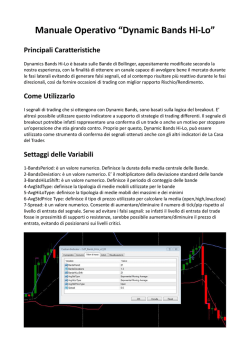
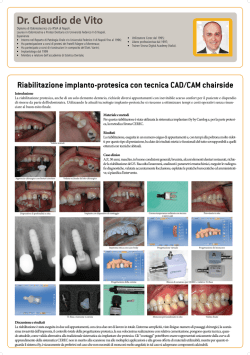
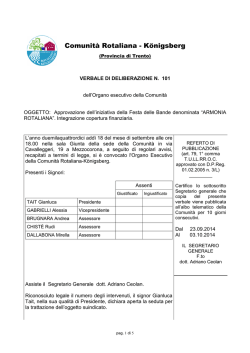
IL MONITORAGGIO DELLE PRATERIE DI POSIDONIA IN AMBIENTI SCARSAMENTE ANTROPIZZATI ED INTEGRALMENTE TUTELATI: L’ISOLA DI PIANOSA Aurelio Caligiore1, Federica Galeano1, Andrea Masini3, Pio Puri2, Vincenzo Ventra1. 1 Reparto Ambientale Marino del Corpo delle Capitanerie di Porto - Tel: 06/57225639, Fax. 06/57225679 e-mail: [email protected] 2 Collaboratore esterno – Reparto Ambientale Marino del Corpo delle Capitanerie di Porto e-mail: [email protected] 3 Flyby s.r.l. e-mail: [email protected] Riassunto – La prateria di Posidonia oceanica costituisce un habitat marino mediterraneo di grande importanza dal punto di vista ecologico. La presenza della Posidonia lungo le coste insulari e peninsulari contribuisce tra l’altro ad attenuare i fenomeni erosivi, sia grazie alla estensione delle foglie le quali attenuano l’impatto del moto ondoso verso riva, creando una vera e propria barriera naturale, sia per la formazione di accumuli di foglie morte a riva, le cosiddette “banquette”. La valenza ecologica delle praterie di Posidonia consiste nella loro capacità di offrire “risorse” (substrato, nutrimento, riparo etc…) ad una moltitudine di organismi marini realizzando un ambiente ad elevata biodiversità. Per tali caratteristiche la presenza della prateria di Posidonia è considerata un buon indicatore dell’equilibrio dell’ecosistema marino. Lo studio proposto ha come oggetto la mappatura ed il monitoraggio della prateria presente sui fondali dell’Isola di Pianosa, nel Parco Nazionale dell’Arcipelago Toscano. L’isola di Pianosa è riserva integrale, ai sensi del D.P.R. del 22 luglio 1996 e del Decreto del Ministero dell'Ambiente del 19.12.1997 che ha esteso tale livello di protezione anche al miglio di mare circostante l'Isola stessa. Con il presente lavoro si propone una metodologia relativamente poco onerosa e molto meno invasiva rispetto ai campionamenti in situ di tipo tradizionale, finalizzata ad aggiornare l’esistente mappatura e monitorare l’andamento delle praterie presenti. Abstract – Posidonia oceanica represents an important food source for several species, offers refuge for benthic communities and is a nursery area for commercial fish juveniles. Moreover, meadows contribute to the prevention of erosion, mitigating the wave action on the sea bottom by their leafs and on the shoreline by the “banquettes”. For these properties, the presence of P. oceanica is considered as a good indicator of the ecological status of marine ecosystem. The present study is carried out in Pianosa Island in the Tuscan Archipelago National Park. This island is protected in accordance to the Presidential Decree 22/07/1996 and to the Decree of the Ministry of the Environment 19/12/1997, which has extended the conservation of the island waters to 1 NM from the coastline. The study focuses on charting and monitoring of the meadows by a not expensive method which is less invasive than the usual sampling techniques. 1 Introduzione Oggigiorno tra i vari indicatori impiegati per la valutazione ed il monitoraggio della qualità delle acque marino-costiere, lagunari e di estuario, spicca quello legato alla densità delle praterie di fanerogame marine poiché, come noto, oltre a consentire un’intrinseca biodiversità fungono da “nursery” per un gran numero di specie di pesci, molluschi e crostacei d’interesse biologico oltre che commerciale. Data la spiccata sensibilità delle praterie ai diversi eventi stressogeni si può considerare la variazione dell’area colonizzata, di per se, un parametro utile a valutare lo stato ecologico di un bacino o di un tratto di costa purché