
categoria C3
categoria C3
•••N4 con cavo
motore lungo da 50
m a 100 m
categoria C3
•••N4 con cavo
motore lungo oltre
100 m
non ammessa
non ammessa
Più apparecchi possono essere connessi ad un filtro di rete esterno comune. Requisiti:
•
Gli apparecchi monofase possono essere connessi solo a filtri di
rete monofase mentre gli apparecchi trifase possono essere connessi solo a filtri di rete trifase.
•
La corrente assorbita complessivamente dagli apparecchi connessi
deve essere inferiore o uguale alla corrente nominale ammessa del
filtro di rete.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Filtro di rete esterno comune
Disturbi condotti
dall'alimentazione
LXM32C
3 Dati tecnici
Abbinamento del filtro di rete
esterno al tipo di apparecchio
3.3.8
Tipo di apparecchio 1 ∼
Numero di ordinazione filtro di
rete
LXM32•U45M2 (230 V, 1,5 A, 1 ∼)
VW3A31401 (9 A, 1 ∼)
LXM32•U90M2 (230 V, 3 A, 1 ∼)
VW3A31401 (9 A, 1 ∼)
LXM32•D18M2 (230 V, 6 A, 1 ∼)
VW3A31403 (16 A, 1 ∼)
LXM32•D30M2 (230 V, 10 A, 1 ∼)
VW3A31403 (16 A, 1 ∼)
Tipo di apparecchio 3 ∼
Numero di ordinazione filtro di
rete
LXM32•U60N4 (480 V, 1,5 A, 3 ∼)
VW3A31404 (15 A, 3 ∼)
LXM32•D12N4 (480 V, 3 A, 3 ∼)
VW3A31404 (15 A, 3 ∼)
LXM32•D18N4 (480 V, 6 A, 3 ∼)
VW3A31404 (15 A, 3 ∼)
LXM32•D30N4 (480 V, 10 A, 3 ∼)
VW3A31404 (15 A, 3 ∼)
LXM32•D72N4 (480 V, 24 A, 3 ∼)
VW3A31406 (25 A, 3 ∼)
Induttanza di rete (accessorio)
Induttanza di rete
Se l'alimentazione dalla rete non è conforme ai requisiti indicati relativi
all'impedenza1, occorre inserire a monte delle induttanze di rete. Le induttanze di rete riducono le armoniche nell'alimentazione dalla rete aumentando così la durata dell'apparecchio.
0198441113763, V1.02, 12.2009
Un altro vantaggio di un'induttanza di rete a monte è costituito da una
maggiore potenza continua dell'apparecchio.
Ulteriori informazioni sul tema
Pagina
Progettazione dell'induttanza di rete (accessorio)
63
Montaggio induttanza di rete (accessori)
85
Installazione elettrica induttanza di rete (accessori)
102
Dati di ordinazione induttanza di rete (accessori)
383
1. La corrente massima di cortocircuito di una rete serve da parametro per l'impedenza di rete
Servoamplificatore AC
47
3 Dati tecnici
3.4
LXM32C
Condizioni per la UL 508C
Se viene impiegato un prodotto in conformità con la UL 508C occorre
soddisfare anche le seguenti condizioni:
Temperatura ambiente durante il
funzionamento
Grado d'inquinamento
Fusibili
Temperatura ambiente
[°C]
Grado d'inquinamento
2
Utilizzare valvole fusibili della classe J conformi alla norma UL 248-4.
Fusibile ausiliario massimo per
LXM32••••N4
Cablaggio
0 ... +50
[A]
30
Utilizzare almeno cavi in rame 60/75 °C.
Apparecchi trifase 400/480 V
Gli apparecchi trifase400/480 V possono funzionare al massimo con reti
da 480Y/277Vac.
Categoria sovratensione
Al momento dell'installazione finale deve essere presente in tutte le fasi
dell'allacciamento alla rete per l'azionamento per i sistemi monofase un
dispositivo di protezione dalla sovratensione Schneider Electric
TVS230XR40, mentre per i sistemi trifase un dispositivo di protezione
dalla sovratensione Schneider Electric TVS4XW100C o un dispositivo
di protezione dalla sovratensione elencato da UL con la seguente marcatura:
UL Category Code VZCA
Type 1 or 2
Operating Voltage 240V for 1-phase systems and 480Y/277V for 3phase systems
Voltage Protection Rating (VPR) max. 4000V
Nominal Discharge Current Rating (In) min. 3kA
3.5
Certificazioni
Il presente prodotto è stato certificato:
Numero assegnato
Validità
TÜV Nord
SAS-192/2008TB-1
2014-06-25
UL
E198280
0198441113763, V1.02, 12.2009
Certificato da
48
Servoamplificatore AC
LXM32C
3.6
3 Dati tecnici
Dichiarazione di conformità
La seguente dichiarazione di conformità è valida in caso di impiego del
prodotto entro le condizioni specificate e con i cavi indicati negli accessori.
SCHNEIDER ELECTRIC MOTION DEUTSCHLAND GmbH
Breslauer Str. 7 D-77933 Lahr
EC DECLARATION OF CONFORMITY
YEAR 2009
according to EC Directive on Machinery 2006/42/EC
according to EC Directive EMC 2004/108/EC
according to EC Directive Low Voltage 2006/95/EC
0198441113763, V1.02, 12.2009
We hereby declare that the products listed below meet the requirements of the EC
Directives indicated with respect to design, construction and version distributed by us. This
declaration becomes invalid in the case of any modification to the products not authorized
by us.
Designation:
AC Servo drive including modules
Type:
LXM32Axxxxx, LXM32Cxxxxx, LXM32Mxxxxx,
VW3A3607, VW3A3608, VW3A3616, VW3A3618,
VW3M3301,VW3M3401, VW3M3402, VW3M3403, VW3M3501
Applied
harmonized
standards,
especially:
EN ISO 13849-1:2008, Performance Level "e"
EN 61508:2001, SIL 3
EN 61800-5-1:2007
EN 61800-3:2004, second environment
Applied
national standards
and technical
specifications,
especially:
UL 508C
CSA C22.2 No. 14-05
Product documentation
Company stamp:
Date/Signature:
1 October 2009
Name/Department:
Wolfgang Brandstätter/Development
Servoamplificatore AC
49
3 Dati tecnici
Certificato TÜV di sicurezza funzionale
0198441113763, V1.02, 12.2009
3.7
LXM32C
50
Servoamplificatore AC
LXM32C
4 Fondamenti
4
Fondamenti
4.1
Sicurezza funzionale
4
Automazione e tecnologia di sicurezza erano in passato due settori nettamente separati, mentre oggi crescono sempre più in intima connessione tra loro. L'adozione di funzioni di sicurezza integrate semplifica
notevolmente tanto la progettazione quanto l'installazione di soluzioni di
automazione complesse.
In generale i requisiti che la tecnologia di sicurezza è chiamata a soddisfare dipendono dal tipo di applicazione. La severità di tali requisiti è determinata dai rischi e dai pericoli potenziali derivanti dall'applicazione
interessata.
La funzione di sicurezza integrata STO (IEC 61800-5-2) consente di realizzare uno Stop di categoria 0 secondo IEC 60204-1 senza l'impiego
di relè di potenza esterni. Non è necessario interrompere la tensione di
alimentazione. In tal modo si riducono i costi di sistema e i tempi di reazione.
Norma IEC61508
La norma IEC 61508 "Sicurezza funzionale dei sistemi di controllo elettronici/elettrici/programmabili rilevanti per la sicurezza" prende in considerazione la funzione rilevante per la sicurezza. Essa non si rivolge
esclusivamente ai singoli componenti, bensì considera sempre come
singola unità l'intera catena funzionale (a partire, ad esempio, dal sensore per arrivare alle unità di elaborazione elettronica e da queste all'attuatore vero e proprio). Tale catena funzionale deve soddisfare nel suo
insieme i requisiti del corrispondente livello di integrità di sicurezza. Partendo da questa base vengono sviluppati sistemi e componenti utilizzabili in diversi ambienti di applicazione per funzioni di sicurezza che
presentano livelli di rischio tra loro equivalenti.
SIL, Safety Integrity Level
La norma IEC 61508 definisce 4 livelli di integrità di sicurezza (SIL) per
le funzioni di sicurezza. SIL1 è il livello più basso e SIL4 il più alto. Il
punto di partenza per determinare il livello di integrità di sicurezza è la
valutazione del potenziale di pericolo in base alle analisi dei pericoli e
dei rischi. L'analisi permette di stabilire se la catena funzionale interessata necessita di una funzione di sicurezza e quale livello di pericolosità
potenziale quest'ultima debba coprire.
0198441113763, V1.02, 12.2009
Funzione di sicurezza integrata
"Safe Torque Off" STO
Servoamplificatore AC
51
4 Fondamenti
LXM32C
PFH, Probability of a dangerous
failure per hour
HFT e SFF
Per garantire l'efficienza della funzione di sicurezza, la norma IEC61508
prescrive l'adozione di misure volte a fronteggiare e a prevenire i guasti
secondo una scala che dipende dal livello SIL richiesto. Tutti i componenti di una funzione di sicurezza devono essere sottoposti ad un'analisi
di probabilità per valutare l'efficacia delle misure adottate per fronteggiare i guasti. In quest'ambito vengono calcolati i PFH (probability of a
dangerous failure per hour) per i sistemi di sicurezza. Si tratta della probabilità su scala oraria che un sistema di sicurezza subisca un guasto
pericoloso e che la funzione di sicurezza non possa più essere eseguita
correttamente. Il valore PFH non deve superare i valori fissati per l'intero
sistema di sicurezza in funzione del relativo SIL. singoli PFH di una catena funzionale vengono sommati tra loro. Il valore PFH totale non deve
superare il valore massimo prescritto dalla norma.
SIL
PFH con richiesta elevata o continua
4
≥10-9 ... <10-8
3
≥10-8 ... <10-7
2
≥10-7 ... <10-6
1
≥10-6 ... <10-5
In funzione del livello SIL del sistema di sicurezza la norma IEC 61508
prescrive una certa tolleranza di errore hardware HFT (hardware fault
tolerance) associata a una determinata percentuale di guasti non pericolosi SFF (safe failure fraction). La tolleranza di errore hardware è la
capacità di un sistema di eseguire la funzione di sicurezza richiesta nonostante la presenza di uno o più errori hardware. La percentuale SFF
di un sistema è definita come il rapporto tra la percentuale di guasti non
pericolosi e la percentuale di guasto totale di un sistema. Secondo la
norma IEC 61508 il massimo livello SIL ottenibile per un sistema è determinato congiuntamente dalla tolleranza di guasto hardware HFT e
dalla Safe Failure Fraction SFF del sistema.
SFF
Misure di prevenzione dei guasti
52
HFT tipo sottosistema A
HFT tipo sottosistema A
0
1
2
0
1
2
< 60%
SIL1
SIL2
SIL3
---
SIL1
SIL2
60% ... <90%
SIL2
SIL3
SIL4
SIL1
SIL2
SIL3
90% ... < 99%
SIL3
SIL4
SIL4
SIL2
SIL3
SIL4
≥99%
SIL3
SIL4
SIL4
SIL3
SIL4
SIL4
Gli errori sistematici a livello di specifica, di hardware e di software nonché gli errori dovute all'utilizzo o alla scarsa manutenzione del sistema
di sicurezza devono essere evitati nella misura più ampia possibile. La
norma IEC 61508 prescrive a tale proposito una serie di misure preventive da mettere in atto a seconda del SIL da ottenere. Tali misure preventive devono accompagnare l'intero ciclo di vita del sistema di
sicurezza, ovvero dal momento della concezione al disinserimento del
sistema.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Nella norma IEC 61508 si distinguono due tipi di sottosistema (sottosistema di tipo A, sottosistema di tipo B). Questi tipi sono fissati sulla base
di criteri definiti nella norma per i componenti tecnicamente rilevanti ai
fini della sicurezza.
LXM32C
5
5 Progettazione
Progettazione
5
Il presente capitolo fornisce informazioni sull'impiego del prodotto, che
sono indispensabili per una progettazione.
Pagina
5.1 "Compatibilità elettromagnetica, CEM"
54
5.2 "Cavi"
58
5.3 "Dispositivo di sicurezza per correnti disperse"
61
5.4 "Esercizio in rete IT"
61
5.5 "Collegamento in parallelo del bus DC"
62
5.6 "Induttanza di rete"
63
5.7 "Filtri di rete"
64
5.8 "Dimensionamento della resistenza di frenatura"
66
5.9 "Funzione di sicurezza STO ("Safe Torque Off")"
73
5.10 "Tipo di logica"
78
5.11 "Funzioni di monitoraggio"
79
5.12 "Ingressi e uscite configurabili"
79
0198441113763, V1.02, 12.2009
Tema
Servoamplificatore AC
53
5 Progettazione
5.1
LXM32C
Compatibilità elettromagnetica, CEM
@ AVVERTENZA
ANOMALIA DI SEGNALI E APPARECCHI
Eventuali segnali disturbati possono provocare reazioni impreviste
dell'apparecchio.
•
Realizzare il cablaggio rispettando le misure precauzionali in
materia di compatibilità elettromagnetica.
•
Verificare la corretta esecuzione delle misure volte a garantire la
compatibilità elettromagnetica.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Valori limite
Se in fase di installazione vengono rispettate le misure CEM descritte
nel presente manuale, il prodotto risponde ai requisiti CEM secondo la
norma IEC 61800-3.
Se la combinazione scelta non prevede la categoria C1, occorre rispettare la seguente nota:
@ AVVERTENZA
INTERFERENZE AD ALTA FREQUENZA
In ambiente residenziale questo prodotto può causare interferenze ad
alta frequenza che possono rendere necessaria l'adozione di soppressori di disturbi.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
Il rispetto dei valori limite indicato presuppone che sia stata eseguita
correttamente l'installazione a norma CEM. Rispettare le seguenti esigenze:
Struttura dell'armadio elettrico
Provvedimenti CEM
Target
Utilizzo di piastre di montaggio zincate o cromate, Buona conducibilità per
collegamento delle parti metalliche su superfici di
contatto superficiale.
una certa estensione, rimozione dello strato di vernice dalle superfici di appoggio.
Integrare i dispositivi di scatto, quali contattori, relè Riduzione dell'accoppiao elettrovalvole, con combinazioni anti-radiodisturbi mento di disturbo recio elementi spegniarco (ad esempio diodi, varistori, proco.
elementi RC).
Montare separatamente i componenti di potenza e
quelli di comando.
54
Riduzione dell'accoppiamento di disturbo reciproco.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Effettuare la messa a terra dell'armadio elettrico,
Riduzione delle emisdegli sportelli e della piastra di montaggio utilizsioni
zando nastri di massa o cavetti di terra con sezione
maggiore di 10 mm2 (AWG 6).
LXM32C
5 Progettazione
Conduttori schermati
Provvedimenti CEM
Target
Applicare le schermature dei cavi in modo piatto e
utilizzare nastri e fascette per cavi di massa.
Riduzione delle emissioni
Collegamento della schermatura di tutti i conduttori Riduzione delle emisschermati con la piastra di montaggio all'uscita
sioni
dell'armadio elettrico mediante fascette per cavi su
una superficie piuttosto estesa.
Collegare a massa le schermature delle linee di
segnale su una superficie piuttosto estesa su
entrambi i lati oppure attraverso corpi di connettori
conduttivi.
Riduzione dei disturbi
sui cavi di segnale, riduzione delle emissioni.
Realizzare il collegamento a terra dello schermo dei Riduzione dei loop di
cavi di segnale analogici direttamente sull'apparec- massa dovuti a disturbi
chio (ingresso segnali), isolare lo schermo sull'altra a bassa frequenza.
estremità del cavo o collegarla a terra tramite un
condensatore, ad es. 10 nF.
Posa dei cavi
Utilizzo esclusivo di cavi per motore schermati
dotati di treccia in rame e di una copertura minima
dell'85%, collegamento a massa dello schermo su
una superficie piuttosto estesa su entrambi i lati.
Dissipazione mitrata
delle correnti di disturbo,
riduzione delle emissioni.
Provvedimenti CEM
Target
Riduzione dell'accoppiaNon posare le linee del bus di campo o le linee di
segnali nella stessa canalina che ospita conduttori mento di disturbo recidestinati a tensioni continue o alternate superiori a proco.
60 V. (i conduttori del bus di campo possono essere
posati nella stessa canalina delle linee di segnalazione e analogiche).
Raccomandazione: eseguire la posa dei conduttori
in canaline separate distanti tra loro almeno 20 cm.
Il cavo deve risultare quanto più corto possibile. Non Ridurre gli accoppiamontare doppini superflui, contenere la distanza del menti di disturbo capacicavo posato tra il punto centrale di terra nell'arma- tivi e induttivi.
dio elettrico e l'attacco a terra esterno.
Impiego di conduttori di collegamento equipotenziale sugli impianti
– installati su vasta superficie
– con tensioni di alimentazione differenti
– collegati con una rete estesa anche all'esterno
Riduzione della corrente sulla schermatura
del cavo, riduzione delle
emissioni.
Impiego di conduttori di collegamento equipotenziale a fili sottili.
Deviazione di correnti di
disturbo ad alta frequenza.
Se il motore e la macchina non sono uniti con colle- Riduzione delle emisgamento conduttore, ad es. con una flangia isolata sioni, aumento
o collegamenti non piatti, il motore deve essere
dell'immunità.
messo a terra con un cavetto di terra > 10 mm2
(AWG 6) o nastro di massa.
0198441113763, V1.02, 12.2009
Utilizzare twisted-pair per i segnali 24 Vdc.
Servoamplificatore AC
Riduzione dei disturbi
sui cavi di segnale, riduzione delle emissioni.
55
5 Progettazione
Alimentazione di tensione
LXM32C
Provvedimenti CEM
Target
Collegare il prodotto a una rete elettrica con centro Permettere il funzionaneutro a terra.
mento del filtro di rete.
Collegamento di protezione se c'è il rischio di sovra- Riduzione del rischio di
tensioni.
danni causati da sovratensioni.
Cavo motore e cavo encoder
Dal punto di vista della compatibilità elettromagnetica, i cavi del motore
e dell'encoder sono particolarmente critici. Utilizzare esclusivamente
cavi preconfezionati (vedere il capitolo 12 "Accessori e parti di ricambio") o aventi le caratteristiche prescritte (vedere il capitolo 5.2 "Cavi" a
pagina 58) e rispettare le seguenti esigenze CEM.
Provvedimenti CEM
Target
Non montare elementi di comando nel cavo motore Riduzione degli accopo nel cavo encoder.
piamenti di disturbo.
Eseguire la posa del cavo motore ad almeno 20 cm Riduzione dell'accoppiadi distanza dal cavo di segnale o inserire delle
mento di disturbo recilamiere di schermatura tra cavo motore e il cavo di proco.
segnale.
In presenza di cavi molto lunghi, utilizzare conduttori di collegamento equipotenziale.
Riduzione della corrente sulla schermatura
del cavo.
Posare il cavo motore e il cavo encoder senza punti Riduzione dell'irradiadi sezionamento. 1)
zione di radiodisturbi.
1) Se per l'installazione si rende necessario sezionare il cavo, in corrispondenza del
punto di sezionamento i cavi devono essere collegati ricorrendo a opportune
schermature e involucri metallici
Il rispetto dei valori limite indicato presuppone che sia stata eseguita
correttamente l'installazione a norma CEM. A seconda del tipo di applicazione è possibile ottenere risultati migliori con l'adozione delle seguenti misure:
Provvedimenti CEM
Target
Collegamento a monte di induttanze di rete
Soppressione delle
armoniche di rete,
aumento della durata di
vita del prodotto.
Collegamento a monte di filtri di rete esterni
Miglioramento dei valori
limite CEM.
Installazione particolarmente idonea a garantire la
compatibilità elettromagnetica, ad es. in armadio
elettrico chiuso con un'attenuazione di 15 dB dei
disturbi irradiati.
Miglioramento dei valori
limite CEM.
0198441113763, V1.02, 12.2009
Ulteriori misure per migliorare la
CEM
56
Servoamplificatore AC
LXM32C
5 Progettazione
Armadio elettrico
Filtro di rete (opzione)
Ingressi/Uscite digitali
Punto centrale
di messa a terra
Macchina
L1
L2
L3
Motore
(messa a terra
su macchina)
Encoder 1
M~
0198441113763, V1.02, 12.2009
Motore
Illustrazione 5.1
Servoamplificatore AC
Misure CEM
57
5 Progettazione
5.2
LXM32C
Cavi
Idoneità dei cavi
Collegamento degli schermi
Conduttori di compensazione del
potenziale
I cavi non devono essere ritorti, allungati, schiacciati o piegati ad angolo
vivo. Utilizzare sempre cavi conformi alle specifiche. Accertarsi che i
cavi siano idonei p.es. per:
•
catene portacavi
•
intervallo di temperatura
•
resistenza chimica
•
posa all'aperto
•
posa sotterranea
Per collegare gli schermi esistono le seguenti possibilità:
•
Cavo motore: lo schermo del cavo motore viene fissato al morsetto
schermato posto sotto all'apparecchio
•
Schermo del cavo analogico e dei cavi I/O a CN6.1 Pin 5
•
Altri cavi: gli schermi vengono allacciati in basso al collegamento
schermo dell'apparecchio
•
Alternativa: collegamento schermatura p.es. tramite morsetto
schermato e guida.
La differenza di potenziale può causare il passaggio di correnti eccessivamente elevate sulle schermature dei cavi. Per ridurre l'intensità della
corrente utilizzare condutttori di compensazione del potenziale.
Il conduttore di compensazione del potenziale deve essere dimensionato in funzione della corrente di compensazione massima. Di norma
per i conduttori sono state adottate le seguenti sezioni:
Passacavo
•
16 mm2 (AWG 4) per conduttori di compensazione del potenziale
fino a 200 m di lunghezza
•
20 mm2 (AWG 4) per conduttori di compensazione del potenziale di
lunghezza superiore a 200 m
Sopra e sotto all'apparecchio è presente un passacavo. Il passacavo
non funge da scarico della trazione dei cavi. Il passacavo presente sotto
all'apparecchio può essere utilizzato come collegamento schermo.
0198441113763, V1.02, 12.2009
NOTA: il passacavo superiore non è un collegamento schermo.
58
Servoamplificatore AC
LXM32C
5.2.1
5 Progettazione
Panoramica generale dei cavi necessari
Le caratteristiche dei cavi necessari sono illustrate in questa panoramica generale. Per minimizzare gli errori di cablaggio, utilizzare solo
cavi preconfezionati. I cavi preconfezionati sono reperibili nel capitolo 12
"Accessori e parti di ricambio" a pagina 377. Se il prodotto viene utilizzato ai sensi della norma UL 508C, devono essere soddisfatte le condizioni specificate nel capitolo 3.4 "Condizioni per la UL 508C" a pagina
48.
Lunghezza
max. [m]
Sezione min. [mm2]
(AWG)
Alimentazione di controllo
−
0,75 (AWG 18)
Funzione di sicurezza
STO 1)
−
Alimentazione stadio finale −
necessario
1)
necessario
− 2)
− 4)
necessario
Resistenza di frenatura est. 3
come per alimentazione
stadio finale
necessario
Encoder motore
100
6*0,14 mm2 e 2*0,34 mm2 necessario
(6*AWG 24 e 2*AWG 20)
necessario
necessario
Segnali A/B
100
0,25 (AWG 22)
necessario
necessario
necessario
Segnali PULSE / DIR
100
0,14 (AWG 24)
necessario
necessario
necessario
Segnali CW/CCW
100
0,14 (AWG 24)
necessario
necessario
necessario
ESIM
100
0,14 (AWG 24)
necessario
necessario
necessario
necessario 5)
necessario
necessario
Fasi motore
− 3)
0,75 (AWG 18)
schermato,
Twisted pair PELV
entrambe le
estremità collegate a massa
Ingressi analogici
10
0,14 (AWG 24)
Ingressi/uscite digitali
30
0,14 (AWG 24)
PC, interfaccia di messa in 20
servizio
0,14 (AWG 24)
necessario
necessario
necessario
necessario
1) Osservare le norme di posa (posa protetta), vedere pagina 74.
2) vedere 6.2.8 "Connessione dell'alimentazione stadio finale (CN1)"
3) La lunghezza dipende dai valori limite prescritti per errori condotti dall'alimentazione.
4) vedere 6.2.4 "Connessione delle fasi motore (CN10, motore)"
5) Realizzare la messa a terra della schermatura dei conduttori di segnali analogici direttamente sull'apparecchio (ingresso
segnali). Isolare la schermatura sull'altra estremità del cavo o in caso di interferenze collegarla a terra tramite un condensatore
(p.es. 10nF).
0198441113763, V1.02, 12.2009
Tabella 5.1 Specifiche dei cavi
Servoamplificatore AC
59
5 Progettazione
Cavo motore e cavo encoder
LXM32C
Cavi motore
Style 20234
Cavo encoder
Style 20963
Tensione ammessa cavo motore
[Vac]
600 (UL e CSA)
intervallo di temperatura
[°C]
-40 ... +90 (posa fissa)
-20 ... +80 (posa mobile)
Raggio minimo di curvatura
4 volte il diametro (posa fissa)
7,5 volte il diametro (posa mobile)
Guaina
PUR resistente all'olio
Schermatura
Treccia schermante
Copertura della treccia schermante
[%]
≥85
Tabella 5.2 Dati dei cavi motore e cavi encoder offerti come accessori
0198441113763, V1.02, 12.2009
Il cavo motore e il cavo encoder sono di tipo idoneo per catene portacavi
e sono disponibili in diverse lunghezze. I modelli offerti come accessori
sono reperibili a pagina 377.
60
Servoamplificatore AC
LXM32C
5.3
5 Progettazione
Dispositivo di sicurezza per correnti disperse
@ AVVERTENZA
QUESTO PRODOTTO PUÒ PROVOCARE LA PRESENZA DI UNA CORRENTE CONTINUA NEL CONDUTTORE DI PROTEZIONE
Se si utilizza un dispositivo di sicurezza per correnti disperse (interruttore automatico FI, RCD), occorre rispettare determinate condizioni.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
Condizioni per l'impiego di un
interruttore differenziale
Se le norme di installazione prescrivono una protezione per il contatto
diretto o indiretto collegata a monte da realizzarsi con un interruttore differenziale (interruttore automatico FI, RCD) o con un dispositivo di monitoraggio della corrente di dispersione (RCM), sugli azionamenti
monofase con collegamento tra N e L è possibile utilizzare un interruttore differenziale di "tipo A". Negli altri casi deve essere utilizzato un dispositivo di "tipo B".
Osservare quanto segue:
•
Filtraggio delle correnti ad alta frequenza.
•
Ritardo contro un'attivazione causata da eventuali capacità caricate
durante l'inserimento. Gli interruttori differenziali per 30 mA hanno
raramente un ritardo. Scegliere quindi un interruttore differenziale
resistente a un'attivazione involontaria (ad es. con immunità superiore).
Utilizzare interruttori differenziali che rispondono ai seguenti requisiti:
•
per apparecchi monofase, tipo A: interruttori differenziali della serie
s.i (super-immunizzati, Schneider Electric).
•
per apparecchi trifase, tipo B: interruttori differenziali selettivi con
omologazione per convertitore statico di frequenza.
Con l'impiego di dispositivi di sicurezza per correnti disperse, osservare
le correnti di dispersione delle utenze collegate.
5.4
Esercizio in rete IT
L'apparecchio è previsto per funzionare in una rete TT/TN. L'apparecchio non può essere utilizzato in una rete IT.
Un trasformatore collegato a terra sul lato uscita trasforma una rete IT in
una rete TT/TN. L'apparecchio può essere collegato a questa rete.
0198441113763, V1.02, 12.2009
Le architetture di rete ammesse sono riportate nel capitolo 3.3.1 "Stadio
finale" a pagina 25.
Servoamplificatore AC
61
5 Progettazione
5.5
LXM32C
Collegamento in parallelo del bus DC
@ AVVERTENZA
DANNI IRREPARABILI A PARTI DELL'IMPIANTO E PERDITA DI CONTROLLO
Se il collegamento in parallelo del bus DC non viene eseguito correttamente, i sistemi di azionamento possono danneggiarsi irreparabilmente subito o con un certo ritardo.
•
Osservare i requisiti per l'uso del collegamento in parallelo del
bus DC.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
In alcune applicazioni, con il collegamento in parallelo di più apparecchi
al bus DC è possibile migliorare l'efficienza energetica. Senza un collegamento al bus DC, l'energia in eccesso rialimentata che si forma durante la decelerazione del motore viene trasformata in calore. Il
collegamento al bus DC di più azionamenti permette invece uno scambio di energia. L'energia rialimentata può infatti essere utilizzata per
l'azionamento di ulteriori motori. Nel funzionamento aciclico, durante il
quale un motore decelera mentre un altro richiede contemporaneamente energia, l'energia rialimentata può essere sfruttata un modo efficace.
Requisiti di impiego
I requisiti e i valori limite per il collegamento in parallelo di più LXM32 al
bus DC sono consultabili su Internet come indicazione d'uso
MNA01D001.
0198441113763, V1.02, 12.2009
Funzionamento
62
Servoamplificatore AC
LXM32C
5.6
5 Progettazione
Induttanza di rete
Induttanza di rete
Le seguenti condizioni di esercizio rendono necessario l'impiego di
un'induttanza di rete:
•
in caso di collegamento a una rete di alimentazione a bassa impedenza (corrente di cortocircuito massima della rete superiore al
valore indicato nel capitolo 3 "Dati tecnici" a pagina 25)
•
se la potenza nominale dell'azionamento senza induttanza di rete è
troppo bassa
•
quando l'azionamento deve soddisfare particolari requisiti in termini
di durata di vita (ad es funzionamento continuo 24h su 24)
•
in caso di collegamento a reti con impianti di compensazione della
corrente reattiva
•
per migliorare il fattore di potenza sull'ingresso della rete e per
ridurre le armoniche di rete
Ad un'induttanza di rete è possibile collegare più apparecchi. Osservare
la corrente di taratura della bobina.
Nelle reti di alimentazione a bassa impedenza si formano alte armoniche di corrente all'ingresso della rete, che sollecitano fortemente i condensatori interni del bus DC. Il carico dei condensatori del bus DC
influisce notevolmente sulla durata di vita dell'apparecchio.
Pagina
Dati tecnici induttanza di rete (accessori)
47
Montaggio induttanza di rete (accessori)
85
Installazione elettrica induttanza di rete (accessori)
102
Dati di ordinazione induttanza di rete (accessori)
383
0198441113763, V1.02, 12.2009
Ulteriori informazioni sul tema
Servoamplificatore AC
63
5 Progettazione
5.7
LXM32C
Filtri di rete
Valori limite
Se in fase di installazione vengono rispettate le misure CEM descritte
nel presente manuale, il prodotto risponde ai requisiti CEM secondo la
norma IEC 61800-3.
Se la combinazione scelta non prevede la categoria C1, occorre rispettare la seguente nota:
@ AVVERTENZA
INTERFERENZE AD ALTA FREQUENZA
In ambiente residenziale questo prodotto può causare interferenze ad
alta frequenza che possono rendere necessaria l'adozione di soppressori di disturbi.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
La categoria dell'apparecchio è riportata nei dati tecnici a pagina 45.
A seconda del tipo di apparecchio e di applicazione, nonché del tipo di
installazione, è possibile ottenere valori migliori, ad esempio optando
per il montaggio in un armadio elettrico chiuso con smorzamento di almeno 15db.
Gli azionamenti dispongono di un filtro di rete integrato.
In presenza di lunghi cavi motore, è necessario un filtro di rete esterno
aggiuntivo. Durante l'impiego di filtri di rete esterni, accertarsi che vengano rispettate le norme di compatibilità elettromagnetica.
Se vengono utilizzati i filtri di rete esterni offerti nel capitolo 12.12 "Filtri
di rete esterni", vengono rispettati i valori limite specificati nel capitolo
3.3.7 "Filtro di rete esterno (accessorio)" a pagina 46.
Pagina
Dati tecnici filtri di rete esterni (accessori)
46
Montaggio filtro di rete esterno (accessori)
85
Installazione elettrica filtri di rete esterni (accessori)
102
Dati di ordinazione filtri di rete esterni (accessori)
384
0198441113763, V1.02, 12.2009
Ulteriori informazioni sul tema
64
Servoamplificatore AC
LXM32C
5.7.1
5 Progettazione
Disattivazione dei condensatori Y
Il collegamento a terra dei condensatori Y interni può essere interrotto
(disattivazione). Normalmente non è necessario disattivare il collegamento a terra dei condensatori Y.
1a
1b
Illustrazione 5.2
Vite per l'attivazione e la disattivazione dei condensatori Y
interni
Svitando la vite, i condensatori Y vengono disattivati, vedere Illustrazione 5.2. Conservare con cura questa vite, in modo da poter riattivare
i condensatori Y quando occorre.
0198441113763, V1.02, 12.2009
NOTA: disattivando i condensatori Y i valori limite CEM indicati perdono
validità.
Servoamplificatore AC
65
5 Progettazione
5.8
LXM32C
Dimensionamento della resistenza di frenatura
@ PERICOLO
PERICOLO DI INCENDIO CAUSATO DA UN MOTORE A CONTROLLO
INDIPENDENTE
Se il controllo indipendente del motore alimenta correnti troppo elevate verso l'azionamento, quest'ultimo si può surriscaldare e incendiare.
•
Accertarsi che dopo un messaggio d'errore della classe di errore
3 o 4 venga interrotta l'alimentazione di energia al motore con
controllo indipendente.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
MOTORE NON FRENATO
Una resistenza di frenatura insufficiente produce sovratensioni sul
bus DC e determina il disinserimento dello stadio finale. La conseguenza è che il motore non viene più frenato attivamente.
•
Verificare il dimensionamento della resistenza di frenatura.
•
Verificare l'impostazione dei parametri della resistenza di frenatura.
•
Con dei funzionamenti di prova, controllare il valore I2t nelle condizioni più critiche. Con un valore I2t del 100%, l'apparecchio si
disinserisce.
•
Durante i calcoli e i test, tenere presente che in caso di una tensione di rete più alta, nei condensatori del bus DC può essere
immagazzinata meno energia di frenata.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
@ AVVERTENZA
SUPERFICI MOLTO CALDE
•
Evitare il contatto diretto con la resistenza di frenatura.
•
Non collocare componenti infiammabili o sensibili al calore nelle
immediate vicinanze della resistenza di frenatura.
•
Provvedere ad un'adeguata asportazione del calore.
•
Nei casi più critici, controllare la temperatura della resistenza di
frenatura con un ciclo di funzionamento di prova.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
66
Servoamplificatore AC
0198441113763, V1.02, 12.2009
A seconda delle condizioni di esercizio, la resistenza di frenatura può
raggiungere temperature superiori ai 250°C (482°F).
LXM32C
5 Progettazione
Le resistenze di frenatura sono necessarie per le applicazioni dinamiche. Durante la decelerazione, all'interno del motore l'energia cinetica
viene trasformata in energia elettrica. L'energia elettrica aumenta la tensione del bus DC. La resistenza di frenatura viene attivata al superamento di un valore soglia predefinito. All'interno della resistenza di
frenatura l'energia elettrica viene trasformata in calore. Se durante la
frenata è richiesta una dinamica elevata, la resistenza di frenatura deve
essere ben adeguata all'impianto.
Ulteriori informazioni sul tema
Pagina
Dati tecnici 3.3.5 "Resistenza di frenatura"
42
Montaggio "Resistenza di frenatura esterna" (accessori)
85
Installazione elettrica: 6.2.7 "Connessione resistenza di frenatura (CN8, Braking Resistor)" (accessori)
99
Impostazione dei parametri per la resistenza di frenatura
152
Dati per l'ordinazione di resistenze di frenatura esterne (acces- 377
sori)
5.8.1
Resistenza di frenatura interna
0198441113763, V1.02, 12.2009
Nell'azionamento è integrata una resistenza di frenatura che ha il compito di assorbire l'energia di frenata. Alla consegna, la resistenza di frenatura interna è attivata.
Servoamplificatore AC
67
5 Progettazione
5.8.2
LXM32C
Resistenza di frenatura esterna
L'impiego di una resistenza di frenatura esterna si rende necessario in
quelle applicazioni che prevedono forti frenate del motore e di conseguenza una quantità di energia in eccesso che la resistenza di frenatura
interna non è più in grado di assorbire.
Monitoraggi
L'apparecchio tiene sotto controllo la potenza della resistenza di frenatura. Il carico della resistenza di frenatura può essere letto.
La connessione della resistenza di frenatura esterna è protetto contro
corto circuiti. In caso di guasto a terra, non è presente alcuna protezione.
Scelta della resistenza di frenatura
esterna
Le dimensioni di una resistenza di frenatura esterna vanno determinate
in funzione della potenza massima e dalla potenza continua che la resistenza può sopportare.
Il valore di resistenza R [Ω] è il risultato della potenza massima necessaria e della tensione del bus DC.
R = U2 / Pmax
Illustrazione 5.3
U:
Soglia di scatto [V]
Pmax :
Potenza massima richiesta [W]
R:
Resistenza [Ohm]
Calcolo della resistenza R di una resistenza di frenatura
esterna
Se si collegano 2 o più resistenze di frenatura, attenersi ai seguenti criteri:
•
Le resistenze di frenatura devono essere collegate in parallelo o in
serie, in modo da ottenere il valore di resistenza richiesto. Collegare
in parallelo solo valori di resistenza identici, in modo da caricare
uniformemente tutte le resistenze di frenatura.
•
Il valore di resistenza totale di tutte le resistenza di frenatura
esterne non deve oltrepassare una determinata soglia inferiore,
consultare il capitolo 3.3.5 "Resistenza di frenatura".
•
È necessario calcolare la potenza continua della rete di resistenze
di frenature collegate insieme. Il risultato deve essere uguale o
superiore alla potenza continua effettivamente necessaria.
Utilizzare esclusivamente resistenze omologate come resistenze di frenatura. Le resistenze di frenatura idonee sono disponibili come accessori a pagina 382.
La commutazione tra resistenza interna ed esterna avviene attraverso
un parametro dedicato. All'atto della messa in servizio, controllare l'efficienza della resistenza di frenatura in condizioni realistiche, vedere a
pagina 135.
In un ambiente con grado di protezione adeguato, le resistenze di frenatura IP65 possono essere montate anche all’esterno dell'armadio
elettrico.
La resistenza di frenatura è corredata da una scheda informativa contenente ulteriori indicazioni sulle modalità di montaggio.
Le avvertenze relative al funzionamento e all'installazione elettrica sono
riportate a pagina 66.
68
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Connessione della resistenza di
frenatura
LXM32C
5.8.3
5 Progettazione
Sussidio di dimensionamento
Per il dimensionamento, si calcolano le componenti che concorrono
all'assorbimento dell'energia di frenata.
Una resistenza di frenatura esterna è necessaria quando l'energia cinetica da assorbire è superiore al totale delle componenti interne, inclusa
la resistenza di frenatura interna.
Assorbimento interno di energia
L'energia di frenata viene assorbita internamente attraverso i seguenti
meccanismi:
•
Condensatore del bus DC Evar
•
Resistenza di frenatura interna EI
•
Perdite elettriche dell'azionamento Eel
•
Perdite meccaniche dell'azionamento Emech
L'energia Evar dipende dal quadrato della differenza tra la tensione
prima della operazione di frenata e la soglia d'intervento.
La tensione prima della operazione di frenata dipende dalla tensione di
rete. L'energia assorbita dai condensatori del bus DC raggiunge il suo livello più basso quando la tensione di rete è al valore massimo. Per il calcolo, utilizzare i valori validi per la tensione di rete più alta.
Resistenza di frenatura interna
L'energia assorbita dalla resistenza di frenatura interna dipende da due
parametri.
•
La potenza continua PPR indica quanta energia può essere dissipata in modo permanente senza sovraccaricare la resistenza di frenatura.
•
La massima energia ECR definisce il limite di massima potenza dissipabile per breve tempo.
Se la potenza continua viene superata per un determinato arco di
tempo, la resistenza di frenatura deve restare senza carico per un periodo di tempo altrettanto lungo.
Le grandezze caratteristiche PPR ed ECR della resistenza di frenatura interna sono riportate a pagina 42.
Le perdite elettriche Eel possono essere stimate sulla base della potenza massima dell'azionamento. Con un rendimento tipico del 90%, la
potenza dissipata massima ammonta a circa il 10% della potenza massima. Se durante la frenata la corrente è più bassa, la potenza dissipata
risulta corrispondentemente più bassa.
Perdite meccaniche Emech
Le perdite meccaniche derivano dallo smorzamento causato dall'attrito
che si manifesta durante il funzionamento dell'impianto. Le perdite meccaniche sono trascurabili se l'impianto senza azionamento richiede per
arrestarsi un tempo molto più lungo rispetto a quello in cui l'impianto
deve essere frenato. Le perdite meccaniche possono essere calcolate
dalla coppia del carico e dal numero di giri a partire dal quale il motore
deve essere arrestato.
0198441113763, V1.02, 12.2009
Perdite elettriche Eel
Servoamplificatore AC
69
5 Progettazione
LXM32C
Esempio
Frenata di un motore rotativo con i seguenti dati:
•
Numero di giri iniziale: n = 4000 min-1
•
Momento d'inerzia del rotore: JR = 4 kgcm2
•
Inerzia del carico: JL = 6 kgcm2
L'energia da dissipare si ricava da:
EB = 1/2 * J * (2*π*n * 1/60)2
pari a 88 Ws
Le perdite elettriche e meccaniche vengono trascurate.
Nei condensatori del bus DC vengono in questo caso assorbiti 23 Ws (il
valore dipende dal tipo di apparecchio, consultare il capitolo 3 "Dati tecnici").
La resistenza di frenatura interna deve dissipare i restanti 65 Ws. Essa
è in grado di assorbire un impulso di 80 Ws. La resistenza di frenatura
interna è sufficiente se il carico deve essere frenato una sola volta.
Se l'operazione di frenata si ripete ciclicamente, è necessario tenere
conto della potenza continua. Se il tempo di ciclo è più lungo del rapporto tra l'energia da assorbire EB e la potenza continua PPR, la resistenza di frenatura interna è sufficiente. Se la frenata avviene con
maggiore frequenza, la resistenza di frenatura interna non è più sufficiente.
Nell'esempio, il rapporto EB/PPR è pari a 1,3 s. Con un tempo di ciclo più
breve, è necessaria una resistenza di frenatura esterna.
Dimensionamento della resistenza
di frenatura esterna
n3
D1
n2
D2
n1
D3
t
0
n4
t1 t2 t3
t4
t5 t6 t7 t8 t9
t10
t11 t12
TC
M3
M2
M1
t
M4
M5
Illustrazione 5.4
70
Curve caratteristiche per il dimensionamento della resistenza di frenatura
Servoamplificatore AC
0198441113763, V1.02, 12.2009
0
LXM32C
5 Progettazione
Queste due curve caratteristiche vengono utilizzate anche per il dimensionamento del motore. I segmenti delle curve caratteristiche in cui il
motore frena, e che devono quindi essere considerati ai fini del dimensionamento, sono contrassegnati da (Di).
Calcolo dell'energia con decelerazione costante:
A tal fine deve essere noto il momento d'inerzia totale (Jt).
Per Jt vale quanto segue:
Jt = Jm + Jc
Jm: momento d'inerzia del motore con o senza freno
Jc: inerzia del carico
L'energia per ogni segmento di decelerazione si calcola come segue:
Ei =
2πni
1
1
J ωi2 = Jt
2 t
2
2
60
Risultato per i segmenti (D1) … (D3):
E1 =
1
J
2 t
2π(n3 - n1 )
E2 =
1
J
2 t
2πn1
2
60
2
60
Unità: Ei in Ws (Watt secondo), Jt in kgm2, ω in rad e ni in min-1.
L'assorbimento di energia Evar degli apparecchi (senza tenere conto di
una resistenza di frenatura interna o esterna) è riportato nei dati tecnici.
Nell'ulteriore calcolo occorre considerare solo i segmenti Di, la cui energia Ei supera quella assorbita dagli apparecchi (vedere il capitolo 3.3
"Dati elettrici"). Queste energie supplementari EDi devono essere dissipate dalla resistenza di frenatura (interna o esterna).
La formula di calcolo di EDi è la seguente:
EDi = Ei - Evar (in Ws)
La potenza continua Pc deve essere calcolata per ciascun ciclo macchina:
0198441113763, V1.02, 12.2009
Pc =
ΣE
Di
Tempo di ciclo
Unità: Pc in [W], EDi in [Ws] e tempo di ciclo T in [s]
Servoamplificatore AC
71
5 Progettazione
LXM32C
La scelta va operata in due fasi:
•
L'energia massima durante un'operazione di frenata deve essere
inferiore all'energia massima che la resistenza di frenatura è in
grado di assorbire: (EDi)<(ECr). Inoltre, non è ammesso superare la
potenza continua della resistenza di frenatura interna: (PC)<(PPr).
Se queste condizioni vengono soddisfatte, la resistenza di frenatura
interna è sufficiente.
•
Se una delle due condizioni non viene soddisfatta, è necessario utilizzare una resistenza di frenatura esterna. La resistenza di frenatura deve essere scelta in modo tale da soddisfare le condizioni. Il
valore della resistenza di frenatura deve essere compreso tra il
valore di resistenza minimo e quello massimo, poiché in caso contrario il carico non verrebbe frenato in modo sicuro oppure il prodotto potrebbe subire danni irreparabili.
0198441113763, V1.02, 12.2009
I dati per l'ordinazione delle resistenze di frenatura esterne sono riportati nel capitolo Accessori a pagina 383.
72
Servoamplificatore AC
LXM32C
5.9
5 Progettazione
Funzione di sicurezza STO ("Safe Torque Off")
I principi per l'applicazione della norma IEC 61508 sono reperibili a pagina 51.
5.9.1
Definizioni
Funzione di sicurezza STO
(IEC 61800-5-2)
La funzione di sicurezza STO ("Safe Torque Off") disinserisce in modo
sicuro la coppia motore. Non è necessario interrompere la tensione di
alimentazione. La funzione non prevede il monitoraggio dell'arresto del
motore.
Categoria di arresto 1 (IEC 602041)
Arresto mediante disinserimento immediato dell'alimentazione degli
elementi di azionamento della macchina (arresto non controllato).
Categoria di arresto 1 (IEC 602041)
Arresto controllato realizzato senza interrompere l'alimentazione degli
elementi di azionamento macchina. L'energia viene interrotta soltanto
ad arresto avvenuto.
5.9.2
Funzione
Con la funzione di sicurezza STO integrata nel prodotto è possibile realizzare un "ARRESTO DI EMERGENZA" (IEC 60204-1) per la categoria di arresto 0. Con un modulo relè di sicurezza ARRESTO DI
EMERGENZA supplementare omologato è possibile realizzare anche
la categoria di arresto 1.
Funzionamento
La funzione di sicurezza STO viene realizzata con 2 ingressi ridondanti.
Per ottenere due canali, i due ingressi devono essere collegati separatamente.
La commutazione dei due ingressi deve avvenire contemporaneamente
(offset di tempo <1s). Lo stadio finale si disinserisce e viene visualizzato
un messaggio d'errore. Il motore non è in grado di generare coppia e si
arresta senza intervento del freno. Il riavvio è consentito dopo aver resettato la segnalazione d'errore con un "Fault reset".
0198441113763, V1.02, 12.2009
Anche se viene disinserito solo uno degli ingressi o se l'offset di tempo
è troppo alto, lo stadio finale viene disattivato e viene visualizzata una
segnalazione d'errore. Questo messaggio d'errore può essere resettato
solo mediante il disinserimento.
Servoamplificatore AC
73
5 Progettazione
5.9.3
LXM32C
Requisiti per l'uso della funzione di sicurezza
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI IMPIEGO ERRATO
La funzione di sicurezza STO (Safe Torque Off) non provoca una separazione elettrica. Il bus DC continua ad essere sotto tensione.
•
Per ottenere la libertà di tensione, disinserire la tensione di rete
con un interruttore adeguato.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
PERDITA DELLA FUNZIONE DI SICUREZZA
In caso di uso errato è possibile perdere la funzione di sicurezza.
•
Rispettare i requisiti per l'uso della funzione di sicurezza.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
Arresto di categoria 0
Con un arresto di categoria 0 il motore si ferma in modo incontrollato. Se
l'accesso alla macchina in fase di arresto costituisce pericolo (risultato
dell'analisi dei pericoli e dei rischi), devono essere adottate adeguate
misure di sicurezza.
Arresto di categoria 1
In caso di arresto di categoria 1 deve essere attivato un arresto controllato. L'arresto controllato non viene monitorato dal sistema di azionamento. L'arresto controllato non è possibile in caso di caduta di rete o di
errore. Il disinserimento definitivo del motore si ottiene disinserendo i
due ingressi della funzione di sicurezza STO. Il disinserimento viene generalmente governato da un comune modulo relè di sicurezza ARRESTO DI EMERGENZA con ritardo sicuro.
Comportamento del freno d'arresto
L'attivazione della funzione di sicurezza STO annulla il ritardo dei motori
muniti di freno d'arresto. Il motore non può generare una coppia di mantenimento per coprire il tempo necessario per l'intervento del freno d'arresto. Verificare se debbano essere adottate misure supplementari; ad
esempio nel caso degli assi verticali tale comportamento può provocare
l'abbassamento del carico.
Assi verticali, forze esterne
Quando il motore è sottoposto a forze esterne (assi verticali) che possono provocare un movimento indesiderato pericoloso, ad esempio per
effetto della forza di gravità, il motore non può essere messo in funzione
senza aver adottato misure atte ad evitarne la caduta.
Riavvio imprevisto
Per garantire la protezione contro il riavvio imprevisto del motore al ritorno della tensione (p.es. in seguito ad una caduta di rete), è necessario che il parametro IO_AutoEnable sia impostato su "off". Accertarsi
che nessun controllore supervisore possa provocare il riavvio.
74
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Gli ingressi della funzione di sicurezza STO (ingressi STO_A e STO_B)
sono fissi con tipo di logica 1.
LXM32C
5 Progettazione
Grado di protezione per l'uso della
funzione di sicurezza
Accertarsi che all'interno del prodotto non si possano depositare tipologie d'imbrattamento conduttive (grado d'inquinamento 2). L'imbrattamento conduttivo può rendere inefficaci le funzioni di sicurezza.
Posa protetta
Se i segnali rilevanti per la sicurezza possono essere soggetti a cortocircuiti e a cortocircuiti incrociati, e se non sono presenti apparecchi collegati a monte in grado di rilevarli, è necessario realizzare una posa
protetta ai sensi della norma ISO 13849-2.
In caso contrario, i due segnali (entrambi i canali) di una funzione di sicurezza possono essere collegati insieme dalla tensione parassita che
si forma quando si danneggia il cavo. Se i due canali vengono collegati
insieme da una tensione parassita, la funzione di sicurezza non è più attiva.
Dati per il piano di manutenzione e i
calcoli relativi alla sicurezza
Per il piano di manutenzione e i calcoli relativi alla sicurezza fare riferimento ai seguenti dati della funzione di sicurezza STO:
Durata di vita (IEC 61508)
Anni
20
SFF (IEC 61508)
Safe Failure Fraction
[%]
80
1
HFT (IEC 61508)
Hardware Fault Tolerance
Tipo sottosistema A
SIL
IEC 61508
IEC 62061
PFH (IEC 61508)
Probability of Dangerous Hardware Failure per Hour
SIL3
SILCL3
[1/h] 1*10-9
(FIT) (1)
PL (ISO 13849-1)
Performance Level
Analisi dei pericoli e dei rischi
e (categoria 3)
Tempo medio al guastod
(ISO 13849-1)
Mean Time to Dangerous Failure
Anni
1400
DC (ISO 13849-1)
Diagnostic Coverage
[%]
90
Il costruttore dell'impianto è tenuto ad eseguire un'analisi dei pericoli e
dei rischi su tutto il sistema. I risultati devono essere considerati per l'applicazione della funzione di sicurezza.
0198441113763, V1.02, 12.2009
Il cablaggio risultante dall'analisi può discostarsi dagli esempi di applicazione seguenti. È possibile che possano rendersi necessari componenti di sicurezza supplementari. I risultati dell'analisi dei pericoli e dei
rischi sono da considerarsi prioritari.
Servoamplificatore AC
75
5 Progettazione
5.9.4
LXM32C
Esempi di applicazione STO
Esempio categoria di arresto 0
Utilizzo senza modulo relè di sicurezza ARRESTO DI EMERGENZA,
categoria di arresto 0.
24V
Arresto di
emergenza
24V
ENABLE
Enable
FAULT RESET
Fault reset
M
3~
STO_A
STO_B
Illustrazione 5.5
Esempio categoria di arresto 0
Viene richiesto un ARRESTO DI EMERGENZA. La richiesta provoca
uno stop della categoria 0:
Lo stadio finale viene immediatamente disattivato dagli ingressi
STO_A e STO_B della funzione di sicurezza STO. Al motore non
può più essere fornita energia. Se a questo punto il motore non è
completamente fermo, si ferma in modo incontrollato (arresto non
controllato).
0198441113763, V1.02, 12.2009
•
76
Servoamplificatore AC
LXM32C
5 Progettazione
Esempio categoria di arresto 1
24V
Utilizzo con modulo relè di sicurezza ARRESTO DI EMERGENZA, categoria di arresto 1.
24V 24V 24V
24V
Preventa
XPS-AV
ENABLE
Enable
FAULT RESET
Y+
Fault reset
Y64
Y74
Y84
M
Halt
3~
ritardato
Arresto di
emergenza
37
47
57
03
13
23
S31
S21
S22
S32
A1
non
ritardato
STO_A
STO_B
38
48
58
04
14
24
S11
S12
S13
S14
A2
Illustrazione 5.6
Esempio di categoria di arresto 1 con modulo relè di sicurezza ARRESTO DI EMERGENZA esterno Preventa XPSAV
Viene richiesto un ARRESTO DI EMERGENZA. La richiesta provoca
uno stop della categoria 1:
•
Attraverso l'ingresso HALT viene immediatamente (senza ritardo)
avviata la funzione "Halt" (monocanale, non monitorata). Un movimento attivo viene decelerato secondo la rampa impostata.
•
Attraverso gli ingressi STO_A e STO_B della funzione di sicurezza
STO, lo stadio finale viene disattivato dopo il tempo di ritardo impostato nel modulo relè di sicurezza ARRESTO DI EMERGENZA. Al
motore non può più essere fornita energia. Se a questo punto il
motore non è ancora completamente fermo, si ferma in modo
incontrollato (arresto non controllato).
0198441113763, V1.02, 12.2009
NOTA: occorre rispettare la corrente minima e massima prescritte per le
uscite relè del modulo relè di sicurezza ARRESTO DI EMERGENZA.
Servoamplificatore AC
77
5 Progettazione
5.10
LXM32C
Tipo di logica
@ AVVERTENZA
FUNZIONAMENTO INDESIDERATO
Se si utilizza il tipo di logica 2, il guasto a terra di un segnale viene interpretato come stato ON.
•
Prestare particolare attenzione nel realizzare il cablaggio, in
modo da escludere a priori eventuali guasti a terra.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Gli ingressi e le uscite digitali di questo prodotto possono essere cablati
con tipo di logica 1 o con tipo di logica 2.
1
+24V
0V
Illustrazione 5.7
2
DQ_COM
+24V
DQ_COM
DQ0,DQ1,...
DQ0,DQ1,...
DI0,DI1,...
DI0,DI1,...
DI_COM
DI_COM
0V
Tipo di logica
Tipo di logica
Stato attivo
(1) Tipo di logica 1
L'uscita eroga corrente (Source)
La corrente scorre nell'ingresso
(2) Tipo di logica 2
L'uscita preleva corrente (Sink)
La corrente proviene dall'ingresso
Gli ingressi dei segnali sono protetti contro le inversioni di polarità, le
uscite sono resistenti ai corto circuiti. Gli ingressi e le uscite sono separati galvanicamente.
La definizione avviene con il cablaggio di DI_COM e DQ_COM, vedere Illustrazione 5.7. Il tipo di logica si ripercuote sul cablaggio e sul comando
dei sensori e deve pertanto essere scelta in fase di progettazione in funzione del campo di applicazione.
Gli ingressi della funzione di sicurezza STO (ingressi STO_A e STO_B)
sono fissi con tipo di logica 1.
0198441113763, V1.02, 12.2009
Caso eccezionale: funzione di
sicurezza STO
78
Servoamplificatore AC
LXM32C
5.11
5 Progettazione
Funzioni di monitoraggio
Le funzioni di monitoraggio presenti nel prodotto possono servire a proteggere l'impianto e a ridurre il rischio di funzionamento errato. Queste
funzioni di monitoraggio non devono essere utilizzate per proteggere il
personale.
Sono possibili le seguenti funzioni di monitoraggio:
Monitoraggio
Compito
Connessione dati
Reazione ad errore in caso di interruzione collegamento
Segnali di interruttori di finecorsa
Monitoraggio del campo di movimento ammesso
Errore d'inseguimento
Monitoraggio dello scostamento della posizione del motore rispetto al valore
di consegna di posizione
Sovraccarico del motore
Monitoraggio di valori di corrente eccessivi nelle fasi motore
Sovratensione e sottotensione
Monitoraggio di sovratensioni e sottotensioni dell'alimentazione di potenza
Sovratemperatura
Monitoraggio del surriscaldamento dell'apparecchio
Limite
I 2t
Limitazione della potenza in caso di sovraccarico per motore, corrente di
uscita, potenza di uscita e resistenza di frenatura
Commutazione
Controllo della plausibilità dell'accelerazione del motore e della coppia utile
Fasi della rete
Ricerca di fasi della rete mancanti
La descrizione delle funzioni di monitoraggio è riportata nel capitolo 8.5
"Funzioni per il monitoraggio dei segnali interni all'apparecchio".
5.12
Ingressi e uscite configurabili
@ AVVERTENZA
PERDITA DI CONTROLLO
L'uso degli interruttori di finecorsa può offrire un certo grado di protezione contro i pericoli (p.es. urto contro l'arresto meccanico dovuto a
valori di consegna non corretti).
•
Se possibile, utilizzare gli interruttori di finecorsa.
•
Controllare la corretta connessione degli interruttori di finecorsa.
•
Verificare la correttezza del montaggio degli interruttori di finecorsa. Gli interruttori di finecorsa devono essere montati ad una
distanza dall'arresto meccanico tale da garantire una sufficiente
corsa di decelerazione.
•
Per poter essere utilizzati, gli interruttori di finecorsa devono
essere omologati.
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Questo prodotto possiede ingressi e uscite che possono essere configurati. Questi ingressi e uscite hanno un'assegnazione standard predefinita in base al modo operativo. Questa assegnazione può essere
adattata alle necessità di impianto del cliente. Per maggiori informazioni
consultare il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Servoamplificatore AC
79
LXM32C
0198441113763, V1.02, 12.2009
5 Progettazione
80
Servoamplificatore AC
LXM32C
6
6 Installazione
Installazione
6
Prima dell'installazione meccanica e di quella elettrica è necessario effettuare una progettazione. Per le informazioni fondamentali vedere il
capitolo 5 "Progettazione" a pagina 53.
@ AVVERTENZA
PERDITA DI CONTROLLO
•
Nella fase di progettazione del sistema di comando il costruttore
dell'impianto deve tenere conto dei potenziali rischi di guasto del
circuito di comando e per determinate funzioni deve predisporre
gli strumenti con cui durante e dopo il guasto di un circuito di
comando sia possibile ripristinare le condizioni di sicurezza. Funzioni di comando critiche sono costituite ad esempio da: ARRESTO DI EMERGENZA, limitazione della posizione di fine corsa,
interruzione dell'alimentazione di tensione e riavvio.
•
Per le funzioni critiche devono essere predisposti circuiti di
comando separati o ridondanti.
•
Il comando dell'impianto può comprendere anche i sistemi di
comunicazione. Il costruttore dell'impianto deve tenere conto
delle conseguenze derivanti da ritardi o anomalie inattese nel
sistema di comunicazione.
•
Rispettare le norme antinfortunistiche nonché tutte le disposizioni
vigenti in materia di sicurezza. 1)
•
Tutti gli impianti in cui deve essere utilizzato il prodotto descritto
nel presente manuale prima dell'esercizio devono essere controllati singolarmente e sottoposti ad un'attenta verifica funzionale.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
0198441113763, V1.02, 12.2009
1) Per gli USA: vedi NEMA ICS 1.1 (edizione più recente), Safety Guidelines for the
Application, Installation, and Maintenance of Solid State Control nonché NEMA
ICS 7.1 (edizione più recente), Safety Standards for Construction and Guide for
Selection, Installation for Construction and Operation of Adjustable-Speed Drive
Systems.
Servoamplificatore AC
81
6 Installazione
6.1
LXM32C
Installazione meccanica
@ PERICOLO
PERICOLO DI SCOSSA ELETTRICA A CAUSA DI CORPI ESTRANEI O
DANNI
La presenza di corpi estranei che conducono corrente all'interno del
prodotto o un danneggiamento di quest'ultimo possono provocare deviazioni della tensione.
•
Non utilizzare prodotti danneggiati.
•
Impedire che corpi estranei, quali trucioli, viti o pezzi di filo metallico, possano penetrare all'interno del prodotto.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
PERDITA DELLA FUNZIONE DI SICUREZZA A CAUSA DI CORPI
ESTRANEI
La presenza di corpi estranei, polvere o liquidi conduttivi può mettere
fuori uso le funzioni di sicurezza.
•
Utilizzare una funzione di sicurezza esclusivamente se è garantita la protezione contro gli imbrattamenti conduttivi.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
@ ATTENZIONE
SUPERFICI MOLTO CALDE
A seconda delle condizioni di funzionamento, la superficie metallica
del prodotto può raggiungere temperature superiori a 100 °C
(212 °F).
•
Evitare il contatto con le parti metalliche.
•
Non collocare nelle immediate vicinanze componenti infiammabili
o sensibili al calore.
•
Osservare le precauzioni indicate per la dissipazione del calore.
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può avere come conseguenza lesioni fisiche o danni materiali.
82
Servoamplificatore AC
LXM32C
6.1.1
6 Installazione
Montaggio dell'apparecchio
Applicazione dell'adesivo con
istruzioni relative alla sicurezza
왘 Scegliere l'adesivo adatto al paese di destinazione.
Osservare le norme di sicurezza del paese di destinazione.
왘 Applicare l'adesivo sulla parte anteriore dell'apparecchio in modo
tale che sia ben visibile.
Armadio elettrico
L'armadio elettrico deve essere di dimensioni tali da consentire il montaggio al suo interno di tutti gli apparecchi e i componenti e il loro cablaggio a norma CEM.
Il sistema di ventilazione dell'armadio elettrico deve essere in grado di
dissipare il calore prodotto in esercizio da tutti gli apparecchi e i componenti montati all'interno dell'armadio.
Per la scelta della posizione dell'apparecchio all'interno dell'armadio
elettrico osservare le seguenti indicazioni:
•
Montare l'apparecchio in posizione verticale (±10°). Tale precauzione è necessaria per garantire il raffreddamento dell'apparecchio.
•
Rispettare le distanze di montaggio minime per consentire il raffreddamento necessario. Evitare accumuli di calore.
•
Non montare l'apparecchio in prossimità di fonti di calore.
•
Non montare l'apparecchio su materiali infiammabili.
•
Il flusso d'aria calda emesso da altri apparecchi e componenti non
deve provocare un ulteriore riscaldamento dell'aria di raffreddamento dell'apparecchio.
•
In caso di funzionamento al di sopra dei limiti di temperatura (sovratemperatura), l'azionamento si disinserisce per surriscaldamento.
•
Per il montaggio dei componenti (filtri di rete esterni, induttanze di
rete, resistenza di frenatura esterna) è necessario osservare le prescrizioni contenute nel capitolo 6.1.2 "Montaggio di filtro di rete,
induttanza di rete e resistenza di frenatura" a pagina 85.
0198441113763, V1.02, 12.2009
Distanze di montaggio, ventilazione
Servoamplificatore AC
83
6 Installazione
LXM32C
I cavi di connessione dell'apparecchio vengono condotti verso l'alto e
verso il basso. Per la circolazione dell'aria e la posa dei cavi è indispensabile rispettare le distanze minime.
a
c
d
d
d
d
b
Illustrazione 6.1
Distanze di montaggio e circolazione dell'aria
Distanza
Spazio libero al di sopra dell'apparecchio
b ≥ 100 mm
(b ≥ 40 in.)
Spazio libero al di sotto dell'apparecchio
c ≥ 60 mm
(c ≥ 23,5 in.)
Spazio libero davanti all'apparecchio
d ≥0 mm
(d ≥0 in.)
Spazio libero tra gli apparecchi per la
temperatura ambiente in funzione:
0 °C ... +50 °C
(32 °F ... 122 °F)
Le quote dei fori di fissaggio sono riportate nel capitolo 3.2.1 "Disegni
quotati" a pagina 23.
NOTA: lo strato di vernice eventualmente applicato sulle superfici esercita un'azione isolante. Prima di fissare l'apparecchio su una piastra di
montaggio verniciata, rimuovere la vernice in corrispondenza dei punti
di montaggio mettendo a nudo un'area consistente della superficie metallica.
왘 Osservare le condizioni ambientali prescritte nel capitolo 3 "Dati
tecnici" a pagina 21.
왘 Montare l'apparecchio in posizione verticale (±10°).
84
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Montaggio dell'apparecchio
a ≥ 100 mm
(a ≥ 40 in.)
LXM32C
6.1.2
6 Installazione
Montaggio di filtro di rete, induttanza di rete e resistenza di frenatura
Filtro di rete esterno
Gli azionamenti dispongono di un filtro di rete integrato.
In presenza di lunghi cavi motore, è necessario un filtro di rete esterno
aggiuntivo. Durante l'impiego di filtri di rete esterni, accertarsi che vengano rispettate le norme di compatibilità elettromagnetica.
Ulteriori informazioni sul tema
Pagina
Dati tecnici filtri di rete esterni (accessori)
46
Progettazione filtro di rete esterno (accessorio)
64
Installazione elettrica filtri di rete esterni (accessori)
102
Dati di ordinazione filtri di rete esterni (accessori)
384
왘 Montare il filtro di rete esterno sopra dell'apparecchio.
Induttanza di rete
In determinate condizioni di esercizio è necessario utilizzare un'induttanza di rete, vedere il capitolo 5.6 "Induttanza di rete" a pagina 63. L'induttanza di rete è corredata da una scheda informativa contenente
ulteriori indicazioni sulle modalità di montaggio. Le avvertenze relative
all'installazione elettrica sono riportate nel capitolo 6.2.8 "Connessione
dell'alimentazione stadio finale (CN1)" a pagina 102.
L'impiego di un'induttanza di rete permette di utilizzare una maggiore
potenza dell'apparecchio, vedere 3.3.1 "Stadio finale" a pagina 25. La
maggiore potenza si ottiene soltanto se si impostano i parametri corrispondenti al momento della messa in servizio.
