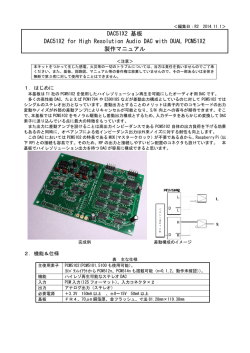
先進運転支援システム(ADAS)を 実現するための76/79GHz帯ミリ波 レーダ・システム・ソリューション FTF-AUT-F0736 Mac Fujimoto | Senior Application Engineer, Analog Sensor Group Yusuke Takemoto | Marketing & Biz development, Auto MCU Group DEC.04.2014 TM External Use Outline 1. 2. 3. 4. 5. 6. このセッションを通じて得られること ADAS分野でのマーケットトレンド、その中でのレーダ・システ ムの位置づけ・重要性 車載レーダの基礎技術 フリースケールのレーダ・ RF のラインナップ フリースケールのレーダ・MCU の特長とラインナップ まとめ TM External Use 2 このセッションで得られること 1. ADAS分野で中心を担うレーダの位置づけ・重要性 2. レーダで物体検知ができる仕組みと高性能レーダ・システムを構 築するための必要な要素技術 3. フリースケールの提供するレーダ RF とMCUの特長 TM External Use 3 ADAS分野でのマーケットトレンド レーダ・システムの重要性 TM External Use 4 Evolution of Advanced Driver Assistance Systems 交通事故が原因で、120万人以上の人が2010年亡くなっていますが、 2020年には190万人にものぼるとの推測がなされています (WHO予測)1 先進運転支援システム (ADAS: Advanced Driver Assistance Systems) は先進国での安全に関する規制に大きく関わっています。 自動制御 事故の予測 事故の防止 Predictive and Warning レーダ検知 カメラ認識など Reactive Systems ABS 事故の緩和 横滑り防止など Passive Systems シートベルト エアバッグなど TM External Use 5 Predictive Actuators ADAS マーケット・トレンド 安全走行 快適な運転 走行制御 周辺監視 • カメラ・レーダを使用 • 特徴点抽出や物体識別の ための認識アルゴリズム • 例. ►車線維持 • 自動運転を可能とする3次 元空間のモデリング • 自己推定機能 • 3次元技術による周辺画 像作成 • • 安全性能を伴う自動駐車 全水平方向からの動作予 測をするための高い機能 安全性 • 多方向からの特徴抽出 例. ►駐車支援 ►周辺監視 ►横切り警報 ►死角検知 ►ACC ►緊急ブレーキ TM External Use 6 走行支援 後方・側方カメラ、周辺 監視レーダ、ソナーを使 用 • ブレーキ・ハンドル操作 を伴う危険回避のために 機能安全要求 自動運転へ 例. ►自動走行 ►センサ・フュージョン レーダ・アプリケーションの分野 衝突軽減 衝突警告 ストップ&ゴー 緊急ブレーキ 死角検知 後部衝突検知 アダプティブ・クルーズコントロール レーダ・システムの強み ・視界不良や天候不良に左右されにくい ・遠距離の物体検知機能 ・先行車両の予測検知機能 TM External Use 7 レーダ・システムの課題 ・各国で異なる電波の法規制への対応 ・省スペース化 ・検知能力を上げるための高速演算 車載レーダの基礎技術 TM External Use 8 車載レーダ・システム RADAR (Radio Angle Detection And Ranging) Gt 送信MMIC/PLL 伝送線路 マイコン - 制御 信号処理 物標認識 物標識別 Pt 角度 (DOA) Ar 距離 (Range) LO 受信MMIC/ 伝送線路 Pr 車載レーダとして得るべき物標物情報 •距離 (Range) •角度 (DOA: Direction Of Arrival) •相対速度 (Range Rate) TM External Use 9 相対速度 (Range Rate) s 距離の検出 (パルスレーダ方式) パルスレーダ f tf t 送信波 受信波 距離と伝搬時間 • • • • • 1000 meters 100 meters 10 meters 1 meter 6.6us 667ns 67ns 6.7ns 超短パルス発生の困難さ (6.7ns=150MHz) 電波法割り当て周波数帯域を逸脱する危険性 相対速度はドプラシフトにより算出 短距離では送信波と受信波が干渉 良好なS/Nが得にくい (空中線電力の制限) TM External Use 10 距離の検出 – FMCW方式 伝搬時間 ホモダイン受信 により得られる 周波数差 • • • 伝搬時間 = 2R / c (2: 往復距離) 周波数差 = fTX – fRx = 2R/c x BW / tchirp ホモダイン受信により、周波数差を抽出 TM External Use 11 相対速度の検出 2 R0 vR t r (t ) s (t t0 ) s t c 0 2 R0 vR t r (t ) sin C t c 0 VR = 相対速度 R0 = 物標までの距離 fC = レーダに使用する周波数(76.5GHz) 2v r (t ) sin C t C R t R c0 2 f C vR 2vR fD c0 fc = 76.5 GHz vR 1 m/s 30 km/h 120 km/h 250 km/h fD 510 Hz 4250 Hz 17 kHz 35.42 kHz Christian Johann Doppler * 1803/11/29ザルツブルグ; † 1853/3/17ベニス TM External Use 12 距離周波数とドプラ周波数 fTX f2 BW f1 fB = 差周波数(ビート周波数) R = 物標までの距離 c0 = 光速 BW = FM変調周波数幅 tchirp = チャープ時間 Dv = 相対速度 DR = 距離分解能 t tchirp fB = fIF = 2 R / c0 x BW / tchirp