detta variazione passi attraverso il vaglio del monitoraggio e del confronto con i dati spazio-temporali (Pergent et al., 1995). Stante l’ultima mappatura delle praterie delle coste e isole toscane risalente agli anni ’90 (Cinelli et al., 1995; Bedini et al., 2000; Piazzi et al., 2000) ed in considerazione delle strumentazioni allora impiegate per le rilevazioni si è ritenuto di interesse operare una nuova mappatura mediante sistemi di telerilevamento passivo da piattaforma aerea. Inoltre i dati cosi ottenuti sono stati confrontati con dati analoghi acquisiti da piattaforma satellitare per essere poi confrontati con le rilevazioni in situ effettuate in concomitanza con il sorvolo aereo. Materiali e metodi Nell’ambito delle attività di monitoraggio ambientale in capo al Corpo delle Capitanerie di porto Guardia Costiera è stata pianificata ed eseguita una missione di telerilevamento – mediante sistema multispettrale Sensytech AA 1268 ATM – E imbarcato su un velivolo ATR 42 MP in dotazione al Corpo delle Capitanerie di porto Guardia Costiera - ed avente come finalità precipua la mappatura della posidonia oceanica nelle acque circostanti l’isola di Pianosa dell’arcipelago toscano mediante l’algoritmo di Lyzenga. Tale algoritmo, che può essere utilizzato in assenza del dato di profondità, restituisce un “indice di fondale omogeneo” in funzione della riflettanza emergente dalla superficie dell’acqua in due bande spettrali e del rapporto tra i coefficienti di attenuazione diffusa a quelle lunghezze d’onda. L’indice è quindi funzione del tipo di fondale e risulta essere indipendente dallo spessore della colonna d’acqua sovrastante, quindi dalla profondità z mentre. Inoltre, la corretta quantizzazione del coefficiente di attenuazione diffusa permette, in prima analisi, di stimare la trasparenza spettrale del corpo idrico interessato dalla misurazioni oltre che consentire, in seguito, la correzione degli effetti della colonna d’acqua sulla radiazione incidente. La formula che porta a calcolare l’indice di fondale omogeneo deriva da una semplificazione dell’equazione di trasferimento radiativo in acqua ed è la seguente: indice ij= ln ρi – [(Ki/Kj) ln ρj ] 2 1 Dove indiceij è l’indice di fondale omogeneo nelle bande i e j; ln ρi e ln ρj sono i logaritmi naturali delle riflettanze nelle bande i e j; Ki e iKj sonoj i coefficienti di attenuazione diffusa nelle banda i e j. Nell’architettura del progetto i punti di campionamento in situ sono stati localizzati secondo il sistema di riferimento UTM WGS84 e sono state previste acquisizioni diversificate tra terra, mare ed in volo: - da terra in posizione - Lat: 42°35' N - Long: 010° 06’ E – è stato posizionato, su apposito cavalletto di sostegno, un fotometro solare “Microtops II Mod. 540” che, nella fascia oraria compresa tra le 10.00 e le 15.00 Local Time, ha rilevato la misura della radiazione solare diretta a 440, 500, 675, 870, e 936 nm con una frequenza di 30 minuti circa. Tali misure, hanno consentito la determinazione dello spessore ottico degli aerosol e del vapore acqueo totale, onde poter procedere alla correzione atmosferica delle immagini telerilevate. - in mare mediante unità navali del Corpo (Motovedette CP 286 e CP 553) dalle quali sono stati impiegate le seguenti strumentazioni: o Spettroradiometro portatile tipo Fieldspect Handheld II mediante il quale sono state effettuate rilevazioni superficiali e sub superficiali eseguite secondo il protocollo del “Sea Viewing Wide Field of View Sensor” (Sea WiFS), che hanno consentito l’acquisizione dei seguenti parametri finalizzati alla determinazione della trasparenza spettrale della colonna d’acqua onde ricavare i pertinenti coefficienti di attenuazione