Pagina
Dati tecnici induttanza di rete (accessori)
47
Progettazione dell'induttanza di rete (accessorio)
63
Installazione elettrica induttanza di rete (accessori)
102
Dati di ordinazione induttanza di rete (accessori)
383
0198441113763, V1.02, 12.2009
Ulteriori informazioni sul tema
Servoamplificatore AC
85
6 Installazione
LXM32C
Resistenza di frenatura esterna
@ AVVERTENZA
SUPERFICI MOLTO CALDE
A seconda delle condizioni di esercizio, la resistenza di frenatura può
raggiungere temperature superiori ai 250°C (482°F).
•
Evitare il contatto diretto con la resistenza di frenatura.
•
Non collocare componenti infiammabili o sensibili al calore nelle
immediate vicinanze della resistenza di frenatura.
•
Provvedere ad un'adeguata asportazione del calore.
•
Nei casi più critici, controllare la temperatura della resistenza di
frenatura con un ciclo di funzionamento di prova.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
In un ambiente con grado di protezione adeguato, le resistenze di frenatura IP65 possono essere montate anche all’esterno dell'armadio
elettrico.
La resistenza di frenatura è corredata da una scheda informativa contenente ulteriori indicazioni sulle modalità di montaggio.
Ulteriori informazioni sul tema
Pagina
Dati tecnici resistenza di frenatura
42
Montaggio di una resistenza di frenatura esterna (accessorio)
85
Installazione elettrica resistenza di frenatura (accessorio)
99
Impostazione dei parametri per la resistenza di frenatura
152
0198441113763, V1.02, 12.2009
Dati per l'ordinazione di resistenze di frenatura esterne (acces- 377
sori)
86
Servoamplificatore AC
LXM32C
6.2
6 Installazione
Installazione elettrica
@ PERICOLO
PERICOLO DI SCOSSA ELETTRICA A CAUSA DI CORPI ESTRANEI O
DANNI
La presenza di corpi estranei che conducono corrente all'interno del
prodotto o un danneggiamento di quest'ultimo possono provocare deviazioni della tensione.
•
Non utilizzare prodotti danneggiati.
•
Impedire che corpi estranei, quali trucioli, viti o pezzi di filo metallico, possano penetrare all'interno del prodotto.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI MESSA A TERRA INADEGUATA
Una messa a terra inadeguata espone al pericolo di scosse elettriche.
•
Collegare a terra il sistema di azionamento prima di applicare
tensione
•
Non utilizzare i tubi portacavi come conduttori di protezione, ma
un conduttore di protezione all'interno del tubo.
•
La sezione del conduttore di protezione deve essere conforme
alle norme vigenti.
•
Collegare a terra le schermature dei cavi su entrambi i lati, senza
tuttavia considerare le schermature equivalenti ad un conduttore
di protezione.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
QUESTO PRODOTTO PUÒ PROVOCARE LA PRESENZA DI UNA CORRENTE CONTINUA NEL CONDUTTORE DI PROTEZIONE
Se si utilizza un dispositivo di sicurezza per correnti disperse (interruttore automatico FI, RCD), occorre rispettare determinate condizioni.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
0198441113763, V1.02, 12.2009
Per le condizioni relative ai dispositivi di sicurezza per correnti disperse
vedere il capitolo 5.3 "Dispositivo di sicurezza per correnti disperse" a
pagina 61.
Tipi di logica
Servoamplificatore AC
Il prodotto supporta il tipo di logica 1 e il tipo di logica 2 per segnali digitali. Tenere presente che gli esempi di cablaggio rappresentano prevalentemente il tipo di logica 1. Il cablaggio della funzione di sicurezza
STO deve essere eseguito sempre con tipo di logica 1.
87
6 Installazione
6.2.1
LXM32C
Panoramica generale delle modalità di esecuzione
왘 Tenere in considerazione le informazioni fornite nel capitolo 5 "Pro-
gettazione". Le impostazioni scelte influenzano l'intera installazione.
왘 Accertarsi che durante l'intera installazione la tensione sia disinse-
rita.
Effettuare l'installazione rispettando la seguente sequenza:
Connessione di
Connessione a
Pagina
Attacco di terra
Vite di messa a
terra
90
Fasi del motore
CN10
91
Freno d'arresto
CN11
97
Collegamento bus DC
CN9
99
Resistenza di frenatura esterna
CN8
99
Alimentazione stadio finale
CN1
102
Encoder motore (encoder 1)
CN3
106
PTO: simulazione encoder ESIM
CN4
108
PTI: impulso/direzione P/D
CN5
110
PTI: segnali A/B
CN5
110
PTI: CW/CCW
CN5
110
Funzione di sicurezza STO
CN2
113
Alimentazione di controllo 24V
CN2
113
Ingressi analogici
CN6
116
Ingressi/uscite digitali
CN6
118
Interfaccia di messa in servizio (PC)
CN7
120
Tabella 6.1 Panoramica generale di installazione
0198441113763, V1.02, 12.2009
Al termine dell'installazione verificare la correttezza delle operazioni
eseguite.
88
Servoamplificatore AC
LXM32C
6.2.2
6 Installazione
Panoramica dei collegamenti
CN1
CN3
CN4
CN5
CN2
CN6
CN7
CN8
CN9
CN10
CN11
Illustrazione 6.2
Panoramica generale dei collegamenti dei segnali
Connessione
Assegnazione
1
HMI integrata
CN1
Alimentazione stadio finale
CN2
Alimentazione di controllo 24 V e funzione di sicurezza STO
CN3
Encoder motore (encoder 1)
CN4
PTO (simulazione encoder ESIM)
CN5
PTI (impulso/direzione, A/B, CW/CCW)
CN6
Ingressi analogici e ingressi/uscite digitali
CN7
Modbus (interfaccia di messa in servizio)
CN8
Resistenza di frenatura esterna
CN9
Collegamento bus DC per funzionamento parallelo
CN10
Fasi del motore
CN11
Freno d'arresto
0198441113763, V1.02, 12.2009
Tabella 6.2 Destinazione dei collegamenti dei segnali
Servoamplificatore AC
89
6 Installazione
6.2.3
LXM32C
Collegamento vite di messa a terra
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI MESSA A TERRA INADEGUATA
Questo sistema di azionamento presenta un'elevata corrente di dispersione > 3,5 mA.
•
Utilizzare un conduttore di protezione avente sezione minima di
10 mm2 (AWG 6) o due conduttori di protezione di sezione pari a
quella dei conduttori di alimentazione dei morsetti di potenza. Per
la messa a terra dell'apparecchio rispettare le norme e le disposizioni locali.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
La vite di messa a terra centrale del prodotto è posta in basso sul lato
anteriore.
왘 Collegare l'attacco di terra dell'apparecchio al punto centrale di
terra dell'impianto.
LXM32•...
[Nm] ([lb.in]) 5,5 (48,7)
0198441113763, V1.02, 12.2009
Coppia di serraggio delle viti serrafilo
90
Servoamplificatore AC
LXM32C
6.2.4
6 Installazione
Connessione delle fasi motore (CN10, motore)
@ PERICOLO
SCOSSA ELETTRICA
Sull'attacco di collegamento motore la tensione può raggiungere inaspettatamente valori elevati.
•
Il motore genera tensione quando l'albero viene ruotato. Proteggere l'albero motore da azionamenti esterni prima di effettuare
operazioni sul sistema di azionamento.
•
La tensione alternata può trasferirsi su eventuali conduttori inutilizzati del cavo motore. Pertanto, isolare i conduttori inutilizzati su
entrambe le estremità del cavo motore.
•
Il costruttore del sistema deve rispettare tutte le norme vigenti
riguardanti il collegamento a massa del sistema di azionamento.
In aggiunta alla messa a terra tramite il cavo motore, realizzare
un collegamento di massa alla carcassa del motore.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
MOVIMENTO INASPETTATO
In caso di errato collegamento o di errori di altro genere, i sistemi di
azionamento possono eseguire movimenti inaspettati.
•
Utilizzare l'apparecchio esclusivamente con motori omologati.
Anche in caso di impiego di motori simili permane un certo livello
di rischio dovuto alla diversa regolazione del sistema encoder.
•
Anche se i connettori per l'allacciamento della potenza risultano
meccanicamente adatti all'encoder, ciò NON significa che possano essere utilizzati.
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Servoamplificatore AC
91
6 Installazione
Specifiche dei cavi
LXM32C
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
-
PELV:
I fili per il freno d'arresto devono corrispondere al PELV
Struttura dei cavi:
Vedere la seguente tabella
lunghezza massima cavo
Dipende dai valori limite prescritti per
disturbi condotti dall'alimentazione,
vedere il capitolo 3.3.6 "Filtro di rete
interno" a pagina 45 e il capitolo 3.3.7
"Filtro di rete esterno (accessorio)" a
pagina 46.
Particolarità:
Contiene i fili per il freno d'arresto
La sezione dei conduttori deve essere tale da garantire in caso di guasto
l'intervento del fusibile sull'allacciamento di rete.
Osservare rigorosamente le seguenti avvertenze:
•
Si devono collegare esclusivamente i cavi motore originali (con due
fili per il freno d'arresto).
•
I fili per il freno d'arresto devono essere collegati anche in caso di
motori senza freno d'arresto mediante l'attacco CN11 dell'apparecchio. Sul lato motore collegare i fili ai relativi pin per il freno d'arresto, in modo che il cavo possa poi essere utilizzato per motori con o
senza freno d'arresto. Se i fili non vengono collegati sul lato motore,
devono essere isolati singolarmente (tensioni indotte).
•
Fare attenzione alla polarità della tensione del freno d'arresto.
•
La tensione per il freno d'arresto dipende dal motore e dalla lunghezza del cavo motore (PELV). Tenere presenti la tolleranza per la
tensione dell'alimentazione di controllo e la tensione prescritta per il
freno d'arresto.
왘 Utilizzare cavi preconfezionati (pagina 377) per ridurre al minimo il
0198441113763, V1.02, 12.2009
rischio di errori di cablaggio.
92
Servoamplificatore AC
LXM32C
Caratteristiche dei morsetti CN10
6 Installazione
I morsetti sono ammessi per conduttori fissi e con cavi sottili. Attenersi
alla sezione massima della connessione. Tenere presente che i capicorda aumentano la sezione del conduttore. Inserire i conduttori con
cautela per ottenere il massimo amperaggio e la massima resistenza
alle vibrazioni.
LXM32•U45••, LXM32•U60••, LXM32•U90••,
LXM32•D12••, LXM32•D18••, LXM32•D30••
Sezione della connessione
[mm2]
Coppia di serraggio delle viti serrafilo
[Nm] ([lb.in]) 0,68 (6,0)
Lunghezza spellatura
[mm]
6 ... 7
Sezione della connessione
[mm2]
0,75 ... 10
(AWG 18 ...
AWG 8)
Coppia di serraggio delle viti serrafilo
[Nm] ([lb.in]) 1,81 (16,0)
Lunghezza spellatura
[mm]
0,75 ... 5,3
(AWG 18 ...
AWG 10)
LXM32•D72N4
0198441113763, V1.02, 12.2009
8 ... 97
Servoamplificatore AC
93
6 Installazione
Assemblaggio dei cavi
LXM32C
Per l'assemblaggio del cavo rispettare le quote indicate.
A
1
2a
BK L1
BK L2
BK L3
GN/YE
WH
GY
D
2b
C
D
BK L1 BK L2 BK L3
3
GN/YE
WH
GY
B
A
Illustrazione 6.3
Fasi di assemblaggio (1-3) del cavo motore
LXM32•...
A
mm
140
B
mm
135
C
mm
130
D
mm
50
왘 (1) Rimuovere la guaina del cavo per una lunghezza A, vedere
tabella.
Per il posizionamento nel morsetto schermato è necessario che lo
schermo sia lungo almeno quanto la lunghezza D.
(2b) Fissare la treccia schermante con una guaina termoretraibile.
Tenere presente che la treccia schermante del cavo motore deve
essere in gran parte aderente all'interno del morsetto schermante
CEM.
94
Servoamplificatore AC
0198441113763, V1.02, 12.2009
왘 (2a) Spingere indietro sulla guaina del cavo la treccia schermante.
LXM32C
6 Installazione
왘 (3) Accorciare i conduttori del freno d'arresto alla lunghezza B e i
tre conduttori delle fasi del motore alla lunghezza C. Il conduttore di
protezione ha lunghezza A.
Collegare i conduttori per il freno d'arresto all'apparecchio anche in
caso di motori senza freno d'arresto (tensioni indotte). Vedere
anche 6.2.5 "Connessione del freno d'arresto (CN11, Brake)" a
pagina 97.
Attenersi alla sezione massima della connessione. Tenere presente che
i capicorda aumentano la sezione del conduttore.
Monitoraggi
L'apparecchio tiene sotto controllo le fasi motore.
•
cortocircuiti tra le fasi motore
•
cortocircuiti tra fasi motore e terra
Eventuali cortocircuiti tra le fasi motore verso il bus DC, la resistenza di
frenatura o i conduttori del freno d'arresto non vengono riconosciuti
dall'apparecchio.
Schema di collegamento motore
0198441113763, V1.02, 12.2009
Illustrazione 6.4
Servoamplificatore AC
U
V
U
+
-
W
V
BR+
W
CN11
Brake
CN10 Motor
M
3~
BR-
Schema di collegamento motore con freno d'arresto
Connessione
Spiegazione
Colore
U
Fase motore
nero L1 (BK)
V
Fase motore
nero L2 (BK)
W
Fase motore
nero L3 (BK)
PE
Conduttore di protezione
verde/giallo (GN/YE)
BR+
Freno d'arresto +
bianco (WH) o nero 5
(BK)
BR-
Freno d'arresto -
grigio (GR) o nero 6 (BK)
95
6 Installazione
Collegamento del cavo motore
LXM32C
왘 Rispettare le prescrizioni CEM per il cavo motore; vedere a pagina
54.
왘 Collegare le fasi motore e il conduttore di protezione a CN10.
Accertarsi che le connessioni U, V, W e PE (terra) sul lato motore
corrispondano a quelle sul lato apparecchio.
왘 Osservare la coppia di serraggio delle viti serrafilo prescritta.
왘 Collegare all'attacco BR+ di CN11 il filo bianco o il filo nero con la
sigla 5.
Collegare all'attacco BR- di CN11 il filo grigio o il filo nero con la
sigla 6 (vedere anche pagina 97).
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
왘 Fissare un'ampia parte della schermatura del cavo nel morsetto
schermato.
0198441113763, V1.02, 12.2009
Posare il cavo motore e il cavo encoder iniziando dal
motore e procedendo verso l'apparecchio. Tale operazione
è spesso più veloce e agevole se si utilizzano i connettori
confezionati.
96
Servoamplificatore AC
LXM32C
6.2.5
6 Installazione
Connessione del freno d'arresto (CN11, Brake)
@ PERICOLO
SCOSSA ELETTRICA
Sull'attacco di collegamento motore la tensione può raggiungere inaspettatamente valori elevati.
•
Il motore genera tensione quando l'albero viene ruotato. Proteggere l'albero motore da azionamenti esterni prima di effettuare
operazioni sul sistema di azionamento.
•
La tensione alternata può trasferirsi su eventuali conduttori inutilizzati del cavo motore. Pertanto, isolare i conduttori inutilizzati su
entrambe le estremità del cavo motore.
•
Il costruttore del sistema deve rispettare tutte le norme vigenti
riguardanti il collegamento a massa del sistema di azionamento.
In aggiunta alla messa a terra tramite il cavo motore, realizzare
un collegamento di massa alla carcassa del motore.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
Il freno d'arresto opzionale di un motore si collega all'attacco CN11. Il
comando del freno d'arresto integrato rilascio il freno all'attivazione dello
stadio finale. La disattivazione dello stadio finale provoca la nuova chiusura del freno d'arresto.
La sezione del conduttore deve essere tale da garantire l'intervento del
fusibile sull'allacciamento di rete.
Osservare rigorosamente le seguenti avvertenze:
Si devono collegare esclusivamente i cavi motore originali (con due
fili per il freno d'arresto).
•
I fili per il freno d'arresto devono essere collegati anche in caso di
motori senza freno d'arresto mediante l'attacco CN11 dell'apparecchio (tensioni indotte). L'altra estremità dei fili deve essere isolata o,
come avviene per i cavi preconfezionati, collegata ai relativi pin del
connettore lato motore.
•
Fare attenzione alla polarità della tensione del freno d'arresto.
•
La tensione per il freno d'arresto dipende dal motore e dalla lunghezza del cavo motore (PELV). Tenere presenti la tolleranza per la
tensione dell'alimentazione di controllo e la tensione prescritta per il
freno d'arresto.
0198441113763, V1.02, 12.2009
•
Servoamplificatore AC
97
6 Installazione
Caratteristiche dei morsetti a molla
CN11
LXM32C
LXM32•...
corrente massima sui morsetti
[A]
Sezione della connessione
[mm2
1,7
0,75 ... 2,5
(AWG 18 ...
AWG 14)
Lunghezza spellatura
[mm]
12 ... 13
]
I morsetti sono ammessi per conduttori fissi e con cavi sottili. Attenersi
alla sezione massima della connessione. Tenere presente che i capicorda aumentano la sezione del conduttore. Inserire i conduttori con
cautela per ottenere il massimo amperaggio e la massima resistenza
alle vibrazioni.
Schema di collegamento del freno
d'arresto
BR- BR+
V
U
CN11
Brake
Schema di collegamento motore con freno d'arresto
Connessione
Spiegazione
Colore
U
Fase motore
nero L1 (BK)
V
Fase motore
nero L2 (BK)
W
Fase motore
nero L3 (BK)
PE
Conduttore di protezione
verde/giallo (GN/YE)
BR+
Freno d'arresto +
bianco (WH) o nero 5
(BK)
BR-
Freno d'arresto -
grigio (GR) o nero 6 (BK)
Il confezionamento dei cavi, il cablaggio e la connessione sono descritti
nel capitolo 6.2.4 "Connessione delle fasi motore (CN10, motore)" a pagina 91.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
98
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Illustrazione 6.5
BR+
BR-
W
CN10 Motor
M
3~
LXM32C
6.2.6
6 Installazione
Connessione bus DC (CN9, bus DC)
@ AVVERTENZA
DANNI IRREPARABILI A PARTI DELL'IMPIANTO E PERDITA DI CONTROLLO
Se il collegamento in parallelo del bus DC non viene eseguito correttamente, i sistemi di azionamento possono danneggiarsi irreparabilmente subito o con un certo ritardo.
•
Osservare i requisiti per l'uso del collegamento in parallelo del
bus DC.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Requisiti di impiego
6.2.7
I requisiti e i valori limite per il collegamento in parallelo di più LXM32 al
bus DC sono consultabili su Internet come indicazione d'uso
MNA01D001.
Connessione resistenza di frenatura (CN8, Braking Resistor)
@ AVVERTENZA
MOTORE NON FRENATO
Una resistenza di frenatura insufficiente produce sovratensioni sul
bus DC e determina il disinserimento dello stadio finale. La conseguenza è che il motore non viene più frenato attivamente.
•
Verificare il dimensionamento della resistenza di frenatura.
•
Verificare l'impostazione dei parametri della resistenza di frenatura.
•
Con dei funzionamenti di prova, controllare il valore I2t nelle condizioni più critiche. Con un valore I2t del 100%, l'apparecchio si
disinserisce.
•
Durante i calcoli e i test, tenere presente che in caso di una tensione di rete più alta, nei condensatori del bus DC può essere
immagazzinata meno energia di frenata.
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Ulteriori informazioni sul tema
Pagina
Dati tecnici resistenza di frenatura
42
Dimensionamento della resistenza di frenatura
66
Montaggio di una resistenza di frenatura esterna (accessorio)
85
Impostazione dei parametri per la resistenza di frenatura
152
Dati per l'ordinazione di resistenze di frenatura esterne (acces- 377
sori)
Servoamplificatore AC
99
6 Installazione
6.2.7.1
LXM32C
Resistenza di frenatura interna
Nell'apparecchio è integrata una resistenza di frenatura che ha il compito di assorbire l'energia di frenata. Alla consegna, la resistenza di frenatura interna è inserita.
6.2.7.2
Resistenza di frenatura esterna
L'impiego di una resistenza di frenatura esterna si rende necessario in
quelle applicazioni che prevedono forti frenate del motore e di conseguenza una quantità di energia in eccesso che la resistenza di frenatura
interna non è più in grado di assorbire.
La scelta e il dimensionamento della resistenza di frenatura esterna
sono descritti nel capitolo 5.8 "Dimensionamento della resistenza di frenatura" a pagina 66. Le resistenze di frenatura idonee sono riportate nel
capitolo 12 "Accessori e parti di ricambio" a pagina 382.
Specifiche dei cavi
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
-
PELV:
-
Struttura dei cavi:
Sezione minima dei conduttori: stessa
sezione dell'alimentazione dello stadio
finale, vedere pagina 102. La sezione
dei conduttori deve essere tale da
garantire in caso di guasto l'intervento
del fusibile sull'allacciamento di rete.
lunghezza massima cavo
3m
Particolarità:
Resistenza alla temperatura
Le resistenze di frenatura consigliate nel capitolo 12 "Accessori e parti
di ricambio" dispongono di un cavo a 3 fili di lunghezza compresa tra
0,75 m e 3 m.
Caratteristiche dei morsetti
LXM32•...
Sezione della connessione
[mm2]
0,75 ... 3,3
(AWG 18 ...
AWG 12)
Coppia di serraggio delle viti serrafilo
[Nm]([lb.in])
0,51 (4,5)
Lunghezza spellatura
[mm]
10 ... 11
0198441113763, V1.02, 12.2009
I morsetti sono ammessi per conduttori fissi e con cavi sottili. Attenersi
alla sezione massima della connessione. Tenere presente che i capicorda aumentano la sezione del conduttore.
100
Servoamplificatore AC
LXM32C
6 Installazione
Schema di collegamento
CN8 Braking resistor
PB
PB
PC/-
PC/-
Illustrazione 6.6
Collegamento della resistenza di
frenatura esterna
Schema di collegamento della resistenza di frenatura
왘 Disinserire tutte le tensioni di alimentazione. Osservare le istruzioni
relative alla sicurezza per i lavori di installazione elettrica.
왘 Accertare la totale assenza di tensione (istruzioni relative alla sicu-
rezza).
왘 Rimuovere la copertura della connessione.
왘 Collegare a terra il collegamento PE (terra) della resistenza di fre-
natura.
왘 Collegare la resistenza di frenatura esterna all'apparecchio; vedere
Illustrazione 6.6. Osservare la coppia di serraggio delle viti serrafilo
prescritta.
왘 Fissare un'ampia parte della schermatura del cavo sul fissaggio
schermato posto nella parte inferiore dell'apparecchio.
0198441113763, V1.02, 12.2009
La commutazione tra resistenza interna ed esterna avviene attraverso il
parametro RESint_ext. Per l'impostazione dei parametri della resistenza di frenatura vedere il capitolo 7.5.10 "Impostazione dei parametri
per la resistenza di frenatura" a pagina 152. Accertarsi che la resistenza
selezionata sia anche collegata. All'atto della messa in servizio, controllare l'efficienza della resistenza di frenatura in condizioni realistiche, vedere il capitolo 7.5.10 "Impostazione dei parametri per la resistenza di
frenatura" a pagina 152.
Servoamplificatore AC
101
6 Installazione
6.2.8
LXM32C
Connessione dell'alimentazione stadio finale (CN1)
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI MESSA A TERRA INADEGUATA
Questo sistema di azionamento presenta un'elevata corrente di dispersione > 3,5 mA.
•
Utilizzare un conduttore di protezione avente sezione minima di
10 mm2 (AWG 6) o due conduttori di protezione di sezione pari a
quella dei conduttori di alimentazione dei morsetti di potenza. Per
la messa a terra dell'apparecchio rispettare le norme e le disposizioni locali.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ AVVERTENZA
PROTEZIONE INSUFFICIENTE CONTRO LE SOVRACORRENTI
•
Utilizzare i fusibili esterni prescritti nel capitolo "Dati tecnici".
•
Non collegare il prodotto a una rete la cui resistenza ai cortocircuiti superi la corrente massima di cortocircuito indicata nel capitolo "Dati tecnici".
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
ATTENZIONE
DANNI IRREPARABILI IN CASO DI TENSIONE DI RETE ERRATA
L'allacciamento ad una tensione di rete non adatta può arrecare danni
irreparabili al prodotto.
•
Prima di inserire e di configurare il prodotto assicurarsi che esso
sia omologato per la tensione di rete.
L'inosservanza di questa precauzione può avere come conseguenza danni materiali.
I prodotti dono realizzati specificamente per il comparto industriale e
possono funzionare solo con connessione fissa.
0198441113763, V1.02, 12.2009
Prima di collegare l'apparecchio verificare le architetture di rete ammesse, vedere il capitolo 3.3.1 "Stadio finale" a pagina 25.
102
Servoamplificatore AC
LXM32C
6 Installazione
Specifiche dei cavi
Caratteristiche dei morsetti CN1
Verificare l'idoneità dei cavi (vedere pagina 58) e la conformità del collegamento alle norme CEM, vedere pagina 54.
Schermatura:
-
Twisted-pair:
-
PELV:
-
Struttura dei cavi:
La sezione dei conduttori deve essere
tale da garantire in caso di guasto
l'intervento del fusibile sull'allacciamento di rete.
lunghezza massima cavo
-
Particolarità:
-
LXM32•U45••, LXM32•U60••, LXM32•U90••,
LXM32•D12••, LXM32•D18••, LXM32•D30••
Sezione della connessione
[mm2]
Coppia di serraggio delle viti serrafilo
[Nm] ([lb.in]) 0,68 (6,0)
Lunghezza spellatura
[mm]
6 ... 7
Sezione della connessione
[mm2]
0,75 ... 10
(AWG 18 ...
AWG 8)
Coppia di serraggio delle viti serrafilo
[Nm] ([lb.in]) 1,81 (16,0)
Lunghezza spellatura
[mm]
0,75 ... 5,3
(AWG 18 ...
AWG 10)
LXM32•D72N4
8 ... 97
I morsetti sono ammessi per conduttori fissi e con cavi sottili. Attenersi
alla sezione massima della connessione. Tenere presente che i capicorda aumentano la sezione del conduttore. Inserire i conduttori con
cautela per ottenere il massimo amperaggio e la massima resistenza
alle vibrazioni.
0198441113763, V1.02, 12.2009
Condizioni preliminari per il
collegamento dell'alimentazione
stadio finale
Servoamplificatore AC
Osservare rigorosamente le seguenti avvertenze:
•
Gli apparecchi trifase possono essere collegati e azionati esclusivamente in reti trifase.
•
Predisporre fusibili di rete a monte. Per i valori e i tipi di fusibili raccomandati vedere il capitolo 3.3.1 "Stadio finale" a pagina 25.
•
Rispettare le norme CEM. Se necessario, utilizzare scaricatori di
sovratensioni, filtri di rete e induttanze di rete; vedere pagina 63.
•
Se si impiega un filtro di rete esterno è necessario schermare e
mettere a terra su entrambi i lati il cavo della rete tra il filtro di rete
esterno e l'apparecchio, se tale cavo è più lungo di 200 mm.
•
Rispettare i requisiti per l'installazione a norma UL; vedere pagina
21.
•
A causa delle elevate correnti di dispersione è necessario utilizzare
un conduttore di protezione avente sezione minima di 10 mm2
(AWG 6) o due conduttori di protezione di sezione pari a quella dei
conduttori di alimentazione dei morsetti di potenza. Per la messa a
terra dell'apparecchio rispettare le norme e le disposizioni locali.
103
6 Installazione
Accessori: induttanza di rete e filtro
di rete esterno
Connessione apparecchio
monofase
LXM32C
Osservare le informazioni sull'accessorio induttanza di rete e sull'accessorio filtro di rete esterno.
Ulteriori informazioni sul tema
Pagina
Dati tecnici induttanza di rete (accessori)
47
Progettazione dell'induttanza di rete (accessorio)
63
Montaggio induttanza di rete (accessori)
85
Dati di ordinazione induttanza di rete (accessori)
383
Ulteriori informazioni sul tema
Pagina
Dati tecnici filtri di rete esterni (accessori)
46
Progettazione filtro di rete esterno (accessorio)
64
Montaggio filtro di rete esterno (accessori)
85
Dati di ordinazione filtri di rete esterni (accessori)
384
Illustrazione 6.7 mostra una panoramica generale del collegamento
dell'alimentazione stadio finale per un apparecchio monofase. La figura
mostra anche il cablaggio dei componenti disponibili come accessori,
vale a dire del filtro di rete esterno e dell'induttanza di rete.
1
L1
E1
N/L2
L1
N/L2
Illustrazione 6.7
L1'
N/L2'
3
L1
N/L2
Panoramica generale alimentazione stadio finale per apparecchio monofase
Induttanza di rete (accessorio)
filtro di rete esterno (accessorio)
Azionamento
0198441113763, V1.02, 12.2009
(1)
(2)
(3)
S1
2
104
Servoamplificatore AC
6 Installazione
Illustrazione 6.8
N/L2 L1
CN1 Mains 115-240VAC
LXM32C
Schema di collegamento alimentazione stadio finale per
apparecchio monofase
왘 Verificare l'architettura di rete. Le architetture di rete ammesse sono
riportate nel capitolo 3.3.1 "Stadio finale" a pagina 25.
왘 Collegare il cavo della rete a (Illustrazione 6.8). Osservare la coppia
di serraggio delle viti serrafilo prescritta.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Connessione apparecchio trifase
Illustrazione 6.9 mostra una panoramica generale del collegamento
dell'alimentazione stadio finale per un apparecchio trifase. La figura mostra anche il cablaggio dei componenti disponibili come accessori, vale
a dire del filtro di rete esterno e dell'induttanza di rete.
1
2
L1
E1
S1
L1
L1'
E2
S2
L2
L2'
E3
S3
L3
L3'
L2
0198441113763, V1.02, 12.2009
L3
Illustrazione 6.9
(1)
(2)
(3)
Servoamplificatore AC
3
L1
L2
L3
Schema di collegamento, alimentazione stadio finale per
apparecchio trifase
Induttanza di rete (accessorio)
filtro di rete esterno (accessorio)
Azionamento
105
Illustrazione 6.10
L3 L2 L1
LXM32C
CN1 Mains 400-480VAC
6 Installazione
Schema di collegamento alimentazione stadio finale per
apparecchio trifase
왘 Verificare l'architettura di rete. Le architetture di rete ammesse sono
riportate nel capitolo 3.3.1 "Stadio finale" a pagina 25.
왘 Collegare il cavo della rete a (Illustrazione 6.10). Osservare la cop-
pia di serraggio delle viti serrafilo prescritta.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
6.2.9
Connessione encoder motore (CN3)
Funzione e tipo di encoder
L'encoder motore è un encoder Hiperface integrato nel motore. Esso
trasmette la posizione del motore all'apparecchio sotto forma di segnale
sia analogico che digitale.
Osservare i motori ammessi, vedere capitolo 3.3 "Dati elettrici".
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
necessario
PELV:
necessario
Struttura dei cavi:
6*0,14 mm2 + 2*0,34 mm2
(6*AWG 24 + 2*AWG 20)
lunghezza massima cavo
100 m
Particolarità:
I cavi dei bus di campo non sono
adatti alla connessione dell'encoder
0198441113763, V1.02, 12.2009
Specifiche dei cavi
106
Servoamplificatore AC
LXM32C
6 Installazione
Schema di collegamento
CN3
B
CN3 Encoder-1
8
Illustrazione 6.11
1
A
B
8
7
6
5
4
3
2
1
A
Schema di collegamento dell'encoder motore
Pin
Segnale
Motore, Pin
Copp Spiegazione
ia
I/U
1
COS+
9
2
segnale coseno
I
2
REFCOS
5
2
Riferimento per segnale coseno
I
3
SIN+
8
3
Segnale seno
I
6
REFSIN
4
3
Riferimento per il segnale seno
I
4
Data
6
1
Dati ricevuti, dati di trasmissione
I/U
5
Data
7
1
Dati ricevuti, dati di trasmissione, invertiti
I/U
7
reserved
4
non assegnato
8
reserved
4
non assegnato
A
ENC+10V_OUT
10
5
Alimentazione encoder
B
ENC_0V
11
5
Potenziale di riferimento per alimentazione encoder
SHLD
Collegamento encoder motore
U
Schermatura
왘 Assicurarsi che il cablaggio, i cavi e l'interfaccia collegata siano con-
formi ai requisiti PELV.
왘 Osservare le prescrizioni CEM per i cavi dell'encoder a pagina 54.
Predisporre la compensazione del potenziale utilizzando conduttori
di collegamento equipotenziale.
왘 Collegare il connettore a CN3, encoder-1.
0198441113763, V1.02, 12.2009
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Posare il cavo motore e il cavo encoder iniziando dal
motore e procedendo verso l'apparecchio. Tale operazione
è spesso più veloce e agevole se si utilizzano i connettori
confezionati.
Servoamplificatore AC
107
6 Installazione
LXM32C
6.2.10 Connessione PTO (Pulse Train Out, CN4)
Sull'uscita PTO (Pulse Train Out, CN4) vengono emessi i segnali da 5 V.
A seconda del parametro PTO_mode questi sono segnali ESIM (simulazione encoder) o segnali di ingresso PTI trasmessi logicamente (segnali P/D, segnali A/B, segnali CW/CCW). I segnali di uscita PTO
possono essere utilizzati come segnale di ingresso PTI per un altro apparecchio. Il livello di segnalazione è conforme a RS422 vedere il capitolo 3.3.3.1 "Uscita PTO (CN4)" a pagina 35. L'uscita PTO trasporta
segnali a 5 V, anche se il segnale di ingresso PTI è un segnale a 24 V.
Specifiche dei cavi
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
necessario
PELV:
necessario
Struttura dei cavi:
8*0,14 mm2 (8*AWG 24)
lunghezza massima cavo
100 m
Particolarità:
-
왘 Utilizzare conduttori di collegamento equipotenziale; vedere pagina
58.
왘 Utilizzare cavi preconfezionati (vedere pagina 381) per ridurre al
minimo il rischio di errori di cablaggio.
Illustrazione 6.12
108
CN4
8
1
8
7
6
5
4
3
2
1
Schema di collegamento Pulse Train Out (PTO)
Servoamplificatore AC
0198441113763, V1.02, 12.2009
CN4 PTO
Schema di collegamento
LXM32C
6 Installazione
PTO: segnali ESIM
PTO: segnali PTI trasmessi
logicamente
Pin
Segnale
Copp Spiegazione
ia
I/U
1
ESIM_A
2
ESIM canale A
U (5 V)
2
ESIM_A
2
ESIM canale A, invertito
U (5 V)
4
ESIM_B
1
ESIM canale B
U (5 V)
5
ESIM_B
1
ESIM canale B, invertito
U (5 V)
3
ESIM_I
3
ESIM impulso di posizione
U (5 V)
6
ESIM_I
3
ESIM impulso di posizione,
invertito
U (5 V)
7
GND
4
Potenziale di riferimento
8
GND
4
Potenziale di riferimento
Sull'uscita PTO i segnali di ingresso PTI possono essere emessi nuovamente per azionare un apparecchio successivo (Daisy chain). A seconda del segnale di ingresso il segnale di uscita può essere un segnale
P/D, A/B o CW/CCW. L'uscita PTO trasporta segnali a 5 V.
Pin
Segnale P/D 1)
Segnale A/B 2)
Segnale CW/
CCW 3)
Copp Spiegazione
ia
I/U
1
PULSE(5)
ENC_A(5)
CW(5)
2
vedere connessione PTI
pin 1
U (5 V)
2
PULSE
ENC_A
CW
2
vedere connessione PTI
pin 2
U (5 V)
4
DIR(5)
ENC_B(5)
CCW(5)
1
vedere connessione PTI
pin 4
U (5 V)
5
DIR
ENC_B
CCW
1
vedere connessione PTI
pin 5
U (5 V)
1) vedere pagina 111
2) vedere pagina 111
3) vedere pagina 111
Collegamento PTO
왘 Collegare il connettore a CN4. Se non si utilizza un cavo preassem-
blato, osservare la corretta destinazione dei contatti.
0198441113763, V1.02, 12.2009
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Servoamplificatore AC
109
6 Installazione
LXM32C
6.2.11 Connessione PTI (CN5, Pulse Train In)
In corrispondenza della connessione PTI (Pulse Train In, CN5) è possibile connettere segnali impulso/direzione (P/D), segnali A/B o segnali
CW/CCW.
È possibile collegare segnali a 5 V o segnali a 24 V, vedere capitolo
3.3.3.2 "Ingresso PTI (CN5)" a pagina 36. L'assegnazione dei pin e i
cavi sono differenti.
@ AVVERTENZA
MOVIMENTO INASPETTATO
La trasmissione di segnali errati o disturbati come valori di consegna
può provocare movimenti inaspettati.
•
Utilizzare cavi schermati twisted-pair.
•
Utilizzare per l'interfaccia la modalità operativa con segnali in
controfase.
•
Evitare l'utilizzo di segnali non in controfase nelle applicazioni critiche o in ambienti disturbati.
•
Evitare di utilizzare segnali non in controfase quando i cavi superano la lunghezza di 3m e limitare la frequenza a 50kHz
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Specifiche dei cavi PTI
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
necessario
PELV:
necessario
Sezione minima dei fili:
0,14 mm2 (AWG 24)
lunghezza massima cavo
100 m con RS422
10 m con Push pull
1 m con open collector
Particolarità:
-
왘 Utilizzare conduttori di collegamento equipotenziale; vedere pagina
58.
왘 Utilizzare cavi preconfezionati (pagina 381) per ridurre al minimo il
0198441113763, V1.02, 12.2009
rischio di errori di cablaggio.
110
Servoamplificatore AC
LXM32C
6 Installazione
6.2.11.1 Destinazione dei collegamenti PTI 5 V
CN5 PTI
CN5
Illustrazione 6.13
Segnali P/D 5 V
Segnali A/B 5 V
0198441113763, V1.02, 12.2009
Segnali CW/CCW 5 V
Collegamento Pulse Train IN (PTI)
5V
8
1
8
7
6
5
4
3
2
1
Schema di collegamento Pulse Train In (PTI) 5 V
Pin
Segnale
Copp Spiegazione
ia
I/U
1
PULSE(5)
2
Pulse 5V
I (5 V)
2
PULSE
2
Pulse, invertito
I (5 V)
4
DIR(5)
1
Direzione 5V
I (5 V)
5
DIR
1
Direzione, invertito
I (5 V)
Pin
Segnale
Copp Spiegazione
ia
I/U
1
ENC_A(5)
2
Encoder canale A 5V
I (5 V)
2
ENC_A
2
Encoder canale A, invertito
I (5 V)
4
ENC_B(5)
1
Encoder canale B 5V
I (5 V)
5
ENC_B
1
Encoder canale B, invertito
I (5 V)
Pin
Segnale
Copp Spiegazione
ia
I/U
1
CW(5)
2
Pulse positivo 5V
I (5 V)
2
CW
2
Pulse positive, invertito
I (5 V)
4
CCW(5)
1
Pulse negativo 5V
I (5 V)
5
CCW
1
Pulse negativo, invertito
I (5 V)
왘 Collegare il connettore a CN5. Se non si utilizza un cavo preassem-
blato, osservare la corretta destinazione dei contatti.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Servoamplificatore AC
111
6 Installazione
LXM32C
6.2.11.2 Destinazione dei collegamenti PTI 24 V
Tenere presente che in caso di segnali a 24 V le coppie di fili devono essere assegnate diversamente che in caso di segnali 5 V! Utilizzare un
cavo corrispondente alle specifiche dei cavi e confezionarlo come illustrato nella seguente figura.
CN5 PTI
CN5
Segnali P/D 24 V
Segnali A/B 24 V
Segnali CW/CCW 24 V
112
1
Schema di collegamento Pulse Train In (PTI) 24 V
Pin
Segnale
Copp Spiegazione
ia
I/U
7
PULSE(24)
A
Pulse 24V
I (24 V)
2
PULSE
A
Pulse, invertito
I (24 V)
8
DIR(24)
B
Direzione 24V
I (24 V)
5
DIR
B
Direzione, invertito
I (24 V)
Pin
Segnale
Copp Spiegazione
ia
I/U
7
ENC_A(24)
A
Encoder canale A 24V
I (24 V)
2
ENC_A
A
Encoder canale A, invertito
I (24 V)
8
ENC_B(24)
B
Encoder canale B 24V
I (24 V)
5
ENC_B
B
Encoder canale B, invertito
I (24 V)
Pin
Segnale
Copp Spiegazione
ia
I/U
7
CW(24)
A
Pulse positivo 24V
I (24 V)
2
CW
A
Pulse positive, invertito
I (24 V)
8
CCW(24)
B
Pulse negativo 24V
I (24 V)
5
CCW
B
Pulse negativo, invertito
I (24 V)
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Illustrazione 6.14
8
8
7
6
5
4
3
2
1
LXM32C
Collegamento Pulse Train In (PTI)
24 V
6 Installazione
왘 Collegare il connettore a CN5. Accertarsi che l'assegnazione dei
connettori e l'accoppiamento siano corretti.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
6.2.12 Connessione alimentazione di controllo e STO (CN2, DC Supply e STO)
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI IMPIEGO DI UN'UNITÀ DI ALIMENTAZIONE NON ADEGUATA
La tensione di alimentazione +24VDC è collegata nel sistema di azionamento a molti segnali con i quali è possibile entrare in contatto.
•
Utilizzare un'unità di alimentazione conforme ai requisiti PELV
(Protective Extra Low Voltage).
•
Collegare l'uscita negativa dell'alimentatore al PE (terra).
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
ATTENZIONE
DISTRUZIONE DEI CONTATTI
La connessione per l'alimentazione di controllo del prodotto non è dotata di limitazione della corrente transitoria di inserzione. L'inserimento della tensione mediante commutazione dei contatti può
provocare la distruzione o la saldatura dei contatti.
•
Utilizzare un'unità di alimentazione che limiti il valore di punta
della corrente di uscita ad un valore ammesso per il contatto.
•
Collegare l'ingresso di rete dell'unità di alimentazione al posto
della tensione di uscita.
L'inosservanza di questa precauzione può avere come conseguenza danni materiali.
Funzione di sicurezza STO
@ AVVERTENZA
PERDITA DELLA FUNZIONE DI SICUREZZA
In caso di uso errato è possibile perdere la funzione di sicurezza.
•
Rispettare i requisiti per l'uso della funzione di sicurezza.
Il mancato rispetto di queste precauzioni può provocare ferite
gravi o la morte
0198441113763, V1.02, 12.2009
Per informazioni sui segnali della funzione di sicurezza STO consultare
il capitolo 5.9 "Funzione di sicurezza STO ("Safe Torque Off")". Se la
funzione di sicurezza NON è richiesta, gli ingressi STO_A e STO_B devono essere collegati con +24VDC.
Servoamplificatore AC
113
6 Installazione
Specifiche dei cavi CN2
LXM32C
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
- 1)
Twisted-pair:
-
PELV:
necessario
Sezione minima dei fili:
0,75 mm2 (AWG 18)
lunghezza massima cavo
100 m
Particolarità:
-
1) vedere 5.9.3 "Requisiti per l'uso della funzione di sicurezza"
Caratteristiche del morsetto a molla
CN2
LXM32•...
corrente massima sui morsetti
[A]
16 1)
Sezione della connessione
[mm2]
0,5 ... 2,5
(AWG 20 ...
AWG 14)
Lunghezza spellatura
[mm]
12 ... 13
1) Se si collegano più apparecchi attenersi alla corrente massima sui morsetti
ammessa
Corrente sui morsetti ammessa
dell'alimentazione di controllo
•
Gli attacchi CN2, Pin 3 e 7 come pure CN2, Pin 4 e 8 (vedere Illustrazione 6.15) possono essere utilizzati come attacchi 24V/0V per
ulteriori utenze.1 A questo proposito osservare la massima corrente
sui morsetti ammessa ( "Caratteristiche del morsetto a molla CN2").
•
La tensione sull'uscita del freno d'arresto dipende dall'alimentazione di controllo. Tenere presente che anche la corrente del freno
d'arresto passa da questo morsetto.
•
Finché l'alimentazione ausiliaria rimane inserita, la posizione del
motore viene mantenuta anche se l'alimentazione dello stadio finale
è disinserita.
1. Nel connettore, il Pin 1 è ponticellato con Pin 5, il Pin 2 con il Pin 6, il Pin 3 con il
Pin 7 e il Pin 4 con il Pin 8.
114
Servoamplificatore AC
0198441113763, V1.02, 12.2009
I morsetti sono ammessi per conduttori fissi e con cavi sottili. Attenersi
alla sezione massima della connessione. Tenere presente che i capicorda aumentano la sezione del conduttore. Inserire i conduttori con
cautela per ottenere il massimo amperaggio e la massima resistenza
alle vibrazioni.
LXM32C
6 Installazione
Schema di collegamento
~
+
24VDC
STO_A 1
5
1
5
STO_B 2
6
2
6
24V 3
7
3
7
0V 4
8
4
8
CN2 DC Supply / STO
CN2 DC Supply / STO
STO_A
STO_B
24V
0V
Illustrazione 6.15
1
5
2
6
3
7
4
8
Schema di collegamento dell'alimentazione ausiliaria
Pin
Segnale
Spiegazione
1, 5
STO_A
Funzione di sicurezza STO: connessione bicanale, connessione A
2, 6
STO_B
Funzione di sicurezza STO: connessione bicanale, connessione B
3, 7
+24VDC
Alimentazione di controllo 24 V
4, 8
0VDC
Potenziale di riferimento per alimentazione di controllo 24V; potenziale di riferimento per STO
Collegamento funzione di sicurezza
STO
왘 Assicurarsi che il cablaggio, i cavi e le interfacce collegate siano
conformi ai requisiti PELV.
왘 Collegare la funzione di sicurezza secondo le prescrizioni conte-
nute nel capitolo 5.9 "Funzione di sicurezza STO ("Safe Torque
Off")" a pagina 73.
Collegamento dell'alimentazione
ausiliaria
왘 Assicurarsi che il cablaggio, i cavi e le interfacce collegate siano
conformi ai requisiti PELV.
왘 Posare l'alimentazione ausiliaria da un'unità di alimentazione
(PELV) all'apparecchio.
왘 Realizzare il collegamento a terra dell'uscita negativa sull'unità di
alimentazione.
왘 Se si collegano più apparecchi attenersi alla corrente massima sui
morsetti ammessa
0198441113763, V1.02, 12.2009
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Servoamplificatore AC
115
6 Installazione
LXM32C
6.2.13 Collegamento degli ingressi analogici (CN6.1)
Specifiche dei cavi
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
necessario, collegato a massa
sull'apparecchio, isolato sull'altra
estremità o messo a terra mediante
condensatore (ad es. 10nF)
PELV:
necessario
Struttura dei cavi:
2* 2*0,25 mm2, (2* 2*AWG 22)
Lunghezza massima cavo:
10 m
Particolarità:
LXM32•...
Sezione della connessione
[mm2]
0,2 ... 1,0
(AWG 24 ...
AWG 16)
Lunghezza spellatura
[mm]
10
0198441113763, V1.02, 12.2009
Caratteristiche dei morsetti a molla
CN6
116
Servoamplificatore AC
LXM32C
6 Installazione
Schema di collegamento
CN6 I/O
6.11
6.12
6.13
6.14
6.15
6.16
Al1+ DQCOM Dl0
Al1-
DQ0 Dl1
Al2+
DQ1 Dl2
Al2-
DQ2 Dl3
SHLD
DQ3 Dl4
DICOM DQ4 Dl5
Illustrazione 6.16
6.21
6.22
6.23
6.24
6.25
6.26
6.31
6.32
6.33
6.34
6.35
6.36
Schema di collegamento ingressi analogici
1)
Pin
Segnale
Spiegazione
I/U
6.11
AI1+
Ingresso analogico 1, ±10 I
V, ad es. per il valore nominale della corrente o del
numero di giri
6.12
AI1-
Potenziale di riferimento di I
AI1+, pin 1
6.13
AI2+
Ingresso analogico 2, ±10 I
V, ad es. per la limitazione
della corrente o del numero
di giri
6.14
AI2-
Potenziale di riferimento di I
AI2+, pin 3
6.15
SHLD
Collegamento schermo
6.16
DI_COM
X Potenziale di riferimento di
DI0 ... DI5 su CN6.31 ...
CN6.36
1) Codifica connettore, X=codifica
0198441113763, V1.02, 12.2009
I connettori CN6.1, CN6.2 e CN6.3 sono codificati. In fase
di collegamento accertarsi della corretta assegnazione.
Valori di consegna e limitazioni
Collegamento degli ingressi
analogici
Per l'esercizio è possibile definire la scalatura ±10 V dei valori di consegna analogici e delle limitazioni analogiche; vedere pagina 139.
왘 Collegare gli ingressi digitali a CN6.
왘 Collegare a terra lo schermo sul pin 6.15.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Servoamplificatore AC
117
6 Installazione
LXM32C
6.2.14 Connessione di ingressi/uscite digitali (CN6)
L'apparecchio dispone di ingressi e di uscite configurabili. L'assegnazione standard e l'assegnazione configurabile dipendono dal modo operativo selezionato. Per maggiori informazioni consultare il capitolo 8.4.4
"Impostazione delle uscite e degli ingressi segnale digitali".
Specifiche dei cavi
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
-
Twisted-pair:
-
PELV:
necessario
Struttura dei cavi:
0,25 mm2, (AWG 22)
lunghezza massima cavo
30 m
Particolarità:
Caratteristiche dei morsetti a molla
CN6
LXM32•...
Sezione della connessione
[mm2]
0,2 ... 1,0
(AWG 24 ...
AWG 16)
Lunghezza spellatura
[mm]
10
Schema di collegamento
CN6 I/O
Al1+ DQCOM Dl0
Al1-
DQ0 Dl1
Al2+
DQ1 Dl2
Al2-
DQ2 Dl3
SHLD
DQ3 Dl4
DICOM DQ4 Dl5
6.21
6.22
6.23
6.24
6.25
6.26
6.31
6.32
6.33
6.34
6.35
6.36
Schema di collegamento di ingressi/uscite digitali
0198441113763, V1.02, 12.2009
Illustrazione 6.17
6.11
6.12
6.13
6.14
6.15
6.16
118
Servoamplificatore AC
LXM32C
6 Installazione
1)
Pin
Segnale
Spiegazione
I/U
CN6.21
DQ_COM
Potenziale di riferimento
uscite digitali
CN6.22
DQ0
Uscita digitale 0
U (24 V)
CN6.23
DQ1
Uscita digitale 1
U (24 V)
CN6.24
DQ2
Uscita digitale 2
U (24 V)
CN6.25
DQ3
X Uscita digitale 3
U (24 V)
CN6.26
DQ4
Uscita digitale 4
U (24 V)
1) Codifica connettore, X=codifica
1) Spiegazione
Pin
Segnale
CN6.31
DI0
Ingresso digitale 0
I (24 V)
CN6.32
DI1
Ingresso digitale 1
I (24 V)
CN6.33
DI2
Ingresso digitale 2
I (24 V)
CN6.34
DI3
X Ingresso digitale 3
I (24 V)
CN6.35
DI4
Ingresso digitale 4
I (24 V)
CN6.36
DI5
Ingresso digitale 5
I (24 V)
Segnale
Spiegazione
I/U
DI_COM
Potenziale di riferimento
ingressi digitali: CN6.16
I/U
1) Codifica connettore, X=codifica
Pin
I connettori CN6.1, CN6.2 e CN6.3 sono codificati. In fase
di collegamento accertarsi della corretta assegnazione.
La configurazione e la destinazione standard degli ingressi e delle
uscite è descritta nel capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
왘 Collegare le connessioni digitali a CN6.
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
0198441113763, V1.02, 12.2009
Collegamento di ingressi/uscite
digitali
Servoamplificatore AC
119
6 Installazione
LXM32C
6.2.15 Connessione PC con software di messa in servizio (CN7)
ATTENZIONE
DANNEGGIAMENTO DEL PC
Se si collega direttamente questa interfaccia di messa in servizio del
prodotto con un'interfaccia Gigabit Ethernet del PC, l'interfaccia del
PC può subire danni irreparabili.
•
Non collegare mai un'interfaccia Ethernet direttamente all'interfaccia di messa in servizio del prodotto.
L'inosservanza di questa precauzione può avere come conseguenza danni materiali.
Specifiche dei cavi
Collegamento PC
Per informazioni sui cavi vedere il capitolo 5.2 "Cavi" a pagina 58.
Schermatura:
Necessario, entrambe le estremità
collegate a massa
Twisted-pair:
necessario
PELV:
necessario
Struttura dei cavi:
8*0,25 mm2, (8*AWG 22)
lunghezza massima cavo
100 m
Particolarità:
-
Per la messa in servizio è possibile collegare un PC con software di
messa in servizio. Il PC è collegato mediante un convertitore USB/
RS485 bidirezionale, vedere Accessori a pagina 377.
CN7
CN7
8
1
Illustrazione 6.18
120
8
7
6
5
4
3
2
1
Schema di collegamento PC con software di messa in servizio
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Schema di collegamento
LXM32C
6 Installazione
Pin
Segnale
Spiegazione
I/U
1
riservato
riservati
-
2
riservato
riservati
-
3
riservato
riservati
-
6
riservato
riservati
-
4
MOD_D1
Segnale di trasmissione/ricezione bidirezionale
Livello
RS485
5
MOD_D0
Segnale di trasmissione/ricezione bidirezionale, invertito
Livello
RS485
7
MOD+10V_OUT
Alimentazione 10V, max. 100mA
U
8
MOD_0V
Potenziale di riferimento di MOD+10V_OUT
0198441113763, V1.02, 12.2009
왘 Accertarsi che il connettore sia inserito saldamente nella carcassa.
Servoamplificatore AC
121
6 Installazione
6.3
LXM32C
Controllo dell'installazione
Controllare l'installazione effettuata:
왘 Verificare il fissaggio meccanico dell'intero sistema di azionamento:
•
Le distanze prescritte sono state rispettate?
•
Tutte le viti di fissaggio sono state serrate con la coppia di serraggio
prescritta?
왘 Verificare i collegamenti elettrici e il cablaggio:
•
Tutti i conduttori di protezione siano stati collegati
•
I fusibili hanno tutti il valore corretto e sono tutti del tipo adatto?
•
I cavi attraversati da corrente sono collegati o isolati su entrambi i
lati (nessuna estremità del cavo libera)?
•
Tutti i cavi e i connettori sono stati collegati e posati correttamente?
•
I blocchi meccanici dei connettori sono corretti e funzionanti?
•
Le linee di segnale sono collegate correttamente?
•
Tutti i collegamenti schermati necessari sono stati effettuati
secondo le norme CEM?
•
Sono state adottate tutte le misure CEM?
왘 Verificare che tutte le coperture e le guarnizioni dell'armadio elet-
0198441113763, V1.02, 12.2009
trico siano correttamente montate, in modo tale da raggiungere il
grado di protezione necessario.
122
Servoamplificatore AC
LXM32C
7
7 Messa in servizio
Messa in servizio
7
In questo capitolo viene descritta la messa in servizio del prodotto.
7.1
Informazioni fondamentali
Una panoramica generale dei parametri in ordine
alfabetico è riportata nel capitolo "Parametri". Questo
capitolo descrive dettagliatamente l'uso e la funzione di
alcuni parametri.
@ PERICOLO
SCOSSA ELETTRICA IN CASO DI IMPIEGO ERRATO
La funzione di sicurezza STO (Safe Torque Off) non provoca una separazione elettrica. Il bus DC continua ad essere sotto tensione.
•
Per ottenere la libertà di tensione, disinserire la tensione di rete
con un interruttore adeguato.
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
@ PERICOLO
CONSEGUENZE INVOLONTARIE CAUSATE DAL FUNZIONAMENTO
Quando si avvia l'impianto, gli azionamenti ad esso collegati si trovano normalmente al di fuori del campo visivo dell'utente e non possono essere tenuti direttamente sotto controllo.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
0198441113763, V1.02, 12.2009
Il mancato rispetto di questa precauzioni può provocare ferite
gravi o la morte.
Servoamplificatore AC
123
7 Messa in servizio
LXM32C
@ AVVERTENZA
COMPORTAMENTO IMPREVISTO
Il comportamento del sistema di azionamento è determinato da un cospicuo numero di dati memorizzati o di impostazioni. Impostazioni o
dati non idonei possono provocare movimenti o segnali inaspettati e
disattivare funzioni di monitoraggio.
•
NON attivare il sistema di azionamento senza conoscerne le
impostazioni o i dati.
•
Verificare i dati memorizzati e le impostazioni.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi di errore.
•
Verificare le funzioni in caso di sostituzione del prodotto e dopo
ogni variazione delle impostazioni o dei dati.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
@ AVVERTENZA
MOTORE NON FRENATO
Se si verifica un'interruzione della tensione o un errore che provoca il
disinserimento dello stadio finale, il motore non viene più frenato in
modo controllato con conseguente rischio di danneggiamento.
•
Verificare le condizioni meccaniche.
•
Se necessario, utilizzare un arresto meccanico provvisto di
ammortizzatori o un freno d'arresto idoneo.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
@ AVVERTENZA
MOVIMENTO INASPETTATO
•
Eseguire le prime prove senza carichi collegati.
•
Assicurarsi che nelle immediate vicinanze vi sia un tasto di
ARRESTO DI EMERGENZA funzionante.
•
Tenere presente che potrebbe verificarsi anche un movimento
nella direzione errata o un'oscillazione dell'azionamento.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
124
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Alla prima messa in funzione dell'azionamento è maggiore il rischio di
movimenti inaspettati dovuti a possibili errori di cablaggio o all'impostazione di parametri non adeguati.
LXM32C
7 Messa in servizio
@ ATTENZIONE
SUPERFICI MOLTO CALDE
A seconda delle condizioni di funzionamento, la superficie metallica
del prodotto può raggiungere temperature superiori a 100 °C
(212 °F).
•
Evitare il contatto con le parti metalliche.
•
Non collocare nelle immediate vicinanze componenti infiammabili
o sensibili al calore.
•
Osservare le precauzioni indicate per la dissipazione del calore.
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può avere come conseguenza lesioni fisiche o danni materiali.
Servoamplificatore AC
125
7 Messa in servizio
LXM32C
7.2
Prospetto generale
7.2.1
Singoli passaggi della messa in funzione
I passaggi relativi alla messa in funzione descritti qui di seguito vanno
eseguiti anche quando si desidera utilizzare un apparecchio già configurato dopo aver modificato le condizioni di esercizio.
Operazioni da eseguire
Operazioni da eseguire...
Pagina
Controllo dell'installazione
122
Primo inserimento
130
"Prime regolazioni"
135
Impostazione dei parametri fondamentali e dei valori limite.
135
Impostazione, scalatura, controllo dei segnali analogici
139
Impostazione, controllo dei segnali digitali
141
Controllo dei segnali STO_A e STO_B (anche se non viene
utilizzata la funzione di sicurezza STO)
143
Controllo del freno d'arresto
146
Controllo della direzione di movimento del motore
147
Impostazione dei parametri per encoder
148
Impostazione dei parametri per la resistenza di frenatura
152
Esecuzione dell'Autotuning
154
Ottimizzazione manuale delle impostazioni di regolazione
- Regolatore di velocità
- Regolatore di posizione
160
161
169
Memory card
172
0198441113763, V1.02, 12.2009
Esecuzione di una copia delle impostazioni dell'apparecchio 175
126
Servoamplificatore AC
LXM32C
7.2.2
7 Messa in servizio
Strumenti per la messa in servizio
Panoramica generale
La messa in servizio, la parametrizzazione e la diagnosi possono essere eseguite con i seguenti strumenti:
1
Illustrazione 7.1
(1)
(2)
2
Strumenti per la messa in servizio
HMI integrata
PC con software di messa in servizio
L'accesso a tutti i parametri è possibile soltanto dal
software di messa in servizio.
0198441113763, V1.02, 12.2009
Le impostazioni presenti dell'apparecchio possono essere copiate. Le
impostazioni salvate possono essere importate in un apparecchio dello
stesso tipo. La funzione di copia può essere utilizzata quando più apparecchi devono essere impostati con gli stessi valori, ad esempio in occasione di una loro sostituzione. Ulteriori informazioni sono disponibili a
pagina 175.
Servoamplificatore AC
127
7 Messa in servizio
7.3
LXM32C
HMI integrata
Attraverso l'HMI (Human-Machine-Interface) integrata, l'apparecchio
consente di modificare i parametri e di attivare il modo operativo Jog o
di eseguire un Autotuning. L'interfaccia visualizza inoltre informazioni di
diagnosi (p.es. valori dei parametri o numeri d'errore).
Nei singoli paragrafi dedicati alla messa in servizio e al funzionamento
viene di volta in volta specificato se una funzione può essere eseguita
con l'HMI integrata o se per essa è richiesto l'uso del software di messa
in servizio.
Panoramica generale
1
Fault
Edit
Value
Unit
2
Op
Mon
Conf
ESC
3
4
Illustrazione 7.2
LED di stato
Display di 7 segmenti
Pulsante ESC
Pulsante di navigazione
0198441113763, V1.02, 12.2009
(1)
(2)
(3)
(4)
Elementi di comando dell'HMI integrata
128
Servoamplificatore AC
LXM32C
7.3.1
7 Messa in servizio
Display e comando
Panoramica generale
I LED di stato e un display a 4 posizioni da 7 segmenti permettono di visualizzare lo stato dell'apparecchio, i nomi dei menu, i valori dei parametri, nonché i codici di stato e i numeri d'errore. Ruotando il pulsante
di navigazione è possibile selezionare i livelli di menu e i parametri, nonché aumentare o diminuire i relativi valori. Premendo il pulsante di navigazione, le modifiche vengono confermate.
Con il pulsante ESC (Escape) è possibile abbandonare i parametri e i
menu. Se vengono visualizzati valori, premendo il pulsante ESC si ritorna all'ultimo valore salvato.
Set di caratteri supportati
dall'interfaccia HMI
La tabella che segue illustra l'abbinamento dei caratteri sul display a 4
posizioni da 7 segmenti.
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
A
B
cC D
E
F
G
H
i
J
K
L
M
N
o
P
Q
R
S
T
U
V
W X
Y
Z
1
2
3
4
5
6
7
8
9
0
S
T
u
V
W
X
Y
Z
1
2
3
4
5
6
7
8
9
0
!
?
%
(
)
+
-
_
<
=
>
"
’
^
/
\
°
μ
!
?“ %
(
)
+
-
_
<
=
>
"
`
^
/
\
°
μ
Visualizzazione dello stato
dell'apparecchio
1
Fault
Edit
Value
Unit
3
Op
Mon
2
Conf
(1) Sopra al display a 7 segmenti si trovano quattro LED di stato:
Fault
Edit
Value
Unit
Acceso
rosso
Spiegazione
Stato di funzionamento Fault
Giallo
acceso
Giallo
acceso
Il valore del parametro può essere
modificato
Giallo
acceso
Valore del parametro
Giallo
acceso
Unità del parametro selezionato
0198441113763, V1.02, 12.2009
(2) Tre LED di stato per l'identificazione dei livelli di menu:
LED
Spiegazione
Op
Funzionamento (Operation)
Mon
Monitoraggio (Monitoring)
Conf
Impostazione (Configuration)
(3) LED lampeggianti indicano un'avvertenza, ad es. quando un valore
limite è stato superato.
Servoamplificatore AC
129
7 Messa in servizio
LXM32C
Pulsante di navigazione
Il pulsante di navigazione può essere ruotato o premuto. La pressione
del pulsante può inoltre essere suddivisa in pressione breve (≤1 s) e
pressione prolungata (≥3 s).
Ruotare il pulsante di navigazione per:
•
passare al menu successivo o precedente
•
passare la parametro successivo o precedente
•
aumentare o diminuire i valori
Premere brevemente il pulsante di navigazione per:
•
richiamare il menu selezionato
•
richiamare il parametro selezionato
•
salvare il valore corrente nella memoria EEPROM
Premere a lungo brevemente il pulsante di navigazione per:
Canali di accesso
7.3.2
•
visualizzare una descrizione del parametro selezionato
•
visualizzare l'unità del valore selezionato
È possibile accedere al prodotto tramite diversi canali di accesso. Per
maggiori informazioni, vedere il capitolo 8.1 "Canali di accesso".
Struttura dei menu
Panoramica generale
Fault Edit Value Unit
L'HMI integrata è gestita attraverso menù. La figura che segue fornisce
una panoramica generale del primo livello della struttura dei menu:
Fault Edit Value Unit
Fault Edit Value Unit
Fault Edit Value Unit
ESC
ESC
ESC
Op
Op
Op
Mon
Mon
Mon
Mon
Conf
Conf
Conf
Conf
Op
<1s
<1s
<1s
ESC
<1s
ESC
Fault Edit Value Unit
ESC
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Op
Mon
Mon
Mon
Conf
Conf
Conf
Struttura dei menu HMI
Sul livello di menu immediatamente inferiore al primo si trovano i parametri della voce di menu interessata. Per un facile orientamento, nelle
tabelle dei parametri viene specificato anche il percorso del menu, p.es.
op→jog-.
130
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Illustrazione 7.3
LXM32C
7.3.3
7 Messa in servizio
Esecuzione delle regolazioni
Richiamo dei parametri e
impostazione
Fault Edit Value Unit
La seguente figura mostra a titolo di esempio le modalità di richiamo di
un parametro (secondo livello) e di inserimento (selezione) del relativo
valore (terzo livello).
Fault Edit Value Unit
<1s
Fault Edit Value Unit
<1s
Op
Op
Op
Mon
Mon
Mon
Conf
Conf
ESC
ESC
Conf
ESC
<2s
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Mon
Mon
Conf
Conf
<1s
Illustrazione 7.4
HMI integrata, esempio di impostazione dei parametri
쮿 Il parametro imax (iMax) sarà visualizzato sul display a 7 segmenti,
vedere Illustrazione 7.4.
왘 Premere a lungo il pulsante di navigazione per visualizzare una
descrizione del parametro.
컅 La descrizione del parametro viene visualizzata sul display sotto
forma di testo scorrevole.
왘 Premere brevemente il pulsante di navigazione per visualizzare il
valore momentaneamente impostato nel parametro.
컅 Il LED di stato Value si accende e sul display viene visualizzato il
valore impostato del parametro.
왘 Premere a lungo il pulsante di navigazione per visualizzare l'unità
del valore momentaneamente impostato.
컅 Quando il pulsante di navigazione viene mantenuto premuto, si
accendono i LED di stato Value e Unit. L'unità del valore momentaneamente impostato viene visualizzata sul display. Dopo aver rilasciato il pulsante di navigazione, viene di nuovo visualizzato il
valore momentaneamente impostato e si accende il LED di stato
Value.
왘 Premere brevemente il pulsante di navigazione per accedere alla
modalità Edit, nella quale è possibile modificare il valore dei parametri.
0198441113763, V1.02, 12.2009
컅 I LED di stato Edit e Value si accendono e viene visualizzato il
valore del parametro attualmente valido.