fDoppler = 2 |Dv| / c0 fTx DR = 0.5 c0 /BW TM External Use 13 特性値 従来FMCW tchirp 2.5ms BW 500 MHz fTx 76.5 GHz R 10 m Dv 50 km/h fB 13 kHz fDoppler 7.08 kHz DR 0.3 m A/D サンプリング: 1MHz (従来の一般的な逐次比較) FFT:2048 points 分離困難 距離周波数とドプラ周波数の分離 送信波 反射波 f0 t 伝搬時間 fBEAT = | fTX – fRX | fBEAT fu ドプラシフト 距離 ∝(fu + fd) 相対速度∝(fu‐fd) fd Fuとfdで、同一物標か別物標 かの推定演算負荷 TM External Use 14 高速チャープ( ファスト・モジュレーション)による解決 fTX fB = 差周波数(ビート周波数) R = 物標までの距離 c0 = 光速 BW = FM変調周波数幅 tchirp = チャープ時間 Dv = 相対速度 DR = 距離分解能 f2 BW f1 t tchirp parameters fB = fIF = 2 R / c0 BW / tchirp fDoppler = 2 |Dv| / c0 fTx DR = 0.5 c0 /BW 2.5 ms 100 us BW 500 MHz 500 MHz fTx 76.5 GHz 76.5 GHz R 10 m 10 m Dv 50 km/h 50 km/h fB 13 kHz 300kHz 7.08 kHz 7.08 kHz 0.3 m 0.3 m DR External Use 15 高速チャープ tchirp fDoppler TM 従来FMCW A/D サンプリング: 10MHz (∑⊿ADC) FFT:512 points ドプラシフトは相対 速度演算に用いない 信号処理 – 距離算出 • 距離 FFT − 高速多数回サンプリングによるS/N向上(10倍サンプリングで10dB) TM External Use 16 信号処理 – 相対速度 速度FFT − Complex to complex − チャープ間の角度差より速度算出 − 多数回サンプリングによるS/N向上 信号強度 • 相対速度 距離 二次元FFTのイメージ TM External Use 17 高速FMCW(ファスト・モジュレーション)まとめ アプリケーション/ システム要求 利点 課題 高速ADC、大量データ、高 速信号処理、高CPU能力を 必要とする SRR, MRR, & LRR レーダ 全方式サポート 複数物標認識, SN比 速度、距離分離容易 高速多サンプリングによるSN比 同上 向上 物標分離、フェーズノイズ 高IF 周波数使用 (500 kHz~10 MHz) のため、低1/fノイズ領域 活用 オープンループVCOも使用可能 VCO,ADC,FMCW波の同期 DAC, 必要 高IF 周波数使用 (500 kHz~10 MHz) のため、BPF、IF可変ゲ インアンプのMMIC内蔵が可能 高速ADCが必要 IF 周波数帯幅 SDADC, DMA,SPT CTE,WGM, PLL+WFG SDADC 低デューティーサイクル運転に よる低消費電力化が可能 消費電力 TM External Use 18 特になし 76GHz車載レーダ・チップセット MR2001 MPC577xK 車載レーダ・システムにて業界トップクラスのシステム・インテグレーション Qorivva MPC577xK • • 等価なモジュール: − 8 ADC − 1 DAC − 1 FPGA − 外部l SRAM モジュール − MCU RF_Rx Filter, Amplifier MPC567xK RF_Tx V C O 利点: − PCBのサイズの縮小 − 製造コストの低減 AA DD CC BB D A C FPGA Previous Generation Signal Processing Timing Controller Chirp Generation SRAM MR2001 76 GHz チップセット • 高集積化パッケージソリューション : − ベアダイイ置き換え − 高信頼、高RF性能の MRD2001 Tx RCPパッケージング技術 − • MRD2001 Rx マイコンのSDADCに最適化した BPF、IFアンプを内蔵 利点: − 低アセンブリコスト − 低PCBコストの実現 TM External Use 19 Next Generation MPC577xK MRD2001 VCO Radar RF-MMIC ロードマップ TM External Use 20 The Radar MCU TM External Use 21 MPC577xK の特長 • • デジタル演算処理を得意とするマイクロコントローラ レーダ信号処理を高速演算できる専用モジュールを搭載 − 該当処理のソフトウェアライブラリは不要 − DSP向けコンパイラは不要 • マルチコアアーキテクチャ − 高速演算処理向け: 2コア − 機能安全に向けたロックステップコア: 1コア • • 大容量SRAMとフラッシュメモリ 車載ネットワークインタフェース マルチコ アMCU DSP 機能 機能安全 MPC 5775k − FD-CAN/FLEXSRAY/ETHERNET • • 機能安全に適用する設計 レーダ・アナログ・ フロントエンド − 高速ADC, DAC, 高精度PLL TM External Use 22 レーダ アナログ・ フロントエ ンド 信号処理 の 専用回路 大容量 SRAM・ フラッ シュ MPC5775K : 2x Z7 + 2x Z4LS – 4 MByte Radar Processing Platform ADC Input 8 x SD – 10MHz Signal processing toolbox 4x 12bit SAR -1MHz FFT COPY Z7 dual is. @266MHz 16kB I-cache 2 way 16kB D-cache 2 way VFPU & SPE2-SIMD Z7 dual is. @266MHz DAC Scheduler