diffusa: radianza emergente al di sopra della superficie dell’acqua; radianza del cielo; radianza del pannello bianco di riferimento; irradianza totale discendente al di sopra della superficie dell’acqua; radianza del fondale irradianza discendente al di sotto la superficie dell’acqua a step di circa 50 cm. o Batiscopio guarda fondo all’interno del quale è stata posizionata una macchina fotografica digitale che ha consentito di fotografare, per ogni sito di rilevazione spettroradiometrica, la relativa copertura e tipologia del fondale. o GPS portatile con correzione differenziale per la geo-localizzazione dei rilievi; o Termometro di precisione necessario per la rilevazione della SST (Sea Surface Temperature) onde confrontare i valori di temperatura ottenuti dall’elaborazione della banda TIR (Thermal Infra Red) del sensore multispettrale imbarcato sul velivolo con i relativi valori in situ. - In volo La pianificazione del vettore aereo è stata operata considerando che la medesima fosse eseguita mediante sistema multispettrale [Sensytech AA 1268 ATM – E] sebbene, per la tipologia di rilevazione da effettuarsi, sarebbe stato ottimale l’impiego del sensore iperspettrale [CASI 1500] di nuova acquisizione ma all’epoca delle rilevazioni non ancora pienamente operativo. 3 Tab. 1 – Caratteristiche spettrali del sensore Sensytech AA 1268 ATM – E Nella circostanza, si segnalano altresì alcune limitazioni del sistema multispettrale delle quali si è dovuto tenere conto nella pianificazione dell’attività di che trattasi. Sun Glint: Per evitare o limitare tale effetto sono stati simulati diversi orientamenti delle tratte ad orari differenziati onde poter scegliere l’orientamento e la fascia oraria ottimale. Sovrapposizione delle tratte: Per ovviare ad un noto problema per cui lo stesso target viene rilevato, dal punti di vista spettrale, in maniera differente a seconda che si trovi sul lato destro o sinistro dell’immagine telerilevata è stato necessario operare una sovrapposizione del 50 % tra una tratta e quella ed essa contigua. Orientamento delle tratte: A seguito di quanto riportato al punto precedente è stato necessario orientare le tratte tutte da Est verso Ovest (rotta 270°); Quota di rilevazione: data la vetustà del sistema è stato più volte accertato che immagini rilevate alla massima velocità di scansione sono risultate affette da disturbi che ne inficiavano il dato acquisito. Pertanto al fine di evitare tale problematica si è scelta la quota di 762 mt. che, relazionata ad una velocità di 269,3 Km/h dell’aereo consente una rilevazione ad uno scan rate di 50 scansioni al secondo. Georeferenziazione: Come noto il sistema multispettrale Sensytech non è asservito ad una piattaforma girostabilizzata né ad un ricevitore GPS 4 differenziale pertanto non sono state pianificate tratte interamente ricadenti su mare poiché non georiferibili. Tab. 2 – Tabella parametri di volo vettore aereo In post processing l’attività di elaborazione dei dati raccolti con il sistema multispettrale sopra citato ha seguito i seguenti step: - - - Calibrazione radiometrica. I dati digitali registrati nei 12 canali sono stati convertiti in “radianza al sensore” facendo uso dei coefficienti (gain e off-set) calcolati preliminarmente al volo sull’apposito Test Bench in dotazione al pertinente reparto aereo che gestisce il sistema multispettrale. Correzione geometrica. Le immagini acquisite sono state corrette, mediante procedure dedicate, dalle distorsioni di tipo panoramico e da sovra scansione. La georeferenziazione delle immagini è stata, invece, effettuata manualmente mediante il riconoscimento di GCP (Ground Control Point) su immagini di riferimento. Correzione atmosferica. La