왘 Ruotare il pulsante di navigazione per modificare il valore. L'incre-
mento e il valore limite sono predefiniti per ciascun parametro.
컅 I LED di stato Edit e Value si accendono e il valore selezionato
viene visualizzato
Servoamplificatore AC
131
7 Messa in servizio
LXM32C
왘 Premere brevemente il pulsante di navigazione per salvare il valore
modificato.
Se non si intende salvare il valore modificato, l'operazione può
essere annullata con il pulsante ESC. Sul display viene visualizzato
il valore originale.
컅 Il valore visualizzato lampeggia una volta e il parametro modificato
viene salvato nella EEPROM.
왘 Premere il pulsante ESC per tornare al menu.
Selezione di cosa visualizzare sul
display a 7 segmenti
Nella sua impostazione di default, il display a 4 posizioni da 7 segmenti
mostra lo stato di funzionamento corrente, vedere pagina 181. Con la
voce di menu drc- / supv è possibile selezionare:
•
stat che visualizza di default lo stato di funzionamento corrente
•
vact che visualizza di default la velocità corrente del motore
•
iact che visualizza di default la corrente attuale del motore
Le modifiche vengono acquisite dal sistema soltanto se lo stadio finale
non è attivo.
7.4
Software di messa in servizio
Il software di messa in servizio offre all'utente un'interfaccia grafica e
viene utilizzato per la messa in servizio, la diagnosi e i test delle impostazioni.
•
impostazione dei parametri di anello di controllo in un'interfaccia
grafica
•
ampi strumenti diagnostici per l'ottimizzazione e la manutenzione
•
registrazione sul lungo periodo per la valutazione del funzionamento
•
prova dei segnali di ingresso e di uscita
•
visualizzazione su schermo delle curve dei segnali
•
archiviazione delle impostazioni dell'apparecchio e delle registrazioni con funzioni di esportazione per l'elaborazione dei dati
Per la connessione del PC all'apparecchio vedere a pagina 120.
Il software di messa in servizio offre funzioni di guida che possono essere richiamate con "? - Argomenti di guida" o con il tasto F1.
0198441113763, V1.02, 12.2009
Guida online
132
Servoamplificatore AC
LXM32C
7.5
7 Messa in servizio
Fasi operative per la messa in servizio
@ AVVERTENZA
PERDITA DI CONTROLLO CAUSATA DA VALORI NON IDONEI
Valori non idonei possono causare la disattivazione delle funzioni di
monitoraggio e provocare movimenti o reazioni di segnali inaspettate.
•
Compilare una lista dei parametri necessari per le funzioni utilizzate.
•
Verificare questi parametri prima di mettere in funzione il sistema.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
7.5.1
Primo inserimento
Esecuzione di una copia delle
impostazioni dell'apparecchio
Con una memory card o con il software di messa in servizio è possibile
effettuare una copia delle impostazioni dell'apparecchio. Per maggiori
informazioni consultare il capitolo 7.8 "Esecuzione di una copia delle impostazioni dell'apparecchio" a pagina 175.
Importazione automatica del record
di dati relativi al motore
Quando viene inserito l'apparecchio con encoder collegato a CN3, l'apparecchio legge la targhetta elettronica del motore nell'encoder Hiperface. Il record di dati viene controllato e salvato nella EEPROM.
Il record di dati contiene informazioni tecniche sul motore, quali la coppia nominale e di picco, la corrente e la velocità nominali e il numero di
coppie di poli. Il record di dati non può essere modificato dall'utente.
Senza queste informazioni, l'apparecchio non è pronto per il funzionamento.
Operazioni preliminari
Inserimento dell'apparecchio
Se non si intende effettuare la messa in servizio esclusivamente tramite
l'HMI, è necessario collegare all'apparecchio un PC sul quale sia stato
installato il software di messa in servizio.
쮿 L'alimentazione stadio finale è disinserita.
왘 Inserire l'alimentazione di controllo.
컅 L'apparecchio effettua l'inizializzazione e tutti i segmenti del display
a 7 segmenti e tutti i LED di stato si accendono.
0198441113763, V1.02, 12.2009
Se nell'apparecchio è inserita una memory card, sul display a 7 segmenti viene brevemente visualizzato il messaggio CARD. Viene così segnalato che è stata rilevata una memory card. Se sul display a 7
segmenti rimane costantemente visualizzato il messaggio CARD, significa che sono state riscontrate differenze tra il contenuto della memory
card e i valori dei parametri salvati nell'apparecchio. Per maggiori informazioni consultare il capitolo 7.7 "Memory card" a pagina 172.
Una volta conclusa l'inizializzazione, l'apparecchio è pronto per il funzionamento. A questo punto l'apparecchio si trova nel modo operativo
Jog. Informazioni su come cambiare i modi operativi sono riportate nel
capitolo 8.3 "Modi operativi" a pagina 187.
Servoamplificatore AC
133
7 Messa in servizio
7.5.2
LXM32C
Stato operativo (diagramma di stato)
Dopo l'inserimento l'apparecchio assume una serie di stati operativi finalizzati all'avvio del modo operativo.
Le correlazioni tra gli stati di funzionamento e i cambiamenti di stato
sono illustrate nel diagramma di stato (automa a stati finiti).
Gli stati di funzionamento sono controllati e influenzati a livello interno
dalle funzioni di monitoraggio e di sistema, come ad esempio il monitoraggio della temperatura e della corrente.
Rappresentazione grafica
Il diagramma di stato viene rappresentato graficamente sotto forma di
diagramma di flusso.
Motore senza corrente
Inserimento
1
INIT
Start
nrdy
2
Not Ready
To Switch On
T0
T1
dis
T9
Switch On 3
Disabled
T2
rdy
T15
T7
T12
4
Ready
To Switch On
T10
Son
9
Fault
T3
fLt
5
8888
Switched On
T14
T4
rUn
HALT
fLt
6
Operation
Enabled
T16
Quick Stop Active 7
T13
Stop
HaLt
8
Fault Reaction
Active
T11
8888
Classe di errore 1
Motore riceve corrente
Cambiamento di stato
Illustrazione 7.5
Stati di funzionamento e
cambiamenti di stato
134
Errore
Diagramma di stato
Per informazioni dettagliate sugli stati di funzionamento e i cambiamenti
di stato vedere a pagina 181.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Stato di funzionamento
LXM32C
7.5.3
7 Messa in servizio
Impostazione dei parametri fondamentali e dei valori limite
@ AVVERTENZA
COMPORTAMENTO IMPREVISTO
Il comportamento del sistema di azionamento è determinato da un cospicuo numero di dati memorizzati o di impostazioni. Impostazioni o
dati non idonei possono provocare movimenti o segnali inaspettati e
disattivare funzioni di monitoraggio.
•
NON attivare il sistema di azionamento senza conoscerne le
impostazioni o i dati.
•
Verificare i dati memorizzati e le impostazioni.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi di errore.
•
Verificare le funzioni in caso di sostituzione del prodotto e dopo
ogni variazione delle impostazioni o dei dati.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Compilare una lista dei parametri necessari per le funzioni
utilizzate.
Record di parametri di anello di
controllo
Questo apparecchio consente di lavorare con due record di parametri di
anello di controllo. Durante il funzionamento è possibile passare da un
record di parametri all'altro. La selezione del record parametri regolatore attivo avviene nel parametro CTRL_SelParSet.
0198441113763, V1.02, 12.2009
I parametri si chiamano CTRL1_xx per il primo record parametri regolatore e CTRL2_xx per il secondo record. Qui di seguito verrà utilizzata
la dicitura CTRL1_xx (CTRL2_xx) quando l'impostazione è identica per
entrambi i record parametri regolatore.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
1
Vedere CTRL_PwrUpParSet per la codifica. 2
Le impostazioni modificate vengono acquisite immediatamente.
UINT16
R/W
-
Modbus 4402
-
UINT16
R/-
Modbus 4398
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL_SelParSet
Selezione del record parametri regolatore
(non persistente)
_CTRL_ActParSet Record parametri regolatore attivo
Valore 1: è attivo il record parametri regolatore 1
Valore 2: è attivo il record parametri regolatore 2
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Un record parametri regolatore diventa attivo
allo scadere del tempo impostato per la
commutazione dei parametri
(CTRL_ParChgTime).
Servoamplificatore AC
135
7 Messa in servizio
Nome parametro
Menu HMI
Nome HMI
LXM32C
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
CTRL_ParChgTime Intervallo di tempo per la commutazione del ms
0
record parametri regolatore
0
Durante la commutazione dei parametri ven- 2000
gono modificati gradualmente i valori dei
seguenti parametri:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
- CTRL_TAUiref
- CTRL_KFPp
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4392
Una commutazione dei parametri può
essere provocata dai seguenti eventi:
- Modifica del record parametri regolatore
attivo
- Modifica dell'amplificazione globale
- Modifica di uno dei parametri specificati
sopra
- Disattivazione dell'azione integrale del
regolatore di velocità
Le impostazioni modificate vengono acquisite immediatamente.
Impostazione dei valori limite
Limitazione di corrente
I valori limite devono essere calcolati in base alla strutturazione dell'impianto e ai valori caratteristici del motore. Se il motore viene azionato
senza carichi, non è necessario modificare le impostazioni predefinite.
La corrente massima del motore può essere regolata con il parametro
CTRL_I_max.
La corrente massima del motore per la funzione "Quick Stop" viene limitata con il parametro LIM_I_maxQSTP e quella per la funzione "Halt"
con il parametro LIM_I_maxHalt.
왘 Definire con il parametro CTRL_I_max la corrente massima del
motore.
왘 Definire con il parametro LIM_I_maxQSTP la corrente massima del
motore per la funzione "Quick Stop".
왘 Definire con il parametro LIM_I_maxHalt la corrente massima del
motore per la funzione "Halt".
Sulla base dei dati del motore e dell'apparecchio, il sistema limita la
massima corrente ammessa. Il valore viene limitato anche se nel parametro CTRL_I_max viene impostata una corrente massima eccessivamente alta.
136
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Per le funzioni "Quick Stop" e "Halt", il motore può essere arrestato con
una rampa di decelerazione o con la corrente massima.
LXM32C
7 Messa in servizio
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL_I_max
Limitazione di corrente
ConF → drCiMAX
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
0.00
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- 300.00
tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4376
UINT16
R/W
per.
-
Modbus 4378
Durante il funzionamento, la limitazione di
corrente effettiva (_Imax_actual) è il più piccolo dei seguenti valori:
- CTRL_I_max
- M_I_max
- PA_I_max
- Limitazione di corrente da parte
dell'ingresso analogico
- Limitazione di corrente da parte
dell'ingresso digitale
(rispettivamente il valore più piccolo)
Vengono considerate ulteriori riduzioni della
corrente risultanti dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
LIM_I_maxQSTP
ConF → FLtqcur
Limitazione di corrente per Quick Stop
Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Nel Quick Stop la limitazione di corrente
effettiva (_Imax_actual) corrisponde al più
basso dei seguenti valori:
- LIM_I_maxQSTP
- M_I_max
- PA_I_max
Anche durante un Quick Stop vengono considerate ulteriori riduzioni della corrente
risultanti dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
137
7 Messa in servizio
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
LIM_I_maxHalt
Limitazione di corrente per Halt
ConF → ACGhcur
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4380
Nell'arresto la limitazione di corrente effettiva
(_Imax_actual) corrisponde al più basso dei
seguenti valori:
- LIM_I_maxHalt
- M_I_max
- PA_I_max
Anche durante un arresto vengono considerate ulteriori riduzioni della corrente risultanti
dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
Limitazione di velocità
Con il parametro CTRL_v_max è possibile limitare la velocità massima.
왘 Definire con il parametro CTRL_v_max la velocità massima del
motore.
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL_v_max
Limitazione di velocità
ConF → drC-
usr_v
1
Il valore non deve essere superiore alla velo- 13200
cità massima del motore.
2147483647
Le impostazioni modificate vengono acquisite immediatamente.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 4384
0198441113763, V1.02, 12.2009
nMAX
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
138
Servoamplificatore AC
LXM32C
7.5.4
7 Messa in servizio
Ingressi analogici
I due ingressi analogici si chiamano AI1 e AI2. Qui di seguito verrà utilizzata la dicitura AI1 (AI2) quando l'impostazione è identica per entrambi gli ingressi.
Ingressi analogici
Attraverso gli ingressi analogici si possono rilevare tensioni d'ingresso
tra -10Vdc e +10Vdc. Il valore di tensione momentaneo su AI1+ (AI2+)
può essere letto con il parametro _AI1_act (_AI2_act).
쮿 L'alimentazione dello stadio finale è disinserita.
L'alimentazione ausiliaria è inserita.
왘 Applicare sull'ingresso analogico AI1 (AI2) una tensione
dell'ordine di ±10Vdc.
왘 Controllare con il parametro _AI1_act (_AI2_act) la tensione
applicata.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Analogico 1: valore della tensione d'ingresso mV
-10000
10000
INT16
R/-
Modbus 2306
Analogico 2: valore della tensione d'ingresso mV
-10000
10000
INT16
R/-
Modbus 2314
Nome parametro
Menu HMI
Nome HMI
Descrizione
_AI1_act
Mon
AnA1
_AI2_act
Mon
AnA2
Offset e finestra di tensione zero
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Per la tensione d'ingresso su AI1 (AI2), è possibile definire un offset
con il parametro AI1_offset (AI2_offset) e una finestra di tensione
zero con il parametro AI1_win (AI2_win).
Questa tensione d'ingresso corretta fornisce il valore di tensione per i
modi operativi Profile Torque e Profile Velocity nonché il valore di lettura
del parametro AI1_act (AI1_act).
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_offset
Analogico 1: tensione di offset
ConF → i-o-
0198441113763, V1.02, 12.2009
A1oF
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
mV
-5000
L'ingresso analogico AI1 viene corretto/spo- 0
stato del valore di offset. La finestra di ten- 5000
sione zero eventualmente definita ha effetto
nell'intervallo di passaggio a zero
dell'ingresso analogico corretto AI1.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 2326
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
139
7 Messa in servizio
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI2_offset
Analogico 2: tensione di offset
ConF → i-oA2oF
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 2328
mV
0
0
1000
UINT16
R/W
per.
-
Modbus 2322
mV
0
0
1000
UINT16
R/W
per.
-
Modbus 2324
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
mV
-5000
L'ingresso analogico AI2 viene corretto/spo- 0
stato del valore di offset. La finestra di ten- 5000
sione zero eventualmente definita ha effetto
nell'intervallo di passaggio a zero
dell'ingresso analogico corretto AI2.
Le impostazioni modificate vengono acquisite immediatamente.
AI1_win
Analogico 1: finestra di tensione zero
ConF → i-o-
Valore fino al quale la tensione di ingresso
viene interpretata come 0 V.
Esempio: il valore 20 significa che la fascia
compresa tra -20 ... +20 mV viene interpretata come 0 mV.
A1Wn
Le impostazioni modificate vengono acquisite immediatamente.
AI2_win
Analogico 2: finestra di tensione zero
ConF → i-o-
Valore fino al quale la tensione di ingresso
viene interpretata come 0 V.
Esempio: il valore 20 significa che la fascia
compresa tra -20 ... +20 mV viene interpretata come 0 mV.
A2Wn
Le impostazioni modificate vengono acquisite immediatamente.
2
10 V
3
4
5
1
-10 V
10 V
Illustrazione 7.6
(1)
(2)
(3)
(4)
(5)
140
Offset e finestra di tensione zero
Tensione d'ingresso su AI1 (AI2)
Valore di tensione per i modi operativi Profile Torque e Profile
Velocity nonché valore di lettura del parametro AI1_act
(AI2_act)
Tensione d'ingresso senza elaborazione
Tensione d'ingresso con offset
Tensione d'ingresso con offset e finestra di tensione zero
Servoamplificatore AC
0198441113763, V1.02, 12.2009
-10 V
LXM32C
7.5.5
7 Messa in servizio
Ingressi/uscite digitali
L'apparecchio dispone di ingressi e di uscite configurabili. L'assegnazione standard e l'assegnazione configurabile dipendono dal modo operativo selezionato. Per maggiori informazioni consultare il capitolo 8.4.4
"Impostazione delle uscite e degli ingressi segnale digitali".
Gli stati segnale degli ingressi e delle uscite digitali possono essere visualizzati sull'HMI e visualizzati/modificati con il software di messa in
servizio.
HMI integrata
Con l'HMI integrata è possibile visualizzare gli stati dei segnali, ma non
modificarli.
DI /DQ =1
DI /DQ =0
7
6
Illustrazione 7.7
5
4
3
2
1
0
HMI integrata, stati segnale degli ingressi (DI•) e delle
uscite (DQ•) digitali
Ingressi (parametro _IO_DI_act):
왘 Richiamare la voce di menu -MON / dimo.
컅 Gli ingressi digitali vengono visualizzati in codice bit.
Bit
Segnale
I/U
0
DI0
I
1
DI1
I
2
DI2
I
3
DI3
I
4
DI4
I
5
DI5
I
6
-
-
7
-
-
0198441113763, V1.02, 12.2009
Lo stato degli ingressi della funzione di sicurezza STO non viene visualizzato mediante il parametro _IO_DI_act. Lo stato degli ingressi della
funzione di sicurezza STO viene visualizzato richiamando il parametro
_IO_STO_act.
Servoamplificatore AC
141
7 Messa in servizio
LXM32C
Uscite (parametro _IO_DQ_act):
왘 Richiamare la voce di menu -MON / domo.
컅 Le uscite digitali vengono visualizzate in codice bit.
Bit
Segnale
I/U
0
DQ0
U
1
DQ1
U
2
DQ2
U
3
DQ3
U
4
DQ4
U
5
DQ5
U
6
-
-
7
-
-
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_IO_DI_act
Stato degli ingressi digitali
Destinazione dei bit:
Bit 0: DI0
Bit 1: DI1
Bit 2: DI2
Bit 3: DI3
Bit 4: DI4
Bit 5: DI5
UINT16
R/-
Modbus 2078
Mon
-
-
UINT16
R/-
Modbus 2080
-
UINT16
R/-
Modbus 2124
diMo
_IO_DQ_act
Stato delle uscite digitali
Mon
Destinazione dei bit:
Bit 0: DQ0
Bit 1: DQ1
Bit 2: DQ2
Bit 3: DQ3
Bit 4: DQ4
doMo
_IO_STO_act
Mon
Codifica dei singoli segnali:
Bit 0: STO_A
Bit 1: STO_B
0198441113763, V1.02, 12.2009
Sto
Stato degli ingressi per la funzione di sicurezza STO
142
Servoamplificatore AC
LXM32C
7.5.6
7 Messa in servizio
Controllo della funzione di sicurezza STO
Funzionamento con STO
Se si desidera utilizzare la funzione di sicurezza STO, eseguire le seguenti operazioni:
쮿 L'alimentazione dello stadio finale è disinserita.
L'alimentazione ausiliaria è disinserita.
왘 Controllare se gli ingressi STO_A e STO_B sono separati tra loro.
Tra i due segnali non deve esserci nessun collegamento elettrico.
쮿 L'alimentazione dello stadio finale è inserita.
L'alimentazione ausiliaria è inserita.
왘 Verificare se il parametro IO_AutoEnable per la protezione contro
un riavvio accidentale si trova su "off".
(HMI: conf→acg→ioae).
왘 Avviare il modo operativo Jog (movimento manuale) senza movi-
mento del motore (vedere a pagina 188).
왘 Attivare la funzione di sicurezza. STO_A e STO_B devono essere
disinseriti contemporaneamente.
컅 Lo stadio finale si disinserisce e viene visualizzata la segnalazione
d'errore 1300. (NOTA: la segnalazione d'errore 1301 indica un
errore di cablaggio.)
왘 Verificare il comportamento dell'azionamento in condizioni d'errore.
왘 Registrare tutte le prove delle funzioni di sicurezza nel verbale di
collaudo.
Funzionamento senza STO
Se non si desidera utilizzare la funzione di sicurezza STO:
왘 Controllare se gli ingressi STO_A e STO_B sono collegati con
0198441113763, V1.02, 12.2009
+24VDC.
Servoamplificatore AC
143
7 Messa in servizio
7.5.7
LXM32C
Freno d'arresto
Freno d'arresto
Il freno d'arresto integrato nel motore ha il compito di bloccare il motore
in assenza di alimentazione anche quando una forza esterna è applicata (ad esempio in caso di asse verticale). Il freno d'arresto non rappresenta un dispositivo di sicurezza.
Parametri impostabili
Nella targhetta elettronica del motore sono contenuti il ritardo per il rilascio (apertura) e il ritardo per la chiusura del freno d'arresto. Un ulteriore
ritardo per il rilascio del freno d'arresto (BRK_AddT_release) e un ulteriore ritardo per la chiusura del freno d'arresto (BRK_AddT_apply)
possono essere parametrizzati.
Ritardo per il rilascio del freno
d'arresto
Il ritardo per il rilascio del freno d'arresto salvato nella targhetta elettronica del motore dipende dal tipo di motore.
Un ulteriore ritardo può essere aggiunto mediante il parametro
BRK_AddT_release. Quando sarà passato il tempo corrispondente
all'intero ritardo lo stadio finale sarà abilitato (Operation enable).
1
ENABLE
TORQUE
MOTOR
BRAKE OUT
0
1
0
1
0
OPERATION
ENABLE
1
0
as per nameplate BRK_AddT_release
Illustrazione 7.8
Nome parametro
Menu HMI
Nome HMI
t
Rilascio del freno d'arresto
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
BRK_AddT_releas Ritardo aggiuntivo al rilascio del freno d'arre- ms
0
e
sto
0
Il ritardo totale per il rilascio del freno d'arre- 400
sto corrisponde alla somma tra il ritardo
memorizzato nella targhetta elettronica del
motore e il ritardo aggiuntivo impostato in
questo parametro.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 1294
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
144
Servoamplificatore AC
LXM32C
7 Messa in servizio
Ritardo all'attivazione del freno
d'arresto
La disattivazione dello stadio finale provoca la chiusura del freno d'arresto. Il motore tuttavia continua ad essere alimentato fino al termine del
ritardo all'attivazione del freno d'arresto.
Il ritardo all'attivazione del freno d'arresto salvato nella targhetta elettronica del motore dipende dal tipo di motore.
Un ulteriore ritardo può essere aggiunto mediante il parametro
BRK_AddT_apply. Il motore continua ad essere alimentato finché non
sarà passato il tempo corrispondente all'intero ritardo.
NOTA: l'attivazione della funzione di sicurezza STO annulla il ritardo dei
motori muniti di freno d'arresto. Il motore non può generare una coppia
di mantenimento per coprire il tempo necessario per l'intervento del
freno d'arresto. Verificare se debbano essere adottate misure supplementari; ad esempio nel caso degli assi verticali tale comportamento
può provocare l'abbassamento del carico.
ENABLE
1
0
TORQUE
MOTOR
BRAKE OUT
1
0
1
0
OPERATION 1
ENABLE
0
t
as per nameplate BRK_AddT_apply
Illustrazione 7.9
Attivazione del freno d'arresto
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
BRK_AddT_apply
Ritardo aggiuntivo all'attivazione del freno
d'arresto
ms
0
0
1000
INT16
R/W
per.
-
Modbus 1296
Il ritardo totale per l'attivazione del freno
d'arresto corrisponde alla somma tra il
ritardo memorizzato nella targhetta elettronica del motore e il ritardo aggiuntivo impostato in questo parametro.
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
145
7 Messa in servizio
7.5.7.1
LXM32C
Controllo del freno d'arresto
@ AVVERTENZA
MOVIMENTO INASPETTATO
L'alimentazione di aria al freno d'arresto può provocare un movimento
inaspettato dell'impianto, ad esempio in presenza di assi verticali.
•
Assicurarsi che un'eventuale caduta del carico non possa procurare danni.
•
Eseguire la prova soltanto se non vi sono persone o ostacoli nella
zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Controllo del freno d'arresto
쮿 L'apparecchio si trova nello stato di funzionamento "Ready to
switch on" e i parametri per il freno d'arresto devono essere stati
impostati.
왘 Avviare il modo operativo Jog (HMI: op→JOg→JGST)
컅 Lo stadio finale si attiva e il freno d'arresto viene rilasciato. Sull'HMI
viene visualizzato JG-.
왘 Premere e mantenere premuto il pulsante di navigazione.
컅 Mentre il pulsante di navigazione rimane premuto, il motore effettua
un movimento.
왘 Premere il pulsante ESC.
Il freno d'arresto viene chiuso. Lo stadio finale si disattiva.
0198441113763, V1.02, 12.2009
컅
146
Servoamplificatore AC
LXM32C
7.5.8
7 Messa in servizio
Controllo della direzione di movimento
Direzione di movimento
Un movimento può svolgersi in direzione positiva o negativa.
Nei motori rotativi, la direzione di movimento è definita dalla norma IEC
61800-7-204: per rotazione positiva si intende un movimento dell'albero
motore in senso orario osservando la superficie anteriore dell'albero
motore estratto.
Con un rapporto d'inerzia di "J est."/"J motore" >10,
l'impostazione di base dei parametri del anello di controllo
può rendere instabile la regolazione.
왘 Avviare il modo operativo Jog. (HMI: op→JOg→JGST)
컅 Sull'HMI viene visualizzato JG-.
왘 Movimento in direzione positiva: premere e mantenere premuto il
pulsante di navigazione.
컅 Il motore si muove in direzione positiva.
Sull'HMI viene visualizzato JG-.
왘 Movimento in direzione negativa: ruotare il pulsante di navigazione
sino quando sull'HMI viene visualizzato -JG.
왘 Premere e mantenere premuto il pulsante di navigazione.
컅 Il motore si muove in direzione negativa.
Sull'HMI viene visualizzato -JG.
@ AVVERTENZA
MOVIMENTO INASPETTATO IN CASO DI INVERSIONE DELLE FASI
MOTORE
L'inversione delle fasi del motore ha come conseguenza movimenti
inaspettati con elevata accelerazione.
•
Per invertire la direzione utilizzare, se necessario, il parametro
POSdirOfRotat.
•
Non invertire le fasi motore.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
왘 Se la direzione di movimento prevista non è quella effettiva, correg-
0198441113763, V1.02, 12.2009
gerla con il parametro InvertDirOfMove, vedere a pagina 216.
Servoamplificatore AC
147
7 Messa in servizio
7.5.9
LXM32C
Impostazione dei parametri per encoder
Impostazione di una posizione
assoluta
Durante l'avvio, l'apparecchio legge la posizione assoluta del motore
dall'encoder. Attraverso il parametro _p_absENC è possibile visualizzare la posizione assoluta corrente.
Al inattività del motore è possibile impostare quale nuova posizione assoluta del motore la sua posizione meccanica momentanea attraverso il
parametro ENC1_adjustment. La trasmissione del valore può avvenire indifferentemente con lo stadio finale attivo o disattivato. L'impostazione di una posizione assoluta determina anche un movimento della
posizione dell'impulso di posizione dell'encoder e dell'impulso di posizione della simulazione encoder.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_p_absENC
Posizione assoluta riferita alla corsa utile
dell'encoder
usr_p
-
UINT32
R/-
Modbus 7710
usr_p
-
INT32
R/W
-
Modbus 1324
Questo valore si basa sulla posizione
approssimativa dell'encoder riferita alla sua
corsa utile.
ENC1_adjustment Regolazione della posizione assoluta
dell'encoder 1
La fascia di valori dipende dal tipo di encoder.
Encoder Singleturn:
0 ... max_pos_usr/rev. - 1
Encoder Multiturn:
0 ... (4096 * max_pos_usr/rev.) -1
max_pos_usr/rev.: posizione utente massima per una rotazione completa del motore.
Con la scalatura di default, questo valore è
pari a 16384.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
In caso di sostituzione dell'apparecchio è necessario
verificare la posizione assoluta del motore. In caso di
scostamento o di sostituzione del motore, la posizione
assoluta deve essere corretta.
148
Servoamplificatore AC
0198441113763, V1.02, 12.2009
NOTA:
* Per eseguire la lavorazione con inversione
di direzione, quest'ultima deve essere impostata prima di definire la posizione dell'encoder
* Dopo l'accesso in scrittura è necessario
attendere almeno 1 secondo prima di disinserire l'azionamento.
* Modificando il valore, si determina anche
un movimento della posizione dell'impulso di
posizione virtuale e dell'impulso di posizione
per la simulazione encoder.
LXM32C
7 Messa in servizio
Encoder Singleturn
Impostando una nuova posizione assoluta con l'encoder Singleturn, si
può impostare l'impulso di posizione dell'encoder. Con il valore di posizione 0 si definisce per l'impulso di posizione l'attuale posizione meccanica del motore.
In questo modo cambia anche la posizione dell'impulso di posizione
della simulazione encoder.
Encoder Multiturn
Se, partendo dalla posizione assoluta 0, si sposta il motore rotativo in direzione negativo con l'encoder Multiturn, l'encoder Multiturn rileva un
supero negativo della propria posizione assoluta. La posizione effettiva
dell'azionamento continua invece il conteggio in senso matematico e
fornisce un valore negativo. Dopo il disinserimento e il reinserimento la
posizione effettiva dell'azionamento non corrisponde più al valore di posizione negativo, bensì alla posizione assoluta dell'encoder (una posizione di -10 rotazioni prima del disinserimento diventa la posizione
assoluta dopo 4086 rotazioni dal reinserimento).
Il parametro ShiftEncWorkRang permette di definire se la corsa utile
comprende, come in precedenza, 0...4096 rotazioni o se comprende invece -2048...+2048 rotazioni.
0198441113763, V1.02, 12.2009
ShiftEncWorkRang = 0: la corsa utile viene definita da 0 ... 4096 rotazioni.
ShiftEncWorkRang = 1: la corsa utile viene definita da -2048 ... 2048
rotazioni. In una tipica applicazione con movimento positivo e negativo,
la corsa utile del motore rientra nella fascia stabile dell'encoder.
Servoamplificatore AC
149
7 Messa in servizio
LXM32C
ShiftEncWorkRang=0
Encoder position
Drive position
4096
4096
0
mechanical position
ShiftEncWorkRang=1
Encoder position
Drive position
2048
-2048
2048
0
-2048
mechanical position
Illustrazione 7.10
Valori di posizione encoder Multiturn
왘 Impostare la posizione assoluta sul limite meccanico specificando
un valore di posizione >0.
0198441113763, V1.02, 12.2009
In questo modo, la corsa utile meccanica rientra nella fascia
costante dell'encoder.
150
Servoamplificatore AC
LXM32C
7 Messa in servizio
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ShiftEncWorkRang
Movimento della corsa utile dell'encoder
0
0
1
UINT16
R/W
per.
-
Modbus 1346
0 / Off: movimento off
1 / On: movimento on
valore 0:
i valori di posizione si trovano tra 0 ... 4096
rotazioni.
valore 1:
i valori di posizione si trovano tra -2048 ...
2048 rotazioni.
Dopo aver attivato la funzione di movimento,
la corsa utile dell'encoder viene spostata di
metà della fascia.
Esempio per la corsa utile di un encoder
Multiturn con 4096 rotazioni.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
151
7 Messa in servizio
LXM32C
7.5.10 Impostazione dei parametri per la resistenza di frenatura
@ AVVERTENZA
MOTORE NON FRENATO
Una resistenza di frenatura insufficiente produce sovratensioni sul
bus DC e determina il disinserimento dello stadio finale. La conseguenza è che il motore non viene più frenato attivamente.
•
Verificare il dimensionamento della resistenza di frenatura.
•
Verificare l'impostazione dei parametri della resistenza di frenatura.
•
Con dei funzionamenti di prova, controllare il valore I2t nelle condizioni più critiche. Con un valore I2t del 100%, l'apparecchio si
disinserisce.
•
Durante i calcoli e i test, tenere presente che in caso di una tensione di rete più alta, nei condensatori del bus DC può essere
immagazzinata meno energia di frenata.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
@ AVVERTENZA
SUPERFICI MOLTO CALDE
A seconda delle condizioni di esercizio, la resistenza di frenatura può
raggiungere temperature superiori ai 250°C (482°F).
•
Evitare il contatto diretto con la resistenza di frenatura.
•
Non collocare componenti infiammabili o sensibili al calore nelle
immediate vicinanze della resistenza di frenatura.
•
Provvedere ad un'adeguata asportazione del calore.
•
Nei casi più critici, controllare la temperatura della resistenza di
frenatura con un ciclo di funzionamento di prova.
Ulteriori informazioni sul tema resistenza di frenatura
Pagina
Dati tecnici resistenza di frenatura
42
Dimensionamento della resistenza di frenatura
66
Montaggio della resistenza di frenatura esterna
85
Installazione elettrica della resistenza di frenatura
99
Dati per l'ordinazione di resistenze di frenatura esterne
377
왘 Controllare il parametro RESint_ext. Se è collegata una resi-
stenza di frenatura esterna, il parametro deve essere impostato su
"external".
왘 Quando è collegata una resistenza di frenatura esterna (valore del
parametro RESint_ext su "external"), è necessario impostare i
relativi valori nei parametri RESext_P, RESext_R e RESext_ton.
Accertarsi che la resistenza selezionata sia anche collegata.
152
Servoamplificatore AC
0198441113763, V1.02, 12.2009
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
LXM32C
7 Messa in servizio
왘 Verificare il corretto funzionamento della resistenza di frenatura in
condizioni realistiche e nelle situazioni più critiche.
Se la potenza rialimentata è superiore a quella che può accettare la resistenza di frenatura, viene visualizzata una segnalazione d'errore e lo
stadio finale si disattiva.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1298
W
1
10
32767
UINT16
R/W
per.
-
Modbus 1316
Valore di resistenza della resistenza di frena- Ω
tura esterna
100.00
Il valore minimo dipende dallo stadio finale. 327.67
In passi di 0,01 Ω.
UINT16
R/W
per.
-
Modbus 1318
UINT16
R/W
per.
-
Modbus 1314
Nome parametro
Menu HMI
Nome HMI
Descrizione
RESint_ext
Scelta della resistenza di frenatura interna o 0
esterna
0
0 / Internal Braking Resistor / int: resi- 1
stenza di frenatura interna
1 / External Braking Resistor / Eht: resistenza di frenatura esterna
ConF → ACGEibr
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RESext_P
ConF → ACGPobr
Potenza nominale della resistenza di frenatura esterna
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RESext_R
ConF → ACGrbr
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RESext_ton
ConF → ACGtbr
Tempo di inserzione max. ammesso della
resistenza di frenatura esterna
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ms
1
1
30000
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
153
7 Messa in servizio
LXM32C
7.5.11 Esecuzione dell'Autotuning
L'Autotuning può essere effettuato in tre diversi modi:
Autotuning
•
Easy Tuning: Automatico - L'Autotuning viene eseguito senza interventi dell'utente. La correzione automatica del regolatore fornisce
un risultato soddisfacente e molto dinamico per la maggior parte
delle applicazioni.
•
Comfort Tuning: Semiautomatico - La correzione automatica del
regolatore viene eseguita con il supporto dell'utente. I parametri per
la direzione o lo smorzamento possono essere predefiniti
dall'utente.
•
Manuale: Attraverso i relativi parametri, l'utente può impostare/correggere i valori del regolatore. Modalità per esperti.
L'Autotuning determina la coppia di frizione, sotto forma di coppia del
carico costantemente attiva, e ne tiene conto nel calcolo del momento di
inerzia dell'intero sistema.
Vengono inoltre considerati i fattori esterni, come un eventuale carico
sul motore. L'Autotuning permette di ottimizzare i parametri di impostazione del regolatore, vedere il capitolo 7.6 "Ottimizzazione del regolatore con risposta al gradino".
L'Autotuning supporta anche i comuni assi verticali.
@ AVVERTENZA
MOVIMENTO INASPETTATO
L'Autotuning mette in movimento il motore per impostare la regolazione dell'azionamento. L'impostazione di parametri errati può provocare movimenti inaspettati o mettere fuori uso le funzioni di
monitoraggio.
•
Controllare i parametri AT_dir e AT_dis. Occorre inoltre considerare la corsa per la rampa di decelerazione in caso d'errore.
•
Controllare se il parametro LIM_I_maxQSTP per Quick Stop è
impostato correttamente.
•
Se possibile, utilizzare gli interruttori di finecorsa.
•
Assicurarsi che nelle immediate vicinanze vi sia un tasto di
ARRESTO DI EMERGENZA funzionante.
•
Prima di avviare la funzione, accertarsi che l'impianto sia libero e
pronto ad eseguire il movimento.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Se si desidera effettuare un Easy-Tuning, non è necessario impostare
ulteriori parametri. Se si desidera effettuare un Comfort-Tuning, impostare i parametri AT_dir, AT_dis e AT_mechanics in funzione
dell'impianto.
154
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Durante l'Autotuning il motore viene attivato ed eseguiti piccoli movimenti. Lo sviluppo di rumori e l'oscillazione meccanica dell'impianto
sono normali.
LXM32C
7 Messa in servizio
La selezione tra Easy-Tuning e Comfort-Tuning viene fatta con il parametro AT_Start. L'Autotuning si avvia con la scrittura del valore.
왘 Avviare l'Autotuning con il software di messa in servizio.
In alternativa è possibile avviare l'autotuning anche tramite l'HMI.
HMI: op→tun→tust
왘 Salvare i nuovi valori tramite il software di messa in servizio
nell'EEPROM.
Se l'Autotuning è stato avviato tramite l'HMI premere il pulsante di
navigazione per salvare i nuovi valori nell'EEPROM.
Se l'Autotuning si interrompe con un messaggio d'errore, vengono acquisiti i valori di default. In tal caso, modificare la posizione meccanica e
avviare di nuovo l'Autotuning. Per verificare la plausibilità dei valori calcolati è possibile richiederne la visualizzazione, vedere anche il capitolo
7.5.12 "Impostazioni avanzate per l'Autotuning" a pagina 157.
Nome parametro
Menu HMI
Nome HMI
Descrizione
AT_dir
1
1 / Positive Negative Home / Pnh: prima in 1
direzione positiva, poi in quella negativa con 6
ritorno alla posizione di riposo
2 / Negative Positive Home / nPh: prima in
direzione negativa, poi in quella positiva con
ritorno alla posizione di riposo
3 / Positive Home / P-h: solo in direzione
positiva con ritorno alla posizione di riposo
4 / Positive / P--: solo in direzione positiva
senza ritorno alla posizione di riposo
5 / Negative Home / n-h: solo in direzione
negativa con ritorno alla posizione di riposo
6 / Negative / n--: solo in direzione negativa
senza ritorno alla posizione di riposo
oP → tunStiM
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Direzione di movimento per Autotuning
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
-
Modbus 12040
UINT32
R/W
-
Modbus 12038
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
AT_dis
Campo di movimento Autotuning
oP → tun-
Campo entro il quale viene eseguita la procedura automatica di ottimizzazione dei
parametri di anello di controllo. Va specificato il campo relativo alla posizione attuale.
NOTA: Con "Movimento in una sola direzione" (parametro AT_dir), il campo indicato
viene utilizzato per ogni passo di ottimizzazione. Il movimento effettivo corrisponde
generalmente a 20 volte il valore, ma non è
tuttavia limitato.
0198441113763, V1.02, 12.2009
diSt
Giro
1.0
2.0
999.9
In passi di 0,1 giri
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Servoamplificatore AC
155
7 Messa in servizio
Nome parametro
Menu HMI
Nome HMI
Descrizione
AT_mechanical
Tipo di accoppiamento del sistema
LXM32C
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
1
1 / Direct Coupling: accoppiamento diretto 2
2 / Belt Axis: asse con cinghia
3
3 / Spindle Axis: asse a vite
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
-
Modbus 12060
UINT16
R/W
-
Modbus 12034
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
AT_start
Avvio Autotuning
Valore 0: Fine
Valore 1: Attiva EasyTuning
Valore 2: Attiva ComfortTuning
0
2
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
156
Servoamplificatore AC
LXM32C
7 Messa in servizio
7.5.12 Impostazioni avanzate per l'Autotuning
Con i parametri di seguito riportati è possibile monitorare o influenzare
l'Autotuning.
Con i parametri AT_state e AT_progress è possibile tenere sotto
controllo l'avanzamento percentuale e lo stato dell'Autotuning.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Destinazione dei bit:
Bit 0 ... 10: ultimo passaggio di elaborazione Bit 13: auto_tune_process
Bit 14: auto_tune_end
Bit 15: auto_tune_err
UINT16
R/-
Modbus 12036
Avanzamento Autotuning
UINT16
R/-
Modbus 12054
Nome parametro
Menu HMI
Nome HMI
Descrizione
_AT_state
Stato Autotuning
_AT_progress
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
%
0
0
100
Per verificare con un ciclo di funzionamento di prova le ripercussioni sul
sistema di un'impostazione più rigida o più morbida dei parametri di
anello di controllo, è possibile modificare le impostazioni definite con
l'Autotuning scrivendo il parametro AT_gain. Generalmente non è possibile raggiungere un valore del 100%, poiché tale valore coincide con il
limite di stabilità. Di norma il valore calcolato è pari al 70% - 80%.
Con il parametro AT_J è possibile leggere il momento d'inerzia dell'intero sistema calcolato con l'Autotuning.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_AT_M_friction
Coppia di frizione del sistema
Arms
-
UINT16
R/-
Modbus 12046
Arms
-
INT16
R/-
Modbus 12048
kg cm2
0.1
0.1
6553.5
UINT16
R/per.
-
Modbus 12056
Il valore viene rilevato durante l'Autotuning.
In passi di 0,01 Arms.
_AT_M_load
Coppia costante del carico
Il valore viene rilevato durante l'Autotuning.
In passi di 0,01 Arms.
_AT_J
Momento d'inerzia dell'intero sistema
0198441113763, V1.02, 12.2009
Il valore viene calcolato automaticamente
durante l'Autotuning.
In passi di 0,1 kg cm2.
Servoamplificatore AC
157
7 Messa in servizio
LXM32C
Modificando il parametro AT_wait è possibile impostare un tempo d'attesa tra le singole fasi del processo di Autotuning. La definizione di un
tempo d'attesa ha senso solo quando l'accoppiamento è poco rigido, in
particolare quando la fase successiva del processo automatico di Autotuning (variazione della rigidità) ha inizio già durante lo smorzamento
del sistema.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
AT_wait
Tempo d'attesa tra le fasi di Autotuning
ms
300
500
10000
UINT16
R/W
-
Modbus 12050
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
158
Servoamplificatore AC
LXM32C
7 Messa in servizio
7.6
Ottimizzazione del regolatore con risposta al gradino
7.6.1
Struttura del regolatore
La struttura del regolatore del controllore corrisponde alla classica regolazione in cascata di un anello di controllo con regolatore di corrente,
regolazione di velocità e regolatore di posizione. Inoltre la grandezza pilota del regolatore di velocità può essere livellata attraverso un filtro inserito a monte.
I regolatori vengono impostati uno dopo l'altro dall'"interno" verso
l'"esterno" nell'ordine regolazione di corrente, regolazione di velocità,
regolazione di posizione. L'anello di regolazione di livello gerarchico superiore rimane di volta in volta disinserito.
1
2
3
P V C
A
B
C
_Iq_act_rms, _Id_act_rms
M
3~
_v_act, _n_act
_p_act, _p_actInt
Illustrazione 7.11
(1)
(2)
(3)
(4)
4
E
Struttura del regolatore
Regolatore di posizione
Regolatore di velocità
Regolatore di corrente
Valutazione encoder
La rappresentazione dettagliata della struttura del regolatore è reperibile nel capitolo 8.4.5 "Impostazione dei parametro dell'anello di controllo".
Il regolatore di corrente determina la coppia motrice del motore. Con i
dati motore memorizzati il regolatore di corrente viene impostato in
modo ottimale.
0198441113763, V1.02, 12.2009
Regolatore di corrente
Servoamplificatore AC
159
7 Messa in servizio
Regolatore di velocità
Regolatore di posizione
LXM32C
Il regolatore di velocità regola la velocità del motore variando la corrente
del motore in funzione del carico. Esso determina la rapidità di reazione
dell'azionamento. La dinamica del regolatore di velocità dipende da:
•
Momento d'inerzia dell'azionamento e del sistema regolato
•
potenza del motore
•
Rigidità ed elasticità degli elementi nel flusso di forza
•
gioco degli elementi meccanici di azionamento
•
Attrito
Il regolatore di posizione riduce la differenza tra il valore di consegna di
posizione e la posizione effettiva (errore di posizionamento) mantenendola sul valore minimo. Se il regolatore di posizione è stato impostato
correttamente, a motore fermo l'errore di posizionamento è prossimo
allo zero.
La condizione preliminare per una buona amplificazione del regolatore
di posizione è un circuito di regolazione della velocità ottimizzato.
7.6.2
Ottimizzazione
La funzione di ottimizzazione dell'azionamento serve a tarare l'apparecchio in funzione delle condizioni d'impiego. Sono previste le seguenti
possibilità:
Impostazione dei segnali di guida
•
Selezione degli anelli di controllo. Gli anelli di controllo di livello
gerarchico superiore vengono disinseriti automaticamente.
•
Definizione dei segnali di guida: forma del segnale, altezza, frequenza e punto iniziale
•
Prova della reazione alla regolazione con il generatore di segnale.
•
Registrazione e valutazione a video della reazione alla regolazione
mediante il software di messa in servizio.
왘 Avviare l'ottimizzazione del regolatore con il software di messa in
servizio.
왘 Impostare i seguenti valori per il segnale di guida:
•
Forma del segnale: Salto "positivo"
•
Ampiezza: 100 1/min
•
Durata periodo: 100 ms
•
Numero di ripetizioni: 1
왘 Avviare la registrazione.
Inserimento dei valori del regolatore
Per i singoli passaggi di ottimizzazione descritti nelle pagine che seguono, i parametri di anello di controllo devono essere inseriti e provati
attraverso il lancio di una funzione gradino.
La funzione gradino si attiva non appena l'utente avvia una registrazione
nel software di messa in servizio.
I valori di regolazione per l'ottimizzazione si inseriscono nella finestra
dei parametri del gruppo "Control”.
160
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Solo con le forme di segnale "Salto" e "Rettangolo" si può
riconoscere il comportamento dinamico complessivo di un
anello di controllo. I segnali illustrati nel manuale hanno la
forma "Salto".
LXM32C
7 Messa in servizio
Record di parametri di anello di
controllo
Questo apparecchio consente di lavorare con due record di parametri di
anello di controllo. Durante il funzionamento è possibile passare da un
record di parametri all'altro. La selezione del record parametri regolatore attivo avviene nel parametro CTRL_SelParSet.
I parametri si chiamano CTRL1_xx per il primo record parametri regolatore e CTRL2_xx per il secondo record. Qui di seguito verrà utilizzata
la dicitura CTRL1_xx (CTRL2_xx) quando l'impostazione è identica per
entrambi i record parametri regolatore.
7.6.3
Ottimizzazione del regolatore di velocità
L'impostazione ottimale di sistemi di regolazione meccanici complessi
presuppone un esperienza nell'esecuzione di procedimenti di messa a
punto delle tecnologie di regolazione. Tra questi si annovera il calcolo
dei parametri di anello di controllo e l'utilizzo di procedure di identificazione.
L'ottimizzazione dei sistemi meccanici meno complessi può essere generalmente eseguita con risultati positivi procedendo in modo sperimentale con il metodo del caso limite aperiodico. Vengono impostati i
seguenti parametri:
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_KPn
Coefficiente di proporzionalità (P) del regola- A/min-1
tore di velocità
0.0001
Il valore di default viene ricavato dai parame- 1.2700
tri motore
ConF → drCPn1
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4610
UINT16
R/W
per.
-
Modbus 4866
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPn
ConF → drCPn2
Coefficiente di proporzionalità (P) del regola- A/min-1
tore di velocità
0.0001
Il valore di default viene ricavato dai parame- 1.2700
tri motore
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
161
7 Messa in servizio
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_TNn
Tempo di regolazione del regolatore di velo- ms
cità
0.00
Il valore di default viene calcolato da
327.67
CTRL_TAUiref.
ConF → drCtin1
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4612
UINT16
R/W
per.
-
Modbus 4868
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_TNn
ConF → drCtin2
Tempo di regolazione del regolatore di velo- ms
cità
0.00
Il valore di default viene calcolato da
327.67
CTRL_TAUiref.
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
Controllare e ottimizzare in una seconda fase i valori rilevati, come descritto a pagina 168.
162
Servoamplificatore AC
LXM32C
Determinazione della catena
motrice
7 Messa in servizio
Per valutare ed ottimizzare il comportamento transitorio, raggruppare la
catena motrice in uno dei due seguenti sistemi.
•
Sistema con meccanica rigida
•
Sistema con meccanica poco rigida
Meccanica rigida
Meccanica meno rigida
poca elasticità
maggiore elasticità
poco gioco
molto gioco
p. es. Azionamento diretto
Accoppiamento rigido
p. es. Trasmissione a cinghia
Albero motore debole
Accoppiamento elastico
Illustrazione 7.12
Sistemi con meccanica rigida e meno rigida
왘 Accoppiare il motore con la meccanica dell'impianto.
왘 Se si utilizzano interruttori di finecorsa, verificarne il corretto funzio-
0198441113763, V1.02, 12.2009
namento dopo il montaggio del motore.
Servoamplificatore AC
163
7 Messa in servizio
Disinserimento del filtro di
grandezza pilota del regolatore di
velocità
LXM32C
Se la regolazione della velocità è ottimizzata, con il filtro di grandezza pilota del regolatore di velocità è possibile migliorare la reazione ad un
processo transitorio. Per le prime impostazioni del regolatore di velocità,
il filtro di grandezza pilota deve essere disinserito.
왘 Disattivare il filtro di grandezza pilota del regolatore di velocità.
Impostare il parametro CTRL1_TAUnref ( CTRL2_TAUnref) sul
valore limite inferiore "0".
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_TAUnref
Costante tempo filtrazione per il filtro del
valore di consegna della velocità
ConF → drCtAu1
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
ms
0.00
9.00
Il valore di questo parametro viene commu- 327.67
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4616
UINT16
R/W
per.
-
Modbus 4872
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_TAUnref
ConF → drCtAu2
ms
0.00
9.00
Il valore di questo parametro viene commu- 327.67
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
Costante tempo filtrazione per il filtro del
valore di consegna della velocità
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
La procedura di ottimizzazione delle impostazioni qui
descritta vuole essere esclusivamente uno strumento di
supporto per l'utente, al quale spetta comunque la
responsabilità di verificare che il metodo proposto sia
adatto per l'applicazione specifica.
Determinazione dei valori del
regolatore con meccanica rigida
Con meccanica rigida, l'impostazione della reazione alla regolazione
può avvenire in base alla tabella, se:
•
il momento d'inerzia del carico e del motore sono noti
•
il momento d'inerzia del carico e del motore sono costanti.
•
JL: momento d'inerzia del carico
•
JM: momento d'inerzia del motore
왘 Determinare i valori del regolatore sulla base di Tabella 7.1:
164
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Il coefficiente P CTRL_KPn e il tempo di regolazione CTRL_TNn dipendono da:
LXM32C
7 Messa in servizio
JL=JM
2
JL=5 * JM
JL=10 * JM
JL[kgcm ]
KPn
TNn
KPn
TNn
KPn
TNn
1
0,0125
8
0,008
12
0,007
16
2
0,0250
8
0,015
12
0,014
16
5
0,0625
8
0,038
12
0,034
16
10
0,125
8
0,075
12
0,069
16
20
0,25
8
0,15
12
0,138
16
Tabella 7.1 Determinazione dei valori del regolatore
Determinazione dei valori del
regolatore con meccanica meno
rigida
Per eseguire l'ottimizzazione, si determina il coefficiente P del regolatore di velocità con il quale la regolazione della velocità _v_act ha
luogo nel minor tempo possibile senza sovraelongazione.
왘 Impostare il tempo di regolazione CTRL1_TNn (CTRL2_TNn) su infi-
nito (= 327,67 ms)
Se sul motore fermo agisce una coppia di carico, il tempo di regolazione
deve essere impostato su un valore non eccessivamente alto, in modo
tale che non si verifichi alcuna variazione incontrollata della posizione
del motore.
Se il motore viene caricato da fermo, il tempo di
regolazione può causare "infinite" errori di posizionamento
(assi verticali). Ridurre il tempo di regolazione se queste
variazioni non possono essere accettate dall'applicazione.
La riduzione del tempo di regolazione può ripercuotersi
negativamente sul risultato dell'ottimizzazione.
@ AVVERTENZA
MOVIMENTO INASPETTATO
La funzione gradino mantiene il motore a velocità costante fino allo
scadere del tempo predefinito.
•
Verificare che i valori scelti per la velocità e il tempo non superino
la corsa disponibile.
•
Se possibile, utilizzare anche un interruttore di finecorsa.
•
Assicurarsi che nelle immediate vicinanze vi sia un tasto di
ARRESTO DI EMERGENZA funzionante.
•
Prima di avviare la funzione, accertarsi che l'impianto sia libero e
pronto ad eseguire il movimento.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
0198441113763, V1.02, 12.2009
왘 Lanciare una funzione gradino.
왘 Dopo la prima prova, controllare l'ampiezza massima del valore di
corrente nominale _Iq_ref.
Servoamplificatore AC
165
7 Messa in servizio
LXM32C
Impostare l'ampiezza della grandezza pilota su un valore non eccessivamente alto, in modo che il valore di corrente nominale _Iq_ref si
mantenga al di sotto del valore massimo CTRL_I_max. Il valore scelto
non deve tuttavia essere troppo basso, per evitare che il comportamento
dell'anello di regolazione sia influenzato dai fenomeni di attrito della
meccanica.
왘 Se è stato necessario modificare _v_ref, lanciare di nuovo una
funzione gradino e controllare l'ampiezza di _Iq_ref.
왘 Aumentare o ridurre il coefficiente P a piccoli passi finché _v_act
esegue la regolazione nel minor tempo possibile. La figura
seguente mostra a sinistra il comportamento del transitorio desiderato. Come illustrato a destra, le sovraelongazione si riducono diminuendo il valore CTRL1_KPn (CTRL2_KPn).
_v_ref e _v_act risultano differenti se CTRL1_TNn (CTRL2_TNn)
viene impostato su "infinito".
Ampiezza
_v_ref
100%
_v_act
_v_ref
100%
_v_act
63%
Migliorare con
KPn
0%
0%
TNn
t
Illustrazione 7.13
t
Determinazione di “TNn” con il caso limite aperiodico
Nei sistemi di azionamento in cui si verificano oscillazioni
prima che venga raggiunto il caso limite aperiodico, il
coefficiente P o "KPn" deve essere diminuito fino a quando
le oscillazioni non sono più riconoscibili. Questo caso si
presenta spesso negli assi lineari con azionamento a
cinghia dentata.
Determinare graficamente il punto in cui la velocità effettiva _v_act raggiunge il 63% del valore finale. Il tempo di regolazione CTRL1_TNn
(CTRL2_TNn) si ricava dal valore sull'asse dei tempi. Il software di
messa in servizio assiste l'utente nella valutazione.
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_TAUiref
Costante tempo filtrazione per il filtro del
valore di corrente nominale
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
ms
0.00
0.50
Il valore di questo parametro viene commu- 4.00
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4618
0198441113763, V1.02, 12.2009
Rilevamento grafico del valore 63%
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
166
Servoamplificatore AC
LXM32C
7 Messa in servizio
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL2_TAUiref
Costante tempo filtrazione per il filtro del
valore di corrente nominale
ms
0.00
0.50
4.00
UINT16
R/W
per.
-
Modbus 4874
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
167
7 Messa in servizio
7.6.4
LXM32C
Controllo ed ottimizzazione delle impostazioni preliminari
100%
100%
_v_act
_v_act
Ampiezza
_v_ref
Ampiezza
_v_ref
Meccanica
meno rigida
Meccanica
rigida
0%
0%
t
Illustrazione 7.14
t
Risposte al gradino con buona reazione alla regolazione
Il regolatore è ben impostato se la risposta al gradino corrisponde all'incirca all'andamento del segnale rappresentato. Sono caratteristiche distintive di una buona reazione alla regolazione:
•
transitorio rapido
•
sovraelongazione fino ad un massimo del 40%; valore raccomandato 20%.
Se la reazione alla regolazione non corrisponde all'andamento rappresentato, modificare CTRL_KPn in passi del 10% circa e lanciare di nuovo
una funzione gradino:
•
Se la regolazione è troppo lenta: incrementare CTRL1_KPn
(CTRL2_KPn).
•
Se la regolazione tende ad oscillare: scegliere un valore più basso
per CTRL1_KPn (CTRL2_KPn).
Un comportamento oscillante si riconosce dalle continue accelerazioni
e decelerazioni del motore.
100%
100%
_v_act
Troppo lento
Oszillazioni
_v_ref
Ampiezza
_v_act
Migliorare con
KPn
Migliorare con
KPn
0%
0%
t
Illustrazione 7.15
t
Ottimizzazione delle impostazioni inadeguate del regolatore di velocità
Se nonostante l'ottimizzazione non si ottengono
prestazioni sufficientemente buone del regolatore,
rivolgersi al proprio rappresentante locale.
168
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Ampiezza
_v_ref
LXM32C
7.6.5
7 Messa in servizio
Ottimizzazione del regolatore di posizione
La condizione preliminare per l'ottimizzazione è una buona dinamica di
regolazione dell'anello di regolazione della velocità di livello gerarchico
inferiore.
Durante l'impostazione del controllo di posizione è necessario ottimizzare il coefficiente P del regolatore di posizione CTRL1_KPp
(CTRL2_KPp) entro due limiti:
•
CTRL1_KPp (CTRL2_KPp) troppo alto: sovraelongazione della
meccanica, instabilità del sistema di regolazione
•
CTRL1_KPp (CTRL2_KPp) troppo basso: grande distanza d'inseguimento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL1_KPp
Coefficiente P del regolatore di posizione
Il valore di default viene calcolato
UINT16
R/W
per.
-
Modbus 4614
ConF → drC-
1/s
2.0
900.0
1/s
2.0
900.0
UINT16
R/W
per.
-
Modbus 4870
PP1
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPp
Coefficiente P del regolatore di posizione
ConF → drC-
Il valore di default viene calcolato
PP2
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
@ AVVERTENZA
MOVIMENTO INASPETTATO
0198441113763, V1.02, 12.2009
La funzione gradino mantiene il motore a velocità costante fino allo
scadere del tempo predefinito.
•
Verificare che i valori scelti per la velocità e il tempo non superino
la corsa disponibile.
•
Se possibile, utilizzare anche un interruttore di finecorsa.
•
Assicurarsi che nelle immediate vicinanze vi sia un tasto di
ARRESTO DI EMERGENZA funzionante.
•
Prima di avviare la funzione, accertarsi che l'impianto sia libero e
pronto ad eseguire il movimento.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Servoamplificatore AC
169
7 Messa in servizio
LXM32C
impostazione del segnale di guida
왘 Selezionare nel software di messa in servizio la grandezza pilota
del regolatore di posizione.
왘 Impostare il segnale di guida:
•
Forma del segnale: "Salto"
•
Per motori rotativi: impostare l'ampiezza per circa 1/10 di rotazione
del motore.
L'ampiezza va specificata in unità utente. Con la scalatura di default la
risoluzione è di 16384 usr per rotazione del motore.
Selezione dei segnali di
registrazione
왘 Selezionare in Parametri di registrazione generali i valori:
•
Valore di consegna di posizione del regolatore di posizione
_p_refusr (_p_ref)
•
Posizione effettiva del regolatore di posizione _p_actusr
(_p_act)
•
Velocità effettiva _v_act
•
Corrente attuale del motore _Iq_ref
I valori di regolazione del regolatore di posizione si modificano nello
stesso gruppo di parametri utilizzato per il regolatore di velocità.
Ottimizzazione del valore del
regolatore di posizione
왘 Lanciare una funzione gradino con i valori di regolazione predefiniti.
왘 Dopo la prima prova, verificare i valori _n_act e _Iq_ref ottenuti
per la regolazione della corrente e della velocità. I valori non
devono raggiungere la fascia di limitazione della corrente e della
velocità.
100%
Ampiezza
Ampiezza
100%
p_ref
p_act
p_ref
p_act
Meccanica
meno rigida
Meccanica
rigida
0%
0%
t
Illustrazione 7.16
t
Risposte al gradino del regolatore di posizione con buona
reazione alla regolazione
Se la reazione alla regolazione non corrisponde all'andamento rappresentato, modificare il coefficiente P CTRL1_KPp (CTRL2_KPp) in passi
del 10% circa e lanciare di nuovo una funzione gradino.
170
•
Se la regolazione tende ad oscillare: scegliere un valore più basso
per KPp.
•
Se il valore effettivo segue quello di consegna troppo lentamente:
scegliere un valore più alto per KPp.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Il coefficiente proporzionale CTRL1_KPp (CTRL2_KPp) è impostato sul
valore ottimale quando il valore di consegna viene raggiunto rapidamente e con una sovraelongazione lieve o nulla.
LXM32C
7 Messa in servizio
100%
100%
Regolazione troppo veloce
Ampiezza
Ampiezza
Regolazione troppo lenta
p_ref
p_act
migliorare con:
KPp
p_ref
p_act
migliorare con:
KPp
0%
0%
t
Ottimizzazione di impostazioni insufficienti del regolatore di
posizione
0198441113763, V1.02, 12.2009
Illustrazione 7.17
t
Servoamplificatore AC
171
7 Messa in servizio
7.7
LXM32C
Memory card
Nell'apparecchio è presente uno slot per una memory card. I parametri
memorizzati nella memory card possono essere trasferiti ad altri apparecchi. In caso di sostituzione di un apparecchio è possibile utilizzare un
altro apparecchio dello stesso tipo con gli stessi parametri riscrivendo i
parametri.
NOTA: il contenuto della memory card viene confrontato con i valori presenti sull'apparecchio solo quando l'apparecchio viene inserito.
Memory Card
Se i parametri della memory card sono uguali a quelli dell'apparecchio,
al momento dell'inserimento sul display di 7 segmenti viene visualizzato
brevemente Card.
Illustrazione 7.18
Slot per memory card
Osservare i seguenti punti:
Utilizzare esclusivamente le memory card offerte tra gli accessori.
•
Evitare di toccare i contatti dorati.
•
I cicli di inserimento della memory card sono limitati.
•
La memory card può rimanere nell'apparecchio
0198441113763, V1.02, 12.2009
•
172
Servoamplificatore AC
LXM32C
Inserimento della memory card
7 Messa in servizio
쮿 L'alimentazione di controllo è disinserita
왘 Inserire la memory card con i contatti rivolti verso il basso, conside-
rando che l'angolo smussato deve essere rivolto verso la piastra di
montaggio.
왘 Inserire l'alimentazione di controllo
Osservare il display a 7 segmenti durante l'inizializzazione dell'apparecchio:
Visualizzazione Card
Card viene visualizzato brevemente
Memory card riconosciuta, attività
durante l'inizializzazione dell'apparec- utente non necessaria.
chio.
I valori dei parametri impostati
nell'apparecchio corrispondono a
quelli memorizzati nella memory card.
Card viene visualizzato in modo conti- Memory card riconosciuta, attività
nuo.
utente richiesta.
Vedere il capitolo 7.7.1 "Scambio di
dati con la memory card" a pagina
174. I valori dei parametri memorizzati
nell'apparecchio non corrispondono a
quelli della memory card oppure la
memory card è stata rimossa.
Memory card non rilevata.
Disinserire l'alimentazione di controllo.
Verificare che la memory card sia
stata inserita correttamente (contatti,
angoli smussati).
0198441113763, V1.02, 12.2009
Card non viene visualizzato.
Servoamplificatore AC
173
7 Messa in servizio
7.7.1
LXM32C
Scambio di dati con la memory card
Se vengono rilevate differenze tra i parametri memorizzati nella memory
card e i parametri dell'azionamento o se la memory card è stata rimossa, dopo l'inizializzazione l'apparecchio si blocca e viene visualizzato CARD.
Copiare dati o ignorare memory
card (Cardignr, ctod, dtoc)
쮿 Sul display a 7 segmenti viene visualizzato Card.
왘 Premere il pulsante di navigazione.
컅 Sul display di 7 segmenti viene visualizzata l'ultima impostazione,
ad esempio ignr.
왘 Premere brevemente il pulsante di navigazione per accedere alla
modalità Edit.
컅 Sul display di 7 segmenti viene visualizzata l'ultima impostazione, il
LED Edit si accende.
왘 Selezionare con il pulsante di navigazione1:
•
ignr per ignorare la memory card.
•
ctod per trasferire i dati dalla memory card all'apparecchio.
•
dtoc per trasferire i dati dall'apparecchio alla memory card.
컅 L'apparecchio passa allo stato di funzionamento
4 Ready To Switch On.
1
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
2
Mon
Conf
Mon
ESC
Conf
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Mon
Mon
Conf
Conf
2
3
ESC
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Mon
Mon
Conf
Conf
Fault Edit Value Unit
Op
Mon
Conf
(1)
(2)
(3)
Memory card tramite l'HMI integrato
I dati contenuti nella memory card sono diversi da quelli presenti nell'apparecchio: visualizzazione di card e attesa di intervento da parte dell'utente.
Passaggio allo stato di funzionamento 4 Ready To Switch On
(memory card ignorata).
Trasferimento dei dati (ctod = card to device, dtoc = device
to card) e passaggio allo stato 4 Ready To Switch On.
1. La selezione può essere limitata
174
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Illustrazione 7.19
LXM32C
7 Messa in servizio
La memory card è stata rimossa
(CARDmiss)
Se la memory card è stata rimossa, dopo l'inizializzazione sarà visualizzato CARD. Dopo la conferma sarà visualizzato miss. Dopo aver confermato questa avvertenza il prodotto passa allo stato di funzionamento
4 Ready To Switch On.
Protezione da scrittura per memory
card (CARD, ENPR, dipr, prot)
Per la memory card è possibile attivare una protezione da scrittura per
LXM32 (prot). La protezione da scrittura può essere utilizzata ad esempio per memory card impiegate per la copia periodica di apparecchi.
Per attivare la protezione da scrittura per la memory card selezionare
nell'HMI il menu CONF - ACG-CARD.
Selezione
Spiegazione
ENPR
Protezione da scrittura attivata (prot)
dipr
Protezione da scrittura disattivata
La protezione da scrittura della memory card può essere impostata anche con il software di messa in servizio.
7.8
Esecuzione di una copia delle impostazioni dell'apparecchio
Applicazioni e vantaggi
Condizioni preliminari
•
Le stesse impostazioni possono essere utilizzate per più apparecchi, ad esempio in caso di sostituzione di un apparecchio.
Il tipo di apparecchio, il tipo di motore e il firmware dell'apparecchio devono essere identici.
Strumenti per eseguire una copia:
•
Memory card
•
Software di messa in servizio (per Windows)
L'alimentazione ausiliaria dell'apparecchio deve essere inserita.