DMA 2Ms/s 8 bit DAC 16kB I-cache 2 way 16kB D-cache 2 way Vehicle and ECU Network CPU Platform Master Comm Bus Z4LS @ 133MHz 16kB I-cache 2 way 16kB D-cache 2 way Z4 LS @ 133MHz 8kB I-cache 2 way 128 msg FlexRay 100base T Ethernet SFPU 4kB D-cache 2 way SFPU Intra ECU connectivity LFAST VFPU & SPE2-SIMD Volatile Emb. Memory 1.5MB RAM with ECC NV Memory 4MB with ECC Fabric 64 bit XBAR with E2E ECC Data Input I/F Safety & Support PMU OSC and PLL Connectivity T-Sensor 16 bit PDI 2 x Cross Trig Unit 3 x IIC Safe Memory 2 x FlexPWM (12 ch) 4 x LinFlex Ctrl 4 x dSPI MEMU 3 x eTimers – 6 ch. each 4 x Flex CAN (1FD) SWT & STM FCCU & CRC Specifications: CPU: 3x PPC: 2x Z7 266 MHz Power dual issue with SPE2 and VFPU and Z4 133MHz in permanent lockstep SPT: FFT Accelerator, DMA Analog: Octal SD + 4 SAR, Ultra low jitter PLL, precision DAC Package: 356 PBGA – 0.8 mm pitch – 17 x 17 mm2 body Temp Range (Ta): -40 to 125C, 150 C Tj, AEC-Q100 Grade 1 Main Supply: 3.3V IO and 1.2V Core (ext or PMU) TM External Use 23 Safe DMA DEBUG Nexus 3+ Key Features: F. Safety: developed as per ISO26262 with target ASIL-D Safety Enablement: Safety Manual and FMEDA SPT: Radix4/2, r2c, c2c, 50 MHz 16 bit twiddle, 24 bit results, Copy, Transpose SRAM: Multi ported SRAM Ctrl and 1.5MB SRAM with ECC Top of Class Analogue IP: PLL, DAC, OSC and SD ADC SW Enablement: Safety MCAL ASIL B(D) レーダ・アプリケーション (ファスト・モジュレーション) ADC/DSP/FPGA MPC577xK MMIC Signal conditioning Receiver • Antenna • Mixer • • • • Signal analysis Detection LNA • Power • Window HP/LPF • FFT AAF Range/Doppler ADC Radar Processing Platform ADC Input 8 x SD – 10MHz Signal processing toolbox 4x 12bit SAR -1MHz FFT COPY • Clustering • Kalman Filter Z7 dual is. @266MHz 16kB I-cache 2 way 16kB D-cache 2 way VFPU & SPE2-SIMD Z7 dual is. @266MHz DAC Scheduler 2Ms/s 8 bit DAC DMA Decision Tracking 16kB I-cache 2 way 16kB D-cache 2 way • Safety Decision CPU Platform Z4LS @ 133MHz 16kB I-cache 2 way 16kB D-cache 2 way Z4 LS @ 133MHz 8kB I-cache 2 way SFPU 4kB D-cache 2 way SFPU VFPU & SPE2-SIMD レーダ・システムの集積 高速演算機能の強化 機能安全 TM External Use 24 レーダ ・アプリケーションの実行フロー 高速FFT レーダ RFの 受信データ レーダ RFの 送信制御 高速データ転送が可能なバス構成 • 同時アクセスを可能とする マルチポート SRAMとフラッシュメモリ • TM External Use 25 レーダ向け MCUのラインナップ • 車載レーダ・システムに向けたMCUラインナップを拡充 Mid end High end 90 nm MCU (現行) MPC564xL MPC567xK 55 nm MCU (次世代) MPC574xP MPC577xK 今後もレーダ向けMCUを展開予定 • SPT (信号処理アクセラレータ) の高機能化 •機能安全・演算能力の強化による データフュージョンへの応用 TM External Use 26 まとめ TM External Use 27 まとめ • ADASにおけるレーダ・アプリケーションの重要性 • レーダ・アプリケーション処理に向けたRFとMCUの需要 • フリースケールのレーダ RFとMCUのラインナップとその優位 性 • 今後も車載レーダに向けたソリューションの強化 TM External Use 28 TM www.Freescale.com © 2014 Freescale Semiconductor, Inc. | External Use
© Copyright 2026 Paperzz