correzione atmosferica nei canali delle bande comprese tra 400 e 2500 nm (canali da 1 a 10) è stata operata mediante il modello di trasferimento radiativo 6S Code (Second Simulation of the Satellite Signal in the Solar Spectrum) mentre la correzione atmosferica della banda TIR, 8.5 – 14.0 µm, è stata effettuata mediante una procedura empirica interna al Reparto e già validata nel corso degli ultimi anni. Quest’ultima procedura prevede il sorvolo e l’acquisizione di dati sulla medesima area ma a tre differenti quote di sorvolo. I dati così raccolti, opportunamente convertiti in radianza di corpo nero al sensore, sono messi in regressione lineare con le rispettive quote di acquisizione (J.R. Schott 2007). Dall’esame dei rilievi effettuati dal velivolo a quote medio-basse (da 500 a 3.500 mt) si è constatato, sperimentalmente, che la radianza al sensore nell’Infrarosso Termico diminuisce all’aumentare della quota secondo una legge approssimativamente lineare. Sfruttando tale caratteristica, è possibile correggere atmosfericamente le immagini rilevate nell’infrarosso termico senza avvalersi di un programma di correzione atmosferica e dei conseguenti parametri richiesti (modello atmosferico, contenuto 5 - - colonnare di vapor acqueo, etc.). In tal modo si sono ottenute differenze dell’ordine del decimo di grado tra la temperatura (SST) restituita dalle immagini nel termico e le misurazioni in situ effettuate, contestualmente al sorvolo, mediante termometro di precisione. Mappatura dei fondali. Preliminarmente si è proceduto, per ciascuna tratta, ad isolare il mare dal dominio emerso attraverso una procedura di masking logico con il sw Envi 4.5. Come già riferito per la caratterizzazione dei fondali è stato impiegato l’algoritmo di Lyzenga che ha la caratteristica di poter essere impiegato anche in assenza del dato di profondità e che restituisce un indice di fondale omogeneo in funzione della riflettanza emergente dalla superficie dell’acqua in due bande spettrali (i j) nonché del rapporto tra i relativi coefficienti di attenuazione diffusa. L’indice così ottenuto è quindi funzione del tipo di fondale ed è indipendente dallo spessore della colonna d’acqua che lo sovrasta. Classificazione Sebbene siano stati esclusi i canali 1 e 6 giudicati l’uno eccessivamente disturbato dallo scattering atmosferico e l’altro non congruo con le aspettative, sono stati ottenuti indici di fondale omogeneo nei restanti canali (2, 3, 4 e 5), ottenendo, mediante le varie combinazioni, 6 bande sintetiche, sufficienti per l’applicazione di algoritmi di classificazione supervised come l’algoritmo SAM (Spectral Angle Mapper) onde procedere alla tematizzazione dell’immagine. Si precisa che per l’applicazione dell’algoritmo di classificazione supervised sono state utilizzate le osservazioni in situ effettuate con il batiscopio con annessa macchina fotografica - grazie alle quali è stato possibile censire aree di fondale omogeneo sulle quali addestrare il classificatore. Figura. 1 – 6 a) Batiscopio guarda fondo con annessa macchina fotografica; b) Foto fondale sabbioso in pos. 42°35’23”N – 010°05’42”E; c) Foto fondale roccioso in pos. 42°35’20”N – 010°03’29”E; d) Foto fondale con posidonia in pos. 42°35’57”N – 010°05’28”E - Confronto con immagini Rapid-Eye Rapid-Eye è una costellazione satellitare (di proprietà della BlackBridge) unica nel campo dell'osservazione della terra dallo spazio poiché è costituita da cinque satelliti artificiali elio-sincroni, allineati sulla stessa orbita e perfettamente identici, che permettono l'acquisizione di immagini alla risoluzione di 5 metri nelle seguenti bande multi spettrali: Tab. 3 – Caratteristiche spettrali Immagini Rapid-Eye Le immagini