Le impostazioni dell'apparecchio possono essere memorizzate su una
memory card disponibile su richiesta. Le impostazioni salvate possono
essere importate in un apparecchio dello stesso tipo. Tenere presente
che con questa operazione viene copiato anche l'indirizzo del bus di
campo. Per maggiori informazioni consultare il capitolo 7.7 "Memory
card" a pagina 172.
Copia con il software di messa in
servizio
Il software di messa in servizio installato su un PC è in grado di salvare
sotto forma di file di configurazione le impostazioni di un apparecchio.
Le impostazioni salvate possono essere importate in un apparecchio
dello stesso tipo. Tenere presente che con questa operazione viene copiato anche l'indirizzo del bus di campo. Per maggiori informazioni consultare il manuale del software di messa in servizio o la guida online.
0198441113763, V1.02, 12.2009
Copia con la memory card
Servoamplificatore AC
175
LXM32C
0198441113763, V1.02, 12.2009
7 Messa in servizio
176
Servoamplificatore AC
LXM32C
8
8 Funzionamento
Funzionamento
8
Il capitolo "Funzionamento" descrive gli stati di funzionamento, i modi
operativi e le funzioni fondamentali dell'apparecchio.
@ AVVERTENZA
COMPORTAMENTO IMPREVISTO
Il comportamento del sistema di azionamento è determinato da un cospicuo numero di dati memorizzati o di impostazioni. Impostazioni o
dati non idonei possono provocare movimenti o segnali inaspettati e
disattivare funzioni di monitoraggio.
•
NON attivare il sistema di azionamento senza conoscerne le
impostazioni o i dati.
•
Verificare i dati memorizzati e le impostazioni.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi di errore.
•
Verificare le funzioni in caso di sostituzione del prodotto e dopo
ogni variazione delle impostazioni o dei dati.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Canali di accesso
Stati di funzionamento
8.1 "Canali di accesso"
8.2 "Stati di funzionamento"
8.2.1 "Diagramma di stato"
8.2.2 "Cambiamenti di stato"
8.2.3 "Segnalazione dello stato di funzionamento"
8.2.4 "Cambio dello stato di funzionamento"
Modi operativi
8.3 "Modi operativi"
8.3.1 "Avvio e cambio di modo operativo"
8.3.2 "Modo operativo Jog"
0198441113763, V1.02, 12.2009
8.3.3 "Modo operativo Electronic Gear"
8.3.4 "Modo operativo Profile Torque"
8.3.5 "Modo operativo Profile Velocity"
Servoamplificatore AC
177
8 Funzionamento
Impostazioni avanzate
LXM32C
8.4 "Impostazioni avanzate"
8.4.1 "Impostazione del senso di movimento"
8.4.2 "Impostazione dell'interfaccia PTO"
8.4.3 "Impostazione della scalatura"
8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali"
8.4.5 "Impostazione dei parametro dell'anello di controllo"
8.5 "Funzioni per il monitoraggio dei segnali interni all'apparecchio"
Funzioni per il monitoraggio dei
segnali interni all'apparecchio
8.5 "Funzioni per il monitoraggio dei segnali interni all'apparecchio"
8.5.1 "Monitoraggio della temperatura"
8.5.2 "Monitoraggio del carico e del sovraccarico (monitoraggio I2T)"
8.5.3 "Monitoraggio dell'errore di posizionamento dovuto al carico (errore
d'inseguimento)"
8.5.4 "Monitoraggio della commutazione"
8.5.5 "Monitoraggio delle fasi della rete"
Funzioni per l'elaborazione del
valore target
8.5.6 "Monitoraggio dei guasti a terra"
8.6.1 "Profilo di movimento per la velocità"
8.6.2 "Arresto del movimento con Halt"
8.6.3 "Arresto del movimento con Quick Stop"
8.6.4 "Inversione degli ingressi segnale analogici"
8.6.5 "Limitazione della corrente tramite ingresso segnale digitale"
8.6.6 "Limitazione della velocità con un ingresso segnale digitale"
8.6.7 "Zero clamp"
Funzioni per il monitoraggio del
movimento
8.7 "Funzioni per il monitoraggio del movimento"
8.7.1 "Interruttori di finecorsa"
8.7.2 "Inattività del motore"
8.7.3 "Finestra errore di posizionamento"
8.7.4 "Finestra errore di velocità"
8.7.5 "Valore soglia di velocità"
0198441113763, V1.02, 12.2009
8.7.6 "Valore soglia di corrente"
178
Servoamplificatore AC
LXM32C
8.1
8 Funzionamento
Canali di accesso
@ AVVERTENZA
REAZIONE IMPREVISTA CAUSATA DA COMANDI DI ACCESSO NON
CORRETTI
Se i canali di accesso non vengono utilizzati correttamente, possono
p.es. causare l'esecuzione o il blocco involontario delle istruzioni.
•
Accertarsi che vengano bloccati tutti gli accessi inammissibili.
•
Accertarsi che siano disponibili tutti gli accessi necessari.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
È possibile accedere al prodotto tramite diversi canali di accesso. I canali di accesso sono:
•
HMI integrata
•
Software di messa in servizio
•
Segnali d'ingresso digitali e analogici
Se sono attivi più canali di accesso contemporaneamente, si possono
verificare reazioni impreviste. Il controllo degli accessi può essere utilizzato per limitare l'accesso a un determinato canale.
Il prodotto offre 2 diverse possibilità di controllare gli accessi.
•
Accesso non esclusivo
•
Accesso esclusivo attraverso un canale di accesso
Quando il prodotto viene inserito, non esiste alcun accesso esclusivo attraverso un canale di accesso.
Solo un canale di accesso può avere un accesso esclusivo al prodotto.
Un accesso esclusivo può avvenire attraverso diversi canali di accesso:
•
Attraverso l'HMI integrata:
Attraverso l'HMI viene eseguito il modo operativo Jog o un autotuning.
•
Attraverso il software di messa in servizio:
Nel software di messa in servizio il commutatore
"Accesso esclusivo" viene impostato su "On".
Quando il prodotto viene inserito, i valori di consegna agiscono sugli ingressi analogici (CN6.1) e sull'interfaccia PTI (Pulse Train In, CN5). Se
un canale di accesso è stato assegnato in modo esclusivo, i segnali agli
ingressi analogici e all'interfaccia PTI vengono ignorati.
0198441113763, V1.02, 12.2009
Le funzioni di ingresso segnale "Halt", "Fault Reset", "Enable", "Positive
Limit Switch (LIMP)", "Negative Limit Switch (LIMN)" e "Reference
Switch (REF)", come pure i segnali della funzione di sicurezza STO
(STO_A e STO_B), agiscono anche in caso di accesso esclusivo.
Attraverso i parametri HMIlocked è possibile revocare l'accesso al prodotto da parte dell'HMI (scrittura dei parametri).
Servoamplificatore AC
179
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
AccessLock
Locking other access channels
0
0
1
UINT16
R/W
-
Modbus 284
0
0
1
UINT16
R/W
per.
-
Modbus 14850
Valore 0: abilitare il controllo attraverso gli
altri canali di accesso
Valore 1: bloccare il controllo attraverso gli
altri canali di accesso
Esempio:
Il canale di accesso viene utilizzato dal bus
di campo.
In questi casi non è possibile un controllo
tramite il software di messa in servizio o
l'HMI.
Il canale di accesso può essere bloccato
solo dopo che è stato terminato il modo operativo in corso.
Le impostazioni modificate vengono acquisite immediatamente.
HMIlocked
Blocco HMI
0 / Not Locked / nLoc: HMI non bloccata
1 / Locked / Loc: HMI bloccata
Quando l'HMI è bloccata non è più possibile
eseguire le seguenti azioni:
- modifica dei parametri
- Jog
- Autotuning
- Fault Reset
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
180
Servoamplificatore AC
LXM32C
8 Funzionamento
8.2
Stati di funzionamento
8.2.1
Diagramma di stato
Dopo l'inserimento l'apparecchio assume una serie di stati operativi finalizzati all'avvio del modo operativo.
Le correlazioni tra gli stati di funzionamento e i cambiamenti di stato
sono illustrate nel diagramma di stato (automa a stati finiti).
Gli stati di funzionamento sono controllati e influenzati a livello interno
dalle funzioni di monitoraggio e di sistema, come ad esempio il monitoraggio della temperatura e della corrente.
Rappresentazione grafica
Il diagramma di stato viene rappresentato graficamente sotto forma di
diagramma di flusso.
Motore senza corrente
Inserimento
1
INIT
Start
nrdy
2
Not Ready
To Switch On
T0
T1
dis
T9
Switch On 3
Disabled
T2
rdy
T15
T7
T12
4
Ready
To Switch On
T10
Son
9
Fault
T3
fLt
5
8888
Switched On
T14
T4
rUn
HALT
fLt
6
Operation
Enabled
T16
Quick Stop Active 7
T13
Stop
HaLt
8
Fault Reaction
Active
T11
8888
Classe di errore 1
Motore riceve corrente
Stato di funzionamento
Cambiamento di stato
0198441113763, V1.02, 12.2009
Illustrazione 8.1
Servoamplificatore AC
Errore
Diagramma di stato
181
8 Funzionamento
Classe di errore
Reazione ad errore
Stato di funzionamento
Descrizione
1 Start
Alimentazione di controllo inserita
Inizializzazione dell'elettronica
2 Not Ready To Switch On
Stadio finale non pronto per l'attivazione
3 Switch On Disabled
Impossibile attivare lo stadio finale
4 Ready To Switch On
Stadio finale pronto per l'attivazione
5 Switched On
Inserimento dello stadio finale
6 Operation Enabled
Stadio finale attivo
Modo operativo impostato attivo
7 Quick Stop Active
Esecuzione della funzione "Quick Stop"
8 Fault Reaction Active
Esecuzione della reazione ad errore
9 Fault
Fine della reazione ad errore
Stadio finale disattivato
Quando si verifica un errore il prodotto attiva una reazione ad errore. La
reazione dell'apparecchio dipende dalla gravità dell'errore secondo la
seguente suddivisione in classi di errore:
Classe
Reazione
di errore
Spiegazione
0
Avvertimento
Una funzione di monitoraggio ha rilevato un problema. Nessuna interruzione del movimento.
1
"Quick Stop"
Il motore si ferma in "Quick-Stop", lo stadio finale
rimane inserito.
2
"Quick Stop" con Il motore si ferma in "Quick-Stop", lo stadio finale
disinserimento si disinserisce quando viene raggiunto lo stato di
inattività.
3
Errore fatale
4
Funzionamento Lo stadio finale si disinserisce senza precedente
incontrollato
arresto del motore. L'errore può essere resettato
esclusivamente disinserendo l'apparecchio.
Lo stadio finale si disinserisce senza precedente
arresto del motore.
Il cambiamento di stato T13 (classe di errore 2, 3 o 4) attiva una reazione ad errore non appena un evento interno segnala un errore che richiede una reazione da parte dell'apparecchio.
Classe di errore
Stato
da -> a
Reazione
2
x -> 8
Arresto del movimento con "Quick Stop"
Chiusura del freno d'arresto
Disattivazione dello stadio finale
3, 4 o funzione di
sicurezza STO
x -> 8 -> 9
Disattivazione immediata dello stadio
finale, anche se la funzione "Quick Stop"
è ancora attiva
Un errore può essere segnalato, ad esempio, da un sensore di temperatura. L'apparecchio interrompe l'istruzione di movimento in corso ed
esegue una reazione all'errore, ad esempio frenata e arresto con "Quick
Stop" o disinserimento dello stadio finale. Successivamente l'apparecchio assume lo stato di funzionamento 9 Fault.
Per uscire dallo stato di funzionamento 9 Fault si deve rimuovere la
causa dell'errore e resettare il messaggio d'errore.
182
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Stati di funzionamento
LXM32C
LXM32C
Reset di un messaggio d'errore
8 Funzionamento
Con un "Fault Reset" viene resettato un messaggio d'errore.
La funzione di ingresso segnale "Fault Reset" è impostata in fabbrica su
DI1.
0198441113763, V1.02, 12.2009
In seguito a un "Quick Stop" attivato da un errore di classe
1 (stato di funzionamento 7 Quick Stop Active),
l'esecuzione di un "Fault Reset" determina direttamente il
ritorno allo stato di funzionamento 6 Operation Enabled.
Servoamplificatore AC
183
8 Funzionamento
8.2.2
LXM32C
Cambiamenti di stato
I cambiamenti di stato vengono attivati da un segnale in ingresso o come
reazione a un segnale di monitoraggio.
Cambiamento di
stato
Stato di
funzionamento
Condizione / Evento 1)
T0
1 -> 2
•
Inizializzazione dell'elettronica apparecchio
eseguita con successo
T1
2 -> 3
•
Inizializzazione dei parametri eseguita con
successo
T2
3 -> 4
•
nessuna sottotensione
Reazione
Verifica dell'encoder eseguita con successo
Velocità effettiva: <1000 min-1
Segnali STO = +24V
T3
4 -> 5
•
Richiesta di attivazione dello stadio finale
T4
5 -> 6
•
Passaggio automatico
Attivazione dello stadio finale
Controllo dei parametri utente
Rilascio del freno d'arresto (se presente)
T7
4 -> 3
•
Sottotensione
-
•
Segnali STO = 0V
•
Velocità effettiva: >1000 min-1
(ad esempio mediante azionamento esterno)
T9
6 -> 3
•
Richiesta di disattivazione dello stadio finale
T10
5 -> 3
•
Richiesta di disattivazione dello stadio finale
T11
6 -> 7
•
Errore con classe di errore 1
Interruzione dell'istruzione di movimento
con "Quick Stop".
T12
7 -> 3
•
Richiesta di disattivazione dello stadio finale
Disattivazione immediata dello stadio
finale, anche se la funzione "Quick Stop"
è ancora attiva.
T13
x -> 8
•
Errore con classe di errore 2, 3 o 4
Esecuzione della risposta errata; vedere
"Reazione ad errore"
T14
8 -> 9
•
Fine della reazione ad errore (classe di errore
2)
•
Errore con classe di errore 3 o 4
T15
9 -> 3
•
Funzione: "Fault reset"
T16
7 -> 6
•
Funzione: "Fault reset"
Disattivazione immediata dello stadio
finale
L'errore viene resettato (la causa
dell'errore deve essere eliminata).
0198441113763, V1.02, 12.2009
1) Per provocare il cambiamento di stato è sufficiente che risulti soddisfatta una delle condizioni indicate
184
Servoamplificatore AC
LXM32C
8.2.3
8 Funzionamento
Segnalazione dello stato di funzionamento
L'HMI e le uscite segnale permettono di ottenere informazioni sullo stato
di funzionamento.
La seguente tabella mostra una panoramica generale.
Stato di funzionamento
HMI
"No fault" 1) "Active" 2)
1 Start
Init
0
0
2 Not Ready To Switch On
nrdy
0
0
3 Switch On Disabled
dis
0
0
4 Ready To Switch On
rdy
1
0
5 Switched On
Son
1
0
6 Operation Enabled
run
1
1
7 Quick Stop Active
Stop
0
0
8 Fault Reaction Active
FLt
0
0
9 Fault
FLt
0
0
0198441113763, V1.02, 12.2009
1) La funzione di uscita segnale corrisponde all'impostazione di fabbrica in DQ0
2) La funzione di uscita segnale corrisponde all'impostazione di fabbrica in DQ1
Servoamplificatore AC
185
8 Funzionamento
LXM32C
8.2.4
Cambio dello stato di funzionamento
8.2.4.1
HMI
Tramite l'HMI è possibile resettare un messaggio d'errore.
1
Fault Edit Value Unit
ESC
Op
Mon
Mon
Conf
Conf
ESC
ESC
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Mon
Mon
Conf
Conf
Illustrazione 8.2
Fault Edit Value Unit
Op
Reset di un messaggio d'errore
In caso di errore della classe di errore 1, il reset del messaggio d'errore
determina un ritorno dallo stato di funzionamento 7 Quick Stop Active
allo stato di funzionamento 6 Operation Enabled.
In caso di errore della classe di errore 2 o 3, il reset del messaggio d'errore determina un ritorno dallo stato di funzionamento 9 Fault allo stato
di funzionamento 3 Switch On Disable.
8.2.4.2
Ingressi segnale
Tramite gli ingressi segnale è possibile passare da uno stato di funzionamento all'altro.
Funzione di ingresso segnale
"Enable"
Attraverso la funzione di ingresso segnale "Enable" viene attivato lo stadio finale.
"Enable"
Cambiamento di stato
fronte di salita
attivazione dello stadio finale
T3
fronte di discesa
disattivazione dello stadio finale
T9 e T12
La funzione di ingresso segnale "Enable" è impostata in fabbrica su
DI0.
Attraverso la funzione di ingresso segnale "Fault Reset" viene resettato
un messaggio d'errore.
"Fault Reset"
Cambiamento di stato
fronte di salita
Reset di un messaggio d'errore
T15 e T16
La funzione di ingresso segnale "Fault Reset" è impostata in fabbrica su
DI1.
186
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Funzione di ingresso segnale
"Fault Reset"
LXM32C
8 Funzionamento
8.3
Modi operativi
8.3.1
Avvio e cambio di modo operativo
Il modo operativo desiderato può essere impostato con il parametro
IOdefaultMode.
Il modo operativo viene avviato tramite l'attivazione dello stadio finale.
왘 Impostare il modo operativo desiderato attraverso il parametro
IOdefaultMode.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOdefaultMode
Modo operativo
0 / None / nonE: Nessuno
1 / Profile Torque / torq: Profile Torque
2 / Profile Velocity / VELP: Profile Velocity
3 / Electronic Gear / GEAr: Electronic Gear
5 / Jog / JoG: Jog
UINT16
R/W
per.
-
Modbus 1286
ConF → ACG-
0
5
5
io-M
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Cambio del modo operativo
mediante ingresso segnale
È disponibile inoltre la funzione di ingresso segnale "Operating Mode
Switch". Essa permette di passare da un modo operativo a un altro mediante un ingresso segnale.
Per poter passare da un modo operativo all'altro, la funzione di ingresso
segnale "Operating Mode Switch" deve essere parametrizzata, vedere
il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IO_ModeSwitch
Modo operativo per la funzione di ingresso
segnale commutazione modo operativo
0
0
3
UINT16
R/W
per.
-
Modbus 1630
ConF → ACG-
0198441113763, V1.02, 12.2009
ioMS
0 / None / nonE: Nessuno
1 / Profile Torque / torq: Profile Torque
2 / Profile Velocity / VELP: Profile Velocity
3 / Electronic Gear / GEAr: Electronic Gear
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
187
8 Funzionamento
8.3.2
LXM32C
Modo operativo Jog
Descrizione
Nel modo operativo Jog (movimento manuale) viene eseguito un movimento dalla posizione motore attuale nella direzione desiderata.
Il movimento può essere eseguito con 2 diversi metodi:
•
Movimento continuo
•
Movimento progressivo
Sono disponibili inoltre 2 velocità parametrizzabili.
Movimento continuo
"Jog positive"
"Jog negative"
"Jog fast/slow"
Sino a quando è presente il segnale per la direzione ( "Jog Positive" o
"Jog Negative"), viene eseguito un movimento continuo nella direzione
desiderata.
1
0
1
0
1
0
v = JOGn_fast
v = JOGn_slow
v=0
v = JOGn_slow
햲
햲
햳
Illustrazione 8.3
(1)
(2)
(3)
햴
햲
Movimento continuo
Movimento lento in direzione positiva
Movimento lento in direzione negativa
Movimento rapido in direzione positiva
Quando è presente il segnale per la direzione ("Jog Positive" o "Jog Negative"), viene eseguito un movimento nella direzione desiderata per un
numero di unità utente parametrizzabile. Terminato questo movimento,
il motore viene arrestato per un intervallo di tempo predefinito. Successivamente viene eseguito il movimento continuo nella direzione desiderata.
0198441113763, V1.02, 12.2009
Movimento progressivo
햲
188
Servoamplificatore AC
LXM32C
8 Funzionamento
"Jog positive"
"Jog fast/slow"
1
0
1
0
v = JOGn_fast
v = JOGn_slow
v=0
v = JOGn_slow
햲
햲
Illustrazione 8.4
(1)
(2)
(3)
(4)
Avvio del modo operativo
햳
햴
햵
햴
Movimento progressivo
Movimento progressivo lento in direzione positivo con numero
parametrizzabile di unità utente JOGstep
Tempo d'attesa JOGtime
Movimento continuo lento in direzione positiva
Movimento continuo rapido in direzione positiva
Il modo operativo deve essere impostato, vedere il capitolo 8.3.1 "Avvio
e cambio di modo operativo". Dopo l'attivazione dello stadio finale il
modo operativo si avvia automaticamente.
Lo stadio finale si attiva mediante gli ingressi segnale, vedere il capitolo
8.2 "Stati di funzionamento". La seguente tabella mostra una panoramica generale delle impostazioni di fabbrica degli ingressi segnale:
Ingresso di segna- Funzione di ingresso segnale
lazione
DI0
"Enable"
Attivazione e disattivazione dello stadio finale
DI1
"Fault Reset"
Reset di un messaggio d'errore
DI2
"Positive Limit Switch (LIMP)"
vedere il capitolo 8.7.1 "Interruttori di finecorsa"
DI3
"Negative Limit Switch (LIMN)"
vedere il capitolo 8.7.1 "Interruttori di finecorsa"
DI4
"Jog Negative"
Modo operativo Jog: movimento in direzione negativa
DI5
"Jog Positive"
Modo operativo Jog: movimento in direzione positiva
0198441113763, V1.02, 12.2009
L'impostazione di fabbrica degli ingressi segnale dipende dal modo operativo impostato e può essere modificata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Servoamplificatore AC
189
8 Funzionamento
HMI interno
LXM32C
In alternativa è possibile avviare il modo operativo anche tramite l'HMI.
Richiamando →OP→jog-→JGST si attiva lo stadio finale e si avvia il
modo operativo.
Ruotando il pulsante di navigazione è possibile scegliere tra 4 diversi tipi
di movimento.
•
JG- : movimento continuo lento in direzione positiva
•
JG= : movimento continuo rapido in direzione positiva
•
-JG : movimento continuo lento in direzione negativa
•
=JG : movimento continuo rapido in direzione negativa
Premendo il pulsante di navigazione, il movimento viene avviato.
Fine del modo operativo
Segnalazione di stato
Con la disattivazione dello stadio finale il modo operativo viene terminato automaticamente.
Le uscite segnale permettono di ottenere informazioni sullo stato di funzionamento e sul movimento corrente.
La seguente tabella mostra una panoramica generale.
Uscita segnale
Funzione di uscita segnale
DQ0
"No Fault"
indica gli stati di funzionamento 4 Ready To Switch On,
5 Switched On e 6 Operation Enabled
DQ1
"Active"
indica lo stato di funzionamento 6 Operation Enabled
DQ2
"In Position Deviation Window"
vedere il capitolo 8.7.3 "Finestra errore di posizionamento"
DQ3
"Motor Standstill"
vedere il capitolo 8.7.2 "Inattività del motore"
DQ4
"Selected Error"
vedere il capitolo 8.2.3 "Segnalazione dello stato di funzionamento"
0198441113763, V1.02, 12.2009
L'impostazione di fabbrica delle uscite segnale può essere modificata,
vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
190
Servoamplificatore AC
LXM32C
8.3.2.1
8 Funzionamento
Parametrizzazione
Panoramica generale
La seguente grafica mostra una panoramica generale dei parametri impostabili.
DI4
DI5
DI0 ... DI5
"Jog negative"
"Jog positive"
"Jog fast/slow"
JOGv_slow, JOGv_fast
IO_JOGmethod
=0
=1
JOGstep
=0
>0
JOGtime
RAMP_v_acc, RAMP_v_dec,
RAMP_v_max, RAMP_v_jerk
Illustrazione 8.5
Velocità
Panoramica generale dei parametri impostabili
Sono disponibili 2 velocità parametrizzabili.
왘 Impostare i valori desiderati mediante i parametri JOGv_slow e
JOGv_fast.
Nome parametro
Menu HMI
Nome HMI
Descrizione
JOGv_slow
Velocità per movimento lento
oP → JoGJGLo
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
usr_v
1
Il valore viene limitato internamente all'impo- 60
stazione corrente del parametro
2147483647
RAMP_v_max.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 10504
UINT32
R/W
per.
-
Modbus 10506
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
JOGv_fast
oP → JoGJGhi
usr_v
1
Il valore viene limitato internamente all'impo- 180
stazione corrente del parametro
2147483647
RAMP_v_max.
Velocità per movimento rapido
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
191
8 Funzionamento
Cambio di velocità
LXM32C
È disponibile inoltre la funzione di ingresso segnale "Jog Fast/Slow".
Essa permette di passare da una velocità all'altra mediante un ingresso
segnale.
Per poter passare da una velocità all'altra, la funzione di ingresso segnale "Jog Fast/Slow" deve essere parametrizzata, vedere il capitolo
8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Selezione del metodo
Con il parametro IO_JOGmethod è possibile impostare il metodo.
왘 Impostare il metodo desiderato con il parametro IO_JOGmethod.
Nome parametro
Menu HMI
Nome HMI
Descrizione
IO_JOGmethod
Selezione del metodo per Jog
ConF → ACGioJG
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0
0 / Continuous Movement / coMo: Jog con 0
movimento continuo
1
1 / Step Movement / StMo: Jog con movimento progressivo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1328
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Impostazione dello movimento
progressivo
Il numero parametrizzabile di unità utente e l'intervallo di tempo per il
quale il motore dovrà arrestarsi possono essere impostati mediante i parametri JOGstep e JOGtime.
왘 Impostare i valori desiderati mediante i parametri JOGstep e
JOGtime.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
JOGstep
Percorso per movimento progressivo
usr_p
1
20
2147483647
INT32
R/W
per.
-
Modbus 10510
ms
1
500
32767
UINT16
R/W
per.
-
Modbus 10512
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
JOGtime
Tempo d'attesa per movimento progressivo
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
La parametrizzazione del profilo di movimento per la velocità può essere modificata, vedere il capitolo 8.6.1 "Profilo di movimento per la velocità".
0198441113763, V1.02, 12.2009
Modifica del profilo di movimento
per la velocità
192
Servoamplificatore AC
LXM32C
8.3.2.2
8 Funzionamento
Ulteriori possibilità di impostazione
Per questo modo operativo possono essere utilizzate le seguenti funzioni:
Parametrizzazione di una finestra errore di posizionamento
Capitolo 8.7.3 "Finestra errore di posizionamento"
•
Parametrizzazione di una finestra errore di velocità
Capitolo 8.7.4 "Finestra errore di velocità"
•
Parametrizzazione di un valore soglia di velocità
Capitolo 8.7.5 "Valore soglia di velocità"
•
Parametrizzazione di un valore soglia di corrente
Capitolo 8.7.6 "Valore soglia di corrente"
•
Commutazione tra 2 record parametri regolatori parametrizzabili
Capitolo 8.4.5.5 "Parametri dell'anello di controllo parametrizzabili"
0198441113763, V1.02, 12.2009
•
Servoamplificatore AC
193
8 Funzionamento
8.3.3
LXM32C
Modo operativo Electronic Gear
Descrizione
Nel modo operativo Electronic Gear (riduttore elettronico) viene eseguito un movimento sulla base di segnali di guida esterni. I segnali di
guida vengono convertiti in un valore di posizione con un rapporto di trasmissione impostabile. I segnali di guida possono essere segnali A/B, P/
D o CW/CCW.
Il movimento può essere eseguito con 3 diversi metodi:
•
Sincronizzazione di posizione senza movimento di compensazione
Con la sincronizzazione di posizione senza movimento di compensazione viene eseguito un movimento in sincronia con la posizione
dei segnali di guida inseriti. I segnali di guida inseriti durante
un'interruzione per arresto o per un errore della classe di errore 1
non sono presi in considerazione.
•
Sincronizzazione di posizione con movimento di compensazione
Con la sincronizzazione di posizione con movimento di compensazione viene eseguito un movimento in sincronia con la posizione dei
segnali di guida inseriti. I segnali di guida inseriti durante un'interruzione per arresto o per un errore della classe di errore 1 sono presi
in considerazione e compensati.
•
Sincronizzazione di velocità
Con la sincronizzazione di velocità viene eseguito un movimento in
sincronia con la velocità dei segnali di guida inseriti.
Unità interne
Il valore di posizione per il movimento dipende dalle unità interne.
Le unità interne ammontano a 131072 incrementi per giro.
Avvio del modo operativo
Il modo operativo deve essere impostato, vedere il capitolo 8.3.1 "Avvio
e cambio di modo operativo". Dopo l'attivazione dello stadio finale il
modo operativo si avvia automaticamente.
Lo stadio finale si attiva mediante gli ingressi segnale, vedere il capitolo
8.2 "Stati di funzionamento". La seguente tabella mostra una panoramica generale delle impostazioni di fabbrica degli ingressi segnale:
DI0
"Enable"
Attivazione e disattivazione dello stadio finale
DI1
"Fault Reset"
Reset di un messaggio d'errore
DI2
"Positive Limit Switch (LIMP)"
vedere il capitolo 8.7.1 "Interruttori di finecorsa"
DI3
"Negative Limit Switch (LIMN)"
vedere il capitolo 8.7.1 "Interruttori di finecorsa"
DI4
"Gear Ratio Switch"
Commutazione tra 2 diversi rapporti di trasmissione
parametrizzabili
DI5
"Halt"
vedere il capitolo 8.6.2 "Arresto del movimento con Halt"
L'impostazione di fabbrica degli ingressi segnale dipende dal modo operativo impostato e può essere modificata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
194
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Ingresso di segna- Funzione di ingresso segnale
lazione
LXM32C
8 Funzionamento
Fine del modo operativo
Segnalazione di stato
Con la disattivazione dello stadio finale il modo operativo viene terminato automaticamente.
Le uscite segnale permettono di ottenere informazioni sullo stato di funzionamento e sul movimento corrente.
La seguente tabella mostra una panoramica generale.
Uscita segnale
Funzione di uscita segnale
DQ0
"No Fault"
indica gli stati di funzionamento 4 Ready To Switch On,
5 Switched On e 6 Operation Enabled
DQ1
"Active"
indica lo stato di funzionamento 6 Operation Enabled
DQ2
"In Position Deviation Window"
vedere il capitolo 8.7.3 "Finestra errore di posizionamento"
DQ3
"Motor Standstill"
vedere il capitolo 8.7.2 "Inattività del motore"
DQ4
"Selected Error"
vedere il capitolo 8.2.3 "Segnalazione dello stato di funzionamento"
0198441113763, V1.02, 12.2009
L'impostazione di fabbrica delle uscite segnale può essere modificata,
vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Servoamplificatore AC
195
8 Funzionamento
8.3.3.1
LXM32C
Parametrizzazione
Panoramica generale
La seguente grafica mostra una panoramica generale dei parametri impostabili.
PTI
A/B
P/D
CW/CCW
=0
=1
=2
PTI_signaltype
InvertDirOfCount
DI4
"Gear Ratio Switch"
(DI0 ... DI5)
GEARratio
=0
GEARnum2
= 1 ... 11
GEARdenom2
GEARnum
GEARdenom
IO_GEARmethod
=1
=3
=2
GEARposChgMode
RAMP_v_enable
=0
DI0 ... DI5
=1
"Gear Offset 1"
RAMP_v_acc
"Gear Offset 2"
RAMP_v_dec
RAMP_v_max
Illustrazione 8.6
196
Panoramica generale dei parametri impostabili
Servoamplificatore AC
0198441113763, V1.02, 12.2009
GEARdir_enabl
LXM32C
8 Funzionamento
Tipo di segnali di guida
In corrispondenza della connessione PTI (Pulse Train In, CN5) è possibile connettere segnali A/B, P/D o CW/CCW.
왘 Impostare il tipo di segnali di guida desiderato mediante il parame-
tro PTI_signaltype.
Nome parametro
Menu HMI
Nome HMI
Descrizione
PTI_signal_type Selezione del tipo di segnale per l'interfaccia
PTI
ConF → i-o0 / A/B Signals / Ab: segnali ENC_A e
ioPi
ENC_B (valutazione quadrupla)
1 / P/D Signals / Pd: segnali PULSE e DIR
2 / CW/CCW Signals / cWcc: segnali CW e
CCW
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
0
2
UINT16
R/W
per.
-
Modbus 1284
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Inversione dei segnali di guida
La direzione di conteggio dei segnali di guida sull'interfaccia PTI può essere invertita mediante il parametro InvertDirOfCount.
왘 Attivare o disattivare l'inversione della direzione di conteggio
mediante il parametro InvertDirOfCount.
Nome parametro
Menu HMI
Nome HMI
Descrizione
InvertDirOfCount
Inversione della direzione di conteggio
sull'interfaccia PTI
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0
0
0 / Inversion Off: inversione della direzione 1
di conteggio disattivata
1 / Inversion On: inversione della direzione
di conteggio attivata
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2062
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
197
8 Funzionamento
Rapporto di trasmissione
LXM32C
Il rapporto di trasmissione è il rapporto tra il numero di incrementi del
motore e il numero di incrementi di guida forniti esternamente.
Incrementi motore
Numeratore del fattore di trasmissione
Fattore di
=
=
trasmissione
Incrementi di riferimento Denominatore del fattore di trasmissione
La funzione di ingresso segnale "Gear Ratio Switch" permette di scegliere tra 2 diversi rapporti di trasmissione nell'ambito del funzionamento in corso.
Con il parametro GEARratio è possibile impostare un rapporto di trasmissione predefinito. In alternativa è possibile selezionare un rapporto
di trasmissione parametrizzabile.
Il rapporto di trasmissione parametrizzabile può essere definito mediante i parametri GEARnum e GEARdenom. Un numeratore negativo inverte la direzione di movimento del motore.
왘 Impostare il rapporto di trasmissione desiderato mediante i parame-
tri GEARratio, GEARnum, GEARdenom, GEARnum2 e
GEARdenom2.
Nome parametro
Menu HMI
Nome HMI
Descrizione
GEARratio
Selezione di rapporti di trasmissione speciali 0
0 / Gear Factor / FAct: uso del rapporto di 0
trasmissione impostato con GEARnum/
11
GEARdenom
1 / 200 / 200: 200
2 / 400 / 400: 400
3 / 500 / 500: 500
4 / 1000 / 1000: 1000
5 / 2000 / 2000: 2000
6 / 4000 / 4000: 4000
7 / 5000 / 5000: 5000
8 / 10000 / 10.00: 10000
9 / 4096 / 4096: 4096
10 / 8192 / 8192: 8192
11 / 16384 / 16.38: 16384
ConF → i-oGFAC
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 9740
INT32
R/W
per.
-
Modbus 9736
Una modifica della grandezza pilota di entità
pari al valore indicato determina una rotazione completa del motore.
GEARnum
Numeratore del rapporto di trasmissione
GEARnum
---------------------- = Gear ratio
GEARdenom
-2147483648
1
2147483647
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Il nuovo rapporto di trasmissione viene
acquisito al caricamento del valore relativo al
numeratore.
Le impostazioni modificate vengono acquisite immediatamente.
198
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
GEARdenom
Denominatore del rapporto di trasmissione
1
1
2147483647
INT32
R/W
per.
-
Modbus 9734
-2147483648
1
2147483647
INT32
R/W
per.
-
Modbus 9754
1
1
2147483647
INT32
R/W
per.
-
Modbus 9752
vedere la descrizione di GEARnum
Numeratore del rapporto di trasmissione
numero 2
GEARnum2
GEARnum2
---------------------- = Gear ratio
GEARdenom2
Il nuovo rapporto di trasmissione viene
acquisito al caricamento del valore relativo al
numeratore.
Le impostazioni modificate vengono acquisite immediatamente.
Denominatore del rapporto di trasmissione
numero 2
GEARdenom2
vedere la descrizione di GEARnum
Selezione del metodo
Il metodo definisce la modalità in cui sarà eseguito il movimento.
왘 Impostare il metodo desiderato con il parametro IO_GEARmethod.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IO_GEARmethod
Tipo di elaborazione per il modo operativo
Electronic Gear
1
1
3
UINT16
R/W
per.
-
Modbus 1326
ConF → ACGioGM
1 / Position Synchronization Immediate /
PoiM: sincronizzazione di posizione senza
movimento di compensazione
2 / Position Synchronization Compensated / Poco: sincronizzazione di posizione con
movimento di compensazione
3 / Velocity Synchronization / VELo: sincronizzazione di velocità
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Servoamplificatore AC
199
8 Funzionamento
Variazione della posizione con
stadio finale non attivo
LXM32C
Se è selezionato "Sincronizzazione posizione con movimento di compensazione", attraverso il parametro GEARposChgMode è possibile definire come valutare le variazioni di posizione del motore e dei segnali di
guida con stadio finale disattivato. Quando si passa allo stato di funzionamento 6 Operation Enabled, queste variazioni di posizione possono
essere considerate o ignorate:
•
Off: le variazioni di posizione vengono ignorate quando lo stadio
finale è disattivato
•
On: le variazioni di posizione vengono considerate quando lo stadio
finale è disattivato.
Le variazioni di posizione che si verificano tra l'avvio del modo operativo e la successiva attivazione dello stadio finale vengono ignorate.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
GEARposChgMode
Considerazione delle modifiche di posizione 0
con stadio finale non attivo
0
0 / Off: negli stati con stadio finale non attivo 1
le modifiche di posizione vengono ignorate
1 / On: negli stati con stadio finale non attivo
le modifiche di posizione vengono considerate
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 9750
L'impostazione ha effetto solo se il riduttore
elettronico viene avviato nel tipo di elaborazione "Sincronizzazione con movimento di
compensazione".
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Movimento di offset
Con il movimento di offset è possibile eseguire un movimento con un numero di incrementi parametrizzabile.
Un movimento di offset è disponibile esclusivamente con i metodi Sincronizzazione posizione senza movimento di compensazione e Sincronizzazione posizione con movimento di compensazione.
Per poter utilizzare il movimento di offset, le funzioni di ingresso segnale
"Gear Offset 1" e "Gear Offset 2" devono essere parametrizzate, vedere
il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Mediante i parametri OFSv_target e OFS_Ramp è possibile impostare
la velocità e l'accelerazione del movimento di offset.
200
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Sono disponibili 2 posizioni di offset parametrizzabili. Mediante i parametri OFSp_RelPos1 e OFSp_RelPos2 è possibile impostare la posizione di offset per le funzioni di ingresso segnale "Gear Offset 1" e "Gear
Offset 2".
LXM32C
8 Funzionamento
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Posizione di offset relativa 1 per la funzione Inc
di ingresso segnale Gear Offset 1
-2147483648
0
Le impostazioni modificate vengono acqui- 2147483647
site immediatamente.
INT32
R/W
per.
-
Modbus 10000
OFSp_RelPos2
Posizione di offset relativa 2 per la funzione Inc
di ingresso segnale Gear Offset 2
-2147483648
0
Le impostazioni modificate vengono acqui- 2147483647
site immediatamente.
INT32
R/W
per.
-
Modbus 10004
OFSv_target
Velocità target per il movimento di offset
usr_v
1
60
2147483647
UINT32
R/W
per.
-
Modbus 9992
usr_a
1
600
2147483647
UINT32
R/W
per.
-
Modbus 9996
Nome parametro
Menu HMI
Nome HMI
Descrizione
OFSp_RelPos1
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Se il fattore della scalatura velocità
ammesso è pari a 1 il valore massimo consentito è pari a 5000.
Ciò vale per tutti i fattori di scalatura definiti
dall'utente. Esempio se il fattore definito
dall'utente per la scalatura velocità è pari a 2
(ScaleVELnum = 2, ScaleVELdenom = 1), il
valore massimo consentito è pari a 2500.
Le impostazioni modificate vengono acquisite immediatamente.
Accelerazione e decelerazione per il movimento di offset
OFS_Ramp
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Modifica del profilo di movimento
per la velocità
La parametrizzazione del profilo di movimento per la velocità può essere modificata, vedere il capitolo 8.6.1 "Profilo di movimento per la velocità".
Abilitazione direzione
Con l'abilitazione direzione è possibile limitare un movimento alla sola
direzione positiva o negativa. L'abilitazione direzione può essere impostata con il parametro GEARdir_enabl.
왘 Impostare la direzione di movimento desiderato mediante il para-
0198441113763, V1.02, 12.2009
metro GEARdir_enabl.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
GEARdir_enabl
Direzione di movimento abilitato per il modo Riduttore
1
3
1 / Positive: senso positivo
3
2 / Negative: senso negativo
3 / Both: entrambi i sensi di rotazione
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 9738
Permette di attivare un'interdizione del movimento di ritorno.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
201
8 Funzionamento
8.3.3.2
LXM32C
Ulteriori possibilità di impostazione
Per questo modo operativo possono essere utilizzate le seguenti funzioni:
•
Parametrizzazione di una finestra errore di posizionamento
Capitolo 8.7.3 "Finestra errore di posizionamento"
Questa funzione è disponibile soltanto nei metodi "sincronizzazione
di posizione senza movimento di compensazione" e "sincronizzazione di posizione con movimento di compensazione".
•
Parametrizzazione di una finestra di velocità
Capitolo
Questa funzione è disponibile soltanto nel metodo "sincronizzazione di velocità".
•
Parametrizzazione di una finestra errore di velocità
Capitolo 8.7.4 "Finestra errore di velocità"
Questa funzione è disponibile soltanto nel metodo "sincronizzazione di velocità".
Parametrizzazione di un valore soglia di velocità
Capitolo 8.7.5 "Valore soglia di velocità"
•
Parametrizzazione di un valore soglia di corrente
Capitolo 8.7.6 "Valore soglia di corrente"
•
Commutazione tra 2 record parametri regolatori parametrizzabili
Capitolo 8.4.5.5 "Parametri dell'anello di controllo parametrizzabili"
0198441113763, V1.02, 12.2009
•
202
Servoamplificatore AC
LXM32C
8.3.4
8 Funzionamento
Modo operativo Profile Torque
Descrizione
Nel modo operativo Profile Torque viene eseguito un movimento con la
coppia target desiderata.
Avvio del modo operativo
Il modo operativo deve essere impostato, vedere il capitolo 8.3.1 "Avvio
e cambio di modo operativo". Dopo l'attivazione dello stadio finale il
modo operativo si avvia automaticamente.
Lo stadio finale si attiva mediante gli ingressi segnale, vedere il capitolo
8.2 "Stati di funzionamento". La seguente tabella mostra una panoramica generale delle impostazioni di fabbrica degli ingressi segnale:
Ingresso di segna- Funzione di ingresso segnale
lazione
DI0
"Enable"
Attivazione e disattivazione dello stadio finale
DI1
"Fault Reset"
Reset di un messaggio d'errore
DI2
"Operating Mode Switch"
vedere il capitolo 8.3.1 "Avvio e cambio di modo operativo"
DI3
"Velocity Limitation"
vedere il capitolo 8.6.6 "Limitazione della velocità con un
ingresso segnale digitale"
DI4
"Current Limitation"
vedere il capitolo 8.6.5 "Limitazione della corrente tramite ingresso segnale digitale"
DI5
"Halt"
vedere il capitolo 8.6.2 "Arresto del movimento con Halt"
L'impostazione di fabbrica degli ingressi segnale dipende dal modo operativo impostato e può essere modificata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Con la disattivazione dello stadio finale il modo operativo viene terminato automaticamente.
0198441113763, V1.02, 12.2009
Fine del modo operativo
Servoamplificatore AC
203
8 Funzionamento
Segnalazione di stato
LXM32C
Le uscite segnale permettono di ottenere informazioni sullo stato di funzionamento e sul movimento corrente.
La seguente tabella mostra una panoramica generale.
Uscita segnale
Funzione di uscita segnale
DQ0
"No Fault"
indica gli stati di funzionamento 4 Ready To Switch On,
5 Switched On e 6 Operation Enabled
DQ1
"Active"
indica lo stato di funzionamento 6 Operation Enabled
DQ2
"Current Threshold Reached"
vedere il capitolo 8.7.6 "Valore soglia di corrente"
DQ3
"Motor Standstill"
vedere il capitolo 8.7.2 "Inattività del motore"
DQ4
"Selected Error"
vedere il capitolo 8.2.3 "Segnalazione dello stato di funzionamento"
0198441113763, V1.02, 12.2009
L'impostazione di fabbrica delle uscite segnale può essere modificata,
vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
204
Servoamplificatore AC
LXM32C
8.3.4.1
8 Funzionamento
Parametrizzazione
Panoramica generale
La seguente grafica mostra una panoramica generale dei parametri impostabili.
DI0 ... DI5
±10V
±10V
AI1
AI2
"Inversion AI1"
"Inversion AI2"
AI1_mode
AI2_mode
=3
=2
AI1_M_scale
DI0 ... DI5
AI2_v_max
=4
AI2_I_max
RAMP_tq_enable
=1
=0
RAMP_tq_slope
Illustrazione 8.7
Impostazione del modo d'uso
Panoramica generale dei parametri impostabili
Mediante i parametri AI1_mode e AI2_mode è possibile impostare il
modo d'uso degli ingressi segnale analogici.
왘 Impostare il modo d'uso desiderato con i parametri AI1_mode e
AI2_mode.
Valore 1: irrilevante in questo modo operativo
•
Valore 2: coppia target per un valore di tensione pari a +10V
•
Valore 3: limitazione della velocità
•
Valore 4: limitazione della coppia
0198441113763, V1.02, 12.2009
•
Servoamplificatore AC
205
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_mode
0
0 / None / nonE: nessuna funzione
1
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
ConF → i-oA1Mo
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Analogico 1: modo d'uso
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2332
UINT16
R/W
per.
-
Modbus 2342
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI2_mode
ConF → i-oA2Mo
0
0 / None / nonE: nessuna funzione
0
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
Analogico 2: modo d'uso
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Impostazione della coppia target
La coppia target per un valore di tensione pari a +10Vdc può essere impostata mediante i parametri AI1_M_scale e AI2_M_scale.
왘 Se si desidera utilizzare l'ingresso segnale analogico AI1, impo-
stare la coppia target desiderata per un valore di tensione pari a
+10Vdc mediante il parametro AI1_M_scale.
0198441113763, V1.02, 12.2009
Se si desidera utilizzare l'ingresso segnale analogico AI2, impostare la coppia target desiderata per un valore di tensione pari a
+10Vdc mediante il parametro AI2_M_scale.
206
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_M_scale
Analogico 1: coppia per 10 V nel modo ope- %
rativo Profile Torque
-3000.0
100.0
100,0% corrisponde alla coppia continuativa 3000.0
di stallo _M_M_0.
ConF → i-oA1iS
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 2340
INT16
R/W
per.
-
Modbus 2350
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
AI2_M_scale
ConF → i-oA2iS
Analogico 2: coppia per 10 V nel modo ope- %
-3000.0
rativo Profile Torque
100.0
100,0% corrisponde alla coppia continuativa 3000.0
di stallo _M_M_0.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
Impostazione della limitazione
La limitazione per un valore di tensione pari a +10Vdc può essere impostata mediante i parametri AI1_I_max, AI2_I_max, AI1_v_max e
AI2_v_max.
왘 Impostare la limitazione desiderata mediante i parametri
0198441113763, V1.02, 12.2009
AI1_I_max, AI2_I_max, AI1_v_max, o AI2_v_max.
Tipo di limitazione
Ingresso di segnalazione Parametro
Corrente max
AI1
AI1_I_max
Corrente max
AI2
AI2_I_max
Velocità
AI1
AI1_v_max
Velocità
AI2
AI2_v_max
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_I_max
Analogico 1: limitazione di corrente con 10 V Arms
0.00
In passi di 0,01 Arms.
3.00
300.00
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ConF → i-oA1iL
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2334
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
207
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI2_I_max
Analogico 2: limitazione di corrente con 10 V Arms
0.00
In passi di 0,01 Arms.
3.00
300.00
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ConF → i-oA2iL
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2344
UINT32
R/W
per.
-
Modbus 2336
UINT32
R/W
per.
-
Modbus 2346
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI1_v_max
Analogico 1: limitazione della velocità con 10 usr_v
1
V
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI2_v_max
Analogico 2: limitazione della velocità con 10 usr_v
1
V
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Offset e finestra di tensione zero
L'andamento del valore target in funzione del valore in ingresso ±10V
può essere modificato:
•
Parametrizzazione di un offset
•
parametrizzazione di una finestra di tensione zero
Le impostazioni effettuabili per gli ingressi analogici sono descritte nel
capitolo 7.5.4 "Ingressi analogici".
La parametrizzazione del profilo di movimento per la coppia può essere
modificata.
0198441113763, V1.02, 12.2009
Modifica del profilo di movimento
per la coppia
208
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
RAMP_tq_enable
Attivazione del profilo di movimento per la
coppia
0
0
1
UINT16
R/W
per.
-
Modbus 1624
UINT32
R/W
per.
-
Modbus 1620
0 / Profile Off: profilo disattivato
1 / Profile On: profilo attivato
Il profilo di movimento può essere attivato o
disattivato nel modo operativo Profile Torque.
In tutti gli altri modi operativi il profilo di movimento per la coppia è disattivato.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
RAMP_tq_slope
Incremento del profilo di movimento per la
coppia
%/s
0.1
10000.0
100,0% corrisponde alla coppia continuativa 3000000.0
di stallo _M_M_0.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
8.3.4.2
Ulteriori possibilità di impostazione
Per questo modo operativo possono essere utilizzate le seguenti funzioni:
Parametrizzazione di un valore soglia di velocità
Capitolo 8.7.5 "Valore soglia di velocità"
•
Parametrizzazione di un valore soglia di corrente
Capitolo 8.7.6 "Valore soglia di corrente"
•
Commutazione tra 2 record parametri regolatori parametrizzabili
Capitolo 8.4.5.5 "Parametri dell'anello di controllo parametrizzabili"
0198441113763, V1.02, 12.2009
•
Servoamplificatore AC
209
8 Funzionamento
8.3.5
LXM32C
Modo operativo Profile Velocity
Descrizione
Nel modo operativo Profile Velocity (profilo di velocità) viene eseguito un
movimento con la velocità target desiderata.
Avvio del modo operativo
Il modo operativo deve essere impostato, vedere il capitolo 8.3.1 "Avvio
e cambio di modo operativo". Dopo l'attivazione dello stadio finale il
modo operativo si avvia automaticamente.
Lo stadio finale si attiva mediante gli ingressi segnale, vedere il capitolo
8.2 "Stati di funzionamento". La seguente tabella mostra una panoramica generale delle impostazioni di fabbrica degli ingressi segnale:
Ingresso di segna- Funzione di ingresso segnale
lazione
DI0
"Enable"
Attivazione e disattivazione dello stadio finale
DI1
"Fault Reset"
Reset di un messaggio d'errore
DI2
"Operating Mode Switch"
vedere il capitolo 8.3.1 "Avvio e cambio di modo operativo"
DI3
"Velocity Limitation"
vedere il capitolo 8.6.6 "Limitazione della velocità con un
ingresso segnale digitale"
DI4
"Zero clamp"
vedere il capitolo 8.6.7 "Zero clamp"
DI5
"Halt"
vedere il capitolo 8.6.2 "Arresto del movimento con Halt"
L'impostazione di fabbrica degli ingressi segnale dipende dal modo operativo impostato e può essere modificata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Con la disattivazione dello stadio finale il modo operativo viene terminato automaticamente.
0198441113763, V1.02, 12.2009
Fine del modo operativo
210
Servoamplificatore AC
LXM32C
8 Funzionamento
Segnalazione di stato
Le uscite segnale permettono di ottenere informazioni sullo stato di funzionamento e sul movimento corrente.
La seguente tabella mostra una panoramica generale.
Uscita segnale
Funzione di uscita segnale
DQ0
"No Fault"
indica gli stati di funzionamento 4 Ready To Switch On,
5 Switched On e 6 Operation Enabled
DQ1
"Active"
indica lo stato di funzionamento 6 Operation Enabled
DQ2
"In Velocity Deviation Window"
vedere il capitolo 8.7.4 "Finestra errore di velocità"
DQ3
"Motor Standstill"
vedere il capitolo 8.7.2 "Inattività del motore"
DQ4
"Selected Error"
vedere il capitolo 8.2.3 "Segnalazione dello stato di funzionamento"
0198441113763, V1.02, 12.2009
L'impostazione di fabbrica delle uscite segnale può essere modificata,
vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Servoamplificatore AC
211
8 Funzionamento
8.3.5.1
LXM32C
Parametrizzazione
Panoramica generale
La seguente grafica mostra una panoramica generale dei parametri impostabili.
DI0 ... DI5
±10V
±10V
AI1
AI2
"Inversion AI1"
"Inversion AI2"
AI1_mode
AI2_mode
=3
=1
AI1_v_scale
DI0 ... DI5
=4
AI2_v_max
AI2_I_max
RAMP_v_enable
=0
=1
RAMP_v_acc
RAMP_v_dec
RAMP_v_max
Illustrazione 8.8
Impostazione del modo d'uso
Panoramica generale dei parametri impostabili
Mediante i parametri AI1_mode e AI2_mode è possibile impostare il
modo d'uso degli ingressi segnale analogici.
왘 Impostare il modo d'uso desiderato con i parametri AI1_mode e
AI2_mode.
Valore 1: velocità target per un valore di tensione pari a +10V
•
Valore 2: irrilevante in questo modo operativo
•
Valore 3: limitazione della velocità
•
Valore 4: limitazione della coppia
0198441113763, V1.02, 12.2009
•
212
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_mode
0
0 / None / nonE: nessuna funzione
1
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
ConF → i-oA1Mo
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Analogico 1: modo d'uso
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2332
UINT16
R/W
per.
-
Modbus 2342
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI2_mode
ConF → i-oA2Mo
0
0 / None / nonE: nessuna funzione
0
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
Analogico 2: modo d'uso
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Impostazione della velocità target
La velocità target per un valore di tensione pari a +10Vdc può essere impostata mediante i parametri AI1_v_scale e AI2_v_scale.
왘 Se si desidera utilizzare l'ingresso segnale analogico AI1, impo-
stare la velocità target desiderata per un valore di tensione pari a
+10Vdc mediante il parametro AI1_v_scale.
0198441113763, V1.02, 12.2009
Se si desidera utilizzare l'ingresso segnale analogico AI2, impostare la velocità target desiderata per un valore di tensione pari a
+10Vdc mediante il parametro AI2_v_scale.
Servoamplificatore AC
213
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
AI1_v_scale
Analogico 1: velocità target con 10 V nel
modo operativo Profile Velocity
usr_v
-2147483648
6000
2147483647
INT32
R/W
per.
-
Modbus 2338
usr_v
-2147483648
6000
2147483647
INT32
R/W
per.
-
Modbus 2348
La velocità massima è limitata all'impostazione di CTRL_v_max.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
Le impostazioni modificate vengono acquisite immediatamente.
AI2_v_scale
Analogico 2: velocità target con 10 V nel
modo operativo Profile Velocity
La velocità massima è limitata all'impostazione di CTRL_v_max.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
Le impostazioni modificate vengono acquisite immediatamente.
Impostazione della limitazione
La limitazione per un valore di tensione pari a +10Vdc può essere impostata mediante i parametri AI1_I_max, AI2_I_max, AI1_v_max e
AI2_v_max.
왘 Impostare la limitazione desiderata mediante i parametri
AI1_I_max, AI2_I_max, AI1_v_max, o AI2_v_max.
Tipo di limitazione
Ingresso di segnalazione Parametro
Corrente max
AI1
AI1_I_max
Corrente max
AI2
AI2_I_max
Velocità
AI1
AI1_v_max
Velocità
AI2
AI2_v_max
Descrizione
AI1_I_max
Analogico 1: limitazione di corrente con 10 V Arms
0.00
In passi di 0,01 Arms.
3.00
300.00
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ConF → i-oA1iL
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2334
0198441113763, V1.02, 12.2009
Nome parametro
Menu HMI
Nome HMI
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
214
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI2_I_max
Analogico 2: limitazione di corrente con 10 V Arms
0.00
In passi di 0,01 Arms.
3.00
300.00
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ConF → i-oA2iL
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 2344
UINT32
R/W
per.
-
Modbus 2336
UINT32
R/W
per.
-
Modbus 2346
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI1_v_max
Analogico 1: limitazione della velocità con 10 usr_v
1
V
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI2_v_max
Analogico 2: limitazione della velocità con 10 usr_v
1
V
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Offset e finestra di tensione zero
L'andamento del valore target in funzione del valore in ingresso ±10V
può essere modificato:
•
Parametrizzazione di un offset
•
parametrizzazione di una finestra di tensione zero
Le impostazioni effettuabili per gli ingressi analogici sono descritte nel
capitolo 7.5.4 "Ingressi analogici".
Modifica del profilo di movimento
per la velocità
8.3.5.2
La parametrizzazione del profilo di movimento per la velocità può essere modificata, vedere il capitolo 8.6.1 "Profilo di movimento per la velocità".
Ulteriori possibilità di impostazione
0198441113763, V1.02, 12.2009
Per questo modo operativo possono essere utilizzate le seguenti funzioni:
Servoamplificatore AC
•
Parametrizzazione di una finestra errore di velocità
Capitolo 8.7.4 "Finestra errore di velocità"
•
Parametrizzazione di un valore soglia di velocità
Capitolo 8.7.5 "Valore soglia di velocità"
•
Parametrizzazione di un valore soglia di corrente
Capitolo 8.7.6 "Valore soglia di corrente"
•
Commutazione tra 2 record parametri regolatori parametrizzabili
Capitolo 8.4.5.5 "Parametri dell'anello di controllo parametrizzabili"
215
8 Funzionamento
LXM32C
8.4
Impostazioni avanzate
8.4.1
Impostazione del senso di movimento
La direzione di movimento del motore può essere invertita.
•
Se l'inversione della direzione di movimento è disattivata:
in caso di valori target positivi il motore si sposta in senso positivo.
•
Se l'inversione della direzione di movimento è attivata:
in caso di valori target positivi il motore si sposta in senso negativo.
La direzione di movimento può essere invertita mediante il parametro
InvertDirOfMove.
Nome parametro
Menu HMI
Nome HMI
Descrizione
InvertDirOfMove Inversione del senso di movimento
ConF → ACGinMo
0 / Inversion Off / oFF: inversione del
senso di movimento disattivata
1 / Inversion On / on: inversione del senso
di movimento attivata
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
0
1
UINT16
R/W
per.
-
Modbus 1560
valore 0:
Motori rotativi: in caso di direzione positiva
l'albero motore ruota in senso orario, guardando la flangia dell'albero motore. In caso
di direzione negativa l'albero motore ruota in
senso antiorario, guardando la flangia
dell'albero motore.
valore 1:
Motori rotativi: in caso di direzione positiva
l'albero motore ruota in senso antiorario,
guardando la flangia dell'albero motore. In
caso di direzione negativa l'albero motore
ruota in senso orario, guardando la flangia
dell'albero motore.
L'interruttore di finecorsa che viene raggiunto con un movimento in direzione positiva deve essere collegato con l'ingresso per
l'interruttore di finecorsa positivo e viceversa.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
216
Servoamplificatore AC
LXM32C
8.4.2
8 Funzionamento
Impostazione dell'interfaccia PTO
L'interfaccia PTO permette di estrarre dall'apparecchio segnali di guida.
Per l'interfaccia PTO sono disponibili 2 diversi modi d'uso.
•
Simulazione encoder
•
Segnale PTI
Il modo d'uso dell'interfaccia PTO può essere impostato mediante il parametro PTO_mode.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
PTO_mode
Modo d'uso dell'interfaccia PTO
0
1
3
UINT16
R/W
per.
-
Modbus 1342
0 / Off: interfaccia PTO disattivata
1 / Esim pAct Enc 1: simulazione encoder
in base alla posizione effettiva dell'encoder 1
2 / Esim pRef: simulazione encoder in base
al valore di consegna di posizione (_p_ref)
3 / PTI Signal: direttamente il segnale
dall'interfaccia PTI
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
217
8 Funzionamento
Simulazione encoder
LXM32C
Se è stata impostata una simulazione encoder mediante il parametro
PTO_mode è possibile impostare la risoluzione della simulazione encoder.
•
: simulazione encoder in base alla posizione effettiva dell'encoder 1
•
Simulazione encoder in base al valore di consegna di posizione
(_p_ref)
La risoluzione della simulazione encoder può essere impostata mediante il parametro ESIM_scale.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ESIM_scale
Risoluzione della simulazione encoder
La risoluzione è il numero di incrementi per
giro (segnale AB con valutazione quadrupla).
UINT16
R/W
per.
-
Modbus 1322
ConF → i-o-
EncInc
8
4096
65535
ESSC
L'impulso di posizione viene prodotto una
volta per giro in un intervallo in cui il segnale
A e il segnale B sono su High.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Se è stato impostato il segnale PTI attraverso il parametro PTO_mode,
il segnale dell'interfaccia PTI viene eseguito direttamente.
0198441113763, V1.02, 12.2009
Segnale PTI
218
Servoamplificatore AC
LXM32C
8.4.3
8 Funzionamento
Impostazione della scalatura
@ AVVERTENZA
MOVIMENTO INASPETTATO IN CASO DI VARIAZIONE DELLA SCALATURA
Variando la scalatura varia anche l'effetto dei dati espressi in unità
utente. Le stesse unità utente dopo la modifica della scalatura producono un movimento diverso.
•
Accertarsi che la scalatura soddisfi tutti i rapporti tra le unità
utente e il movimento.
•
Verificare i parametri con le unità utente.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
La scalatura converte le unità utente in unità interne dell'apparecchio e
viceversa.
Unità utente
Scalatura
Unità interne
Fattore
di scalatura
Calcolo
unità
interne
Posizione
Velocità
Accelerazione
Decelerazione
M
3~
E
Illustrazione 8.9
Unità utente
Fattore di scalatura
Scalatura
Le unità utente sono valori utilizzati per definire posizioni, velocità, accelerazione e decelerazione e si suddividono nelle seguenti unità:
•
usr_p per posizioni
•
usr_v per velocità
•
usr_a per accelerazione e decelerazione
Il fattore di scalatura rappresenta il rapporto tra il movimento del motore
e le unità utente necessarie per tale movimento. Nell'indicare il fattore di
scalatura occorre tenere presente che il numeratore e il denominatore
possono essere esclusivamente numeri interi.
0198441113763, V1.02, 12.2009
NOTA: se viene modificata la scalatura, è necessario controllare e modificare anche le impostazioni del finecorsa software e del registro di posizione.
Servoamplificatore AC
219
8 Funzionamento
8.4.3.1
LXM32C
Configurazione della scalatura posizione
La scalatura posizione rappresenta il rapporto tra il numero di giri del
motore e le unità utente [usr_p] necessarie per ottenere tale regime.
Fattore di scalatura
La scalatura posizione viene indicato come fattore di scalatura.
Nei motori rotativi, il fattore di scalatura si calcola nel seguente modo:
Numbero rivoluzioni del motore
Numbero unità definite dall'utente [usr_p]
Illustrazione 8.10
Fattore di scalatura della scalatura posizione
Il fattore di scalatura può essere impostato mediante i parametri
POSscaleNum e POSscaleDenom. Un fattore di scalatura nuovo si attiva con la trasmissione del valore del numeratore.
Impostazione di fabbrica
L'impostazione di fabbrica è la seguente:
•
1 giro del motore corrisponde a 16384 unità utente
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ScalePOSnum
Numeratore della scalatura posizione
Giro
1
1
2147483647
INT32
R/W
per.
-
Modbus 1552
usr_p
1
Per la descrizione vedere Numeratore (Sca- 16384
lePOSnum)
2147483647
INT32
R/W
per.
-
Modbus 1550
Indicazione del fattore di scalatura:
Giri del motore
------------------------------------------Unità utente [usr_p]
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
ScalePOSdenom
Scalatura posizione: Denominatore
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
220
Servoamplificatore AC
LXM32C
8.4.3.2
8 Funzionamento
Configurazione della scalatura velocità
La scalatura velocità rappresenta il rapporto tra il numero di giri del motore al minuto e le unità utente [usr_v] necessarie per ottenere tale regime.
Fattore di scalatura
La scalatura velocità viene indicata come fattore di scalatura.
Nei motori rotativi, il fattore di scalatura si calcola nel seguente modo:
Numbero rivoluzioni del motore per minuto
Numbero unità definite dall'utente [usr_v]
Illustrazione 8.11
Impostazione di fabbrica
Fattore di scalatura della scalatura velocità
L'impostazione di fabbrica è la seguente:
•
1 giro del motore al minuto corrisponde a 1 unità utente
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ScaleVELnum
Numeratore della scalatura velocità
min-1
1
1
2147483647
INT32
R/W
per.
-
Modbus 1604
usr_v
1
Per la descrizione vedere Numeratore (Sca- 1
leVELnum)
2147483647
INT32
R/W
per.
-
Modbus 1602
Indicazione del fattore di scalatura:
Numero di giri motore [min-1]
-------------------------------------------------Unità utente [usr_v]
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
ScaleVELdenom
Denominatore della scalatura velocità
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Servoamplificatore AC
221
8 Funzionamento
8.4.3.3
LXM32C
Configurazione della scalatura rampa
La scalatura rampa rappresenta il rapporto tra la variazione di velocità e
le unità utente [usr_a] necessarie per tale variazione.
Fattore di scalatura
La scalatura rampa viene indicata come fattore di scalatura:
Variazione velocità per secondo
Numbero unità definite dall'utente [usr_a]
Illustrazione 8.12
Impostazione di fabbrica
Fattore di scalatura della scalatura rampa
L'impostazione di fabbrica è la seguente:
•
La modifica di 1 giro del motore al minuto al secondo corrisponde a
1 unità utente
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ScaleRAMPnum
Numeratore della scalatura rampa
min-1/s
1
1
2147483647
INT32
R/W
per.
-
Modbus 1634
usr_a
1
Per la descrizione vedere Numeratore (Sca- 1
leRAMPnum)
2147483647
INT32
R/W
per.
-
Modbus 1632
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
ScaleRAMPdenom
Denominatore della scalatura rampa
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
222
Servoamplificatore AC
LXM32C
8.4.4
8 Funzionamento
Impostazione delle uscite e degli ingressi segnale digitali
@ AVVERTENZA
COMPORTAMENTO INDESIDERATO DEGLI INGRESSI E DELLE
USCITE
Le funzioni degli ingressi e delle uscite dipendono dal modo operativo
impostato e dalle impostazioni dei corrispondenti parametri.
•
Verificare che il cablaggio sia conforme alle impostazioni.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi d'errore.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Gli ingressi e le uscite segnale digitali possono essere destinati a differenti funzioni.
In base al modo operativo impostato gli ingressi e le uscite segnale digitali possono essere preassegnati a diverse funzioni.
