` DEGLI STUDI ROMA TRE
UNIVERSITA
Dipartimento di matematica e fisica
Corso di Laurea Magistrale in Matematica
Tesi di Laurea Magistrale in Matematica
Superficie Minima di Costa:
Immersione ed Embedding
SINTESI
Candidato
Relatore
Federico Di Rienzo
Prof. Massimiliano Pontecorvo
Anno Accademico 2012/2013
Introduzione
Il termine superficie minima inizi`o a circolare negli ambienti matematici intorno alla met`a del diciottesimo secolo, attraverso gli scritti di Gauss e di
Lagrange, volti alla ricerca di una soluzione del problema dell’esistenza di
una superficie, limitata da una curva chiusa, che minimizzasse l’area. Come
vedremo successivamente l’uso del termine minimo riferito a queste superfici `e in realt`a improprio. Nella prima met`a dell’Ottocento matematici come
Legendre, Monge, Sherk e Catalan si interessarono alla ricerca di tali superfici proponendone esempi e giungendo a risultati rilevanti; per esempio
Catalan, dimostr`o che l’unica superficie minima rigata `e l’elicoide. I problemi che suscitavano maggior interesse erano il cos`ı detto “Problema di
Bjorling” e il “Problema di Plateu”. Il primo riguardava la ricerca di una
superficie minima che avesse una data curva come sua geodetica; il secondo,
invece, la ricerca di una superficie minima avente un dato bordo. Con la
convergenza dell’analisi complessa nella risoluzione di queste questioni, la
ricerca delle superfici minime si arm`o di mezzi pi`
u sofisticati che permisero di raggiungere risultati notevoli, come la formula di rappresentazione di
Weierstrass o le formule di Enneper. Nel secondo quarto dello scorso secolo
si giunse alla soluzione completa del problema di Plateu grazie ai lavori di
Jesse Douglas e Tibor Rad`o; venne formulato il problema di Bernstein, se
la minimalit`a del grafico di una funzione su Rn−1 , considerato come superficie in Rn , fosse legato alla linearit`a della funzione, mentre Osserman si
concentr`o sulle superfici minime di curvatura totale finita. Importantissimo
fu il lavoro del matematico brasiliano da Costa agli inizi degli anni ottanta;
egli scopr`ı infatti una nuova superficie, detta superficie di Costa, la quale
inifici`
o la congettura secondo la quale le uniche superfici minime complete
in R3 fossero il piano, l’elicoide e il catenoide. Nei suoi studi si rivel`o fondamentale un nuovo strumento, il computer, che permise di graficare e quindi
visualizzare concretamente le superfici studiate. Ancora oggi lo studio delle
superfici minime risulta importante in alcuni ambiti della fisica matematica
(ad esempio nella “positive mass conjecture” o nella “Penrose conjecture”),
dell’ingegneria molecolare e nella scienza dei materiali. Non di meno ci sono
applicazioni anche nell’ambito delle arti, ad esempio in architettura o nelle
opere di Robert Engman.
2
3
Siamo oggi in grado di definire le superfici minime in 8 modi differenti, [13],
ognuno legato alla particolare applicazione che se ne pu`o fare:
a
Definizione 1. Sia X : M → R3 un’immersione isoterma da una 2-variet`
riemanniana in R3 , con X = (x1 , x2 , x3 ). Allora questa `e una carta locale
minima se xi `e una funzione armonica per ogni i.
Definizione 2. Una superficie Σ `e minima se e solo se la sua curvatura
media H si annulla in ogni punto.
o essere localDefinizione 3. Una superficie Σ `e minima se e solo se pu`
mente espressa come grafico di una funzione f (u, v) che risolve la seguente
equazione alle derivate parziali del secondo ordine, non lineare:
fuu (1 + fv2 ) − 2(fu fv )fuv + fvv (1 + fu2 ).
Definizione 4. Una superficie Σ ⊂ R3 `e minima se e solo se `e un punto
critico per la funzione variazione d’area:
Z Z p
¯ =
A(t) = A(Xt (D))
E t Gt − (F t )2 dudv
¯
D
.
Definizione 5. Una superficie Σ `e minima se e solo se ogni punto p ∈ Σ
ha un intorno avente la pi`
u piccola area rispetto al suo bordo.
Definizione 6. Un’immersione conforme X : M → R3 `e minima se e solo
se ogni punto p ∈ M ha un intorno con la pi`
u piccola energia di Dirichlet,
relativamente al suo bordo.