elaborate sono state acquisiste in data 6 luglio 2013, ovvero circa un mese prima delle rilevazioni aeree ma, stante la scarsa dinamicità del fenomeno da monitorare (limite superiore della prateria di posidonia), le stesse sono state considerate congruenti. Sulle immagini in questione, corrette atmosfericamente mediante il modulo Flaash in ENVI, è stato operato un resize spettrale mediante il quale sono state escluse le bande B4 e B5 poiché eccessivamente interessate dal fenomeno di abbagliamento dovuto al Sun Glint oltre che per l’opacità che il corpo idrico oppone alla penetrazione in tali lunghezze d’onda. Le restanti bande sono state elaborate analogamente alle immagini raccolte dal velivolo e, successivamente poste a confronto. 7 Figura 2 – a) immagine RapidEye in composizione RGB colori veri; b) immagine RapidEye classificata secondo l’algoritmo di Lyzenga; c) carta bionomica risultante. Dal confronto tra le immagini Rapid-Eye, Sensytech AA1268ATM-E, fotografiche (sia dal velivolo che mediante batiscopio guarda fondo) ed in relazione alle acquisizioni video operate a mezzo R.O.V. (Remote Operated Vehicle) disponibile sulla motovedetta CP 286 è stato possibile realizzare una carta bionomica rappresentativa delle seguenti classi di fondale: Sabbia; Non vegetato (fondale roccioso) Fondale vegetato_1 (posidonia mediante accertamento in situ); Fondale vegetato_2 (non censito compiutamente poiché a profondità in cui la penetrazione della radiazione luminosa è ridotta a pochissime bande spettrali. Sono state effettuate indagini spot mediante ROV che hanno rivelato la presenza di posidonia sino alla profondità di 35 mt di fondale ma tali rilevazioni sono state numericamente troppo esigue da poter essere generalizzate a tutto il fondale circostante l’isola - 8 Serendipity Con detto termine si indica, in inglese “lo scoprire qualcosa mentre si sta cercando qualcos’altro”. Nel presente lavoro era, inizialmente prevista la rilevazione dei dati mediante sistema iperspettrale CASI 1500. Tale apparato acquisisce i dati nel range Visibile e Vicino Infrarosso. Per una serie di circostanze le rilevazioni sono state invece effettuate con il sistema Multispettrale Sensytech AA 1268 ATM-E anch’esso in grado di acquisire i dati nel range Visibile e Vicino Infrarosso sebbene con una minore risoluzione spettrale. Tale sistema è però in grado di acquisire dati anche nella banda dell’Infrarosso Termico con la quale è stato possibile determinare la distribuzione della temperatura superficiale del mare. Tale analisi ha posto in evidenza una anomalia termica ubicata ad ovest del “Golfo della Botte” dell’isola di Pianosa compatibile con una sorgente di acqua dolce. Sono attualmente in corso ulteriori indagini tese a validare la suddetta circostanza. Figura 3 – particolare dell’immissione più fredda rilevata ad ovest del Golfo della Botte; Risultati Nella presente attività è stato possibile rilevare con puntualità il limite superiore della prateria di posidonia insistente nei fondali circostanti l’isola di Pianosa. È stato inoltre possibile realizzare una carta bionomica con un dettaglio impensabile all’epoca delle ultime campagne di monitoraggio operate, tra la fine degli anni ’90 e gli inizi del 2000, con metodi tradizionali. Inoltre la mappatura operata nella banda dell’infrarosso termico ha consentito di evidenziare una immissione costiera che, stante la quasi assenza di attività antropica sull’isola appare riconducibile ad una affioramento di acqua dolce di origine naturale. In merito sono attualmente in corso attività di approfondimento finalizzate alla classificazione dell’anomalia termica rilevata. 