Stato attuale
Mediante i parametri _IO_DI_act e _IO_DQ_act è possibile visualizzare lo stato corrente degli ingressi e delle uscite segnale digitali.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_IO_DI_act
Stato degli ingressi digitali
Destinazione dei bit:
Bit 0: DI0
Bit 1: DI1
Bit 2: DI2
Bit 3: DI3
Bit 4: DI4
Bit 5: DI5
UINT16
R/-
Modbus 2078
Mon
-
-
UINT16
R/-
Modbus 2080
diMo
_IO_DQ_act
Stato delle uscite digitali
Mon
Destinazione dei bit:
Bit 0: DQ0
Bit 1: DQ1
Bit 2: DQ2
Bit 3: DQ3
Bit 4: DQ4
0198441113763, V1.02, 12.2009
doMo
Servoamplificatore AC
223
8 Funzionamento
Impostazioni di fabbrica
LXM32C
Nella seguente tabella sono riportate le impostazioni di fabbrica degli ingressi segnale digitali a seconda del modo operativo impostato:
Segnale
Jog
Electronic Gear
Profile Torque
Profile Velocity
DI0
Enable
Enable
Enable
Enable
DI1
Fault Reset
Fault Reset
Fault Reset
Fault Reset
DI2
Positive Limit Switch
(LIMP)
Positive Limit Switch
(LIMP)
Operating Mode Switch
Operating Mode Switch
DI3
Negative Limit Switch
(LIMN)
Negative Limit Switch
(LIMN)
Velocity Limitation
Velocity Limitation
DI4
Jog negative
Gear Ratio Switch
Current Limitation
Zero Clamp
DI5
Jog positive
Halt
Halt
Halt
Nella seguente tabella sono riportate le impostazioni di fabbrica delle
uscite segnale digitali a seconda del modo operativo impostato:
Segnale
Jog
Electronic Gear
Profile Torque
Profile Velocity
DQ0
No Fault
No Fault
No Fault
No Fault
DQ1
Active
Active
Active
Active
DQ2
In Position Deviation Win- In Position Deviation Win- Current Threshold Readow
dow
ched
In Velocity Deviation Window
DQ3
Motor Standstill
Motor Standstill
Motor Standstill
Motor Standstill
DQ4
Selected Error Output
Selected Error Output
Selected Error Output
Selected Error Output
0198441113763, V1.02, 12.2009
Dopo il cambio del modo operativo impostato e il disinserimento e reinserimento, gli ingressi e le uscite segnale digitali vengono preimpostati
sulle impostazioni di fabbrica.
224
Servoamplificatore AC
LXM32C
8.4.4.1
8 Funzionamento
Configurazione degli ingressi segnale
La seguente tabella presenta una panoramica delle possibili funzioni
degli ingressi segnale a seconda del modo operativo impostato:
Funzione di ingresso segnale
Jog
Electronic Profile
Gear
Torque
Profile
Velocity
Descrizione al capitolo
Freely Available
•
•
•
•
Nessuna funzione
Fault Reset
•
•
•
•
8.2 "Stati di funzionamento"
Enable
•
•
•
•
8.2 "Stati di funzionamento"
Halt
•
•
•
•
8.6.2 "Arresto del movimento con
Halt"
Current Limitation
•
•
•
•
8.6.5 "Limitazione della corrente
tramite ingresso segnale digitale"
Zero Clamp
•
•
•
8.6.7 "Zero clamp"
Velocity Limitation
•
•
•
8.6.6 "Limitazione della velocità
con un ingresso segnale digitale"
Jog Positive
•
8.3.2 "Modo operativo Jog"
Jog Negative
•
8.3.2 "Modo operativo Jog"
Jog Fast/Slow
•
8.3.2 "Modo operativo Jog"
•
Gear Ratio Switch
•
8.3.3 "Modo operativo Electronic
Gear"
Gear Offset 1
•
8.3.3 "Modo operativo Electronic
Gear"
Gear Offset 2
•
8.3.3 "Modo operativo Electronic
Gear"
Positive Limit Switch (LIMP)
•
•
•
•
8.7.1 "Interruttori di finecorsa"
Negative Limit Switch (LIMN)
•
•
•
•
8.7.1 "Interruttori di finecorsa"
Switch Controller Parameter Set
•
•
•
•
8.4.5.5 "Parametri dell'anello di
controllo parametrizzabili"
Inversion AI1
•
•
8.6.4 "Inversione degli ingressi
segnale analogici"
Inversion AI2
•
•
8.6.4 "Inversione degli ingressi
segnale analogici"
•
•
8.3.1 "Avvio e cambio di modo
operativo"
Operating Mode Switch
•
•
0198441113763, V1.02, 12.2009
Mediante i seguenti parametri è possibile parametrizzare gli ingressi segnale digitali:
Servoamplificatore AC
225
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI0
Funzione ingresso DI0
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1794
ConF → i-o-
-
di0
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
226
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI1
Funzione ingresso DI1
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1796
ConF → i-o-
-
di1
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
227
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI2
Funzione ingresso DI2
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1798
ConF → i-o-
-
di2
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
228
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI3
Funzione ingresso DI3
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1800
ConF → i-o-
-
di3
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
229
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI4
Funzione ingresso DI4
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1802
ConF → i-o-
-
di4
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
230
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI5
Funzione ingresso DI5
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1804
ConF → i-o-
-
di5
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
231
8 Funzionamento
8.4.4.2
LXM32C
Configurazione delle uscite segnale
La seguente tabella presenta una panoramica delle possibili funzioni
delle uscite segnale a seconda del modo operativo impostato:
Funzione di uscita segnale
Jog
Electronic Profile
Gear
Torque
Profile
Velocity
Descrizione al capitolo
Freely Available
•
•
•
•
Nessuna funzione
No Fault
•
•
•
•
8.2.3 "Segnalazione dello stato di
funzionamento"
Active
•
•
•
•
8.2.3 "Segnalazione dello stato di
funzionamento"
In Position Deviation Window
•
•
In Velocity Deviation Window
•
•
Velocity Threshold Reached
•
•
Current Threshold Reached
•
Halt Acknowledge
8.7.3 "Finestra errore di posizionamento"
•
8.7.4 "Finestra errore di velocità"
•
•
8.7.5 "Valore soglia di velocità"
•
•
•
8.7.6 "Valore soglia di corrente"
•
•
•
•
8.6.2 "Arresto del movimento con
Halt"
Motor Standstill
•
•
•
•
8.7.2 "Inattività del motore"
Selected Error
•
•
•
•
8.2.3 "Segnalazione dello stato di
funzionamento"
Selected Warning
•
•
•
•
8.2.3 "Segnalazione dello stato di
funzionamento"
0198441113763, V1.02, 12.2009
Mediante i seguenti parametri è possibile parametrizzare le uscite segnale digitali:
232
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ0
Funzione uscita DQ0
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1810
ConF → i-o-
-
-
UINT16
R/W
per.
-
Modbus 1812
do0
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
IOfunct_DQ1
Funzione uscita DQ1
ConF → i-o-
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
0198441113763, V1.02, 12.2009
do1
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
233
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ2
Funzione uscita DQ2
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1814
ConF → i-o-
-
-
UINT16
R/W
per.
-
Modbus 1816
do2
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
IOfunct_DQ3
Funzione uscita DQ3
ConF → i-o-
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
do3
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
234
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ4
Funzione uscita DQ4
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1818
ConF → i-o-
-
do4
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
235
8 Funzionamento
LXM32C
8.4.5
Impostazione dei parametro dell'anello di controllo
8.4.5.1
Panoramica generale della struttura del regolatore
La seguente grafica mostra una panoramica generale della struttura del
regolatore.
1
2
3
P V C
A
B
C
_Iq_act_rms, _Id_act_rms
M
3~
_v_act, _n_act
_p_act, _p_actInt
Illustrazione 8.13
(1)
(2)
(3)
(4)
Regolatore di posizione
4
E
Panoramica generale della struttura del regolatore
Regolatore di posizione
Regolatore di velocità
Regolatore di corrente
Valutazione encoder
Il regolatore di posizione riduce la differenza tra il valore di consegna di
posizione e la posizione effettiva (errore di posizionamento) mantenendola sul valore minimo. Se il regolatore di posizione è stato impostato
correttamente, a motore fermo l'errore di posizionamento è prossimo
allo zero.
La condizione preliminare per una buona amplificazione del regolatore
di posizione è un circuito di regolazione della velocità ottimizzato.
Regolatore di corrente
236
Il regolatore di velocità regola la velocità del motore variando la corrente
del motore in funzione del carico. Esso determina la rapidità di reazione
dell'azionamento. La dinamica del regolatore di velocità dipende da:
•
Momento d'inerzia dell'azionamento e del sistema regolato
•
potenza del motore
•
Rigidità ed elasticità degli elementi nel flusso di forza
•
gioco degli elementi meccanici di azionamento
•
Attrito
Il regolatore di corrente determina la coppia motrice del motore. Con i
dati motore memorizzati il regolatore di corrente viene impostato in
modo ottimale.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Regolatore di velocità
LXM32C
8.4.5.2
8 Funzionamento
Panoramica generale del regolatore di posizione
La seguente grafica mostra una panoramica generale del regolatore di
posizione.
_p_PTI_act
_v_PTI_act
5
2
_v_ref
1
CTRL1_KFPp
_p_dif_comp
4
P
6
A
3
CTRL1_KPp
RAMP_v_max
RAMP_v_acc
RAMP_v_dec
RAMP_v_jerk
_p_act, _p_actInt
Illustrazione 8.14
(1)
(2)
(3)
Segnali di guida per il modo operativo Electronic Gear con i
metodi "sincronizzazione di posizione senza movimento di
compensazione" e "sincronizzazione di posizione con movimento di compensazione".
Interpretazione dei segnali di guida per il modo operativo
Electronic Gear
Valori target per i modi operativi Jog, Profile Position e Homing
Profilo di movimento per la velocità
Comando pilota velocità
Regolatore di posizione
0198441113763, V1.02, 12.2009
(4)
(5)
(6)
Regolatore di posizione
Servoamplificatore AC
237
8 Funzionamento
8.4.5.3
LXM32C
Panoramica generale del regolatore di velocità
La seguente grafica mostra una panoramica generale del regolatore di
velocità.
V
6
_pref_acc
2
CTRL_KFAcc
1
RAMP_v_enable
RAMP_v_max
RAMP_v_acc
RAMP_v_dec
7
CTRL_SpdFric
CTRL1_KFric
3
4
5
8
B
A
CTRL_v_max
CTRL1_OSupDamp CTRL1_TAUnref
CTRL1_OSupDlay
CTRL1_KPn
CTRL1_TNn
_v_act
Illustrazione 8.15
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Segnali di guida per il modo operativo Electronic Gear con il
metodo "sincronizzazione di velocità" e valori target per il
modo operativo Profile Velocity
Profilo di movimento per la velocità
Limitazione di velocità
Overshoot Surppression Filter (parametro accessibile nella
modalità per esperti)
Costante tempo filtrazione per il filtro del valore di consegna
della velocità
Comando pilota accelerazione (parametro accessibile nella
modalità per esperti)
Compensazione attrito (parametro accessibile nella modalità
per esperti)
Regolatore di velocità
0198441113763, V1.02, 12.2009
(8)
Regolatore di velocità
238
Servoamplificatore AC
LXM32C
8.4.5.4
8 Funzionamento
Panoramica generale del regolatore di corrente
La seguente grafica mostra una panoramica generale del regolatore di
corrente.
C
2
1
RAMP_tq_enable
RAMP_tq_slope
3
4
5
B
6
7
CTRL_I_max
C
CTRL1_Nf1damp CTRL1_TAUiref
CTRL1_Nf2damp
CTRL1_Nf1freq
CTRL1_Nf2freq
CTRL1_Nf1bandw
CTRL1_Nf2bandw
_Iq_act_rms, _Id_act_rms
Illustrazione 8.16
(1)
(2)
(3)
(4)
(5)
Valori target per il modo operativo Profile Torque
Profilo di movimento per la coppia
Limitazione di corrente
Notch Filter (parametro accessibile nella modalità per esperti)
Costante tempo filtrazione per il filtro del valore di corrente nominale
Regolatore di corrente
Stadio finale
0198441113763, V1.02, 12.2009
(6)
(7)
Regolatore di corrente
Servoamplificatore AC
239
8 Funzionamento
8.4.5.5
LXM32C
Parametri dell'anello di controllo parametrizzabili
Il prodotto è dotato di 2 record parametri regolatore parametrizzabili separatamente.
Record parametri regolatore
Un record parametri regolatore è costituito da parametri liberamente accessibili e parametri accessibili soltanto nella modalità per esperti.
Record parametri regolatore 1
Record parametri regolatore 2
Parametri liberamente accessibili:
Parametri liberamente accessibili:
CTRL1_KPn
CTRL1_TNn
CTRL1_KPp
CTRL1_TAUiref
CTRL1_TAUnref
CTRL1_KFPp
CTRL2_KPn
CTRL2_TNn
CTRL2_KPp
CTRL2_TAUiref
CTRL2_TAUnref
CTRL2_KFPp
Parametri esperti:
Parametri esperti:
CTRL1_Nf1damp
CTRL1_Nf1freq
CTRL1_Nf1bandw
CTRL1_Nf2damp
CTRL1_Nf2freq
CTRL1_Nf2bandw
CTRL1_Osupdamp
CTRL1_Osupdelay
CTRL1_Kfric
CTRL2_Nf1damp
CTRL2_Nf1freq
CTRL2_Nf1bandw
CTRL2_Nf2damp
CTRL2_Nf2freq
CTRL2_Nf2bandw
CTRL2_Osupdamp
CTRL2_Osupdelay
CTRL2_Kfric
Vedere i capitoli 8.4.5.9 "Record parametri regolatore 1" e 8.4.5.10 "Record parametri regolatore 2".
Parametrizzazione
•
Selezione del record di parametri di regolazione
Selezione del record di parametri di regolazione dopo l'inserimento.
Vedere il capitolo 8.4.5.6 "Selezione del record di parametri di regolazione".
•
Commutazione automatica del record parametri regolatore
È possibile passare da un record parametri regolatore all'altro.
Vedere il capitolo 8.4.5.7 "Commutazione automatica del record
parametri regolatore".
•
Copia di un record parametri regolatore
I valori del record parametri regolatore 1 possono essere copiati nel
record parametri regolatore 2.
0198441113763, V1.02, 12.2009
Vedere il capitolo 8.4.5.8 "Copia di un record parametri regolatore".
240
Servoamplificatore AC
LXM32C
8.4.5.6
8 Funzionamento
Selezione del record di parametri di regolazione
Il parametro _CTRL_ActParSet permette di visualizzare il record parametri regolatore correntemente attivo.
Il parametro CTRL_PwrUpParSet permette di definire il record parametri regolatore da attivare dopo l'inserimento. In alternativa è possibile
stabilire se si debba passare automaticamente da un record parametri
regolatore all'altro.
Il parametro CTRL_SelParSet permette di passare da un record parametri regolatore all'altro nell'ambito del funzionamento in corso.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
-
UINT16
R/-
Modbus 4398
0
1
2
UINT16
R/W
per.
-
Modbus 4400
0
1
Vedere CTRL_PwrUpParSet per la codifica. 2
Le impostazioni modificate vengono acquisite immediatamente.
UINT16
R/W
-
Modbus 4402
_CTRL_ActParSet Record parametri regolatore attivo
Valore 1: è attivo il record parametri regolatore 1
Valore 2: è attivo il record parametri regolatore 2
Un record parametri regolatore diventa attivo
allo scadere del tempo impostato per la
commutazione dei parametri
(CTRL_ParChgTime).
CTRL_PwrUpParSe Selezione del record parametri regolatore
t
durante l'inserimento
0 / Switching Condition: la condizione di
commutazione viene utilizzata per commutare il record parametri regolatore
1 / Parameter Set 1: viene utilizzato il record
parametri regolatore 1
2 / Parameter Set 2: viene utilizzato il record
parametri regolatore 2
Il valore selezionato viene scritto anche in
CTRL_ParSetSel (non persistente).
Le impostazioni modificate vengono acquisite immediatamente.
Selezione del record parametri regolatore
(non persistente)
0198441113763, V1.02, 12.2009
CTRL_SelParSet
Servoamplificatore AC
241
8 Funzionamento
8.4.5.7
LXM32C
Commutazione automatica del record parametri regolatore
È possibile passare automaticamente da un record parametri regolatore
all'altro.
Per il passaggio da un record parametri regolatore all'altro è possibile
impostare le seguenti relazioni:
Impostazioni
•
Ingresso segnale digitale
•
Finestra errore di posizionamento
•
Velocità target indicata dal valore parametrizzabile
•
Velocità effettiva indicata dal valore parametrizzabile
La seguente grafica mostra una panoramica generale del passaggio da
un record di parametri all'altro.
CLSET_ParSwiCond
=1
=2
=3
=4
CLSET_v_Threshol
"Switch
DI0 ... DI5
Controller
Parameter
Set"
Illustrazione 8.17
Diagramma temporale
CLSET_p_DiffWin
CLSET_winTime
Parametri per il cambio del record parametri regolatore
I parametri liberamente accessibili vengono adattati in modo lineare.
L'adattamento lineare dei valori del record parametri regolatore 1 ai valori del record parametri regolatore 2 si effettua nell'intervallo di tempo
parametrizzabile CTRL_ParChgTime.
I parametri accessibili nella modalità per esperti dopo l'intervallo di
tempo parametrizzabile CTRL_ParChgTime assumono direttamente il
valore dell'altro record parametri regolatore.
0198441113763, V1.02, 12.2009
La seguente grafica mostra un diagramma temporale per il cambio dei
parametri di anello di controllo.
242
Servoamplificatore AC
LXM32C
8 Funzionamento
CTRL1_KPn
CTRL1_TNn
CTRL1_KPp
CTRL1_TAUnref
CTRL1_TAUiref
CTRL1_KFPp
1
CTRL2_KPn
CTRL2_TNn
CTRL2_KPp
CTRL2_TAUnref
CTRL2_TAUiref
CTRL2_KFPp
CTRL1_Nf1damp
CTRL1_Nf1freq
CTRL1_Nf1bandw
CTRL1_Nf2damp
CTRL1_Nf2freq
CTRL1_Nf2bandw
CTRL1_Osupdamp
CTRL1_Osupdelay
CTRL1_Kfric
2
CTRL2_Nf1damp
CTRL2_Nf1freq
CTRL2_Nf1bandw
CTRL2_Nf2damp
CTRL2_Nf2freq
CTRL2_Nf2bandw
CTRL2_Osupdamp
CTRL2_Osupdelay
CTRL2_Kfric
CTRL_ParChgTime
Illustrazione 8.18
(1)
I parametri liberamente accessibili vengono adattati in modo
lineare
I parametri accessibili nella modalità per esperti vengono
adattati direttamente
0198441113763, V1.02, 12.2009
(2)
Diagramma temporale per il cambio dei record parametri
regolatore
Servoamplificatore AC
243
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
LXM32C
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0
0
0 / None Or Digital Input: nessuna oppure è 3
stata selezionata la funzione per ingresso
digitale
1 / Inside Position Deviation: all'interno
della distanza d'inseguimento (il valore è
indicato nel parametro CLSET_p_DiffWin)
2 / Below Reference Velocity: al di sotto
della velocià nominale (il valore è indicato
nel parametro CLSET__v_Threshol)
3 / Below Actual Velocity: al di sotto della
velocità effettiva (il valore è indicato nel parametro CLSET_v_Threshol)
CLSET_ParSwiCon Condizioni per la commutazione del record
d
parametri
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4404
UINT16
R/W
per.
-
Modbus 4408
Durante la commutazione dei parametri vengono modificati gradualmente i valori dei
seguenti parametri:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
- CTRL_TAUiref
- CTRL_KFPp
Scaduto il tempo d'attesa per la commutazione dei parametri, vengono modificati i
valori dei seguenti parametri
(CTRL_ParChgTime):
- CTRL_Nf1damp
- CTRL_Nf1freq
- CTRL_Nf1bandw
- CTRL_Nf2damp
- CTRL_Nf2freq
- CTRL_Nf2bandw
- CTRL_Osupdamp
- CTRL_Osupdelay
- CTRL_Kfric
Le impostazioni modificate vengono acquisite immediatamente.
Giro
0.0000
0.0100
Se l'errore di posizionamento del regolatore 2.0000
di posizione è inferiore ai valori di questo
parametro, viene utilizzato il record parametri regolatore 2. Altrimenti viene utilizzato il
record parametri regolatore 1.
CLSET_p_DiffWin Errore di posizionamento per commutazione record parametri
In passi di 0,0001 giri
244
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
LXM32C
8 Funzionamento
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 4410
ms
0
0
1000
UINT16
R/W
per.
-
Modbus 4406
CTRL_ParChgTime Intervallo di tempo per la commutazione del ms
0
record parametri regolatore
0
Durante la commutazione dei parametri ven- 2000
gono modificati gradualmente i valori dei
seguenti parametri:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
- CTRL_TAUiref
- CTRL_KFPp
UINT16
R/W
per.
-
Modbus 4392
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
CLSET_v_Thresho Valore di soglia della velocità per la commu- usr_v
0
l
tazione dei parametri
50
Se la velocià nominale o la velocità effettiva 2147483647
sono inferiori ai valori di questo parametro,
viene utilizzato il record parametri regolatore
2. Altrimenti viene utilizzato il record parametri regolatore 1.
Le impostazioni modificate vengono acquisite immediatamente.
CLSET_winTime
Finestra tempo per la commutazione dei
parametri
Valore 0: monitoraggio finestra disattivato.
Valore >0: tempo finestra per i parametri
CLSET_v_Threshol e CLSET_p_DiffWin.
Le impostazioni modificate vengono acquisite immediatamente.
Una commutazione dei parametri può
essere provocata dai seguenti eventi:
- Modifica del record parametri regolatore
attivo
- Modifica dell'amplificazione globale
- Modifica di uno dei parametri specificati
sopra
- Disattivazione dell'azione integrale del
regolatore di velocità
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
245
8 Funzionamento
8.4.5.8
LXM32C
Copia di un record parametri regolatore
Il parametro CTRL_ParSetCopy permette di copiare i valori del record
parametri regolatore 1 nel record parametri regolatore 2 o i valori del record parametri regolatore 2 nel record parametri regolatore 1.
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL_ParSetCopy Copia del record parametri regolatore
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0.0
Valore 1: copia il record parametri regolatore 1 sul record parametri regolatore 2
0.2
Valore 2: copia il record parametri regolatore
2 sul record parametri regolatore 1
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
-
Modbus 4396
Se il record parametri regolatore 2 viene
copiato sul record parametri regolatore 1, il
parametro CTRL_GlobGain viene impostato
al 100%.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
246
Servoamplificatore AC
LXM32C
8.4.5.9
8 Funzionamento
Record parametri regolatore 1
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_KPn
Coefficiente di proporzionalità (P) del regola- A/min-1
tore di velocità
0.0001
Il valore di default viene ricavato dai parame- 1.2700
tri motore
ConF → drCPn1
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4610
UINT16
R/W
per.
-
Modbus 4612
1/s
2.0
900.0
UINT16
R/W
per.
-
Modbus 4614
ms
0.00
0.50
4.00
UINT16
R/W
per.
-
Modbus 4618
ms
0.00
9.00
327.67
UINT16
R/W
per.
-
Modbus 4616
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_TNn
ConF → drCtin1
Tempo di regolazione del regolatore di velo- ms
cità
0.00
Il valore di default viene calcolato da
327.67
CTRL_TAUiref.
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_KPp
Coefficiente P del regolatore di posizione
ConF → drC-
Il valore di default viene calcolato
PP1
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_TAUiref
Costante tempo filtrazione per il filtro del
valore di corrente nominale
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
CTRL1_TAUnref
ConF → drCtAu1
Costante tempo filtrazione per il filtro del
valore di consegna della velocità
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
247
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL1_KFPp
Velocità comando pilota
ConF → drCFPP1
LXM32C
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4620
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4624
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4626
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4628
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4630
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4632
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4634
%
0.0
0.0
50.0
UINT16
R/W
per.
esperti
Modbus 4636
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
%
0.0
Il valore di questo parametro viene commu- 0.0
tato gradualmente con l'intervallo di tempo 200.0
impostato in CTRL_ParChgTime:
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1damp
Filtro Notch 1: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1freq
Filtro Notch 1: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1bandw
Filtro Notch 1: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf2damp
Filtro Notch 2: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf2freq
Filtro Notch 2: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf2bandw
Filtro Notch 2: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
CTRL1_Osupdamp
Filtro di sovramodulazione: smorzamento
Il valore 0 disinserisce il filtro.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
248
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
LXM32C
Nome parametro
Menu HMI
Nome HMI
8 Funzionamento
Descrizione
CTRL1_Osupdelay Filtro di sovramodulazione: ritardo
Il valore 0 disinserisce il filtro.
In passi di 0,01 ms.
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ms
0.00
0.00
75.00
UINT16
R/W
per.
esperti
Modbus 4638
Arms
0.00
0.00
10.00
UINT16
R/W
per.
esperti
Modbus 4640
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Kfric
Friction compensation: Gain
In passi di 0,01 Arms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
249
8 Funzionamento
LXM32C
8.4.5.10 Record parametri regolatore 2
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL2_KFPp
Velocità comando pilota
ConF → drCFPP2
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4876
UINT16
R/W
per.
esperti
Modbus 4896
UINT16
R/W
per.
-
Modbus 4866
1/s
2.0
900.0
UINT16
R/W
per.
-
Modbus 4870
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4884
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4880
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4882
%
0.0
Il valore di questo parametro viene commu- 0.0
tato gradualmente con l'intervallo di tempo 200.0
impostato in CTRL_ParChgTime:
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Kfric
Friction compensation: Gain
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPn
ConF → drCPn2
Arms
0.00
0.00
10.00
Coefficiente di proporzionalità (P) del regola- A/min-1
tore di velocità
0.0001
Il valore di default viene ricavato dai parame- 1.2700
tri motore
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPp
Coefficiente P del regolatore di posizione
ConF → drC-
Il valore di default viene calcolato
PP2
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf1bandw
Filtro Notch 1: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
CTRL2_Nf1damp
Filtro Notch 1: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf1freq
Filtro Notch 1: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
250
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL2_Nf2bandw
Filtro Notch 2: larghezza di banda
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4890
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4886
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4888
%
0.0
0.0
50.0
UINT16
R/W
per.
esperti
Modbus 4892
ms
0.00
0.00
75.00
UINT16
R/W
per.
esperti
Modbus 4894
ms
0.00
0.50
4.00
UINT16
R/W
per.
-
Modbus 4874
ms
0.00
9.00
327.67
UINT16
R/W
per.
-
Modbus 4872
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf2damp
Filtro Notch 2: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf2freq
Filtro Notch 2: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Osupdamp
Filtro di sovramodulazione: smorzamento
Il valore 0 disinserisce il filtro.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Osupdelay Filtro di sovramodulazione: ritardo
Il valore 0 disinserisce il filtro.
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_TAUiref
Costante tempo filtrazione per il filtro del
valore di corrente nominale
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_TAUnref
ConF → drC-
0198441113763, V1.02, 12.2009
tAu2
Costante tempo filtrazione per il filtro del
valore di consegna della velocità
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
251
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL2_TNn
Tempo di regolazione del regolatore di velo- ms
cità
0.00
Il valore di default viene calcolato da
327.67
CTRL_TAUiref.
ConF → drCtin2
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4868
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
252
Servoamplificatore AC
LXM32C
8 Funzionamento
8.5
Funzioni per il monitoraggio dei segnali interni all'apparecchio
8.5.1
Monitoraggio della temperatura
Le temperature dello stadio finale e del motore sono monitorate internamente.
Temperatura dello stadio finale
Mediante i parametri _PS_T_current e _PS_T_max è possibile visualizzare la temperatura corrente e la temperatura massima dello stadio finale.
Il parametro _PS_T_warn permette di visualizzare il valore soglia per
un'avvertenza.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_PS_T_current
Temperatura corrente dello stadio finale
°C
-
INT16
R/-
Modbus 7200
_PS_T_warn
Soglia di avvertimento temperatura dello sta- °C
dio finale
-
INT16
R/per.
-
Modbus 4108
_PS_T_max
Temperatura massima dello stadio finale
INT16
R/per.
-
Modbus 4110
Mon
tPS
Temperatura del motore
°C
-
Mediante i parametri _M_T_current e _M_T_max è possibile visualizzare la temperatura corrente e la temperatura massima del motore.
Descrizione
_M_T_current
Temperatura corrente del motore
_M_T_max
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
°C
Per i sensori di temperatura che si attivano non è possibile alcuna segnalazione sensata (per il tipo di sensore di temperatura vedere
il parametro M_TempType)
INT16
R/-
Modbus 7202
Temperatura massima del motore
INT16
R/-
Modbus 3360
°C
-
0198441113763, V1.02, 12.2009
Nome parametro
Menu HMI
Nome HMI
Servoamplificatore AC
253
8 Funzionamento
8.5.2
LXM32C
Monitoraggio del carico e del sovraccarico (monitoraggio I2T)
Il carico è il carico termico dello stadio finale, del motore e della resistenza di frenatura.
Il carico e il sovraccarico dei singoli componenti sono monitorati internamente e possono essere visualizzati mediante parametri.
_PA_load
_M_load
_RES_load
0%
100 % 0 %
Illustrazione 8.19
Monitoraggio del carico
100 %
2
1
(1)
(2)
(3)
_PA_overload
_M_overload
_RES_overload
3
Carico e sovraccarico
Nessun carico
Carico massimo, nessun sovraccarico
Sovraccarico massimo
Il carico corrente può essere visualizzato mediante i seguenti parametri:
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_PS_load
Carico attuale dello stadio finale
%
-
INT16
R/-
Modbus 7214
Carico attuale del motore
%
-
INT16
R/-
Modbus 7220
%
Monitoraggio della resistenza di frenatura
interna ed esterna in base alle impostazioni nel parametro RESint_ext.
INT16
R/-
Modbus 7208
Mon
LdFP
_M_load
Mon
LdFM
_RES_load
Mon
0198441113763, V1.02, 12.2009
LdFb
Carico attuale della resistenza di frenatura
254
Servoamplificatore AC
LXM32C
8 Funzionamento
Monitoraggio del sovraccarico
In caso di sovraccarico continuo di durata eccessiva (sovraccarico pari
al 100%) si attiva una limitazione di corrente interna.
Il sovraccarico corrente e il valore di picco possono essere visualizzati
mediante i seguenti parametri:
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
_PS_maxoverload Valore di picco del sovraccarico attuale dello %
stadio finale
Sovraccarico massimo dello stadio finale
verificatosi negli ultimi 10 secondi.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/-
Modbus 7216
_M_overload
Sovraccarico attuale del motore (I2t)
%
-
INT16
R/-
Modbus 7218
_M_maxoverload
Valore di picco del sovraccarico del motore
%
-
INT16
R/-
Modbus 7222
%
-
INT16
R/-
Modbus 7206
%
-
INT16
R/-
Modbus 7210
Sovraccarico massimo del motore verificatosi negli ultimi 10 secondi.
_RES_overload
Sovraccarico attuale della resistenza di frenatura (I2t)
Monitoraggio della resistenza di frenatura
interna ed esterna in base alle impostazioni
nel parametro RESint_ext.
_RES_maxoverloa Valore di picco del sovraccarico della resid
stenza di frenatura
0198441113763, V1.02, 12.2009
Sovraccarico massimo della resistenza di
frenatura verificato negli ultimi 10 secondi.
Servoamplificatore AC
255
8 Funzionamento
8.5.3
LXM32C
Monitoraggio dell'errore di posizionamento dovuto al carico (errore d'inseguimento)
L'errore di posizionamento dovuto al carico è la differenza tra valore di
consegna di posizione e posizione effettiva provocata dal carico.
L'errore di posizionamento massimo dovuto al carico verificatosi durante il funzionamento può essere visualizzato mediante parametri.
L'errore di posizionamento dovuto al carico massimo consentito può essere parametrizzato. Inoltre è possibile parametrizzare la classe di errore di un errore d'inseguimento.
Compensazione dell'errore di
posizionamento dovuto al carico
Visualizzazione dell'errore di
posizionamento
In caso di interruzione del movimento e al raggiungimento di una posizione target l'errore di posizionamento dovuto al carico viene compensato.
L'errore di posizionamento corrente e l'errore di posizionamento massimo riscontrato possono essere visualizzati mediante i parametri
_p_dif_load e _p_dif_load_peak.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_p_dif_load
Attuale errore di posizionamento dovuto al
carico tra valore di consegna di posizione e
posizione effettiva.
Giro
-214748.3648
214748.3647
INT32
R/-
Modbus 7736
Giro
0.0000
429496.7295
UINT32
R/W
-
Modbus 7734
L'errore di posizionamento dovuto al carico è
la differenza tra valore di consegna di posizione e posizione effettiva provocata dal
carico. Questo valore è utilizzato per il monitoraggio degli errori d'inseguimento.
In passi di 0,0001 giri
_p_dif_load_pea Valore massimo dell'errore di posizionak
mento dovuto al carico
Questo parametro contiene l'errore di posizionamento massimo dovuto al carico
riscontrato fino al momento corrente. Con un
accesso in scrittura il valore viene di nuovo
resettato.
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
L'errore di posizionamento massimo può essere impostato mediante i
parametri MON_p_dif_warn e MON_p_dif_load.
Il parametro MON_p_dif_warn definisce il valore limite corrispondente
all'errore di posizionamento massimo, raggiunto il quale viene visualizzata un'avvertenza. Il parametro MON_p_dif_load definisce il valore
limite corrispondente all'errore di posizionamento massimo, raggiunto il
quale viene emesso un errore d'inseguimento.
256
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Impostazione dell'errore di
posizionamento
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
MON_p_dif_warn
Errore di posizionamento massimo dovuto al %
carico (avvertenza)
0
75
100,0% corrisponde all'errore di posiziona- 100
mento massimo (errore d'inseguimento)
impostato nel parametro MON_p_dif_load.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1618
UINT32
R/W
per.
-
Modbus 1606
Le impostazioni modificate vengono acquisite immediatamente.
MON_p_dif_load
Errore di posizionamento massimo dovuto al Giro
0.0001
carico (errore d'inseguimento)
1.0000
L'errore di posizionamento dovuto al carico è 200.0000
la differenza tra valore di consegna di posizione e posizione effettiva provocata dal
carico.
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
Impostazione della classe di errore
Nome parametro
Menu HMI
Nome HMI
Il parametro ErrorResp_p_dif permette di impostare la reazione ad
errore da innescare in caso di errore di posizionamento eccessivo dovuto al carico (errore d'inseguimento).
Descrizione
ErrorResp_p_dif Reazione ad errore d'inseguimento
1 / Error Class 1: classe di errore 1
2 / Error Class 2: classe di errore 2
3 / Error Class 3: classe di errore 3
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
1
3
3
UINT16
R/W
per.
-
Modbus 1302
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
257
8 Funzionamento
8.5.4
LXM32C
Monitoraggio della commutazione
@ AVVERTENZA
MOVIMENTO INASPETTATO
Disattivando le funzioni di monitoraggio aumenta il rischio di un movimento inaspettato.
•
Utilizzare le funzioni di monitoraggio.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
L'apparecchio tiene sotto controllo la plausibilità dell'accelerazione del
motore e della coppia motore utile per individuare e, se necessario, impedire eventuali movimenti incontrollati. Questa funzione di monitoraggio è definita monitoraggio della commutazione.
Se il motore accelera per un arco di tempo superiore a 5-10 ms sebbene
sia in corso una decelerazione del motore alla massima corrente impostata ad opera del regolatore dell'azionamento, il monitoraggio della
commutazione segnala un movimento motore incontrollato.
Il monitoraggio della commutazione può essere disattivato mediante il
parametro MON_commutat.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
MON_commutat
Monitoraggio della commutazione
0
1
1
UINT16
R/W
per.
-
Modbus 1290
0 / Off: monitoraggio della commutazione
disattivato
1 / On: monitoraggio della commutazione
attivato
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
258
Servoamplificatore AC
LXM32C
8.5.5
8 Funzionamento
Monitoraggio delle fasi della rete
ATTENZIONE
DANNO DISTRUTTIVO IN SEGUITO A GUASTO DI UNA FASE DELLA
RETE
Se con un prodotto trifase viene a mancare una fase della rete e la
funzione di monitoraggio è disattivata, il prodotto può sovraccaricarsi
e danneggiarsi irreparabilmente.
•
Utilizzare le funzioni di monitoraggio.
•
Non mettere in funzione il prodotto se una fase della rete è
assente.
L'inosservanza di questa precauzione può avere come conseguenza danni materiali.
Le fasi della rete sono monitorato internamente.
Il parametro ErrorResp_Flt_AC permette di impostare la reazione ad
errore da innescare in caso di assenza di una fase della rete in apparecchi trifase.
Nome parametro
Menu HMI
Nome HMI
Descrizione
ErrorResp_Flt_A Reazione ad errore in caso di assenza di
C
una fase della rete in apparecchi trifase
1 / Error Class 1: classe di errore 1
2 / Error Class 2: classe di errore 2
3 / Error Class 3: classe di errore 3
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
1
2
3
UINT16
R/W
per.
-
Modbus 1300
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Se il prodotto è alimentato tramite bus DC, il monitoraggio delle fasi della
rete deve essere impostato in accordo con la tensione di rete impiegata.
0198441113763, V1.02, 12.2009
Mediante il parametro MON_MainsVolt è possibile impostare il tipo di
monitoraggio delle fasi della rete.
Servoamplificatore AC
259
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
MON_MainsVolt
Identificazione e monitoraggio delle fasi della 0
rete
0
0 / Automatic Mains Detection: identifica- 4
zione automatica e monitoraggio della tensione di rete
1 / DC-Bus Only (Mains 230/480 V): solo
alimentazione tramite bus DC, corrisponde a
una tensione di rete pari a 230 V (monofase)
o 480 V (trifase)
2 / DC-Bus Only (Mains 115 V): solo alimentazione tramite bus DC, corrisponde a
una tensione di rete pari a 115 V (monofase)
3 / Mains 230/480 V: tensione di rete pari a
230 V (monofase) o 480 V (trifase)
4 / Mains 115 V: tensione di rete pari a 115
V (monofase)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
esperti
Modbus 1310
Valore 0: in caso di apparecchi monofase
l'apparecchio, non appena viene rilevata la
tensione di rete, verifica automaticamente se
questa sia pari a 115 V o a 230 V.
Valori 1 ... 2: se l'apparecchio viene alimentato solo dal bus DC, il parametro deve
essere impostato sullo stesso valore di tensione dell'apparecchio alimentato. Un monitoraggio della tensione di rete non viene
effettuato.
Valori 3 ... 4: se in fase di accelerazione la
tensione di rete non viene rilevata correttamente, la tensione da utilizzare può essere
impostata manualmente.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
260
Servoamplificatore AC
LXM32C
8.5.6
8 Funzionamento
Monitoraggio dei guasti a terra
ATTENZIONE
DANNI IRREPARABILI IN SEGUITO A GUASTO A TERRA
Se la funzione di monitoraggio è disattivata il prodotto potrebbe subire
danni irreparabili a causa di un guasto a terra.
•
Utilizzare le funzioni di monitoraggio.
•
Prevenire eventuali guasti a terra con un cablaggio adeguato.
L'inosservanza di questa precauzione può avere come conseguenza danni materiali.
Quando lo stadio finale è attivo, l'apparecchio tiene sotto controllo le fasi
motore per verificare l'assenza di guasti a terra.
La funzione di monitoraggio riconosce un eventuale corto verso terra di
una o più fasi del motore, ma non riconosce un eventuale corto verso
terra del bus DC o della resistenza di frenatura.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0
0 / Off: monitoraggio dei guasti a terra disat- 1
tivato
1
1 / On: monitoraggio dei guasti a terra attivato
MON_GroundFault Monitoraggio dei guasti a terra
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
esperti
Modbus 1312
In casi eccezionali può essere necessario
disattivare questa funzione, ad esempio:
- collegamento in parallelo di più apparecchi
tramite il bus DC
- cavi motore lunghi
Disattivare il monitoraggio dei guasti a terra
se questo reagisce in modo indesiderato.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
261
8 Funzionamento
LXM32C
8.6
Funzioni per l'elaborazione del valore target
8.6.1
Profilo di movimento per la velocità
La posizione target o la velocità target sono grandezze di ingresso che
vengono impostate dall'utente. Tali grandezze di ingresso sono utilizzate per calcolare un profilo di movimento per la velocità.
Il profilo di movimento per la velocità è costituito da un'accelerazione,
una decelerazione, una velocità massima e una limitazione strappi associabile.
La forma di rampa disponibile è una rampa lineare per entrambi i direzioni di movimento.
Disponibilità
A seconda del modo operativo il profilo di movimento per la velocità è
costantemente attivo, attivabile/disattivabile o non disponibile.
•
Nei seguenti modi operativi il profilo di movimento per la velocità è
costantemente attivo:
– Jog
•
Nei seguenti modi operativi il profilo di movimento per la velocità è
attivabile/disattivabile:
– Electronic Gear (sincronizzazione di velocità)
– Profile Velocity
•
Nei seguenti modi operativi il profilo di movimento per la velocità
non è disponibile:
– Electronic Gear (sincronizzazione di posizione)
– Profile Torque
Ripidità di rampa
La ripidità di rampa determina la variazione della velocità nell'unità di
tempo. La ripidità di rampa può essere impostata per l'accelerazione e
per la decelerazione.
v
RAMP_v_max
RAMP_v_acc
RAMP_v_dec
t
Ripidità di rampa
0198441113763, V1.02, 12.2009
Illustrazione 8.20
262
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
RAMP_v_enable
Attivazione del profilo di movimento per la
velocità
0
0
1
UINT16
R/W
per.
-
Modbus 1622
usr_v
1
13200
2147483647
UINT32
R/W
per.
-
Modbus 1554
RAMP_v_acc
Accelerazione del profilo di movimento per la usr_a
velocità
1
600
Le impostazioni modificate vengono acqui- 2147483647
site con lo movimento motore successivo.
UINT32
R/W
per.
-
Modbus 1556
RAMP_v_dec
Decelerazione del profilo di movimento per
la velocità
usr_a
1
600
2147483647
UINT32
R/W
per.
-
Modbus 1558
0 / Profile Off: profilo disattivato
1 / Profile On: profilo attivato
Il profilo di movimento per la velocità può
essere attivato o disattivato nei modi operativi Profile Velocity ed Electronic Gear (sincronizzazione di velocità).
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
RAMP_v_max
ConF → ACGnrMP
Velocità massima del profilo di movimento
per la velocità
Il parametro ha effetto nei seguenti modi
operativi:
- Profile Position
- Profile Velocity (profilo di velocità)
- Homing
- Jog
- Electronic Gear (sincronizzazione di velocità)
Se in uno di questi modi operativi si imposta
una velocità nominale superiore, essa viene
limitato automaticamente al valore di
RAMP_v_max.
Ciò consente di eseguire più facilmente una
messa in servizio a velocità limitata.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
0198441113763, V1.02, 12.2009
Utilizzo nei modi operativi Profile Velocity e
Profile Position.
Nel modo operativo Profile Position il valore
minimo è limitato automaticamente a 120
min-1/s.
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Servoamplificatore AC
263
8 Funzionamento
Limitazione strappi
LXM32C
La limitazione strappi permette di attutire variazioni di accelerazione repentine in modo tale da ottenere un passaggio più morbido e pressoché
esente da strappi.
v
t
Illustrazione 8.21
Limitazione strappi
La limitazione strappi può essere attivata e impostata con il parametro
RAMP_v_jerk.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
RAMP_v_jerk
Limitazione strappi del profilo di movimento
per la velocità
ms
0
0
128
UINT16
R/W
per.
-
Modbus 1562
ConF → drCJEr
0 / Off / oFF: disattivata
1/1/
1: 1 ms
2/2/
2: 2 ms
4/4/
4: 4 ms
8/8/
8: 8 ms
16 / 16 / 16: 16 ms
32 / 32 / 32: 32 ms
64 / 64 / 64: 64 ms
128 / 128 / 128: 128 ms
Limita la variazione (brusca) di velocità della
generazione del riferimento di posizione nei
passaggi:
- inattività - accelerazione
- accelerazione - movimento costante
- movimento costante - decelerazione
- decelerazione - inattività
Elaborazione nei seguenti modi operativi:
- Profile Position
- Jog
- Homing
- Motion Sequence (Profile Position e
Homing)
0198441113763, V1.02, 12.2009
L'impostazione è possibile solo quando il
modo operativo non è attivo (x_end=1).
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
264
Servoamplificatore AC
LXM32C
8.6.2
8 Funzionamento
Arresto del movimento con Halt
Con un arresto, il motore viene arrestato. Il movimento in corso viene interrotto è può nuovamente proseguire.
Un arresto può essere provocato da un ingresso segnale digitale.
Per poter interrompere un movimento con un ingresso segnale, la funzione di ingresso segnale "Halt" deve essere parametrizzata, vedere il
capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
Il movimento può essere interrotto con 2 diversi tipi di decelerazione.
Impostazione del tipo di
decelerazione
Nome parametro
Menu HMI
Nome HMI
•
Decelerazione tramite rampa di decelerazione
•
Decelerazione tramite rampa di coppia
Il tipo di decelerazione viene impostato con il parametro
LIM_HaltReaction.
Descrizione
LIM_HaltReactio Halt option code
n
1 / Deceleration Ramp / dEcE: rampa di
ConF → ACGdecelerazione
3 / Torque Ramp / torq: rampa di coppia
htyP
Tipo di decelerazione all'arresto
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
1
1
3
INT16
R/W
per.
-
Modbus 1582
Impostazione della rampa di decelerazione
con il parametro RAMP_v_dec.
Impostazione della rampa di coppia con il
parametro LIM_I_maxHalt.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
La rampa di decelerazione può essere impostata mediante il profilo di
movimento per la velocità, vedere il capitolo 8.6.1 "Profilo di movimento
per la velocità".
Impostazione della rampa di coppia
La rampa di coppia viene impostata con il parametro LIM_I_maxHalt.
0198441113763, V1.02, 12.2009
Impostazione della rampa di
decelerazione
Servoamplificatore AC
265
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
LIM_I_maxHalt
Limitazione di corrente per Halt
ConF → ACGhcur
LXM32C
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4380
Nell'arresto la limitazione di corrente effettiva
(_Imax_actual) corrisponde al più basso dei
seguenti valori:
- LIM_I_maxHalt
- M_I_max
- PA_I_max
Anche durante un arresto vengono considerate ulteriori riduzioni della corrente risultanti
dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
266
Servoamplificatore AC
LXM32C
8.6.3
8 Funzionamento
Arresto del movimento con Quick Stop
Con un Quick Stop il motore viene arrestato. In movimento in corso
viene interrotto.
Un Quick Stop può essere provocato da un errore di classe 1 o 2.
Il movimento può essere interrotto con 2 diversi tipi di decelerazione.
Impostazione del tipo di
decelerazione
•
Decelerazione tramite rampa di decelerazione
•
Decelerazione tramite rampa di coppia
Il tipo di decelerazione viene impostato con il parametro
LIM_QStopReact.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
LIM_QStopReact
Codice opzione Quick Stop
6 / Deceleration ramp / dEcE: rampa di
decelerazione
7 / Torque ramp / torq: rampa di coppia
INT16
R/W
per.
-
Modbus 1584
ConF → FLt-
6
6
7
qtyP
Tipo di decelerazione per Quick Stop
Impostazione della rampa di decelerazione
con il parametro RAMPquickstop.
Impostazione della rampa di coppia con il
parametro LIM_I_maxQSTP.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
Impostazione della rampa di
decelerazione
La rampa di decelerazione viene impostata con il parametro
RAMPquickstop.
Nome parametro
Menu HMI
Nome HMI
Descrizione
RAMPquickstop
Rampa di decelerazione per QuickStop
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 1572
0198441113763, V1.02, 12.2009
usr_a
200
Rampa di decelerazione per un arresto sof- 6000
tware o un errore della classe di errore 1 o 2. 2147483647
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Tipo dati
R/W
Persistente
Esperti
Servoamplificatore AC
267
8 Funzionamento
Impostazione della rampa di coppia
LXM32C
La rampa di coppia viene impostata con il parametro LIM_I_maxQSTP.
Nome parametro
Menu HMI
Nome HMI
Descrizione
LIM_I_maxQSTP
Limitazione di corrente per Quick Stop
ConF → FLtqcur
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4378
Nel Quick Stop la limitazione di corrente
effettiva (_Imax_actual) corrisponde al più
basso dei seguenti valori:
- LIM_I_maxQSTP
- M_I_max
- PA_I_max
Anche durante un Quick Stop vengono considerate ulteriori riduzioni della corrente
risultanti dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
8.6.4
Inversione degli ingressi segnale analogici
Mediante gli ingressi segnale digitali è possibile invertire la valutazione
dei segnali degli ingressi segnale analogici.
•
La funzione di ingresso segnale "Inversion AI1" permette di invertire
la valutazione dei segnali dell'ingresso segnale analogico AI1.
•
La funzione di ingresso segnale "Inversion AI2" permette di invertire
la valutazione dei segnali dell'ingresso segnale analogico AI2.
0198441113763, V1.02, 12.2009
Per poter invertire la valutazione del segnale degli ingressi segnali analogici, le funzioni di ingresso segnale "Inversion AI1" e "Inversion AI2"
devono essere parametrizzate, vedere il capitolo 8.4.4 "Impostazione
delle uscite e degli ingressi segnale digitali".
268
Servoamplificatore AC
LXM32C
8.6.5
8 Funzionamento
Limitazione della corrente tramite ingresso segnale digitale
La corrente massima può essere limitata con un ingresso segnale digitale.
La limitazione di corrente viene impostata con il parametro
IO_I_limit.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IO_I_limit
Limitazione di corrente tramite ingresso
Una limitazione di corrente può essere attivata con un ingresso digitale.
UINT16
R/W
per.
-
Modbus 1614
ConF → i-o-
Arms
0.00
0.20
300.00
iLiM
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
Per poter limitare la corrente con un ingresso segnale digitale, la funzione di ingresso segnale "Current Limitation" deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi
segnale digitali".
8.6.6
Limitazione della velocità con un ingresso segnale digitale
La velocità massima può essere limitata con un ingresso segnale digitale.
La limitazione di velocità viene impostata con il parametro
IO_v_limit.
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IO_v_limit
Limitazione di velocità tramite ingresso
usr_v
1
10
2147483647
UINT32
R/W
per.
-
Modbus 1596
Una limitazione di velocità può essere attivata con un ingresso digitale.
NOTA: nel modo operativo Profile Torque, la
velocità minima viene limitata internamente
a 100 min-1.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
Per poter limitare la velocità con un ingresso segnale digitale, la funzione di ingresso segnale "Velocity Limitation" deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi
segnale digitali".
Servoamplificatore AC
269
8 Funzionamento
8.6.7
LXM32C
Zero clamp
Il motore può essere arrestato con un ingresso segnale digitale. In questo caso la velocità del motore deve essere inferiore a un valore di velocità parametrizzabile.
La funzione di ingresso segnale "Zero Clamp" è disponibile nei modi
operativi Profile Velocity ed Electronic Gear (sincronizzazione di velocità).
Le velocità target nel modo operativo Profile Velocity e le velocità di consegna nel modo operativo Electronic Gear (sincronizzazione di velocità)
inferiori al valore di velocità parametrizzabile vengono interpretate come
pari a "zero".
La funzione di ingresso segnale "Zero Clamp" ha un'isteresi pari al
20 %.
Con il parametro MON_v_zeroclamp è possibile impostare la velocità.
Nome parametro
Menu HMI
Nome HMI
Descrizione
MON_v_zeroclamp Limitazione di velocità per Zero Clamp
Zero Clamp è solo possibile se la velocità
nominale è inferiore al valore limite per la
velocità di Zero Clamp.
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
usr_v
0
10
2147483647
UINT32
R/W
per.
-
Modbus 1616
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
Per poter arrestare il motore con un ingresso segnale digitale, la funzione di ingresso segnale "Zero Clamp" deve essere parametrizzata,
vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
270
Servoamplificatore AC
LXM32C
8 Funzionamento
8.7
Funzioni per il monitoraggio del movimento
8.7.1
Interruttori di finecorsa
@ AVVERTENZA
PERDITA DI CONTROLLO
L'uso degli interruttori di finecorsa può offrire un certo grado di protezione contro i pericoli (p.es. urto contro l'arresto meccanico dovuto a
valori di consegna non corretti).
•
Se possibile, utilizzare gli interruttori di finecorsa.
•
Controllare la corretta connessione degli interruttori di finecorsa.
•
Verificare la correttezza del montaggio degli interruttori di finecorsa. Gli interruttori di finecorsa devono essere montati ad una
distanza dall'arresto meccanico tale da garantire una sufficiente
corsa di decelerazione.
•
Per poter essere utilizzati, gli interruttori di finecorsa devono
essere omologati.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Interruttori di finecorsa
Un movimento può essere monitorato mediante interruttori di finecorsa.
Per il monitoraggio si possono utilizzare un interruttore di finecorsa positivo e un interruttore di finecorsa negativo.
Quando l'interruttore di finecorsa positivo o quello negativo intervengono il movimento si arresta. Viene visualizzata un messaggio d'errore
e lo stato di funzionamento cambia in 7 Quick Stop Active.
Il messaggio d'errore può essere resettato con un "Fault Reset". Lo
stato di funzionamento torna ad essere 6 Operation Enabled.
Il movimento può essere ripristinato, ma soltanto nella direzione opposta a quella in cui è intervenuto l'interruttore di finecorsa. Ad esempio se
è intervenuto l'interruttore di finecorsa positivo, il movimento può continuare soltanto in direzione negativa. Se il movimento continua in direzione positiva viene emessa nuovamente un messaggio d'errore e lo
stato di funzionamento cambia nuovamente in 7 Quick Stop Active.
0198441113763, V1.02, 12.2009
I parametri IOsigLIMP e IOsigLIMN permettono di attivare i finecorsa
e impostare la valutazione su attivo 0 o attivo 1.
Servoamplificatore AC
271
8 Funzionamento
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOsigLIMP
Valutazione segnali per interruttore di finecorsa positivo
0
1
2
UINT16
R/W
per.
-
Modbus 1568
0
1
2
UINT16
R/W
per.
-
Modbus 1566
0 / Inactive: inattivo
1 / Normally closed: contatto normalmente
chiuso
2 / Normally open: contatto normalmente
aperto
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
IOsigLIMN
Valutazione segnali per interruttore di finecorsa negativo
0 / Inactive: inattivo
1 / Normally closed: contatto normalmente
chiuso
2 / Normally open: contatto normalmente
aperto
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Le funzioni di ingresso segnale "Positive Limit Switch" e "Negative Limit
Switch" devono essere parametrizzate, vedere il capitolo 8.4.4 "Impostazione delle uscite e degli ingressi segnale digitali".
0198441113763, V1.02, 12.2009
Utilizzare, ove possibile, contatti normalmente chiusi, in
modo tale da poter segnalare come errore la rottura di un
filo.
272
Servoamplificatore AC
LXM32C
8.7.2
8 Funzionamento
Inattività del motore
Con l'inattività del motore è possibile verificare se il motore si trovi in
stato di inattività.
A una velocità di <10 min-1 il motore si trova in stato di inattività.
v
v < 10
0
t
1
0
Illustrazione 8.22
Inattività del motore
0198441113763, V1.02, 12.2009
Lo stato può essere visualizzato con un'uscita segnale. Per poter visualizzare lo stato, la funzione di uscita segnale "Motor Standstill" deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione delle uscite
e degli ingressi segnale digitali".
Servoamplificatore AC
273
8 Funzionamento
8.7.3
LXM32C
Finestra errore di posizionamento
Con la finestra errore di posizionamento di posizione è possibile verificare se il motore si trovi all'interno di un errore posizionamento parametrizzabile.
L'errore di posizionamento è la differenza tra valore di consegna di posizione e posizione effettiva.
Un movimento può essere monitorato con 2 diversi metodi:
•
Se l'errore di posizionamento rientra nella finestra errore di posizionamento, l'uscita segnale viene impostata.
•
Se l'errore di posizionamento per il tempo MON_ChkTime rientra
nella finestra errore di posizionamento, l'uscita segnale viene impostata dopo tale intervallo di tempo.
_p_dif
MON_ChkTime
MON_ChkTime
0
t
MON_ChkTime
2 * MON_p_DiffWin
1
=0
0
1
>0
0
Illustrazione 8.23
Finestra errore di posizionamento
I parametri MON_p_DiffWin e MON_ChkTime definiscono le dimensioni della finestra.
Lo stato può essere visualizzato con un'uscita segnale. Per poter visualizzare lo stato, la funzione di uscita segnale "In Position Deviation Window" deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione
delle uscite e degli ingressi segnale digitali".
0198441113763, V1.02, 12.2009
Il parametro MON_ChkTime agisce contemporaneamente
sui parametri MON_p_DiffWin, MON_v_DiffWin,
MON_v_Threshold e MON_I_Threshold.
274
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
MON_p_DiffWin
Monitoraggio dell'errore di posizionamento
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Giro
0.0000
Viene effettuato un controllo per verificare se 0.0010
l'azionamento durante l'intervallo di tempo
0.9999
parametrizzato mediante MON_ChkTime si
trovi all'interno dello scostamento ammesso.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1586
UINT16
R/W
per.
-
Modbus 1594
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
MON_ChkTime
ConF → i-otthr
Finestra tempo di monitoraggio
ms
0
Impostazione di un intervallo di tempo per il 0
monitoraggio di errore di posizionamento,
9999
errore di velocità, valore di velocità e valore
di corrente. Se il valore monitorato per l'intervallo di tempo impostato rientra nell'intervallo ammesso, la funzione di monitoraggio
emette un risultato positivo.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
275
8 Funzionamento
8.7.4
LXM32C
Finestra errore di velocità
Con la finestra errore di velocità di posizione è possibile verificare se il
motore si trovi all'interno di un errore di velocità parametrizzabile.
L'errore di velocità è la differenza tra la velocità di consegna e la velocità
effettiva.
Un movimento può essere monitorato con 2 diversi metodi:
•
Se l'errore di velocità rientra nella finestra errore di velocità, l'uscita
segnale viene impostata.
•
Se l'errore di velocità per l'intervallo di tempo MON_ChkTime rientra
nella finestra errore di velocità, l'uscita segnale viene impostata
dopo tale intervallo di tempo.
MON_ChkTime
2 * MON_v_DiffWin
v
t
MON_ChkTime
0
1
=0
0
1
>0
0
Illustrazione 8.24
Finestra errore di velocità
I parametri MON_v_DiffWin e MON_ChkTime definiscono le dimensioni della finestra.
Lo stato può essere visualizzato con un'uscita segnale. Per poter visualizzare lo stato, la funzione di uscita segnale "In Velocity Deviation Window" deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione
delle uscite e degli ingressi segnale digitali".
0198441113763, V1.02, 12.2009
Il parametro MON_ChkTime agisce contemporaneamente
sui parametri MON_p_DiffWin, MON_v_DiffWin,
MON_v_Threshold e MON_I_Threshold.
276
Servoamplificatore AC
LXM32C
8 Funzionamento
Nome parametro
Menu HMI
Nome HMI
Descrizione
MON_v_DiffWin
Monitoraggio dell'errore di velocità
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
usr_v
1
Viene effettuato un controllo per verificare se 10
l'azionamento durante l'intervallo di tempo
2147483647
parametrizzato mediante MON_ChkTime si
trovi all'interno dello scostamento ammesso.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 1588
UINT16
R/W
per.
-
Modbus 1594
Le impostazioni modificate vengono acquisite immediatamente.
MON_ChkTime
ConF → i-otthr
ms
0
Impostazione di un intervallo di tempo per il 0
monitoraggio di errore di posizionamento,
9999
errore di velocità, valore di velocità e valore
di corrente. Se il valore monitorato per l'intervallo di tempo impostato rientra nell'intervallo ammesso, la funzione di monitoraggio
emette un risultato positivo.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Finestra tempo di monitoraggio
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
277
8 Funzionamento
8.7.5
LXM32C
Valore soglia di velocità
Con il valore soglia di velocità è possibile verificare se la velocità corrente sia inferiore a un valore di velocità parametrizzabile.
Un movimento può essere monitorato con 2 diversi metodi:
•
Se la velocità corrente è inferiore al valore soglia di velocità, l'uscita
segnale viene impostata.
•
Se la velocità corrente per l'intervallo tempo MON_ChkTime è inferiore al valore soglia di velocità, l'uscita segnale viene impostata
dopo tale intervallo di tempo.
v
MON_ChkTime
MON_v_Threshold
t
MON_ChkTime
0
1
=0
0
1
>0
0
Illustrazione 8.25
Valore soglia di velocità
I parametri MON_v_Threshold e MON_ChkTime definiscono le dimensioni della finestra.
Lo stato può essere visualizzato con un'uscita segnale. Per poter visualizzare lo stato, la funzione di uscita segnale "Velocity Below Threshold"
deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione delle
uscite e degli ingressi segnale digitali".
0198441113763, V1.02, 12.2009
Il parametro MON_ChkTime agisce contemporaneamente
sui parametri MON_p_DiffWin, MON_v_DiffWin,
MON_v_Threshold e MON_I_Threshold.
278
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
8 Funzionamento
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
usr_v
1
Viene effettuato un controllo per verificare se 10
l'azionamento durante l'intervallo di tempo
2147483647
parametrizzato mediante MON_ChkTime si
trovi al di sotto del valore definito.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
MON_v_Threshold Monitoraggio del valore soglia di velocità
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 1590
UINT16
R/W
per.
-
Modbus 1594
Le impostazioni modificate vengono acquisite immediatamente.
MON_ChkTime
ConF → i-otthr
ms
0
Impostazione di un intervallo di tempo per il 0
monitoraggio di errore di posizionamento,
9999
errore di velocità, valore di velocità e valore
di corrente. Se il valore monitorato per l'intervallo di tempo impostato rientra nell'intervallo ammesso, la funzione di monitoraggio
emette un risultato positivo.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Finestra tempo di monitoraggio
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
279
8 Funzionamento
8.7.6
LXM32C
Valore soglia di corrente
Con il valore soglia di corrente è possibile verificare se la corrente attuale del motore sia inferiore a un valore di corrente parametrizzabile.
Un movimento può essere monitorato con 2 diversi metodi:
•
Se la corrente attuale del motore è inferiore al valore soglia di corrente, l'uscita segnale viene impostata.
•
Se la corrente attuale del motore per l'intervallo di tempo
MON_ChkTime è inferiore al valore soglia di corrente, l'uscita
segnale viene impostata dopo tale intervallo di tempo.
I
MON_ChkTime
MON_I_Threshold
t
MON_ChkTime
0
1
=0
0
1
>0
0
Illustrazione 8.26
Valore soglia di corrente
I parametri MON_I_Threshold e MON_ChkTime definiscono le dimensioni della finestra.
Lo stato può essere visualizzato con un'uscita segnale. Per poter visualizzare lo stato, la funzione di uscita segnale "Current Below Threshold"
deve essere parametrizzata, vedere il capitolo 8.4.4 "Impostazione delle
uscite e degli ingressi segnale digitali".
0198441113763, V1.02, 12.2009
Il parametro MON_ChkTime agisce contemporaneamente
sui parametri MON_p_DiffWin, MON_v_DiffWin,
MON_v_Threshold e MON_I_Threshold.
280
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
8 Funzionamento
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
MON_I_Threshold Monitoraggio del valore soglia di corrente
ConF → i-oithr
Arms
0.00
Viene effettuato un controllo per verificare se 0.20
l'azionamento durante l'intervallo di tempo
300.00
parametrizzato mediante MON_ChkTime si
trovi al di sotto del valore definito.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Come valore comparativo viene utilizzato il
valore del parametro _Iq_act_rms.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1592
UINT16
R/W
per.
-
Modbus 1594
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
MON_ChkTime
ConF → i-otthr
ms
0
Impostazione di un intervallo di tempo per il 0
monitoraggio di errore di posizionamento,
9999
errore di velocità, valore di velocità e valore
di corrente. Se il valore monitorato per l'intervallo di tempo impostato rientra nell'intervallo ammesso, la funzione di monitoraggio
emette un risultato positivo.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Finestra tempo di monitoraggio
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
281
LXM32C
0198441113763, V1.02, 12.2009
8 Funzionamento
282
Servoamplificatore AC
LXM32C
9 Esempi
9
Esempi
9.1
Indicazioni generali
9
Gli esempi illustrano alcune possibilità di impiego tipiche del prodotto.
Essi sono finalizzati a offrire una panoramica generale, ma non rappresentano schemi di cablaggio completi.
0198441113763, V1.02, 12.2009
L'uso delle funzioni di sicurezza contenute in questo prodotto presuppone un'accurata pianificazione. Per maggiori informazioni consultare il
capitolo 5.9 "Funzione di sicurezza STO ("Safe Torque Off")" a pagina
73
Servoamplificatore AC
283
9 Esempi
9.2
LXM32C
Esempi per il modo operativo Electronic Gear
I valori di consegna vengono predefiniti mediante segnali A/B:
~
+
24VDC -
LXM32C
1
CN2
STO_A
STO_B
24V
0V
2
CN6
AI1+
+
AI1-
- LIMN
AI2+
+
AI2-
- LIMP
SHLD
DICOM
3
CN5 PTI CN4 PTO
CN4
8
8
1
DQCOM
DQ0
DQ1
DQ2
"Active"
"In Position deviation window"
DQ3
"Motor standstill"
"Selective error output"
DQ4
USB
RS485
CN7
4
8
1
CN1
L1
N
L1
N/L2
"No fault"
"Enable"
"Fault_Reset"
"Positive limit switch (LIMP)"
"Negative limit switch (LIMN)"
"Gear ratio switch"
"Halt"
DI0
DI1
DI2
DI3
DI4
DI5
CN5
CN10
6
8
1
5
U
V
W
CN11
BR+
BR-
Pin 4
Pin 5
A
A
Pin 7
Pin 8
B
B
5V
CN3
A
B
8
1
Illustrazione 9.1
(1)
(2)
(3)
(4)
(5)
284
Esempio di cablaggio controllore con segnali A/B
ARRESTO DI EMERGENZA
PLC
Vedere il capitolo 8.4.2 "Impostazione dell'interfaccia PTO"
Per informazioni sugli accessori per la messa in servizio vedere il capitolo 9 "Esempi"
Sorgenti di segnale per segnali A/B
Servoamplificatore AC
0198441113763, V1.02, 12.2009
8
LXM32C
9.3
9 Esempi
Esempi per il modo operativo Profile Velocity
I valori di consegna vengono predefiniti mediante un segnale analogico
±10V.
~
+
24VDC -
LXM32C
1
CN2
STO_A
STO_B
24V
0V
CN4
CN5 PTI CN4 PTO
3
8
L1
L2
L3
L1
L2
L3
2
CN6
AI1+
AI1AI2+
AI2SHLD
DICOM
1
CN1
DQCOM
DQ0
DQ1
DQ2
DQ3
DQ4
DI1
CN8
PB
PC/-
DI2
DI3
DI4
DI5
CN10
6
U
V
W
"No fault"
"Active"
"In velocity deviation window"
"Motor standstill"
"Selective error output"
"Enable"
"Fault reset"
"Operating mode switch"
"Velocity limitation"
"Zero Clamp"
"Halt"
DI0
4
+/-10V
CN7
8
5
1
RS485
CN11
BR+
BR-
USB
CN3
A
B
8
1
8
Illustrazione 9.2
0198441113763, V1.02, 12.2009
(1)
(2)
(3)
(4)
(5)
Servoamplificatore AC
Esempio di cablaggio controllore con segnali A/B
ARRESTO DI EMERGENZA
PLC
Per il funzionamento di ESIM vedere le indicazioni al capitolo
ESIM
Per la resistenza di frenatura esterna vedere il capitolo 9
"Esempi"
Per informazioni sugli accessori per la messa in servizio vedere il capitolo 9 "Esempi"
285
LXM32C
0198441113763, V1.02, 12.2009
9 Esempi
286
Servoamplificatore AC
LXM32C
10
10 Diagnosi e rimozione delle anomalie
Diagnosi e rimozione delle anomalie
10
Questo capitolo descrive possibilità di diagnosi ed è di supporto per la
risoluzione dei problemi.