Definizione 7. Una superficie Σ ⊂ R3 `e una superficie minima se e solo
se ogni punto p ∈ Σ ha un intorno Dp che `e uguale all’unica soap films
idealizzata, avente ∂Dp come bordo.
Nota 1. Se, da un punto di vista fisico, consideriamo una membrana separante due mezzi, allora la sua curvatura media dipender`
a, tramite una
costante non nulla, dalla differenza di pressione tra i due mezzi; in particolare se tale differenza `e nulla, sar`
a nulla anche la curvatura media della
membrana. Ecco perch`e le soap films sono una realizzazione fisica nello
spazio del concetto di superficie minima.
4
Definizione 8. Una superficie Σ ⊂ R3 `e minima se e solo se la proiezione
stereografica dell’applicazione di Gauss N : Σ → C ∪ {∞} `e una funzione
meromorfa.
Durante la nostra trattazione avremo modo di mostrare come effettivamete alcune di queste siano equivalenti tra loro, rimandando per le altre alla
bibliografia. Questa tesi si svilupper`a nel modo seguente:
Nel primo capitolo forniremo delle nozioni base di geometria differnziale e di
analisi complessa, nozioni che saranno necessarie per comprendere i passaggi dei successivi capitoli. Nel secondo ci soffermeremo invece sulle superfici
minime e in particolar modo sulla loro definizione come variazione normale
della funzione area, iniziando a mostrare alcune delle loro principali propriet`a. Nel terzo capitolo dimostreremo la formula di rappresentazione di
Weierstrass, strumento necessario per l’immersione della superficie di Costa
in R3 . Approfondiremo inoltre la trattazione delle superfici minime, soffermandoci in particolare sulla loro applicazione di Gauss e curvatura totale.
Per applicare al nostro caso la formula di Weierstrass dovremo ricorrere
alla funzione P(z) di Weierstrass, una fondamentale funzione ellittica; per
tale motivo il quarto capitolo della tesi sar`
a incentrato sulla presentazione di tale funzione e di alcune sue propriet`a. Nel quinto capitolo saremo
quindi in grado di esporre il risultato principale, dimostrando sia l’immersione che l’embeddedness della superficie di Costa. Infine nel sesto e ultimo
capitolo presenteremo i comandi necessari per rappresentare, attraverso il
software Mathematica, la superficie studiata. In questo estratto riportiamo
i principali risultanti, provenienti per lo pi`
u dal quinto capitolo.
5
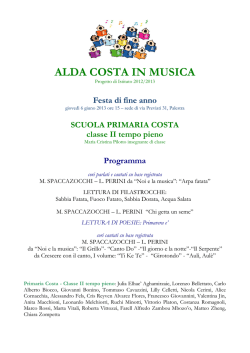
Figura 1: Superficie di Costa
Immersione ed embedding
della superficie di Costa
Mostreremo inizialmente come sia possibile immergere la superficie di Costa
in R3 [7] e come, partendo da tale risultato, si arrivi a dimostrarne anche
l’embeddedness [9]. Concluderemo con un accenno alla generalizzazione di
tale risultato a superfici di gene k ≥ 1 e 3 fini [10]. Un potente strumento,
che ci permetter`
a di raggiungere il primo risultato cercato, `e la seguente
Formula di rappresentazione di Weierstrass. Siano f (z) e g(z) due
funzioni meromorfe definite in una regione U ⊂ C. Fissato z0 ∈ U si
definiscono
R
z f (w)
2 )dw
x
(z)
=
<
(1
−
g(w)
1
R z 0 2
z
2 )dw
x2 (z) = < z0 if (w)
(1
+
g(w)
2
R
x3 (z) = < z f (w)g(w)dw
z0
(1)
e quindi l’applicazione X(z) = (x1 , x2 , x3 ), dove abbiamo posto z = u + iv.
Vale la seguente proposizione:
Proposizione 2. Ogni superficie minima semplicemente connessa immersa
in R3 pu`
o essere rappresentata attarverso la carta locale definita tramite la
formula di rappresentazione di Weierstrass, in cui le funzioni f (z) e g(z)
hanno le propriet`
a del lemma precedente e la regione U pu`
o essere o il disco
unitario o l’intero piano complesso, e l’integrale calcolato su un qualunque
arco contenuto in U dal punto z0 al punto z. La superficie `e regolare se e solo
se f (z) soddisfa la propriet`
a aggiuntiva che si annulla solo nei poli di g(z)
ed ha in questi punti uno zero il cui ordine `e esattamente il doppio di quello
del polo di g(z). Indicheremo talvolta con (f (z), g(z)) la rappresentazione di
Weierstrass associata alle funzioni f (z) e g(z).