9 Conclusioni Le attività di monitoraggio condotte hanno confermato, qualora ce ne fosse ancora bisogno, l’estrema rilevanza del telerilevamento quale tecnica fondamentale ed a basso impatto ambientale per il monitoraggio degli indici di qualità delle acque marine e, nella fattispecie, nell’attività di censimento delle praterie di posidonia oceanica. Tale risultato appare di rilievo soprattutto in quanto il Corpo delle Capitanerie di porto, in virtù degli specifici compiti connessi alla protezione dell’ambiente in generale, e di quello marino in particolare, dispone di velivoli dotati di sistemi multi – iperspettrali che consentono risoluzioni geometriche proibitive per molti satelliti. In più la versatilità del mezzo aereo rende indipendenti le acquisizioni dalle più stringenti orbite dei satelliti consentendo risoluzioni temporali molto spinte con direttrici di volo che, di volta in volta, possono essere variate in funzione delle circostanze. Completa il sistema di rilevazioni una pluralità di vettori navali e terrestri attrezzati per effettuare campionamenti in situ sull’intera fascia marina di competenza nazionale. Non v’è dubbio che il suddetto dispositivo aeronavale non può non essere inserito in maniera sistemica con le acquisizioni satellitari che oggigiorno consentono risoluzioni spaziali, spettrali e temporali impensabili sino a quale decennio fa. Figura 4 – Confronto tra l’estratto della carta bionomica effettuata con metodi tradizionali (a sinistra) e quella ottenuta con il telerilevamento (destra). 10 Ringraziamenti Si ringrazia il CF (CP) Andrea SANTINI Comandante della Capitaneria di porto di Portoferraio per la preziosa opera di assistenza logista ed operativa fornita. Un analogo ringraziamento è indirizzato al personale delle motovedette costiere CP 286 e CP 553 che ci ha supportato nell’attività di raccolta dati; Si ringrazia inoltre il Prof. Marco Marcelli ed il suo staff per i preziosi suggerimenti oltre che per la costante collaborazione durante l’attività di acquisizione dati in situ e nella successiva fase di processing. Bibliografia [1] Jerlov N.G., “Marine Optics” Elsevier Oceanography Series (1976) 14, 231. [2] Lyzenga D.R., “Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data”, Int. Journal of Remote Sensing (1981), vol. 2, 1:71-82. [3] Mobley C.D., “Light and Photosynthesis in acquatic ecosystems” (1994) Cambridge University Press, 509. [4] Vermote E.F., Tanrè D., Deizè J.L., Herman M., Morcrette J.J., “Second Simulation of the Satellite Signal in Solar Spectrum, 6S: An Overview” – Trans. On Geo. And Remote Sensing, (1997) 35:675-686. [5] Palmitessa E., - Telerilevamento multi-temporale da satellite per la mappatura dei macrodescrittori di qualità delle acque lacustri”, Tesi di Laurea, Politecnico di Milano, I Facoltà d’Ingegneria - Corso di Laurea in Ingegneria Ambientale, (Anno Accademico 2000-2001). [6] Salviato S., Barbaro J., Braga F., Alberotanza L., “Analisi spettrale delle fanerogame marine in laguna di Venezia”, Rivista Italiana di Telerilevamento, (2005) 33/34:91107. [7] Alberotanza L., Cavalli R., Pignatti S., Zandonella A. - “Classification of submersed aquatic vegetation of the Venice lagoon using MIVIS airborne data”, Annals of Geophysics (2006), 1:271-276. [8] Albert A., Peter G. – “Inversion of irradiance and remote sensing reflectance in shallow water between 400 and 800 nm for calculations of water and bottom properties” , Applied Optics (2006), 45:2331-2343 [9] J.R. Schott – “Remote Sensing – The Image Chain Approach” (2007), 268-269. [10] Bresciani M., Giardino C., Matta E. – “Il contributo del telerilevamento all’interno del progetto EULAKES”- (Atti 15a Conferenza Nazionale ASITA – Reggia di Colorno 15 – 18 novembre 2011), 492-495. 11
© Copyright 2026 Paperzz