10.1
Richiesta di stato/indicazione di stato
Le informazioni relative allo stato del prodotto possono essere lette tramite:
•
HMI integrata
•
Software di messa in servizio
Nella memoria errori vengono memorizzati inoltre gli ultimi 10 eventi di
errore.
Significato dei messaggi di
avvertenza
Le avvertenze segnalano un problema rilevato da una funzione di monitoraggio. La causa di un'avvertenza deve essere eliminata.
L'avvertenza appartiene alla classe di errore 0 e non determina ancora
il cambio dello stato di funzionamento.
Significato delle segnalazioni di
errore
L'errore è una differenza rispetto al valore o allo stato prescritti. Gli errori
sono classificati in diverse classi di errore.
Classe di errore
Quando si verifica un errore il prodotto attiva una reazione ad errore. La
reazione dell'apparecchio dipende dalla gravità dell'errore secondo la
seguente suddivisione in classi di errore:
Classe
Reazione
di errore
Spiegazione
0
Avvertimento
Una funzione di monitoraggio ha rilevato un problema. Nessuna interruzione del movimento.
1
"Quick Stop"
Il motore si ferma in "Quick-Stop", lo stadio finale
rimane inserito.
2
"Quick Stop" con Il motore si ferma in "Quick-Stop", lo stadio finale
disinserimento si disinserisce quando viene raggiunto lo stato di
inattività.
3
Errore fatale
4
Funzionamento Lo stadio finale si disinserisce senza precedente
incontrollato
arresto del motore. L'errore può essere resettato
esclusivamente disinserendo l'apparecchio.
0198441113763, V1.02, 12.2009
Lo stadio finale si disinserisce senza precedente
arresto del motore.
Servoamplificatore AC
287
10 Diagnosi e rimozione delle anomalie
LXM32C
10.1.1 Diagnosi tramite l'HMI integrata
La figura che segue mostra una panoramica generale dei LED di stato
e del display di 7 segmenti dell'HMI integrata.
1
Fault
Op
Edit
Value
Unit
2
Mon
Conf
Illustrazione 10.1
Visualizzazione dello stato tramite l'HMI integrata
LED di stato "Fault"
Quando l'azionamento si trova nello stato di funzionamento Fault, il LED
di stato "Fault" (1) si accende.
Display di 7 segmenti
Tramite il display di 7 segmenti l'utente vengono trasmesse informazioni
all'utente.
Messaggi di avvertenza
Quando sono presenti avvertenze (classe di errore 0) entrambi i punti
destri del display di 7 segmenti lampeggiano (2). Le avvertenze non
vengono visualizzati sul display di 7 canali direttamente come numeri
d'errore, bensì devono essere richiesti dall'utente. Per ulteriori informazioni consultare il capitolo 10.3.1 "Lettura e conferma delle avvertenze"
a pagina 291.
Codici di errore
Sul display di 7 segmenti i numeri d'errore delle classi di errore da 1 a 4
lampeggiano alternandosi alla visualizzazione dello stato di funzionamento corrente. Per informazioni sulla conferma degli errori tramite
l'HMI integrata consultare il capitolo 10.3.2 "Lettura e conferma degli errori" a pagina 292.
Il significato dei numeri d'errore è riportato nel capitolo 10.4.1 "Tabella
delle avvertenze e degli errori" a pagina 294.
La seguente tabella contiene una panoramica generale dei messaggi
che è possibile visualizzare sull'HMI integrata.
0198441113763, V1.02, 12.2009
Messaggi sull'HMI integrata
288
Servoamplificatore AC
LXM32C
10 Diagnosi e rimozione delle anomalie
Messaggio
Descrizione
Card
I dati memorizzati nella memory card sono diversi da quelli presenti nel prodotto. Per sapere come procedere consultare il
capitolo 7.7.1 "Scambio di dati con la memory card" a pagina
174.
dis
Il prodotto si trova nello stato di funzionamento
3 Switch On Disabled. La tensione del bus DC è assente
oppure gli ingressi STO_A e STO_B non sono alimentati.
disp
È collegata un'HMI esterna. L'HMI integrata è disattivata.
flt
Il display lampeggia visualizzando alternativamente Flt (FLT) e
un codice d'errore a 4 cifre. Il significato dei codici d'errore è
descritto nel capitolo 10.4.1 "Tabella delle avvertenze e degli
errori" a pagina 294.
halt
Il motore viene arrestato con lo stadio finale attivo.
mot
È stato rilevato un nuovo motore. Per conoscere la procedura in
caso di sostituzione di un motore vedere il capitolo 10.3.3 "Conferma della sostituzione del motore" a pagina 293.
nrdy
Il prodotto non è pronto per l'inserimento (stato di funzionamento: 2 Not Ready To Switch On).
prot
Parte dell'HMI integrata è stata bloccata tramite il parametro
HMIlocked.
rdy
Stadio finale pronto per l'attivazione.
run
Il prodotto opera nel modo operativo impostato.
stop
Il display lampeggia visualizzando alternativamente stop
(STOP) e un codice d'errore a 4 cifre. Il significato dei codici
d'errore è descritto nel capitolo 10.4.1 "Tabella delle avvertenze
e degli errori".
ulow
Tensione dell'alimentazione di controllo insufficiente al
momento dell'inizializzazione.
Tabella 10.1 Tabella dei messaggi sull'HMI
Oltre ai messaggi riportati nella Tabella 10.1 l'HMI integrata permette di
visualizzare informazioni sui seguenti punti:
•
codici d'errore (vedere capitolo 10.4.1 "Tabella delle avvertenze e
degli errori" a pagina 294)
•
Etichette di menu (vedere il capitolo 7.3.2 "Struttura dei menu" a
pagina 130)
•
Nomi parametri (vedere capitolo 11 "Parametri" a pagina 311)
•
Valori dei parametri (ad esempio: corrente massima imax (IMAX))
10.1.2 Diagnosi con il software di messa in servizio
0198441113763, V1.02, 12.2009
I dettagli relativi all'interrogazione dello stato tramite il software di messa
in servizio sono riportati tra le informazioni relative al software di messa
in servizio.
Servoamplificatore AC
289
10 Diagnosi e rimozione delle anomalie
LXM32C
10.1.3 LED di stato del bus di campo
Generale
10.2
I LED di stato del bus di campo indicano lo stato del bus di campo.
Memoria errori
Generale
La memoria errori è uno storico delle ultime 10gli errori il cui contenuto
viene mantenuto anche al disinserimento del prodotto. Con l'ausilio
della memoria errori è possibile richiamare e valutare eventi passati.
Oltre agli eventi vengono memorizzate le seguenti informazioni:
•
Classe di errore
•
Codice errore
•
Corrente del motore
•
Numero cicli di attivazione
•
Informazioni supplementari sull'errore (ad es. numero parametro)
•
Temperatura prodotto
•
Temperatura stadio finale
•
Ora in cui si è verificato l'errore (riferite al contatore delle ore di
esercizio)
•
Tensione bus DC
•
Velocità
•
Numero di cicli Enable dall'inserimento
•
Tempo trascorso dall'Enable all'errore
I dati memorizzati descrivono la situazione al momento in cui si è verificato l'errore.
10.2.1 Lettura della memoria errori tramite il software di messa in servizio
0198441113763, V1.02, 12.2009
I dettagli relativi alla lettura della memoria errori tramite il software di
messa in servizio sono riportati tra le informazioni relative al software di
messa in servizio.
290
Servoamplificatore AC
LXM32C
10.3
10 Diagnosi e rimozione delle anomalie
Menu speciali dell'HMI integrata
Le funzioni descritte di seguito sono legate alla situazione. Esse sono
disponibili soltanto in presenza delle condizioni preliminari corrispondenti.
10.3.1 Lettura e conferma delle avvertenze
Le avvertenze possono essere letti e confermati tramite l'HMI interna
come descritto di seguito.
쮿 È attivo un'avvertenza. Entrambi i punti destri del display di 7 seg-
menti lampeggiano.
왘 Eliminare la causa dell'avvertenza.
왘 Tenere premuto il pulsante di navigazione.
컅 Sul display di 7 segmenti viene visualizzato il codice d'errore
dell'avvertenza.
왘 Rilasciare il pulsante di navigazione.
컅 Sul display di 7 segmenti compare fres.
왘 Premere il pulsante di navigazione per confermare l'avvertenza
컅 Il display di 7 segmenti torna alla visualizzazione di uscita.
1
2
Fault Edit Value Unit
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Op
Mon
Mon
Mon
Conf
Conf
Conf
>1s
4
3
Fault Edit Value Unit
Op
Mon
ESC
Illustrazione 10.2
(1)
(2)
(3)
(4)
Conf
Conferma delle avvertenze sull'HMI integrata
HMI visualizza un'avvertenza
Visualizzazione del codice d'errore
Conferma dell'avvertenza
Annullamento, l'avvertenza resta in memoria
0198441113763, V1.02, 12.2009
Per informazioni dettagliate sulle avvertenze consultare il capitolo
10.4.1 "Tabella delle avvertenze e degli errori" a pagina 294.
Servoamplificatore AC
291
10 Diagnosi e rimozione delle anomalie
LXM32C
10.3.2 Lettura e conferma degli errori
Per leggere e confermare gli errori tramite l'HMI integrata procedere
come descritto di seguito:
쮿 Il LED "Fault" si accende. Il display di 7 segmenti lampeggia alter-
nando flt e un codice d'errore. Si è verificata un errore di classe
da 2 a 4.
왘 Eliminare la causa dell'errore.
왘 Premere il pulsante di navigazione.
컅 Sul display di 7 segmenti viene visualizzato fres.
왘 Premere il pulsante di navigazione per confermare l'errore.
컅 Il prodotto passa allo stato di funzionamento
4 Ready To Switch On.
1
Fault Edit Value Unit
ESC
Op
Mon
Mon
Conf
Conf
ESC
ESC
Fault Edit Value Unit
Fault Edit Value Unit
Op
Op
Mon
Mon
Conf
Conf
Illustrazione 10.3
(1)
Fault Edit Value Unit
Op
Conferma degli errori sull'HMI integrata
HMI visualizza un errore con numero errore
0198441113763, V1.02, 12.2009
Il significato dei numeri d'errore può essere appreso dalla tabella nel capitolo 10.4.1 "Tabella delle avvertenze e degli errori" a pagina 294.
292
Servoamplificatore AC
LXM32C
10 Diagnosi e rimozione delle anomalie
10.3.3 Conferma della sostituzione del motore
Per confermare un cambio di motore tramite l'HMI integrata procedere
come descritto di seguito:
쮿 Sul display di 7 segmenti compare mot.
왘 Premere il pulsante di navigazione.
컅 Sul display di 7 segmenti viene visualizzato save.
왘 Premere il pulsante di navigazione per memorizzare i nuovi para-
metri motore nell'EEPROM.
컅 Il prodotto passa allo stato di funzionamento
4 Ready To Switch On.
1
Fault Edit Value Unit
Fault Edit Value Unit
Op
2
Mon
Conf
Op
Mon
ESC
Conf
2
3
ESC
Fault Edit Value Unit
Op
Mon
Conf
Illustrazione 10.4
(1)
L'HMI indica che è stata riconosciuta la sostituzione di un motore
Interruzione del processo di memorizzazione
Memorizzazione dei nuovi dati motore e passaggio allo stato
di funzionamento 4 Ready To Switch On.
0198441113763, V1.02, 12.2009
(2)
(3)
Conferma di un cambio motore sull'HMI integrata
Servoamplificatore AC
293
10 Diagnosi e rimozione delle anomalie
10.4
LXM32C
Risoluzione dei problemi
10.4.1 Tabella delle avvertenze e degli errori
Nella seguente tabella sono riportati i codici d'errore suddivisi per settore.
Codice errore non presente
nell'elenco
Codice errore
Settore
E 1xxx
Generale
E 2xxx
Sovracorrente
E 3xxx
Tensione
E 4xxx
Temperatura
E 5xxx
Hardware
E 6xxx
Software
E 7xxx
Interfaccia, cablaggio
E Axxx
Movimento motore
E Bxxx
Comunicazione
Se un codice errore non è presente nella seguente tabella è possibile
che il firmware sia di una versione più recente di quella considerata nel
manuale del prodotto o che vi sia un errore di sistema.
왘 Verificare che si utilizzi il manuale corretto ( "Informazioni sul
manuale")
왘 Verificare che il cablaggio sia stato effettuato secondo le misure
EMC (5.1 "Compatibilità elettromagnetica, CEM").
왘 Contattare l'Assistenza Tecnica (13.1 "Indirizzi di assistenza tec-
nica")
La seguente tabella offre una panoramica generale dei codici d'errore.
Codice
errore
Classe
Breve descrizione
di errore
Causa
Soluzione
E 1100
-
Parametro non compreso nel
campo di valori ammesso
Il valore immesso non rientra
nell'intervallo ammesso per
questo parametro.
Il valore immesso deve rientrare nell'intervallo ammesso.
E 1101
-
Parametro inesistente
Il sistema di gestione dei para- Selezionare un altro parametro
metri segnala un'errore: il
(indice).
parametro (indice) non esiste.
E 1102
-
Parametro inesistente
Il sistema di gestione dei para- Selezionare un altro parametro
metri segnala un'errore: il
(sottoindice).
parametro (sottoindice) non
esiste.
E 1103
-
Scrittura del parametro non
ammessa (READ only)
Accesso in scrittura sul parametro Read-Only.
E 1104
-
Accesso scrittura negato (nes- Il parametro è accessibile solo Necessario accesso in scritsun diritto di accesso)
in modalità per utenti esperti. tura per utenti esperti.
E 1106
-
Istruzione non abilitata quando Istruzione non consentita men- Disattivare lo stadio finale e
ripetere l'istruzione.
lo stadio finale è attivo
tre lo stadio finale è attivo
(stato di funzionamento Operation Enabled o Quick Stop
Active).
294
Scrivere solo in parametri
accessibili in scrittura.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Elenco dei codici errore
LXM32C
10 Diagnosi e rimozione delle anomalie
Classe
Breve descrizione
di errore
Causa
E 1107
-
Accesso bloccato da un'altra
interfaccia
L'accesso da un altro canale è Verificare il canale che blocca
occupato (esempio: il software l'accesso.
di messa in servizio è attivo e
contemporaneamente il bus di
campo effettua un tentativo di
accesso).
E 110B
3
Errore di configurazione (info Errore riscontrato durante la
suppl.= indirizzo registro Mod- verifica dei parametri (esempio: la velocità nominale per il
bus)
modo operativo Profile Position
Parametro _SigLatched bit è maggiore della velocità mas30
sima ammessa dell'azionamento).
E 110D
1
Configurazione base dell'azio- "First Setup" (FSU) non è stato Eseguire un First Setup.
namento necessaria dopo
eseguito completamente o non
l'impostazione di fabbrica.
è stato eseguito.
E 110E
-
È stato modificato un parame- Viene visualizzato soltanto dal
tro che richiede il riavvio del
software di messa in servizio.
azionamento.
Dopo la modifica di un parametro l'azionamento deve essere
disinserito e poi reinserito.
E 1110
-
ID file sconosciuto per l'Upload Questo modello di apparecchio Verificare che siano utilizzati il
o il Download
non supporta questo tipo di
tipo di apparecchio corretto o il
file.
file di configurazione corretto.
E 1112
-
Impossibile bloccare la configurazione
E 1114
4
Download della configurazione interrotto
E 1118
-
Dati di configurazione non
compatibili con l'apparecchio
I dati di configurazione conten- Verificare il tipo di apparecchio
gono dati di un altro apparec- e il tipo di stadio finale.
chio
E 111B
4
Errore durante il download
della configurazione (informazione supplementare = indirizzo registro Modbus)
Durante il download di una
configurazione uno o più valori
di configurazione non sono
stati acquisiti dall'azionamento.
0198441113763, V1.02, 12.2009
Codice
errore
Servoamplificatore AC
Soluzione
Il valore nelle informazioni supplementari sull'errore indica
l'indirizzo registro Modbus del
parametro in cui è stato rilevato l'errore di inizializzazione.
Riavviare l'azionamento per
attivare la funzione del parametro.
Vedere il capitolo Parametri
per informazioni sul parametro
che richiede il riavvio dell'azionamento.
Un dispositivo esterno ha tentato di bloccare la configurazione dell'azionamento per
l'Upload o il Download. Se un
altro dispositivo ha già bloccato
la configurazione dell'azionamento o se l'azionamento si
trova in uno stato di funzionamento che non consente il
blocco, la configurazione non
può essere bloccata.
Durante il download di una
configurazione si sono verificati un errore di comunicaParametro _SigLatched bit 5 zione o un errore nel tool
esterno. La configurazione è
stata trasmessa soltanto in
parte all'azionamento e
potrebbe essere incongruente.
Disinserire l'azionamento e
reinserirlo, quindi tentare di
eseguire nuovamente il
download della configurazione
o reimpostare i parametri
dell'azionamento sulle impostazioni di fabbrica.
Verificare che il file di configurazione sia valido e adatto al
tipo e alla versione dell'azionamento. Il valore nelle informazioni supplementari sull'errore
indica l'indirizzo registro Modbus del parametro in cui è
stato rilevato l'errore di inizializzazione.
295
10 Diagnosi e rimozione delle anomalie
LXM32C
Codice
errore
Classe
Breve descrizione
di errore
Causa
E 1300
3
La funzione di sicurezza STO è Verificare il cablaggio degli
stata attivata nello stato di fun- ingressi della funzione di sicuzionamento Operation Enarezza STO e azzerare l'errore.
bled.
Funzione di sicurezza STO
attivata (STO_A, STO_B)
Parametro _SigLatched bit
10
4
STO_A e STO_B con livelli
diversi
Parametro _SigLatched bit
11
I livelli degli ingressi STO_A e
STO_B sono stati diversi per
più di 1 secondo.
Disinserire l'azionamento e,
prima di reinserirlo, eliminare
la causa dell'errore (ad esempio controllare se sia attivo
l'arresto di emergenza).
La funzione di sicurezza STO è L'avvertenza viene azzerato
automaticamente nel momento
stata attivata con lo stadio
in cui la funzione di sicurezza
finale disattivato.
Parametro _WarnLatched bit
STO viene disattivata.
10
E 1302
0
Funzione di sicurezza STO
attivata (STO_A, STO_B)
E 1310
2
Frequenza dei segnali di guida La frequenza del segnale di
impulso (A/B, impulso/diretroppo alta
zione, CW/CCW) è più alta del
Parametro _SigLatched bit valore ammesso.
28
E 1311
-
Configurazione della funzione
di ingresso/uscita segnale
selezionata non consentita
La funzione di ingresso/uscita Selezionare un'altra funzione o
segnale non può essere utiliz- cambiare modo operativo.
zata nel modo operativo corrente.
E 1312
-
Segnale di fine corsa o
segnale interruttore di riferimento non definiti per la funzione di ingresso segnale
Gli movimenti verso riferimento
richiedono interruttori di finecorsa. Agli ingressi non è assegnato alcun interruttore di
finecorsa.
Assegnare le funzioni di
ingresso segnale a interruttori
di finecorsa positivi (Positive
Limit Switch) e negativi (Negative Limit Switch) e a interruttori di riferimento (Reference
Switch).
E 1313
-
Il tempo di antirimbalzo configurato non può essere utilizzato con questa funzione di
ingresso segnale
La funzione di ingresso
segnale per questo ingresso
non supporta il tempo di antirimbalzo scelto.
Impostare il tempo di antirimbalzo su un valore valido.
E 1314
4
Almeno due ingressi segnale
hanno la stessa funzione di
ingresso segnale.
Per almeno due ingressi
segnale è stata configurata la
stessa funzione di ingresso
segnale.
Riconfigurare gli ingressi.
E 1315
0
La frequenza del segnale di
Frequenza del segnale di
guida troppo alta (avvertenza) impulso (A/B, impulso/direzione, CW/CCW) non rientra
Parametro _WarnLatched bit nella corsa utile specificata. Gli
28
impulsi ricevuti andranno probabilmente persi.
E 160C
1
Autotuning: momento d'inerzia Il momento di inerzia del carico Verificare che il sistema abbia
oltre il campo consentito
è troppo alto.
libertà di movimento.
Controllare il carico.
Utilizzare un apparecchio di
diverse dimensioni.
296
Adattare la frequenza di uscita
del controller alla frequenza di
ingresso del azionamento.
Adattare inoltre il rapporto di
trasmissione per il modo operativo Electronic Gear ai requisiti dell'applicazione
(precisione della posizione e
velocità).
Adattare la frequenza di uscita
del controller alla frequenza di
ingresso del azionamento.
Adattare inoltre il rapporto di
trasmissione per il modo operativo Electronic Gear ai requisiti dell'applicazione
(precisione della posizione e
velocità).
Servoamplificatore AC
0198441113763, V1.02, 12.2009
E 1301
Soluzione
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E 160F
1
Avviare l'autotuning se l'azioAutotuning: impossibile attivare L'autotuning non è stato
lo stadio finale
avviato nello stato di funziona- namento si trova nello stato di
funzionamento Ready to
mento Ready to Switch On.
Switch On.
E 1610
1
Eliminare la causa dell'arresto
Autotuning: modifica annullata Autotuning annullato dietro
e riavviare l'autotuning.
istruzione dell'utente o interrotto a causa di un messaggio
d'errore nell'azionamento
(vedere messaggio d'errore
aggiuntivo nella memoria
errori, ad esempio sottotensione, interruttore di finecorsa
attivato)
E 1611
1
Errore di sistema: accesso in
scrittura interno Autotuning
È stato scritto un parametro di
Autotuning mentre HALT era
attivo. Si verifica all'avvio
dell'Autotuning.
E 1613
1
Autotuning: campo di movimento massimo consentito
superato
Durante l'autotuning è stato
eseguito un movimento
all'esterno del campo di movimento impostato.
0198441113763, V1.02, 12.2009
Parametro _SigLatched bit 2
Causa
Soluzione
Aumentare il valore relativo al
campo di movimento o disattivare il controllo del campo con
AT_DIS = 0.
Attendere la fine dell'autotuL'Autotuning è stato avviato
ning e riavviare l'autotuning.
due volte oppure nel corso
dell'operazione è stato modificato un parametro (parametri
AT_dis e AT_dir).
E 1614
-
Autotuning: già attivo
E 1615
-
Autotuning: questo parametro I parametri AT_gain o AT_J
non può essere modificato fin- vengono scritti durante l'autoché l'Autotuning è attivo
tuning.
Attendere la fine dell'autotuning, quindi modificare il parametro.
E 1617
1
Autotuning: coppia di frizione o È stata raggiunta la corrente
del carico troppo elevati
massima (parametro
CTRL_i_max).
Verificare che il sistema abbia
libertà di movimento.
Controllare il carico.
Utilizzare un apparecchio di
diverse dimensioni.
E 1618
1
Autotuning: ottimizzazione
interrotta
Per informazioni supplementari
Il processo di autotuning
interno non è stata completato sull'errore leggere la memoria
errori.
(errore d'inseguimento?).
E 1619
-
Autotuning: la variazione di
velocità nel parametro
AT_n_ref è troppo piccola
rispetto a quella nel parametro
AT_n_tolerance
Parametro AT_n_ref < 2 *
AT_n_tolerance.
Verifica eseguita una sola volta
durante la prima variazione di
velocità.
E 1620
1
Autotuning: coppia del carico
troppo elevata
Ridurre il carico, controllare il
Dimensionamento del prodotto non adatto al carico della dimensionamento.
macchina.
Il momento di inerzia della
macchina rilevato è troppo alto
rispetto al momento di inerzia
del motore.
E 1622
-
Autotuning: impossibile eseguire l'autotuning
Terminare il modo operativo
L'autotuning non può essere
eseguito se non è attivo alcun corrente o disattivare lo stadio
finale.
modo operativo.
E 1623
1
Terminare il modo operativo
L'autotuning non può essere
Autotuning: interruzione
dell'autotuning causata da una eseguito se non è attivo alcun corrente o disattivare lo stadio
finale.
modo operativo.
richiesta di ARRESTO
Servoamplificatore AC
Modificare i parametri
AT_n_ref e/o AT_n_tolerance
per ottenere lo stato desiderato.
297
10 Diagnosi e rimozione delle anomalie
LXM32C
Codice
errore
Classe
Breve descrizione
di errore
Causa
Soluzione
E 1A01
3
Il motore rilevato è diverso da
quello rilevato in precedenza.
Confermare il cambio di
motore.
Il parametro CTRL_v_max è
troppo piccolo oppure la risoluzione della simulazione encoder è troppo elevata.
Ridurre la risoluzione della
simulazione encoder o la velocità massima nel parametro
CTRL_v_max.
Cortocircuito motore e disattivazione dello stadio finale.
Fasi motore invertite.
Verificare il allacciamento rete
del motore.
Parametro _SigLatched bit
16
E 1B04
2
Risoluzione della simulazione
encoder troppo elevata
Parametro _SigLatched bit
30
E 1B0C
3
Velocità effettiva del motore
troppo elevata
E 2300
3
Sovracorrente stadio finale
Parametro _SigLatched bit
27
E 2301
3
Sovracorrente resistenza di
frenatura
Parametro _SigLatched bit
27
Cortocircuito resistenza di fre- Se si utilizza la resistenza di
natura
frenatura interna rivolgersi al
servizio di assistenza tecnica.
Se si utilizza una resistenza di
frenatura esterna verificarne il
cablaggio e il dimensionamento.
E 3100
par.
Alimentazione dalla rete: una o Fase/i del motore assente/i.
più fasi della rete assenti o ten- La tensione di rete è insuffisione di rete errata
ciente.
La frequenza di rete non rienParametro _SigLatched bit tra nell'intervallo valido.
15
La tensione di rete o il valore
del parametro
Umains_reduced non sono
adeguati (la tensione di rete è
pari a 230 V e
Umains_reduced è impostato
su 1 oppure la tensione di rete
è pari a 115 V e
Umains_reduced è impostato
su 0).
Verificare che la tensione della
rete di alimentazione corrisponda ai dati tecnici.
Verificare l'impostazione dei
parametri per la tensione di
rete ridotta.
E 3200
3
Sovratensione nel bus DC
Eccessivo rigenerazione di
energia all'attivazione del
freno.
Verificare la rampa di decelerazione, il dimensionamento
dell'azionamento e la resistenza di frenatura
Perdita della tensione di alimentazione, alimentazione di
tensione insufficiente
Verificare l'alimentazione dalla
rete.
Perdita della tensione di alimentazione, alimentazione di
tensione insufficiente
Verificare l'alimentazione dalla
rete.
Parametro _SigLatched bit
14
E 3201
3
Sottotensione bus DC (soglia
disattivazione)
Parametro _SigLatched bit
13
E 3202
2
Sottotensione bus DC (soglia
Quickstop)
Parametro _SigLatched bit
13
E 3206
0
Sottotensione bus DC (avvertenza)
Parametro _WarnLatched bit
13
E 4100
298
3
Verificare l'alimentazione dalla
Tensione di alimentazione
assente, alimentazione di ten- rete.
sione difettosa/errata.
Sovratemperatura stadio finale Sovratemperatura transistori: Controllare il ventilatore,
temperatura ambiente ecces- migliorare la dissipazione del
Parametro _SigLatched bit siva, guasto al ventilatore, pol- calore dall'armadio elettrico.
18
vere.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Il motore è stato sostituito
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E 4101
0
Avvertenza sovratemperatura
stadio finale
Soluzione
E 4102
0
Controllare il dimensionaSovraccarico dello stadio finale La corrente ha superato il
valore nominale per un periodo mento, ridurre il tempo di ciclo.
(l2t)
di tempo prolungato.
Parametro _WarnLatched bit
30
E 4200
3
Sovratemperatura apparecchio Sovratemperatura schede:
temperatura ambiente eccesParametro _SigLatched bit siva.
18
E 4300
2
Sovratemperatura motore
Sovratemperatura transistori: Controllare il ventilatore,
temperatura ambiente ecces- migliorare la dissipazione del
siva, guasto al ventilatore, pol- calore dall'armadio elettrico.
Parametro _WarnLatched bit vere.
18
Parametro _SigLatched bit
17
La temperatura ambiente è
troppo alta.
La durata d'inserimento è
troppo elevata.
Motore non correttamente
montato (isolamento termico).
Sovraccarico del motore
(potenza dissipata eccessiva).
Resistenza eccessiva del sensore di temperatura; sovraccarico, temperatura ambiente
Parametro _WarnLatched bit (vedere I2t).
17
Controllare il ventilatore,
migliorare la dissipazione del
calore dall'armadio elettrico.
Verificare l'installazione del
motore, il calore deve essere
eliminato dalla superficie di
montaggio. Ridurre la temperatura ambiente. Provvedere alla
ventilazione.
Verificare l'installazione del
motore, il calore deve essere
eliminato dalla superficie di
montaggio.
E 4301
0
Avvertenza sovratemperatura
motore
E 4302
0
La corrente ha superato il
Verificare che il sistema abbia
valore nominale per un periodo libertà di movimento.
Parametro _WarnLatched bit di tempo prolungato.
Controllare il carico.
31
Se necessario, utilizzare un
motore di diverse dimensioni.
E 4402
0
Avvertenza: sovraccarico resi- La resistenza di frenatura è
stenza di frenatura (I2t > 75%) stata inserita talmente a lungo
che il 75% della sua sovraccaParametro _WarnLatched bit ricabilità è esaurito.
29
E 4403
par.
L'energia rialimentata è troppo
Sovraccarico resistenza di fre- La resistenza di frenatura è
natura (I2t > 100%)
stata attivata per troppo tempo. elevata. Possibili cause: carico
esterno eccessivo, velocità
motore eccessiva, decelerazione troppo rapido.
E 5101
0
Alimentazione di tensione per
Modbus assente
E 5102
4
Tensione di alimentazione
encoder motore
Sovraccarico del motore (l2t)
Parametro _SigLatched bit
16
E 5200
0198441113763, V1.02, 12.2009
Causa
4
Errore nel collegamento tra
motore ed encoder
L'energia rialimentata è troppo
elevata. Possibili cause: carico
esterno eccessivo, velocità
motore eccessiva, decelerazione troppo rapido.
L'alimentazione di tensione
dell'encoder non rientra
nell'intervallo ammesso compreso tra 8 V e 12 V; è probabile che vi sia un problema
hardware.
Sostituire l'apparecchio.
Contattare l'Assistenza Tecnica.
Cavo encoder errato o cavo
non collegato, CEM.
Verificare il collegamento del
cavo e lo schermo.
Parametro _SigLatched bit
16
E 5201
4
Errore nella comunicazione
con l'encoder motore
Parametro _SigLatched bit
16
Servoamplificatore AC
segnalazione d'errore encoder: Verificare il collegamento del
errore di comunicazione rilecavo e lo schermo.
vato dall'encoder stesso.
299
10 Diagnosi e rimozione delle anomalie
LXM32C
Codice
errore
Classe
Breve descrizione
di errore
Causa
Soluzione
E 5202
4
È stato collegato un encoder
non compatibile.
Utilizzare accessori originali.
Problemi con il cavo encoder
(la comunicazione è stata
interrotta).
Verificare il collegamento del
cavo.
Encoder motore non supportato
Parametro _SigLatched bit
16
E 5204
3
Collegamento con encoder
motore perso
Parametro _SigLatched bit
16
E 5206
0
Errore di comunicazione enco- Comunicazione disturbata,
der
CEM.
Verificare il collegamento e lo
schermo della piastra CEM.
Parametro _WarnLatched bit
16
E 5302
4
Il motore collegato richiede
una frequenza PWM pari a 16
kHz, ma lo stadio finale non
supporta questa frequenza
PWM.
E 544C
4
Errore di sistema: EEPROM
protetta da scrittura
Il motore collegato opera sol- Utilizzare un motore che operi
tanto con una frequenza PWM con una frequenza PWM pari a
pari a 16 kHz (valore registrato 8 kHz.
nella targhetta elettronica del
motore). Lo stadio finale tuttavia non supporta questa frequenza PWM.
Parametro _SigLatched bit
29
E 5451
0
Errore di sistema: nessuna
memory card disponibile
Parametro _WarnLatched bit
20
E 5452
2
Errore di sistema: i dati della
memory card e quelli
dell'apparecchio non sono
compatibili
Parametro _SigLatched bit
20
E 5453
2
Tipo di apparecchio differente.
Tipo di stadio finale differente.
I dati della memory card non
sono compatibili con la versione firmware dell'apparecchio.
Errore di sistema: dati incompatibili sulla memory card
Parametro _SigLatched bit
20
2
Errore di sistema: memory
card non formattata
Aggiornare la memory card
con il comando "dtoc" (driveto-card) sull'HMI.
Parametro _SigLatched bit
20
E 5456
1
Errore di sistema: memory
card protetta da scrittura
La memory card è stata protetta da scrittura.
Parametro _SigLatched bit
20
E 5600
3
Errore di fase attacco di colle- Fase motore assente.
gamento motore
Rimuovere la memory card o
disattivare la protezione da
scrittura tramite l'HMI.
Verificare il collegamento delle
fasi motore.
Parametro _SigLatched bit
26
300
Servoamplificatore AC
0198441113763, V1.02, 12.2009
E 5455
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
Causa
Soluzione
E 5603
3
Errore di cablaggio del cavo
motore.
I segnali dell'encoder vanno
perduti a causa di accoppiamenti di disturbo.
La coppia del carico è maggiore della coppia del motore.
L'EEPROM dell'encoder contiene dati non validi (disposizione errata delle fase
dell'encoder).
Motore non tarato.
Controllare le fase del motore,
controllare il cablaggio
dell'encoder.
Verificare la CEM e apportare
le modifiche eventualmente
necessarie; controllare la
messa a terra e lo schermo.
Controllare il dimensionamento
del motore, che deve essere
adatto alla coppia del carico.
Verificare i dati del motore.
Contattare l'Assistenza Tecnica.
Valore parametro selezionato
non corretto.
Verificare il valore del parametro da scrivere.
Errore di commutazione
Parametro _SigLatched bit
26
E 610D
-
Errore nel parametro di selezione
E 610E
4
Errore di sistema: 24 VDC al di
sotto della soglia di tensione
per disinserimento
E 7100
4
Errore di sistema: dati stadio
finale non validi
Parametro _SigLatched bit
30
E 7111
-
Il valore del parametro non può
essere modificato perché la
resistenza di frenatura esterna
è attiva.
Si è tentato di modificare i
parametri RESext_ton,
RESext_P o RESext_R nonostante sia attiva la resistenza di
frenatura esterna.
Per poter modificare uno dei
parametri RESext_ton,
RESext_P o RESext_R la resistenza di frenatura non deve
essere attiva.
E 7112
2
Nessuna resistenza di frenatura esterna collegata
La resistenza di frenatura
esterna è stata attivata (parametro RESint_ext), ma non è
stata rilevata alcuna resistenza
di frenatura esterna.
Controllare il cablaggio della
resistenza di frenatura esterna.
Verificare che il valore della
resistenza sia corretto.
E 7120
4
Dati motore non validi
Dati motore non corretti (CRC Contattare l'Assistenza Tecerrato).
nica o sostituire il motore.
Parametro _SigLatched bit
16
E 7121
2
Errore di sistema: errore nella
comunicazione tra motore ed
encoder
Parametro _SigLatched bit
16
E 7122
E 7124
0198441113763, V1.02, 12.2009
Dati dello stadio finale salvati Contattare l'Assistenza Tecnica o sostituire l'apparecchio.
nell'apparecchio non corretti
(CRC errato); l'errore si è verificato nei dati di memoria
interni.
4
4
Dati motore non validi
CEM; le indicazioni dettagliate Contattare l'Assistenza Tecsi trovano nella memoria errori nica.
che contiene il codice d'errore
dell'encoder.
Parametro _SigLatched bit
30
Dati motore salvati nell'encoder non corretti; l'errore si è
verificato nei dati di memoria
interni.
Contattare l'Assistenza Tecnica o sostituire il motore.
Errore di sistema: errore
nell'encoder motore
L'encoder segnala un'errore
interno.
Contattare l'Assistenza Tecnica o sostituire il motore.
Parametro _SigLatched bit
16
E 712D
4
Targhetta elettronica del
motore non trovata
Parametro _SigLatched bit
16
Servoamplificatore AC
Dati motore non corretti (CRC Contattare l'Assistenza Tecnica o sostituire il motore.
errato).
Motore privo di targhetta elettronica (ad esempio motore
SER)
301
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E 7134
4
LXM32C
Causa
Soluzione
L'encoder ha un rilevato un
problema durante la valutazione di posizione.
Contattare l'Assistenza Tecnica o sostituire il motore.
Configurazione motore incompleta
Parametro _SigLatched bit
16
E 7138
4
Parametro della configurazione
motore non compreso nel
campo di valori ammesso
Parametro _SigLatched bit
16
E 7139
0
Encoder-Offset: segmento dei
dati difettoso nell'encoder.
E 7328
4
Encoder motore: errore nella
valutazione di posizione
Parametro _SigLatched bit
16
E 7329
0
Encoder motore: avvertenza
Parametro _WarnLatched bit
16
E 734C
3
Errore con posizione quasi
assoluta
Parametro _SigLatched bit
16
E 734D
0
CEM, l'encoder motore
Contattare l'Assistenza Tecsegnala un'avvertenza interna. nica o sostituire il motore.
Probabilmente l'albero motore
è stato girato mentre l'azionamento era disinserito. È stata
scoperta una posizione quasi
assoluta al di fuori del campo
di spostamento ammesso
dell'albero motore.
Con funzione posizione quasi
assoluta attiva, disinserire
l'azionamento solo quando il
motore è fermo e non muovere
l'albero motore quando l'azionamento è disinserito.
Impulso di posizione non
disponibile per l'encoder
Parametro _WarnLatched bit
16
E 7500
0
RS485/Modbus: errore di over- CEM, problema di cablaggio.
run
Controllare il cavo.
Parametro _WarnLatched bit
5
E 7501
0
RS485/Modbus: errore di Fra- CEM, problema di cablaggio.
ming
Controllare il cavo.
Parametro _WarnLatched bit
5
E 7502
0
RS485/Modbus: errore di
Parity
CEM, problema di cablaggio.
Controllare il cavo.
RS485/Modbus: errore di rice- CEM, problema di cablaggio.
zione
Controllare il cavo.
E 7503
0
Parametro _WarnLatched bit
5
E 7623
0
Il segnale assoluto dell'encoder non sarà disponibile
Parametro _WarnLatched bit
22
302
All'ingresso encoder specifiControllare il cablaggio, concato in AbsPosEncSource non trollare l'encoder. Modificare il
è disponibile nessun encoder. valore di AbsPosEncSource.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Parametro _WarnLatched bit
5
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
Causa
E 7625
0
Impossibile impostare la posi- All'ingresso per l'encoder 1
zione assoluta per l'encoder 1. non è collegato nessun encoder.
Parametro _WarnLatched bit
22
E 8291
0
CANopen: impossibile elaborare TxPdo
Soluzione
Prima di impostare la posizione assoluta direttamente
tramite ENC1_abs_pos, collegare un encoder all'ingresso
per l'encoder 1.
Parametro _WarnLatched bit
21
E 8292
0
CANopen: impossibile elaborare TxPdo
Parametro _WarnLatched bit
21
E 8293
0
CANopen: impossibile elaborare TxPdo
Parametro _WarnLatched bit
21
E A060
2
Velocità calcolata per il modo
operativo Electronic Gear
troppo elevata
Rapporto di trasmissione o
Ridurre il rapporto di trasmisvalore di velocità troppo elevati sione o il valore di consegna.
Parametro _SigLatched bit 4
E A061
2
Variazione di posizione eccessiva nel valore di consegna nel
modo operativo Electronic
Gear.
Eccessiva modifica del valore
di consegna di posizione.
Errore sull'ingresso segnale
per il valore di consegna.
Ridurre la risoluzione del
Master.
Controllare l'ingresso segnale
per il segnale di guida.
0198441113763, V1.02, 12.2009
Parametro _SigLatched bit 4
E A300
-
Operazione die frenata ancora HALT è stato attivato troppo
attiva dopo la richiesta di arre- presto.
sto
È già stata inviata una nuova
istruzione prima che fosse raggiunto l'arresto del motore
dopo un HALT.
E A301
-
Azionamento nello stato di fun- Si è verificata un errore di
zionamento Quick Stop active classe 1.
Azionamento arrestato con
Quick Stop.
E A302
1
Arresto mediante interruttore di L'interruttore di finecorsa posifinecorsa positivo
tivo è stato attivato poiché il
campo di movimento è stato
Parametro _SigLatched bit 1 oltrepassato, per funzionamento errato dell'interruttore di
finecorsa o per un disturbo del
segnale.
Verificare l'applicazione.
Verificare la funzione e la connessione dell'interruttore di
finecorsa.
E A303
1
Arresto mediante interruttore di L'interruttore di finecorsa negafinecorsa negativo
tivo è stato attivato poiché il
campo di movimento è stato
Parametro _SigLatched bit 1 oltrepassato, per funzionamento errato dell'interruttore di
finecorsa o per un disturbo del
segnale.
Verificare l'applicazione.
Verificare la funzione e la connessione dell'interruttore di
finecorsa.
E A305
-
Impossibile attivare lo stadio
finale nello stato di funzionamento corrente
Servoamplificatore AC
Prima di ripristinare il segnale
HALT, attendere che l'arresto
del motore sia completo.
Attendere finché il motore non
è completamente fermo.
Bus di campo: tentativo di atti- Vedere diagramma di stato.
vare lo stadio finale nello stato
di funzionamento Not ready to
switch on.
303
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E A306
1
Arresto mediante arresto software attivato dall'utente
E A307
-
Arresto mediante arresto software interno
E A308
-
L'azionamento si trova nello
Si è verificata un errore di
stato di funzionamento Fault o classe 2 o superiore.
Fault Reaction Active
Verificare il codice d'errore
(HMI o software di messa in
servizio), rimuovere la causa
dell'errore e disattivare lo stato
d'errore con l'istruzione Fault
Reset.
E A309
-
Azionamento non nello stato di È stata inviata un'istruzione la
funzionamento Operation Ena- cui esecuzione presuppone
bled
che l'azionamento si trovi nello
stato di funzionamento Operation Enabled (ad esempio
un'istruzione di modifica del
modo operativo).
Impostare l'azionamento sullo
stato di funzionamento Operation Enabled e ripetere l'istruzione.
E A310
-
Stadio finale non attivo
Impostare l'azionamento in
uno stato di funzionamento
con stadio finale attivo; vedere
il diagramma di stato.
E A313
-
Posizione superata, il punto di I limiti del campo di movimento Definire un nuovo punto di riferiferimento non può più essere sono stati superati, pertanto il rimento nel modo operativo
definito (ref_ok=0)
punto di riferimento è andato Homing.
perduto. Un movimento assoluto è possibile soltanto dopo
aver definito un nuovo punto di
riferimento.
E A314
-
Punto di riferimento assente
E A315
-
Modo operativo Homing attivo L'istruzione non è consentita
Attendere finché il movimento
se il modo operativo Homing è verso riferimento non si conattivo.
clude.
E A317
-
Motore non in stato di arresto
304
Causa
LXM32C
Soluzione
Dopo una richiesta di arresto Disattivare lo stato d'errore con
l'istruzione Fault Reset.
tramite il software, l'azionamento si trova nello stato di
Parametro _SigLatched bit 3 funzionamento Quick Stop
Active. Non è possibile attivare
un nuovo modo operativo, il
codice errore viene inviato in
risposta all'istruzione di attivazione.
Disattivare lo stato d'errore con
Nei modi operativi Homing o
Jog il movimento viene inter- l'istruzione Fault Reset.
rotto mediante un arresto software interno. Non è possibile
attivare un nuovo modo operativo, il codice errore viene
inviato in risposta all'istruzione
di attivazione.
L'istruzione richiede un punto
di riferimento definito
(ref_ok=1).
Definire un nuovo punto di riferimento nel modo operativo
Homing.
Attendere finché il motore non
È stata inviata un'istruzione
non consentita finché il motore si troverà in stato di arresto
(x_end = 1).
si trova in stato di arresto.
Ad esempio:
- modifica del finecorsa software
- modifica della manipolazione
dei segnali di monitoraggio
- impostazione di un punto di
riferimento
- Teach-in di un record di dati
Servoamplificatore AC
0198441113763, V1.02, 12.2009
L'istruzione non può essere
eseguita poiché lo stadio finale
non è attivo (stato di funzionamento Operation Enabled o
Quick Stop Active).
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E A318
-
Attendere che l'istruzione
Modo operativo attivo (x_end = Il nuovo modo operativo non
venga eseguita nel modo ope0)
può essere attivato finché è
attivo l'attuale modo operativo. rativo (x_end=1)
o terminare il modo operativo
corrente con l'istruzione HALT.
E A319
1
Tuning manuale/autotuning:
movimento fuori dall'intervallo
ammesso
0198441113763, V1.02, 12.2009
Parametro _SigLatched bit 2
Causa
Soluzione
Il movimento oltrepassa il
Controllare il valore ammesso
campo di movimento massimo per il campo di movimento e
ammesso definito nei parame- l'intervallo temporale.
tri.
E A31A
-
Tuning/Autotuning manuale:
impostazione ampiezza/offset
troppo alta/o
L'ampiezza e l'offset per il
tuning superano i valori limite
interni per la velocità o la corrente.
E A31B
-
Richiesto HALT
Istruzione non consentita se è Annullare la richiesta di arresto
presente una richiesta di arre- e ripetere l'istruzione.
sto.
E A31C
-
Impostazione posizione non
ammessa per finecorsa software
Il valore corrispondente al fine- Correggere i valori di posicorsa software negativo (posi- zione.
tivo) è maggiore (minore) del
valore corrispondente al finecorsa software positivo (negativo).
E A31D
-
Campo di velocità oltrepasLa velocità è stata impostata
sato (parametri CTRL_n_max, su un valore maggiore della
M_n_max)
velocità massima ammessa
(valore più basso dei parametri
CTRL_n_max o M_n_max).
Se il valore del parametro
M_n_max è maggiore del
valore del parametro
CTRL_n_max, aumentare il
parametro CTRL_n_max o
ridurre il valore di velocità.
E A31E
1
Arresto mediante finecorsa
software positivo
L'istruzione non può essere
eseguita a causa del superamento del finecorsa software
Parametro _SigLatched bit 2 positivo.
Tornare nell'intervallo
ammesso.
E A31F
1
Arresto mediante finecorsa
software negativo
L'istruzione non può essere
eseguita a causa del superamento del finecorsa software
Parametro _SigLatched bit 2 negativo.
Tornare nell'intervallo
ammesso.
E A320
par.
Carico esterno o accelerazione Ridurre il carico esterno o
eccessivi.
l'accelerazione.
Parametro _SigLatched bit 8
Se necessario, utilizzare un
azionamento di diverse dimensioni.
La reazione ad errore può
essere impostata con il parametro ErrorResp_p_dif.
E A324
1
Errore durante la creazione del Il movimento verso riferimento Possibili sottocodici dell'errore:
riferimento (info suppl. =
è stato terminato in seguito alla E A325, E A326, E A327, E
codice d'errore dettagliato)
comparsa di un errore. InforA328 or E A329.
mazioni dettagliate sulla causa
Parametro _SigLatched bit 4 dell'errore sono reperibili tra le
informazioni supplementari
nella memoria errori.
E A325
1
Interruttore di finecorsa da rag- Creazione del riferimento
Attivare l'interruttore di finegiungere non attivato
sull'interruttore di finecorsa
corsa mediante 'IOsigLimP' o
positivo o negativo disattivata. 'IOsigLimN'.
Parametro _SigLatched bit 4
Servoamplificatore AC
Scegliere valori di ampiezza e
offset minori.
Errore d'inseguimento
305
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E A326
1
Causa
LXM32C
Soluzione
L'interruttore di riferimento non Interruttore di riferimento difet- Verificare il funzionamento e il
è stato trovato tra l'interruttore toso o non correttamente colle- cablaggio dell'interruttore di
riferimento.
di finecorsa positivo e quello
gato.
negativo.
Parametro _SigLatched bit 4
1
Più di un segnale dell'interruttore di finecorsa positivo/negativo o dell'interruttore di
riferimento attivo
Parametro _SigLatched bit 4
L'interruttore di riferimento o
Controllare il cablaggio dell'alil'interruttore di finecorsa non
mentazione 24VDC.
sono collegati o la tensione di
alimentazione degli interruttori
è troppo ridotta.
E A32A
1
Durante un movimento in direzione negativa è intervenuto
l'interruttore di finecorsa positivo.
Avviare il movimento verso riferimento con direzione di movimento negativo (ad esempio
movimento verso riferimento
su interruttore di finecorsa
Parametro _SigLatched bit 4 negativo) e attivare l'interruttore di finecorsa positivo (interruttore nel direzione di
movimento contrario).
Verificare la funzione e la connessione dell'interruttore di
finecorsa.
Attivare un movimento con
direzione negativa (l'interruttore di finecorsa target deve
essere collegato all'interruttore di finecorsa negativo).
E A32B
1
Durante un movimento in direzione positiva è intervenuto
l'interruttore di finecorsa negativo.
Avviare il movimento verso riferimento con direzione di movimento positivo (ad esempio
movimento verso riferimento
su interruttore di finecorsa
Parametro _SigLatched bit 4 negativo) e attivare l'interruttore di finecorsa negativo
(interruttore nel direzione di
movimento contrario).
Verificare la funzione e la connessione dell'interruttore di
finecorsa.
Attivare un movimento con
direzione positiva (l'interruttore di finecorsa target deve
essere collegato all'interruttore di finecorsa positivo).
E A32C
1
Errore interruttore di riferimento (breve attivazione del
segnale interruttore o superamento dell'interruttore)
Disturbo del segnale interruttore di finecorsa
Il motore è sottoposto a carico
di vibrazioni o d'urto se viene
arrestato dopo l'attivazione del
Parametro _SigLatched bit 4 segnale interruttore.
Verificare l'alimentazione di
tensione, la funzione e il
cablaggio dell'interruttore.
Verificare la reazione del
motore dopo l'arresto e ottimizzare le impostazioni del controller.
E A32D
1
Errore interruttore di finecorsa
positivo (breve attivazione del
segnale interruttore o superamento dell'interruttore)
Disturbo del segnale interruttore di finecorsa
Il motore è sottoposto a carico
di vibrazioni o d'urto se viene
arrestato dopo l'attivazione del
Parametro _SigLatched bit 4 segnale interruttore.
Verificare l'alimentazione di
tensione, la funzione e il
cablaggio dell'interruttore.
Verificare la reazione del
motore dopo l'arresto e ottimizzare le impostazioni del controller.
E A32E
1
Errore interruttore di finecorsa
negativo (breve attivazione del
segnale interruttore o superamento dell'interruttore)
Disturbo del segnale interruttore di finecorsa
Il motore è sottoposto a carico
di vibrazioni o d'urto se viene
arrestato dopo l'attivazione del
Parametro _SigLatched bit 4 segnale interruttore.
Verificare l'alimentazione di
tensione, la funzione e il
cablaggio dell'interruttore.
Verificare la reazione del
motore dopo l'arresto e ottimizzare le impostazioni del controller.
E A330
0
Movimento verso riferimento
fino a impulso di posizione non
riproducibile. Impulso di posizione troppo vicino al commutatore.
Modificare la sede di montaggio dell'interruttore di finecorsa (è consigliabile una
distanza di mezza rotazione
del motore dalla posizione
meccanica corrente in direzione esterna alla corsa utile)
Parametro _WarnLatched bit
4
306
La differenza di posizione tra la
modifica del segnale interruttore e l'attivazione dell'impulso
di posizione è troppo ridotta.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
E A329
LXM32C
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E A332
1
Causa
Errore durante il movimento
Un movimento nel modo openel modo operativo Jog (infor- rativo Jog è stato arrestato a
mazione supplementare =
causa di un'errore.
codice errore dettagliato)
Soluzione
Il codice di errore dettagliato
genera informazioni supplementari nella memoria errori.
Parametro _SigLatched bit 4
E A334
2
Superamento del tempo
durante il monitoraggio della
finestra di inattività
E A337
0
Riavviare il modo operativo.
Impossibile proseguire il modo La prosecuzione di un movimento interrotto nel modo opeoperativo
rativo Profile Position non è
Parametro _WarnLatched bit possibile se è attivo contempo4
raneamente un altro modo
operativo.
Nel modo operativo Motion
Sequence la prosecuzione non
è possibile se il movimento a
catena è stato interrotto
E A33A
0
Punto di riferimento non definito (ref_ok=0)
Nessun punto di riferimento
definito nel modo operativo
Homing.
Parametro _WarnLatched bit Il punto di riferimento non è più
4
valido in quanto ha oltrepassato il campo di movimento.
Motore privo di encoder assoluto.
Definire un punto di riferimento
nel modo operativo Homing.
Utilizzare un motore dotato di
encoder assoluto.
E A33D
0
Il movimento a catena è già
attivo
Attendere il termine del movimento a catena prima di impostare la posizione successiva.
E A33E
0
Nessun movimento attivato
Modifica del movimento a
catena mentre questo è già
attivo (posizione finale del
Parametro _WarnLatched bit movimento a catena non
4
ancora raggiunta).
Parametro _WarnLatched bit
4
E A33F
0
L'errore di posizionamento al
termine del movimento è maggiore della finestra di inattività.
Ciò può essere causato ad
esempio da un carico esterno.
Attivare un movimento a
catena senza movimento.
Controllare il carico.
Verificare le impostazioni relative alla finestra di inattività
(parametri MON_p_win,
MON_p_winTime e
MON_p_winTout).
Ottimizzare le impostazioni di
regolazione.
Avviare un movimento prima
che il movimento a catena sia
stato attivato.
Posizione del movimento a
La posizione del movimento a Verificare la posizione del
catena oltre il campo del movi- catena non rientra nel campo movimento a catena e del
mento attivo
di spostamento corrente.
campo di movimento attuale.
Parametro _WarnLatched bit
4
E A341
0
Posizione del movimento a
catena già superata
0198441113763, V1.02, 12.2009
Parametro _WarnLatched bit
4
E A342
1
La velocità target non è stata
raggiunta nella posizione del
movimento a catena
Parametro _SigLatched bit 4
Servoamplificatore AC
La posizione del movimento a
catena è già stata superata
con il movimento attuale.
La posizione del movimento a
catena è stata superata, la
velocità target non è stata raggiunta.
Ridurre la velocità della rampa
in modo tale da raggiungere la
velocità target nella posizione
del movimento a catena.
307
10 Diagnosi e rimozione delle anomalie
Codice
errore
Classe
Breve descrizione
di errore
E A347
0
Valore soglia per avvertenza
errore di posizionamento raggiunto
E A348
1
Nessuna fonte selezionata per Nessun valore di consegna
valori di consegna analogici
analogico selezionato
Causa
LXM32C
Soluzione
Carico esterno o accelerazione Ridurre il carico esterno o
eccessivi.
l'accelerazione.
Il valore soglia può essere
impostato mediante il parameParametro _WarnLatched bit
tro MON_p_dif.
8
Selezionare la fonte per i valori
di consegna analogici
Parametro _SigLatched bit 4
E A34D
-
Questa funzione non è disponi- Questa funzione non può
bile quando è attivo Modulo.
essere eseguita quando è
attivo Modulo.
Disattivare Modulo per poter
utilizzare la funzione.
E A34E
-
Il valore target per il movimento assoluto non è possibile
con il riquadro Modulo definito
né con la lavorazione Modulo.
Impostare il valore target corCon impostazione di
retto per il movimento assoluto.
'MOD_Absolute':
Distanza più breve: il valore
target non rientra nel riquadro
Modulo definito.
Direzione positiva: il valore target è più piccolo di 'MOD_Min'.
Direzione negativa: il valore
target è più grande di
'MOD_Max'.
E A34F
-
Non sono ammessi movimenti
assoluti al di fuori del riquadro
Modulo. Al loro posto sono
stati eseguiti i movimenti corrispondenti all'interno del riquadro Modulo.
Con l'impostazione corrente di
'MOD_AbsMultiRng', sono
possibili solo movimenti
all'interno del riquadro Modulo.
Modificare il parametro
'MOD_AbsMultiRng' per autorizzare movimenti al di fuori del
riquadro Modulo.
E B100
0
RS485/Modbus: servizio sconosciuto
È stato richiesto un servizio
Modbus non supportato.
Verificare l'applicazione sul
Master Modbus.
Parametro _WarnLatched bit
5
0
RS485/Modbus: errore di pro- Errore logico di protocollo: lun- Verificare l'applicazione sul
tocollo
ghezza non corretta o sottofun- Master Modbus.
zione non supportata.
Parametro _WarnLatched bit
5
E B201
2
RS485/Modbus: errore Nodeguard
Il monitoraggio connessione
(parametro MBnode_guard) è
<>0ms ed è stato rilevato un
Parametro _SigLatched bit 5 evento Nodeguard.
Verificare l'applicazione sul
Master Modbus o modificare il
valore (impostare il valore 0 ms
o aumentare il tempo di monitoraggio del parametro
MBnode_guard).
E B202
0
RS485/Modbus: avvertenza
Nodeguard
Il monitoraggio connessione
(parametro MBnode_guard) è
<>0ms ed è stato rilevato un
Parametro _WarnLatched bit evento Nodeguard.
5
Verificare l'applicazione sul
Master Modbus o modificare il
valore (impostare il valore 0 ms
o aumentare il tempo di monitoraggio del parametro
MBnode_guard).
0198441113763, V1.02, 12.2009
E B200
308
Servoamplificatore AC
LXM32C
11
11 Parametri
Parametri
11
Questo capitolo riporta una panoramica generale dei parametri che possono essere attivati per il comando del prodotto.
Inoltre i parametri speciali per la comunicazione attraverso il bus di
campo sono descritti nel rispettivo manuale del bus.
@ AVVERTENZA
COMPORTAMENTO IMPREVISTO CAUSATO DA PARAMETRI
Il comportamento del sistema di azionamento è determinato da numerosi parametri. Valori dei parametri non appropriati possono attivare movimenti o segnali imprevisti e disattivare funzioni di
monitoraggio.
•
Modificare solo i parametri di cui si conosce il significato.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi di errore.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
11.1
Descrizione dei parametri
La descrizione di un parametro contiene informazioni sull'identificazione
univoca, sulle possibilità di impostazione, sulle impostazioni di default e
sulle proprietà di un parametro.
Struttura della rappresentazione dei parametri:
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Esempio_Nome
Breve descrizione (riferimento incrociato)
ConF → inF-
Valori di selezione
1 / Valore di selezione 1 / ABC1: spiegazione 1
2 / Valore di selezione 2 / ABC2: spiegazione 2
Apk
0.00
3.00
300.00
UINT32
R/W
per.
-
Bus di campo
1234:5h
0198441113763, V1.02, 12.2009
Prn
Descrizione dettagliata
Nome parametro
Menu HMI
Servoamplificatore AC
Il nome parametro consente di identificare univocamente un parametro.
Il menu HMI visualizza le voci per richiamare i parametri sull'HMI.
311
11 Parametri
LXM32C
Descrizione
Breve descrizione (riferimento incrociato):
questa descrizione contiene brevi informazioni sul parametro e un riferimento incrociato alla pagina sulla quale ne viene illustrata la funzione.
Valori di selezione:
Per i parametri per i quali è possibile scegliere tra diverse impostazioni
vengono indicati il valore tramite bus di campo e la relativa denominazione per il loro inserimento tramite il software di messa in servizio e
l'HMI.
1 = valore tramite bus di campo
Valore di selezione1 = valore di selezione tramite software di messa in
servizio
ABC1 = valore di selezione tramite HMI
Descrizione dettagliata:
contiene ulteriori informazioni sul parametro.
Unità
Valore minimo
Impostazione di fabbrica
valore massimo
Tipo dati
R/W
L'unità del valore.
Il valore più ridotto che può essere inserito.
Impostazioni alla consegna del prodotto.
Il valore più elevato che può essere inserito.
Se il valore minimo e il valore massimo non sono specificati esplicitamente, la fascia di valori valida risulta dal tipo dati.
Tipo dati
Byte
Valore minimo
valore massimo
INT8
1 byte / 8 bit
-128
127
UINT8
1 byte / 8 bit
0
255
INT16
2 byte / 16 bit
-32768
32767
UINT16
2 byte / 16 bit
0
65535
INT32
4 byte / 32 bit
-2147483648
2147483647
UINT32
4 byte / 32 bit
0
4294967295
Sigla che indica la possibilità di leggere e scrivere i valori.
R/-: i valori possono essere solo letti.
R/W: i valori possono essere letti e scritti.
Persistente
La sigla "per." indica che il valore del parametro rimane salvato nella memoria dopo aver disinserito l'apparecchio.
In caso di inserimento tramite l'interfaccia HMI, l'apparecchio memorizza automaticamente il valore del parametro ogni volta che viene modificato.
0198441113763, V1.02, 12.2009
In caso di modifica di un valore da parte del software di messa in servizio o del bus di campo, l'utente deve esplicitamente salvare la modifica
nella memoria persistente.
312
Servoamplificatore AC
LXM32C
11 Parametri
11.1.1 Cifre decimali con bus di campo
Inserimento dei valori
Tenere presente che nel bus di campo i valori dei parametri devono essere inseriti senza segno decimale. È tuttavia necessario inserire tutte
le posizioni decimali.
Esempio:
Software di messa in servizio
Bus di campo
20
20
20
5,0
5,0
50
23,57
23,57
2357
1,00
1,00
1000
0198441113763, V1.02, 12.2009
Valore
Servoamplificatore AC
313
11 Parametri
11.2
LXM32C
Lista dei parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_AccessInfo
Canale di accesso momentaneo
-
UINT16
R/-
Modbus 280
Analogico 1: valore della tensione
d'ingresso (139)
mV
-10000
10000
INT16
R/-
Modbus 2306
Analogico 2: valore della tensione
d'ingresso (139)
mV
-10000
10000
INT16
R/-
Modbus 2314
Momento d'inerzia dell'intero sistema (157)
kg cm2
0.1
0.1
6553.5
UINT16
R/per.
-
Modbus 12056
Arms
-
UINT16
R/-
Modbus 12046
Arms
-
INT16
R/-
Modbus 12048
%
0
0
100
UINT16
R/-
Modbus 12054
UINT16
R/-
Modbus 12036
Low byte:
Valore 0: assegnato dal canale nell'High
Byte
Valore 1: assegnato in esclusiva dal canale
nell'High Byte
High Byte: assegnazione momentanea del
canale di accesso
Valore 0: riservato
Valore 1: I/O
Valore 2: HMI
Valore 3: Modbus RS485
Valore 4: canale principale bus di campo
Valori 5 ... 12: Modbus TCP, CANopen della
seconda SDO o Profibus Master classe 2
Valori 13 ... 28: canali espliciti Ethenet/IP
_AI1_act
Mon
AnA1
_AI2_act
Mon
AnA2
_AT_J
Il valore viene calcolato automaticamente
durante l'Autotuning.
_AT_M_friction
Coppia di frizione del sistema (157)
Il valore viene rilevato durante l'Autotuning.
In passi di 0,01 Arms.
_AT_M_load
Coppia costante del carico (157)
Il valore viene rilevato durante l'Autotuning.
In passi di 0,01 Arms.
_AT_progress
Avanzamento Autotuning (157)
_AT_state
Stato Autotuning (157)
314
Destinazione dei bit:
Bit 0 ... 10: ultimo passaggio di elaborazione Bit 13: auto_tune_process
Bit 14: auto_tune_end
Bit 15: auto_tune_err
0198441113763, V1.02, 12.2009
In passi di 0,1 kg cm2.
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
_Cond_State4
Condizioni per il passaggio allo stato di fun- zionamento Ready To Switch On
Stato segnale:
0: condizione non soddisfatta
1: condizione soddisfatta
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/-
Modbus 7244
UINT16
R/-
Modbus 4398
UINT16
R/per.
-
Modbus 4354
UINT16
R/per.
-
Modbus 4358
UINT16
R/per.
-
Modbus 4356
UINT16
R/per.
-
Modbus 4360
Bit 0: bus DC o tensione di rete
Bit 1: ingressi per funzione di sicurezza
Bit 2: nessun download della configurazione
attivo
Bit 3: velocità superiore al valore limite
Bit 4: posizione assoluta impostata
Bit 5: freno d'arresto non rilasciato manualmente
_CTRL_ActParSet Record parametri regolatore attivo (135)
Valore 1: è attivo il record parametri regolatore 1
Valore 2: è attivo il record parametri regolatore 2
-
Un record parametri regolatore diventa attivo
allo scadere del tempo impostato per la
commutazione dei parametri
(CTRL_ParChgTime).
_CTRL_KPid
V/A
0.5
Il valore viene calcolato sulla base dei para- 1270.0
metri del motore.
Regolatore di corrente: componente d del
fattore P
In passi di 0,1 V/A.
_CTRL_KPiq
V/A
0.5
Il valore viene calcolato sulla base dei para- 1270.0
metri del motore.
Regolatore di corrente: componente q del
fattore P
In passi di 0,1 V/A.
_CTRL_TNid
Regolatore di corrente: componente d del
tempo di regolazione
ms
0.13
Il valore viene calcolato sulla base dei para- 327.67
metri del motore.
In passi di 0,01 ms.
0198441113763, V1.02, 12.2009
_CTRL_TNiq
Regolatore di corrente: componente q del
tempo di regolazione
ms
0.13
Il valore viene calcolato sulla base dei para- 327.67
metri del motore.
In passi di 0,01 ms.
Servoamplificatore AC
315
11 Parametri
LXM32C
Indirizzo parametro con bus di
campo
Per la codificazione binaria vedere il capitolo Funzionamento, automa a stati finiti
Bit 0 ... 3: bit di stato
Bit 4: Voltage enabled
Bit 5 ... 6: bit di stato
Bit 7: avvertimento
Bit 8: HALT request active
Bit 9: Remote
Bit 10: target reached
Bit 11: riservato
Bit 12: specifico del modo operativo
Bit 13: x_err
Bit 14: x_end
Bit 15: ref_ok
UINT16
R/-
Modbus 6916
Temperatura momentanea dell'apparecchio
°C
-
INT16
R/-
Modbus 7204
_I_act
Corrente motore totale
In passi di 0,01 Arms.