6
7
Nota 3. Faremo riferimento ad una rappresentazione di Weierstrass con la
forma (f, g), evidenziando le funzioni a cui la applichiamo.
Teorema (Costa) 4. [7] Esiste un’immersione minima completa in R3 di
genere 1 e 3 fini, con le seguenti propriet`
a:
1. La sua curvatura totale `e −12π.
2. I suoi fini sono embedded.
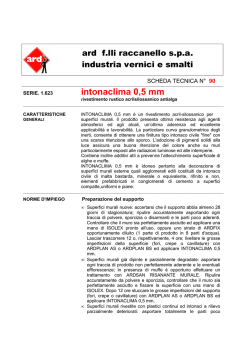
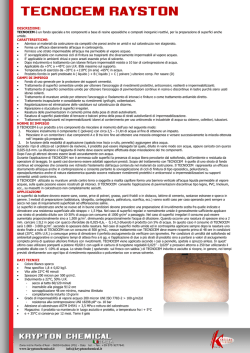
La dimostrazione di questo teorema `e basata √sull’utilizzo della formula (f (z), g(z)), con f (z) = P(z)dz e g(z) = 2eP10 (z)2π . P(z) `e una fondamentale funzione ellittica, detta P di Weierstrass, che definiremo sul reticolo L(1, i),formato cio`e da quadrati, all’interno dei quali P(z) sviluppa le
seguenti simmetrie:
ä
1+ä
Ω1 + ä
V
IV
VI
III
Ω2 + 1
Ω2
VII
II
VIII
0
I
Ω1
1
Figura 2: FPP
Lemma 5. Sia P(z) definita sul reticolo L(1, i); concentrandoci sul FPP ,
Fig. 2, e ponendo ω1 = 1/2, ω2 = i/2 e ω3 =
i+1
2 ,
valgono allora le seguenti
relazioni:
P(α(ω3 + z)) = −P(ω3 + z) con α(ω3 + z) = ω3 + i¯
z riflessione rispetto alla
diagonale positiva;
P(ρ(ω3 + z)) = −P(ω3 + z) con ρ(ω3 + z) = ω3 + iz rotazione di
π
2
intorno
a ω3 ;
P(β(ω3 + z)) = P(ω3 + z) con β(ω3 + z) = ω3 + z¯ riflessione rispetto alla
retta orizzontale.
Prendendo spunto dal lavoro di Costa, i matematici William H. Meeks
e David A. Hoffman sono riusciti a dimostrarne anche l’embeddedness. Presenteremo ora il percorso che porta a tale risultato. La strategia seguita `e
8
la seguente:
dimostreremo come prima cosa l’esistenza di un embedding per Σ al di fuori di un insieme compatto K sufficientemente grande nella proposizione 6;
sfruttando poi le simmetrie di Σ, derivanti dalle simmetrie della funzione P,
dimostreremo l’embedding per una delle otto parti in cui `e possibile scomporrre Σ, estendendo il risultato alle rimanenti sette e quindi a tutta la
superficie. Iniziamo quindi dalla seguente:
Proposizione 6.
1. I fini di Σ sono paralleli.
2. Fuori da un insieme compatto K ⊂ M sufficientemente grande X `e
un embedding.
3. La terza coordinata X3 (z) ha il seguente comportamento avvicinandosi
ai fini:
se z → ω1 , X3 (z) → −∞
se z → ω2 , X3 (z) → +∞
se z → 0, X3 (z) → 0 e il fine E0 `e asintotico ad un piano x3 =costante.
Dimostrata questa prima parte, passiamo ora allo studio delle simmetrie
di Σ. Sia G il gruppo diedrale con 8 elementi; considereremo che G agisca
su FPP attraverso le riflessioni per le rette verticali, orizzontali ed oblique
passanti per ω3 , e rotazioni di multipli di π/2 intorno ad ω3 . Gli elementi
di G risultano quindi essere:
• β(ω3 + z) = ω3 + z¯
riflessione rispetto alla retta orizzontale;
• ρk (ω3 + z) = ω3 + (ı)k z
1, 2, 3;
rotazione di kπ/2 di centro ω3 e con k =
• α(ω3 + z) = ρ(β(ω3 + z)) = ω3 + i¯
z
positiva;
riflessione rispetto alla diagonale
• α
ˆ (ω3 + z) = ρ2 (β(ω3 + z)) = ω3 − z¯ riflessione rispetto alla retta
verticale;
• µ(ω3 + z) = ρ3 (β(ω3 + z)) = ω3 + i¯
z riflessione rispetto alla diagonale
negativa.