INT16
R/-
Modbus 7686
Mon
Arms
-
_Id_act_rms
Corrente effettiva del motore (componente d, Arms
indebolimento di campo)
In passi di 0,01 Arms.
-
INT16
R/-
Modbus 7684
_Id_ref_rms
Corrente nominale del motore (componente Arms
d, indebolimento di campo)
In passi di 0,01 Arms.
-
INT16
R/-
Modbus 7714
_Imax_act
Valore limite corrente effettiva
UINT16
R/-
Modbus 7248
Descrizione
_DCOMstatus
Parola di stato DriveCom
_DEV_T_current
Mon
tdEV
iAct
Valore della massima corrente effettiva. In
particolare, si tratta del più piccolo dei
seguenti valori:
- CTRL_I_max (solo con funzionamento
regolare)
- LIM_I_maxQSTP (solo con Quick Stop)
- LIM_I_maxHalt (solo con Halt)
- Limitazione di corrente da parte
dell'ingresso analogico
- Limitazione di corrente da parte
dell'ingresso digitale
- M_I_max (solo se il motore è collegato)
- PA_I_max
Vengono inoltre considerate ulteriori riduzioni della corrente da parte del monitoraggio l2t in _Imax_actual.
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
-
0198441113763, V1.02, 12.2009
Tipo dati
R/W
Persistente
Esperti
Nome parametro
Menu HMI
Nome HMI
In passi di 0,01 Arms.
316
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_Imax_system
Limitazione di corrente del sistema
Arms
-
UINT16
R/-
Modbus 7246
0
In caso di errore di configurazione, qui viene visualizzato l'indirizzo Modbus del parametro
con un valore non valido.
UINT16
R/-
Modbus 7180
-
UINT16
R/-
Modbus 2050
-
UINT16
R/-
Modbus 2078
-
UINT16
R/-
Modbus 2080
-
UINT16
R/-
Modbus 2124
Questo parametro indica la massima corrente di sistema. In particolare, si tratta del
valore più piccolo tra la massima corrente
del motore e la massima corrente dello stadio finale (in funzione della frequenza PWM
e della tensione di rete). Se non è collegato
alcun motore, per questo parametro viene
considerata solo la massima corrente dello
stadio finale.
In passi di 0,01 Arms.
_InvalidParam
Indirizzo Modbus del parametro con un
valore non valido
_IO_act
Stato fisico degli ingressi/uscite digitali
Low byte:
Bit 0: DI0
Bit 1: DI1
Bit 2: DI2
Bit 3: DI3
Bit 4: DI4
Bit 5: DI5
High byte:
Bit 8: DQ0
Bit 9: DQ1
Bit 10: DQ2
Bit 11: DQ3
Bit 12: DQ4
_IO_DI_act
Stato degli ingressi digitali (142)
Mon
Destinazione dei bit:
Bit 0: DI0
Bit 1: DI1
Bit 2: DI2
Bit 3: DI3
Bit 4: DI4
Bit 5: DI5
diMo
_IO_DQ_act
Stato delle uscite digitali (142)
Mon
Destinazione dei bit:
Bit 0: DQ0
Bit 1: DQ1
Bit 2: DQ2
Bit 3: DQ3
Bit 4: DQ4
0198441113763, V1.02, 12.2009
doMo
_IO_STO_act
Mon
Sto
Stato degli ingressi per la funzione di sicurezza STO (142)
Codifica dei singoli segnali:
Bit 0: STO_A
Bit 1: STO_B
Servoamplificatore AC
317
11 Parametri
LXM32C
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Corrente effettiva del motore (componente q, Arms
generatrice di coppia)
In passi di 0,01 Arms.
-
INT16
R/-
Modbus 7682
Corrente nominale del motore (componente Arms
q, generatrice di coppia)
In passi di 0,01 Arms.
-
INT16
R/-
Modbus 7712
Errore che provoca uno stop (classe di
errore da 1 a 4)
0
-
UINT16
R/-
Modbus 7178
Numero dell'ultimo avvertimento (classe di
errore 0)
Numero dell'ultimo avvertimento verificatosi. Alla disattivazione dell'avvertimento il
numero viene mantenuto sino al successivo
Fault-Reset.
Valore 0: nessun avvertimento
UINT16
R/-
Modbus 7186
Tempo di interruzione (chiusura freno d'arre- ms
sto)
-
UINT16
R/-
Modbus 3394
ms
-
UINT16
R/-
Modbus 3396
-
UINT16
R/-
Modbus 3334
Nome parametro
Menu HMI
Nome HMI
Descrizione
_Iq_act_rms
Mon
qAct
_Iq_ref_rms
Mon
qrEF
_LastError
Mon
LFLt
Numero dell'errore corrente. Ulteriori errori
non sovrascrivono questo numero di errore.
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Esempio: se la reazione all'errore di un interruttore di finecorsa provocasse un errore di
sovratensione, questo parametro contiene il
numero dell'errore dell'interruttore di finecorsa.
_LastWarning
Mon
LWrn
_M_BRK_T_apply
_M_BRK_T_releas Tempo di scatto (rilasciare freno d'arresto)
e
_M_Encoder
Tipo encoder motore
ConF → inF-
1 / SinCos With HiFa / SWhi: SinCos con
Hiperface
2 / SinCos Without HiFa / SWoh: SinCos
senza Hiperface
3 / SinCos With Hall / SWhA: SinCos con
Hall
4 / SinCos With EnDat / SWEn: SinCos con
EnDat
5 / EnDat Without SinCos / EndA: Endat
senza SinCos
6 / Resolver / rESo: resolver
7 / Hall / hALL: Hall (non ancora supportato)
8 / BISS / biSS: BISS
SEnS
0198441113763, V1.02, 12.2009
Eccezione: gli errori della classe di errore 4
sovrascrivono le voci presenti.
High byte:
Valore 0: encoder rotativo
Valore 1: encoder lineare
318
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
11 Parametri
Descrizione
_M_HoldingBrake Identificazione freno
Valore 0: motore senza freno d'arresto
Valore 1: motore con freno d'arresto
_M_I_0
Corrente continuativa di stallo motore
In passi di 0,01 Arms.
_M_I_max
Corrente massima del motore
ConF → inF-
In passi di 0,01 Arms.
MiMA
_M_I_nom
Corrente nominale del motore
ConF → inF-
In passi di 0,01 Arms.
Mino
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
-
UINT16
R/-
Modbus 3392
Arms
-
UINT16
R/-
Modbus 3366
Arms
-
UINT16
R/-
Modbus 3340
Arms
-
UINT16
R/-
Modbus 3342
_M_I2t
Massimo tempo ammesso per la corrente
massima del motore
ms
-
UINT16
R/-
Modbus 3362
_M_Jrot
Momento d'inerzia del motore
motor_f
-
UINT32
R/-
Modbus 3352
motor_u
-
UINT32
R/-
Modbus 3350
mH
-
UINT16
R/-
Modbus 3358
mH
-
UINT16
R/-
Modbus 3356
%
-
INT16
R/-
Modbus 7220
UINT16
R/-
Modbus 3372
Unità di misura:
Motori rotativi: kgcm2
Motori lineari: kg
In passi di 0,001 motor_f.
_M_kE
Costante di tensione motore kE
Costante di tensione Vrms a 1000 min-1
Unità di misura:
Motori rotativi: Vrms/min-1
Motori lineari: Vrms/(m/s)
In passi di 0,1 motor_u.
_M_L_d
Componente d dell'induttanza motore
In passi di 0,01 mH.
_M_L_q
Componente q dell'induttanza motore
In passi di 0,01 mH.
_M_load
Carico attuale del motore (254)
Mon
0198441113763, V1.02, 12.2009
LdFM
_M_M_0
Coppia continuativa di stallo del motore
motor_m
Questo parametro corrisponde a un valore del 100% nel modo operativo Profile Torque. Unità di misura:
Motori rotativi: Ncm
Motori lineari: N
Servoamplificatore AC
319
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_M_M_max
Coppia massima del motore
Nm
-
UINT16
R/-
Modbus 3346
In passi di 0,1 Nm.
_M_M_nom
Coppia nominale/Forza nominale del motore motor_m
Unità di misura:
Motori rotativi: Ncm
Motori lineari: N
UINT16
R/-
Modbus 3344
_M_maxoverload
Valore di picco del sovraccarico del
motore (255)
%
-
INT16
R/-
Modbus 7222
motor_v
-
UINT16
R/-
Modbus 3336
motor_v
-
UINT16
R/-
Modbus 3338
Sovraccarico massimo del motore verificatosi negli ultimi 10 secondi.
_M_n_max
ConF → inFMnMA
_M_n_nom
Massima velocità ammessa/Velocità del
motore
Unità di misura:
Motori rotativi: min-1
Motori lineari: mm/s
Velocità nominale/Velocità nominale del
motore
Unità di misura:
Motori rotativi: min-1
Motori lineari: mm/s
_M_overload
Sovraccarico attuale del motore (I2t) (255)
%
-
INT16
R/-
Modbus 7218
_M_Polepair
Numero di coppie di poli del motore
-
UINT16
R/-
Modbus 3368
mm
-
UINT16
R/-
Modbus 3398
Ω
-
UINT16
R/-
Modbus 3354
_M_PolePairPitc Ampiezza coppia di poli del motore
h
In passi di 0,01 mm.
_M_R_UV
Resistenza dell'avvolgimento del motore
In passi di 0,01 Ω.
_M_T_current
Temperatura corrente del motore (253)
°C
Per i sensori di temperatura che si attivano non è possibile alcuna segnalazione sensata (per il tipo di sensore di temperatura vedere
il parametro M_TempType)
INT16
R/-
Modbus 7202
_M_T_max
Temperatura massima del motore (253)
°C
-
INT16
R/-
Modbus 3360
_M_Type
Tipo di motore
Valore 0: nessun motore selezionato
Valore >0: tipo di motore collegato
UINT32
R/-
Modbus 3332
ConF → inF-
-
MtyP
320
Servoamplificatore AC
0198441113763, V1.02, 12.2009
11 Parametri
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_M_U_nom
Tensione nominale del motore
V
-
UINT16
R/-
Modbus 3348
In passi di 0,1 V.
_n_act_ENC1
Numero di giri effettivo encoder 1
min-1
-
INT16
R/-
Modbus 7760
_n_act
Numero di giri effettivo
min-1
-
INT16
R/-
Modbus 7696
Valore di consegna della velocità
min-1
-
INT16
R/-
Modbus 7694
Numeratore ore di esercizio
s
-
UINT32
R/-
Modbus 7188
Posizione assoluta riferita alla corsa utile
dell'encoder (148)
usr_p
-
UINT32
R/-
Modbus 7710
Inc
-
UINT32
R/-
Modbus 7708
Inc
-
INT32
R/-
Modbus 7756
usr_p
-
INT32
R/-
Modbus 7758
INT32
R/-
Modbus 7700
Mon
nAct
_n_ref
Mon
nrEF
_OpHours
Mon
oPh
_p_absENC
Questo valore si basa sulla posizione
approssimativa dell'encoder riferita alla sua
corsa utile.
_p_absmodulo
Posizione assoluta riferita alla risoluzione
interna nelle unità interne
Questo valore si basa sulla posizione
approssimativa dell'encoder riferita alla risoluzione interna (131072 inc).
0198441113763, V1.02, 12.2009
_p_act_ENC1_int Posizione effettiva encoder 1 nelle unità
interne
_p_act_ENC1
Posizione effettiva encoder 1
_p_act_int
Posizione effettiva nelle unità interne
Inc
NOTA: la posizione effettiva è valida soltanto dopo il rilevamento della posizione assoluta dell'encoder all'interfacca specificata.
Se la posizione assoluta dell'encoder non è
valida:
_WarnLatched
_WarnActive
Bit 13: posizione assoluta del motore non
ancora rilevata
Servoamplificatore AC
321
11 Parametri
LXM32C
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
Actual Position
usr_p
NOTA: la posizione effettiva è valida soltanto dopo il rilevamento della posizione assoluta dell'encoder all'interfacca specificata.
Se la posizione assoluta dell'encoder non è
valida:
_WarnLatched
_WarnActive
Bit 13: posizione assoluta del motore non
ancora rilevata
INT32
R/-
Modbus 7706
Inc
Se il riduttore elettronico è inattivo qui è pos- sibile individuare il riferimento di posizione
per il regolatore di posizione. Tale posizione
viene impostata quando il riduttore elettronico viene attivato selezionando "Sincronizzazione con movimento di compensazione".
INT32
R/-
Modbus 7942
Giro
0.0000
429496.7295
UINT32
R/W
-
Modbus 7734
Giro
-214748.3648
214748.3647
INT32
R/-
Modbus 7736
Giro
-214748.3648
L'errore di posizionamento è la differenza tra 214748.3647
valore di consegna di posizione e posizione
effettiva. L'attuale errore di posizionamento è
formato dall'errore di posizionamento dovuto
al carico e dall'errore di posizionamento
dinamico.
INT32
R/-
Modbus 7716
INT32
R/-
Modbus 2058
INT32
R/-
Modbus 7698
Nome parametro
Menu HMI
Nome HMI
Descrizione
_p_act
_p_addGEAR
Posizione di partenza riduttore elettronico
_p_dif_load_pea Valore massimo dell'errore di posizionak
mento dovuto al carico (256)
Questo parametro contiene l'errore di posizionamento massimo dovuto al carico
riscontrato fino al momento corrente. Con un
accesso in scrittura il valore viene di nuovo
resettato.
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
_p_dif_load
Attuale errore di posizionamento dovuto al
carico tra valore di consegna di posizione e
posizione effettiva. (256)
L'errore di posizionamento dovuto al carico è
la differenza tra valore di consegna di posizione e posizione effettiva provocata dal
carico. Questo valore è utilizzato per il monitoraggio degli errori d'inseguimento.
_p_dif
Attuale errore di posizionamento incluso
errore di posizionamento dinamico
In passi di 0,0001 giri
_p_PTI_act
Posizione effettiva sull'interfaccia PTI
Incrementi di posizione contati sull'interfaccia di posizione PTI
_p_ref_int
322
Valore di consegna di posizione in unità
interne
Inc
-2147483648
2147483647
Inc
Il valore corrisponde al valore di consegna di posizione del regolatore di posizione
Servoamplificatore AC
0198441113763, V1.02, 12.2009
In passi di 0,0001 giri
LXM32C
11 Parametri
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
usr_p
Il valore corrisponde al valore di consegna di posizione del regolatore di posizione
-
INT32
R/-
Modbus 7704
_Power_mean
Potenza in uscita media
W
-
INT16
R/-
Modbus 7196
_pref_acc
Accelerazione del valore di consegna per il
generatore di profili
usr_a
-
INT32
R/-
Modbus 7954
_pref_v
Velocità del valore di consegna per il genera- usr_v
tore di profili
-
INT32
R/-
Modbus 7950
_prgNoDEV
Numero di programma del firmware
Esempio: PR0912.00
Il valore viene visualizzato come valore deci- male: 91200
UINT32
R/-
Modbus 258
-
UINT16
R/-
Modbus 264
Il formato della versione è XX.YY.ZZ.
La parte XX.YY è contenuta in questo para- metro.
La parte ZZ è contenuta nel parametro
_prgRevDEV.
UINT16
R/-
Modbus 260
Arms
-
UINT16
R/per.
-
Modbus 4100
Arms
-
UINT16
R/per.
-
Modbus 4098
Nome parametro
Menu HMI
Nome HMI
Descrizione
_p_ref
Valore di consegna di posizione
Il segno deve corrispondere alla variazione
del valore di velocità:
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Aumento di velocità: segno positivo
Abbassamento di velocità: segno negativo
ConF → inFPrn
_prgRevDEV
Numero revisione firmware
ConF → inF-
Il formato della versione è XX.YY.ZZ.
La parte XX.YY è contenuta nel parametro
_prgVerDEV.
La parte ZZ viene utilizzata per analisi di
qualità ed è contenuta in questo parametro.
Prr
Esempio: V01.23.45
Il valore viene visualizzato come valore decimale: 45
_prgVerDEV
ConF → inFPrV
Numero di versione del firmware
0198441113763, V1.02, 12.2009
Esempio: V01.23.45
Il valore viene visualizzato come valore decimale: 123
_PS_I_max
Corrente massima dello stadio finale
ConF → inF-
In passi di 0,01 Arms.
PiMA
_PS_I_nom
Corrente nominale dello stadio finale
ConF → inF-
In passi di 0,01 Arms.
Pino
Servoamplificatore AC
323
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_PS_load
Carico attuale dello stadio finale (254)
%
-
INT16
R/-
Modbus 7214
_PS_maxoverload Valore di picco del sovraccarico attuale dello %
stadio finale (255)
Sovraccarico massimo dello stadio finale
verificatosi negli ultimi 10 secondi.
INT16
R/-
Modbus 7216
_PS_overload_I2 Sovraccarico attuale dello stadio finale (I2t)
t
%
-
INT16
R/-
Modbus 7212
Temperatura corrente dello stadio
finale (253)
°C
-
INT16
R/-
Modbus 7200
_PS_T_max
Temperatura massima dello stadio
finale (253)
°C
-
INT16
R/per.
-
Modbus 4110
_PS_T_warn
Soglia di avvertimento temperatura dello sta- °C
dio finale (253)
-
INT16
R/per.
-
Modbus 4108
_PS_U_maxDC
Massima tensione ammessa del bus DC
V
-
UINT16
R/per.
-
Modbus 4102
V
-
UINT16
R/per.
-
Modbus 4104
_PS_U_minStopDC Soglia di sottotensione bus DC per un Quick V
Stop
Raggiunta questa soglia l'azionamento ese- gue un Quick Stop
UINT16
R/per.
-
Modbus 4116
usr_p
-
INT32
R/-
Modbus 7940
Mon
LdFP
_PS_T_current
Mon
tPS
In passi di 0,1 V.
_PS_U_minDC
Minima tensione ammessa del bus DC
In passi di 0,1 V.
_RAMP_p_act
Posizione effettiva del generatore di profili
_RAMP_p_target
Posizione target del generatore di profili
usr_p
Valore della posizione assoluta del genera- tore di profili, calcolato dai valori di posizione relativa e assoluta trasmessi.
INT32
R/-
Modbus 7938
_RAMP_v_act
Velocità effettiva del generatore di profili
INT32
R/-
Modbus 7948
324
usr_v
-
Servoamplificatore AC
0198441113763, V1.02, 12.2009
In passi di 0,1 V.
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_RAMP_v_target
Velocità target del generatore di profili
usr_v
-
INT32
R/-
Modbus 7946
_RES_load
Carico attuale della resistenza di
frenatura (254)
%
-
INT16
R/-
Modbus 7208
%
-
INT16
R/-
Modbus 7210
%
-
INT16
R/-
Modbus 7206
Mon
LdFb
Monitoraggio della resistenza di frenatura
interna ed esterna in base alle impostazioni
nel parametro RESint_ext.
_RES_maxoverloa Valore di picco del sovraccarico della resid
stenza di frenatura (255)
Sovraccarico massimo della resistenza di
frenatura verificato negli ultimi 10 secondi.
_RES_overload
Sovraccarico attuale della resistenza di frenatura (I2t) (255)
Monitoraggio della resistenza di frenatura
interna ed esterna in base alle impostazioni
nel parametro RESint_ext.
_RESint_P
Potenza nominale resistenza di frenatura
interna
W
-
UINT16
R/per.
-
Modbus 4114
_RESint_R
Valore di resistenza della resistenza interna Ω
di frenatura
In passi di 0,01 Ω.
-
UINT16
R/per.
-
Modbus 4112
_ScalePOSmax
Valore massimo della scalatura posizione
usr_p
Questo valore dipende da ScalePOSdenom e da ScalePOSnum.
-
INT32
R/-
Modbus 7956
_ScaleRAMPmax
Valore massimo della scalatura rampa
usr_a
-
INT32
R/-
Modbus 7960
usr_v
-
INT32
R/-
Modbus 7958
Questo valore dipende da ScaleRAMPdenom e da ScaleRAMPnum.
_ScaleVELmax
Valore massimo della scalatura velocità
0198441113763, V1.02, 12.2009
Questo valore dipende da ScaleVELdenom
e da ScaleVELnum.
_tq_act
Valore effettivo della coppia
%
100,0% corrisponde alla coppia continuativa di stallo _M_M_0.
In passi di 0,1%
INT16
R/-
Modbus 7752
_Ud_ref
Componente d della tensione motore nominale
V
-
INT16
R/-
Modbus 7690
V
-
UINT16
R/-
Modbus 7198
In passi di 0,1 V.
_UDC_act
Tensione sul bus DC
Mon
In passi di 0,1 V.
udcA
Servoamplificatore AC
325
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
_Udq_ref
Tensione totale del motore (somma vettoriale delle componenti d e q)
V
-
INT16
R/-
Modbus 7692
V
-
INT16
R/-
Modbus 7688
Radice quadrata di ( _Uq_ref2 + _Ud_ref2)
In passi di 0,1 V.
_Uq_ref
Componente q della tensione motore nominale
In passi di 0,1 V.
_v_act_ENC1
Velocità effettiva encoder 1
usr_v
-
INT32
R/-
Modbus 7762
_v_act
Velocità effettiva
usr_v
-
INT32
R/-
Modbus 7744
Velocità effettiva sull'interfaccia PTI
Inc/s
-2147483648
2147483647
INT32
R/-
Modbus 2060
usr_v
-
INT32
R/-
Modbus 7742
UINT32
R/-
Modbus 7250
%
-
INT16
R/-
Modbus 7718
0
0
1
UINT16
R/W
per.
-
Modbus 1580
Mon
VAct
_v_PTI_act
Frequenza di ripetizione impulsi rilevata
sull'interfaccia di posizione PTI.
_v_ref
Velocità di consegna
Mon
VrEF
usr_v
Valore della limitazione di velocità momenta- nea. In particolare, si tratta del più piccolo
dei seguenti valori:
- CTRL_v_max
- M_n_max (solo se è collegato un motore)
- Limitazione di velocità tramite ingresso
analogico
- Limitazione di velocità tramite ingresso digitale
_Vmax_act
Limitazione di velocità momentanea
_VoltUtil
Coefficiente di utilizzazione della tensione
bus DC
Mon
udcr
AbsHomeRequest
Al 100% l'azionamento si trova sul limite di
tensione.
Posizionamento assoluto solo dopo creazione del riferimento
0: no
1: sì
326
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
AccessLock
Locking other access channels
0
0
1
UINT16
R/W
-
Modbus 284
Arms
0.00
3.00
300.00
UINT16
R/W
per.
-
Modbus 2334
INT16
R/W
per.
-
Modbus 2340
UINT16
R/W
per.
-
Modbus 2332
Valore 0: abilitare il controllo attraverso gli
altri canali di accesso
Valore 1: bloccare il controllo attraverso gli
altri canali di accesso
Esempio:
Il canale di accesso viene utilizzato dal bus
di campo.
In questi casi non è possibile un controllo
tramite il software di messa in servizio o
l'HMI.
Il canale di accesso può essere bloccato
solo dopo che è stato terminato il modo operativo in corso.
Le impostazioni modificate vengono acquisite immediatamente.
AI1_I_max
ConF → i-oA1iL
Analogico 1: limitazione di corrente con 10
V (207)
In passi di 0,01 Arms.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI1_M_scale
ConF → i-oA1iS
Analogico 1: coppia per 10 V nel modo ope- %
-3000.0
rativo Profile Torque (207)
100.0
100,0% corrisponde alla coppia continuativa 3000.0
di stallo _M_M_0.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
AI1_mode
ConF → i-o-
0198441113763, V1.02, 12.2009
A1Mo
0
0 / None / nonE: nessuna funzione
1
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
Analogico 1: modo d'uso (206)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
327
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI1_offset
Analogico 1: tensione di offset (139)
ConF → i-oA1oF
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 2326
UINT16
R/W
per.
-
Modbus 2308
UINT32
R/W
per.
-
Modbus 2336
usr_v
-2147483648
6000
2147483647
INT32
R/W
per.
-
Modbus 2338
mV
0
0
1000
UINT16
R/W
per.
-
Modbus 2322
Arms
0.00
3.00
300.00
UINT16
R/W
per.
-
Modbus 2344
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
mV
-5000
L'ingresso analogico AI1 viene corretto/spo- 0
stato del valore di offset. La finestra di ten- 5000
sione zero eventualmente definita ha effetto
nell'intervallo di passaggio a zero
dell'ingresso analogico corretto AI1.
Le impostazioni modificate vengono acquisite immediatamente.
AI1_Tau
ConF → i-oA1Ft
ms
0.00
Filtro passa basso di primo ordine (PT1)
0.00
costante tempo filtrazione per ingresso ana- 327.67
logico AI1.
Analogico 1: costante tempo filtrazione
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
AI1_v_max
Analogico 1: limitazione della velocità con 10 usr_v
1
V (208)
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI1_v_scale
Analogico 1: velocità target con 10 V nel
modo operativo Profile Velocity (214)
La velocità massima è limitata all'impostazione di CTRL_v_max.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
Le impostazioni modificate vengono acquisite immediatamente.
AI1_win
Analogico 1: finestra di tensione zero (140)
ConF → i-o-
Valore fino al quale la tensione di ingresso
viene interpretata come 0 V.
Esempio: il valore 20 significa che la fascia
compresa tra -20 ... +20 mV viene interpretata come 0 mV.
A1Wn
AI2_I_max
ConF → i-oA2iL
Analogico 2: limitazione di corrente con 10
V (208)
In passi di 0,01 Arms.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
328
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
AI2_M_scale
Analogico 2: coppia per 10 V nel modo ope- %
rativo Profile Torque (207)
-3000.0
100.0
100,0% corrisponde alla coppia continuativa 3000.0
di stallo _M_M_0.
ConF → i-oA2iS
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT16
R/W
per.
-
Modbus 2350
UINT16
R/W
per.
-
Modbus 2342
INT16
R/W
per.
-
Modbus 2328
UINT16
R/W
per.
-
Modbus 2352
UINT32
R/W
per.
-
Modbus 2346
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
AI2_mode
ConF → i-oA2Mo
0
0 / None / nonE: nessuna funzione
0
1 / Target Velocity / SPdS: velocità target per 4
il regolatore di velocità
2 / Target Torque / trqS: coppia target per il
regolatore di corrente
3 / Velocity Limitation / LSPd: limitazione
della velocità per il regolatore di velocità
4 / Torque Limitation / Ltrq: limitazione
della coppia per il regolatore di corrente
Analogico 2: modo d'uso (206)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
AI2_offset
ConF → i-oA2oF
Analogico 2: tensione di offset (140)
mV
-5000
L'ingresso analogico AI2 viene corretto/spo- 0
stato del valore di offset. La finestra di ten- 5000
sione zero eventualmente definita ha effetto
nell'intervallo di passaggio a zero
dell'ingresso analogico corretto AI2.
Le impostazioni modificate vengono acquisite immediatamente.
AI2_Tau
ConF → i-oA2Ft
Analogico 2: costante tempo filtrazione
ms
0.00
Filtro passa basso di primo ordine (PT1)
0.00
costante tempo filtrazione per ingresso ana- 327.67
logico AI2.
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
AI2_v_max
Analogico 2: limitazione della velocità con 10 usr_v
V (208)
1
3000
La velocità massima è limitata all'imposta2147483647
zione di CTRL_v_max.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
329
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
AI2_v_scale
Analogico 2: velocità target con 10 V nel
modo operativo Profile Velocity (214)
usr_v
-2147483648
6000
2147483647
INT32
R/W
per.
-
Modbus 2348
mV
0
0
1000
UINT16
R/W
per.
-
Modbus 2324
UINT16
R/W
-
Modbus 12040
UINT32
R/W
-
Modbus 12038
La velocità massima è limitata all'impostazione di CTRL_v_max.
Anteponendo il segno negativo è possibile
invertire la valutazione del segnale analogico.
Le impostazioni modificate vengono acquisite immediatamente.
AI2_win
Analogico 2: finestra di tensione zero (140)
ConF → i-o-
Valore fino al quale la tensione di ingresso
viene interpretata come 0 V.
Esempio: il valore 20 significa che la fascia
compresa tra -20 ... +20 mV viene interpretata come 0 mV.
A2Wn
Le impostazioni modificate vengono acquisite immediatamente.
AT_dir
oP → tunStiM
Direzione di movimento per Autotuning (155) 1
1 / Positive Negative Home / Pnh: prima in 1
direzione positiva, poi in quella negativa con 6
ritorno alla posizione di riposo
2 / Negative Positive Home / nPh: prima in
direzione negativa, poi in quella positiva con
ritorno alla posizione di riposo
3 / Positive Home / P-h: solo in direzione
positiva con ritorno alla posizione di riposo
4 / Positive / P--: solo in direzione positiva
senza ritorno alla posizione di riposo
5 / Negative Home / n-h: solo in direzione
negativa con ritorno alla posizione di riposo
6 / Negative / n--: solo in direzione negativa
senza ritorno alla posizione di riposo
AT_dis
Campo di movimento Autotuning (155)
oP → tun-
Campo entro il quale viene eseguita la procedura automatica di ottimizzazione dei
parametri di anello di controllo. Va specificato il campo relativo alla posizione attuale.
NOTA: Con "Movimento in una sola direzione" (parametro AT_dir), il campo indicato
viene utilizzato per ogni passo di ottimizzazione. Il movimento effettivo corrisponde
generalmente a 20 volte il valore, ma non è
tuttavia limitato.
diSt
Giro
1.0
2.0
999.9
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
In passi di 0,1 giri
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
330
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
AT_mechanical
Tipo di accoppiamento del sistema (156)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
-
Modbus 12060
min-1
10
100
1000
UINT32
R/W
-
Modbus 12044
0
2
UINT16
R/W
-
Modbus 12034
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
1
1 / Direct Coupling: accoppiamento diretto 2
2 / Belt Axis: asse con cinghia
3
3 / Spindle Axis: asse a vite
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
AT_n_ref
Salto di velocità per Autotuning
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
AT_start
Avvio Autotuning (156)
Valore 0: Fine
Valore 1: Attiva EasyTuning
Valore 2: Attiva ComfortTuning
Le impostazioni modificate vengono acquisite immediatamente.
AT_wait
Tempo d'attesa tra le fasi di Autotuning (158) ms
300
Le impostazioni modificate vengono acqui- 500
site con lo movimento motore successivo.
10000
UINT16
R/W
-
Modbus 12050
BRK_AddT_apply
Ritardo aggiuntivo all'attivazione del freno
d'arresto (145)
INT16
R/W
per.
-
Modbus 1296
INT16
R/W
per.
-
Modbus 1294
Il ritardo totale per l'attivazione del freno
d'arresto corrisponde alla somma tra il
ritardo memorizzato nella targhetta elettronica del motore e il ritardo aggiuntivo impostato in questo parametro.
ms
0
0
1000
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
ms
0
0
Il ritardo totale per il rilascio del freno d'arre- 400
sto corrisponde alla somma tra il ritardo
memorizzato nella targhetta elettronica del
motore e il ritardo aggiuntivo impostato in
questo parametro.
BRK_AddT_releas Ritardo aggiuntivo al rilascio del freno
e
d'arresto (144)
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
331
11 Parametri
Nome parametro
Menu HMI
Nome HMI
LXM32C
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
CLSET_p_DiffWin Errore di posizionamento per commutazione record parametri
Giro
0.0000
0.0100
Se l'errore di posizionamento del regolatore 2.0000
di posizione è inferiore ai valori di questo
parametro, viene utilizzato il record parametri regolatore 2. Altrimenti viene utilizzato il
record parametri regolatore 1.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4408
UINT16
R/W
per.
-
Modbus 4404
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
0
0
0 / None Or Digital Input: nessuna oppure è 3
stata selezionata la funzione per ingresso
digitale
1 / Inside Position Deviation: all'interno
della distanza d'inseguimento (il valore è
indicato nel parametro CLSET_p_DiffWin)
2 / Below Reference Velocity: al di sotto
della velocià nominale (il valore è indicato
nel parametro CLSET__v_Threshol)
3 / Below Actual Velocity: al di sotto della
velocità effettiva (il valore è indicato nel parametro CLSET_v_Threshol)
CLSET_ParSwiCon Condizioni per la commutazione del record
d
parametri
Durante la commutazione dei parametri vengono modificati gradualmente i valori dei
seguenti parametri:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
- CTRL_TAUiref
- CTRL_KFPp
Scaduto il tempo d'attesa per la commutazione dei parametri, vengono modificati i
valori dei seguenti parametri
(CTRL_ParChgTime):
- CTRL_Nf1damp
- CTRL_Nf1freq
- CTRL_Nf1bandw
- CTRL_Nf2damp
- CTRL_Nf2freq
- CTRL_Nf2bandw
- CTRL_Osupdamp
- CTRL_Osupdelay
- CTRL_Kfric
332
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
11 Parametri
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
CLSET_v_Thresho Valore di soglia della velocità per la commu- usr_v
0
l
tazione dei parametri
50
Se la velocià nominale o la velocità effettiva 2147483647
sono inferiori ai valori di questo parametro,
viene utilizzato il record parametri regolatore
2. Altrimenti viene utilizzato il record parametri regolatore 1.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT32
R/W
per.
-
Modbus 4410
UINT16
R/W
per.
-
Modbus 4406
UINT16
R/W
per.
-
Modbus 4394
UINT16
R/W
per.
esperti
Modbus 4382
Le impostazioni modificate vengono acquisite immediatamente.
CLSET_winTime
Finestra tempo per la commutazione dei
parametri
Valore 0: monitoraggio finestra disattivato.
Valore >0: tempo finestra per i parametri
CLSET_v_Threshol e CLSET_p_DiffWin.
ms
0
0
1000
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_GlobGain
oP → tunGAin
Fattore di amplificazione globale (agisce sul %
5.0
record di parametri 1)
100.0
Il fattore di amplificazione globale agisce sui 1000.0
seguenti parametri del record parametri
regolatore 1:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
Il fattore di amplificazione globale viene
impostato al 100%
- se i parametri di anello di controllo vengono
impostati ai loro valori di fabbrica
- al termine dell'autotuning
- se il record parametri regolatore 2 con il
parametro CTRL_ParSetCopy viene copiato
sul record parametri regolatore 1
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_I_max_fw
Massima corrente di campo del regolatore
dell'attenuazione di campo
0198441113763, V1.02, 12.2009
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parametri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Arms
0.00
0.00
300.00
La corrente di attenuazione effettiva è il
valore minimo di CTRL_I_max_fw e la metà
del valore più piccolo tra la corrente nominale dello stadio finale e del motore.
In passi di 0,01 Arms.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
333
11 Parametri
LXM32C
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4376
%
0.0
0.0
350.0
UINT16
R/W
per.
esperti
Modbus 4372
CTRL_ParChgTime Intervallo di tempo per la commutazione del ms
record parametri regolatore (136)
0
0
Durante la commutazione dei parametri ven- 2000
gono modificati gradualmente i valori dei
seguenti parametri:
- CTRL_KPn
- CTRL_TNn
- CTRL_KPp
- CTRL_TAUnref
- CTRL_TAUiref
- CTRL_KFPp
UINT16
R/W
per.
-
Modbus 4392
Nome parametro
Menu HMI
Nome HMI
Descrizione
CTRL_I_max
Limitazione di corrente (137)
ConF → drCiMAX
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
0.00
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- 300.00
tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Durante il funzionamento, la limitazione di
corrente effettiva (_Imax_actual) è il più piccolo dei seguenti valori:
- CTRL_I_max
- M_I_max
- PA_I_max
- Limitazione di corrente da parte
dell'ingresso analogico
- Limitazione di corrente da parte
dell'ingresso digitale
(rispettivamente il valore più piccolo)
Vengono considerate ulteriori riduzioni della
corrente risultanti dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_KFAcc
Amplificazione accelerazione comando
pilota
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
Una commutazione dei parametri può
essere provocata dai seguenti eventi:
- Modifica del record parametri regolatore
attivo
- Modifica dell'amplificazione globale
- Modifica di uno dei parametri specificati
sopra
- Disattivazione dell'azione integrale del
regolatore di velocità
Le impostazioni modificate vengono acquisite immediatamente.
334
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
11 Parametri
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
-
Modbus 4396
0
1
2
UINT16
R/W
per.
-
Modbus 4400
0
1
Vedere CTRL_PwrUpParSet per la codifica. 2
Le impostazioni modificate vengono acquisite immediatamente.
UINT16
R/W
-
Modbus 4402
min-1
0
5
20
UINT32
R/W
per.
esperti
Modbus 4370
Costante tempo filtrazione per il livellamento ms
della velocità del motore
0.00
Il valore di default viene calcolato sulla base 30.00
dei dati motore.
UINT16
R/W
per.
esperti
Modbus 4368
UINT32
R/W
per.
-
Modbus 4384
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
0.0
Valore 1: copia il record parametri regolatore 1 sul record parametri regolatore 2
0.2
Valore 2: copia il record parametri regolatore
2 sul record parametri regolatore 1
CTRL_ParSetCopy Copia del record parametri regolatore
Se il record parametri regolatore 2 viene
copiato sul record parametri regolatore 1, il
parametro CTRL_GlobGain viene impostato
al 100%.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_PwrUpParSe Selezione del record parametri regolatore
t
durante l'inserimento
0 / Switching Condition: la condizione di
commutazione viene utilizzata per commutare il record parametri regolatore
1 / Parameter Set 1: viene utilizzato il record
parametri regolatore 1
2 / Parameter Set 2: viene utilizzato il record
parametri regolatore 2
Il valore selezionato viene scritto anche in
CTRL_ParSetSel (non persistente).
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_SelParSet
Selezione del record parametri regolatore
(non persistente) (135)
CTRL_SpdFric
Velocità sino alla quale la compensazione
dell'attrito è lineare
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_TAUnact
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
CTRL_v_max
ConF → drCnMAX
Limitazione di velocità (138)
usr_v
1
Il valore non deve essere superiore alla velo- 13200
cità massima del motore.
2147483647
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
335
11 Parametri
Nome parametro
Menu HMI
Nome HMI
LXM32C
Descrizione
CTRL_VelObsActi Attivazione Velocity Observer
v
0 / Velocity Observer Off: Velocity Observer off
1 / Velocity Observer Passive: Velocity
Observer on, ma non viene utilizzato per il
controllo del motore
2 / Velocity Observer Active: Velocity
Observer on e viene utilizzato per il controllo
del motore
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
0
2
UINT16
R/W
per.
esperti
Modbus 4420
ms
0.03
0.25
200.00
UINT16
R/W
per.
esperti
Modbus 4422
g cm2
1
2147483648
UINT32
R/W
per.
esperti
Modbus 4424
%
0.0
0.0
400.0
UINT16
R/W
per.
esperti
Modbus 4364
ms
0.01
0.25
10.00
UINT16
R/W
per.
esperti
Modbus 4362
Con il Velocity Observer viene ridotta l'ondulazione della velocità e aumentata la larghezza di banda del regolatore.
NOTA: prima dell'attivazione è necessario
impostare valori di dinamica e inerzia corretti.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_VelObsDyn
Dinamica Velocity Observer
Dinamica del Velocity Observers. Questa
costante di tempo deve essere nettamente
inferiore a quella del regolatore di velocità.
In passi di 0,01 ms.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_VelObsIner Inerzia per Velocity Observer
t
Inerzia di sistema che viene utilizzata per i
calcoli del Velocity Observer.
Per Autotuning, il valore di
CTRL_SpdObsInert può essere identico a
_AT_J.
I valore di default CTRL_SpdObsInert è
l'inerzia del motore montato.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
CTRL_vPIDDPart
Fattore D del regolatore di velocità PID
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL_vPIDTime
Costante di tempo del filtro di livellamento
per la quota D regolatore di velocità PID
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
336
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL1_KFPp
Velocità comando pilota
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
UINT16
R/W
per.
-
Modbus 4620
ConF → drC-
%
0.0
0.0
200.0
Arms
0.00
0.00
10.00
UINT16
R/W
per.
esperti
Modbus 4640
UINT16
R/W
per.
-
Modbus 4610
1/s
2.0
900.0
UINT16
R/W
per.
-
Modbus 4614
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4628
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4624
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4626
FPP1
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Kfric
Friction compensation: Gain
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_KPn
ConF → drCPn1
Coefficiente di proporzionalità (P) del regola- A/min-1
0.0001
tore di velocità (161)
Il valore di default viene ricavato dai parame- 1.2700
tri motore
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_KPp
ConF → drCPP1
Coefficiente P del regolatore di
posizione (169)
Il valore di default viene calcolato
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1bandw
Filtro Notch 1: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1damp
Filtro Notch 1: smorzamento
0198441113763, V1.02, 12.2009
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf1freq
Filtro Notch 1: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
337
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL1_Nf2bandw
Filtro Notch 2: larghezza di banda
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4634
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4630
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4632
%
0.0
0.0
50.0
UINT16
R/W
per.
esperti
Modbus 4636
ms
0.00
0.00
75.00
UINT16
R/W
per.
esperti
Modbus 4638
UINT16
R/W
per.
-
Modbus 4618
UINT16
R/W
per.
-
Modbus 4616
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf2damp
Filtro Notch 2: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Nf2freq
Filtro Notch 2: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Osupdamp
Filtro di sovramodulazione: smorzamento
Il valore 0 disinserisce il filtro.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_Osupdelay Filtro di sovramodulazione: ritardo
Il valore 0 disinserisce il filtro.
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL1_TAUiref
ms
0.00
0.50
Il valore di questo parametro viene commu- 4.00
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
Costante tempo filtrazione per il filtro del
valore di corrente nominale (166)
In passi di 0,01 ms.
CTRL1_TAUnref
ConF → drCtAu1
Costante tempo filtrazione per il filtro del
valore di consegna della velocità (164)
ms
0.00
9.00
Il valore di questo parametro viene commu- 327.67
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
338
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL1_TNn
Tempo di regolazione del regolatore di
velocità (162)
ms
0.00
327.67
UINT16
R/W
per.
-
Modbus 4612
%
0.0
0.0
200.0
UINT16
R/W
per.
-
Modbus 4876
Arms
0.00
0.00
10.00
UINT16
R/W
per.
esperti
Modbus 4896
UINT16
R/W
per.
-
Modbus 4866
1/s
2.0
900.0
UINT16
R/W
per.
-
Modbus 4870
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4884
ConF → drCtin1
Il valore di default viene calcolato da
CTRL_TAUiref.
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KFPp
Velocità comando pilota
ConF → drC-
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
FPP2
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Kfric
Friction compensation: Gain
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPn
ConF → drCPn2
Coefficiente di proporzionalità (P) del regola- A/min-1
0.0001
tore di velocità (161)
Il valore di default viene ricavato dai parame- 1.2700
tri motore
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,0001 A/min-1.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_KPp
ConF → drCPP2
Coefficiente P del regolatore di
posizione (169)
Il valore di default viene calcolato
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
0198441113763, V1.02, 12.2009
In passi di 0,1 1/s.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf1bandw
Filtro Notch 1: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
339
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL2_Nf1damp
Filtro Notch 1: smorzamento
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4880
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4882
%
1.0
70.0
90.0
UINT16
R/W
per.
esperti
Modbus 4890
%
55.0
90.0
99.0
UINT16
R/W
per.
esperti
Modbus 4886
Hz
50.0
1500.0
1500.0
UINT16
R/W
per.
esperti
Modbus 4888
%
0.0
0.0
50.0
UINT16
R/W
per.
esperti
Modbus 4892
ms
0.00
0.00
75.00
UINT16
R/W
per.
esperti
Modbus 4894
UINT16
R/W
per.
-
Modbus 4874
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf1freq
Filtro Notch 1: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf2bandw
Filtro Notch 2: larghezza di banda
La larghezza di banda viene definita come
segue: 1 - Fb/F0
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf2damp
Filtro Notch 2: smorzamento
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Nf2freq
Filtro Notch 2: frequenza
Il valore 15000 disinserisce il filtro.
In passi di 0,1 Hz.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Osupdamp
Filtro di sovramodulazione: smorzamento
Il valore 0 disinserisce il filtro.
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_Osupdelay Filtro di sovramodulazione: ritardo
Il valore 0 disinserisce il filtro.
In passi di 0,01 ms.
CTRL2_TAUiref
Costante tempo filtrazione per il filtro del
valore di corrente nominale (167)
ms
0.00
0.50
Il valore di questo parametro viene commu- 4.00
tato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
340
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
CTRL2_TAUnref
Costante tempo filtrazione per il filtro del
valore di consegna della velocità (164)
ms
0.00
9.00
327.67
UINT16
R/W
per.
-
Modbus 4872
ms
0.00
327.67
UINT16
R/W
per.
-
Modbus 4868
UINT16
R/W
-
Modbus 6914
UINT16
R/W
per.
-
Modbus 2112
ConF → drCtAu2
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
CTRL2_TNn
ConF → drCtin2
Tempo di regolazione del regolatore di
velocità (162)
Il valore di default viene calcolato da
CTRL_TAUiref.
Il valore di questo parametro viene commutato gradualmente con l'intervallo di tempo
impostato in CTRL_ParChgTime:
In passi di 0,01 ms.
Le impostazioni modificate vengono acquisite immediatamente.
DCOMcontrol
Per la codificazione binaria vedere il capitolo Funzionamento, Stati di funzionamento
Bit 0: Switch on
Bit 1: Enable Voltage
Bit 2: Quick Stop
Bit 3: Enable Operation
Bit 4 ... 6: specifici per modo operativo.
Bit 7: Fault Reset
Bit 8: arresto
Bit 9: Change on setpoint
Bit 10 ... 15: riservati (devono essere 0)
Parola di controllo DriveCom
Le impostazioni modificate vengono acquisite immediatamente.
DI_0_Debounce
Tempo di antirimbalzo DI0
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
0
6
6
0198441113763, V1.02, 12.2009
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
341
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
DI_1_Debounce
Tempo di antirimbalzo DI1
0
6
6
UINT16
R/W
per.
-
Modbus 2114
0
6
6
UINT16
R/W
per.
-
Modbus 2116
0
6
6
UINT16
R/W
per.
-
Modbus 2118
0
6
6
UINT16
R/W
per.
-
Modbus 2120
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
DI_2_Debounce
Tempo di antirimbalzo DI2
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
DI_3_Debounce
Tempo di antirimbalzo DI3
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
DI_4_Debounce
Tempo di antirimbalzo DI4
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
342
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
DI_5_Debounce
Tempo di antirimbalzo DI5
0
6
6
UINT16
R/W
per.
-
Modbus 2122
usr_p
-
INT32
R/W
-
Modbus 1324
1
2
3
UINT16
R/W
per.
-
Modbus 1300
0 / No: nessun antirimbalzo software
1 / 0.25 ms: 0,25 ms
2 / 0.50 ms: 0,50 ms
3 / 0.75 ms: 0,75 ms
4 / 1.00 ms: 1,00 ms
5 / 1.25 ms: 1,25 ms
6 / 1.50 ms: 1,50 ms
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
ENC1_adjustment Regolazione della posizione assoluta
dell'encoder 1 (148)
La fascia di valori dipende dal tipo di encoder.
Encoder Singleturn:
0 ... max_pos_usr/rev. - 1
Encoder Multiturn:
0 ... (4096 * max_pos_usr/rev.) -1
max_pos_usr/rev.: posizione utente massima per una rotazione completa del motore.
Con la scalatura di default, questo valore è
pari a 16384.
NOTA:
* Per eseguire la lavorazione con inversione
di direzione, quest'ultima deve essere impostata prima di definire la posizione dell'encoder
* Dopo l'accesso in scrittura è necessario
attendere almeno 1 secondo prima di disinserire l'azionamento.
* Modificando il valore, si determina anche
un movimento della posizione dell'impulso di
posizione virtuale e dell'impulso di posizione
per la simulazione encoder.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
0198441113763, V1.02, 12.2009
ErrorResp_Flt_A Reazione ad errore in caso di assenza di
C
una fase della rete in apparecchi
trifase (259)
1 / Error Class 1: classe di errore 1
2 / Error Class 2: classe di errore 2
3 / Error Class 3: classe di errore 3
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
343
11 Parametri
Nome parametro
Menu HMI
Nome HMI
LXM32C
Descrizione
ErrorResp_I2tRE Reazione ad errore in caso di resistenza di
S
frenatura I2t al 100%
0 / Warning: avvertimento (classe di errore
0)
1 / Error Class 1: classe di errore 1
2 / Error Class 2: classe di errore 2
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
0
2
UINT16
R/W
per.
-
Modbus 1348
1
3
3
UINT16
R/W
per.
-
Modbus 1302
UINT16
R/W
per.
-
Modbus 1322
1
1
2147483647
INT32
R/W
per.
-
Modbus 9734
1
1
2147483647
INT32
R/W
per.
-
Modbus 9752
UINT16
R/W
per.
-
Modbus 9738
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
ErrorResp_p_dif Reazione ad errore d'inseguimento (257)
1 / Error Class 1: classe di errore 1
2 / Error Class 2: classe di errore 2
3 / Error Class 3: classe di errore 3
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
ESIM_scale
ConF → i-oESSC
Risoluzione della simulazione encoder (218) EncInc
8
La risoluzione è il numero di incrementi per 4096
giro (segnale AB con valutazione quadru65535
pla).
L'impulso di posizione viene prodotto una
volta per giro in un intervallo in cui il segnale
A e il segnale B sono su High.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
GEARdenom
Denominatore del rapporto di
trasmissione (199)
vedere la descrizione di GEARnum
GEARdenom2
Denominatore del rapporto di trasmissione
numero 2 (199)
vedere la descrizione di GEARnum
GEARdir_enabl
Direzione di movimento abilitato per il modo Riduttore (201)
1
3
1 / Positive: senso positivo
3
2 / Negative: senso negativo
3 / Both: entrambi i sensi di rotazione
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Permette di attivare un'interdizione del movimento di ritorno.
Le impostazioni modificate vengono acquisite immediatamente.
344
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
GEARnum
Numeratore del rapporto di
trasmissione (198)
-2147483648
1
2147483647
INT32
R/W
per.
-
Modbus 9736
-2147483648
1
2147483647
INT32
R/W
per.
-
Modbus 9754
UINT16
R/W
per.
-
Modbus 9750
GEARnum
---------------------- = Gear ratio
GEARdenom
Il nuovo rapporto di trasmissione viene
acquisito al caricamento del valore relativo al
numeratore.
Le impostazioni modificate vengono acquisite immediatamente.
GEARnum2
Numeratore del rapporto di trasmissione
numero 2 (199)
GEARnum2
---------------------- = Gear ratio
GEARdenom2
Il nuovo rapporto di trasmissione viene
acquisito al caricamento del valore relativo al
numeratore.
Le impostazioni modificate vengono acquisite immediatamente.
GEARposChgMode
Considerazione delle modifiche di posizione 0
con stadio finale non attivo (200)
0
0 / Off: negli stati con stadio finale non attivo 1
le modifiche di posizione vengono ignorate
1 / On: negli stati con stadio finale non attivo
le modifiche di posizione vengono considerate
L'impostazione ha effetto solo se il riduttore
elettronico viene avviato nel tipo di elaborazione "Sincronizzazione con movimento di
compensazione".
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
345
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
GEARratio
Selezione di rapporti di trasmissione
speciali (198)
0
0
11
UINT16
R/W
per.
-
Modbus 9740
UINT16
R/W
per.
-
Modbus 14852
0
0
1
UINT16
R/W
per.
-
Modbus 14850
0
0
0 / Inversion Off: inversione della direzione 1
di conteggio disattivata
1 / Inversion On: inversione della direzione
di conteggio attivata
UINT16
R/W
per.
-
Modbus 2062
ConF → i-oGFAC
0 / Gear Factor / FAct: uso del rapporto di
trasmissione impostato con GEARnum/
GEARdenom
1 / 200 / 200: 200
2 / 400 / 400: 400
3 / 500 / 500: 500
4 / 1000 / 1000: 1000
5 / 2000 / 2000: 2000
6 / 4000 / 4000: 4000
7 / 5000 / 5000: 5000
8 / 10000 / 10.00: 10000
9 / 4096 / 4096: 4096
10 / 8192 / 8192: 8192
11 / 16384 / 16.38: 16384
Una modifica della grandezza pilota di entità
pari al valore indicato determina una rotazione completa del motore.
Le impostazioni modificate vengono acquisite immediatamente.
HMIDispPara
Mon
SuPV
0
0
0 / OperatingState / StAt: stato di funziona- 2
mento
1 / v_act / VAct: velocità effettiva del motore
2 / I_act / iAct: corrente effettiva del motore
Visualizzazione HMI durante il movimento
motore
Le impostazioni modificate vengono acquisite immediatamente.
HMIlocked
Blocco HMI
0 / Not Locked / nLoc: HMI non bloccata
1 / Locked / Loc: HMI bloccata
Quando l'HMI è bloccata non è più possibile
eseguire le seguenti azioni:
- modifica dei parametri
- Jog
- Autotuning
- Fault Reset
InvertDirOfCount
Inversione della direzione di conteggio
sull'interfaccia PTI (197)
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
Le impostazioni modificate vengono acquisite immediatamente.
346
Servoamplificatore AC
LXM32C
Nome parametro
Menu HMI
Nome HMI
11 Parametri
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
0
0
1
UINT16
R/W
per.
-
Modbus 1560
Attivazione dello stadio finale durante l'inse- rimento
0
0
0 / Off / oFF: durante l'accelerazione, una 2
funzione di ingresso segnale attiva non inserisce lo stadio finale
1 / On / on: durante l'accelerazione, una
funzione di ingresso segnale attiva inserisce
lo stadio finale
2 / AutoOn / Auto: durante l'accelerazione,
lo stadio finale viene inserito automaticamente
UINT16
R/W
per.
-
Modbus 1292
UINT16
R/W
-
Modbus 2082
Descrizione
InvertDirOfMove Inversione del senso di movimento (216)
ConF → ACGinMo
0 / Inversion Off / oFF: inversione del
senso di movimento disattivata
1 / Inversion On / on: inversione del senso
di movimento attivata
valore 0:
Motori rotativi: in caso di direzione positiva
l'albero motore ruota in senso orario, guardando la flangia dell'albero motore. In caso
di direzione negativa l'albero motore ruota in
senso antiorario, guardando la flangia
dell'albero motore.
valore 1:
Motori rotativi: in caso di direzione positiva
l'albero motore ruota in senso antiorario,
guardando la flangia dell'albero motore. In
caso di direzione negativa l'albero motore
ruota in senso orario, guardando la flangia
dell'albero motore.
L'interruttore di finecorsa che viene raggiunto con un movimento in direzione positiva deve essere collegato con l'ingresso per
l'interruttore di finecorsa positivo e viceversa.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
IO_AutoEnable
ConF → ACGioAE
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
0198441113763, V1.02, 12.2009
IO_DQ_set
Impostazione diretta di uscite digitali
L'accesso in scrittura a bit di uscita è efficace solo se il pin del segnale è presente
come uscita e la funzione di uscita è impostata su 'liberamente disponibile'.
-
Codifica dei singoli segnali:
Bit 0: DQ0
Bit 1: DQ1
Bit 2: DQ2
Bit 3: DQ3
Bit 4: DQ4
Servoamplificatore AC
347
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IO_GEARmethod
Tipo di elaborazione per il modo operativo
Electronic Gear (199)
1
1
3
UINT16
R/W
per.
-
Modbus 1326
Arms
0.00
0.20
300.00
UINT16
R/W
per.
-
Modbus 1614
UINT16
R/W
per.
-
Modbus 1328
UINT16
R/W
per.
-
Modbus 1630
UINT32
R/W
per.
-
Modbus 1596
ConF → ACGioGM
1 / Position Synchronization Immediate /
PoiM: sincronizzazione di posizione senza
movimento di compensazione
2 / Position Synchronization Compensated / Poco: sincronizzazione di posizione con
movimento di compensazione
3 / Velocity Synchronization / VELo: sincronizzazione di velocità
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
IO_I_limit
ConF → i-oiLiM
Limitazione di corrente tramite
ingresso (269)
Una limitazione di corrente può essere attivata con un ingresso digitale.
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
IO_JOGmethod
ConF → ACGioJG
0
0 / Continuous Movement / coMo: Jog con 0
movimento continuo
1
1 / Step Movement / StMo: Jog con movimento progressivo
Selezione del metodo per Jog (192)
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
IO_ModeSwitch
ConF → ACGioMS
Modo operativo per la funzione di ingresso
segnale commutazione modo
operativo (187)
0 / None / nonE: Nessuno
1 / Profile Torque / torq: Profile Torque
2 / Profile Velocity / VELP: Profile Velocity
3 / Electronic Gear / GEAr: Electronic Gear
0
0
3
Le impostazioni modificate vengono acquisite immediatamente.
IO_v_limit
Limitazione di velocità tramite ingresso (269) usr_v
1
Una limitazione di velocità può essere atti- 10
vata con un ingresso digitale.
2147483647
NOTA: nel modo operativo Profile Torque, la
velocità minima viene limitata internamente
a 100 min-1.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
348
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOdefaultMode
Modo operativo (187)
0 / None / nonE: Nessuno
1 / Profile Torque / torq: Profile Torque
2 / Profile Velocity / VELP: Profile Velocity
3 / Electronic Gear / GEAr: Electronic Gear
5 / Jog / JoG: Jog
UINT16
R/W
per.
-
Modbus 1286
ConF → ACG-
0
5
5
io-M
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
349
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI0
Funzione ingresso DI0 (226)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1794
ConF → i-o-
-
di0
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
350
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI1
Funzione ingresso DI1 (227)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1796
ConF → i-o-
-
di1
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
351
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI2
Funzione ingresso DI2 (228)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1798
ConF → i-o-
-
di2
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
352
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI3
Funzione ingresso DI3 (229)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1800
ConF → i-o-
-
di3
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
353
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI4
Funzione ingresso DI4 (230)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1802
ConF → i-o-
-
di4
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
354
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DI5
Funzione ingresso DI5 (231)
1 / Freely Available / nonE: liberamente
disponibile
2 / Fault Reset / FrES: Fault Reset dopo
errore
3 / Enable / EnAb: attiva lo stadio finale
4 / Halt / hALt: Halt
6 / Current Limitation / iLiM: limita la corrente al valore del parametro
7 / Zero Clamp / CLMP: Zero Clamp
8 / Velocity Limitation / VLiM: limita la velocità al valore del parametro
9 / Jog Positive / JoGP: Jog: movimento in
direzione positiva
10 / Jog Negative / JoGn: Jog: movimento
manuale in direzione negativa
11 / Jog Fast/Slow / JoGF: Jog: passa dal
movimento rapido a quello lento e viceversa
12 / Gear Ratio Switch / GrAt: Electronic
Gear: effettua la commutazione tra due rapporti di trasmissione
19 / Gear Offset 1 / GoF1: Electronic Gear:
primo offset riduttore
20 / Gear Offset 2 / GoF2: Electronic Gear:
secondo offset riduttore
21 / Reference Switch (REF) / rEF: interruttore di riferimento
22 / Positive Limit Switch (LIMP) / LiMP:
interruttore di finecorsa positivo
23 / Negative Limit Switch (LIMN) / LiMn:
interruttore di finecorsa negativo
24 / Switch Controller Parameter Set /
CPAr: commuta il record parametri regolatore
25 / Inversion AI1 / A1iV: inverte l'ingresso
analogico AI1
26 / Inversion AI2 / A2iV: inverte l'ingresso
analogico AI2
27 / Operating Mode Switch / MSWt: cambia
il modo operativo
28 / Velocity Controller Integral Off / tnoF:
disinserisce l'azione integrale del regolatore
di velocità
UINT16
R/W
per.
-
Modbus 1804
ConF → i-o-
-
di5
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
355
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ0
Funzione uscita DQ0 (233)
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1810
ConF → i-o-
-
-
UINT16
R/W
per.
-
Modbus 1812
do0
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
IOfunct_DQ1
Funzione uscita DQ1 (233)
ConF → i-o-
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
do1
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
356
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ2
Funzione uscita DQ2 (234)
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1814
ConF → i-o-
-
-
UINT16
R/W
per.
-
Modbus 1816
do2
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
IOfunct_DQ3
Funzione uscita DQ3 (234)
ConF → i-o-
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
0198441113763, V1.02, 12.2009
do3
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
357
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
IOfunct_DQ4
Funzione uscita DQ4 (235)
1 / Freely Available / nonE: liberamente
disponibile
2 / No Fault / nFLt: segnala gli stati di funzionamento Ready To Switch On, Switched
On e Operation Enable
3 / Active / Acti: segnala lo stato di funzionamento Operation Enable
5 / In Position Deviation Window / in-P:
distanza d'inseguimento all'interno della
finestra
6 / In Velocity Deviation Window / in-V:
scostamento di velocità all'interno della finestra
7 / Velocity Below Threshold / Vthr: velocità motore al di sotto del valore soglia
8 / Current Below Threshold / ithr: corrente del motore al di sotto del valore soglia
9 / Halt Acknowledge / hALt: conferma Halt
13 / Motor Standstill / MStd: motore fermo
14 / Selected Error / SErr: è presente uno
degli errori selezionati
16 / Selected Warning / SWrn: è presente
una delle avvertenze selezionate
UINT16
R/W
per.
-
Modbus 1818
ConF → i-o-
-
0
1
2
UINT16
R/W
per.
-
Modbus 1566
0
1
2
UINT16
R/W
per.
-
Modbus 1568
do4
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
IOsigLIMN
Valutazione segnali per interruttore di finecorsa negativo (272)
0 / Inactive: inattivo
1 / Normally closed: contatto normalmente
chiuso
2 / Normally open: contatto normalmente
aperto
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
IOsigLIMP
Valutazione segnali per interruttore di finecorsa positivo (272)
0 / Inactive: inattivo
1 / Normally closed: contatto normalmente
chiuso
2 / Normally open: contatto normalmente
aperto
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
358
Servoamplificatore AC
LXM32C
11 Parametri
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1564
usr_p
1
20
2147483647
INT32
R/W
per.
-
Modbus 10510
ms
1
500
32767
UINT16
R/W
per.
-
Modbus 10512
UINT32
R/W
per.
-
Modbus 10506
UINT32
R/W
per.
-
Modbus 10504
INT16
R/W
per.
-
Modbus 1582
Nome parametro
Menu HMI
Nome HMI
Descrizione
IOsigREF
1
1
1 / Normally Closed: contatto normalmente 2
chiuso
2 / Normally Open: contatto normalmente
aperto
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Valutazione segnali per interruttore di riferimento
L'interruttore di riferimento viene attivato soltanto durante l'elaborazione del movimento
verso riferimento fino all'interruttore di riferimento.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
JOGstep
Percorso per movimento progressivo (192)
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
JOGtime
Tempo d'attesa per movimento
progressivo (192)
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
JOGv_fast
oP → JoGJGhi
usr_v
1
Il valore viene limitato internamente all'impo- 180
stazione corrente del parametro
2147483647
RAMP_v_max.
Velocità per movimento rapido (191)
Le impostazioni modificate vengono acquisite immediatamente.
JOGv_slow
oP → JoGJGLo
Velocità per movimento lento (191)
usr_v
1
Il valore viene limitato internamente all'impo- 60
stazione corrente del parametro
2147483647
RAMP_v_max.
Le impostazioni modificate vengono acquisite immediatamente.
0198441113763, V1.02, 12.2009
LIM_HaltReactio Halt option code (265)
n
1 / Deceleration Ramp / dEcE: rampa di
ConF → ACGdecelerazione
3 / Torque Ramp / torq: rampa di coppia
htyP
Tipo di decelerazione all'arresto
1
1
3
Impostazione della rampa di decelerazione
con il parametro RAMP_v_dec.
Impostazione della rampa di coppia con il
parametro LIM_I_maxHalt.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
359
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
LIM_I_maxHalt
Limitazione di corrente per Halt (138)
ConF → ACGhcur
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 4380
UINT16
R/W
per.
-
Modbus 4378
Nell'arresto la limitazione di corrente effettiva
(_Imax_actual) corrisponde al più basso dei
seguenti valori:
- LIM_I_maxHalt
- M_I_max
- PA_I_max
Anche durante un arresto vengono considerate ulteriori riduzioni della corrente risultanti
dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
Le impostazioni modificate vengono acquisite immediatamente.
LIM_I_maxQSTP
ConF → FLtqcur
Limitazione di corrente per Quick Stop (137) Arms
Questo valore è limitato soltanto dai valori
minimo e massimo dell'intervallo di parame- tri (nessuna limitazione del valore da parte
del motore o dello stadio finale)
Nel Quick Stop la limitazione di corrente
effettiva (_Imax_actual) corrisponde al più
basso dei seguenti valori:
- LIM_I_maxQSTP
- M_I_max
- PA_I_max
Anche durante un Quick Stop vengono considerate ulteriori riduzioni della corrente
risultanti dal monitoraggio I2t.
Default: PA_I_max con 4kHz di frequenza
PWM e tensione di rete pari a 230V/480V
In passi di 0,01 Arms.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
360
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
LIM_QStopReact
Codice opzione Quick Stop
6 / Deceleration ramp / dEcE: rampa di
decelerazione
7 / Torque ramp / torq: rampa di coppia
INT16
R/W
per.
-
Modbus 1584
ConF → FLt-
6
6
7
0
0
1
UINT16
R/W
per.
-
Modbus 1344
1
1
247
UINT16
R/W
per.
-
Modbus 5640
9600
19200
38400
UINT16
R/W
per.
-
Modbus 5638
UINT16
R/W
per.
-
Modbus 1594
qtyP
Tipo di decelerazione per Quick Stop
Impostazione della rampa di decelerazione
con il parametro RAMPquickstop.
Impostazione della rampa di coppia con il
parametro LIM_I_maxQSTP.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
Mains_reactor
Induttanza di rete
0 / No: no
1 / Yes: sì
Valore 0: nessuna induttanza di rete collegata. La potenza nominale dello stadio finale
viene ridotta.
Valore 1: induttanza di rete collegata.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
MBaddress
Indirizzo Modbus
ConF → CoM-
Indirizzi validi: da 1 a 247
MbAd
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
MBbaud
Velocità di trasmissione Modbus
ConF → CoM-
9600 / 9600 Baud / 9.6: 9600 Baud
19200 / 19200 Baud / 19.2: 19200 Baud
38400 / 38400 Baud / 38.4: 38400 Baud
Mbbd
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
MON_ChkTime
ConF → i-o-
0198441113763, V1.02, 12.2009
tthr
Finestra tempo di monitoraggio (275)
ms
0
Impostazione di un intervallo di tempo per il 0
monitoraggio di errore di posizionamento,
9999
errore di velocità, valore di velocità e valore
di corrente. Se il valore monitorato per l'intervallo di tempo impostato rientra nell'intervallo ammesso, la funzione di monitoraggio
emette un risultato positivo.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
361
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
MON_commutat
Monitoraggio della commutazione (258)
0
1
1
UINT16
R/W
per.
-
Modbus 1290
0
0 / Off: monitoraggio dei guasti a terra disat- 1
tivato
1
1 / On: monitoraggio dei guasti a terra attivato
UINT16
R/W
per.
esperti
Modbus 1312
Arms
0.00
0.20
300.00
UINT16
R/W
per.
-
Modbus 1592
0
0
65535
UINT16
R/W
per.