Come si vede chiaramente dalla definizione di questi elementi, G risulta
generato da β e ρ. Possiamo anche considerare l’azione di G su tutto R3 ,
identificando β e ρ rispettivamente con le matrici
9
1 0 0
B = 0 −1 0 ,
0 0 1
0 −1 0
0 .
R = 1 0
0 0 −1
Abbiamo quindi il seguente teorema:
Teorema 7. G agendo su R3 , `e un gruppo di simmetrie di Σ ⊂ R3 . L’immersione X : M −→ R3 `e compatibile con l’azione di G su M e R3 .Cio`e:
1. X ◦ ρ = R
2. X ◦ β = B.
Nella metrica indotta su M , gli elementi di G sono isometrie.
I seguenti corollari ci evidenziano immediatamente le cercate simmetrie
di M :
Corollario 8.
1. I piani x2 = 0 e x1 = 0 sono piani di simmetria per
Σ = X(M ); i segmenti ω2 , 1 + ω2 e 0, 1 sono mandati nel piano x2 = 0,
mentre i segmenti ω1 , ω1 + i e 0, i sono mandati nel piano x1 = 0.
2. L’ isometria α = ρ ◦ β di M (ossia la riflessione rispetto alla diagonale
positiva di FPP ) `e compatibile con la simmetria di Σ dovuta a RB,
cio`e una rotazione di π intorno alla retta x1 − x2 = x3 = 0
Corollario 9. Σ `e formata da 8 pezzi tra loro congruenti. Ognuno di essi
`e isometrico a X(T ), con T ∈FPP definito come:
1
1
T = {u + iv| ≤ u ≤ 1; ≤ u ≤ v} r {ω2 + 1, i + i}.
2
2
Tali isometrie sono quelle contenute in G.
10
Figura 3: X(T )
Nota 10. T cos`ı definito corrisponde al triangolo III nella figura 2.
I prossimi 4 lemmi serviranno per spiegare quale sia l’immagine del bordo
dell’insieme T attraverso la carta locale X(z).
Lemma 11. Data la componente X3 (z) della carta locale di Weierstrass,
allora risulta X3 (z) > 0 ⇔ z ∈ M r (A ∪ β(A)) e X3 (z) = 0 ⇔ z ∈ L con
L = 0, 1 + i ∪ i, 1,
e A il triangolo di vertici O, 1 e ω3 di Fig. 2, in cui <(P(z)) > 0. Inoltre
X(z) manda iniettivamente la diagonale con pendenza positiva sulla retta
x1 − x2 = x3 = 0 e la diagonale con pendenza negativa sulla retta x1 + x2 =
x3 = 0.
Lemma 12. Per δ > 0 sufficientemente piccolo, X(z) `e un embedding
sull’insieme:
{z ∈ M |
Lemma 13. Il segmento ω3 , ω3 +
|X3 (z)| < δ}.
1
2
`e mandato in maniera iniettiva in una
curva contenuta nel quadrante non negativo del piano x2 = 0. La curva
incontra gli assi solo in X(ω3 ) = 0.
Lemma 14. Il segmento ω2 , i `e mandato da X nel semipiano superiore del
` un grafico lungo il semiasse positivo x3 e il valore x2 → ∞
piano x1 = 0. E
quando ci si avvicina a ω2 o i.
Dalla seguente proposizione si vede in particolare come ω2 , i `e mandato
nel piano x1 = 0.