-
Modbus 15116
0
0
65535
UINT16
R/W
per.
-
Modbus 15118
0
0
65535
UINT16
R/W
per.
-
Modbus 15120
0 / Off: monitoraggio della commutazione
disattivato
1 / On: monitoraggio della commutazione
attivato
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
MON_GroundFault Monitoraggio dei guasti a terra (261)
In casi eccezionali può essere necessario
disattivare questa funzione, ad esempio:
- collegamento in parallelo di più apparecchi
tramite il bus DC
- cavi motore lunghi
Disattivare il monitoraggio dei guasti a terra
se questo reagisce in modo indesiderato.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
MON_I_Threshold Monitoraggio del valore soglia di
corrente (281)
ConF → i-oViene effettuato un controllo per verificare se
ithr
l'azionamento durante l'intervallo di tempo
parametrizzato mediante MON_ChkTime si
trovi al di sotto del valore definito.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Come valore comparativo viene utilizzato il
valore del parametro _Iq_act_rms.
In passi di 0,01 Arms.
MON_IO_SelErr1
Primo numero per la funzione di uscita
segnale Selected Error
Le impostazioni modificate vengono acquisite immediatamente.
MON_IO_SelErr2
Secondo numero per la funzione di uscita
segnale Selected Error
Le impostazioni modificate vengono acquisite immediatamente.
MON_IO_SelWar1
Primo numero per la funzione di uscita
segnale Selected Warning
Le impostazioni modificate vengono acquisite immediatamente.
362
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
MON_IO_SelWar2
Secondo numero per la funzione di uscita
segnale Selected Warning
0
0
65535
UINT16
R/W
per.
-
Modbus 15122
UINT16
R/W
per.
esperti
Modbus 1310
UINT32
R/W
per.
-
Modbus 1606
Le impostazioni modificate vengono acquisite immediatamente.
MON_MainsVolt
Identificazione e monitoraggio delle fasi della 0
rete (260)
0
0 / Automatic Mains Detection: identifica- 4
zione automatica e monitoraggio della tensione di rete
1 / DC-Bus Only (Mains 230/480 V): solo
alimentazione tramite bus DC, corrisponde a
una tensione di rete pari a 230 V (monofase)
o 480 V (trifase)
2 / DC-Bus Only (Mains 115 V): solo alimentazione tramite bus DC, corrisponde a
una tensione di rete pari a 115 V (monofase)
3 / Mains 230/480 V: tensione di rete pari a
230 V (monofase) o 480 V (trifase)
4 / Mains 115 V: tensione di rete pari a 115
V (monofase)
Valore 0: in caso di apparecchi monofase
l'apparecchio, non appena viene rilevata la
tensione di rete, verifica automaticamente se
questa sia pari a 115 V o a 230 V.
Valori 1 ... 2: se l'apparecchio viene alimentato solo dal bus DC, il parametro deve
essere impostato sullo stesso valore di tensione dell'apparecchio alimentato. Un monitoraggio della tensione di rete non viene
effettuato.
Valori 3 ... 4: se in fase di accelerazione la
tensione di rete non viene rilevata correttamente, la tensione da utilizzare può essere
impostata manualmente.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
0198441113763, V1.02, 12.2009
MON_p_dif_load
Errore di posizionamento massimo dovuto al Giro
0.0001
carico (errore d'inseguimento) (257)
1.0000
L'errore di posizionamento dovuto al carico è 200.0000
la differenza tra valore di consegna di posizione e posizione effettiva provocata dal
carico.
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
363
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
MON_p_dif_warn
Errore di posizionamento massimo dovuto al %
carico (avvertenza) (257)
0
75
100,0% corrisponde all'errore di posiziona- 100
mento massimo (errore d'inseguimento)
impostato nel parametro MON_p_dif_load.
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1618
UINT16
R/W
per.
-
Modbus 1586
UINT16
R/W
per.
-
Modbus 1608
UINT16
R/W
per.
-
Modbus 1610
Le impostazioni modificate vengono acquisite immediatamente.
MON_p_DiffWin
Giro
0.0000
0.0010
Viene effettuato un controllo per verificare se 0.9999
l'azionamento durante l'intervallo di tempo
parametrizzato mediante MON_ChkTime si
trovi all'interno dello scostamento ammesso.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Monitoraggio dell'errore di
posizionamento (275)
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
MON_p_win
Finestra di inattività, scostamento ammesso Giro
0.0000
Affinché un arresto dell'azionamento venga 0.0010
riconosciuto, nell'arco di tempo della finestra 3.2767
di inattività lo scostamento deve trovarsi
all'interno di questo intervallo di valori.
L'elaborazione della finestra di inattività deve
essere attivata con il parametro
MON_p_winTime.
In passi di 0,0001 giri
Le impostazioni modificate vengono acquisite immediatamente.
MON_p_winTime
ms
0
Valore 0: monitoraggio della finestra di inatti- 0
vità disattivato
32767
Valore >0 : tempo in ms durante il quale lo
scostamento deve trovarsi nella finestra di
inattività
Finestra di inattività, tempo
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
364
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
MON_p_winTout
Tempo di timeout per il monitoraggio della
finestra di inattività
ms
0
0
16000
UINT16
R/W
per.
-
Modbus 1612
0
0
3
UINT16
R/W
per.
-
Modbus 1542
INT32
R/W
per.
-
Modbus 1546
INT32
R/W
per.
-
Modbus 1544
Valore 0: monitoraggio del timeout disattivato
Valore >0 : tempo di timeout in ms
I valori per l'elaborazione della finestra di
inattività vengono impostati nei parametri
MON_p_win e MON_p_winTime.
Il monitoraggio del tempo ha inizio
nell'istante in cui viene raggiunta la posizione target (valore di consegna di posizione
del regolatore di posizione) o dalla fine elaborazione del generatore di profili.
Le impostazioni modificate vengono acquisite immediatamente.
MON_SW_Limits
Monitoraggio degli interruttori di finecorsa
software
0 / None: disattivato
1 / SWLIMP: attivazione finecorsa software
senso positivo
2 / SWLIMN: attivazione finecorsa software
senso negativo
3 / SWLIMP+SWLIMN: attivazione degli
interruttori di finecorsa software entrambi i
sensi
Il monitoraggio degli interruttori di finecorsa
software è operativo soltanto se la creazione
del riferimento è stata eseguita correttamente (ref_ok = 1)
Le impostazioni modificate vengono acquisite immediatamente.
MON_swLimN
Limite di posizionamento negativo per inter- usr_p
ruttore di finecorsa software
-2147483648
Vedere la descrizione 'MON_swLimP'
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
0198441113763, V1.02, 12.2009
MON_swLimP
usr_p
2147483647
Se si imposta un valore utente che non rien- tra nell'intervallo ammesso, a livello interno
viene automaticamente impostato quale
limite degli interruttori di finecorsa il valore
utente massimo.
Limite di posizionamento positivo per interruttore di finecorsa software
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
Servoamplificatore AC
365
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
MON_tq_win
Finestra di coppia, scostamento ammesso
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
%
0.0
La finestra di coppia può essere attivata sol- 3.0
tanto nel modo operativo Profile Torque.
3000.0
In passi di 0,1%
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1626
UINT16
R/W
per.
-
Modbus 1628
UINT32
R/W
per.
-
Modbus 1588
UINT32
R/W
per.
-
Modbus 1590
UINT32
R/W
per.
-
Modbus 1576
Le impostazioni modificate vengono acquisite immediatamente.
MON_tq_winTime
ms
0
Valore 0: monitoraggio della finestra di cop- 0
pia disattivato
16383
Finestra di coppia, tempo
La modifica del valore provoca il riavvio del
monitoraggio della coppia.
NOTA: La finestra di coppia può essere attivata soltanto nel modo operativo Profile Torque.
Le impostazioni modificate vengono acquisite immediatamente.
MON_v_DiffWin
usr_v
1
Viene effettuato un controllo per verificare se 10
l'azionamento durante l'intervallo di tempo
2147483647
parametrizzato mediante MON_ChkTime si
trovi all'interno dello scostamento ammesso.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Monitoraggio dell'errore di velocità (277)
Le impostazioni modificate vengono acquisite immediatamente.
MON_v_Threshold Monitoraggio del valore soglia di
velocità (279)
usr_v
1
10
Viene effettuato un controllo per verificare se 2147483647
l'azionamento durante l'intervallo di tempo
parametrizzato mediante MON_ChkTime si
trovi al di sotto del valore definito.
Lo stato può essere visualizzato attraverso
un'uscita parametrizzabile.
Le impostazioni modificate vengono acquisite immediatamente.
MON_v_win
Finestra di velocità, scostamento ammesso
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
usr_v
1
10
2147483647
366
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
MON_v_winTime
Finestra di velocità, tempo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1578
usr_v
0
10
2147483647
UINT32
R/W
per.
-
Modbus 1616
Giro
0.0
1.0
999.9
UINT16
R/W
-
Modbus 11782
usr_a
1
600
2147483647
UINT32
R/W
per.
-
Modbus 9996
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
ms
0
Valore 0: monitoraggio della finestra di velo- 0
cità disattivato
16383
La modifica del valore provoca il riavvio del
monitoraggio della velocità.
NOTA: la finestra di velocità può essere utilizzata soltanto nei modi operativi Profile
Velocity ed Electronic Gear (sincronizzazione di velocità).
Le impostazioni modificate vengono acquisite immediatamente.
MON_v_zeroclamp Limitazione di velocità per Zero Clamp
Zero Clamp è solo possibile se la velocità
nominale è inferiore al valore limite per la
velocità di Zero Clamp.
Le impostazioni modificate vengono acquisite immediatamente.
MT_dismax
Massima distanza ammessa
Se con grandezza pilota attiva viene superata la massima distanza ammessa, si verifica un errore di classe 1.
Il valore 0 disattiva il monitoraggio.
In passi di 0,1 giri
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
OFS_Ramp
Accelerazione e decelerazione per il movimento di offset (201)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
OFSp_RelPos1
Posizione di offset relativa 1 per la funzione Inc
-2147483648
di ingresso segnale Gear Offset 1 (201)
0
Le impostazioni modificate vengono acqui- 2147483647
site immediatamente.
INT32
R/W
per.
-
Modbus 10000
OFSp_RelPos2
Posizione di offset relativa 2 per la funzione Inc
di ingresso segnale Gear Offset 2 (201)
-2147483648
0
Le impostazioni modificate vengono acqui- 2147483647
site immediatamente.
INT32
R/W
per.
-
Modbus 10004
Servoamplificatore AC
367
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
OFSv_target
Velocità target per il movimento di
offset (201)
usr_v
1
60
2147483647
UINT32
R/W
per.
-
Modbus 9992
UINT16
R/W
-
Modbus 1038
UINT16
R/W
-
Modbus 1026
Se il fattore della scalatura velocità
ammesso è pari a 1 il valore massimo consentito è pari a 5000.
Ciò vale per tutti i fattori di scalatura definiti
dall'utente. Esempio se il fattore definito
dall'utente per la scalatura velocità è pari a 2
(ScaleVELnum = 2, ScaleVELdenom = 1), il
valore massimo consentito è pari a 2500.
Le impostazioni modificate vengono acquisite immediatamente.
PAR_CTRLreset
ConF → FCSrESC
Ripristino dei parametri di anello di controllo 0
0 / No / no: no
0
1 / Yes / yES: sì
1
Tutti i parametri di anello di controllo vengono resettati. I parametri del regolatore di
corrente vengono ricalcolati in base ai dati
del motore collegato.
NOTA: le limitazioni di corrente e di velocità
non vengono resettate. Di conseguenza è
necessario resettare i parametri utente.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
PAReeprSave
Memorizzazione dei valori dei parametri
nella memoria EEPROM
Valore 1: memorizzazione di tutti i parametri persistenti
I parametri momentaneamente impostati
vengono memorizzati nella memoria non
volatile (EEPROM).
L'operazione di salvataggio si considera conclusa quando alla lettura del parametro
viene fornito il valore 0.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
368
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
PARfactorySet
Ripristino dell'impostazione di fabbrica
(valori di default)
0
1
R/W
-
0
65535
UINT16
R/W
-
Modbus 1040
0
0
2
UINT16
R/W
per.
-
Modbus 1284
ConF → FCSrStF
0 / No / no: no
1 / Yes / yES: sì
Indirizzo parametro con bus di
campo
Reset di tutti i parametri ai valori di default e
memorizzazione nella EEPROM.
Il reset alle impostazioni di fabbrica può
essere attivato dall'HMI o dal software di
messa in servizio.
L'operazione di salvataggio si considera conclusa quando alla lettura del parametro
viene fornito il valore 0.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
PARuserReset
Ripristino dei parametri utente
ConF → FCS-
0 / No / no: no
65535 / Yes / yES: sì
rESu
Bit 0: reset ai valori di default dei parametri
utente e di anello di controllo persistenti.
Bit 1 ... 15: riservati
Vengono ripristinati tutti i parametri tranne:
- parametri di comunicazione
- inversione del senso di movimento
- selezione del segnale per l'interfaccia di
posizione PTI
- modo operativo fissato
- impostazioni della simulazione encoder
- funzioni degli i/O digitali
NOTA: le nuove impostazioni non vengono
memorizzate nella EEPROM.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
PTI_signal_type Selezione del tipo di segnale per l'interfaccia
PTI (197)
ConF → i-o0 / A/B Signals / Ab: segnali ENC_A e
ioPi
ENC_B (valutazione quadrupla)
1 / P/D Signals / Pd: segnali PULSE e DIR
2 / CW/CCW Signals / cWcc: segnali CW e
CCW
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
Servoamplificatore AC
369
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
PTO_mode
Modo d'uso dell'interfaccia PTO (217)
0
1
3
UINT16
R/W
per.
-
Modbus 1342
0
0
1
UINT16
R/W
per.
-
Modbus 1624
UINT32
R/W
per.
-
Modbus 1620
0 / Off: interfaccia PTO disattivata
1 / Esim pAct Enc 1: simulazione encoder
in base alla posizione effettiva dell'encoder 1
2 / Esim pRef: simulazione encoder in base
al valore di consegna di posizione (_p_ref)
3 / PTI Signal: direttamente il segnale
dall'interfaccia PTI
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RAMP_tq_enable
Attivazione del profilo di movimento per la
coppia (209)
0 / Profile Off: profilo disattivato
1 / Profile On: profilo attivato
Il profilo di movimento può essere attivato o
disattivato nel modo operativo Profile Torque.
In tutti gli altri modi operativi il profilo di movimento per la coppia è disattivato.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
RAMP_tq_slope
%/s
0.1
10000.0
100,0% corrisponde alla coppia continuativa 3000000.0
di stallo _M_M_0.
Incremento del profilo di movimento per la
coppia (209)
In passi di 0,1%
Le impostazioni modificate vengono acquisite immediatamente.
Accelerazione del profilo di movimento per la usr_a
velocità (263)
1
600
Le impostazioni modificate vengono acqui- 2147483647
site con lo movimento motore successivo.
UINT32
R/W
per.
-
Modbus 1556
RAMP_v_dec
Decelerazione del profilo di movimento per
la velocità (263)
usr_a
1
600
2147483647
UINT32
R/W
per.
-
Modbus 1558
Utilizzo nei modi operativi Profile Velocity e
Profile Position.
Nel modo operativo Profile Position il valore
minimo è limitato automaticamente a 120
min-1/s.
0198441113763, V1.02, 12.2009
RAMP_v_acc
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
370
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
RAMP_v_enable
Attivazione del profilo di movimento per la
velocità (263)
0
0
1
UINT16
R/W
per.
-
Modbus 1622
ms
0
0
128
UINT16
R/W
per.
-
Modbus 1562
0 / Profile Off: profilo disattivato
1 / Profile On: profilo attivato
Il profilo di movimento per la velocità può
essere attivato o disattivato nei modi operativi Profile Velocity ed Electronic Gear (sincronizzazione di velocità).
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
RAMP_v_jerk
ConF → drCJEr
Limitazione strappi del profilo di movimento
per la velocità (264)
0 / Off / oFF: disattivata
1/1/
1: 1 ms
2/2/
2: 2 ms
4/4/
4: 4 ms
8/8/
8: 8 ms
16 / 16 / 16: 16 ms
32 / 32 / 32: 32 ms
64 / 64 / 64: 64 ms
128 / 128 / 128: 128 ms
Limita la variazione (brusca) di velocità della
generazione del riferimento di posizione nei
passaggi:
- inattività - accelerazione
- accelerazione - movimento costante
- movimento costante - decelerazione
- decelerazione - inattività
Elaborazione nei seguenti modi operativi:
- Profile Position
- Jog
- Homing
- Motion Sequence (Profile Position e
Homing)
L'impostazione è possibile solo quando il
modo operativo non è attivo (x_end=1).
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Servoamplificatore AC
371
11 Parametri
LXM32C
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
RAMP_v_max
Velocità massima del profilo di movimento
per la velocità (263)
usr_v
1
13200
2147483647
UINT32
R/W
per.
-
Modbus 1554
-
UINT32
R/W
-
Modbus 1540
UINT32
R/W
per.
-
Modbus 1572
UINT16
R/W
per.
-
Modbus 1316
ConF → ACGnrMP
Il parametro ha effetto nei seguenti modi
operativi:
- Profile Position
- Profile Velocity (profilo di velocità)
- Homing
- Jog
- Electronic Gear (sincronizzazione di velocità)
Se in uno di questi modi operativi si imposta
una velocità nominale superiore, essa viene
limitato automaticamente al valore di
RAMP_v_max.
Ciò consente di eseguire più facilmente una
messa in servizio a velocità limitata.
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
RAMPaccdec
Accelerazione e decelerazione per il profilo
del comando Drive Profile Lexium
High-Word: accelerazione
Low-Word: decelerazione
I valori vengono moltiplicati internamente per
10 (esempio: 1 = 10 min-1/s).
L'accesso in scrittura modifica i valori di
RAMP_v_acc e RAMP_v_dec. Il controllo
del valore limite avviene sulla base di valori
limite impostati per questi parametri.
Se il valore non può essere rappresentato
come valore a 16 bit, il valore viene impostato su 65535 (massimo valore UINT16).
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
RAMPquickstop
usr_a
200
6000
Rampa di decelerazione per un arresto sof- 2147483647
tware o un errore della classe di errore 1 o 2.
Rampa di decelerazione per
QuickStop (267)
RESext_P
ConF → ACGPobr
Potenza nominale della resistenza di frenatura esterna (153)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
W
1
10
32767
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite con lo movimento motore successivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
372
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
RESext_R
Valore di resistenza della resistenza di frena- Ω
tura esterna (153)
100.00
Il valore minimo dipende dallo stadio finale. 327.67
In passi di 0,01 Ω.
ConF → ACGrbr
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
UINT16
R/W
per.
-
Modbus 1318
UINT16
R/W
per.
-
Modbus 1314
UINT16
R/W
per.
-
Modbus 1298
INT32
R/W
per.
-
Modbus 1550
INT32
R/W
per.
-
Modbus 1552
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RESext_ton
ConF → ACGtbr
Tempo di inserzione max. ammesso della
resistenza di frenatura esterna (153)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ms
1
1
30000
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
RESint_ext
ConF → ACGEibr
Scelta della resistenza di frenatura interna o 0
esterna (153)
0
0 / Internal Braking Resistor / int: resi- 1
stenza di frenatura interna
1 / External Braking Resistor / Eht: resistenza di frenatura esterna
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite con l'attivazione successiva dello stadio
finale.
ScalePOSdenom
usr_p
1
Per la descrizione vedere Numeratore (Sca- 16384
lePOSnum)
2147483647
Scalatura posizione: Denominatore (220)
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ScalePOSnum
Numeratore della scalatura posizione (220)
Indicazione del fattore di scalatura:
0198441113763, V1.02, 12.2009
Giri del motore
------------------------------------------Unità utente [usr_p]
Giro
1
1
2147483647
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
373
11 Parametri
LXM32C
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
INT32
R/W
per.
-
Modbus 1632
min-1/s
1
1
2147483647
INT32
R/W
per.
-
Modbus 1634
Denominatore della scalatura velocità (221) usr_v
1
Per la descrizione vedere Numeratore (Sca- 1
leVELnum)
2147483647
INT32
R/W
per.
-
Modbus 1602
INT32
R/W
per.
-
Modbus 1604
Nome parametro
Menu HMI
Nome HMI
Descrizione
ScaleRAMPdenom
Denominatore della scalatura rampa (222)
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
usr_a
1
Per la descrizione vedere Numeratore (Sca- 1
leRAMPnum)
2147483647
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ScaleRAMPnum
Numeratore della scalatura rampa (222)
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
Le impostazioni modificate vengono acquisite immediatamente.
ScaleVELdenom
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
ScaleVELnum
Numeratore della scalatura velocità (221)
Indicazione del fattore di scalatura:
Numero di giri motore [min-1]
-------------------------------------------------Unità utente [usr_v]
min-1
1
1
2147483647
L'acquisizione di una nuova scalatura ha
luogo con la trasmissione del valore relativo
al numeratore
L'impostazione può essere modificata soltanto se lo stadio finale non è attivo.
0198441113763, V1.02, 12.2009
Le impostazioni modificate vengono acquisite immediatamente.
374
Servoamplificatore AC
LXM32C
11 Parametri
Nome parametro
Menu HMI
Nome HMI
Descrizione
Unità
Valore minimo
Impostazione di
fabbrica
valore massimo
Tipo dati
R/W
Persistente
Esperti
Indirizzo parametro con bus di
campo
ShiftEncWorkRang
Movimento della corsa utile
dell'encoder (151)
0
0
1
UINT16
R/W
per.
-
Modbus 1346
0
0
1
UINT16
R/W
per.
-
Modbus 1350
0 / Off: movimento off
1 / On: movimento on
valore 0:
i valori di posizione si trovano tra 0 ... 4096
rotazioni.
valore 1:
i valori di posizione si trovano tra -2048 ...
2048 rotazioni.
Dopo aver attivato la funzione di movimento,
la corsa utile dell'encoder viene spostata di
metà della fascia.
Esempio per la corsa utile di un encoder
Multiturn con 4096 rotazioni.
Le impostazioni modificate vengono acquisite con l'inserimento successivo del prodotto.
SimAbsolutePos
ConF → ACGqAbS
Simulazione della posizione assoluta
durante il disinserimento/inserimento
0 / Simulation Off / oFF: dopo il disinserimento/inserimento, non utilizzare l'ultima
posizione meccanica
1 / Simulation On / on: dopo il disinserimento/inserimento, utilizzare l'ultima posizione meccanica
Questo parametro determina come devono
essere trattati i valori di posizione dopo il
disinserimento e inserimento, permettendo
la simulazione di un encoder assoluto se
viene utilizzato un encoder Singleturn.
Quando questa funzione è attiva, prima di
disinserirsi l'apparecchio memorizza tutti i
principali dati di posizione e, quando viene di
nuovo inserito, ripristina la posizione meccanica.
0198441113763, V1.02, 12.2009
Con encoder Singleturn, la posizione può
essere ripristinata se l'albero motore non è
stato ruotato per più di 1/4 di giro mentre
l'azionamento era disinserito.
Con encoder Multiturn, il movimento
ammesso dell'albero motore è nettamente
maggiore e dipende dal tipo di encoder Multiturn.
Questa funzione lavora correttamente solo
se l'azionamento viene disinserito quando il
motore è inattivo e se l'albero motore non
viene ruotato oltre la tolleranza ammessa
(per esempio utilizzo del freno).
Le impostazioni modificate vengono acquisite immediatamente.
Servoamplificatore AC
375
LXM32C
0198441113763, V1.02, 12.2009
11 Parametri
376
Servoamplificatore AC
LXM32C
12
Accessori e parti di ricambio
12.1
Strumenti per la messa in servizio
12 Accessori e parti di ricambio
12
Descrizione
Cod. ord.
Software di messa in servizio Lexium CT
download da: www.schneider-electric-motion.com
-
Kit di connessione PC, connessione seriale tra azionamento e PC, USB-A su RJ45
TCSMCNAM3M002P
Multiloader, per trasferire le impostazioni dei parametri su di un PC o su di un altro azionamento VW3A8121
Cavo Modbus, 1 m, 2 x RJ45
12.2
Schede di memoria
Descrizione
Cod. ord.
Memory card per copiare le impostazioni dei parametri
VW3M8705
25 schede di memoria per copiare le impostazioni dei parametri
VW3M8704
12.3
Targhetta di applicazione
Descrizione
Cod. ord.
Targhette di identificazione da applicare sul lato superiore dell'azionamento, dimensioni
38,5 mm x 13 mm per etichette di dimensioni 1,5 inch x 0,5 inch, 50 pz.
VW3M2501
12.4
Cavi adattatori per segnali encoder LXM05/LXM15 su LXM32
Descrizione
Cod. ord.
Adattatore encoder di Molex 10 poli (LXM05) su RJ45 10 poli (LXM32), 1 m
VW3M8111R10
Adattatore encoder di D15-SUB (LXM15) su RJ45 10 poli (LXM32), 1 m
VW3M8112R10
12.5
0198441113763, V1.02, 12.2009
VW3A8306R10
Cavi per PTO e PTI
Descrizione
Cod. ord.
Cavo segnale 2 RJ45, PTO su PTI, 0,3 m
VW3M8502R03
Cavo segnale 2 RJ45, PTO su PTI, 1,5 m
VW3M8502R15
Cavo segnale 1 RJ45, altra estremità del cavo libera, idoneo per la connessione di PTI nel
armadio elettrico, 3 m
VW3M8223R30
Servoamplificatore AC
377
12 Accessori e parti di ricambio
12.6
LXM32C
Cavi motore
12.6.1 Cavo motore 1,5 mm2
Per BMH070, BMH100 (flangia 70 mme 100 mm).
Descrizione
Cod. ord.
2
2
Cavo motore 1,5 m, [(4 x 1,5 mm ) + (2 x 1 mm )] schermato; lato motore connettore circolare a VW3M5101R15
8 poli M23, altra estremità del cavo libera
Cavo motore 3 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5101R30
poli M23, altra estremità del cavo libera
Cavo motore 5 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5101R50
poli M23, altra estremità del cavo libera
Cavo motore 10 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R100
8 poli M23, altra estremità del cavo libera
Cavo motore 15 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R150
8 poli M23, altra estremità del cavo libera
Cavo motore 20 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R200
8 poli M23, altra estremità del cavo libera
Cavo motore 25 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R250
8 poli M23, altra estremità del cavo libera
Cavo motore 50 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R500
8 poli M23, altra estremità del cavo libera
Cavo motore 75 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5101R750
8 poli M23, altra estremità del cavo libera
VW3M5301R250
Cavo motore 50 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5301R500
Cavo motore 100 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5301R1000
378
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Cavo motore 25 m, [(4 x 1,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
LXM32C
12 Accessori e parti di ricambio
12.6.2 Cavo motore 2,5 mm2
Per BMH140, (flangia 140 mm).
Descrizione
Cod. ord.
2
2
Cavo motore 1,5 m, [(4 x 2,5 mm ) + (2 x 1 mm )] schermato; lato motore connettore circolare a VW3M5102R15
8 poli M23, altra estremità del cavo libera
Cavo motore 3 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5102R30
poli M23, altra estremità del cavo libera
Cavo motore 5 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5102R50
poli M23, altra estremità del cavo libera
Cavo motore 10 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R100
8 poli M23, altra estremità del cavo libera
Cavo motore 15 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R150
8 poli M23, altra estremità del cavo libera
Cavo motore 20 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R200
8 poli M23, altra estremità del cavo libera
Cavo motore 25 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R250
8 poli M23, altra estremità del cavo libera
Cavo motore 50 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R500
8 poli M23, altra estremità del cavo libera
Cavo motore 75 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a VW3M5102R750
8 poli M23, altra estremità del cavo libera
VW3M5302R250
Cavo motore 50 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5302R500
Cavo motore 100 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5302R1000
0198441113763, V1.02, 12.2009
Cavo motore 25 m, [(4 x 2,5 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
Servoamplificatore AC
379
12 Accessori e parti di ricambio
LXM32C
12.6.3 Cavo motore 4 mm2
Per BMH205, (flangia 205 mm)
Descrizione
Cod. ord.
2
2
Cavo motore 3 m, [(4 x 4 mm ) + (2 x 1 mm )] schermato; lato motore connettore circolare a 8
poli M40, altra estremità del cavo libera
VW3M5103R30
Cavo motore 5 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8
poli M40, altra estremità del cavo libera
VW3M5103R50
Cavo motore 10 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R100
poli M40, altra estremità del cavo libera
Cavo motore 15 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R150
poli M40, altra estremità del cavo libera
Cavo motore 20 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R200
poli M40, altra estremità del cavo libera
Cavo motore 25 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R250
poli M40, altra estremità del cavo libera
Cavo motore 50 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R500
poli M40, altra estremità del cavo libera
Cavo motore 75 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; lato motore connettore circolare a 8 VW3M5103R750
poli M40, altra estremità del cavo libera
VW3M5303R250
Cavo motore 50 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5303R500
Cavo motore 100 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
VW3M5303R1000
380
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Cavo motore 25 m, [(4 x 4 mm2) + (2 x 1 mm2)] schermato; entrambe le estremità del cavo
libere
LXM32C
12.7
12 Accessori e parti di ricambio
Cavo encoder
Per motori BMH:
Descrizione
Cod. ord.
2
2
Cavo encoder 1,5 m, [3 x (2 x 0,14 mm ) + (2 x 0,34 mm )] schermato; lato motore connettore VW3M8102R15
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
Cavo encoder 3 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore cir- VW3M8102R30
colare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
Cavo encoder 5 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore cir- VW3M8102R50
colare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
Cavo encoder 10 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R100
Cavo encoder 15 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R150
Cavo encoder 20 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R200
Cavo encoder 25 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R250
Cavo encoder 50 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R500
Cavo encoder 75 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; lato motore connettore
circolare a 12 poli M23, lato apparecchio connettore a 10 poli RJ45
VW3M8102R750
Cavo encoder 25 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; entrambe le estremità del VW3M8222R25
cavo libere
Cavo encoder 50 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; entrambe le estremità del VW3M8222R500
cavo libere
Cavo encoder 100 m, [3 x (2 x 0,14 mm2) + (2 x 0,34 mm2)] schermato; entrambe le estremità
del cavo libere
VW3M8222R1000
Connettore D9-SUB (maschio), per modulo encoder resolver
AEOCON011
2
2
Cavo encoder 100 m, [5*(2*0,25 mm )] e [1*(2*0,5 mm )] schermato, entrambe le estremità del VW3M8221R1000
cavo libere
VW3M4701
Cavo encoder 5 m, schermato; HD15 D-SUB (maschio); altra estremità del cavo libera
VW3M4705
0198441113763, V1.02, 12.2009
Cavo encoder 1 m, schermato; HD15 D-SUB (maschio); altra estremità del cavo libera
Servoamplificatore AC
381
12 Accessori e parti di ricambio
12.8
LXM32C
Connettore
Descrizione
Cod. ord.
Connettore encoder M23 (lato cavo) per motore, 5 unità
VW3M8214
Connettore encoder RJ45 (10 pin) (lato cavo) per azionamento, 5 unità
VW3M2208
mm2
VW3M8215
Connettore motore (lato cavo) M40, 4 mm , 5 unità
VW3M8217
Connettore motore (lato cavo) M23, 1,5 ... 2,5
, 5 unità
2
Attrezzi
12.9
Gli utensili necessari per il montaggio possono essere acquistati direttamente dal produttore.
•
Pinza a crimpare per connettore encoder M23:
Coninvers SF-Z0007 www.coninvers.com
•
Attrezzi a crimpare per connettore encoder RJ45 10pins:
Yamaichi Y-ConTool-11, Y-ConTool-20, Y-ConTool-30
www.yamaichi.com
•
Pinza a crimpare per spina di potenza M23/M40:
Coninvers SF-Z0008 www.coninvers.com
Resistenze di frenatura esterne
Descrizione
Cod. ord.
Resistenza di frenatura IP65; 10 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7601R07
sione da 0,75 m, UL
Resistenza di frenatura IP65; 10 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7601R20
sione da 2 m, UL
Resistenza di frenatura IP65; 10 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7601R30
sione da 3 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7602R07
sione da 0,75 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7602R20
sione da 2 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7602R30
sione da 3 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7603R07
sione da 0,75 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7603R20
sione da 2 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7603R30
sione da 3 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7604R20
sione da 2 m, UL
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7604R30
sione da 3 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7605R07
sione da 0,75 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7605R20
sione da 2 m, UL
382
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Resistenza di frenatura IP65; 27 Ω; potenza continua massima 400 W; cavo di cavo di connes- VW3A7604R07
sione da 0,75 m, UL
LXM32C
12 Accessori e parti di ricambio
Descrizione
Cod. ord.
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 100 W; cavo di cavo di connes- VW3A7605R30
sione da 3 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7606R07
sione da 0,75 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7606R20
sione da 2 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 200 W; cavo di cavo di connes- VW3A7606R30
sione da 3 m, UL
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 400 W; cavo di connessione da VW3A7607R07
0,75 m
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 400 W; cavo di connessione da VW3A7607R20
2m
Resistenza di frenatura IP65; 72 Ω; potenza continua massima 400 W; cavo di connessione da VW3A7607R30
3m
Resistenza di frenatura IP65; 100 Ω; potenza continua massima 100 W; cavo di connessione da VW3A7608R07
0,75 m
Resistenza di frenatura IP65; 100 Ω; potenza continua massima 100 W; cavo di connessione da VW3A7608R20
2m
Resistenza di frenatura IP65; 100 Ω; potenza continua massima 100 W; cavo di connessione da VW3A7608R30
3m
Resistenza di frenatura IP65; 15 Ω; potenza continua massima 1000 W; morsetti di collegamento, UL
VW3A7704
Resistenza di frenatura IP65; 10 Ω; potenza continua massima 1000 W; morsetti di collegamento, UL
VW3A7705
12.10 Accessori per bus DC
Descrizione
Cod. ord.
Cavo di connessione bus DC LXM32 su LXM32, premontato, 0,1 m, 5 pz.
VW3M7101R01
Serie di spine bus DC, corpo del connettore e contatti, 10 pz.
VW3M2207
12.11 Induttanze di rete
Cod. ord.
Induttanza di rete 1~; 50-60Hz; 7A; 5mH; IP00
VZ1L007UM50
Induttanza di rete 1~; 50-60Hz; 18A; 2mH; IP00
VZ1L018UM20
Induttanza di rete 3~; 50-60Hz; 16A; 2mH; IP00
VW3A4553
Induttanza di rete 3~; 50-60Hz; 30A; 1mH; IP00
VW3A4554
0198441113763, V1.02, 12.2009
Descrizione
Servoamplificatore AC
383
12 Accessori e parti di ricambio
LXM32C
12.12 Filtri di rete esterni
Descrizione
Cod. ord.
Filtro di rete 1~; 9A; 115/230 VCA per LXM32
VW3A4420
Filtro di rete 1~; 16A; 115/230 VCA per LXM32
VW3A4421
Filtro di rete 3~; 15A; 230/480 VCA per LXM32
VW3A4422
Filtro di rete 3~; 25A; 230/480 VCA per LXM32
VW3A4423
12.13 Parti di ricambio connettori, ventilatori, piastre di copertura
Cod. ord.
Serie di spine LXM32C: 3 alimentazione stadio finale CA (230/400 Vca), 1 alimentazione di
comando, 3 ingressi/uscite digitali (4 pin), 2 motore (10 A / 24 A), 1 freno d'arresto
VW3M2201
Kit ventilatore 40 mm x 40 mm, custodia in plastica, con cavo di connessione
VW3M2401
Kit ventilatore 60 mm x 60 mm, custodia in plastica, con cavo di connessione
VW3M2402
Kit ventilatore 80 mm x 80 mm, custodia in plastica, con cavo di connessione
VW3M2403
384
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Descrizione
LXM32C
13
13 Assistenza tecnica, manutenzione e smaltimento
Assistenza tecnica, manutenzione e smaltimento
13
Far eseguire le riparazioni esclusivamente dal servizio
assistenza Schneider Electric. Qualsiasi intervento
apportato in prima persona al prodotto solleva il costruttore
da qualsiasi obbligo di garanzia e responsabilità.
13.1
Indirizzi di assistenza tecnica
Se un errore non può essere eliminato, rivolgersi all'ufficio vendite locale. Tenere a portata di mano i seguenti dati:
•
Targhetta (tipo, numero ident., numero di serie, DOM, ...)
•
Tipo d'errore (eventuale codice lampeggiato o codice d'errore)
•
Circostanze precedenti e contemporanee all'errore
•
Sospetti personali in merito alla causa dell'errore
Questi dati devono anche essere allegati al prodotto qualora esso venga
spedito all'Assistenza per controlli o interventi di riparazione.
In caso di richieste e problemi, rivolgersi al rappresentante
locale. Questo sarà lieto di fornire l'indirizzo di un servizio
di assistenza nelle vicinanze.
http://www.schneider-electric.com
13.2
Manutenzione
Controllare con regolarità la presenza di imbrattamento o danneggiamenti del prodotto.
13.2.1 Durata della funzione di sicurezza STO
La funzione di sicurezza STO è stata concepita per una durata di 20
anni. Dopo questo intervallo di tempo i dati della funzione di sicurezza
perdono validità. La data di scadenza è riportata sulla targhetta del prodotto valore DOM + 20 anni.
왘 Registrare questa scadenza nel piano di manutenzione
dell'impianto.
0198441113763, V1.02, 12.2009
Dopo questa scadenza la funzione di sicurezza non deve essere
più utilizzata.
Esempio
Servoamplificatore AC
Sulla targhetta del prodotto, la data DOM è indicata nel formato
DD.MM.YY, p.es. 31.12.08. (31 dicembre 2008). Ciò significa: non utilizzare più la funzione di sicurezza dopo il 31 dicembre 2028.
385
13 Assistenza tecnica, manutenzione e smaltimento
13.3
LXM32C
Sostituzione di apparecchi
@ AVVERTENZA
COMPORTAMENTO IMPREVISTO
Il comportamento del sistema di azionamento è determinato da un cospicuo numero di dati memorizzati o di impostazioni. Impostazioni o
dati non idonei possono provocare movimenti o segnali inaspettati e
disattivare funzioni di monitoraggio.
•
NON attivare il sistema di azionamento senza conoscerne le
impostazioni o i dati.
•
Verificare i dati memorizzati e le impostazioni.
•
All'atto della messa in servizio sottoporre a controlli accurati tutti
gli stati di funzionamento e i casi di errore.
•
Verificare le funzioni in caso di sostituzione del prodotto e dopo
ogni variazione delle impostazioni o dei dati.
•
Avviare l'impianto solo se non vi sono persone o ostacoli
all'interno della zona pericolosa.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
Compilare una lista dei parametri necessari per le funzioni
utilizzate.
Per la sostituzione dell'apparecchio attenersi alla procedura di seguito
descritta.
왘 Memorizzare tutte le impostazioni dei parametri dell'apparecchio. A
tal fine utilizzare un memory card, vedere il capitolo 7.7.1 "Scambio
di dati con la memory card" a pagina 174, oppure memorizzare i
dati mediante il software di messa in servizio sul proprio PC, vedere
il capitolo 7.4 "Software di messa in servizio" pagina 132.
왘 Disinserire tutte le tensioni di alimentazione. Accertare la totale
assenza di tensione (istruzioni relative alla sicurezza).
왘 Contrassegnare tutti i connessioni e smontare il prodotto.
왘 Per consentire la futura identificazione del prodotto, prendere nota
del numero di identificazione e del numero di serie riportati sulla targhetta.
왘 Installare il nuovo prodotto conformemente alle indicazioni del capi-
tolo 6 "Installazione"
왘 Se il prodotto da installare era già stato messo in servizio in un altro
왘 Effettuare la messa in servizio come specificato al capitolo 7
"Messa in servizio".
386
Servoamplificatore AC
0198441113763, V1.02, 12.2009
luogo, prima della messa in servizio occorre ripristinare le impostazioni di fabbrica.
LXM32C
13.4
13 Assistenza tecnica, manutenzione e smaltimento
Sostituzione del motore
@ AVVERTENZA
MOVIMENTO INASPETTATO
In caso di errato collegamento o di errori di altro genere, i sistemi di
azionamento possono eseguire movimenti inaspettati.
•
Utilizzare l'apparecchio esclusivamente con motori omologati.
Anche in caso di impiego di motori simili permane un certo livello
di rischio dovuto alla diversa regolazione del sistema encoder.
•
Anche se i connettori per l'allacciamento della potenza risultano
meccanicamente adatti all'encoder, ciò NON significa che possano essere utilizzati.
L'inosservanza di queste precauzioni può provocare incidenti
mortali, lesioni gravi o danni materiali.
왘 Disinserire tutte le tensioni di alimentazione. Accertare la totale
assenza di tensione (istruzioni relative alla sicurezza).
왘 Contrassegnare tutti i connessioni e smontare il prodotto.
왘 Per consentire la futura identificazione del prodotto, prendere nota
del numero di identificazione e del numero di serie riportati sulla targhetta.
왘 Installare il nuovo prodotto conformemente alle indicazioni del capi-
tolo 6 "Installazione"
Se il motore collegato viene sostituito con un altro, il record di dati relativi
al motore viene letto nuovamente. Se l'apparecchio rileva un altro tipo di
motore, i parametri di anello di controllo vengono ricalcolati e sull'HMI
viene visualizzato il messaggio MOT. Per maggiori informazioni vedere il
capitolo 10.3.3 "Conferma della sostituzione del motore" a pagina 293.
In caso di sostituzione occorre reimpostare i parametri dell'encoder, vedere il capitolo 7.5.9 "Impostazione dei parametri per encoder" pagina
148.
Modifica temporanea del tipo di
motore
왘 Se il nuovo tipo di motore deve essere utilizzato solo temporanea-
mente con l'apparecchio, premere il tasto ESC sull'HMI.
컅 I parametri dell'anello di controllo non vengono salvati nella
EEPROM. Il motore originario potrà quindi essere rimesso in servizio con i parametri di anello di controllo memorizzati.
Modifica definitiva del tipo di motore
왘 Se il nuovo tipo di motore deve essere utilizzato definitivamente con
questo apparecchio, premere il pulsante di navigazione sull'HMI.
컅 I parametri dell'anello di controllo ricalcolati vengono salvati nella
EEPROM.
0198441113763, V1.02, 12.2009
Vedere anche il capitolo 10.3.3 "Conferma della sostituzione del motore" a pagina 293.
Servoamplificatore AC
387
13 Assistenza tecnica, manutenzione e smaltimento
13.5
LXM32C
Spedizione, magazzinaggio, smaltimento
Osservare le condizioni ambientali a pagina 21.
Spedizione
Magazzinaggio
L’apparecchio deve essere stoccato esclusivamente nelle condizioni
ambientali ammesse specificate.
Proteggere il prodotto dalla polvere e dalla sporcizia.
Il prodotto è costituito da diversi materiali che possono essere riutilizzati
e vanno pertanto smaltiti separatamente. Smaltire il prodotto nel rispetto
della normativa locale.
0198441113763, V1.02, 12.2009
Smaltimento
Il trasporto del prodotto è ammesso soltanto con adeguate protezioni
contro gli urti. Per la spedizione utilizzare possibilmente la confezione
originale.
388
Servoamplificatore AC
LXM32C
14 Glossario
14
Glossario
14.1
Unità e tabelle di conversione
14
Il valore espresso nell'unità di misura indicata (colonna sinistra) viene
calcolato utilizzando la formula (riportata nella casella) applicata
all'unità di misura richiesta (riga di intestazione).
Esempio: conversione di 5 metri [m] in yard [yd]
5 m / 0,9144 = 5,468 yd
14.1.1 Lunghezza
in
ft
yd
m
cm
mm
in
-
/ 12
/ 36
* 0,0254
* 2,54
* 25,4
ft
* 12
-
/3
* 0,30479
* 30,479
* 304,79
yd
* 36
*3
-
* 0,9144
* 91,44
* 914,4
m
/ 0,0254
/ 0,30479
/ 0,9144
-
* 100
* 1000
cm
/ 2,54
/ 30,479
/ 91,44
/ 100
-
* 10
mm
/ 25,4
/ 304,79
/ 914,4
/ 1000
/ 10
-
14.1.2 Massa
lb
oz
lb
oz
slug
kg
g
-
* 16
* 0,03108095
* 0,4535924
* 453,5924
* 0,02834952
* 28,34952
-
* 14,5939
* 14593,9
/ 16
-
*
-3
1,942559*10-3
slug
/ 0,03108095
/ 1,942559*10
kg
/ 0,45359237
/ 0,02834952
/ 14,5939
-
* 1000
g
/ 453,59237
/ 28,34952
/ 14593,9
/ 1000
-
lb
oz
p
dyne
N
lb
-
* 16
* 453,55358
* 444822,2
* 4,448222
oz
/ 16
-
* 28,349524
* 27801
* 0,27801
p
/ 453,55358
/ 28,349524
-
* 980,7
* 9,807*10-3
dyne
/ 444822,2
/ 27801
/ 980,7
-
/ 100*103
N
/ 4,448222
/ 0,27801
/ 9,807*10-3
* 100*103
-
0198441113763, V1.02, 12.2009
14.1.3 Forza
14.1.4 Potenza
HP
HP
W
-
* 746
Servoamplificatore AC
389
14 Glossario
W
LXM32C
HP
W
/ 746
-
14.1.5 Rotazione
min-1 (RPM)
-1
min (RPM) -
rad/s
deg./s
* π / 30
*6
rad/s
* 30 / π
-
* 57,295
deg./s
/6
/ 57,295
-
14.1.6 Coppia
lb·in
lb·ft
oz·in
Nm
kp·m
kp·cm
dyne·cm
lb·in
-
/ 12
* 16
* 0,112985
* 0,011521
* 1,1521
* 1,129*106
lb·ft
* 12
-
* 192
* 1,355822
* 0,138255
* 13,8255
* 13,558*106
oz·in
/ 16
/ 192
-
* 7,0616*10-3 * 720,07*10-6 * 72,007*10-3 * 70615,5
Nm
/ 0,112985
/ 1,355822
/ 7,0616*10-3 -
* 0,101972
* 10,1972
* 10*106
kp·m
/ 0,011521
/ 0,138255
/ 720,07*10-6 / 0,101972
-
* 100
* 98,066*106
kp·cm
/ 1,1521
/ 13,8255
/ 72,007*10-3 / 10,1972
/ 100
-
* 0,9806*106
dyne·cm
/ 1,129*106
/ 13,558*106
/ 70615,5
/ 98,066*106
/ 0,9806*106
-
/ 10*106
14.1.7 Momento d'inerzia
lb·in2
lb·ft2
kg·m2
kg·cm2
kp·cm·s2
oz·in2
lb·in2
-
/ 144
/ 3417,16
/ 0,341716
/ 335,109
* 16
lb·ft2
* 144
-
* 0,04214
* 421,4
* 0,429711
* 2304
* 10,1972
* 54674
-
/ 980,665
* 5,46
kg·m2
* 3417,16
kg·cm2
kp·cm·s
oz·in2
2
/ 0,04214
-
*
3
10*103
* 0,341716
/ 421,4
/ 10*10
* 335,109
/ 0,429711
/ 10,1972
* 980,665
-
* 5361,74
/ 16
/ 2304
/ 54674
/ 5,46
/ 5361,74
-
°F
°C
K
°F
-
(°F - 32) * 5/9
(°F - 32) * 5/9 + 273,15
°C
°C * 9/5 + 32
-
°C + 273,15
K
(K - 273,15) * 9/5 + 32
K - 273,15
-
14.1.9 Sezione del conduttore
AWG
1
2
3
4
5
6
7
8
9
10
11
12
13
mm2
42,4
33,6
26,7
21,2
16,8
13,3
10,5
8,4
6,6
5,3
4,2
3,3
2,6
AWG
14
15
16
17
18
19
20
21
22
23
24
25
26
mm2
2,1
1,7
1,3
1,0
0,82
0,65
0,52
0,41
0,33
0,26
0,20
0,16
0,13
390
Servoamplificatore AC
0198441113763, V1.02, 12.2009
14.1.8 Temperatura
LXM32C
14.2
14 Glossario
Definizioni e abbreviazioni
L'indicazione delle norme a cui numerose definizioni si richiamano sono
riportate nel capitolo 2.7 "Normative e concetti tecnici". Alcune definizioni e alcuni acronimi possiedono significati specifici a seconda della
norma di riferimento.
AC
Avvertenza
Al di fuori del contesto inerente le istruzioni relative alla sicurezza, per
avvertimento si intende un'avvertenza segnalante un potenziale problema identificato da una funzione di monitoraggio. L'avvertimento non
segnala la presenza di anomalie e pertanto non implica alcuna commutazione dello stato operativo del sistema.
CCW
Counter Clockwise (inglese), senso antiorario.
CEM
Compatibilità elettromagnetica.
CW
Classe di anomalia
DC
Clockwise (inglese), senso orario.
Classificazione delle anomalie in gruppi. La ripartizione in diverse classi
di anomalia consente di attivare reazioni mirate a seconda della classe
di appartenenza dell'anomalia, ad esempio in base alla gravità.
Direct current (inglese), corrente continua.
DOM
(Date of manufacturing). Sulla targhetta è indicata la data di produzione
in formato GG/MM/AA o nel formato DD.MM.AAAA. Esempio:
31.12.09 corrisponde al 31 dicembre 2009
31.12.2009 corrisponde al 31 dicembre 2009
Encoder
Sensore utile per rivelare la posizione angolare di un elemento rotante.
Se è montato all'interno del motore, l'encoder indica la posizione angolare del rotore.
Errore
Discrepanza tra un valore o uno stato riconosciuto (calcolato, misurato
o trasmesso mediante segnale) ed il valore o lo stato previsto o teoricamente corretto.
Errore fatale
Nel caso di un errore fatale il prodotto non è più in grado di comandare
il motore ed è dunque necessario disattivare immediatamente lo stadio
finale.
FI
Interruttore di sicurezza per correnti disperse (RCD Residual current device).
Fattore di scalatura
0198441113763, V1.02, 12.2009
Alternating current (inglese), corrente alternata
Questo fattore indica il rapporto tra un'unità interna e l'unità utente.
Fault
Fault descrive uno stato che può essere richiamato da un errore. Per
maggiori informazioni si rimanda alle norme e agli standard corrispondenti, ad esempio IEC 61800-7, ODVA Common Industrial Protocol
(CIP).
Fault reset
Funzione con cui l'azionamento viene riportato nello stato di funzionamento regolare interrotto a causa dell'errore, nonché dopo l'eliminazione di tale causa e la scomparsa dell'errore.
Freno d'arresto
Il freno d'arresto integrato nel motore ha il compito di bloccare il motore
in assenza di alimentazione anche quando una forza esterna è applicata (ad esempio in caso di asse verticale). Il freno d'arresto non rappresenta un dispositivo di sicurezza.
Servoamplificatore AC
391
14 Glossario
LXM32C
I/U
Impostazione di fabbrica
Impulso di posizione
Inc
Ingressi/Uscite
Impostazioni alla consegna del prodotto.
Segnale di un encoder per la creazione di riferimenti relativi alla posizione del rotore nel motore. L'encoder trasmette un impulso di posizione
a ogni giro.
Incrementi
Interruttore di finecorsa
Interruttori utili per segnalare l'abbandono del campo di movimento consentito.
Monitoraggio I2t
Controllo cautelativo della temperatura. Dalla corrente del motore viene
calcolato a priori il riscaldamento previsto. In caso di superamento del
valore limite, l'azionamento riduce la corrente del motore.
PC
PELV
PLC
Parametri
Persistente
Personal Computer
Protective Extra Low Voltage (inglese), bassa tensione di funzionamento con separazione di protezione. Per maggiori informazioni:
IEC 60364-4-41.
Controllore logico programmabile
Dati e valori relativi all'apparecchio leggibili e parzialmente impostabili
dall'utente.
Indica se il valore del parametro deve essere salvato nella memoria
dopo aver disinserito l'apparecchio.
Posizione effettiva
Posizione corrente del componenti mobili nel sistema di azionamento.
Quick Stop
Stop rapido, la funzione può essere lanciata in caso di errore o con un
istruzione per rallentare rapidamente un movimento.
RS485
Interfaccia bus di campo secondo EIA-485, la quale consente la trasmissione seriale di dati tra diversi utenti.
Rete IT
Rete in cui tutti i componenti attivi sono isolati verso terra o messi a terra
attraverso un'alta impedenza. IT: isolé terre (francese), terra isolata.
Contrario: reti messe a terra, vedere Rete TT/TN
Rete TT, rete TN
Reti collegate a terra che si distinguono tra loro il diverso collegamento
del conduttore di protezione. Contrario: reti non collegate a terra, vedere
rete IT.
Riduttore elettronico
Conversione del numero di giri in ingresso in un nuovo numero di giri in
uscita per il movimento del motore operata dal sistema di azionamento
applicando i valori di un rapporto di trasmissione impostabile.
Segnali di impulso/direzione
Segnali digitali con frequenza di ripetizione impulsi variabile che trasmettono il cambiamento di posizione e la direzione di movimento attraversa cavi di segnale separati.
Senso di rotazione
Rotazione dell'albero motore in senso positivo o negativo. Per rotazione
positiva si intende un movimento dell'albero motore in senso orario osservando la superficie anteriore dell'albero motore estratto.
Sistema di azionamento
Stadio finale
392
Il grado di protezione è una definizione normalizzata utilizzata per gli
strumenti elettrici al fine di descrivere la tipologia di protezione utilizzata
per evitare la penetrazione di corpi estranei e di acqua (esempio: IP20).
Sistema costituito da controllo, stadio finale e motore.
Si tratta dell'elemento con cui viene azionato il motore. In particolare ha
il compito specifico di generare le correnti di controllo del motore in base
ai segnali di posizionamento del controllo.
Servoamplificatore AC
0198441113763, V1.02, 12.2009
Grado di protezione
LXM32C
14 Glossario
Unità interne
Unità utente
Unità che può essere messa in relazione al movimento del motore
dall'utente attraverso relativi parametri.
Valore efficace di una tensione (Vrms) o di una corrente (Arms); abbreviazione di "Root Mean Square".
0198441113763, V1.02, 12.2009
rms
Risoluzione dello stadio finale con cui può essere posizionato il motore.
Le unità interne vengono indicate in incrementi.
Servoamplificatore AC
393
LXM32C
0198441113763, V1.02, 12.2009
14 Glossario
394
Servoamplificatore AC
LXM32C
15
15 Indice
Indice
15
Numerics
24 V alimentazione di controllo 113
A
A/B
0198441113763, V1.02, 12.2009
Schema di collegamento 112
A/B 5V
Schema di collegamento 111
Abbreviazioni 391
Accessori
Induttanza di rete 63
Accessori e parti di ricambio 377
Accessorio
Filtro di rete, esterno 46
Induttanza di rete 47
Resistenza di frenatura esterna, dati 43
Alimentazione ausiliaria
collegamento 115
Alimentazione ausiliaria 24VDC 32
Alimentazione dalla rete
connessione apparecchio monofase 104
connessione apparecchio trifase 105
Alimentazione di controllo
corrente sui morsetti ammessa 114
Dimensionamento 114
Alimentazione di tensione - Esigenze CEM 56
Alimentazione stadio finale
Collegamento 103
connessione apparecchio monofase 104
connessione apparecchio trifase 105
Ambiente
Connessione 22
posizione di montaggio 22
Anomalie
rimozione 287
Apparecchi trifase 400/480 V UL 48
Apparecchio
montaggio 83, 84
Armadio elettrico 83
Assemblaggio dei cavi
fase motore 94
Assistenza tecnica 385
Automa a stato 134
Avvio e cambio di modo operativo 187
B
Bus DC
Collegamento in parallelo 62
Servoamplificatore AC
395
15 Indice
LXM32C
Connessione 99
Cablaggio alimentazione di controllo 113
Cablaggio UL 48
Cambiamenti di stato 184
Cambio dello stato di funzionamento 186
Canali di accesso 179
Categoria di arresto 0 73
Categoria di arresto 1 73
Categoria sovratensione
UL 48
Cavi 58
Cavo encoder
Esigenze CEM 56
Cavo motore
collegamento 96
Esigenze CEM 56
CEM 54
Alimentazione di tensione 56
Cavo motore e cavo encoder 56
Conduttori schermati 55
Miglioramento 56
Posa dei cavi 55
Struttura dell'armadio elettrico 54
Certificato TÜV di sicurezza funzionale 50
Certificazioni 48
Classe di errore 182, 287
Classi di pericolosità 16
Codice tipo 13
Collegamento
fasi del motore 91
Collegamento alla rete di alimentazione 103
Collegamento encoder (motore)Collegamento encoder motore 107
Collegamento in parallelo del bus DC 62
Collegamento PC 120
Componenti e interfacce 12
Condizioni ambientali 21
Conduttori di compensazione del potenziale 58
Connessione
alimentazione dalla rete,apparecchio monofase 104
alimentazione dalla rete,apparecchio trifase 105
alimentazione di controllo 24V 113
Alimentazione stadio finale 102
alimentazione stadio finale apparecchio monofase 104
alimentazione stadio finale apparecchio trifase 105
Ambiente 22
bus DC 99
Encoder motore 106
ESIM 108
Freno d'arresto 97
funzione di sicurezza STO 113
ingressi analogici 116
Ingressi/uscite digitali 118
PC 120
PTO 108
Pulse Train Out 108
396
Servoamplificatore AC
0198441113763, V1.02, 12.2009
C
LXM32C
15 Indice
Resistenza di frenatura esterna 99
Simulazione encoder 108
STO 113
Controllo del freno d'arresto 146
Controllo della direzione di movimento 147
Controllo della funzione di sicurezza STO 143
CW/CCW 40
Schema di collegamento 112
CW/CCW 5V
Schema di collegamento 111
D
Dati tecnici 21
Definitione
Safe Torque Off 73
Definizione
STO 73
Definizioni 391
Destinazione del collegamento 24V
A/B 112
CW/CCW 112
PTI 112
Pulse Train In 112
PULSE/DIR 112
Destinazione del collegamento 5V
A/B 111
CW/CCW 111
PTI 111
Pulse Train In 111
PULSE/DIR 111
Determinazione dei valori del regolatore
valori del regolatore con meccanica rigida 164
Diagnosi 287
Diagramma
Segnali A/B 39
Segnali CW/CCW 40
Segnali P/D 38
Diagramma di stato 181
Dichiarazione di conformità 49
Dimensionamento
alimentazione di controllo 114
Dimensionamento della resistenza di frenatura 66
Distanze di montaggio 83
E
0198441113763, V1.02, 12.2009
Electronic Gear 194
Encoder motore
Collegamento 106
funzione 106
tipo encoder 106
EPLAN macros 9
Esecuzione dell'Autotuning 154
Esempi 283
ESIM
Connessione 108
Servoamplificatore AC
397
15 Indice
LXM32C
F
Fault Reset 183
Filtri di rete 64
Filtro di grandezza pilota 164
Filtro di rete
Esterno 46
interno 45
Filtro di rete esterno 46
Montaggio 85
Filtro di rete interno 45
Fondamenti 51
Fonte di reperimento
EPLAN macros 9
Freno d'arresto 144
Connessione 97
Funzionamento 177
Funzione
segnali A/B 39
Segnali CW/CCW 40
Segnali P/D 38
Funzione di sicurezza 73
Categoria di arresto 0 73
Categoria di arresto 1 73
Definizione 73
Definizioni 73
Esempi di applicazione 76
Requisiti 74
Funzione di sicurezza STO
Collegamento 115
Funzioni di monitoraggio 79
Fusibili UL 48
G
Glossario 389
Grado d'inquinamento 22
Grado d'inquinamento per UL 48
Grado di protezione 22
Grado di protezione IP 22
H
HMI
Set di caratteri 129
Impostazione dei parametri per encoder 148
Impostazione dei parametri per la resistenza di frenatura 152
Impostazioni avanzate per l'Autotuning 157
Impulso/Direzione 38
Impulso/direzione P/D 5V
Schema di collegamento 111
Indirizzi di assistenza tecnica 385
Induttanza di rete 47, 63
Montaggio
Montaggio
Induttanza di rete 85
Ingressi analogici
398
Servoamplificatore AC
0198441113763, V1.02, 12.2009
I
LXM32C
15 Indice
Collegamento 117
Connessione 116
Specifiche dei cavi 116
Ingressi e uscite digitali
Visualizzazione e modifica 141
Ingressi segnale
schema circuito 36
Ingressi/uscite digitali
Collegamento 119
Inserimento dell'apparecchio 133
Installazione 81
elettrica 87
meccanica 82
Installazione elettrica 87
Installazione meccanica 82
Introduzione 11
J
Jog 188
L
Lancio della funzione gradino 160
Letteratura di riferimento 10
Limitazione strappi 264
Limitazioni
Ingressi analogici 117
M
0198441113763, V1.02, 12.2009
Magazzinaggio 388
Makros EPLAN 9
Manuali
reperibilità 9
Manutenzione 385
Meccanica, progetto del sistema di regolazione 163
Messa in servizio 123
Controllo del freno d'arresto 146
Controllo della direzione di movimento 147
Controllo della funzione di sicurezza STO 143
Esecuzione dell'Autotuning 154
fasi operative 133
impostazione dei parametri fondamentali 135
Impostazione dei parametri per encoder 148
Impostazione dei parametri per la resistenza di frenatura 152
Impostazioni avanzate per l'Autotuning 157
impostazioni preliminari e ottimizzazione 168
Ingressi e uscite digitali 141
ottimizzazione del controllore 159
Ottimizzazione del regolatore di velocità 161
Prova degli ingressi analogici 139
struttura del regolatore 159
Messa in servizio con software 132
Misure per migliorare la CEM 56
Modi operativi 187
Avvio e cambio di modo operativo 187
Modo operativo
Electronic Gear 194
Servoamplificatore AC
399
15 Indice
LXM32C
Jog 188
Profile Torque 203
Profile Velocity 210
Modulo analogico
Ingresso analogico 139
Monitoraggi
fasi motore 95
Resistenza di frenatura 68
Montaggio
Filtro di rete esterno 85
meccanico 83
Resistenza di frenatura esterna 86
Montaggio del filtro di rete esterno 85
Montaggio dell'induttanza di rete 85
Montaggio della resistenza di frenatura 85
Motori ammessi 26
O
Ottimizzazione del controllore 159
Ottimizzazione delle impostazioni preliminari 168
P
Schema di collegamento 112
Panoramica dell'apparecchio 11
Panoramica generale
connessioni 89
Modalità di esecuzione dell'installazione elettrica 88
Panoramica generale delle connessioni 89
Parametri 311
descrizione 311
PC
Connessione 120
Posa dei cavi - Esigenze CEM 55
Posa protetta 75
Posizione di montaggio 22
Prima della messa in funzione
informazioni sulla sicurezza 15
Primo inserimento
Operazioni preliminari 133
Profile Torque 203
Profile Velocity 210
Prospetto generale 126
Prova degli ingressi analogici 139
PT_in 5V
Schema di collegamento
PulseTrain 5V
Schema di collegamento 111
PTI
Schema di collegamento
PulseTrain
Schema di collegamento 112
PTO
Connessione 108
Pulse Train In
collegamento 24 V 113
400
Servoamplificatore AC
0198441113763, V1.02, 12.2009
P/D
LXM32C
15 Indice
collegamento 5 V 111
Destinazione del collegamento 24V 112
destinazione del collegamento 5V 111
Pulse Train Out
Connessione 108
Punto centrale di terra 90
Q
Qualifiche richieste per il personale 15
R
Reazione ad errore 182
Significato 182, 287
Record di dati relativi al motore
importazione automatica 133
Regolatore
Inserimento dei valori 160
struttura 159
Regolatore di corrente
Funzione 159, 236
Regolatore di giri, vedere Regolatore di velocità
Regolatore di posizione
Funzione 160, 236
ottimizzazione 169
Regolatore di velocità
Funzione 160, 236
Impostazione 161
Reperibilità dei manuali 9
Reset di un messaggio d'errore 183
Resistenza di frenatura 42
Dimensionamento 66
esterna 43
Scelta 68
Resistenza di frenatura esterna
Collegamento 99
collegamento 101
Montaggio 86
Specifiche dei cavi 100
Resistenze di frenatura esterne 43
Rete IT, esercizio in 61
S
0198441113763, V1.02, 12.2009
Safe Torque Off 73
Definizione 73
Schema di collegamento
Alimentazione 24 V 115
Alimentazione di controllo 115
Encoder motore 107
ESIM 108
freno d'arresto 98
Ingressi analogici 117
Ingressi/uscite digitali 118
PC 120
PTO 108
Pulse Train Out 108
resistenza di frenatura esterna 101
Servoamplificatore AC
401
15 Indice
LXM32C
402
0198441113763, V1.02, 12.2009
terminale grafico 120
Schema di collegamento 24 V
A/B 112
CW/CCW 112
PT_in 112
Pulse Train 112
PULSE/DIR 112
Schema di collegamento 5V
Pulse Train, PT_in 111
PULSE/DIR, A/B 111
Schema di collegamento, CW/CCW 111
Schermo - Esigenze CEM 55
Segnalazione degli stati di funzionamento 185
Segnale di guida
Impostazione 160
Segnali
A/B 39
CW/CWW 40
Impulso/Direzione 38
Senso di rotazione ->Direzione di movimento 147
Set di caratteri
HMI 129
Sicurezza funzionale 19, 41, 51
Simulazione encoder
Connessione 108
Smaltimento 385, 388
Software di messa in servizio 132
Guida in linea 132
Impostazione del segnale di guida 160
Lancio della funzione gradino 160
Sostituzione del motore 387
Specifiche dei cavi
collegamento del motore 92
Encoder motore 106
Ingressi analogici 116
PC 120
Posa protetta 75
PTI 110
Pulse Train In 110
Resistenza di frenatura esterna 100
Terminale grafico 120
Specifiche relative ai cavi
Segnali digitali 118
Spedizione 388
Stati di funzionamento 181
Cambio dello stato di funzionamento 186
Diagramma di stato 181
Segnalazione degli stati di funzionamento 185
Stato di funzionamento 134
STO 73
Collegamento 115
connessione 113
Definizione 73
Definizioni 73
Esempi di applicazione 76
Requisiti 74
Struttura dell'armadio elettrico - Esigenze CEM 54
Servoamplificatore AC
LXM32C
15 Indice
Sussidio di dimensionamento
Resistenza di frenatura 69
T
Temperatura ambiente UL 48
U
UL
Apparecchi trifase 400/480 V 48
cablaggio 48
Categoria sovratensione 48
Fusibili 48
Temperatura ambiente 48
Unità e tabelle di conversione 389
Uso conforme allo scopo di destinazione 15
V
0198441113763, V1.02, 12.2009
Valori di consegna
Ingressi analogici 117
Valori limite
Impostazione 136
Ventilazione 83
Vite di messa a terra
Connessione
Vite di messa a terra 90
Servoamplificatore AC
403
LXM32C
0198441113763, V1.02, 12.2009
15 Indice
404
Servoamplificatore AC
© Copyright 2026 Paperzz