11
Proposizione 15. Sia T ⊂FPP il triangolo definito come
1
1
T = {u + iv| ≤ u ≤ 1; ≤ u ≤ v} r {ω2 + 1, i + i}
2
2
e sia R = T ∪ α
ˆ (T ) (l’unione dei triangoli III e V I in figura 2), allora X(z)
manda l’interno di R nell’ insieme
E = {(x1 , x2 , x3 )|x2 > 0,
x3 > 0}
1+ä
T
Ω2 + 1
Ω3
Figura 4: T
Siamo ora in grado di dimostrare che X(z)|T `e un embedding:
Proposizione 16. Sia T il triangolo definito in precedenza; allora
X(z)|T
`e un embedding di T nell’ottante non negativo di R3 , che manda T nel bordo
˚ nell’interno.
eT
Risultato che pu`
o essere quindi esteso a tutta la superficie, grazie alle
isometrie di G:
Teorema 17. Sia X : M → R3 la carta locale definita tramite la formula
di rappresentazione di Weierstrass con funzioni f = P(z) e g =
a
,
P0 (z)
allora
X(z) `e un embedding.
Prendendo spunto da questo risultato, gli stessi autori D.A. Hoffman
e W.H. Meeks, sono riusciti a dimostrare il seguente teorema che qui ci
limitiamo ad accennare [9]:
12
Teorema 18. ∀
k ≥ 1, esiste una superficie minima completa, corretta-
mente embedded, di gene k e 3 fini. La superficie di gene k, chiamata Mk ,
ha le seguenti propriet`
a:
1. La curvatura totale di Mk `e −4π(k + 2);
2. Mk ha due catenoidi e un piano come fini;
3. Mk interseca il piano x3 = 0 in k + 1 rette che formano angoli uguali
nell’ origine;
4. Rimuovendo una qualsiasi delle rette del punto precedente si disconnette la superficie;
5. L’ intersezione di Mk con un qualsiasi piano parallelo (ma non uguale)
al piano x3 = 0 `e una curva di Jordan;
6. Il gruppo delle simmetrie di Mk `e il gruppo diedrale con 4(k+1) elementi generato da
1 0 0
0 −1 0
0 0 1
e
Rk
0
0
0 0 −1
con Rk matrice di una rotazione di π/(k + 1) nel piano x3 = 0;
7. Mk pu`
o essere scomposta in 4(k + 1) parti congruenti;
8. Mk `e l’unica superficie minima correttamente embedded di gene k con
3 fini, curvatura totale finita, e un gruppo di simmetria contenente
almeno 4(k + 1) elementi.
Bibliografia
[1] Manfredo P. do Carmo. Differential Geometry of Curves and Surfaces.
Prentice-Hall.
[2] A. Gray. Modern Differential Geometry of Curves and Surfaces with
c
M AT HEM AT ICA
, second edition. CRC press, 1998.
[3] L. V. Ahlfors. Complex Analysis, third edition. McGraw-Hill Book
Company.
[4] E. Sernesi. Geometria 2. Bollati Boringhieri, 2006.
[5] R. Osserman. A Survey of Minimal Surfaces. Dover Publications.
[6] E. Pap. Complex Analysis through Examples and Exercises. Kluwer
Academic Publishers.
[7] C. Costa. Examples of a Complete Minimal Immersion in R3 of Genus
One and Three Embedded End. Bull. Soc. Bras. Mat. 15 (1984), 47-54.
[8] L. P. Jorge, W. H. Meeks III. The Topology of Complete Minimal
Surfaces of Finite Total Gaussian Curvature. Topology 22 (1983),
203-221.
[9] D. Hoffman, W. H. Meeks III. Embedded minimal Surfaces of Finite
Topology. Ann. Mat. 131 (1990), 1-34.
[10] D. Hoffman, W. H. Meeks III. A Complete Embedded Minimal Surface
in R3 With Genus One and Three Ends. J. Dif. Geom. 21 (1985), 109127.
[11] E. H. Neville. Elliptic Functions: a Primer. Pergamon Press.
[12] F. Tricomi. Funzioni Ellittiche. Nicola Zanichelli Editore, 1937.
[13] W. H. Meeks III, J. Perez. A Survey on Classical Minimal Surfaces
Theory. University Lectures Series Vol. 60, American Mathematical
Society.
13
BIBLIOGRAFIA
[14] O. M. Melko. Visualizing Minimal Surfaces, Rendering Solid Models
with the Aid of 3D Printers. The Mathematica Journal 12 (2010).
[15] A. Huber. On Subarmonic Functions and Differential Geometry in the
Large. Comment. Math. Helv. 32 (1957), 13-72.
[16] M. Cifani. Superfici minime a curvatura totale finita. Tesi sperimentale di Laurea in Geometria, Universit`
a degli studi di Camerino, A.A.
2001/2002.
14
© Copyright 2026 Paperzz